
Nonparametric Inference for VaR, CTE and Expectile with ... · Nonparametric Inference for VaR, CTE...
32
Nonparametric Inference for VaR, CTE and Expectile with High-Order Precision Zhiyi Shen † , Yukun Liu ‡ and Chengguo Weng †* † Department of Statistics and Actuarial Science, University of Waterloo ‡ School of Statistics, East China Normal University Abstract Value-at-Risk (VaR) and Conditional Tail Expectation (CTE) are two most frequently applied risk measures in quantitative risk management. Recently, expectile has also at- tracted much attention as a risk measure due to its elicitability property. In this paper, empirical likelihood based estimation with high-order precision is established for these three risk measures, and the superiority of our estimation is justified both in theory and via sim- ulation study. Extensive simulation studies confirm that our method significantly improves the coverage probabilities for interval estimation, compared to three competing methods available in the literature. Keywords: Empirical Likelihood, Risk Measure Estimation, Value-at-Risk, Conditional Tail Expectation, Expectile. * Corresponding author. Postal address: M3-200 University Avenue West, Waterloo, Ontario, Canada, N2L 3G1. Emails: Shen ([email protected]), Liu ([email protected]), and Weng ([email protected]) 1
Transcript of Nonparametric Inference for VaR, CTE and Expectile with ... · Nonparametric Inference for VaR, CTE...

Nonparametric Inference for VaR, CTE
and Expectile with High-Order Precision
Zhiyi Shen†, Yukun Liu‡ and Chengguo Weng†∗
†Department of Statistics and Actuarial Science, University of Waterloo
‡School of Statistics, East China Normal University
Abstract
Value-at-Risk (VaR) and Conditional Tail Expectation (CTE) are two most frequently
applied risk measures in quantitative risk management. Recently, expectile has also at-
tracted much attention as a risk measure due to its elicitability property. In this paper,
empirical likelihood based estimation with high-order precision is established for these three
risk measures, and the superiority of our estimation is justified both in theory and via sim-
ulation study. Extensive simulation studies confirm that our method significantly improves
the coverage probabilities for interval estimation, compared to three competing methods
available in the literature.
Keywords: Empirical Likelihood, Risk Measure Estimation, Value-at-Risk, Conditional Tail
Expectation, Expectile.
∗Corresponding author. Postal address: M3-200 University Avenue West, Waterloo, Ontario, Canada, N2L
3G1.
Emails: Shen ([email protected]), Liu ([email protected]), and Weng ([email protected])
1

1 Introduction
Risk measures play a central role in modern quantitative risk management (QRM). They
are indispensable concepts that the insurance and finance industries rely on for internal
risk assessment and external solvency regulation. Value-at-Risk (VaR) and Conditional
Tail Expectation (CTE) are two most frequently applied risk measures in QRM practice
and regulatory frameworks such as Solvency II and BASEL Accords. Expectile is another
risk measure which attracts much attention from both practitioners and academicians due
to its elicitability property.
LetX be a random variable representing the loss of a given insurance or finance portfolio.
For p ∈ (0, 1), the 100(1−p)% VaR of the portfolio is defined as the (1−p)th upper quantile
of the cumulative distribution of X, i.e.,
VaR1−p(X) = infx ∈ R : Pr(X > x) ≤ p.
In the real-world application, p is usually a small number such as 5% or even 1%. VaR only
quantifies a threshold for the loss to exceed with a small probability. The CTE is defined
as the expected loss given that the loss exceeds the VaR, and thus, CTE can better reflect
the magnitude of the loss on the tail as a risk measure. Formally, the 100(1− p)% CTE of
the loss variable X is defined as
CTE1−p(X) = E [X|X > VaR1−p] .
A risk measure closely-related to CTE is the expected shortfall (ES), which at the 100(1−p)% confidence level is defined as
ES1−p(X) =1
p
∫ 1
1−pVaRt(X) dt.
It is well known that CTE1−p(X) coincides with ES1−p(X) for continuous loss variable X.
The expectile was introduced by Newey and Powell (1987) for asymmetric regression
in a statistics context, and it has been exploited in the field of QRM as a risk measure
recently due to its nice elicitability property (e.g., Ziegel, 2014; Bellini et al., 2014). For
a loss random variable X with E[X2]<∞, the expectile of X at 100(1− p)% confidence
level is defined as the following unique minimizer:
e1−p(X) := argminx∈R
(1− p)E[((X − x)+)2] + pE[((x−X)+)2]
(1)
or equivalently the unique solution to the equation
e1−p(X) = E[X] +1− 2p
pE[(X − e1−p(X))+] (2)
where the notation Y+ := maxY, 0.
2

For the practical use of risk measures, the underlying loss distribution is unknown and
often needs to be estimated from historical data, which naturally raises the problem of
statistical inference for risk measures. Traditional inference methods for VaR and CTE are
usually parametric, assuming that the loss follows a specific parametric distribution, such
as lognormal, finite mixture, Weibull and Pareto distributions. Composite models are also
proposed to mimic the heavy tail feature of loss distributions in more recent parametric
estimation literature; we refer to Cooray and Ananda (2005), Scollnik and Sun (2012),
Nadarajah and Bakar (2014) and Abu Bakar et al. (2015) for detailed discussion. Yet,
parametric methods are exposed to the model mis-specification risk, and it demands a
certain delicate model selection procedure in order to reduce such risk in practice. As
alternative resolutions, nonparametric statistical inference techniques can be used to reduce
the model mis-specification risk in the estimation of risk measures and no model selection
procedure is needed throughout the inference procedure. Examples for the estimation of
VaR and CTE include the smoothing kernel method (Chen and Tang, 2005; Chen, 2008),
the influence function method (Yamai and Yoshiba, 2002; Manistre and Hancock, 2005), the
bootstrap method (Dowd, 2005; Hardy, 2006), and the empirical likelihood (EL) method
(Baysal and Staum, 2008). Nonparametric inference for risk measures other than VaR,
CTE and expectile has also attracted intensive attentions, see for example, Jones and
Zitikis (2003), Peng et al. (2012), and Ahn and Shyamalkumar (2014), among others.
Despite the extensive studies on nonparametric estimation of the relevant risk measures,
the literature on analyzing high-order precision of estimation for risk measures is relatively
thin, and this paper aims to contribute in this direction via studying the empirical likelihood
(EL) based nonparametric inference for VaR, CTE, and expectile with high-order precision.
The EL method was first proposed by the seminal works of Owen (1988, 1990) for interval
estimation of a population mean, and extended to infer parameters defined through general
estimating equations by Qin and Lawless (1994). Since then, it has become a popular non-
parametric statistical tool due to its numerous nice properties. For example, the EL ratio
has a limiting chi-square distribution, known as Wilks’ Theorem; an EL based confidence
region has a data-driven shape and is transformation respecting (Hall and La Scala, 1990).
We refer to Owen (2001) for a more thorough review on EL methods.
The EL estimation is derived from optimizing an empirical likelihood subject to certain
estimating equations of parameters of interest. There is no estimating equation solely for
the risk measure CTE in general and thus EL estimation for CTE is not possible if not
relating it to some other relevant parameter(s) for certain joint estimating equations. One
natural choice is to utilize the joint estimating equations for the pair (VaR,CTE) as shown
in (5) in the sequel, which result from the definitions of the pair. These joint estimating
equations have been proposed by Baysal and Staum (2008) for the estimation of the EL
confidence region of (VaR,CTE). The EL methods proposed by Baysal and Staum (2008),
however, is hindered by the non-smoothness of the two equations in (5) in three aspects.
3

First, the EL confidence region for (VaR,CTE) is also non-smooth which is passed on from
the non-smoothness of the estimating equations; see Figure 1 of Baysal and Staum (2008).
Second, the one- and two-sided coverage accuracy of EL confidence regions can never be
better than O(n−1/2) (Chen and Hall, 1993), where n denotes the sample size used in
estimation. Last but not least, the non-smoothness of the estimating equations makes it
challenging, if not impossible, to profile an EL estimation for CTE from the EL. The same
comments are also applied to the EL estimation for expectile; see equation (21).
For the estimation of VaR and CTE, the application of the EL method is also hindered
by non-existence of solutions to the empirical estimating equations. The EL estimation for
a parameter θ is based on the following empirical log-likelihood ratio function:
EL(θ) = −2 sup
n∑i=1
log(npi) : pi ≥ 0,
n∑i=1
pi = 1,
n∑i=1
pig(Xi; θ) = 0
, (3)
where X1, X2, · · · , Xn is a sample of the loss variable X, and g(x, θ) is a known function
such that θ is the unique solution to the estimating equation E [g(X; θ)] = 0. For each given
θ, EL(θ) is well defined only if the convex hull of g(Xi, θ), i = 1, . . . , n contains the origin.
When n is not large, this convex hull often fails to contain the origin (see Chen et al., 2008),
and this issue becomes even more severe when g contains an indication function as specified
in (4) and (5) for the estimation of VaR and CTE, where the parameter 1 − p is usually
as large as 0.99 so that the effective sample size used for the estimation is only about a
hundredth of the sample size n. In other words, for 1−p = 0.99, even when the sample size
is as large as 1000, there is only about 10 effective data points for the estimation of the risk
measures and it is easy to lead to the non-existence of EL(θ) in this case. The convention of
solving this problem is to assign infinity blindly to the EL ratio statistic EL(θ), although it
provides no information on the relative plausibility of the parameter values and may result
in discontinuous confidence regions (Chen et al., 2008). Such a convention can severely
jeopardize the accuracy of the estimation in terms of coverage probability as confirmed by
our simulation studies in Section 3.
To develop EL estimation for VaR, CTE and expectile with high-order precision, we
smooth and adjust the estimating equations used in the estimation by borrowing tech-
niques from statistics literature. On the one hand, we adopt kernel method to smooth the
estimating equations as suggested by Chen and Hall (1993) and this leads to the smoothed
EL (SEL) estimation for the three risk measures. We show that the SEL confidence regions
improve the two-sided coverage accuracy to O(n−1
), and that the SEL also admits Bartlett
correction which further improves the confidence regions to even better O(n−2
)coverage
accuracy. On the other hand, we further exploit Chen et al. (2008)’s method to adjust the
smoothed empirical estimation to completely circumvent the non-definition problem.
In addition to the theoretical justification, in this paper we also conduct extensive
simulation studies to illustrate the superiority of the smoothed adjusted empirical likelihood
4

(SAEL) method to three competing methods which are available in the literature. They
include the raw EL method (Baysal and Statum, 2008), the influence function method
(Manistre and Hancock, 2005) and the bootstrap method (Dowd, 2005; Hardy, 2006). Our
simulation studies constantly confirm that the SAEL significantly outperforms all the three
competing methods in terms of coverage probabilities.
The remainder of the paper proceeds as follows. In section 2, we first define the SEL
for VaR and CTE, and show that it is Bartlett correctable. The SAEL is then proposed
and proven to achieve high-order precision. In the end of the section, we extend the SAEL
method for the estimation of expectile. Section 3 presents simulation studies in two different
frameworks. Section 4 is the application of the SAEL method to the Danish Fire Loss Data.
Section 5 concludes the paper, and all the proofs of theorems are relegated to the Appendix.
2 EL Estimation for VaR, CTE and Expectile
2.1 Smoothed EL for VaR and CTE
Let X1, X2, · · · , Xn be n independent and identically distributed observations from the
distribution function F (x) of a continuous loss variable X. Generally if the parameter of
interest θ is the unique solution to an estimating equation E [g(X; θ)] = 0 for some known
function g(x; θ) with dimension no less than that of θ, then the EL estimation for θ is
obtained based on the empirical log-likelihood ratio function EL(θ) defined in equation (3).
When the parameter of interest is VaR1−p(X), we may directly choose g(X;µ) = ϕ(X;µ)
with
ϕ(X,µ) = I(X − µ)− p. (4)
where I(x) = 1 if x > 0 and 0 otherwise. If both the VaR1−p(X) and CTE1−p(X) are of
interest, then g may be chosen to be
ψ(X;µ, η) =
(I(X − µ)− p
(1/p)XI(X − µ)− η
). (5)
It is necessary to point out that these estimating functions are non-smooth, which leads to at
least two undesirable consequences. Firstly, EL confidence intervals (regions) based on such
estimation equations have relatively large O(n−1/2) coverage error (Chen and Hall, 1993),
as opposed to the common O(n−1
)error. Secondly, when η is fixed, the maximization of
EL(µ, η) with respect to µ often has no solution, which means that we cannot define the
profile EL of η (Baysal and Staum, 2008).
In order to circumvent these issues, Chen and Hall (1993) proposed a smoothed EL when
only the quantile or µ is of interest. In this paper, we extend such a smoothing method to
the pair (VaR1−p(X), CTE1−p(X)) or equivalently (µ, η), which in turn makes it possible
5

to estimate CTE1−p(X) via profiling empirical likelihood. Let K be a bounded, smooth
and compactly supported density function which satisfies
∫ujK(u)du =
1 , j = 0
0 , j = 1
κ , j = 2
(6)
with κ being a non-zero constant. Define G(x) =∫ x−∞K(y)dy, and Gh(x) = G(x/h)
with h > 0 a small constant to be determined and known as bandwidth in nonparametric
statistics literature. The key of Chen and Hall (1993)’s smoothed EL is to replace the
non-smooth estimating functions by their smooth counterparts:
ϕh(X;µ) = Gh(X − µ)− p
and
ψh(X;µ, η) =
(Gh(X − µ)− p
(1/p)XGh(X − µ)− η
). (7)
The smoothed EL function (SEL) for VaR1−p(X) and CTE1−p(X) are respectively given
by
SEL1(µ) = −2 sup
n∑i=1
log(npi) : pi ≥ 0,n∑i=1
pi = 1,n∑i=1
piϕh(Xi;µ) = 0
,
and
SEL2(µ, η) = −2 sup
n∑i=1
log(npi) : pi ≥ 0,n∑i=1
pi = 1,n∑i=1
piψh(Xi;µ, η) = 0
.
If only CTE1−p(X) is of interest, the smoothness of the estimating function ψh(x, µ, η)
makes it easy to define the profile SEL of CTE1−p:
SEL3(η) = minµ
SEL2(µ, η).
The following theorem extends Chen and Hall (1993)’s result from quantile to the bivariate
parameter (µ, η) and the CTE parameter η, respectively.
Theorem 1. Let µ0 and η0 be the true values of VaR1−p(X) and CTE1−p(X). If
(1) the first and second derivatives of the underlying distribution function F (x) exist in a
neighbourhood of µ0 and are continuous at µ0;
(2) the first derivative F ′(µ0) > 0;
(3) the bandwidth h satisfies nh4 → 0 and nh/ log n→∞, as n→∞;
(4) E[X2]<∞,
6

then
PrSEL1(µ0) ≤ x =χ2
1 ≤ x
+O(n−1
), (8)
where χ2d denotes a random variable having the χ2
d distribution for positive integer d. In
addition, if E(X4) <∞, then
PrSEL2(µ0, η0) ≤ x = Prχ2
2 ≤ x
+O(n−1
), (9)
Pr SEL3(η0) ≤ x = Prχ2
1 ≤ x
+O(n−1
). (10)
Proof. See the Appendix.
Although the coverage accuracy of an EL confidence interval for quantile is onlyO(n−1/2)
(Chen and Hall, 1993), Theorem 1 indicates that the smoothing technique makes it recover
the usual coverage accuracy O(n−1
). With the smoothed estimating equations, this cover-
age accuracy can be further enhanced to O(n−2
)with the Bartlett correction technique as
we can shortly see in the next subsection.
2.2 Bartlett-Corrected SEL for VaR and CTE
We begin by defining the so-called Bartlett correction factors accompanying the SELs for
VaR1−p(X) and the pair (VaR1−p(X), CTE1−p(X)). For VaR1−p(X), we define
b1 =1
2
α4
α22
− 1
3
α23
α32
(11)
where αk = E(ϕh(X;µ0))k. For the pair (VaR1−p(X), CTE1−p(X)), we consider the
eigendecomposition Var(ψh(X;µ0, η0)) = ΓΛΓᵀ for the variance matrix of ψh(X;µ0, η0),
and define Y ≡ (Y1, Y2)ᵀ := Γᵀψh(X;µ0, η0). Put βi1i2···ik = E(Yi1Yi2 · · ·Yik) and
b2 =1
2
2∑i=1
2∑j=1
βiijjβiiβjj
− 1
3
2∑i=1
2∑j=1
2∑k=1
β2ijk
βiiβjjβkk. (12)
We summarize the Bartlett correctability of the SEL in the next theorem.
Theorem 2. Assume that the same conditions (1)-(4) in Theorem 1 are satisfied. If n3h4
is bounded from above as n→∞, then we have
Pr
SEL1(µ0)
1 + b1/n≤ x
= Pr
χ2
1 ≤ x
+O(n−2
). (13)
Furthermore, if E(X18) <∞, then
Pr
SEL2(µ0, η0)
1 + b2/n≤ x
= Pr
χ2
2 ≤ x
+O(n−2
). (14)
7

Proof. See the Appendix.
Remark 1. The Bartlett correction result of SEL2(µ0, η0), i.e. equation (14), is new, al-
though that of SEL1(µ0), i.e. equation (13), has been disclosed by Chen and Hall (1993).
Remark 2. The Bartlett correction factors b1 and b2 are generally unknown in applica-
tions, and may be replaced by their estimates. If the estimators are√n-consistent, such a
replacement does not affect high-order results in Theorem 2. This conclusion is achieved by
re-studying the proof of this theorem, and hence omitted.
For the estimation of the Bartlett correction factors b1 and b2, we recommend using
the less-biased estimator proposed by Liu and Chen (2010). This estimation strategy is
also adopted in our simulation study in a later section. Let b1 and b2 be the less-biased
estimators of b1 and b2. According to Theorem 2, we can construct 100(1 − α)%-level
confidence intervals for VaR1−p(X) and (VaR1−p(X), CTE1−p)ᵀ(X)) respectively with
second-order precision as followsµ :
SEL1(µ)
1 + b1/n≤ χ2
1(1− α)
,
(µ, η)ᵀ :SEL2(µ, η)
1 + b2/n≤ χ2
2(1− α)
,
where χ2d(1− α) denotes the 100(1− α)% quantile of the χ2
d distribution.
Theoretically, we can show that the profile SEL for CTE SEL3(η) is also Bartlett cor-
rectable. However, the accompanying Bartlett correction factor is too complicated to be
estimated (Chen and Cui, 2006). This makes it infeasible to construct high-order precise
confidence intervals for CTE through Bartlett corrected profile SEL. So, we compromise to
use Theorem 1 instead and construct a 100(1−α)% level confidence interval for CTE1−p(X)
as follows η : SEL3(η) ≤ χ2
1(1− α).
The coverage error of this confidence interval is O(n−1
)according to Theorem 1.
2.3 Smoothed AEL for VaR and CTE
An undesirable property of the aforementioned EL and SEL, which are all defined through
(3), is that they may have no definition. Given θ, if the origin lies outside the convex hull
of g(X1; θ), · · · , g(Xn; θ), then there exists no (p1, · · · , pn) to satisfy pi ≥ 0,∑n
i=1 pi = 1
and∑n
i=1 pig(Xi, θ) = 0 simultaneously. In this situation, the EL in (3) is not defined and
does not work any more. This issue becomes even more serious for the estimation of VaR
and CTE as we have previously commented in the first section.
8

To circumvent this non-definition problem, Chen et al. (2008) proposed for each θ,
adding an artificial pseudo-observation
g(θ) = −an
n∑i=1
g(Xi, θ)
to g(X1; θ), · · · , g(Xn; θ), where a > 0 is called the adjustment level. The resulting
EL defined based on the expanded data-set Ω(θ) = g(X1; θ), · · · , g(Xn; θ), g(θ) is called
adjusted empirical likelihood (AEL), i.e.,
AEL(θ; a) = −2 sup
n+1∑i=1
log(npi) : pi ≥ 0,
n+1∑i=1
pi = 1, (15)
n∑i=1
pig(Xi; θ) + pn+1g(θ) = 0
. (16)
Clearly, given any θ, Ω(θ) always contains the origin as an interior point, therefore the AEL
is always well-defined. It was disclosed by Chen et al. (2008) that the AEL inherits all the
first-order properties of the EL if a = o(n2/3). Furthermore, Liu and Chen (2010) found
that the AEL can have the same high-order precision as the Bartlett-corrected EL when
the adjustment level a is chosen to be half of the Bartlett correction factor.
Enlightened by Chen et al. (2008), and Liu and Chen (2010), we introduce pseudo
observation to circumvent the non-definition problem suffered by the SEL method discussed
in the previous subsection and abbreviate this as SAEL method. In relative to SEL1(µ; a)
and SEL2(µ, η; a) defined previously, we denote their adjusted counterparts by SAEL1(µ; a)
and SAEL2(µ, η; a), respectively. That is, SAEL1(µ; a) (resp., SAEL2(µ, η; a)) is defined in
line with equations (15) and (16) with the function g(Xi; θ) replaced by ϕh(Xi;µ) (resp.,
ψh(Xi;µ, η)). In the following theorem, we show that conclusions from Liu and Chen (2010)
are still valid in terms of estimating VaR and CTE.
Theorem 3. Assume that conditions (1)-(4) in Theorem 1 are satisfied. If n3h4 is bounded
and a = b1/2 + op (1), then we have
Pr SAEL1(µ0; a) ≤ x = Prχ2
1 ≤ x
+O(n−2
), (17)
where b1 is given in (11). Furthermore, if E[X4]<∞ and a = b2/2 + op (1), then
Pr SAEL2(µ0, η0; a) ≤ x = Prχ2
2 ≤ x
+O(n−1
), (18)
where b2 is given in (12). Finally, under the condition that E[X18
]<∞,
Pr SAEL2(µ0, η0; a) ≤ x = Prχ2
2 ≤ x
+O(n−2
)(19)
with a = b2/2 + op (1).
9

Proof. See the Appendix.
Remark 3. The condition E[X18] < ∞ is imposed for technical reason. It is a strong
condition for applications involving a heavy-tailed loss distribution. If this condition is
violated and we only have E[X4] <∞, then SAEL2(µ0, η0; a) still has an accuracy of O(n−1)
as indicated by equation (18). Furthermore, if we only have E[X2] <∞ and take a = O(1),
the SAEL2(µ0, η0; a) still attains a square-root-n convergence rate as a direct consequence of
the central limit theorem.
When only CTE1−p(X) is of interest, we can make inference through the profile SAEL
of CTE1−p(X):
SAEL3(η; a) = minµ
SAEL2(µ, η; a). (20)
Theorem 4. Assume that conditions (1)-(4) in Theorem 1 are satisfied. If n3h4 is bounded,
E[X4]<∞, and a = O(1), we have
PrSAEL3(η0; a) ≤ x = Prχ2
1 ≤ x
+O(n−1
).
Proof. See the Appendix.
Remark 4. Theoretically, we can prove that SAEL3(η0; a) also achieves the same high-
order precision as the Bartlett corrected EL if we set a = b3/2 where b3 is the Bartlett
correction factor accompanying SEL3(η0). However, the far complicated form of b3 hinders
the application of SAEL3(η0; b3/2). Thus, we do not consider Bartlett correction for the
estimation of CTE1−p(X) in this paper.
By virtue of the above Theorem 3, second-order precise confidence intervals for VaR1−p(X)
and (VaR1−p(X), CTE1−p(X)) with a confident level 100(1 − α)% can be constructed as
follows µ : SAEL1
(µ; b1/2
)≤ χ2
1(1− α),
(µ, η) : SAEL2
(µ, η; b2/2
)≤ χ2
2(1− α),
for which both have a coverage error O(n−2
). Further, in view of Theorem 4, an SAEL
based confidence interval for CTE1−p(X) is given byη : SAEL3(η; a) ≤ χ2
1(1− α)
which has a coverage error of O(n−1
).
10

2.4 EL Estimation for Expectile
As we have introduced in the first section, the expectile has become one of interesting risk
measures in the field of QRM due to its elicitability property (e.g., Ziegel, 2014; Bellini, et
al. 2014). For a loss random variable X with E[X2]<∞, the expectile e1−p(X) is defined
as the unique minimizer in equation (1) or equivalently the unique solution to equation (2).
Denote ξ = e1−p(X), and by virtue of equation (2), we can choose g(X; ξ) = φ(X; ξ)
for the EL estimation of the expectile, where
φ(X; ξ) = X + β(X − ξ)I(X − ξ)− ξ. (21)
The smoothing counterpart is given by
φh(X; ξ) = X + β(X − ξ)Gh(X − ξ)− ξ, (22)
Then we can define the smoothed adjusted EL, SAEL4(ξ; a), for e1−p(X) based on the
smoothed function φh(X; ξ) following the same procedure as we conducted for VaR1−p(X) in
the last section. We establish a high-order asymptotic result for the SAEL based estimation
of the expectile in the theorem below.
Theorem 5. Assume that conditions (1)-(3) in Theorem 1 are satisfied, and that E[X4]<
∞. If we choose a = b4/2 + op (1) and let ξ0 denote the true value of e1−p(X), then
PrSAEL4(ξ0; a) ≤ x = Prχ2
1 ≤ x
+O(n−1
),
where b4 is the Bartlett correction factor for e1−p(X) and its expression is similar to (11),
except that ϕh(X;µ0) is replaced by φh(X; ξ0).
Furthermore, if E[X18
]<∞, then
PrSAEL4(ξ0; a) ≤ x = Prχ2
1 ≤ x
+O(n−2
).
Proof. See the Appendix.
We summarize the convergence rates of the proposed SAEL method for the three in-
volved risk measures in Table 1. We have some interesting observations from the table.
Firstly, when the parameter of interest is the VaR, the SAEL method achieves a second-
order accuracy under all moment conditions. Secondly, when only the second moment of
the loss random variable exists, the SAEL method exhibits a square-root-n convergence
rate for CTE and Expectile, and this rate is same as that of raw EL, influence function,
and Bootstrap methods. Thirdly, if the fourth moment of the loss variable exists, the SAEL
achieves at least first-order convergence rate for all risk measures and outperforms the three
competitors (i.e., raw EL, influence function, and Bootstrap methods). It is notable that
11

Table 1: Summary of the convergence rates of SAEL method for VaR, CTE, and Expectiles
under different moment conditions. Assume all the other conditions in Theorems 3–5 are
satisfied.
ParameterMoment conditions
Unconditional E[X2]<∞ E
[X4]<∞ E
[X18
]<∞
VaR O(n−2
)O(n−2
)O(n−2
)O(n−2
)(VaR,CTE) −− O
(n−1/2
)O(n−1
)O(n−2
)CTE −− O
(n−1/2
)O(n−1
)O(n−1
)Expectiles −− O
(n−1/2
)O(n−1
)O(n−2
)
only loss data sets are available in practice, and one does not exactly know whether the un-
derlying probability distribution has a finite certain high-order moments or not. The SAEL
method automatically gains the extra estimation accuracy when the high-order moments
exist for the loss distribution.
2.5 Numerical Implementation
The implementation of the SAEL method can be decoupled into two stages1:
(i) Data transformation Given a sequence of loss observations Xi, i = 1, 2, . . . , n,we transform the data into a set
Y θi , i = 1, 2, . . . , n+ 1
with Y θ
i = gh (Xi; θ) for
i = 1, 2, . . . , n, and Yn+1 = −a/n∑n
i=1 gh (Xi; θ), where gh(·; ·) is a certain estimating
function, and its specific form depends on the risk measure of interest; for example, if
the Expectile is the parameter one intends to infer, gh(·; ·) is chosen as φh(·; ·) in Eq.
(22).
(ii) Raw EL inference Given the new data setY θi , i = 1, 2, . . . , n+ 1
, the evaluation
of the SAEL ratios (SAELj(·; a), j = 1, 2, 4) at a certain parameter θ is equivalent to
computing the raw EL ratio for a null mean parameter. This can be achieved by
employing the R package “emplik” (Zhou and Yang (2016)) for the raw EL method.
The SAEL3(·; a) can be obtained by first evaluating SAEL2(·; a) and then solving the
optimization problem in Eq. (20).
As shown in the above, the implementation of the SAEL method is the same as the raw
EL method applied to a certain transformation of the raw data, and thus, the existing R
package “emplik” can be directly applied.
1The authors are grateful to an anonymous referee for suggesting us to discuss this practical issue.
12

3 Simulation Studies
This section provides extensive results for the finite-sample behavior of the proposed SAEL
method in terms of coverage accuracy. The simulation studies focus on the estimation of
VaR and CTE. We use Bartlett corrected SAEL method for the estimation of VaR and the
pair (VaR,CTE) by virtue of Theorem 3. For the estimation of CTE, the SAEL method
is applied without Bartlett correction because of the overwhelming intricacy in estimating
the Bartlett correction factor; see Remark 4.
Three competing methods, including the raw EL method (Baysal and Statum, 2008),
the influence function method (Manistre and Hancock, 2005), and the bootstrap method
(Dowd, 2005), are considered for comparison. The confidence level (1− p) associated with
the risk measures is set to be 0.99 and 0.95, respectively, since they are commonly used in
insurance and financial risk management practice. We choose the kernel function involved
in the SAEL method to be
K(u) =
3√
5
20
(1− u2
5
), if |u| ≤
√5
0, otherwise
which is also employed by Chen and Hall (1993). We set the bandwidth h = n−1/2 as the
impact of a different bandwidth on the coverage probability is not significant (Chen and
Hall, 1993).
Remark 5. As previously discussed, the raw EL method is not always well-defined. When
the ill-deffiniton occurs, we follow the convention in literature (see Chen et al. (2008))
and set the value of the log likelihood ratio at infinity. Accordingly, the confidence interval
(region) of raw EL method is not well-posed in general and the length of confidence inter-
val is intractable. The coverage probabilities of all competing methods in sequel numerical
experiments are calculated as the number of statistics (e.g., the SAEL ratios) smaller than
the critical value divided by the total number of replications.
We focus on two-sided confidence intervals (regions) for VaR and CTE with nominal level
95%, and the simulated coverage probabilities are obtained based on 10,000 replicaitons.
For the estimation of CTE, the raw EL is excluded from comparison because the raw EL
does not apply for the estimation of CTE. We choose the number of bootstrap replicates
for the bootstrap method to be B = 2000 as the improvement in coverage accuracy by
using larger bootstrap size is marginal (Baysal and Statum, 2008). Two examples from
Manistre and Hancock (2005), the Pareto distribution and an “in-the-money” European
put option, are considered to generate random samples of loss data for our simulation study.
In each combination of parameter and example, a number of sample sizes are considered to
demonstrate how the coverage accuracy may vary along the sample size.
13

3.1 The Pareto Distribution
As a commonly-used distribution to fit heavy-tailed loss data in insurance, the Pareto
distribution is defined by
F (x) = 1−(
λ
λ+ x
)ν, x > 0,
where ν and λ are the shape and scale parameters, respectively. The theoretical VaR and
CTE at the confidence level of (1− p) for the Pareto loss are respectively given by
VaR1−p = λ(p−1/ν − 1),
CTE1−p = λ
(ν
ν − 1× p−1/ν − 1
).
Depending on the value of the parameter ν, the high-order moments of the Pareto
distribution may not exit and the condition E(X18) < ∞ in Theorems 2 and 3 may be
violated. In such a situation, the SAEL-based confidence interval for VaR and CTE cannot
ensure the theoretical higher order asymptotic coverage precision, but the likelihood ratio
functions still have the asymptotic Chi-square distributions as long as its second moment
exists. In this sense, the SAEL method is fairly robust. In our simulation study, we follow
the numerical setting in Manistre and Hancock (2005) and choose ν = 2.5 and λ = 25 so
that the Pareto distribution is quite heavy-tailed, and the condition E(X18) <∞ is indeed
violated. We choose such a numerical setting because we are interested in the finite sample
performance of SAEL method and making a comparison between the SAEL method and the
other three competing methods in a situation which is unfavourable to the SAEL method.
1. Coverage comparison for VaR0.99. When VaR0.99 is taken as the only parameter
of interest, we choose the sample size from 250 to 1250 in multiple of 250. The coverage
probabilities are reported in the left panel of Table 2. The portion of non-definition of the
raw EL method occurring among the 10000 replications of simulation is reported in the
“ND (%)” rows. We have several interesting observations from Table 2. Firstly, the SAEL
method has the closest-to-nominal coverage probability (i.e., 95%) among the four methods
under consideration. This means that the coverage accuracy of the SAEL confidence inter-
vals are uniformly the best. Secondly, the SAEL method has almost the exact 95% coverage
probability when the sample size n reaches 500 or larger, even though the effective sample
size is only 500× 1% = 5 in the estimation for a sample size of 500. Thirdly, although the
coverage probabilities are pretty close to each other between the raw EL and the SAEL,
the SAEL method is better and this is probably due to the non-definition issue associated
with the raw EL. The portion of non-definition for the raw EL ratios is significantly large
(at a level of 8.05%) when the sample size is relatively small (at n = 250). Fourthly, the
raw EL performs significantly better than the bootstrap method and the influence function
method. The coverage probabilities of the influence function method are quite far away
14

Table 2: Coverage probability (%) of confidence intervals (resp., regions) for VaR1−p (resp.,
(VaR1−p,CTE1−p)) of the Pareto distribution.
Parameter VaR0.99 (VaR0.99,CTE0.99)
Sample Size n 250 500 750 1000 1250 500 1000 1500 2000 2500
raw EL 90.39 92.93 96.12 94.54 93.32 63.33 77.86 82.79 84.97 85.89
SAEL 91.80 94.66 96.11 94.55 94.62 75.47 81.95 85.25 87.29 87.44
Influence Function 69.21 81.06 82.46 86.32 86.01 55.73 66.60 71.23 74.61 77.07
Bootstrap 87.35 91.34 91.77 92.01 91.68 64.98 73.39 76.83 79.30 80.73
ND (%) 8.05 0.56 0.03 0.00 0.00 27.13 6.13 1.45 0.36 0.08
Parameter VaR0.95 (VaR0.95,CTE0.95)
Sample Size n 250 500 750 1000 1250 500 1000 1500 2000 2500
raw EL 94.38 94.83 94.47 94.79 95.57 86.64 88.94 90.75 91.35 91.38
SAEL 94.45 94.88 94.53 94.86 95.44 87.91 89.88 91.23 91.69 91.74
Influence Function 86.00 89.75 89.55 91.03 91.23 76.55 81.48 84.91 86.27 86.78
Bootstrap 92.15 92.73 93.27 93.33 93.84 81.72 84.89 87.40 88.35 88.72
ND (%) 0.00 0.01 0.00 0.00 0.00 0.10 0.01 0.00 0.00 0.00
from the nominal level even when the sample size is more than 1000. The inferiority of
these two methods may result from the fact that the effect sample size is rather small in
the estimation of the risk measure and the asymptotic variance of the point estimator is
large and cannot be estimated well enough.
2. Coverage comparison for (VaR0.99,CTE0.99) When both the two risk measures are
of interest, we choose larger sample sizes, from 500 to 2500 with an increment of 250, in our
simulation study due to the well known fact that CTE is more difficult to estimate than
VaR because it involves the whole tail of the loss distribution. The simulation results are
presented in the last panel of Table 2. We observe that all the reported coverage probabilities
deviate from the nominal level of 95% by much more than those on the left panel in Table 2
which is for the estimation of VaR0.99 solely. Nevertheless, the SAEL method still produces
the most accurate confidence regions among the four competing methods. In particular,
when the sample size is 1000, the SAEL method has a coverage probability of 81.95%,
which is even much larger than those of the influence method and the bootstrap method
with a favourably large sample size of 2500. For the raw EL method, the non-definition
problem is impressively severe. In particular, the portion of non-definition is as large as
27.13% for sample size n = 500 and more than 6% for a sample size even as large as 1000.
In contrast, the SAEL is free of the non-definition issue and produces much better coverage
probabilities across all the sample sizes considered.
15

Table 3: Coverage probability (%) of confidence intervals for CTE1−p of the Pareto distri-
bution.
Parameter CTE0.99
Sample Size n 500 1000 1500 2000 2500
SAEL 65.34 78.74 83.40 86.44 87.88
Influence Function 71.69 78.68 80.99 83.71 84.63
Bootstrap 65.20 73.97 77.70 80.85 82.21
Parameter CTE0.95
Sample Size n 500 1000 1500 2000 2500
SAEL 87.94 90.27 91.02 91.76 92.18
Influence Function 85.35 87.88 89.28 89.86 90.37
Bootstrap 83.03 86.51 88.18 89.00 89.52
3. Coverage comparison for CTE0.99 For the estimation of CTE0.99, the raw EL does
not apply because there is neither sole estimating equation for the parameter nor can it
be profiled from the EL jointly for VaR and CTE. So, the comparison is among the three
candidates only: the SAEL method, the influence function method, and the bootstrap
method. In our simulation study, the sample size is chosen from 500 to 2500 with an
increment of 500 and the simulation results are reported in Table 3. From Table 3, we can
see that the superiority of the SAEL method over the other two is not as impressive as it
does for the estimation of VaR as shown in Table 2, which can be explained by the fact that
the theoretical coverage precision of SAEL confidence interval for CTE is only of O(n−1
)as opposed to O
(n−2
)for the estimation of VaR; see Theorems 2 and 4. Under a sample
size of 500, the SAEL method does not perform as well as the influence function method
in terms of the coverage probabilities. This probably due to the fact that the influence
function method relies on a certain normal approximation for the underlying distribution,
and the distribution of the associated point estimate is relatively closer to its asymptotic
benchmark (i.e., normal distribution) under a small sample size. The phenomenon that
normal-approximation-based methods perform better than EL-based methods under a small
sample size is not solely for the estimation of VaR and CTE as we observed here, but also
for that of the mean of a distribution. For example, the Hotelling’s T 2 method, which is
a normal-approximation-based method, has been observed to beat the EL-based methods
under a small size, see e.g., Table 4 of Liu and Chen (2010). When the sample size steps up to
1000, the SAEL method surpasses the influence function method with a coverage probability
of 78.74%. The advantage of the SAEL method becomes significant when sample size is
1500 or larger. In particular, for a sample size of n = 2500, the SAEL has a coverage
probability of 87.88% which is much better than that of 84.63% for the influence function
method and 82.21% for the bootstrap method.
4. Confidence intervals We also compare the confidence intervals (CIs) produced by
the SAEL method, the influence function method and the bootstrap method. We exclude
16

the raw EL method from the comparison, because as we have pointed out in Remark 5
that the confidence interval of the raw EL method is intractable due to the thorny issue of
non-definition. For the SAEL method and the influence function method, computing the
confidence intervals involves a root-searching procedure and is rather time-consuming. So,
we only conduct 100 replications of simulation and compute the point estimate and the
lower/upper limit of the CIs for each. The calculation procedure of the point estimate will
be described in detail in Section 4. Two different sample sizes, 250 and 1250 (resp., 500
and 2500) are considered for VaR1−p (resp., CTE1−p). The average results from the 100
replications are reported in Table 4. As one may expect, the lengths of the CIs produced by
all methods are considerable, in particular for CTE0.99, as the Pareto distribution considered
here has an extraordinarily heavy tail. It is also notable that the influence function method
gives relatively shorter CIs compared with the other two methods but at the cost of less
accurate coverage probabilities as shown in Table 2. Furthermore, the lengths of CIs shrink
as the sample size increases for all the three methods, which confirms the convergence of
the associated statistics to their limiting distributions. However, under a relatively small
size, e.g., 250, the lower limit of the bootstrap CI is negative (see the numbers in Table
4 with bold-face) which shows the bootstrap method has abysmal performance at small
sample size in the sense of quite lengthy CIs. This thorny issue might be sparked by the
poor estimation for the standard deviation of the bootstrap statistic under a small sample
size.
5. Simulation results for p = 0.05 We also report the simulation results for p = 0.05
in Tables 2, 3, and 4. As one may expect, the coverage probabilities of all the three methods
are closer to the nominal level (i.e., 95%) than those for p = 0.01 since the effective sample
size is enlarged by shifting p from 0.01 to 0.05. Moreover, Tables 2 and 3 show that the
SAEL method still performs the best in terms of coverage accuracy, but its improvement
on the raw EL method is not as significant as it was under the case of p = 0.01. We also
observe that the problem of non-definition for the raw EL is soothed to a large extent under
a relative large value of p, e.g., 0.05 considered here, because the effective sample size is
sizable. Furthermore, Table 4 shows that the bootstrap method produces more reliable CI
for VaR0.95 (resp., CTE0.95) than it does for VaR0.99 (resp., CTE0.99). Finally, it is palpable
from Table 4 that all the three methods give less volatile point estimates for VaR and CTE
at a 0.95-level as revealed by shorter CIs.
3.2 An “in-the-money” European put option
As a second example, we construct confidence intervals/regions for VaR0.99 and CTE0.99 of
an “in-the-money” European put option which has been studied by Manistre and Hancock
(2005). Assume that the option matures in T = 10 years with a strike price of X = 110
and that the annual continuously compounded interest rate is r = 6%. Suppose that the
17

Table 4: 95%-level confidence intervals for VaR1−p and CTE1−p of the Pareto distributions
under 100 replications.
Parameter VaR0.99 VaR0.95 CTE0.99 CTE0.95
Sample Size n 250 1250 250 1250 500 2500 500 2500
Lower Limit 73.69 106.29 43.65 50.57 170.12 182.34 85.64 97.53
SAEL Point Estimate 136.01 135.46 58.19 57.25 230.87 234.34 112.51 113.90
Upper Limit 205.19 185.75 83.55 66.82 369.34 334.77 169.02 141.02
Length 131.51 79.46 39.89 16.25 199.22 152.43 83.38 43.49
Lower Limit 91.06 102.93 42.75 50.39 123.45 161.93 74.81 93.07
Influence Point Estimate 135.98 135.45 58.18 57.25 230.14 233.50 112.45 113.43
Function Upper Limit 180.89 167.98 73.61 64.11 357.45 305.06 152.04 133.80
Length 89.83 65.04 30.86 13.72 234.01 143.12 77.22 40.73
Lower Limit -18.85 92.74 36.18 49.15 106.01 162.54 72.98 93.13
Bootstrap Point Estimate 135.98 135.45 58.18 57.25 230.14 233.50 112.45 113.43
Upper Limit 290.80 178.16 80.18 65.35 354.27 304.45 151.92 133.73
Length 309.65 85.42 43.99 16.20 248.26 141.92 78.94 40.60
log return of stock price follows a normal distribution with standard deviation σ√T and
mean ζT so that the discounted payoff of the put option is given by
P = e−rT max(
0, X − S · eζT+σ√T ·Z), (23)
where Z denotes a standard normal random variable. As a remark, this kind of long-term
put option may correspond to an insurer’s exposure to a Guaranteed Minimum Maturity
Benefit and is of particular interest to actuaries in the risk management of variable annuities,
see e.g., Hardy (2000).
Straightforward calculation yields the following explicit expressions of VaR1−p and
CTE1−p for the option’s discounted payoff:
VaR1−p = e−rT ·max(
0, X − S · eζT+σ√T ·zp), (24)
CTE1−p =e−rT
p·[XΦ(d1)− S · Φ
(d1 − σ
√T)· e(ζ+σ2/2)T
], (25)
where zp = Φ−1(1 − p), and Φ−1(·) is the inverse of the standard normal distribution
function Φ(·), and d1 = min(zp,
ln(X)−ln(S)−ζTσ√T
).
In our simulation study, we set the current stock price S = 100, parameter σ = 15%
and vary ζ from 4% to 8% with an increment of 2%. For each set of parameter values, we
can use the expressions in equations (24) and (25) to compute the true values of VaR1−p
and CTE1−p.
1. Coverage comparison for VaR0.99 and (VaR0.99,CTE0.99)ᵀ. Our simulation re-
sults for the parameter VaR0.99 and the pair (VaR0.99,CTE0.99)ᵀ are reported in Table 5.
Clearly, the SAEL is still the winner among the four rivals in terms of coverage accuracy.
It produces perfect coverage probabilities for VaR0.99 when the sample size is at 250 or
18

larger, and for (VaR0.99,CTE0.99)ᵀ when the sample size is at 2000 or larger. The influence
function method always gives the farthest-to-nominal coverage probabilities, indicating a
less competitive estimation approach. As the parameter ζ increases from 4% to 8%, the
performance of influence function method deteriorates, while other methods have very sta-
ble performance. When the sample size is small, the non-definition problem of the raw
EL is severe and causes large coverage error. For example, when ζ = 0.04 and n = 500,
the simulated probability of non-definition of raw EL ratio can be as large as 17.93%, and
meanwhile, the coverage accuracy is only 74.87% which is nearly 12% less than the SAEL
method.
2. Coverage comparison for CTE0.99 Table 6 contains the simulation results for the
estimation of CTE0.99, which show that the SAEL method still outperforms all the other
three competitors and the coverage probabilities are quite stable in response of the change
in parameter ζ. Interestingly, the influence function method produces more accurate con-
fidence intervals than the bootstrap method in this case, although its performance is not
competitive in those aforementioned simulation examples.
3. Confidence intervals We also investigate the CIs produced by the three methods
and the results are reported in Table 7. For the brevity of presentation, we only consider the
case with ζ = 0.06. In terms of the length of CIs, it is palpable from Table 7 that, in most
cases, the influence function method produces the shortest CIs at the price of least accurate
coverage probability (see Tables 5 and 6). The bootstrap method gives the lengthiest CIs for
a small sample size of 250 and its coverage accuracy is less competitive compared with the
SAEL method as disclosed by the previous discussion. The SAEL-based CIs have medium
length but highest coverage precision in most cases considered in the present example.
4. Results under p = 0.05 Similar to the simulation results in the previous subsection,
the nuisance of non-definition problem of the raw EL method is eased to a large extent for
p = 0.05 as disclosed by the “ND (%)” rows of the bottom panel of Table 5. Despite this,
the merit of the SAEL method is still extant, for example, even under a small sample size
of 500, the SAEL confidence regions reach almost nominal level coverage accuracy for the
estimation of (VaR0.95,CTE0.95), see the “(VaR0.95,CTE0.95)” panel of Table 5, which is
probably due to its theoretical high-order accuracy. For the interval estimation of VaR0.95,
the raw EL method and the SAEL method produce close-to-nominal level coverage probabil-
ities for most sample sizes we consider in the numerical setting. Such coverage probabilities
do not necessarily exhibit a monotone trend and they show certain perturbation around the
nominal level due to the random error of simulation. It is also notable that the EL-based
methods constantly beat the other two competing methods in most cases at different drift
rate ζ and sample size, since the hiking of coverage probabilities is rather creeping for the
later two methods. The only case where the SAEL method is less competitive is for the
estimation of CTE0.95 when ζ = 0.08. It is notable that, under a relatively large drift
rate, an overwhelming portion of the simulated stock paths are out-of-the-money (OTM)
19

triggering zero payoffs (see Eq. (23)). In view of this, the distribution function of the
discounted payoff random variable P has a point mass at zero and might not be smooth
around VaR1−p for some large p which voilates Condition (1) of Theorem 1. In the present
context, we observe that the distribution function is still smooth around VaR0.95 = 4.3919,
however, under a limited sample size such as 500, the portion of OTM paths can be larger
than 95% which yields a point estimate of VaR0.95 equal zero. This clearly impairs the
merit of the SAEL method built on the theoretical results conveyed in Theorems 3–5. A
direct application of EL-based methods to zero-inflated data might not be efficient and
tailor-designed approaches should be developed for better efficiency.
In summary, the advantages of SAEL method over the other three competing methods
are also remarkable in estimating the risk measures for the in-the-money European put
option. All the three competing methods have a better performance in terms of coverage
probabilities for the estimation of the risk measures for put options compared to their
performance for the Pareto distribution which we studied in the last subsection. The
possible reason is that the underlying loss distribution is less skewed in the put option
example than in the Pareto distribution example.
4 Real-data analysis
We apply the SAEL method to to analyze the Danish Fire Loss Data collected by Copen-
hagen Reinsurance. A detailed description for the data can be found in McNeil (1997).
The data consists of 2167 fire losses over the period 1980 to 1990 with losses values being
adjusted due to inflation. The unit of the losses is millions of Danish Krone. The his-
togram of this data-set is illustrated in Figure 1, which clearly shows a severe skewness and
a typical heavy-tailed feature of the loss distribution. It is noteworthy that there are three
extreme losses (i.e. 144.66, 152.41, and 263.30 millions) which compose 0.138% of the data,
whereas the remaining observed losses are all less than 70 million. Such catastrophic losses
can be seen as outliers and thus, as a convention (see e.g. Tan and Weng (2014)), they are
excluded in the analysis as well as in the histogram for the ease of presentation.
As we have previously mentioned in Section 2.4, when the condition E[X18
]< ∞ or
even E[X4]<∞ in Theorems 2 and 3 is violated, the SAEL-based confidence interval for
VaR and CTE cannot ensure the theoretical high-order asymptotic coverage precision, but
the standard square-root-n convergence still holds; see the discussion at the end of Section
2.4. The numerical study in section 3.1 has confirmed the superiority of the SAEL method
to three competing methods in estimating risk measures for a Pareto loss distribution which
violates such high-order moment conditions. So, in this section we apply our SAEL method
to the Danish Fire Loss Data even though the data shows a clear heavy-tailed future. We
set the parameter (1− p) to be 0.95 and 0.99 respectively.
20

Table 5: Coverage probability (%) for confidence intervals of VaR1−p and (VaR1−p,CTE1−p)ᵀ
of the European put option.
Parameter VaR0.99 (VaR0.99,CTE0.99)
Sample Size n 250 500 750 1000 1250 500 1000 1500 2000 2500
raw EL 90.76 92.65 96.09 94.43 93.55 74.87 88.83 92.10 93.15 93.39
ζ = 4% SAEL 91.82 94.56 96.05 94.50 95.05 86.67 92.75 94.00 94.47 94.45
Influence Function 87.16 91.64 91.49 92.36 91.92 77.97 84.80 88.21 89.46 89.60
Bootstrap 88.93 91.24 91.88 92.61 92.42 83.00 88.11 90.40 91.17 91.47
ND (%) raw EL 8.10 0.72 0.07 0.00 0.00 17.93 1.68 0.23 0.03 0.02
raw EL 91.03 92.68 95.91 94.26 93.70 74.46 88.86 91.65 92.62 93.52
ζ = 6% SAEL 92.32 94.65 95.84 94.46 95.14 85.97 92.41 93.86 94.53 94.68
Influence Function 83.07 88.24 88.88 90.42 90.72 75.90 83.58 86.81 88.38 89.59
Bootstrap 89.05 91.29 91.65 92.36 92.46 83.27 88.17 90.04 90.83 91.97
ND (%) raw EL 7.59 0.55 0.03 0.01 0.00 17.82 1.97 0.31 0.05 0.03
raw EL 90.42 93.06 96.02 94.46 93.29 75.99 89.68 92.28 92.78 93.60
ζ = 8% SAEL 91.75 94.70 95.94 94.58 94.62 85.62 92.53 93.89 94.41 94.79
Influence Function 71.03 81.49 83.01 86.15 86.49 71.29 80.44 84.28 85.41 87.99
Bootstrap 88.32 91.45 91.08 92.49 92.26 83.81 88.71 90.54 90.95 92.17
ND (%) raw EL 8.14 0.65 0.03 0.00 0.00 17.00 1.81 0.15 0.05 0.01
Parameter VaR0.95 (VaR0.95,CTE0.95)
Sample Size n 250 500 750 1000 1250 500 1000 1500 2000 2500
raw EL 94.51 94.43 94.60 94.59 95.65 93.92 94.23 94.62 95.15 94.98
ζ = 4% SAEL 94.78 94.55 94.80 94.73 95.41 95.09 94.77 94.90 95.32 95.10
Influence Function 92.05 93.40 94.02 93.87 94.17 90.74 92.27 93.40 93.77 93.95
Bootstrap 92.72 93.49 93.86 94.12 93.74 92.69 92.85 93.48 94.01 93.98
ND (%) raw EL 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00
raw EL 94.04 94.94 95.00 94.08 95.66 93.97 94.52 94.82 94.74 95.27
ζ = 6% SAEL 94.23 94.91 95.07 94.82 95.54 94.87 94.97 95.01 94.96 95.42
Influence Function 89.86 92.42 92.58 92.78 93.16 89.03 92.01 92.37 93.01 93.46
Bootstrap 92.35 93.56 93.80 93.52 93.95 92.28 93.27 93.63 93.87 94.29
ND (%) raw EL 0.00 0.00 0.00 0.00 0.00 0.00 0.01 0.01 0.01 0.00
raw EL 94.06 94.65 94.85 94.93 95.39 93.63 94.92 94.63 94.56 95.17
ζ = 8% SAEL 94.19 94.75 94.94 94.94 95.24 94.22 95.16 94.75 94.72 95.27
Influence Function 58.80 71.93 75.29 80.86 82.94 63.87 76.42 82.39 86.63 89.99
Bootstrap 86.14 88.48 90.54 91.31 92.50 88.18 91.64 92.61 93.44 93.93
ND (%) raw EL 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.01 0.00 0.00
21

Table 6: Coverage probability (%) for confidence interval of CTE1−p of the European put
option.
Sample Size n 500 1000 1500 2000 2500
SAEL 82.26 91.46 93.36 93.58 93.58
ζ = 4% Influence Function 83.04 89.50 91.94 91.92 92.64
Bootstrap 82.74 88.28 91.24 91.04 91.74
SAEL 79.14 91.34 93.82 93.34 94.08
CTE0.99 ζ = 6% Influence Function 84.24 89.52 92.12 92.04 92.58
Bootstrap 82.80 88.28 90.94 91.18 92.20
SAEL 77.18 89.32 92.12 94.18 94.08
ζ = 8% Influence Function 84.72 89.86 91.52 93.08 92.64
Bootstrap 83.98 89.00 90.16 92.18 91.70
SAEL 94.68 94.83 94.70 94.90 95.09
ζ = 4% Influence Function 93.48 94.03 94.19 94.52 94.61
Bootstrap 92.64 93.65 93.99 94.47 94.34
SAEL 92.95 94.40 94.90 94.61 94.75
CTE0.95 ζ = 6% Influence Function 92.92 93.99 94.25 94.21 94.57
Bootstrap 92.26 93.52 94.01 94.05 94.40
SAEL 86.38 90.31 91.70 92.86 93.50
ζ = 8% Influence Function 92.61 94.04 94.27 94.31 94.54
Bootstrap 91.20 93.59 94.06 93.86 94.36
Table 7: 95%-level confidence intervals for VaR1−p and CTE1−p of the put option under 100
replications. The drift parameter ζ is set as 0.06.
Parameter VaR0.99 VaR0.95 CTE0.99 CTE0.95
Sample Size n 250 1250 250 1250 500 2500 500 2500
Lower Limit 18.81 23.76 8.84 12.08 26.63 29.70 18.51 20.58
SAEL Point Estimate 26.72 27.07 14.02 14.62 30.28 31.84 21.76 22.19
Upper Limit 29.98 30.29 20.25 17.19 33.91 34.39 25.55 23.93
Length 11.17 6.54 11.41 5.12 7.28 4.69 7.04 3.35
Lower Limit 21.32 24.01 8.65 12.12 26.04 29.54 18.19 20.53
Influence Point Estimate 26.72 27.07 14.02 14.62 30.28 31.84 21.76 22.19
Function Upper Limit 32.12 30.13 19.39 17.13 34.45 34.14 25.34 23.86
Length 10.79 6.13 10.74 5.01 7.91 4.60 7.14 3.33
Lower Limit 19.19 23.72 7.86 12.07 26.10 29.54 18.17 20.52
Bootstrap Point Estimate 26.72 27.07 14.02 14.62 30.28 31.84 21.76 22.19
Upper Limit 34.25 30.42 20.18 17.18 34.45 34.14 25.35 23.86
Length 15.06 6.70 12.32 5.11 8.35 4.60 7.18 3.34
22

Figure 1: Histogram for Danish fire losses with values less than 70 (millions of Danish Krone).
0 10 20 30 40 50 60
0200
400
600
800
Loss value
Frequency
The point estimates of the influence function method and the bootstrap method for
VaR1−p and CTE1−p are exactly the same and given by the following moment estimates:
VaR1−p := X(dn(1−p)e), and CTE1−p :=1
n− dn(1− p)e+ 1
n∑i=dn(1−p)e
X(i),
whereX(i)
ni=1
are the order statistics of the loss data and⌈·⌉
denotes the ceiling function.
For the SAEL method, the associated point estimate is a root of the equation (Qin and
Lawless (1994)): n−1∑n
i=1 ψh (Xi;µ, η) = 02, with ψh(·;µ, η) given in equation (7) and 02
denoting a two-dimensional null vector. To find such a root, one may employ the standard
scant method and use(
VaR1−p, CTE1−p
)ᵀas an initial guess. We use different bandwidths
that satisfy Condition (3) of Theorem 1 to compute such SAEL-based point estimates and
compare them with the point estimates of the other two counterparts in Table 8. Since
the sample size (n = 2164) is considerably large, the effect of bandwidth h on the point
estimates is not significant as revealed by Table 8. As the bandwidth h becomes smaller, the
point estimate of SAEL is closer to that of the influence function/bootstrap method because
the smoothed estimating equation (ψh(·;µ, η)) reduces to the primal nonsmooth equation
(ψ(·;µ, η)) as h tends to 0, and the moment estimate is a root of such an estimating equation
(Qin and Lawless (1994)). In the following analysis, we fix the bandwidth h = n−1/2 as
commonly used in the literature, see e.g., Chen and Hall (1993).
23

Table 8: Point estimates for (VaR1−p,CTE1−p) of Danish fire data-set.
1− p Influence function/BootstrapSAEL
h = n−1/2 h = n−3/4 h = n−1
0.99 (24.9703, 36.5808) (24.9612, 36.7740) (24.9689, 36.7740) (24.9701, 36.7740)
0.95 (9.3988, 19.2049) (9.4187, 19.2774) (9.4018, 19.2774) (9.3993, 19.2774)
Table 9 reports the confidence intervals of VaR1−p and CTE1−p of the Danish fire
loss data. We have two major comments on the results in Table 9. Firstly, the SAEL
confidence intervals are skewed to the right, whereas the confidence intervals produced by
the influence function method and the bootstrap method are always symmetric. In other
words, the SAEL method prefers to produce conservative estimation of the potential loss,
which is more appealing in the practice from the perspective of regulators. Secondly, the
length of confidence intervals of CTE0.99 can be extremely large (approximately 60 million
Danish dollars), which means that the corresponding point estimates are very volatile under
this case although the sample size is already appreciable. This impressive phenomenon
is probably due to the un-boundedness of the estimating equation ψh(Xi;µ0, η0), which
brings large asymptotic standard deviation of the point estimate and the estimating result
is sensitive to large values in sample. Such an issue is often referred as the robustness in
the statistical literature, and has also raised concern in risk management research (Kou,
Peng and Heyde (2013); Kratschmer, Schied and Zahle (2014)). According to BCBS (2012),
CTE is promoted to replace VaR, however, such a volatile estimate is unacceptable to be
used to set capital requirement.
We further construct the confidence regions for the pair (VaR0.95,CTE0.95)ᵀ based on
the influence function method and our SAEL method. Since the bootstrap method and raw
EL method cannot produce continuous confidence region, we do not take these two methods
into comparison. The produced confidence regions are shown in Figure 2. It is known that
the EL based methods leave the observed data to determine the shape of the confidence
region, and the confidence region tends to be concentrated in places where the density of
the parameter estimator is greatest (Hall and La Scala, 1990). Clearly, the solid contour
curve in Figure 2 is skewed to upper right corner, which confirms the nice property of SAEL
method and shows the heavy tail feature of the underlying loss distribution. On the other
hand, it is well known that the influence function method always produces elliptical-shape
region and it is confirmed by the dash-dot contour curve in Figure 2.
5 Conclusions
In this paper, we propose the SAEL method to construct nonparametric confidence inter-
vals (regions) for three popular risk measures: VaR, CTE and Expectile. We show that the
24

Table 9: Confidence intervals of VaR1−p and CTE1−p at the confidence level of 95% based
on the Danish fire data-set. The parameter (1−p) is chosen to be 0.95 and 0.99, respectively.
Parameter Method1− p = 0.95 1− p = 0.99
Lower Limit Upper Limit Lower limit Upper Limit
SAEL 8.220 11.651 20.981 32.402
VaR1−p Influence Function 8.620 11.402 21.552 30.875
Bootstrap 8.265 11.776 21.093 30.926
SAEL 19.383 33.142 40.314 99.393
CTE1−p Influence Function 17.720 30.443 31.311 85.856
Bootstrap 17.718 30.538 30.690 83.021
Figure 2: 95%-level confidence regions for (VaR0.95,CTE0.95)ᵀ of Danish fire loss data.
0 5 10 15 20
VaR
15
16
17
18
19
20
21
22
23
24
CT
E
Influence Function
SAEL
25

SAEL ratios have chi-square asymptotic distributions, according to which the confidence
intervals for the three risk measures can be constructed. We further disclose that the cov-
erage error of the SAEL confidence intervals for VaR and Expectile can be reduced from
O(n−1
)to O
(n−2
)by Bartlett correction, while the confidence interval for CTE can only
have O(n−1
)coverage precision in general. This gives theoretical support to the advan-
tages of our method over the existing nonparametric methods such as the raw EL method,
the influence function method and the bootstrap method. To the best of our knowledge,
we are the first to clearly analyze the high-order asymptotic properties of nonparametric
inference on these risk measures, which is nontrivial due to the nonsmoothness of estimat-
ing equations. Via extensive simulation studies, we also find that the SAEL method has
overwhelmingly better finite sample performance in terms of empirical coverage probability
than those competing methods.
A Appendix
This section collects the proofs of Theorems 1-5. Their proofs rely on Lemma 1 below,
which quantifies the closeness of the moments of ψh(X1;µ0, η0) and those of ψ(X1;µ0, η0).
ψh(X1;µ0, η0) and ψ(X1;µ0, η0) are respectively defined in (5) and (7).
Lemma 1. If E|X| <∞ and the first-order derivative of the distribution function of X ex-
ists in a neighborhood of µ0 and is positive at µ0, then Eψsh(X1;µ0, η0) = Eψs(X1;µ0, η0)+O(h2) for s = 1, 2, where ψs(X1;µ0, η0) denotes the sth component of ψ(X1;µ0, η0).
Proof. Since the case of s = 1 has been shown by Chen and Hall (1993), we only need prove
the case of s = 2, i.e., E[XGh(X − µ0)] = E[XI(X − µ0)] +O(h2). It can be verified that
E[XGh(X − µ0)] =
∫ +∞
−∞
∫ +∞
−∞xI(x− µ0 − uh)dFX(x)
K(u)du
=
∫ +∞
−∞v(uh+ µ0)K(u)du,
where v(y) =∫ +∞−∞ xI(x− y)dFX(x). For the integrand in the above display, we use Taylor
expansion to obtain
v(uh+ µ0)− v(µ0) = v′(µ0)(uh) +1
2v′′(τ)(uh)2,
where τ depends on uh and lies between µ0 and µ0 + uh. Since E[XI(X −µ0)] = v(µ0), we
arrive at
E[XGh(X − µ0)] = E[XI(X − µ0)] +h2
2
∫ +∞
−∞v′′(τ)u2K(u)du,
26

where the property in equation (6) of the kernel function is applied. It remains to quantify
the remainder term in above equation. Because the support of K is finite and compact and
v′′(τ) = −f(τ)− τf ′(τ), it follows that∫ +∞−∞ v′′(τ)u2K(u)du is bounded and the remainder
term is O(h2). This completes the proof.
A.1 Proof of Theorem 1
Proof. The result in equation (8) is from Theorem 3.2 of Chen and Hall (1993). We only
need to prove (9) and (10). Let Vh be the variance matrix of ψh(Xi;µ0, η0). It can be shown
that Vh = V +O(h), where V = (V ij)1≤i,j≤2 and
V 11 = p(1− p) +O(h), V 12 = η0(1− p) +O(h)
V 22 = (1/p2)EX2I(X ≥ µ0) − η20 +O(h).
Because EX2I(X ≥ µ0) − pη20 > 0, V is non-singular and so is Vh as h → 0 with
probability tending to 1.
Let Zi = ψh(Xi;µ0, η0). By Lagrange’s multiplier method (See Qin and Lawless, 1994),
it can be shown that if SEL2(µ0, η0) is well defined, then
SEL2(µ0, η0) = 2
n∑i=1
log(1 + λᵀhZi),
where λh is the solution ton∑i=1
Zi1 + λᵀhZi
= 0. (26)
With similar argument to the proof of Theorem 3.1 in Chen and Hall (1993), we can
conclude that λh = Op(n−1/2 +h2) in view of the condition E[X2] <∞. By approximating
equation (26), we have
λh = V −1h
1
n
n∑i=1
Zi +Op(n−1/2 + h2)2
and accordingly the likelihood ratio can be approximated as
SEL2(µ0, η0) =
(n−1/2
n∑i=1
Zi
)ᵀ
V −1h n−1/2
n∑i=1
Zi +Opn(n−1/2 + h2)3.
It can be shown that
E(√nZi) = O(
√nh4) = o(1)
under the assumption nh4 = o(1), and accordingly, the application of central limit theorem
leads to n−1/2∑n
i=1 Zid−→ N(0, V ), which implies SEL2(µ0, η0)
d−→ χ22. This proves the
result in equation (9).
The result in equation (10) can be proved along the same lines of the proof of Corollary
5 of Qin and Lawless (1994), and thus omitted.
27

A.2 Proof of Theorem 2
Proof. We shall only prove equation (14), because equation (13) is the result of Theorem
4.1 of Chen and Hall (1993).
For i = 1, 2, . . . , n, denote Yi ≡ (Y 1i , Y
2i )ᵀ := V
−1/2h ψh(Xi;µ0, η0), where Vh is the
variance matrix of ψh(Xi;µ0, η0). Let Br = (1/n)∑n
i=1 Yri , βr = E(Y r
1 ) and for k > 2
βj1j2···jk = E(Y j11 Y j2
1 · · ·Yjk
1 ), Bj1j2···jk =1
n
n∑i=1
Y j1i Y j2
i · · ·Yjki − β
j1j2···jk ,
where j1, j2, . . . , jk ∈ 1, 2. It can be verified that βr = O(h2) and Br = Op(n−1/2 + h2).
It follows from
‖ψh(x;µ0, η0)‖ ≤√
1 + (x2/p) + η0 ≤ (|x|/p) +√
1 + η0,
that if E|X|s < ∞, then both E‖ψh(Xi;µ0, η0)‖s and E‖Yi‖s are finite. Accordingly, for
k > 1, if E|X|2k <∞, then Bj1j2···jk = Op(n− 1
2 ) and βrs = δrs with δrs being 1 if r = s and
0 otherwise.
In the proof of Theorem 1, it has been shown that the solution to (26) satisfies λh =
Op(n−1/2 + h2). Further, by DiCiccio et al. (1991), λh can be expanded as
λh = λh1 + λh2 + λh3 +Op((n−1/2 + h2)4)
where λrh1 = Br, λrh2 = −BrsBs + βrstBsBt and
λrh3 = BrsBtuBu +BrstBsBt + 2βrstβtuvBsBuBv
−3βrstBtuBsBu − βrstuBsBtBu.
Here we have used the summation convention according to which, if an index occurs more
than once in an expression, summation over the index is understood. For k = 1, 2, 3,
λhk = Op(n−1/2 + h2)k.Substituting λh into the expression for SEL(µ0, η0), we have
SEL2(µ0, η0) = nRᵀR+Op(n(n−1/2 + h2)5)
where the sign root R = R1 +R2 +R3 with Rr1 = Br, Rr2 = 13β
rstBsBt − 12B
rsBs, and
Rr3 =3
8BrsBstBt − 5
12βrstBtuBsBu − 5
12βstuBrsBtBu
+4
9βrstβtuvBsBuBv +
1
3BrstBsBt − 1
4βrstuBsBtBu.
Clearly R is a polynomial of U = (B1, B2, ..., B111, ..., B222). The assumption E[|X|18
]<∞
guarantees that U has finite first 6 cumlants. After lengthy algebra, it can be found that the
third-order cumulants of√nR is of order O(n−1/2h2) and that the fourth-order cumulants of
28

√nR is of order O(n−1h2). Under condition n3h4 = o(1), this guarantees that SEL2(µ0, η0)
is Bartlett correctable (Chen and Wood, 1996). The Bartlett correction factor is the leading
term of n E(nRᵀR)− 2 /2, which is equal to
b =1
2βiijj − 1
3βijkβijk.
By Lemma 1, b = b2 +O(n−1
). This proves equation (14).
A.3 Proof of Theorem 3
Proof. We carry those notations used in the proof of Theorem 2, and we further define
Yn+1 = − an
∑ni=1 Yi. Then, applying the Lagrangian multiplier method, we can easily verify
that
SAEL2(µ0, η0; a) = 2n+1∑i=1
log(1 + λᵀhaYi)
with λha being the solution to
n+1∑i=1
Yi1 + λᵀhaYi
= 0. (27)
The rest proof is the largely same as that of Theorem 1 of Liu and Chen (2010), except
that Lemma 1 will be extensively used here. To save lines, we only present a sketch in the
rest of the proof.
By comparing equations (26) and (27), we shall obtain
λha = (1− a/n)λh +Op((n−1/2 + h2)4).
Substituting this approximation to SAEL2(µ0, η0; a) and matching the approximation of
SEL2(µ0, η0), we find that
SAEL2(µ0, η0; a) = nRᵀaRa +Op(n(n−1/2 + h2)5)
where Ra = R− (a/n)R1. Under the assumption n3h4 = o(1), the additional term (a/n)R1
is of order Op(n−3/2), and it is so small that the leading terms of the third and fourth
cumulants of Ra are of the same order as those of R. This implies that SAEL2(µ0, η0; a) is
also Bartlett correctable. By taking expectation, we have
E(nRᵀaRa) = E(nRᵀR)− 2aE(Rᵀ
1R1) +O(n−2
)= 2 +
2b2n− 4a
n+O
(n−2
).
This implies that the Bartlett correction factor accompanying SAEL2(µ0, η0; a) is b2 − 2a.
When a = b2/2, the smoothed AEL SAEL2(µ0, η0; a) calibrated by χ22 has the same precision
as the Bartlett-corrected smoothed EL SEL2(µ0, η0). If a = b2/2 + Op(n−1/2
), we achieve
the same conclusion by re-studying the above proof. This proves equation (19).
29

A.4 Proof of Theorems 4 and 5
Proof. The proofs of Theorems 4 and 5 are very similar to those of Theorems 1, 2 and 3.
Hence we only outline the proof of Theorem 4. Similar to the proof of Theorem 3, it can
be shown that
SAEL3(η0; a) = SAEL3(η0)− 2aR1∗R1∗ +Op(n(n−1/2 + h2)5)
= SAEL3(η0) +Op(n(n−1/2 + h2)2).
Then along the proof of Corollary 5 of Qin and Lawless (1994), we shall conclude that
Pr(SAEL3(η0; a) ≤ x) = P (SEL3(η0) ≤ x) +O(n−1
)= P (χ2
1 ≤ x) +O(n−1
).
This proves Theorem 4.
References
Abu Bakar, S.A., Hamzaha, N.A., Maghsoudia, M. and Nadarajah, S. (2015). Modeling
loss data using composite models. Insurance: Mathematics and Economics, 61, 146–
154.
Ahn, J. and Shyamalkumar, N. (2014). Asymptotic theory for the empirical Haezendonck-
Goovaerts risk measure. Insurance: Mathematics and Economics, 55, 78-90.
Baysal, R.E. and Staum, J. (2008). Empirical likelihood for value-at-risk and expected
shortfall. Journal of Risk, 11, 3–22.
BCBS (2012). Consultative Document May 2012. Fundamental review of the trading book.
Basel Committee on Banking Supervision. Basel: Bank for International Settlements.
Bellini, F., Klar, B. Muller, A. and Gianin, R. (2014). Generalized quantiles as risk
measures. Insurance: Mathematics and Economics, 54, 41–48.
Chen, S. X. and Cui, H. J. (2006). On Bartlett correction of empirical likelihood in
presence of nuisance parameters. Biometrika, 93, 215–220.
Chen, S. X. and Hall, P. (1993). Smoothed empirical likelihood confidence intervals for
quantiles. The Annals of Statistics, 21, 1166–1181.
Chen, S. X. and Tang, C. Y. (2005). Nonparametric inference of Value-at-risk for depen-
dent financial returns. Journal of Financial Econometrics, 3, 227–255.
Chen, S. X. (2008). Nonparametric estimation of expected shortfall. Journal of Financial
Econometrics, 6, 87–107.
Chen, J., Variyath, A. M., and Abraham, B. (2008). Adjusted empirical likelihood and
its properties. Journal of Computational and Graphical Statistics, 17, 426–443.
30

Cooray, K. and Ananda, M.M. (2005). Modeling actuarial data with a composite lognormal-
pareto model. Scandinavian Actuarial Journal, 2005 (5), 321–334.
DiCiccio, T. J., Hall, P., and Romano, J. P. (1991). Empirical likelihood is Bartlett-
correctable. The Annals of Statistics, 19, 1053–1061.
Dowd, K. (2005). Estimating risk measures. Financial Engineering News, 43, 13.
Hardy, M. (2000). Hedging and reserving for single-premium segregated fund contracts.
North American Actuarial Journal, 4, 63–74.
Hall, P. and La Scala, B. (1990). Methodology and algorithms of empirical likelihood.
International Statistical Review, 58, 109–127.
Jones, B.L. and Zitikis, R. (2003). Empirical estimation of risk measures and related
quantities. North American Actuarial Journal, 7, 44–54.
Kou, S., Peng, X. and Heyde, C.C. (2013). External risk measures and Basel accords.
Mathematics of Operations Research, 38(3), 393-417.
Kratschmer, V., Schied, A. and Zahle, H. (2014). Comparative and qualitative robustness
for law-invariant risk measures. Finance and Stochastics, 18, 271–295.
Liu, Y. and Chen, J. (2010). Adjusted empirical likelihood with high-order precision. The
Annals of Statistics, 38, 1341–1362.
Manistre, B. J. and Hancock, G. H. (2005). Variance of CTE estimator. North American
Actuarial Journal, 9, 129–154.
McNeil, A. (1997). Estimating the Tails of Loss Severity Distributions Using Extreme
Value Theory. ASTIN bulletin, 27, 117–137.
Nadarajah, S., and Bakar, S. (2014). New composite models for the danish fire insurance
data. Scandinavian Actuarial Journal, 2014 (2), 180–187.
Newey, W., and Powell, J. (1987). Asymmetric least squares estimation and testing.
Econometrica, 55, 819–847.
Owen, A. B. (1988). Empirical likelihood ratio confidence intervals for a single functional.
Biometrika, 75, 237–249.
Owen, A. B. (1990). Empirical likelihood ratio confidence regions. The Annals of Statis-
tics, 18, 90–120.
Owen, A. B. (2001). Empirical Likelihood. Chapman and Hall/CRC, New York.
Peng, L., Qi, Y., Wang, R. and Yang, J. (2012). Jackknife Empirical Likelihood Method for
Some Risk Measures and Related Quantities. Insurance: Mathematics and Economics,
51, 142–150.
Qin, J. and Lawless, J. (1994). Empirical likelihood and general equations. The Annals
of Statistics, 22, 300–325.
31

Scollnik, D.P. and Sun, C. (2012). Modeling with weibull-pareto models. North American
Actuarial Journal, 16 (2), 260–272.
Tan, K. S. and Weng, C. (2014). Empirical approach for optimal reinsurance design.
North American Actuarial Journal, 18 (2), 315–342.
Yamai, Y. and Yoshiba, T. (2002). Comparative analyses of expected shortfall and value-
at-risk: Their estimation error, decomposition, and optimization. Monetary and Eco-
nomic Studies, 21, 87–121.
Zhou, M. and Yang, Y. (2016). emplik: Empirical likelihood ratio for censored/truncated
data. R package version 1.0-3. URL: https://CRAN.R-project.org/package=emplik.
Ziegel, J.F. (2014). Coherence and elicitability. Mathematical Finance, 26, 901-918.
32
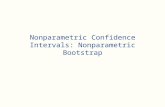







![Efficient Estimation in Expectile Regression Using ...[17] studied the sparse expectile regression under high dimensional settings where the penalty functions include the Lasso and](https://static.fdocuments.net/doc/165x107/5f029c6d7e708231d4052030/efficient-estimation-in-expectile-regression-using-17-studied-the-sparse-expectile.jpg)








