Manual de Robotica Lego Mindstorms Nxt
16
Manual de ROBOTICA LEGO MINDSTORMS NXT Engranajes : tipos de engranajes y relaciones Qué es un engranaje? Es una rueda dentada que encaja con otros engranajes Para qué sirven? Los engranajes sirven para cambiar: •velocidad •torque (f uerza de rotación) •dirección de los ejes. Diferentes tipos de engranajes Engranaje RECTO Engranajes LIBRES o INTERMEDIOS Engranaje GUSANO o SIN FIN
-
Upload
cesar-villagra-obando -
Category
Documents
-
view
312 -
download
1
Transcript of Manual de Robotica Lego Mindstorms Nxt

7/27/2019 Manual de Robotica Lego Mindstorms Nxt
http://slidepdf.com/reader/full/manual-de-robotica-lego-mindstorms-nxt 1/16
Manual de ROBOTICA LEGO MINDSTORMS NXT
Engranajes : tipos de engranajes y relaciones
Qué es un engranaje?
Es una rueda dentada que encaja
con otros engranajes
Para qué sirven?
Los engranajes sirven para
cambiar:
•velocidad•torque (fuerza de rotación)
•dirección de los ejes.
Diferentes tipos de engranajes
Engranaje RECTO
Engranajes LIBRES o
INTERMEDIOS
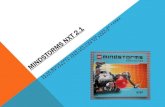
Engranaje GUSANO o SIN FIN
7/27/2019 Manual de Robotica Lego Mindstorms Nxt
http://slidepdf.com/reader/full/manual-de-robotica-lego-mindstorms-nxt 2/16
Uso del engranaje GUSANO o SIN FIN
Engranaje CÓNICO oBISELADO
BANDAS Y POLEAS
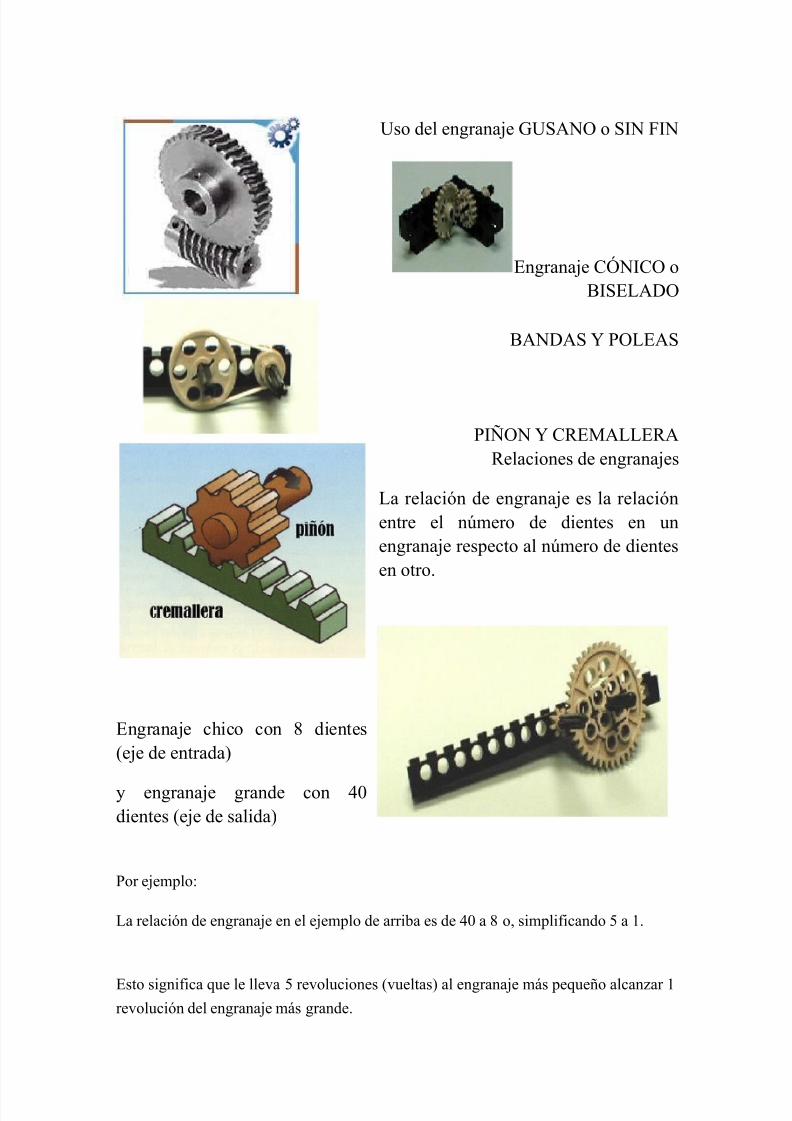
PIÑON Y CREMALLERARelaciones de engranajes
La relación de engranaje es la relaciónentre el número de dientes en unengranaje respecto al número de dientesen otro.
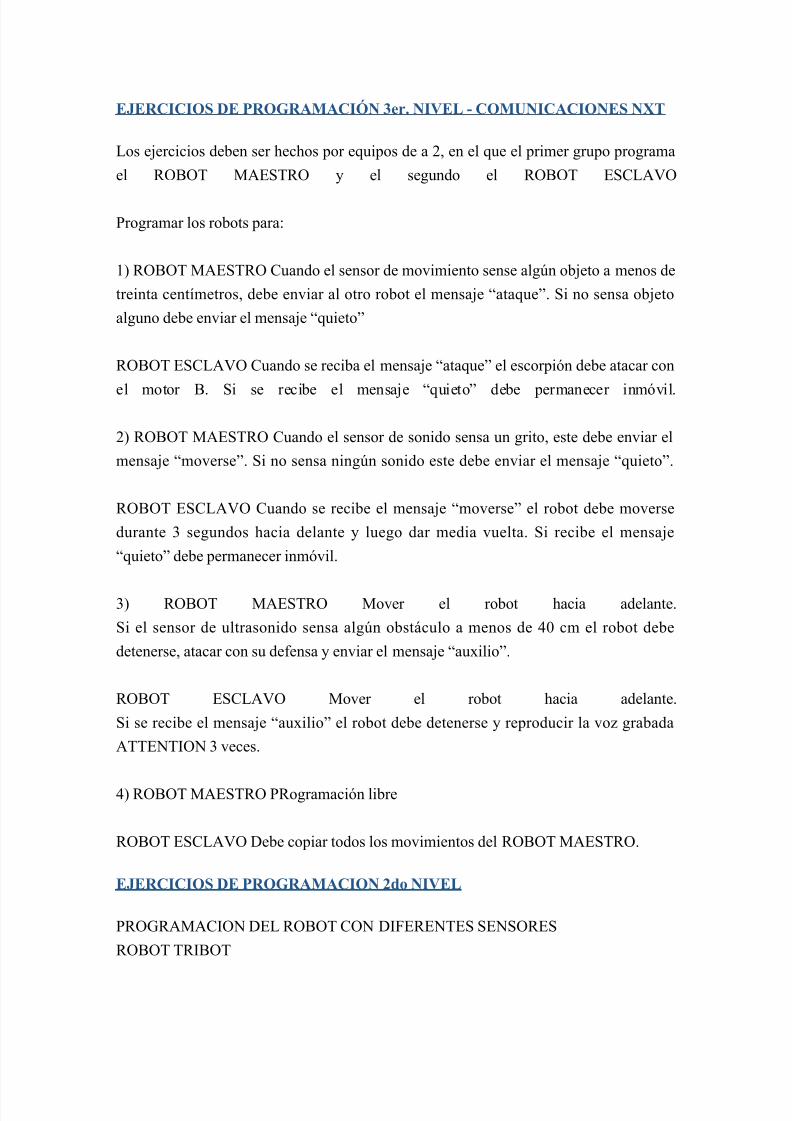
Engranaje chico con 8 dientes(eje de entrada)
y engranaje grande con 40dientes (eje de salida)
Por ejemplo:
La relación de engranaje en el ejemplo de arriba es de 40 a 8 o, simplificando 5 a 1.
Esto significa que le lleva 5 revoluciones (vueltas) al engranaje más pequeño alcanzar 1revolución del engranaje más grande.

7/27/2019 Manual de Robotica Lego Mindstorms Nxt
http://slidepdf.com/reader/full/manual-de-robotica-lego-mindstorms-nxt 3/16
La relación de engranaje proporciona el cambio en la velocidad y torque de los ejes de
rotación. Si le lleva 5 vueltas al engranaje de 8 dientes por cada vuelta del engranaje de
40 dientes, significa que el engranaje de 40 dientes girará 5 veces más lento que el de 8
dientes.
Pero, también significa que el eje del engranaje de 40 dientes tiene 5 veces el torque
(fuerza de rotación) del eje con el engranaje de 8 dientes
Quiere decir que si en en el eje de engranaje chico (engranaje de entrada) pusieramos el
motor; y en el eje de engranaje grande (engranaje de salida) pusieramos la rueda; lo que
estariamos logrando en nuestro robot es que sea 5 veces más fuerte en la rotación de larueda pero a su vez 5 veces más lento!
Comunicando NXT en forma inalámbrica
La forma de comunicarse en forma inalámbrica en los robots mindstorms NXT es a
través del dispositivo BLUETOOTH. Antes de que podamos enviar mensajes de un
robot a otro, hay que configurarlos.
En el robot "maestro" que configuraremos para enviar mensajes a otro, debemos entrar al menú bluetooth de la pantalla, y elegir "search" para que busque otros robots con
bluetooth habilitados. Una vez encontrados le tenemos que asignar al robor "exclavo"
un número de conexión (1, 2 o 3).
La primera vez que la conexión es establecida entre dos NXT, un aviso para ingresar el
PASSWORD será presentado en las pantallas, y deberá ser aceptados por ambos.
Ahora cuando navegamos por la categoría "conection" del robot "maestro" NXT, el
nombre del robot "esclavo" debe ocupar el número de conexión establecida.Es necesario pasar por este proceso una única vez, el NXT de recepción pondrá al día
automáticamente su conexión cuando el robot "maestro" NXT esté fijando su número de
conexión.
Para saber como enviar y recibir mensajes entre robots, debemos ir al link
MANUAL DEL PROGRAMADOR NXT - COMUNICACIONES NXT disponible
en este blog.
Los ejercicios para comunicaciones son los del 3er NIVEL.
7/27/2019 Manual de Robotica Lego Mindstorms Nxt
http://slidepdf.com/reader/full/manual-de-robotica-lego-mindstorms-nxt 4/16
EJERCICIOS DE PROGRAMACIÓN 3er. NIVEL - COMUNICACIONES NXT
Los ejercicios deben ser hechos por equipos de a 2, en el que el primer grupo programa
el ROBOT MAESTRO y el segundo el ROBOT ESCLAVO
Programar los robots para:
1) ROBOT MAESTRO Cuando el sensor de movimiento sense algún objeto a menos de
treinta centímetros, debe enviar al otro robot el mensaje “ataque”. Si no sensa objeto
alguno debe enviar el mensaje “quieto”
ROBOT ESCLAVO Cuando se reciba el mensaje “ataque” el escorpión debe atacar con
el motor B. Si se recibe el mensaje “quieto” debe permanecer inmóvil.
2) ROBOT MAESTRO Cuando el sensor de sonido sensa un grito, este debe enviar el
mensaje “moverse”. Si no sensa ningún sonido este debe enviar el mensaje “quieto”.
ROBOT ESCLAVO Cuando se recibe el mensaje “moverse” el robot debe moverse
durante 3 segundos hacia delante y luego dar media vuelta. Si recibe el mensaje
“quieto” debe permanecer inmóvil.
3) ROBOT MAESTRO Mover el robot hacia adelante.
Si el sensor de ultrasonido sensa algún obstáculo a menos de 40 cm el robot debe
detenerse, atacar con su defensa y enviar el mensaje “auxilio”.
ROBOT ESCLAVO Mover el robot hacia adelante.
Si se recibe el mensaje “auxilio” el robot debe detenerse y reproducir la voz grabada
ATTENTION 3 veces.
4) ROBOT MAESTRO PRogramación libre
ROBOT ESCLAVO Debe copiar todos los movimientos del ROBOT MAESTRO.
EJERCICIOS DE PROGRAMACION 2do NIVEL
PROGRAMACION DEL ROBOT CON DIFERENTES SENSORES
ROBOT TRIBOT
7/27/2019 Manual de Robotica Lego Mindstorms Nxt
http://slidepdf.com/reader/full/manual-de-robotica-lego-mindstorms-nxt 5/16
Programar el Robot para que:
Ejercicios por tiempo
1) Se mueva hacia adelante durante 5 segundos, de medio giro, y se mueva por otros 10
segundos más a máxima velocidad. Utilizar para mover los motores, la opcion
ROTACIÓN de ruedas calculando cuantas vueltas se necesita de una rueda para cumplir
el medio giro
2) Hacer que el robot se mueva hacia adelante a velocidad intermedia. Si sensa algún
obstáculo con el sensor de ultrasonido a menos de 30 cm, hacer que el Robot se detenga.
Uso de la herramienta LOOP y SWITCH
3) Hacer que el robot se mueva hacia adelante a velocidad intermedia. Si sensa algún
obstáculo con el sensor de ultrasonido debe dar 1/4 de vuelta y continuar su camino.
Este proceso se debe hacer indefinidamente.
Utilizar en el motor la herramienta GRADOS para calcular el cuarto de giro del Robot
4) Hacer que el robot se mueva hacia adelante a velocidad máxima. Utilizando el sensor
de sonido debemos hacer que el robot de medio giro en cuanto se produzca un aplauso.
Este proceso se debe repetir indefinidamente.
5) Utilizando el sensor de luz debemos programar al robot para que no caiga de la mesa
6) Utilizando el sensor de luz hacer un seguidor de linea negra.
Uso de la herramienta LOOP y SWITCH dentro de otro SWITCH
7) Manteniendo el robot sin que caiga de la mesa, hacer que el mismo agarre las pelotas
con sus pinzas al producirse un aplauso.
8) Manteniendo el robot sin que caiga de la mesa, hacer que el mismo esquive
obstaculos que se encuentran a menos de 10 cm de distancia, haciendo que el robot de
1/4 de giro y continuando su marcha.
9) Hacer un seguir de linea negra que se detenga cuando tenga un obstaculo a menos de15 cm.
7/27/2019 Manual de Robotica Lego Mindstorms Nxt
http://slidepdf.com/reader/full/manual-de-robotica-lego-mindstorms-nxt 6/16
10) Hacer que el robot ubique las pelotas y las arroje fuera de la mesa. Con un aplauso
el programa debe finalizar.
EJERCICIOS DE PROGRAMACION 1er NIVEL
EJERCICIOS DE PROGRAMACION CON ROBOTS TEMPORIZADOS
Programar el robot para que:
1) Que se mueva hacia delante durante 10 segundos (a máxima velocidad)
2) Que se mueva hacia delante durante 5 segundos y luego de marcha atrás durante 15
segundos.
3) Que se mueva hacia atrás durante 5 segundos a la velocidad más lenta y luego
durante 5 segundos hacia adelante a máxima velocidad.
4) A velocidad baja, calcular cuánto tarda el robot en recorrer 1 metro.
5) Calcular cuál es el largo en metros del ancho del pasillo, sabiendo cuánto tarda en
recorrer un metro nuestro robot
6) Calcular cuál es el largo de nuestra mesa.
7) Que se mueva hacia delante durante 4 segundos, de media vuelta y avance otros 5
segundos.
8) Que se mueva a hacia a delante durante 3 segundos, de media vuelta y avance 2
segundos y de otra media vuelta para avanzar durante 5 segundos.
9) Hacer que el robot recorra en forma de “S” la distancia de un metro
aproximadamente.
EJERCICIOS DE PROGRAMACIÓN DE ROBOTS CON SENSORES para reaccionar
al ambiente.
Programar el Robot para que:
1) Se mueva hacia delante a velocidad media y cuándo el sensor de tacto sea
presionado, retroceda un segundo y luego de media vuelta
2) Igual al anterior pero que lo haga indefinidamente.
3) Se mueva hacia delante esquivando obstáculos indefinidamente.
4) Se mueva hacia delante esquivando en forma de S, 4 obstáculos.
5) Programar el robot para que no se caiga de la mesa, utilizando el sensor de luz
6) Programar un robot seguidor de linea utilizando el sensor de luz.

7/27/2019 Manual de Robotica Lego Mindstorms Nxt
http://slidepdf.com/reader/full/manual-de-robotica-lego-mindstorms-nxt 7/16
Sensores
Los sensores son un componente crucial a cualquier máquina que se denomine un robot.
Los sensores entregan información sobre el robot y el ambiente en el cual está
interactuando, al computador (cerebro) del robot. El programa computacional del robotdecide que hacer basándose en esa información y en sus propias instrucciones de tareas
de alto nivel. En el kit MindStorms NXT encontrarás hasta 4 tipos de sensores.
Sensor de contacto: dispone de un interruptor que al ser presionado envia una señal al
NXT. Este sensor es útil para detectar obstáculos.
Sensor de ultrasonido: al igual que los murciélagos, este sensor emite un
ultrasonido imperceptible para el oido humano, que hace rebotar en los objetos más
proximos y con el cuál calcula la proximidad de los mismos.
Sensor de Luz: se utiliza para sensar la luz ambiente o para medir el
rebote de su propia luz como por ejemplo contra el piso. Tambien se lo utiliza para
sensar colores en un piso ya que cada color emite un reflejo diferente.
Sensor de sonido: se lo utiliza para reaccionar a sonidos del ambiente.
Por ejemplo para que accione sus motores cuando percibe un aplauso.
7/27/2019 Manual de Robotica Lego Mindstorms Nxt
http://slidepdf.com/reader/full/manual-de-robotica-lego-mindstorms-nxt 8/16
Clasificación de robots
Una clasificación un tanto general, de acuerdo a la utilidad social de los robots sería la
siguiente:
Robots manipuladores para uso industrial: Por ejemplo en la industria automotriz. Por lo
general tienen forma de brazo mecánico al que se le agrega una herramienta. Sirven
para pintar, soldar, cortar, etc
.
Vehículos a control remoto: Que se usan para transportar herramientas o acceder a
lugares de difícil o imposible acceso para el hombre. Construyen túneles, apagan
incendios, recorren superficies de un planeta, etc.
Robots didácticos: Son los utilizados para el aprendizaje de la robótica, como el
mindstorms nxt
Cuales son las partes de un robot
Qué partes componen un robot
La estructura Es el esqueleto o chasis del robot. Le da forma y sostiene al resto de las partes.
Los mecanismos Son los elementos que permiten transmitir el movimiento entre sus
partes. Los movimientos de giro, de desplazamiento.
Por ejemplo los engranajes, las poleas, las correas, las ruedas, etc.
Las fuentes de energía Aquí podemos distinguir la energía eléctrica, que en nuestro caso
serán las baterías, y la energía mecánica, que es entregada al robot por el motor.
El motor convierte energía eléctrica en energía mecánica
Los elementos de control: Son los elementos que permiten controlar las acciones del
robot, existen diferentes modelos.
El nuestro es el ladrillo NXT
7/27/2019 Manual de Robotica Lego Mindstorms Nxt
http://slidepdf.com/reader/full/manual-de-robotica-lego-mindstorms-nxt 9/16
Los sensores: Son lo elementos que le entregan información al robot para que éste
pueda conocer la situación exterior.
Por ejemplo sensores de tacto, de luz, de temperatura, etc.
La programación: El programa (software) le indica al elemento de control que debe
hacer. Existen varios lenguajes de programación.
Nosotros utilizamos el MINDSTORMS NXT
Generalidades
Cómo se creó la palabra Robot
La palabra “robot” la utilizó por primera vez el escritor Karel Capek quien, en 1917
denominó a unas máquinas construidas por el hombre y dotadas de inteligencia. Deriva
de “robotnik” que define al “esclavo de trabajo”.
Cuáles son las leyes robóticas
En su libro “I ROBOT” en el año 1950, el escritor Isaac Asimov enuncia las TRES
LEYES ROBÓTICAS:
1. Un robot no debe dañar a un ser humano o, por su inacción, dejar que un ser humano
sufra daño.
2. Un robot debe obedecer las órdenes que le son dadas por un ser humano, excepto
cuando estas órdenes están en oposición con la primera Ley.
3. Un robot debe proteger su propia existencia, hasta donde esta protección no esté en
conflicto con la primera o segunda Ley.
Cómo se define hoy un RobotEl Instituto Norteamericano de Robótica define Robot de la siguiente forma:
Manipulador multifuncional y reprogramable, diseñado para mover materiales, piezas,
herramientas o dispositivos especiales, mediante movimientos programados y variables
que permiten llevar a cabo diversas tareas
MANUAL DEL PROGRAMADOR NXT
Qué es un programa

7/27/2019 Manual de Robotica Lego Mindstorms Nxt
http://slidepdf.com/reader/full/manual-de-robotica-lego-mindstorms-nxt 10/16
Es una secuencia de “órdenes” que debemos organizar lógicamente para que cumplan
determinado propósito. En nuestro caso, para que el Robot cumpla con la función que
queremos.
A continuación te vamos a explicar cómo se agrupan estas órdenes (en nuestro caso
gráficas) para que el robot se mueva y reaccione al ambiente de acuerdo a los
enunciados dados.
Ejemplos de programas en el MINDSTORMS NXT
Que el robot:
1) Se mueva hacia delante durante 2 segundos y luego se detenga.
Debemos hacer mover los motores conectados en los puertos A y B y pasados los dos
segundos hacer que se detengan.
La dirección, los puertos y el tiempo se indican en el panel de abajo
Debemos tildar los
puertos en los que están los dos motores, indicar la dirección y el tiempo
2) Se mueva hacia delante durante 2 segundos y luego de marcha atrás durante 4
segundos y se detenga.
En el bloque de la
derecha le cambiamos la dirección y el tiempo

7/27/2019 Manual de Robotica Lego Mindstorms Nxt
http://slidepdf.com/reader/full/manual-de-robotica-lego-mindstorms-nxt 11/16
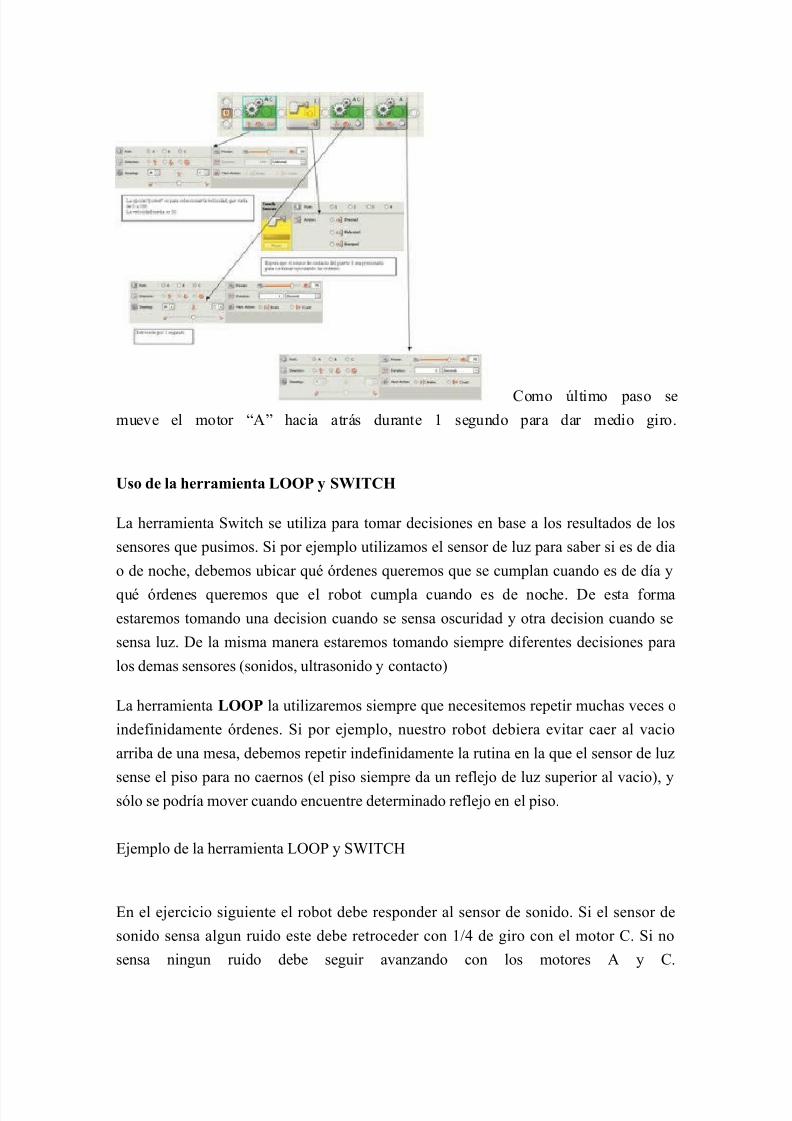
1) Se mueva hacia delante durante 4 segundos, de media vuelta y avance otros 6
segundos y se detenga. (Atención: para hacer dar media vuelta al robot, debes hacer
girar a un solo motor en dirección contraria y estimar cuanto tardaría en completar el
medio giro. La otra forma de dar medio giro es hacer girar los dos motores en sentido
contrario durante un tiempo determinado)
EJERCICIOS DE PROGRAMACIÓN DE ROBOTS CON SENSORES para reaccionar
al ambiente
4) Se mueva hacia delante a velocidad media y cuándo el sensor de contacto sea
presionado, retroceda un segundo y luego de media vuelta
7/27/2019 Manual de Robotica Lego Mindstorms Nxt
http://slidepdf.com/reader/full/manual-de-robotica-lego-mindstorms-nxt 12/16
Como último paso semueve el motor “A” hacia atrás durante 1 segundo para dar medio giro.
Uso de la herramienta LOOP y SWITCH
La herramienta Switch se utiliza para tomar decisiones en base a los resultados de los
sensores que pusimos. Si por ejemplo utilizamos el sensor de luz para saber si es de dia
o de noche, debemos ubicar qué órdenes queremos que se cumplan cuando es de día y
qué órdenes queremos que el robot cumpla cuando es de noche. De esta formaestaremos tomando una decision cuando se sensa oscuridad y otra decision cuando se
sensa luz. De la misma manera estaremos tomando siempre diferentes decisiones para
los demas sensores (sonidos, ultrasonido y contacto)
La herramienta LOOP la utilizaremos siempre que necesitemos repetir muchas veces o
indefinidamente órdenes. Si por ejemplo, nuestro robot debiera evitar caer al vacio
arriba de una mesa, debemos repetir indefinidamente la rutina en la que el sensor de luz
sense el piso para no caernos (el piso siempre da un reflejo de luz superior al vacio), y
sólo se podría mover cuando encuentre determinado reflejo en el piso.
Ejemplo de la herramienta LOOP y SWITCH
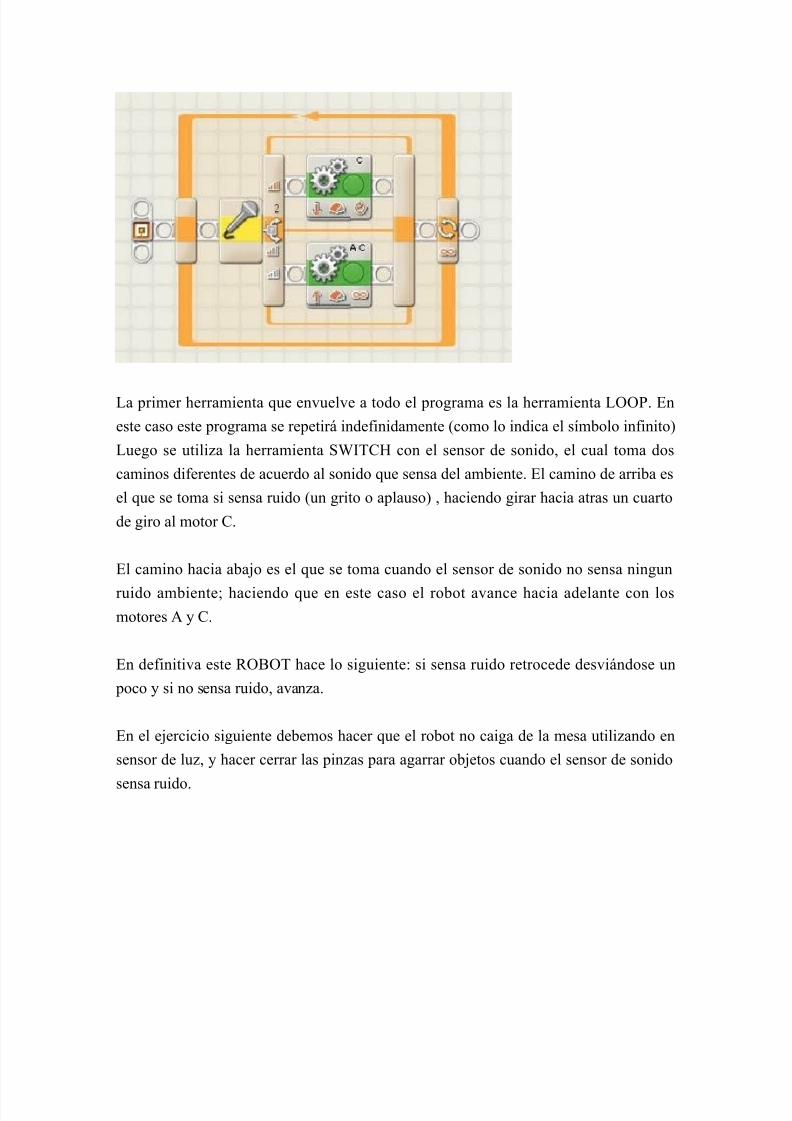
En el ejercicio siguiente el robot debe responder al sensor de sonido. Si el sensor de
sonido sensa algun ruido este debe retroceder con 1/4 de giro con el motor C. Si no
sensa ningun ruido debe seguir avanzando con los motores A y C.
7/27/2019 Manual de Robotica Lego Mindstorms Nxt
http://slidepdf.com/reader/full/manual-de-robotica-lego-mindstorms-nxt 13/16
La primer herramienta que envuelve a todo el programa es la herramienta LOOP. En
este caso este programa se repetirá indefinidamente (como lo indica el símbolo infinito)
Luego se utiliza la herramienta SWITCH con el sensor de sonido, el cual toma dos
caminos diferentes de acuerdo al sonido que sensa del ambiente. El camino de arriba es
el que se toma si sensa ruido (un grito o aplauso) , haciendo girar hacia atras un cuarto
de giro al motor C.
El camino hacia abajo es el que se toma cuando el sensor de sonido no sensa ningun
ruido ambiente; haciendo que en este caso el robot avance hacia adelante con losmotores A y C.
En definitiva este ROBOT hace lo siguiente: si sensa ruido retrocede desviándose un
poco y si no sensa ruido, avanza.
En el ejercicio siguiente debemos hacer que el robot no caiga de la mesa utilizando en
sensor de luz, y hacer cerrar las pinzas para agarrar objetos cuando el sensor de sonido
sensa ruido.

7/27/2019 Manual de Robotica Lego Mindstorms Nxt
http://slidepdf.com/reader/full/manual-de-robotica-lego-mindstorms-nxt 14/16
Primero sensamos el rebote de luz que produce la lámpara del sensor para saber si
estamos saliendo de la mesa.
Si sensa oscuridad (el sensor está fuera de la mesa y no recibe rebote de luz) seguimos
los pasos de abajo: retrocedemos con los dos motores y hacemos un giro con un solomotor para desviarnos.
Si sensa luz (estamos dentro de la mesa ya que hay rebote de luz) seguimos los pasos de
arriba: avanzamos y si sensa ruido detenemos los motores A y C , luego cierra la pinza
con el motor B para agarrar el objeto, da un cuarto de giro con el motor A y abre las
pinzas para soltar el objeto. Si no sensa ruido continua el camino.
Como todo está envuelto en un LOOP infinito, al terminar cualquiera de los dos
caminos el programa vuelve a empezar.
MANUAL DEL PROGRAMADOR NXT - COMUNICACIONES POR
BLUETOOTH
Una vez que los dos robots están conectados por bluetooth comenzamos con la
programación de cada uno. Uno será el Robot MAESTRO, quién será el encargado de
mandar los mensajes (órdenes) al robot esclavo, quién a su vez recibirá los mensajes y
actuará de acuerdo a ellos. Recordemos que la manera de enviar órdenes es mediantemensajes de texto. Por ejemplo si el Robot MAESTRO envía el mensaje “movete”, en
el Robot ESCLAVO deberemos programar para que cuando recibamos la palabra
“movete” este mueva los motores para que realmente se mueva.
Vamos a mostrar la programación del ROBOT MAESTRO

7/27/2019 Manual de Robotica Lego Mindstorms Nxt
http://slidepdf.com/reader/full/manual-de-robotica-lego-mindstorms-nxt 15/16
Esta programación funciona de la siguiente manera:
Primero toda la programación está encerrada en un LOOP infinito, por lo que los
comandos que están dentro, siempre vuelven a repetirse.
El primer comando es un SWITCH, el que nos permite saber si el sensor de contacto
está o no siendo presionado. El dibujo nos muestra que la programación por la parte de
arriba está hecha por si el botón está siendo presionado y la de abajo la hace cuando el
botón no es presionado.
Si el sensor es presionado pone en funcionamiento el comando de bluetooth para
ENVIAR MENSAJES, y envia el texto “movete”.
Cuando el sensor no es presionado envia el mensaje “quieto”
Ahora observemos la programación del ROBOT ESCLAVO
7/27/2019 Manual de Robotica Lego Mindstorms Nxt
http://slidepdf.com/reader/full/manual-de-robotica-lego-mindstorms-nxt 16/16
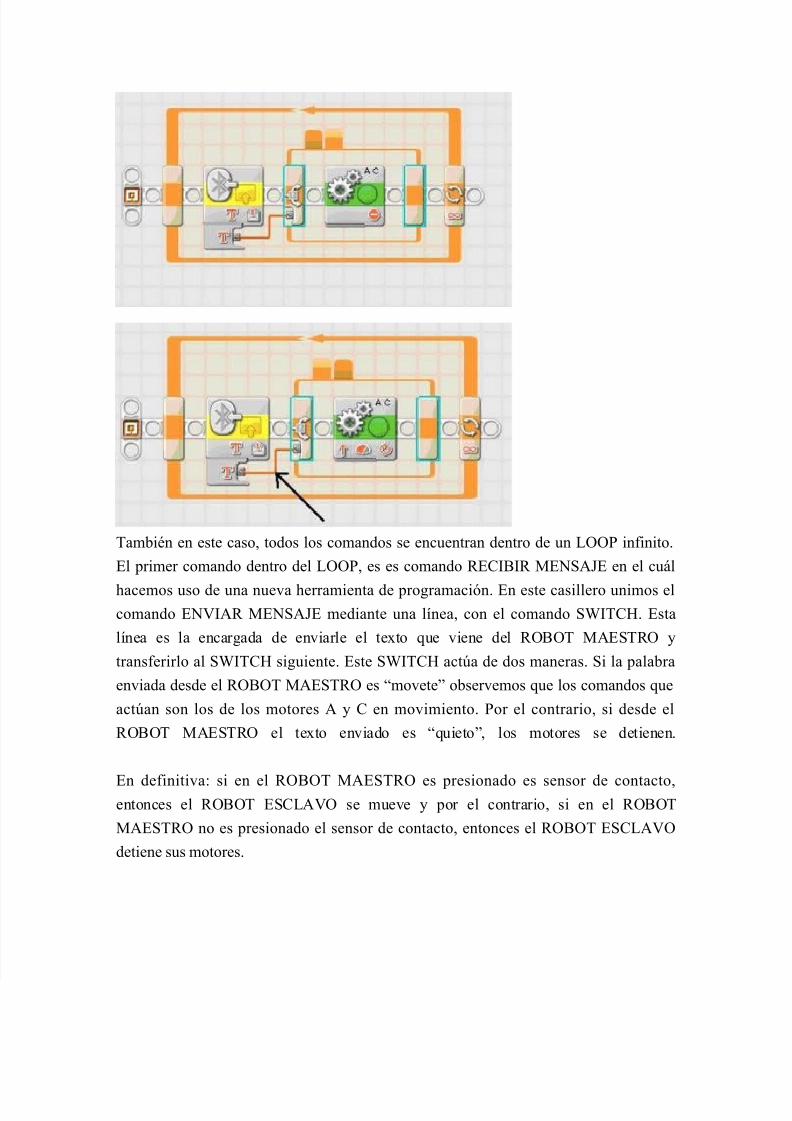
También en este caso, todos los comandos se encuentran dentro de un LOOP infinito.
El primer comando dentro del LOOP, es es comando RECIBIR MENSAJE en el cuál
hacemos uso de una nueva herramienta de programación. En este casillero unimos elcomando ENVIAR MENSAJE mediante una línea, con el comando SWITCH. Esta
línea es la encargada de enviarle el texto que viene del ROBOT MAESTRO y
transferirlo al SWITCH siguiente. Este SWITCH actúa de dos maneras. Si la palabra
enviada desde el ROBOT MAESTRO es “movete” observemos que los comandos que
actúan son los de los motores A y C en movimiento. Por el contrario, si desde el
ROBOT MAESTRO el texto enviado es “quieto”, los motores se detienen.
En definitiva: si en el ROBOT MAESTRO es presionado es sensor de contacto,entonces el ROBOT ESCLAVO se mueve y por el contrario, si en el ROBOT
MAESTRO no es presionado el sensor de contacto, entonces el ROBOT ESCLAVO
detiene sus motores.