Multiobjective Decision Making Goal
22
Decision making with mul2ple objec2ves Carles Sitompul
Transcript of Multiobjective Decision Making Goal

Decision making with mul2ple objec2ves
Carles Sitompul

• Mul2a;ribute decision making in the absence of uncertainty: goal programming
• Mul2a;ribute u2lity func2ons
• Analy2cal Hierarchy Process

• A;ributes for choosing a car: – Size of car – Fuel economy – Style of car – Price
• A;ributes for receiving job offer: – Star2ng salary – Loca2on – Degree of interest – Long term opportuni2es
• A;ributes for loca2ng new jetport: – Accessibility – Degree of noise pollu2on – Size
• A;ributes for introducing a new product: – Market share – Profit

Mul2a;ribute decision making in the absence of uncertainty: goal
programming

xi (a) be the value of the i-th attribute associated with an alternative a
v(x1, x2 ,..., xn ) be the decision maker's value function
c(x1, x2 ,..., xn ) be the decision maker's cost function
max a∈A
v x1(a), x2 (a),..., xn (a)( ) = v x1*, x2
*,..., xn*( )
min a∈A
c x1(a), x2 (a),..., xn (a)( ) = c x1*, x2
*,..., xn*( )

Defini2on
(4) Wivco Toy Corporation is introducing a new product (a globot). Wivco must deter-mine the price to charge for each globot. Two factors (market share and profits) will af-fect the pricing decision.
In these four examples, the decision maker chooses an action by determining how eachpossible action affects the relevant attributes. Such problems are called multiattribute de-cision problems.
Multiattribute Decision Making in the Absence of Uncertainty: Goal Programming
Suppose a woman believes that there are n attributes that will determine her decision. Letxi(a) be the value of the ith attribute associated with an alternative a. She associates avalue v(x1(a), x2(a), . . . , xn(a)) with the alternative a. The function v(x1, x2, . . . , xn) is thedecision maker’s value function. If A represents the decision maker’s set of possible de-cisions, then she should choose the alternative a* (with level xi* of attribute i) satisfying
maxa!A
v(x1(a), x2(a), . . . , xn(a)) ! v(x1*, x2*, . . . , xn*)
Alternatively, the decision maker can associate a cost c(x1(a), x2(a), . . . , xn(a)) with thealternative a. The function c(x1, x2, . . . , xn) is her cost function. If A represents the de-cision maker’s set of possible decisions, then she should choose the alternative a* (withlevel xi* of attribute i) satisfying
mina!A
c(x1(a), x2(a), . . . , xn(a)) ! c(x1*, x2*, . . . , xn*)
A particular form of the value or cost function is of special interest.
D E F I N I T I O N !
Under what conditions will a decision maker have an additive value (or cost) function?Before answering this question, we need some more definitions.
D E F I N I T I O N !
To illustrate the concept of preferential independence, we consider Joe’s search for ajob following graduation. In this situation, attribute 1 would be preferentially independentof attribute 2 if, for any possible job location, a higher starting salary is preferred to alower salary.
As another illustration of preferential independence, suppose that the Griswold familyis trying to determine how to spend Sunday afternoon. Let the two relevant attributes be
An attribute (call it attribute 1) is preferentially independent (pi) of anotherattribute (attribute 2) if preferences for values of attribute 1 do not depend on thevalue of attribute 2. !
A value function v(x1, x2, . . . , xn) is an additive value function if there exist nfunctions v1(x1), v2(x2), . . . , vn(xn) satisfying
v(x1, x2, . . . , xn) ! !i!n
i!1vi(xi) ! (7)
A cost function c(x1, x2, . . . , xn) is an additive cost function if there exist nfunctions c1(x1), c2(x2), . . . , cn(xn) satisfying
c(x1, x2, . . . , xn) ! !i!n
i!1ci(xi) ! (8)
774 C H A P T E R 1 3 Decision Making under Uncertainty

(4) Wivco Toy Corporation is introducing a new product (a globot). Wivco must deter-mine the price to charge for each globot. Two factors (market share and profits) will af-fect the pricing decision.
In these four examples, the decision maker chooses an action by determining how eachpossible action affects the relevant attributes. Such problems are called multiattribute de-cision problems.
Multiattribute Decision Making in the Absence of Uncertainty: Goal Programming
Suppose a woman believes that there are n attributes that will determine her decision. Letxi(a) be the value of the ith attribute associated with an alternative a. She associates avalue v(x1(a), x2(a), . . . , xn(a)) with the alternative a. The function v(x1, x2, . . . , xn) is thedecision maker’s value function. If A represents the decision maker’s set of possible de-cisions, then she should choose the alternative a* (with level xi* of attribute i) satisfying
maxa!A
v(x1(a), x2(a), . . . , xn(a)) ! v(x1*, x2*, . . . , xn*)
Alternatively, the decision maker can associate a cost c(x1(a), x2(a), . . . , xn(a)) with thealternative a. The function c(x1, x2, . . . , xn) is her cost function. If A represents the de-cision maker’s set of possible decisions, then she should choose the alternative a* (withlevel xi* of attribute i) satisfying
mina!A
c(x1(a), x2(a), . . . , xn(a)) ! c(x1*, x2*, . . . , xn*)
A particular form of the value or cost function is of special interest.
D E F I N I T I O N !
Under what conditions will a decision maker have an additive value (or cost) function?Before answering this question, we need some more definitions.
D E F I N I T I O N !
To illustrate the concept of preferential independence, we consider Joe’s search for ajob following graduation. In this situation, attribute 1 would be preferentially independentof attribute 2 if, for any possible job location, a higher starting salary is preferred to alower salary.
As another illustration of preferential independence, suppose that the Griswold familyis trying to determine how to spend Sunday afternoon. Let the two relevant attributes be
An attribute (call it attribute 1) is preferentially independent (pi) of anotherattribute (attribute 2) if preferences for values of attribute 1 do not depend on thevalue of attribute 2. !
A value function v(x1, x2, . . . , xn) is an additive value function if there exist nfunctions v1(x1), v2(x2), . . . , vn(xn) satisfying
v(x1, x2, . . . , xn) ! !i!n
i!1vi(xi) ! (7)
A cost function c(x1, x2, . . . , xn) is an additive cost function if there exist nfunctions c1(x1), c2(x2), . . . , cn(xn) satisfying
c(x1, x2, . . . , xn) ! !i!n
i!1ci(xi) ! (8)
774 C H A P T E R 1 3 Decision Making under Uncertainty
1 3 . 6 Decision Making with Multiple Objectives 775
Attribute 1 Choice of activity (either picnic or go to see movie Antarctic Vacation)Attribute 2 Sunday afternoon’s weather (either sunny or rainy)
Suppose that on a sunny day, the picnic is preferred to the movie, but on a rainy day,the movie is preferred to the picnic. Then attribute 1 is not preferentially independent ofattribute 2.
D E F I N I T I O N !
Again refer to Joe’s search for a job. Suppose Joe’s five job offers are located in LosAngeles, Chicago, Dallas, New York, and Indianapolis. If, for any given salary level, Joeprefers to work in Los Angeles, then attribute 2 is pi of attribute 1. If attribute 1 were alsopi of attribute 2, then attributes 1 and 2 would be mpi.
The concept of mutual preferential independence can be generalized to sets of attributes.
D E F I N I T I O N !
In the example of Joe’s purchase of a new car, let S ! attributes 1 and 2, and S" ! at-tributes 3 and 4. Then for S to be mpi of S", it must be the case that (1) Joe’s preferencesfor size and fuel economy are unaffected by a car’s style and price, and (2) Joe’s prefer-ences for car style and price are unaffected by the car’s size and fuel economy. Thus, if Sand S" were mpi, we could conclude that if for a given style and price level, Joe preferredA1 (a large car getting 15 mpg) to A2 (a small car getting 25 mpg), then for any style andprice level, Joe would prefer A1 to A2.
D E F I N I T I O N !
It is easy to see that if there are only two attributes (1 and 2), the attributes are mpi ifand only if attribute 1 is mpi of attribute 2.
The following result gives a condition ensuring that the decision maker will have anadditive value (or cost) function.
T H E O R E M 1
If the set of attributes 1, 2, . . . , n is mpi, the decision maker’s preferences can berepresented by an additive value (or cost) function.
This is not an obvious result. (For a proof, see Keeney and Raiffa (1976, Chapter 3).)To illustrate the result, suppose that the decision maker’s value function for two attributesis given by
v(x1, x2) ! x1 # x1x2 # x2 (9)
A decision maker with value function (2) would, for example, prefer (6, 6) to (4, 8) (be-cause v(6, 6) ! 48 and v(4, 8) ! 44). The reader should verify that for (2), attribute 1 ispi of attribute 2, and attribute 2 is pi of attribute 1 (see Problem 3 at the end of this
A set of attributes 1, 2, . . . , n is mutually preferentially independent (mpi) iffor all subsets S of {1, 2, . . . , n}, S is mpi of S!. (S! is all members of {1, 2, . . . ,n} that are not included in S.) !
A set of attributes S is mutually preferentially independent (mpi) of a set ofattributes S" if (1) the values of the attributes in S" do not affect preferences forthe values of attributes in S, and (2) the values of attributes in S do not affectpreferences for the values of attributes in S". !
If attribute 1 is pi of attribute 2, and attribute 2 is pi of attribute 1, then attribute1 is mutually preferentially independent (mpi) of attribute 2. !
1 3 . 6 Decision Making with Multiple Objectives 775
Attribute 1 Choice of activity (either picnic or go to see movie Antarctic Vacation)Attribute 2 Sunday afternoon’s weather (either sunny or rainy)
Suppose that on a sunny day, the picnic is preferred to the movie, but on a rainy day,the movie is preferred to the picnic. Then attribute 1 is not preferentially independent ofattribute 2.
D E F I N I T I O N !
Again refer to Joe’s search for a job. Suppose Joe’s five job offers are located in LosAngeles, Chicago, Dallas, New York, and Indianapolis. If, for any given salary level, Joeprefers to work in Los Angeles, then attribute 2 is pi of attribute 1. If attribute 1 were alsopi of attribute 2, then attributes 1 and 2 would be mpi.
The concept of mutual preferential independence can be generalized to sets of attributes.
D E F I N I T I O N !
In the example of Joe’s purchase of a new car, let S ! attributes 1 and 2, and S" ! at-tributes 3 and 4. Then for S to be mpi of S", it must be the case that (1) Joe’s preferencesfor size and fuel economy are unaffected by a car’s style and price, and (2) Joe’s prefer-ences for car style and price are unaffected by the car’s size and fuel economy. Thus, if Sand S" were mpi, we could conclude that if for a given style and price level, Joe preferredA1 (a large car getting 15 mpg) to A2 (a small car getting 25 mpg), then for any style andprice level, Joe would prefer A1 to A2.
D E F I N I T I O N !
It is easy to see that if there are only two attributes (1 and 2), the attributes are mpi ifand only if attribute 1 is mpi of attribute 2.
The following result gives a condition ensuring that the decision maker will have anadditive value (or cost) function.
T H E O R E M 1
If the set of attributes 1, 2, . . . , n is mpi, the decision maker’s preferences can berepresented by an additive value (or cost) function.
This is not an obvious result. (For a proof, see Keeney and Raiffa (1976, Chapter 3).)To illustrate the result, suppose that the decision maker’s value function for two attributesis given by
v(x1, x2) ! x1 # x1x2 # x2 (9)
A decision maker with value function (2) would, for example, prefer (6, 6) to (4, 8) (be-cause v(6, 6) ! 48 and v(4, 8) ! 44). The reader should verify that for (2), attribute 1 ispi of attribute 2, and attribute 2 is pi of attribute 1 (see Problem 3 at the end of this
A set of attributes 1, 2, . . . , n is mutually preferentially independent (mpi) iffor all subsets S of {1, 2, . . . , n}, S is mpi of S!. (S! is all members of {1, 2, . . . ,n} that are not included in S.) !
A set of attributes S is mutually preferentially independent (mpi) of a set ofattributes S" if (1) the values of the attributes in S" do not affect preferences forthe values of attributes in S, and (2) the values of attributes in S do not affectpreferences for the values of attributes in S". !
If attribute 1 is pi of attribute 2, and attribute 2 is pi of attribute 1, then attribute1 is mutually preferentially independent (mpi) of attribute 2. !
1 3 . 6 Decision Making with Multiple Objectives 775
Attribute 1 Choice of activity (either picnic or go to see movie Antarctic Vacation)Attribute 2 Sunday afternoon’s weather (either sunny or rainy)
Suppose that on a sunny day, the picnic is preferred to the movie, but on a rainy day,the movie is preferred to the picnic. Then attribute 1 is not preferentially independent ofattribute 2.
D E F I N I T I O N !
Again refer to Joe’s search for a job. Suppose Joe’s five job offers are located in LosAngeles, Chicago, Dallas, New York, and Indianapolis. If, for any given salary level, Joeprefers to work in Los Angeles, then attribute 2 is pi of attribute 1. If attribute 1 were alsopi of attribute 2, then attributes 1 and 2 would be mpi.
The concept of mutual preferential independence can be generalized to sets of attributes.
D E F I N I T I O N !
In the example of Joe’s purchase of a new car, let S ! attributes 1 and 2, and S" ! at-tributes 3 and 4. Then for S to be mpi of S", it must be the case that (1) Joe’s preferencesfor size and fuel economy are unaffected by a car’s style and price, and (2) Joe’s prefer-ences for car style and price are unaffected by the car’s size and fuel economy. Thus, if Sand S" were mpi, we could conclude that if for a given style and price level, Joe preferredA1 (a large car getting 15 mpg) to A2 (a small car getting 25 mpg), then for any style andprice level, Joe would prefer A1 to A2.
D E F I N I T I O N !
It is easy to see that if there are only two attributes (1 and 2), the attributes are mpi ifand only if attribute 1 is mpi of attribute 2.
The following result gives a condition ensuring that the decision maker will have anadditive value (or cost) function.
T H E O R E M 1
If the set of attributes 1, 2, . . . , n is mpi, the decision maker’s preferences can berepresented by an additive value (or cost) function.
This is not an obvious result. (For a proof, see Keeney and Raiffa (1976, Chapter 3).)To illustrate the result, suppose that the decision maker’s value function for two attributesis given by
v(x1, x2) ! x1 # x1x2 # x2 (9)
A decision maker with value function (2) would, for example, prefer (6, 6) to (4, 8) (be-cause v(6, 6) ! 48 and v(4, 8) ! 44). The reader should verify that for (2), attribute 1 ispi of attribute 2, and attribute 2 is pi of attribute 1 (see Problem 3 at the end of this
A set of attributes 1, 2, . . . , n is mutually preferentially independent (mpi) iffor all subsets S of {1, 2, . . . , n}, S is mpi of S!. (S! is all members of {1, 2, . . . ,n} that are not included in S.) !
A set of attributes S is mutually preferentially independent (mpi) of a set ofattributes S" if (1) the values of the attributes in S" do not affect preferences forthe values of attributes in S, and (2) the values of attributes in S do not affectpreferences for the values of attributes in S". !
If attribute 1 is pi of attribute 2, and attribute 2 is pi of attribute 1, then attribute1 is mutually preferentially independent (mpi) of attribute 2. !

Theorem
1 3 . 6 Decision Making with Multiple Objectives 775
Attribute 1 Choice of activity (either picnic or go to see movie Antarctic Vacation)Attribute 2 Sunday afternoon’s weather (either sunny or rainy)
Suppose that on a sunny day, the picnic is preferred to the movie, but on a rainy day,the movie is preferred to the picnic. Then attribute 1 is not preferentially independent ofattribute 2.
D E F I N I T I O N !
Again refer to Joe’s search for a job. Suppose Joe’s five job offers are located in LosAngeles, Chicago, Dallas, New York, and Indianapolis. If, for any given salary level, Joeprefers to work in Los Angeles, then attribute 2 is pi of attribute 1. If attribute 1 were alsopi of attribute 2, then attributes 1 and 2 would be mpi.
The concept of mutual preferential independence can be generalized to sets of attributes.
D E F I N I T I O N !
In the example of Joe’s purchase of a new car, let S ! attributes 1 and 2, and S" ! at-tributes 3 and 4. Then for S to be mpi of S", it must be the case that (1) Joe’s preferencesfor size and fuel economy are unaffected by a car’s style and price, and (2) Joe’s prefer-ences for car style and price are unaffected by the car’s size and fuel economy. Thus, if Sand S" were mpi, we could conclude that if for a given style and price level, Joe preferredA1 (a large car getting 15 mpg) to A2 (a small car getting 25 mpg), then for any style andprice level, Joe would prefer A1 to A2.
D E F I N I T I O N !
It is easy to see that if there are only two attributes (1 and 2), the attributes are mpi ifand only if attribute 1 is mpi of attribute 2.
The following result gives a condition ensuring that the decision maker will have anadditive value (or cost) function.
T H E O R E M 1
If the set of attributes 1, 2, . . . , n is mpi, the decision maker’s preferences can berepresented by an additive value (or cost) function.
This is not an obvious result. (For a proof, see Keeney and Raiffa (1976, Chapter 3).)To illustrate the result, suppose that the decision maker’s value function for two attributesis given by
v(x1, x2) ! x1 # x1x2 # x2 (9)
A decision maker with value function (2) would, for example, prefer (6, 6) to (4, 8) (be-cause v(6, 6) ! 48 and v(4, 8) ! 44). The reader should verify that for (2), attribute 1 ispi of attribute 2, and attribute 2 is pi of attribute 1 (see Problem 3 at the end of this
A set of attributes 1, 2, . . . , n is mutually preferentially independent (mpi) iffor all subsets S of {1, 2, . . . , n}, S is mpi of S!. (S! is all members of {1, 2, . . . ,n} that are not included in S.) !
A set of attributes S is mutually preferentially independent (mpi) of a set ofattributes S" if (1) the values of the attributes in S" do not affect preferences forthe values of attributes in S, and (2) the values of attributes in S do not affectpreferences for the values of attributes in S". !
If attribute 1 is pi of attribute 2, and attribute 2 is pi of attribute 1, then attribute1 is mutually preferentially independent (mpi) of attribute 2. !
v(x 1 , x2 ) = x1 + x1x2 + x2
v 6,6( ) = 48( ) > v 4,8( ) = 44( )
Verified that a;ributes 1 and 2 are mpi, Theorem 1 implies decision maker’s preferences can be represented by an addi2ve func2on.

Value of attribute 1'=x '1 = x1 + x2
Value of attribute 2'=x '2 = x1 − x2
v '(x '1, x '2 ) = x '1+x '1( )24
−x '2( )24
v ' x '1+ x '2( ) = v x1, x2( )

Alternative 1: x1 = 6, x2 = 6Alternative 2: x1 = 4, x2 = 8
Alternative 1: x '1 = 12, x '2 = 0Alternative 2: x '1 = 12, x '2 = −4
Value alternative 1= 12 + 122
4− 0 = 48
Value alternative 2= 12 + 122
4−−42
4= 44

• The Leon Burnit Adver2sing Agency is trying to determine a TV adver2sing schedule for Priceler Auto Company – Goal 1: Its ads should be seen by at least 40 million high-‐income men (HIM).
– Goal 2: Its ads should be seen by at least 60 million low-‐income people (LIP)
– Goal 3: Its ads should be seen by a least 35 million high-‐income women (HIW).

Each million exposures by which Priceler falls short of the HIM goal costs Priceler a$200,000 penalty because of lost sales.
Each million exposures by which Priceler falls short of the LIP goal costs Priceler a$100,000 penalty because of lost sales.
Each million exposures by which Priceler falls short of the HIW goal costs Pricelera $50,000 penalty because of lost sales.
Burnit can now formulate an LP that minimizes the cost incurred in deviating fromPriceler’s three goals. The trick is to transform each inequality constraint in (21) that rep-resents one of Priceler’s goals into an equality constraint. Because we don’t know whetherthe cost-minimizing solution will undersatisfy or oversatisfy a given goal, we need to de-fine the following variables:
si! " amount by which we numerically exceed the ith goal
si# " amount by which we are numerically under the ith goal
The si! and si
# are referred to as deviational variables. For the Priceler problem, we as-sume that each si
! and si# is measured in millions of exposures. Using the deviational vari-
ables, we can rewrite the first three constraints in (21) as
7x1 ! 3x2 ! s1# # s1
! " 40 (HIM constraint)
10x1 ! 5x2 ! s2# # s2
! " 60 (LIP constraint)
5x1 ! 4x2 ! s3# # s3
! " 35 (HIW constraint)
192 C H A P T E R 4 The Simplex Algorithm and Goal Programming
TA B L E 52Cost and Number of Viewers of Ads for Priceler
Millions of Viewers
Ad HIM LIP HIW Cost ($)
Football 7 10 5 100,000Soap opera 3 5 4 160,000
C is point (3, 5)
C
B
x2
x12 4 6 8
2
4
6
8
10
12
14
(LIP)
(HIM)
(HIW)
(Budget)
F I G U R E 14Constraints for Priceler
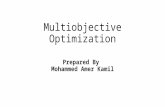
x1 = number of minutes of ads shown during football gamesx2 = number of minutes of ads shown during soap operas
tained 150,000 variables and 12,000 constraints and was solved in one hour of computertime using Karmarkar’s method. Using the simplex method, an LP with similar structurecontaining 36,000 variables and 10,000 constraints required four hours of computer time.Delta Airlines has used Karmarkar’s method to develop monthly schedules for 7,000 pi-lots and more than 400 aircraft. When the project is completed, Delta expects to havesaved millions of dollars.
4.16 Multiattribute Decision Making in the Absence of Uncertainty: Goal ProgrammingIn some situations, a decision maker may face multiple objectives, and there may be nopoint in an LP’s feasible region satisfying all objectives. In such a case, how can the de-cision maker choose a satisfactory decision? Goal programming is one technique thatcan be used in such situations. The following example illustrates the main ideas of goalprogramming.
The Leon Burnit Advertising Agency is trying to determine a TV advertising schedule forPriceler Auto Company. Priceler has three goals:
Goal 1 Its ads should be seen by at least 40 million high-income men (HIM).
Goal 2 Its ads should be seen by at least 60 million low-income people (LIP).
Goal 3 Its ads should be seen by at least 35 million high-income women (HIW).
Leon Burnit can purchase two types of ads: those shown during football games and thoseshown during soap operas. At most, $600,000 can be spent on ads. The advertising costsand potential audiences of a one-minute ad of each type are shown in Table 52. Leon Bur-nit must determine how many football ads and soap opera ads to purchase for Priceler.
Solution Let
x1 ! number of minutes of ads shown during football games
x2 ! number of minutes of ads shown during soap operas
Then any feasible solution to the following LP would meet Priceler’s goals:
min (or max) z ! 0x1 " 0x2 (or any other objective function)
s.t. 7x1 " 3x2 # 40 (HIM constraint)
s.t. 10x1 " 5x2 # 60 (LIP constraint)(21)
s.t. 5x1 " 4x2 # 35 (HIW constraint)
s.t. 100x1 " 60x2 $ 600 (Budget constraint)
x1, x2 # 0
From Figure 14, we find that no point that satisfies the budget constraint meets all threeof Priceler’s goals. Thus, (21) has no feasible solution. It is impossible to meet all ofPriceler’s goals, so Burnit might ask Priceler to identify, for each goal, a cost (per-unitshort of meeting each goal) that is incurred for failing to meet the goal. Suppose Pricelerdetermines that
4 . 1 6 Multiattribute Decision Making in the Absence of Uncertainty: Goal Programming 191
Burnit Goal ProgrammingE X A M P L E 1 0

Each million exposures by which Priceler falls short of the HIM goal costs Priceler a$200,000 penalty because of lost sales.
Each million exposures by which Priceler falls short of the LIP goal costs Priceler a$100,000 penalty because of lost sales.
Each million exposures by which Priceler falls short of the HIW goal costs Pricelera $50,000 penalty because of lost sales.
Burnit can now formulate an LP that minimizes the cost incurred in deviating fromPriceler’s three goals. The trick is to transform each inequality constraint in (21) that rep-resents one of Priceler’s goals into an equality constraint. Because we don’t know whetherthe cost-minimizing solution will undersatisfy or oversatisfy a given goal, we need to de-fine the following variables:
si! " amount by which we numerically exceed the ith goal
si# " amount by which we are numerically under the ith goal
The si! and si
# are referred to as deviational variables. For the Priceler problem, we as-sume that each si
! and si# is measured in millions of exposures. Using the deviational vari-
ables, we can rewrite the first three constraints in (21) as
7x1 ! 3x2 ! s1# # s1
! " 40 (HIM constraint)
10x1 ! 5x2 ! s2# # s2
! " 60 (LIP constraint)
5x1 ! 4x2 ! s3# # s3
! " 35 (HIW constraint)
192 C H A P T E R 4 The Simplex Algorithm and Goal Programming
TA B L E 52Cost and Number of Viewers of Ads for Priceler
Millions of Viewers
Ad HIM LIP HIW Cost ($)
Football 7 10 5 100,000Soap opera 3 5 4 160,000
C is point (3, 5)
C
B
x2
x12 4 6 8
2
4
6
8
10
12
14
(LIP)
(HIM)
(HIW)
(Budget)
F I G U R E 14Constraints for Priceler
No feasible point (area)

Costs of failing to meet goals
• Each million exposures by which Priceler falls short of the HIM goal costs Priceler a $200,000 penalty because of lost sales.
• Each million exposures by which Priceler falls short of the LIP goal costs Priceler a $100,000 penalty because of lost sales.
• Each million exposures by which Priceler falls short of the HIW goal costs Priceler a $50,000 penalty because of lost sales.

Re-‐formula2on
s1+ = amount by which we numerically exceed the i-th goals1− = amount by which we are numerically under the i-th goal
For example, suppose that x1 ! 5 and x2 ! 2. This advertising schedule yields 7(5) "3(2) ! 41 million HIM exposures. This exceeds the HIM goal by 41 # 40 ! 1 millionexposures, so s1
# ! 0 and s1" ! 1. Also, this schedule yields 10(5) " 5(2) ! 60 million
LIP exposures. This exactly meets the LIP requirement, and s2# ! s2
" ! 0. Finally, thisschedule yields 5(5) " 4(2) ! 33 million HIW exposures. We are numerically under theHIW goal by 35 # 33 ! 2 million exposures, so s3
# ! 2 and s3" ! 0.
Suppose Priceler wants to minimize the total penalty from the lost sales. In terms ofthe deviational variables, the total penalty from lost sales (in thousands of dollars) causedby deviation from the three goals is 200s1
# " 100s2# " 50s3
#. The objective function co-efficient for the variable associated with goal i is called the weight for goal i. The mostimportant goal has the largest weight, and so on. Thus, in the Priceler example, goal 1(HIM) is most important, goal 2 (LIP) is second most important, and goal 3 (HIW) isleast important.
Burnit can minimize the penalty from Priceler’s lost sales by solving the following LP:
min z ! 200s1# " 100s2
# " 50s3#
s.t. 7x1 " 3x2 " s1# # s1
" ! 40 (HIM constraint)
s.t. 10x1 " 5x2 " s2# # s2
" ! 60 (LIP constraint)(22)
s.t. 5x1 " 4x2 " s3# # s3
" ! 35 (HIW constraint)
s.t. 100x1 " 60x2 $ 600 (Budget constraint)
All variables nonnegative
The optimal solution to this LP is z ! 250, x1 ! 6, x2 ! 0, s1" ! 2, s2
" ! 0, s3" ! 0,
s1# ! 0, s2
# ! 0, s3# ! 5. This meets goal 1 and goal 2 (the goals with the highest costs,
or weights, for each unit of deviation from the goal) but fails to meet the least importantgoal (goal 3).
R E M A R K S If failure to meet goal i occurs when the attained value of an attribute is numerically smaller thanthe desired value of goal i, then a term involving si
# will appear in the objective function. If fail-ure to meet goal i occurs when the attained value of an attribute is numerically larger than the de-sired value of goal i, then a term involving si
" will appear in the objective function. Also, if we wantto meet a goal exactly and a penalty is assessed for going both over and under a goal, then termsinvolving both si
# and si" will occur in the objective function.
Suppose we modify the Priceler example by deciding that the budget restriction of $600,000 isa goal. If we decide that a $1 penalty is assessed for each dollar by which this goal is unmet, thenthe appropriate goal programming formulation would be
min z ! 200s1# " 100s2
# " 50s3# " s4
"
s.t. 7x1 " 3x2 " s1# # s1
" ! 40 (HIM constraint)s.t. 10x1 " 5x2 " s2
# # s2" ! 60 (LIP constraint)
s.t. 5x1 " 4x2 " s3# # s3
" ! 35 (HIW constraint)s.t. 100x1 " 60x2 " s4
# # s4" ! 600 (Budget constraint)
All variables nonnegative
In contrast to our previous optimal solution, the optimal solution to this LP is z ! 33%13
%, x1 ! 4%13
%, x2 ! 3%
13
%, s1" ! %
13
%, s2" ! 0, s3
" ! 0, s4" ! 33%
13
%, s1# ! 0, s2
# ! 0, s3# ! 0, s4
# ! 0. Thus, when we de-fine the budget restriction to be a goal, the optimal solution is to meet all three advertising goalsby going $33%
13
% thousand over budget.
4 . 1 6 Multiattribute Decision Making in the Absence of Uncertainty: Goal Programming 193
Optimal solution: z = 250, x1 = 6, x2 = 0,s1+ = 2, s2
+ = 0, s3+ = 0, s1
− = 0, s2− = 0, s3
− = 5.

Preemp2ve goal programming
P1 >>> P2 >>> ... >>> Pn
Preemptive Goal Programming
In our LP formulation of the Burnit example, we assumed that Priceler could exactly de-termine the relative importance of the three goals. For instance, Priceler determined that theHIM goal was !
210000
! " 2 times as important as the LIP goal, and the LIP goal was !15000
! "2 times as important as the HIW goal. In many situations, however, a decision maker maynot be able to determine precisely the relative importance of the goals. When this is thecase, preemptive goal programming may prove to be a useful tool. To apply preemptivegoal programming, the decision maker must rank his or her goals from the most impor-tant (goal 1) to least important (goal n). The objective function coefficient for the variablerepresenting goal i will be Pi. We assume that
P1 ### P2 ### P3 ### $$$ ### Pn
Thus, the weight for goal 1 is much larger than the weight for goal 2, the weight for goal 2 is much larger than the weight for goal 3, and so on. This definition of the P1, P2, . . . , Pn ensures that the decision maker first tries to satisfy the most important (goal 1) goal. Then,among all points that satisfy goal 1, the decision maker tries to come as close as possible tosatisfying goal 2, and so forth. We continue in this fashion until the only way we can comecloser to satisfying a goal is to increase the deviation from a higher-priority goal.
For the Priceler problem, the preemptive goal programming formulation is obtainedfrom (22) by replacing (22)’s objective function by P1s1
% & P2s2% & P3s3
%. Thus, the pre-emptive goal programming formulation of the Priceler problem is
min z " P1s1% & P2s2
% & P3s3%
s.t. 7x1 & 3x2 & s1% % s1
& " 40 (HIM constraint)
s.t. 10x1 & 5x2 & s2% % s2
& " 60 (LIP constraint)(23)
s.t. 5x1 & 4x2 & s3% % s3
& " 35 (HIW constraint)
s.t. 100x1 & 60x2 & s3% % s3
& ' 600 (Budget constraint)
All variables nonnegative
Assume the decision maker has n goals. To apply preemptive goal programming, we mustseparate the objective function into n components, where component i consists of the ob-jective function term involving goal i. We define
zi " objective function term involving goal i
For the Priceler example, z1 " P1s1%, z2 " P2s2
%, and z3 " P3s3%. Preemptive goal pro-
gramming problems can be solved by an extension of the simplex known as the goal pro-gramming simplex. To prepare a problem for solution by the goal programming simplex,we must compute n row 0’s, with the ith row 0 corresponding to goal i. Thus, for thePriceler problem, we have
Row 0 (goal 1): z1 % P1s1% " 0
Row 0 (goal 2): z2 % P2s2% " 0
Row 0 (goal 3): z3 % P3s3% " 0
From (23), we find that BV " {s1%, s2
%, s3%, s4} (s4 " slack variable for fourth constraint)
is a starting basic feasible solution that could be used to solve (23) via the simplex algo-rithm (or goal programming simplex algorithm). As with the regular simplex, we mustfirst eliminate all variables in the starting basis from each row 0. Adding P1 (HIM con-straint) to row 0 (goal 1) yields
Row 0 (goal 1): z1 & 7P1x1 & 3P1x2 % P1s1& " 40P1 (HIM)
194 C H A P T E R 4 The Simplex Algorithm and Goal Programming

zi = objective function term involving goal i
Preemptive Goal Programming
In our LP formulation of the Burnit example, we assumed that Priceler could exactly de-termine the relative importance of the three goals. For instance, Priceler determined that theHIM goal was !
210000
! " 2 times as important as the LIP goal, and the LIP goal was !15000
! "2 times as important as the HIW goal. In many situations, however, a decision maker maynot be able to determine precisely the relative importance of the goals. When this is thecase, preemptive goal programming may prove to be a useful tool. To apply preemptivegoal programming, the decision maker must rank his or her goals from the most impor-tant (goal 1) to least important (goal n). The objective function coefficient for the variablerepresenting goal i will be Pi. We assume that
P1 ### P2 ### P3 ### $$$ ### Pn
Thus, the weight for goal 1 is much larger than the weight for goal 2, the weight for goal 2 is much larger than the weight for goal 3, and so on. This definition of the P1, P2, . . . , Pn ensures that the decision maker first tries to satisfy the most important (goal 1) goal. Then,among all points that satisfy goal 1, the decision maker tries to come as close as possible tosatisfying goal 2, and so forth. We continue in this fashion until the only way we can comecloser to satisfying a goal is to increase the deviation from a higher-priority goal.
For the Priceler problem, the preemptive goal programming formulation is obtainedfrom (22) by replacing (22)’s objective function by P1s1
% & P2s2% & P3s3
%. Thus, the pre-emptive goal programming formulation of the Priceler problem is
min z " P1s1% & P2s2
% & P3s3%
s.t. 7x1 & 3x2 & s1% % s1
& " 40 (HIM constraint)
s.t. 10x1 & 5x2 & s2% % s2
& " 60 (LIP constraint)(23)
s.t. 5x1 & 4x2 & s3% % s3
& " 35 (HIW constraint)
s.t. 100x1 & 60x2 & s3% % s3
& ' 600 (Budget constraint)
All variables nonnegative
Assume the decision maker has n goals. To apply preemptive goal programming, we mustseparate the objective function into n components, where component i consists of the ob-jective function term involving goal i. We define
zi " objective function term involving goal i
For the Priceler example, z1 " P1s1%, z2 " P2s2
%, and z3 " P3s3%. Preemptive goal pro-
gramming problems can be solved by an extension of the simplex known as the goal pro-gramming simplex. To prepare a problem for solution by the goal programming simplex,we must compute n row 0’s, with the ith row 0 corresponding to goal i. Thus, for thePriceler problem, we have
Row 0 (goal 1): z1 % P1s1% " 0
Row 0 (goal 2): z2 % P2s2% " 0
Row 0 (goal 3): z3 % P3s3% " 0
From (23), we find that BV " {s1%, s2
%, s3%, s4} (s4 " slack variable for fourth constraint)
is a starting basic feasible solution that could be used to solve (23) via the simplex algo-rithm (or goal programming simplex algorithm). As with the regular simplex, we mustfirst eliminate all variables in the starting basis from each row 0. Adding P1 (HIM con-straint) to row 0 (goal 1) yields
Row 0 (goal 1): z1 & 7P1x1 & 3P1x2 % P1s1& " 40P1 (HIM)
194 C H A P T E R 4 The Simplex Algorithm and Goal Programming
BV = s1− , s2
− , s3− , s4{ }

Simplex Adding P1 (HIM constraint) to row 0 (goal 1) yields:
Adding P2 (LIP constraint) to row 0 (goal 2) yields:
Adding P3 (HIW constraint) to row 0 (goal 3) yields:
Row 0 (goal 1): z1 + 7P1x1 + 3P1x2 − P1s1+ = 40P1(HIM )
Row 0 (goal 2): z2 +10P2x1 + 5P2x2 − P2s2+ = 60P2 (LIP)
Row 0 (goal 3): z3 + 5P3x1 + 4P3x2 − P3s3+ = 35P3(HIW )

Differences between the goal programming and ordinary simplex
1. The ordinary simplex has a single row 0, goal programming simplex has n row 0’s
2. In goal programming simplex. Find the variable with the most posi2ve coeffiecent in row 0 (goal i’), subject to: – if a variable has a nega2ve coefficient in row 0 associated with a goal
having a higher priority than i’, then the variable cannot enter the basis.
3. When a pivot is performed, row 0 for each goal must be updated.
4. Op2mal solu2on is yielded if all goals are sa2sfied, or if each variable that can enter the basis and reduce the value of z’i will increase the devia2on from some goal i having a higher priority than i’.

the only way we can come closer to meeting goal 3 (HIW) is to violate a higher-prioritygoal, goal 2 (LIP). This is therefore an optimal tableau. The preemptive goal program-ming solution is to purchase 6 minutes of football ads and no soap opera ads. Goals 1 and2 (HIM and LIP) are met, and Priceler falls 5 million exposures short of meeting goal 3(HIW).
If the analyst has access to a computerized goal programming code, then by reorder-ing the priorities assigned to the goals, many solutions can be generated. From amongthese solutions, the decision maker can choose a solution that she feels best fits her pref-erences. Table 56 lists the solutions found by the preemptive goal programming methodfor each possible set of priorities. Thus, we see that different ordering of priorities canlead to different advertising strategies.
196 C H A P T E R 4 The Simplex Algorithm and Goal Programming
TA B L E 53Initial Tableau for Preemptive Goal Programming for Priceler
x1 x2 s1! s2
! s3! s1
" s2" s3
" s4 rhs
Row 0 (HIM) 7P1 3P1 "P1 0 0 0 0 0 0 z1 # 40P1
Row 0 (LIP) 10P2 5P2 0 "P2 0 0 0 0 0 z2 # 60P2
Row 0 (HIW) 5P3 4P3 0 0 "P3 0 0 0 0 z3 # 35P3
HIM 7 3 "1 0 0 1 0 0 0 40LIP 10 5 0 "1 0 0 1 0 0 60HIW 5 4 0 0 "1 0 0 1 0 35Budget 100 60 0 0 0 0 0 0 1 600
TA B L E 54First Tableau for Preemptive Goal Programming for Priceler
x1 x2 s1! s2
! s3! s1
" s2" s3
" s4 rhs
Row 0 (HIM) 0 0 0 0 0 "P1 0 0 0 z1 # 0
Row 0 (LIP) 0 $57P2$ $
107P2$ "P2 0 "$
107P2$ 0 0 0 z2 # $
207P2$
Row 0 (HIW) 0 $13
7P3$ $
57P3$ 0 "P3 "$
57P3$ 0 0 0 z3 # $
457P3$
HIM 1 $37
$ "$17
$ 0 0 $17
$ 0 0 0 $470$
LIP 0 $57
$ $170$ "1 0 "$
170$ 1 0 0 $
270$
HIW 0 $173$ $
57
$ 0 "1 "$57
$ 0 1 0 $475$
Budget 0 $12
70
$ $10
70
$ 0 0 "$10
70
$ 0 0 1 $20
70
$
TA B L E 55Optimal Tableau for Preemptive Goal Programming for Priceler
x1 x2 s1! s2
! s3! s1
" s2" s3
" s4 rhs
Row 0 (HIM) 0 0 0 0 0 "P1 0 0 0 z1 # 0
Row 0 (LIP) 0 "P2 0 "P2 0 0 0 0 "$1P02$ z2 # 0
Row 0 (HIW) 0 P3 0 0 "P3 0 0 0 "$2P03$ z3 # 5P3
HIM 1 $35
$ 0 0 0 0 0 0 $1
100$ 6
LIP 0 "1 0 "1 0 0 1 0 "$110$ 0
HIW 0 1 0 0 "1 0 0 1 "$210$ 5
Budget 0 $65
$ 1 0 0 "1 0 0 $1
700$ 2

the only way we can come closer to meeting goal 3 (HIW) is to violate a higher-prioritygoal, goal 2 (LIP). This is therefore an optimal tableau. The preemptive goal program-ming solution is to purchase 6 minutes of football ads and no soap opera ads. Goals 1 and2 (HIM and LIP) are met, and Priceler falls 5 million exposures short of meeting goal 3(HIW).
If the analyst has access to a computerized goal programming code, then by reorder-ing the priorities assigned to the goals, many solutions can be generated. From amongthese solutions, the decision maker can choose a solution that she feels best fits her pref-erences. Table 56 lists the solutions found by the preemptive goal programming methodfor each possible set of priorities. Thus, we see that different ordering of priorities canlead to different advertising strategies.
196 C H A P T E R 4 The Simplex Algorithm and Goal Programming
TA B L E 53Initial Tableau for Preemptive Goal Programming for Priceler
x1 x2 s1! s2
! s3! s1
" s2" s3
" s4 rhs
Row 0 (HIM) 7P1 3P1 "P1 0 0 0 0 0 0 z1 # 40P1
Row 0 (LIP) 10P2 5P2 0 "P2 0 0 0 0 0 z2 # 60P2
Row 0 (HIW) 5P3 4P3 0 0 "P3 0 0 0 0 z3 # 35P3
HIM 7 3 "1 0 0 1 0 0 0 40LIP 10 5 0 "1 0 0 1 0 0 60HIW 5 4 0 0 "1 0 0 1 0 35Budget 100 60 0 0 0 0 0 0 1 600
TA B L E 54First Tableau for Preemptive Goal Programming for Priceler
x1 x2 s1! s2
! s3! s1
" s2" s3
" s4 rhs
Row 0 (HIM) 0 0 0 0 0 "P1 0 0 0 z1 # 0
Row 0 (LIP) 0 $57P2$ $
107P2$ "P2 0 "$
107P2$ 0 0 0 z2 # $
207P2$
Row 0 (HIW) 0 $13
7P3$ $
57P3$ 0 "P3 "$
57P3$ 0 0 0 z3 # $
457P3$
HIM 1 $37
$ "$17
$ 0 0 $17
$ 0 0 0 $470$
LIP 0 $57
$ $170$ "1 0 "$
170$ 1 0 0 $
270$
HIW 0 $173$ $
57
$ 0 "1 "$57
$ 0 1 0 $475$
Budget 0 $1270
$ $1070
$ 0 0 "$1070
$ 0 0 1 $2070
$
TA B L E 55Optimal Tableau for Preemptive Goal Programming for Priceler
x1 x2 s1! s2
! s3! s1
" s2" s3
" s4 rhs
Row 0 (HIM) 0 0 0 0 0 "P1 0 0 0 z1 # 0
Row 0 (LIP) 0 "P2 0 "P2 0 0 0 0 "$1P02$ z2 # 0
Row 0 (HIW) 0 P3 0 0 "P3 0 0 0 "$2P03$ z3 # 5P3
HIM 1 $35
$ 0 0 0 0 0 0 $1100$ 6
LIP 0 "1 0 "1 0 0 1 0 "$110$ 0
HIW 0 1 0 0 "1 0 0 1 "$210$ 5
Budget 0 $65
$ 1 0 0 "1 0 0 $1700$ 2

the only way we can come closer to meeting goal 3 (HIW) is to violate a higher-prioritygoal, goal 2 (LIP). This is therefore an optimal tableau. The preemptive goal program-ming solution is to purchase 6 minutes of football ads and no soap opera ads. Goals 1 and2 (HIM and LIP) are met, and Priceler falls 5 million exposures short of meeting goal 3(HIW).
If the analyst has access to a computerized goal programming code, then by reorder-ing the priorities assigned to the goals, many solutions can be generated. From amongthese solutions, the decision maker can choose a solution that she feels best fits her pref-erences. Table 56 lists the solutions found by the preemptive goal programming methodfor each possible set of priorities. Thus, we see that different ordering of priorities canlead to different advertising strategies.
196 C H A P T E R 4 The Simplex Algorithm and Goal Programming
TA B L E 53Initial Tableau for Preemptive Goal Programming for Priceler
x1 x2 s1! s2
! s3! s1
" s2" s3
" s4 rhs
Row 0 (HIM) 7P1 3P1 "P1 0 0 0 0 0 0 z1 # 40P1
Row 0 (LIP) 10P2 5P2 0 "P2 0 0 0 0 0 z2 # 60P2
Row 0 (HIW) 5P3 4P3 0 0 "P3 0 0 0 0 z3 # 35P3
HIM 7 3 "1 0 0 1 0 0 0 40LIP 10 5 0 "1 0 0 1 0 0 60HIW 5 4 0 0 "1 0 0 1 0 35Budget 100 60 0 0 0 0 0 0 1 600
TA B L E 54First Tableau for Preemptive Goal Programming for Priceler
x1 x2 s1! s2
! s3! s1
" s2" s3
" s4 rhs
Row 0 (HIM) 0 0 0 0 0 "P1 0 0 0 z1 # 0
Row 0 (LIP) 0 $57P2$ $
107P2$ "P2 0 "$
107P2$ 0 0 0 z2 # $
207P2$
Row 0 (HIW) 0 $13
7P3$ $
57P3$ 0 "P3 "$
57P3$ 0 0 0 z3 # $
457P3$
HIM 1 $37
$ "$17
$ 0 0 $17
$ 0 0 0 $470$
LIP 0 $57
$ $170$ "1 0 "$
170$ 1 0 0 $
270$
HIW 0 $173$ $
57
$ 0 "1 "$57
$ 0 1 0 $475$
Budget 0 $12
70
$ $10
70
$ 0 0 "$10
70
$ 0 0 1 $20
70
$
TA B L E 55Optimal Tableau for Preemptive Goal Programming for Priceler
x1 x2 s1! s2
! s3! s1
" s2" s3
" s4 rhs
Row 0 (HIM) 0 0 0 0 0 "P1 0 0 0 z1 # 0
Row 0 (LIP) 0 "P2 0 "P2 0 0 0 0 "$1P02$ z2 # 0
Row 0 (HIW) 0 P3 0 0 "P3 0 0 0 "$2P03$ z3 # 5P3
HIM 1 $35
$ 0 0 0 0 0 0 $1
100$ 6
LIP 0 "1 0 "1 0 0 1 0 "$110$ 0
HIW 0 1 0 0 "1 0 0 1 "$210$ 5
Budget 0 $65
$ 1 0 0 "1 0 0 $1
700$ 2