Strategic Pressure Measurement System Characterization of the Mars Entry Atmospheric Data System

Mars Entry Atmospheric Data System Modelling and
Algorithm Development
Christopher D. Karlgaard∗, Roger E. Beck†, Stephen A. O’Keefe‡,Paul M. Siemers, III§, Brady A. White¶
Analytical Mechanics Associates, Inc.
Walter C. Engelund‖, and Michelle M. Munk∗∗
NASA Langley Research Center
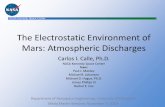
The Mars Entry Atmospheric Data System (MEADS) is being developed as part of theMars Science Laboratory (MSL), Entry, Descent, and Landing Instrumentation (MEDLI)project. The MEADS project involves installing an array of seven pressure transducerslinked to ports on the MSL forebody to record the surface pressure distribution duringatmospheric entry. These measured surface pressures are used to generate estimates ofatmospheric quantities based on modeled surface pressure distributions. In particular, thequantities to be estimated from the MEADS pressure measurements include the total pres-sure, dynamic pressure, Mach number, angle of attack, and angle of sideslip. Secondaryobjectives are to estimate atmospheric winds by coupling the pressure measurements withthe on-board Inertial Measurement Unit (IMU) data. This paper provides details of thealgorithm development, MEADS system performance based on calibration, and uncer-tainty analysis for the aerodynamic and atmospheric quantities of interest. The workpresented here is part of the MEDLI performance pre-flight validation and will culminatewith processing flight data after Mars entry in 2012.
I. Introduction
The Mars Entry, Descent, and Landing Instrumentation (MEDLI) system is an array of sensors installedin the heat shield of the Mars Science Laboratory (MSL) entry vehicle. The goals of this project are tomeasure the aerodynamic and aerothermal environment during atmospheric entry.1 The MEDLI systemconsists of three basic subsystems: The Mars Integrated Sensor Plug (MISP), the Mars Entry AtmosphericData System (MEADS), and the Sensor Support Electronics (SSE). The MISP system uses 7 sensor plugsinstalled in the heat shield, each plug consisting of 1 recession sensor and 4 thermocouple sensors, to measurethe aerothermal environment during entry. MEADS makes use of 7 flush pressure measurements on theaeroshell fore-body to allow estimation of atmospheric state parameters, and when combined with externalvelocity measurements, atmospheric parameters such as density and winds. The SSE is an electronics boxthat provides the signal conditioning and data acquisition systems for MISP and MEADS. This paper isfocused on the development of models and algorithms in support of MEADS system design and, eventually,flight data processing. Details on the MEADS subsystem requirements and design are provided in Ref. 2.Information on other MEDLI instruments can be found in Ref. 1.
The basic MEADS science objectives are to reconstruct atmospheric data variables from pressure mea-surements alone when the freestream dynamic pressure is above 850 Pa. In particular, the objectives areto estimate the angles of attack and sideslip to within 0.5 deg, the dynamic pressure to within 2%, andthe Mach number to within 0.1, in a 3σ sense. These accuracy goals are based largely on flight experience
∗Senior Project Engineer, Analytical Mechanics Associates, Inc, Hampton, VA, AIAA Senior Member†Senior Project Engineer, Analytical Mechanics Associates, Inc, Huntsville, AL, AIAA Member.‡Project Engineer, Analytical Mechanics Associates, Inc, Hampton VA§Consultant¶Project Engineer, Analytical Mechanics Associates, Inc., Hampton VA, AIAA Member‖Head, Atmospheric Flight and Entry Systems Branch, AIAA Associate Fellow∗∗MEADS System Lead, Atmospheric Flight and Entry Systems Branch, AIAA Senior Member
1 of 21
American Institute of Aeronautics and Astronautics

0 50 100 150 200 2500
5
10
15
20
25
30
35
Mac
h
Time Since Entry Interface [sec]
(a) Mach
0 50 100 150 200 2500
5
10
15
Dyn
amic
Pre
ssu
re [
kPa]
Time Since Entry Interface [sec]
(b) Dynamic Pressure
0 50 100 150 200 250−30
−25
−20
−15
−10
−5
0
5
10
Ang
le [d
eg]
Time Since Entry Interface [sec]
Angle of AttackAngle of SideslipFlight Path Angle
(c) Aerodynamic and Trajectory Angles
0 50 100 150 200 2500
1
2
3
4
5
6
Den
sity
[g
/m3 ]
Time Since Entry Interface [sec]
(d) Density
Figure 1. MSL Reference Trajectory
with the Shuttle Entry Air Data System (SEADS).3–5 Secondary objectives are to estimate the freestreamdensity and atmospheric winds from the MEADS pressure measurements, when combined with the on-boardInertial Measurement Unit (IMU) data. These measurements will aid the MSL trajectory reconstructionand performance analysis, and will separate the aerodynamic and atmospheric uncertainties.
Seven pressure ports are proposed for the MSL geometry as shown in Fig. 2(a), labelled as ports P1through P7(MISP locations are shown as T1 through T7). As seen above, the angle of attack remains near20 deg. over much of the trajectory. At these conditions the stagnation region is along the windward partof the cone and a recompression and potential for turbulent flow is predicted along the leeward side. Tominimize the uncertainties in pressure measurements the proposed port layout avoids placing ports in thelatter region.
Pressure ports P1 and P2 are located in the stagnation region to provide a nearly direct measurement ofthe total pressure at the high Mach regime. Ports P3, P4, and P5 lie on the spherical cap and are placed inorder to take advantage of the simple geometry for angle of attack measurements. Additionally, P4, locatedat the geometric center, provides a nearly direct total pressure measurement at the low Mach regime prior toparachute deployment. The final two ports are located in the horizontal plane of symmetry, approximately1.0 meters off of the centerline. The ports, P6 and P7, provide the off-axis measurements needed to estimatethe angle of sideslip. The pressure ports are connected to pressure transducers via a tube system illustratedin Fig. 2(b). The measured pressures are sampled at a rate of 8 Hz from entry interface until heat shieldseparation.
2 of 21
American Institute of Aeronautics and Astronautics

(a) MEADS Port Geometry (b) MEADS Tube Configuration
Figure 2. MEADS Geometry and Tube Configuration
The remainder of the paper is organized as follows. Section II discusses the basic surface pressuredistribution modelling. Section III discusses atmospheric data estimator design using least–squares andKalman filtering techniques. Section IV provides a summary of error models, trade studies, and systemperformance analysis. Current status and future work plans are outlined in Sec. V.
II. Pressure Models
A. Newtonian Flow Model
In the traditional implementations of FADS-based air data estimation, the surface pressures are modelledusing Newtonian flow approximations in which the surface pressure is a function of the port location, angleof attack, angle of sideslip, and Mach number. Explicitly, the surface pressure at port i is given by3
pi = pt
[(1−R) cos2 θi + R
](1)
where pt is the total pressure, R is ratio of static pressure to total pressure, and θi is the incidence angle.The pressure ratio is a function of the Mach number, which takes the form3
R =p∞pt
=
[2
(γ+1)M2∞
]γ/(γ−1)
·[
2γM2∞−(γ−1)γ+1
]1/(γ−1)
for M∞ > 1
[1 + γ−1
2 M2∞
]−γ/(γ−1)for M∞ ≤ 1
(2)
The pressure ratio is shown as a function of Mach number for γ = 1.335 in Fig. 3(a).The incidence angle is a function of the port location and angles of attack and sideslip, given by
cos θi = cos α cos β cosλi + sin β sin φi sin λi + sin α cos β cosφi sin λi (3)
where λi is the cone angle and φi is the clock angle of the orifice.Substituting Eqs. (2–3) into Eq. (1) yields a relationship for surface pressure as a function of the port
location, total pressure, Mach number, and angles of attack and sideslip. The Newtonian flow pressure modelcan also be written as a function of the freestream dynamic pressure by making use of the relationship3
q∞ =(γ
2
)ptRM2
∞ (4)
3 of 21
American Institute of Aeronautics and Astronautics

0 5 10 15 20 25 300
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Mach
Pre
ssu
re R
atio
(a) Pressure Ratio R
0 5 10 15 20 25 300
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Mach
RM
∞2
(b) Quantity RM2∞
Figure 3. Pressure Ratio vs. Mach for γ = 1.335
05101520250
5
10
15
20
25
Mach
To
tal A
ng
le o
f A
ttac
k [d
eg]
Nominal TrajectoryCFD Grid Points
(a) MEADS CFD Grid
0 50 100 150 200 2500
5
10
15
20
25
30
Time Since Entry Interface [sec]
Po
rt P
ress
ure
[kP
a]
Port 1Port 2Port 3Port 4Port 5Port 6Port 7q
∞=850 Pa Thresholds
(b) MEADS Port Pressures
Figure 4. MEADS CFD Grid and Port Pressure
As noted in Ref. 3, 4, for small R (or, equivalently, high Mach) the product RM2∞ is nearly constant.
This trend is illustrated in Fig. 3(b) for γ = 1.335. The implications of this trend are twofold. First,any slight change in static pressure has a large impact on the Mach number, which implies that the Machnumber is difficult to estimate for low pressure ratios. Secondly, it implies that the dynamic pressure canbe computed accurately directly from the total pressure by substituting the limiting value of the quantityRM2
∞. Therefore, errors in static pressure or Mach number do not contribute to errors in dynamic pressureestimates in the high hypersonic regime.
B. CFD-Based Model
A CFD-based table lookup model was developed for analysis of the MSL air data system. This CFDdatabase is based on supersonic and hypersonic regime pressure distributions from thin–layer Navier–Stokessolutions generated using the Langley Aerothermal Upwind Relaxation Algorithm (LAURA). The relaxationof vibrational temperature of the CO2 molecule is simulated using the CAMAC model. Forebody solutionswere obtained using a 7 block singularity-free grid.
The supplied CFD database was converted from absolute pressure to pressure coefficient in order toallow the pressure distribution to scale with different trajectories and to enable estimation of freestream
4 of 21
American Institute of Aeronautics and Astronautics

atmospheric properties such as the static pressure. The data was re–interpolated from the 7 block grid toa single-zone grid of clock and cone angles. This alteration simplifies the interpolation of surface conditionswithout complications of search routines required to handle multiple zones.
The CFD grid points are shown as a function of total angle of attack and Mach number in Fig. 4(a) alongwith the nominal reference trajectory. The pressure profiles for each MEADS port are shown in Fig. 4(b).Note that each CFD grid point consists of a full surface pressure distribution solution, with 37 clock anglesin uniform 5 deg increments and 61 cone angles with non-uniform increments. These grid points can beinterpolated using linear or cubic spline techniques. The linear interpolation is significantly faster and istherefore suitable for Monte–Carlo analysis. Cubic interpolation is suitable for analyzing specific simulationcases or flight data.
III. Atmospheric Data Estimation
The basic MEADS atmospheric state estimation procedure is essentially similar to the SEADS stateestimation described in Ref. 3, a point–wise least squares fit of the surface pressure measurements to themodelled pressure distribution to determine minimum–variance estimates of the atmospheric states. Whencombined with an Inertial Measurement Unit (IMU), the MEADS measurements can also be used to generatewind and density estimates. This section describes the techniques used to estimate these quantities, beginningwith the basic MEADS estimation technique to compute the atmospheric state variables.
A. Least–Squares State Variable Estimation
By defining the atmospheric state vector as x, p as the vector of N observed surface pressures, and thepressure model as h(x, t) then the pressure measurement model can be written compactly as
p = h (x, tk) + ε (5)
where ε is the vector of pressure measurement errors and tk is the measurement sampling time. The pressuremeasurement model can be approximated by means of the truncated series expansion
p ≈ h (x, tk) + H(tk) (x− x) + ε (6)
where x is some reference state and H(tk) is the Jacobian matrix
H(tk) =[∂h∂x
]
x=x
(7)
The problem can be reduced to that of a linear regression problem
y = Hx + ε (8)
where y = p − h (x, tk) + Hx. By virtue of the Gauss–Markov theorem, the best linear unbiased estimateof x is the weighted least-squares solution,6
x =(HT R−1H
)−1HT R−1y (9)
where R is the pressure measurement error covariance matrix. Since the original relationship between thestates and the measurement in Eq. (5) is nonlinear, the estimation scheme can be iterated until convergenceby successively replacing x by x, using the converged state estimate from the previous sampling time (tk−1)as the initial reference state x. The state estimate error covariance matrix P can then be computed from
P =(HT R−1H
)−1(10)
Note that the aerodynamic state vector formulation is not unique. In particular, any two variables fromthe set of p∞, pt, q∞, R, and M∞ can be used in the estimator in addition to α and β. The remainingstate variables not used directly in the estimator can be calculated as parameters, having first estimatedthe aerodynamic state variables. Note that the SEADS algorithm3 made use of p∞ and pt in the estimatorformulation.
Due to the asymptotic behavior of the pressure ratio as a function of Mach described in the previoussection, some numerical difficulties can arise for high Mach number conditions. For high–Mach cases it may
5 of 21
American Institute of Aeronautics and Astronautics

be advantageous to consider a special case of estimators that use a fixed pressure ratio R and form stateestimates using only three aerodynamic variables, e.g. pt, α, and β, with dynamic pressure computed directlyfrom pt assuming the limiting value of the quantity RM2
∞. These estimators are generally more consistent butbecome biased as the true pressure ratio drifts away from the assumed value. If the vehicle is instrumentedwith an Inertial Measurement Unit (IMU) then it is also possible to schedule the assumed pressure ratio asa function of the inertial Mach number to reduce the growth of the bias over time. Alternately, the bias canbe calibrated and subtracted out using preflight simulation cases.
The least–squares solution described in this section has several important properties. First, all pressuremeasurements are processed simultaneously to determine the atmospheric state variable estimate, opposed tothe so-called “triples” algorithms, which use only a subset of available ports to determine the state variableestimates individually in sequence. Using all measurements simultaneously is advantageous in the sense thatevery port contributes to the state estimate rather than a restricted set, which generally leads to betterperformance,8 and is also fault tolerant in the sense that a failed port can simply be removed from thesolution that would otherwise ruin a triples algorithm.
1. Wind Estimation
Wind estimation is enabled by combining the MEADS algorithm outputs with velocity and attitude outputsderived from the IMU. One approach is to relate the angle of attack and sideslip estimates to the planet rel-ative velocity and the horizontal wind components and solve directly for the winds using Newton’s method.9
To this end, the aerodynamic angles can be expressed as
tan α =wb
ub(11)
tan β =vb√
u2b + v2
b
(12)
where ub, vb and wb are the body-axis wind-relative velocities, which are in turn functions of the windvelocity and the planet-relative trajectory given by
ub
vb
wb
= G (Ψ, Θ,Φ)
ug − uw
vg − vw
wg − ww
(13)
where Ψ, Θ, and Φ are the yaw-pitch-roll Euler angles relating the tangent frame to the body frame and Gis the matrix of the transformation, ug, vg and wg are the planet relative North-East-Down velocities, anduw, vw, and ww are the wind components.
At each air data measurement point occurring at time tk with aerodynamic angle estimates given by αand β, the wind velocities may be solved for by the iterative method (neglecting the downward wind)
uw
vw
j+1
=
uw
vw
j
+ Γ−1
α− α
(uwj , vwj
)
β − β(uwj , vwj
)
(14)
where j is an iteration index, and
Γ =
∂α∂uw
∂α∂vw
∂β∂uw
∂β∂vw
(uw=uwj,vw=vwj )
(15)
The wind estimate error covariance matrix, Pw, follows from the measurement error covariance matrix,P, and from the planet-relative trajectory error covariance matrix, Q, by means of the equation
Pw = Γ−1P(Γ−1
)T+ ΛQΛT (16)
where
Λ =
∂uw
∂ug
∂uw
∂vg
∂uw
∂wg
∂uw
∂ψ∂uw
∂θ∂uw
∂φ
∂vw
∂ug
∂vw
∂vg
∂vw
∂wg
∂vw
∂ψ∂vw
∂θ∂vw
∂φ
(17)
6 of 21
American Institute of Aeronautics and Astronautics

This method suffers from singularities in the matrix Γ when the flight path angle is zero.9 This singularcondition is problematic for the MEADS application since the MSL entry trajectory crosses zero flight pathangle on two occasions, shown in Fig. 1(c).
2. Density Estimation
The freestream atmospheric density at time tk follows the determination of the dynamic pressure and thewind–relative velocities from
ρ∞ =2q∞
(u2b + v2
b + w2b )
(18)
B. Kalman Filter Formulation
The Kalman filter technique can be used to blend the MEADS and IMU measurements together in a tightly–coupled fashion, in order to compute the winds and atmospheric state variables directly from the MEADSmeasured surface pressures and integrated IMU accelerations and angular rates. The approach is to recastthe pressure model to be written as a function of the freestream atmospheric quantities (pressure, density,and tangential winds) along with the planet–relative vehicle velocity and orientation. After computing thesetransformed states, the aerodynamic orientation angles, Mach number, and dynamic pressure are calculatedas output parameters. A tightly–coupled solution of this nature has not been implemented before for entryvehicle trajectory reconstruction, though a conceptually similar philosophy has been proposed for real-timeair data processing for aircraft applications in Ref. 10.
The proposed blended data processing technique for MEADS/IMU is modification to the ExtendedKalman Filter (EKF) approach implemented in a trajectory reconstruction code known as NewSTEP.This code is a generalization of the Statistical Trajectory Estimation Program (STEP)11–13 developed byNASA/LaRC and used extensively in the 1960s-1980s on a wide variety of launch vehicle and entry vehicleflight projects, including the X-23A/SV-5D PRIME,14 Viking,15–17 Pioneer Venus,18 the Space Shuttle19,20
and Titan IIIC.21 The NewSTEP code borrows heavily from the STEP formulation, but includes severalenhancements to the algorithms and implementation. In particular, NewSTEP is coded entirely in Matlabin order to make use of built-in capabilities such as numerical integration routines. The NewSTEP code hasbeen applied to several projects including the Hyper-X Mach 7 and Mach 10 flights22 and the Mars Explo-ration Rover (MER) mission. In addition to the MSL/MEDLI flight data processing, the code is planned tobe used in support of the Inflatable Reentry Vehicle Experiment (IRVE and IRVE-II),23 the Orion LaunchAbort Flight Tests (PA-1), and the Ares I-X flight test.24
The NewSTEP code is designed to combine vehicle inertial data and external data sources over the entiretime history in order to generate a state trajectory estimate and associated uncertainty estimates. Thenonlinear filter dynamics are driven by acceleration and angular rate measurements from the on-board IMU.The NewSTEP code has been generalized for the MEADS data processing to incorporate tightly coupledpressure measurements to be included in the Kalman filter formulation. To do so, atmospheric state variablesare included in the filter formulation such that the filter estimates the freestream atmospheric conditions(pressure, density, and winds) directly from the MEADS pressure measurements when combined with IMUdata at each measurement update step. An iterative update has been added to NewSTEP in order to bettercapture the nonlinear relationship between the state variables and the measured pressures. Additionally,the option to include pressure transducer scale factor errors as “solve-for” parameters has been incorporatedinto the implementation.
The basic premise behind the proposed inertially blended atmospheric data filter is to reformulatethe measured pressure model into one that directly incorporates planet–relative states and freestream at-mospheric conditions. For example, in Newtonian flow theory the surface pressure distribution is usuallywritten as a function of the angle of attack, angle of sideslip, dynamic (or total) pressure, and static pressureor the pressure ratio, e.g. Eq. (1). By substituting the relations Eqs. (11) and (12) and the relation forMach number as the ratio of wind-relative velocity to the speed of sound, the surface pressure distributioncan be written as a function of the planet–relative trajectory and freestream atmospheric conditions. Thisreformulation allows for a tight coupling between the IMU and the atmospheric data system in order toestimate the trajectory and atmosphere simultaneously.
The filter state variables used in this formulation are
x =[
r θ φ u v w e0 e1 e2 e3 uw vw ww p∞ ρ∞]T
(19)
7 of 21
American Institute of Aeronautics and Astronautics

where r is the radius of the vehicle from the center of the planet, θ is the longitude, φ is the declination,u, v, w are the inertial velocity components in a local-radial coordinate frame, ei are the Euler parametersdescribing the attitude of the vehicle with respect to the local-vertical frame, uw, vw and ww are the windcomponents in the local-vertical frame, and p∞ and ρ∞ are the freestream pressure and density, respectively.
The state dynamics are modelled with the nonlinear system of differential equations given by22
r = −w (20)
φ =u
r(21)
θ =v
r cosφ− Ω (22)
u = au +1r
(uw − v2 tan φ
)−(
3µJ2
2r4
)sin (2φ) (23)
v = av +1r
(uv tan φ + vw) (24)
w = aw − 1r
(u2 + v2
)+
µ
r2−
(3µJ2
2r4
) (2− 3 cos2 φ
)(25)
e0
e1
e2
e3
=12
−e1 −e2 −e3
e0 −e3 e2
e3 e0 −e1
−e2 e1 e0
ωx
ωy
ωz
− 1
rG
v
−u
−v tanφ
(26)
p∞ =ρ∞w
r2(27)
ρ∞ =ρ2∞w
r2p∞(28)
uw = 0 (29)vw = 0 (30)ww = 0 (31)
where µ is the gravitational parameter of the planet, J2 is the oblateness coefficient of the gravity field, andΩ is the angular rate of the planet. The matrix G is the transformation from the local-tangent frame tothe body frame. The quantities ωx, ωy and ωz are the body-axis sensed angular rates, and au, av and aw
are body center of mass accelerations in the local frame, which are related to the sensed accelerations at theIMU location in the body frame via the equation,
au
av
aw
= Gr
ax
ay
az
−
− (
ω2y + ω2
z
)(ωxωy − ωz) (ωxωz + ωy)
(ωxωy + ωz) − (ω2
x + ω2z
)(ωyωz − ωx)
(ωxωz − ωy) (ωyωz + ωx) − (ω2
x + ω2y
)
xm
ym
zm
(32)
where ax, ay, and az are the sensed accelerations at the IMU location and xm, ym, and zm are the IMUposition coordinates in the body frame. Transducer scale factor errors can be included in the filter formulationusing differential equations of the form λi = 0 where λi is the scale factor error of the ith transducer.
Additive process noise terms are included on the acceleration and angular rate measurements to accountfor sensor errors. Process noise terms are also included on the atmospheric winds, pressure, and density toaccount for model uncertainties.
Let the quantities xk−1 and Pk−1 be the state estimate and state estimate error covariance at time steptk−1, respectively, and let xk and Pk be the predicted state and state error covariance at time tk. TheMEADS pressure measurement pk at time tk is processed according to7
xk,i+1 = xk + Kk,i [pk − h (xk,i, tk)−Hk,i · (xk − xk,i)] (33)
where i denotes the iteration index, h (x, t) is the predicted pressure measurement based on the surfacepressure model and H is its linearization about the current state estimate. The quantity Kk,i is the Kalmangain matrix,
Kk,i = PkHTk,i
[Hk,iPkHT
k,i + Rk
]−1(34)
8 of 21
American Institute of Aeronautics and Astronautics

The filter equations above are iterated until convergence (or until reaching a prescribed upper limit onthe number of iterations), leading to the final state estimate following the pressure measurement update.The estimated state covariance is then provided by
Pk = [I−KkHk] Pk (35)
where Kk and Hk are computed using the converged state estimate.The state predictions from one measurement point to the next are computed using numerical integration
of the nonlinear dynamic model in Eqs. (20–31). The covariance predictions are propagated according tothe matrix differential equation
˙P(t) = Fx(x(t), t)P(t) + P(t)T Fx(x(t), t)T + Fu(x(t), t)Q(t)Fu(x(t), t)T (36)
P (tk−1) = Pk−1 (37)
where Fx and Fu are the linearizations of the system dynamics with respect to the states and process noiseterms, respectively, and Q is the process noise covariance matrix.
IV. System Performance
The impact of individual error sources and the effects of selected failure modes are examined in thissection. These error sources include port location knowledge, sensor noise and quantization, telemetry timestamp errors, pneumatic lag, thermal transpiration, and system calibration uncertainties. The associatederror models are reviewed in the following sections before showing sensitivity simulation results. The CFDpressure distributions uncertainties are not considered in this work.
A. Error Models
1. Port Location Knowledge Error
Errors in the knowledge of the port location after installation are cast as random longitudinal perturbationsat constant clock angle and a random tangential perturbation at constant cone angle. The errors are specifiedas uncorrelated zero-mean Gaussian random numbers. The measurement system is accurate to within 0.05inches in a 3σ sense.
2. Noise and Quantization
Sensor noise is modeled using the equation
Pi = Pi + (Pmax − Pmin) ηp (38)
where Pi is the transducer output, and Pmax and Pmin are the maximum and minimum pressure range ofthe sensor system, respectively. The variable ηp is a uniform random variable between ±N/2n where N isthe number of counts of noise and n is the system effective bit size.
Sensor quantization can be modelled using the equation
Pi =(
Pmax − Pmin
2n
)Int
[(Pi
Pmax − Pmin
)2n
](39)
Finally, sensor saturation can be modeled as Pi = max[min
(Pi, Pmin
), Pmax
].
3. Timing Error
Relative errors in the telemetry time stamp between measurements at different port locations introduces adistortion effect that corrupts the pressures used as input to the basic data reduction algorithm. Timingerrors include both random and systematic components. The systematic timing errors can the adjusted inpre-processing of the flight data, leaving only the random error to be considered in error budgeting. Theseerrors are simulated by first casting a uniform random number for each port in the range of ±25µs, and thenshifting the truth state used to calculate the measured surface pressures.
9 of 21
American Institute of Aeronautics and Astronautics

4. Pneumatic Lag
The MEADS system response model, or lag model, captures the dynamics of the pressure measurementfrom the surface port location to the pressure transducer (the sensor). In general, these characteristics are afunction of the line properties (tube diameter and length), fluid properties (density, dynamic viscosity, etc.),as well as flight conditions (pressure and temperature at the port and temperature at the transducer). Thesystem response models are used to accomplish two objectives: firstly, to accurately model the response sothat pre-flight simulation can be used to assess hardware, algorithms, and telemetry rates, and secondly, tocharacterize the system response so that measured pressures can be corrected to actual surface pressures foruse in generating atmospheric data estimates.
High–fidelity response models based on the Navier–Stokes equations are available in the literature, inparticular the infinite–order frequency–domain Bergh–Tijdeman response model25 and variations on thismodel for branched systems developed by Whitmore.26 In these models, the pneumatic system is broken upinto a series of segments, each with constant line and fluid properties. The end to end frequency response fromport to transducer becomes the product of the individual response functions for each segment. Entrappedvolume in any of the segments can also be captured. In this manner changes in tubing diameter as wellas temperature gradients can be explicitly modelled. The response is evaluated across a range of inputfrequencies and the result is a complex frequency response that can be represented as magnitude and phase.
The frequency domain results for each flight condition are not readily suited either for time domainsimulation or for direct analysis of time histories of measured pressure. For these purposes, a low–orderresponse model must be utilized. For simple 2nd order systems, this response can be characterized by anatural frequency and damping, with transfer functions of the form
PL
P0=
ω2n
s2 + 2ζωn + ω2n
(40)
where P0 is the applied pressure, PL is the lagged pressure, and ζ and ωn are the damping ratio and naturalfrequency, respectively, and s is the Laplace variable.
A variety of 2nd order models based on simplified fluid mechanics relations are available in the literaturewith varying assumptions and classifications.27 A new 2nd order response model based on first principles ispresented in Ref. 27. This model is derived directly from the Bergh–Tijdeman equations using order reductiontechniques and was found to be more accurate than other 2nd order models. The natural frequency anddamping coefficients of this model are
ω2n =
Acc2/LV
(LAc/2V )[1 + (1/12) (γLRd)
2/ (cρ0)
2]
+ 1 + (1/6) (γLRd)2/ (cρ0)
2(41)
ζ =ωn
2
(γRd
ρ0
) [V L
Acc2+
12
(L
c
)2]
(42)
where L is the tube length, Ac is the cross-sectional area, V is the transducer entrapped volume, ρ0 is thefluid density in the tube, c is the speed of sound, and γ is the ratio of specific heats. The parameter Rd
is known as the acoustic impedance and can be calculated as a function of Reynold’s number to capturelaminar, transitional, or turbulent flow conditions, as described in Ref. 27.
Another approach to time domain analysis is look for a low-order system that matches the model response.This assumed form of this equivalent system is chosen to capture the modelled dynamics and to facilitateefficient simulation. Numerical optimization techniques have been utilized to fit transfer function modelsto the high-fidelity frequency response model, including up to 4th order systems with pure time delay.Preliminary results of this approach have been documented in Refs. 28 and 29 but will not be discussed inthis paper.
5. Thermal Transpiration
Under rarefied flow conditions, transpiration induced effects within a tubing system can cause the pressuremeasured by the transducers to be significantly different from the surface pressure. The effects can be dividedinto those caused by temperature gradients between the transducer and the surface, and those caused byheat transfer and/or shear stress.
A study of the available literature yielded three models to account for transpiration effects; two models forsimulating the difference between measured and orifice pressure due to thermomolecular flow effects and one
10 of 21
American Institute of Aeronautics and Astronautics

model for simulating the difference between the surface and orifice pressure due to shear stress and/or heattransfer. The first transpiration model is provided in Ref. 30, which is an application of thermomolecularflow theory developed by Knudsen in Ref. 32. Knudsen’s general formula for the thermomolecular pressureeffect is
dP
dT=
1(1 + a′r/λ)2
P
2T, where a′ = a1
1 + a2r/λ
1 + a3r/λ(43)
where r is a physical length scale, λ is the mean free path, P is the pressure, T is the temperature, and a1, a2,and a3 are empirical constants. The empirical constants have been obtained by Knudsen, using least–squaresfit to data acquired with hydrogen in glass tubes.32 The results are a1 = 2.46, a2 = 3.15, and a3 = 24.6.
Assuming that the temperature in the tubing between the surface and the transducer in known as afunction of length x, Eq. (43) can be written as
∂P (x)∂x
=P (x)2T (x)
[∂T (x)
∂x
] [κ (P, T, D)2 + a1κ (P, T,D)
κ (P, T,R)2 + (a1 + a2) κ (P, T, D) + a2a3
]2
(44)
where the parameter κ is the Knudsen number, given by
κ =µ
DP
√πRgT
2(45)
where Rg is the specific gas constant. The viscosity µ can be calculated as a function of temperature usingSutherland’s relation33
µ = µ0
(T0 + C
T + C
)(T
T0
)3/2
(46)
The constants associated with carbon dioxide are summarized in Table 1.
Table 1. Gas Constants for Carbon Dioxide
Constant ValueRg, J/kg-K 191.8µ0, Pa-s 14.8·10−6
T0, K 293.15C, K 240.0
The second transpiration model is based on an algorithm described by Potter.34 This model is basedon the theoretical formulation of Ref. 35 and empirical data obtained in Ref. 36. The empirical data wereobtained in a sequence of experiments involving a wide range of tube lengths, diameters, orifice shapes, andgases, including hydrogen, helium, nitrogen, and argon. The model is
∂P (x)∂x
=P (x)2T (x)
[∂T (x)
∂x
] [1 +
b1
κ (P, T, D)+
b2
κ (P, T,D) + b3/κ (P, T, D)
]−2
(47)
where b1 = 0.275, b2 = 0.625, and b3 = 24.0.Note that both the Knudsen and Potter transpiration models predict that (∂P/∂x) → 0 as κ → 0.The last model investigated for this paper is an augmentation of the Potter model34 that includes non–
equilibrium effects due to heat transfer and shear stress. This model is described in Ref. 37. The solutionrelies on empirical fits to data obtained in a wide range of experiments. The algorithm for calculatingnon–equilibrium effects is complicated and is not repeated here.
6. System Calibration and Temperature Uncertainty
A calibration of the MEADS flight system was conducted in order to compute pressure as a function of Voltageand sensor/electronics temperature. The MEADS calibration program carried two independent calibrationefforts. The baseline approach involved the industry standard or “traditional” method, successfully employedon SEADS38–40 and Aeroassist Flight Experiment (AFE)41 programs. The second approach is a proof-of-concept experiment using a Design of Experiments (DOE) method, which has never been used to calibrate
11 of 21
American Institute of Aeronautics and Astronautics

(a) a0 Coefficient (b) a0 Uncertainty
Figure 5. Calibration Database Example
space flight transducers prior to MEADS. The DOE approach is documented in Ref. 42 and is not discussedfurther in this paper.
The traditional calibration method uses a least–squares fit for each transducer to a model of the form
p = a0 (T1, T2) + a1 (T1, T2)V + a2 (T1, T2)V 2 (48)
where T1 is the pressure head temperature, T2 is the SSE electronics temperature, V is the Voltage outputfrom the transducer, and p is the pressure. The coefficients a0, a1, and a2 are termed the bias, sensitivity, andnonlinearity, respectively. These coefficients are determined from a least–squares fit of pressure vs. Voltageat specific temperature set points using a simple increasing/decreasing applied pressure to create the voltageresponse. By varying the temperature set points, a database of calibration coefficients can be constructed,and an empirical model developed that uses spline interpolation to look up values of these coefficients asfunctions of the two temperatures.
Along with the values of the calibration coefficient, the uncertainties in the coefficients are also storedas a function of the two temperatures. These uncertainties can be used to build a calibration error modelto assess system performance. The uncertainty analysis must also consider the effects of the in–flight zero,in which the bias is effectively removed from the model by taking a measurement in space shortly beforeatmospheric entry. A small residual bias error remains due to the slope of the bias curve as a function oftemperature, coupled with temperature uncertainty and noise.
Let T ?1 and T ?
2 be the transducer and SSE temperatures and V ? be the measured voltage at the time ofthe in–flight zero prior to atmospheric entry. Then the pressure error is
δp = a0 (T ?1 , T ?
2 ) + a1 (T ?1 , T ?
2 )V ? + a2 (T ?1 , T ?
2 ) (V ?)2 (49)
Then the adjusted pressure is given by p = p− δp. Following this correction, the estimated pressure is resetto read zero output at zero applied pressure. However, residual bias error remains due to the gradient ofthe a0 coefficient in the presence of temperature uncertainty. The in–flight zero does nothing to aid theknowledge of the transducer sensitivity and nonlinearity.
Let the measured transducer temperature be given by T1 = T1+b1+n1 where T1 is the true temperature,b1 is the bias error, and n1 is a noise component. Similarly let the measured SSE temperature be given byT2 = T2 +b2 +n2. The uncertainty in the estimated pressure due to calibration uncertainty and temperatureuncertainty can be derived by first expanding the equation for the adjusted pressure measurement as
p = a0
(T1, T2
)+ a1
(T1, T2
)V + a2
(T1, T2
)V 2 − a0
(T ?
1 , T ?2
)− a1
(T ?
1 , T ?2
)V ? − a2
(T ?
1 , T ?2
)(V ?)2 (50)
For purposes of uncertainty analysis, the Voltage V ? can be assumed to be zero. Thermal analysis ofthe MSL vehicle has shown a nearly constant temperature from the time of the in–flight zero throughoutthe atmospheric entry, though the initial temperature can vary widely.42 Therefore the temperatures at the
12 of 21
American Institute of Aeronautics and Astronautics

51015200
0.5
1
1.5
2
2.5
Mach [q∞ > 850 Pa]
α 3σ
Un
cert
ain
ty [
deg
]
5.0% Error2.5% Error1.0% Error0.5% Error
(a) Angle of Attack
51015200
0.5
1
1.5
2
2.5
3
Mach [q∞ > 850 Pa]
β 3σ
Un
cert
ain
ty [
deg
]
5.0% Error2.5% Error1.0% Error0.5% Error
(b) Angle of Sideslip
51015200
1
2
3
4
5
6
Mach [q∞ > 850 Pa]
q 3
σ U
nce
rtai
nty
[%
]
5.0% Error2.5% Error1.0% Error0.5% Error
(c) Dynamic Pressure
Figure 6. Total System Performance Trade Study
in–flight zero condition can be written as T ?1 = T1 + b1 + n?
1 and T ?2 = T2 + b2 + n?
2, where n?1 and n?
2 arethe noise samples at the in–flight zero. Substituting these expressions into Eq.(50) and linearizing for smalltemperature errors leads to an expression for the pressure calibration error of the form
σ2p = 2σ2
n
[(∂a0
∂T1
)2
+(
∂a0
∂T2
)2]
+
[σ2
a1+
(∂a1
∂T1
)2 (σ2
n + σ2b
)+
(∂a1
∂T2
)2 (σ2
n + σ2b
)]
V 2
+
[σ2
a2+
(∂a2
∂T1
)2 (σ2
n + σ2b
)+
(∂a2
∂T2
)2 (σ2
n + σ2b
)]
V 4 (51)
where σn, σb, σa1 and σa2 are the thermocouple noise, thermocouple bias, slope, and nonlinearity standarddeviations, respectively. Note that the bias uncertainty is removed through the in-flight zero, however aresidual bias error remains due to the slope of the bias curve as a function of temperature, coupled withtemperature uncertainty due to noise.
7. IMU Error Model
An inertial measurement unit (IMU) error model is required for the analysis of the wind estimation techniquesusing either the loosely coupled least–squares approach or the tightly–coupled Kalman filtering approachdescribed in Sec. III. The loosely coupled least–squares solution requires a navigation error model as well,whereas the tightly coupled approach integrates the IMU measurements itself so that the navigation errorsare captured in the state estimate error covariance matrix. The IMU measurement error and linear navigationerror model implemented for the least–squares uncertainty analysis is based on the error analysis presentedin Ref. 44. The IMU measurement error model for the Kalman filtering approach is described in Ref. 22. Inboth cases, systematic error parameters and noise uncertainty inputs to the models are described in Ref. 45.
B. Error Analysis Results
This section describes error analysis results and test cases in order to assess system performance and sensi-tivities.
1. Total System Performance
The basic MEADS least–squares algorithm was used in a performance trade study in order to determine thetotal system accuracy requirements based on the science objectives of 0.5 deg angle of attack and sideslip,2% dynamic pressure, and 0.1 Mach number uncertainties. A series of Monte–Carlo simulation studies wereconducted with random multiplicative pressure error levels of 0.5%, 1.0%, 2.5% and 5.0% of reading. TheseMonte–Carlo simulations were conducted using 3000 runs with a Newtonian flow pressure model and theleast–squares estimator formulated using a fixed pressure ratio of R = 0.001. The results of this study areshown in Fig. 6. From these plots it can be determined that a total system error of 1% of reading meets thescience objectives on the angle of attack, sideslip, and dynamic pressure error levels. Therefore, total systemerror levels of 1% of reading became the requirements for system design.
13 of 21
American Institute of Aeronautics and Astronautics

100
101
102
103
−40
−30
−20
−10
0
10
20
Frequency [Hz]
Mag
nitu
de [d
b]
Case 1 (High−Fidelity)Case 1 (2nd Order)Case 2 (High−Fidelity)Case 2 (2nd Order)Case 3 (High−Fidelity)Case 3 (2nd Order)
(a) Magnitude: Flight Conditions
100
101
102
103
−800
−700
−600
−500
−400
−300
−200
−100
0
Frequency [Hz]
Pha
se [d
eg]
Case 1 (High−Fidelity)Case 1 (2nd Order)Case 2 (High−Fidelity)Case 2 (2nd Order)Case 3 (High−Fidelity)Case 3 (2nd Order)
(b) Phase: Flight Conditions
510152025−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
Mach [q∞ > 850 Pa]
∆ P
ress
ure
[% R
eadi
ng]
Port 1Port 2Port 3Port 4Port 5Port 6Port 7
(c) Nominal Pressure Lag
Figure 7. Tube Response
2. Pneumatic Lag Sensitivity
Due to computational complexities of simulating the tube and transducer response, these models wereemployed in a stand–alone manner in order to assess impacts to system performance. These studies includeboth the high–fidelity frequency domain models suitable for analyzing specific flight conditions as well as2nd–order approximate models suitable for analyzing time histories.
The fist study is an assessment of the port diameter. Three flight conditions were explored using thehigh–fidelity frequency response model, including a high Mach/low pressure case, the maximum pressurecase, and a low Mach/low pressure case. The frequency response for these three conditions are shown inFig. 7(a) and (b). The frequency response of the 2nd order model is also shown for comparison. Table 2shows several important metrics of the frequency response for these three flight conditions. Here, the timeconstant and the time delay (computed from phase loss at 1 Hz frequency) are shown corresponding to thehigh–fidelity (HF) model as well as the 2nd order model. While differences are apparent between the HFand 2nd order models, the trends and orders of magnitude are similar. These results agree to within a factorof 2 or better with an independent implementation using a reduced–order Bergh–Tijdeman model describedin Ref. 46. These results indicate that the response time is acceptable even for the worst–case lag time atthe low Mach, low pressure condition.
Table 2. Response Model Conditions and Results
Condition M∞ q∞, Pa P , Pa τ , sec (HF) τ , sec (2nd) ∆t, sec (HF) ∆t, sec (2nd)1 (High Mach) 29.0 850.0 1630.0 0.34·10−3 0.72·10−3 0.70·10−3 0.75·10−3
2 (Max q∞) 16.8 14015.3 26788.5 0.45·10−3 0.33·10−3 0.55·10−3 0.14·10−3
3 (Low Mach) 3.1 850.0 1595.7 1.31·10−3 0.78·10−3 2.01·10−3 1.09·10−3
A time history of the pressure difference computed using the 2nd order model is shown in Fig. 7(c). If theinput signal is of sufficiently low frequency content, then these lag effects can be corrected by inverting thetransfer function to solve for the pressure signal at the port. Errors in the corrected pressure response are acombination of input uncertainties to the model and inherent error in the modelled physics. The effects ofgeometric uncertainties in the tube length and diameter are investigated in this section. Establishing boundson the physics uncertainties is not discussed in this paper.
Table 3. Response Model Port Diameter Results
Port Diameter, in τ , sec (HF) τ , sec (2nd) ∆t, sec (HF) ∆t, sec (2nd)0.07 6.13·10−3 0.86·10−3 6.61·10−3 1.21·10−3
0.04 5.69·10−2 0.96·10−3 5.49·10−2 1.36·10−3
0.02 2.62 1.04·10−3 0.22 1.47·10−3
14 of 21
American Institute of Aeronautics and Astronautics

100
101
102
103
−80
−70
−60
−50
−40
−30
−20
−10
0
10
Frequency [Hz]
Mag
nitu
de [d
b]
D=0.07in (High−Fidelity)D=0.07in (2nd Order)D=0.04in (High−Fidelity)D=0.04in (2nd Order)D=0.02in (High−Fidelity)D=0.02in (2nd Order)
(a) Magnitude
100
101
102
103
−800
−700
−600
−500
−400
−300
−200
−100
0
Frequency [Hz]
Pha
se [d
eg]
D=0.07in (High−Fidelity)D=0.07in (2nd Order)D=0.04in (High−Fidelity)D=0.04in (2nd Order)D=0.02in (High−Fidelity)D=0.02in (2nd Order)
(b) Phase
5101520250
0.5
1
1.5
2
2.5
3x 10
−3
Mach [qbar > 850 Pa]
Pre
ssur
e E
rror
[% R
eadi
ng]
0.03in0.02in0.01in
(c) Port 5 Lag Sensitivity
Figure 8. Tube Response: Diameter Sensitivity
100
101
102
103
−40
−35
−30
−25
−20
−15
−10
−5
0
5
Frequency [Hz]
Mag
nitu
de [d
b]
L+0.5in (High−Fidelity)L+0.5in (2nd Order)L+0.25in (High−Fidelity)L+0.25in (2nd Order)L+0.1in (High−Fidelity)L+0.1in (2nd Order)
(a) Magnitude
100
101
102
103
−800
−700
−600
−500
−400
−300
−200
−100
0
Frequency [Hz]
Pha
se [d
eg]
L+0.5in (High−Fidelity)L+0.5in (2nd Order)L+0.25in (High−Fidelity)L+0.25in (2nd Order)L+0.1in (High−Fidelity)L+0.1in (2nd Order)
(b) Phase
5101520250
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5x 10
−3
Mach [qbar > 850 Pa]
Pre
ssur
e E
rror
[% R
eadi
ng]
0.5in0.25in0.1in
(c) Port 5 Lag Sensitivity
Figure 9. Tube Response: Length Sensitivity
Table 3 shows the results of a study varying the port diameter for the worst–case flight condition (lowpressure, low Mach) discussed above. Here, the port diameter is varied to as low as 0.02in. These resultsindicate that the 0.07in case may be acceptable but the 0.04in case and below quickly become unacceptable.Figures 8(a) and (b) show the frequency response of the high-fidelity and 2nd-order models for these portdiameters. Discrepancies between the HF and 2nd order models tend to increase with decreasing portdiameter. Arc jet tests conducted for various port diameters indicate that the 0.10in case is acceptable,47
therefore the diameter has been kept as originally designed. However, these results serve to indicate thesensitivity to the port diameter, therefore the diameter uncertainties should be kept as small as possible.Currently, the diameter uncertainty requirement on the tube system is 0.01in.2 The port 5 (worst–case port)pressure lag error due to diameter uncertainty is shown in Fig. 8(c) for a range of diameter uncertainty upto 0.03in. In all cases the lag error is small (note that the errors are shown in % of reading).
Table 4. Response Model Tube Length Results
Tube Length, in τ , sec (HF) τ , sec (2nd) ∆t, sec (HF) ∆t, sec (2nd)+0.1 1.22·10−3 0.80·10−3 2.03·10−3 1.11·10−3
+0.25 1.26·10−3 0.82·10−3 2.08·10−3 1.14·10−3
+0.5 1.31·10−3 0.84·10−3 2.15·10−3 1.18·10−3
Next, a study was conducted to assess the sensitivity to tube length. Three cases were investigated usingat the low pressure, low Mach flight condition. Table 4 summarizes the effects perturbing the total tubelength by increments of 0.1in, 0.25in, and 0.5in. In each case the time constant and time delay metrics donot change considerably. Figures 9(a) and (b) show the frequency response results for these perturbations.These results indicate that the pressure system is not highly sensitive to the tube length. Currently, theMEADS requirement on tube length uncertainty is 0.1in.2 Figure 9(c) shows the time history of the lag error
15 of 21
American Institute of Aeronautics and Astronautics

for port 5 induced by length uncertainties of up to 0.5in. As in the previous case, these errors are acceptablysmall.
3. Thermal Transpiration Sensitivity
510152025−5
−4
−3
−2
−1
0
x 10−4
Mach [q∞ > 850 Pa]
∆ P
ress
ure
[% R
eadi
ng]
Knudsen ModelPotter Model (Abreviated)Potter Model (Full)
(a) Port 1 Transpiration
510152025−5
−4
−3
−2
−1
0
x 10−4
Mach [q∞ > 850 Pa]
∆ P
ress
ure
[% R
eadi
ng]
Knudsen ModelPotter Model (Abreviated)Potter Model (Full)
(b) Port 5 Transpiration
Figure 10. Thermal Transpiration Results
The thermal transpiration models were employed in stand–alone codes in order to assess impacts tosystem performance. Figure 10 shows the results of an analysis comparing the thermal transpiration modelsalong the nominal reference trajectory. Here, the pressure difference between the nominal pressure and thepressure with the thermal transpiration effects is shown for Ports 1 and 5. Results are shown for the Knudsenmodel, the abbreviated Potter model (i.e. without orifice effects) and the full Potter model including theorifice effects. While some difference are apparent between the Knudsen and Potter models, all show thesame trend with similar magnitudes. These results indicate that above 850 Pa dynamic pressure, the thermaltranspiration effects are negligible.
4. System Performance Results
This section describes a system performance analysis on the MEADS algorithms. The error sources includedin this study are the port location uncertainties, time tag errors, and system calibration uncertainties includ-ing temperature uncertainties. Pneumatic lag models and thermal transpiration effects are not considered inthis study, as these errors are expected to be small. IMU and navigation errors are included for determiningwind estimation uncertainties. Performance analysis results are shown for several estimator formulations.First, least–squares estimators have been implemented that use the dynamic pressure and either the Machnumber or static pressure as solution variables, in addition to the angle of attack and sideslip. Additionally,results for a multi–pass Kalman filter approach are shown. In this approach, the first pass through the dataestimates the pressure transducer scale factor errors in addition to the inertial and atmospheric state. Then,the pressure measurements are corrected using the computed scale factor errors, which reduces the total sys-tem uncertainty. The second pass through the data uses this corrected data set to estimate the inertial andatmospheric states. Each estimator uses the CFD database as the surface pressure distribution model. Theleast–squares estimators are assessed using a 500 case Monte–Carlo simulation, whereas the Kalman filterperformance is simulated using a linear covariance analysis. Figure 11(a) shows the total system uncertaintyused in these simulations. Figure 11(b) shows the system uncertainties after the scale factor correction fromthe Kalman filter. The MEADS primary science objectives are shown in Fig. 12. These plots show the 3σperformance of the angle of attack, angle of sideslip, dynamic pressure, and Mach number estimates fromthe two least–squares formulations and both passes from the Kalman filter. The least–squares solutionsare almost identical in these cases, and an improvement is apparent between the first and second pass ofthe Kalman filter solution. These results indicate that the MEADS–only angle of attack objectives are metthrough a large portion of the trajectory but begin to grow above the goal of 0.5 deg accuracy in the low
16 of 21
American Institute of Aeronautics and Astronautics

5101520250
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Mach [q∞ > 850 Pa]
3σ P
ress
ure
Un
cert
ain
ty [
%]
Port 1Port 2Port 3Port 4Port 5Port 6Port 7
(a) System Uncertainties
5101520250
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Mach [q∞ > 850 Pa]
3σ P
ress
ure
Un
cert
ain
ty [
%]
Port 1Port 2Port 3Port 4Port 5Port 6Port 7
(b) Corrected System Uncertainties
Figure 11. Pressure System Uncertainties
Mach regime. The same is true of the sideslip results although the growth above 0.5 deg is smaller than thatof the angle of attack. The dynamic pressure objectives are met easily in these cases, however the Machnumber estimates are not met throughout the trajectory. The Mach number results follow basic intuitionthat the Mach number is not observable in the high Mach regimes.
The 3σ accuracies of the MEADS secondary objectives are shown in Fig. 13. Specifically, these plots showthe static pressure, density, total pressure, and wind estimate performance. The static pressure results showsdifferences between the two least–squares solutions. In the high Mach regime, the estimator formulation usingthe static pressure as a solution variable exhibits a higher error than that using the Mach number. Thisbehavior is likely due to the small pressure ratio combined with small static pressure at these conditions.Later on, as the static pressure and pressure ratio increases as the Mach number decreases, the observabilityon the static pressure is better, leading to better estimates when including static pressure in the solutionset. Given that these estimators perform so differently on estimating the static pressure but the dynamicpressure estimates are essentially identical is in keeping with the observations made in Sec. II that thedynamic pressure can be computed accurately even in the presence of large static pressure uncertainties.
The wind estimates from the loosely–coupled IMU/least–squares formulations are poor in the flight re-gions shown here. This behavior is due to the nearly zero flight path angle in these flight regimes, renderingthe wind estimator nearly singular. In regions below 850 Pa dynamic pressure in the low Mach regime, theflight path angle is increasing in magnitude, which has the effect of improving the wind estimate perfor-mance. The density estimates of the loosely–coupled formulation are also poor due to the large errors in thewind estimates. The tightly–coupled Kalman filter formulations are significantly superior in estimating theatmospheric winds and densities, and moreover can estimate the downward wind component.
V. Current Status and Future Work
Although the pressure transducers passed acceptance testing, a variety of workmanship issues were un-covered in the course of conducting the thermal calibration and environmental testing. One transducer failedcompletely and all others were disqualified from flight status. New transducers are being manufactured bythe vendor, with increased cleanliness and workmanship oversight from NASA. These will be delivered inthe late summer of 2009. Receipt inspection and preliminary thermal characterization will take place atNASA-LaRC, and assignments of Flight and Flight Spare will be made. Environmental acceptance testingwill take place at LaRC in the Fall of 2009, with delivery and integration with MSL in early CY 2010.Preliminary plans are also being made for the acceptance and processing of the flight data following Marsentry in 2012.
Several potential areas with regard to estimator performance and error modelling can be investigated.Investigations will be performed to assess estimator performance in regions below dynamic pressure of 850 Pa.In these regions, especially in the high Mach/high altitude regime, the tube response modelling and thermal
17 of 21
American Institute of Aeronautics and Astronautics

5101520250
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Mach [q∞ > 850 Pa]
3σ α
Unc
erta
inty
[deg
]
LS q−Ps− α−βLS q−M−α−βEKF 1st passEKF 2nd pass0.5 deg limit
(a) Angle of Attack
5101520250
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Mach [q∞ > 850 Pa]
3σ β
Unc
erta
inty
[deg
]
LS q−Ps− α−βLS q−M−α−βEKF 1st passEKF 2nd pass0.5 deg limit
(b) Angle of Sideslip
5101520250
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Mach [q∞ > 850 Pa]
3σ q
∞ U
ncer
tain
ty [%
]
LS q−Ps− α−βLS q−M−α−βEKF 1st passEKF 2nd pass
(c) Dynamic Pressure
5101520250
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Mach [q∞ > 850 Pa]
3σ M
ach
Unc
erta
inty
LS q−Ps− α−βLS q−M−α−βEKF 1st passEKF 2nd pass0.1 limit
(d) Mach Number
Figure 12. MEADS Primary Science Objectives
transpiration effects become much more pronounced and therefore an understanding of model uncertaintiesneeds to be established in order to develop realistic estimator performance results. To this end, a series ofshock tube tests are planned to investigate response model uncertainties. Investigations can be conducted todetermine the feasibility of incorporating the MISP stagnation thermocouple measurements into the Kalmanfilter solution, which may give additional observability on the freestream Mach number.
18 of 21
American Institute of Aeronautics and Astronautics

5101520250
10
20
30
40
50
60
70
80
90
Mach [q∞ > 850 Pa]
3σ p
∞ U
ncer
tain
ty [%
]
LS q−Ps− α−βLS q−M−α−βEKF 1st passEKF 2nd pass
(a) Static Pressure
5101520250
1
2
3
4
5
6
7
8
9
10
Mach [q∞ > 850 Pa]
3σ ρ
∞ U
ncer
tain
ty [%
]
LS q−Ps− α−βLS q−M−α−βEKF 1st passEKF 2nd pass
(b) Density
5101520250
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Mach [q∞ > 850 Pa]
3σ P
t Unc
erta
inty
[%]
LS q−Ps− α−βLS q−M−α−βEKF 1st passEKF 2nd pass
(c) Total Pressure
5101520250
20
40
60
80
100
120
140
160
180
200
Mach [q∞ > 850 Pa]
3σ u
w U
ncer
tain
ty [m
/s]
LS q−Ps− α−βLS q−M−α−βEKF 1st passEKF 2nd pass
(d) North Wind
5101520250
20
40
60
80
100
120
140
160
180
200
Mach [q∞ > 850 Pa]
3σ v
w U
ncer
tain
ty [m
/s]
LS q−Ps− α−βLS q−M−α−βEKF 1st passEKF 2nd pass
(e) East Wind
5101520250
2
4
6
8
10
12
14
16
18
20
Mach [q∞ > 850 Pa]
3σ w
w U
nce
rtai
nty
[m
/s]
EKF 1st passEKF 2nd pass
(f) Down Wind
Figure 13. MEADS Secondary Science Objectives
19 of 21
American Institute of Aeronautics and Astronautics

Acknowledgements
The authors wish to thank David M. Bose for preliminary implementation of the high–fidelity tuberesponse models and early project guidance, Artem A. Dyakonov for supplying the CFD pressure modelsand assistance with interpreting these data, Jeff A. Herath for assistance with modelling the SSE, and TimSchott for conducting independent tube response model analysis.
References
1Gazarik, M. J., Wright, M. J., Little, A., Cheatwood, F. M., Herath, J. A., Munk, M. M., Novak, F. J., and Martinez, E. R.,“Overview of the MEDLI Project,” IEEE 2008 Aerospace Conference, March 2008.
2Munk, M., Hutchinson, M., Mitchell, M., Parker, P., Little, A., Herath, J., Bruce, W., and Cheatwood, N., “MarsEntry Atmospheric Data System (MEADS): Requirements and Design for Mars Science Laboratory (MSL),” 6th InternationalPlanetary Probe Workshop, Atlanta, GA, June 2008.
3Pruett, C. D., Wolf, H., Heck, M. L., and Siemers, P. M., “Innovative Air Data System for the Space Shuttle Orbiter,”Journal of Spacecraft and Rockets, Vol. 20, No. 1, 1983, pp. 61–69.
4Siemers, P. M., Wolf, H., and Flanagan, P. F., “Shuttle Entry Air Data System Concepts Applied to Space Shuttle OrbiterFlight Pressure Data to Determine Air Data – STS 1-4,” American Institute of Aeronautics and Astronautics, AIAA Paper83–018, January 1983.
5Siemers, P. M., Henry, M. W., and Eades, J. B., “Shuttle Entry Air Data System (SEADS) – Advanced Air Data SystemResults: Air Data Across the Entry Speed Range,” Orbiter Experiments (OEX) Aerothermodynamics Symposium, NASACP-3248, Part I, April 1995, pp. 49–78.
6Hampel, F. R., Ronchetti, E. M., Rousseeuw, P. J., and Stahel, W. A., Robust Statistics: The Approach Based on InfluenceFunctions, Wiley, 1986, pp. 307–311.
7Crassidis, J. C. and Junkins, J. L., Optimal Estimation of Dynamic Systems, Chapman & Hall/CRC, Boca Raton, FL,2004.
8Weiss, S., “Comparing Three Algorithms for Modeling Flush Air Data Systems,” American Institute of Aeronautics andAstronautics, AIAA Paper 2002–0535, January 2002.
9Kelly, G. M., Findlay, J. T., and Compton, H. R., “Shuttle Subsonic Horizontal Wind Estimation,” Journal of Spacecraftand Rockets, Vol. 20, No. 4, 1983, pp. 390–397.
10Kasich, D. C. and Cheng, P. Y., “Flush Port / Inertially Blended Air Data Estimator,” American Institute of Aeronauticsand Astronautics, AIAA Paper 91-0670, January 1991.
11Wagner, W. E., “Re-Entry Filtering, Prediction, and Smoothing,” Journal of Spacecraft and Rockets, Vol. 3, No. 9, 1966,pp. 1321–1327.
12Wagner, W. E. and Serold, A. C., “Statistical Trajectory Estimation Programs: Utilization Report,” NASA CR–66837,June 1969.
13Wagner, W. E. and Serold, A. C., “Formulation on Statistical Trajectory Estimation Programs,” NASA CR-1482, January1970.
14“SV-5D PRIME: Final Flight Test Summary,” Martin Marietta, Engineering Report 14465, Denver, CO, September 1967.15Jones, J. F., “Development and Performance Analysis of a Trajectory Estimator for an Entry Trhough the Martian
Atmosphere,” American Institute of Aeronautics and Astronautics, AIAA Paper 72-953, September 1972.16Hopper, F. W., “Trajectory, Atmosphere, and Wind Reconstruction from Viking Entry Measurements,” Americal Astro-
nautical Society, AAS Paper 75-068, July 1975.17Euler, E. A., Adams, G. L., and Hopper, F. W., “Design and Reconstruction of the Viking Lander Descent Trajectories,”
Journal of Guidance and Control, Vol. 1, No. 5, 1978, pp. 372–378.18Sabin, M. L., “Linear Filtering of Ballistic–Entry Probe Data for Atmospheric Reconstruction,” Journal of Spacecraft
and Rockets, Vol. 12, No. 2, 1975, pp. 66–73.19Compton, H. R., Blanchard, R. C., and Findlay, J. T., “Shuttle Entry Trajectory Reconstruction Using Inflight Ac-
celerometer and Gyro Measurements,” American Institute of Aeronautics and Astronautics, AIAA Paper 79-0257, January1979.
20Compton, H. R., Findlay, J., Kelly, G., and Heck, M., “Shuttle (STS-1) Entry Trajectory Reconstruction,” AmericanInstitute of Aeronautics and Astronautics, AIAA Paper 81-2459, November 1981.
21Rao, P. P., “Titan IIIC Preflight and Postflight Trajectory Analysis,” Journal of Guidance, Control, and Dynamics,Vol. 7, No. 2, 1984, pp. 161–166.
22Karlgaard, C. D., Tartabini, P. V., Blanchard, R. C., Kirsch, M., and Toniolo, M. D., “Hyper–X Post–Flight TrajectoryReconstruction,” Journal of Spacecraft and Rockets, Vol. 43, No. 1, 2006, pp. 105–115.
23Beck, R. E., “Flight Trajectory and Axial Force Coefficient Data Reduction Scripts for IRVE,” Analytical MechanicsAssociates, Inc., AMA Report 06-09, June 2006.
24Beck, R. E. and Karlgaard, C. D., “Ares I-X: Best Estimated Trajectory Uncertainty Predictions,” Analytical MechanicsAssociates, Inc., AMA Report 09-21, March 2009.
25Bergh, H. and Tijdeman, H., “Theoretical and Experimental Results for the Dynamic Response of Pressure MeasuringSystems,” NLR–TR F.238, January 1965.
26Whitmore, S. A., “Frequency Response Model for Branched Pneumatic Sensing Systems,” Journal of Aircraft, Vol. 43,No. 6, 2006, pp. 1845–1853.
27Whitmore, S. A. and Fox, B., “Improved Accuracy, Second–Order Response Model for Pressure Sensing Systems,” Journalof Aircraft, Vol. 46, No. 2, 2009, pp. 491–500.
20 of 21
American Institute of Aeronautics and Astronautics

28Beck, R., Karlgaard, C., and O’Keefe, S., “Mars Entry Atmospheric Data System Post-Flight Data Analysis Tool:Modeling and Sensitivity Updates,” Analytical Mechanics Associates, Inc., AMA Report 07-20, December 2007.
29Beck, R. and Karlgaard, C., “Summary of MEADS Error Model Enhancements,” Analytical Mechanics Associates, Inc.,AMA Report 08-01, February 2008.
30Whitmore, S. A. and Moes, T. R., “Measurement Uncertainty and Feasibility Study of a Flush Airdata System forHypersonic Flight Experiment,” NASA TM 4627, 1994.
31Kennard, E. H., Kinetic Theory of Gases, McGraw–Hill, New York, 1938, pp. 327–333.32Knudsen, M., “Thermischer Molekulardruck in Rohren,” Annalen der Physik, Vol. 83, 1927, pp. 797–821.33Rasmussen, M., Hypersonic Flow, John Wiley & Sons, Inc., New York, 1994.34Potter, J. L., “Correction of Measured Pressures to Account for Thermomolecular Flow in Orifices and Tubes: User Guide
and Program,” Analytical Mechanics Associates, Inc., NASA Contract No. NAS1–18935, October 1991.35Potter, J. L., Kinslow, M., and Boylan, D. E., “An Influence of the Orifice on Measured Pressures in Rarefied Flow,” 4th
Symposium on Rarefied Gas Dynamics, de Leeuw, J. H. (Ed.), Vol. 2, 1966, pp. 175–194.36Kinslow, M. and Arney, G. D., Jr., “Thermomolecular Pressure Effects in Tubes and at Orifices,” AGARDograph 119,
August 1967.37Kinslow, M. and Potter, J. L., “Reevaluation of Parameters Relative to the Orifice Effect,” 7th Symposium on Rarefied
Gas Dynamics, Dini, D., (Ed.), Vol. 1, 1971, pp. 399–408.38Siemers, P. M., Bradley, P. F., Wolf, H., Flanagan, P. F., Weilmuenster, K. J., and Kern, F. A., “Shuttle Flight Pressure
Instrumentation: Experience and Lessons for the Future,” NASA Langley Conference on Shuttle Performance: Lessons Learned,Hampton, VA, March 1983.
39Wolf, H., Flanagan, P. F., and Henry, H. W., “Shuttle Entry Air Data System Program Manual,”Analytical MechanicsAssociates, Inc., AMA Report 85–4, March 1985.
40Gibson, F. A., Henry, M. W., and Eades, J. B., Jr., “Shuttle Entry Air Data System (SEADS) Data Analysis: A HistoricalPerspective,” Analytical Mechanics Associates, Inc., AMA Report 92–7, December 1992.
41Gibson, L. S. and Sealey, B. S., “Test and Evaluation of Pressure Transducers for a Reentry Vehicle Pressure MeasurementSystem,” 39th International Instrumentation Symposium, May 1993, pp. 1013–1030.
42Parker, P. A., Hutchinson, M. A., Mitchell, M., and Munk, M. M., “Strategic Pressure Measurement System Charac-terization of the Mars Entry Atmospheric Data System,” 6th International Planetary Probe Workshop, Atlanta, GA, June2008.
43Karlgaard, C., Siemers, P., White, B., and O’Keefe, S., “Mars Entry Atmospheric Data System Performance Analysis,”Analytical Mechanics Associates, Inc., AMA Report 09-02, January 2009.
44Farrell, J. A. and Barth, M., The Global Positioning System and Inertial Navigation, McGraw-Hill, New York, 2000.45Konefat, E. H. and Litty, E. C., “Mars Science Laboratory Descent Inertial Measurement Unit,” JPL Report D-34226,
MSL-476-1237, March 7th, 2006.46Chapin, W. G., “Dynamic-Pressure Measurements Using an Electrically Scanned Pressure Module,” NASA TM–84650,
July 1983.47Bruce, W. and Siemers, P. M., “Aerothermal Effects of the MEDLI/MEADS Pressure Ports on the MSL PICA Heatshield
and Compliance with Requirements,” MEDLI-0197, May 2009.
21 of 21
American Institute of Aeronautics and Astronautics