Output synchronization control of ship replenishment operations: Theory and experiments · 2007....
15
Control Engineering Practice 15 (2007) 741–755 Output synchronization control of ship replenishment operations: Theory and experiments Erik Kyrkjebø a, , Kristin Y. Pettersen a , Michiel Wondergem b , Henk Nijmeijer b a Department of Engineering Cybernetics, Norwegian University of Science and Technology, O. S. Bragstad Plass 2D, NO-7491 Trondheim, Norway b Department of Mechanical Engineering, Eindhoven University of Technology, P.O. Box 513, 5600 MB Eindhoven, The Netherlands Received 11 April 2005; accepted 4 July 2006 Available online 6 September 2006 Abstract A leader–follower synchronization output feedback control scheme is presented for the ship replenishment problem where only positions are measured. No mathematical model of the leader ship is required, and the control scheme relies on nonlinear observers to estimate velocity and acceleration of all ships to realize the feedback control law. The scheme yields semi-global uniform ultimate boundedness of the closed-loop errors. The bound is a function of the main ship acceleration, and under the assumption of zero main ship acceleration the closed-loop errors are semi-globally exponentially converging. The results are verified through experiments on a model-scale ship. r 2006 Elsevier Ltd. All rights reserved. Keywords: Output feedback; Synchronization; Nonlinear control; Ship control; Observers; Coordination 1. Introduction Underway replenishment (UNREP) operations to ex- change fuel, food, parts or personnel are common in space, aerospace and marine operations. These rendezvous operations are essential in situations where it is impractical or impossible to return to base to replenish storage or personnel due to mission requirements. In particular, UNREP operations at sea are essential for long-term military operations to shorten or avoid port time. A control scheme for the ship replenishment problem is proposed using synchronization theory to coordinate the motion of the supply and replenished ship in a leader–fol- lower configuration using only position measurements. The control scheme does not assume knowledge of predefined trajectories or a mathematical model of the replenished ship, and only the supply ship is responsible for control action to synchronize the two ships. This may facilitate civilian UNREP operations, and furthermore improve the performance of existing UNREP operations by introducing automatic controllers to inherently cancel any disturbances affecting the two ships differently. The replenishment problem dates back to the early days of sail, when the sailing ships were replenished at anchor by boats rowing out supplies from storages onshore, or exchanging personnel and mail by ship’s boats at sea. During the US Quasi-War with France (1799–1801) (see Hill, 1989), the US Navy used civil merchant ships to replenish their ships protecting their trade interests in the Caribbean. The merchant ships were taken under tow, and the ships were replenished using ship’s boats. The introduction of the mechanized fleet introduced a new limited resource to the ships, and from this emerged the operations of coaling-at-sea and refuelling-at-sea. The former was usually conducted by bringing merchant colliers alongside the ships and lashing the ships together using fenders and mooring lines to transfer the coal using booms on the collier. This approach was particularly vulnerable to weather conditions, and this led to the development of a tension rig in 1904 designed to transfer the coal in bags. Poor operation and the introduction of fuel oil stopped further developments, and from this point the refuelling-at-sea operation required that the ships were ARTICLE IN PRESS www.elsevier.com/locate/conengprac 0967-0661/$ - see front matter r 2006 Elsevier Ltd. All rights reserved. doi:10.1016/j.conengprac.2006.07.001 Corresponding author. Tel.: +47 735 91277; fax: +47 93 17 71 30. E-mail address: [email protected] (E. Kyrkjebø).
Transcript of Output synchronization control of ship replenishment operations: Theory and experiments · 2007....
-
ARTICLE IN PRESS
0967-0661/$ - se
doi:10.1016/j.co
�CorrespondE-mail addr
Control Engineering Practice 15 (2007) 741–755
www.elsevier.com/locate/conengprac
Output synchronization control of ship replenishment operations:Theory and experiments
Erik Kyrkjebøa,�, Kristin Y. Pettersena, Michiel Wondergemb, Henk Nijmeijerb
aDepartment of Engineering Cybernetics, Norwegian University of Science and Technology, O. S. Bragstad Plass 2D, NO-7491 Trondheim, NorwaybDepartment of Mechanical Engineering, Eindhoven University of Technology, P.O. Box 513, 5600 MB Eindhoven, The Netherlands
Received 11 April 2005; accepted 4 July 2006
Available online 6 September 2006
Abstract
A leader–follower synchronization output feedback control scheme is presented for the ship replenishment problem where only
positions are measured. No mathematical model of the leader ship is required, and the control scheme relies on nonlinear observers to
estimate velocity and acceleration of all ships to realize the feedback control law. The scheme yields semi-global uniform ultimate
boundedness of the closed-loop errors. The bound is a function of the main ship acceleration, and under the assumption of zero main
ship acceleration the closed-loop errors are semi-globally exponentially converging. The results are verified through experiments on a
model-scale ship.
r 2006 Elsevier Ltd. All rights reserved.
Keywords: Output feedback; Synchronization; Nonlinear control; Ship control; Observers; Coordination
1. Introduction
Underway replenishment (UNREP) operations to ex-change fuel, food, parts or personnel are common in space,aerospace and marine operations. These rendezvousoperations are essential in situations where it is impracticalor impossible to return to base to replenish storage orpersonnel due to mission requirements. In particular,UNREP operations at sea are essential for long-termmilitary operations to shorten or avoid port time. Acontrol scheme for the ship replenishment problem isproposed using synchronization theory to coordinate themotion of the supply and replenished ship in a leader–fol-lower configuration using only position measurements. Thecontrol scheme does not assume knowledge of predefinedtrajectories or a mathematical model of the replenishedship, and only the supply ship is responsible for controlaction to synchronize the two ships. This may facilitatecivilian UNREP operations, and furthermore improve theperformance of existing UNREP operations by introducing
e front matter r 2006 Elsevier Ltd. All rights reserved.
nengprac.2006.07.001
ing author. Tel.: +47735 91277; fax: +47 93 17 71 30.
ess: [email protected] (E. Kyrkjebø).
automatic controllers to inherently cancel any disturbancesaffecting the two ships differently.The replenishment problem dates back to the early days
of sail, when the sailing ships were replenished at anchor byboats rowing out supplies from storages onshore, orexchanging personnel and mail by ship’s boats at sea.During the US Quasi-War with France (1799–1801) (seeHill, 1989), the US Navy used civil merchant ships toreplenish their ships protecting their trade interests in theCaribbean. The merchant ships were taken under tow, andthe ships were replenished using ship’s boats. Theintroduction of the mechanized fleet introduced a newlimited resource to the ships, and from this emerged theoperations of coaling-at-sea and refuelling-at-sea. Theformer was usually conducted by bringing merchantcolliers alongside the ships and lashing the ships togetherusing fenders and mooring lines to transfer the coal usingbooms on the collier. This approach was particularlyvulnerable to weather conditions, and this led to thedevelopment of a tension rig in 1904 designed to transferthe coal in bags. Poor operation and the introduction offuel oil stopped further developments, and from this pointthe refuelling-at-sea operation required that the ships were
www.elsevier.com/locate/conengpracdx.doi.org/10.1016/j.conengprac.2006.07.001mailto:[email protected]
-
ARTICLE IN PRESSE. Kyrkjebø et al. / Control Engineering Practice 15 (2007) 741–755742
specially equipped for the operation. A new multi-productUNREP system providing UNREP for a broader set ofweather conditions was introduced in 1957, when thestandard tensioned replenishment alongside method(STREAM) was based upon the tension rig from 1904.This forms the basis for UNREP operations nowadaysaided by helicopters in vertical replenishment (VERTREP)operations. See Hill (1989) and references therein for athorough review of the history of UNREP, FAS (1999)and NROTC (2003) for an introduction to currentreplenishment techniques, and Miller and Combs (1999)for an evaluation of today’s UNREP systems and thechallenges faced when designing the next generation ofUNREP systems.
The control approaches of ship replenishment have up tonow used flags and signals to communicate controlcommands between ships (FAS, 1999; NROTC, 2003), orsome sort of tracking control of both ships in order tomaintain trajectories that provide joint motion suitable forreplenishment. Some of the earliest references to auto-mated replenishment can be found as simulations studies ofship manoeuvring and steering control for UNREPoperations in Brown and Alvestad (1978) and Dimmick,Alvestad, and Brown (1978), while Uhrin and Thaler(1976) designed a nonlinear speed control system forUNREP operations. Skjetne, Fossen, and Kokotovic(2004) have expanded on traditional tracking methodswith predefined paths, and introduced a feedback from theactual position of a ship (subject to disturbances) to theother ships in a formation through a path parameterizationvariable. All ships have predefined paths with individualtracking controllers requiring mathematical models andcontrol availability, and the ships synchronize in terms ofprogression along the path. Thus, disturbances affectingtracking performance along the path are cancelled, butcross-track errors due to any difference in disturbances arenot. In particular, any two physical systems which are notidentical in their design will experience different impactsfrom environmental forces such as wind, drag, current,terrain or waves. This difference may possibly lead tocritical situations (Chen, 2003) when employing simpletracking controllers to predefined reference paths where thecoordination of the leader and follower is only done at thepath planning stage, and not through active control. Thispaper proposes a leader–follower synchronization outputfeedback scheme to control the supply ship to the motionof the leader ship with only position measurements of theships. The scheme is based on nonlinear state observers toestimate velocity and acceleration for the two ships, andrequires no knowledge of the model of the leader ship. Thescheme does not require any predefined paths, and thusdivergence from an ideal path due to disturbances,unmodelled dynamics, actuator limitations, poor controldesign or actuator failure is inherently cancelled in thesynchronization scheme.
Synchronization is the theory of time conformitybetween processes, which incorporates both cooperating
and coordinated systems. Cooperative synchronization ofmotion regards all synchronized objects on equal terms,while coordinated, or external, synchronization assumesthat one of the systems takes the role of a leader thatgoverns the motion of the others. The synchronizationphenomenon was early reported by Huygens (1673) whoobserved that a pair of pendulum clocks hanging from alightweight beam oscillated with the same frequency. In thelast century, synchronization has received attention in theRussian scientific community where it was observed inbalanced and unbalanced rotors and vibro-exciters (Blekh-man, 1988), and has in the last decade attracted interestfrom researchers within physics, dynamical systems, circuittheory, and more lately control theory (see for instanceBrunt, 1998; Huijberts, Nijmeijer, & Willems, 2000). Acoordinated synchronization scheme applied to robotcontrol was presented in Rodriguez-Angeles and Nijmeijer(2001), and in Nijmeijer and Rodriguez-Angeles (2003)both coordinated and cooperative synchronization schemeswere treated. Based on these results, a synchronizationscheme for ship rendezvous control at sea for UNREPwas presented in Kyrkjebø and Pettersen (2003) withexperimental results in Kyrkjebø, Wondergem, Pettersen,and Nijmeijer (2004) using a coordinated synchronizationscheme.Coordinated control of autonomous marine crafts was
treated in Encarnacao and Pascoal (2001), while controlapproaches for marine rendezvous operations was ad-dressed for unmanned underwater vehicles by Kato andEndo (1989) and White et al. (1996), and for a robotic fishby Kato (2000); the latter two using fuzzy logic theory.Chen (2003) suggested an increased focus on autopilotdesign for replenishment operations to reduce the risk ofcollision. Results on the cognate topic of ship manoeuvringand formation control has also been reported by Skjetne,Ihle, and Fossen (2003).This paper expands the results of Nijmeijer and
Rodriguez-Angeles (2003) on robot control to the syn-chronization of ships with the presence of damping terms.In addition, as opposed to the results on coordinatedcontrol of ships in Encarnacao and Pascoal (2001) andSkjetne et al. (2003), the need for predefined trajectories,full state measurement and access to the mathematicalmodel and control design of the leader is removed. Theleader–follower output synchronization closed-loop errordynamics are shown to be semi-globally ultimatelybounded for ship replenishment, where the bound is afunction of the main ship acceleration during operation.Under the assumption of zero main ship acceleration, theclosed-loop errors are shown to be semi-globally exponen-tially converging.The mathematical model in vectorial form with proper-
ties and some mathematical preliminaries are presented inSection 2. Section 3 presents the synchronization obser-ver–controller scheme with stability addressed in Section 4.Section 5 presents simulations and experimental data fromtests in a model basin, while a discussion of the simulations
-
ARTICLE IN PRESSE. Kyrkjebø et al. / Control Engineering Practice 15 (2007) 741–755 743
and experiments is presented in Section 6. Conclusions andfuture work are presented in Section 7. Two technicalappendices are provided to present the proof of the mainstability result in Appendix A, and a description of thesimulation model in Appendix B.
2. Preliminaries
The general dynamic ship model in vectorial form(Fossen, 2002) can be written
MðZÞ€Zþ CðZ; _ZÞ_ZþDðZ; _ZÞ_Zþ gðZÞ ¼ t. (1)The matrix M is the matrix of inertia and added mass, andD the damping matrix. C is the Coriolis and Centripetalmatrix also including added mass effects, and representedin terms of Christoffel symbols. The vector g representsgravitational/buoyancy forces and moments, while t is thevector of control torques applied to the ship. The vector Zrepresents the earth-fixed position and orientation of theship. For the UNREP control problem, Z is limited to the 3DOF manoeuvring model for surface ships from Fossen(2002) using Z ¼ ½x; y;c� 2 R2 � SOð1Þ.
The dynamic model (1) satisfies the following propertiesfrom Fossen (2002), Paulsen (1996):
P1.
The Coriolis matrix CðZ; _ZÞ 2 Rn�n is defined in termsof Christoffel symbols such that Cðx; yÞz ¼ Cðx; zÞy.P2.
The inertia matrixMðZÞ is positive definite, differentiablein Z and satisfies xTð _MðZÞ � 2CðZ; _ZÞÞx ¼ 0; 8x 2 Rn.Throughout this paper, the minimum and maximumeigenvalue of a positive definite matrix A will be denotedas Am and AM , respectively. The norm of a vector x isdefined as kxk ¼
ffiffiffiffiffiffiffiffixTxp
, and the induced norm of a matrixA is kAk ¼ maxkxk¼1kAxk. Through these definitions, thedynamic model (1) also satisfies
P3.
The norm of CðZ; _ZÞ satisfies kCðZ; _ZÞkpCMk_Zk.
P4.
The inertia matrix satisfy 0oMmpMðZÞpMMo1.The main ship is the replenished ship receiving cargo, whilethe supply ship is the replenishment vessel. The positionand attitude of the main ship is a measured and knownvariable, and will be denoted as Zm. The velocity andacceleration of the main ship are unknown quantitiesdenoted as _Zm and €Zm respectively, and will be estimatedthrough nonlinear observers. The states of the supply shipare similarly denoted as Z, _Z and €Z, where only the positionand attitude vector Z is measured.
3. Synchronization control scheme
This section presents the synchronization control schemewith state observers. The observer–controller schemerequires no knowledge of predefined paths for the ships,and assumes no knowledge of the mathematical model ofthe main ship. Only positions are measured, and the
observer–controller scheme provides semi-global exponen-tially stable closed-loop errors for zero main ship accel-eration, and semi-global uniform ultimate boundedness ofthe closed-loop errors during a replenishment operationwhere the main ship has non-zero acceleration.
3.1. Synchronization objective
The objective is to synchronize a supply ship to theactual position of the main ship, in order to transfer fueland supplies from one ship to the other while the vessels areunderway. The supply ship is said to be synchronized to themain ship if its position/attitude and velocity coincide forall tX0, or asymptotically for t!1. Note that theposition/heading vector Z is synchronized to some constantreference offset Zr to maintain a position alongside themain ship, and the problem is considered as synchronizingZ to Zm by redefining Zm ¼ Ztruem þ RðcÞZr where RðcÞ is arotation matrix describing the orientation of the main ship.Note also that the forward velocity of the follower isdifferent than that of the leader for trajectories with non-zero curvature, and that this is necessary for the follower tomaintain its position parallel to the leader during turns dueto the difference in turn radius.
3.2. State feedback synchronization
Assuming that all values of position/attitude, velocityand acceleration of the supply ship and main ship areavailable for measurement, the following control law givesa stable replenishment control scheme:
t ¼MðZÞ€Zm þ CðZ; _ZÞ_Zm þDðZ; _ZÞ_Zm þ gðZÞ � Kd _e� Kpe,ð2Þ
where the synchronization errors are defined as
e ¼ Z� Zm; _e ¼ _Z� _Zm (3)and Kd ;Kp 2 Rn�n are positive definite gain matrices. Thestability proof of this controller is straightforward usingthe Lyapunov function
V ¼ 12_eTMðZÞ_eþ 1
2eTKpe (4)
and stability theorems such as La Salle’s theorem andBarbalat’s lemma (Khalil, 2002) on the negative semi-definite time derivative
_V ¼ �_eTðDðZ; _ZÞ þ Kd Þ_e. (5)For any positive definite matrices Kp;Kd , and under thereasonable assumption that the damping term satisfiesDðZ; _ZÞ40, the supply ship synchronizes in velocity _Z andposition/attitude Z to the main ship.
3.3. Output feedback synchronization
The control law of (2) cannot be implemented in theoutput synchronization scheme, since only the position andattitude Z and Zm are available as measurements to the
-
ARTICLE IN PRESSE. Kyrkjebø et al. / Control Engineering Practice 15 (2007) 741–755744
controller. The synchronization controller will depend onestimated values for velocities and accelerations fromnonlinear observers as
t ¼MðZÞb€Zm þ CðZ;b_ZÞb_Zm þDðZ;b_ZÞb_Zm þ gðZÞ � Kdb_e� Kpe.ð6Þ
The control law utilizes the dynamic model of the supplyship, depending on the known supply position Z andestimated supply velocity b_Z, and the estimated accelerationb€Zm and velocity b_Zm for the main ship. Additional stabilizingproportional-derivative terms based upon the estimatederror in velocity b_e and the known error in position eprovides convergence and boundedness during replenish-ment. The supply ship uses the observed main ship states asreference states in the controller, and thus physicallysynchronizes itself to the main ship states. In effect, thesupply ship becomes a physical observer of the main shipstates.
Instead of using predefined paths or trajectories for bothships where the tracking performance for the two ships isvulnerable to waves, wind and currents, the reference forthe supply ship is the main ship states. Hence, theperformance of the operation is only dependent on thesupply ship control accuracy, as opposed to the depen-dence of both control system when using predefined paths.
The estimated values for the errors e and _e can beobtained through a full state nonlinear Luenbergerobserver
d
dtbe ¼ b_eþ Ke1ee,
d
dtb_e ¼ �MðZÞ�1½CðZ;b_ZÞb_eþDðZ;b_ZÞb_eþ Kdb_eþ Kpbe� þ Ke2ee,
ð7Þ
where Ke1;Ke2 are positive definite gain matrices, and theestimated position/attitude and velocity synchronizationerrors are defined as
ee ¼ e� be; e_e ¼ _e� b_e. (8)Note that the observers (7) and (8) introduce an extracorrecting term in _ee ¼ e_e� Ke1ee that yields faster perfor-mance during transients, but has some negative effects onnoise sensitivity. Similarly, the estimated supply ship statesare found using the full state nonlinear observer
d
dtbZ ¼ b_Zþ LZ1eZ,
d
dtb_Z ¼ �MðZÞ�1½CðZ;b_ZÞb_eþDðZ;b_ZÞb_eþ Kdb_eþ Kpe� þ LZ2eZ,
ð9Þ
where LZ1;LZ2 are positive definite gain matrices, and theestimated supply ship position/attitude and velocity errorsare defined as
eZ ¼ Z� bZ; e_Z ¼ _Z� b_Z. (10)
The estimated main ship velocity and acceleration valuesb_Zm and b€Zm are not available through direct measurement,and must be reconstructed from the position/attitude anderror estimates. To compensate for the lack of a dynamicmodel, the velocity and acceleration values for the mainship are reconstructed based on information of the supplyship and the synchronization closed-loop system. Estimatesfor Zm; _Zm and €Zm are given asbZm ¼ bZ�be, ð11Þb_Zm ¼ b_Z�b_e, ð12Þb€Zm ¼ ddt ðb_Z�b_eÞ ¼ �ðMðZÞ�1Kp þ Ke2Þeeþ LZ2eZ, ð13Þwhere the last relation stems from (7) and (9).Note that through the definition of the state observer in
(9), the acceleration of the main ship €Zm will be present as anon-vanishing disturbance in the closed-loop error dy-namics resulting from the observer–controller scheme, andthus the origin of the closed-loop error space is no longeran equilibrium. The closed-loop error is therefore at bestultimately bounded by some function of the main shipacceleration €Zm.
4. Stability
This section presents the assumptions under which semi-globally uniformly ultimately boundedness as a function ofthe main ship acceleration can be concluded for the closedloop error dynamics of the synchronization scheme. Theproof of this result is deferred to Appendix A.The following assumption will be made on the damping
term DðZ; _ZÞ_Z of (1) in the stability analysis of this section
A1.
The damping term is linear in velocity _Z such thatDðZ; _ZÞ_Z ¼ DðZÞ_Z.This is an assumption that is always valid for low-speedapplications, and in practice it is difficult to determine thenonlinear damping terms over a wide speed regime. See Fossen(2002) for a discussion on the contribution from linear andnonlinear damping terms for high and low-speed applications.In addition, the following assumptions are made:
A2.
The signals _Zm and €Zm are bounded such thatsuptk_ZmðtÞk ¼ V Mo1, ð14Þ
suptk€ZmðtÞk ¼ AMo1. ð15Þ
The bounds on the velocity and acceleration of the mainship in Assumption 2 can be established based on knowl-edge of a desired trajectory for the main ship duringreplenishment, or by the limitations imposed by themaximum acceleration and velocity given by the propul-sion system. The boundedness assumption of the accelera-tion and velocity thus has a clear physical interpretation inmarine control systems.
-
ARTICLE IN PRESSE. Kyrkjebø et al. / Control Engineering Practice 15 (2007) 741–755 745
To facilitate the stability analysis of the system (1) withthe controller (6) and the observers (7) and (9), additionalassumptions on the gain matrices are made:
A3.
The positive definite observer gain matricesKe1;Ke2;LZ1;LZ2 are chosen asKe1 ¼ LZ1:¼K1; Ke2 ¼ LZ2:¼K2. (16)
A4.
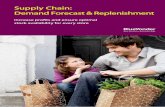
The observer and control gain matrices K1;K2;Kp;Kdare symmetric.Fig. 1. Pictures of Cybership II (left) and basin (right) in MClab, NTNU.
Theorem 1. Consider the ship model (1) under PropertiesP1–P4, the controller (6) and the observers (7) and (9). UnderAssumptions A1–A4 and by choosing the gain matricesK1;K2;Kp;Kd to satisfy a set of lower bounds, the closed-loop errors
xT ¼ ½_eT eT e_eT eeT e_ZT eZT� (17)are semi-globally uniformly ultimately bounded. The bound isa function of the main ship acceleration €Zm. Furthermore,under the assumption of zero main ship acceleration, €Zm ¼ 0,the closed-loop errors of (17) are semi-globally exponentiallyconverging to zero.
The proof of the theorem is divided into two steps byformulating the error dynamics of the closed-loopsystem and then performing the stability analysis on thesystem through a coordinate transformation. A detailedpresentation of the proof of Theorem 1 is given inAppendix A.
5. Simulations and experiments
Simulations and experiments were carried out to verifythe theoretical results of the observer–controller schemepresented in Sections 3 and 4. The experiments wereperformed on a model ship in a closed basin, where theresults are influenced by disturbances and measurementnoise. Simulation results assuming no external disturbancesand no measurement noise serve as an ideal reference, andare compared with the experiments in a back-to-backcomparison to investigate the difference between thetheoretical result and practice. A description of thesimulation model is given in Appendix B. Simulationsand experiments are presented for the case when the mainship acceleration is zero to illustrate the exponentialconvergence of the scheme, and for the practical replen-ishment case when no such assumptions can be made onthe main ship acceleration and the closed-loop errors areultimately bounded.
5.1. Experimental setup
The experiments were carried out on the Froude scaled(1:70) model supply vessel Cybership II at the MCLablaboratory at NTNU (see Fig. 1). The length of the ship is
1.3 m and the weight is 24 kg. The ship is actuatedthrough two rpm-controlled screws with two rudders at thestern, and an rpm-controlled tunnel bow thruster. Themaximum actuated forces are 2N in surge, 1.5N in swayand 1.5Nm in yaw, and the KPL thrust-allocationalgorithm of Lindegaard (2003) is used in the simulationsand experiments. The position of the ship is measuredwith a 4 camera Proreflex motion capture system runningat 15Hz in a limited basin area of 5� 12m. The basin isequipped with a DHI wave-maker system, and waves aregenerated using the JONSWAP distribution with asignificant wave height of 0.01m and a mean period ofTs ¼ 0:75 s.Only one model ship was available at the lab for
experiments, and hence the main ship was simulated as avirtual ship on a computer. This virtual ship was based ona theoretical ship model, and controlled using the back-stepping controller from Skjetne et al. (2003). Thelimitation of only one ship implies that there was no shipinteraction during the experiments, and thus no observa-tions nor influence from the Venturi-effect between the twoships. During the experiments with waves, only the supplyship experienced the waves as a disturbance, while the mainship sailed in a virtual calm sea.Two ships that are not identical in their design and at
different positions will experience different impacts fromenvironmental disturbances. However, in practical replen-ishment operations both ships would pursue a heading intothe waves, and the effect of currents, waves and windwould therefore to some extent be similar on the two ships.The experiments with waves affecting the supply ship andwith a virtual main ship in calm sea thus serve as anextreme case of how the two ships can experience differentexternal disturbances. The experiments with waves thusserve as a measure of how robust the scheme is withregards to external disturbances.In the experiments, only the position of the supply vessel
was available for measurements, and thus the velocitysynchronization of _Z! _Zm could not be verified directly.The only states available from the experimental data weree, ~e, ~Zm and ~_Zm. However, when the given experimentalstates compare with the corresponding states of thesimulation results, it is plausible to conclude that the totalstate of the experimental results is comparable to thesimulated results as well.
-
ARTICLE IN PRESS
Table 1
Initial states and gains for set point regulation
Initial states for main and supply ship Observer and controller gains
Ztruem ¼ ½0 � 1 0�T Kbp ¼ diag½35 15 5�
Zm ¼ ½0 0 0�T Kbd ¼ diag½70 40 10�Z ¼ ½�1 � 1:5 � p
2�T K1 ¼ diag½8 8 2�
K2 ¼ diag½10 10 10�
E. Kyrkjebø et al. / Control Engineering Practice 15 (2007) 741–755746
5.2. Simulation setup
The simulations serve as the ideal comparison case withoutmodelling errors, and where no disturbances are present (nocurrents, wind or waves). The controller is based on a modelwithout higher-order damping, and therefore only lineardamping is included in the simulation model. A descriptionof the simulation model is given in Appendix B.
5.3. Tuning
The observer gains K1;K2 and the controller gains Kp;Kdhave to be chosen such that the region of convergence islarge enough to ensure convergence from the initial states,and at the same time such that the ultimate bound ofclosed-loop errors is acceptably small for practical replen-ishment operations. The uniform ultimate boundednessresult is of semi-global nature due to the proportionaldependence on y2 in the bound (A.35) and region ofattraction (A.49). However, for small initial estimationerrors in the observers of (7) and (9), higher initialsynchronization errors can be considered. The strongdependence on the initial estimation errors is the price tobe paid for poor or no velocity and acceleration measure-ments (Nijmeijer & Rodriguez-Angeles, 2003).
The choice of observer gains K1 and K2 in (7) and (9) is achoice between performance of estimates, or low influenceof measurement noise. Choosing the gains too low mayresult in poor estimates which in turn leads to poor controlperformance, while choosing the gains too high may resultin highly fluctuating control actions. In particular, thechoice of a high gain K1 will affect the size of the ultimatebound, while a very small gain will introduce slightlydamped oscillations in the system.
The choice of controller gains Kp and Kd in (6) isinfluenced by the choice of observer gains, since the rule ofthumb is that the observer should converge faster than thecontroller. This cannot be verified directly due to the lack ofa general separation principle for nonlinear system, and canonly be examined for a set point linearization of the system.Increasing the proportional gain Kp in the controller willlower the synchronization position errors. The derivativeterm Kd should be chosen high enough to provide sufficientdamping in the system to prevent oscillations duringtracking, but note that the choice of a high gain Kd willamplify any measurement noise on the velocity estimates.Choosing to map the controller gains to the body-fixed framethrough the kinematic relation in (B.5) provides a moreintuitive reference frame for tuning the controller gains ofany vehicle, but note that this will introduce a mapping fromthe Kp ¼ J�TðZÞKbpJðZÞ
�1 and Kd ¼ J�TðZÞKbdJðZÞ�1 gains to
the size of the ultimate bound in (A.48).
5.4. Experiments with zero main ship acceleration, €Zm ¼ 0
The exponential convergence of the synchronizationscheme can be observed when the main ship acceleration €Zm
is zero, and thus include situations where the main shipmoves with constant non-zero velocity. However, therestriction of constant velocity is difficult to satisfy inexperiments where the main ship is controlled using abackstepping controller, and thus the result of exponentialconvergence have been verified experimentally in thissection using set point regulation of the supply ship to astationary main ship where the velocity vector _Zm isconstant and zero. The supply ship was synchronized toan offset position 1m off the starboard side of the mainship, which is chosen as the origin of the local earth-fixedframe. An overview of initial states and gains for set pointregulation can be found in Table 1.The initial state for the supply ship was chosen to
illustrate the convergence in all parts of the state Z ¼½x; y;c�T, and the same gains were used in the experimentsand simulations to facilitate a back-to-back comparison.The gains were found empirically, and note that thecontroller gains Kbp and K
bd are expressed in the body-fixed
frame to facilitate a more intuitive tuning procedure.All errors are calculated and plotted in a local earth-fixed
North–East–Down (NED) frame, with the initial phase inthe left plot and the performance after settling in the rightplot. The experimental data available from the experimentsare plotted in Fig. 2, and the simulation data are plotted inFig. 3. The simulations converge to zero within 40 s, andthus the data after settling are not shown in Fig. 3. Theexperimental results in Fig. 2 comply with the theoreticalresults of exponential convergence, and compare well withthe simulated results in Fig. 3. Any overshoots duringregulation presents a potential collision hazard whensynchronizing to another marine structure, and the over-shoot in the control errors of Figs. 2 and 3 are seen to besmall. This is furthermore an indication of stabilitymargins for this set of gains. The settling time is sufficientfor practical applications, and the closed-loop errors in theexperiments show small persistent oscillations after set-tling. These oscillations are not found in the simulations,which could suggest that the oscillatory behaviour iscaused by the measurement noise from the camera systeminfluencing the observer performance. The experiment wasalso carried out under wave disturbance, and the results ofthese experiments compare with the results without waves,with a slight increase in the errors as expected. In all, theexperimental results for position keeping compare wellwith the simulations, and thus support the theoreticalresult of exponential convergence of the closed-loop errors
-
ARTICLE IN PRESS
0 5 10 15-2
-1
0
1
2
time [s]
[m],[
rad]
Position error
40 45 50 55-0.01
-0.005
0
0.005
0.01
0 5 10 15-0.2
-0.1
0
0.1
0.2
time [s]
[m],[
rad]
Error in position error estimate
40 45 50 55-0.01
-0.005
0
0.005
0.01
0 5 10 15-0.2
-0.1
0
0.1
0.2
time [s]
[m],[
rad]
Error in main ship position estimate
40 45 50 55-0.01
-0.005
0
0.005
0.01
0 5 10 15-0.2
-0.1
0
0.1
0.2
time [s]
[m/s
],[ra
d/s]
Error in main ship velocity estimate
40 45 50 55-0.01
-0.005
0
0.005
0.01
xy
ψ
xy
ψ
xyψ
ψ
xy
Fig. 2. Experiment errors e, ee, eZm, e_Zm, initial phase (left) and after settling (right).
E. Kyrkjebø et al. / Control Engineering Practice 15 (2007) 741–755 747
under the assumption of zero main ship acceleration,€Zm ¼ 0.
5.5. Experiments for ship replenishment operations
The result of ultimate boundedness of the closed-looperrors for a ship replenishment operation when the mainship has non-zero acceleration was investigated using adesired trajectory with non-zero curvature for the mainship. The main ship tracked this trajectory using thebackstepping controller of Skjetne et al. (2003), and thesupply ship synchronized to the main ship based onposition measurements only and independently of thedesired trajectory. The supply ship became a physicalobserver of the main ship. Note that the ships wouldmaintain a constant course and heading into the waves inpractical ship replenishment operations, and seek to keep
the curvature of the trajectory at a minimum to reduce therisk of collisions. A trajectory with non-zero curvature isillustrative of a situation where the main ship are givengreater manoeuvring freedom than in a straight lineexperiment, and would allow a replenishment operationto be performed in close waters or in busy fairways.When the main ship desired trajectory has a non-zero
curvature, the forward velocity and acceleration of thesupply ship will be different from the velocity andacceleration of the main ship due to the curvature. Thesupply ship’s relative forward velocity to the main ship willtherefore depend on the distance between the two ships in acurve (see Section 3.1). When the supply ship sails the innercurve, the forward velocity of the supply ship is less thanthat of the main ship, and vice versa. An extreme casearises when the radius of the main ship curve is less thanthe distance between the two ships, where the supply ship
-
ARTICLE IN PRESS
0 5 10 15-2
-1
0
1
2
time [s]
[m],[
rad]
Position error
0 5 10 15-1
-0.5
0
0.5
1
[m/s
],[ra
d/s]
time [s]
Velocity error
0 5 10 15-0.2
-0.1
0
0.1
0.2
time [s]
[m],[
rad]
Error in position error estimate
0 5 10 15-0.5
0
0.5
[m/s
],[ra
d/s]
time [s]
Error in velocity error estimate
0 5 10 15-0.2
-0.1
0
0.1
0.2
time [s]
[m],[
rad]
Error in main ship position estimate
0 5 10 15-0.5
0
0.5[m
/s],[
rad/
s]
time [s]
Error in main ship velocity estimate
xyψ
xyψ
xyψ
Fig. 3. Simulation errors e, ~e, ~Zm (left), and _e, ~_e, ~_Zm (right).
Table 2
Initial states and gains for replenishment experiments
Initial states for main and supply ship Observer and controller gains
Ztruem ¼ ½0 � 1 0�T Kbp ¼ diag½100 40 10�
Zm ¼ ½0 0 0�T Kbd ¼ diag½30 20 5�Z ¼ ½�1 2 � p
2�T K1 ¼ diag½8 8 2�
K2 ¼ diag½100 100 5�
E. Kyrkjebø et al. / Control Engineering Practice 15 (2007) 741–755748
in the inner curve would have to perform a backwardmovement.
The experiments for ship replenishment operations useda predefined curved path with a desired velocity of 0.2m/s,corresponding to a velocity of 3.5 kn for the full-scale ship,as the desired trajectory for the main ship. An overview ofthe initial states and gain matrices used in the experimentsis given in Table 2. Again note that the controller gains areexpressed in the body-fixed frame to take advantage of amore intuitive tuning procedure.
Fig. 4 shows the xy-plot for the replenishment operationfor both the experiment and the simulation. The experi-mental data available from the experiments are plotted inFig. 5, and the simulation data are plotted in Fig. 6, whileFig. 7 shows the additional velocity control and observererrors only available from the simulations.
The experimental results in Fig. 5 comply with thetheoretical results of ultimately boundedness of the closed-loop errors, and compare with the simulated results inFig. 6. Note that in the xy-plot of Fig. 4 and in comparingthe experiments of Fig. 5 with the simulated results inFig. 6, the experiments show better performance than inthe simulations. This is due to the fact that the idealsimulation model presented in Appendix B is restricted tolinear damping. The nonlinear damping inherent in themodel ship has a stabilizing effect, and thus much less
damping is needed in the controller gain Kd . The back-to-back comparison is shown here using gains optimized forthe experiments, and thus for the simulations with lineardamping only, these gains are not optimal. Similarperformance as in the experiments can be shown in thesimulations by increasing the Kd gain to compensate for thelack of nonlinear damping.The observer accuracy diminishes slightly at the end of
the path in Fig. 5, which can be contributed to the reducedaccuracy of the measurement system at the end of thebasin. In all, the experimental results for trajectorytracking compare well with the simulations, and thussupport the theoretical result of ultimately boundedness ofthe closed-loop errors for practical ship replenishmentoperations.
-
ARTICLE IN PRESS
-2 0 2 4 6 8 10 12
-2
0
2
x [m]
y [m
]
xy plot
main
supplysimulatedsupplyexperiment
Fig. 4. xy-plot path.
0 10 20 30 40 50-2
-1
0
1
2
time [s]
[m],[
rad]
Position error
55 60 65 70-0.1
-0.05
0
0.05
0.1
0 10 20 30 40 50-0.5
0
0.5
time [s]
[m],[
rad]
Error in position error estimate
55 60 65 70-0.01
-0.005
0
0.005
0.01
0 10 20 30 40 50-0.5
0
0.5
time [s]
[m],[
rad]
Error in main ship position estimate
55 60 65 70-0.01
-0.005
0
0.005
0.01
0 10 20 30 40 50-1
-0.5
0
0.5
1
time [s]
[m/s
],[ra
d/s]
Error in main ship velocity estimate
55 60 65 70-0.02
-0.01
0
0.01
0.02
xyψ
xyψ
xyψ
xyψ
Fig. 5. Experiment errors e, ee, eZm, e_Zm, initial phase (left) and after settling (right).
E. Kyrkjebø et al. / Control Engineering Practice 15 (2007) 741–755 749
6. Discussion
Measurement noise influences the velocity observationsin the observers (with large K2 in (7) and (9)), and can leadto high commanded control actions. The observer perfor-mance is affected when the commanded forces are larger
than the thruster limitations, since the commanded controlforces and moments are used to progress the dynamicalship model in the observer. Here, the duality of the K2 gainis seen; a large gain may cause saturation in the forces,while a small gain may cause larger closed-loop errors dueto poor estimates.
-
ARTICLE IN PRESS
0 10 20 30 40 50
-2
-1
0
1
2
time [s]
[m],[
rad]
Position error
55 60 65 70
-0.1
-0.05
0
0.05
0.1
0 10 20 30 40 50
-0.5
0
0.5
time [s]
[m],[
rad]
Error in position error estimate
55 60 65 70-0.01
-0.005
0
0.005
0.01
0 10 20 30 40 50
-0.5
0
0.5
time [s]
[m],[
rad]
Error in main ship position estimate
55 60 65 70
-0.01
-0.005
0
0.005
0.01
0 10 20 30 40 50-1
-0.5
0
0.5
1
[m/s
],[ra
d/s]
time [s]
Error in main ship velocity estimate
55 60 65 70-0.02
-0.01
0
0.01
0.02
xyψ
xyψ
xyψ
Fig. 6. Simulation errors e, ee, eZm, e_Zm, initial phase (left) and after settling (right).
E. Kyrkjebø et al. / Control Engineering Practice 15 (2007) 741–755750
The controller gains Kp;Kd and observer gains K1;K2 areoptimized for either set point regulation in Section 5.4 orreplenishment in Section 5.5, but intermediate gains thatperform well for both tasks can be found. Note that thetuning of the observer–controller scheme as presented inSection 3 is a highly coupled nonlinear gain tuning problemdue to the influence of observer performance on thecontroller performance and vice versa, and a methodicalgain tuning procedure similar to that presented in Nijmeijerand Rodriguez-Angeles (2003) for robot control, or basedon Section 5.3 should be adopted to simplify the tuningprocess. Valuable input to the tuning process can also befound by linearizing the system around defined set points,and by adopting a pole-placement scheme to shape theperformance of the system.
Robustness of the scheme is investigated by introducingwaves to the supply ship in the experiments. This does not
affect the main ship, since it is a virtual ship running on acomputer, and thus the results can be seen as the ability ofthe control scheme to suppress the effects of externaldisturbances on the synchronization. The comparisonbetween the experiments with and without disturbancesduring replenishment experiments is shown in Table 3where the time-mean of the absolute error E ¼ð1=TÞ
R t0 jejdt and the maximum of the absolute error
Emax are calculated under different conditions, and theresults show only small changes in performance when thesupply ship is under the influence of waves. The robustnessto external disturbances is particularly useful duringpractical ship replenishment operations, where shipsoperating in close proximity of each other will influenceeach other (e.g. through Venturi-effects).Note that although the scheme is robust, it cannot
exceed the physical limitations of the ships. It can be seen
-
ARTICLE IN PRESS
Table 3
Mean and maximum absolute errors for replenishment experiments
ud (m/s) xbody (m) ybody (m) Heading (deg)
meanjej max jej meanjej max jej meanjej max jej
Without waves
0.1 0.0278 0.0421 0.0029 0.0128 0.4641 1.2490
0.2 0.0548 0.0783 0.0123 0.0323 0.5214 2.4064
0.3 0.0790 0.1050 0.0367 0.0896 1.1860 3.7701
With waves: JONSWAP Hs ¼ 0:01m, Ts ¼ 0:75 s0.1 0.0293 0.0503 0.0048 0.0169 0.4412 1.5126
0.2 0.0555 0.0775 0.0146 0.0320 0.6818 2.2002
0.3 0.0790 0.1047 0.0408 0.0969 1.0600 4.3774
0 10 20 30 40 50-1
-0.5
0
0.5
1[m
/s],[
rad/
s]
time [s]
Velocity error
55 60 65 70-0.06
-0.04
-0.02
0
0.02
0.04
0 10 20 30 40 50-1
-0.5
0
0.5
1
[m/s
],[ra
d/s]
time [s]
Error in velocity error estimate
55 60 65 70
-0.02
-0.01
0
0.01
0.02
Fig. 7. Simulation velocity errors _e and e_e, initial phase (left) and after settling (right).
E. Kyrkjebø et al. / Control Engineering Practice 15 (2007) 741–755 751
that when the supply ship sails the outer curve witha velocity of 0.3m/s in Table 3, the thrusters in they-direction are saturated, and the errors increase.
The synchronization observer–controller scheme utilizesa theoretical model of the supply ship to constructestimates of unmeasured states for the two ships, and thusthe performance of the scheme is influenced by theaccuracy of the theoretical model. The model ship usedin the simulations and experiments has been thoroughlymodelled and tested to identify its model parameters(Skjetne, Smogeli, & Fossen, 2004), and contributingnonlinear damping terms have been identified for themodel. Nevertheless, the scheme performs well under thelinear damping assumption made in the control design,notwithstanding the inherent nonlinear damping of themodel ship in the experiments. Thus, due to the fact thatthe main difficulty in constructing an accurate theoreticalmodel of a ship lies in the identification of damping terms(Fossen, 2002; Skjetne et al., 2004), it can be conjecturedthat the simulation and experimental results presented in
this paper are representative for a full-scale UNREPoperation. This is furthermore supported by the results ofFossen and Strand (1999) where a model-based observerwas compared in experiments on a full-scale supply vesselto simulations on a theoretical model with excellent results.
7. Conclusions and future work
A leader–follower synchronization output feedbackcontrol scheme has been presented for the ship replenish-ment problem where only position/heading of the two shipswere available as measurements. The synchronizationscheme closed-loop errors were shown to be semi-globallyexponentially convergent when the main ship accelerationwas zero, and semi-globally uniformly ultimately boundedfor replenishment operations with non-zero main shipacceleration. The scheme requires no knowledge ofpredefined paths, and relies upon nonlinear observers toestimate the velocity and acceleration of the two ships forthe case where the mathematical model of the main ship is
-
ARTICLE IN PRESSE. Kyrkjebø et al. / Control Engineering Practice 15 (2007) 741–755752
unknown. Experimental results from tests with a modelship were back-to-back compared with ideal simulations,and were found to correspond well with the theoreticalresults. The experiments showed that the synchronizationobserver–controller scheme is suited for practical replen-ishment operations, and that the scheme is robust withrespect to environmental disturbances and force satura-tions, and suppress the effects of model errors andmeasurement noise.
Future work aims at investigating the interaction effectson performance in experiments with two model ships, andto include higher order damping terms to further explorethe properties of nonlinear damping in the control scheme.
Appendix A. Stability analysis
This section presents the proof of Theorem 1. Beforederiving the closed-loop error dynamics in Section A.1, anintroduction to some useful results on uniform ultimateboundedness is made, which will be useful in the stabilityanalysis of Section A.2.
Definition 2 (Khalil, 2002). The solutions of _x ¼ f ðt;xÞ areuniformly ultimately bounded if there exists positive con-stants b and c, independent of t0X0, such that for everya 2 ð0; cÞ there is T ¼ Tða; bÞX0 such thatkxðt0Þkpa) kxðtÞkpb 8tXt0 þ T , (A.1)with ultimate bound b. If this holds for an arbitrarily large a,then the solutions are globally uniformly ultimately bounded.
Lemma 3 (Nijmeijer and Rodriguez-Angeles, 2003). Con-sider the following function g : R! R:
gðyÞ ¼ a0 � a1yþ a2y2; y 2 Rþ, (A.2)where ai40; i ¼ 0; 1; 2. Then gðyÞo0 if y1oyoy2, where
y1 ¼a1 �
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffia21 � 4a2a0
q2a2
; y2 ¼a1 þ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffia21 � 4a2a0
q2a2
, (A.3)
with y1; y240.
Proposition 4 (Nijmeijer and Rodriguez-Angeles, 2003). LetxðtÞ 2 Rn be the solution of the differential equation _x ¼f ðt;xðtÞÞ where f ðt;xðtÞÞ is Lipschitz and under initialconditions xðt0Þ ¼ x0, and assume that there exists a functionV ðxðtÞ; tÞ that satisfies
PmkxðtÞk2pV ðxðtÞ; tÞpPMkxðtÞk2, (A.4)
_V ðxðtÞ; tÞpkxðtÞk � gðkxðtÞkÞo0 8y1okxðtÞkoy2, ðA:5Þwith Pm and PM positive constants, gð�Þ as in (A.2) and y1; y2as in (A.3). If y24
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiP�1m PM
qy1 then xðtÞ is locally uniformly
ultimately bounded.
This implies that a system is uniformly ultimately boundedif it has a Lyapunov function whose time derivative isnegative in an annulus of a certain width around the origin(Nijmeijer & Rodriguez-Angeles, 2003).
A.1. Error dynamics
By inserting the controller (6) into the model (1) underAssumption A1, and by subtracting MðZÞ€Zm þ CðZ; _ZÞ_Zm þDðZÞ_Zm on each side, the closed-loop error dynamics of thecontroller becomes
MðZÞ€eþ CðZ;b_ZÞ_eþDðZÞ_eþ Kd _eþ Kpe¼MðZÞðb€Zm � €ZmÞ þ CðZ;b_ZÞb_Zm � CðZ; _ZÞ_Zm þDðZÞb_Zm�DðZÞ_Zm � Kdðb_e� _eÞ. ðA:6Þ
Due to Property P1 and
b_Zm � _Zm ¼ e_e� e_Z; b€Zm � €Zm ¼ ddt ðe_e� e_ZÞ (A.7)the resulting error dynamics from (A.6) is
MðZÞ€eþ CðZ;b_ZÞ_eþDðZÞ_eþ Kd _eþ Kpe¼MðZÞ d
dtðe_e� e_ZÞ þ CðZ; _ZÞðe_e� 2e_ZÞ þ CðZ;b_ZÞðe_Zþ _e� e_eÞ
þDðZÞðe_e� e_ZÞ þ Kde_e. ðA:8ÞFrom the observers of (7) and (9), the estimation errordynamics becomes
d
dtee ¼ e_e� K1ee,
d
dte_e ¼MðZÞ�1½CðZ;e_ZÞe_Z� 2CðZ; _ZÞe_Z�DðZÞe_Z� 2Kpee�þ K2eZ� 2K2ee� €Zm ðA:9Þ
and
d
dteZ ¼ e_Z� LZ1eZ,
d
dte_Z ¼MðZÞ�1½CðZ;e_ZÞe_Z� 2CðZ; _ZÞe_Z�DðZÞe_Z� Kpee� � K2ee.
ðA:10Þ
By defining a new set of coordinates
ē ¼ e� Zm; eZm ¼ ee� eZ,_̄e ¼ _e� _Zm; _eZm ¼ e_e� e_Z� K1eZm ðA:11Þthe synchronization closed-loop error dynamics of (A.8)can be rewritten as
MðZÞ€̄eþ CðZ; _ZÞ_̄eþDðZÞ _̄eþ Kd _̄eþ Kpē¼MðZÞK1 _eZm þDðZÞK1eZm � CðZ; _ZÞð_eZþ K1ðeZ� eZmÞÞþ CðZ; _eZþ K1eZÞð _̄e� K1eZmÞ þ Kdð_eZþ K1ðeZþ eZmÞÞ� KpeZm ðA:12Þ
and the estimation closed-loop error dynamics of (A.9) and(A.10) as
€eZm ¼ �MðZÞ�1KpðeZþ eZmÞ � K1 _eZm � K2eZm � €Zm€eZ ¼ �MðZÞ�1KpðeZþ eZmÞ � K1 _eZ� K2ðeZþ eZmÞþMðZÞ�1½CðZ; _eZþ K1eZÞ � 2CðZ; _ZÞ þDðZÞ��ð_eZþ K1eZÞ. ðA:13Þ
-
ARTICLE IN PRESSE. Kyrkjebø et al. / Control Engineering Practice 15 (2007) 741–755 753
By the coordinate transformation of (A.11) and theestimation error dynamics in (A.9) and (A.10) the vectorx from (17) and y 2 R6n defined as
yT ¼ ½ _̄eT ēT _eZTm eZTm _eZT eZT� (A.14)are related by x ¼ Ty for a non-singular ð6n; 6nÞ matrix T.
A.2. Stability analysis
Consider the vector y 2 R6n as defined in (A.14) and takethe Lyapunov function
V ðyÞ ¼ 12yTPðyÞy, (A.15)
where PðyÞ ¼ PðyÞT is given by
PðyÞ ¼
�0MðZÞ l0MðZÞl0MðZÞ Kp þ l0Kd
" #0 0
0I mðeZd ÞI
mðeZd ÞI K2" #
0
0 0I gðeZÞI
gðeZÞI K2" #
2666666666664
3777777777775,
(A.16)
where I 2 Rn�n is the identity matrix, �0; l0;m0; g0 2 R arepositive constants
l040; m040; g040; �040 (A.17)
to be determined, and mðeZd Þ and gðeZÞ are defined bymðeZdÞ ¼ m01þ keZdk ; gðeZÞ ¼ g01þ keZk . (A.18)Sufficient conditions for positive definiteness of PðyÞ are
Kd;m4l0MM ; K2;m4maxfm20; g20g, (A.19)
where MM is the largest eigenvalue of M. By choosing theminimum eigenvalues of the gain matrices K1;m;K2;m;Kp;m;Kd;m to satisfy a set of lower bounds, and together with theboundedness of mðeZmÞ and gðeZÞ, this implies that there existsconstants Pm and PM such that
12Pmkyk2pV ðyÞp12PMkyk2. (A.20)The time derivative of (A.15) along the error dynamics of(A.12)–(A.13) yields
_V ðyÞ ¼ �yTQðyÞyþ bðy; _Z; €ZmÞ, (A.21)
where
bðy; _Z; €ZmÞ ¼ �0½_̄eT þ l0ēT�CðZ; _eZþ K1eZÞ½ _̄e� L1eZm�
� �0½ _̄eT þ l0ēT�CðZ; _ZÞ½_eZþ K1ðeZ� eZmÞ�
� �0l0ēTCðZ; _ZÞ _̄e
� �0½ _̄eT þ l0ēT�DðZÞ½ _̄e� K1eZm� þ �0l0ēT _MðZÞ _̄e
þ ½_eZT þ geZT�M�1ðZÞ½CðZ; _eZþ K1eZÞ� 2CðZ; _ZÞ �DðZÞ�½_eZþ L1eZ�þ _geZT _eZþ _meZTm _eZm � ½_eZTm þ meZTm�€Zm ðA:22Þ
and QðyÞ ¼ QðyÞT is given by
Q ¼Q11 Q12 Q13
QT12 Q22 Q23
QT13 QT23 Q33
264375, (A.23)
with the block matrices
Q11 ¼ �0Km � l0M 0
0 l0Kp
" #, ðA:24Þ
Q12 ¼;�02
�MðZÞK1 Kp � KmK1�l0MðZÞK1 l0ðKp � KmK1Þ
" #, ðA:25Þ
Q13 ¼�02
�Km �KmK1�l0Km �l0KmK1
" #, ðA:26Þ
Q22 ¼K1 � m0I 12ðM
�1ðZÞKp þ mK1Þ12ðM�1ðZÞKp þ mK1ÞT mðM�1ðZÞKp þ K2Þ
24 35,ðA:27Þ
Q23 ¼0 1
2M�1ðZÞKp
12ðM�1Kp þ K2Þ 12ððmþ gÞM
�1Kp þ gK2Þ
24 35,ðA:28Þ
Q33 ¼K1 � gI 12ðM
�1ðZÞKp þ gK1Þ12ðM�1ðZÞKp þ gK1ÞT gðM�1ðZÞKp þ K2Þ
24 35.ðA:29Þ
From the definition in (A.18) it follows that
_meZTm _eZm ¼ �m eZTm _eZm1þ keZmk !
_eZTmeZmpm0k_eZmk2, ðA:30Þ_geZT _eZ ¼ �g eZT _eZ
1þ keZk !
_eZTeZpg0k_eZk2, ðA:31Þwhere m0 and g0 are upper bounds on mðeZdÞ and gðeZÞ,respectively. The definition of the inertia matrix MðZÞimplies that
_MðZÞ ¼ ddt
MðZÞ ¼ qMðZÞqZ
_Z (A.32)
and since 0oMmpkMðZÞkpMM and the fact that Z onlyappears as an argument of trigonometric functions in MðZÞit can be concluded that
Mpmk_Zkpk _MðZÞkpMpMk_Zk. (A.33)Using Properties P3 and P4, and introducing the vectoryN as
yTN ¼ ½k _̄ek; kēk; k_eZmk; keZmk; k_eZk; keZk� (A.34)an upper bound for (A.21) is
_V ðyÞpkyNkða0 �QN ;mkyNk þ a2kyNk2Þ, (A.35)
-
ARTICLE IN PRESSE. Kyrkjebø et al. / Control Engineering Practice 15 (2007) 741–755754
where QN ;m is the minimum eigenvalue of the matrix QN ¼QTN given by
QN ¼
Q11N Q12N Q13N
QT12N Q22N Q23N
QT13N QT23N
Q33N
26643775, (A.36)
where
Q11N ¼ �0Kd;m þDM � l0MM q12
q12 l0Kp;m
" #, ðA:37Þ
Q12N ¼�02
�MMK1;M �DMK1;M Kp;M � Kd;MK1;M � CMVM�l0MMK1;M q24
" #,
ðA:38Þ
Q13N ¼�02
CMV M � Kd ;M CMV MK1;M � Kd ;MK1;Ml0ðCMV M � Kd;M Þ l0ðCM VMK1;M � Kd ;MK1;M Þ
" #,
ðA:39Þ
Q22N ¼L1;m � 2m0 12ðM
�1m Kp;M þ m0K1;M Þ
12ðM�1m Kp;M þ m0K1;M Þ m0ðM�1m Kp;m þ K2;mÞ
24 35,ðA:40Þ
Q23N ¼0 1
2M�1m Kp;M
12ðM�1m Kp;M þ L2;M Þ 12ððm0 þ g0ÞM
�1m Kp;M þ g0K2;M Þ
24 35,ðA:41Þ
Q33N ¼L1;m � 2g0 þ 2M�1m CMV M þM�1m DM q56
q56 q66
" #,
ðA:42Þ
q12 ¼1
2l0ðCMVM �MMVM þDM Þ, ðA:43Þ
q24 ¼ l0ðKp;M � Kd;MK1;M � CMVM �DMK1;M Þ, ðA:44Þq56 ¼ 12ðM
�1m Kp;M þ g0K1;MÞ þM
�1m CMVM ðK1;M þ g0Þ
þM�1m DMðK1;M þ g0Þ, ðA:45Þq66 ¼ g0ðM�1m Kp;m þ K2;m þ 2M
�1m CMVMK1;m þM
�1m DMK1;mÞ
ðA:46Þ
and a0 and a2 are positive scalars given by
a0 ¼ ð1þffiffiffiffiffim0p Þ
ffiffiffiffiffiffiffiffiAM
p, (A.47)
a2 ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi8M�1m CMLM
qð ffiffiffiffiffig0p þ ffiffiffiffiffiffiffiffiffiffiK1;Mp Þ
þffiffiffiffiffiffiffiffiffiffiffiffi�0CM
pð1þ
ffiffiffiffiffil0
pÞðK1;M þ 2
ffiffiffiffiffiffiffiffiffiffiK1;M
pÞ
þM�1m CMð5þffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffig0 þ 2K1;M
pþ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffig0K1;M þ K21;M þ g0
qþ K1;M
ffiffiffiffiffig0p þ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi8 g0K1;M
pÞ
þ �0ðffiffiffiffiffiffiffiffiCM
pð1þ 2
ffiffiffiffiffiffiffiffiffiffiK1;M
pÞ þ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffil0ðMpM þ CMÞ
pÞ
þffiffiffiffiffiffiffiffiffi�0l0
pð2
ffiffiffiffiffiffiffiffiCM
pð1þ
ffiffiffiffiffiffiffiffiffiffiK1;M
pÞ þ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiMpM þ CM
pÞ.ðA:48Þ
By choosing the gains Kp;Kd ;L1;L2 and the constants�0; l0;m0; g0 such that QN is positive definite, the synchro-
nization observer–controllers scheme can be treated as aperturbed system. Eq. (A.15) together with (A.35) andProposition 4 allows us to conclude local uniform ultimateboundedness of yN and consequently of y. Through thecoordinate transformation defined by (A.14) it follows thatthe original state x in (17) is locally uniformly ultimatelybounded. Moreover, since a2 depends explicitly on K1;M , y2in Proposition 1 can be made arbitrarily small by a properchoice of K1;M , and thus the ultimate bound for x can bemade arbitrarily small. Also note that the region ofattraction is given by
B ¼ x 2 R6n j kxko y2kTk
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiP�1m PM
q� �. (A.49)
Since the size of the region of attraction B is proportionalto y2, this region can be expanded by increasing y2. Thus,the closed-loop errors x are semi-globally uniformlyultimately bounded.The ultimate boundedness result is due to the non-vanishing
disturbance from the main ship acceleration €Zm. Under theassumption of constant velocity of the main ship ð€Zm ¼ 0Þ, thederivative of the Lyapunov function (A.35) is reduced to
_V ðyÞpkyNk2ð�QN ;m þ a2kyNkÞp� kkyNk2 (A.50)since (A.49) guarantees that QN ;m4a2kyNk. Semi-globalexponential convergence to zero of the closed loop errors x ¼Ty for zero main ship acceleration €Zm ¼ 0 follows directlyfrom (A.50).
Appendix B. Simulation model
Simulations serve as the ideal comparison case withoutmodelling errors, and where no disturbances are present(no currents, wind or waves). The controller is based on amodel without higher-order damping, and therefore onlylinear damping is included in the simulation model. Thesurface ship model of Cybership II represented in the bodyframe is written as
M_nþ CðnÞnþDðnÞn ¼ tn (B.1)and is a function of the body fixed velocities n ¼ ½u; v; r�T insurge, sway and yaw, respectively. The model matrices aredefined as
M ¼
25:8 0 0
0 33:8 1:0115
0 1:0115 2:76
26643775, ðB:2Þ
CðnÞ ¼
0 0 �33:8v� 1:0115r
0 0 25:8u
33:8vþ 1:0115r �25:8u 0
26643775,ðB:3Þ
D ¼
0:72 0 0
0 0:86 �0:11
0 �0:11 �0:5
26643775. ðB:4Þ
-
ARTICLE IN PRESSE. Kyrkjebø et al. / Control Engineering Practice 15 (2007) 741–755 755
The model can be transformed to generalized coordinatesZ ¼ ½x; y;c�T, where x; y is position and c is heading, in alocal earth-fixed coordinate frame through the kineticrelation of (Fossen, 2002)
_Z ¼ JðZÞn ¼ JðcÞn ¼cosc � sinc 0sinc cosc 0
0 0 1
264375n, (B.5)
where JðcÞ is a simple rotation around the z-axis in theearth-fixed frame. The resulting model now becomes
J�TMJ�1 €Zþ J�T½CðnÞ �MJ�1 _J�J�1 _Zþ J�TDJ�1 _Z ¼ J�Ttn, ðB:6Þ
where the argument of J ¼ JðcÞ ¼ JðZÞ has been droppedfor simplicity. The model of (B.6) is now in the form of (1)with the obvious definitions.
See also Alfaro-Cid, McGookin, Murray-Smith, andFossen (2005) for a genetic evolution of the modelparameters in experiments for Cybership II.
References
Alfaro-Cid, E., McGookin, E., Murray-Smith, D., & Fossen, T. (2005).
Genetic algorithms optimisation of decoupled sliding mode control-
lers: Simulated and real results. Control Engineering Practice, 13(6),
739–748.
Blekhman, I. (1988). Synchronization in science and technology. New York:
ASME Press Translations.
Brown, S., & Alvestad, R. (1978). Simulation of maneuvering control
during underway replenishment. Journal of Hydronautics, 12(3),
109–117.
Brunt, M. (1998). Coordination of redundant systems. Ph.D. thesis,
Technical University Delft, The Netherlands.
Chen, H. (2003). Probabilistic evaluation of FPSO-tanker collision in
tandem offloading operation. Ph.D. thesis, The Department of Marine
Technology, Norwegian University of Science and Technology,
Trondheim, Norway.
Dimmick, J., Alvestad, R., & Brown, S. (1978). Two-block romeo
(simulation of ship steering control for underway replenishment).
In Proceedings of the 28th IEEE vehicular technology conference
(pp. 382–389), New York.
Encarnacao, P., & Pascoal, A. (2001). Combined trajectory tracking and
path following: An application to the coordinated control of
autonomous marine craft. In Proceedings of the 40th IEEE conference
on decision and control (pp. 964–969), Orlando, FL, USA.
FAS, (1999). Underway replenishment (UNREP)—navy ships (online).
Available: hhttp://www.fas.org/man/dod-101/sys/ship/unrep.htmi, 4November 2003.
Fossen, T. (2002). Marine control systems: Guidance, navigation, and
control of ships, rigs and underwater vehicles. Marine Cybernetics,
Trondheim, Norway.
Fossen, T. I., & Strand, J. P. (1999). Passive nonlinear observer design for
ships using Lyapunov methods: Full-scale experiments with a supply
vessel. Automatica 35(1), 3–16.
Hill, D. D. (1989). Underway replenishment (online). Available: hhttp://www.globalsecurity.org/military/library/report/1989/HDD.htmi, 4 July2004.
Huijberts, H., Nijmeijer, H., & Willems, R. (2000). Regulation and
controlled synchronization for complex dynamical systems. Interna-
tional Journal of Robust Nonlinear Control, 10, 363–377.
Huygens, C. (1673). Horoloquium oscilatorium. Paris, France.
Kato, N. (2000). Control performance in the horizontal plane of a fish
robot with mechanical pectoral fins. IEEE Journal of Oceanic
Engineering, 25(1), 121–129.
Kato, N., & Endo, M. (1989). Guidance and control of unmanned,
untethered submersible for rendezvous and docking with underwater
station. Proceedings of the OCEANS (Vol. 3, pp. 804–809).
Khalil, H. (2002). Nonlinear Systems (3rd ed.). New Jersey: Prentice-Hall.
Kyrkjebø, E., & Pettersen, K. (2003). Ship replenishment using
synchronization control. In Proceedings of the sixth IFAC conference
on manoeuvring and control of marine craft (pp. 286–291), Girona,
Spain.
Kyrkjebø, E., Wondergem, M., Pettersen, K. Y., & Nijmeijer, H. (2004).
Experimental results on synchronization control of ship rendezvous
operations. In Proceedings of the IFAC conference on control
applications in marine systems (pp. 453–458), Ancona, Italy.
Lindegaard, K.-P. (2003). Acceleration feedback in dynamic positioning.
Ph.D. thesis, Norwegian University of Science and Technology,
Trondheim, Norway.
Miller, M., & Combs, J. A. (1999). The next underway replenishment
system. Naval Engineers Journal, 111(2), 45–55.
Nijmeijer, H., & Rodriguez-Angeles, A. (2003). Synchronization of
mechanical systems (Vol. 46). World Scientific Series on Nonlinear
Science, Series A.
NROTC (2003). Underway replenishment (online). Available: hhttp://www.unc.edu/depts/nrotc/classes/classinfo/NAVS52/12Underway
Replenishment.ppti, 13 March 2003.Paulsen, M. (1996). Nonlinear control of marine vehicles using only position
and attitude measurements. Ph.D. thesis, The Norwegian University of
Science and Technology, Trondheim, Norway.
Rodriguez-Angeles, A., & Nijmeijer, H. (2001). Coordination of two robot
manipulators based on position measurements only. International
Journal of Control, 74, 1311–1323.
Skjetne, R., Fossen, T. I., & Kokotovic, P. (2004). Robust output
maneuvering for a class of nonlinear systems. Automatica, 40(3),
373–383.
Skjetne, R., Ihle, I.-A. F., & Fossen, T. I. (2003). Formation control by
synchronizing multiple maneuvering systems. In Proceedings of the
sixth IFAC conference on manoeuvring and control of marine craft
(pp. 280–285), Girona, Spain.
Skjetne, R., Smogeli, Ø., & Fossen, T. I. (2004). Modelling, identification
and adaptive maneuvering of cybership II: A complete design with
experiments. In Proceedings of the IFAC conference on control
applications in marine systems (pp. 203–208), Ancona, Italy.
Uhrin, J., & Thaler, G. (1976). Design of a nonlinear speed control system.
In Proceedings of the IEEE Milwaukee symposium on automatic
computation and control (pp. 179–183), New York.
White, K., Smith, S., Ganesan, K., Kronen, D., Rae, G., & Langenbach,
R. (1996). Performance results of a fuzzy behavioral altitude
flight controller and rendezvous and docking of an autonomous
underwater vehicles with fuzzy control. In Proceedings of
1996 symposium on autonomous underwater vehicle technology
(pp. 117–124).
http://www.fas.org/man/dod-101/sys/ship/unrep.htmhttp://www.globalsecurity.org/military/library/report/1989/HDD.htmhttp://www.globalsecurity.org/military/library/report/1989/HDD.htmhttp://www.unc.edu/depts/nrotc/classes/classinfo/NAVS52/12UnderwayReplenishment.ppthttp://www.unc.edu/depts/nrotc/classes/classinfo/NAVS52/12UnderwayReplenishment.ppthttp://www.unc.edu/depts/nrotc/classes/classinfo/NAVS52/12UnderwayReplenishment.ppt
Output synchronization control of ship replenishment operations: Theory and experimentsIntroductionPreliminariesSynchronization control schemeSynchronization objectiveState feedback synchronizationOutput feedback synchronization
StabilitySimulations and experimentsExperimental setupSimulation setupTuningExperiments with zero main ship acceleration, m=0Experiments for ship replenishment operations
DiscussionConclusions and future workStability analysisError dynamicsStability analysis
Simulation modelReferences