
Mecanismo de Cuatro Barras. Análisis matemático por números complejos de posición, velocidad y...
5
Mecanismo de cuatro barras Análisis matemático por números complejos Análisis de posición, velocidad y aceleración angular
description
En este documento se hace un análisis matemático por números complejos de la posición, velocidad y aceleración angulares de un mecanismo de cuatro barras.
Transcript of Mecanismo de Cuatro Barras. Análisis matemático por números complejos de posición, velocidad y...
Mecanismo de
cuatro barras Análisis matemático por números complejos
Análisis de posición, velocidad y aceleración angular

Mec
anis
mo
de
cuat
ro b
arra
s
1
Cadenas cinema ticas y mecanismos
Los eslabones están interconec-
tados en pares en puntos de
contacto llamados juntas. Esa
parte de la superficie de los
eslabones la cual hace contacto
con otro eslabón es llamada un
elemento par. La combinación
de dos de estos elementos
constituye un par cinemático.
Nótese la diferencia entre un
par y una junta. Una junta co-
nectando dos eslabones consti-
tuye un par simple. Pares do-
bles, pares triples o pares múl-
tiples, en general, ocurren en
juntas donde tres, cuatro o más
eslabones están conectados.
Mecanismo de cuatro barras Análisis matemático por números
complejos
INTRODUCCIÓN
El mecanismo de cuatro barras es la cadena cinemá-
tica cerrada más simple de eslabones unidos con un
simple grado de libertad (después de unido un es-
labón). Mecanismos más complejos pueden ser
reinventados y mejorados por medio del uso de un
mecanismo de cuatro barras que maneje algún o
algunos otros. Debido a esta propiedad, y debido a
la amplia variedad de movimientos los cuales pue-
den ser generados directamente por mecanismos
de cuatro barras, ellos son a menudo encontrados
en el corazón de máquinas y subsistemas tales
como prensas, máquinas transportadoras, meca-
nismos de retornos rápidos, computadoras análogas
y generadores de funciones.
El estudio del mecanismo de cuatro barras está bien
justificado no sólo debido a sus diferentes aplica-
ciones directas, sino también debido a que la mayo-
ría de los problemas básicos encontrados en diver-
sos mecanismos generales llegan a ser más simples
y más entendibles en la aplicación del mecanismo
de cuatro barras.

Mec
anis
mo
de
cuat
ro b
arra
s
2
Análisis de posición
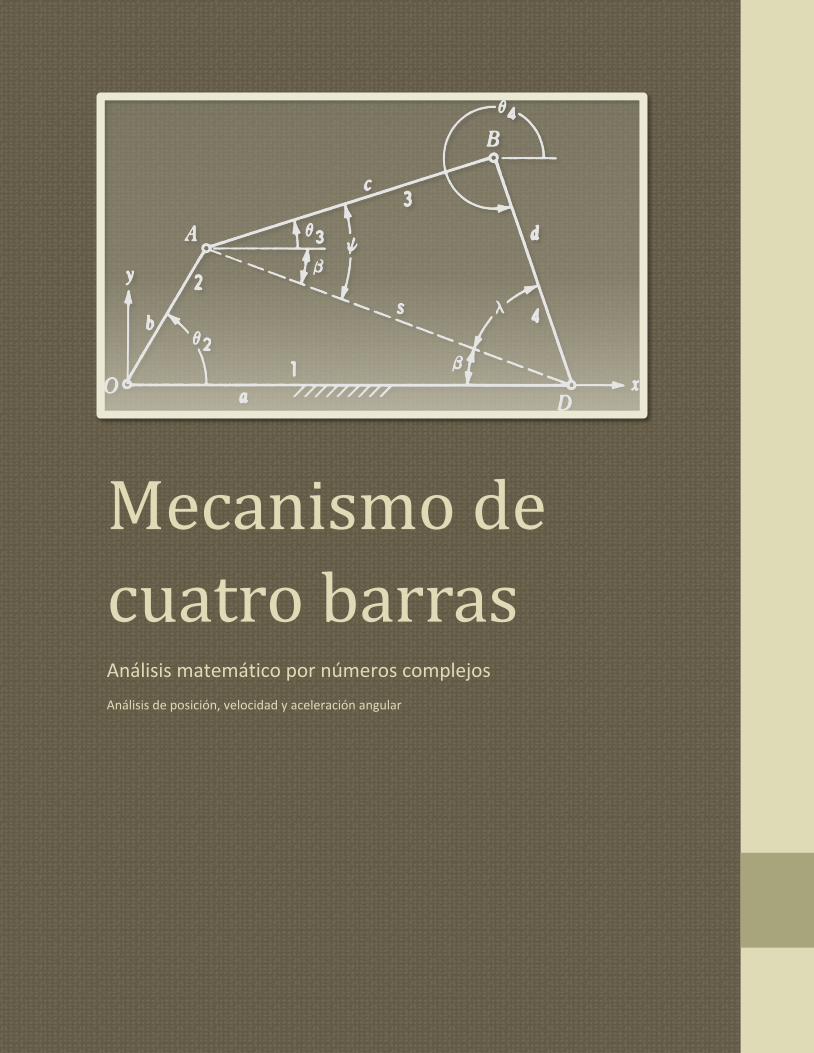
Figura 1. Mecanismo de cuatro barras
Para el mecanismo de cuatro barras mostrado en la figura 1, sea a, b, c y d las literales que deno-
ten las longitudes de los eslabones 1, 2, 3 y 4, respectivamente. El eslabón fijo a es considerado el
eslabón 1. Los ángulos denotan la posición angular de los eslabones 2, 3 y 4,
respectivamente, y son considerados positivos cuando se miden en el sentido contrario de las
manecillas del reloj, como se muestra. La longitud de la diagonal desde A a D es denotada por s y
el ángulo que ésta hace con la línea OD es indicado como . El eslabón 2 es considerado como el
eslabón de entrada o manivela y su posición angular se asume que es conocida.
Los ángulos pueden ser encontrados como prosigue. Considere el triángulo OAD.
Entonces
√
(
)
Para el triángulo ABD,
(
)
(
)
Por observación de la configuración particular del mecanismo, los valores de y son notables.
( )

Mec
anis
mo
de
cuat
ro b
arra
s
3
Análisis de velocidad
Representemos los eslabones con vectores de posición . Entonces
Expresando estos vectores en forma exponencial
Por lo tanto
Si diferenciamos esta ecuación con respecto al tiempo y sea
Entonces
Las partes real e imaginaria de esta ecuación son
Este sistema de ecuaciones puede ser resuelto para como sigue:
Donde
Así, las velocidades angulares de los eslabones 3 y 4 pueden ser obtenidas conociendo la veloci-
dad angular del eslabón 2.
𝜔 𝑑𝜃
𝑑𝑡 𝜔
𝑑𝜃
𝑑𝑡 𝜔
𝑑𝜃
𝑑𝑡
(1)
Mec
anis
mo
de
cuat
ro b
arra
s
4
Análisis de aceleración Ahora consideraremos las aceleraciones. Diferenciando la ecuación (1) con respecto al tiempo y
sea
Obtenemos
( )
( )
( )
Expandiendo esta ecuación en términos de sus partes real e imaginaria, obtenemos dos ecuacio-
nes que pueden ser resueltas para . Haciendo esto y sustituyendo las ecuaciones de veloci-
dad angular en el resultado obtenemos
Estas ecuaciones dan las aceleraciones angulares de los eslabones 3 y 4, respectivamente.
Bibliografí a Martin, G. H. (1969). Kinematics and Dynamics of Machines (International Student Edition ed.). (S.
U. Karl H. Vesper, Ed.) Tokyo, kogakusha, ltd.: McGraw-Hill.
𝛼 𝑑𝜔
𝑑𝑡 𝛼
𝑑𝜔
𝑑𝑡 𝛼
𝑑𝜔
𝑑𝑡


















