PMU Dynamic Performance Requirements
25
PMU Dynamic Requirements for Small-Signal Measurements NASPI Meeting Chattanooga, TN Oct. 7, 2009 Dan Trudnowski Montana Tech [email protected]
-
Upload
daniele-vismara -
Category
Documents
-
view
64 -
download
0
Transcript of PMU Dynamic Performance Requirements

PMU Dynamic Requirements for Small-Signal Measurements
NASPI MeetingChattanooga, TN
Oct. 7, 2009
Dan TrudnowskiMontana Tech

Small-Signal Dynamics
• Modes = 0.2 Hz to 2.0 Hz.• Bandwidth = 0 to 5 Hz.
2

Goals
• Use PMU to accurately measure small-signal system response.
• Use PMU in a feedback damping control loop.
• Issues:– Bandwidth– Delay– Overshoot– Aliasing
3

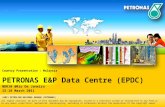
Example Data
4
0 5 10 15-100
-80
-60
-40
-20
PSD
(dB
)
CST5 Custer 500 kV VoltagFreqLFD (Hz) BPA
AmbientProbing
10-1
100
101
-80
-70
-60
-50
PSD
(dB
)
Freq (Hz)

5
A General PMU
Anti-aliasFilter X
tje 602!"
MAFilter
fS1
Post ProcessingFilter
Phasor calculation
)(~ tVv(t)fS2
! = Fourier transform (series) operator. ! MA Filter = Moving average filter (1/30, 1/60, or 1/120 sec.).! fS1 = POW sampling frequency (8*60 Hz, 16*60 Hz, 32*60 Hz, etc.).! fS2 = Phasor reporting frequency (60 Hz, 120 Hz).
# $ # $# $ttfttAtv %!! &'&( 2602sin)()(
) *+,
) *) *) *) *) *) *)(
)(ˆ)(
)()(ˆ)(
)()(ˆ
)(
tftfG
ttG
tAtAG
f
A
',',
(
,,
(
,,
(
-
%%-
-
%# $ # $# $ttfttAtV %!! ˆˆ2602)(ˆ)(~ &'&.(Phasor Signal:
POW Signal: Transfer Functions:

Gain Requirements
60 20 40 60 80 100 120 140
-80
-70
-60
-50
-40
-30
-20
-10
0
10
20
Frequency (Hz)
Gai
n, |G
| (dB
)
Pass band > 5 Hz
Nyquist (fS2/2)
2 Hz width 4 Hz width
Pattern continuesto infinity
Transitionband

Phase Requirements
7Frequency (Hz)
Phas
e,.
G (d
egre
es)
Near Linear phasein pass band
0 1 2 3 4 5-80
-70
-60
-50
-40
-30
-20
-10
0
10
20Phase starts
at 0/
|Phase| < 20/for freq < 2 Hz

Step-Response Requirements
8Time
A e(t)
or%
e(t)
resp
onse
to a
uni
t ste
p in
put
00
0.2
0.4
0.6
0.8
1
1.2
1.4
Settling time < 3Tp
Overshoot < 10%
Peaktime
TpTR
Risetime
Rise time < 0.05 sec.

Requirements Summary• Gain
– REQUIRED: The gain does not exceed -40 dB at frequencies above the Nyquist frequency continuing to infinity.
– REQUIRED: The gain does not exceed -60 dB at frequencies that are harmonics of 60 Hz. The notch at 60 Hz is 2 Hz with linearly increasing notches for higher harmonics.
– REQUIRED: The pass band gain has no ripple and is within 0.5 dB out to 1.5 Hz.– REQUIRED: The corner frequency (-3 dB) must be greater than or equal to 5 Hz.
• Phase– REQUIRED: The phase start 0° at DC. – REQUIRED: The phase must be bound by +20° for all frequencies less than or equal to 2
Hz.– DESIRED: The phase is as linear as possible in the pass band.
• Step Response– REQUIRED: The 90% rise time occurs within 50 msec.– DESIRED: The percent overshoot does not exceed 10%.– REQUIRED: The 2% settling time is less than or equal to 3Tp.
9

10
Examples
Anti-aliasFilter X
tje 602!"
MAFilter
fS1
Post ProcessingFilter
Phasor calculation
)(~ tVv(t)fS2

11
Example 1A(fS2 = 60 Hz)
• MA Filter = Box car, 1/30 sec.• fS1 = 32*60 Hz• No anti-aliasing filter• No post-processing filter
10-1
100
101
102
103
-60
-40
-20
0
Gai
n (d
B)
Phasor signal
10-1
100
101
102
103
-100
-80
-60
-40
-20
0
Frequency (Hz)
Phas
e (d
eg.)
0 50 100 150 200
-60
-40
-20
0
Gai
n (d
B)
Phasor signal
0 50 100 150 200-200
-100
0
100
200
Frequency (Hz)
Phas
e (d
eg.)

12
Example 1A
1 1.05 1.1 1.15 1.2 1.25 1.31
1.05
1.1
1.15
abs(
Vp)
Amplitude step response
1 1.05 1.1 1.15 1.2 1.25 1.3-5
0
5
10
angl
e(Vp
) - d
eg.
Time (sec.)
1 1.05 1.1 1.15 1.2 1.25 1.30.95
1
1.05
1.1
abs(
Vp)
Phase step response
1 1.05 1.1 1.15 1.2 1.25 1.30
5
10
15
angl
e(Vp
) - d
eg.
Time (sec.)
1 1.05 1.1 1.15 1.2 1.25 1.30.95
1
1.05
1.1
abs(
Vp)
Frequency step response
1 1.05 1.1 1.15 1.2 1.25 1.30
0.5
1
angl
e(Vp
) - d
eg.
1 1.05 1.1 1.15 1.2 1.25 1.30
0.01
0.02
del f
(Hz)
Time (sec.)
• MA Filter = Box car, 1/30 sec.• fS1 = 32*60 Hz• No anti-aliasing filter• No post-processing filter

13
Example 1B(fS2 = 60 Hz)
• MA Filter = Box car, 1/30 sec.• fS1 = 32*60 Hz• Band-pass anti-aliasing filter• No post-processing filter
10-1
100
101
102
103
-60
-40
-20
0
Gai
n (d
B)
Phasor signal
10-1
100
101
102
103
-100
-80
-60
-40
-20
0
Frequency (Hz)
Phas
e (d
eg.)
• MA Filter = Box car, 1/30 sec.• fS1 = 32*60 Hz• No anti-aliasing filter• No post-processing filter
10-1
100
101
102
103
-60
-40
-20
0
Gai
n (d
B)
Phasor signal
10-1
100
101
102
103
-100
-80
-60
-40
-20
0
Frequency (Hz)
Phas
e (d
eg.)

14
Example 1B
• MA Filter = Box car, 1/30 sec.• fS1 = 32*60 Hz• Band-pass anti-aliasing filter• No post-processing filter
1 1.05 1.1 1.15 1.2 1.25 1.31
1.05
1.1
1.15
abs(
Vp)
Amplitude step response
1 1.05 1.1 1.15 1.2 1.25 1.3-5
0
5
10
angl
e(Vp
) - d
eg.
Time (sec.)
1 1.05 1.1 1.15 1.2 1.25 1.30.95
1
1.05
1.1
abs(
Vp)
Phase step response
1 1.05 1.1 1.15 1.2 1.25 1.30
5
10
15
angl
e(Vp
) - d
eg.
Time (sec.)
1 1.05 1.1 1.15 1.2 1.25 1.30.95
1
1.05
1.1
abs(
Vp)
Frequency step response
1 1.05 1.1 1.15 1.2 1.25 1.30
0.5
1
angl
e(Vp
) - d
eg.
1 1.05 1.1 1.15 1.2 1.25 1.30
0.01
0.02
del f
(Hz)
Time (sec.)

10-1
100
101
102
103
-60
-40
-20
0
Gai
n (d
B)
Phasor signal
10-1
100
101
102
103
-100
-80
-60
-40
-20
0
Frequency (Hz)
Phas
e (d
eg.)
15
10-1
100
101
102
103
-60
-40
-20
0
Gai
n (d
B)
Phasor signal
10-1
100
101
102
103
-100
-80
-60
-40
-20
0
Frequency (Hz)
Phas
e (d
eg.)
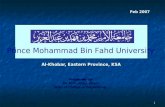
Example 1C(fS2 = 60 Hz)
• MA Filter = Box car, 1/30 sec.• fS1 = 32*60 Hz• Band-pass anti-aliasing filter• Cheby 2 post-processing filter
• At f = 36 Hz, A = 26 dB• 3rd order
• MA Filter = Box car, 1/30 sec.• fS1 = 32*60 Hz• Band-pass anti-aliasing filter• No post-processing filter

16
Example 1C
1 1.05 1.1 1.15 1.2 1.25 1.31
1.05
1.1
1.15
abs(
Vp)
Amplitude step response
1 1.05 1.1 1.15 1.2 1.25 1.3-5
0
5
10
angl
e(Vp
) - d
eg.
Time (sec.)
1 1.05 1.1 1.15 1.2 1.25 1.30.95
1
1.05
1.1
abs(
Vp)
Phase step response
1 1.05 1.1 1.15 1.2 1.25 1.30
5
10
15
angl
e(Vp
) - d
eg.
Time (sec.)
1 1.05 1.1 1.15 1.2 1.25 1.30.95
1
1.05
1.1
abs(
Vp)
Frequency step response
1 1.05 1.1 1.15 1.2 1.25 1.30
0.5
1
angl
e(Vp
) - d
eg.
1 1.05 1.1 1.15 1.2 1.25 1.30
0.01
0.02
del f
(Hz)
Time (sec.)
• MA Filter = Box car, 1/30 sec.• fS1 = 32*60 Hz• Band-pass anti-aliasing filter• Cheby 2 post-processing filter
• At f = 36 Hz, A = 26 dB• 3rd order

17
Example 2A(fS2 = 60 Hz)
• MA Filter = Box car, 1/60 sec.• fS1 = 32*60 Hz• No anti-aliasing filter• No post-processing filter
10-1
100
101
102
103
-60
-40
-20
0
Gai
n (d
B)
Phasor signal
10-1
100
101
102
103
-100
-80
-60
-40
-20
0
Frequency (Hz)
Phas
e (d
eg.)
0 50 100 150 200
-60
-40
-20
0
Gai
n (d
B)
Phasor signal
0 50 100 150 200-200
-100
0
100
200
Frequency (Hz)
Phas
e (d
eg.)

18
Example 2A
• MA Filter = Box car, 1/60 sec.• fS1 = 32*60 Hz• No anti-aliasing filter• No post-processing filter
1 1.05 1.1 1.15 1.2 1.25 1.31
1.05
1.1
1.15
abs(
Vp)
Amplitude step response
1 1.05 1.1 1.15 1.2 1.25 1.3-5
0
5
10
angl
e(Vp
) - d
eg.
Time (sec.)
1 1.05 1.1 1.15 1.2 1.25 1.30.95
1
1.05
1.1
abs(
Vp)
Phase step response
1 1.05 1.1 1.15 1.2 1.25 1.30
5
10
15
angl
e(Vp
) - d
eg.
Time (sec.)
1 1.05 1.1 1.15 1.2 1.25 1.30.95
1
1.05
1.1
abs(
Vp)
Frequency step response
1 1.05 1.1 1.15 1.2 1.25 1.30
0.5
1
angl
e(Vp
) - d
eg.
1 1.05 1.1 1.15 1.2 1.25 1.30
0.01
0.02
del f
(Hz)
Time (sec.)

19
Example 2B(fS2 = 60 Hz)
• MA Filter = Box car, 1/60 sec.• fS1 = 32*60 Hz• No anti-aliasing filter• No post-processing filter
10-1
100
101
102
103
-60
-40
-20
0
Gai
n (d
B)
Phasor signal
10-1
100
101
102
103
-100
-80
-60
-40
-20
0
Frequency (Hz)
Phas
e (d
eg.)
• MA Filter = Box car, 1/60 sec.• fS1 = 32*60 Hz• Band-pass anti-aliasing filter• No post-processing filter
10-1
100
101
102
103
-60
-40
-20
0
Gai
n (d
B)
Phasor signal
10-1
100
101
102
103
-100
-80
-60
-40
-20
0
Frequency (Hz)
Phas
e (d
eg.)

20
Example 2B(fS2 = 60 Hz)
• MA Filter = Box car, 1/60 sec.• fS1 = 32*60 Hz• Band-pass anti-aliasing filter• No post-processing filter
1 1.05 1.1 1.15 1.2 1.25 1.31
1.05
1.1
1.15
abs(
Vp)
Amplitude step response
1 1.05 1.1 1.15 1.2 1.25 1.3-5
0
5
10
angl
e(Vp
) - d
eg.
Time (sec.)
1 1.05 1.1 1.15 1.2 1.25 1.30.95
1
1.05
1.1
abs(
Vp)
Phase step response
1 1.05 1.1 1.15 1.2 1.25 1.30
5
10
15
angl
e(Vp
) - d
eg.
Time (sec.)
1 1.05 1.1 1.15 1.2 1.25 1.30.95
1
1.05
1.1
abs(
Vp)
Frequency step response
1 1.05 1.1 1.15 1.2 1.25 1.30
0.5
1
angl
e(Vp
) - d
eg.
1 1.05 1.1 1.15 1.2 1.25 1.30
0.01
0.02
del f
(Hz)
Time (sec.)

10-1
100
101
102
103
-60
-40
-20
0
Gai
n (d
B)
Phasor signal
10-1
100
101
102
103
-100
-80
-60
-40
-20
0
Frequency (Hz)
Phas
e (d
eg.)
21
10-1
100
101
102
103
-60
-40
-20
0
Gai
n (d
B)
Phasor signal
10-1
100
101
102
103
-100
-80
-60
-40
-20
0
Frequency (Hz)
Phas
e (d
eg.)
Example 2C(fS2 = 60 Hz)
• MA Filter = Box car, 1/60 sec.• fS1 = 32*60 Hz• Band-pass anti-aliasing filter• Cheby 2 post-processing filter
• Cheby2, f = 30 Hz, A = 33 dB• 4th order
• MA Filter = Box car, 1/60 sec.• fS1 = 32*60 Hz• Band-pass anti-aliasing filter• No post-processing filter

22
Example 2C1 1.05 1.1 1.15 1.2 1.25 1.3
1
1.05
1.1
1.15
abs(
Vp)
Amplitude step response
1 1.05 1.1 1.15 1.2 1.25 1.3-5
0
5
10
angl
e(Vp
) - d
eg.
Time (sec.)
1 1.05 1.1 1.15 1.2 1.25 1.30.95
1
1.05
1.1
abs(
Vp)
Phase step response
1 1.05 1.1 1.15 1.2 1.25 1.30
5
10
15
angl
e(Vp
) - d
eg.
Time (sec.)
1 1.05 1.1 1.15 1.2 1.25 1.30.95
1
1.05
1.1
abs(
Vp)
Frequency step response
1 1.05 1.1 1.15 1.2 1.25 1.30
0.5
1
angl
e(Vp
) - d
eg.
1 1.05 1.1 1.15 1.2 1.25 1.30
0.01
0.02
del f
(Hz)
Time (sec.)
• MA Filter = Box car, 1/60 sec.• fS1 = 32*60 Hz• Band-pass anti-aliasing filter• Cheby 2 post-processing filter
• Cheby2, f = 30 Hz, A = 33 dB• 4th order

23
10-1
100
101
102
103
-60
-40
-20
0
Gai
n (d
B)
Phasor signal
10-1
100
101
102
103
-100
-80
-60
-40
-20
0
Frequency (Hz)
Phas
e (d
eg.)
Example 2D(fS2 = 120 Hz)
• MA Filter = Box car, 1/60 sec.• fS1 = 32*60 Hz• Band-pass anti-aliasing filter• Cheby 2 post-processing filter
• Cheby2, f = 60 Hz, A = 33 dB• 4th order

24
Example 2D1 1.05 1.1 1.15 1.2 1.25 1.3
1
1.05
1.1
1.15
abs(
Vp)
Amplitude step response
1 1.05 1.1 1.15 1.2 1.25 1.3-5
0
5
10
angl
e(Vp
) - d
eg.
Time (sec.)
1 1.05 1.1 1.15 1.2 1.25 1.30.95
1
1.05
1.1
abs(
Vp)
Phase step response
1 1.05 1.1 1.15 1.2 1.25 1.30
5
10
15
angl
e(Vp
) - d
eg.
Time (sec.)
1 1.05 1.1 1.15 1.2 1.25 1.30.95
1
1.05
1.1
abs(
Vp)
Frequency step response
1 1.05 1.1 1.15 1.2 1.25 1.30
0.5
1
angl
e(Vp
) - d
eg.
1 1.05 1.1 1.15 1.2 1.25 1.30
0.01
0.02
del f
(Hz)
Time (sec.)
• MA Filter = Box car, 1/60 sec.• fS1 = 32*60 Hz• Band-pass anti-aliasing filter• Cheby 2 post-processing filter
• Cheby2, f = 60 Hz, A = 33 dB• 4th order

Requirements Summary• Gain
– REQUIRED: The gain does not exceed -40 dB at frequencies above the Nyquist frequency continuing to infinity.
– REQUIRED: The gain does not exceed -60 dB at frequencies that are harmonics of 60 Hz. The notch at 60 Hz is 2 Hz with linearly increasing notches for higher harmonics.
– REQUIRED: The pass band gain has no ripple and is within 0.5 dB out to 1.5 Hz.– REQUIRED: The corner frequency (-3 dB) must be greater than or equal to 5 Hz.
• Phase– REQUIRED: The phase start 0° at DC. – REQUIRED: The phase must be bound by +20° for all frequencies less than or equal to 2
Hz.– DESIRED: The phase is as linear as possible in the pass band.
• Step Response– REQUIRED: The 90% rise time occurs within 50 msec.– DESIRED: The percent overshoot does not exceed 10%.– REQUIRED: The 2% settling time is less than or equal to 3Tp.
25