
metoda różnic skończonych, zamiast rozk ładu na drgania...
42
równanie falowe ciąg dalszy metoda różnic skończonych, zamiast rozkładu na drgania własne (który może być wolnozbieżny) Rozwiązanie numeryczne: dzielimy strunę na N fragmentów Rozwiązanie numeryczne: dzielimy strunę na N fragmentów , dla każdego z nich rozwiązujemy równania Newtona (zabieg odwrotny do wyprowadzenia równania różniczkowego) v(x,t) - prędkość u(x t) wychylenie u(x,t) - wychylenie z równania falowego:
Transcript of metoda różnic skończonych, zamiast rozk ładu na drgania...
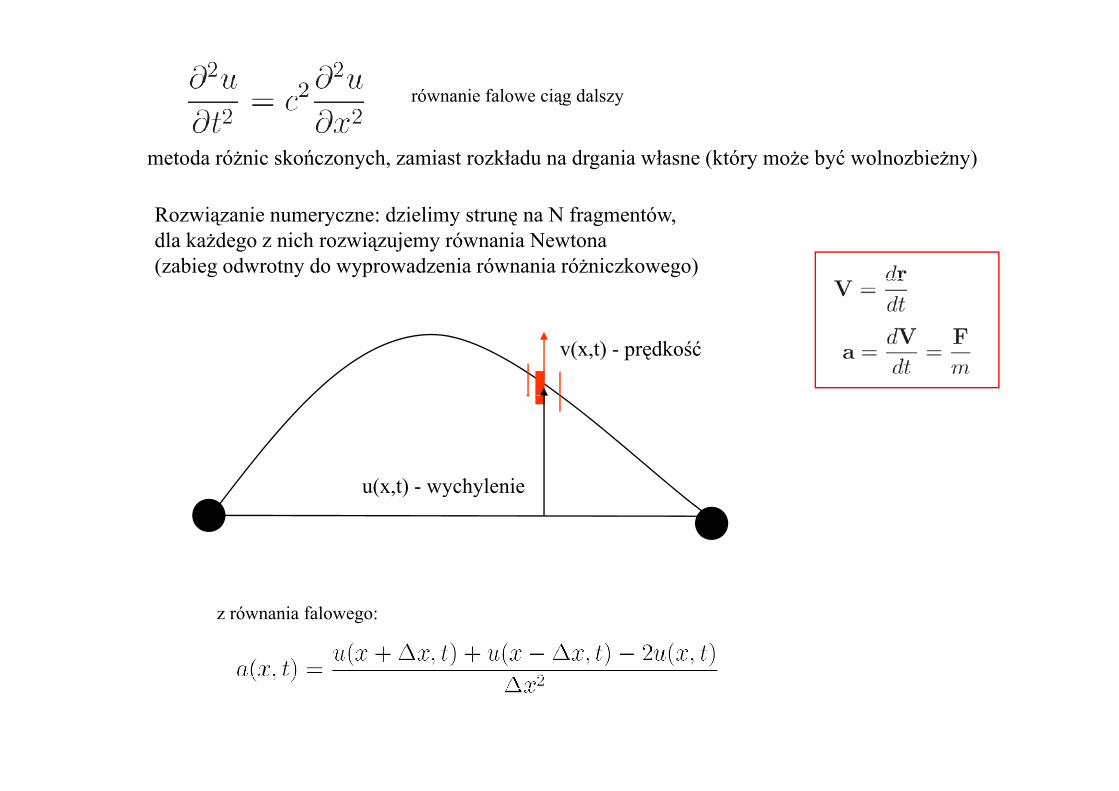
równanie falowe ciąg dalszy
metoda różnic skończonych, zamiast rozkładu na drgania własne (który może być wolnozbieżny)
Rozwiązanie numeryczne: dzielimy strunę na N fragmentówRozwiązanie numeryczne: dzielimy strunę na N fragmentów,dla każdego z nich rozwiązujemy równania Newtona(zabieg odwrotny do wyprowadzenia równania różniczkowego)
v(x,t) - prędkość
u(x t) wychylenieu(x,t) - wychylenie
z równania falowego:
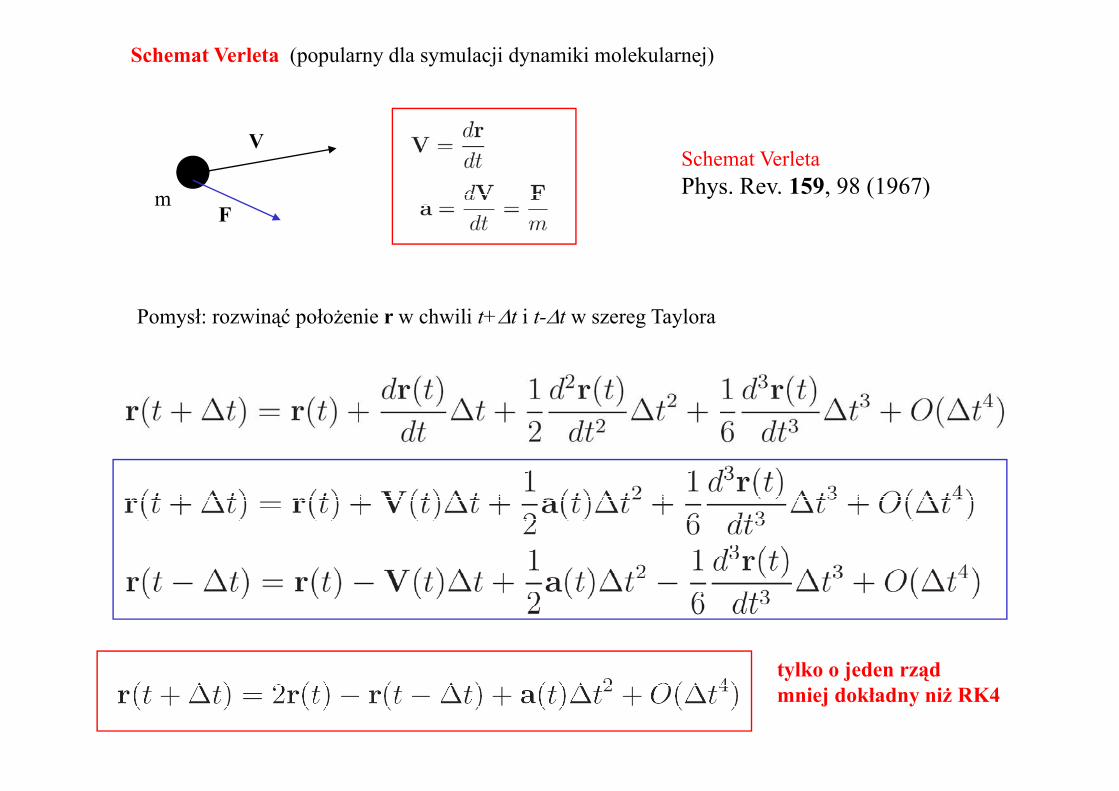
Schemat Verleta (popularny dla symulacji dynamiki molekularnej)
V
mF
Schemat VerletaPhys. Rev. 159, 98 (1967)
F
Pomysł: rozwinąć położenie r w chwili t+Δt i t-Δt w szereg Taylora
t lk j d dtylko o jeden rządmniej dokładny niż RK4
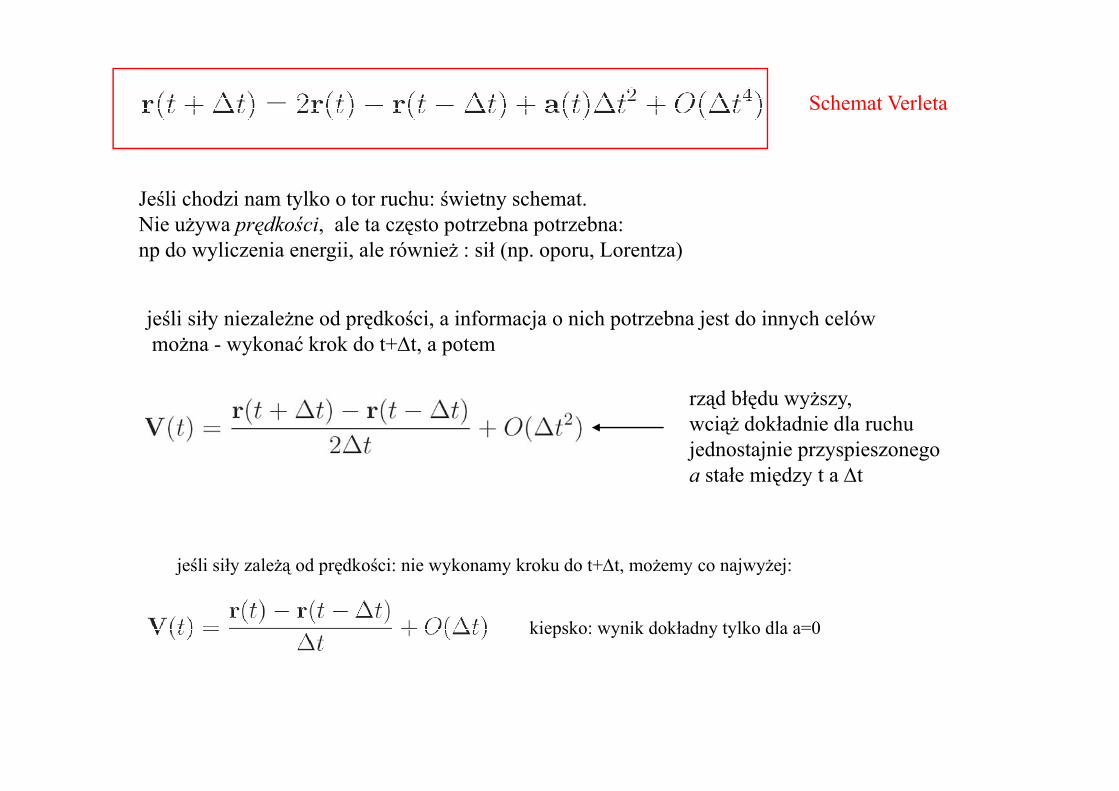
Schemat Verleta
Jeśli chodzi nam tylko o tor ruchu: świetny schemat.Nie używa prędkości, ale ta często potrzebna potrzebna: np do wyliczenia energii, ale również : sił (np. oporu, Lorentza)
jeśli siły niezależne od prędkości, a informacja o nich potrzebna jest do innych celówmożna - wykonać krok do t+Δt, a potem
rząd błędu wyższyrząd błędu wyższy, wciąż dokładnie dla ruchujednostajnie przyspieszonegoa stałe między t a Δtę y
jeśli siły zależą od prędkości: nie wykonamy kroku do t+Δt, możemy co najwyżej:
kiepsko: wynik dokładny tylko dla a=0

prędkościowa wersja schematu Verleta(dający prędkości jednocześnie z położeniami)( ją y p ę j p )
Położenia – poświęcamy jeden rząd dokładności:
Potrzebny przepis na prędkość w chwili t + Δt z błędem O(Δt2):Potrzebny przepis na prędkość w chwili t + Δt z błędem O(Δt ):
Rozwinąć r w Taylora względem punktu t+ Δt:
Dodać stronami:
(wzór potencjalnieniejawny)
Wzory podkreślone na czerwono – Verlet prędkościowy
niejawny)
Wzory podkreślone na czerwono Verlet prędkościowy.
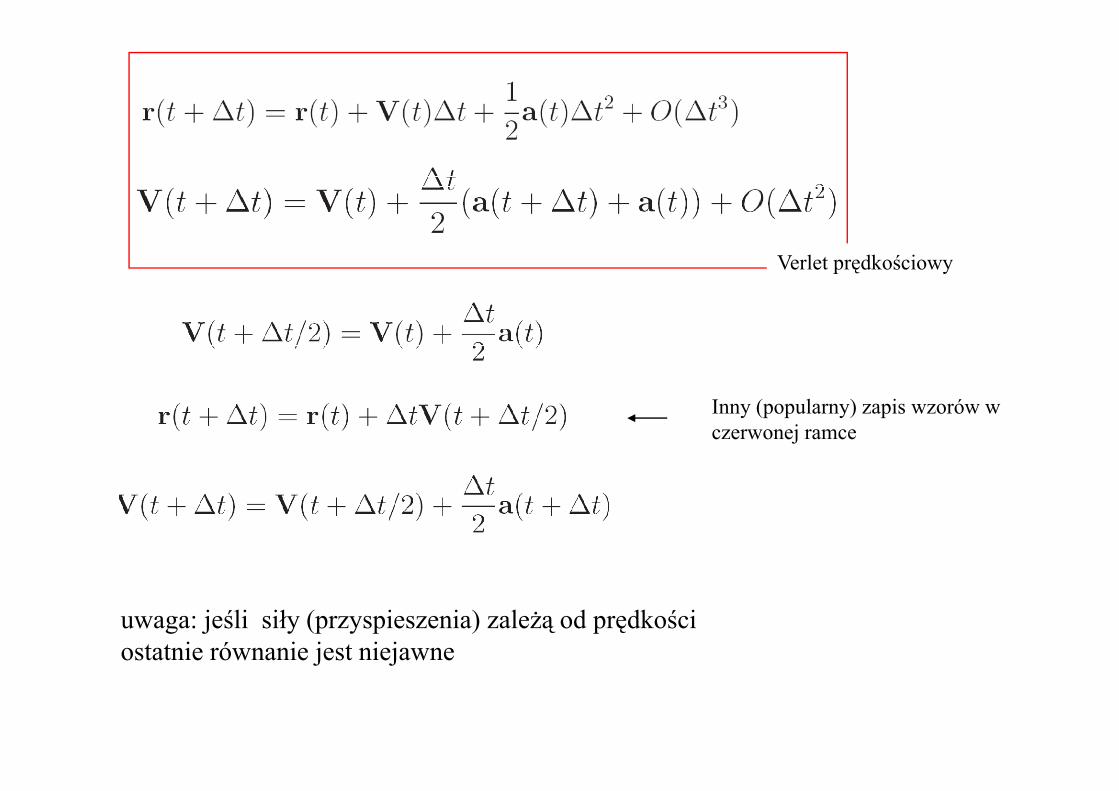
Verlet prędkościowy
Inny (popularny) zapis wzorów w czerwonej ramce
uwaga: jeśli siły (przyspieszenia) zależą od prędkości ostatnie równanie jest niejawnej j
L=1 u(x,t)
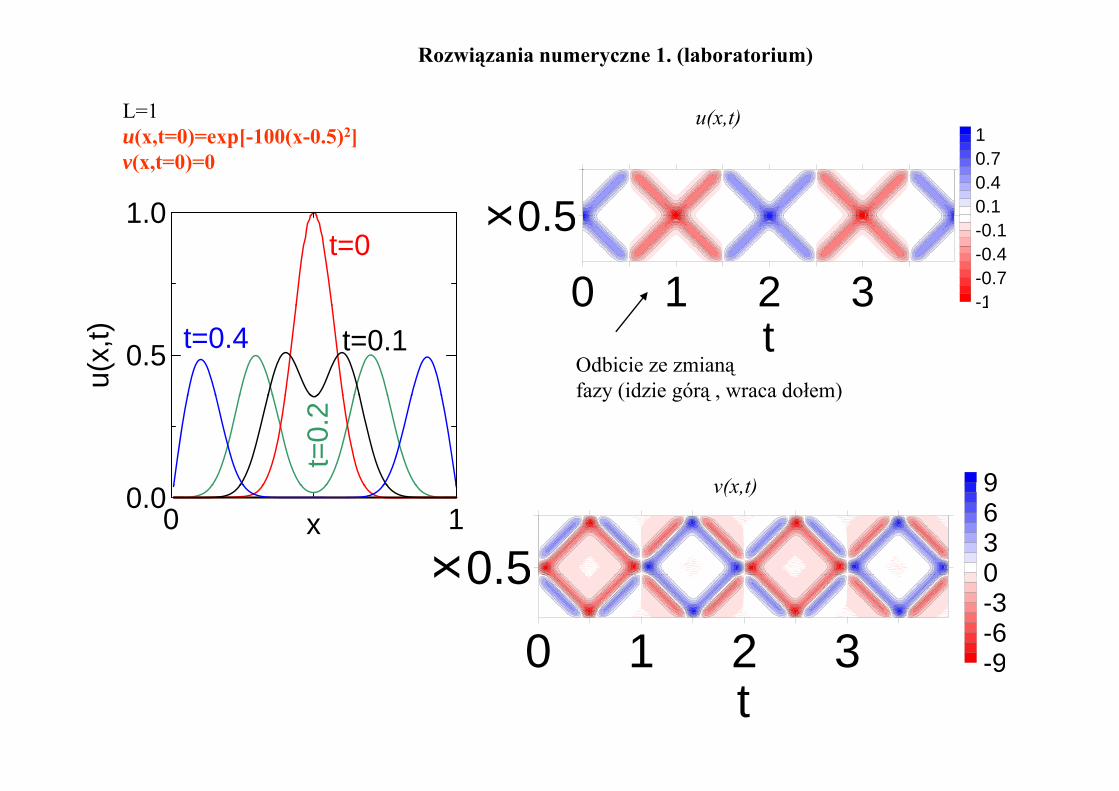
Rozwiązania numeryczne 1. (laboratorium)
u(x,t=0)=exp[-100(x-0.5)2]v(x,t=0)=0
1 0 0 5x 0.10.40.71
( , )
1.0t=0
0 1 2 3
0.5x
-1-0.7-0.4-0.1
0.5
u(x,
t) t=0.1t=0.40 1 2 3
t1
Odbicie ze zmianą fazy (idzie górą , wraca dołem)
t=0.
2
9v(x t)
fazy (idzie górą , wraca dołem)
0 1x0.0
0 5x 0369v(x,t)
0 1 2 3
0.5x
-9-6-30
0 1 2 3t
-9
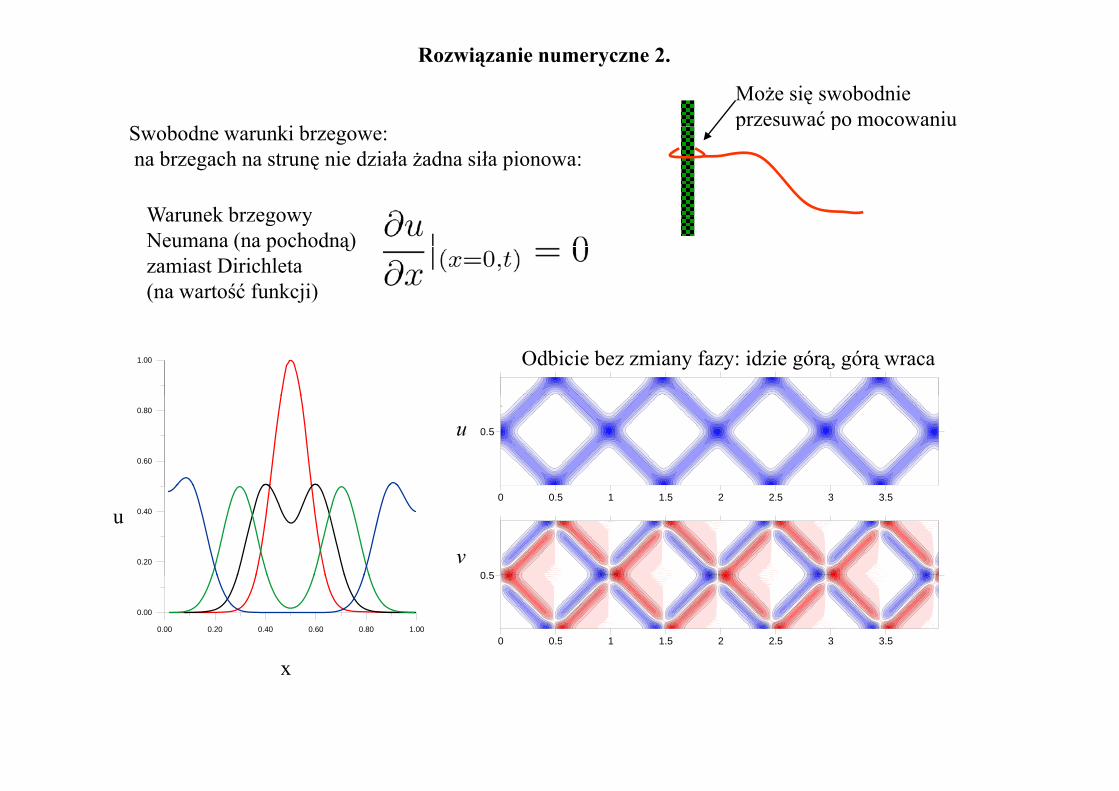
Rozwiązanie numeryczne 2.
S b d ki b
Może się swobodnieprzesuwać po mocowaniu
Swobodne warunki brzegowe:na brzegach na strunę nie działa żadna siła pionowa:
p p
Warunek brzegowyWarunek brzegowyNeumana (na pochodną)zamiast Dirichleta(na wartość funkcji)
1.00 Odbicie bez zmiany fazy: idzie górą, górą wraca
0.60
0.80
0.5u
0.20
0.40
0 0.5 1 1.5 2 2.5 3 3.5
0 5v
u
0.00 0.20 0.40 0.60 0.80 1.00
0.00
0 0.5 1 1.5 2 2.5 3 3.5
0.5
x

energia drgania:
kinetyczna Potencjalna: odkształcenie struny
Dl ( )Dla ρ(x)=ρ
Dla pojedynczego modu własnego
ω=kcT0=ρc2
Kinetyczna na potencjalną się zmienia,całkowita zachowana
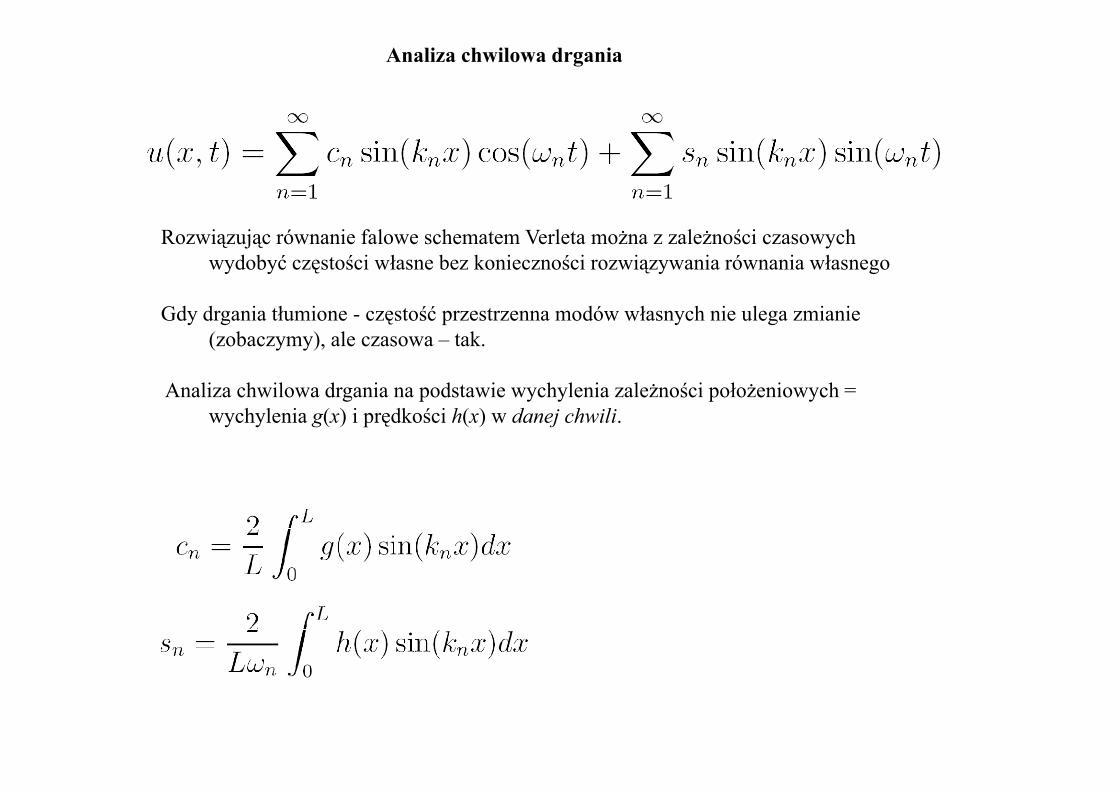
Analiza chwilowa drgania
Rozwiązując równanie falowe schematem Verleta można z zależności czasowych wydobyć częstości własne bez konieczności rozwiązywania równania własnego
d d i ł i d ł h i l i iGdy drgania tłumione - częstość przestrzenna modów własnych nie ulega zmianie (zobaczymy), ale czasowa – tak.
Analiza chwilowa drgania na podstawie wychylenia zależności położeniowych =Analiza chwilowa drgania na podstawie wychylenia zależności położeniowych wychylenia g(x) i prędkości h(x) w danej chwili.
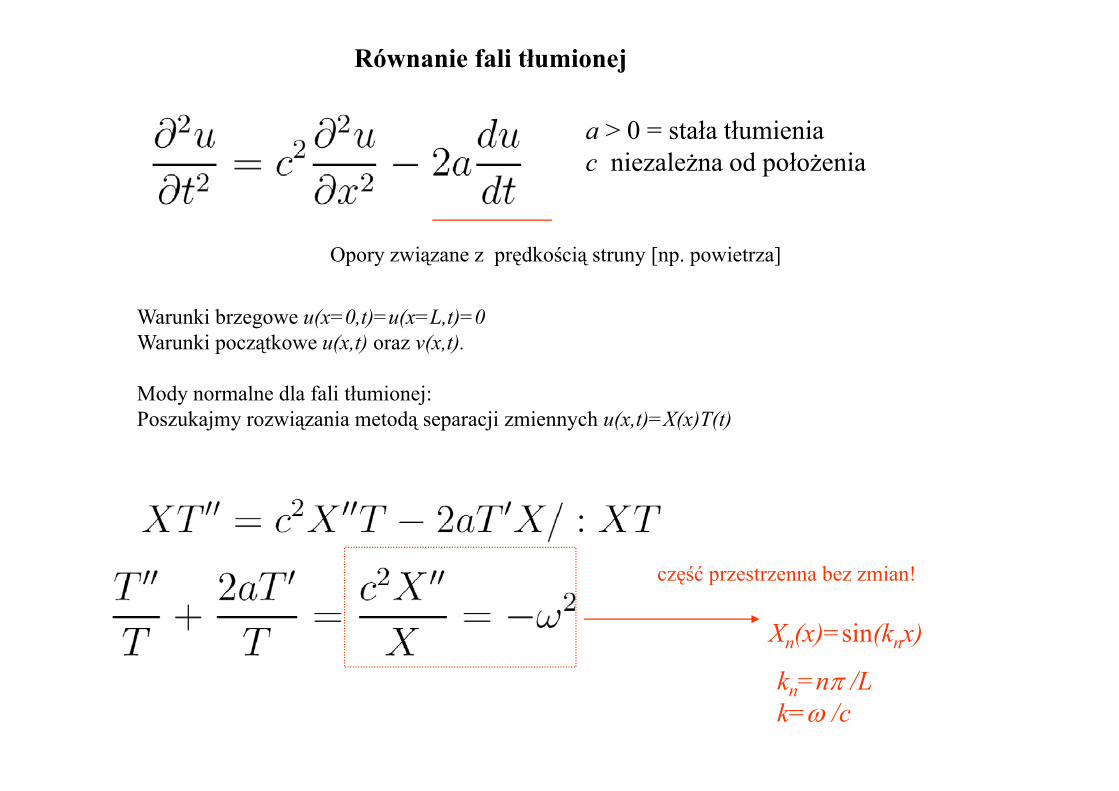
Równanie fali tłumionej
> 0 t ł tł i ia > 0 = stała tłumieniac niezależna od położenia
Opory związane z prędkością struny [np. powietrza]
Warunki brzegowe u(x=0,t)=u(x=L,t)=0Warunki początkowe u(x,t) oraz v(x,t).
Mody normalne dla fali tłumionej:Mody normalne dla fali tłumionej:Poszukajmy rozwiązania metodą separacji zmiennych u(x,t)=X(x)T(t)
część przestrzenna bez zmian!część przestrzenna bez zmian!
Xn(x)=sin(knx)
kn=nπ /Lk=ω /c
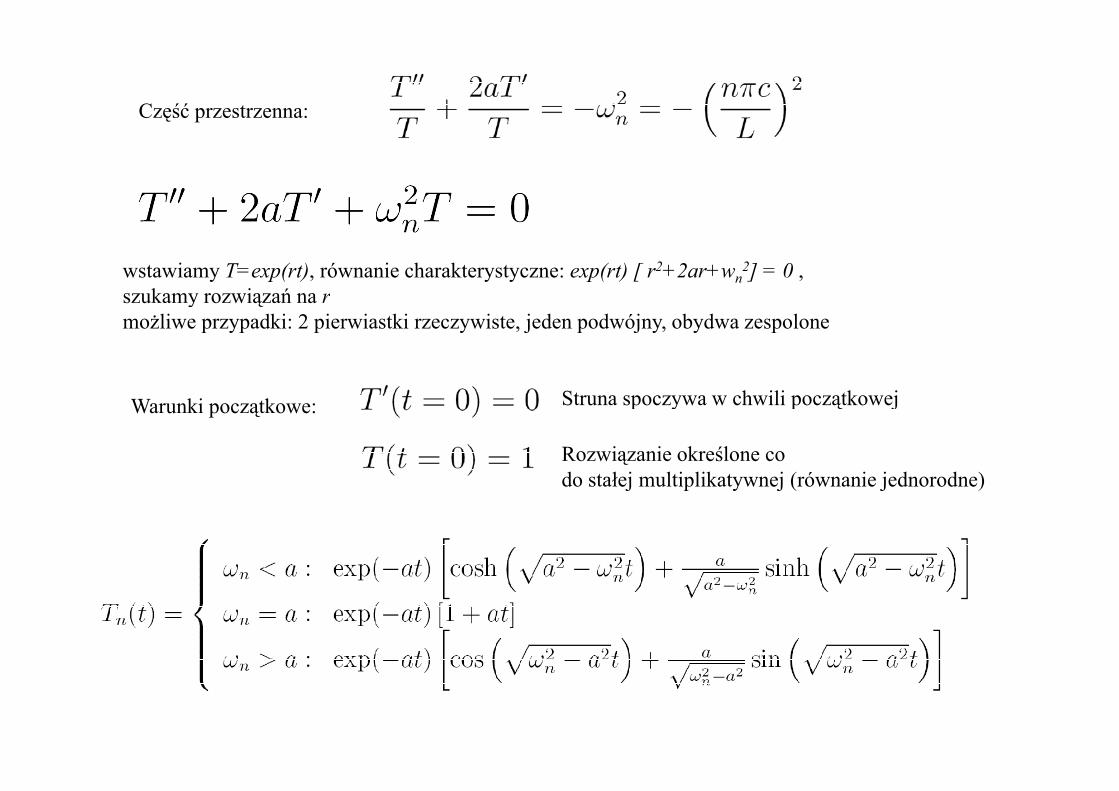
Część przestrzenna:
wstawiamy T=exp(rt), równanie charakterystyczne: exp(rt) [ r2+2ar+wn2] = 0 ,
szukamy rozwiązań na ry ąmożliwe przypadki: 2 pierwiastki rzeczywiste, jeden podwójny, obydwa zespolone
Struna spoczywa w chwili początkowejWarunki początkowe: Struna spoczywa w chwili początkowej
Rozwiązanie określone co do stałej multiplikatywnej (równanie jednorodne)do stałej multiplikatywnej (równanie jednorodne)
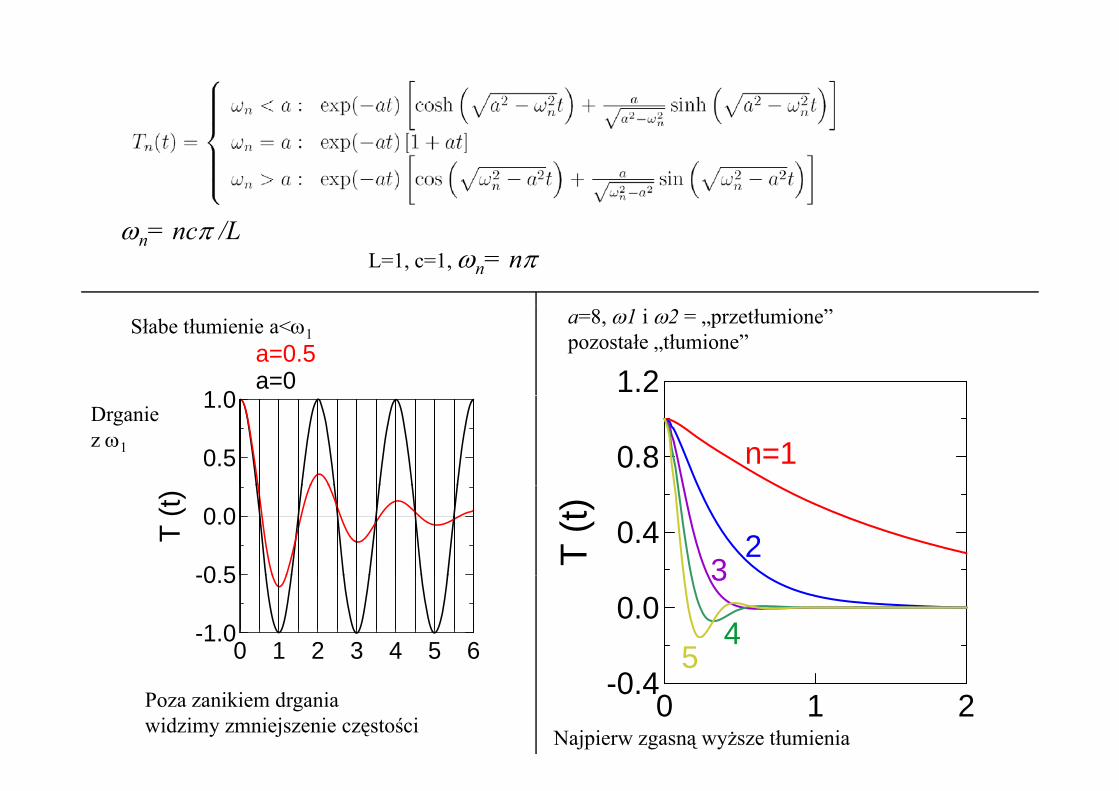
ωn= ncπ /LL=1, c=1, ωn= nπ
Słabe tłumienie a<ω1
1.2
a=8, ω1 i ω2 = „przetłumione”pozostałe „tłumione”
1 0
a=0.5a=0
Drganiez ω1 0.8 n=10.5
1.0
0.4T (t)
230 5
0.0T (t)
0.03
450 1 2 3 4 5 6
-1.0
-0.5
Poza zanikiem drganiawidzimy zmniejszenie częstości
0 1 2-0.4
5
Najpierw zgasną wyższe tłumienia
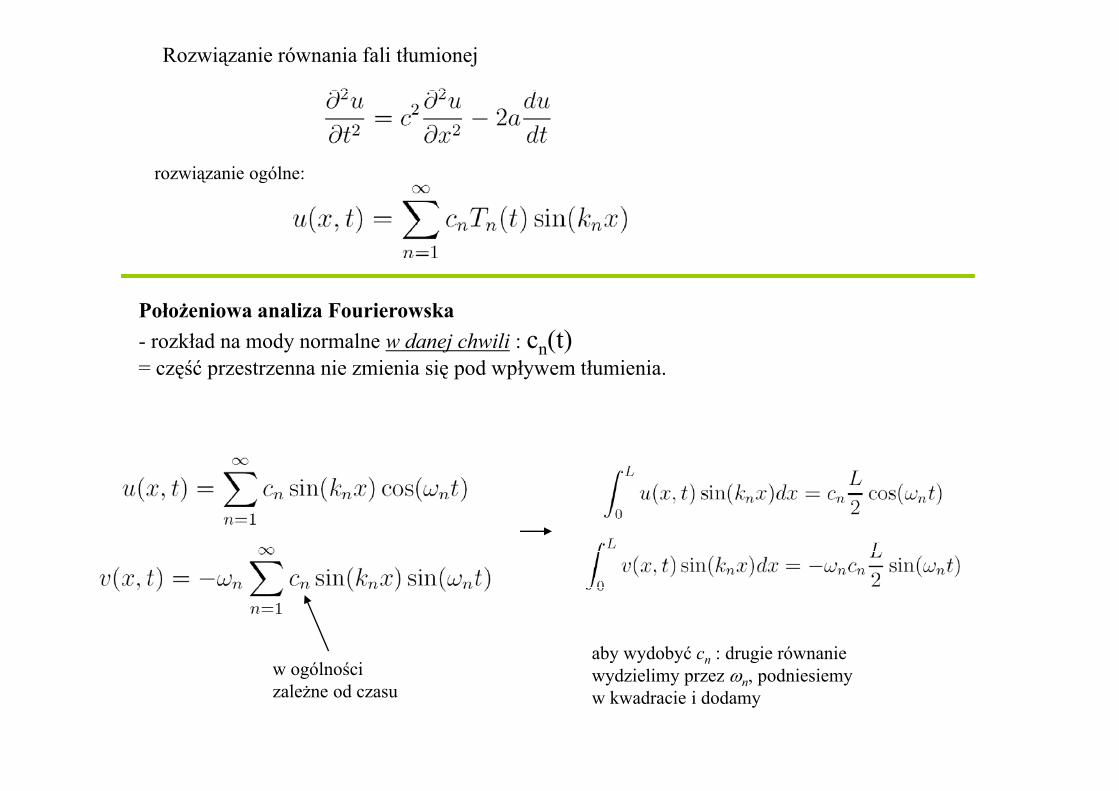
Rozwiązanie równania fali tłumionej
rozwiązanie ogólne:
P ł ż i li F i kPołożeniowa analiza Fourierowska- rozkład na mody normalne w danej chwili : cn(t)= część przestrzenna nie zmienia się pod wpływem tłumienia.
aby wydobyć cn : drugie równanieól ś i wydzielimy przez ωn, podniesiemy
w kwadracie i dodamyw ogólności zależne od czasu
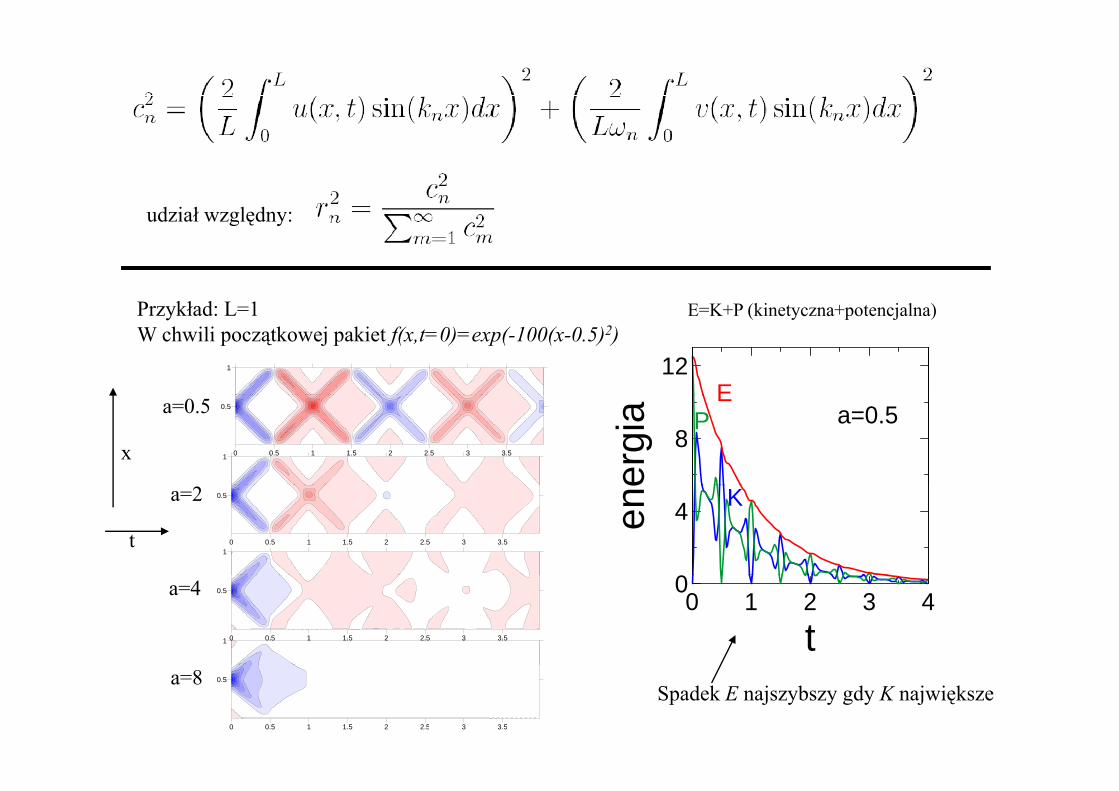
udział względny:udział względny:
P kł d L 1 E K+P (ki t + t j l )Przykład: L=1W chwili początkowej pakiet f(x,t=0)=exp(-100(x-0.5)2)
1 12E
E=K+P (kinetyczna+potencjalna)
0 0.5 1 1.5 2 2.5 3 3.5
0.5
1
a=0.58
ergi
a EP a=0.5
x
10 0.5 1 1.5 2 2.5 3 3.5
0.5a=2
0
4ene
K
t
1 0 0.5 1 1.5 2 2.5 3 3.5
0.5a=4 0 1 2 3 4t
0
0 0.5 1 1.5 2 2.5 3 3.5
0.5a=8Spadek E najszybszy gdy K największe
0 03
0.04
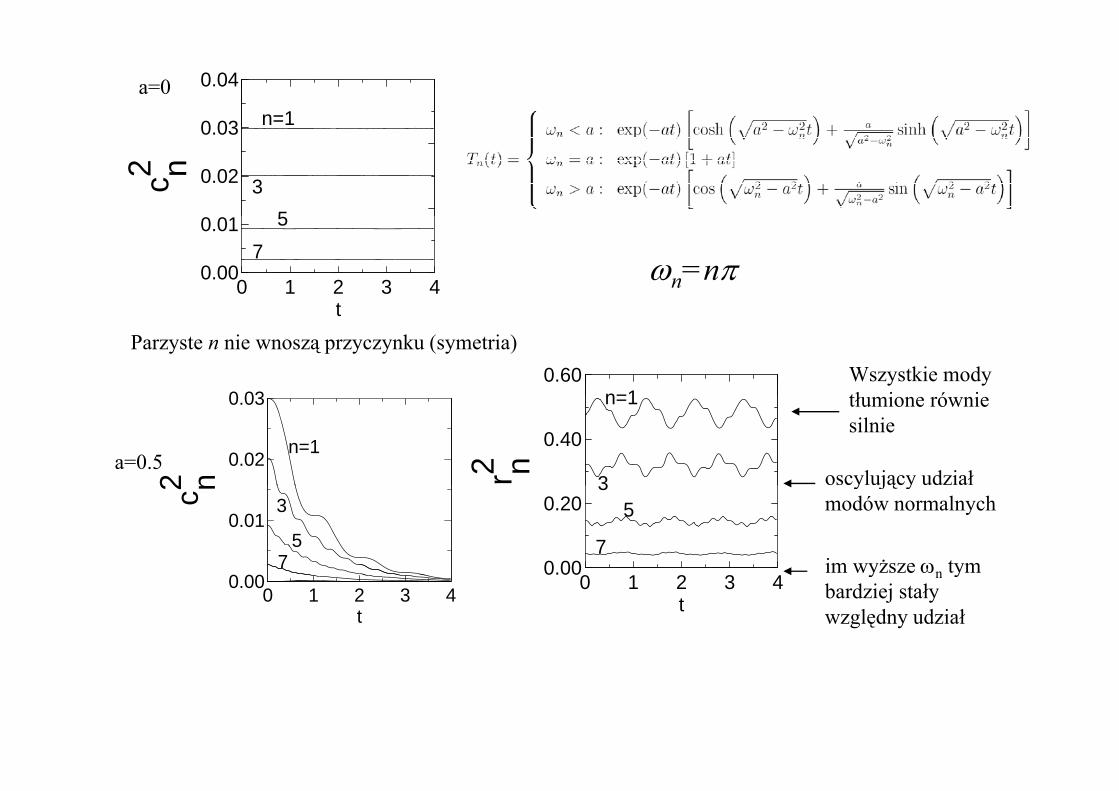
n=1a=0
0.02
0.03
c n23
5
0 1 2 3 4t
0.00
0.01 57
ωn=nπ
0 03
t
0.60n=1
Wszystkie modytł i ó i
Parzyste n nie wnoszą przyczynku (symetria)
0.02
0.03
n2
n=1a=0.5
0.40
r n2
n=1
3
tłumione równie silnie
oscylujący udział
0 00
0.01
c n2
3
57
0 1 2 3 40.00
0.203
5
7im wyższe ωn tym
y ją ymodów normalnych
0 1 2 3 4t
0.00 0 1 2 3 4t
y n ybardziej staływzględny udział

0.80n=1a=2 1.00
n=1a=3
0 40
0.60n2
n 1
0.60
0.80
n2
n=1
0.20
0.40r n2
35 0 20
0.40r n2
3
0 1 2 3 4t
0.0057
0 4 8 12 160.00
0.2057
a=4, większe tylko od ω1
tt
0 80
1.00n=1a=12
większe
0.60
0.80
r n2
większeod ω1 i ω3
0 60
0.80
1.00n=1
0.20
0.40r3
50.20
0.40
0.60
r n2
35
0 1 2 3 4t
0.00 70 1 2 3 4
t
0.0057
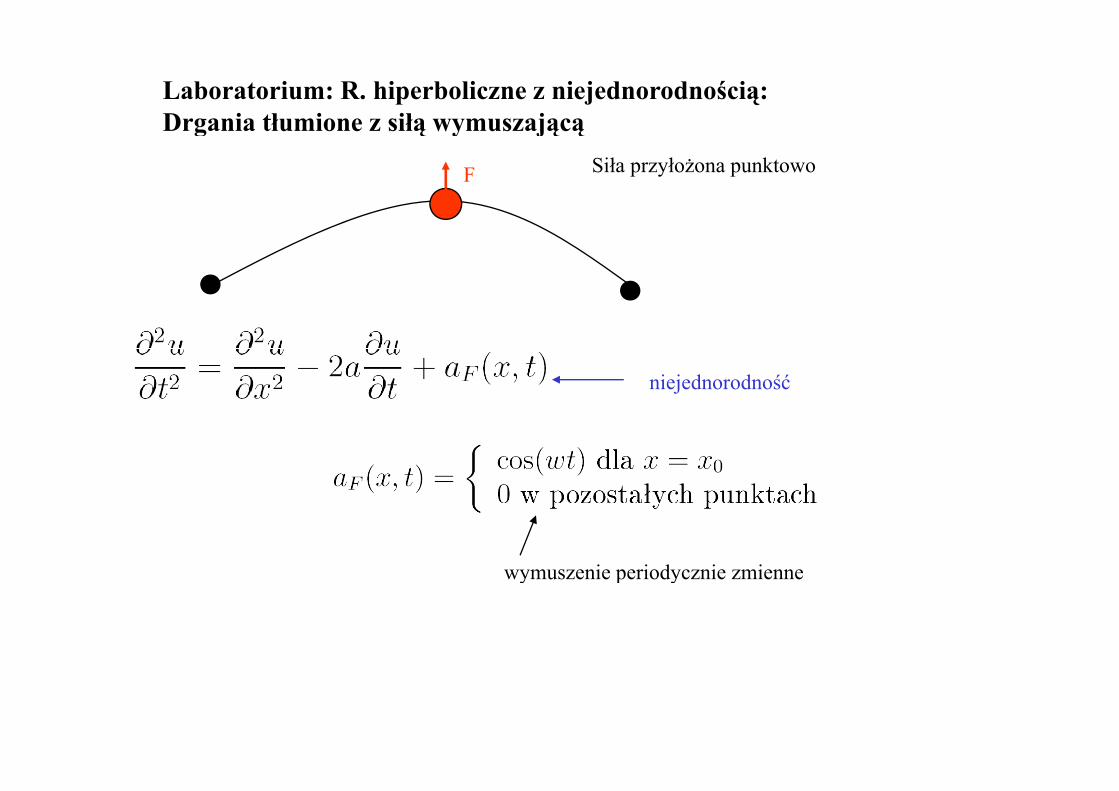
Laboratorium: R. hiperboliczne z niejednorodnością:Drgania tłumione z siłą wymuszającąDrgania tłumione z siłą wymuszającą
F Siła przyłożona punktowo
niejednorodność
wymuszenie periodycznie zmiennewymuszenie periodycznie zmienne
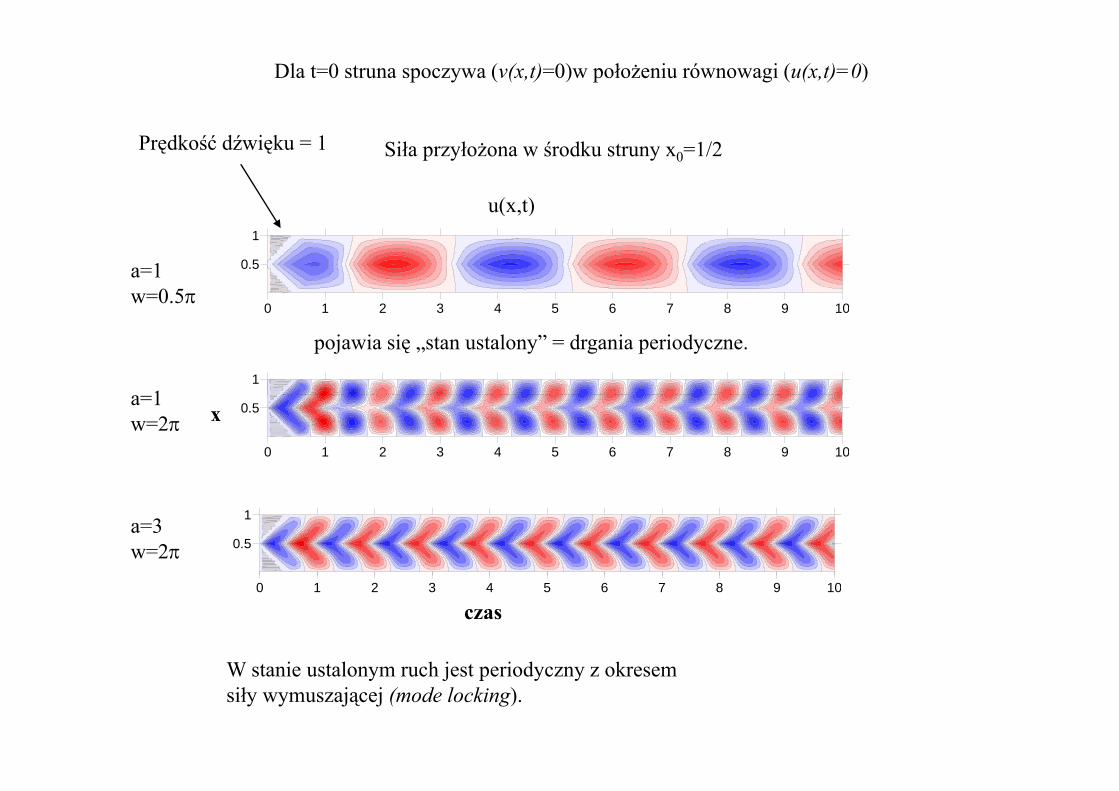
Dla t=0 struna spoczywa (v(x,t)=0)w położeniu równowagi (u(x,t)=0)
Prędkość dźwięku = 1
u(x,t)
Siła przyłożona w środku struny x0=1/2
0 1 2 3 4 5 6 7 8 9 10
0.5
1
a=1w=0.5π
( )
0 1 2 3 4 5 6 7 8 9 10
1a 1
pojawia się „stan ustalony” = drgania periodyczne.
0 1 2 3 4 5 6 7 8 9 10
0.5a=1 w=2π x
0.5
1a=3 w=2π
0 1 2 3 4 5 6 7 8 9 10
W t i t l h j t i d k
czas
W stanie ustalonym ruch jest periodyczny z okresem siły wymuszającej (mode locking).
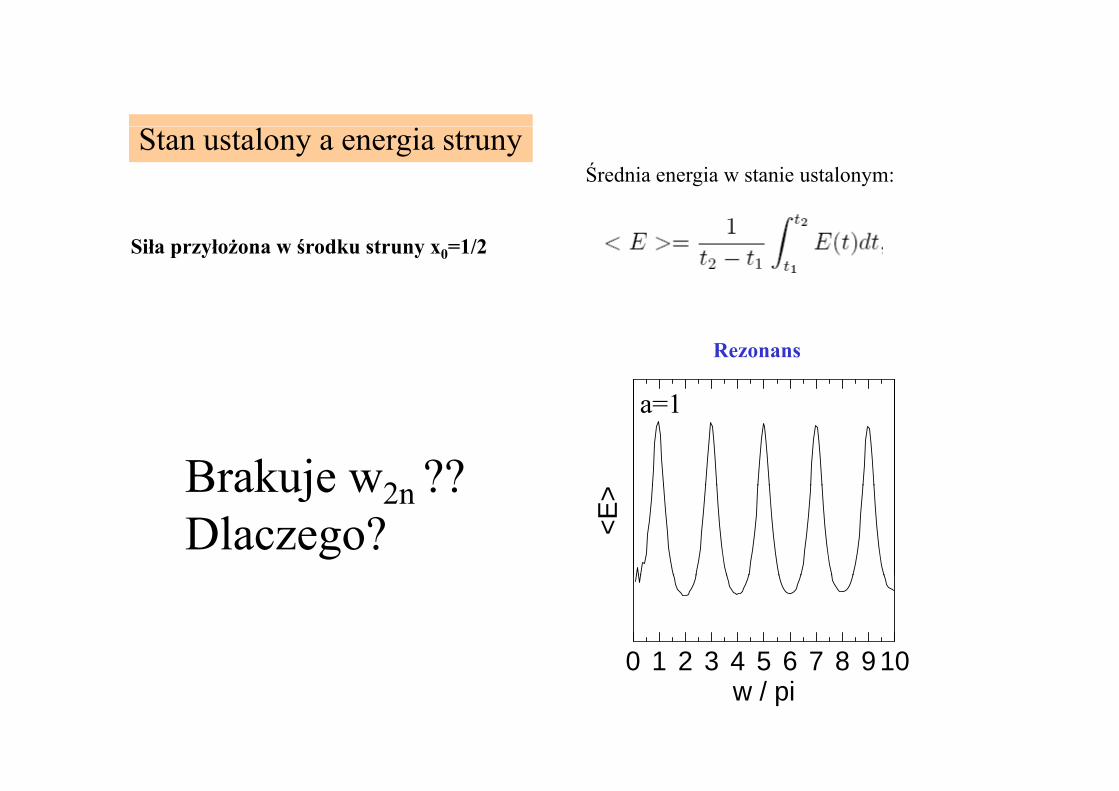
Stan ustalony a energia strunyŚrednia energia w stanie ustalonym:
Siła przyłożona w środku struny x0=1/2
1
Rezonans
a=1
Brakuje w2 ??
<E>Brakuje w2n ??
Dlaczego?
0 1 2 3 4 5 6 7 8 9 100 1 2 3 4 5 6 7 8 9 10w / pi
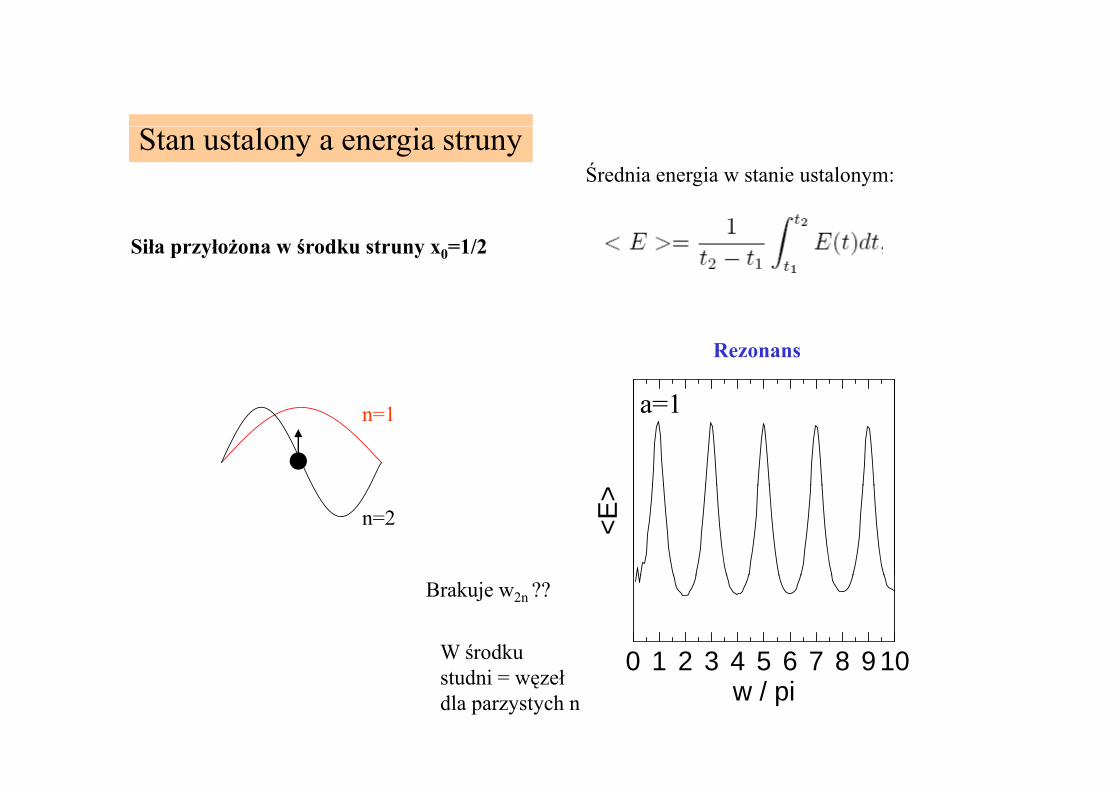
Stan ustalony a energia strunyŚrednia energia w stanie ustalonym:
Siła przyłożona w środku struny x0=1/2
1
Rezonans
a=1n=1
<E>
n=2
0 1 2 3 4 5 6 7 8 9 10
Brakuje w2n ??
W środku 0 1 2 3 4 5 6 7 8 9 10w / pistudni = węzeł
dla parzystych n
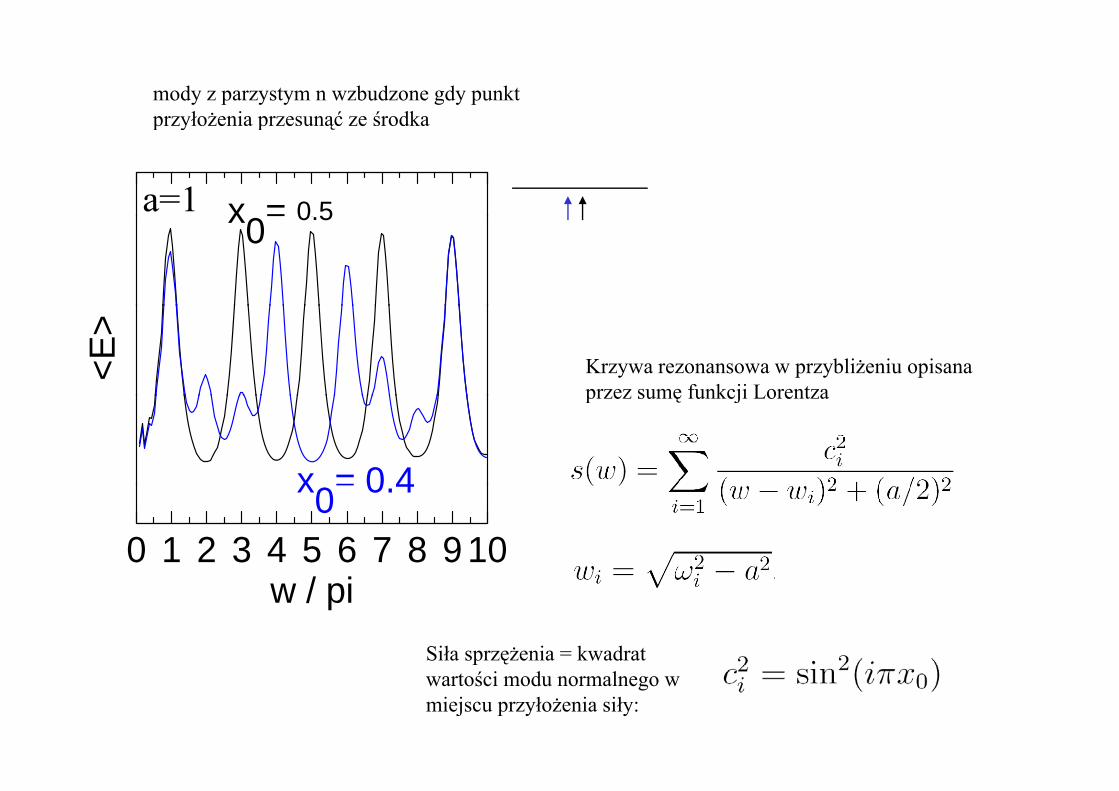
mody z parzystym n wzbudzone gdy punkt przyłożenia przesunąć ze środka
a=1 x = 00 5
p y p ą
x0 0 0.5
<E>
Krzywa rezonansowa w przybliżeniu opisanaprzez sumę funkcji Lorentza
x = 0 4
przez sumę funkcji Lorentza
0 1 2 3 4 5 6 7 8 9 10
x0 0.4
w / piSiła sprzężenia = kwadratpwartości modu normalnego w miejscu przyłożenia siły:
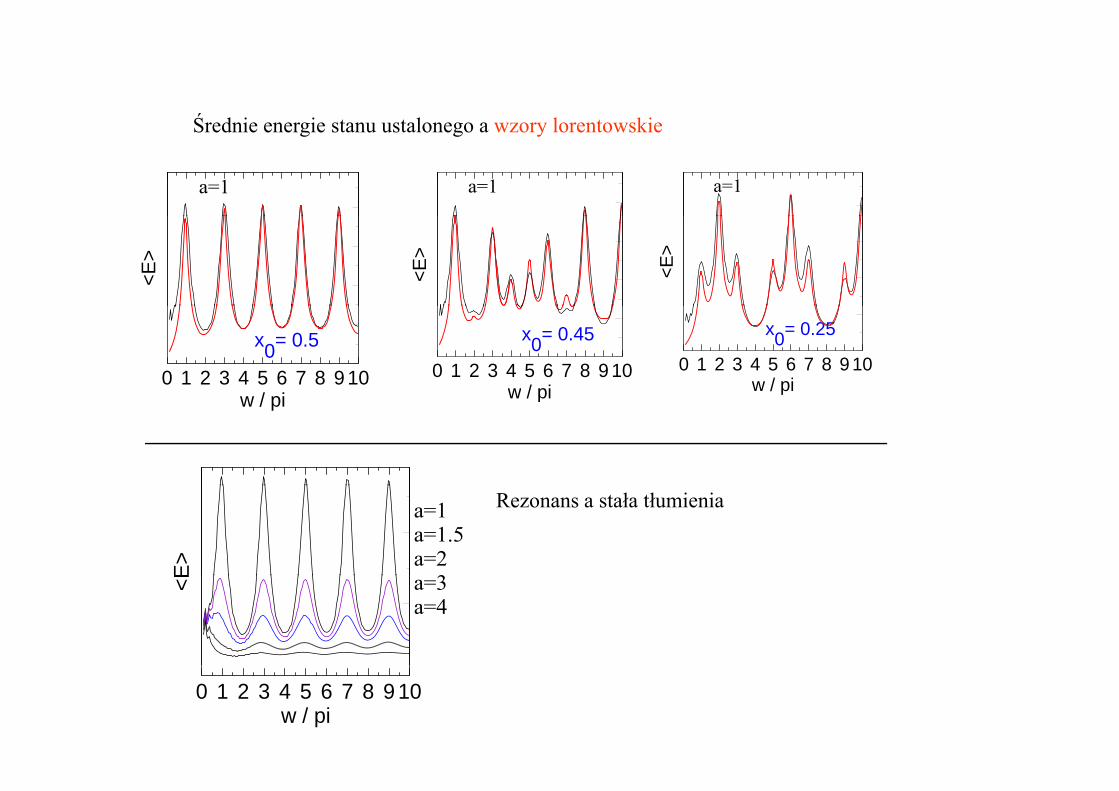
Średnie energie stanu ustalonego a wzory lorentowskie
a=1 a=1 a=1
Średnie energie stanu ustalonego a wzory lorentowskie<E
>
<E>
<E>
0 1 2 3 4 5 6 7 8 9 10/ i
x0= 0.50 1 2 3 4 5 6 7 8 9 10
w / pi
x0= 0.450 1 2 3 4 5 6 7 8 9 10
w / pi
x0= 0.25
w / pi w / pi
E>
a=1a=1.5a=2
3
Rezonans a stała tłumienia
<E a=3a=4
0 1 2 3 4 5 6 7 8 9 10w / pi
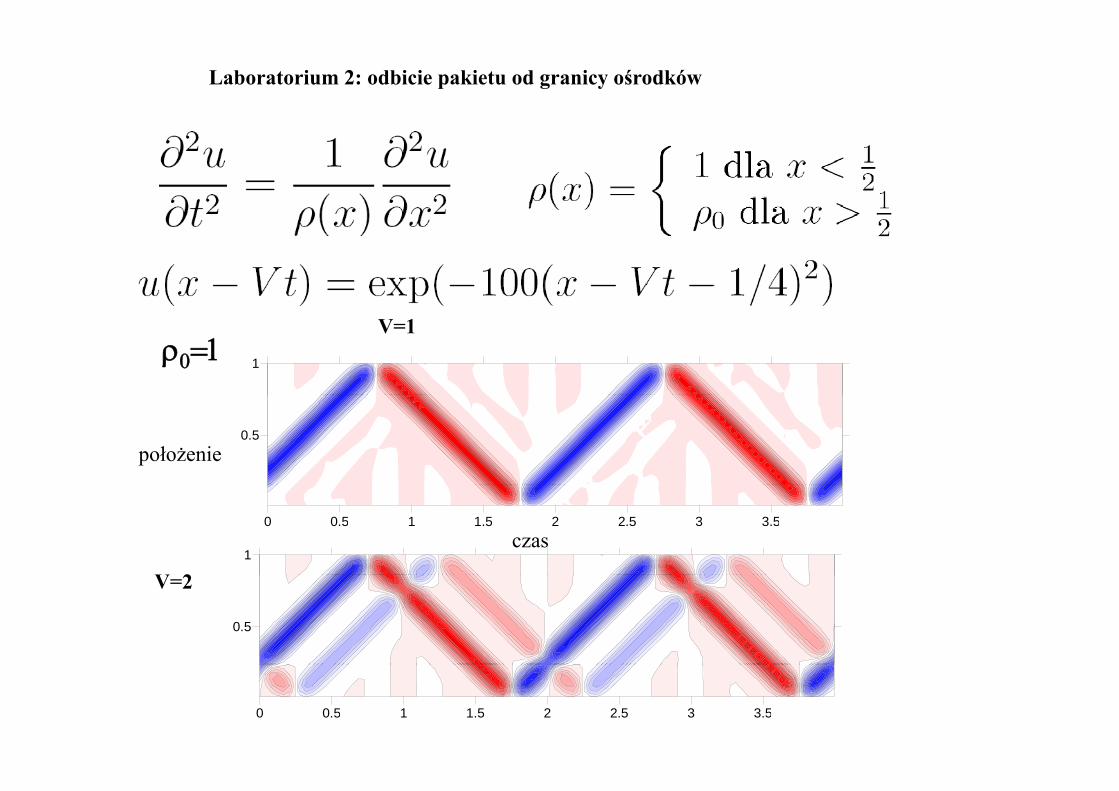
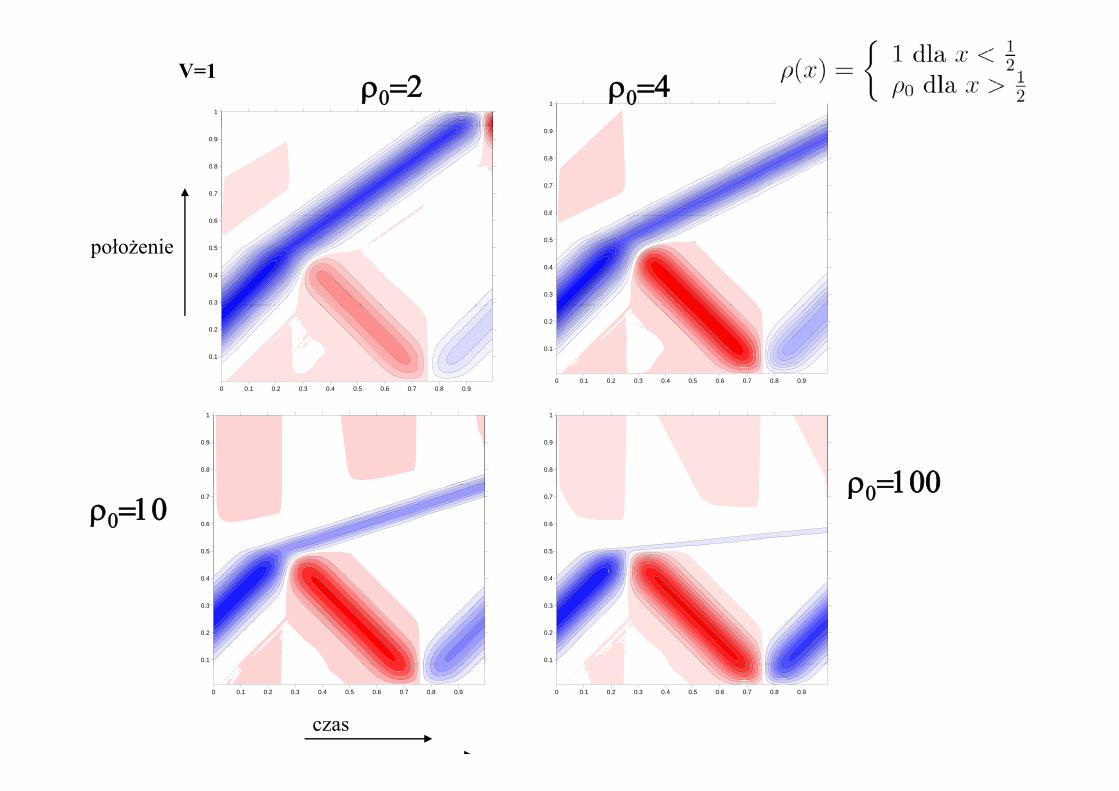
Laboratorium 2: odbicie pakietu od granicy ośrodków
1ρ0=1V=1
0.5położenie
0 0.5 1 1.5 2 2.5 3 3.5
V 2
czas1
V=2
0.5
0 0.5 1 1.5 2 2.5 3 3.5
11
ρ0=2 ρ0=4V=1
0.7
0.8
0.9
0.6
0.7
0.8
0.9
0.3
0.4
0.5
0.6
0.3
0.4
0.5położenie
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
0.1
0.2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
0.1
0.2
0.8
0.9
1
0.8
0.9
1
ρ =100
0.5
0.6
0.7
0.5
0.6
0.7
ρ0=10ρ0=100
0.1
0.2
0.3
0.4
0.1
0.2
0.3
0.4
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
czas
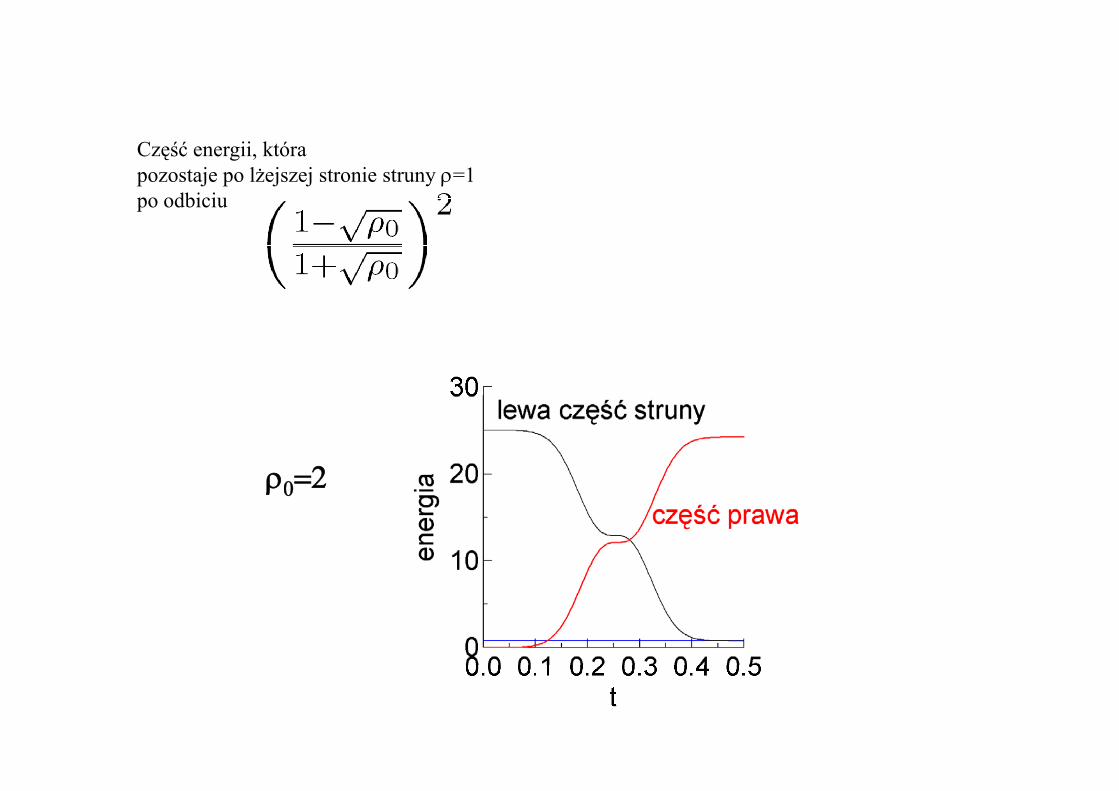
Część energii, którapozostaje po lżejszej stronie struny ρ=1 po odbiciu
ρ0=2ρ0 2
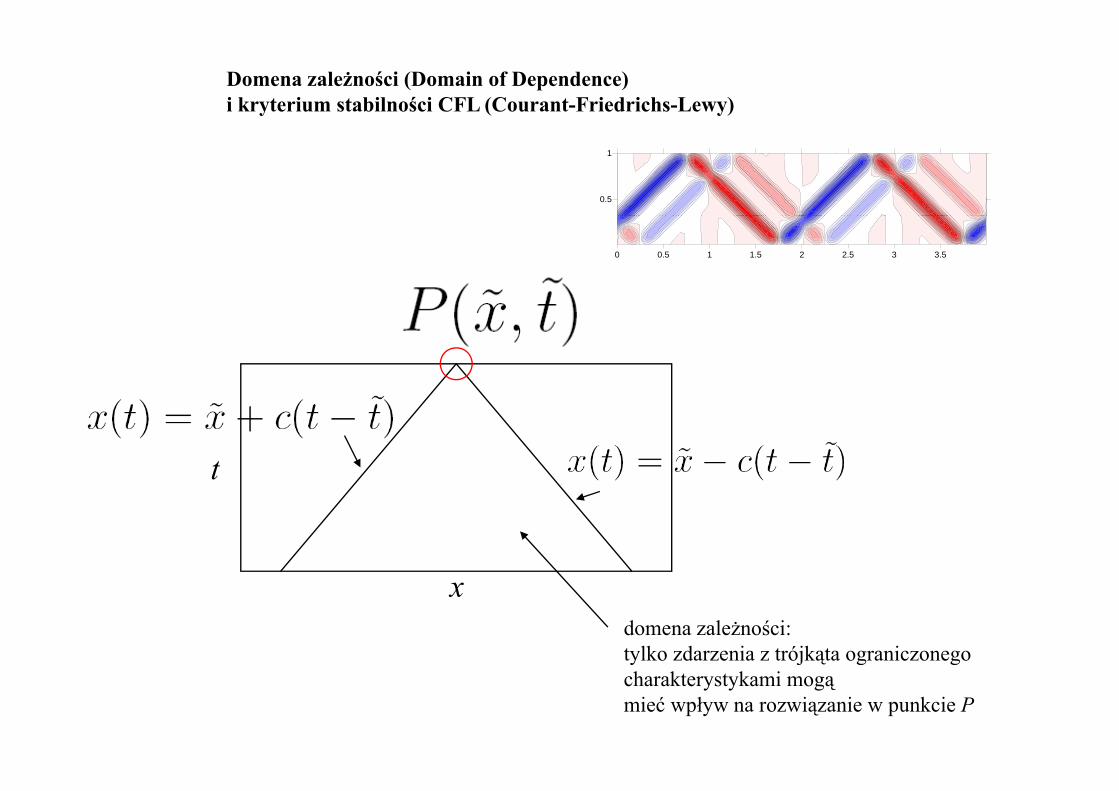
Domena zależności (Domain of Dependence) i kryterium stabilności CFL (Courant-Friedrichs-Lewy)
0.5
1
0 0.5 1 1.5 2 2.5 3 3.5
t
xdomena zależności: tylko zdarzenia z trójkąta ograniczonegoy j g gcharakterystykami mogąmieć wpływ na rozwiązanie w punkcie P
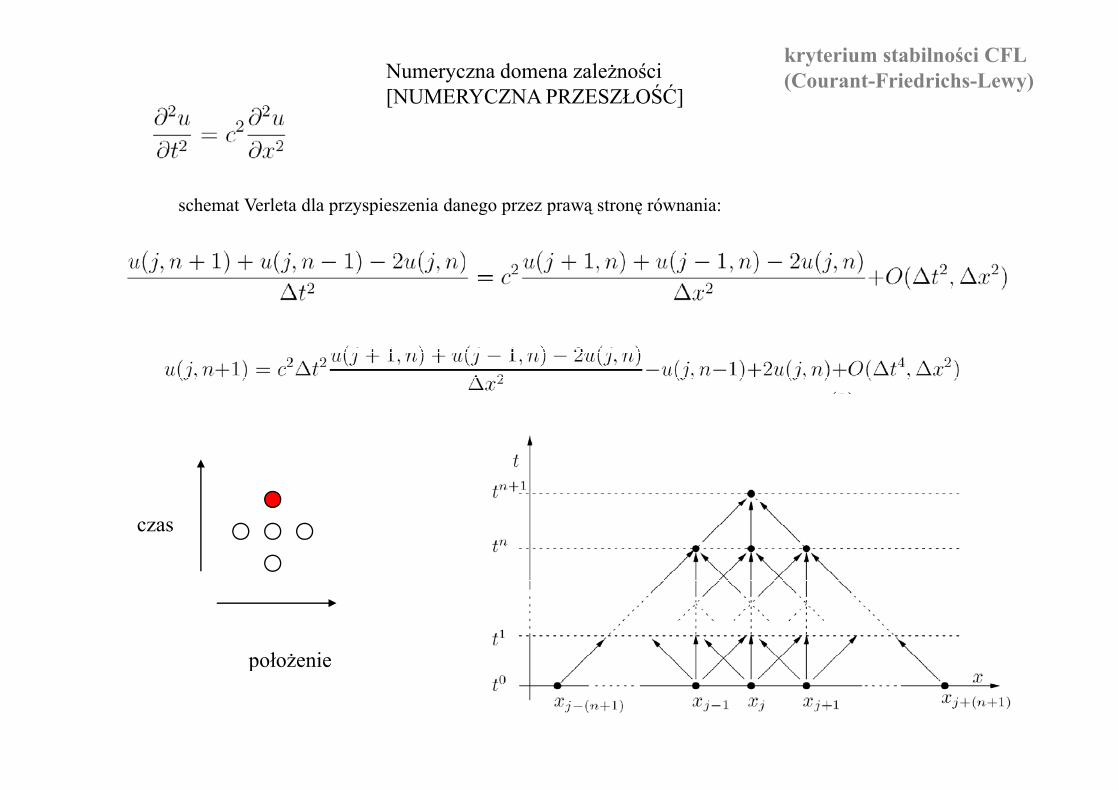
kryterium stabilności CFL(Courant-Friedrichs-Lewy)Numeryczna domena zależności
[NUMERYCZNA PRZESZŁOŚĆ]
schemat Verleta dla przyspieszenia danego przez prawą stronę równania:
czas
położeniepołożenie
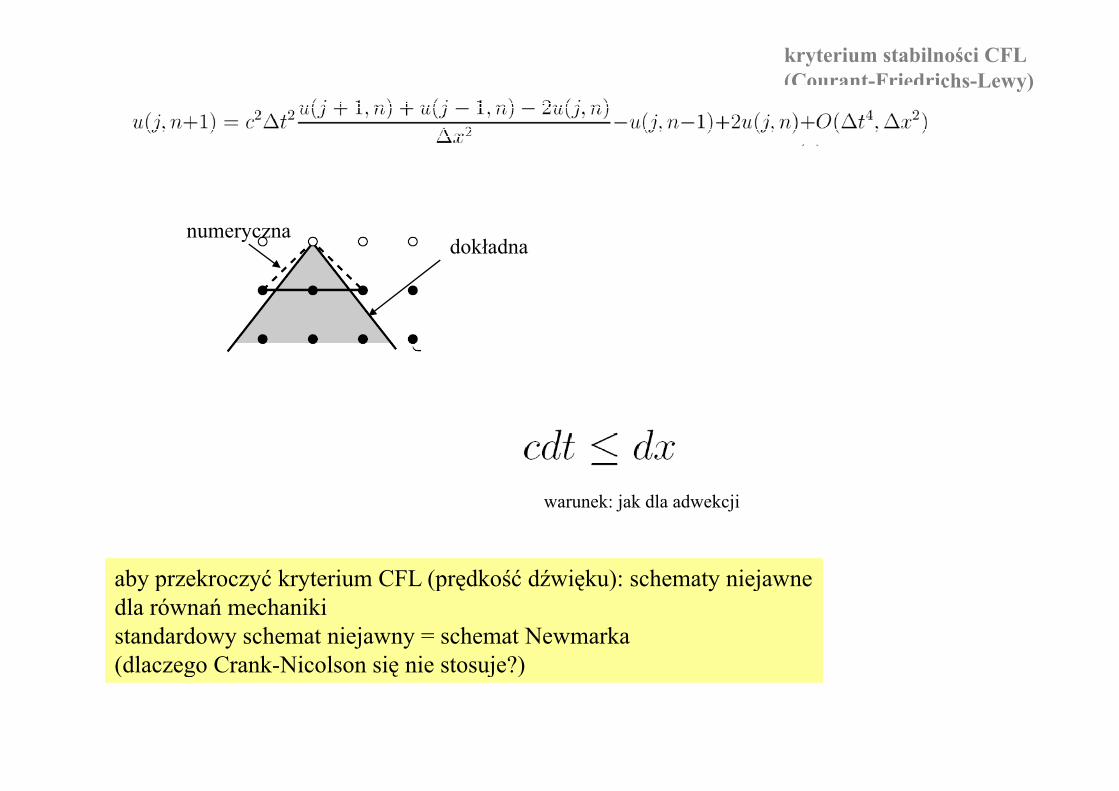
kryterium stabilności CFL(Courant-Friedrichs-Lewy)
numerycznadokładna
warunek: jak dla adwekcji
ab pr ekroc ć kr teri m CFL (prędkość dź ięk ): schemat nieja neaby przekroczyć kryterium CFL (prędkość dźwięku): schematy niejawnedla równań mechaniki standardowy schemat niejawny = schemat Newmarka (dlaczego Crank Nicolson się nie stosuje?)(dlaczego Crank-Nicolson się nie stosuje?)
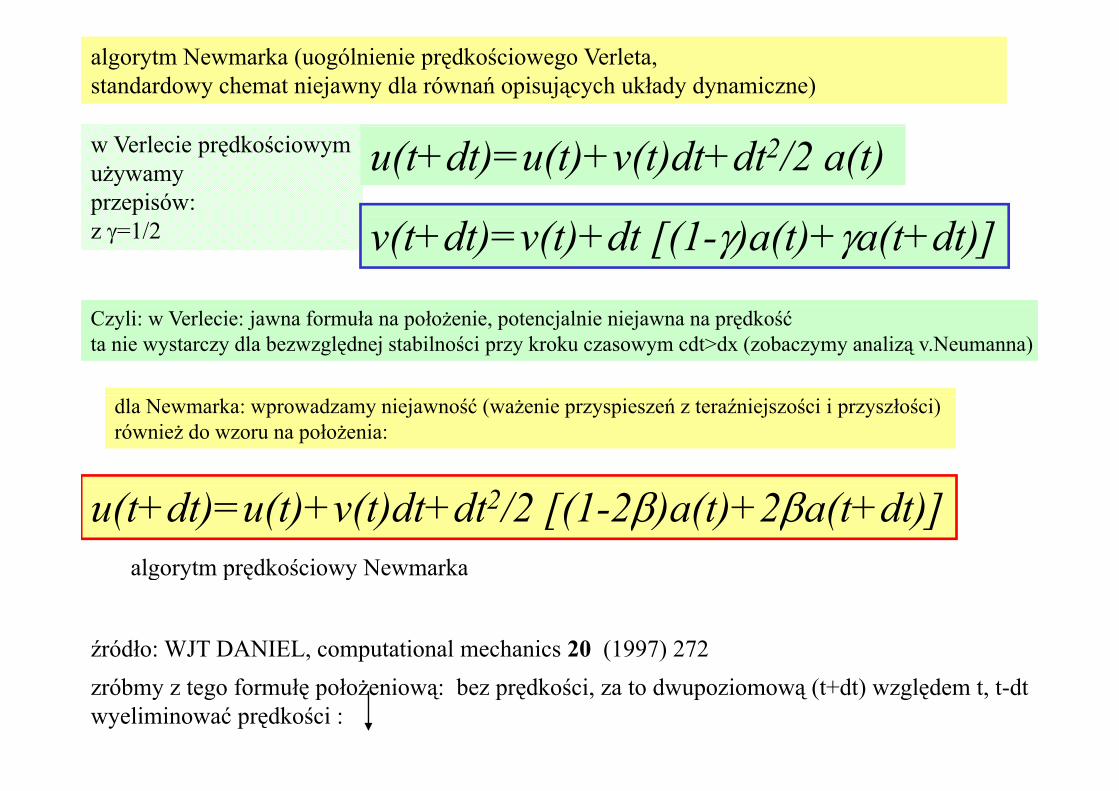
algorytm Newmarka (uogólnienie prędkościowego Verleta, standardowy chemat niejawny dla równań opisujących układy dynamiczne)
u(t+dt)=u(t)+v(t)dt+dt2/2 a(t) w Verlecie prędkościowymużywamy przepisów: z γ=1/2 v(t+dt)=v(t)+dt [(1-γ)a(t)+γa(t+dt)]
Czyli: w Verlecie: jawna formuła na położenie, potencjalnie niejawna na prędkośćta nie wystarczy dla bezwzględnej stabilności przy kroku czasowym cdt>dx (zobaczymy analizą v.Neumanna)
dla Newmarka: wprowadzamy niejawność (ważenie przyspieszeń z teraźniejszości i przyszłości) również do wzoru na położenia:
u(t+dt)=u(t)+v(t)dt+dt2/2 [(1-2β)a(t)+2βa(t+dt)]algorytm prędkościowy Newmarka
źródło: WJT DANIEL, computational mechanics 20 (1997) 272
algorytm prędkościowy Newmarka
zróbmy z tego formułę położeniową: bez prędkości, za to dwupoziomową (t+dt) względem t, t-dtwyeliminować prędkości :
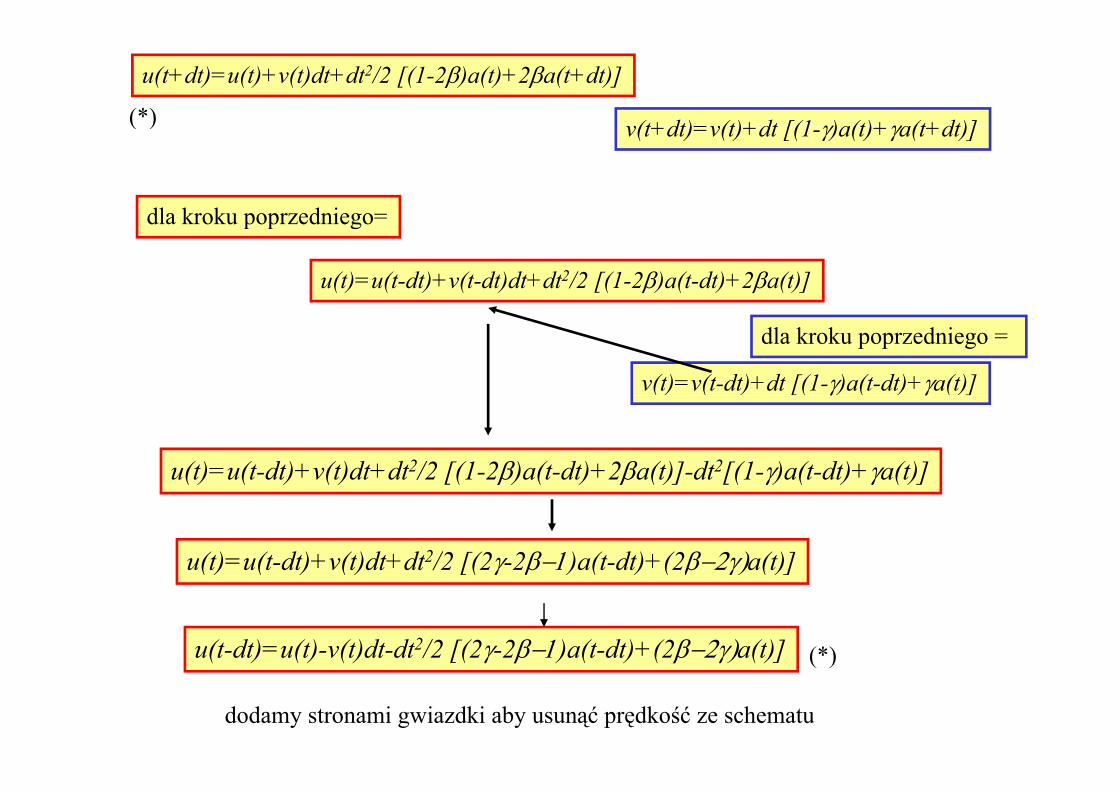
u(t+dt)=u(t)+v(t)dt+dt2/2 [(1-2β)a(t)+2βa(t+dt)]
v(t+dt)=v(t)+dt [(1 γ)a(t)+γa(t+dt)](*) v(t+dt)=v(t)+dt [(1-γ)a(t)+γa(t+dt)]
dla kroku poprzedniego=
( )
dla kroku poprzedniego=
u(t)=u(t-dt)+v(t-dt)dt+dt2/2 [(1-2β)a(t-dt)+2βa(t)]
dla kroku poprzedniego =
v(t)=v(t-dt)+dt [(1-γ)a(t-dt)+γa(t)]( ) ( ) ( γ) ( ) γ ( )
u(t)=u(t-dt)+v(t)dt+dt2/2 [(1-2β)a(t-dt)+2βa(t)]-dt2[(1-γ)a(t-dt)+γa(t)]
u(t)=u(t-dt)+v(t)dt+dt2/2 [(2γ-2β−1)a(t-dt)+(2β−2γ)a(t)]( ) ( ) ( ) ( γ β ) ( ) ( β γ) ( )
u(t-dt)=u(t)-v(t)dt-dt2/2 [(2γ-2β−1)a(t-dt)+(2β−2γ)a(t)] (*)( )
dodamy stronami gwiazdki aby usunąć prędkość ze schematu
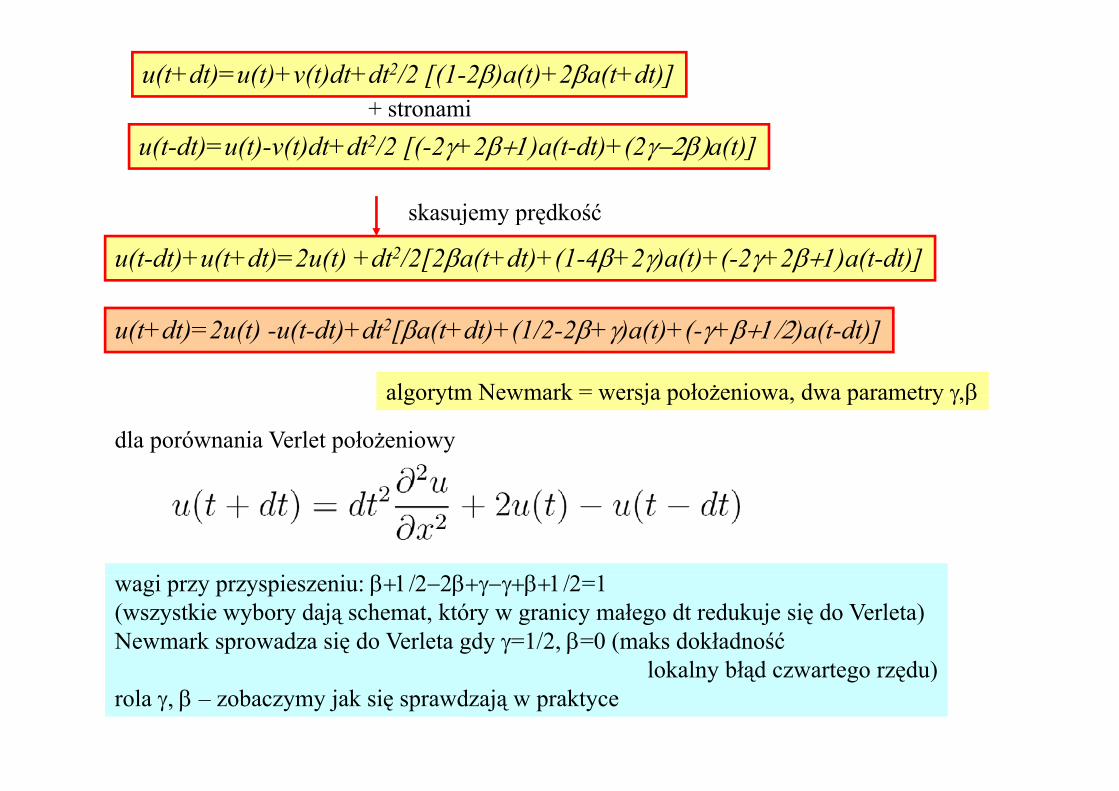
u(t+dt)=u(t)+v(t)dt+dt2/2 [(1-2β)a(t)+2βa(t+dt)]+ stronami
u(t-dt)=u(t)-v(t)dt+dt2/2 [(-2γ+2β+1)a(t-dt)+(2γ−2β)a(t)]
skasujemy prędkość
u(t-dt)+u(t+dt)=2u(t) +dt2/2[2βa(t+dt)+(1-4β+2γ)a(t)+(-2γ+2β+1)a(t-dt)]
skasujemy prędkość
u(t+dt)=2u(t) -u(t-dt)+dt2[βa(t+dt)+(1/2-2β+γ)a(t)+(-γ+β+1/2)a(t-dt)]
algorytm Newmark = wersja położeniowa dwa parametry γ βalgorytm Newmark wersja położeniowa, dwa parametry γ,β
dla porównania Verlet położeniowy
i i i β 1/2 2β β 1/2 1wagi przy przyspieszeniu: β+1/2−2β+γ−γ+β+1/2=1 (wszystkie wybory dają schemat, który w granicy małego dt redukuje się do Verleta)Newmark sprowadza się do Verleta gdy γ=1/2, β=0 (maks dokładność
l k l bł d t d )lokalny błąd czwartego rzędu)rola γ, β – zobaczymy jak się sprawdzają w praktyce
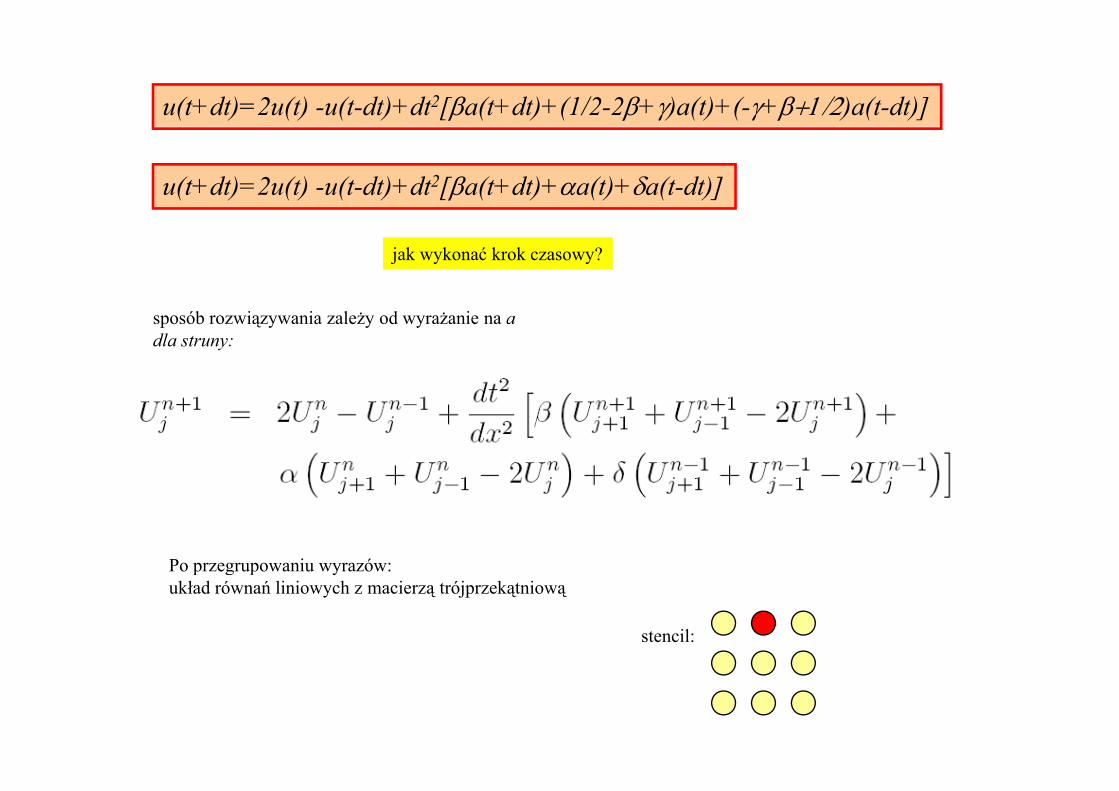
u(t+dt)=2u(t) -u(t-dt)+dt2[βa(t+dt)+(1/2-2β+γ)a(t)+(-γ+β+1/2)a(t-dt)]
u(t+dt)=2u(t) -u(t-dt)+dt2[βa(t+dt)+αa(t)+δa(t-dt)]
jak wykonać krok czasowy?
sposób rozwiązywania zależy od wyrażanie na adla struny:
Po przegrupowaniu wyrazów:p g p yukład równań liniowych z macierzą trójprzekątniową
stencil:
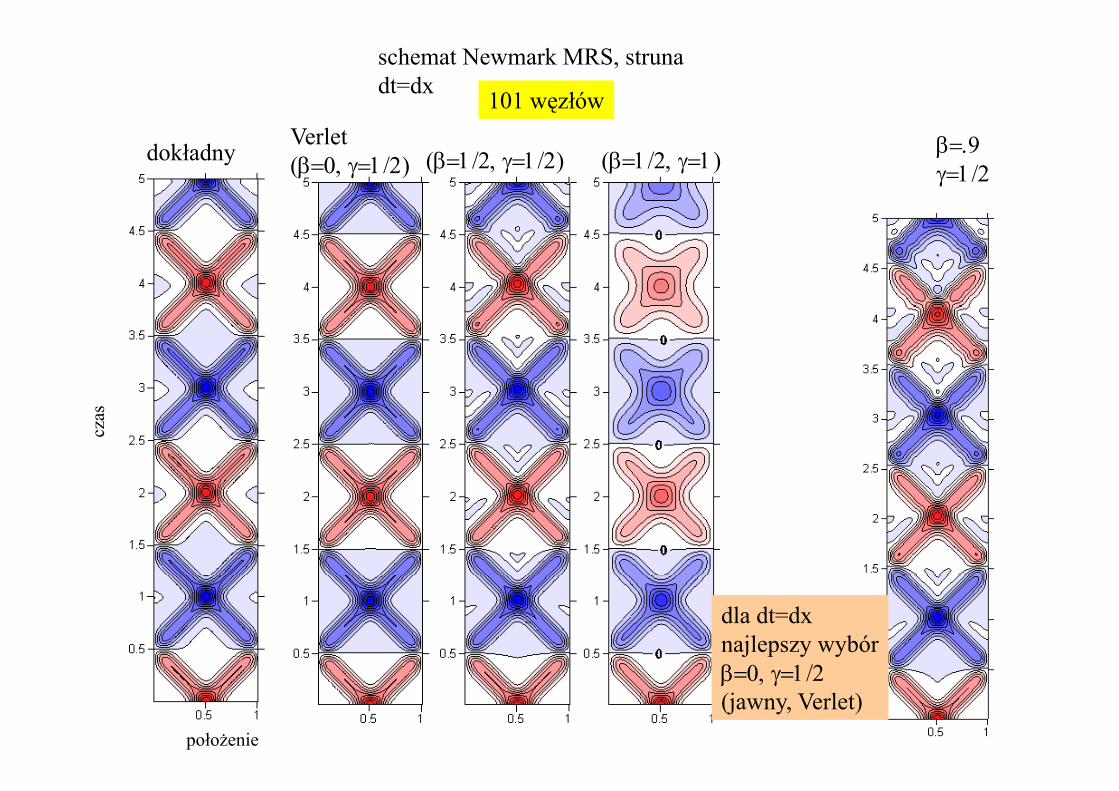
schemat Newmark MRS, strunadt=dx 101 węzłów
dokładnyVerlet(β=0, γ=1/2) (β=1/2, γ=1/2) (β=1/2, γ=1) β=.9
γ=1/2
czas
dla dt=dxnajlepszy wybórβ 0 1/2
położenie
β=0, γ=1/2(jawny, Verlet)
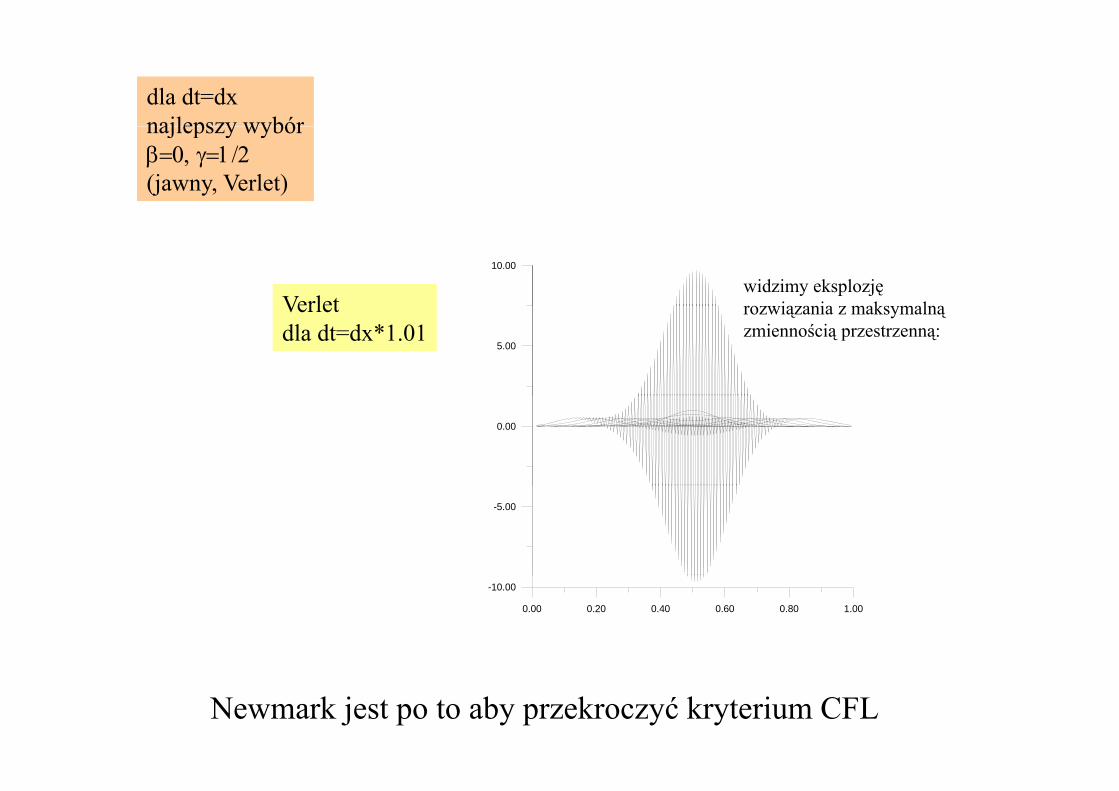
dla dt=dxnajlepszy wybórnajlepszy wybórβ=0, γ=1/2(jawny, Verlet)
10.00
Verletwidzimy eksplozjęro ią ania maks malną
5.00
Verletdla dt=dx*1.01
rozwiązania z maksymalnązmiennością przestrzenną:
0.00
-5.00
0.00 0.20 0.40 0.60 0.80 1.00
-10.00
Newmark jest po to aby przekroczyć kryterium CFL
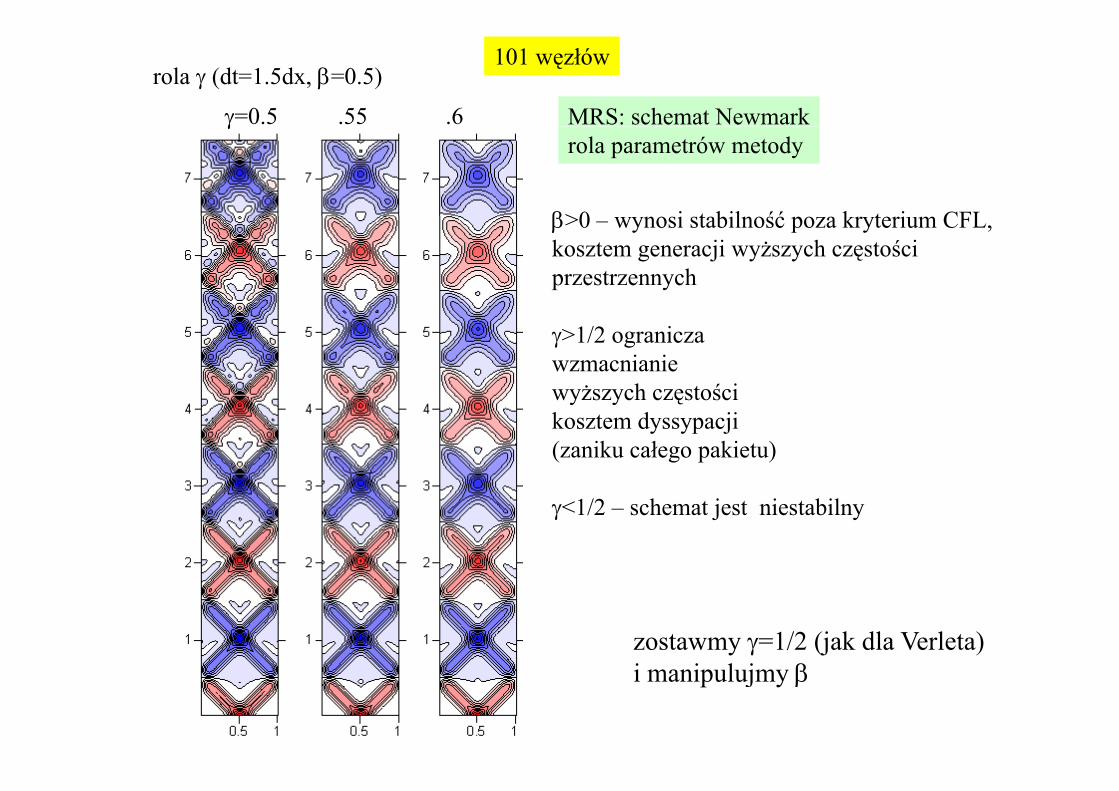
rola γ (dt=1.5dx, β=0.5)
γ=0.5 .55 .6
101 węzłów
MRS: schemat Newmarkγ
β>0 i t bil ść k t i CFL
rola parametrów metody
β>0 – wynosi stabilność poza kryterium CFL,kosztem generacji wyższych częstościprzestrzennych
γ>1/2 ogranicza wzmacnianiewyższych częstościwyższych częstościkosztem dyssypacji(zaniku całego pakietu)
γ<1/2 – schemat jest niestabilny
zostawmy γ=1/2 (jak dla Verleta)i i l j βi manipulujmy β
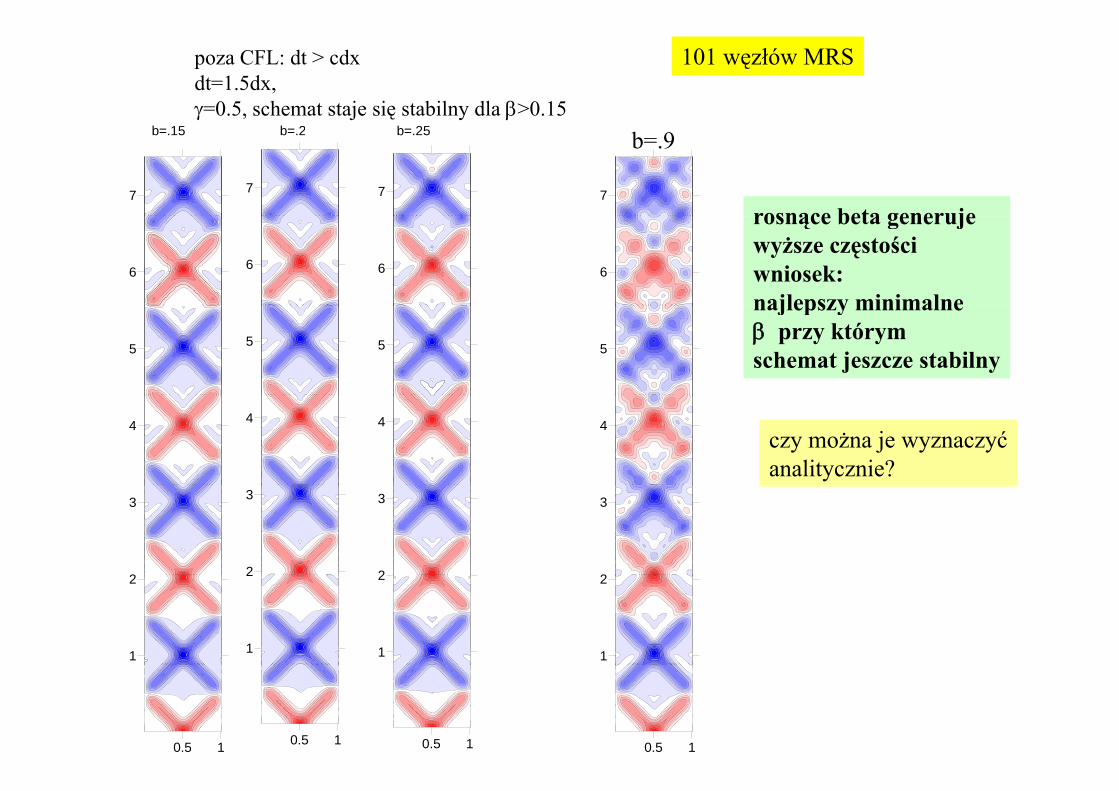
poza CFL: dt > cdxdt=1.5dx, γ=0.5, schemat staje się stabilny dla β>0.15
b 15 b 2 b 25
101 węzłów MRS
7
b=.15
7
b=.2
7
b=.25
7
b=.9
rosnące beta generuje
66 6 6
rosnące beta generujewyższe częstościwniosek: najlepszy minimalne
55 5 5
najlepszy minimalneβ przy którymschemat jeszcze stabilny
44 4 4czy można je wyznaczyćanalitycznie?
2
3
2
3
2
3
2
3
1
2
1
2
1
2
1
2
0.5 10.5 1 0.5 1 0.5 1
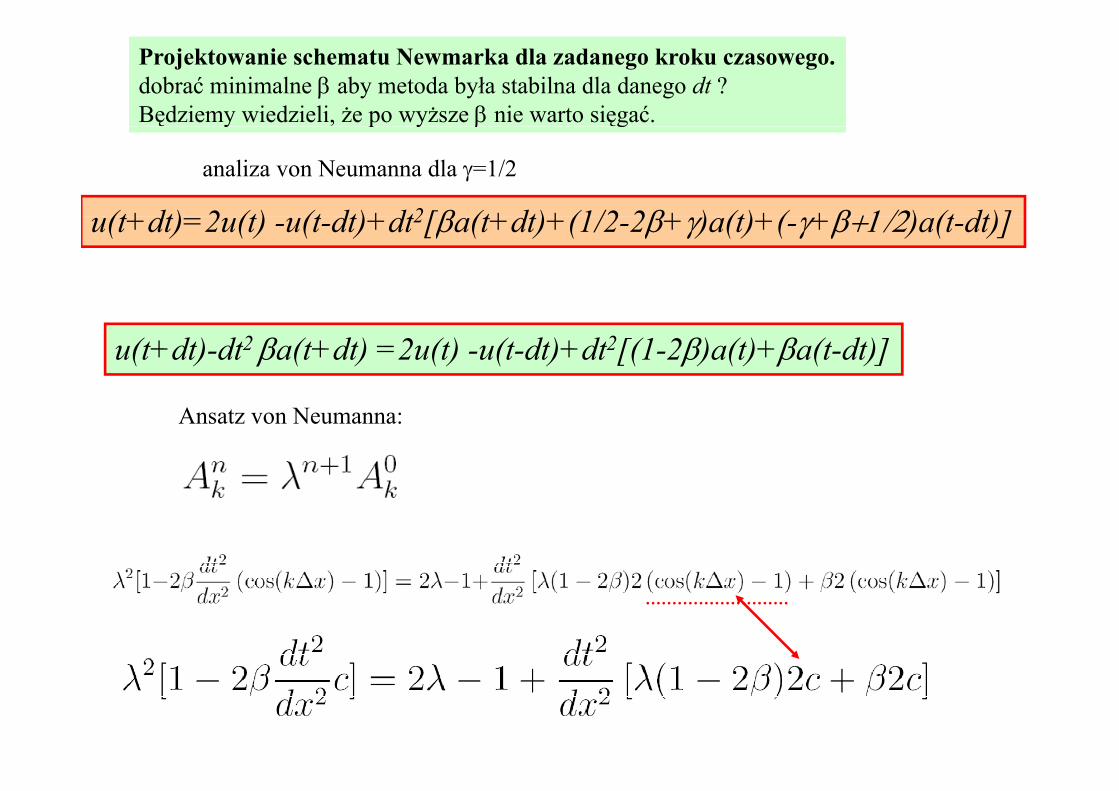
Projektowanie schematu Newmarka dla zadanego kroku czasowego.dobrać minimalne β aby metoda była stabilna dla danego dt ?Będziemy wiedzieli, że po wyższe β nie warto sięgać.y p y β g
analiza von Neumanna dla γ=1/2
(t+dt) 2 (t) (t dt)+dt2[β (t+dt)+(1/2 2β+ ) (t)+( +β+1/2) (t dt)]u(t+dt)=2u(t) -u(t-dt)+dt2[βa(t+dt)+(1/2-2β+γ)a(t)+(-γ+β+1/2)a(t-dt)]
u(t+dt)-dt2 βa(t+dt) =2u(t) -u(t-dt)+dt2[(1-2β)a(t)+βa(t-dt)]
Ansatz von Neumanna:
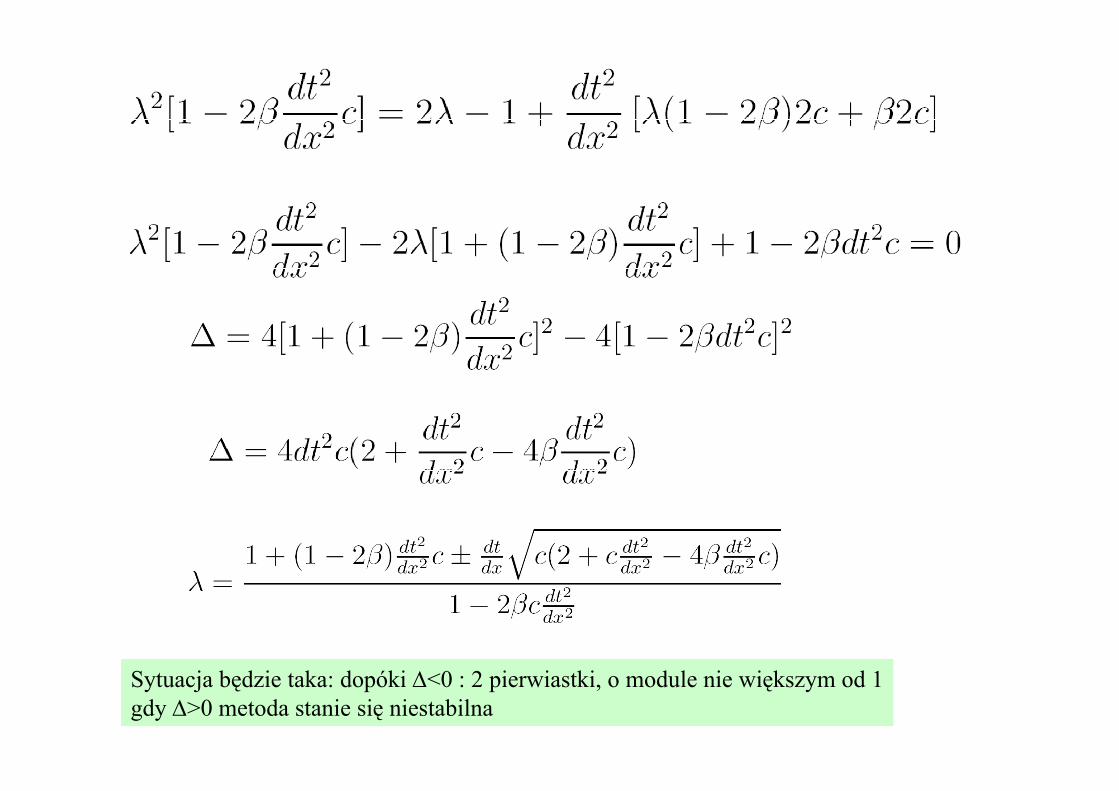
Sytuacja będzie taka: dopóki Δ<0 : 2 pierwiastki, o module nie większym od 1gdy Δ>0 metoda stanie się niestabilna
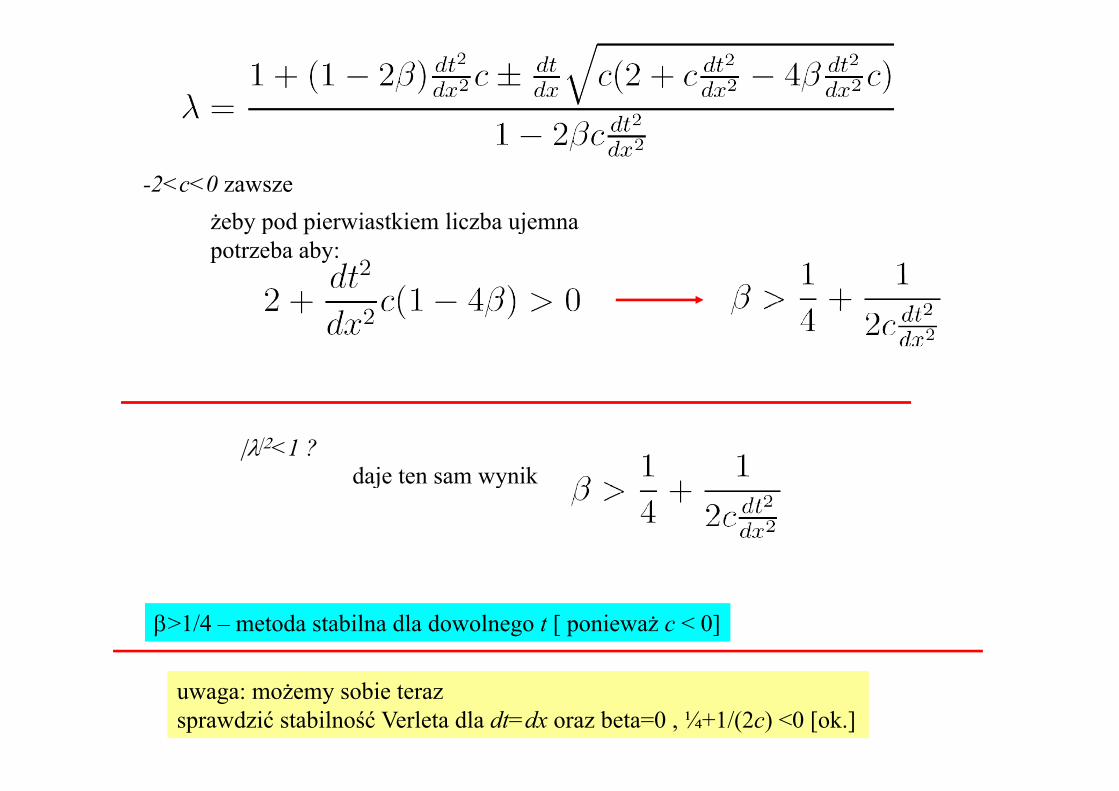
-2<c<0 zawszeż b d i i tki li b jżeby pod pierwiastkiem liczba ujemnapotrzeba aby:
|λ|2<1 ?daje ten sam wynikj y
β>1/4 – metoda stabilna dla dowolnego t [ ponieważ c < 0]
uwaga: możemy sobie terazsprawdzić stabilność Verleta dla dt=dx oraz beta=0 , ¼+1/(2c) <0 [ok.]
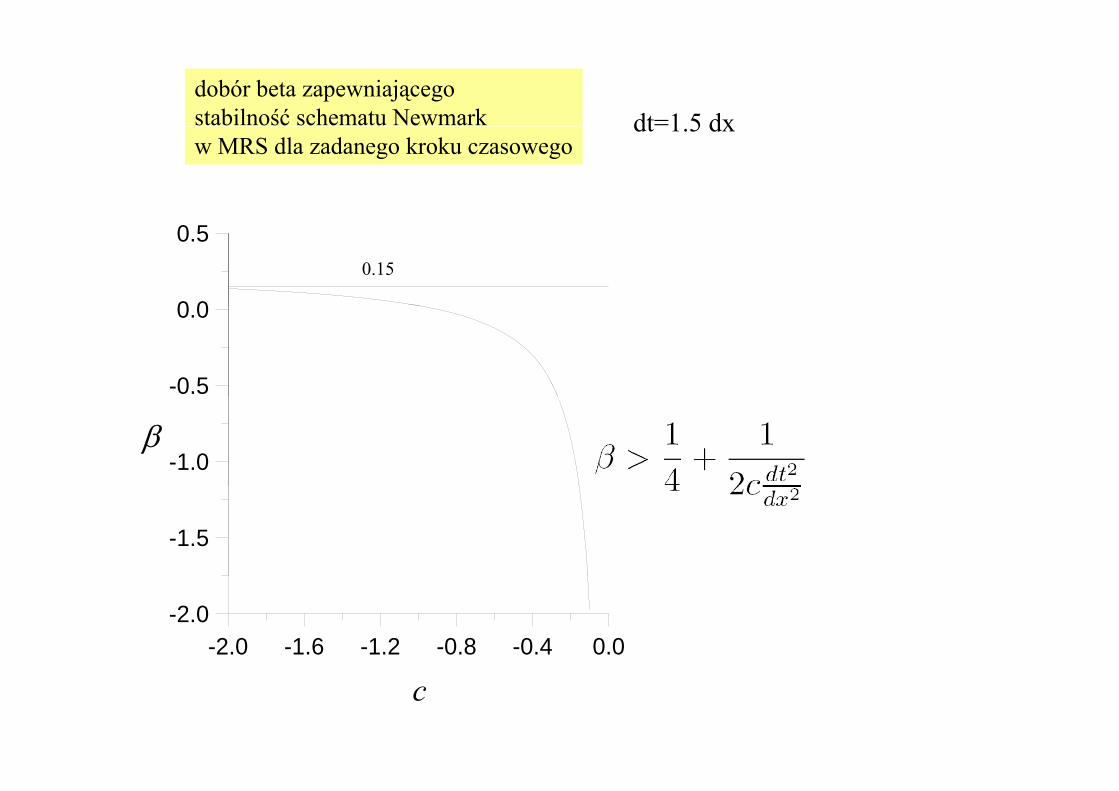
dt=1 5 dxdobór beta zapewniającego stabilność schematu Newmark dt 1.5 dxw MRS dla zadanego kroku czasowego
0 0
0.50.15
-0.5
0.0
-1.0β
-1.5
-2.0 -1.6 -1.2 -0.8 -0.4 0.0-2.0
c

dobór beta zapewniającego stabilność schematu Newmark
2.00
stabilność schematu Newmarkw MRS dla zadanego kroku czasowego
1/4
0 00
1/40 245
0.2501/4
0.00
dt=dx0.240
0.245
dt=15dx-2.00 dt=dx
0.235
-4.00
0 225
0.230
-2.00 -1.60 -1.20 -0.80 -0.40 0.00
-6.00
c
-2.00 -1.60 -1.20 -0.80 -0.40 0.00
0.225
c
2.00
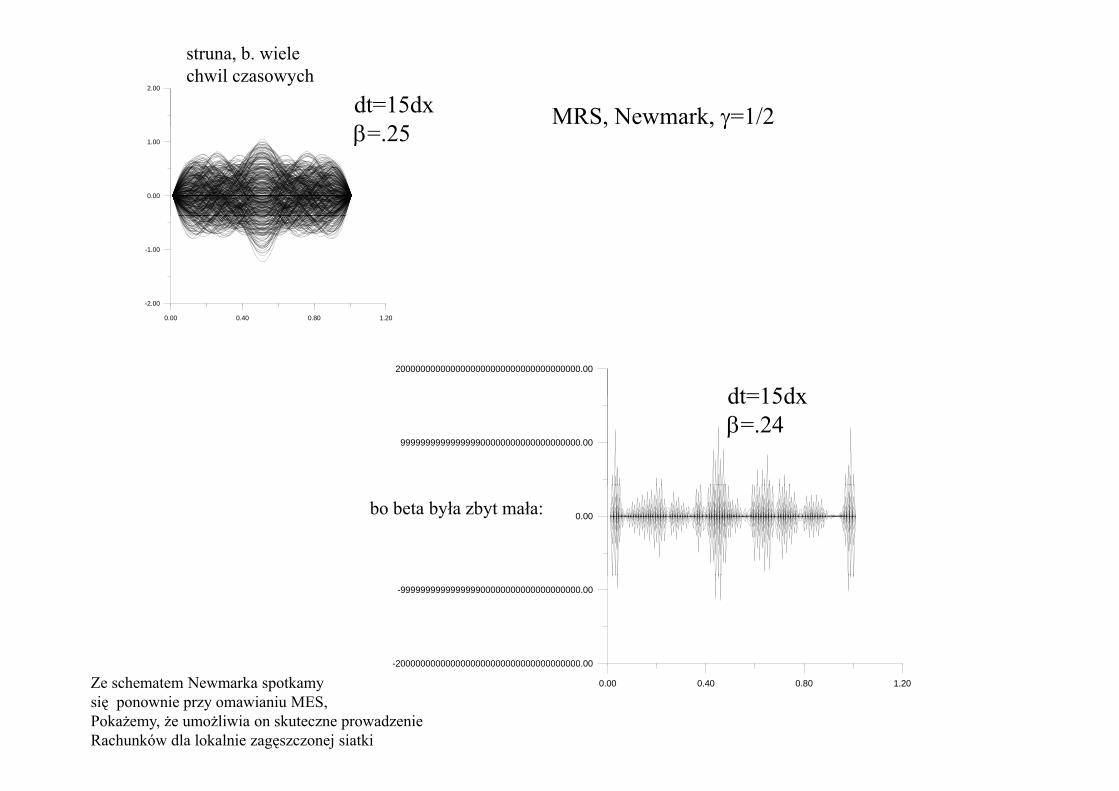
dt=15dxβ 25
MRS, Newmark, γ=1/2
struna, b. wiele chwil czasowych
0.00
1.00 β=.25, , γ
-2.00
-1.00
2000000000000000000000000000000000000.00
dt=15dx
0.00 0.40 0.80 1.20
999999999999999900000000000000000000.00
dt=15dxβ=.24
0.00bo beta była zbyt mała:
-2000000000000000000000000000000000000 00
-999999999999999900000000000000000000.00
0.00 0.40 0.80 1.20
2000000000000000000000000000000000000.00
Ze schematem Newmarka spotkamysię ponownie przy omawianiu MES,Pokażemy, że umożliwia on skuteczne prowadzenie Rachunków dla lokalnie zagęszczonej siatki






![PORÓWNANIE WYNIKÓW OBLICZEŃ WYTRZYMAŁOŚCI … · COSMOSWORKS, z wykorzystaniem metody elementów skończonych (MES) [1]. ... Badanie 6_rch to obliczenia wytrzymałości ramienia](https://static.fdocuments.net/doc/165x107/5c76062f09d3f2ff328bdc34/porownanie-wynikow-obliczen-wytrzymalosci-cosmosworks-z-wykorzystaniem.jpg)











