
Overview: two parts to this presentation Physics-Derived Basis Pursuit for Buried Object...
36
Overview: two parts to this presentation •Physics-Derived Basis Pursuit for Buried Object Identification •Fast 3D Blind Deconvolution of Even Point Spread Functions •Andrew E. Yagle, January 2005
-
date post
19-Dec-2015 -
Category
Documents
-
view
213 -
download
0
Transcript of Overview: two parts to this presentation Physics-Derived Basis Pursuit for Buried Object...

Overview: two parts to this presentation
• Physics-Derived Basis Pursuitfor Buried Object Identification
• Fast 3D Blind Deconvolution of Even Point Spread Functions
• Andrew E. Yagle, January 2005

VoltageResponse
BuriedObject
MetalDetectorCoil
Physics DerivedBasis Pursuit
in Buried ObjectIdentification
Springfield, VA, January 2005
Jay A. Marble and Andrew E. Yagle
Part I of thisPresentation

Air
Ground
Primary Magnetic Field
SecondaryMagnetic
Field
Air
Ground
Source InducedSources
Vertical Dipole
Horizontal Dipole
Transmitted Fields Fields at Buried Object
Buried ObjectResponse
Induced Sources(approximation)
Metal DetectorPhenomenology
Coil
• An Electromagnetic Induction (EMI) Metal Detector utilizes a coil of wire to generate a magnetic field.
• This magnetic field interacts with a buried object inducing “swirling” electrical (eddy) currents. These induced currents form secondary sources, which can be modeled as vertical and horizontal dipoles.
• The metal detector coil is then switched from a transmitter to a receiver.
+-
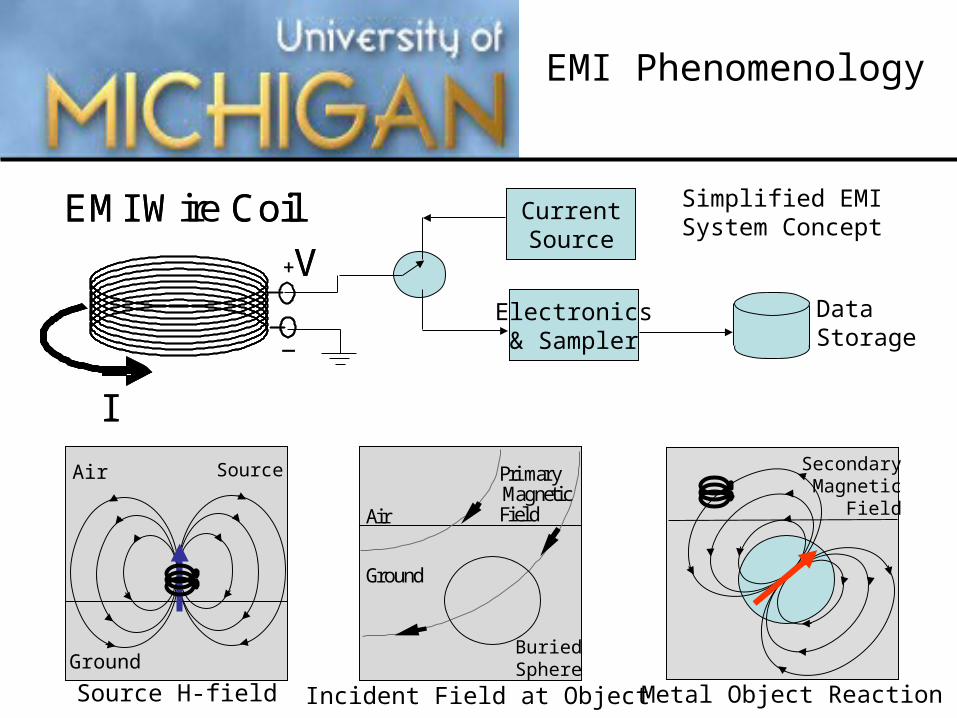
EMI Phenomenology
Air
Ground
Primary MagneticField
BuriedSphere
CurrentSource
Electronics& Sampler
DataStorage
I
V+
_
EMI Wire Coil
I
V+
_
EMI Wire Coil Simplified EMISystem Concept
Air
Ground
Source
SecondaryMagnetic
Field
Source H-field Incident Field at Object Metal Object Reaction

duruJeum
zyxH hd
u
z )(2
),,( 0)(
0 21
30
021
duruJeum
zyxH hd
u
r )(2
),,( 1)(
0 21
210
021
)( 111122
1 ju
)( 222222
2 ju
Air
Ground
Source
Source H-field
(x,y,-d)
(x,y,h)
EMI Phenomenology

),,(),,,(2 03
ssszssz zyxHaPam
),,(),,,(2 03
sssrssr zyxHaPam
))sinh()cosh()(sinh())cosh()(sinh(
))sinh()cosh()(sinh())cosh()(sinh(2),,,(
20
20
s
sss aP
)( ssia
Metal Object Reaction
SecondaryMagnetic
Field
pr
pz
duruJeum
zyxH hz
u
zzz )(
2),,( 0
)(
0 21
321
duruJeum
zyxH hz
u
rrz )(
2),,( 1
)(
0 21
21 21
EMI Phenomenology
* Model assumes a solid spherical target.

zzzzxxzx pHHpHHv 00
InducedMagnetic
Sources
px
pz
* Model no longer assumes a solid spherical target.
H0x – Horizontal magnetic field at the center of the target produced by the source magnetic dipole.
Hxz – Vertical magnetic field at the receive coil produced by the horizontal induced magnetic dipole.
H0z – Vertical magnetic field at the center of the target produced by the source magnetic dipole.
Hzz – Vertical magnetic field at the receive coil produced by the vertical induced magnetic dipole.
z
x
p
p TargetMagneticPolarizabilityVector
EMI Phenomenology

Vertical Dipole Horizontal Dipole
Physics DerivedBasis Functions
-1.5 -1 -0.5 0 0.5 1 1.5
-0.4
-0.2
0
0.2
0.4
0.6
Sample Location [m]
Vol
tage
Res
pons
e
-1.5 -1 -0.5 0 0.5 1 1.5
-0.4
-0.2
0
0.2
0.4
0.6
Sample Location [m]
Vol
tage
Res
pons
e
The Basis Function
TheW Basis Function
• The vertical dipole produces the basis.
• The horizontal dipole produces the W basis.

)()( xbWxaxs dd
Physics DerivedBasis Functions
d – depth of buried object
a – Polarizability of object in Z-direction.
b – Polarizability of object in X-direction.
• The spatial signal is composed of the (x) and W(x) basis functions.
• The basis functions are parameterized by depth.
• Any object at the same depth will have the same basis.
• The object’s shape affects the weighting coeffs “a” and “b”.

Sphere at 0.0m
All objects simulated at 0.25m depth.
• These 3 signals come from identical spheres at different depths.
Canonical Depths
-1.5 -1 -0.5 0 0.5 1 1.5-1
-0.5
0
0.5
1
1.5x 10
-3
Sample Location [m]
Vol
tage
Res
pons
e
Sphere at 1.0m
Sphere at 0.25m Sphere at 1.0m
-1.5 -1 -0.5 0 0.5 1 1.5-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
Sample Location [m]
Vol
tage
Res
pons
e
Sphere at 0.25m
-1.5 -1 -0.5 0 0.5 1 1.5-4
-2
0
2
4
6
8
Sample Location [m]
Vol
tage
Res
pons
e
Sphere at 0.0m

Canonical Depths
-1.5 -1 -0.5 0 0.5 1 1.5-2
-1
0
1
2
3
4
5
Sample Location [m]
Vol
tage
Res
pons
e
Sphere at 0.0m
a Component
bW Component-1.5 -1 -0.5 0 0.5 1 1.5
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
Sample Location [m]
Vol
tage
Res
pons
e
Sphere at 0.25m
a Component
bW Component-1.5 -1 -0.5 0 0.5 1 1.5
-2
-1
0
1
2
3
4
5
6
x 10-4
Sample Location [m]V
olta
ge R
espo
nse
Sphere at 1.0m
a Component
bW Component
Sphere at 0.0m
• These 3 signals come from identical spheres at different depths.
Sphere at 0.25m Sphere at 1.0m

d
Wd
2D SignalSubspace
HigherDimensional
Space
2D PlaneSpanned byd and Wd
• The natural d and Wd bases are non-orthogonal. • An interesting fact is that thed and Wd bases form an angle of 62° regardless of object depth d.
• All metal objects at this depth will exist in this signal subspace.
d
Wd
62°

Subspaces for Objects at
Different Depths
• The bases of objects at a second depth, d2 and Wd2, span a second plane that is non-orthogonal to the plane spanned by the first depth bases, d1 and Wd1.
d1
Wd1
d2
Wd2
First Depth Subspace
SecondDepthSubspace

Sphere Cylinder Flat Plate
-1.5 -1 -0.5 0 0.5 1 1.5
-0.4
-0.2
0
0.2
0.4
0.6
Sample Location [m]V
olta
ge R
espo
nse
Flat Plate
-1.5 -1 -0.5 0 0.5 1 1.5
-0.4
-0.2
0
0.2
0.4
0.6
Sample Location [m]
Vol
tage
Res
pons
e
Cylinder
-1.5 -1 -0.5 0 0.5 1 1.5
-0.4
-0.2
0
0.2
0.4
0.6
Sample Location [m]
Vol
tage
Res
pons
e
Sphere
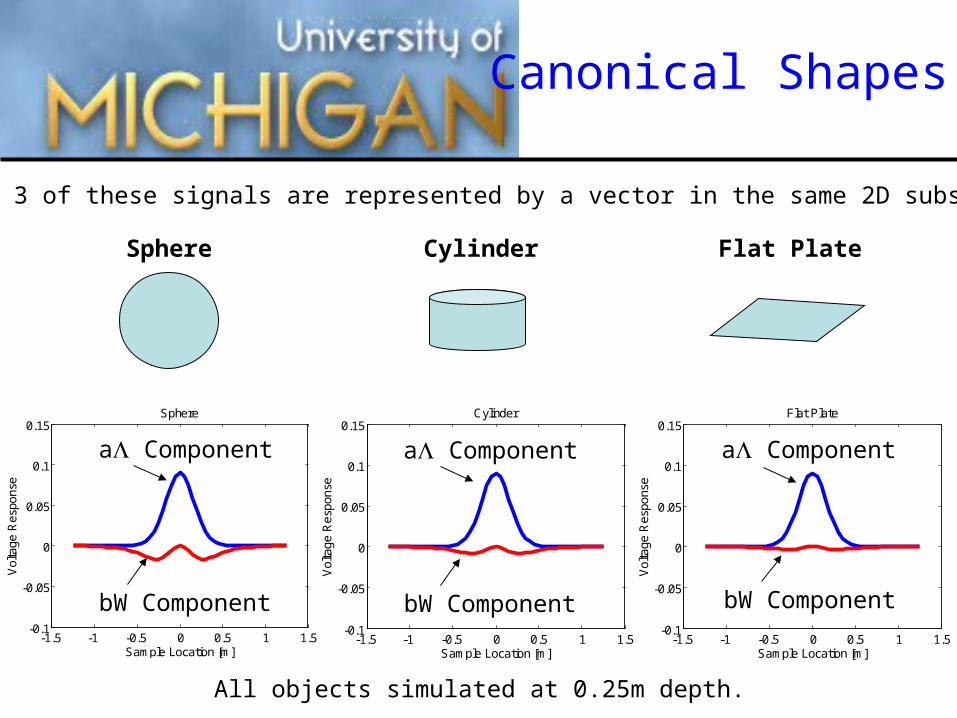
All objects simulated at 0.25m depth.
• All 3 of these signals are represented by a vector in the same 2D subspace.
Canonical Shapes
Sphere Cylinder Flat Plate
All objects simulated at 0.25m depth.
• All 3 of these signals are represented by a vector in the same 2D subspace.
Canonical Shapes
-1.5 -1 -0.5 0 0.5 1 1.5-0.1
-0.05
0
0.05
0.1
0.15
Sample Location [m]
Vol
tage
Res
pons
e
Sphere
-1.5 -1 -0.5 0 0.5 1 1.5-0.1
-0.05
0
0.05
0.1
0.15
Sample Location [m]
Vol
tage
Res
pons
e
Cylinder
-1.5 -1 -0.5 0 0.5 1 1.5-0.1
-0.05
0
0.05
0.1
0.15
Sample Location [m]V
olta
ge R
espo
nse
Flat Plate
a Component a Component a Component
bW Component bW Component bW Component

Effect of Object Shape, Size, and Content
d
Wd
62°
45°-Sphere
30°-Cylinder
10°-Flat Plate
Larger or MoreConductive Sphere
Larger or MoreConductive Cylinder
Larger or MoreConductive Flat Plate
a b angle
sphere 1 1 45°
cylinder 1 0.5 30°
flat plate 1 0.176 10°
2D Subspace forObjects at Depth “d”
• The object’s polarizability (the a and b coeffs) determines the angle of the signal in the 2D subspace.
• Increasing the object’s size increases the weightings, a and b.
• More conductive metal also increases the weightings, a and b.
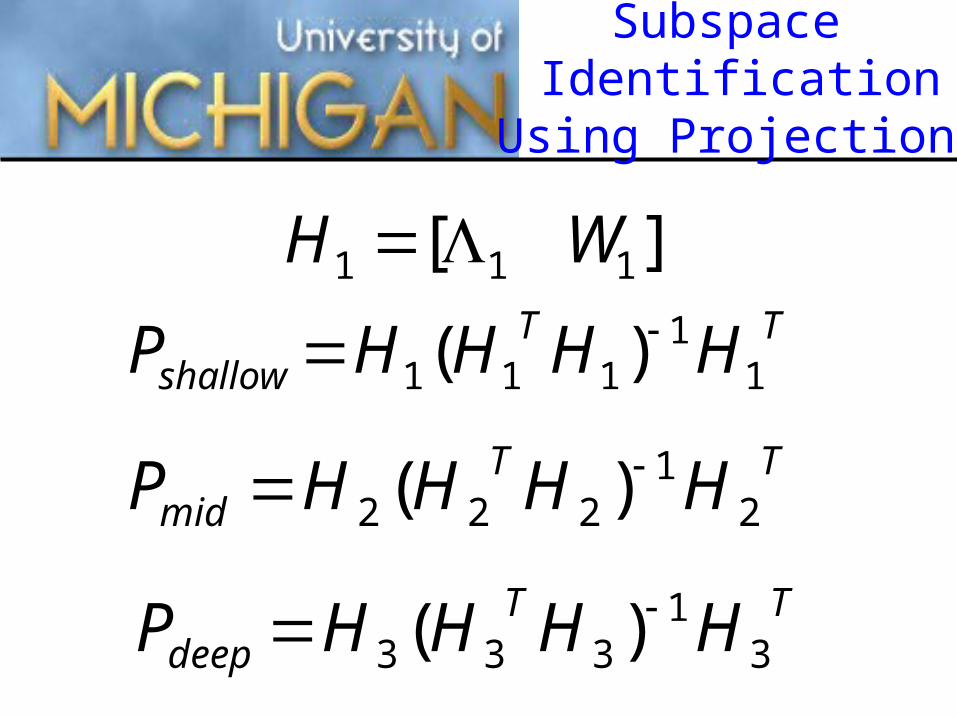
TTshallow HHHHP 1
1111 )(
][ 111 WH
TTmid HHHHP 2
1222 )(
TTdeep HHHHP 3
1333 )(
Subspace Identification
Using Projections

-1.5 -1 -0.5 0 0.5 1 1.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
-1.5 -1 -0.5 0 0.5 1 1.5-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
-1.5 -1 -0.5 0 0.5 1 1.5-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
DeepSphere
DeepSphere
DeepSphere
Subspace IdentificationPerformance
Table 3a: Norm After Projection into Subspace (No Noise)
Spheres Flat Plates Cylinders
Shallow Mid Deep Shallow Mid Deep Shallow Mid Deep
Shallow 1.00 0.80 0.79 1.00 0.99 0.93 1.00 0.95 0.94
Mid 0.69 1.00 0.79 0.92 1.00 0.99 0.81 1.00 0.96
Deep 0.31 0.51 1.00 0.63 0.85 1.00 0.35 0.71 1.00
Table 3b: Norm After Projection into Subspace (Noise Var: 0.01)
Spheres Flat Plates Cylinders
Shallow Mid Deep Shallow Mid Deep Shallow Mid Deep
Shallow 0.98 0.75 0.73 0.98 0.97 0.92 0.99 0.93 0.92
Mid 0.66 0.97 0.71 0.92 0.98 0.97 0.84 0.98 0.94
Deep 0.32 0.54 0.93 0.64 0.83 0.98 0.38 0.72 0.96
Table 3c: Norm After Projection into Subspace (Noise Var: 0.05)
Spheres Flat Plates Cylinders
Shallow Mid Deep Shallow Mid Deep Shallow Mid Deep
Shallow 0.70 0.49 0.39 0.84 0.81 0.58 0.73 0.68 0.57
Mid 0.41 0.59 0.39 0.79 0.80 0.62 0.64 0.71 0.55
Deep 0.04 0.39 0.44 0.58 0.67 0.65 0.28 0.30 0.55
-1.5 -1 -0.5 0 0.5 1 1.5-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
-1.5 -1 -0.5 0 0.5 1 1.5-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
-1.5 -1 -0.5 0 0.5 1 1.5-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
MidDepthSphere
MidDepthSphere
MidDepthSphere

600Hz to 60kHz
New EMIModality
Georgia Tech EMI
-1.5 -1 -0.5 0 0.5 1 1.5-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Sample Location [m]
Vol
tage
Res
pons
e
1kHzrealimag*10
-1.5 -1 -0.5 0 0.5 1 1.5-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Sample Location [m]
Vol
tage
Res
pons
e
10kHzrealimag*10
-1.5 -1 -0.5 0 0.5 1 1.5-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Sample Location [m]
Vol
tage
Res
pons
e
20kHzrealimag*10
-1.5 -1 -0.5 0 0.5 1 1.5-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Sample Location [m]
Vol
tage
Res
pons
e
30kHzrealimag*10
-1.5 -1 -0.5 0 0.5 1 1.5-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Sample Location [m]
Vol
tage
Res
pons
e
40kHzrealimag*10
-1.5 -1 -0.5 0 0.5 1 1.5-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Sample Location [m]
Vol
tage
Res
pons
e
50kHzrealimag*10
-1.5 -1 -0.5 0 0.5 1 1.5-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Sample Location [m]
Vol
tage
Res
pons
e
60kHzrealimag*10

Fast 3D Blind Deconvolution of Even Point Spread Functions
Andrew Yagle and Siddharth ShahThe University of Michigan, Ann Arbor
Part II of thisPresentation

Motivation
Many blind deconvolutionalgorithms need an initial PSF estimate
Can be tedious and problematic to measure PSF accurately
Blind Deconvolution(Don’t need PSF)BUT
But Blind Deconvolution algorithms tend to be slow !Also many still need initial PSF estimate
What we need
A fast algorithm that performs blind deconvolution

We will show:
An algorithm that performs blind deconvolution that is
• Fast
• Parallelizable
• A linear algebraic formulation
• Non iterative (at least for the Least Squares solution)

Assumptions
1. Point Spread Function or
PSF h(x,y,z) is even in 3-D.Reasonable in optics. PSFsare symmetric in x, y, and z.Hence h(x,y,z) = h(-x,-y,-z)
2. We know the PSF or image support size.
3. Image has compact support.
Potential Problem: Asymmetric PSFs due to optical aberrations
Can these be solved too ? YES (later)

Formulation
y(i1,i2,i3) = h(i1,i2,i3) *** u(i1,i2,i3) + n(i1,i2,i3)
DATA PSF OBJECT NOISE
where u(i1,i2,i3) ≠ 0 for 0 ≤ i1,i2,i3 ≤ M-1 h(i1,i2,i3) ≠ 0 for 0 ≤ i1,i2,i3 ≤ L-1 y(i1,i2,i3) ≠ 0 for 0 ≤ i1,i2,i3 ≤ N-1 N=L+M-1
h(i1,i2,i3) = h(L-i1,L-i2,L-i3) (even PSF)n(i1,i2,i3) is zero mean white Gaussian noise.
PROBLEMGiven only data y(i1,i2,i3) reconstruct the object u(i1,i2,i3)and the PSF h(i1,i2,i3)

1-D Solution
)()1
()1
()(
)()1
()()()(
transformz Taking
even is ),()()(
1 zUz
Yzz
UzzY
zUz
HzzUzHzY
h(n)nunhny
NM
L
Equating coefficients, we get the following matrix
0
0
)1(
)0(
)0(
)1(
)0(*00)1(0
)1(*)2(
)2(*)1(
00)1(*00)0(
Mu
u
u
Mu
yNy
yNy
Nyy
Nyy
Toeplitz Structure
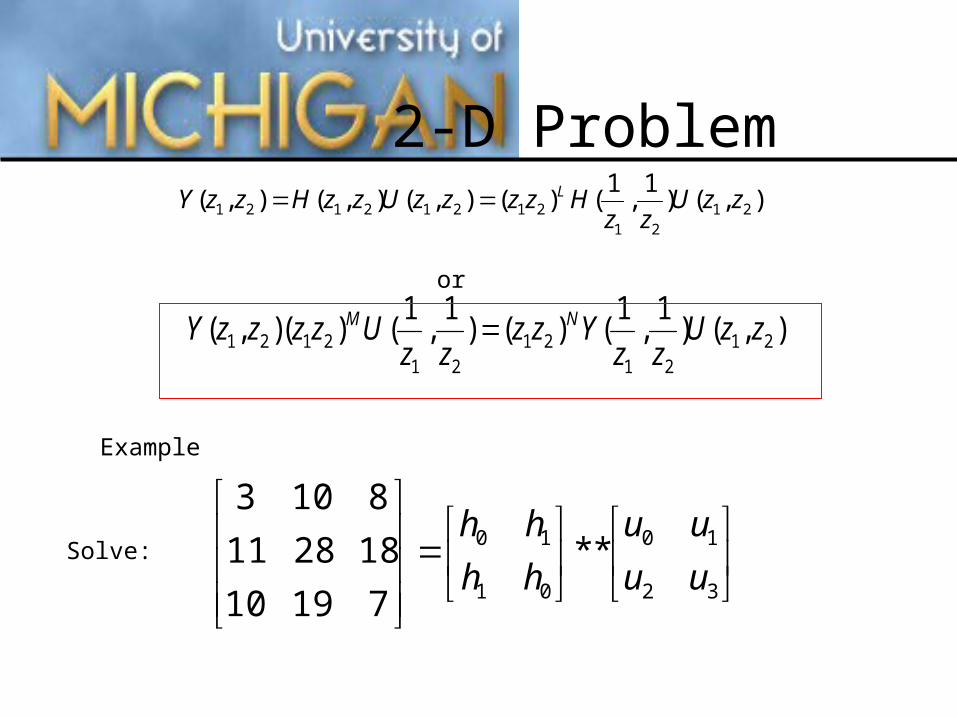
2-D Problem
),()1
,1
()(),(),(),( 2121
21212121 zzUzz
HzzzzUzzHzzY L
),()1
,1
()()1
,1
()(),( 2121
2121
2121 zzUzz
Yzzzz
UzzzzY NM
or
Example
Solve:
32
10
01
10 **
71910
182811
8103
uu
uu
hh
hh

2-D Example
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
100008000
11100018800
3110071800
03000700
19010010080
281911102810188
10283111928718
0100301907
7019030100
18728191132810
818102810111928
08010010019
00700030
0018700113
00818001011
000800010
1
3
0
2
2
0
3
1
u
u
u
u
u
u
u
u
Solution
75
43
32
10
uu
uu
Toeplitz Block Toeplitz structure
Size of matrix(2M + L- 2)2 X (2M2)

3-D Solution
),,()1
,1
,1
()()1
,1
,1
()(),,( 321321
321321
321321 zzzUzzz
Yzzzzzz
UzzzzzzY NM
Equating coefficients we would get a doubly nested Toeplitz matrix
Matrix size: (2M + L-2)3 X (2M)3
Q: So we have solved the 3D problem ?A: Not quite !! If M=5 and L=3 then the matrix size is 4913 X1024
It will be intractable to use this method “as is” in 3D !
FourierDecomposition
)1
,1
,1
())(,,()1
,1
,1
())(,,(
Then
,,Let
313131
313131
/2/2/2
zyzYzyzzyzU
zyzUzyzzyzY
ezeyex
k
Nkk
k
Mkk
Mkjk
Mkjk
Mkjk
)*
1,,
*
1())(,,()
*
1,,
*
1(*))(,,(
313131
313131 z
yz
YzyzzyzUz
yz
UzyzzyzY kN
kkkM
kk
Using conjugate symmetry )*
1,,
*
1(*)
*
1,
*
1,
*
1(*)
1,
1,
1(
313131 zy
zU
zyzU
zyzU k
kk
The point ?
The last equation is decoupled into a set of M 2D problems !
0 ≤ k ≤ M-1

2-D to 1-D
So we broke down a huge 3D problem to M simpler 2D problems
What next ?
Substitute for xk in each 2D problem and you would get M 1D problems in z
To summarize
We broke up a large 3D problem into M2 1D problems
)*
1,,())(,,()
*
1,,(*))(,,(
333
333 z
yxYzyxzyxUz
yxUzyxzyxY kkN
kkkkkkM
kkkk
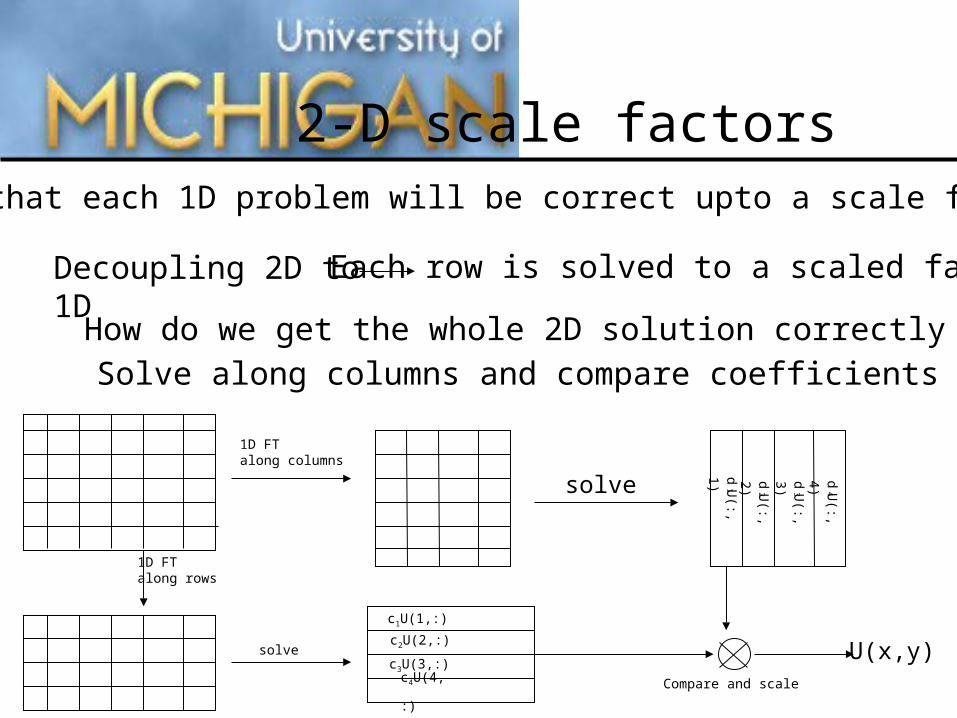
2-D scale factors
Note that each 1D problem will be correct upto a scale factor.
Decoupling 2D to 1D Each row is solved to a scaled factor.
How do we get the whole 2D solution correctly ?
Solve along columns and compare coefficients
1D FTalong columns
1D FTalong rows
solve
c1U(1,:) c2U(2,:) c3U(3,:) c4U(4,:)
solve d1U
(:,1) d
2U(:,
2) d3U
(:,3)
d4U
(:,4)
Compare and scale
U(x,y)

3-D scale factors
We just learned how a 2D problem could be correctly scaled
Decouple 3D to 2DSolve 3D Decouple 2D to 1D Solve 1D
Scale 1D SolnsScale 2D Solns 2D solutions
c1
c2
d1 d2
U(x,y,z)Decouple along z
Solve 2D problems
Solve 2D problems
Decouple along x
Compareand scale
2D problems
Stochastic Case
In presence of noise the nullspace of the toeplitz structure no longer exists.
We can find “nearest” nullspace using Least Squares (LS) (fast)
Can use structure of matrix to solve by structured least squares (STLS)(slow but more accurate)
We can show that such norm minimization will give us the Maximum Likelihood Estimate of the object u(x,y,z)

Simulations
Synthetic bead image (30X30X30), (3X3X3) PSF, no noise

Stochastic case: STLN vs. LS
Least Squares v/s STLN comparison
Least squares does well at highSNRs but at low and mediumSNRS STLN is better.
7X7X7 image. 3X3X3 PSF. 50 iterations per SNR

Comparison with Lucy Richardson
SNR SNR
MSETime
Our algorithm gave a lower MSE. In LRFinal accuracy even in absence of noisedepends on initial PSF estimate.
Our algorithm need only a fixed amountof time to solve independent of the SNR.LR needs more time and time to solve depends on the SNR.















![Blind Deconvolution of Widefield Fluorescence Microscopic ... · eral deconvolution methods in widefield microscopy. In [3] several nonlinear deconvolution methods as the Lucy-Richardson](https://static.fdocuments.net/doc/165x107/5f6dfa53e2931769252d0293/blind-deconvolution-of-widefield-fluorescence-microscopic-eral-deconvolution.jpg)
