MATLAB Simulink modeling and simulation of LVI-based primal–dual neural network for solving linear...
9
Click here to load reader
-
Upload
yunong-zhang -
Category
Documents
-
view
221 -
download
3
Transcript of MATLAB Simulink modeling and simulation of LVI-based primal–dual neural network for solving linear...

ARTICLE IN PRESS
Neurocomputing 72 (2009) 1679–1687
Contents lists available at ScienceDirect
Neurocomputing
0925-23
doi:10.1
� Corr
E-m
URL
journal homepage: www.elsevier.com/locate/neucom
MATLAB Simulink modeling and simulation of LVI-based primal–dual neuralnetwork for solving linear and quadratic programs
Yunong Zhang a,�, Weimu Ma a, Xiao-Dong Li a, Hong-Zhou Tan a, Ke Chen b
a School of Information Science and Technology, Sun Yat-Sen University, Guangzhou 510275, Chinab School of Software, Sun Yat-Sen University, Guangzhou 510275, China
a r t i c l e i n f o
Article history:
Received 11 January 2008
Received in revised form
12 May 2008
Accepted 11 July 2008
Communicated by T. Heskesequality, inequality and bound constraints. For the final purpose of field programmable gate array
Available online 10 September 2008
Keywords:
Neural networks
Circuit implementation
Linear programs
Quadratic programs
MATLAB Simulink modeling and simulation
12/$ - see front matter & 2008 Elsevier B.V. A
016/j.neucom.2008.07.008
esponding author. Tel.: +86 20 84113597; fax
ail addresses: [email protected], zhynong@m
: http://www.ee.sysu.edu.cn/teacher/detail.as
a b s t r a c t
In view of parallel-processing nature and circuit-implementation convenience, recurrent neural
networks are often employed to solve optimization problems. Recently, a primal-dual neural network
based on linear variational inequalities (LVI) was developed by Zhang et al. for the online solution of
linear-programming (LP) and quadratic-programming (QP) problems simultaneously subject to
(FPGA) and application-specific integrated circuit (ASIC) realization, we investigate in this paper the
MATLAB Simulink modeling and simulative verification of such an LVI-based primal-dual neural
network (LVI-PDNN). By using click-and-drag mouse operations in MATLAB Simulink environment, we
could quickly model and simulate complicated dynamic systems. Modeling and simulative results
substantiate the theoretical analysis and efficacy of the LVI-PDNN for solving online the linear and
quadratic programs.
& 2008 Elsevier B.V. All rights reserved.
1. Introduction
Linear-programming (LP) and quadratic-programming (QP)problems have been investigated extensively for the past decades,in view of their fundamental roles arising in a wide variety ofscientific and engineering applications, such as, pattern recogni-tion [1], signal processing [2], human movement analysis [6],robotic control [20,21], and data regression [22]. In the literature,researches usually solve LP and QP problems separately. Inaddition, they usually handle optimization problems only subjectto one or two special kinds of constraints [23]. However,motivated by real engineering applications of LP and QP inrobotics [19–21,24], we have always preferred the followinggeneral formulation:
minimize xTWx=2þ qTx, (1)
subject to Jx ¼ d, (2)
Axpb, (3)
x�pxpxþ, (4)
where coefficient-matrix W is assumed to be positive semi-definite (or even zero) such that the convex QP and LP problemsare both to be handled in this research work.
ll rights reserved.
: +86 20 84113673.
ail.sysu.edu.cn (Y. Zhang).
p?sn=129 (Y. Zhang).
The dynamic-system approach is one of the most importantparallel computational methods for solving online optimizationproblems and related issues [2,7,10,13,20,21]. Recently, dueto the in-depth research in neural networks, numerous dynamicand analogue solvers based on recurrent neural networks havebeen developed and investigated [2,7,9,13,16,19–21,23,24]. Theneural-dynamic approach is now regarded as a powerful alter-native to online computation, in view of parallel distributedprocessing nature and circuit-implementation convenience[1,2,4,7–10,13,20].
Recently, a primal-dual neural network model has beendiscovered, developed and exploited by Zhang et al. [18,20,21],which is designed based on the conversion of LP and QP problemformulation into linear variational inequalities (LVI). This LVI-based primal-dual neural network (LVI-PDNN) has a simplepiecewise-linear dynamics, global exponential convergence tooptimal LP and QP solutions, and superior capability of handlingQP and LP problems in the same unified inverse-free manner. Ascompared with other neural LP/QP solvers such as dual neuralnetworks [23,24], there is no explicit coefficient-matrix inversionof expensively OðdimðWÞ3Þ operations in this LVI-PDNN. Theneural-network architecture and/or computational complexitycould thus be much simpler than other existing recurrent neuralnetworks’, which is also in view of the piecewise-linear dynamicsof such an LVI-based neural network. In addition, compared withtraditional primal-dual neural network [12], this LVI-PDNN hasa simpler dynamic equation with no high-order nonlinear terms

ARTICLE IN PRESS
Y. Zhang et al. / Neurocomputing 72 (2009) 1679–16871680
and also has a more desirable convergence property (i.e., globalexponential convergence to optimal solution). These advantagesmight make the LVI-PDNN approach more probably and widelyused in practice [1,7,18,20–22].
Towards the final purpose of field programmable gate array(FPGA) and application-specific integrated circuit (ASIC) realiza-tion, we investigate in this paper the MATLAB Simulink modelingand simulative verification [14] of such an LVI-PDNN. To the bestof our knowledge, there is little work dealing with the MATLABSimulink modeling of recurrent neural networks in the literatureat present stage. However, the MATLAB Simulink modeling mightbe an important and necessary step for the final hardwarerealization of recurrent neural networks [3], in addition tomathematical analysis. Moreover, by using the Simulink HDLCoder (with HDL denoting Hardware Description Language), therecurrent neural networks developed in Simulink environmentcould further be extended to the HDL code and then to the FPGAand ASIC realization [11,15].
The remainder of this paper is organized in five sections.The mathematical model of LVI-PDNN for solving online QP/LP(1)–(4) is presented and analyzed in Section 2. MATLABSimulink modeling and simulation techniques are studied andexploited in Section 3 for such an LVI-PDNN model. The neural-network behavior of global exponential convergence tooptimal solutions is illustrated via numerical experiments inSection 4. Lastly, Section 5 concludes the paper with final remarks.The main contributions of this paper are worth pointing out asfollows.
(1)
In this paper, we present an LVI-PDNN, which could handlethe hybrid-constraint QP and LP problems depicted in (1)–(4).In addition to global exponential convergence to optimalsolutions, such a recurrent neural network has a simplepiecewise-linear dynamics and might be realized via FPGAand ASIC implementation more readily than other existingneural models.(2)
In this paper, we show that, by using convenient click-and-drag mouse operations (instead of conventional compilationof program code), the LVI-PDNN simulation model can be builtup systematically and easily by means of MATLAB Simulinkfunction blocks. Programming efforts could thus be reduceddrastically.(3)
To show the characteristics of the LVI-PDNN, two illustrativeexamples with a large number of numerical experiments arepresented. The first example is about online solution of astrictly-convex quadratic program, while the second one isabout online solution of a linear program for comparisonpurposes. Modeling and simulative results substantiate theefficacy and hardware-realizability of the LVI-PDNN forsolving both QP and LP problems.2. The LVI-PDNN model
In this section, we briefly describe the LVI-PDNN, its structureand theoretical results.
2.1. Model description
To solve online the QP or LP problem depicted in (1)–(4), basedon the conversion of such a QP/LP to a set of LVI and then to asystem of piecewise linear equations, a primal-dual neuralnetwork could be developed with its dynamics given as follows[18,20,21]:
_y ¼ gðI þ HTÞfPOðy� ðHyþ pÞÞ � yg, (5)
where g40 is an inductance parameter or the reciprocal of acapacitance parameter used to scale the network convergence,and should be set as large as possible in hardware implementation[2,7,9,13,20]. The primal-dual decision vector y 2 Rn and its upper/lower bounds B� are defined, respectively, as
y ¼
x
u
v
264375; Bþ ¼
xþ
$
$
264
375 2 Rn; B� ¼
x�
�$
0
264
375 2 Rn, (6)
where, with n ¼ dimðxÞ þ dimðuÞ þ dimðvÞ defined,
�
x 2 ½x�; xþ� is evidently the original decision variable vectorused in primal QP/LP (1)–(4); � u 2 RdimðdÞ denotes the dual decision variable vector defined forequality constraint (2);
� vX0 2 RdimðbÞ denotes the dual decision variable vector definedfor inequality constraint (3); and,
� $ is a vector of appropriate dimensions with each elementsufficiently large to replace þ1 numerically.
In LVI-PDNN dynamic Eq. (5), POð�Þ is an operator which projectsan n-dimensional vector onto the set O:¼½B�; Bþ� � Rn. In addition,the ith element of POðyÞ is
PðiÞO ðyiÞ ¼
B�i if yioB�i ;yi if B�i pyipBþi ;Bþi if yi4Bþi :
8><>: (7)
The coefficient-matrix H 2 Rn�n and vector p 2 Rn appearing in(5) are defined by augmentation as follows:
H ¼
W �JT AT
J 0 0
�A 0 0
264
375; p ¼
q
�d
b
264
375. (8)
2.2. Network architecture
Expressed in the ith-neuron form (with i ¼ 1; . . . ;n), LVI-PDNNmodel (5) can be further written as
dyi
dt¼ g
Xn
j¼1
cij PðjÞOXn
k¼1
sikyk � pi
!� yj
" #, (9)
where cij denotes the ijth entry of scaling matrix C ¼ I þ HT , andsik denotes the ikth entry of matrix S ¼ I � H. The block diagramrealization of LVI-PDNN (5) could be given in Fig. 1, while a moredetailed architecture of the neural network based on neuronexpression (9) is shown in Fig. 2. The piecewise-linear projectionoperator (or called piecewise-linear activation function) POð�Þ
can be implemented by using operational amplifiers known aslimiter [2,5,9,23].
Before ending this subsection, it is worth noting the followingtwo remarks.
Remark 1. As bound constraint (4) is neatly cast into theprojection set O, the dual decision variable vector originallydefined for bound constraint (4) is finally removed. Thus, the sizeof LVI-PDNN neural system (5) is only n, being the dimensionalsum of equality constraint (2), inequality constraint (3) and primaldecision vector x, of which the number is surprisingly the same asthat in dual neural network [23,24].
Remark 2. In view of Eq. (9) and Fig. 2, the circuit implementingthe LVI-PDNN (5) consists of n integrators, n limiters (beingthe piecewise-linear activation functions), 2n2 multipliers and

ARTICLE IN PRESS
Fig. 1. Block diagram realization of LVI-PDNN (5) for solving QP/LP (1)–(4).
Fig. 2. Network architecture of LVI-PDNN (5) for solving QP/LP (1)–(4).
Y. Zhang et al. / Neurocomputing 72 (2009) 1679–1687 1681
5n summers. In contrast, for solving the same LP and QP problem,even without counting the computational complexity OðdimðWÞ3Þof online matrix inversion, the circuit implementation ofdual neural network [23,24] needs n integrators, n limiters,ð2þ dimðWÞÞn2 þ ðdimðWÞ2 þ dimðWÞÞn multipliers and n2 þ
ðdimðWÞ þ 4Þn summers. Modeling results here and in the ensuingsection both substantiate that the presented LVI-PDNN could havean at-least half reduction of the structural and computationalcomplexity (especially, in terms of the numbers of multipli-cations and additions/subtractions), as compared to the dual-neural-network model.
2.3. Global convergence
Moreover, summarized from the analysis results of[17,18,20,21], the following lemmas could be given about theglobal exponential convergence and stability of the LVI-PDNN (5)[or its neuron form (9)].
Lemma 1. Assume the existence of at least one optimal solution x to
the QP/LP optimization problem (1)–(4). Starting from any initial
state yð0Þ 2 Rn, the state vector yðtÞ of the LVI-PDNN (5) is always
convergent to an equilibrium state y, of which the first dimðxÞ

ARTICLE IN PRESS
Y. Zhang et al. / Neurocomputing 72 (2009) 1679–16871682
elements constitute the optimal solution x. Furthermore,the exponential convergence can be achieved for LVI-PDNN (5),provided that there exists a constant R40 such that ky�POðy�
ðHyþ pÞÞk22XRky� yk2
2 holds true.
Lemma 2. The existence of equilibrium state y of the LVI-PDNN (5)is equivalent to the condition that the feasible region made by
constraints (2)–(4), denoted by F, is nonempty. In contrast to
Lemma 1, if the feasible region F made by constraints (2)–(4) is
empty (i.e., F ¼+), then the state vector yðtÞ of the LVI-PDNN (5) is
generally divergent.
3. MATLAB Simulink modeling
MATLAB Simulink is a graphical-design based modelingtool which exploits existing function blocks to constructmathematical and logical models and process flow [14].The MATLAB Simulink modeling could thus be viewed asa virtual implementation of a real system that satisfies a set ofengineering requirements. Moreover, as mentioned before, theneural-network model developed in MATLAB Simulink environ-ment could be extended to the HDL code and then to the finalFPGA and ASIC realization [11,15]. In this section, the MATLABSimulink modeling techniques are investigated as follows for theLVI-PDNN (5).
3.1. Basic function blocks
MATLAB Simulink includes a comprehensive block library ofsinks, sources, linear and nonlinear components, and connectors.The Simulink function blocks used to construct the LVI-PDNNmodel (5) are shown in Fig. 3 and briefed below.
�
Fu
Co
The Constant block, which outputs a constant specified by itsparameter ‘‘constant value’’, could be used to generate thematrices W , J, A and the vectors q, d, b, x� appearing in QP/LP(1)–(4) and LVI-PDNN (5).
� The Gain block could be used to scale the LVI-PDNN networkconvergence, e.g., as a representation of design parameter g inthe neural-network system (5).
� The Product block, specified as the standard matrix-productmode, could be used to multiply the matrices and vectorsinvolved in the neural-network system (5).
� The MATLAB Fcn block could be used to generate zero matrix 0,identity matrix I, vector of ones, and so on.
SumScope
SaturationDynamic
upulo
y
Product
Mux
MatrixConcatenate
2Mathnction
eu
MATLAB Fcn
MATLABFunction
Integrator
1s
Gain
1
Display
nstant
1
Fig. 3. Basic Simulink function blocks used for constructing LVI-PDNN (5).
�
The Math Function block could perform various commonmathematical operations, and is used in our context only forgenerating the transpose of a matrix.Other Simulink function blocks involved in modeling (5) will beintroduced later when encountered. By interconnecting thesebasic Simulink function blocks and setting appropriate block-parameters, the model of LVI-PDNN (5) can thus be built upreadily.
3.2. Generating matrix H
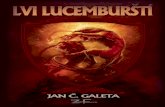
As seen from Eq. (8) and Fig. 1, the augmented coefficient-matrix H in LVI-PDNN (5) is composed of matrices W , J, A, theirtransposes, and zero matrices. For simple simulation purposes,one may pre-assign the value of H directly from Eq. (8) and thenuse H for constructing neural-network model (5). However, for thepurposes of systematic modeling and further circuit-implementa-tion, we prefer to use the Math Function block and Matrix
Concatenate block to generate matrix H automatically via Eq. (8)and from matrices W , J and A.
�
To construct the sub-model for generating matrix H, using theMath Function block, we can select the ‘‘transpose’’ functionfrom its ‘‘function’’ parameter list. � The Matrix Concatenate block concatenates input matrices tocreate an output matrix. In our modeling context, this blockoperates in a multidimensional-array mode and uses its‘‘concatenate dimension’’ parameter to specify the outputdimension along which to concatenate the input matrices.For example, to concatenate two matrices vertically, we couldspecify its ‘‘concatenate dimension’’ parameter as ‘‘1’’; and, toconcatenate two matrices horizontally, we could specify its‘‘concatenate dimension’’ parameter as ‘‘2’’.
The Simulink subsystem for generating matrix H is shown inFig. 4, which is a part of the Simulink model of LVI-PDNN (5).Its corresponding block-diagram design and representation areshown in Fig. 4(a). In total, to construct this subsystem, we exploittwo Math Function blocks, four Matrix Concatenate blocks, twoGain blocks, one MATLAB Fcn block, and three Constant blocks.
3.3. Constructing projection operator POð�Þ
As seen from Eq. (5) and Fig. 1, before constructing theLVI-PDNN in MATLAB Simulink environment, we have to build upthe projection operator POð�Þ defined in Eq. (7). This projectionoperator is also termed piecewise-linear activation function [5,23]or Saturation function [14]. In modeling the projection operatorPOð�Þ, we can exploit the Simulink Saturation Dynamic block as itsupper and lower bound-values could be determined dynamicallyvia the first and third inputs. Then, the Saturation Dynamic blocklimits the range of the second input within the first input(as upper bound) and the third input (as lower bound). As seenfrom the defining Eqs. (6) and (7), the upper and lower bound-values of such a Saturation Dynamic block in our case are
Bþ ¼xþ
$
$
264
375; B� ¼
x�
�$
0
264
375.
The Simulink subsystem for constructing projection operatorPOð�Þ could thus be developed and depicted in Fig. 5, being a partof the Simulink model of LVI-PDNN (5). Here, we use 109 toconstitute$ through the MATLAB Fcn blocks and Gain blocks, with

ARTICLE IN PRESS
W
J
A
−JT AT
WJ−A
zeros 2
MATLABFunction
Matrix W
[3x3]
Matrix J
[1x3]
Matrix 22
Matrix A
[2x3]
MatrixConcatenate 1
1
Matrix Concatenate 3
1
MatrixConcatenate 4
2
JT
uT −1
Gain
−1
AT
uT
0000
−JT AT
00
00
W −JT AT
J 0−A 0
00
Fig. 4. Subsystem for generating matrix H used in LVI-PDNN (5). (a) Block-diagram representation and (b) corresponding Simulink model.
xi_plus
[3x1]
xi_minus
[3x1]ones 2
MATLABFunction
ones 1
MATLABFunction
SaturationDynamic
upu
lo
y
Mux 2
Mux 1Matrix J
[1x3]
Matrix A
[2x3]
0
−1109
−K−109
−K−
Fig. 5. Simulink model for constructing projection function POð�Þ.
Y. Zhang et al. / Neurocomputing 72 (2009) 1679–1687 1683

ARTICLE IN PRESS
Y. Zhang et al. / Neurocomputing 72 (2009) 1679–16871684
MATLAB Fcn blocks generating properly-dimensioned vectorsmade of ones.
3.4. Final options setting
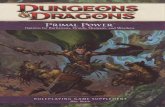
After developing the subsystems for generating H and POð�Þ asshown in the preceding two subsections, the overall Simulinkmodel of LVI-PDNN (5) can thus be built up easily and presentedin Fig. 6. Prior to running the Simulink model, we may need to setup a few environment-options and parameters, such as,
�
Ma
[2
Start time (e.g., 0:0) and Stop time (e.g., 6:0);
� Solver (i.e., integrator algorithm): ‘‘ode15s’’;zeros 2
MATLABFunction
xi_plus
[3x1]
xi_minus
[3x1]
ones 2
MATLABFunction
ones 1
MATLABFunction
Ve
SaD
upulo
Mux 2
Mux 1
Matrix W
[3x3]
Matrix J
[1x3]
Matrix H2
trix A
x3]
MatrixConcatenate 3
1MatrixConcatenate 2
2
MatrixConcatenate 1
1
JT
uT
0
−1
−1
Gain
−1
AT
uT
109
−K−
109
−K−
Fig. 6. Overall Simulink modeling of LVI-based primal-dual neural netwo
Fig. 7. Simulink configuration dialog-box for setting up the envir
�
V
ctor d
[0]
turatynam
rk (
onm
Max step size (e.g., 0:2) and Min step size (e.g., ‘‘auto’’);
� Initial step size (e.g., ‘‘auto’’); � Relative tolerance (e.g., 10�3); � Absolute tolerance (e.g., ‘‘auto’’); � Maximum order (e.g., 5).This options setting can be done by using the ‘‘configurationparameters’’ dialog box in MATLAB Simulink environment, whichis illustrated in Fig. 7 for readers’ convenience. Other environ-ment-options may be assigned to be their default values. Forexample, to draw more clearly the x-trajectory figures (such asFig. 9), we can save the following variables to workspace byticking them off: time (tout) and states (yout).
y
I−H
I+HT
p
gamma
10
ector q
[3x1]
Vector b
[−1; 4]
Scope
ionic
y
Matrix I
MATLABFunction
MatrixConcatenate 5
1
Integrator
1s
HT
uT
−1
Display
2
1
−6
0.0001773
2
8.208e−006MatrixMultiply
MatrixMultiply
+−
+−
++
+−
5) for solving online the QP and LP problems depicted in (1)–(4).
ent-options and parameters of modeling LVI-PDNN (5).

ARTICLE IN PRESS
−4−2
02
4
−4−2
02
4−8
−6
−4
−2
0
2
4
x1
x2
x 3
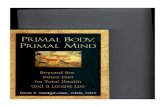
Fig. 9. Spatial trajectories of ðx1 ; x2; x3Þ synthesized by LVI-PDNN (5), starting from
ten different initial states and converging to the joint equilibrium state x denoted
by *, which is the theoretical optimal solution to QP (1)–(4).
Fig. 8. Simulink ‘‘Scope’’ illustration of yðtÞ of LVI-PDNN (5) solving QP problem.
Y. Zhang et al. / Neurocomputing 72 (2009) 1679–1687 1685
4. Simulative verification
Based on the MATLAB Simulink modeling techniques investi-gated in the preceding section and Fig. 6, the neural-networkbehavior is shown in this section via the following two illustrativeexamples. Simply speaking, the first example is about QP, whilethe second one is about LP.
Example 1. We consider the online solution of the followingstrictly-convex QP problem [23] by LVI-PDNN (5):
minimize 11x21 þ x2
2 þ x23 � 2x1x2 þ 6x1x3 � 4x1,
subject to 2x1 þ 2x2 þ x3 ¼ 0,
� 1x1 þ x2p� 1,
3x1 þ x3p4,
� 6px1; x2; x3p6,
which could be rewritten in the compact matrix form, (1)–(4), andthus we could have the coefficient matrices and vectors defined asq ¼ ½�4;0;0�T, J ¼ ½2;2;1�, d ¼ 0, b ¼ ½�1;4�T, xþ ¼ �x� ¼ ½6;6;6�T,and
W ¼
22 �2 6
�2 2 0
6 0 2
264
375; A ¼
�1 1 0
3 0 1
� �.
After assigning the values of W , q, J, d, A, b and x� into theSimulink model depicted in Fig. 6, the transient behavior andperformance of LVI-PDNN (5) could be simulated readily.
�
The simulation result starting from zero initial state yð0Þ ¼ 0 2R6 is illustrated in Fig. 8. With g ¼ 10, state vector yðtÞ 2 R6of LVI-PDNN (5) converges to equilibrium statey ¼ ½2;1;�6;1:773� 10�4;2;8:208� 10�6
�T in 3.72 s, and itsfirst 3 elements constitute numerically the optimal solutionx ¼ ½2;1;�6�T to the above QP problem.
� The simulation result starting from random initial stateyð0Þ 2 ½�5;5�6 is illustrated in Fig. 9. Note that, here, the‘‘initial condition’’ parameter of the Integrator block is set tobe 10 ðrandð6; 1Þ � 1=2Þ. It is seen from Fig. 9, started with aninitial state randomly selected within ½�5;5�6, the LVI-PDNN
(5) always converges to the optimal solution x of such a QPproblem.
� We observe from a large number of numerical tests ofLVI-PDNN (5) that, with design parameter g ¼ 104, the averageconvergence time for achieving the accuracy of 10�3 is about4:46 ms. In addition, with exponential convergence guaranteed[20,21,18,17], when design parameter g ¼ 107, the averageconvergence time for achieving the accuracy of 10�3 is about4:40ms.
Example 2. We consider the online solution of the following LPproblem [2] by LVI-PDNN (5):
minimize � x1 � 5x2 þ 2x5 þ 3,
subject to x1 þ x3 þ 2x4 ¼ 7,
x1 þ 2x2 � x3 þ 4x5 ¼ 11,
0px1p4; 0px2p5; 0px3p1,
0px4p2; 0px5p3,
which could be rewritten in the compact matrix form, (1)–(4), andthus we could have the coefficient matrices and vectors defined asW ¼ 0 2 R5�5, q ¼ ½�1;�5;0;0;2�T, A ¼ 0 2 R1�5, b ¼ 0 2 R1,x� ¼ 0 2 R5, xþ ¼ ½4;5;1;2;3�T, and
J ¼1 0 1 2 0
1 2 �1 0 4
� �; d ¼
7
11
� �.
After assigning the values of W , q, J, d, A, b and x� into theSimulink model depicted in Fig. 6, the transient behavior andperformance of LVI-PDNN (5) could be simulated readily forsolving online the above LP problem.
�
The simulation result starting from zero initial state yð0Þ ¼ 0 2R8 is illustrated in Fig. 10. With g ¼ 10, state vector yðtÞ 2 R8 ofLVI-PDNN (5) converges to an equilibrium state y ¼½2;5;1;2;6:505� 10�9;9:736� 10�2;�1:097;0�T in 0.879 s,and its first five elements constitute numerically the optimalsolution x ¼ ½2;5;1;2;0�T to the above LP problem.
� The simulation result starting from random initial state yð0Þ 2½�5;5�5 is illustrated in Fig. 11. It shows that, started with aninitial state randomly selected within ½�5;5�5, the LVI-PDNN(5) always converges to this unique optimal solution x of suchan LP problem (denoted by * in red). � We observe from a large number of numerical tests as wellthat, with design parameter g ¼ 104, the average convergencetime for achieving the accuracy of 10�3 in this LP problemsolving is about 0:9308 ms. In addition, with exponential

ARTICLE IN PRESS
Fig. 10. Simulink ‘‘Scope’’ illustration of yðtÞ of LVI-PDNN (5) solving LP problem.
−50
510
−5
0
5
10−4
−2
0
2
4
6
x1
x2
x 3
−50
510
−5
0
5−5
0
5
x1
x4
x 5
Fig. 11. Spatial trajectories of xðtÞ synthesized by LVI-PDNN (5) starting randomly
and converging finally to x of LP (1)–(4). (a) ðx1; x2 ; x3Þ convergence and
(b) ðx1; x4 ; x5Þ convergence.
Y. Zhang et al. / Neurocomputing 72 (2009) 1679–16871686
convergence guaranteed, when design parameter g ¼ 107, theaverage convergence time for achieving the accuracy of 10�3 isabout 0:93ms.
The above two illustrative examples have substantiated theefficacy of LVI-PDNN (5) and its MATLAB Simulink modeling for
online solution of QP and LP problems in a unified manner.5. Conclusions
Robot motion planning and control have motivated the onlinesolution to general LP and QP problems [21]. In this paper, theLVI-based primal-dual neural network (LVI-PDNN) for such anonline solution has been presented. Its Simulink modeling andsimulative verification have been investigated as well. Instead ofconventional compilation of program code, the LVI-PDNN Simu-link model could be built up systematically and easily by usingbasic function blocks. Programming efforts are thus reduceddrastically. Two illustrative examples with a large number ofnumerical experiments have substantiated the efficacy of theLVI-PDNN and its Simulink modeling. In addition, this LVI-PDNNSimulink modeling appears to be an important and necessary stepto its FPGA and ASIC implementation, which could be done byusing Simulink HDL Coder as a future research direction.
Acknowledgments
Before joining Sun Yat-Sen University in 2006, the correspond-ing author, Yunong Zhang, had been with National University ofIreland at Maynooth, University of Strathclyde, National Univer-sity of Singapore, Chinese University of Hong Kong, since 1999.Continuing the line of this research, he has been supported bydifferent research fellowships/assistantship. This research isfunded by National Science Foundation of China under Grant60775050 and by the Science and Technology Office of SunYat-Sen University.
References
[1] D. Anguita, A. Boni, S. Ridella, A digital architecture for support vectormachines: theory, algorithm, and FPGA implementation, IEEE Trans. NeuralNetworks 14 (5) (2003) 993–1009.
[2] A. Cichocki, R. Unbehauen, Neural Networks for Optimization and SignalProcessing, Wiley, Chichester, 1993.
[3] A.A.H. El-Shafei, M.I. Sobhy, A time-multiplexing simulator for cellular neuralnetwork (CNN) using SIMULINK, in: Proceedings of the IEEE InternationalSymposium on Circuits and Systems, vol. 3, 1998, pp. 167–170.
[4] P. Ferreiraa, P. Ribeiroa, A. Antunesa, F.M. Dias, A high bit resolution FPGAimplementation of a FNN with a new algorithm for the activation function,Neurocomputing 71 (2007) 71–77.
[5] H. Hikawa, A digital hardware pulse-mode neuron with piecewise linearactivation function, IEEE Trans. Neural Networks 14 (5) (2003) 1028–1037.
[6] K. Iqbal, Y.C. Pai, Predicted region of stability for balance recovery: motion atthe knee joint can improve termination of forward movement, J. Biomech. 33(12) (2000) 1619–1627.
[7] M.P. Kennedy, L.O. Chua, Neural networks for nonlinear programming, IEEETrans. Circuits Syst. 35 (5) (1988) 554–562.
[8] J. Lazaro, J. Arias, A. Astarloa, U. Bidarte, A. Zuloaga, Hardware architecture fora general regression neural network coprocessor, Neurocomputing 71 (2007)78–87.
[9] C. Mead, Analog VLSI and Neural Systems, Addison-Wesley, Reading, 1989.[10] I.B. Pyne, Linear programming on an electronic analogue computer, Trans.
Am. Inst. Electrical Eng. 75 (1956) 139–143.[11] M.A. Shanblatt, A Simulink-to-FPGA implementation tool for enhanced design
flow, in: Proceedings of the IEEE International Conference on MicroelectronicSystems Education, 2005, pp. 89–90.
[12] W.S. Tang, J. Wang, A recurrent neural network for minimum infinity-normkinematic control of redundant manipulators with an improved problemformulation and reduced architecture complexity, IEEE Trans. Syst. ManCybernet. 31 (1) (2001) 98–105.
[13] D. Tank, J. Hopfield, Simple neural optimization networks: an A/D converter,signal decision circuit, and a linear programming circuit, IEEE Trans. CircuitsSyst. 33 (5) (1986) 533–541.
[14] The MathWorks Inc., Using Simulink, version 6.6, Natick, MA, 2007, availableat hhttp://www.mathworks.com/access/helpdesk/help/toolbox/simulinki.
[15] The MathWorks Inc., Simulink HDL Coder User’s Guide, version 1.1, Natick,MA, 2007, available at hhttp://www.mathworks.com/access/helpdesk/help/toolbox/slhdlcoderi.

ARTICLE IN PRESS
Y. Zhang et al. / Neurocomputing 72 (2009) 1679–1687 1687
[16] S. Zhang, A.G. Constantinides, Lagrange programming neural networks, IEEETrans. Circuits Syst. 39 (7) (1992) 441–452.
[17] Y. Zhang, On the LVI-based primal-dual neural network for solving onlinelinear and quadratic programming problems, in: Proceedings of the AmericanControl Conference, 2005, pp. 1351–1356.
[18] Y. Zhang, Inverse-free computation for infinity-norm torque minimization ofrobot manipulators, Mechatronics 16 (2006) 177–184.
[19] Y. Zhang, A set of nonlinear equations and inequalities arising in robotics andits online solution via a primal neural network, Neurocomputing 70 (2006)513–524.
[20] Y. Zhang, Towards piecewise-linear primal neural networks for optimizationand redundant robotics, in: Proceedings of IEEE International Conference onNetworking, Sensing and Control, 2006, pp. 374–379.
[21] Y. Zhang, S.S. Ge, T.H. Lee, A unified quadratic programming based dynamicalsystem approach to joint torque optimization of physically constrainedredundant manipulators, IEEE Trans. Syst. Man Cybernet. Part B 34 (5) (2004)2126–2133.
[22] Y. Zhang, W.E. Leithead, Exploiting Hessian matrix and trust-region algorithmin hyperparameters estimation of Gaussian process, Appl. Math. Comput. 171(2005) 1264–1281.
[23] Y. Zhang, J. Wang, A dual neural network for convex quadratic programmingsubject to linear equality and inequality constraints, Phys. Lett. A 298 (4)(2002) 271–278.
[24] Y. Zhang, J. Wang, Y. Xu, A dual neural network for bi-criteria kinematiccontrol of redundant manipulators, IEEE Trans. Robot. Autom. 18 (6) (2002)923–931.
Yunong Zhang is a professor at School of InformationScience and Technology, Sun Yat-Sen University (SYSU),China. He received B.S., M.S., and Ph.D. degrees,respectively, from Huazhong University of Scienceand Technology (HUST), South China University ofTechnology (SCUT), and Chinese University of HongKong (CUHK) respectively in 1996, 1999, and 2003.Before joining SYSU in 2006, Yunong Zhang had beenwith National University of Ireland (NUI), University ofStrathclyde, National University of Singapore (NUS)since 2003. His main research interests include neuralnetworks and robotics.
Weimu Ma received his B.S. degree from Departmentof Mathematics, Sun Yat-Sen University, China in July2006. He is now completing his M.S. degree at Schoolof Information Science and Technology, Sun Yat-SenUniversity. His current research interests includeneural networks, nonlinear systems, and machinelearning.
Xiao-Dong Li is an associate professor at School ofInformation Science and Technology, Sun Yat-SenUniversity, China. He received the B.S. degree fromDepartment of Mathematics, Shanxi Normal Univer-sity, China, in 1987, and the M.S. degree from EasternChina Institute of Technology, China, in 1990. Hereceived the Ph.D. degree from Department of Manu-facturing Engineering and Engineering Management,City University of Hong Kong, China, in 2006.
Hong-Zhou Tan is a professor at School of InformationScience and Technology, Sun Yat-Sen University, China.He received the Ph.D. degree jointly from CityUniversity of Hong Kong and South China Universityof Technology, China, in 1998. From 1999 to 2000, hewas a research fellow at School of Electrical andElectronic Engineering, Nanyang Technological Univer-sity, Singapore. From April 2000 to October 2000, hewas a post-doctoral research fellow at Department ofMechanical and Industrial Engineering, University ofManitoba, Winnipeg, MB, Canada. His research inter-ests are in the areas of control and communication
systems, including system identification and faultdiagnosis.Ke Chen received his B.S. degree from School ofInformation Science and Technology, Sun Yat-SenUniversity, China in 2007. He is now pursuing hisM.E. degree at School of Software, Sun Yat-SenUniversity. His current research interests includeneural networks, robotics, nonlinear systems, andsoftware design.