METODA SZTYWNYCH ELEMENTÓW SKOŃCZONYCH W …kms.polsl.pl/mi/pelne_12/1_12_43.pdf · METODA SES...
8
MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 43, s. 7-14, Gliwice 2012 METODA SZTYWNYCH ELEMENTÓW SKOŃCZONYCH W MODELOWANIU DRGAŃ ELEKTROFILTRÓW IWONA ADAMIEC-WÓJCIK, STANISŁAW WOJCIECH Katedra Transportu i Informatyki, Akademia Techniczno-Humanistyczna w Bielsku-Białej e-mail: [email protected], [email protected] Streszczenie. Oczyszczanie elektrod osadczych w elektrofiltrach suchych jest realizowane przez wzbudzanie ich drgań. Są to drgania o dużych wartościach przyspieszeń. Przedmiotem modelowania w niniejszej pracy jest pojedynczy zestaw elektrod, składający się z belki nośnej, zawieszonych na niej elektrod, będących powłokami o złożonym kształcie oraz drąga strzepującego. Do dyskretyzacji układu zastosowano metodę sztywnych elementów skończonych. Wyniki obliczeń porównano z wynikami otrzymanymi przy zastosowaniu metody hybrydowej oraz pomiarów na specjalnym stanowisku badawczym. 1. WSTĘP Proces usuwania pyłów z elektrod osadczych w znaczącym stopniu wpływa na skuteczność elektrofiltrów. Ważnymi parametrami, służącymi do oceny elektrofiltrów, są maksymalne wartości przyspieszeń stycznych i normalnych, pojawiających się w trakcie drgań elektrod. Ważne dla projektantów są nie tylko wartości maksymalne przyspieszeń, ale również ich równomierny rozkład. Zależą one przy tym zarówno od geometrii układu (grubość, długość i kształt elektrod), jak i od siły uderzenia wzbudzającej drgania. Na rys. 1 przedstawiono pojedynczą sekcję elektrod osadczych, będącą przedmiotem modelowania. Rys.1. Pojedyncza sekcja elektrod osadczych: a) widok ogólny, b) kształt elektrody SIGMA VI, c) typowy przebieg siły uderzenia
Transcript of METODA SZTYWNYCH ELEMENTÓW SKOŃCZONYCH W …kms.polsl.pl/mi/pelne_12/1_12_43.pdf · METODA SES...
MODELOWANIE INŻYNIERSKIE ISSN 1896-771X
43, s. 7-14, Gliwice 2012
METODA SZTYWNYCH ELEMENTÓW SKOŃCZONYCH
W MODELOWANIU DRGAŃ ELEKTROFILTRÓW
IWONA ADAMIEC-WÓJCIK, STANISŁAW WOJCIECH Katedra Transportu i Informatyki, Akademia Techniczno-Humanistyczna w Bielsku-Białej
e-mail: [email protected], [email protected]
Streszczenie. Oczyszczanie elektrod osadczych w elektrofiltrach suchych jest
realizowane przez wzbudzanie ich drgań. Są to drgania o dużych wartościach
przyspieszeń. Przedmiotem modelowania w niniejszej pracy jest pojedynczy
zestaw elektrod, składający się z belki nośnej, zawieszonych na niej elektrod,
będących powłokami o złożonym kształcie oraz drąga strzepującego.
Do dyskretyzacji układu zastosowano metodę sztywnych elementów
skończonych. Wyniki obliczeń porównano z wynikami otrzymanymi przy
zastosowaniu metody hybrydowej oraz pomiarów na specjalnym stanowisku
badawczym.
1. WSTĘP
Proces usuwania pyłów z elektrod osadczych w znaczącym stopniu wpływa na
skuteczność elektrofiltrów. Ważnymi parametrami, służącymi do oceny elektrofiltrów, są
maksymalne wartości przyspieszeń stycznych i normalnych, pojawiających się w trakcie
drgań elektrod. Ważne dla projektantów są nie tylko wartości maksymalne przyspieszeń, ale
również ich równomierny rozkład. Zależą one przy tym zarówno od geometrii układu
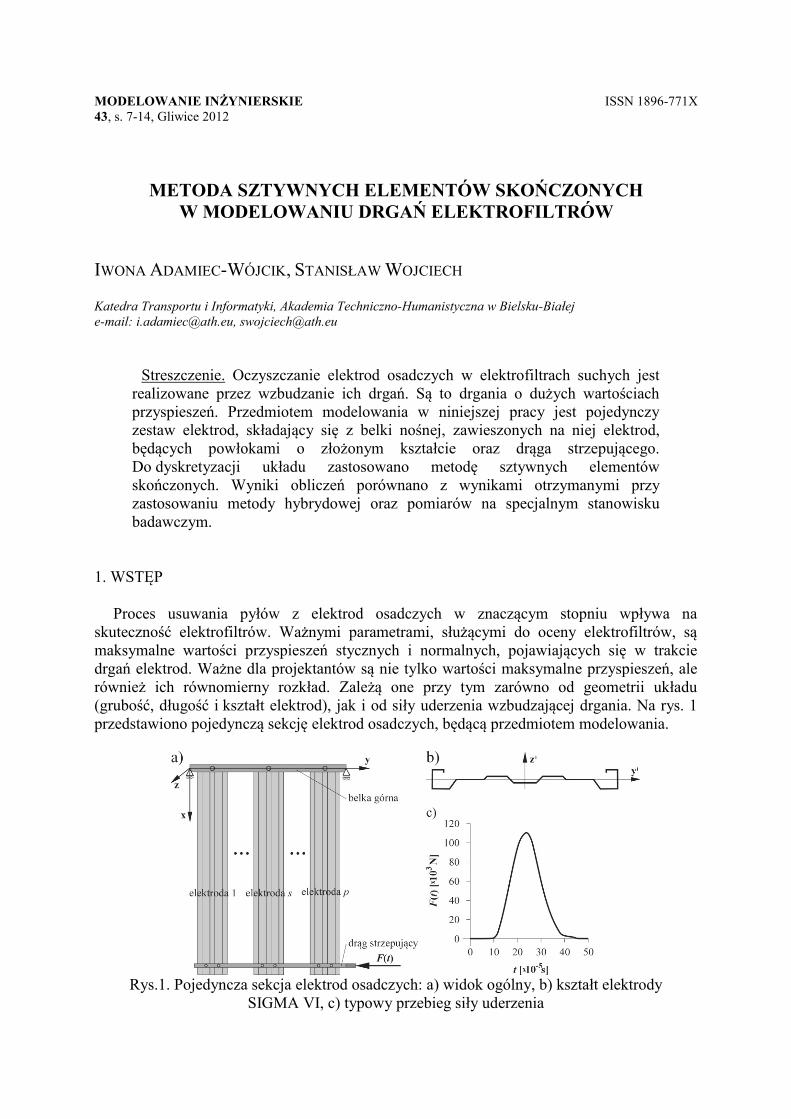
(grubość, długość i kształt elektrod), jak i od siły uderzenia wzbudzającej drgania. Na rys. 1
przedstawiono pojedynczą sekcję elektrod osadczych, będącą przedmiotem modelowania.
Rys.1. Pojedyncza sekcja elektrod osadczych: a) widok ogólny, b) kształt elektrody
SIGMA VI, c) typowy przebieg siły uderzenia

8 I. ADAMIEC-WÓJCIK, S. WOJCIECH
Zagadnienie modelowania tego układu było przedmiotem wcześniejszych prac autorów i ich
współpracowników [1], [5]. Do modelowania układu z rys. 1 stosowano metody: hybrydową,
funkcji sklejanych oraz odkształcalnych elementów skończonych. W każdym przypadku
do dyskretyzacji belek stosowano metodę SES [6]. Natomiast w różny sposób modelowano
elektrody. Belki i elektrody połączone są za pomocą elementów sprężysto-tłumiących [5].
W niniejszej pracy do dyskretyzacji układu zastosowano klasyczną metodę sztywnych
elementów skończonych, zarówno do belek, jak i elektrod. Podobne podejście zastosowano
we wspomnianej wyżej metodzie hybrydowej [3]. Każdy ze sztywnych elementów
skończonych (ses) ma sześć stopni swobody (trzy przemieszczenia translacyjne oraz trzy
rotacyjne). Jednak w metodzie hybrydowej energię odkształcenia sprężystego układu
obliczano przy zastosowaniu klasycznej metody odkształcalnych elementów skończonych.
Zdefiniowano własny element o 24 wielkościach węzłowych. Następnie wyrażono
współrzędne elastyczne (odkształcenia w węzłach) poprzez współrzędne ses.
Podejście zastosowane w tej pracy polega na bezpośrednim wykorzystaniu wzorów
na współczynniki sztywności elementów płytowych, podane w [4], przy pewnych
modyfikacjach, które opisano w następnym rozdziale. Implementacja komputerowa tego
podejścia umożliwiła porównanie wyników obliczeń z otrzymanymi metodą hybrydową
i odniesienie ich do wielkości z pomiarów na stanowisku badawczym.
2. METODA SES – PODZIAŁ PIERWOTNY
Cechą charakterystyczną metody SES jest prowadzenie podziałów pierwotnego i wtórnego
obszaru podlegającego dyskretyzacji. W przypadku elektrod podział pierwotny może być
dokonany zgodnie z ich podziałem na płaskie pasma, a następnie na obszary prostokątne
(rys. 2).
Rys.2. Podział elektrody o m pasmach na elementy pierwotne
METODA SZTYWNYCH ELEMENTÓW SKOŃCZONYCH W MODELOWANIU DRGAŃ … 9
Jeśli przyjąć, że elektroda ma m pasm o stałych długości L oraz szerokości bj(j=1,…,m)
i podzielić każde pasmo na n prostokątów o bokach ,jb x :
L
xn
, (1)
gdzie L – długość elektrody, to w podziale pierwotnym liczba elementów wynosi:
.pN n m (2)
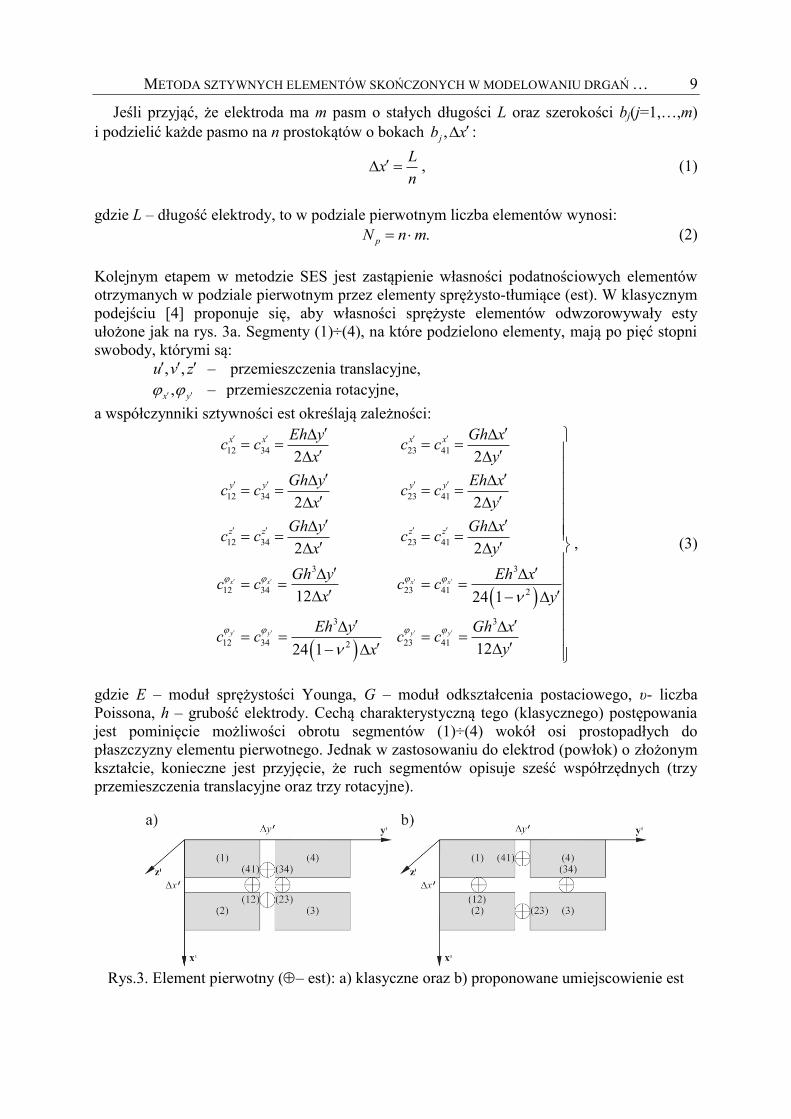
Kolejnym etapem w metodzie SES jest zastąpienie własności podatnościowych elementów
otrzymanych w podziale pierwotnym przez elementy sprężysto-tłumiące (est). W klasycznym
podejściu [4] proponuje się, aby własności sprężyste elementów odwzorowywały esty
ułożone jak na rys. 3a. Segmenty (1)÷(4), na które podzielono elementy, mają po pięć stopni
swobody, którymi są:
, ,u v z – przemieszczenia translacyjne,
,x y – przemieszczenia rotacyjne,
a współczynniki sztywności est określają zależności:
12 34 23 41
12 34 23 41
12 34 23 41
3 3
12 34 23 41 2
3
12 34
2 2
2 2
2 2
12 24 1x x x x
y y
x x x x
y y y y
z z z z
Eh y Gh xc c c c
x y
Gh y Eh xc c c c
x y
Gh y Gh xc c c c
x y
Gh y Eh xc c c c
x y
Eh yc c
3
23 412 1224 1
y yGh x
c cyx
, (3)
gdzie E – moduł sprężystości Younga, G – moduł odkształcenia postaciowego, υ- liczba
Poissona, h – grubość elektrody. Cechą charakterystyczną tego (klasycznego) postępowania
jest pominięcie możliwości obrotu segmentów (1)÷(4) wokół osi prostopadłych do
płaszczyzny elementu pierwotnego. Jednak w zastosowaniu do elektrod (powłok) o złożonym
kształcie, konieczne jest przyjęcie, że ruch segmentów opisuje sześć współrzędnych (trzy
przemieszczenia translacyjne oraz trzy rotacyjne).
Rys.3. Element pierwotny (– est): a) klasyczne oraz b) proponowane umiejscowienie est

10 I. ADAMIEC-WÓJCIK, S. WOJCIECH
Aby ograniczyć obrót segmentów względem osi równoległych do z , wystarczy odsunąć od
siebie elementy sprężysto-tłumiące, tak jak to przedstawiono na rys. 3b. Segmenty mogą
wówczas mieć po sześć stopni swobody, ale ich obroty wokół osi prostopadłych do
płaszczyzny x y są ograniczone przez est.
3. METODA SES – PODZIAŁ WTÓRNY
W podziale wtórnym łączy się sąsiadujące segmenty (jeden, dwa lub cztery), należące do
różnych elementów pierwotnych, w sztywne elementy skończone, jak przedstawiono na rys. 4
oraz rys. 5a.
Rys.4. Numeracja ses elektrody s
W rezultacie otrzymuje się podział elektrody na:
1 1wN m n (4)
elementów sztywnych (ses). Z ses k wiąże się układ osi , , ,, ,C k C k C k x y z , które są głównymi
centralnymi osiami bezwładności elementu. Oś ,C kx jest równoległa do osi x układu
bazowego . Natomiast oś ,C ky jest nachylona do osi y układu bazowego pod kątem
oznaczonym na rys. 5b jako k . Współrzędnymi uogólnionymi ses k są współrzędne wektora:
T
, , ,, , , , , ,k k k k x k y k z kx y z q (5)

METODA SZTYWNYCH ELEMENTÓW SKOŃCZONYCH W MODELOWANIU DRGAŃ … 11
gdzie , ,k k kx y z - przemieszczenia translacyjne, , , ,, ,x k y k z k - przemieszczenia rotacyjne.
Rys.5. Ses k: a) jako połączenie segmentów różnych elementów pierwotnych, b) główne
centralne osie bezwładności, c) oznaczenia współrzędnych est w układzie lokalnym ses
Przemieszczenia będące składowymi powyższego wektora określa się względem położenia
w stanie nieodkształconym układu. Wektor współrzędnych uogólnionych elektrody
s przyjmuje postać:
T
( ) ( )T ( )T ( )T
1w
s s s s
k N
q q q q , (6)
a jej energię kinetyczną można przedstawić w postaci:
( ) ( )T ( ) ( )1
2
s s s sT q M q , (7)
gdzie ( ) ( ) ( ) ( )
1=diagw
s s s s
k NM M M M jest macierzą o stałych elementach,
, , ,diag , , , , ,k k k k x k y k z km m m I I IM ; km - masa elementu k; , , ,, ,x k y k z kI I I - momenty
bezwładności ses k względem osi układu , , ,, ,C k C k C k x y z . Sposób obliczania wielkości
, , ,, , , ,k k x k y k z km I I I daje się łatwo zalgorytmizować [1÷3], [5].
4. ENERGIA ODKSZTAŁCENIA EST
Przyjmuje się, że , , ,s i j jest numerem ses, do którego należy segment elementu
pierwotnego ,i j elektrody s. Energia potencjalna odkształcenia sprężystego elektrody może
być przedstawiona w postaci:
( ) ( )
,
1 1
m ns s
i j
i j
V V
, (8)
gdzie ( )
,
s
i jV jest energią odkształcenia est elementu pierwotnego elektrody s. Wielkości ( )
,
s
i jV
trzeba uzależnić od współrzędnych uogólnionych ses , , ,1s i j ÷ , , ,4s i j . Należy zgodnie
z rys. 3b przyjąć, że:
( ) T T1 1, , , ,12 , , ,12 , , ,12 , , ,23 , , ,23 , , ,232 2
T T1 1, , ,34 , , ,34 , , ,34 , , ,41 , , ,41 , , ,412 2
s
i j s i j s i j s i j s i j s i j s i j
s i j s i j s i j s i j s i j s i j
V
Δ C Δ Δ C Δ
Δ C Δ Δ C Δ, (9)
12 I. ADAMIEC-WÓJCIK, S. WOJCIECH
gdzie , , ,12 , , ,23 , , ,34 , , ,41, , ,s i j s i j s i j s i jC C C C są macierzami 5 5 , diagonalnymi, o elementach
określonych wzorami (3), po przyjęciu parametrów odpowiadających elementowi ,i j
elektrody s; , , ,12 , , ,23 , , ,34 , , ,41, , ,s i j s i j s i j s i jΔ Δ Δ Δ są odkształceniami est. Odkształcenia est,
występujące w powyższym wzorze, są wyrażone w układzie współrzędnych elementu
pierwotnego ,i j , a więc nachylonego do osi y układu bazowego pod kątem j . Ponieważ
osie ,C ky ses są nachylone do osi y pod kątem
j , to po przyjęciu oznaczeń jak na rys. 5c,
można określić współrzędne est , , ,s i j w układzie ses , , ,s i j i , , ,s i j według
zależności:
( , ) ( ) ( )
( , , , ) ( , , , ) ( , , , ) ( , , , )
C
s i j s i j s i j s i j
r U q r , (10.1)
( , ) ( ) ( )
( , , , ) ( , , , ) ( , , , ) ( , , , )
C
s i j s i j s i j s i j
r U q r , (10.2)
gdzie
( , , , ) ( , , , )
( )
( , , , ) ( , , , ) ( , , , )
( , , , ) ( , , , )
1 0 0 0
0 1 0 0
0 0 1 0
s i j s i j
s i j s i j s i j
s i j s i j
z y
z x
y x
U ,
( )
( , , , )
( ) ( )
( , , , ) ( , , , )
( )
( , , , )
s i j
s i j s i j
s i j
x
y
z
r - wektor
współrzędnych lokalnych est w układzie współrzędnych ,( , , , ) ,( , , , ) ,( , , , ), ,C s i j C s i j C s i j x y z ,
1,2 . Współrzędne (10) można wyrazić w układzie współrzędnych elementu ,i j za
pomocą wzorów:
T ( , )
( , , , ) ( , , ) ( , , , ) ( , , , )
C
s i j s i j s i j s i j
r R R r , (11.1)
T ( , )
( , , , ) ( , , ) ( , , , ) ( , , , )
C
s i j s i j s i j s i j
r R R r , (11.2)
gdzie ( , , )s i jR , ( , , , )s i j R - macierze transformacji o stałych elementach [5].
Wyrażenia występujące w (9), postaci:
( , ) T1, , , , , , , , , ,2
s
i j s i j s i j s i jV
Δ C Δ , (12)
powodują, że w równaniach ruchu pojawiają się elementy związane z różniczkowaniem
energii (12) względem ( , , , )s i j q i
( , , , )s i j q otrzymując odpowiednie elementy (podmacierze
6 6 ) macierzy sztywności elektrody s.
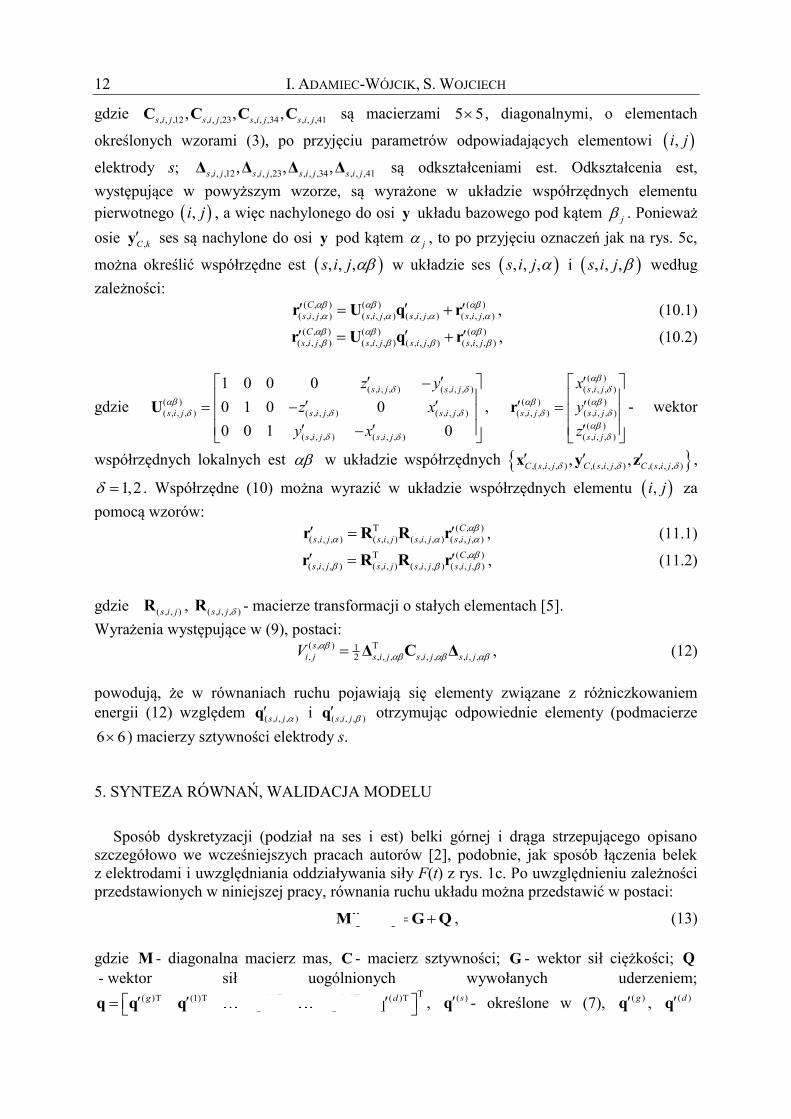
5. SYNTEZA RÓWNAŃ, WALIDACJA MODELU
Sposób dyskretyzacji (podział na ses i est) belki górnej i drąga strzepującego opisano
szczegółowo we wcześniejszych pracach autorów [2], podobnie, jak sposób łączenia belek
z elektrodami i uwzględniania oddziaływania siły F(t) z rys. 1c. Po uwzględnieniu zależności
przedstawionych w niniejszej pracy, równania ruchu układu można przedstawić w postaci:
Mq Cq G Q , (13)
gdzie M - diagonalna macierz mas, C - macierz sztywności; G - wektor sił ciężkości; Q
- wektor sił uogólnionych wywołanych uderzeniem; T
( )T (1)T ( )T ( )T ( )Tg s p d q q q q q q , ( )sq - określone w (7), ( )gq , ( )dq

METODA SZTYWNYCH ELEMENTÓW SKOŃCZONYCH W MODELOWANIU DRGAŃ … 13
- wektory współrzędnych uogólnionych belek. Jeżeli belki górną i dolną podzielono na n(g)
i
n(d)
sztywnych elementów skończonych, to liczba składowych wektora q wynosi:
( ) ( ) ( )
1
6p
g s d
w
s
N n N n
, (14)
gdzie ( ) ( ) ( )1 1s s s
wN n m . Do całkowania równań (13) zastosowano metodę Newmarka.
Ponieważ macierz M jest diagonalna, a macierz C rzadka zastosowano specjalne procedury
do rozwiązywania rzadkich układów równań algebraicznych liniowych.
Model poddano walidacji poprzez porównanie wyników obliczeń z wynikami pomiarów
na specjalnym stanowisku badawczym [5]. Zgodność wyników badano posługując się
wskaźnikami: sprawdzalności 2FAC oraz zgodności q zdefiniowanymi następująco:
1
12
pn
f
s i
ip
FAC a Nn
, (15.1)
1
1 pn
q
s i
ip
q a Nn
, (15.2)
gdzie:
( )
( )
11 dla 2
2
0 w przeciwnym przypadku
i
s
f ii s
o
p
W a
N W a
,
( ) ( )
( )1 dla
0 w przeciwnym przypadku
q
i
i p ios s
p is
N
W a W a
W a
,
i - numer punktu kontrolnego, np – liczba punktów kontrolnych, 0
max s
t T
W a
, T - czas
obliczeń, , ,o p ( )i
s
oW a - wartości uzyskane z obliczeń, ( )ipW a - wartości uzyskane
z pomiarów, , ,s c oznacza odpowiednio przyspieszenie normalne, styczne i całkowite.
Wyniki uznawano za akceptowalne, jeżeli dla badanej wielkości wskaźniki: 2 0,5sFAC a
oraz 0,66sq a .W obliczeniach przyjęto wartość 0,4 . Na rys. 6 przedstawiono oba
wskaźniki.
Rys.6. Walidacja: wskaźniki 2 sFAC a i sq a dla , ,s c

14 I. ADAMIEC-WÓJCIK, S. WOJCIECH
6. PODSUMOWANIE
W artykule przedstawiono zastosowanie klasycznej metody sztywnych elementów
skończonych do modelowania powłok o skomplikowanych kształtach na przykładzie
elektrod osadczych elektrofiltrów. Ze względu na konieczność uwzględnienia sześciu stopni
swobody sztywnych elementów skończonych w podziale wtórnym zaproponowano inne
położenie elementów sprężysto-tłumiących w stosunku do klasycznej metody.
Przeprowadzona walidacja modelu, wykonana poprzez porównanie wyników obliczeń
według zaproponowanego modelu oraz metody hybrydowej a także pomiarów na
specjalnym stanowisku badawczym, wskazują na dużą efektywność numeryczną
i poprawność zastosowanych metod.
LITERATURA
1. Adamiec-Wójcik I., Nowak A., Wojciech S.: Comparison of methods for vibration
analysis of electrostatic precipitators. „Acta Mech. Sinica” 2011, 1, Vol. 27, p. 72–79.
2. Adamiec-Wójcik I.: Modelling of systems of collecting electrodes of electrostatic
precipitators by means of the rigid finite element method. „Archive of Mechanical
Engineering”, Versita, 2011, No. 1, Vol. LVIII, p. 27–47.
3. Adamiec-Wójcik I., Nowak A., Wojciech S.: Application of the finite strip method to
modeling of vibrations of collecting electrodes. „Journal of Sound and Vibration” 2012
(zgłoszony do druku).
4. Kruszewski J., Gawroński W., Wittbrodt E., Najbar F., Grabowski S.: Metoda sztywnych
elementów skończonych. Warszawa: Arkady, 1975.
5. Nowak A: Modelowanie i pomiary drgań elektrod osadczych elektrofiltrów suchych.
Bielsko-Biała: Wyd. Nauk. Akad. Tech. - Human., 2011. Rozprawy naukowe 35. .
6. Wittbrodt, E., Adamiec-Wójcik, I., Wojciech, S.: Dynamics of flexible multibody
systems rigid finite element method. Berlin Heidelberg New York: Springer, 2006.
RIGID FINITE ELEMENT METHOD IN MODELLING
OF VIBRATIONS OF ELECTROSTATIC PRECIPITATORS
Summary. Collecting electrodes in electrostatic precipitators are cleaned by
inducing vibrations with large accelerations. This paper presents modeling of one
section of electrodes which consists of a supporting beam, system of collecting
electrodes which are treated as shells with complicated shape and a brushing bar.
Discretizsation of the system is carried out by the rigid finite element method. The
results of calculations are compared with those obtained using the hybrid finite
element method and experimental measurements.