Lightning Mapping Technology & NWS Warning Decision Making Don MacGorman, NOAA/NSSL.

NOAA Technical Memorandum ERL NSSL-76
AN ANAL YS IS OF WEATHER SPECTRA VARIANCE .
IN A TORNADIC STORM
Philippe Waldteufel
National Severe Storms Laboratory Norman, Oklahoma May 1976
UNITED STATES DEPARTMENT Of COMMERCE Elliot L. Richardson, Secretary / NATIONAL OCEANIC AND
ATMOSPHERIC ADMINISTRATION Robert M. White, Administrator /
Property of NWCLibrary
UniPersity of Oklahoma
EnVironmental Research Laboratories Wilmot N. Hess, Director

TABLE OF CONTENTS
LIST OF FIGURES
LIST OF TABLES
ABSTRACT
1.
2.
3.
INTRODUCTION 1.1 Doppler radars and Doppler spectra variance 1. 2 Sunnnary
NSSL DOPPLER RADAR FACILITY AND PROCESSING 2.1 Description of radars 2.2 Operating modes 2.3 Data processing and storing
FACTORS AFFECTING DOPPLER SPECTRUM WIDTH 3.1 A list of broadening factors 3.2 Assessment of variance contributions 3.3 Discussion
4. DOPPLER SPECTRUM, VARIANCE, SHEAR AND TURBULENCE 4.1 Space velocity spectra and pulse filtering 4.2 Isotropic turbulence hypothesis
5.· MAXIMUM LIKELIHOOD PARAMETER ESTIMATOR 5.1 Rationale for implementation 5.2 General description and assumptions
6. FIRST RESULTS AND TECHNICAL IMPLICATIONS 6.1 Data anomalies 6.2 Quality of June 8 data
Page
vi
ix
x
1
3
5
10
14
16
7. NON-TECHNICAL BROADENING FACTORS 18 7.1 Bi-moda1 spectra; side10be relationship 7.2 Other broad spectra
8. ANALYSIS OF JUNE 8, 1974 NSSL DUAL-DOPPLER VARIANCE FIELDS 21 8.1 Outline of analysis
9. RESULTS IN A COPLANE FRAME 23 9.1 Spectrum standard deviation comparisons 9.2 Radial shear versus spectrum width
10. ANALYSIS IN A CARTESIAN FRAME 27 10.1 T~rbu1ent dissipation coefficient compared to shear terms 10.2 Turbulent energy dissipation and atmospheric energetics
11. CONCLUSIONS 34
iii

12. ACKNOWLEDGMENTS
13. REFERENCES
ANNEX A: MAXIMUM LIKELIHOOD PARAMETER ESTIMATION FROM NOISE DATA: APPLICATION TO GAUSSIAN STATISTICS AND TO WEATHER RADAR
Page 3·5
36
DOPPLER SPECTRA 38
A.l General Description: Case of Gaussian Statistics A.l.l Principal
A.l.l.l Problem Statement A.l.I.2 Bayes' Rule A.I.I.3 Maximum likelihood (M.L.) equations A.I.I.4 Gaussian statistics case
A.I.2 Implementation A.I.2.1 The iterative linearization algorithm A.l.Z.2 Variance of the estimates A.I.2.3 Case of Gaussian statistics A.I.2.4 The iterative gradient algorithm
A.2 Application to Weather Radar Doppler Spectra A.2.l Exponential statistics
A.2.2 Implementation A.2.2.1 Parameters and fitting function A.2.2.2 Initial value estimation A.2.2.3 Algorithm
A.2.3 Technical Results A.2.3.1 Convergence efficiency - computing cost A.2.3.2 Accuracy of estimates A.2.3.3 M.L. versus standard estimated values A.2.3.4 Signal-to-noise ratio considerations
. ANNEX B: THE TIME WINDOW
B.l Definition and ?roperties
B.2 Numerical Results for Rectangular Time Window B.2.l Window width as a function of time series length
B.2.2 Independent frequency sampling
B.2.3 Apparent window noise and signal-to-noise ratio
B.3 Window Convolution
B.A Window Broadening Reduction B.4.1 Band limiting
iv
57

B. 4 :'2 Thresholding
B.4.3 Window correction
B.S Conclusion
ANNEX C: ' NORMAN ANTENNA PATTERN MEASUREMENT .
C.l Experiment
C.2 The Calibration Runs
C.3 The Radiation Pattern
C.4 Sidelobe Effects Assessment
C.S Conclusion
ANNEX D: RESULTS FOR REFLECTIVITIES AND VERTICAL VELOCITIES
D.l Coplane Reflectivity Fields
I D.2 Cartesian Reflectivity Fields
r ·f
r I "?; i J I
I· ,I / I
I r !
" ,
D.3 Vertical Velocities
v
Page
69 .
77

LIST OF FIGURES
Figure
1. Photography of the incoherent WSR-57 Norman radar display on June 8, 1974. Markers are 40 km apart. Also shown (dashed line) is the Norman Doppler radar unambiguous range limit.
2. Example of a very broad, multimodal spectrum recorded at NRO on June 8, 1974 and surrounding spectra. Also shown are signal-to-n()ise ratios and mean velocities for each gate.
3. Geometry of dual-Doppler network showing areas processed on June 8 and the coplane and Cartesian grid ground traces.
4. Maps of spectrum width contours (m s-l) for NRO at 50 coplane before, (a) and after, (b), removal of shear contribution. Axes are parallel to the sides of the dashed square on Fig. 3; point 0 is, -as in Fig~13, the center of this square._1Code 0 are widths 0 to 1 m s ; Code 1 are width 1 to2 m s , etc.
5. Values of correlation coefficient C between NRO and eMF fields for width cr and dissipation rate E, before and after correction f9r shear, at each coplane angle. Also shown is the mean E .
(corrected) value over both radar fields.
6~ ' Correlation coefficient between spectrum width (corrected for shear) and shear itself, for NRO and CMF and NRO-CMF field, at each coplane angle.
7. a) CQrrelation coefficient, C, between dissipation coefficient E for NRO and various shear related quantities Tk
L 2 L: 2 I: D3j 2
Tl = Dij T2 = Dij T3 = i=1,3 i=1,3 j=1,2 j=1,3 j=1,2
T4 D33 2 T· = I.: .Di3
2 = 5 i=1.,2
b) Correlation coefficient, C, between dissipation coefficient E for NF~ and various shear related quantities Tk
T = I: D •• 2 T7 6 i=1,2 1J
j=1,2
T9 I: Sij 2 TlO =
i=1,3 j=1,3
= (D12 - D2l)2
I: S· . 2 = ·i=1,3
1.J
j=1,3 i;'j
vi
T = 8 I: ij=12
23 31
2 (D .• -D . • )
1.J J1
19
20
22
24
25
26
28
28

( (
Figure
8.
9.
10.
Al.
A2.
A3.
Altitude .variation of: a) E mean value and standard deviation; b) (Tic> i. /2 mean values, k = 1 to 5; and c) Tkl /2, k = 6 to 10.
Maps in t;he horizontal H = 5 k.m plane of: a) E for NRO and b) {Tk)1I2 as defined in Fig. 7 ,expressed in 10-:5 s..,.l units.
Altitude 'variation of A and ~, total and horizontal mean flow kinetic energy advections.
Example of weather spectrtim fltted by M.L. estimator. Note generally small scatter compared to standard deviation predicted from eXponential statistics. Power density scale is logarithmic.
Convoluted Gaussi~n curves stored in the library for M.L. spectrum estimation, for selected normalized variance values. d , standard deviationlif true Gaussian, is in line spacing
e -units (i.e., 1.07 m s ); the abscissa is in 0e units.
Double histogram of S.D. (~) versus 6 for, a) low, and b) high, signal-to-noise p& values. Dashed curve on 3b is after Berger and Groginsky (1973). The contoured quantity is t~r density of cases per _frid elementl grid spacings [0.\25 m s for 6 and 0.06 m s for S.D. (v)] are indicated on figure.
A4. Same as Fig. A3 for S.D. (6) versus 6.
30
3J .
34
47
48
52
53
A5. Double histogram of M.L. estimated 6M L against pulse pair estimated 6 spectrum widths. • • 54
pp
A6. Absolute difference between initial guesses and M.L. final estimates for velocity and standard deviation.
A7. Absolute ~oise level dif'{erencesin dB obtained from M.L. estimation of bimodal spectra.
A8. Signal-to-noise ratio from spectrum power P and from the incoherent receiver p (double histogram). sContinuous line is p = p. Dashed l~ne is a prediction accounting for quan~izat~on noise evaluated from noise record time series standard deviation.
Bl. Rectangular time window power spectrum for continuous and discrete (64 line samples) cases.
55
56
56
58
B2. a in oR. units, standard deviation of Bartlett window spectrum width for various numbers of time samples. 60
B3. a) Window broadened Gaussian half spectrum, interpreted as superposition of noise and signal. 61
vii

Figure
B3.
B4.
Cl.
C2.
C3.
C4.
C5.
Dl.
D2.
D3.
b) Half spectrum of narrow window broadened Gaussian spectrum centered 0.4 o~ away from the nearest spectral line. Note total variance is larger than in case (a).
M.L. adjustment of a particular experimental spectrum using a) a Gaussian curve; b) a convoluted Gaussian curve.
Antenna pattern experiment geometry.
Digital Integrator (D. I.) calibration curves during the pattern measurement. Curves are shifted in ordinate by 5 D.I. digits for clarity.
Antenna pattern versus azimuthal angle for source of maximum gain elevation (0.6°). Pattern C obtained 30 min after B. Pattern D. obtained after transmitting horn was moved up about 6 meters. Vertical scale in dB shifted by 10 dB steps for better clarity.
Full pattern measurement result. Data were smoothed using a Shuman 9 point formula. Lines of equal power below maximum are spaced by 6 dB.
Two-way sidelobe returned power per square degree.
Correlation between NRO's AGC numbers I 0' and CMF digital integrator numbers, I • Mean value a~ standard deviation of the difference fie~OI in various coplanes.
Same as Fig. Dl in horizontal planes, except that data fields have been transformed into reflectivity estimates.
a) Map of cross-correlation coefficients (X 100) between NRO and CMF reflectivity fields, in various horizontal planes. The map covers a + 2 log interval along either ,ho:rizontal axis; the log value is 1.5 km.
b) Standard deviation difference field.
D4. Map of vertical velocities obtained in the H = 6kmhorizonta;L plane using estimators described in this paper (top) and the pulse pair estimator (bottom). The origin of axes is the
61
63
69
70
72
73
75
77
78
79
79
middle of radar to radar line. 80
/
viii
. ,

( I ~
I
f I. r f· ii
.. ~ i I !
, j,
I: Ii
I
1.
2.
B1.
B2.
LIST OF TABLES
. NSSL Doppler radar characteristics (1974).
Factors affecting var:f.ance of weather Doppler spectra (variance units are m2 R-2).
Influence of mode location upon window broadening.
Apparent signal-to-noisespectral density ratio . due to the window • .
B3. Bias of variance estimate with bandlimiting (SIN = 00).
B4. Bids of variance estimate with thresholding.
Cl. One way power in dB for below the main lobe contribution for each square degree.
ix
3
11
61
62
65
66
74

A B S T RAe T
Dual-Doppler radar data collected in a tornadic storm during the NSSL Spring 1974 Program is analyzed to obtain spectrum variance. Various causes for spectral broadening are listed and evaluated. A maximum likelihood estimating method allows removal of most of these causes and definition of variances associated with atmospheric motions. The contribution from large scale (shear) wind components is subtracted and the remaining variance field interpreted in terms of turbulent dissipation rate E, under the isotropic turbulence hypothesis.
A correlation is attempted between E and various expressions related to the shear tensor. Little correlation is found with vertical derivatives, but better ones with those quantities involving horizontal derivatives. When taking into account the altitude variations, the highest resulting correlation coefficient is about 0.6 and occurs with horizontal derivatives of the total velocity vector.
Detailed inspection shows actual correlatio.n is better in a portion of the data limited to strong dynamic features. Regions of large turbulence appear elsewhere which do not seem related to any known characteristics of the velocity field.
A poor correlation is found between E fields and the advection of mean flow kinetic energy. Advection is one order of magnitude higher and, probably to a large extent, balanced by temporal variations. When the energy advection fields are averaged, the net energy inflow mean value is nevertheless of the order of E and follows a similar altitude variation.
x
, I

' /
AN ANALYSIS OF WEATHER SPECTRA VARIANCE IN A TORNADIC STORM
Philippe Waldteufell
1. INTRODUCTION
. 1.1 Doppler radars and Doppler .spectra variance
For several tens of years, weather radar has been a major meteorological tool for short term forecasting and describing sub synoptic or mesoscale phenomena. Since the late sixties, the coming of age of weather radars with Doppler capability provides the meteorologist with a qualitatively different device. Knowledge of velocity fields is a major asset, particularly for understanding the behavior of storm systems, and it is likely that major advances in this field will be associated with Doppler radar studies. General appreciation of Doppler radar promise, is reflected in an increasing number of papers on velocity fields in weather precipitation systems.
The Doppler spectrum variance (its square root will be called here standard deviation or, more loosely, spectrum width), also enjoys substantial meteorological interest and it is with the width that this work principally · is concerned. Many technical or physical causes may be associated with broadening of Doppler spectra. Most, in principle, can be either neglected or accounted for; eventually the only contribution to spectrum width left unknown is broadening by small scale atmospheric motions.
Under certain assumptions, this broadening can be related to the turbulent dissipation coefficient; this allows us to determine a· potentially important contribution in the atmospheric energy balance. Such a prospect appears particularly promising in meteorological situations where strong turbulence is known to happen. This is, indeed, the case in the severe storms of U.S. Middle Southwest, America. The radar system operated by National Severe Storms Laboratory (NSSL) in central Oklahoma, Norman, principally is devoted to gathering data concerning severe storms; therefore it seems appropriate to analyze these data for spectrum width information. This is, all the more, of interest because width estimates are available from two radars; comparing two independent width fields observed from different angles, one should obtain some idea o£ turbulence isotropy extent.
Thus, the basic aim of this ·study was to undertake an analysis of width data from the NSSL dual-Doppler radar system and to infer whatever could be inferred about atmospheric turbulence in a severe storm. This investigation was complicated, however, from the very beginning because various algorithms used to estimate the spectrum width showed systematically large values, large in the sense that it seemed very difficult to account for them using figures
~r. Waldteufel conducted this important study at NSSL during the six months from July through December l~74, while on leave from tne Centre National d'Etudes des Telecommunications, I58Y Les Molineaux, France, where he is Maitre de Recherche.

currently accepted for spectral broadening factors. Therefore, the course of the study had to be reformulated: first, identify the causes of large width estimates; next, obtain a data sample exempt from or corrected for them, and eventually analyze the widths in terms of their meteorological meaning.
Due to lack of time, this program was not as fully accomplished as could have been hoped. On the other hand, it grew into a number of related technical studies which, although not directly relevant to turbulence, do have a general application in Doppler radar methodology.
1.2 Summary
This text is organized as follows. In ~he next paragraphs, we summarize data of interest; first, the NSSL Doppler radar set-up and processing are described; next, possible causes for broadening of weather spectra are evaluated. Finally, we recall briefly how and under which assumptions one component of the spectrum variance may be related to the turbulent dissipation rate.
Sections five through seven deal with those analysis steps required to extract, from Doppler data, width contributions associated with atmo~pheric motions. It is found useful to develop a Maximum Likelihood (M.L.) estimating technique (described in detail in Annex A). Also we had to investigate the effect of the finite data sample length (time window); this forms the subject of Annex B.
A first application of the M.L. technique mainly confirmed and assessed the anomalies already supposed to be present in Doppler spectra; that is, a very high noise level and unrealistically large variance values, often associated with bimodal spectra. A considerable time was spent trying to understand the reasons for this, and after ruling out every possible natural cause, it had to be concluded the problem lies with the radar itself. A critical analysis of data quality was thus carried. out, helped by the development of adequate computer programs. Anomalies in the data were eventually found to originate in a faulty analog-to-digital conversion (NSSL Memorandum for the record, October 31, 1974).
Quality check programs are used . to scan throughout 1974 observations; it is concluded that in most cases, while these defects result in severely damaged width estimates, they do not affeGt mean velocities significantly. Bimodal spectra evidence from Norman data distinctly points to some cases of interference with range ambiguous echoes or sidelobe returns; the latter are investigated with the aid of a detailed antenna pattern measurement (reported in Annex C).
Sections eight through ten describe an analysis of spectrum width fields interpreted in terms of turbulent dissipation coefficients. A number of comparisons between width fields and fields related to the dynamic features of~ the storm 'are carried out and an attempt is made to evaluate the impact of turbulent dissipation. on energetics of the mean flow.
2

I
{ i
I \ I'
r
l I I !
Results concerning reflectivities and vertical velocities are reported in Annex D.
The author would like to build a case for the Annexes~ More often than not, ~nnexes are a place where clumsy algebra is found, while any interestihg result is kept in the main text. This is not fully the case here: not only do the Annexes contain little algebra (except in the beginning of Annex A), but they do contain hard facts and results that might be of interest and are not found always in the text. \
2. NSSL DOPPLER RADAR FACILITY AND PROCESSING
2.1 Description of radars
Two nearly identical Doppler radars are operated by NSSL. One is located at the Laboratory site, Norman (Oklahoma), and the other 41.4 km ~orthwest (309.9°) of Norman at Cimarron Airfield (Oklahoma City, Oklahoma). They are referred to as NRO and CMF.
Table 1 gives their characteristics for 1974 Spring 'season observations.
TABLE 1. NSSL Doppler Radar Characteristics (1974)
PARAMETER
Antenna Shape Diameter Half-Power Beam Width Gain First Side Lobe Level Polarization RMS Surface Deviation
CIMARRON
Parabolic 9.15 in 1.80" 46 dB 21 dB Horizontal 2.5 1IDD
Transmitter Wavelength Frequency Pulse Repetition Time Pulse Width
10.94 cm 2741 MHz
,,;,.f· 76'8 llsec
Peak power
Receiver System Noise Figure Transfer Function
Dyriamic Range Band Width (3 dB) Intermediate Frequency Min. Detectable Signal (S/N=l) '
Doppler Time Series Data Acquisition No. of Simultaneous Range Gates No. of l6-gate Blocks Along Radial Range Gate Spacing Azimuthal Sample Spacing Automatic Elevation Increment Number of Samples in Time series
1 llsec (150 m) 500 kW
4.1 dB Doppler - linear Intensity - logarithmic 70 dB 2.8 MHz 30 MHz -105 dBm
16 Unlimited 300, 350, •.. 1200, 1350 m 0.1 to 9.9 deg 0.5 to 9.9 deg 2n
n = 1, 2, .•. , 13 Complex Video Digital Word Length 10 bits (binary)
3
NORMAN
Parabolic 9.15 m 0.81 deg 46.8 dB 2~ dB Vertical 2.8 mm
10.52 cm 2850 MHz 768 llsec 1 llsec (150 m) 750 kW
3.3 dB Doppler - linear Intensity - logarithmic 70 dB 1.2 MHz 30 MHz -108 dBm
16 8 150, 300, 600, 1200 m 0.1 to 9.9" 0.1 to 9.9" 2n
n = I, 2, •.. , 13 10 bits (binary)

The radar has two receiving channels after the mixer-preamplifier:
a) Logarithmic Channel: The I.F. signal is logarithmically detected; detected power is converted to digital 6 bit numbers in 512 adjacent range gates, spaced by 1.4 IlS (210 m). Numbers for each gate are averaged in a digital integrator using either a uniform weight applied to a finite number of pulses or an exponential function. Usually exponential weighting with 50 mil1isec time constant is selected for this digital integrator (DI).
S) Doppler Channel: The I.F. signal goes through a variable gain amplifier located in an automatic gain control loop (AGC) and then is mixed to two waves in quadrature in ' order to obtain the base band complex signal. This signal is digitized by a 9 bit + sign AID converter and the digital numbers are stored for recording later. There are 16 Doppler gates simultaneous1yavai1ab1e, spaced by either 2, 4, or 6 11S (300, 600, or 1200 m). During regular operations, 64 complex numbers are recorded for -each gate.
Before the time series data collection begins, digital numbers from the _ DI gates nearest in range to each Doppler gate are selected and stored in a special memory. These 6 bit numbers -then are converted back into voltages which are used to drive the AGC amplifier. The AGC setting is not modified during the next (64 samples) Doppler data collection period. The Doppler gates may be stepped out in range as a whole so as to provide the requested range coverage. Thus, a typical data tape contains a sequence of DI records separated by several (usually 5 to 8) Doppler records. Housekeeping information is included in every record.
2.2 Operating modes
Measurements by each radar consist of successive sectorial scans for increasing elevation values. The angular spacing usually is 1 or 2 degrees in azimuth, 1 degree in elevation. A measurement throughout the entire volume of a storm -(10 elevations typically) lasts about 5 minutes and takes the best part of a magnetic tape for 20000-:30000 sample points in space.
2.3 Data processing and storing
The Doppler data are processed in parallel using two different estimators.
a) "Fourier" _processing: the time series are transformed into power spectra using a FFT algorithm (rectangular time window, uniform weighting). One then computes the first and second spectral moments, leading to mean velocity and width estimates. In these computations, the spectral 'components are thresho1ded to a level 4epending on the signal-to-noise ratio.
S) "Pulse-pair" processing: mean velocity and variance are estimated using the pulse pair algorithm formalized by Rummler (1968) and Berger and Groginsky (1973). The width computation includes elimination of uncorre1ated noise. -
4

-,---------------,--------- -
For every experiment the equipment is calibrated by means of a signal generator. The calibration curve is used to generate reflectivity values from the DI records, and also to provide signal-to...,noise ratio for .bias removal in the pulse pair variance estimator.
Results of these computations are recorded on an archive tape.
This summarizes the characteristics of NSSL Doppler radars hardware and processing, relevant to this study. Fur~her details will be found in what follows whenever necessary to full understanding.
3. FACTORS AFFECTING DOPPLER SPECTRUM WIDTH
We first list various broadening causes which have been encountered; next describe and evaluate them briefly; finally, discuss how their effects are compounded.
3.1 A list of broadening fqctors
The order in which this list is given is somewhat arbitrary, since several sorting criteria rightly may be considered. Specifically, the grouping chosen here depends partly on where the causes originate, .and partly on the nature of resulting effects, according to what seemed essential.
Meteorological factors: 1. Finite width velocity distribution of scatterers 2. Atmospheric motions on scales smaller than the sampled
volume size 3. Atmospheric motions on scales larger than this size
Inherent measurement bias and uncertainties: 4. Beam broadening 5. Antenna rotation broadening 6. Uncorrelated receiver noise 7. Statistical uncertainty
Extraneous factors: 8. Non-weather related (e.g., ground clutter, non-meteorological
targets aloft, external transmitters) 9. Weather related (e.g., sidelobe and ambiguous range returns)
10. Equipment related (imbalances, offsets, non-linearities, etc.) 11. Data processing factors (e.g., aliasing, window broadening,
biases due to processing techniques)
Note that while some of these factors [all of (a), all of (b), plus some of (c)] contribute to broaden a given spectrum, the others generally resuit in a spurious spectral mode. This, possibly, would have been the key for an alternate classification.
3.2 Assessment of variance contributions
(1) Due to precipitation particles having a polydisperse size distribution, and fall speeds increasing with size, the spectrum of precipitation
5

return in still air has a finite width~l Unless large hail is present, the associated width does not exceed 1 m s (Atlas, Sekhon, and Srivastava, 1973). For low (9 < 12°) elevation angles utilized in dual-Doppler experiments, this contribution becomes negligible.
(2) Small scale motions are discussed in the next section. Th~l associated width is generally thought not possible to exceed 4.5 m s
(3) Large scales atmospheric motions come in through mean of the shear of radial velocity throughout the sample volume. The corresponding spectrum variance 0 2 is (after Sirmans and Doviak, 1973):
s
(1)
where 81
is the one-way 3 dB antenna beamwidth in r~dians, h is the pulse resolut1on (m), ~ and Ku are shear coefficients (s 1) for the radial velocity transverse to and along the beam axis, and R is the radar range (m). For the NSSL Doppler radars (see Table 1) this g.ives:
o s 2
.' -2 -1 For typical maximum observed shear values (Kr = 3X10 , s ~ 50 km range in the dual-Doppler area, we obtain 0S2= 45 m radial 'shear effect always is less than 0.5 m2 s'-2.
(2)
and a typical -2 s • Note the
(4) Beam broadening corresponds to the small radial components due to finite beamwidth even though velocity V is transverse to the beam axis. This gives a va~iance 0b 2
:
= 0.09 9 2 V2 1
always found smaller than 0.05m2 s-2 in cases considered here (for V = 50 m s-l)~
(3) .
(5) Antenna rotation makes the spectrum broader because ' spatial changes in t;he sample volume ~uring Doppler data acquisition partially destroy the ~ohetencI o~ Feather return~. The computed resulting variance (Nathanson, 1969) 0 . is: , ex
(4)
6

where ~lis the .wave length (m) and a. is the antenna rotation velocity (rad s ). In our case,a. is normally 2° s-l and we get:
-2 s
/
(6) Uncorrelated receiver noise, if not properly subtracted, contributes · to the variance. Assume the velocity spe.ctrum contains the signal power density . S(v) and another function .N(v) of frequenci' with int¢gratedpowers Ps and PN, mean velocities Vs and ·VN, variances as and aN
2• For the total
power density curve C=S+N, we get:
(5)
(6)
with
8 = Ps =
If N(v) is uniform spectral noise, the integrated power signal-to-noise ratio is p :
s
s = Ps
P + 1 s
and the width estimate with noise alone is 19.7 m s-l signal-to-noise ratio (p = 10), then:
s
Assume a 10 dB
a 2 C
, - 2 0.91 a
s2 + 35.5 + 0.09 Vs
2 -2 m s
Thus, the signal plus noise spectral width can conceivably be much larger than a 2
s
(7) Statistical uncertainties of course, may alter the width estimates in either direction. Berger and Groginsky (1973) have computed standard
7

deviation S.D. [6] of the spectrum width estimate, 6, assuming a ,Gaussian spectral shape, and find, for very large signal-to-noise ratios and at < (27T) -1:
A
S.D. [a] = ( 3 ) a 1/2 32v"if N t (7)
where 6 and at are normalized to the whole unambiguous velocity range, N is the number of samples and a is true spectrum width. For NSSL Doppler , t radars, assuming N = 64, th~s gives:
A
S.D. [aJ _ 0.238 (a )1/2 t
where_fhis time S.D. [6] and at are in m2s-l • For ~ tl~ical value at =
2 m s , S.D. [6]=.336 m s-l and S.D. [6 ] = 1.35 m s •
(8)
(8) We come now ' to the category of extraneous factors: (a) ground clutter should be considered for low elevation when velocities seem biased abnormally toward small absolute magnitude values; (b) other than meteorological targets aloft (e.g., aircraft) are not likely to be frequent in a severe storm environment; (c) external transmitters do not seem a problem in the, NSSL area. Note that, except in the hardly possible case of a coherent source near the radar transmitter frequency, this interference will appear as uniform noise rather than a spectral mode.
(9) The influences of sidelobe returns and ambiguous range echoes are negligible most of the time, but in some cases they completely overwhelm the radar signal, including the wanted width estimate. Whenever these spurious spectral contributions can be assessed, the resulting variance is given by Eq. (6). At NSSL, the incoherent low PRF WSR-57 is particularly useful for iange ambiguity detection.
(10) Equipment factors may include offset voltages unduly superimposed on the complex signal (e.g., offset of the A/D converter), and leakages from the 60 Hz power supply. This last phenomenon usually seems completely negligible. Effects on width estimates are computed by using Eq. (6).
Images are due to either amplitude imbalance or erroneous phase shift between both components of the complex signal; some of the power density corresponding to frequencyf then leaks ,to frequency ~f. Images usually appear due to slight imperfections in the analog receiver; in such cases, it is possible to achieve 20-25 dB image rejection rates. Sometimes, however, an image is created through misfunction at digital stages; the image 'rejectioniateihan may drop practically' to 0 dB and even becoine negative.
" " .To a,ssess,this . effect, we ap.E.ly E~ (6) with f3 = P;L/(Pi + 1,) (Pi = image rejection factor) , 0N2 = a/and VN =-V s. This yields: "
8

t, ! 1
/1 i
-,-- - - ,---
(9)
For p. values equal to 0, 10, and ,20 dB" assunang ma:x.imwn velocit~2value V , additIonal variance contributions equal to 1172, 387, and 46, m2 s result~ If Vs = 15 m s-l and Pi = 20 dB, one ,gets a typical value of 8.8 m2 s-2.
Non-linearitiesin the receiver may occur either due to. actual nonlinear behavior of some elements within their regular dynamic range or due to saturation. Saturat:ion is of little consequence in the spectral domain, except when present at the baseband stage, for example, when complex voltage values higher in absolute magnitude than tbe AID ' span are' "hard limited" or clipped. Clipping ',has the effect of generating secondary peaks at odd harmonics of the input frequency, each of these being ,changed sign iri turn and being aliased back in the Nyquist co-interval whenever it exceeds the ' unambiguous frequency limits.
Signal-to-noise ratio decrease due to clipping has been investigated previously (Zrnic and Bumgarner, 1975). Assessing its effect on variance for weather, finite width spectra would require further efforts, possibly including a full scale simulation. Some simple simulations with sine waves indicate for a clipping ratio (real ampl:itude to maximum clipped level ratio), as small as 6 dB, variance contributions from harmonics of the order of 20 m2 s~2 may result.
(11) We arrive at variance introduced through specific estimation techniques. The following are present only when using the spectral (Fourier) moment me.thod.
Aliasing or folding affects the variance when the spectral mod.e is split between both ends of the Nyquist co-interval. Its consequence can be devastating, and amount in the limiting case to the maximum possible width (see image case) equal to 34 m s-l. Even with only a small part of the mode bei~y folded over, contributions computed using Eq. (6) range up to several m s •
Window broadening is the result in spectral domain of the limited time interval during which Doppler data are available. The corres~onding contribution varies, for small as2 ~al~es, between 0 and 10.3 m2 s- , while when as 2 becomes larger than O. 4 m s 2 the window broadening stabilizes at 5.1 m2 s-2 (Annex B).
Width biases are caused by techniques such as band limiting and thresholding, which are applied to diminish or remove some of the broadening effects discussed earlier, such as uncorrelated , receiver noise, images, or window broadening. These techniques are meant to recover the "true" width rather than to add bias or variance. In some cases however, they may overcorrect spurious broaden!~g factors and eventually yield a width underestimated by about a m s (for N = 64 samples).
9

3.3 Discussion
Befo·:re going further, we summarize the information. In Table 2, the many factors affecting variance are characterized by their effect on both estimators (Fourier and pulse pair), by giving in each case, a maximum value, atypical value, and a very short comment when appropriate. Also, possible bias of total power P + PN and/or mean velocity estimate V is indicated. Finally, reference issmade to Annexes of this work wheneverSthe broadening factor has been the object of special attention.
Typical effects of folding and imaging are smaller for pulse pair than for spectral moment estimator. This stems from the fact that the pulse pair estimator, operating in vectors, performs unfolding automatically in order to get the minimum variance. Also, biases are present when the actual spectrum width becomes a non:-negligible fraction of the Nyquist co ..... interval. On the other hand, images largely can be removed by software in the Fourier case, whereas, for the pulse pair, this is impossible.
It is apparent that, since the only contributions we really are interested in are Items_F) and (3) (air motions, i.e., numbers typically of the order of a few m2 S ), every comparable or larger b.roadening cause must be eliminated. This is the case in particular of receiver noise, folding effects, images and window broadening. Other causes may lead to large errors but their frequency of occurrence shou).d be small.
4. DOPPLER SPECTRUM VARIANCE, SHEAR AND TURBULENCE
4.1 Space velocity spectra and pulse filtering
What follows is a rather sketchy summary; for proofs and fu.rther information,one should refer to Atlas and Srivastava (1972), Sychra (1972), Fri·schand Clifford (1974) , and their references.
Assume the air velocity isa random homogeneous vector field, with zero average, defined by its space correlation function components:
where land jl are rectangular coordinates, < > denotes ensemble average. Becaus~eQf homogeneity:
-+ = B •• (r) l.J
,By definition, the velocity spectral density tensor has for elements the space Fourier transforms of the Bij
10
(10)
(11)

I-' I-'
N 2
1
2
3
4
5
6
7
8
9
10
11
~ " ' _· " ·'. w .•. ~ . __ .• •• _--"·",."",, .. •.. ·. __ " $.~~ •... :::>--. ,£C. I
EFFECT
Dropsize distribution
Small scale motions
Shear of radial velocity
Beam broadening
Antenna rotation
Receiver noise
Statistical errors
Ground clutter
TABLE 2. Factors affecting variance of weather Doppl.~r spectra
(Variance Units are m2 s -2)
PULSE PAIR METHOD
Max effect Typical Other effects Comments Max effect
few units 1 - Negligible at low elevation angles
20 2 - May be affected by reflectivity grad-ients
45 2 -0.05 Negligible -
3 x 10-7 Negligible -237** bias V
s and P
s Mus t be removed ! 391
± 7 ± 1.2
237 Negligible bias V and P Should be detected 293 • • Non-weather targets aloft, alien transmitter: occurrence frequency very small -
S1.de'obe return S 237 Little bias V and P Risk should be de- 1172 s s tee ted (see Annex
C) Ambiguous range re turn S 237 Little bias V and P Risk should be de- 1172
s s tected
DC voltage same as 8 - Should be negligible
60 Hz leakage negligible -Images 237 2.2 bias Vs Should be negligible 1172
Clipping several tens negligible bias V and P Should not happen several s s tens
Other (i.e . digital Can be largel negligible Should be negligible quantization)
Aliasing estimator immune 1172
Window Broadening eBt1~tor immune 10.3
Estimating Technique underestimates large variances -6
FOURIER METHOD *
Typical Other effects Comments
same 'as for pulse pair
same as for pulse pair
same as for pulse pair
same as for pulse pair
s~me as for pulse pair
same as for pulse pair
. same as for pulse pair
----------------------------same as for pulse pair
I
Negligible
same as for pulse pair
same as for pulse pair
same as for pulse pair
2.2 bias Vs Should be diminished but can be removed py software.
negligible bias Vs Should be diminished by softwa~e.
small bias Vs Can be re-moved by soft-ware .
5. 1 . 'See ~nex B
Negligible Can be a1-~~~ re~ov~d by softwa~e.
NOTE: '*The "Pourier" method, as c,ons14ered here, is a 8tra~ght moment computation, unl1k~ the NSSL 1mplementat~on_ l!'he~e t~r~shpldi"p'g ~s ~s~~!
**Item 6 for puls.e pair concerns caSe Where r<lceiver noise i~ not accounted for in the pulse pair algorithm.

+ (1) P + + + +3 <1> •• (k) = -2 B .. (r) exp (-j k·r) dr 1.J 7T 1.J (12)
In a radar measurement, assuming, uniform reflectivity and negligible range effects, the result is a pulse volume average U on the radial velocity U:
a
(+r) f + + + +3 Ua = U (R) 12 (r, R) d~ (13)
+ where r is a central point on the beam axis, R is the radar range and 12 is the two-way antenna radiation pattern centered at t. If this pattern is s~etric and under some approximations, I can be said to depend only on 't-R. Then Ua (r) is a convolution product, and Eq. (13) can be rewritten after Fourier transforming and forming the power spectrum:
(14)
Since the beam is narrow and all radial velocities are nearly parallel:
(15)
I
Equation (14) expresses the fact that the spatial velocity spectrum, when measured with a radar, is filtered due to .finite sample volume size. Letus write the total radial variance 0T2 as the sum of the variance Of2 around U within the sample volume . plus the variance 0 2 of U : a
~ a a
(16)
then, computing ,these variances by integration of power spectra:
f 6 2 + +3 0/ = . [1 - (:L7T) IF2 (k) I ] <1>11 (k) dk (17)
By definition,O 2is the variance of the Doppler spectrum. If some expression is found to rela~e <P11 (it) to physical characteristi. cs of the mediU. m, Eq. (17) can be inverted in pr~ncipal to estimate this quantity. This implies the
12
i
I
j J

.' i
\----------~----~------- --------------------------------~--------~------------------
-+ knowledge of I (R). There is no fundamental difficulty here but the desire to ke~p control of the algebra. Clifford and Frisch (1974) assUmed :that I (t-R) is a three-dimensional Gaussian distribution, with one width parameter transverse to and the other along the beam. This gives an analytical (Gaussian) function for the filtering function:
(18)
4.2 Isotropic turbulence hypothesis
Thus far, we .have not spoken of turbulence; the only effect of pulse filtering is to separate in some way motions on small scales from motions on · larger scales. In order to process Eq. (17) further, one has to make the isotropic turbulence hypothesis: physically, this implies that kinetic energy is provided to the medium in space Fourier components corresponding to large scales and is dissipated by viscosity at very small scales (of the order of centimeters). Between these ranges, exists. an "inertial" subrange where no energy input occurs, but simply cascades from the small k values to the largest and towards uitimatedissipation. In these conditions, it has been shown, by integrating Eq. (12), that:
(19)
where the energy spectrum functiQn E(k) is:
. E · (k) = A £2/3 k -5/3 (20)
A is a universal constant near 0.47 and E is the turbulent energy dissipation rate, normalized to unit mass and expressed commonly in cm2 s-3, or ~2 s-3.
To make use of this hypothesis on the radar Doppler spectrum variances, it must be assumed that all the K values integrated in this variance belong to the inertial subrange. This is approximately true provided contributions from the largest scales are removed. Such contributions indeed are lumped together in a shear term, corresponding to the low k values in Eq. (19), computed simply by assuming a linear U variation throughout the sample a volume.
After the shear variance is subtracted from crf2 to obtain the variance
for inertial subrange motions cr. 2, Eq. (19) and Eq. (20) may be substituted
in Eq. (17); the integration is 1 performed, and an-+expression giving £ as a function of cr. and the parameters describing F(!-R) eventually is obtained.
1
13

Because of the 2/3 exponent in Eq. (20), £ is found proportional to 0.3
,
with a multiplying factor depending on sample volume characteristics. 1
Clifford and Frisch (1974) obtain:
(21)
where R is the range, 8 is a parameter inversely proportional to the antenna beamwidth and it has been assumed that transverse extent of this volume is larger than its radial depth.
5. MAXIMUM LIKELIHOOD PARAMETER ESTIMATOR
5.1 Rationale for implementation
A preliminary, morphological study of NSSL 1974 Doppler spectra helped clarify reasons why estimated variances are high. There are three possibilities in this connection:
(1) Spectra are indeed very broad, although well behaved;
(2) Spectra are made of several (most of the time two) distinct modes; each mode being narrow, the resulting variance is, nevertheless, large;
(3) An anomalously high uniform or near uniform noise-like spectral power density is superimposed .oD.: a moderately broad spectral mode. This third factor, most of the time, is compounded with either preceeding one.
Surely, it is necessary to distinguish between the three factors and ascerta,in their respective influence; thJ.ls one should conceivably limit ones~lf to subjective processing of spectra based upon identifi~tion , of variollB. geometrical features. Indeed, we will make use of this possibility. However, we felt it was worthwhile carrying the sophistication further and implementing a maximum likelihood estimator for spectral parameters. Main reasonS! for this choice are: 1,) it allows extremely well to specify underlinitis. assumptions; 2) it provides an objective way to remove uniform noise contt;:i;butions; and 3) it ought to, in principle, reduce statistical errors. Finally, this method ab~o proved a convelJ.::!l(mt frame to introduce the window broad~l},ing and account for it.
5.2 Gener~l description, and assumptions
The principle for the method is as follows: having a set of data, and knowiitlgthe statistics of these data as function of their expected. value, we dete~nea set of expected values so as to bring their joint probahility to ama~imum. . In general, expected values:, supposedly, are related by constra~'p:~S or expressed in terms of unknown parameters. The maxim~ likelihood
14

· .I ---:--~~~~--~--'-------
s , i
estimation, then, consists of ~inding the parameters' values whi6h ma~imize the joint probability of data expected values. - Detailed accounts of the method, its implementation and results are given in Annex A.
Here .are the basic assumptions made in the estimation:
(1) Data (that is, the spectral density values for each spectral line) are exponentially distributed and statistically independent;
(2) There are, at most, two distinct modes in the spectrum;
(3) Each mode has a Gaussian shape as a function of frequency, superimposed on white noise.
Each statement is open to criticism. For example, data are not statistically independent, as . commented upon in Annex A. This is not thought. a serious drawback in practice. Next, morphologic studies suggest there may be, at times, more than two modes. Yet, at most two modes are found usually ' to emerge distinctly from the background; moreover, it is doubtful, practically, whether one would be able to fit more than two independent Gaussian curves on a total of 64 data points. Finally, choosing a Gaussian curve is . somewhat arbitrary, but probably the best possible choice since many broadening factors actually represent a mapping in the frequency domain of tHe antenna pattern main beam which can be well approximated by a Gaussian.* Also, there is an inconsistency in the sense that the adjustment process is independently conducted for each mode and thus, yields two different values for the background noise level. This was do~e partly to simplify and .shorten the computing process, and partly to provide a consistency check by comparing both noise level values.
The M.L. estimator is implemented by means of a computer iterative algorithm; rough parameter estimates are needed to initiate the process. Basically, it is a simple moment computation similar to the Fourier algorithm in use at NSSL. However, since we are looking for several modes, it is necessary to determine whether there are one or two, and this is done on the basis of a minimum separation be~ween modes and a minimum spectral density signal-to-noise ratio. Then, the frequency range, over which the estimator will be applied, is restricted according to the mode locations; and finally the moments are computed on these ranges to yield initial parameter values. Also, provisions are made for folding and for separation from a possible image.
First results of this procedure were encouraging in the sense that a large fraction of the spectra gave rapid convergence, but pointed to the necessity of accounting for the window effect. Because of the data sample finite length (time window), the observed spectrum is the convolution product of the real spectrum and a sharply peaked but slowly decreasing function, so
; *There is, nevertheless, a major deficiency here in the sense that window .~ broadening is ignored. This effect is discussed and account ed for next.
15

that the spectrum edges are smeared and some of the signal power spread over the whole spectral range with mild frequency dependence. It was found possible to remove completely this effect by assuming for the spectrum a convoluted Gaussian shape, rather than a true Gaussian. The window effect is described in full detail in Annex B and details about the convoluted function used in the M.L. process are given in Annex A.
6. FIRST RESULTS AND TECHNICAL IMPLICATIONS
6.1 Data anomalies
A full scale maximum likelihood (M.L.) estimator operated on dualDopplertornadic storm observations gathered during NSSL 1974 Spring Program. Results indicate that:
(1) The noise spectral density consistency is much higher (by 10 to 25 dB) than would be predicted on the basis of signal-to-noise ratios p derived from incoherent receiver measurements (e.g., . digital ~ntegrator - D.I. - numbers). However, analog to digital converter (ADC) quantization noise can mask receiver noise because the automatic gain control (AGC) circuit reduces noise relative to lJuant:ization intervals. More omninous was the lack of correlation between Q and the ratio 0 of estimated signal and noise spectral powers. However AGC did n~t have a monotonic response (NRO) as a function of input level, which explains partly the poor correlation.
(2) A majority of spectra present a bimodal structure; most of . them correspond to low p values, although signal-to-noise ratios up to 35-40 dB still yie18 some bimodal spectra. In many cases, both modes have a comparable (within a few dB) integrated spectral power.
Scanning through the various identified broadening factors (Sections .l through 4), we were unable to provide a satisfactory explanation for these spectral features • . The most promising factor, i.e., possib~y interference through sidelobes, was investigated in detail, and had to be eliminated since it was impossible to reconcile velocities observed in bimodal spectra with neighboring values of radial velocities.
A clue to a possible explanation of data anomalies was found when realizing that P s' although not correlated with p 6' is correlated with ~raw time series numbers, characterized by root mean square values « and l'Q- for inphase and quadrature components I(t) and Q(t). This suggests that spectrum . noise present is reiated to the quantization ,process, and thus examination of time ·series data themselves proved necessary. Indeed, it was found that con-
. verted digital times series values exhibit a highly an.omalous behavior. In . the Norman radar 011 20 April 1974, approximately one level out of 32 (recall these are 9 bit + sign converters, with output levels ranging from -512 to +511) is present, although these preferred levels are not always equispaced. In the . Cimarron radar case, every level is present, but anomalously large proportions of recorded values are clustered on a small number of preferred values which are multiples of + 128 or adjacent levels. Although in some respect similar, <:his appeared-not as a pure coarse quantization effect.
16

t I
I I i I
While other, less significant, anomalies were hoted also, these caused by Doppler channel digital conversion process are quite likely to account, at least qualitatively, for observed spectral features (e.g., high, near-uniform noise and appearance of spurious spectral modes).
Computer programs built to ascertain the quality of' data were used next to probe some Spring 1974 observation days. It was found that a ,change in .' the ADC at Nnnnan (implemented in late May) vastly improved ,the data quality; the quantization limitation is still there, but amplitudes are quantized 1:>Y steps of 8 rather than , 32 levels. As ' for Cimarron, clustering of time series around preferred levels continued for the whole spring program, with consequences depending on AGC settings. On the whole, data that appeared to have best quality (NRO data) correspond to the last (also one of the most interesting - June 8) case of tornadic storms observed by NSSL in 1974. This dataset was selected for variance analysis; also it was used t .O test technical aspects of the M.L. estimating technique (see Annex A).
6.2 Quality of June 8 data
The performance of NRO's ADC converter on June 8 is such that most of the noise appeared to originate in the conversion process. Another significant . problem is the occurrence of abnormally high image modes: while in most cases images are 15-25 dB below the weather true mode, in some cases image rejection drops practica~ly to zero. Spuriously high image power also have been a problem in previous years and corresponding time series has I and Q components essentially in phase rather than in quadrature. This is clearly an indepen-: dent equipment problem; its consequences are altogether moderate, because s.uch high images are a consistent feature for a given radar range (e.g., Doppler gate and step numbers) and thus, can be identified easily and removed.
For CMF data an attempt was made to eliminate errors in AID conversion by assuming that every clustering value (there are 16 of them) is wrong and every other value is correct. Then, it becomes possible to apply regular Fourier or pulse pair algorithms to the remaining data sample. In the Fourier case, this amounts to using a very irregular time window (jumping back and forth between o and 1 throughout the sample duration); such a window will have very high sidelobes, which can be removed at the expense of severe thresholding (see Annex B). Fairly often, one signal component is practically constant throughout the whole sampling period; one still can perform a Fourier transform, but the spectrum will be symmetric and the velocity sign will have to be determined by some other method (e.g., field continuity).
Similarly, the pulse pair algorithm can be applied by keeping only these complex data pairs considered correct. This is not possible however, when one component is practically destroyed (e.g., if less than 10 pairs are available). We estimated variances using both the Fourier. (lor 2 sides) and, the pulse pair (when possible) corrected algorithms and selected eventually the minimum resulting value, together with corresponding velocity. It is found that, although variances are reduced by a factor 4 to 10 as a rule with respect to uncorrected algorithms, velocitllchangesare much less dramatic and, with few exceptions, stay within + 2 m s • This, probably, gives an idea of mean ' velocity inaccuracies due to anomalies in digital recording process encountered in these data.
17

7. NON-TECHNICAL BROADENING FACTORS
7.1 Bimodal spectra: sidelobe relationship
Since CMF spectra could hardly be simulated by Gaussian curves, fine spectral features were only examined in detail for NRO. While a fairly large proportion (about 30%) of spectra are still found bimodal, about 80% of these correspond to images; this is concluded when the difference between absolute mean velocities for each mode is smaller than the sum of corresponding estimate standard deviations. While some images were abnormally high, as reported above, no major problem was encountered in their identification.
Among the remaining bimodal spectra, most were obtained for low elevations and often in such regions (very steep reflectivity gradients) that sidelobe returns appeared as a possible cause. Based on an accurate pattern measurement for the Norman radar, (reported in Annex C), we rigorously attempted to identify this cause.
If f(6,¢) is the antenna radiation function for a direction 6,¢, away _from2the antenna axis, then the relevant factor entering the radar equation is f (6,¢) integrated over the solid angle where pattern contributions are not negligible.
Let us break this pattern into two parts, corresponding to main and sidelobes respectively, and consider the measured intensity field P <6 ,¢ ). An estimate PI of sidelobe contamination will be given by cross-cor~elgtigg the P field with the sidelobe pattern, that is: o
II P (~ 6) £2 (6 - 6 , ~ - ~ ) d6d¢ }} sidelobes 0 '1', 0 'I' '1'0
II mainlobes f2
Doing this, we initially assume that- P , in the right hand side is not contaminated by sidelobe returns. This doesOnot always hold, but certainly does for high P values, that is precisely those that interest us since they are responsiblg for sidelobe contamination.
It now becomes possible to identify regions where P -becomes comparable to Po and focus the att;ention on these regions to look f8r possible sidelobe generated spectral features. Typically, such regions correspond to the boundary of high reflectivity cores when steep reflectivity gradients are present.
As it happened. practically all the cases, where - PI/Po ratios pointed to possible · sidelobe effects, corresponded to OQelevation and comparatively small ranges (up to 40 km). This is unfortunate, first because ground proximity and possible resulting main beam distortions make any result somewhat questionable,
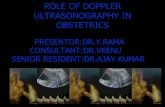
. but also, and mainly, because of range ambiguous interference possibility. This appears clearly on Fig. 1: all the high reflectivity areas seen by the low PRF (163 Hz) incoherent WSR-57 radar, beyond the Doppler radar range ambiguity limit (dashed line), will be folded back into the first 40 km.
18

~-.~.------- ------. ------~------------- --------------------
Fig. 1. Photography of the incoherent WSR-57 Norman radar display on June 8, 1974. Markers are 40 km apart. Also shown (dashed line) is the Norman Doppler radar unambiguous range limit.
Furthermore, when inspecting the range/ azimuth pattern (not shown here) of bi-
_ modal spectra occurrence for zero degree elevatio-n, one detects similarity with this range ambiguous echo pattern to the extent that a full scale study of these data would allow, quite possibly, to sort out various contributions and to extract both radi,il velocity fields. We did not go into this further, but clearly had to rule out these regions as far as identifying sidelobe echoes are concerned.
Finally, among the very few remaining situations, having further eliminated those where radial velocity gradients are small so that no sidelobe individual spectral signature could be resolved, we came across an example of what is believed to be sidelobe identification. Thi$ result is reported elsewhere (Waldteufel, 1975); sidelobes usually manifest their influence by building around the true spectral mode a nearly horizontal plateau which encompasses radial velocities present in the surrouuding high reflectivity regions. This does not affect the mean velocity at all, but does in
crease (by about a factor of two) the estimated variance. Without being able to bring indisputable proof, due to the particular data field structure, other evidence does suggest that in some cases sidelobe influence may be much more severe and even bias estimates of the mean velocity.
7.2 Other broad spectra
Leaving aside regions subject to sidelobe contamination, ambiguous range returns, images and near zero frequency (ground echoes) modes, there is still a small number of bimodal spectra. In most cases, these occur in a large reflectivity, fairly strong wind gradient environment. We are left with only two possibilities: this is either the result of a yet unexplained equtpment irregularity, or a real effect. Wb-tie the first eventlUality cannot be excluded, for all we know; some factors favor the second one. Unexplained bimod~l spectra are more often found in regions where variances of surrounding unimodal spectra ar~lquite large, and the two modes are separated generally by no more than 10 m s • Thus it is suggested that, due to the particular structure of reflectivity and radial wind fields, resulting Doppler spectra m~y have two distinct maxima. Recall that, on the scale of a few hundred meters, extremely strong wind gradients are possible. For example, Merrem an~lStrauch (1974) describe observations where the vertical wind changed by 6 m s over
-2 -1 about 80 ro, i.e., a shear of 7.5 10 s .
19

It is impossible, and besides of doubtful meaning, to associate such spectral modes to mean flow fine structure. Therefore, the only acceptable solution in such cases is to incorporate the two modes and to reconstruct velocity and variance for the whole spectrum.
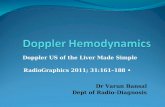
It has be~n stated that the maximum likelihood estimator does not succeed if the assumptions made at the beginning are not correct; we refer here specifi~ally to the Gaussian spectrum assumption and to the fact t~at, in actual. M.L. implementation, standard deviations are limited to 8 m s 1. Incase of very broad spectra, these are likely to fail. Thus, we compared variance estimates from 'pulse pair and M.L. algorithms for regions exhibiting large shear. In almost every case, unusually large values given by the former correspond either to high noise level or to the presence of a strong image. However, there are a few more complex cases; for the only one we have identified within a very active portion of the storm, Fig. 2, displays the corresponding spectrum as well as those for innnediate neighboring gates ih the same scan. This region has very large shears in every horizontal direction; in particular, if we are to believe mean velocities estimated from mainm~~e !requencies, one of these shears (between curves · c and e) is about 6 x 10 s 1 (velocity from spectrum e has to be unfolded from -32 to +36 m s-l).
AZC37.0+ =38D bed -RAD -390 e .
RANGE - .41.6141140.4 k m
34.2
NORMAN 8 .JUNE 1974 EL-2 DEG. 1600 CST
. VELOCITY
20
The spectrum (c) is very anomalous, with 3 modes and a very higll background noise spectral density. Unfortunately, it is difficult to conclude, because this is precisely one of the gates suffering very high image ratios due to apparent contamination between I and Q components. Thus, one of the symmetric peaks (+10 m s-l is spurious (probably the one for +10 m s-l; same remark for curve [a]). Still, there is a mode near the Nyquist frequency which cannot be ex~ plained. Also, the background noise level is much higher than computed 9
even allowing for severe quantizatiop effects. On the other hand, spectrum (c) seems to correspond to a "hole" in reflectivity, 13 to 20 dB lower than the environment. It might be suggested that the actual reflectivity dip is much larger (e.g., a small region practically free of echo) and that the
Fig. 2. Example of a very broad, multimodal spectrum recorded at NRO on June 8, 1974, and surrounding spectra. Also ·showu .are signal-t()noise ratios and mean velocities for each gate.

} l
l { ,
( I
~
I I i i
-1 '. . + 34 m s mode comes from the outskirts of the main lobe near gate (e). Indoubtedly, an interesting weather feature is present here, but the incorrect times series behavior forbids any firm conclusion. No definite continuity in altitude has been found for this weak echo feature.
8. ANALYSIS OF JUNE 8, 1974 NSSL DUAL-DOPPLER VARIANCE FIELDS
On June 8, 1974 a very severe storm was observed in central Oklahoma. A squall line, oriented SW-NE with cells travelling towards the NE, moved through the dual-Doppler area and various cells belonging to this system were sampled by.NSSL radars. The present study focused ov~robservations around 1600 CST. Reasons for this particular choice are intrinsic interest of the meteorological situation and convergence of other data analysis efforts within NSSL. Figure 1 shows the storm core as seen by the WSR-57 Norman radar at low elevation and Fig. 3 delineates the area where dual-Doppler processing was performed. The space resolution wa$ 1 degree in elevation and azimuth (although 2 elevations were missing for NRO) and 600 meters in range~ Total data taking period was about 5 minutes. .
8.1 Outline of analysis
After Doppler data have been processed and various broadening contributions removed, width values are available separately for each radar, in a "B" scan format, that is, sorted by surfaces corresponding to sectorial, constant elevation radar scans. These fields must be used, now, to construct other fields in such a way that comparisons and combinations between data
'. ' from both radars become poss1ble.
We used the analysis scheme built by Ray et al., (1975); thus the analysis is completed in two steps.
Coplane step: Each data field is interpolated into planes common to both radars. First, data are assigned to locations corresponding to a common time assuming uniform storm motion; this motion is estimated by tracking low elevation reflectivity patterns. Next, grid points in the "coplane" frame of reference are filled using a weighted influence function D.
D M= [ (_:_:_:...:c::-=-: ;-:...;;:.:"-=:-+---:-:-=:-; :-:-::=-)
where r is the distance between data point and grid point, d is an influence radius, subscripts hand z indicate horizontal and vertical directions. In the June 8 case, dh and d are both taken equal to 1.5 km. The grid step inzeach coplane was also 1.5 km in either direction; cop lanes were built for
21
(22)

angles above the horizontal ranging between 0 and 14 0 by 1 0 step.
Cartesian (XYZ) step: Cop lane data are interpolated into a tri-rectangular frame of reference. First of all, velocity data are used to derive a third velocity component normal to the coplane; this is done by integrating the continuity equation (assuming incompressibility). The interpolation process is as before, except the influence radius along the vertical was decreased to 1 km.
One feels that, . in analyzing Doppler data, account should be taken of measurement accuracy. Accuracy is estimated ' either theoretically for simple moment estimates (Berger and Groginsky, 1973) or numerically for M.L. estimates (see Annex A). It is not perfectly clear which weighting procedure should exactly be followed. Estimated parameter probability distribution cannot be very different from a Gaussian (or X squared) distribution, in which case a M.L. criterium favors weighting by s.n.-2 (see Annex A), where S.D. is the estimate standard deviation. However, since S.D. seems an increasing function of the estimated spectrum width 0, estimated widths would be biased consistently toward ~ow values. The compromise we have adopted here, without serious j~stification, is to use (S.D.)-l instead of (s.n.)-2. Practically, this is done by dividing the influen~e function coefficient D by S.D. when filling the coplane grid. Note that S.D. (6) is proportional to S.D. (v) so that the same weighting coefficients apply to velocity and standard deviation estimates.
22
Should we be concerned solely with scalar quantities such as variance, clearly a direct interpolation into the Cartesian frame is possible. Yet, be~ ~ide the fact this 2-step analysis scheme was readily available, a knowledge of the 3-dimensional velocity field is a major asset since dynamics are likely to be deeply associated with turbulence development; this advantage more than overcomes, to our eyes, the extra smoothing involved by a double interpolation procedure.
Figure- 3 gives the geometry of dual-Doppler configuration, the area scanned by both radars at 0 0 e,levation, and identifies the portion of the data which .has been processed. Alsoshown is the ground trace of coplane and
' C;irtesian analysis grids.
Fig. 3. Geometry of dual-Doppler network showing areas processed on June 8 and the coplarie and Cartesian grid ground traces.
":
'~
! I
)

'\
f
} ( l , )
\ r
We present, in what follows, results concerning spectral variances or widths. Other results of interest concerning reflectivities and vertical velocity ~omponents are reported in Annex D.
9. RESULTS IN A COPLANE FRAME
It was felt that although the cop1ane reference system is not convenient for physical studies, it should be us~d as much as possible when considering technical or close to technical aspects since it involves only one interpolation process. We are not going to give a morphological description of observations here; we simply shall compare various fields obtained with both radars and look for correlations when correlations are expected or relevant. The objective way to assess correlations is to compute the cross-correlation coefficient C: for two fields x and y, C is defined as:
1 I C x y
a a x y
where xl and yl are x and y minus their mean values, and overbar denotes ensemble average.
It must be recognized here that the work reported from now on was not conducted as extensively as would have been desirable, due to the need to assay rigorously all spectral broadening factors and to lack of time. This defect will -be felt even more strongly in the next section.
9.1 Spectrum standard deviation comparisons
A first step in analyzing spectral widths is to remove the shear contribution. This can be done simply in the coplane frame (actually it would have been still better to do it in the raw data "B scan" frame, and we would have done so but for lack of time). For each radar~ the radial shear and radial shear variance were computed, using formulae given in Section 3.
Figure 4 a and b shows, for a particular coplane, the variance field before and after removal of shear contribution. It is seen that no 1arg~ modification results from shear correction; in other words, in a tornadic storm, shear is not the main broadening factor--especia11y so in case of fairly broad spectra. We note with relief that never does · the variance after subtraction vanish (or become negative); the contrary would mean a disturbing lack of consistency in the data.
However, removing shear does not have a negligible influence as illustrated by the differences in contours of equal width. As for the f1eld absolute values, note that most obt~ined values are smaller than 3 m S-121 with large areas smaller than 2 m s 1 and a few cases smaller than 1 m s • Regions of larger (although meteorologically acceptable) widths are well defined and generally located in central portions of the storm system (see Fig. 1). Some large values (borders of Fig. 4), corresponding to the edge of the storm, are suspect due to possible broadening either by range ambiguous interference (see Fig. 1), or by sidelobe returns.
23

5km
RAW SPECTRAL 5°COPLANE
SPECTRAL WIDTH WITHOUT SHEAR
~L~~~~ o 5km .
Fig. 4 a and b. Maps of spectrum width contours (m s-l) for NRO at 5° . cop1ane before, (a) and after, (b), removal of shear contribution. Axes are parallel to the sides of the dashed square on Fig. 3; point 0 is, as in fig. 3, the center of this square. Code 0 are width 0 to 1 m s-l; Code 1 are width 1 to2 m s-l, etc.
24

Aga~n. it looks like the first two coplanes might be contaminated by ground returns or other errors and we shall discard them.
The remaining coplanes show a definite correlation between NRO and CMF, with C values of the order of 0.60. No consistent change in C results from removing the shear broadening or going from a to £.
Although a 0.60 correlation coefficient ·has a quite positive significance, it is much smaller than the 0.9 figures obtained typically for reflectivities (Annex D). Most of all, it is disturbing that all the transformations applied to raw widths (recall there is/ a range dependent factor in £) do not modify consistently this coefficient.
The question naturally arises whether there is a physical significance to . these correlations being moderately good, or whether poor data accuracy should be incriminating. . We try next to provide a partial answer to this question.
9.2 Radial shear versus spectrum width
A number of theoretical (Tel!nekes and Lumley, 1972) as well as experimental (Borresen, 1970) publications indicate that turbulence may be generated by shear of the mean flow velocity. Since in the coplane . frame we have the radial velocity, it seems appropriate to correlate quantities related to s.pectrum width with this shear, characterized as the modulus Dr of the radial velocity shear vector.
This comparison is illustrated by Fig. 6,for cor-relation between D and the spectrum width corrected from shear (no significant difference wouldrresult here from choosing another related quantity). Although not identical, results for both radars are similar; theC values are small for small coplane angles, and increase gradually to about 0.5, where they .stayfor the last few coplanes.
II: ~C( ;:)w
~.(/):r 0.6 *NORMAN-.cIMARRON u * CIMARRON ~~ • NORMAN (/)(3
~9 0.4
z~ 5!..1 0;2 !;is ..I .Q
·w :·C( :Q; II:
m'~ oC(
~F -0.2 OQ ~j
8 JUNE 1974·
a
c
-O.4o=----=2--4~-'6~-~8:--'--:170-'-'-~-...:...:'14· COPLANE :ANGLE,DEG.
'Fig. 6. Correlation coefficient between spe.ctrumwidth (corrected for shear) :andshear itself for NRO andCMF and 'NRO-CMF field, at each coplane angle •
.26

of strain tensors (se~ below); assuming a m1x1ng length model for the Reynold stresses, one expects the production to be a quadratic function of shear terms.
Detailed forms of the Tk and E correlation are shown on Fig. 7 and its captions. Leaving aside the first altitude (probably contaminated by various errors in both variances and velocities), we see that some degree of positive correlation is consistently present. Some expressions (those involving x and y derivatives, vorticity expressions), reach most of the time 0.5 or above.
0.7
0 .6
0.5
0 .4
0.3
(,) - 0.2 z 0
Ei 0.1 ..J 1&.1 a: a: 0 0 (,)
-0.1
-0.2
-0.3
-0.40 2 3 4 5 6 7 8
ALTITUDE kni
Fig. 7a. Correlation coefficientC, be-tween diss,ipation coefficient E for NRO and various .Elhear related quantities Tk :
Tl =L ~=1,3
. 5=1,3
2 D ..
1J
TS =" D' 2 L." i3 i=1,2
"'. 2 = L." D .. '. i=l; 3 1J
j=1,2 .
28
0.7
0.6
0 .5
0.4
0 .3 (,) -z 0.2 0
Ei 0.1 ..J 1&.1 a: a: 0 0 (,)
-0.1
-0.2
-0.3
-0.40 2 3 4 5 6 7 8
ALTITUDE km
Fig. 7b. Correlation coefficient C, between dissipation coefficient E for NRO and various shear related quantitiesTk :
=L . i,=1,2 5=1,2
2 D ••
1J
" . 2 LJ (D .. -D .. ) ij=12 1J J1
23 31
=L i=1,3 j=1;3 i=!j
T 9 =b
2 S ..
1J
:i=1,3 j=1,,3
2 S ..
1J
j , t
I

a)
IQ , II)
N
0.5
0.4
E 03 \II • ~
z o ~ 0.2 0: en en 00.1
8 JUNE 1974 NORMAN 1600 CST
°0~~~2~~~4~~~~~~~
ALTITUDE km
8
7
6
II:: ~ 4 ::r: t/)
z <I: 1£1 ~ 2
I:
T
O~i --~~~--=---~~~~--~--~ o 2 3 4 56 7 8 ALTITUDE. km
c)
8
7
I .. 6 ... 2 5
2
°O~~1.0-~2-----'&"3---4L-...~5~·--....L6-----:'-7---18
ALTITUDE km
Fig. 8~ a, b, and c. Altitude variation of: (a).£. mean value and standard devia,tion; (b) (Tk)1/2 mean values k = 1 to 5; and (c) (Tk)1/2, k = 6to 10.
30

r I f
1 !'
/; Q
)
a)
NORMAN DISSIPATION. ------r.;~~-_ 8 JUNE 1974 ' H= 5km
b)
NORMAN .. --g JUNE 1974
- H"5km
o Skill
Fig. 9 a and b. Maps in the horizontal H = 5 km plane of: a) £ for NRO; and b) (T )1/2 as defined in Fig. 7. expressed in 10-3 s-l units. k
31

-+ ae "-}- ~ -' - + V· grad e at = div [~+ 1 Q - 2v L] p 2
Where:
V is the mean flow velocity;
E is the mean flow kinetic energy
-+ u is the turbulent velocity;
P and p are pressure and density;
v is the kinematic viscosity;
<f+-S is the mean strain rat~ tensor:
# R is the Reynolds stress tensor:
ensemble average;
+-+ +-+ +-+ +-+ - "R:S - 2 s:s
1/2 :E v. 2 per mass unit; 1.
OV. Sij=1/2[OV./Ox.+ ~ ];
1. J xi
R .. =u.uj where overhead bar 1.J 1.
e is the turbulent kinetic energy 1/2 :E u . 2 per mass unit; 1. ._
-+ -+ -+ -+ T is equal to p u where p is pressure fluctuation; Q = eu;
-+ -+ -+- -
(25)
denotes
R = pv, L = u's, where s is - the fluctuating strain rate tensor:
s .. = 1/2 1.J
Cu. 1.
[ 0-"'j
Symbols (.) and (:) stand for single and double coritraction.
Of the five terms in the right hand side ofEq. (24), the first (pressure work) is zero because of assumed incompressibility, the second is generally negligible, the third corresponds to mean flow energy transport by Reynold stresses. The fourth is ' negligible, same as the second one because viscosity does not act on the. mean flow; the fifth corresponds to losses through turbulent ' energy production. We find it again as a production term in the right hand side of Eq. (25). The other terms here are energy transport terms (the first th:ree) and f~nally . viscous dissipation, which for turbulent lllotions cannot beneglec ted. . Ac tualiy, in the isotropic turbulenc;e case, this last term is identical to £ determined from Doppler spectral width estimation.
There is not much we can do about the energy transport terms; however these simply serve to redistribute, respectively, mean flow and turbulent
32

I ( I
energy throughout the volume. If we neglect them and assume further turbulence is stationary, we get:
dE + ~ +-++-+ at + V-grad E = R:S (26)
+-+ +-+ R : S = E
(27)
It seems therefore, even without assessing the validity of previous hypothesis, a pertinent idea to compare E to mean flow advection, which we are able to compute. When comparing these quantitie~, it tu1ns out that practically no correlation exists between them. Also, V· grad E is of the order of a few m2 s-3, that is one order of magnitude above typical E values.
Thus; a first conclusion is that some other term must balance locally energy advection in the main flow equation. A likely candidate for this is the Eulerian derivative. We do not know, unfortunately, this quantity but tentatively may use the storm mean motion estimated by tracking reflectivity patterns, and compute an energy advection in this .new frame of reference moving approximately with the storm.
OE · . + + It is found that ot does have the same order of magnitude as V· ,grad E.
. Nonetheless, this is far from resulting in even an approximate cancellation; correlation between resulting values and E still gives poor results. On the one hand, this might be due to other terms in the mean flow energy exchanges [not represented in Eq. (25)]. On the other hand, most likely we have an extremely poor estimate of the Eulerian derivative and the comparison we wisqed to carry out will be possible only when time variations of radar observed quantities become known with acceptable accuracy.
Therefore, we are not able, really, to draw any conclusion concerning the role of turbulent dissipation. Some indication of it being correlated with the mean flow energy is evid~nced by+Fig. l.D where ¥e have plotted the horizonta1+averages A and ~ of V· grad E and V • grad E as a function of altitude, where VH is the horizon~a1 mean flow ve10ci~y._ It is seen that large values of opposite signs largely cancel so that mean A and ~. values are of the order of mean E. Also, when the storm is considered as a ~ole, it seems to radiate energy away at every level, at a sensibly constant rate. On the contrary, there exists within the storm, a global advection of kinetic energy from low to high altitudes and this .can be associated to higher turbulent energy loss when the altitude increases (see Fig. 8a); actually the upward mean energy flux A - ~ is only about twice the mean E value. .
This concludes our analysis of June 8, 1974 NSSL radar data. Surely, this investigation might and should continue, with a detailed examination of the variance fields themselves, which. we hardly inspected in detail; also, possible additional hypotheses might be employed to estimate other terms in
33

0.5
II) 0.4 I fI)
0.3 '" " .;
E I ' ....... .; 0.2 I
z I 0 0.1 I
~ A / L&J 0 -- --.,-- -- -- -_. f;
-0.1 I « ,
~ -0.2 ,
(!) " a::: " I,LI -0.3 " z L&J
-0.4
-0.50 3 4 5 6 7 8
ALTITUDE km
Fig. 10: Altitude va~iation of A and ~, total and horizontal mean flow k~netic energy advections.
the energy equation, and perhaps to investigate vorticity dynamics. Assimilating, as we did, turbulence to scales smaller than the pulse volume and mean flow motions to scales larger is undoubtedly a very crude approximation, which is not likely to hold over the whole analyzed volume and should be tested, with respect to the kinetic energy spectrum. On the other hand, even though the actual end of this study is brought about by lack of time, it is already clear that shortcomings in the data themselves or lack of .additional data would ultimately limit the extent of analysis.
11. CONCLUSIONS
Dual-Doppler radar data have been used to analyze Doppler spectra width and relate it to turbulence intensity. It is found that, subject to a careful data processing, variance fields may be obtained, corr.ected for the contribution of radial shear, and used to compute a turbulent dissipation E field.
The E fields from both radars are interpolated first in successive coplanes. In this frame, they have a correlation coefficient about 0.60, and each has a significant correlation with the corresponding field DR of radial velocity shear. However, the difference fields E MF - E 0 and DCMF - DNRO are not correlated, and tentatively we conclude t~a~ tur~lence is ~sotrop~c on the considered scales (i.e., smaller than 1 km). The difference in E
fields between both radars is attributed to poor variance estimates thereafter associated with CMF data • .
E values from NRO data are interpolated into a Cartesian frame. Available altitudes extend from 1 to ~~. Average E values increase continuously with altitude from 0.11 to 0.3 m s 3. (The maximum locally E value found is 1.1 m2 s -3.)
A correlation is attempted between E and various expressions rel~ted to the shear tensor. Little correlation is found with vertical derivatives, but better one~ with those quantities involving horizontal derivatives. When taking into account the altitude variations, the highest resulting correlation coefficient is about 0.6 and occurs with horizontal derivatives of the total velocity vector.
34
.,
1

i ~ Detailed inspection shows actual correlation is better in a portion of l the data limited to strong dynamic features. Regions of large turbulence tappear elsewhere which do not seem related to any known characteristic of the
velocity field.
A poor correlation is found between £ fields and the advection of mean flow kinetic energy. This term is one order of magnitude higher and, probably to a large extent, balanced by temporal variations. When the energy advection fie~ds are averaged, the net energy inflow mean value is nevertheless of the order of £ and follows a similar altitude variation.
/ In conclusion, turbulence characteristics in a t;:ornadic storm using Doppler radar data have been examined. Turbulent energy dissipation is shown to be a mechanism of significance, and its intensity 'to be in certain cases definitely related to mesoscale dynamic features. In order for similar, future investigations to yield a full return, potential radar capabilities regarding space coverage, data accuracy, and time resolution should be utilized fully and supplemented, whenever possible, with other observations. Necessary developments seem within the state of the art and the prospect of implementing them to the National Severe Storms Laboratory facility is extremely promising.
12. ACKNOWLEDGMENTS
This work was carried out while the author was a visiting scientist at the National Severe Storms Laboratory, on a six month mission from Centre National de la Recherche Scie~tifique, Paris 75007, France.
I first wish to thank warmly NSSL Director, Dr. E. Kessler, for his most kind invitation, and NSSL staff for their friendly welcome and help in every circumstance, in particulCir Administrative Officer, Jack T. Andrews. lam grateful to Dr. J." T. Schaefer for fruitful discussions; to all of the Computing and Data Processing Division, and particularly, Messrs, W. C. Bumgarner and M. L. Weible, who provided me with constant and valuable help throughout computational problems encountered in this work. It is a pleasure to acknowledge the frequent stimulating and enjoyable discussions I had with members of the Advanced Techniques group and particularly, Dr. R. J. Doviak, for whom I worked, Drs, P. S. Ray, G. B. Walker, and D. Zrnic, Messrs. D. Sirmans and J. Carter. I am especially indebted to Dr. Ray who provided me wholeheartedly with the objective analysis implemented by him, without which most of the final results presented above would not have been obtained, and to Dr. Doviak for reviewing and editing this work.
Finally, I am grateful to NSSL secretaries, in particular Ms. Debbie Killian and Joy Walton, for the fine typing job they did for me and to Ms. Jennifer Farris and Mr. Charles Clark for their skilled graphic work.
35

13. REFERENCES
Berger, T. and H. L. Groginsky, 1973: "Estimation of the spectral moments of pulse trains", International Conf. on Information Theory, Tel Aviv, Israel.
Blackman, R. B. and J. W. Tukey, 1959: The Measurement of Power Spectra. Dover Publications, Inc., New York.
B6rresen, J. A., 1970: "Use of Doppler V.A.D. pattern to detect shear zones and turbulence in a snow storm", Preprints of the 14th Radar Meteorology Conf., Tucson, Arizona, Amer.Meteor. Soc., p. 187-190.
Frisch, A. S. and S. F. Clifford, 1974: · "A Study of convection capped by a stab1e ·layer using Doppler radar and acoustic echo sounder", J. Atmos. Sci., 31, p. 1622-1628.
Frisch, A. S., L. J. Miller and R. G. Strauch, .1974: "Three dimensional air motion measured in snow", Geophysical Research Letters, 1/2, pp. 86-89.
Gold, B. and C. M. Rader, 1969: Digital Processing of Signals. McGraw Hill, New York.
Merrem, F. M. and R. G. Strauch, 1974: - uObservations of a hailstorm with two Doppler radars", Preprint, AMS Conf. on Cloud Physics, Tucson, Arizona, pp. 287-291.
Petit, M., 1962: "Deponi1lement de resu1tats entaches d I erreurs ale'atoires. dans Ie cas ob Ie signal lui-meme est ale'atoire", Ann. Telecom (Paris), 17, N. 11, November, p. 316.
Rummler, · W. D., 1968: "Two pulses spectrCllmeas,urements", Tech. Memo, MM~68-4727-15, Bell T~lephone Laboratories, Whippany, New Jersey.
Ray, P. S., R. J. Doviak, G. B. Walker, D. Sirmans, J. Carter, and W. C • . Bumgarner, 1975: "Dual Doppler observations of a tornadic storm", Preprints of 16th Weather Radar Canf., Houston, Texas, Amer. Meteor. Soc., p. 115-120.
Schwarz, M., 1970: Information, Transmission, Modulation and Noise. McGraw Hill, Inc., New York.
Sirmans, D . . andR. J. Doviak, 1973:. "Meteorological radar signal intensity estimation", NOAA Tech. Memo, ERLNSSL-64, September.
Sirmans, D. and W. C. Bumgarner, .1975: "Estimation of spectral density mean and variance by covariance argument techniques", Preprints, 16th Radar Meteorology Conf., Houston, Texas, Amer. Meteor. Soc., p. 6-13.
Srivastava, R. C. and D. Atlas, 1972: "The effect of a finite radar pulse volume on turbulence measurements", 15th Radar Meteorology Conf., Urbana, Amer. Meteor. Soc., p. 297.
36

Sychra, J., 1972: "Inverse problem in the theory of turbulence filtering by the radar pulse volume", Preprints, 15th Radar Meteorology Conf., Urbana, .Amer. Meteor. So~., p. 286.
Wa1dteufe1, P.,1975: "Antenna side10be effects on Weather Doppler radar data", Preprints, 16th Radar Meteorology Conf.,Houston, Texas, Amer. Meteor. Soc., p. 178-180.
Tennekes, M. and J. J. Lumley, 1972: A First Course in Turbulence. M.I.T. Press, Cambridge, Mass.
37

ANNEX A
MAXIMUM LIKELIHOOD PARAMETER ESTIMATION FROM NOISE DATA APPLICATION TO GAUSSIAN STATISTICS AND TO WEATHER RADAR
DOPPLER SPECTRA
A.I General Description: Case of Gaussian statistics
A.I.I Principal
A.I.I.I Problem statement
Let us consider an experiment yields N measured values, wi' corresponding to N values of a variable Yi' For example, in the case of a calibration test, Yi would be the calibrated input power level and wi would be the measured output.
The data wi are noisy, either because noise is superimposed to the useful signal, or because the signal itself is random, or both. Assume we know the parent statistical distribution of wi:
where ~ is the expected value of~. Assume, further, that the data are statistically independent.
(AI)
Instead of the measured values wi, one would like to know the expected values~. This is, of course, impossible; but it is possible to find a set of values ZJ., such that, given the data field, the probability of zi = Wi be maximum. In other words, we set out to build a maximum likelihood estimator .
. ~f no a priori information on ~ is available, the undertaking is generally hopeless. On the other hand, "let us consider the case, extremely frequent in practice, where we know or assume the functional dependence of Z
on y, but this law includes a number of parameters not known in which we are interested. For example, it may happen that z(y) is known or believed to be a Gaussian, but the three parameters of the Gaussian curve (mean value, variance,- total area) are the actual unknowns of the problem. The following describesJ10w a maximum likelihood estimator of the parameters can be built and implemented.
A.I.I.2 Bayes' Rule
The problem can be formulated using Bayes' rule for conditional probabilities:
p(iJJ/W) p (00) p (00/00) - -'------'---foo p (00100) p (00) dW '
-00
" 38
( A2)

In this formula, p(w/w) is the [known] probability distribution for W; pew) is an a priori probability for W; p(w/w) is the conditional probability that the expected value be w if w is observed. The distribution ofa priori probab:i,lities is not always known. In the absence of other information (i.e., the general case), it is sensible to. assume that pew) is uniform, therefore:
p (w/w ) p(w/w) =
A.l.l.3 Maximum Likelihood (M.L.) equations
Since the w. are assumed statistically independent, their joint probability can ~e written as a product and we get from (~3):
p = p ( ••• , w·. , .. .• / •• , w. , ••• ) ~ ~
(A3)
(A4)
We want now to max~m~ze P. Actually, it is more convenient to maximize Q = log P since this is a sum rather than a product and thus easier to handle. Then introduce the a priori knowledge (or assumption) of the functional dependence on w on y :
w = z (y, ... , x.,···) fA <;: ) J ~
where the Xj are J unknown parameters we want to determine. We write that Q has an extremum with respect to the x.:
J
dZ.
= L;qi dX~ = 0
defining
1
p(w./z.) 1 . 1
where zi is now substituted for wi.
J .
dZ. 1
(A6)
The system (A7) has J equations and J unknowns; solving it will yield M.L. estimates for the x ..
J
39

A.l.l.4 Gaussian statistics case
Assume that the distribution of w. is Gaussian: 1.
p(w.lZ.) 1. 1.
we maximize Q = log P [see (A4»):
1 exp -
(Wi/ Zi)2
2a2.
2 1 "" (w.-z.)
Q=--L..J 1.21. +C=Q1+ C 2 . ai
(AS)
where C does not depend on the wi. Equation (A9) shows that, in the Gaussian case, there is one to one correspondence between a maximum likelihood technique and estimation using the least squares criterium.
The system (A6) becomes:
w.-z. dZ.
L: 1. l. 1. 0 H. = --= J ai 2 dX.
i ' :J
(AlO)
In what follows, the Gaussian case is considered in detail because of its simplicity and practical importance.
A.l.Z Implementation .
A.l.Z.l The iterative linearization algorithm
We are left with the problem of maximizing a scalar function Q', or, equivalently, solving the non-linear system (A€?). This has been the subject of many studies and suggestions. Here we present an algorithm which is very efficient and successful on many occasions; another algorithm is described later. In every case, a fundamental restriction is that in the considered volume of the x. space, Q' must have a single maximum, if one hopes for a U:n~que solution~
. . .. Assume that we have a set x. 0
values) which are thought to be In ·z . 0 be the corresponding z. values 1. . . 1.
H. = H. + oR. J J J
of values for the parameters Xj (initial the vicinity of the correct values. Let and expandH. to the first order:
J
40

?
j = 1, J (All)
We get H. = 0 and get: J
++ -+ -+ R • Ox = HO
where
L [CQ1 dZ. dZ. ) d2Z. )0] = -1 ~. 0 + (g,. 1 r
jk . dZ. dX. ~ . ..;1, dX. d~ i 1 J J
(Al2)
is the element .of the square matrix R.
We now solve the system (Al2):
and thus obtain a set of increments 0 Xj for the x'. The incremented values usually do not represent the exact M.L. solution ~ecause the linearization was not completely correct. In general, they do represent an improvement over the Xjo and then can be used as initial values for a next step. The procedure is carried on until the increments become very small and satisfy a convenient convergence criterium; indeed such a criterium can be defined objectively, as is seen next.
A.l.2.2 Variance of the estimates
Consider the solutionxjand let us determine the errors 0 Xj resulting from errors OWi in the data. To do this, differentiate the equation Hj = 0 with respect to both the Xj and wi. We use the fact that this differentiation already has been performed for the Xj [see CAll) and CAl2)] and obtain: .
dqi dZ i ow. = 0 -- -- 1 dW. dX.
1 J
This system is similar to the M.L. linearized system (Al2); the solution is:
=L: j
L i
41
dq. dZ. ·1 1
dW. dX. 1 J
ow. l.

(AIS)
with
(AI6)
We use the fact that the data are statistically independent and conclude that, provided the linearization is valid, the variance of ~ is expressed as a function of the data variance:
(AI 7)
Note, however, we have used a linearization scheme and therefore, are limited to-small error values. In other words, whenever this formulation yields large standard deviations, they are unreliable, and likely to be still larger. This estimate of the variances provides a convenient criterium for terminating the iterative algorithm; every increment QXk should be smaller than a small frac~ tion (say 0.1) of the corresponding estimated standard deviation aXk.
A.l.2.3 Case of Gaussian statistics
We start out with the system (All) fqr Hj and obtain for elements of the matrix:
r jk $ L 1 0:' [c:; ::~)o + (OO1-z • i)(a:::~)o] (A18)
We assume further that the second term in the right hand side of (A18) can be neglected. Assessing the assumption validity is not easy; clearly Wi-zio must be !')mall in some sense,i.e., both the statistics of the data should not be too scattered, and the trial values for Xj should not be too far away. In practice, the assumption turns out to give good results even when these conditions are pqorly satisfied.*
* Whereas the linearization algorithm applies to any extremum determination problem, this assumption is rather specific of the maximum likelihood estimator, wher~ in general the probability densities p are sharply peaked functions and thus C1qi!C1zi [see Eq. (A12)] may reach high values SO that one often is juS!tified in neglecting the other term. On the other hand, let us consider t4~ minimization of an integral with respect to. the Xj;
K = f G (y) z (y, .•• , Xj , ••• ) dy
where G(y) is a weighting function, and other notations are identical to the text • . Aftei discretization, this becomes:
G. zi 1.
42
minimum, hence

We then get (dropping the ' O superscript for simplicity);
r' k = L' --L J l. a 2 i
(lz. l.
dX. J
(A19)
Similarly, the variance of the estimate has an extremely simple express~on. Recalling (AlO) for qi, we find:
dqi 1 dWi
= ai 2
Substituting this in (A14) and the result in (A15) yields:
dZ (----.-!) 2
dXj
1 (i2
i
(A20)
(A2l)
Expanding (A2l) and using (A18) yields the following reduced expression:
-1 r' k J
(A22)
When' forming the sum of the various contributions to ax2k' most terms vanish because of simple properties of matrices (l:kajkapk = Odp) and one obtains (Petit, 1962): .
(A23)
The maximum likelihood estimator has been analyzed thoroughly by Petit (1962) for the cases of Gaussian and Rayleigh statistics, which turn out to be identical. Note that the weighted least square sum (-Q') may be used to perform a X2 goodness of fit test. This sum should be approximately the number of degrees of freedom (i.e., V = N - J - 1). If this be not the case, either the accuracy of the measurement is not correctly estimated, or the statistics of the data are not Gaussian, or the fitting function is not the correct one.
Expanding from initial values X · o • J •
and the calculation proceeds, but keeping only the very second derivative we just neglected. Were the weighting factors Gi a function of xj , both possibly should be kept.
43

A.1.2.4 The iterative~radient algorithm
The linearization algorithm is very fast; however, it does not always converge. This is because 1) the increments may be too large for the linearization assumption to be valid; 2) while the objective is to maximize Q', there is no guarantee that Q' will actually increase from step to step. We now outline another method which does force Q' to increase and therefore is bound to converge at the end.
Let us expand Q' in finite increments:
Q' = L log p(w./z. ) = QO + oQ ~ ~
i -
L 1 .L dP (w/zi ) dZi oQ = dXj
P(Wi!zi) dXj aXi i j
L (L dZ. = q ~ ) ox. i dX. J
j i J
If we want Q' to increase, the surest way is to increment ox along the gradient vector, i.e., to choose:
ox. (A26) J
i
where the coefficient a must be small enough ·for the linearization to be valid. There is no really satisfactory way to formulate this condition without using the second derivatives, which are generally cumbersome. Consequently, one usually has to select conservative values for a, with the result that the convergence is rather slow.* It seems, on the whole, that an optimal method consists of using the linearization algorithm .as a rule, with a conditional and progressive switch towards the gradient method every time the first one fails to increaseQ.
It is illuminating. to compare both algorithms written in matrix form:
(linear) o~ = it-l . ' iio
(gradient) o~= a iio
(A27)
*A practical possibility is to force I 0 Q I to be a very small fraction of Q.
44
i .j ; .
\

Therefore, switching from the first to the later method means the increment vector is decreased in magnitude and rotated towards the gradient vector.
A computer program built to implement the maximum likelihood estimator at NSSL actually blends the two algorithms described.
A.2 Application to weather radar Doppler spectra
A.2.l Expon~ntial statistics
A weather spectrum contains a signal contrib~tion superimposed to receiver noise, which is supposed white (uni~orm spectral power). Both signal: and noise complex amplitude have Gaussian statistics; thus, the composite signal also has. In this case, the power spectrum has exponential statistics and the (real) amplitude obeys a Rayleigh law.
It is impractical, although possible, to work with complex time series. The real amplitude would be convenient, but for the fact that noise and signal are additive in power rather than in amplitude spectrum. .Therefore, we appiy the maximum likelihood technique to the power spectra for the sake of computational simplicity. Then we have to consider for each spectral line power the statistical probability distribution:
1 pew) = - exp (-w/w) w
(A28)
Note that if one is to deal with averaged periodograms instead of single ones, the statistics become Gaussian, due to the central limit theorem, and the situation altogether is more pleasant.
When applying.Bayes rule, the normalizing integral in the denominator is:
fwmax
p(w/w) dw =
o
jexp
w/w max
(-t) dt t
(A29)
This is a constant independent of wand therefore we maXllIll.ze the product of probabilities P by maximizing the numerator. We get for Q = log P
Q = -i
w· ]. -(- + log w.) + C - ].
Wi
45
(A30)

and for the maximum likelihood equations:
H. = J
i
W.-Z. dZ. 111 Z.2 dX. = 0,
1 J (A31.)
This is similar to the corresponding system for Gaussian statistics [Eq. (AIO)] except that the variance of the data equals the square of the expected value instead of being an independent parameter. Note that the quantity we are going to minimize (i.e., -Q) is not the weighted difference squares sum; in other words, for exponential statistics, a least squares fit does not yield the maximum likelihood solution. ---
We should now apply the Section. A.2 procedure without any simplification, since I wi - zi I may not be considered small in any sense. This does not raise any difficulty except cumbersome algebra. Nevertheless, using the assumption of s~ll I wi - zi I ' the.algori~hm does give q~ite satisfactory results for a cons1derable computer t1me sav1ng. The equat10ns then become identical to the simplified Gaussian case [Eqs. (A19) and (23)] • We have es~ t.imated the errors arising from using the simplified CA23) for the variance of the estimate and found that they seldom amount to more than 20%, good enough for practical purposes • .
Since we had to account for the window broadening, the data were adjusted to a convoluted curve, rather than a Gaussian. No particular practical difficulty arose from this modification; rather, since the fitting curves were interpolated from a library instead of computed every iterative step, more time saving actually was achieved.
Aithough the method gives what is believed to be satisfactory results, the case of weather spectra brings out difficulties that we have been able to comment upon rather than solve. Leaving out of the discussion the simplifications for numerical computations, the following are reasons why the method may hot be perfectly correct.
a) We have discarded, at the beginning, the matter of a priori probabilities with little justification. The actual reason an exact knowledge of this function is not essential_is that in any case it is broad, whereas the conditional probability p(w/w) in most cases is narrow (ex. Gaussian statistics with small variance), and thus its influence predominates. In the exponential statistics case, however, the function p(w/w) itself is -broad, so that choosing various a priori possibilities, other than uniform, possibly would 'have significant consequences • .
b) The worst problems stem from the effects of a finite time window for which the data are not likely to be statistically independen~ because in some caSPR the contribution due to a window s.idelobe comprises most 6f the power contained in a particular spectral line.
c) Although one likes to test the goodness of fit, unlike the Gaussian case, no X procedure is available for exponential statistics. We still can
46

-~---.-."---".-"-."-"-
apply a X2 test, by assuming that every wi/zi is a sample belonging to the same population ruled by an exponential distribution with expected value of unity. We have sorted the data in six intervals of equal " integrated exponential probahility and applied the test with \) = 1 degree of freedom.
The results, are not very good; they look like a X 2 distribution with \) = 3 or 4 rather than 1. This must be qualified when looking in detail at the scatter of the data around the fitting curve (Fig. Al.); in general, the test gave poor results because the fit is too good. This can be interpreted as evidence that the assumption that spectral coefficients statistically are independent is not quite correct.
While these pr~blems are significant as far as scientific rigor is concerned, their practical importance should not be over-emphasized. The loss of independency due to window effect results in poorer accuracy, be-~ause there are fewer independent spectral lines, but is not likely to produce any systematic biases. Also, we have switched from exponential to Gaussian statistics and found results similar in every respect. Therefore, we feel that, even if the method outlined here does not represent exactly a maximum likelihood estimator, it comes close to it and is likely to be superior to any simple geometrical algorithm.
A.2.2 Implementation
A.2.2.l Parameters and fitting function
a: ILl
~ ..J
~ T 10dB
1 Q. U)
. . .
o 10 20
VELOCITY m.- I
Fig. Al. Example of weather spectru~ fitted by M.L. estimator. Notegeneraliy small scatter compared to standard deviation predicted from exponential statistics. Power density scale is logarithmic.
It is assumed that the signal consists of one, or possibly two, modes in the spectrum; and those modes, in terms of expected values for the spectral line powers, correspond to Gaussian functions of the frequency. The signalis superimposed on a uniform noise pedestal, and on the whole. there would then be seven parameters (three for each mode, plus one for the noise). However, for simplicity and time saving, each mode is allowed an independent noise level. This is not a satifactory situation; nevertheless, actual resulting noise levels are close in general (see Sections 8 through 10). We have seen before that account must be taken of window broadening, thus the fitting function is no longer a Gaussian G, but the convolution G' of a Gaussian by the window spectrum (see Annex B). Since the resulting function is not analytical, it ' has to be tabulated and desired values interpolated from its table. Thus, a library was built for G'. Parameters of the library are
cr from 0.149 to 8, with logarithmic step = 2°·25 e .
47

fe from 0.125 to 608.85, with logarithmic step = 2°·125
where ae is the standard deviation of G expressed in line spacings units, and f is the frequency shift from the peak, expressed in a units. The f span i~ dictated by the fact the library must yield G' value~ up to 32 spectral lines away from the peak. The G' are normalized to unity for f = ° and available only for positive frequency shifts. Total a span was cho~en according to current beliefs on maximum and minimum a value~ and correspond to 0.159 and 8.56 m s-l for the NSSL radars, in velocity space. The logarithmic step was chosen so that linear interpolation was ' correct always within 10-4 of the peak power. In these conditions, the library consists of a quite manageable 325 cards deck. Examples of curves stored in the library are shown on,Fig. A2.
-Cii' >- 10 2
/~ z ~
ffi ~
10~ NO -WINOOW BROADENING
-0.25 I~~L.I--------~------~~~IO~------~IOO
NORMALIZED FREQUENCY
Fig. A2. Convoluted Gaussian curves stored in the library forM.L. 'spectrum estimation, for selected normalized variance values. a , standard deviation if true Gaussi~n, is in line spacing units (Le., 1. 07 m s -1); the abscissa is in a units. e
A.2.2.2 Initial value estimation
Applying the M.L. practical algorithms requires initial parameter values be available. This paragraph describes, in the particular case of the NSSL Doppler spectra, how the initial g~esses for parameters are established. We assume one or at most two modes are present in the spectrum and set out to determine whether there be one or two, and initial values of noise level, signal power, mean frequency, . and spectrum variance for each.
a) The ° frequency (D.C.) line is is removed arid replaced by a linearly interpolated value.
b) Next we eliminate the risk of one mode being damaged by folding (1. e. ,being split between both ends of the unambiguous cointerval). To this effect, a running averageS6 over six adj'acentspectral lines is computed; the line number 10 corresponding to an absolute minimum ~in for S6is determined and the spectrum is shifted in such a way that 10 becomes the first line.
We use an averageb.ecause in case of pure exponential statistics, the width of the probability density func-tion if? so large tha:tworking with un
averaged data is impractical. The exact; averaging method is somewhat arbitrary. A 6 point unweighted mean seems ·a good compromise since in the noise region it only has a 2.2 dB stanq.ard deviation, while in the signal . it ' does not have too drastic a smoothing effect fortypic~l encountered spectral widths.
48

c) The absolute maximum of S6 is located, and a zone surrounding this maximum is blanketed while the spectrum is explored, looking for a second mode. This -Procedure would be s::tjo,ple,except one must allow ·for the frequent case where': the second mode is an image • . Therefore, the blanketed interval, which conSIsts in principle of + 11 lines on either .side of the main . S6 maximum (this ' corresponds to about 12 dB down from the peak for variances of 30 m2 s-2 1. e.," .the maximum realistic usual meteorological values), is restricted actually to one side of the DC line.
~) When a secondary maximum is located, the algorithm first checks whet.her it is separated from the main one by a relative minimum located on 11, then whether its amplitude reaches a given threshold. We reject the secondary modes such that the corresponding S6 maximum does not reach at least 10 dB above- Smin, and find a quite small quantity o;f noise peaks manages to meet this criterium. On the other hand, a few real secondary peaks are unduly rejected.
e} This being done, one working interval is delineated for each mode in order to select the data for M.L. processing. This interval is normally + 25 spectral lines from each maximum, limited further by the boundaries (10 or 10 + 63) and the intermediate minimum II in case of bimodal spectra. In other words, intervals do not overlap.
£) Finally, for each mode, the initial values are computed over these intervals, as the integral, centroid and variance over the spectral segment. A threshold is set 13 dB from the peak. The noise power is estimated from .the difference between the powers above and below this threshold.
On the whole, the method was found a reasonable compromise between complexity and efficiency; its interesting feature probably is the automatic un-folding process and noise bias elimination. Yet it fails in case of either multimodal spectra (more than 2 modes) or in case of imaged spectra with frequencies close to zero. However, in the latter case, subsequent use of the M.L. estimator is possible, even down to low frequencies since the estimator is able to fit a (window-broadened) Gaussian curve when hardly more than one side of the observed curve is available. Practically, even a slight secondary minimum (i.e., 5 dB) is sufficient to identify 2 modes and insure a convergence towards unbiased velocity and variance estimates. Another important, but seldom, case of failure is noticed when the spectrum is so broad in frequency that a meaningful estimate- of mean velocity does not exist. This may occur when looking exactly into a tornado core (Zrnic and Doviak, 1975).
The actual figures given as threshold or boundaries were arrived at by reasoning, but also trial and error , which gave opportunity to test the influence of the initial values choice on the M.L. estimator output, and in particular the uniqueness of solution. The result is a unique solution when the spectrum fits the geometrical pattern that has been assumed for it. Otherwise, it is not; for example, well defined 3 modal spectra yield several solutions; also, a pure noise spectrum has many solutions. On the whole, this is not found to restrict seriously the method efficiency; only when there is a meaningful solution, is it unique; conversely if th~re are severa~all are likely to be meaningless.
49

A.2.2.3 Algorithm
The computing program is a nearly strict reproduction of the method previously desc'ribed. The following specific choices were made either to obey physical constraints or to save computing time:
--The noise level was restricted to positive values;
--Standard deviations were limited to values present in the library;
--Convergence thresholds were taken equal to 0.33 times the estimate standard deviation, except for the noise level, where it was taken to be 0.80 times this number.
--The derivatives were computed from the library G' values (using a finite difference scheme) and were in turn tabulated; there was no interpolation of derivatives, i.e., they were assumed constant between adjacent library grid points.
Some among these simplications~ although efficient and time saving, have sizable consequences, which is seen next.
A.2.3 Technical results
A.2.3.l Convergence efficiency - computing costs
Statistics over a fairly large number of spectra (about 3000) show that:
--91.2% of cases lead to convergence in less than 13 iterative steps for at least 1 spectral mode.
--Considering now only these cases, the mean number of iterations is 4.06.
--The av.erage duration of one iterative step is of the order of 0.6, s. This has been divided by 3 from · initial tests of the programs, thanks to various short cuts and simplifications indicated in the preced·ing paragraph.
--On 8 June, for the No.rman radar (considering again only convergent. cases)" bimodal spectra were observed 34% of the time. Among these" 21% were images (this is concluded when the absolute value difference between both mean frequency estimates is less than the sum of their estimated standard deviations), and 2.1% were low frequency componentspossib;J;y associlatedwith ground clutter or equipment efforts, corresponding velocities smaller than 2 m s-l in magnitude; thus leaving 11 % to be' . explained either by sidelobes, · ambiguous range returns, noise spikes or unknown causes.
We now' look more closely to the non-convergent cases. Basically, the algorithm, when' implemented perfectly, must converge; and from the above'" 12 allowed steps. seem quite enough since on the average it takes only about 4:. Thus, non-convergence cases must be assigned to constraints or imperfecti1lnR
50

in the actual program. One constraint is the limited variance span of the G' library. It is found that 11% (46%) of non-convergences occur because the algorithm is blocked near the bottom (top) of the allowed variance range. Usual cases anyway correspond to low Po signa1-to-noise ratios, and thus the convergence is meaningless. .
---another constraint is the noise level being restricted to positive values,whereas the algorithm may tend to converge towards (small) negative values. This is detected through·high spec:trum power signal-· to-noise ratios Ps (larger than 60 dB) and explains 24% of.non-convergent cases. Albeit, mean velocities and variances are correct and can be recovered through simple criteria.
--The remaining 19% are thought to be associated with the crude approximat ions made when derivatives are not interpolated. Suppose the exact solution lies near one of the library variance grid values then the algorithm might well oscillate from step to step between two locations on opposite sides of this point and result in non-convergence. There again, velocity and variance are nearly correct in spite of non-convergence. Recall this corresponds only to 2% of the' total sample.
A.2.3.2 Accuracy of estimates
One expects, since the M.L. estimator benefits from the a priori knowledge or assumption of a Gaussian spectral shape, the standard deviation of
'" '" the estimate velocity and width V and a, would be reduc~d somewhat when com-pared to the standard Fourier moment estimates. The relevant comparison is shown in Fig. A3, for velocity and on Fig. A4 for the standard deviation. Since theoretical calculations by Berger and Groginsky (1973) show these accuracies to be a function of noise level and spectrum st~ndard deviation, ~esults are presented in form of double histograms of S.D. (0) and S.D. (V) against a for low and high values of the spectrum signal-to-noise ratios.
Both dependences predicted for the moment estimator are clearly present also for. the M.L. estimator. TheA square root law computed by Berger and Groginsky for both S.D. (V) and S.D. (0) versus 0 for very high Ps values is not found, however; the M.L. estimator standard deviation seems a linear function of a rather than anything else. On the mean, M.1. estimators xonsistently are more accurate than the standard, by 25% for V and 15% for a approximately.
A.2.3.3 M.L. versus standard estimated values
One practical aim of the M.L. implementation was to decrease the current width measurements to meteorologically acceptable values. The success achieved in this ~espect can be assessed by looking at Fig. AS).. which is a double histogram of a M.L. estimated standard deviation, against app estimated through the pulse pair processing.
There are distinctly two groups of data on Fig A AS. The first group is roughly ali~ned near the aM.L. = app line although a is approximately 30% lower than cpp. This corresponds to unimodal spectra; the variance reduction, probably, is associated with correct noise adjustment by the M.L. estimator, including every contributing white noise and especially quantization noise,
51

a)
VELOCITY S.D. vs. SPECTRUM WIDTH ESTIMATE
S.D (0) m S-I
o 0.5
2
-I 3 '" E
<b 4 0.0625
O.2!5~
300 DATA POINTS
Fig. · A3 a and b. Double histogram of S.D. (~) versus ~ for, a) low, and b) high, signa1-to-noise Ps values. Dashed curve on 3b is after Berger and Groginsky (1973). The contoured guanti~y is the density of cases Rergrid · element; grid spacings [0.25 m s-l for (J and 0.06 m s-l for S.D. (v)] are indicated on figure.
b) S.D. ( v) m S-I
o 0.5
Ps> 14dB
2
3 I",
e 4 <b
5
8 647 DATA POINTS · .. .
52

a)
-I. e
<b
SPECTRUM' WIDTH ESTIMATE S.D. va. SPECTRUM WIDTH S.D. (~) m a-I
o 0.5 1.0
0.0625 6 .25172Z:1
7
. OSPa<8dB
164 DATA POINTS
Fig. A4 a, b. Same as Fig. 3 a,b for S.D. (0) versus o.
b)
I • e <b
o
7
SPECTRUM WIDTH ESTI MATE S.D. VI. SPECTRUM WfDTH S.D. ( 0-) m a-I
0.5
\ \ \ \ \ \
53
1.0
Pa > 16dS
503 DATA POINTS

o 5 6
3008 DATA POI NTS
, 5 CIO
E A.
<bA.
O.21S
10 O.em
15
,., Fig. A5. !2ouble histogram of M.L. est.imated (1 M.L. against pulse pair estimated (1pp spectrum widths.
as well as image suppression. The second group ~as no well defined shape, except it. includes cases where &pp is large and ~.L.is not. This is thought to correspond to bimodal spectra, including mostly very large images.
Thus, for well behaved spectra, variance is reduced by a factor of about 2; in other cases, the reduction can be very large, with factors above 20 not unusual.
It is, also, of interest to assess more generally which differe~ces are A A . •
to be expected between M. L. results (1 and V ,a~d the estimates made uS:Lnga simpler algori:thm. This can be doneusillgresult·sVo and (10 of the initial value computation, which is a sophisticated version of the standard Fourier moment estimator. r Figure A6 shows histograms of absolute differences between ~.L. estimates and initial values both for velocity and standard.deviations. Initial values are far from unreasonable: for about 50% of the cases, both Vo and (10 are within lll1 s -1 of the final results, while for 8% for V and 23 % for d" they are off by more than 5 m s-l.
The small contribution for 16 m s-1 in the velocity histogram includes actually all velocities with differences higher than 15 m s-l; thiscorres..;. ponds to cases where the final valu~ jumped to the other side of the Nyquist cointerval.
54

1500
til
~ 1000
~-t.:) t.:) o f:I o
i 500
100
~-IVML-VO I
WlEI-I~C~1
4 6 8 10 m 5-1
15m 5-1 AND ABOVE
Fig. A6. Absolute differences between initial guesses and M.L. final estimates for velocity and standard deviation.
A.2.3.4 Signal-to-noise ratio consideration
We first inquire whether, when processing bimodal spectra, we find similar values for the noise level independently estimated for each mode. To do this, we consider the histogram of the absolute difference between both noise values (Fig. A7). In 61% of the cases, both noise estimates are within 5 dB; however, there is still a broad scatter after this~ and for 9% of the cases the difference exceeds 15 dB. We believe that often it comes from window broadening from one peak being
'mistaken for noise when the second mode is processed. This problem, again, could in principle be solved, at the cost of considerable additional computer time expense. As generally one mode dominates and we are interested in the power signal-to-noise ratio,Qs for this mode only, these differences seem of secondary importance.
Indeed, results for P s when only the largest mode is considered, are more encouraging. The crucial test is a comparison between Ps and the input signal-to-noise ratio Po' comparison illustrated by a double histogram Ps versus P (Fig. 8). Although the data do not a~ign at all on the P = P line, there is a well defined corr~latign between both signal-to-noise ratios.
It was shown in the main text that at first sight the AID converter appeared to work as an eight bit converter. Alas, this is actually not correct since analysis of noise records shows a noise standard deviation near 8.8 levels; whereas if this was mere quantization noise, its standard deviation would be 8/213 = 2.3 levels (Schwarz,_ 1970).
A composite spectral signal-to-noise ratio was computed using AGe settings for time series from the calibration curve and accounting both for receiver input signal-to-noise ratio and quantizatlLon noise assuming an 8.8 level noise standard deviation. This curve, Fig. A8 (dashed line); represents well observed Q at low levels, but tends to resemble rather an envelope than a typical va1ue for higher P numbers. A partial explanation has to do with bimodal spectra, since the s~gnal power present in P includes only the dominant one. Rather we suggest that, since the problem wi~h the AID converter was not perfectly understood, what happened was indeed more severe than quantizationlike noise, and the actual noise standard deviation from quantization increased
55

with the level of input signal; this would explain why actual p values seldom exceed 18 dB rather than 22-24 dB as predicted. s
en I&J Co) Z I&J a:: a:: ::l g o IL. o a:: I&J IX)
::E ::l Z
100
80
1049 CASES
15.5 dB AND ABOVE
6 8 ABSOLUTE NOISE LEVEL DIFFERENCE
I n(l)-n(2) I dB
20
56
Fig. A7. Absolute noise level differences in dB obtained from M.L. estimation of bimodal spectra.
Fig. A8. Signal-to-noise ratio from spectrum power P and from the incoherent receiverps (double histogram). Continuous line ig p = P • Dashed line is a predictionsacco3nting for quantization noise evaluated from noise record time series standard deviation.
p. dB
30
3008 CASES

ANNEX B
THE TIME WINDOW '
B.l Definition and properties
Assume, we have a time series of a signal consisting of a monochromatic wave, over the time interval 0 - T:
e (t) = exp (21Tj f t) x n o
(O,T)
where n is equal to unity between 0 and T and 0 elsewhere.
Take the Fourier transform of e(t):
c(f) ~ 1- e(t) exp (-21Tj f t) dt
_00
T
=1 o
exp [21Tj (f - f) t] dt o
=T exp (j1TX) Si~~1TX) with x = (fo ~ f)
(BI,)
T (B2)
When taking the power spectrum, the phase factor disappears, the T factor has to be eliminated (since we consider a power spectrum rather than an energy spectrum) and we get:
S(f) = . 2 Sl.n 1TX
2 (1TX) (B3)
If the time series extended from - 00 to +00, the spectrum would be a Dirac distribution o(f ); the fact we have another function in (B3) is associated with the time in~erval being finite. This function is the power spect:rum of a rectangular time window for continuous data.
Consider now the case of discrete sampling:
e = exp C21Tj f not) n 0
with 0 t = TIN, n varies from 0 to N-l.
Form the Fourier series:
c = k
N-l
n=O
exp 21Tj (f n at - k n afat) o
57
CBS)

We know that only N independent coefficients exist (Gold and Rader, 1969), and they are obtained by choosing:
then
1 1 of::;:: -::;:: - '-T NoT
N-l
n=O
exp [2rrj n(q-k)] , N
with q ::;:: f / of. o Summing up this series yields:
1 - vN ck = 1 _ V with V ~ exp [21Tj (q-k)]
N
Taking the power spectrum, we can express C with square sine functions and obtain:
We may also resolution;
10-4
o 5
2 Sk = sin 1Tx with x = q-k
sin2 (1Tx!N)
oversample in frequency in order to achieve a better frequency
let us choose: of = N70T = p~OT with p> > 1; then Eq. (BS) results
again, with: x::;:: (q-k)/p, and the
10 15 20 25 30 SPECTRAL INDEX II
~ function (B8) is the powerspectrwm of the rectangu~ar time window for discrete data.
58
Equations (B3) and (B8) are plot...,. ted on Fig. Bl, assuming N ::;::' 64 ~nd fo ::;:: q ::;:: 0. , They are identical for small values of x but differ whe~ x becomes of the order of N.
Both formulae help to visua~ize the broadening effect a,ssociated to the rectangular ti~e window, fora monochromatic signal. Because of the lobed structure of windowspectra~ this effect depends critically on the exact
.. , Fig. BI. Rectangular time windo~ power spectrum for continuous and disc~ete (64 line samples) cases.

'->
frequencies f'or which Fourier coefficients are computed. For example, assume o~ = liT for discrete sampling; if q is integer, then Sq = N2 and Sk#q = 0; there is no window effect. Conversely, the broadening reaches a maximum when the signal frequency lies just in the middle of an interval between two spectral lines (Le., q + 0.5 is an integer). It may be convenient to· associate the window effect magnitude for a sine wave with the signal phase difference at both ends of the time series interval; saying there is no phase difference (both ends connect without Oth or 1st order discontinuity) is equivalent to stating q is an integer.
If the input is changed from a sine wave to a finite width spectrum signal, the convolution theorem applied to formulae (BI) or (B4) tells that, in the spectral domain, one obtains the convolution product of the true spec.,... trum by the window spectrum. It is well known that a convolution is additiv~ for variances. This is the rigorous way to express window broadening. The previous discussion applies in a qualitative sense to every window type. Window spectra, generally; have lobed structure. For evaluating the importance of window broadening of finite spectrum Width signals, it is relevant to consider the envelope rather than the fine structure. In the case of the rectangular time window (often called the Bartlett window), this envelope behaves like x-2 for large values of x [this is also approximately true for the digital window (BB)]. Assuming the true spectrum is Gaussian shaped, it is clear that away from the peak the window broadening prevails. Inother wotds, if there is no background noise, the power present in spectrai ranges remote from the mode is entirely due to power from the mode vicinity picked up by remote window sidelobes. This is assessed quantitatively next.
B.2 Numerical results for rectangular time window
B.2.1 Window width as a function of time series length
Figure B2 shows how the width aw of discrete window function varies with the number of time samples N = 2n , n between 5 and B. This was obtained using an oversampled spectrum and assuming q = 0 (since the frequency resolution is very high, there is always a spectral line very near the input frequency). Alt.hough aw (computed over one unambiguous frequency interval), increases with N, the ratio aw/N, which expresses window broadening in terms of the total available bandwidth, decreases rapidly with N.
From now on spectrum width and variances are expressed unless otherWise specified, in dimensionless units; that is, the interval between spectral line o~, and the square o~2 of this quantity, respectively.
B.2.2 Independent frequency sampling
In reality, one does not most of the time, compuce many (correlated) Fourier coefficients, but as little as possible, i.e., N' =~. Then, the exact location of the input signal with respect to spectral lines becomes relevant to the broadening effect. However, one would expect this influence to decrease when considering finite width input spectra rather than pure sine waves, since sidelobe oscillating effects then should be smeared out through the convolution process.
59

4
3
-~ DO -b ::r: 2 I-0 -3:
o~--~~~--~--~ 5 6 7 8 2" SAMPLES
Fig. B2. (J in oR) units, standard deviation of Bartlett window spectrum width for various numbers of time .samples.
We now concentrate on the case of Doppler spectra routinely recorded and processed at NSSL, where N' = N = 64. Guassian spectra centered at various' locations with respect to a spectral line have been convoluted with the window spectrum for increasing values of spectrum variance (J2. Results shown on Table Bl, in terms of the difference (J-2_ (J2, between variances (J-2 and (J2
after and before convolution. For a monochromatic wave, the variance increase due to window ranges from 0 to 9 o~2. As the spectrum variance (J2 increases, these fluctuations diminish and practically di~appear as soon as (J
becomes of the order of (J~. The stable limit then obtained for (J- 2_(J2 is 4.45, nearly identical to the value obtained with over frequency sampling (1. e. , 4.3 (J~2, see Fig. B2). The apparent decrease in window broadening when (J
increases above 1.6 has actually nothing to do with the window, but is explained by the fact that the Gaussian itself is truncated at + 32 lines; variance contributions from outside this interval are missing, and this effect ~as not considered in the numerical calculation. Normally, far remote wings of the spectrum should be folded back into the spectrum unambiguous interval, and this effect would then disappear.
B.2.3 Apparent window noise and signalto-noise ratio
A Gaussian spectrum modified by window effect has the shape illustrated by Fig. B3(a); the mode is still sharply peaked, although slightly broadened~ and there is a background of spectral power decreasing slowly away from the mode. * Let us fo:rget we know this
background tc? be due to window sidelobes and interpret it by the presence of whiten.oise, . ~s one would naturally do from a quick look at the spectrum. We nowinquire¥'hat would be the corresponding signal-to-noise t::atios Pi in terms qf power density peak/backgroW:1d and Ps in termS of total spectral powp.r, noise and signal areas being defilied as shown on the figure. .. .. .
*We assume , here · the sp.ectrumis centered near zero frequency: it is always possible to obtain this situation by properly sniftingthe frequency origin and unfolding aecordingly part ef the spectrum, as shown in Annex A.
60 .

True Gaussian Variance
0 0 2
-0 0
0.05 0.0025
0.1 0.01
0.2 0.04
0.4 0.16
0.8 0.66
1.6 2.56
3.2 10.24
6.6 40.96
TABLE B-1. Influence of mode location upon Window broadening.
ot ~ 0
0
0.22
0.796
2.42
4.26
4.45
4.44
4.-38
3.91
Distance from nearest spectral line (at)
to)
0.1 .0.2
0.85 3.09
1.07 3.18
1.53 3.33
2.80 3.82
4.28 4.37
4.45 4.44
4.44 4.43
4.37 4.37
3.90 3.90
0.3
5.86
5.70
5.53
5;03
4.48
4.43
4.43
4.36
3.89
(b)
V a 0 .. 2 81--0.6 V + VW2a7.27
SPECTRAL LINES
0.4 0.5
8.12 8.99
7.70 8.44
7.26 7.90
6.01 6.36
6.57 6.60
4.43 4.42
4.42 4.42
4.36 4.35
3.88 3.87
Fig. B3 a: Window broadened Gaussian half spectrum, interpreted as superposition of neise and signaL · b: Half spectrum of narrow window broadened Gaussian spectrum centered 0.4 oi away from the nearest spectral line. Note total variance is larger than in Case a.
61

Table B2 indicates that for typical a values the power density ratio in dB below the maximum is in the vicinity of 30 dB. The integrated power signalto-noise ratio p is not tabulated because it is found to be 20 dB, independent of the spectrum ~ariance.
TABLE B-2:
(] 0.25 0.5
p . dB 40 37 I
Apparent signal-to-noise spectral density ratio due to the window.
1 2 4
34.5 32 29
8
24
This means that when exam1n~ng Doppler spectra, one should not hope to see often a background noise far below 30 dB because it would then be masked by window contributions. Similarly, comparison between-independently measured SNR values P and "eye ball" estimates from the spectrum are unlikely to agree when p gxceeds 15 dB.
o
B.3 Window convolution
We have just seen that, except for low a values, the rectangular time window for 64 points brings a 4.4 62 variance contribution. This corresponds for the NSSL radars to 4.7 m2 s-2, i.e., a large number, in terms of meteorological broadening factors. Thus, the window effect must be removed during the processing if any meaning must be assigned to the variance computed from spectra. Three actions are possible in this connection; deconvolution, reduction of window effect by various correcting techniques, and a posteriori correction. We now deal with the first one.
It must be seen that deconvoluting the window is hopeless unless some a'priori assumption or knowledge is available. This is shown most clearly in the autocorrelation domain. When N time samples are available, one can only get autocorrelation values for N time lags (including 0). Since the only ob-
.jective way to cancel the window effect is to increase N to very large values, one should then extend this function for longer time lags; it is necessary to hav~--a rule to perform this extension. .
The above was an intuitive way of presenting the deconvolution problem. Mathematically, we must solve:
S(f) * W(f) = S'(f)
where Sand Ware the signal and window spect~a, S' is the convolution product. This is a Fredholm integral equation and it does not have a unique solution. because the data S' are only available on a limited frequency raI).ge. Therefore, some restrictions or hyp.otheses must be made " to s(}lve this equation.
In the present: work, this extra hypothesis is the Gaussian shape assumed for the weather spectrum. Then, the maximum likelihood approach suggests a very simple method; use in the adjustment the convoluted spectrum S' rather than S(f).
62

Of course, S' cannot be expressed analytically, so it must be tabulated, . and interpolated from the table for practical use. For the NSSL application, the S' library was computed assuming consistently the Gaussian to be centered on a spectral line. According to Table BI, this is not really acceptable for (J values < 0.4. What is go.ing to happen then, is that the variance will be adjusted correctly [see Fig. B3(b)), previous page) but part of window background will be interpreted as noise, which thus will be consistently overestimated.
Although it would have been better tc;> cancel, at least in the average, this error by selecting a Gaussian centered on 0.25 rSt for example rather than 0, this is not of serious consequency here since first we are interested in variance rather than noise level; besides, (J values < 0.4 are not that frequent.
Figure B4 shows an observed Doppler spectrum adjusted to a Gaussian (a) and a convoluted Gaussian (b). The fit is significantly improved and the (J estimate is distinctly smaller in the second case, while the noise level estimate is decreased by 5 'dB. Note there is an image spectrum; since both modes are adjusted independently, it is not possible to account for both window broadenings at the same time. What actually happens, and is seen in this figure, is, window sidelobes from the main mQde contributing to the apparent noise level for the smaller one. Alternative and conceivable deconvolution schemes (Le., autoadaptative filtering) involves somewhat obscure assumptions and deserve further assessment.
(b) WITH WINDOW CORRECTION cr-0.95ms-1
ps '7dB
cr=1.47ms-1
P8= 1I.3dB
-~ -~ 0 ~ SPECTRAL LINES
20
T 10dS
1.
Fig. B4. M.L. adjustment of a parti. cular experimental spectlium using a) a Gaussian curve; b) a convoluted Gaussian curve.
B.4 Window broadening ~eduction
To think large amounts of Doppler data could be routinely processed using the M.L. process would not be realistic, and therefore methods to correct the window effects in simpler treatments must be examined.
Normally, spectrum width "Fourier" estimate is computed as the periodogram variance (after eventual unfolding). We are led to examine possible modifications to this estimator.
An important difference with the M.L. process has to do with noise. In the M.L. process, an independent parameter is assigned to noise background level and thus, every signal spectrum parameter estimate is unbiased by noise. When using spectral methods, this is no longer possible; both mean velocity and width estimators are biased by noise.
63

B.4.l Band limiting
The noise bias on mean velocity can be practically removed by first unfolding the spectrum (see Annex A) and then "band limiting", i. e., choosing a limited frequency interval symmetrical with respect to the first guess for mode frequency.
Band limiting also, has a reducing effect on the variance. Table B3 shows the variance reduction for selected variances and (fixed) total spectral line number values. If one is to choose a band limit so as not to severely underestimate large variances, at least about 30 spectral lines must be conserved, and the resulting variance reduction is not very large. Besides, this reduction tends to be larger (at least in a relative sense) for high variances, so that there still is the risk [illustrated by Fig. B3(b)] of mistaking a narrow spectrum centered midway between two lines with a broader spectrum. Finally, this procedure would, in case of small SNR, leave a substantial bias due to noise variance contribution. On the other hand, spurious noise peaks, which would have a disastrous effect-on variance are eliminated.
One can be more sophisticated and select a variable frequency interval. On Table B3 also are shown results when the frequency interval is limited to + 2.5 o. The results are much better; it only remains to determine a first o guess which would yield satisfactory bounds for band limiting. It is seen readily that band limiting with a fixed interval does not produce a very efficient guess.
B.4.2 Thresholding
An alternate procedure is to threshold spectral line powers before computing the second moment. When one is considering thresholding as a way to suppress noise contributions, it seems better to choose the thresholding level wit~ reference to the noise level, although in practice, this is not easy. When considering the window, however, the question does not arise; the threshold has to be set with reference to the spectrum itself, the simplest way ' being to select some level below the spectral peak. .
The effect of thresholding is illustrated by Table B4 for various threshold levels. The window variance reduction appears substantially larger than for (fixed) band limiting. A correct threshold should not lead to a large underestimate of large variances, thus the best trade-off seems to be around 15 dB. For this level, relative variance biases are still very large for low o values, but 'at least there is no risk of misleading a case (narrow mode ' centered midway between spectral lines) with a case (0 ~ 1.6). The variance bias is of the order of 0 2 for 0 ::;:0.5, and becomes smaller than O~l 0
2 for o >1. 2.
Actually, the threshold cannot be left at 15 dB in presence of noise, when the SNR and variance are such that noise spectral density exceeds this level. Id.eally,one should then adjust the threshold at the minimum level insuring nois.e elimination. As long as this does not lead to thresholding separation smaller than 10 dB, no serious consequences restiltexcept in .cases
64

of exceptionally broad spectra. This is nota strong requirement, since it corresponds to an integrat;ed SNR P of about 0 dB (fpr a typical (J value of 2, sp~ctral density signal-to-nois~ ratio Pi is 11 dB above ps).
TABLE B-3. Bias of variance estimate with band1imiting (SIN = 00)
I Frequency band (number of spectral lines)
I Peak ±2.5 cr I Location 5 13 21 29 37 64 I
I 012
- 022
I cr = k02= ) (observed) (true)
-0.0025 I 0 0.015 0.038 0.058 0.08 - 0.106 0.22 I I 0.05 0.1 0.09 0.20 0.30 0.41 0.52 1.07 I
-0.0025 kO.025) 0.2 0.26 0.57 0.88 1.20 1.56 3.18
I I 0.3 0.68 1.03 1.57 2.16 2.82 5.70 I I I
I
-0.0025 I
0.4 0.66 1.38 2;12
I 2.92 3.81 7.69 ,
I i 0.5 0.72 1.50 2.32 3.20 4.17 8.44 I I 0.1 0 ! _ 0.05 , 0.13 0.21 0.29 0.38 0.80 -0.01* I I
1(0.01) 0.1 I 0.12 I 0.27 0.42 , 0.57 I 0.74 1.53 I
I I 0.2
j 0.27 I 0.60 0.92 1.26 1.64 3.33 -0.01" I
I 0. 3 0.47 1.00 1.53 2.10 2.73 5. 53 I I I
7.26 -0.01* 0.4 0.63 1.31 2.02 2.76 ----:;;00--I
0.5 0.68 1.41 2.17 3.00 3.92 7.90
-0.2 0 0.16 0 .39 0.63 0.89 1.17 2.42 -0.04*
(0.04) 0.1 0.21 0.48 0.75 1.04 1.37 2.60
0.2 0.31 0.67 1.04 1.44 1.88 3.82 0.13
0.3 0.43 0.91 1.39 1.91 2.49 5.03
I 0.4 0.53 1.09 1.67 2.29 2.98 6.01 0.25
0.5 0.57 1.15 1. 76 2.42 3.15 6.36
0.4 0 0.33 0.73 1.15 1.6 2.09 6 .26 0.12
(0.16) 0.5 0.38 0.81 1. 26 1. 74 2.27 4.60 0.16
0.8 0.2 0.33 0.76 1.20 1.67 2.18 4.44 -0.12 (0.64)
1.6 0.2 -0.25 0.71 1.17 1.65 2.17 4.43 -0.25 (2.56)
3.2 0.2 -6.77 -0. 86 0.93 1.51 2.06 4.37 0.85 (10.24)
6.4 0 .2 -37 .-1 - 25. 1 -12. 5 -3 . 7 0.32 3.90 2.81 (40 .96)
NOTE: *On1y one line left in limited band.
65

TABLE B-4. Bias of variance estimate with res 0 l.ng
I Thresholding level (dB below peak) cr Peak
th hId"
(cr 2 ) location
of 10 15 20 00
---0.05 0 -0.025* -0.025* -0.025* 0.22
(0.025) 0.1 -0.025* -0.025* 0.02 1.07
0.2 -0.025* 0.07 0.15 3.18
0.3 0.15 0.28 0.42 5.70
0.4 0.22 0.40 0.76 7.69
0.5 0.34 0.63 1.01 8.44
0.1 0 -0.01* -0.01* 0.01* 0.80
(0.01) 0.1 -0.01* 0.03 0.04 1.53 ; .
0.2 0.07 0.07 0.16 3.33
0.3 0.15 0.28 0.41 5.53
0.4 0.22 0.38 0.72 7.26
0.5 0.24 0.60 0.95 7.90
0.2 0 -0.04* ,... 0.04* - 0.04* 2.42
(0.04) 0.1 -0.04* 0.07 0.11 2.·8
0.2 0.09 0.12 0.22 3.82
0.3 0.15 0.26 0.38 5.03
0.4 0.19 0.33 0.61 6.01
0.5 0.21 0.35 0 •. 64 6.36
0.4 0.0 0.12 0.12 0.23 4.26
(0.16) 0.5 0.09 0.23 0.33 4.60
0.8 (O~ 64) 0.2 -0.06 0.19 0.39 4.44
·1.6 (2'.56) 0.2 -0.25 0.20 0.52 4.43
3. 2(1~;., 24) 0.2 -1. 36 0.16 0.71 4:37 ,
6. 4 ( 4;Q" 96) 0.2 -6.27 -1.15 0.89 3.90
NOTE: *Only one line Ie-ft above threshold.
66

B.4.3 Windowcorrection
It is possible in 'principle, having tabulated all biases, to estimate the width in some way and tO , correct for biases after the fact. This does not seem very practical however, since many parameters are to be considered, specifically: estimated width, mode location with 'respect to the spectral lines, noise level, the last one being very difficult to determine with adequate accuracy. Further, if any thresholding or band limiting is part of the process, it has to be accounted for also. Most of all, we have " ignored statistical errors, but they are not negligible in fact, and make the process of determining a small width by subtracting from a large ' measured number a somewhat hazardo~scorrection. For all these reasons, systematic bias correction has nO.t been considered in detail here.
We have window, with periodogram.
B.5 Conclusion ,
investigated the effects on the spectrum of a rectangular time specific application to spectrum width biases, in the 64 line .
We find that:
R,) Decoilcolving the spectrum with the aid of a M.L. estimator allows a complete elimination of window effects. This is valid under the Gaussian Doppler shape hypothesis. Although the process can in principle, succeed even for very narrow spectra, the particular algorithm built at NSSL does riot estimate correctly the noise level for (J values smaller than about 0.25 ole
bl Concerning the second moment estimator, it is possible to correct most of window broadening by thresholding and band limiting the spectrum. For thresholding alone, the optimum level is around 15 dB below the peak for Ps higher than a few dB. It is not easy to determine the peak level either, and this should be done after the spectrum power has been averaged over a few adjacent lines, in order not to be widely in error due to statistical fluctuation. Thresholding can be accompanied advantageously by a band limitation to about ± 15 spectral lines from the mode (for NSSL radar operation parameters).
There are other possibilities of combining both methods; for example, a first passage with a threshold might give an initial variance value which would in turn be used to select a frequency band limit in order to make an improved estimate.
It is worth pointing out that, also not clearly stated, these techniques assume implicitly that the spectrum is "bell" shaped, with rapidly decreasing power away from the peak. Such assumptions are not as rigorous as in the M.L. estimator where the curve is assumed Gaussian, but they are of the same nature. Complicating more and more a scheme to compute the second moment with the help of such devices as threpholds and band limitations would resemble more and more the M.L. estimating techniques. In any case, such procedures do not seem able to cope adequately with variances smaller than about 0.6 (ol)2
67

Note we have further assumed implicitly in practice, that actual variances do not exceed 40 O~2 (same as the M.L. process library has an' upper limit). If this be not true, both methods fail ~nd one must be content with an objective estimator such as the unmodified second moment calculation or the pulse pair estimator, allowing then for exact noise correction. Such cases are very seldom, but do seem to occur in presence of extremely large velocity shears.
Finally, the question arises whether another type of time window would be more appropriate to the analysis of Doppler weather spectra. This has not been investigated in detail here. The rectangular (Bartlett) window features at the same time the narrowest central lobe and the highest sidelobe level (leaving aside the rectangular lag window which is not practical), (Blackman and Tukey, 1958). Any other window deteriorates, somewhat, the frequency resolution and produces a systematic variance bias, even with thresholding, of about 1 O~. This has to be balanced with a considerably better sidelobe protection. Clearly, for well behaved spectra the case of large variances need not" be considered, since even the Bartlett window does not produce large biases, and one should discuss variances near to or smaller than O~2. At first sight, we feel that no appreciable gain in this area is likely to be achieved by use of a more sophisticated window function. On the other hand, if one looks for steep spectral power variations, such as might be present in the vicinity of a tornado vortex (due to the tornado signature being superimposed to the ambient storm spectrum), being immune from window contaminat,ion over a wide ~ynamic range might be useful. A detailed investigation of this situation is certainly in order.
68

ANNEX C
NORMAN ANTENNA PATTERN MEASUREMENT
C.1 Experiment
A full antenna pattern measurement was needed to test the possible influence of side10bes in producing spurious noise or spectral modes into the spectra. This measurement was conducted on October 17, 1974£dr the Norman· radar u~;ing a horn mounted on the top of a building, 3.5 km away from the radar site at a 0.6 elevation. The radar scanned within + 15° of the line of sight axis in azimuth and the elevation was incremented manually by 0.2 0
steps from 0 to 12 0 between successive azimuthal scans. Measurements were taken approximately every 0.2 0 in azimuth and use was made of the logarithmic receiver,(which yielded the appropriate dynamic range).
The sequence of operations was as follows:
-Calibration run, by 1 dB step;
-Full .antenna patte~ measurement;
-Calibration run by 5 dB step;
-Pattern measurement, limited to one horizontal section throughout the main beam;
-Calibration run, by 5 dB step;
-Antenna pattern measurement between 0 and 20 elevation after transmitting horn had been moved upwards by about 6 m and backwards by the same amount.
This latter part of the experiment was aimed at the assessment of multiple path effects. The geometry of the experiment is sketched in Fig. C1, where h1 = height of the center of the antenna reflector, h2 = height of the transmitting horn, t = distance between radar receiver and transmitter. In the NSSL pattern measurement, approximate values for h1' , h2' and tare 15, 50, and 3500 m, respectively. .
------RADAR
HORN
......0-
It is easily seen that, for a reflection occurring somewhere between 01 and 02, at a distance 11= at from 01, the path difference between direct and indirect paths is*:
Fig. C1. Antenna pattern experiment geometry.
*The reflection point is assumed not to lie very near path extremities.
69

h 2 h 2 ~ + __ 2 ___ (h2-h~)2]
0'. 1-0'. ..L
(Cl)
hI If the ground is horizontal and smooth, reflection will occur for 0'.= hI + h2 and:
We suppose the transmitter coordinates h2 and i vary, producing a change OE inE. Expanding to the first order, and using above numerical values, we get:
Clearly, it is impractical to achieve a change in E by moving the horn horizontally. On the other hand, it proved feasible to move it vertically by about 6 meters which provided the desired change inE of the order of half a
. wavelength.
C.2 The calibration runs
While calibrations are essential to a successful pattern measur~ment, they are also important with respect to the quality of radar data and, therefore, deserve some attention.
Fig. C2 shows the main result integrator values averaged over 512 gates of the 3 calibration runS. It is seen they are perfectly consistent and we shall therefore, from now on,concentrate on the f:Lrst one, which is the mostaccut"ate . The range of the log amplifier was apparently well centered, as witnessed -by the smoothness of the noise-signal tra~sition in the bottom and the hard limit probably due to the digital converter itself.
The average slope of the central portion of this curve is about 1.22 dB-I; one therefore expects some levels to be missing. This is indeed the case, expecially in the curve upper half where sometimes two adjacent levels are absent. However, an histogram of all pattern measurement data
70
DIGITAL INTEGRATOR CALI BRATION
60 NORMAN f8 OCTOBER 1974
40
20.
CALIBRATION TIME 1-9'40 CST 2-10:19 " 3-10:37 •
·0 -130 -120 -100 -90 -80 ';'70 -60 .. 50 -40 TEST SIGNALdBM
i
Fig. C2. Digital Integrator (D.l.) calibration curves during the pattern measurement. Curves are shifted in ordinate by 5 D.l. digits tor clarity.

I I 1 I: i
shows that almost every number, is there; irregular steps in the calibration curve are probably due to slight errors in adjusting the level of calibration signal.
It is not clear why (supposed) digital saturation occurs for 62 whereas one would expect 63. More disturbing is the fact that the response curve on Fig. C2 is 'distinctly "s" or "knee" shaped, rat~er than linear; the sl~le varies from 1.43 dB-l (between -95 and -75 dBm 1nput power) to 1.12 dB , (between -70 and -50 dBm). This anomaly, in calibration curves, could ' be due either to a non logarithmic behavior of the receiver or to a slightly erroneous calibration of the attenuator itself used for the measurement. In absence of relevant knowledge, the response curve has been accepted as genuine for the radar receiver, after smoothing the upper half of the curve.
C.3 The radiation pattern
To eliminate antenna pattern data voids, we assumed that the pattern did not' vary much over ± 0.1 degree, and therefore, averaged the data taken .20 apart using a triangular window with a 0.2 deg half power beamwidth. Clearly, this procedure, while not damaging much the sidelobe pattern, deteriorates comparatively much more the measurements pertinent to the ma~n lobe, and this must be kept in mind.
Figure C3 shows a horizontal pattern section through the main lobe axis for all 3 measureme~ts, as well as an older analog chart recorder measurement (Spring '73).
These curves exhibit a strong similarity. However, some of the limitations due to azimuth and echo power quantization are immediately apparent, mostly on the main lobe where an unrealistic step is present in the run B curve. The general curve B shape agrees well with the 1973 measurement. However, the first left sidelobe is 1.5 dB lower. Also, there is a general -.3 degree shift of the whole left side, possibly due to antenna rotation rate variation or the chart recorder velocity during the 1973 measurement. Such a shift is not present on the right side. The side lobes appear somewhat smaller on the average, but within 2 dB most of the time.
Curve C exhibits a broad, flat main lobe and sidelobes consistently 2-3 dB higher than Curve B. The likely explanation is that,elevation is not centered exactly on the main lobe.
Curve D corresponds to the pattern recorded after moving the horn. The main lobe apparently shifts by 0.2 degrees, and the first left sidelobe is up one dB. Othe!wise, no major difference appears; indeed curves Band Dare more similar than Curves Band C. This comparison is carried on more quanti-tatively in the following section. "
In conclusion, we suggest that, provided a main lobe precise description is not attempted, this pattern measurement does not seem drastically affected by mUltiple path interferences*, and can be used for quantitative assessement of sidelobe effects.
-'ruis conclusion must be qualified due to potential complexities in reflection
71

o
~ 10 :::> ~
~ 20 ~
3= 30 9 w al
al "0
ffi 50 ~ a...
fa 60 > w frl 70 a:::
OdS A - 1973 MEASUREMENT B - FIRST MEASUREMENT (1974) C -SECOND II II OdS D- AFTER MOVING HORN
OdS
Ode
80L---.l.-------L-----...-L-----..lL..-----~~--10 -5 0 5 10
DEGREES FROM AXIS
Fig. C3. Antenna pat,tern versus azimuthal angle for source of maximum gain elevation (0.6°). PatternC obtained 30 min after B. Pattern D obtained after transmitting horn was moved up about 6 meters. Vertical scale in dB shifted by 10 dB steps for better clarity.
Figure C4 shows the whole measured pattern, which actually extends on the horizontal from-16.6 to + 13.6 degrees and on: the vertical from .,.11.6 to 0.6 degrees from the main axis. With respect to the above considerations, diagram accuracy is thought to be, on the average, + 1.5 dB in magnitude and + 0.1 degrees in position. The overall pict:ure ' seemssatisfactory in t~e sense there is very good continuity throughout the pattern, with a consistent decrease away from the main lobe. The diagram is far from annular: highest side10bes have an angular extent smaller than but comparable to the main lobe and distributed along the main axes (vertical and horizontal) and at ± 30
,degrees from the horizontal. Near the main beam the first species prevails, while away from it the opposite tends to happen. ' We shall not dwell onthi.s pattern structu;re, ' for which no evident explanation is available. There is little doubt, though, that the fOur legged structure supporting the focal feed and the primary illUmination law, . aTe instrumental in building this particular secondary pattern.
path; a.LSO, achieved phase difference was - 'IT12 when - 'IT/4 possibly would pave been more sensitive to interferences.
72

-10 AZIMUTH (DEG) 10
-10
ONE-WAY
Fig. C4. Full pattern measurement result. Data were smoothed using a Shuman nine point formula. Lines of equal power below maximum are spaced by 6 dB.
C.4 Sidelobe effects assessment
To predict actual sidelobe returns, the two-way sidelobe antenna pattern has to be cross-correlated with the reflectivity pattern at a given range from the radar. Since this 0 map itself is provided by the radar with an angular resolution corresponding at best to the antenna main beam, i.e., about one degree, there is no point in keeping a 0.2 degree angular spacing. Therefore, the pattern was integrated in each square degree and then normalized to the ·corresponding (one- or two-way) integrated main lobe contribution. This, of course, is defined somewhat arbitrarily. From Fig. C3 and C4, it seems reasonable to admit the main lobe is circular with an angular diameter of .two degrees, corresponding roughly to 19 dB below the one-way pattern peak.
TableCl shows a comparison between integrated one-way patterns during the first and third measurements (that is, for different positions of the transmitting horn). The results, normalized as indicated, are expressed in dB.
This table aims to quantitatively assess overall accuracies which .mainly depend on multiple path propagation effects; indeed, other errors should become negligible after averaging over one square degree (that is 25 values). Out of 50 data pairs, four differ by more than 3 dB. The, largest disagreement (7.3 dB) occurs within the immediate main lobe vicinity and a slight difference in elevation might be indicated here. The mean difference is 0.88 dBZ. This figure presents an overall estimated measurement accuracy.
From now, we concentrate on first measurement "B" results which after averaging extend to -11 degrees away from the main a~ds in elevation and +11 degrees in aximuth. A symmetry around horizontal axis is assumed to obtain the diagram upper half which could not be measured.
73

TABLE C-l. One-way power in dB below the main lobe; co t ib t' f h n r u ~on or eac sguare degree
'- \ 1st Measurement "B" 3rd; 'Measuremen t "D" lie = 0 - 1 deg M = 0 - 1 deg
-12 35.15 34.54 35.79 37.27 -11 34.04 32.51 35.91 32.14 -10 33.42 34.24 35.45 34.55 -9 34.69 35.47 36.05 35.32 -8 38.98 36.86 37.16 38.58 -7 29.29 37.00 27.12 34.78 -6 24.63 31. 62 28.28 31.65 -5 27.96 32.73 30.19 32.01 -4 25.20 30.98 25.32 28.34 -3 26.74 30.65 . 27.11 31. 76 -2 23.36 30.00 23.29 29.61 -1 9.12 24.72 8.53 17.44
0 1.02 14.36 1.61 11.63 1 15.24 25.95 17.29 26.95 2 27.23 28.02 26.92 2Q.67 3 27.95 31.50 28.79 31.55 4 23.77 30.10 24.81 30.72 -5 24.23 31.81 26.72 33.14 6 28.78 32.46 29.63 31.54 7 28.46 33.43 33.67 35.39 8 35.02 34.15 35.58 35.02 9 34.88 36.92 35.43 37.95
10 39.27 36.94 ,42.62 38.38 11 44.15 35.30 44.04 36.85 12 . 40.72 37.45 41.54 37.87
'The total sidelobe ratio to main lobe power for the one-way pattern is 0.20 (assuming uniform source field). This value must be considered with some caution bec~use it is sensitive to the main lobe exact delineation. It is,
, however, compatible with antenna efficiency estilllates ranging from 50% to 60%~ a .rough calculation shows the remaining solid angle contribution is probably comparable in order ot magnitude to the sampled solid angle portion.
In a radar configuration, if the antenna gain function in a direction e, <Pis f (e,<p) , the echo intensity is proportional to tpe two-way gain integral ' ;r;rf2 (8,<p) ded<p. This quantity was estimated splitting as before the pattern into main and sidelobe areas.
The rat.io
/2
R = sidelobe,s f (8, p) main lObe! f
2(8,<P)
de dp de d<p
computed over the available 25 degree square~ is found equal to O~007, approximately 31.5 'dB. This important figure tells us:
, -, * . . , In the radar case, estimated contributions from outside this region are entirely ,negligible.
74

-In a uniform reflectivity field, effective signal-to~noise ratio due to sidelobes can be as 10was 3l~S dB;
In the same conditions, assuming sidelobe returns have a uniform spectral power
i maximum spectrum variance contribution deduced. by (16) is 1.09
m2 s- (velocity bias is negligible).
The additive width is on the high . side because the uniform spectrum is unrealistic. Most of the time, one does not observe reflectivity "holes" but rather "walls" so that only half of sidelobe pattern matters and still less if the main beam elevation is low (as part of the pattern is then directed to-wards the ground). Also, the actual velocity distribution is of prime importance when assessing sidelobe affects. Most of the time, the radial velocity field is not subject to severe shear and has sidelobe contributions compounded to the main lobe return. Even in case of significant shear, one should not expect the mean velocity resulting from sidelobe contamination to be different from the true value, in general.
We have integrated the two-way radiation pattern over every square d;~,gree (Fig. CS). As before, sidelobe returns are expressed in dB below the main lobe (two-way) contribution. Every number under ,~6S dB was discarded for clarity. This diagram confirms that most sidelobe responses concentrate on or near the main (horizontal) axis; specifically, SS% of returned power 0riginates wit'h 3 degrees from beam direction, while lS% is concentrated within O.S degree of the main axis outside this central area.
It is not possible to reach specific conclusions without acc0untingfor exact reflectivity and velocity field structure as partially attempted in this work. In general, we found that near sidelobe contamination could be
, detected only if reflectivity gradients
ELEVATION (DEG.) -10 -5 o
63 5462· 64
6261 54 64
64
61 60
-10
54
50 54 48 54 -5
475949
625846 47 5
63 56 625463 6355
66
10
Fig. CS. Two-way sidelobe returned power per square degree.
of the order of 20 dB/degree are pre- . sent. Sidelobe returns then induce, in presence of larg~ shear, a nonnegligible broadening of Doppler spectra (Waldteufel, 1975).
This shows the extent to which one should worry about effect of close sidelobes. On the .other hand, remote sidelobes (Fig. CS) return, as far as 90 off the main axis, power down by only SO dB. In view of the large reflectivity dynamic range present in severe storms, this means that sidelobes might well limit the actual sensitivity and dynamic range of a radar in the surroundings of the storm volume and, in presence of velocity gradients, produce erroneous measurements of velocity fields.
7S

C.s Conclusion
We described the pattern measurement experiments, some problems encountered and results in terms of the pattern itseLf and sidelobe influence assessment. Although exact evaluation of this influence requires knowledge of specific reflectivity and radial velocity fields, we conclude that generally sidelobes are not important unless strong reflectivity gradients (20 dB/degree) are present; even then, while spectrwn variance estimates may often suffer, a large error in mean velocity is less frequent.
One case when this might not be true is when ground targets are detected through sidelobes. Fortunately this phenomenon has a distinct spectral signature, which allows in principle, its removal. It would be worthwhile to examine carefully observations above areas where ground targets are known ~o exist. In particular, a pattern measurement for the Cimarron radar is desirable, since the ground echo problem seems here potentially serious. The computer program used to process Norman pattern observation could be adapted to Cimarron with little modification.
76

ANNEX Ii
RESULTS FOR REFLECTIVITIES AND VERTICAL VELOCITIES
D.l Coplane reflectivity fields
From the digital integrator numbers for each radar (actually for Norman due to practical reasons numbers from the AGC registers were used), quantities linearly related to reflectivity logarithms were computed. This required a simple linear fitting of the logarithmic receiver integrator calibration curve and the removal of echo intensity range dependence.
For each coplane angle, Fig. Dl shows the correlation C between the two radar derived reflectivity fields as well as the mean value and standard deviation [S.D. (0)] of the AGC number difference field.
We see that:
a) For the first two elevations, C is near 0.8, and differenceoI varies widely, with a 4 dB standard deviation. This probably is due to ground targets, and partly to range ambiguous echoes recorded by the Norman radar.
b) For the next 6 angles, C is almost constant, and most of the time above 0.9; 01 very slowly decreases with its standard deviation about 2.8 dB.
c) For the rema1n1ng angles, C slowly but consistently decreases; the 0 I value is practically constant, and its standard deviation increases continuously to end near 4 dB.
No particular significance is attributed to 01 since it involves differences in radar calibrations, as well as losses (wave guides, radome) different for each radar. Interesting are the C values and field difference standard deviations.
2.] ~ 2.0
::!! 1.8
1.0 ()
~ .8 z
I!J (3 ii: I.L. .6 I!J a ()
z .4 a !i ..J .2 I!J a: a: a () 00 2
C
5.0.[81] 4 III .., 2~
o en
4 6 8 10 12 14 16 COPLANE ANGLE • OEG.
Fig. Dl. Correlation be tween' NRO 's AGC numbers, INRO, and CMF digital integrator numbers, ICMF. Mean value and standard deviation of the difference field Or in various coplanes.
It is tempting to conclude that significant figures are provided by the intermediate elevations. But, we must find an explanation for the deterioration of statistical results towards high elevations. Since there cannot be any physical cause associated to the coplane angle, we suspect the reason is altitude dependent, and therefore, this explanation might be found in XYZ coordinates.
n

D.2 Cartesian reflectivity fields
To improve results and remove one possible cause of error, the following uses a larger data field involving D.I. data for both stations. Results analog to those of the coplane analysis, i.e., correlation coefficient C, mean and standard deviation of the difference field, are shown on Fig. D2. The OZ field is significant, because every correction and calibration result has been already incorporated; we deal in principle with absolute reflectivity measurements, expressed in dBZ.
LO
(.)
I- .8 z w (.)
u: l:i .6 0 (.)
~ j:; .4 <l ~ W cr !5 .2 (.)
00
10
8
6
4
~ 2 -0
0
2
4
2 4 6 8 10km ALTITUDE
• S.D. OF 8z
MEAN • 01 FFERENCE
FIELD 8~
Fig. D2. Same as Fig. D1 in horizontal planes, except that data fields have be~n transformed into ref1ec~ivity estimates.
The relative poorness of statistics at low altitudes (clearly apparent) is found upon inspection of the data field to be due almost solely to a large area where CMF records moderate to high Z values whereas Norman received very weak signals. Since this area is located above Oklahoma City, and it is known that NRO is approximately screened from this (city region) by nearby buildings while CMF is not, ground echoes arepos~ sibly the discrepancy origin. Even with an altitude smearing of about 1.8 km because of the, analysis (two-step interpolation s_ch~me) it seems a little difficult to inte~pret ground echo influence to 4 km heights. An explanation would be the existency of large sidelobes from CMF antenna. At higher altitudes, the situation improves and again C reaches a stable level around .92. Note the mean difference is small generally less than 0.5 dB, which indic~tes that radar calibrations were correct and no systematic error in
' reflectivity measurement is likely at either radar. The difference standard deviation reaches a plateau at 3.5 dBZ rather than 2.7 dBZ in the coplane analysis. This increase is thought significant; perhaps it may be explained by the further amount of data processing involved in the coplane to' Cartesian frame transformation.
For the highest available altitudes, the statistics deteriorate similarly to what happened in the cop1ane analysis (Fig. D1). It occurred to us that, 'since data were not taken at strictly identical -times, this might be due to the echo motion, and thus the correlation coefficients were computed again after one of the f-ie1ds has been displaced by 1 or 2 grid spacings in every direction(I grid step in the horizontal In = 1.5 km). Results shown [Fig. P3 (a)] for altitudes from 5 to 10 km are enlightening; as the altitude increases, there is a consistent trend in the sense that Cimarron data maximum correlation
78

REFLECTIVITY CROSS CORRELATION x 100
Fig. D3~. Map of cross-correlation coefficients (X 100) between NRO and CMF reflectivity fields, in various horizontal planes .. The map covers a + 2 log interval along either horizontal. axis; the log value is 1.5 km.
DIFFERENCE FIELD ~TANDARD DEVIATION M"PS
Fig. D3 b. Standard deviation difference field.
tends to occur more and more shifted towards the north. Also, the difference field S.D. for maximum correlation decreases again [Fig. D3 (b)] to values near 3 dB. Note, incidently the correlation patterns are elongated generally in the SW-NE direction, i.e., the main axis of the echo line (Fig. 1).
Since the storm advection incorporated in the analysis was based on echo motion tracking at low elevation only, it is possible that the storm mean motion was actually a function of altitude, causing a partial mismatch of CMF and NRO data fields for higher elevations.
D.3 Vertical velocities
Although this work does not concern velocity per se, we present (Fig. D4) a comparison between vertical velocities derived by P. S. Ray from standard (PPP) mean Doppler velocity estimates, and those derived using processing methods described herein (M.L.). The similarity between both fields is striking; over the whole common storm volume, maximum vertical velocity difference never was found to exceed 15% (or a few m s-l for small values).
This result is pertinent to the problem of error contamination in computing vertical velocities from dual-Doppler radar data. Indeed, such computation involves numerical integration of derivatives estimated by finite
79

VERTICAL VElOCITY FIELD
H=6km 10 15 25
45
E 40 X'
35 w z ::::i 30 w rn <t 25 m
a: 20 (5 <t a:
55 :;: 0 50
~ If IlJ 45 u
0 0 z ~ 40 €) rn 0 C 35
30 0 111------ Q
P. P. P. ANALYSIS
Fig. D4. Map of vertical velocities obtained in the H = 6 km horizontal plane using estimators described in this paper (top) and the pulse pair estimator (bottom). The origin of axes is the mid<,lle of radar to radar line.
30
- ,-
differences~ and thus one thinks that small errors in the data accumulate and result in large uncertainties at high altitudes.
Results shown here involve estimates of velocity computed, which differ by a small but non-negligible quantity. According to visual inspection of samples of both data sets, this difference is approximately random, with a mean square standard deviation of the order of 1.5 m s-l Interpreted in this light, our comparison suggests that random measurement uncertainties within this order of magnitude are not able to produce major errors in the resulting vertical velocity field.
This is of particular significance in view of large vertical velocities (up to 50 m s-l) inferred from NSSL measurements in tornadic storms. Whereas such values might seem extremely high, the above comparison tends to support their validity.
80

NATIONAL SEVERE STORMS LABORATORY
The NSSL Technical Memoranda, beginning with No. 28, continue the sequence established by the U. S. Weather Bureau National Severe Storms Project, Kansas City, Mis$ouri. Numbers 1-22 were designated NSSP Reports. Numbers 23-27 were NSSL Reports, and .24-27 appeared as subseries of Weather Bureau Technical Note·s. These reports are avai.lable from the National Technical Information Service, Operations Division, Springfield, Virginia 22151, for $3.00, and a microfiche version for $0.95. NTIS numbers are given below in parentheses.
No. 1
No. 2
No. 3
No. 4
No. 5
No. 6
No. 7
No. 8
No. 9
No. 10
No. 11
No. 12
'!iIO. 13
No. 14
No. 15
No. 16
No. 17
No. 18
No. 19
No. 20
No. 21
National Severe Storms Project Objectives and Basic Design. Staff, NSSP. March 1961. (PB-168207)
The Development of Aircraf·t Investigations of Squall Lines from 1956-1960. B. B. Goddard. (PB-168208)
Instability Lines and Their Environments as Shown by Aircraft Soundings and Quasi-Horizontal Traverses. D. T. Williams. February 1962. (PB-168209)
On the Mechanics of the Tornado. J. R. Fulks. February 1962. (PB-168210)
A Summary of Field Operations and Data COl.lection by the National Severe Storms Project in Spring 1961. J. T. Lee. March 1962. (PB-165095)
Index to the NSSP Surface Network. T. Fujita. April 1962. (PB-168212)
The Vertical Structure of Three Dry Lines as Revealed by Aircraft Traverses. E. L. McGuire. April 1962. (PB-168213)
Radar Observations of a Tornado Thunderstorm in Vertical Section. Ralph J. Donaldson, Jr. April 1962. (PB-174859)
Dynamics of Severe Convective Storms. Chester W. Newton. July 1962. (PB-163319)
Some Measured Characteristics of Severe Storms Turbulence. ROy Steiner and Richard H. Rhyne. July 1962. (N62-16401)
A Study of the Kinematic Properties of Certain Smal~-Scale Systems. D. T. Williams. October 1962. (PB-168216)
Analysis of the Severe Weather-Factor in Automatic Control of Air Route Traffic. W. Boynton Beckwith. December 1962. (PB-168217)
500-Kc./Sec. Sferics Studies in Severe Storms. Douglas A. Kohl and John E. Miller. April 1963. (PB-168218)
Field Operations of the National Severe Storms Project in Spring 1962. L. D. Sanders. May 1963. (PB-168219)
Penetrations of Thunderstorms by an Aircraft Flying at Supersonic Speeds. G. P. ROYs. Radar Photographs and Gust Loads in Three Storms of 1961 Rough Rider. Paul W. J. Schumacher. May 1963. (PB-168220)
Analysis of Selected Aircraft Data from NSSP Operations, 1962. T. Fujita. May 1963. (PB-168221)
Analysis of Methods for Small-Scale Surface Network Data. D. T. Williams. August 1963. (PB-168222)
The Thunderstorm Wake of May 4, 1961. D. T. Williams. August 1963. (PB-168223)
Measurements by Aircraft of Condensed Water in Great Plains Thunderstorms. George P. Roys and Edwin Kessler. July 1966. (PB-173048)
Field Operations of the National Severe Storms Project in Spring 1963. J. T. Lee, L. D. Sander~ and D. T. Williams. January 1964. (PB-168224)
On the Motion and Predictability of Convective Systems as Related to the Upper Winds in a Case of Small Turning of Wind with Height. James C. Fankhauser. January 1964. (PB-168225)

No. 22
No. 23
No. 24
No. 25
No. 26
No. 27
No. 28
No. 29
No. 30
No. 31
No. 32
No. 33
No. 34
No. 35
No. 36
No. 37
No. 38
No. 39
No. 40
No. 41
No. 42
No. 43
No. 44
No. 45
Movement and Development Patterns of Convective storms and Forecasting the Probability of Storm Passage at a Given Location. Chester W. Newton and James C. Fankhauser. January 1964. (PB-168226)
Purposes and Programs of the National Severe Storms Laboratory, Norman, Oklahoma. Edwin Kessler. December" 1964. (PB-166675)
Papers on Weather Radar, Atmospheric Turbulence, Sferics,and Data Processing. August 1965. (AD-621586)
A Comparison of Kinematically Computed Precipitation with Observed Convective Rainfall. James C. Fankhauser. September 1965. (PB-168445)
Probing Air Motion by Doppler Analysis of Radar Clear Air Returns. Roger M. Lhermitte. May 1966. (PB-170636)
Statistical properties of Radar Echo Patterns and the Radar Echo Process. Larry Armijo. May 1966. The Role of the Kutta-Joukowski Force in Cloud Systems with Circulation. J. L. Goldman. May 1966. (PB-170756)
Movement and Predictability of Radar Echoes. James Warren Wilson. November 1966. (PB-173972)
Notes on Thunderstorm Motions, Heights, and Circulations. T. W. Harrold, W. T. Roach, and Kenneth E. Wilko November 1966. (AD-644899)
Turbulence in Clear Air Near Thunderstorms. Anne Burns, Terence W. Harrold, · Jack Burnham, and Clifford S. Spavins. December 1966. (PB-173992)
Study of a Left-Moving Thunderstorm of 23 April 1964. George R. Hammond. April 1967. (PB-17468l)
Thunderstorm Circulations and Turbulence from Aircraft and Radar Data. James C. Fankhauser and J. 'r. Lee. April 1967. (PB-174860) .
On the Continuity of Water Substance. Edwin Kessler. April 1967. (PB-175840)
Note on the Probing Balloon Motion by Doppler Radar. Roger M. Lhermitte. July 1967. (PB-175930)
A Theory for the Determination of Wind and Precipitation Velocities with Doppler Radars. Larry Armijo. August 1967. (PB-176376)
A Preliminary Evaluation of the F-IOO Rough Rider Turbulence Measurement System. U. O. Lappe. October 1967. (PB-177037)
Preliminary Quantitative Analysis of Airborne Weather Radar. Lester P. Merritt. December 1967. (PB-177l88)
On the Source of Thunderstorm Rotation. Stanley L. Barnes. March 1968. (PB-178990)
Thunderstorm - Environment Interactions Revealed by Chaff Trajectories in the Mid-Troposphere. James C. Fankhauser. June 1968. (PB-179659)
Objective Detection and Correction of Errors in Radiosonde Datc;l. Rex L. Inman. June 1968. (PB-180284)
Structure " and Movement of the Severe Thunderstorms of 3 April 1964 as Revealed from Radar and Surface Mesonetwork Data Analysis. Jess Charba and Yoshikazu Sasaki. October 1968. (PB-1833l0)
A Rainfall Rate Sensor. Brian E •. Morgan. November 1968. (PB-183979)
Detection and Presentation of Severe Thunderstorms by Airborne and GroundBased Radars: A Comparative Study. Kenneth E. Wilk, John K. Carter, and J. T. Dooley. February 1969. (PB-183572)
A Study of a Severe Local Storm of 16 April 1967. George Thomas Haglund. May 1969. (PB-184970)
On the Relationship Between Horizontal Moisture convergence and Convective Cloud Formation. Hor~ce R. Hudson. March 1970. (PB-191720)

No. 46
No. 47
No. 48
No. 49
No. 50
No. 51
No. 52
No. 53
No. 54
No. 55
No. 56
No. 57
No. 58
No. 59
No. 60
No. 61
No. 62
No. 63
No. 64
No. 65
No. 66
No. 67
No. 68
No. 69
No. 70
Severe Thunderstorm Radar Echo Motion and Related Weather Events Hazardous to Aviation Operations. Peter A. Barclay and Kenneth E. Wilko June 1970. (PB-192498)
. Evaluation of Roughness Lengths at the NSSL-WKY Meteorological Tower. Leslie D. Sanders and Allen H, Weber. August 1970. (PB-194587)
Behavior of Winds in the Lowest 1500 ft in Central Oklahoma: June 1966 -Hay 1967. Kenneth C. Crawford and Horace R. Hudson. August 1970
Tornado Incidence Maps. Arnold Court. August. 1970. (COM-71-00019)
The Meteorologically Instrumented WKY-TV Tower Facility. John K. Carter. September 1970. (COM-71-00108)
Papers on Operational Objective Analysis Schemes at the National Severe Storms Forecast Center. Rex L. Inman. November 1970. (COM-71-00136)
The Exploration of Certain Features of Tornado Dynamics Using a Laboratory Model. Neil B. Ward. November 1970. (COM-71-00139)
Rawinsonde Observation and Processing Techniques at the National Severe Storms Laboratory. Stanley L. Barnes, James H. Henderso~ and Robert J. Ketchum. April 1971. (COM-71-00707)
Model of Precipitation and Vertical Air Currents. Edwin Kessler and William C. Bumgarner. June 1971. (Cmh"'71-00911)
The NSSL Surface Network and Observations of Hazardous Wind Gusts. Operations Staff. June 1971. (COM-71-00910)
Pilot Chaff Project at the National Severe Storms Laboratory. Edward A. Jessup. November 1971. (COM-72-10106)
Numerical Simulation of Convective Vortices. Robert P. Davies-Jones and Glenn T. Vickers. November 1971. (COM~72-10269)
The Thermal Structure of the Lowest Half Kilometer in Central Oklahoma: December 9, 1966 - May 31, 1967. R. Craig Goff and Horace R. Hudson. July 1972. (COM-72-11281)
Cloud-to-Ground Lightning Versus Radar Reflectivity in Oklahoma Thunderstorms. Gilbert D. Kinzer. September 1972. (COM-73-l0050)
Simulated Real Time Displays of Velocity Fields by Doppler Radar. L. D. Hennington and G. B. Walker. November 1972. (COM-73-1051S)
Gravity Current Model Applied to Analysis of Squall-Line Gust Front. Jess Charba. November 1972. (Cm1-73-10410)
Mesoscale Objective Map Analysis Using Weighted Time-Series Observations. Stanley L. Barnes. March 1973. (COM-73-10781)
Observations of Severe Storms on 26 and 28 April 1971. Charles L. Vlcek. April 1973. (COM-73-l1200)
Meteorological Radar Signal Intensity Estimation. Dale Sirmans and R. J. Doviak. September 1973. (COM-73-11923/2AS)
Radiosonde Altitude Measurement Using Double Radiotheodolite Techniques. Stephan P. Nelson. September 1973. (COM-73-11934/9AS)
The Motion and Morphology of the Dryline. Joseph T. Schaefer. September 1973. (COM-74-10043)
Radar Rainfall Pattern Optimizing Technique. Edward A. Brandes. March 1974.
The NSSL/WKY-TV Tower Data Collection Program: April - July 1972. R. Craig Goff and W. David Zittel. May 1974.
Papers on Oklahoma Thunderstorms, April 29-30, 1970. Stanley L. Barnes, et a1. May 1974.
Life Cycle of Florida Key's Waterspouts. Joseph H. Golden. June 1974.

No. 71
No. 72
No. 73
No. 74
No. 75
Interaction of Two Convective Scales Within a Severe Thunderstorm: A Case Study and Thunderstorm Wake Vortex Structure and Aerodynamic Origin. Leslie R. Lemon. June 1974.
Updraft Properties Deduced from Rawinsoundings James H. Henderson. October 1974~
Robert P, Davies~Jones and
Severe Rainstorm at Enid. Oklahoma - October 10. 1973~ L. p. Merritt, K. E . Wi1k. and M. L. Weible. November 1974.
Mesonetwork ArraYI Its Effect on Thunderstorm Flow Resolution, Stanley L. Barnes. October 1974,
Thunderstorm .. Outf1ow Kinematics and Dynamics, R, Craig Goff, December 1975.
'* u. S. GOVERNMENT PRINTING OFFICE: 11178-877-34711278 REGION NO.8