Russian wellness tourism - current state, trends and opportunities, Nina Tsymbal

National Academy of Sciences of Ukraine National Space Agency of Ukraine
Radar Techniques and Facilities for On-Line Remote Sensing of the Earth
from Aerospace Carriers
Edited by Academician of the NASU S.N. Konyukhov Corresponding Member of the NASU V.I. Dranovsky Dr. V.N. Tsymbal Translated by V.I.Soroka
Kharkov
2010

The Monograph Radar Techniques and Facilities for On-Line Remote Sensing of the Earth from Aerospace
Carriers
The present book is a carefully arranged summary of engineering and scientific achievements resulting from the research efforts and practical applications associated with the development and testing of different radar systems for on-line remote sensing of the Earth's environment. These systems were installed both aboard the EOS "Cosmos-1500/Okean/Sich" and a number of aircrafts.
A special emphasis was placed upon physicotechnical specificities and data acquisition potentialities of these systems, particularly, their calibration characteristics and data processing techniques. Scientific and methodical problems associated with a real-time retrieval of data on the state of the World Ocean surface, ice and land have been widely discussed. A number of specific examples of thematic interpretation and practical use of radar data are cited. The book is intended for these who are interested in exploring the natural resources from space, meteorology, environmental protection, geocryology radiophysics and electronics. It is also hoped that it will be of much benefit in terms of having appropriate qualifications for these particular businesses.
Reviewers: Academician of the NASU L.N. Litvinenko, Director of the Radioastronomical Institute of the NASU Dr. O.P. Fedorov, Director of the Space Research Institute of the NASU and NSAU Corresponding Member of the NASU V.I. Lyalko, Director of the Scientific Centre for Aerospace Research of the Earth of the NASU Dr. V.K. Volosyuk, Prof. of the N.Ye. Shukovsky National Aerospace University (NAU) "Kharkov Aviation Institute".
Autors A.G. Boyev (§1.1, §1.2); V.B. Yefimov (§1.3); V.N. Tsymbal, S.Ye. Yatsevich (§1.4); I.A. Kalmykov, V.N. Tsymbal (§2); A.S. Kurekin, O.L. Yemelyanov, S.S. Kavelin, Yu.D. Saltykov, O.Yu. Kulilovsky, A.M. Popel (§2.1); A.Ya. Matveyev, V.N. Tsymbal, A.P. Yevdokimov, V.V. Kryzhanovsky, D.M. Bychkov (§2.2); O.V. Sytnik (§2.3); A.Ya. Matveyev, S.Ye. Yatsevich (§2.4); A.S. Gavrilenko (§2.5); V.N. Tsymbal (§§3.1-3.6); V.B. Yefimov (§§4.1-4.3); V.B. Yefimov, I.A. Kalmykov (§4.4); V.N. Tsymbal, I.A. Kalmykov (§§4.6, 4.7); A.G. Boyev, A.Ya. Matveyev, V.N. Tsymbal (§5.1); A.Ya. Matveyev (§5.2); A.Ya. Matveyev, V.N. Tsymbal (§5.3) S.E. Yatsevich, I.A. Kalmykov (§6.1); V.N. Tsymbal (§§6.2, 6.3); V.N. Tsymbal, A.S. Kurekin, A.S. Gavrilenko, A.Ya. Matveyev, D.M. Bychkov (§7.1); V.N. Tsymbal, A.S. Kurekin, A.S. Gavrilenko (§7.2); S.Ye. Yatsevich (Appendix 1); A.P. Yevdokimov, V.V. Kryzhanovsky (Appendix 2). The authors who have readily consented to make valuable contributions to this book constitute an expert team of researchers and design engineers who are currently with the following institutions: Kalmykov Center for Radiophysical Sensing of the Earth of the NASU and NSAU, A.Ya. Usikov Institute for Radiophysics and Electronics of the NASU, Radioastronomical Institute of the NASU and the Design Office "Yuzhnoye". UDC 621.396.96'06 R13 Radar Techniques and Facilities for On-Line Remote Sensing of the Earth from
Aerospace Carriers / A.G. Boyev, V.B. Yefimov, V.N. Tsymbal at al.; edited by S.N. Konyukhov, V.I. Dranovsky, V.N. Tsymbal. – Kharkov (Ukraine): Publishing house Sheynina O.V. – 2010. – 428 p.
ISBN 978-966-1536-57-8

3 TABLE OF CONTENTS
Page FOREWORD........................................................................ 5 CHAPTER 1. THEORETICAL FOUNDATIONS AND DISTINCTIVE FEATURES OF RADAR TECHNIQUES AND FACILITIES OF REMOTE SENSING OF THE EARTH………………………………..................................
14 Introduction............................................................................................................ 14 § 1.1 Radio wave scattering by sea surface………............................................... 16 § 1.2 The influence of surface-active films on radio wave scattering by sea
surface ..........................................................................................................
26 § 1.3 Microwave radio wave sea ice scattering …………………........................ 42 § 1.4 Features of land surface, vegetation and soil scattering at microwave
band....................................................................................................
58 CHAPTER 2. AEROSPACE RADARS OF ON-LINE REMOTE SENSING OF THE EARTH…………………………………………………..………….....
86
§2.1 The basic operating features of the EOS "Cosmos-1500" SLR..................... 104 §2.2 Airborne radar complexes for remote sensing of the Earth........................... 110 §2.3 The criterion for informative characteristic properties offered by remote sensing radar systems........................................................................
130
§2.4 Calibration features of air- and spaceborne SLR and SAR systems for on-line environmental monitoring of the Earth……….....................................
137
§2.5 The distinctive features of on–line data processing aboard the satellite -based SLR of the “Cosmos-1500” type and airborne multifrequency radar complex “MARS”………………………………………………….............
152
CHAPTER 3. ON-LINE RADAR REMOTELY SENSED AEROSPACE MONITORING OF THE WORLD OCEAN………………………….................
179
§3.1 Monitoring of the hazardous processes in the ocean-air system…………… 179 §3.2 Determination of the near-sea surface wind field parameters from radar
images of the ocean surface…..……………………………........................
197 §3.3 Tropical cyclones, hurricanes, typhoons….................................................... 206 §3.4 Comparison between remotely sensed radar data and in-situ measurements.
Estimation of validity of definition of the near-sea surface wind field parameters from radar data…………..........................................
215 §3.5 Widespread effects of hazardous atmospheric processes in coastal areas and
inland seas ………………………………….........................................
219 §3.6 Use of multifrequency radar data for monitoring of the aroused sea surface
state...............................................................................................................
226 CHAPTER 4. ON-LINE RADAR SEA ICE MONITORING. ENSURING THE NAVIGATION SAFETY IN ICE CONDITIONS...............................................
228
§ 4.1 Experimental investigations into the signatures of microwave sea ice backscattering …………….……………….................................................
228
§ 4.2 The linkage between the characteristics of microwave radio signals scattered by sea ice and its physical-chemical and electrophysical properties………………………………………………………………….
240 § 4.3 Methodical features of thematic processing of the spaceborne SLR
information on the ice sheets…………..………………………………......
246 § 4.4 Remote sea ice diagnostics using spaceborne SLR facilities…..…….......... 248 § 4.5 Particular features of ice cover remote sensing by multifrequency radar
techniques………………………………………………………….............
260 § 4.6 Rescue operations aimed at salving the cargo vessel fleet using the data
from the EOS "Cosmos-1500" SLR.............................................................
265

4 § 4.7 On the arrangements that were made to salvage the research/expedition
vessel "Mikhail Somov" perilously jammed in the Antarctic ice…............
269 CHAPTER 5. ON-LINE DETECTION OF MANIFEST SIGNATURES OF SURFACE AND INTERNAL SEA PROCESSES USING RADAR TECHNIQUES.......................................................................................................
272 § 5.1 Investigation into the inhomogeneities caused by oil product spills............ 273 § 5.2 Studies of inhomogeneities arising in sea currents ……………………...... 288 § 5.3 Studies into manifestation of internal and seismic waves on the sea surface
……………………………………………………………………..
296 CHAPTER 6. ON-LINE RADAR MONITORING OF LAND............................ 298 §6.1. Determination of agrometeorological properties and soil moisture from
space radar images at the autumn-winter season…………………………. 298
§6.2 The study of the manifest indications of geological formations and mineral deposits using multifrequency remote sensing radars..................................
316
§6.3 Description of subsurface formation detection procedures using multifrequency sensing tools........................................................................
320
CHAPTER 7. ON THE ADVANCES IN THE DESIGN AND DEVELOPMENT OF RADAR SYSTEM FOR ON-LINE MONITORING OF THE EARTH'S ENVIRONMENT........................................................................
327 §7.1 Description of the initial results achieved in the operation of the airborne
remote sensing complex, otherwise referred to as the "ARSC-30"..............
327 §7.2 The prospects for further development of spaceborne radar facilities for on-line remote sensing of the Earth in Ukraine. In lieu of the conclusion…………..
338
References….......................................................................................................... 341 APPENDIX 1. INTEGRATION OF DATA ON AEROSPACE RADAR SENSING AND IN-SITU MEASUREMENTS INDUCTED IN NATURAL TESTING AREAS………………………………………………………………
356 References to the Appendix 1 .......……................................................................ 391 APPENDIX 2. FEATURES OF THE ANTENNA SYSTEMS OF EOS PERSPECTIVE SPACE RADARS.......................................................................
393
§1. The high resolution antenna system of the space SAR with the on-line beam control.............................................................................................................
393
§2. The multipurpose antenna system of multimode space side looking radar................................................................................................................
412
References to the Appendix 2............................................................................... 425

5
Dedicated to the memory of Anatoly Ivanovich Kalmykov,
the eminent scientist FOREWORD
Dear reader, The book you are now holding in your hands is dedicated to radar techniques and
facilities for on-line remote sensing of the Earth. We would like to give some brief explanations to those who are actually getting interested in this aspect of human endeavor, which is of certain value and captivates one’s imagination. Remote sensing is a sort of technology. To be more specific, it is a combination of methods and ways of extracting information on a great variety of man-made and natural objects phenomena and processes occurring at a certain distance when there is no immediate contact with them.
At present some useful information on remote sensing applications can be gained from distinctive features of different-in-length electromagnetic (EM) waves reflection both from objects to be studied and from those of intrinsic radiation of EM waves by these particular objects.
The remote sensing systems based upon artificial radiation and reception of EM waves reflected from the objects being explored that are referred to as “active”. They include, above all, radar, lidar (optical wave bands, in most cases, with adjacent UV and IR regions) and sonar (or sound) wave bands. The systems that are exclusively based upon receiving EM waves radiated (or re-reflected upon irradiation by some natural illumination source like, say, the Sun) by the objects under study are called “passive”. Among those are the photographic systems intended for registering the reflected solar radiation as well as the various types of radiometers having different wavelengths. The spectrum of EM waves in remote sensing applications is rather wide. It varies from the shortest X-ray wavelengths of 10-12 m and UV optical-range waves to ultrasound and acoustic wavelengths of more than 104 m.
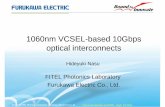
Some general concept of EM radiation bands used in remote sensing is depicted by Fig.1 [1], in which EM wave spectra are shown to be radiated by a black body at its different temperatures and by the Sun as well. Here a comparison is made between the spectral characteristics of EM radiation transmitted by the Earth atmosphere and the EM wave bands utilized by different remote sensing systems.

6
Fig.1.1. EM wave spectra radiated by a black body at its different temperatures and by the Sun; spectral characteristics of EM radiation transmitted by the Earth atmosphere and the EM wave bands utilized by different remote sensing systems
It is clearly seen that one could hardly find all portions of EM wave spectrum to
be equally suitable for remote sensing applications. We will give the information relevant to the above Figure in subsequent sections.
Needless to bring home to anyone living at this modern age the paramount importance of remote sensing technology, to those who think it normal to see for themselves the tangible results it yields every day, especially when televised weather forecasts are presented. This is most convincingly evidenced by the wide-ranging applications of remote sensing in every areas of human endeavor, by the efforts and resources put into it by highly developed and developing countries round the world. Most of the resources and allocations are mainly focused on air-and spaceborne remote sensing systems
And no wonder that it is exactly the aerospace facilities for remote sensing of the Earth (RSE) that are basically intended to resolve the issues of global monitoring of the processes occurring on the Earth and which are in fact challenging to get them under control using ground-based facilities only.
A wide variety of problems that have to be addressed by the present-day aerospace remote sensing facilities ranges from military reconnaissance operations to prevention of natural, technogenic and environmental catastrophes, rescue of personnel, mineral prospecting in any parts of the Earth, to name but a few.
An incomparable role is played by the remote sensing facilities while observing the hard-to-reach and outlying areas of the globe, i.e. deserts, vast oceanic expanses, Arctic and Antarctic regions. This diversity of problems to be tackled requires that remote sensing air- and spaceborne facilities be dedicated to serving specific purposes. In other words, priorities should be given to selecting the types and physical principles of their operation, their parameters (in particular, swaths, spatial resolution, the data processing period and presentation of data, the mode of delivering the retrieved data to users, etc.) in strict

7 compliance with specific features of issues being solved. In fact, it does not seem to be difficult to make sure that various problems are optimally handled by selecting totally different sets of remote sensing facilities.
As an example, consider one of the gravest issues like natural catastrophes. The most calamitous natural phenomena are the so-called tropical cyclones or, in other words, typhoons and hurricanes. They possess a formidable breakout force. The wind speed in their epicenter may at times be over 150 km/h. They are bound to cause horrifying ocean waves and are attended by torrential rains, thereby leaving flooded areas, landslides, etc. in their trail. They sweep over the areas for a distance of hundreds of kilometers and are capable of traveling along complicated trajectories at high speeds that often reach 100 km/h. A huge number of innocent people are often victimized by tropical cyclones, thousands of vessels find themselves sunken and heavy material damages are inflicted. In spite of the great engineering potential of today all these hazardous events cannot but pose a colossal threat to numerous countries around the world. It is quite evident that the measures taken to minimize the aftermaths of tropical hurricanes may well be effective provided one should take care of their timely detection using the reliable data on their imminent danger, their direction and the speed with which they travel. Of course, these data are to be made available in good time and on a 24-hour basis and keep one informed about the atmospheric processes over the vast oceanic expanses stretching for tens of millions of square kilometers, where these hurricanes tend to originate. This problem can hardly be tackled without having to fall back upon the wide–swath spaceborne global remote sensing systems which are supposed to operate continually, round-the-clock, because the movement of hurricanes is never discontinued night and day.
The data thus obtained should be promptly dispatched to a large number of users ranging from the special state-run emergency services that organize and coordinate rescue and evacuation operations in the hardest-hit areas to the captains of ships and numerous owners of small-size motor boats and yachts which might to get caught in hurricane-affected zones. The rate at which the radar data are delivered to those who may fall victims to those elemental events is very essential in terms of salvaging dwellings and properties. Therefore the best solution would be to process the remote sensing data on a real-time basis, directly onboard the man-made satellites of the Earth. Apart from the onboard radio channels being utilized to give operational warnings of emergency situations in the open sea, the data retrieved could be transferred, say, through the APT standard channels. The receiving stations of these channels are of significant current use. Thousands of these stations are being run all over the world.
Thus, even if some features of tropical cyclones, typhoons and hurricanes are given a cursory glance, one is practically able to specify the basic requirements for spaceborne systems which are intended for their operational monitoring, i.e. for their prompt detection, diagnosis of their parameters, monitoring of their development and movement. Basically this implies the global surveying of the ocean surface, the capability of daily (regardless of light conditions) detection of the most active processes in the air-sea system in their early stages of development with a subsequent monitoring of their dynamics and diagnosis of parameters. This also highlights the capability of processing remote sensing data directly onboard a spacecraft on a real-time basis and a swift transfer of data to a great number of users.
Meanwhile, when analyzing other environmentally related processes such as degradation of fertile soils, desertification or the causes behind deforestation in many parts of the world, one has to come up with totally different remote sensing facilities. Although these processes are of global nature, they tend to develop gradually, their time range running into decades.

8 In others words, the areas susceptible to these hazardous events can be surveyed
at a slow rate, stepwise, and no operational mode is then needed. These particular processes reveal themselves in a great diversity (for instance, in changing the color index of forest tree foliage, the growth of frees, their structure, the composition and color of soil covers, compactness of grassed soils, etc.). Therefore, different remote sensing facilities are needed to monitor their dynamics and there is no point in hastily selecting optimal surveying conditions to be applied to each of these facilities. The raw data retrieved from this type of sensing can be transferred to a limited number of research centers for subsequent integrated processing of data to be utilized after a little while.
The disastrous events also differ in the scopes of their manifest effects produced by elemental processes, in the rate at which they gather their momentum, etc. For instance, the oil spilled across the sea surface is initially spreading fast in response to the surface tension forces and the due to the displacement of sea currents and wind velocities. Therefore the spaceborne remote sensing facilities taken alone, on frequent occasion, appear to be rather insufficient to provide effective monitoring of the above technogenic catastrophes. It is then indispensable to make use of airborne remote sensing systems capable of updating the information on how the hazardous events develop within a short span of time by means of repeated observations.
It stands to reason that it is impossible to give meticulous attention to a great diversity of remote sensing systems and techniques in a single book. Here we will consider the specific features of on-line remote sensing facilities involving the use of aerospace carriers, and a special emphasis will be placed exclusively upon satellite-based radar systems. The reasons why the afore-mentioned radar systems are worthy of note are as follows.
First, they offer the optimum performance in terms of meeting the requirements for a speedy acquisition of data irrespective of light conditions, the time of day, cloud canopy, etc.
Second, they allow one not only to keep track of how different natural and technogenic catastrophes manifest themselves, but also to promptly evaluate most essential parameters relevant to those phenomena and events which are most likely to be responsible for the dreadful consequences they entail. Take, for example, the near-sea surface wind velocity, the torrential rains brought about by tropical cyclones, age gradations and respective thickness’ of sea ice, the oil film thickness on the sea surface, etc. To put it in a nutshell, basically it is difficult to overestimate the importance of the operational capabilities of remote sensing radar facilities. We will dwell upon them in subsequent sections.
Third, the remote sensing experts of Ukraine have a backlog of expertise associated with efficient developments of low-cost but high-performance aerospace remote sensing systems and are widely experienced in their applications.
In the light of what was stated above we think it unfair to leave the foregoing description of the possibilities offered by remote sensing radar facilities totally unfounded. Therefore we would like to cite just one illustrative example so as to convince our readers of the excellent benefits derived from remote sensing applications. Imagine the following situation: October 1983, the northern coast of the Chukot region, the polar, dark nights with severe frosts and blizzards fall upon this snowy desolate area. Also as well as every year a convoy of 22 vessels ploughs its way through the Arctic ice to the port of Pevek when following the well-trodden route. Normally the vessels are loaded with provisions, fuel and other supplies the Chukot inhabitants need so badly. The polar explorers, geologists, builders and their families will never endure the rigours of a dreadful arctic winter if they run dramatically short of life-support supplies at the most critical, hardest period of time. If one wishes to sound ironical, the convoy was “a bit” late.

9 It was held up for about a month because of some typical hitches in preparatory
operations. Everybody hoped for the best. But, helas, the outcome turned out to be deplorable. All of a sudden the heavy masses of multiyear near-polar ice floes started moving southward, and the convoy got hipped in the Longa strait to the south of the Wrangel Island.
And soon the most powerful atomic ice-breakers were seen to be heading for the distressed vessels. But the multiyear ice, whose thickness was 5 meters and up, was a really “hard nut to crack”. In the long run everything ended up in a tragedy. One vessel was mercilessly crushed by the ice and sank and the other was badly damaged. The icebreakers were strenuously attempting to get through; even the propeller screws have broken down but to no avail. A menace hanging over that area with a population numbering hundreds of thousands might become a grim reality.
The high-ranking officials of the Former Soviet Union (FSU) felt gravely concerned about the fate of the convoy in question. The top executives who were responsible for the safe and effective navigation in the Arctic region were closely watching the developments. The loss of the ships whose cargoes were estimated at over 8 billion $ dollar might be thought of as an enormous tragedy and, should it happen, new challenging problems would come cropping up and that would incur additional expenses. In particular, thousands of people would have to be airlifted from those far-flung areas of Chukot, since they were on the verge of being abandoned with no provisions and fuel supplies so necessary to keep the region infrastructure going under those unbearably severe conditions. The data provided by the airborne ice reconnaissance were far from encouraging. It seemed like the ice wilderness was never-ending with huge floes stretching far beyond the horizon, which was in fact impossible to cut through.
Just at that time the leading experts of the FSU State Committee for Hydrometeorology (“Goskomgidromet”) of the USSR), the “Yuzhnoye Design Office and the Institute of Radiophysics and Electronics (Kharkov) of the Academy of Sciences of Ukraine were actively involved in preparations for the planned orbital testing of the remote sensing radiophysical equipment installed onboard the “Cosmos-1500” satellite that was launched in September, 28, 1983. This experimental complex was designed and developed by the Ukrainian researchers and experts of the IRE (NASU); Special Design Office of the IRE NASU and the Special Design Office Marine Hidrophysical Institute (NASU) under the supervision of Prof. A.I. Kalmykov. The key component of the entire remote sensing system was the side-looking radar (SLR), which played a dominant role.
Here it would be worthwhile to touch upon the background of development and launching of the “Cosmos-1500” satellite carrying the first-ever homemade spaceborne remote sensing SLR. The whole story appears to be exciting and leaves one greatly amazed. There was a lot of controversy and arguments over this project, which occasionally stirred up strong feelings, sparked off heated discussions to such an extent that the whole thing looked very much like a “Whodunit”. We will take up that story and give it a careful consideration later on.
Setting aside all the arguments, all sorts of statements and reasoning that were prevalent at that time, the main thing remained extremely essential: the SLR “Cosmos-1500” had been engineered using the physical principles of radio wave scattering by the aroused sea surface and, more importantly, these effects were revealed and studied by the Ukrainian radio physicists and the entire remote sensing arrangement was primarily developed by the Ukrainian experts only, and it is this particular contribution of the home team of engineers and researchers that caused a great deal of displeasure on the part of some opponents.
And it is precisely at that crucial spell of a trying time when the cargo ships bound for the Chukotski Peninsular (Chukot) were in distress and on the point of sinking,

10 and everybody nerved themselves to stand physical and emotional strains that the SLR long-term testing was to start as planned. The trial procedure envisaged the radar surveying of the same, specially chosen, sea surface area near the African coast under the most diverse conditions, involving the ground-controlled facilities.
In these circumstances Prof. A. I. Kalmykov who was given an unqualified support by the “Yuzhnoye“ Design Office Managerial group did his best so as to immediately suspend the scheduled orbital testing of the SLR facility and to allow it to "zero-in mission" a routine surveying of the ice-bound ships in the Longa strait.
In those years it was next to impossible to act that way because of the strict rules and regulations existing in the FSU. Those who were well aware of them knew it was almost inconceivable to reverse the decisions made by the top space executives). Indeed, the first radar images of this area could effectively show the way to rescue the ice-bound convoy. If one takes a closer look at these images shown in this book he is bound to see it for himself. At the same time it just dawned upon the physicists in Kharkov: the disaster area did seem to be "besieged” by heavy ice near the Northern coast of Chukot. Meanwhile, at a distance of 100 km to the north of the Wrangel Island there was a vast zone covered with thin ice (The so-called “polynia, i.e. an unfrozen patch of water in the midst of an ice-bound sea), which could open the clear way to the long-suffering convoy. The radar images that had been previously acquired helped to discern the fissures and patches of ice-free water in heavy multiyear ice oriented southward. These fissures ran along the “polynia” near the Wrangel Island.
After these unique data had been collected it took several days to make desperate moves in an effort to get the top managing executives responsible for the Navigation in the Arctic region (“Sevmorput”) to call their attention to those gruesome developments. And it was until after the threat to lodge a complaint with the Central Committee of the Communist Part of the USSR (now FSU) had become a tangible reality, those appeals did take effect. To be on the safe side, a decision was made to make sure that the SLR space-borne data were adequate. The aircraft involved in visual ice reconnaissance, which had hitherto been flying in the vicinity of the convoy and along the Chukot coastline were searching out the slightest fissures in ice floes, along the traditional route have been directed northward (to the area spotted by the SLR), right up to the Wrangel Island. To the greatest surprise of the ice reconnaissance experts who were committed to provide pilotage operations, the SLR data were ultimately confirmed. As a matter of fact, in the area detected by the SLR a zone of young ice could be easily seen. True, within several days that had elapsed since the “polynia” was detected from space, the ice inside it got somewhat solidified, but fortunately it kept quite suitable for free passage of the convoy. The patches of ice-free water stretching out as far as that zone were found in the hummocked ice fields. The convoy promptly altered its course and headed northward.
As the fleet of cargo ships followed the ice-breakers, it soon succeeded in getting closer to the young ice zone and sailing further on it safely arrived at the port of Pevek in a few days’ time. Thus, the cargoes being worth 8 $ billion were salvaged and the population of Chukot could well go on living through the climatic whims of that outlying land. It was convincingly demonstrated that the spaceborne SLR on the “Cosmos-1500” satellite was extremely practicable in securing the high-latitude navigation safety.
It should be noted that this assertion is far from groundless. The point is that most of the leading remote sensing experts in the FSU were vigorously opposed to the novel development such as the SLR of the “Cosmos-1500” system, since they believed it to be totally unpromising and frequently insisted that this project be abandoned for good and all. But those who were seriously anxious to go ahead with the work on creating and launching the advanced system were on the winning side.

11 At any rate, the SLR of the “Cosmos-1500” satellite was designed and developed
in line with the concept of the operational spaceborne system, which was intended to avert natural calamities as a prototype of one of the principal components of this integrated facility. Basically this concept was assumed to lean upon low-cost and highly efficient remote sensing system. It is fundamentally different from the hitherto predominant ideas of what such spaceborne systems had looked like.
It was owing to the uncompromising stand taken by Prof. A. I. Kalmykov and his colleagues, the far-sightedness shown by the management of the “Yuzhnoye” DO as well as by the Department of Hydrography of the Naval Forces of the FSU that this exceedingly valuable development was not discarded. Rather, those who had claimed it would serve no useful end backed off and gave the go-ahead for the launching of this project.
Yet another most striking example of using the SLR facility (the public at large was almost unaware of) was its evident usefulness in preventing the large-scale environmental disaster in the Dnieper basin.
The spring of 1988 in Ukraine betokened fast and vigorous snow melting, because the preceding winter period had brought off heavy snowfalls and, according to some experts, the thick snow pack thus formed might cause heavy floodings. In order to forestall the possible failures of the hydrotechnical facilities on the Ukrainian rivers a decision was made to drain the water not only from the storage reservoirs but also from the man-made storages of the Dnieper cascade.
And while these steps had been swiftly taken in the Eastern regions (which unfortunately resulted in the massive death of fish and inflicted heavy damages), nobody made a venture to drain the water from the Kiev man-made sea. The reason why it did not happen is quite evident: the waters of this enormous reservoir was saturated with radioactive nuclides following the Chernobyl disaster. Had the waters be drawn off, the contaminated compounds would have been brought upwards by the water streams and dispersed over the entire Dnieper basin and the carried away up to the Black Sea maritime zone, which would have entailed the gravest consequences.
There was a bit of wavering among the experts of the “Goskomgidromet” of the FSU (the State Committee for Hydrometeorology of the FSU) and at long last they suggested that the dynamics of snow pack melting be monitored using the spaceborne SLR.
A short time later certain arrangements were urgently made for the delivery of data from the SLR of the “Cosmos-1766” satellite twice a day (the SLR had already been placed in orbit by that time). Fortunately, due to this monitoring the snow melting rate was shown to be far below the predictable one, and the overflowing of those artificial water storages was not expected to occur. This procedure led one to give up an idea of having the Dnieper cascade water drained, thereby avoiding the environmental catastrophe. A similar snow melting monitoring procedure was successfully performed by the National Space Agency of Ukraine in the spring of 1996 by means of the SLR onboard the first Ukrainian man-made satellite “SICH-1”.
Below we will give a detailed analysis of the then situation and experience gained in developing this unique system and describes some spectacular results achieved with the above system. The only point we would like to make is that the rescued vessels in the Longa Strait and prevention of the ecological disaster in the Dnieper basin were in no way the only “resounding” achievements that we owe so much to the SLR of the “Cosmos-1500” /”Okean”/ “SICH” satellites. This radar facility has played a crucial role in rescuing the research ship “Mikhail Somov” nipped in the Antarctic ice in 1985, and in monitoring tropical hurricanes, floods, large-scale oil slicks, etc.
The data that were downlinked from this system were utilized to provide for the safe navigation in the Arctic region and to keep track of special-purpose operations of the

12 Naval Forces of the FSU. In addition, a formidable amount of unique scientific data was gleaned by means of the afore-mentioned systems.
The concept behind the “Cosmos-1500”SLR has proved to be so appropriate that this academic prototype was put into full production and the only entity that had taken care of developing these particular space products was the DO “Yuzhnoye” which had been involved with this project for more than 20 years. The primary design versions of this in-house facility remained practically unmodified. In 2005 the National Space Agency of Ukraine launched an updated EOS SICH-1M SLR that was to be operated in a more extended swath width mode and incorporating an advanced onboard data handling system
To date a good deal of experience has been gained with designing the spaceborne remote sensing facilities. The optimal operational results have been demonstrated by the splendid performance of the ERS-1, ERS-2 SAR designed and developed by the ESA (European Space Agency); of the Canadian-made RADARSAT SARs and the ENVISAT SAR developed by the collaborative effort of US and EU companies. The multifrequency SAR on the US reconnaissance “Lacross” satellite offers the spatial resolution characteristics that leave one tremendously impressed. The above remote sensing radar systems, even if they involve extremely high costs, are worthy of great praise. In fact, they are capable of delivering a huge amount of various data products to a broad and diverse user community, especially when one is keenly interested in the natural environment of the Earth.
Meanwhile the worldwide remote sensing experts are becoming increasingly convinced that although these SARs have demonstrated the excellence of workmanship, and great performance capabilities it seems impossible to regard them as the basis for creating the high-performance system for worldwide prevention and monitoring of natural disasters. This system, if implemented, is certain to incur great costs and be bulky in structure.
In recent years modern remote sensing experts keep coming up with new requirements for those components of the system in question, which are surprisingly identical to those previously specified by the group of researchers and engineers led by Prof. A.I. Kalmykov. The conception he had framed more than 25 years back was focused on developing the operational spaceborne systems capable of preventing natural catastrophes and critical situations. His overriding idea sounded as follows: it is necessary to use cheap but highly efficient dedicated remote sensing systems with optimally selected parameters, onboard real-time data processing and the delivery of data products directly to the broadest user community.
Apart from the spaceborne remote sensing facilities, the Ukrainian specialists have been riveting their attention on developing airborne complexes for remote sensing applications (ACRS).
They have designed a series of such facilities which are primarily intended to optimize novel remote sensing techniques. Their operation was found to be a success in many practical applications. The most spectacular data had been retrieved by the multipurpose radar complex - MPRC “MARS” that was designed and developed under the supervision of Prof. A.I. Kalmykov. This complex incorporated Ka-, X-, L- and VHF-band systems. This combination of frequency bands has allowed resolving a wide range of scientific and applied issues relevant to ice reconnaissance and environmental monitoring, mineral prospecting, subsurface sensing, etc.
At present the expert teams of the Kalmykov Center for Radiophysical Sensing of the Earth (of the NASU and the NSAU) as well as the Scientific Center for Aerospace Researches of the Earth under the auspices of the National Academy of Sciences of Ukraine and the Antonov Aviation Research and Design Bureau have engineered the modern airborne complex for remote sensing of the earth (ACRS-30). This complex is mounted on

13 an AN-30 aircraft belonging to the Ministry for Emergencies of Ukraine. It incorporates the capabilities of radar, IR and optical remote sensing systems. Its informative potentialities are basically aimed at detecting and preventing natural and technogenic catastrophes and critical situations.
The authors of the book would very much like to stimulate the readers’ interest, particularly those who are actually concerned with remote sensing issues and have a natural urge to look into the history and prospects of science and engineering.
We also think it fit to shed some light on the real contribution the Ukrainian researchers and experts have made to the evolution of the systems and aerospace sensing techniques.
This is because, in our view, the remote sensing community was poorly informed of what has been achieved in this particular field of radar applications because of the so-called “information blockade” that had been maintained for quite a while.
In this book particular attention is given to analyzing some theoretical principles and features of radar remote sensing techniques, constructing operational aerospace radar remote sensing systems and reviewing the most spectacular scientific results obtained with the aid of the systems such as the SLR of the “Cosmos-1500” / “Okean”/ “SICH” satellites type, the MPRC of MARS and ACRS-30 series, etc). Special consideration is given to the prospects of developing new operational aerospace remote sensing systems.
We will be grateful to all those who will get to know with the findings of our multiyear studies and the developments that are briefly outlined in our book.

14
CHAPTER 1. THEORETICAL FOUNDATIONS AND DISTINCTIVE FEATURES OF RADAR TECHNIQUES AND FACILITIES OF REMOTE SENSING OF THE EARTH
Introduction Chapter 1 gives a brief outline of the theoretical principles and physical
characteristics of radar techniques and the related systems for remote sensing of the Earth (RSE). In this context, as contrasted to the Chapters that follow, this particular section of the book is heavily "interlarded" with mathematical expressions that describe the physical mechanisms of radio wave scattering by the rough sea surface, ice sheets or ice floes and near-surface soil layers.
It is highly important to gain a deep insight into these features both in developing the RS systems and adequately interpreting the results obtained. An experience that has been acquired over many years strongly suggests that a radar RS system of whatever arrangement is required to incorporate thoroughly studied basic principles that have to be allowed for. Otherwise, unless all the above features are not taken into account this system is bound to meet with an operation failure and its performance will be far short of optimum.
In our view, a reader who is not knowledgeable about and unconversant with this particular topic may skip this chapter and get down straight to scrutinizing the real results that were obtained through the use of space- and airborne RS facilities designed and developed by Ukrainian experts. However, in order to get a better understanding of specific performances of operational hardware and the techniques for its optimal (in terms of allowable trade-offs) selection and deliberate estimates of attainable results it would be advisable to take a closer look at the major conclusions of Chapter 1.
It is well-known that the primary purpose of radars that had been designed and developed was to address war-oriented issues, specifically, to detect air- and seaborne targets regardless of visibility conditions. However, an extensive use of radars during the World War II had later on shown that, apart from the sought-for target-backscattered signals, one might as well observe a host of "spurious" signals echoed from flocks of birds, land and sea surfaces, etc. Examination of these "spurious" reflections that interfered with detecting military objects allowed one to extract some exciting pieces of information. Of particular interest were the effects resulting from radio waves being reflected from a rough sea surface. In this context it should be noted that, as radar engineers made recourse to a higher-frequency portion of the microwave (MW) radio wave spectrum, still more interesting effects made themselves evident in sea surface sensing. A surprising thing was that, on the face of it, the sea surface did not exhibit any new formations capable of intensively reflecting radio waves. Yet, as a contrast, the land objects like buildings, trees, etc. are oriented perpendicular to irradiating radio wave so that they are capable of reflecting a considerable fraction of incident radio wave energy back to a radar.
It was owing to the efforts made by world-wide researchers that by the end of the 50-s a mechanism was disclosed for short- and medium-wave scattering by the rough sea surface, and general regularities and relations of the scattered signal characteristics to sea surface parameters had been established. A major role in this research was played by the Ukrainian scientists of the Institute for Radiophysics and Electronics of the NASU. The scientific activities were supervised by Prof. S. Ya. Braude who had succeeded in shaping a new research lead referred to as "radiooceanography" [2].
While the researchers were to calculate and describe the energy, frequency and spectral characteristics over the high frequency (HF) wave band in terms of the selective-scattering mechanism based upon the small-perturbation method, the problem of

15 microwave sea-surface scattering remained unresolved. A number of attempts by some scientists in the West at using artificial "droplet- or facet-like" models in an effort to adequately interpret experimental results did not allow the quantitative characteristics of microwave scattering to be unambiguously related to real sea roughness parameters.
The pioneering experimental work on gaining a more penetrating insight into the specific features of microwave scattering by the rough sea surface was carried out by an excellent team of the IRE of the NASU scientists under the supervision of Professor I. Ye. Ostrovsky - A.I. Kalmykov, A.D. Rosenberg, V.I. Zeldis and others [3-7]. They had analyzed the Doppler spectra of sea surface-scattered multifrequency radio signals and argued for the resonance nature of scattering processes. In addition, of great significance were the theoretical developments by Professors F.G. Bass and I.M. Fuks [8] who were able to devise the so-called "two-scale scattering model" based upon the physical notion of a scattering surface as two-scale irregularities (i.e. conceptualized small-size roughness to which the perturbation analysis is applicable and large-size roughness the reflections from which are treated in the Kirchhoff approximation.
It was shown that the radio wave sea surface scatterers are the sea waves whose lengths are given by:
Θ
λ=λ
sin2W (1.1)
These waves give rise to reflections with a Doppler shift when the sea state is low:
330 /sin16/sin ρλΘπα+λπΘ= gf , (1.2)
where is the gravitational acceleration; g α and ρ are the surface tension coefficient and the water density respectively; Θ is the incidence angle; the scattered signal spectrum with a slight sea roughness is narrow 1.0ff 0 ≤∆ ; as the sea roughness gets stronger, the
spectrum width increases proportionally with TH ( H is the height; T is the period of big waves).
Theoretical calculations were used to relate the basic energy scattering response, i.e., the normalized radar cross-section to the sea state parameters and the observation conditions:
0σ
)(),,(16 40WkFpГk Θ=
rεπσ , (1.3)
where Wk λπ2= ; is the spectral density of scattering ripple; )F(kW ε is the
permittivity of sea water; pr is the polarization vector. Expression for ),,( ΘpГ rε in the
general form is rather cumbersome, provided that 1>>ε at ε/1cos >Θ :
Θ4cos - for horizontal polarization
=ΘΓ 2|),(| ε
⎛ ⎨⎝ 222
22
1
42
]cos)cos1[(cos||
Θε+Θε+Θε
- for vertical polarization
where ε=ε+ε 21 i

16 The influence of big wave leads to amplitude-frequency modulation of a scattered signal and we then have:
∫∫ Θ=⟩Θ⟨=Θ γγωσσσ γγd)()()()( 00 , (1.4)
where is determined in (1.3) whereas )(0 Θσ )(γω is the high-wave slope distribution. The theoretical and experimental studies that were made in joint effort by
radiophysics experts in Kharkov (Ukraine) enabled one to get a better understanding of the nature of radio wave scattering by an aroused sea surface and made easier to adequately interpret and effectively draw upon the experimental data from radar sensing of the sea surface. The results thus obtained were highly appreciated by the world's community of remote sensing specialists who in 1969 were awarded a special Diploma of the antenna and wave propagation group of the IEEE (USA). The two-scale model they had developed by these experts has been extensively used worldwide in collecting remote sensing data on the sea or oceanic surface.
In the main paragraphs of this chapter we will examine some peculiarities of radio wave scattering in terms of the up-to-date concepts and the state-of-the-art models.
§ 1.1 Radio wave scattering by sea surface The sea viewed as a scattering object
Water, as it occurs in nature, is generally a solution of different mineral salts and offers rather high conductivity [9]. Therefore an electromagnetic field is capable of penetrating into it only to a small fraction of its proper wavelength λ [10]. For the sea water the penetration depth can be expressed as:
212108~ λδ −⋅ (cm) (1.5)
In view of the above condition, the sea's scattering properties are governed solely by the sea surface, its shape and state whenever one deals with the radio wave band that is commonly used in radar systems.
The sea surface is known to be in a constant dynamic interaction between the sea surface and the atmosphere, and, as a result, it leads to wind-generated surface-wave roughness. The wind speed and the space-time structure of the near-sea surface air current are in fact responsible for whatever sea state pattern. A relatively low viscosity and mobility of the air results in all its motions being practically turbulent [11]. The wind speed fields, all the magnitudes that describe its motion and state are, in essence, random and have their average fields and fluctuation fields. Here the aroused sea surface is also random with its space-time height and slope spectra [12]. The mathematic description of the sea surface statistical properties is based upon an concept of assuming it to be a superposition of random harmonic processes that fit in with a set of surface waves [12]:
wwwwK
ww dkdtrkikAtr ωωωςrrrrr )](exp[),(),( −= ∫ ,
},{ yxr =r (1.6)
Here we have:

17
wwwwwwwwww
wwwwwwww
kkkkAkA
kkkAkA
ωωωωω
ωωωω
′=′=Φ=′′
′′≠=∗
∗
,),,(),(),(
,,,0)','(),( '
rrrrr
rrr
(1.7)
where is the space-time spectrum of a random surface, the upper line in (1.7) above symbols shows the way of averaging.
),( wwk ωr
Φ
The space-related sea roughness spectrum is derived from (1.7) by frequency integration:
∫∞
∞−
Φ= wwww dkkF ωω ),()(rr
. (1.8)
The frequency spectrum is determined in a similar way:
wwww kdkrr
∫Φ=Ψ ),()( ωω . (1.9)
The frequencies and wave numbers of sea roughness are related to each other through the dispersion equation:
ραω )( ww gkk = , (1.10) /3ww k+
where α is the surface tension coefficient; ρ is the density of liquid; g is the free-fall acceleration. Owing to this relation the frequency spectrum can be re-calculated in terms of space spectrum. For example, with respect to gravitational range ( ) we have: ww gk=2ω
∫Φ=Ψπ
ϕϕω
ω2
02
3
),(2
)( dkg w
ww , (1.11)
where ϕ is the polar angle on the wave number plane, this angle being normally counted off from the upwind direction. Thus, the frequency spectrum (1.11) is given as an integral taken over all the wave directions at a constant wave number value.
The sea roughness spectra are generated with several mechanisms being involved such as wind pressure, viscous tension, normal pressure, wave interaction, etc. Each of these mechanisms may be dominant in one or another range of wave scales (gravitational, gravitation-capillary, capillary). As far as the developed sea roughness is concerned, the following expression was proposed by Pierson [13] to describe the space spectrum at different intervals of wave numbers:
,0,])(
74.0[exp)( 2
22
142
2
31∗
∗
∗
=<<−
=uukkk
uVkg
kakF m
www
w
,359.0),()( 2125
21
12 =<<= kkkkkakF www
,942.0)/)(()( 323343 =<<= kkkkkkFkF wq
ww (1.12)

18
,,)177.13/(
177.13/3)2(875.0)( 432/)1(3
21
4 kkkgkgk
gkgkF wp
ww
wpw <<
+
+=
+
−π
,,/10473.1)( 4
96345 wwmw kkkkukF <×= ∗
−
where km=3.63 cm –1,
,)]/log[/)](/)(log[ 323422 kkkFkFq =
.log0.5 ∗−= up
The relation of wind speed U at a height of with dynamic speed and roughness
height is given by:
z ∗u
0z ),/ln()4.0/()( 0zzuuU ∗∗ = сm /с
(1.13) ,1043.41028.4/684.0 225
0−
∗−
∗ ×−×+= uuz
12=∗mu сm /с As will be apparent from (1.12), the spectrum is dependent upon wind speed U in
its the longest-wave part only. In the short-wave intervals 2 and 3 these spectra are
not velocity-dependent. The limit of interval alone is dictated by the speed. These are the equilibrium spectra. A crucial role in generating one is played by the water surface resistance to breaking. Rather viscous tensions are actively involved in generating the short-wave spectra. Therefore, the spectrum dependencies and upon the dynamic speed are sufficiently pronounced. Fig.1.2 presents the wind speed values at a altitude of 19.5m as a function of dynamic speed.
)(1 wkF
1k
)(4 wkF )(5 wkF
For the short wave part of a less complicated expression may be employed [14,15]:
)(4 wkF
2/)1(22
2/)1(221
4 )]/1([)/31()2(875.0)( p
mww
pmwp
w kkkgkkkF
+
−−
++
= π (1.14)
The curves plotted for different values of the wind speed at an altitude of 19.5m
are shown in Fig.1.3. A characteristic which is essential for radio wave scattering is the mean square of
a wave slope for roughness surface ( )yx,ζ [12]:
gVkB
22 lg νζ =∇ , (1.15)
where , is the wave number of "viscous truncation". Fig.1.4 shows the mean square surface slope as a function of the wind speed. Curve 1 and open circles correspond to formula (1.15) and the experiment on a clear surface. Curve 2 and dark circles are for the thick film-contaminated surface [16]. The average angle of a disturbed surface slope increases, as the wind speed tends to grow and amount to around .
21046.0 −⋅=B νk
°13

19
Fig.1.2. The near-sea surface wind at an altitude of 19.5m as a function of dynamic speed
Fig.1.3. The short-wave part of sea roughness spectrum at different wind speeds
at an altitude of 19.5m; 1 - 4 m/с; 2 – 20 m/с; 3 – 30 m/с
Fig.1.4. The mean square of a rough sea surface slope as a function of the wind speed

20 A deeper insight into the surface wave slopes can be gained using the probability density of slope angle tangents γ [12]:
)(exp2
1),;(2
2
2
2
22x
x
x
x
xx
yxVWγ
γ
γ
γ
γγπγγ −−=
r, (1.16)
where 2
xγ and 2
xγ are the variances of slope angle tangents in the downwind direction (x) and in the crosswind direction (y). They are calculated from the sea roughness spectrum ( )ϕ,,UkF w , thereby yielding the following relations:
,),,(sin
,),,(cos
2/
2/ 0
222
2/
2/ 0
222
max
max
∫ ∫
∫ ∫
−
−
=
=
π
π
π
π
ϕϕϕγ
ϕϕϕγ
k
wwwy
k
wwwx
dkkVkFd
dkkVkFd (1.17)
where, as earlier indicated, is counted off from the upwind direction. According to formula (1.7) and below, averaging was assumed to be done over the statistical ensemble of random surfaces that could be realized under the conditions at issue (theoretical averaging). This type of averaging has to be performed using the probability density functional, which describes the probability of simultaneous occurrence of all surface point [17]. Determining this particular functional, even if the situations are the simplest ones, is a challenging problem from the mathematical viewpoint. To carry out experiments under real conditions the functional needed to average the probability densities remain unknown. Therefore, in actual practice use is normally made of averaging the empirical data over a certain time interval, space, or else a more general space-time averaging can be utilized:
ξτξτξτ 3),(),(),( dPtrfdtrf ∫ ∫∞
∞−
∞
∞−
−−=rrrr
, (1.18)
where ),( τξr
P is a certain weighting function that satisfy the normalization condition:
(1.19) .1),( 3 =∫ ∫∞
∞−
∞
∞−
ξτξτ dPdr
If function ),( τξr
P is different from zero in a certain four-dimensional region only and takes on a constant value inside it, then (1.18) converts into simple averaging over a finite space-time domain. For instance, in case the sea surface is being continuously illuminated we have:
⎪⎩
⎪⎨
⎧
Σ∉
Σ∈=
,,0
,,1),(
ξ
ξτξ
r
rr
yxLLP (1.20)

21
where is the "illuminated" sea surface area whose dimensions and are determined by the antenna pattern. Formula (1.18) then assumes the following form:
Σ xL yL
y
L
L
L
Lyxx
yx
x
x
yx
yx
dxxfdLL
yxf ξξξξ∫ ∫− −
++=2/
2/
2/
2/
),(1),( . (1.21)
As theoretical averaging over an ensemble of realizations is being replaced by actual space-time averaging, the practical mean values are supposed to tend to theoretical ones with an unlimited increase in space-time intervals. The verity of this statement can be rigorously proved in some particular instances (using the Birkhoff ergodic theorem). In most cases, it is accepted as a plausible hypothesis (an ergodic hypothesis is implied) [17].
In keeping with practical averaging, the fluctuations of a certain function are defined as:
),(~),(),(~ trftrftrf rrr −= . (1.22)
The above definition yields:
0),(~=trf r
. (1.23) Practical averaging (1.21) performed by a radar over the illuminated sea surface
brings about some changes in general theoretical concepts. This is exemplified by one-dimensional roughness using the Fourier-Stieltjes (1.11) integral to represent the sea surface. In view of (1.21) we have:
.)exp()(2/
2/sin)exp()(
))exp(1()exp()()(
2
2
2/
2/
∫∫
∫∫
−
∞
∞−
−
∞
∞−
≈
==
L
L
wwwww
www
L
Lwwww
dkxikkAdkLk
LkxikkA
dikL
dkxikkAx
π
π
ξξς
(1.24)
It is seen that an average surface to be surveyed by radar is a set of sea waves whose lengths are greater than an illuminated spot width:
L>λ . (1.25) As far as the surface height fluctuations are concerned, they are determined
(according to (1.10) by the waves whose lengths are less than an illuminated spot width. L<λ . (1.26) Thus, averaging that is automatically done by radar over an illuminated spot area
of the sea surface results in the sea roughness being divided into two parts – average and fluctuating ones. If the sea roughness spectrum contains the waves whose length are less than a typical size of an illuminated spot, then the sea surface is sensed by the radar as a plane, because
),,(~),,( tyxtyx ςς = и 0),,( =tyxς . (1.27)
In the case of a relatively intense developed sea roughness whose spectrum
contains the sea waves that are longer than the illuminated spot width, the sea surface will be picked up by radar as a sum of average and fluctuating parts:

22
),,(~),,(),,( tyxtyxtyx ςςς += . (1.28)
Since the maximum in the sea roughness spectrum is located in its low-frequency portion, the height of big waves specifying the mean surface is considerably greater than the heights of slower waves that determine its fluctuating part:
),,(~),,( tyxtyx ςς >> . (1.29)
This particular circumstance is also essential in terms of constructing the radio wave sea surface scattering theory. Radar sea surface scattering. The radio wave sea surface scattering theory is primarily grounded on a number of general mechanisms of the field theory. In conformity with the Huygens principle each point of a reflecting surface is a source of a secondary expanding spherical wave [18]. The conditions under which the secondary waves will be combined in phase at an observation point are heavily dependent upon the type of roughness and curvature of the surface.
a) sloping roughness (Kirchhoff scattering). An incident wave will respond to a curved surface as a local plane, if its typical
curvature radius exceeds the size of the first Fresnel zone, i.e. kR
)(cos
1
0
0
0 RRkRR
R k +>>
πθ
. (1.30)
where 0θ is the incidence angle counted off from the local vertical, λπ /2=k is the
wave number of radio wavelength λ , and are the distances from the reflection point to the radiation source and the observation points, respectively. Under these conditions radio wave scattering will be close to specular scattering at an incidence angle equal to that of reflection. In this case the back radio wave reflection can be made possible at reasonably small incidence angles only, because, as indicated above, the wave slope angles vary between and .
0R R
°10 °15b) Small-size roughnesses (resonance scattering). Small-size roughnesses are regarded as such when their size can be comparable to
or lesser than a radio wavelength. The overall pattern of scattering by such roughnesses can hardly be elucidated within the scope of geometric optics. It is exactly in this particular instance that the diffraction theory should be made use of.
The rough sea surface may be visualized as a set of planar diffraction gratings with "grooves" whose random spatial height distribution in periods is characterized by the sea roughness spectrum. The radio waves scattered by two adjacent grooves of one period will be combined in-phase at a remote observation point, if the total difference in incursion of their phases is a multiple of radio wavelength [19]. For example, provided that the radiation source whose observation and reflection points lie in the coordinate plane X, this condition can be expressed as:
...2,1,0,)sin(sin 0 ==− nnw λθθλ , (1.31)
where 0θ and θ are the incidence and reflection angles, respectively, being counted off
from the normal to the median plane, ww k/2πλ = is the spatial period of a scattering grate. It can be seen that when the receiver and transmitter positions are fixed, the radio

23 wave is apt to pick the waves of rigorously specified length out of the sea roughness spectrum. This scattering is referred to as the resonant or Bragg scattering.
Special attention should be drawn to the fact that the resonance condition (see expression (1.31)) is of vector type. It is used to select not only the length of a sea wave but also the direction of its front. In this particular instance the wave front is orthogonal to axis X. The resonance waves, in their turn, are randomly "indented" along the front with elevations and troughs. Therefore the total field brought in by the receiver from the entire illuminated spot (the middle field) will be equal to zero. The intensity of resonance wave- scattered radiation is determined simultaneously by in-phase electric and magnetic fields and will be different from zero, because it is not sensitive to the sign of surface deflection from the plane.
The value of n=0 in formula (1.31) corresponds to the specular reflection from the median plane Z=0, which is not radio wavelength-dependent. The value of n=1 in (1.31) corresponds to the main diffraction maximum, which, in terms of intensity, is strongly predominant over the higher-order maxima and, hence, expression (1.31) is virtually equivalent to the following relation:
λ=θ−θλ )sin(sin 0w . (1.32)
For backscattering 0θθ −= we can make use of (1.32) to obtain:
0sin2/ θλ=λ w . (1.33) An indicatrix of radio wave scattering by small-scale sea surface roughnesses is
dependent upon the type of the sea roughness spectrum. The gravitational-capillary part of the above spectrum is isotropic. So, scattering by such waves will be a diffuse one, because any incidence and scattering angles of radio waves will always be characterized by resonance harmonics.
c) small-scale roughnesses on a gentle irregularity (two-scale scattering). As discussed earlier, this situation fits in with the case where the sea roughness spectrum has the waves whose lengths are comparable to or greater than the size of the "illuminated" spot on the surface. The scattering indicatrix of such a surface will comprise two parts, i.e. a narrow-directional specular beam and the diffuse part of the resonance-scattered field. In contrast to the rough plane the incidence and reflection angles have to be counted off the local normal rather than from the vertical. The specular reflection mechanism (the Kirchhoff scattering) will be prevalent in the interval of small incidence angles (between ~
and ). This interval is governed by the slopes of heavy waves. The mechanism of resonance scattering will be the basic one in all other areas of incidence angles with the exception of small grazing angles at which the scattering elements are in fact the wave crests and their splashes. Besides, surface shadowing needs to be taken into account as well [8]. This case of radio wave grazing incidence will not be examined here, because it is not typical for remote sensing of the sea and Earth surfaces using aerospace facilities.
°10 °15
In exploring the radio wave scattering by a random surface having two types of irregularities, i.e. "small" ripples and heavy waves (their curvature radiuses exceed the first Fresnel zone), the perturbation theory is employed in conjunction with the tangential plane method [8,20]. In this case the sea surface is represented as a sum of middle surface S on which random roughnesses )(rrς are superimposed. The normal deflections )(rrς and
slopes ςγ ∇=rrr )(r of roughnesses relative to middle surface S are believed to be
sufficiently small: (k h ) 2<<1, |γ|2 <<1,

24
( h is the root-mean-square roughness height). For a reflecting medium with fairly large complex permittivity (CP) on a surface the Leontovich approximate edge conditions are held to be satisfied [8].
The intensity of backscattered radio radiation, which is inherently resonant, is described by a matrix of normalized radar cross-sections. This matrix is defined as:
20
2 )(/ 0000 PPP
PP
PPP EDREE
jiji=σ , (1.34)
where D is the surface area to be irradiated, R is the distance to a radiator, 0Pr
and are the polarization vectors of waves being incident and scattered in the direction j of waves,
is the electric field strength of an incident wave. The pointed brackets serve to denote averaging over the slopes of heavy waves
jPr
)( 0000 PEE P rrr
=
If i=j and vector 0Pr
is parallel to iPr
, then the received radiation has the same
polarization as an incoming one. Given i=j and jPPrr
⊥0 , the radiation is received at the polarization orthogonal to that of an incident wave. The elements of the normalized radar cross-section matrix at ji ≠ define the cross correlation of scattered-radiation components with orthogonal polarizations. An ultimate expression for the normalized radar cross-section matrix has the form [8]:
)()()(200
22
⊥Γ= qShkkl PPP
PPP jiji π
σ . (1.35)
where lh , are the root-mean-square height and the correlation scale of small-size
roughnesses, is their height spectrum, )( ⊥qS ( )γθ +=⊥ 0sin2kq (1.36) is the projection of the scattering vector onto the plane tangent to the middle surface. In (1.36) the angle of the of big wave slope is denoted by γ , whereas the radio wave's
incident angle is labeled by 0θ ,
,))(()~()(
)1~(2)(
))(()~()(
)1~(2)(
0
2
0
2
0
2
0
20
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
++−+⎟
⎠⎞
⎜⎝⎛
+×
×⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
++−+⎟
⎠⎞
⎜⎝⎛
+=Γ
PnPnabba
aPPba
a
PnPnabba
aPPba
a
jj
iiP
PP ji
rrrrrr
rrrrrr
εε
εε
(1.37)
where is the projection of the normal onto the middle surface in the surveillance
direction,
aε~ is CP of the environment; 21~ ab +−= ε
The vertical polarization of incident and reflected waves is currently in practical use, and these waves find their applications in EOS SLR of "Cosmos-1500"/"Sich-1/1M" type:
)()()(,1)()( 000 PnPnPnPPPP jiji
rrrrrrrrrr====

25 and using (1.30), (1.32) we get:
2
20
22
)()~()(
)1~(2⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
++−+⎟
⎠⎞
⎜⎝⎛
+=Γ⊥ Pn
abbaa
baa rr
εε (1.38)
and
)()()(2 22
⊥⊥⊥ Γ= qShkklπ
σ . (1.39)
Averaging performed by the receiver in (1.35) and then over the big wave slopes within the limits of an irradiated area is equivalent to integration with a certain distribution function (see 1.16). Therefore the averaged values of the normalized radar cross-section matrix can be found using the mean value theorem. Besides, the big wave slopes are small (see Fig.1.4), they may be ignored at sufficiently large incidence angles, thereby obviating a significant error.
As noted above, for incidence angles close to vertical ones the normalized radar cross-section is determined by the specular reflection from the elements of big waves (Kirchhoff scattering) [8]:
),;(4 4
420
yxz
K VWq
qNγγσ
rr
= , (1.40)
where is the Fresnel coefficient of radio wave reflection from the plane z=0 at a
vertical incidence [8],
0N
),;( yxUW γγr
is the two-dimensional probability density
distribution of big wave slopes (see 1.16), nkq Err
= , nr is the unit vector in the radio wave
incidence direction, and are its projections onto the vertical (Z-axis) and the XOY plane respectively:
zq ⊥q
0cosθkqz = , ϕθ coscos 0kqx = , ϕθ sincos 0kqy = , where angle ϕ is counted off from axis X directed upwind. The normalized radar cross-sections (1.35), (1.39), (1.40) are dependent upon a number of parameters that specify a reflecting medium (not only the sea). Specifically, these are: complex permittivity, spatial roughness spectra, etc. Additionally, they provide information on the properties of a scattering medium in the course of remote sensing experiments. The unknown parameters of a medium can be determined using equations (1.35), (1.39), (1.40) if their left-hand-sides are known experimentally.
The problem on determining one or the other scattering medium parameters from the radar measurements is multiparametric. Each concrete diagnostic operation offers some inherent features of their own and has to be supported through a particular experiment. Such an experiment should yield just as many equations (normalized RCS values) as unknown parameters of a scattering medium are to be specified. This requirement can be met through the use of multifrequency and multibeam surveying of one and the same terrain area.

26
§ 1.2 The influence of surface-active films on radio wave scattering by sea surface
Nowadays one of the primary objectives of sea surface monitoring that involves the use the special-purpose tools for remote sensing of the Earth (RSE) is to promptly detect and determine the parameters of the surface-active substances (SAS) spilt over the sea surface. These substances may be of different nature. However, of the most hazardous pollutants are crude oil and the products of its refining. Indeed, the annual oil production output in an offshore area may come up to tens of millions of tons and it tends to grow on an increasing scale. Millions of tons of crude oil are shipped by sea and the volumes of oil being transported are likewise on an increase. The process of oil production and sea shipment are often bound up with all kinds of accidents and catastrophes, which eventually results in nearly half a million of tons of oil products being annually spilt into the sea surface. These slicks are known to inflict an irreparable environmental damage both to the biota and littoral areas of different countries. Still vivid in everyone's memory are the ecological disasters caused by oil tanker accidents near the shores of Canada, France, Spain and elsewhere. Being fully aware of the fact that these catastrophes are most unlikely to be avoided in the foreseeable future, one of the top priorities is to streamline the techniques and means of controlling oil slicks. In this context the most essential point one has to focus on is to seek for operational detection of these spills and to determine their parameters such as the volumes of spilt oil, areas of slicks, direction and speed of their motion, etc.
It is a matter of general knowledge that the highly efficient facilities for the operational detection of these slicks on the ocean surface are remote sensing airborne and spaceborne radar systems. They offer a reliable, day and night capability to detect oil patches under any light conditions, in whatever remotest area of the World Ocean. Their initial goal is to detect and estimate a slick-affected area (i.e. the zone where the sea surface roughness is damped by the SAS effect) and in the course of follow-up observations they can measure the direction and the speed at which the oil slick tends to move around. Of a more challenging and as yet unresolved is the problem of quantitatively determining a film thickness and, consequently, the volume of a spilled SAS.
The materials set forth in the present part of the book are devoted to the theoretical development of the methods for handling the afore-mentioned problem by means of radar facilities.
Theory of "radar contrast" of slicks caused by the SAS films
The damping effect of the SAS film upon the sea surface roughness has been long
known (see, for example [21]). A theoretical description of the impact a monomolecular film had produced upon the surface waves was originally given by O. Reynolds in 1880 [22]. He calculated the wave damping coefficient under a film, which is capable of bending only, but staying non-stretched (in this case film is referred to as a non- stretchable one). As expected, the above coefficient was found to be dependent upon a single film parameter alone, namely, upon the surface tension coefficient (STC) α1 = α1(с1,Т) (where c1 and T are the SAS concentration and temperature respectively), which determine its vertical movements. The expression for this coefficient came into wide use in the literature on the theory and practical applications of sea surface roughness (see, for instance, [12]) and later in the literature on remote sensing of the ocean surface (see, [23]). The exact theory of interaction between the surface waves and the monomolecular film of the SAS with due regard to its stretching was elaborated by V.G. Levich [24]. He had shown that the wave damping coefficient is determined not only by STC, but also by a film surface activity p=(c1/α1)(∂α1/∂c1) otherwise referred to as its elasticity. As shown by the computer aided analysis [25] of the dependence of a precise coefficient upon the length of the surface wave,

27
the above-mentioned approximation of a "non-stretchable film" is not implemented under the real conditions of sea surface pollution (type of substances being involved, their state) even for the shortest capillary waves. The sea surface roughness radar contrast theory including the SAS effect [25] was built using the Levich damping coefficient and demonstrated excellent agreement with the experimental data for pure (one-component) SAS [25]. A comparison with the experimental data on multifrequency radar sensing of the oil-contaminated sea surface has clearly revealed a systematic discrepancy between theory and experiment for the capillary and capillary-gravitation ranges. This discrepancy tends to increase with a decreasing wavelength [26].
Oil is known [27] to consist of the mixture of different hydrocarbons. In contrast to pure SAS, these mixtures do not spread over the water surface, thus forming the monomolecular layers whose thickness is between h ~10 -10 сm, but they are capable of producing stable, stationary films in thickness on the order of fractions of a millimeter [28, 29]. These films are found to be macroscopic layers of a substance bulk phase, which are covered with a monomolecular layer of one of the SAS components, this layer being held in a surface phase. It is exactly the concentration of this surface phase – с
−6 −8
1 that determines the magnitude of the STC-α 1 . The oil layer comprises tens and hundreds of thousands of monomolecular layers that can move relative to one another, thereby producing multifarious macroscopic motions including the wave ones. The film thickness is then taken to be finite (from the hydrodynamic viewpoint) if it is comparable to the transversal scale of some type of motion (in our instance, we imply a wave motion). In the film substance as well as in any other weakly viscous incompressible medium there exist two types of surface waves: potential wave damping deep down with a scale of L ~λw, where λw is the length of the surface wave, and vortical wave damping deep down with a scale of δw =(2ν 1 / ωw) ½, where ν 1 is the SAS kinematic viscosity coefficient, ω is the surface wave frequency [30]. As the length of the surface wave varies from 0.1cm to 100cm, the depth of the viscous layer tends to range between hundreds and tens of fractions of a centimeter. Therefore the viscous wave motion might develop in oil films and the impact of the film upon the sea surface roughness has to be taken into account in view of their thickness [31, 32].
Now consider the following instances: A liquid of densityρ takes up the half-space z≤ 0 (sea surface), the plane z=0
corresponds to the undisturbed sea surface, and coordinates x, y describe the position of a point on the surface. Part of the sea surface is covered with a SAS film of equilibrium thickness h0. The sea surface is exposed to the turbulent wind that will be characterized by the mean velocity V and the random pressure field PV. The entire problem is to determine the influence of a film upon the radar contrast range coefficient (in what follows that will be "contrast") OS WWK /= , which is the ratio of powers of signals backscattered by
polluted (W ) and pure ( ) areas of the sea surface. Following the introduction of the
normalized radar cross-section (NRCS) [26] we arrive at the formula for contrast: S OW
0σ , (1.41) 00 / OSK σσ=
For the resonance scattering (θ ≠ 0 , π / 2 ) an expression pertaining to the latter is of the form [25]: ),(/),( 0 VkFVkFK ww= (1.42)

28
Thus, the film impact upon the surface wave damping and the radar sea-roughness contrast is defined by the ratio of spatial wave spectrum in a polluted sea area to the
spatial spectrum of the clean sea.
),( VkF w
),(0 VkF w
Consider the motion of the liquid and the SAS in a plane surface wave having the wave vector . To simplify the cumbersome formulas let us assume that in this chapter we will denote the wave number of a surface wave by letter k with no index, and the wave number of radio wave – by k
wkr
E. We run axis x along kr
, axis y – along the wave crest. In this coordinate system the properties of motion are not y-dependence and, in addition, there is no rate of motion component along the wave crest. The wave motion of a small altitude in a liquid will be described by the following set of equations:
,0,1=∆+∇−= udivuP
tu rrrr
νρ∂
∂ (1.43)
,gzPP ρ+=r
},0,{ zx uuur , ν µ ρ= / .
where P is the pressure and g is the gravitational acceleration; ur and µ are the velocity and the viscosity coefficient of the liquid respectively. In this case the perturbations of its surface ς are caused by the normal velocity component
zut=
∂∂ς
, at z=0 . (1.44)
In the depth of a liquid the perturbations of the velocity and pressure fields must disappear. The motion of subsurface in a film (0<z<h) is described by the following equations:
−=tv
∂∂ r
,0,~11 =∆+∇ vdivvP rrr
ν (1.45)
where
,~111 zgPP ρ+= },0,{ zx vvvr .
In the subsequent discussion we will assume that the film equilibrium thickness h ≤δ <<λ In this case the film thickness field varies far more intensively than along the surface, and the equations can thus be presented in a simplified form:
,~1
2
2
11
1 zv
xP
tv xx
∂∂
ν∂∂
ρ∂∂
+−= 0=+z
vx
v zx
∂∂
∂∂
0~
1 =zP
∂∂
, zgPP 111~~ ρ+= . (1.46)
These equations are a close analog of the boundary layer equations [33]. At the upper of the film h=h(x, t), whose shape is likewise to be determined, the conditions of continuity for normal and tangential pressure components should be met with regard to the surface tension and tangential force

29
,F cdc
d∇=∇=rrr α
α (1.47)
arising in the film due to deformation [24]. Under common assumptions of the wave theory [12] these conditions are specified on the equilibrium surface at z= . Thus, we have ( is the pulsation of turbulent wind pressure):
h VP
.0)(
2
1
1
11
,12
2
11
=∂∂
+∂∂
+∂∂
=∂∂
−∂∂
+
xc
dcd
xv
zv
Pz
vxhP
zx
Vz
αµ
µα (1.48)
These conditions should be complemented with another equation of balance of SAS surface phase concentration
,0)( 01 =+ xvc
xtc
∂∂
∂∂
at z = , (1.49) h
where =const is the undisturbed concentration of the film surface phase, and an equation for its perturbed free surface is given as
c0
zvth=
∂∂
at z = . (1.50) h
At the lower equilibrium boundary z=0 the velocities of the SAS and water motion as well as the surface tensions within them should be continuous:
u vx x= , u vz z= ,
µ ∂
∂∂∂
µ ∂∂
∂∂
α ∂ ς∂
µ ∂∂
µ ∂∂
( ) ( ) ,
,
uz
ux
vz
vx
Px
uz
P vz
x z x z
z z
+ = +
+ + = −
1
2
2 1 12 2 (1.51)
where α is the surface tension coefficient at the boundary of two liquid media. In (1.51) the surface elastic force does not exist, because the surface layer at the interface of two condensed bulk phases is in a saturation state, as the hydrocarbon chains of the SAS' molecules are oriented normal to the surface [21]. As shown in the state diagram (in the Langmuir isotherm) [21], this state corresponds to an area where d dcα / = 0 and, consequently, an elastic force (1.47) is nonexistent.
In what follows we focus will our attention upon the wind-induced sea roughness. By applying the Laplace time transform and the Fourier coordinate x to the system (1.43) -(1.51) we find the following expressions for spectral field amplitudes { factor exp(-iϖt ikx+ ) is later omitted, ϖ is complex spectral parameter}: In the liquid (-∞ < <z ζ ) :
zmzkx eueuu −+= 21 , ),( 1
zmzkz e
mkeuiu −−−=
zkeuk
gzP1
ϖρ
+−= , ζϖ ϖ
= −1
1(u k u2 ) . (1.52)

30
Here the values pertinent to potential and vortex waves respectively are labeled by indexes 1 and 2, . In this case the root quantity is chosen so as to ensure that the fields can get attenuated deep down into the liquid.
2/12 )/1( kikm νϖ−=
In the film ( ζ < <z h) :
znznx evevkPv −++= 21
1
0
ϖρ , P P gz1 0 1= − ρ ,
][
][
00 110
1
0
11
1
0
aenve
nvhkPkh
aenve
nvzkPikv
hnhn
znznz
+−+=
+−+−=
−
−
ϖρϖ
ϖρ (1.53)
where n i= −( ) /1 δ , δ ν= 2 1 /ϖ .
As evident from (1.53), the value of δ whose dimensional representation of length is the typical dimensional transversal scale of attenuation and oscillations of vortex wave motion in a film. For the weakly damping waves in a film it will be insignificant as compared to a wavelength, because
k kδ ν ϖ γ ϖ= =2 12
1/ / << 1 , (1.54)
where is the wave viscosity damping factor in a SAS. 211 2 kνγ =
In equations (1.52), (1.53) eight values of −u u v v P a1 2 1 2 0, , , , , ,ζ and h are unknown and can be determined from the boundary conditions on the equilibrium film boundaries and from the two equations for boundary perturbations – (1.43) and (1.50). In the final analysis we arrive at the following set of algebraic equations:
),()1( 0021
10
12
1
1
0
1
nhnhw evevihikPkP −++−+=
ϖγ
ϖω
ϖγ
ϖρϖρ
),( 00 210
1
0 aenve
nvhkPkh hnhn +−+= −
ϖρϖ
.)2()2()2(
),)(())((
],)([)](2[
),(1
,)(
10
1
0
12
11
1
01211
10
2
1
221
221
1
2
21
21
2121
,21211
0
00 kaikhkPink
knevi
nk
knev
kPuuki
ku
k
akvvn
knmkmuku
umku
umkuvv
nkka
uuvvkP
ssnhsnh −+−=−+−++
=+−+−
+−+
=+−
−=
−=−+
+=++
−
−
γγ
ϖργγ
γγ
ϖρρργ
ρργζωϖ
ρρνν
ϖζ
ϖρ
(1.55)

31
Here is the surface wave damping factor in the water, γ ν022= k
( )ω ρ ρ α− = − +1 13gk k / ρ and ω α1 1
31= +gk k ρ
ϖ
are the wave
frequencies at the SAS-water separation surface and at the free SAS-air separation surface respectively. The influence of the film attenuation in the equations (1.55) reveals itself in terms of parameter , where p = (cγ ωs cp= 1
2 / 1/α1)(∂α1/∂c1) is the film elasticity
coefficient (later it will be referred to as "elasticity"), ω αc k1 13
1= ρ is the frequency of capillary surface waves in a SAS. Along with the film elasticity, equation (1.55) includes average film thickness , mass density of SAS bulk phase h0 ρ 1 and film kinematic
viscosity factor ν 1 that specifies damping factor γ 1 and transversal scale δ of the variation in the viscous wave field in a film. Following the solution of system (1.55) the Fourier-amplitude c k( , )ϖ of the surface phase concentration at the upper boundary of the film will be determined from the formula:
c k c k kPv e v enh nh( , ) ( )ϖ
ϖ ϖρ= + + −
00
11 2
0 0 , (1.56)
resulting from (1.49). To examine the case where the film has a monomolecular thickness it is necessary to make a limiting transition in eqs. (1.55)-(1.56) at h0 0/ δ → and kδ → 0 and take account of the fact that, as two interfaces merge, both the surface tension coefficient and the surface phase state are bound to undergo certain changes. Eventually the problem as it is boils down to determining the velocity field in a liquid:
.0])([][
,)()1(
22201
02
2020
2
201
=++
−++
=+++−
ϖγ
ϖν
ϖγ
ϖγ
ϖρϖγ
ϖω
ϖγ
ϖω
ss
w
kmikm
mui
ku
kPkmi
mui
ku
(1.57)
Here is the surface wave frequency in a liquid,
. The spectral amplitudes of the surface rise
2/130 )/( ραω kgk +=
γ α ρs p k= 3 / ϖ ς and SAS concentration within it are then found from the formulas below:
ςϖ
= −1
1( )u km
u2 , c c k= 0 ϖ
(u u1 2 )+ . (1.58)
In terms of the other values included in (1.55) and characterizing the film motion, we arrive at the following expressions:
kP kPw02
0
ϖ ϖωϖ
ς= + , ςϖ=ka , h =ς , v ux x z=
=0 , v uz z z
==0
. (1.59)

32
A set of eqs. (1.57) at 0=VP was examined in [24], at 0≠VP - in [25]. The system of eqs. (1.57) is found to be rather cumbersome to be immediately solved unless the physical meanings of the resulting data are checked, and no comparison to the known data on the zero-thickness film is made. Therefore, we will proceed as follows. Using the equality conditions for normal pressures at the interface and for the tangential forces on a free surface (the two latter eqs. (1.55)) and excepting the unknown values of and ka ς , we separate in the left-hand parts of these equations those terms (the first two) that characterize the zero-thickness film. Thus we have: uk
ium
i mk
vk
e kn
i
vk
e kn
iP
khuk
uk
vk
vk
uk
ium
m k i mk
vk
e i
nh
nh w
s s nh s
12
20 2
2
20 1 1 1
2
21
1 2 12
21
01
2
21 1 2 1 2
1 0 22 2
1 1
1 1
1
1
0
0
0
( ) ( ) ( )( )
( )( ) ( ) ( ),
[ ] [ ( ) ] ( )[
− + + + + − − + +
+ − + = + + − +
+ + −+
+ + − +
+ +
−
ωϖ
γϖ
ωϖ
γϖ
ρρ
ωϖ
γϖ
ρρ
ωϖ
γϖ ϖρ
ωϖ
ρρ
γϖ
γϖ
νϖ
γϖ
γϖ
ρρ
γϖ
γϖ
ρρ
γϖ
γϖ
ρρ
12 2
2 1 12 2
01 1 1 2 1 2
2
12 2
0
k nkn
vk
e i k nkn
khuk
uk
vk
vk
nh s
++
+ − −+
= − + − +−
]
( )[ ] ( ) ( ),
(1.60)
where is the surface wave frequency including the capillary forces on a free surface and at the interface. In the right-hand parts of the equations the components proportional to a relative film thickness - are singled out. For a typical oil film 30 µm thick and a X-band surface wave these terms have a relative value of ∼10
ω α α+ = + +[ ( ) / ] /gk k13 1ρ 2
kh0
–2
in the first and ∼ 10 –3 in the second equations. Using the velocities continuity conditions at the interface, we express the substance velocity v1 and v2 in a film in terms of the liquid motion speed u1 and u2 in the following manner:
,2(1,2(11
21
100
⎭⎬⎫
⎩⎨⎧
++−∆
=⎭⎬⎫
⎩⎨⎧
+−−∆
= −
γγ
γγ snhsnh i
knBeAvi
knBeAv
where
(1.61)
∆ = +⎧⎨⎩
⎫⎬⎭
2 20
10
nk
ch nh i sh nhs( ) ( )γγ
,
AkP
kh i kh i u km
u
BkP
u u u km
u
w s s
w
≡ − +⎧⎨⎩
⎫⎬⎭− + +⎧⎨⎪
⎩⎪
⎫⎬⎪
⎭⎪−
≡ − + + − −
ϖργγ
ωϖ
γγ
ϖρωϖ
10
1
12
2 01
1 2
11 2
12
2 1 2
21
2( ) (
( ) ( ).
), (1.62)
By omitting the cumbersome computations we present the final form of equations to determine liquid velocities u1 and u2:

33
.
,1
212
222
1101
1120
2
22
110
2
21
Π=⎭⎬⎫
⎩⎨⎧
−++
−+⎭⎬⎫
⎩⎨⎧ −+
Π+=⎭⎬⎫
⎩⎨⎧
−++⎭⎬⎫
⎩⎨⎧
−+− ++
bkmikm
mubi
ku
Pakmi
muai
ku
ss
w
ϖγ
ϖν
ϖγ
ϖγ
ϖρϖγ
ϖω
ϖγ
ϖω
(1.63)
Here the terms proportional to the relative film thickness appear in the right-hand side of eqs. (1.63) as distinct from eqs. (1.57):
kh0
Π Π11
2
20
0 21 0
012
= = −ωϖ ϖρ
γϖ ϖρ
Pkh
Pkh, . (1.64)
The above terms describe both the normal and tangential tensions that arise in a film, as the substance move within it. The dispersion equation that determines the eigenfrequencies (in general, complex ones) of the surface waves has this form:
1
0
2
20
11
2 2
12
2
20
120
11
− + −⎡
⎣⎢⎢
⎤
⎦⎥⎥−
++ −
⎡
⎣⎢
⎤
⎦⎥ −
− + −⎡
⎣⎢⎢
⎤
⎦⎥⎥
+ −⎡
⎣⎢⎤
⎦⎥=
+
+
ωϖ
γϖ
νϖ
γϖ
ωϖ
γϖ
γϖ
γϖ
i a m k i mk
b
i mk
a i b
s
s
( )
(1.65)
At ~ the values , , , b , and equation (1.65) goes over to the known equation of surface waves under a zero-thickness film [24]. Reducing the film thickness to that of a monomolecular layer is certain to bring about a considerable change in the pattern of interaction between the water surface phase, the SAS and the ambient air. The sum of the surface tension coefficients in the expression for
nh0 h 0 0/ δ → a11 a12 b11 12 0→
ω + will go over to the
surface tension coefficient of the SAS water solution at the air- α 0 interface. Frequency
ω + will then become an eigenfrequency of the surface waves under the zero-thickness SAS film (1.66) .]/[ 2/13
00 ραω kgk +=The solution to equation (1.59) will be sought in the form: ϖ ω γ γ ω= + <<i , , (1.67) which corresponds to weakly damping waves. Upon substituting of (.67) into (1.65), separating out its real and imaginary parts and linearizing in parameters γ ω γ ω/ , /0 and , we obtain the following expression for a surface wave eigenfrequency in a zero approximation:
kh0
ω = ω α α+ = + +[ ( ) / ] /gk k1
3 1ρ 2 . (1.68) Following rather cumbersome computations in a first approximation with the above parameters, we arrive at the following relation for the wave damping factor:

34
2 2
0 1 2 3γ
ωγω+ +
= − − + −L kh S S S( ) , (1.69)
where
γ γ
γω
ωγ
γ
ωωγ
γ
ωωγ
γω
ωγ
γ
ωωγ
L
g g g
g g
=
− +⎛⎝⎜
⎞⎠⎟ +
⎛⎝⎜
⎞⎠⎟
− +⎛⎝⎜
⎞⎠⎟
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥
+
+
+
+
+
+
+
+
+
+
00
2
20
2
20
3 2
0
2
20
1 12
1 2
/
(1.70)
is the surface wave damping factor under the zero-thickness film [24] ,
.)/( 21 sg γρργ = Expressions and appearing in the right-hand side of (1.69) takes the form:
21, SS S3
,
1421
2211
,
221
221
,
221
122
1
2
0
2
0
2
0
0
002
2
13
2
00
2
21
0
102
210
0
2
2
011
2
00
00
012
21
2
21
0
1
01
⎟⎟⎠
⎞⎜⎜⎝
⎛
ω
γ
γω
−⎟⎟⎠
⎞⎜⎜⎝
⎛ω
γ
γω
+⎟⎟⎠
⎞⎜⎜⎝
⎛
ω
γ
γω
−
⎥⎦
⎤⎢⎣
⎡
ωγ
+ω
γ
γω
+−⎟⎟⎠
⎞⎜⎜⎝
⎛
γω
ω
γ−
⎟⎟⎠
⎞⎜⎜⎝
⎛ω
γ
νν
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛ω
γ
γω
+ω
γ
γω
−
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛
ωγ
−ωω
γω
ρρ
−ωγ
ωω
ωγ
+ωγ
−
γω
⎟⎟⎠
⎞⎜⎜⎝
⎛ω
γ=
ωγ
ρρ
−
−
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛ω
γ
γω
+ω
γ
γω
−
ωγ
−⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛
ωγ
−γ
γ
ωω
−⎟⎟⎠
⎞⎜⎜⎝
⎛
ωγ
−ωω
γω
ρρ
⎟⎟⎠
⎞⎜⎜⎝
⎛
γω
ω
γ−
ω
γ=
+
+
+
+
+
+
++
++
+
+
+
+
+
+
++
+
+++++
+
+
+
+
+
+
+++++
+
+
++
ggg
gg
g
gg
ss
g
gg
gs
gg
S
S
S
(1.71)
(1.72)
According to [25], the spatial spectrum of the sea surface roughness heights F
under the SAS film is dependent upon the potential waves and is equal to:
(1.73)
222
2
4),(),(
γωρ +
Ρ=
VkkVkF , (1.74)

35
where is the spatial spectrum of wind pressure fluctuations depending upon the wind speed V, whereas the frequency and surface wave damping factor is determined by formulas (1.68) and (1.69). In dividing (1.74) by the sea roughness spectrum on clear water we get:
),( VkΡ
20
20
20
2
0 4),(
),(γωρVkk
VkFΡ
= , (1.75)
where ω 0 , and γ ν022= k ),(0 VkΡ being, respectively, the frequency (1.66), the
wave damping factor and the spatial spectrum of wind pressure fluctuations above a clear water surface, we find the wave height contrast range coefficient:
),(),(
022
20
20
VkVkK H Ρ
Ρ=
+ γωγω
. (1.76)
Similarly, the expressions are also calculated for radar coefficients of radio wave power contrasts with wave number . These radio waves are taken to be backscattered both from polluted and clean areas of the sea surface in the resonance (Bragg) scattering (incidence angles10 ) [25]:
kE
800 0≤ ≤θ
),(),(
022
20
20
VkVkK
ΡΡ
=+ γωγω
at θ= sin2 Ekk , (1.77)
and in the near-vertical (Kirchhoff) reflection [25]:
Ka bP
x y= − − +⎛
⎝⎜⎜
⎞
⎠⎟⎟
⎧⎨⎪
⎩⎪
⎫⎬⎪
⎭⎪α α
γ γ2 22
02
2
021
2 2exp ( ) . (1.78)
In formula (1.78) the tangents of sea surface incidence angles are denoted by γ x and γ y in
two orthogonal directions x and y, and b are their root-mean square values computed
for the clear sea surface,
a0 0
α 2 20
2= ∫ ∫k W dk k Wdk is the quantity calculated from the
wave height spectra (1.74) and (1.75), respectively, on polluted and clear sea surface areas. When writing expression (1.74) a small (on the order ) spectrum magnitude correction is neglected, and it was believed that:
k h2 2
),(),( 0 VkFVkF = .
In this context, as regards the contrast range coefficients and KH K , we deduce the following expressions from (1.76)-(1.77):
22
20
20
)()()()(
)(kkkk
kK H γωγω
+
= , (1.79)
22
20
20
)()()()(
),(kkkk
kK E γωγω
θ+
= at θsin2 Ekk = (1.80)

36
An expression for the contrast (1.78) will then remain unchanged. The procedure of calculating the value of α appearing in the above formula will be simplified. To facilitate the comparison between the obtained data and those from the work [25], which are pertinent to the zero-thickness film, we single out in formulas (1.69), (1.78)-(1.80) the terms related to a film thickness. Eventually, the following formula is derived for damping factor:
,21 0
0 RkhL
+++
+=−ωγ
ωγ
ωγ
(1.81)
where R S S S≡ + −+ωγ 0
1 2 3( ) . (1.82)
The wave height contrast range coefficient is then written as:
)(,211 22
02
02
0
20
00LL
H KRkhKKγωγω
γγ
+
−
=⎟⎟⎠
⎞⎜⎜⎝
⎛+= , (1.83)
where is the wave height contrast range coefficient under a zero-thickness film. For
contrast = -10lg K we then obtain this expression:
K0
DH
.)lg10(,)2
1(lg20)(),( 0000
00 KDRkhkDhkDL
H −=++=γγ
(1.84)
The radar contrasts are derived from (1.83)-(1.84) by replacing in the above equation
the surface wave number k with
DR
kE sinθ . The formulas thus deduced will subsequently be employed in numerical calculations.
Now we intend to perform some particular calculations with reference to an oil film. We will decide upon the following values [34]: for the surface tension coefficient at the "air-oil" boundary - α 1 =60din/сm, at the "oil-water" boundary - α =13din/сm, for the
kinematic viscosity coefficient of water - сm ν = −10 2 2/sеc, of oil - ν 1 0 3= , сm2/sеc.
The liquid density will be taken to equal ρ = 1g/сm3, the oil density ρ 1 0 8= , g/сm3. Fig 1.5 presents a plot of the zero-thickness film contrast (curve 1) and the film thickness h0 =1.34⋅10–2 сm (curve 2) versus the surface wave length. These films have a surface activity p =0.149. In the region of capillary and short gravity waves (λ < 4.3сm) an effect of wave damping by a finite-thickness film is seen to be reduced. This is because the upper boundary of the film is slipping relative to the water surface and due to the fact that the speed of its motion decreases, which, according to (1.47), brings about a reduction of its elastic force.
As the wavelength shortens, this effect tends to be enhanced, because the viscous wave layer in a film decreases (see Fig.1.6). With λ = 1.5сm the slippage effect reduces the contrast by 8 dB. In the gravity wave region (λ > 4.3 сm), where no slippage occurs any longer, the damping effect is augmented. This results from the viscosity being present in a film. For a given thickness and film parameters the slippage and viscosity effects are balanced at λ = 4.3сm and the contrasts of zero- and finite-thickness films are the same. As the film activity increases, the point where the contrasts coincide is shifted to a greater

37
wavelength. The impact of the film viscosity decreases with an increase in the surface wavelength, although it is still pronounced even in the metric waves.
Fig.1.5. A graph of sea state contrast as a function of the surface wave length under oil films of different thickness: 1 - h = 0; 2 - h = 0.0134 сm. The surface activity of the films р=0,149. The experimental values of contrast ranges are marked off by black squares (see [26])
All the above-mentioned effects can be easily observed in Figs 1.7 and 1.8 where
the plots of the difference in contrasts of varying film thickness are given as a function of the surface wavelength, the film in question having an activity p=0.3. Fig.1.9 shows that the contrasts of surface waves of different length is dependent upon the film thickness at p=0.149, and it provides an insight into the some specific mechanisms for the contrast variation with a film thickness for the capillary (curve 1) and gravity (curve 2) ranges. Examining the curves in Fig.1.9 suggests that at short waves the contrast is the linear function of thickness at h0 ≤ 3⋅10–3 сm only. In a gravity range the film thickness-dependent contrast characterizes the effect of the SAS viscosity impact upon the longitudinal wave motion in a film. In this case expression (1.84) can be replaced with a simpler relation:
)(10
)(,)()(),( 321000 SSSkMkMkhkDhkDL
H −+=+= +
γω
, (1.85)
where D0 (k) is the zero-thickness film contrast.
Fig.1.6. Thickness of viscous wave oil-containing layer
as a function of the surface wavelength

38
Fig.1.7. The contrast differences of oil slicks in the sea
surface roughness under the oil films of different thickness:-1-h0 =0; 2-h=0.007 сm, р=0.3
Fig.1.8. The contrast differences of oil slicks in the sea surface roughness under the oil films of different thickness:1-h=0; 2-h0 =0,007 сm, р=0,149
Fig.1.9. The contrasts of different-in-wavelength surface waves as a function of the oil film thickness: 1 – 1.58сm;
2 – 12.1сm; р = 0,149

39
The wavelength-dependent function M(k)=∆D/kh0 at different values of the surface activity of a film is shown in Fig.1.10. It is seen that the surface activity and a wavelength exert a powerful influence on the film behavior. From this viewpoint the phenomenological dependence M(k) suggested in [26] (see dashed straight line in Fig.1.10) is insufficient, because it does not offer any required properties.
The plots that had been previously obtained were used to determine an oil film thickness from the data collected through multifrequency radar sensing of the offshore area in the Caspian Sea where oil-producing platforms (otherwise called "Neftyani Kamni" were installed [26]. The data-gathering procedure was carried out as follows. The surface waves with λ = 1.58сm and λ = 12.1сm that correspond to solid curves 1 and 2 (see Fig.1.9) are resonance-reflecting for the radio waves of λЕ=3.2сm and 23сm respectively with the sea surface being sensed at an incidence angle of θ=720. These curves were computed using formula (1.84). The dashed horizontal straight lines 1 and 2 correspond to the contrast values derived experimentally at these radio wave bands. To determine the film thickness, the formula (1.84) was computed at specified (above-mentioned) values of densities, liquid and SAS kinematic viscosity factors and the surface tension coefficients on the film boundaries until curves 1 and 2 intersect the corresponding dashed lines at one and the same film thickness value. These intersection points are marked off by small boxes (see Fig.1.9). Two parameters of the oil film were defined by this procedure, i.e. its stationary thickness h0=0.0134сm and its surface activity p=0.149. The contrast of this type of film as a function of the surface wavelength is presented in Fig.1.5. According to the Langmuir isotherm for oil, the deduced surface activity value corresponds to the surface concentration of the SAS active fraction с1 ≈ 7 mg/m2. An 1-km2 area of this film contains 107.2 tons of oil. The film thickness thus measured is nearly 4 times greater than the value normally used in evaluating an oil film thickness. In [26] a description was given of the experiments with sensing even at a shorter wavelength λE =0.8 сm. However, we were unable to make use of the data obtained during the above experiment, because the viscous-wave layer thickness for a resonance surface wave (λ= 0.42 сm) is quite comparable to a film thickness.
Fig.1.10. The wavelength-dependent factor M(k) (according with (1.84))at different values of the surface activity of a film: 1 – р=0,05; 2 – р=0,3; 3 – р=1. The dashed straight line is M(k) at [26]

40
In determining the film thickness the remaining film and liquid parameters such as densities, viscosities, surface tension coefficients were assumed to be known. In monitoring the oil-polluted sea surface by radar facilities under real conditions it is solely the water parameters that can be thought of as known. As far as the oil parameters are concerned, they are found to vary amongst diverse types of oil and depend upon certain conditions such as temperature. Therefore, the film thickness and the other film parameters should be determined concurrently. For this purpose one should be provided with a large number of experimental contrast values (in general case – six of them) obtained by the use of different radio wavelengths or at different sensing angles. The experimental data in combination with some theoretical grounding will allow setting up 6 equations (in the general case) to determine oil density - ρ1, surface tension coefficients - α1 and α, viscosity coefficients - µ
1, surface activity – p and stationary film thickness h0. It is quite obvious that any additional information on the film properties, which was collected by other than radiophysical methods can only simplify matters. In order for the parameters and oil films to be determined from the experimental data it is necessary that a theory, which does not contain any assumption about a relative thickness of an oil film, be further extended.
Now we will cite a few results relevant to the radar contrasts of sea surface roughness under oil films [25].
The oil film thickness is far smaller than that of a viscous wave layer, therefore, the radar contrast theory can be elaborated with a wave damping factor only (see (1.70)).
Figs. 1.11 and 1.12 show the dependencies of radar contrasts in resonance scattering upon the radio wavelength and an incidence angle at different film activity values. In addition, experimental values are presented therein as well [25].
Fig.1.11. Contrast K and logarithmic contrast D as a function of the surface wavelength in the presence of an oil film (α=33 din/сm) (crosses are for the experimental data)

41
Fig.1.12. Angular dependencies of contrasts K and D for a 21.5 cm radio wavelength at varying oil film activities (circles are for experimental data)
Fig.1.13 displays the curves of the logarithmic contrast of sea surface roughness
under an oil film in the Kirchhoff scattering of a 3.2cm radio wavelength. The experimental data (shown in circles) are taken from Ref. [35].
Fig.1.13. Logarithmic contrast of sea surface roughness at small angles of radio wave incidence in the presence of an oil film with varying surface activity p (circles are experimental data)
Note that theoretically one can account for the high values of contrasts and their
dependence upon the length and incidence angle of radio waves, these waves being experimentally observed. Yet at present making a more detailed comparison between theory and experiment presents a bit challenge. The reason is that in general during the experiments no monitoring of the oil film activity was not carried out.

42 § 1.3 Microwave radio wave sea ice scattering
Sea ice features
In exploring the worldwide ice sheets through the use of radar remote sensing techniques with aircrafts and satellites the effectiveness and utility of this investigative approach are largely dependent upon the carefully analyzed features of microwave scattering by ice sheets and the interrelationship of electro-physical and physicochemical properties of ice.
The natural ice systems are amenable to fundamental physical laws. Yet their properties are governed by particular regional conditions. In addition, the physical properties of natural ice are susceptible to seasonal variations [36-38].
The afore-mentioned properties of ice sheets are determined by a hydrometeorological regime and salinity of storage reservoirs over a span of time before water gets frozen and during the ice growth period, by morphological characteristics and the processes of metamorphic transformation of snow and ice, etc. [39 - 42].
The ice formation processes are closely related to a thermal and dynamic state of the atmosphere and ocean. Thickness of ice, its thermal-physical properties such as heat conductivity, heat capacity, specific heat of melting, etc., in their turn, have a definite impact upon the thermal regime of the ambient air. The sea ice can have a dramatic effect upon the variation in geographical and temporal atmosphere-ocean heat exchange signatures. As the sea ice plays a role of a specific heat controller, it impedes sea heat losses in the wintertime and sea heating-up throughout the warm seasons of the year [39, 43].
In this context one of the primary goals is to determine the boundaries of ice propagation and to monitor time-space variations of the ice cover area in the Arctic and Antarctic regions. Thus, the atmosphere-ocean interaction cannot be effectively measured without the sea ice being monitored.
The distinctive features of sea ice growth and basic physicochemical properties of ice.
The key mechanisms for the growth of sea and ocean ice sheets are described by the balance of heat flows on a water surface and the heat conduction equation for ice [44]:
ТIIK ФhzdzdT
dtdhL −== λρ (1.86)
);( JdzdT
dzd
dtdTС III +⋅= λρ )(0 thz ≤≤ (1.87)
where LК is the specific heat of water crystallization; Iλ is the ice heat conduction; is
the ice heat capacity; IС
Iρ is the ice density; Т is the thermodynamic temperature, ФТ – is the thermal flow close to the water surface; J is the power of heat sources in the ice bulk; h is the ice thickness.
The solution to equations (1.86, 1.87) presents a considerable challenge, since heat conduction and heat capacity is temperature- and time- dependent in terms of variations with time of existing ice thickness. However, as seen from the simplified analysis of solving these equations, it is possible to reveal a number of sea ice growth regularities [44]. For instance, a temperature gradient decrease caused by a growth in ice thickness tends to reduce heat outflow through ice. As a consequence, for a certain ice thickness the ice

43 growth process is discontinued. A value is referred to as a limiting ice thickness and specified as:
ТOfrII ФТТh /)( −= λ (1.88)
where Тfr is the ice point, ТО is the temperature of ice upper boundary. The changes in the ice surface temperature do not make a profound impact upon the ice thickness buildup, which is primarily governed by an average value rather than by its fluctuations.
A crucial factor affecting the ice growth rate is the snow cover. The upper boundary temperature and the limiting ice thickness in the presence of the snow cover are described by the following expressions [44]:
IsnsnI
IsnsnIsnО hh
hhТТ⋅⋅+⋅⋅+
=λλλλ
/1/
(1.89)
)/1()(
IsnsnIТ
snfrII hhФ
ТТh
λλλ+
−= (1.90)
where Тsn is the snow surface temperature, snλ is the snow heat conduction, hsn, hI are the snow and ice thickness respectively. Considering that the snow heat conduction is approximately by an order of magnitude lesser than ice conduction, even a thin snow layer is certain to bring about a increase in the temperature gradient in ice and its limiting thickness.
The distinguishing characteristics of the ocean-atmosphere exchange with the existing snow cover over the autumn-winter period are the presence of air temperature gradients Тa and the upper snow and ice boundary. This may well be illustrated in Fig. 1.14 [44], where the relationships between the snow-ice surface temperature (Тsn) and the ice/snow thickness are presented.
According to the measurements made in the area of the drifting station NP-22 (North Pole-22) the temperature of winter, autumn and pack ice surface plotted against the air temperature is shown in Fig. 1.15 [45].
As may be seen from the plot given below, when the temperature of air is low and the ice sheet thickness is great, the snow surface temperature is relatively close to the environmental air temperature. At the same time, as the intensive heat flows through the ice of small thickness, the freezing of the upper ice or snow boundary is hampered, thereby resulting in a high gradient at the air-ice interface.
The sea ice is a multicomponent mixture consisting of solid (crystalline ice), liquid (brine) and gaseous (air bubbles) phases. As the sea water gets frozen up on a lower surface, a framework layer is formed which is made up of clear ice plates with a brine mass in between (it looks like a brine pocket). The plates thicken, as they become frozen up, and some ice ties arise, and subsequently it leads to formation of solid ice with brine-containing cells frozen in [42].
These cells constitute a layered structure with layers perpendicular to the ice growth direction. As indicated in [39], the sea ice has both brine-containing cells and communicating capillaries filled up with brine.
The volume of brine in the sea ice can be determined from the expression in [41]:

44
brbr
CS
brbr
IIIbr S
mSSVV
ρρρ
⋅−
⋅⋅
= (1.91)
where Vbr is the volume of brine; VI is the volume of ice; SI is the ice salinity; Iρ is the ice
density; Sbr is the brine salinity; brρ is the brine density; mCS is the mass of crystalline salts. The brine salinity and the mass of crystalline salts in ice are temperature-
dependent. Hence, according to (1.91) the brine volume in the sea ice is also a function of temperature.
In the course of ice growth or, as the melting period sets in, the amount of captured brine shows a gradual decrease. As it takes place, the main mechanisms of brine draining are: brine migration resulting from the temperature gradient in the ice thickness, gravitational drainage, i.e. the movement of heavy brine by gravity [46, 47]. The larger part of the brine mass flows out of the ice at the initial stage of its formation. As noted above in [38] and according to the references cited therein, the average sea ice salinity tends to decrease at a fast rate until its thickness grows to 0.4 m. The salinity is subsequently observed to show a slower decrease. This is because the temperature of the thin-layer sea ice is relatively high (see Fig. 1.14), and in this instance the brine run-off rate associated with thermal processes is higher than in a gravitational drainage which is the principal brine drainage mechanism at low ice temperatures.
Fig. 1.14. The snow-ice surface temperature plotted against the ice-snow
thickness. hsn/hI=0,05 for hI <20 сm; hsn/hI=0,1 for hI >20 сm [44]

45
Fig.1.15. Dependence of winter (a), autumn (b) and pack (c) ice surface
temperature (Tsn) upon the ambient air temperature (Tair). The measurement data obtained in the North Pole-22 area [45]
The brine run-off rate is strongly dependent upon the cross-section of capillaries
and the difference in brine and air densities. In this connection the brine run-off rate in the above-water portion of ice is by three orders of magnitude greater than in the underwater part of ice [42].
In the course of ice sheet growth the densities in the upper ice layers undergo certain variations resulting from the accumulation of snow and its metamorphism, brine migration, etc.
The profiles of salinity and density in the upper layers of winter and autumn ice were obtained from the measurements of physicochemical characteristics in the NP-22 area during the winter-spring period [45]. These profiles are shown in Figs 1.16 and 1.17 respectively.
The salinity and density profiles are featured by the clear-cut defined snow-ice boundary. Specifically, it is evident from the upper ice layer density which is slightly lower as compared to the deep-lying layers, and from the higher degree of salinity of a transition layer between snow and ice as compared to deep-lying layers.
An increase in the solar heat inflow and an elevated air temperature in the spring-summer time brings about a rise in ice temperature. As the sea ice temperature increases, there occurs internal melting within it around the brine-filled cells and channels, which leads to an increase of their volume and is conductive to the run-off of brine into ice lower layers or into the water. It is exactly for this reason that the salinity of surface ice layers decreases rapidly and they become virtually fresh. Since the radiation heat contributes dramatically to ice melting processes, the spatial inhomogeneities of the snow-ice surface albedo give rise to a spatial ice thawing-away inhomogeneity which grows with time. As a result, a great many puddles (thawing water lakes on the ice surface) and thaw holes come into being. The melting processes are also the contributive factors for breaking down of hummocks that will later become smoothed-out mounds [39]. The summer-time melting results in a partial fracture of first-year ice.
The impact of thermal factors (winter-time ice build-up and summer-time ice melting) is conducive to forming the density and multi-year salinity profiles that differ essentially from the corresponding profiles for first-year ice. Figs 1.18 and 1.19 demonstrate the profiles of density and salinity of multi-year and first-year ice upper layers during the winter-spring period of the year [45]. As noted in [45], the upper portion of second-year and multi-year ice is made up of active layers (the layers that had gone through a single or several melting phases). The active layer is formed through freezing up of water-soaked snow in the upper portion of an ice sheet and constitutes a fresh water loose layer

46 with no clear-cut boundary with ice. The air-filled pores in these layers may be equal to 1cm in diameter.
Fig.1.16. Distribution of salinity in the upper layers of winter (1) and
autumn (2) ice

47
Fig.1.17. Distribution of density in the upper layers of winter (1) and autumn (2) ice

48
Fig.1.18. Distribution of density in the upper layers of second-year (1)
and multi-year (2) ice

49
Fig.1.19. Distribution of salinity in the upper layers of second-year (1)
and multi-year (2) ice

50 The basic characteristic that specifies ice thickness, the topography of ice surface,
physicochemical and electro-physical properties of ice is the age of the latter. In keeping with the existing classification [48-50] we highlight the following principal types of ice: 1 – nilas; 2 – young ice; 3 – first-year ice; 4 – old ice.
Nilas is the elastic water-logged ice crust of up to 10cm thick, which deflects under the actions of a waves and ripple. It is divided into dark nilas of up to 5 cm thick and light-colored nilas of up to 10 cm thick. The upper surface of nilas ice is sometimes covered with brine spots.
The young ice is categorized into grey ice (10 to 15cm thick) and grey-white ice (15-30cm). The surface of grey ice is typically wet by the effect of brine. Freezing of brine on the ice surface is terminated at the grey-white ice stage.
The first-year ice is referred to as the sea ice that was formed due to the evolution of the young ice and persisted throughout a single winter period only. The first-year ice is classified into thin first-year (white) ice of 30 to 70cm thick, medium thickness (70-120cm) first-year ice and thick first-year ice of over 120cm thick.
The old ice is the sea ice that was subjected to melting, at least, over one summer period. It is classified as residual first-year ice, second-year and multi-year ice. The residual first-year ice is identified as the ice that had not melted in the summer time following the onset of steady ice formation in autumn. This ice has a thickness of 160 to 180cm and after January 1 in the Northern Hemisphere (and after July 1 in the Southern hemisphere) the above ice is called the second-year ice. The multi-year ice is the old ice that had been going through the melting phase for, at least, 2 years. The multi-year thickness of the ice is around 3m and more.
As noted above, the sea ice age is basically dependent upon the relief of the sea ice surface. The major relief-forming processes can be broken down into two groups [51]; dynamic processes involving the bending of thin ice, thermal cracking, rafting, hummocking, etc. as well as thermal-physical processing in melting of ice and its build up, water erosion, etc. At the same time, as indicated in [51], of the diverse sea ice topography forms one can single out a macro-relief whose elements are being formed primarily due to ice hummocking and by melting and building up for a long period of time. One can also highlight a micro-relief which combines small roughness overlaying the macro-relief elements and tends to emerge under the influence of thermal factors.
The snow cover thickness on drifting ice in the Arctic area is reasonably insignificant [38, 40, 52]. In general, the snow cover on the young ice is unstable whereas the snow cover thickness on the first-year and multi-year ice according to the data given in [51, 52] ranges between 3 to 5 and 20 to 30cm. The upper ice surface irregularities are conducive to snow accumulation, and the snow cover thickness in the hummocked ice areas may far exceed the snow thickness on smooth ice tracts. In this context it is found that the hummocks contain just about a half of the whole snow mass lying on the drifting ice [52].
Thus, the physicochemical properties of sea ice are closely related to its age (i.e. its thickness) and are determined by dynamic and thermodynamic variations in the atmosphere and the ocean.
The electro-physical properties of the sea ice are determined by its physical condition, because the dielectric characteristics of ice covers are dependent not only upon the crystalline state but also upon its temperature, salinity and density that are intimately linked with those characteristics. The processes occurring in the upper sea layers (temperature-dependent brine migration, snow accumulation and its metamorphism, melting, etc.) are responsible for vertical distribution of ice dielectric characteristics [40].
The measurement data on the dielectric characteristics (specifically, refractive index n and specific attenuation N) of the first-year ice and slightly-salted samples of second-year and multi-year ice over the microwave range are examined in [53]. The

51 measurements were made using both quasihomogeneous samples (those ones in which inhomogeneities are uniformly volume-distributed) of the first-year ice and the old-ice samples lying below the active layers. The mean values of the refractive index and specific attenuation (see [53]) are listed in Table 1.1.
Table 1.1
The refractive index and specific attenuation in the Arctic Sea ice with a variation in temperature and salinity over the microwave range [53]
Salinity, 0/00
2 5 8 2 5 8 Tempera-ture, C0
Radio wavelength,
сm refractive index specific attenuation, dB/сm -37 0.78
3 7.9
1.79 1.79 1.79
1.79 1.79 1.79
1.79 1.79 1.8
0,1 0,01
0,001
0,25 0,03
0,002
0,42 0,05
0,004 -23.5 0.78
3 7.9
1.79 1.79 1.8
1.8 1.8
1.82
1.8 1.82 1.83
0,4 0,1
0,002
0,9 0,25
0,004
1,5 0,4
0,006 -13.5 0.78
3 7.9
1.78 1.81 1.82
1.79 1.85 1.89
1.8 1.88 1.95
0,7 0,55 0,04
2,2 0,2
0,15
4,4 1
0,3 -5 0.78
3.0 7.9
1.79 1.81 1.82
1.84 1.9
1.92
1.88 2.1 2.2
1 0.25
-
3 1
0.6
9 5 -
The measurement data of the refractive index and specific attenuation of X-band
waves for nilas, the young and white ice of the Bering Sea are given in [54]. According to the data in [54], the values of the above parameters pertaining to the
refractive index and specific attenuation are equal to n=1.95-2.23; N=4.7-7 dB/сm at a temperature of 120 - 130С and n=3.2; N=10.5 dB/сm at a temperature of 20С.
The results cited in [53, 54] are, on average, in fairly good agreement with the data provided by foreign researchers [55-57 et al.]. However, it should be noted that the spread in experimental values n and N at close magnitudes of salinity, density and temperature embraces a relatively wide domain. The spread in experimental data tends to increase at temperatures close to the ice melting temperature and to decrease at temperatures below an eutectic one for sodium chloride. This suggests that a liquid phase in salty ice makes an impact upon the scattering characteristics in a forward direction [53, 54].
The vertical profiles of permittivity for the upper layers of drifting ice are related to the ice salinity and density profile and also depend upon the ice age [58]. As an example (see Fig.1.20), the refractive index and specific attenuation distributions in the upper layers of winter and multi-year ice are presented. As noted in [58], in the case of the sea ice whose salt content is high, the vertical distribution of the refractive index correlate with that of density at temperatures below the eutectic value for sodium chloride and with the salinity distribution at a temperature above the eutectic one. The refractive index distribution in the active layers of multi-year ice correlates with that of density and is slightly temperature-dependent.
One can likewise observe the absorption peak value to be present in the active layers of multi-years ice at low temperatures.
At negative temperatures the snow samples with density ≈ 0.4 g/cm had relatively low values of specific attenuation, whereas the specific attenuation in ice of the same density and consisting of active layers came up to N≈ 0,6-1,5 dB/cm [59].

52 The temperature of the upper nilas and young ice layers is typically higher than the
eutectic temperature for sodium chloride. As compared to the first-year and multi-year ice, the nilas and young ice are characterized by a high content of brine in the upper layers and great refractive index and specific attenuation-in-ice values (n and N for nilas reached n=3.2 and N = 10,5 dB/cm [53]).
The metamorphic transformations of the snow cover and the upper layers of first-year ice result in generating typical refractive indexes and specific attenuation profiles. The refractive index in the layer of snow frozen up with ice is n ≈ 1.3 and shows a step-wise increase of up to n ≈ 1.9, as the above layer takes up the form of monolithic ice [58].
During the autumn-winter period the electro-physical parameters of multi-year ice differ dramatically from the corresponding parameters of the upper layers of first-year ice.
In contrast to the Arctic region where the ice build-up process occurs at a tangibly negative temperature, the ice sheet that is formed in locked-land mid-latitude seas, say, in the Azov-Black Seas basin over an autumn-winter period is exposed to several thawing and subsequent freezing cycles. Besides, the structural-physical and electro-physical properties of the upper layers are strongly affected by rainfalls and wet snow. Therefore one can observe a great variety of morphological and dielectric characteristics of the ice in the Azov-Black Seas basin. Over the autumn-winter period several cycles of ice development, melting and subsequent freezing may occur. As a result, generalizing the structural-physical and electro-physical properties in above basin is quite a challenging task. This suggests that when interpreting the remote sensing data pertinent to these regions the integrated experimental data mainly need to be utilized.
Fig. 1.20. Distribution of the refractive index n and X-band specific attenuation N in the
upper layers of first-year ice at -12°С (а) and multi-year ice at -14°С (b)

53 The distinctive characteristics of microwave band radio wave sea ice backscattering
The evolution of radar techniques and tools for remotely diagnosing the Earth's ice sheets from aero-space carriers [60-63] are based upon the investigation data and the generalized properties of radio wave scattering by natural ice and upon specially elaborated models that give an adequate description of scattering processes.
The measurement data on the properties of sea ice-backscattered radio waves are indicative of the fact that the return signal intensity is dependent upon an age of ice, its surface status, a season of the year, regional conditions, etc. [64-69].
The experience in exploiting airborne SLR's for ice reconnaissance was generalized in [70]. In these studies the interpretation of images was performed in an observable form with a priori information being involved, and was of empirical nature.
The results from in-situ ice and helicopter-derived measurements of normalized radar cross-section (RCS) over the range of 1 to 2 GHz, 9 to 18 GHz and in a
sector of incidence angles for vertical VV, horizontal HH, cross HV and VH polarizations are discussed in [66, 69].
)(0 θσ00 7010 ≤≤θ
Fig.1.21 presents the plots of [67] for multi-year and first-year ice at 1.5
GHz, 9GHz, 13 GHz and 17GHz for vertical polarization. The behavior of for horizontal polarization is identical to that of curves shown in Fig.1.21. However, the normalized RCS values on the horizontal polarization are by 1 to 3 dB lower than on the vertical one.
)(0 θσ)(0 θσ
The measurement data on of multi-year and first-year ice at 9.6 GHz for vertical, horizontal and crossed (HV) polarizations are indicated in Fig.1.22 [66]. The sea ice normalized RCS data that were acquired during the helicopter-derived measurements [69] are, on the whole, close to the results in [66].
)(0 θσ
As evident from Figs 1.21-1.22, the normalized RCS dependence of multi-year ice upon an incidence angle is weaker than in first-year ice over the frequency range of 9 to 17 GHz. At frequencies between 1 and 2 GHz for the same polarizations the difference in the normalized RCS for first-year and multi-year ice is virtually nonexistent. In the cross- polarization of an emitted and received signal the value of is by 10 to 15 dB lower than the corresponding values for the same polarizations. It should be pointed out that the behavior of for the first-year ice (see Fig.1.22) is similar to the normalized RCS relation for the sea surface.
)(0 θσ
)(0 θσ
Although the experimental data on the energy backscattering signatures are coincident in terms of quality and efficiently utilized in the ice reconnaissance practice, a most challenging task is to generalize the measurements obtained. This is because it is necessary to single out the factors affecting the backscattering characteristics and determine the initial data needed to work out scattering models. For instance, the results from measuring the normalized RCS for ice of one and the same age [64, 66, 69, 71] show a difference ranging between 4 and 10 dB. This is mainly because the parameters of the ice sheet under study are roughly described (in general, ice age and, in some cases, the hummocked nature of ice are referred to) and the calibration of the measuring equipment has some specific features. At the same time, as the experimental data suggest [63], the variations in the normalized RCS may run up to 10 dB and more even for visually homogeneous ice. The results from the in-situ measurements of backscattering signatures were obtained onboard the aircraft-laboratory of an IL-18 aircraft and are discussed below.

54
Fig.1.21. The plots of for the first-year (а) and multi-year (b) ice at )(0 θσ1.5, 9.0, 13.0, 17.0 GHz for a vertical polarization

55
Fig.1.22. The plots of for the multi-year (- - -) and first-year (——) )(0 θσice at 9.0 GHz for vertical (VV), horizontal (HH) and cross (HV) polarizations
The mechanisms for radio wave scattering by natural ice are examined in a series
of theoretical papers by domestic and foreign researchers. However, it should be stressed that a wide variety of electrical properties in natural ice does not allow one to devise a unified model. Therefore one has to take a fresh approach to resolving a particular problem associated with each physical system. Contrary to sea surface that is, in a dielectrically sense, a homogenous medium, with a return signal characteristics being largely governed by the surface's statistic properties, the electromagnetic waves can penetrate into ice to a finite depth. It is for this reason that the scattered signal parameters are influenced by volume inhomogeneities of permittivity.
The thermal self-radiation of a multi-layered dielectric has been investigated in [71, 72], with regard to those ice sheets structures that had undergone changes over years.

56 The curves thus obtained are in good agreement with the results of radio-thermal sensing of the Antarctic ice.
A model describing the scattering process in a dielectric layer bounded by flat slightly rough surfaces that allow using the disturbance method has been discussed in [73]. The smooth variations in permittivity within the dielectric layer are approximated by linear functions.
The transmission of radio-thermal self-radiation of the substrate through an ice layer which is a dielectric with random volume inhomogeneities and bounded by the Kirchhoff surfaces is described in [74]. However, normally the ice surface, as it exists under real conditions, has a wide spectrum of roughnesses, which one has to take into account in devising a particular model.
As seen from [75], a set of radiation transport equations is derived. It describes the electromagnetic wave propagation in a medium exhibiting both smooth variations of permittivity across the dielectric thickness and having irregular boundaries. The behavior of scattering by the surfaces that enclose a dielectric layer may be relatively arbitrary, i.e. it ranges from Kirchhoff scattering to completely isotropic one. A series of analytical solutions has been studied, which makes it possible to assess the effect of the layer's rough boundaries upon the type of a scattered signal.
The influence of volume inhomogeneities in the form of random ellipsoids, chaotically arranged spheres, etc. was dealt with in most of the papers (see, for instance, [76, 77] and the references cited therein). And it should be added that in those papers special attention was given to a layer of an inhomogeneous medium bounded by two parallel planes.
The derivation of transport equations with boundary conditions, which describe wave scattering by a layered medium comprising volume inhomogeneities and random irregular boundaries, is described in [78]. In this paper analytical solutions to a set of kinetic equations are provided for a small and a large number of volume inhomogeneities and anisotropic volume scattering. It is shown that for strong volume scattering the function of intensity distribution by a medium-scattered field is determined by the sum of isotropic and directed components. The second term of function describes the scattering process at the interface. In the absence of the absorption in the medium the isotropic part will be prevailing.
A comparison is made [79] between the results from the numerical solution to the set of the equations of radiation transfer by the dielectric layer with randomly irregular boundaries including attenuation in an ice layer and experimental data [66]. The boundary roughness was described in a Kirchhoff approximation. The selection of damping factor
values (ν ) in a layer and the variance of effective slope angles of the surface ( ) allows one to arrive at fairly good agreement between the calculated curves and experimental dependences [66] for the first-year ice at viewing angles of . The numerical simulation involved the use of the first-year ice dielectric characteristics presented in [40].
−2effγ
00 3020 −≤θ
The results given in [79] are close to those [67] obtained when interpreting the remotely sensed sea ice data at angles close to vertical ones. In [67] the properties of the first-year ice were described by a randomly-rough boundary in a Kirchhoff approximation.
An analytical expression for angular distribution of intensity of the electromagnetic field scattered by a randomly inhomogeneous absorbing and scattering layer whose boundaries are characterized by a wide spectrum of roughnesses is given in [80]. An interface was determined as a superposition of a certain microrough surface that allows scattering by the Lambert law, and of the surface to which the Kirchhoff method can

57 be applied. The analysis described in [80] suggests that the diffuse component of the surface scattering matrix can lead to a reduced steep slope of curve just in the same way as in the case of scattering in a layer bulk. The surface component needs to be taken into account if the absorption in layer is intensive, because the volume scattering does not have a significant impact upon the angular intensity distribution.
)(0 θσ
In [81, 82] the calculation were presented, in which use was made of the expressions for the coefficients of scattering by an infinite randomly inhomogeneous medium. These coefficients were obtained in a Born approximation [83], and the computed data give quite an adequate description of experimental curves of for multi-year ice [69].
)(0 θσ
The methods for solving the problems on radio wave scattering by randomly inhomogeneous media bounded by rough surfaces have been approached in terms of electro-physical and structural-physical properties of ice sheets. These procedures provide an insight into the qualitative features of some experiments with remote sensing sea ice sensing. At the same time, the dependence of the results upon solving a series of ice sheet parameters such as surface roughness, statistic characteristics of dielectric constant fluctuations in an ice layer, etc., which in general are determined phenomenologically, and allow an ambiguous interpretation of the obtained results. The above methods do not make it possible to give a theoretical description of ice cover properties.

58 § 1.4 Features of land surface, vegetation and soil scattering at microwave band
Introduction to the theory of radio wave scattering by the soil-vegetaton system The present-day sustainable utilization of natural resources, the environmental
safety and agriculture-oriented problems play an increasingly important part in the life activity of every human being around the world. To meet the the formidable challenges that stem from these problems one has to resort, more often than not, to remote sensing techniques that can be implemented at microwave frequences. These techniques are derived from the studies into the Earth surface-returned or emitted signals.
The radiophysical methods for exploring the Earth's surface use the relation between geometrical and electrophysical surface and subsurface formation properties and returned signal parameters. It should be noted that a diversity of Earth's surface types gives rise to some difficulties over developing theoretical models, most of which are constructed to describe backscattering from quasismooth surfaces and are inapplicable to analysing the rough ones.
There are three approaches to simulating backscattered radar radiation. The first of them hinges upon the the Fresnel formulas, as the medium is presented in terms of reflection factors for the plane interface. For soils, the limitations of this theory are quite obvious. The second approach based upon the theory of diffraction by rough surfaces uses the small perturbation methods (the size of roughnesses is far smaller than an illumination wavelength). In this instance, the above limitations are due to the fact that the soils in field conditions have a clear-cut regular structure and incorporate inhomogeneous particles of different shapes of disperse and mechanical composition.
The multiple scattering theory [84] appears to be best suited to describing vegetation-covered soils. However, some difficulties arise resulting from the involved mathematical description of the condition of inhomogeneous distribution of dielectric behaviors, distribution of scatterers and other parameters that contribute to a total echo signal.
Therefore our main concern in this particular section is with the analysis of the simplest theretical models and empirical dependences derived from experimental data.
Radio wave soil scattering The study of soils at microvawe frequencies are practically made by using three types of models, specifically, those of Kirchhoff's model, physical and geometric optics (tangential plane technique) and perturbation analysis [8,13,85]. These models taken in a general form are the product of two functions:
σ0pp(f,θi)=Dpp[εs(f),θi] S[(f,θi)], (1.92)
where Dpp is the function that describes the dielectric properties of a medium and depends upon polarization and an incidence angle; function S allows for the surface roughness effect and, in the case of scattering by random isotropic surfaces, is described by an one- dimensional correlation function ρ(ξ) of surface profile h(z) or by the surface roughness spectrum. The correlation function, in its turn, is characterized by a mean-root-square deviation of heights l - σh=ρ′(∅), the radius of their correlation and mean-root-square surface inclination. The correlation radius is determined as a distance at which the normalized correlation function ρ(∅)=1 has the quantity of ρ( ) =1/e. The value of m= σh⎜ρ′′(∅)⎜1/2, where ρ′′(∅) is the second derivative of the correlation function at point ξ=0. In the models, for the correlation function, the Gaussian (ρ(ξ)=σ2
h*exp(-ξ2/ 2),
l
l

59
m= 2 σh/ ) or exponential (ρ(ξ)=σ2h*exp(-l ξ / ), m=σh/l ) forms are most frequently
used. But in reality, use is made of the data gleaned from in-situ measurements of the surface under consideration.
l
The most rigorous models are devised for quasi-smooth surfaces (roads, runways, alkali soils, etc.), which should follow the Rayleigh criterion:
σh< θλ cos8
, (1.93)
where σh is the mean-root-square roughness height; λ is the wavelength; θ is the incidence angle.
In this context the models thus developed are based upon the small-perturbation method at incidence angles of θ >200-300 and upon the Kirchhoff method for the incidence angles close to nadir [13, 86].
The Kirchhoff model that uses the stationary-phase approximation is applicable where the mean curvature radius of surface roughnesses σh is greater than a wavelength:
(2кσhcosθi)2>10 и > 2.76* σhλi; k > 6 (1.94) l l
As far as these surfaces are concerned, the scattering process is of purely
incoherent nature, and the normalized RCS is written as:
σ0pp(θi)=σ0
ppn(θi)=i
i
mmtgR
θθ−∅
42
222
cos2)2/exp()(
, (1.95)
where - )1/)1()()()( +−=∅=∅=∅ ssVVHH RRR εε is the module of the
Fresnel reflection factor at the point of θi =0. This particular model does not show any difference in σ0 for HH (horizontal) and VV (vertical) polarizations. The cross-polarization coefficients are equal to zero σ0
HV=σ0VH=0, because the model does not take account of
multiple scattering. The dielectric function and roughness function are respectively equal to:
Dpp(εs(f),θi)=2)(∅R , (1.96)
S(f,θi)=i
i
mmtg
θθ−
42
22
cos2)2/exp(
(1.97)
As the magnitude (2кσhcosθi)2 decreases, the influence of a chosen form of the correlation function tends to grow. A coherent component in a scattered signal is concurrently observed to emerge and gets augmented. Scattering, as it approaches to zero, becomes purely coherent, and the mechanism of the physical optics model starts to function.
The physical optics model is efficient with a great curvature radius of surface roughnesses and small mean-root-square surface slopes:
m < 0,25 и l > 2,76 σhλi; k > 6 (1.98) lIn this case the scattering process is of noncoherent nature and the normalized RCS is expressed as:

60 σ0
pp(θi)=σ0ppc(θi)+ σ0
ppn(θi)+ σ0pps(θi) (1.99)
Here σ0pps(θi) allows for the contribution of slopes and in real problems it is not used so
often. The first term of the equality (1.99) expresses the coherent component which becomes negligibly small at θI > 100.
The dielectric and roughness functions can then be written as:
Dpp(εs(f),θi)=⏐Rpp(θi)⏐2 (1+sin2θi) + Re[Rpp(θi) R*pp1(θi)] sin(2θi) (1.100)
Rгг1=-2sinθiRгг(θi) / (cosθi+ is θ−ε 2sin ) (1.101)
Rвв1=sinθi[Rвв(θi)(εs+1)-εs+1] / (εscosθi+ is θ−ε 2sin ) (1.102)
S(f,θi)=(k )2 exp(-k0) , (1.103) l ]/)sin(exp[)]!/([ 2
10 nklnnK i
n
n θ−∑∞
=
where k=(2kσhcosθi)2 . It should be noted that the models of geometric and physical optics are applicable over a narrow ( -300) range of angles of radio wave incidence onto an isotropic surface, which is not virtually found in real practice.
θ
In solving the problems of radio wave scattering by small roughnesses (as compared to a wavelength), once the smallness condition of Raleigh parameter P=(2khσhcosθi)2<<1 is satisfied, the small perturbation method is employed [87-89]. The horizontal size of roughnesses l (i.e. the correlation radius) may be arbitrarily large, yet in this particular case they should be somewhat gently sloping γ2
0=h2/ l 2<<1. In the approximation of the small perturbation method the normalized radar cross-
section of a rough surface can be expressed in terms of the scattered-electric field strength E(R) and take the form [89]:
( ) ),(*16/))((4 0
2
0
1
0
21
42021
2 qSFFkESpEpEr pp
pp
ppp ζπ=π=σ (1.104)
where k=2π/λ is the wave number, R is the distance to the surface being irradiated, E0 is the incident-wave field strength close to the surface, p0 is the unit vector of its polarization,
2,1p are the unit polarization vectors of a receiving system;
∫∫ ρρρπ= ζζ22 )exp()()2/(1)( dqiWqS (1.105)
is the spatial energy spectrum of surface roughnesses being described by eq. Z= )(rζ
whereas )()()( rrW ζρ+ζρ is their autocorrelation function, kkq −= 1 is the
scattering vector, k is the wave vector of the incidented field, 1k is the wave vector of the scattered field; 0
1
ppF is the scattering "length", which, in radar terms, is equal to [90]:
])1/()1())(1)[(1)(1(4/1 02
00
1 zzvhhp
p ppvppvvF −−+++−= εε (1.106)
vh,v are the Fresnel coefficients in horizontal and vertical polarizations respectively. It follows from (1.104), (1.105) that scattering by a slightly rough surface is of resonance character: in any specified direction k is scattered only by a single space harmonics of the

61 surface with wave vector )(1 zz qeqq l−= , ze is the unit vector along axis Z being normal-directed to an average plane. Specifically, the radar reflection intensity is provided solely by spatial Fourier surface components (plane surface waves) whose generators are perpendicular to the irradiation direction, while the spatial spectrum is equal to λ/sinθ. The two-scale model is used to interpret the experimental data on radio wave scattering by natural surfaces with a wide spectrum of vertical (h) and horizontal ( ) scales when the applicability conditions are not satisfied either for the small perturbation or Kirchhoff methods. The scattering surface is regarded as a superposition of both small-scale roughness z=ζ(
l
r ) (in order to calculate scattering using the small perturbation metod) and smooth large-scale roughnesses z=Z( r ) with slopes ∇=Г Z )(r and normals
20 1/)( ГГeN z +−= that meet the applicability conditions for the tangent plane
method. As a result, the mean value of normalized radar cross-section can be written as a sum of a specular component and a diffuse one representing the normalized radar cross-section value Nσ for small-scale roughnesses. The value Nσ is defined by formula (1.92)
and the above sum represents a direction-averaged normal 20 1/)( ГГeN z +−= :
NГWГd σ=σ ∫∫ ])(2z)/KNK*N[( (1.107)
The small-slope method [91] is employed to calculate scattering by a surface whose roughness has an arbitrary height and yet is featured by gentle slopes. At P<< 1 the above method allows deriving the formulas that can be used for the small perturbation method . With Р>>1 it leads to the tangent plane method. The first term for the normalized radar cross-section σ of the series constructed (described in [92]) using the small slopes a normal (Gaussian) surface is obtained from (1.104) by formal substitution:
),())(2/1exp()2/(1)( 2222 ρρ−ρπ⇒ ζζ ∫∫ dDqqiqqS zz (1.108)
where [ ]2)()()( rrD ζ−ρ+ζ=ρζ is the structural roughness function.
The local disturbance method [92] enables one to find the solution to the scattering problem as an iterative series that represents an asymptotic expansion in terms of two small parameters such as a typical slope of roughnesses γ0
2=h2/ 2 and their curvature. This method described in [93] was used to compute the corrections made to a brightness temperature and the Stokes parameters of the intrinsic thermal radio emission of a medium bounded by a rough surface. These corrections results from the diffraction by the surface roughnesses.
l
The afore-mentioned computational procedures are applicable to the idealized models of natural media interfaces which can be described by unambiguous smooth functions of spatial variables. In the long run, the crucial role is in fact played by the applicability of one or another scattering model to field experiments. The examination of theoretical models clearly indicate that the normalized radar cross-section magnitude is governed by roughness and dielectric permittivity of a surface being sensed and is dependent upon an operating frequency and an incidence angle of radio waves. The normalized radar cross-section angular dependence has a wide-ranging variation from σ0∼сos3θ for a quasi-smooth surface to σ0∼сosθ for rough surfaces when

62 scattering becomes purely diffuse, as it obeys the Lambert law. Fig. 1.23 shows the angular dependence σ0 of the surfaces with a varying degree of roughness. This dependence was obtained at 1GHz [91], and in Fig. 1.24 the similar curves were plotted at 10 GHz. The wavelength-dependent value of σ0 tends to ease, as the degree of roughness increases. For quasi-smooth surfaces the strongly wavelength-dependent normalized radar cross-section is exhibited over X-band and longer-wavelength ranges (see Fig. 1.25) whereas for very rough vegetation-free surfaces it can be approximated by expression σ0∼λ0...λ-1 [94] even over the above ranges.
Provided that dielectric permittivity is strongly dependent upon the moisture content, expression (1.93) can be used to estimate the soil moisture and its area distribution. It should be noted that the moisture content-dependent value of ε varies as a function of a soil type at frequencies of more than 1 GHz. At frequencies below 1 GHz the soil dependence does not exert any influence. This may be attributed to a decrease in the ratio of soil granule size to a wavelength [95].
According to the data cited in [96], an optimal range to determine the soil moisture content is the operating frequency range between 4 and 5.6 GHz. It is exactly in this particular range that the normalized radar cross-section varies as a function of relative moisture content in a top ground layer:
σn0(dB)=0.148mf-15.96, (1.109)
where mf =ν
ν
cm
100%; mv is the volumetric moisture content, G/cm; сv is the field moisture
capacity.
σ0,dBkσ=1,23kσ=0,4kσ=2,0
0.00 10.00 20.00 30.00
-20.00
-10.00
0.00
10.00
θ0
Fig.1.23. Angular dependence σ0 of the surfaces with a varying
degree of roughness. It is derived at 1 GHz

63
Fig. 1.24. Angular dependences of the normalized radar cross-section for the surfaces with a varying degree of roughness at 10 GHz
Fig. 1.25. Wavelength-dependence of the normalized radar
cross-section for quasi-smooth surfaces The plotted relation σn
0=f(mf) derived at 4.4 GHz and the incidence angle 100 for horizontal radiation and reception polarization is shown in Fig.1.26. This particular dependence allows the moisture content content of the upper soil layer to be measured from the echo signal intensity.

64
Fig. 1.26. Moisture-dependence of the normalized radar cross-section
Vegetation cover masks the soil surface, and in this case the normalized radar
cross-section is read as:
σ0Σ(θ)=σ0
p(θ)+)()(
2
0
θ
θσ
Ln , (1.110)
where σ0p(θ) is the normalized radar cross-section of the vegetation cover; L(θ) is the
attenuation factor of the electromagnetic field in a vegetation layer. At a frequency of more than 8 GHz with θ≥ 300 the specific contribution of the first term is found to be predominant whereas at lower frequencies and at θ = 100 to 300 the second term appears to be noticeable. The findings of the studies that had been made in accordance with the “Seasat-A” and “Shuttle” programs suggested that the SAR facility operating at 1 GHz was capable of detecting the difference between the dry and wet soils [86].
For a frequency range of 4 to 5 GHz the presence of the vegetation cover results in moisture content-dependent value of σ0 being written [97] as:
σ0n(дБ)=0,113mv-13,84. (1.111)
In other words, a decrease in sensitivity ∂σ0/∂m (Fig.1.26, curve 2) is observed. The second factor that does not allow the moisture content to be remotely determined is the surface roughness impact. This is because the normalized radar cross-section is strongly dependent upon the remote sensing roughness height σh (which is vividly illustrated in Fig.1.23).
The productivity of crops is, in general, governed by the moisture content of the biomass of crop A, i.e.
Y=f(A,W), (1.112)
where the soil moistening conditions are determined as [89]
W=0,6 , (1.113) ∑+∑==
n
j
m
iji
xx11
21

65
where is the total amount of precipitation during the autumn-winter period;
is the total amount of precipitation from May through July.
∑=
m
iix
11
∑=
n
jj
x1
2
The situation described above makes it imperative to get some background information both about the initial soil moisture caused by precipitation and snow reserve and about the soil moisture retention throughout the vegetative season.As indicated above, the intensity of soil-scattered signal (the normalized radar cross-section) is the function of roughness and complex permittivity of soil ε, which is related to the volumetric moisture content of soil through the Hallikainen empirical model [98].
The results given in this Subsection suggests that surface roughness masks, to a great degree, the regular variations in σ0 with a changing level of moisture. For instance, as the volumetric soil moisture varies from 0.05 to 0.4 cm3 сm-3 (which corresponds to real conditions), the normalized radar cross-section variation does not exceed 10 dB whereas the varying soil roughness leads to a change in σ0 by 15 to 25 dB. As a consequence, the accuracy of radar technique for determining soil moisture is heavily dependent upon the way of minimizing the surface roughness effect.
In [99] a soil moisture determination procedure is suggested enabling one to reduce the surface roughness effect using a combined multichannel processing of acquired radar images.
In the context of the small perturbation method the normalized radar cross-section is derived from this formula:
)(16 0
240 χαπ=σ Sk pppp (1.114)
where k=2π/λ is the wave number; рр is the polarization (vertical or horizontal); S(χ0) is the spatial surface roughness spectrum.
αHH=(ε-1)/(cosθ+ θ−ε 2sin )2 (1.115а)
αVV=(ε-1)(εsin2θ+ε-sin2θ)/(ε cosθ+ θ−ε 2sin )2 (1.115б) Once relation σ0
HH/σ0VV is taken, an expression thus derived will be the function of
incidence angle θ and dielectric constant only:
R= ),(2
2
0
0
εθα
α
σ
σF
VV
HH
VV
HH == ; (1.116)
22222
222
)sin)(cossinsin(
)sincos(
θ−ε+θθ−ε+θε
θ−ε+θε=R (1.117)

66 The calculation of R as a function of moisture (for incidence angles of 150 to 650)
at an operating frequency of 10 GHz (see Fig.1.27) indicated that the measurement range R at θ>600 exceeded 7.5 dB, as mv varies between 0.02 and 0.4 сm3 сm-3, whereas at θ=200 to 300 and with the same moisture content it comes up to 2 dB. For these angles the expression for R is drastically simplified and can be written as:
, (1.118) )ˆˆ/()ˆ2(ˆ 222 εεε ′′+′′++= ABBARwhere A= cos2θ/(1-sin2θ);
B= 2cosθsin2θ/(1+sin2θ); $ / $′ = ′′ ′′ε ε ε2
5,0222 ]/)([ˆ 2sin)sin ε′−θ+ε ′′+θ−ε′=ε ′′ As the complex permittivity varies with a moisture content value, an error in determining R is less than 0.1% at incidence angles of θ<200 and runs up to ≤0.5% at θ>250. The contribution of an imaginary part of ε ′′ to the magnitude of R for real surfaces is
insignificant and is no more than 1%. The frequency dependence of R is far less pronounced. The computational results
suggest that R tends to vary from 0.5 to 1.0 dB at frequencies between 1.4 and 18 GHz. Thus, in terms of two polarization data and using expressions (1.116) or (1.117)
the soil moisture can be determined to a greater accuracy, i.e. the sensitivity and radar method precision can be enhanced.
Fig.1.27. The estimated values of the soil reflection factor as a function of moisture The soil moisture content and the wavelength are the specifying parameters that
can be effectively used to tackle the problems on radio wave penetration into a soil layer. The depth penetration pδ is the distance beneath the surface where the field
intensity decreases by a factor of e as compared to the incident wave power [100] and can be determined as:

67
ε
επλ
≈δ II
I
p 2 at I
II
εε
<<1, (1.119)
where and are the real and imaginary parts of the permittivity. Iε IIεThe real part of of dry materials in the microwave range is between 1.2 and 6.0,
whereas the value does not often exceed 0.1. Therefore, the penetration depth in dry materials amounts to several wavelengths, but normally it is far great than a wavelength. For a liquid-phase moisture a near-exponential decrease in
IεIIε
pδ terakes place. Fig.1.28 presents the moisture-dependent penetration depth into snow, sand and clay at different frequencies. In Fig.1.29 pδ is plotted against an operating frequency for different levels of soil moisture content [101]. Following the analytical treatment of these parameters one is led to conclude that a layer thickness into which the microwave field penetrates is strongly dependent upon a wavelength, and the optimal frequency range to be used for subsurface sensing is decimetric or longer-wave one.
Fig.1.28. The depth of radio emission penetration into snow, sand and clay as a function of moisture content at defferent frequencies. a – dry (0.025gcm-3); b-wet (0.3gcm-3)

68
δp, m
%H2O 10
0
1 1-2
0.1 2-10
10-2 10-20
10-3
0.1 1.0 10 f,ГГц
Fig. 1.29. The value of pδ plotted against the operating frequency for soil moisture content levels
A great many authors were concerned with solving a problem of radio wave propagation in a layered medium. Specifically, particular emphasis should be placed on the results obtained using the Kirchhoff approximation [67], the small perturbation method [102] and the Born approximation [103].
For the two-layer medium with an upper layer of thickness L and skin-layer depth d(ε2), the normalized radar cross-section (when there is a lower layer with permittivity ε1) in the small perturbation method approximation is expressed as [100]:
σ0пп= T2
i(θ)exp(-θId
Lcos2
)16πk4αpp (2
1
εε
; ;2
ελ
θI)S(2k )sin Iθ , (1.120)
where Т(θ) is the surface transfer coefficient; sinθ=2
ε sinθ'.
The contrast factor (the relation of the normalized radar cross-sections in the presence and the absence of the lower layer) is derived from (1.93) and (1.98):
=σσ=
n
nnR T2i(θ)exp.(-
θ′cos2
dL
));;(
);;(
2
22
1
θ′λα
θ′ε
λ
ε
εα
εpp
pp. (1.121)

69
Fig. 1.30 shows the dependences of R=f(L/d) for two matched polarizations and cross-polarization at 1,2 GHz for an upper layer with ε2=2.5 (dry sand) and a lower layer with ε1=8 (granite rocks). The highest contrast of 3 to 6 dB for the lower layer being observed is seen at a horizontal radiation and reception polarization. As the operating frequences increases, the contrast magnitude decreases.
Fig.1.30. Values of R=f(L/d) for two matched polarizations and
cross-polarization at an operating frequency of 1.2 GHz for dry sand and granite rocks
Radio wave scattering by vegetation covers One can observe a number of specific features that arise in the remote sensing of
vegetation covers using the special-purpose radar systems. The scattered signal intensity is impacted by a particular type of vegetation, density of crops and covering, height of plants, biomass, moisture content and maturity of plants, to say nothing of other factors. The most widespread model to be used for calculating the normalized radar cross-section of the vegetation-covered surface is the model of water cloud [104,105], which was devised both for a one-layer cover and for multilayer types of covers of different crop plants. The model was being refined for frequency ranges of 8 to 18 GHz and 35 GHz.
According to the specific features of the suggested model, the soil-scattered signal gets a two-fold attenuation, as it is passed through a vegetation layer. Moreover, the vegetation layer tends to introduce its component into a scattered signal because of volumetric scattering within it. The soil- and vegetation-scattered signal components can be throught of as non-coherent, and if the contribution is to be neglected due to multiple

70 backreflection in the vegetation layer, then the total normalized radar cross-section of the cover is expressed as:
σ0cov(θ)=σ0
veg(θ)+σ0soil(θ)/L2(θ) (1.122)
where σ0cov is the total normalized radar cross-section of the cover;
σ0veg (θ) is the vegetation normalized radar cross-section;
σ0soil(θ) is the normalized radar cross-section at the vegetation-soil boundary;
L(θ) is the coefficient of field attenuation in a vegetation, being equal to: 1/γ(θ)=1/exp(-katthSecθ), where γ(θ) is the energy transger factor in a layer;
katt is the attenuation per unit length in a layer; h is the vegetation cover height; θ is the incidence angle. As there is no clear-cut air-vegetation layer boundary, the signal component needs not
to be taken account of when it is scattered and passed through the air-layer plane, and scattering by the vegetation layer can be entirely taken as a volume scattering. Component σ0
veg(θ) is expressed in terms of cover height h, attenuation factor katt and η - normalized volume of the radar cross-section according to the water cloud model [104]:
σ0veg(θ)=(ηcosθ)/(2 katt)[1-exp(-2 katthSecθ)]=(ηcosθ)/(2 katt )[1-1/L2(θ)] (1.123)
With the soil moisture level ms≥0.05 gсm-3 a simple expression [106] can be
written for σ0soil(θ):
σ0soil(θ)=[Cn(θ)mn]γ2(θ), (1.124)
where Cn(θ) is the constant for a prescribed wavelength, a type of polarization and a geometrical soil structure. As indicated in [99], Cn(θ) is the function of soil surface roughness. Yet basically, at λ≤ 3сm, Cn(θ) is not roughness-dependent throughout the entire range of surface roughness of the soil that is normally used for crop cultivation.
Thus, an expression for σ0cov (if vegetation is present) can be written as:
σ0
cov(θ)=(ηcosθ)/(2 kз )[1-1/L2(θ)]-[Cn(θ)mn](1/L2(θ))= = (ηcosθ)/(2 kз )[1-γ2(θ)]-Cn(θ)mnγ2(θ) (1.125)
A more general empirical model for scattering by the vegetation cover had been
utilized in [107] and represented a sum of soil surface scattering σ0s , volumetric scattering
by vegetation layer σ0v and the scattering due to the surface-volume interaction σ0
int:
σ0=σ0s+σ0
v+σ0int (1.126)
In this instance the first term corresponded to the method of small perturbation. Here the soil permittivity value included in the expression for the Fresnel reflection coefficient was approximated as follows [108]:
ε’=2.37+4.76 mv+113.14 mv2 (1.127)
ε”=0.06+5.197mv+21.27 mv2 (1.128)

71
The volumetric scattering by the vegetation cover was determined by the empirical dependence based upon using the apdated "cloud model" [109] :
σ0=0.742w(1+0.536wτ-0.237(wτ)2)*[1-exp(-2.119τsecθ)]cosθ, (1.129)
where w= ks/(ks+ka) is the vegetation layer albedo, τ= (ks+ka)*h is its optical thickness, ks and ka are scattering and absorption coefficients respectively; h is the physical thickness of a layer, θ is the angle of electromagnetic radiation incidence. A mean-square error in this expression equaled 0.17 dB and the correlation coefficient ρ2= 0.99. In deriving the above relation the parameter range was 80 ≤ θ ≤ 850, 0.1 ≤ τ ≤ 2.2 Np, 0.01≤ w ≤ 0.5. Under the assumption that in the structure of vegetation the randomly distributed scattering discoid elements (foliage) are dominant, the surface-volume interaction is described by an empirical expression for HH polarization [109]:
σ0int=1.924 w [1+ 0.924wτ+0.398(wτ)2]*[1-exp(-1.925τsecθ)]*
exp[-1.372τ1.12secθ]*exp[-0.836(kσ)2cosθ]*2
HHR cosθ, (1.130)
where 2
HHR is the Fresnel coefficient with a mean-root-square error of 0.23 dB and
correlation coefficient ρ2=0.99. In deriving the above expression the parameter range was 80 ≤ θ ≤ 850, 0.1 ≤ τ ≤ 2.2 Np, 0.01≤ w ≤ 0.9. This type of model is suitable for aboveground vegetation (soya, clover, etc.) For example, if we take ripe maize whose leaves get dry and hold a slight fraction of total moisture in the vegetation cover with respect to dielectric parameters, the scattering dominant elements are the vertically oriented cylinders, and the value of σ0
int is defined by a more general expression:
σ0int=2 exp[-4(kσ)2cos2θ]*exp(-2τsecθ)
2ггR 2
stR , (1.131)
where 2
stR is the effective reflectance of plant stalks, its value being proportional to their moisture content. This particular three-component regression model based upon the radiation transport theory and allowing the coefficient of vegetation cover backscattering to be approximately evaluated (with a root-mean-square error of no more than 1 dB) is presented in [110]. The transport theory approximation was also used in [111] where vegetation appeared as a multilayer medium. The theoretical model thus developed is in good agreement with the measured values of backscattering factor for wheat field at 1.5 and 4.25 GHz. However, this model needs a more precise definition. It should be noted that the term specifying the soil-vegetation interaction plays an essential role at incidence angles of θ>200 only and for a vegetation cover optical thickness of τ ≤ 0.1 Np. This term can otherwise be ignored, thereby leading to a two-component model [112,113], which, as it may seem, provides for a good fit to experimental results [13,114].
The angular dependences of the normalized radar cross-sections that have to be taken into account in determining the vegetation parameters have been thoroughly studied. At a frequency ranging between 1 and 18 GHz, at incidence angles between 00 and 600 the normalized radar cross-sections angular and frequency dependencies can be expressed empirically [115]:

72
σ0(дБ)= (1.132) faaaa eeaaeaa )( 765
432
10)( θ+−θ−θ− +++
The values of coefficients а0….а7 are dependent upon radiation and reception polarization; they are listed in Table 1.2.
Таble 1.2
Polari-zation
а0 а1 а2 а3 а4 а5 а6 а7
HH 2.69 -5.35 0.014 -23.4 33.14 0.048 0.053 0.0051 VV 3.49 -5.35 0.014 -14.8 23.69 0.066 0.048 0.0028
The frequency dependence of σ0 is very weak over a frequency range of more than 4 GHz and is relatively strong at frequencies below 2 GHz. This is well illustrated in Fig. 1.31.
Fig.1.31. Frequency dependence of σ0
At frequencies between 3 and 100 GHz, at incidence angles of more than 600, both the frequency and angular dependencies can be given as:
σ0(θ,f)=A1+A2
fA 10
lg20
90lg
3+
θ−, [dB], (1.133)
where f is in GHz; θ in degrees. The values of coefficients А1 - А3 are listed in Table 1.3.

73
Таble 1.3. Type of surface А1 А2 А3 Concrete -49 32 20 Arable land -37 18 15 Snow -34 25 15 Deciduous and coniferous forest (summer-time)
-20 10 6
Deciduous forest (winter-time) -40 10 6 Grass-covered meadow >0.5m -20 10 6 Grass-covered meadow <0.5m -28 10 6 Buildings -8.5 5 3
In the short-wave part of cm-band and mm-band (with no influence of soil) one
can observe a high correlation between the normalized radar cross-section and a total vegetation biomass. For instance, the correlation between σ0 and the biomass exceeds 0.9 at 11 GHz for incidence angles of more than 300. An increase in biomass by 0.4 Kgm2 gave rise to the normalized radar cross-section growth by 3 dB [86].
There exists a seasonal dependence for the normalized radar cross-section of vegetable cover, which is governed by a change in biomass and plant's moisture content. A high correlation between a seasonal variation both in vegetation moisture content and normalized radar cross-section (see Fig.1.32) is observed. The seasonal changes in the normalized radar cross-section allow one to classify crops and determine the ripening and harvesting periods.
During the germination period and in the early stages of plant development the normalized radar cross-section magnitude increases with time due to a growth in the volume and biomass of vegetation cover until the latter comes to full maturity. Subsequently the crops lose part of their foliages and a larger portion of moisture content, and this leads to a decrease in backscattering. Therefore the regular observations of the plant growth during the vegetation period make it easy to keep track of their development.
Fig.1.32. Seasonal variations in vegetation moisture content and the normalized radar cross-sections

74 In terms of biomass, the cross-polarization is held to be the most informative. It
also allows one to classify agricultural structures. By way of illustration, Fig.1.33 shows the dependences of σ0 upon a particular type of crop. The values of σ0 are dependent at 1.6 GHz in the horizontal transmission and reception polarization (Fig.1.33a) as well as the cross-polarization (Fig.1.33b).
The two-polarization measurements make it possible to classify the types of cultivated crops by eliminating an ambiguity inherent in single polarization interpretention [13]. Fig. 1.34 shows the results obtained from classifying a corn field, bare fallow land and pasture areas at 5.6 GHz. Using the cluster analysis and multifrequency radar output data makes the classification procedure more reliable.
Fig. 1.33. Dependence of σ0 upon the type of crop
Fig.1.34. Results of crop classification

75 On some peculiar aspects of radar investigation of snow-covered areas The processes that proceed in the reflection from snow-covered ground are similar to vegetation scattering. A snow layer is made up of ice crystals in the air medium. As a result, in this particular case, volume scattering takes place as well. Besides, the surface reflection at the air-snow, soil-snow interfaces can have a certain effect [116].
In the general case, when there is no multiple scattering, the normalized radar cross-section of snow cover is given by [117]:
),()()()(),( 0
2
2000 θσ
θθθσθλσσ ′′′
+′+= sss
vsss Lj
( 1.134)
where is the normalized radar cross-section of surface scattering at the air-snow
interface;
( θλσ ,0ss )
( )θσ ′0vs is the normalized radar cross-section of volume scattering in snow;
is the power transfer factor at the air-snow interface; ( )θ ′2ssj )(θ′L is the field attenuation
factor in a snow layer; ( )θσ ′0s is the normalized radar cross-section of a soil layer beneath
the snow cover. Angle θ′ is related to incidence angle θ via the expression
;sinsin θεθ ′= s sε is the snow permittivity. The normalized radar cross-section value in terms of volume scattering and the attenuation factor in a layer are determined by relations [116]:
,cos))(
11(2
)()( 220
⎥⎦
⎤⎢⎣
⎡′
−′=′ θθ
ηθθσLk
jssvsl
( 1.135)
)secexp)( θη(kθL ′=′ l , where - is the attenuation factor. The other terms in (1.135) are dependent upon the snow cover condition and, primarily, by the water content in the snow cover, i.e. by the water water coefficient
lk
hw sρ= (density multiplied by a snow depth).
Since the dielectric constant of dry snow ( 6.1≈ε ) is slightly different from that of the air with the exception of near-vertical (nadir) angles, one can overlook the contribution to a total signal of air-snow interface scattering or, in other words, the value of
can be taken as equal to ( θλσ ,0ss ) 0≈ in (1.134). In this case, the normalized radar
cross-section of snow is governed by the volume scattering of snow cover and reflection from the snow-soil interface. The normalized radar cross-section of dry snow is related to its water-containing equivalent via the empirical expression [118]:
),secexp()( 0000 θσ ′−−= WCBAW (1.136)
where are the coefficients that are operating frequency-, incidence angle- and polarization-dependent.
000 ,, CBA
The first term in (1.136) specifies the normalized radar cross-section magnitude of a semiinfinite snow layer when >> 1. In addition, for dry snow can be
assumed
θρ ′∗− sec1wkl s
( )θ ′ssj ≈ 1. Then the following expression can be derived from (1.134) and (1.136):
(1.137) )secexp()()( 00
000 θσσ ′−−−= WCAAW n

76 The above expression allows evaluating the normalized radar cross-section of snow cover in view of the underlying ground surface effect, if the attenuation factor in the snow layer is not too great, because:
20 /1)secexp()(
0
0LWCW
s
=′−=∂
∂ θσ
σ (1.138)
The values of plotted against the water-containing equivalent (see Fig.1.35) were calculated using (1.136) and presented [119]. They are in good agreement with the experiment described in [120] and indicate that, as the snow cover depth and its water-containing equivalent increase, the normalized radar cross-section tends to the limited value. This process is due to the fact that the lower soil layer produces no impact upon the scattered signal intensity. As the operating frequency increases, the value of tends to grow from 7 to 10 dB.
0σ
0σ
The second feature of backscattering by the dry snow is the relationship between the normalized radar cross-section and size and shape of ice crystals. This dependence stems from the theoretically grounded volume scattering models. Specifically, in the update version of the Born model [121], which excludes an assumption about the low density of particles, the normalized radar cross-section can be expressed (assuming the particles to be spherical) as:
,)21(375,0
222
30
rkar
+=σ ( 1.139)
Fig.1.35. The plot of as a function of the water-containing equivalent 0σ
where k is the wave number; r is the radius of an ice crystal; a is the coefficient that is dependent upon a wavelength, radiation polarization and electrophysical properties of snow. In this instance the derivative

77
322
4220
)21(5,1
rkrakar
r +−
≈∂σ∂
(1.140)
is positive at r< πλ
46 . As will be apparent from examination of (1.140), over the
microwave range at , one could observe the critical dependence upon the ice
crystal size to be nearly proportional to
12 22 <<rk3r . This dependence persists up to the wavelength
of r5>λ , i.e. it is not valid at mm-band only, because the crystal maximum size is of the order of 1 to 2 mm.. The influence of snow-soil interface backscattering can be taken into account using the standard techniques suggested in [84,94]. The contribution of above-mentioned term in formula (1.134) is found to be dramatically different depending upon the level of soil cover roghness, wavelength and snow depth. In the short-wave portion of the X-band the impact of soil seems to be rather slight and the normalized radar cross-section is determined only by volume scattering in the snow sheet. For the wet snow whose dielectric constant tends to increase apprecciably due to the presence of water in a liquide phase, the surface scattering by the air-snow interface cannot be ignored, i.e. . In some cases this scattering tends to be prevalent in terms of generating a total scattered signal.
00 ≠ssσ
An expression for the normalized radar cross-section of the snow sheet can be given as [13]:
],sec)(exp[])exp([)exp(),(
0
000
00
θβσαασσ
′+−∗−−−−+=
WmCmAmAmW
v
svvssv (1.141)
where α and β are the operating frequency-dependent coefficients (see Table 1.4).
Table 1.4. Частота, GHz 8,6 17,0
Angle of incidence 200 500 200 500 С0
β α Ф( / ) 2m 2m
0sσ (dB)
0.0344 0.143 0.802 0.63 -17
0.0198 0.0932 0.910
0.2 -25
0.0273 0.872 1.387 1.26 -17
0.0373 0.0522 1.372 0.63 -23
As seen from (1.141), an increase in liquid water content brings about a sufficiently rapid decrease in the normalized radar cross-section of snow, which is clearly demonstrated in Fig.1.36.
According to this dependence, with 4% to 5%, the rate of variation in is noticeably reduced. This is attributed to significant field attenuation, because the free water is present in the snow, and this particular phenomenon results in surface scattering becoming prevalent.
≥vm 0σ

78
Fig.1.36. The value of as a function of volume snow moisture content 0σ
The constraints of the model thus discussed consist in that it can be applied at X-
and longer radio wave bands. The experimental studies that have been made in the short-wave portion of the mm-wave range [122] indicated that the normalized radar cross-section magnitude of wet snow is essentially independent of the ice crystal size distribution. This magnitude is highly sensitive to the root-mean-square height of snow cover roughness hσ and slightly less
sensitive to volume moisture content of . Using the linear regression we arrive at the
following dependence of : vm
0σ
σ0=Со+С1cosθ+C2σh+C3mv (1.142)
The values of the coefficients included in the above expression are listed in Table 1.5.
Table 1.5 Polarization С0 С1 С2 С3
Vertical Horizontal Circular (right –right-hand)
-21.6 -20.6 -18.8
11.8 7.1 7.1
6.1 5.8 6.0
-0.6 -0.15 -0.29
The value of varies from 4 dB to 7 dB, as 0σ hσ ranges within 1mm, whereas the
variation in within 4% leads to varying between 3 dB and 5 dB. vm 0σ
Features of radar subsurface sensing The radar methods offer a large variety of specific capabilities and are useful for
tackling different remote sensing problems, especially in exploring the environment. One of the promising trends in radar remote sensing is the surveillance of different structures and objects beneath a soil layer. This is achieved owing to the penetrating power of waves from the long-wave part of the microwave band. Specifically, since the typical radio wave penetration depth for most of the soils is ε ′′πε′λ=δ (here λ is the wavelength,

79 ε ′ and ε ′′ are the real and imaginary parts of permittivity of soil, the value of δ for dry sands may come up to several tens of meters in the long-wave part of microwave band.
A great diversity of subsurface sensing issues calls for different approaches to their practical solutions. A highly extensive use is made of radar subsurface sensing in the vertical irradiation (a radioaltimeter mode) is meant that permits the thickness of layered media to be measured [123]. In this case the vertical radar sensing can be performed using either superwide-band short radio pulses or complex frequency- or phase-code-modulated signals.
A series of individual experiments involving the use of radar space-borne systems, for instance, the subsurface structures in the area of the Sahara desert and across the expanses of Saudi Arabia were surveyed by means of the SAR of EOS Seasat, SIR-A,B [124-126]. It was thus confirmed in practice that the side-looking radar mode could be helpful in extracting information on geological structures lying under a layer of sand.
In terms of detecting subsurface objects and structures, the simultaneous multifrequency radar sensing is of certain interest, at least, over the VHF- and UHF-bands where the depths δ of radio wave penetrating into soil are great, but essentially different.
At present there does not exist an unambiguous physical model capable of adequately describing radio wave scattering by various objects under a soil layer. Below (see Fig.1.37) is given a simplified version of the model for interpretating the data provided by multifrequency SARs.
In subsurface sensing of objects (G) the radar signals are generated due to the joint influence of several factors such as scattering by roughnesses of the air (medium1) – soil (medium 2) interface; scattering by terrain irregularities; reflection from object G lying under the surface at a depth of H; wave diffraction and scattering by the surface roughnesses of object G itself, etc. As the decimetric, metric and longer wavelengths are used for subsurface sensing, the volume scattering can be ignored, because the particle size of soil fragments and a distance between them are far less than a radio wavelength. For relatively large and "smooth" (on a wavelength scale) objects G, one can likewise neglect the diffusion and diffraction components of a G-scattered signal by making allowance for specularly reflected waves alone.
Fig.1.37.The schematized generation of subsurface "strong" reflections

80 If the Z=-H plane interface of two homogeneous media 2 and 3 acts as subsurface
object G, then the normalized backscattering cross-section G shows a K-fold increase as compared to section of scattering by the terrain irregularities. For a horizontal
polarization of a sensing signal the contrast factor is given by [127]: SG
hK
4
1
1~1
~1RR
RKS
h ++
==σσ
, (1.143)
and for a vertical polarization it becomes VK2
21
22
22
11
)~1(cossincossin~2~1
RR
RRKV +
Θ+ΘΘ−Θ
++= . (1.144)
where 1
~R is the exponential factor, whereas R and are the Fresnel coefficients of polarized-wave reflection from the interfaces of media 1-2 at
1R0=Z , and from those of
media 2-3 at HZ −= respectively. A distinctive feature of the above formulas is that their contrast coefficients K are found to be roughness parameter-independent and, in particular, of their energy spectrum W, although a radar signal differing from zero (at 0≠Θ ) is observed solely due to resonance (selective) scattering [77] by rough grounds Z=S(x,y). The layer thickness dependence H is included in these formulas as exponential factor 1
~R :
Γ−Φ− === iikHi eReReRR 1)(2
1111
~ βαϕ ; (1.145)
Θ−′≈Θ−= 22 sinsinRe εεα ;
Θ−′′′≈Θ−= 22 sin2/sinIm εεεβ , where βαεεεε KHkH 2,2,Im;Re =Γ=Φ=′′=′ , and at the same time the
absorption in a medium is relatively slight ( ′′ε << . It is easy to notice that
and are the oscillating functions not only of H, but also of incidence angle and
wavelength
)sin 2 Θ−′ε
hK VK Θλ. Special attention was focused on this particular fact in [128] where a
solution to the problem of scattering by a layer with two rugged boundaries was found. In terms of these parameters, the oscillation periods λ∆∆Θ∆ ,,H are determined from the condition π2=∆Φ whence it follows:
Θ−′=∆ 2sin2/ ελH , (1.146)
ΘΘ−′=∆Θ 2sin/sin 2 Hελ , (1.147)

81
Θ−′
=∆
2sin2 ελ
λλ
H. (1.148)
The maximum contrast value on a horizontal polarization
42
max cossin1Θ
Θ−+=
εhK (1.149)
occurs when there is no attenuation )0( =β in the reflection from a perfectly conducting
medium )1,( 11 −≈′>> Rεε under the resonance conditions as:
πε )21(sin 2 +=Θ−′ nkH . (1.150)
With the above relation (1.150) being satisfied, the direction of backscattering coincides with that of one of the spatial-angular interference maxima in medium 1, which result from multiple scattering by interfaces Z=0 and Z=-H of refracted plane waves in medium 2. Generally speaking, formulas (1.143) and (1.144) are derived due to the fact that an infinite number of these reflections was taken into account. Yet a power expansion of parameter allows one to obtain formulas for K, which include whatever finite number of reflections. Specifically, if in medium 2 a wave becomes strongly attenuated, as it propagates forward up to the layer boundary Z=-H and backward
1~R
)12( >=Γ βkH , or if
reflection factor from boundary Z=-H is relatively small (which takes place at 1R
ε ε1 − << ε ) or, eventually, the linear dimension of reflector G in the incidence
plane is lesser than a distance
GL
Θ−′Θ=′ 2sin/sin2 εHMM between two successive beam reflections from the plane Z= -H, then in using (1.143) and (1/144) one can take account of only single reflections from G. As a result, can be given as: hK
hhh KKK δ+= , (1.151)
)(4;41 1,212
1,212 ΦΓ−Γ− =+= i
ehh eTRReKTReK δ , (1.152)
where is the factor of reflection from boundary Z=0 of the wave incident upon it from the side of medium 2:
1,2T
Θ−+Θ
Θ−=
′+′
=−=2
2
1,2sincos
sin221ε
ε
zz
z
KKKRT . (1.153)
The formula for the contrast coefficient K on a vertical polarization has the form:

82
)cos)(sincos(cos
)coscos(sincos222
2
1,2Θ′+ΘΘ+Θ′
Θ′Θ−ΘΘ′=→
εεQT . (1.154)
In (1.153) and (1.154) the angle of refraction Θ′ is a complex one and it is
governed by the Snellius law: ε/sinsin Θ=Θ′ . The calculation of contrasts based upon these formulas also include two more types of waves in a radar signal
along with the waves scattered right at the interface Z = S(x,y). As a consequence, the so-called backscattering enhancement occur [129]. It is precisely for this reason that coefficients 4 appear (rather than coefficients 2, as one might have expected in noncoherent composition of wave intensities). Interference of these waves with a wave immediately scattered at interface
VhK ,
ζ=Z (as it does not propagate into medium 2) leads to the
appearance of the term hKδ in formula (1.151) that oscillates in parameters λ,,ΘH with
oscillation periods ((1.146)-(1.148). The peak value of is reached at hK ε → ∞ (in this
case object G is not a metallic sheet of size λ << <<L MMG 1 , which is lying at a depth H in a homogeneous medium with permittivity ε ). Here the reflection factor
for horizontal polarization and 11 −=R 11 =R for a vertical one. Ignoring an absorption
in medium 2 (Г<<1) and considering that ( ) 2max1,2 =T (at 1>>ε ), it is easy to make the
following estimates:
8K17K MAXhMAXh =δ= )(,)( , (1.155)
i.e. the maximum possible magnitude of contrast is equal to 25 or 17.7 dB. hK If only single reflections from short-in-extent underground objects are taken into account, then these high values of contrast are observed (objects that are not so extended ). They may appear at a relatively small wave attenuation in layer 2 when inequality
1MMLG <
1kHkHΓ <<Θ−ε′
ε ′′=β=
2sin2 . (1.156)
is satisfied. The typical frequency-dependent values of ′ε and ′′ε are shown in Fig.1.38
[130]. The value of ′ε exhibits a monotonous decrease with frequency over a wide frequency range between and Hz. As far as f-dependent 610 910 ′′ε is concerned, it offers a more pronounced feature: a decrease in ′′ε at to Hz results in a substantially reduced attenuation over L- and VHF-band wavelength ranges. The particular values of
810 910
′ε and ′′ε are basically moisture-dependent [131]. Expressions (1.152), (1.153) and (1.154) were used to obtain calculated
dependences of the mean values of contrast factors hK and vK for two sensing signal polarizations at two (23cm and 180cm) wavelengths (see Fig.1.39, 1.40)

83
Fig.1.38.Typical frequency dependences of real ( ′ε ) – 1 and imaginary ( ′′ε ) –
2 parts of soil permittivity in the microwave range (see the data in [130])
The calculations of the contrast of metallic plate reflections under a layer of sand ( 01023 ,,, =′′=′ εε ) indicate that in the horizontal polarization the values of hK with a
sector of angles °°≈Θ 80 to20 are considerably higher than in vertical polarization of
vK . The contrast hK is weakly dependent upon an incidence angle of whereas Θ vK
has a deep minimum close to the Brewster angle BΘ=Θ , where . )1/(sin2 +′′=Θ εεB
As will be seen from (1.154), at 0=′′ε and BΘ=Θ , the value of and,
consequently,
0=Q
vK =1, i.e. the contrast is totally nonexistent. The mechanism of the above processes that have been briefly discussed allows
evaluating the possibility of observing the objects that are located in a soil layer and capable of generating the "intense" reflections along with surface scattering. In this version a buidup in the radar potential to increase a detection depth produces no result.The reasony why it so happens is that, as the reflections from a subsurface object become identified, the intensity of reflections from a surface increases in a similar way. n the variant of a plane upper boundary [127] an increase of the potential results in an increased detection depth. This tends to be important in terms of detecting geological structures or objects lying under a layer of soil, because in some instances, say, dry sand ( 01.02 i−=ε ) these structures can be found at a considerable depth. In other words, they can be observed with no distorting effect of a cultured layer. The extension of the SAR range up to the HF band makes it possible to penetrate into the sand-covered structures for greater depths. However, this does not allow extending the range of observation depths for clay soils whose parameters are given in Fig.1.38. As evident from Fig. 1.41, the depth of a skin-layer for clay increses with a wavelength between 10 and 200cm, and a further growth in the penetration depth of an incident wave is restricted.

84
12
10
8
6
4
2
0
hK ,dB
a)
vK ,dB 12
10
8
6
4
2
0
12
10
8
6
4
2
0
hK ,dB
vK ,dB 12
10
8
6
4
2
0
0 20 40 60 80°Θ
0 20 40 60 80°Θ
0 20 40 60 80°Θ
0 20 40 60 80°Θ
b)
c) d)
Fig.1.39. Calculated dependences of the contrast factors of horizontal hK and vertical VK
polarizations upon an incidence angle Θ over the wavelength range of 0.23m (a,b) and 2m (c,d) for different depths (type of soil is sand); curves (a,b) correspond to - h=1 m, 2 - h=2m, 3 - h=3m, curves (c,d) are for 1- h=5 m, 2 - h=10m, 3 - h =15m
10
8
6
4
2
0
hK ,dB 10
8
6
4
2
0
hK ,dB
0,01 0,1 1 10H,m
0,1 100 1 10H,m
a) b)
Fig.1.40. Calculated dependences of the contrast factors of horizontal polarization hK upon
the depth of reflectors H at °=Θ 50 for 0.23m (a) and 2m (b) wavelengths for sand (1) and clay (2) respectively

85 I
2
1.5
1
0.5
0
δ,m
103 108 109 f,Hz
Fig.1.41. The calculated curve of penetration depth into clay with due regard for the data given in Fig.1.38. It is seen that δ does not grow with an increasing wavelength
≥λ 3m
In the following chapters of the present book a series of examples are presented showing the use of radar remote sensing techniques intended for the observation of natural formations and man-made subsurface facilities lying under the earth's surface, i.e. under a weakly absorbing layer.

86 CHAPTER 2. AEROSPACE RADARS OF ON-LINE REMOTE SENSING OF THE
EARTH
The two last decades of the 20-th century and the beginning of the current century have turned out to be the long-waited fortunate landmarks for remote sensing scientists and practical experts who were genuinely hopeful that radar facilities would ultimately find their merited place in aerospace systems. Indeed, their cherished dreams started coming true. In the 80's and early in the 90's of the last century a series of successful experiments had been conducted to dispel much of the atmosphere of distrust that prevailed both among some high-ranking officials and a whole host of the military, environmentalists, geologists, weathermen, etc. We can safely claim that a top-priority emphasis is now being placed upon developing multi-purpose radar systems and remote sensing techniques.
This was clearly evidenced by the events that developed in 2008. A series of civil and reconnaissance satellites demonstrated their excellent performance while in orbit round the Earth. They incorporate high-tech remote sensing radar systems of the following type: RADARSAT -1,-2 (Canada), ENVISAT (ESA+USA), ERS-1,-2 (ESA), ALOS (Japan), Lacross-2,…-5 (USA), TerraSAR-X1, Sar-Lupe-1…-5 (Germany), COSMO-SkyMed (Italia), TECSAR (Israel), JianBing-5 (China) etc. The development work on other Earth observation satellite (EOS) radars is nearing completion: TerraSAR-X2, Discover-2, Radar-1 (USA), IRS-3 (India), Almaz-V, Kondor-E (Russia), etc.
This sharp turnabout in the attitude of the governmental agencies towards the radar applications in highly industrialized and developing countries could hardly take place all by itself. The cause for the cardinal reversal of set views on the conventional radars was that the experimental aerospace remote sensing radars designed and developed in the 80's and early in the 90's of the last century were the first to produce those really impressive results. We feel extremely pleased to see that these ground-breaking advances in implementing remote sensing programs were made by Ukrainian scientists and engineers.
In reality the USA man-made "SEASAT" facility that was put into orbit in 1978 ushered in a new era of the Earth exploration from space carriers using radar remote sensing techniques. This system was equipped with onboard side-looking synthetic aperture radar (SAR). The SEASAT SAR was operated at L-band (λ ≈ 23 cm). It allowed a 100-km swath of the Earth's surface to be surveyed in a 25-m space resolution. The raw data coming in from that SAR were downlinked via a special wide band radio line to the Earth where radar images were synthesized over some period of time.
The onboard integrated SEASAT SAR system was originally used to try out a scatterometer, i.e. a special-purpose two-antenna low-space resolution of ∼ 50 km. The radar was operated in a swath width of ∼ 500 km and over the X-band wavelength range (λ ≈ 2 cm). Its operational purpose was to measure the near-sea surface wind (its velocity and direction) over the World Ocean expanses.
The SEASAT SAR was the first space tool to be utilized to address a number of successful remote sensing experiments with the sea surface and its different formations, glaciers and land. The results thus obtained have strongly suggested that remote sensing of the Earth from spaceborne radars can be highly efficient in terms of solving a broad range of scientific, reconnaissance, nature protection and other issues.
We regret to say that the SEASAT satellite acted as a purely experimental device which was not geared to handle application problems. Moreover, it developed an operational failure within 3 months after it had been flown into orbit.
The following successful remote sensing experiment that was carried out in 1981 with the SIR-A SAR installed aboard the Columbia Shuttle turned out to be of still shorter duration (it lasted 5 days during the Shuttle second mission). In terms of the performance attributes, the SIR-A SAR was slightly different from those of the SEASAT SAR and could

87function at the same L-band; the space resolution it provided was ∼ 37 m whereas its swath was equal to ∼ 55 km. During this mission close attention was given to examining the possible ways of radar-oriented detection of manifest geological structures and subsurface formations. As L-band waves have the property of penetrating deep into the dry soil, the SIR-A SAR proved to be capable of detecting subsurface formations of this kind for the first time: in the Sahara desert, for instance, very old dry sanded river beds were discovered.
The most spectacular scientific and practical results from remote sensing radar operations were achieved in 1983 by means of the pioneer satellite "Cosmos-1500" equipped with routine wide-swath systems, i.e. with side-looking radar (SLR) and an optical multichannel scanner. This particular satellite was originally employed to provide for real-time radar data handling and transmit it along with optical data directly to numerous users.
In following sections of the present Chapter we will scrutinize the performance characteristics and design features of this particular system. In this context the only thing we would like to focus on is that the engineering concepts used in developing the "Cosmos-1500" might be as well be regarded as genuinely "revolutionary". This is remarkably evidenced not only by the ground-breaking developments of the system's assemblies and all kinds of built-in units but also by a close linkage of SLR parameters with the issues to be tackled. All this was clearly indicative of the "Cosmos-1500" practical values and its world-wide recognition.
The entire history of the space-based remote sensing systems evolution can be roughly divided into two stages. The first one is relevant to developing pioneer, purely experimental RS facilities and performing numerous pilot operations with their use in an effort to find out the potential scope of different problems these RS systems can solve. The second stage is to work out the strategy for a new generation of more efficient radar systems for a variety of their practical applications.
A certain idea of the spaceborne remote sensing systems that bear upon their initial evolution stage is given in Table 2.1 that contains the data on the systems fired into space 1978 through 1991.
Throughout the 80's of the 20-th century three major remote sensing systems for remote sensing of the environment had been designed and developed and later thoroughly tested, specifically, scatterometers, SARs of the first generation and SLRs. The scientific literature presents a good coverage of the principles and structural features of these systems [132-134]. Those readers who wish to get a deeper insight into issues are advised to refer to these fundamental works. Herein we will briefly set out some basic features of these systems which have a dramatic effect upon their informative potential and typical aspects of their remote sensing applications.

88 Table 2.1
EOS, type of radar system
Year of
launch
Active opera-
ting time
Inclination and
orbit altitude
Radar operating frequency,
polarization
Space resolution
Swath Data processing
Seasat-A SAR scatterometer
1978 3 months 1080/750 кm
1.275 GHz/HH14.6 GHz,/V,H
25 m 50 km
100 km 500 km
Onground Onground
Shuttle Columbia SAR SIR-A
1981 5 days 40.30/252 кm 1.275 GHz /HH 37 m 55 km Onground
Cosmos-1500 (Оkean-ОE№1) SLAR
1983 2 year 8 months
82.60/650 кm 9.5 GHz /VV 0.8 х 2.5 km
475 km Onboard
Shuttle Columbia SAR SIR-B
1984 7 days 570/350 кm … 225 кm
1.275 GHz /HH 25/17…58 m
50 km Onground
Cosmos-1602 (Оkeаn-ОE №2) SLAR
1984 1 year 82.60/650 кm 9.5 GHz /VV 0.8 х 2,5 km
75 km Onboard
Cosmos-1766 (Оkеаn-01№1) SLAR
1986 2 years 1 month
82.60/650 кm 9.5 GHz /VV 0.8 х 2,5 km
475 km Onboard
Cosmos-1869 (Оkеаn-01№2) SLAR
1987 1 year 5 months
82.60/650 кm 9.5 GHz /VV 0.8 х 2,5 km
475 km Onboard
Cosmos-1870 SAR
1987 2 years 600/260 кm 3.0 GHz /VV 25 m 20 km Onground
Lacrosse-1 1988 8 years 570/680 кm 9.5-10.5 GHz * 1(0.6) m, 2-3 m, 3-10
m
2х2 km, 5х5 km, 100 km
Onground
Оkеаn-01 №3 SLAR
1988 10 months
82.60/650 кm 9.5 GHz /VV 0.8 х 2,5 km
475 km Onboard
Оkеаn-01 №5 SLAR
1990 1 year 4 months
82.60/650 кm 9.5 GHz /VV 0,8 х 2,5 km
475 km Onboard
Аlmaz SAR
1991 1 year 5 months
600/260 кm 3.0 GHz /VV 25 m 20 km Onground
Оkеаn-01 №6 SLAR
1991 2 years 7 months
82.60/650 кm 9.5 GHz /VV 0,8 х 2,5 km
475 km Onboard
Lacrosse-2 1991 To the present
time
570/680 кm 9.5-10.5 GHz * 1(0.6) m, 2-3 m, 3-10
m
2х2 km2, 5х5 km2, 100 km
Onground
ERS-1 SAR scatterometer
1991 7 years 98.50/780 кm 5.3 GHz /VV 5.3 GHz /VV
30 m 50 km
100 km 500 km
Onground Onground
* - quuss data

89Side-Looking and Synthetic Aperture Radar (SLR/SAR) Systems
A common feature that brings both of the above-mentioned radars closer together is how their space resolution bins are formed in a direction perpendicular to the flight path
(a range resolution or in the so-called elevation plane). At the same time another distinguishing feature of these radars is that they offer a specific way to provide the space resolution in a flight direction. Fig. 2.1 presents a schematic sketch of space resolution bins both for SARs and SLRs.
Fig. 2.1. Viewing of an underlying surface by the SAR (solid lines)
and SLR (dashed lines) modes
For both of the cases in point the across-track space resolution is provided by the radar-emitted microwave pulse length and amounts to сτp/соsΘ, where c is the velocity of light, τp is the radio pulse duration, Θ is the grazing angle for each bin. Thus, in order for a high a cross-track space resolution to be secured, the radio extremely short pulses have to be employed. As evident from Fig 2.1, the across-track space resolution for the SAR and SLR modes is found to coincide. Yet the along-track space resolution for the SLRs is determined by the size (along the flight path) of a spot illuminated by a radar antenna on an underlying surface. Therefore, to provide the along-track SLR high space resolution one has to fall back upon the antennas having a narrow pattern in the azimuth plane. In fact, this does imply that that the along-track antenna dimension should be large. Clearly, it is always

90 quite a challenge to install big-size antennas, particularly when dealing with space-based vehicles. The straightforward geometrical calculations suggest that if a 1-m space resolution needs to be implemented, an X-band radar placed in an orbit of ∼ 650 km has to be fitted with an antenna of ∼ 10 km long, which is practically unfeasible.
In order to realize a high along-track space resolution a dedicated antenna aperture synthesizing technology has been developed. This is schematically depicted in Fig. 2.2.
Fig.2.2. Along-path SAR synthesizing procedure The synthesizing procedure, if expressed in simple and brief terms, calls for periodic
recording of amplitudes and phases of all received radio signals during the flight of an aerospace vehicle (aircraft, space satellite, etc.), which carries an antenna of relatively small dimensions. The signals extracted over a flight path stretch referred to as the synthesizing-antenna length are subsequently processed in a certain fashion. In the simplest case for each across-the-track line resolution bin the received signals are summed up (in a vector form, i.e. with amplitudes and phases being taken into account). As it takes place, each element of an underlying surface is estimated with due regard for the time-varying slant range to it. At the same time special filtering procedures and other operations are performed. As a result, a target positioned in a radar viewing zone appears to be virtually observed by a very large antenna whose size is equal to the synthesizing length, and in this case a space resolution in a flight direction, which corresponds to its synthesized dimensions, is performed.

91The above technology was found to be remarkably efficient and nowadays allows
implementing a very high SAR space resolution which can hardly be obtained for the SLRs.
However, to ensure that the synthesizing procedure is adequate it is necessary to: • make use of coherent radiation, i.e. the stability of a radiated-signal frequency
should be such that there might be no unaccounted variations in a radiated-signal phase throughout the synthesizing period (i.e. during the flight time of a synthesizing interval);
• take account of all the instabilities of a carrier flight both in velocity and deviation from the rectilinear path (to an accuracy exceeding 1/8 of a radiated-signal wavelength);
• allow for the velocity and the direction of a moving target; • take account of the time-varying signal propagation conditions on a air track
(variations in the propagation velocity, the multidirectional nature of a track, etc.) to a target, this being most critical for the satellite SARs from which the signals travel through the upper layers of the ionosphere that experience considerable space variations of the charged-particles concentration.
Should these conditions are not satisfied, uncontrollable changes in the echo signal amplitude or even a total destruction of synthesized images of an underlying surface are likely to follow.
At this point our expert readers should remember that in dealing with a broad range of issues pertaining to remote sensing of the Earth's natural environment, an acquisition of a two-dimensional radar image of some earth surface area will not be sufficient in terms of obtaining required data. A more important thing would be to determine the surface scattering properties, i.e. to measure the backscatter coefficient. These procedures are in fact most essential when comparing the data from different remote sensing systems to those from observations made at different periods of time, in multifrequency or multipolarization radar sensing and monitoring of the dynamic sea surface and in many other instances.
Indeed, the behavior of elementary radar-signal scatterers on the sea surface differs noticeably from that of elementary scatters on land. As indicated in Chapter 1, the X-band radio wave scatterers on the sea surface are the "trains" (i.e. wave packets) of short-wave sea ripple. These trains move about randomly in different directions at relatively low speeds of the near-sea surface wind (which tends to generate them, for that matter). The manner in which they move is influenced by the orbital motions of the water in high waves (the directions of these motions at the leading and training slopes of high waves are known to be opposite [14]), by surface currents, subsurface sea formations (internal waves, etc.). Thus, in contrast to scattering by land formations (where the elementary scatters are, in the main, immobile or execute the motions of the same kind), one can see that sea surface-scattered signals contain the components of echo-signal phases whose variations differ in velocity and sign. As radar sea surface images are being synthesized, it appears to be extremely difficult to take due account of what particular fraction of echo-signal power was expended upon generating a regular component of these images and what other part of the power was expended to increase the intensity of a noise component - the so-called "speckle".
Currently we are well provided with specially developed mathematical procedures for SAR signal processing (the so-called autofocusing methods). These techniques are intended to restore regular components of synthesized images. Yet they are highly efficient in terms of imaging land and stationary objects.
It should be noted that for the SLRs the effects of moving elementary sea-surface scatterers do not seem to be hazardous, because the variations in the scattered-signal phase scatters are not allowed for. Therefore the SLRs can be regarded as measuring systems. And although they are not capable of implementing a high space resolution, they allow (if

92 the calibration procedure is adequately followed) the absolute values of radar coefficients of back-scattering from any Earth surface formations to be measured.
Scatterometers
A series of spaceborne remote sensing systems incorporate special-purpose multiantenna wide-surveying calibrated low-resolution radars. These radar facilities are intended to determine large-scale roughness components and, accordingly, the near-sea surface wind field parameters. The operational principle of these devices is schematically illustrated in Fig. 2.3.
Fig. 2.3. Sea surface coverage areas as viewed by the SAR and the dual-antenna scatterometer.
The scatterometer carries, at least, two antennas positioned at an angle of 45º (in
forward and backward position) with respect to the flight direction. At present three-antenna scatterometers are used, in which yet another antenna is installed. Each of the antennas radiates a continuous monochromatic microwave signal and receives a signal returned by the sea surface. The echo signal is no longer said to be a monochromatic one. Its spectrum gets broadened, because, as it is scattered by different sea surface areas, a Doppler shift of the signal is brought about. This shift is dictated by the velocity of each area of the surface and the space-based EOS. The space selection in these systems is performed by transmitting an echo signal through a set of band-pass filters. As will be clearly seen in Fig. 2.3, a signal at the output of each filter is extracted from a surface area bounded, on one side, by the antenna pattern projection and, on the other side, by the lines of the constant Doppler frequency, which correspond to the limits of this filter's band-pass.
Thus, the backscatter factor for each area of the sea surface is thought to be measured from, at least, two orthogonal directions. Ideally (specifically, in the case of a "single-mode" heavy sea state, i.e. when the sea surface is featured by a single big-waves

93system only), it allows one to determine the direction in which the high waves move along (with an uncertainty of 180º). The direction of the high sea wave motion, in its turn, is governed by the effect of the near-sea surface wind.
The scatterometers have a swath width of more than 500 km. Yet their low space resolution varies between 15 and 75 km. Unfortunately, in terms of that space resolution the sea roughness structures resulting from the widely distributed mesoscale atmospheric processes cannot be determined and appropriately taken into account, these processes being featured by typical scales varying between units and tens of kilometers. Therefore, on frequent occasions, particularly as regards the inland sea, tidal processes, littoral zones, etc., the scatterometer data may be dramatically different from the real situations.
Apart from the above-mentioned SARs, SLRs and scatterometers, the satellite-based radar altimeters are extensively utilized. They act as radar facilities whose antenna is pointing vertically downwards, and they are operated with extremely short sensing radio pulses. These systems permit the satellite flight altitude over the sea surface to be determined to a high degree of accuracy (true, this procedure is accomplished by averaging over relatively large areas).We will not discuss the above systems in more detail.
As evident from Table 2.1 in which listed are the data on the radar remote sensing systems that had been put to operational tests 1970 through 1991, it is easy to notice that the initial launch of the space-based "Cosmos-1500" SLR in 1983 was followed by a long series of launches (their number came up to 6 during that span of time) in which the same types of SLRs were involved. In contrast to the original generation of the SARs that had been designed and developed during that period of time, the satellite "Cosmos-1500" SLR was so efficient and virtually useful that the top-ranking leaders of the USSR took a crucial decision to embark upon the regular launches of satellites equipped with such radar facilities.
The SARs of the first generation had a number of major shortcomings that set significant limits upon the scope of their practical applications. Basically, these negative features were narrow swaths and extended periods of onground processing (synthesizing) of radar-acquired underlying surface images. Therefore particular attention was focused on the only practical use of those types of SARs as strategic reconnaissance tools. For example US-made high-resolution satellite Lacrosse-1,2 SARs were employed to provide for the strategic surveillance of ground objects across the territory of the USSR and other countries. In order to improve the performance of these systems the radar swaths were to be altered by varying the satellite inclined position. The rest of the first-generation SARs were used to serve as purely experimental facilities. They had opened up the new avenues of development of the advanced spaceborne SARs, which currently affords a great variety of viewing modes. The latter vary between the high-resolution (< 1 m) narrow-swath and the low-resolution (∼ 100 m) wide-swath (up to 500 km) surveillance of an Earth's underlying surface. In this case the position of the phased-array antenna patterns is electronically controlled. The type of control is frequently provided both in the elevation plane (with a goal of getting a swath promptly re-oriented) and in the azimuth plane (to implement the ultra-high-resolution viewing mode).
The above off-the-shelf spaceborne SAR is exemplified by the ENVISAT whose key parameters are listed in Table 2.2.
The spaceborne ENVISAT development effort was shared by nearly all European countries. The total cost of the entire space program was estimated at more than 2.5 billion US dollars. This spacecraft is equipped with 10 hardware instrumentation kits. The major onboard instruments carried by the ENVISAT system are as follows: an updated SAR (ASAR) version (MMS company); a MERIS spectrometer designed to record visible and IR regions in acquiring medium-resolution (250 m) images with the intent of studying oceanic effects, atmospheric processes and the Earth's surface; a MIPAS Michelson

94 interferometer (CASA company) to examine the tropospheric phenomena in the far-IR region; an updated, streamlined version of the radar altimeter (Alenia Spazio company); a GOMOS system for exploring the Earth's ozone layer in the UV, visible and near-IR regions; MWR, SСIAMACHY and AATSR radiometers and finally a DORIS self-contained trajectory-temporal measuring system.
The ENVISAT system in its implementation design can be regarded as an excellent kit of the off-the-shelf instruments meant to address a series of science issues. Throughout the first year of its on-orbit service several experiments had been carried out to explore: the sea surface in the central region of the Atlantic; the oil slicks in the Gibraltar Strait area; to monitor contamination in the oil-producing areas of the North Sea and to do mineral wealth prospecting in the northern regions of the Russian Federation.
As may be inferred from the analyzed performance parameters of the state-of-the-art spaceborne SARs and their operational experience over a certain period of time, these radars have not as yet come to be extensively used even by early 2004 as compared to the first-generation systems in terms of resolution, swath and other crucially important characteristics. Typically, these systems (except the LACROSSE-2,3,4 reconnaissance-oriented complex) have so far acted as experimental instruments. There are several reasons for this. One of them, which is found to be rather significant, is that the cost of the systems as such and the information they provide is too high. At the same time it is seen that the spaceborne SLRs were coming into their practical use (and to the best of their advantage) shortly after the satellite "Cosmos-1500" was experimentally tested in 1983. They offered the first tangible practical payoff: the radar data were sent to the vessels that had been nipped in the Arctic and Antarctic ice, helped promptly detect the hazardous atmospheric processes over the oceanic expanses, evaluate their parameters, etc. (we will discuss all these points in more detail in the following chapters). Thus, the results obtained from that SLRs operation were considered to be so spectacular and beneficial that the applications experts of the Navy Department, the State Committee of Meteorological Service and Ministry of Marine Fleet of the USSR found it extremely urgent to proceed with the regular manufacture of the SLR-carrying satellites and their on-orbit deployment as part of an integrated operational-type "Okean" system.
The unique productive features of the spaceborne "Cosmos-1500" SLR and the large-scale applications they had demonstrated (especially when the process of the practical adoption of spaceborne SARs takes quite a long time) require that these systems and their principles behind the methodology of their design and development be scrutinized.

95Parameters of ENVISAT spaceborne radar system
Table 2.2 Orbit parameters: average height, km inclination, degree orbital period, min. equator crossing time in the descending knot, h. min. track repetition period, day
820 98.55 101 10.00 35
SAR (ASAR): operating frequency, GHz antenna overall dimensions, m antenna weight, kg number of operating modes
5,331 1.3 х 10 720 5
Image and alternative polarization modes: space resolution (azimuth / elevation), m radiometric resolution, dB span, km swath, km digital data generation rate, Mbit/s power consumption, W … signal polarization (transmission / reception) in the modes of: standard survey polarization survey
30 / 29 2.5 … 3.5 100 … 56 (7 beam modes) 500 96.3 1200 (HH or VV); (HH and VV) or (HH and HV) or (VV and VH)
Wideband survey mode of ScanSAR: space resolution, m radiometric resolution, dB span, km digital data generation rate, Mbit/s power consumption, W … polarization of transmitted and received waves
150 х 150 2.5 405 (5 beam modes) 96.8 1200 HH или VV.
Global survey mode: space resolution, m radiometric resolution, dB span, km digital data generation rate, Mbit/с power consumption, W … polarization of transmitted and received waves SAR active operating time in one orbit, min
1000 х 1000 1.5 405 (5 beam modes) 0.9 750 (HH или VV). 30
Spaceborne remote sensing SLRs, their basic engineering principles and history of their development. Spaceborne SLR "Cosmos-1500"
The "Cosmos-1500" Side-Looking Real Aperture Radar installed aboard the EOS with envisioned missions of remote sensing of the Earth were conceived and engineered by a team of scientists and experts of the Institute for Radiophysics and Electronics of the Academy of Science of the UkrSSR (IRE AS UkrSSR, now the IRE NANU, Kharkov). The research and development work on the above radar facility was carried out under the supervision of Prof. A.I. Kalmykov in concert with the science-production personnel of the design office (DO) "Yuzhnoye" (Dnepropetrovsk, Ukraine), Special Engineering and Design Office of the IRE AS UkrSSR and Special Engineering and Design Office of Naval Hydrographic Institute of the Academy of Science of the UkrSSR (MGI AS UkrSSR now MGI NANU, Sevastopol, Ukraine).

96 The engineering concept of the spaceborne environmental observation subsystem
referred to as "Okean" was initiated and later matured at the above DO as far back as 1974 under the guidance of Dr. V.M. Kovtunenko, chief designer of DO-3. Originally they contemplated developing an orbital EOS network equipped with a diversity of optical, IR, radar and microwave radiometric remote sensing systems. Their operational goal was to deliver necessary data on the sea surface state, the near-sea surface wind and to provide ice patrolling function in the polar seas, etc. This information was to be dispatched to different state-run administrative bodies and agencies, specifically, the State Committee for Hydrometeorology (Goskomgidromet), the Navy Department, the Arctic Shipping Route administration of the Ministry of Marine Fleet (Glavsevmorput), the Ministry of Fishing Industry and other users of the USSR.
Just by that time Dr. V.M. Kovtunenko had been aware that a group of Ukrainian researcher (IRE AS UkrSSR) had gleaned a unique formidable amount of scientific data on the rough sea surface. This material allowed them to proceed to practical work on designing special facilities for sea surface radar monitoring from ships and helicopters. In fact, the theoretical and experimental studies that had by then been made by Kharkov radiophisicist enabled one to gain a deeper insight into the nature of microwave scattering by a rough sea surface and opened up new areas of practical applications of remotely sensed data. The investigations and model experiments had been carried out for many years in the village of Katsiveli ( MGI AS UkrSSR) in a storm-producing pond and from ashore on the sea surface using the multifrequency radar complex (at 8-mm, 3-cm, 10 cm and 50-cm wave bands). Concurrent with off-shore operations the exploratory work was being done by a MI-8 helicopter using an X-band SLAR. That provided yet another convincing evidence that diverse issues ranging from the near-sea surface parameter measurements to detecting oil slicks on the sea surface might as well be tackled by radar techniques
The remote sensing operations and the results they yielded were highly appreciated by the worldwide remote sensing community, mainly because they opened up excellent avenues for spaceborne remote sensing radar technology oriented towards sea surface monitoring. In this context an interesting event is worthy of notice. In 1969 a Diploma was conferred by the world-famous IEEE (USA) upon the Ukrainian remote sensing experts. A "two-scale" model devised by the IRE AS UkrSSR has so far been in use throughout the world when it comes to developing the sea state radar detection facilities and interpreting the relevant data.
We should give our due to the "Yuzhnoye" DO that turned out to be rather quick to grasp the ground-breaking, advanced results obtained by Prof. A.I. Kalmykov's team. It was a really good thing that everyone involved in this activity had managed to urge the high-ranking leaders of the USSR and even the Communist Party Leader L.I. Brezhnev to give the go-ahead for the development of high-performance spaceborne radars that could be utilized in monitoring the World Ocean for the benefit of the Navy and the national economy.
Of the research organizations that had made a decisive start to engineer the pioneer experimental system incorporating a scatterometer was the MGI AS UkrSSR closely associated with the IRE AS UkrSSR. That scatterometer-carrying facility was designed to be installed aboard the spacecraft "Cosmos-1151". The development and installation operations were carried out at the DO-3 committed to the "Yuzhnoye" main headquarters activity. And in the long run, this system was placed into orbit in late 70-s. Yet, regrettably, the initial space information that was coming in had proved to be unsuitable for practical use.
A sudden reversal of the normal situation took place and there was a bit of compelling reason for this. It soon became known to most of the space community members that the USA were on the verge of completing their development work and

97getting ready for launching the "SEASAT" EOS SAR to sense the World Ocean expanses. As soon as the first-hand data had been retrieved from the above system, the Soviet Party and governmental leaders took a sweeping decision to speed up the space effort in their pursuit of creating an in-house remote sensing satellite that could be used to sense the world Ocean surfaces. To this end, special-purpose resources had been promptly allocated. 1979 was really an eventful landmark, because the IRE AS UkrSSR was committed an important task to proceed with developing spaceborne remote sensing systems under the auspices of the then Ministry of General Engineering (USSR), and within a short span of time a department for "Remote Sensing of the Natural Environment" was established and Prof. A.I. Kalmykov was placed in charge of this significant entity.
It should be noted that at those stages of human relations this resolute, outright step got a chilly reception. There was a lot of misunderstanding and resistance on the part of the then IRE AS UkrSSR executives in the Soviet Ukraine. Their firm belief was that the scientists of the academic institution ought to do fundamental researches only and stay away from space-oriented engineering effort. S.S. Kavelin, deputy chief designer of the DO-3, who was directly involved in those developments, is quoted as saying: «Nevertheless, Prof. A.I. Kalmykov's inspirational views on and approaches to space issues were met by the IRE AS UkrSSR executives (Acad. V.P. Shestopalov) with a bit of caution, if not a somewhat apprehensive response, although the innovative space technology held a good deal of promise in terms of exploring the natural environment". The thing was that all those operations seemed to be well underway to reach the level of getting government orders and at the same time the lack of expertise and adequate production facilities could hardly keep its reputation free from all slurs. At any rate, the Institute could go on with its "traditional" academic activity without being plagued by objectionable "headache" problems. As a consequence, a course of actions that had been earlier mapped out might have ended in a flop.
It was just at that crucial moment that Dr. V.M. Kovtunenko, in his full-dress uniform, wearing the orders of the Hero of Socialist Labor, the Laureate of the Lenin Prize, makes up his mind to leave Dnepropetrovsk for Kharkov in the car of his own. That was in March 1977. As we were driving onward, the car's heating system developed a failure and we had to jog along on the ice-glazed road and shivered with perishing cold for more than 4 hours. It looked as if he were tremendously affected by that sort of drive, because the way he talked to Acad. V.P. Shestopalov sounded so exciting and impressive that Viktor Petrovich conceded in our arguments and his ultimate decision was to promote and encourage the Kalmykov's team and its pioneer space effort in every way possible. More recently, being the member of the State Commission on "Okean-01" launch operations, Viktor Petrovich would time and again remind me of that encounter and pointed out that "the decision he had then taken was a correct one"».
In early 1980s a fresh start was made by Prof. A.I. Kalmykov's team to design and develop a spaceborne integrated radar package incorporating a X-band SLR and Ka-band scanning radiometer. At the same time an airborne remote sensing complex known as "Analog" had already gone through the engineering development phase. It also comprised a SLAR facility and a scanning microwave radiometer. The development work on the airborne complex dedicated to optimizing the techniques for collecting and handling the remotely sensed data on the sea surface and ice sheets alone was being carried out ahead of schedule and in mid 1982 it started flying missions. The very first experimental flights had already demonstrated the efficiency of the ocean and glacier exploration operations proposed by the IRE of the AS of the UkrSSR. The next thing the space researchers and practical engineers settled down to was to upgrade and streamline the procedures of processing the remotely sensed data similar to those that were expected to come in from the spaceborne radar equipment (SRE).

98
•
•
•
•
For more details we will address some specific "Analog" features later on. In the following discussion the only point we would like to make is that the joint efforts that had been undertaken to create the spaceborne remote sensing system and its airborne counterpart enabled one not only to be fully prepared for on-line processing and interpreting space data in good time, but also allow no stoppage or suspension of the development work.
Now let as look at the principles that had been worked out by Prof. A.I. Kalmykov and his coworkers to provide the solid basis for creating the specific SRE, opting for required parameters of the entire system and validating them.
The major customers who had placed an order for the development of the SRE were the specialized organizations such as Goskomgidromet and the Hydrographic Administration of the NAVY (USSR). Their primary goal was to perform real-time mode monitoring of the near-surface wind fields over the World Ocean and ice patrolling operations in polar seas. It was anticipated that this radar facility would be used as an integral part of the permanently orbiting satellite group. Therefore the spaceborne hardware did not have to be expensive. To address this category of issues believed to be quite challenging a decision was first made to get down to combined synchronous sensing of underlying surface using a SLR and microwave radiometer (RM) and optical multichannel scanner (MSU-M – this device has long since been designed and extensively used at that time) systems. Their parameters such as swath width and space resolution were expected to equal no less than 450 km and vary between 1 and 2 km respectively. They allowed one to monitor the basic interaction effects in the ocean-atmosphere system (using the optical instruments and the SLR facility both at the cloud cover and the sea surface levels respectively) as well as the key processes of ice formation and dynamics of ice sheets. The high operational capability of the system resulted from the SLR and the RM facility being intrinsically independent of the illumination conditions, the time of day, etc. and from the onboard real-time information processing and data transmission via the international APT standard channel to a very broad network of receiving stations (by then there had been more than 500 stations of that kind operating in the territory of the USSR). The SLRs measuring characteristics (i.e. their ability to determine the quantitative signatures of underlying surface scattering, specifically, the radar cross section (RCS or σ0) were provided through the internal continuous calibration of the SLR potential.
It should be emphasized that such a SLR engineering philosophy was fundamentally different from the radar remote sensing concepts (which had at those days prevailed amongst the leading remote sensing Soviet experts) on what particular type of radar should actually look like. Most of the top researchers and engineers concerned with the activity of highly renowned science-oriented organizations like the IRE Academy of Science of the USSR, the state-run Research Center for Investigations of Natural Resources under Goskomgidromet, the Arctic-Antarctic Research Institute (AANII, Leningrad) and others were enormously impressed at the results gleaned by the SEASAT SAR. They strongly believed that close attention was to be focused upon developing a system that might be very much the same as that of the SAR complex. They seemed to have a bent for a sophisticated and high-priced SAR featuring a fairly narrow swath (the viewing zone of 100 km and less, incapable of being operational and measuring the RCS absolute values, with lengthy periods of onground data processing etc.

99By the way, this system was developed by the research and production association
RPA "Vega" (Moscow) and installed on the satellite-based "Cosmos – 1870" that was put into orbit in 1987. It should be recalled that due to some challenges caused by SAR data processing involving the use of the existing facilities the first images acquired by this SAR were synthesized only within a few months of their transfer to the Earth.
Going back to the preceding reasoning we would like to touch upon several events of great moment. As the work on the SRE development was in progress and drawing to a conclusive phase, one could not help but feel that some of the highly placed executives had failed to perceive the advantages of the SLR design philosophy suggested by Prof. A.I. Kalmykov. An ever-increasing resistance was offered by the top experts of the afore-mentioned institutions (in particular, by the leading Research Institute of the Ministry of Mechanical Engineering). All those "high-ups" insisted that the development effort be terminated or, at least, suspended. A huge number of records, special reports and documents came cropping up. They had been signed by renowned researchers of Moscow and Leningrad (now Saint-Petersburg). They all claimed that the spaceborne system under development would be of no use, technically unsound and kept coming out with all kinds of ungrounded arguments.
What really surprises us is that these records were not lost up till now, although there is a bit of suspicion that somebody genuinely wished that this evidence of outright prejudice and academic blindness had disappeared for good and all.
Shortly before the engineering work on the SLR satellite availability was finalized and it was due for launch, things seemed to be getting critically worse: the whole project was on the verge of being discontinued. In the "Yuzhnoye" Design-Office Headquarters a representative meeting was soon convened, at which all the views and arguments for and against were carefully heard out once again. The most essential argument in favor of the A.I. Kalmykov's team were the remotely sensed data on the sea surface and sea ice conditions, which had by then been collected by the "Analog" airborne system. These data sounded quite convincing and so reassuring that encouraged B.Ye. Khmyrov, DO-3 Chief designer, and the "Yuzhnoye" DO management to demand that the Kharkov group of researchers and practical experts go ahead with the development effort and never suspend it in any way. Additionally, of great importance were the results from in-house, independent monitoring by the would-be users of remotely sensed data. This monitoring was performed by the "Yuzhnoye" DO experts in the North and Fast East regions of the USSR. They indicated that the real users such as hydrometeocenters of the Naval Forces, winterers and piloting headquarters were longing to become aware of the real-time radar data on the near-sea surface wind, sea state, ice conditions or other environmental parameters. Most of the users could avail themselves of the receiving station of the APT standard and made use of them to pick up the NOAA EOS's data. Numerous users were poised for immediate reception of spaceborne data downlinked via that channel. Any hold-up in these operations was out of question. The whole affair brooked no delay. And that long-awaited day came.
On September 28, 1983 an EOS-based "Cosmos-1500" system with an onboard suite of radar facilities was successfully fired into space. The scheduled proof-of-principle operational tests of its orbital hardware components got underway. It soon turned out that the scanning microwave radiometer had developed a failure whereas the SLR started running without a hitch. In fact the initial results obtained from the "Cosmos-1500" SLR were found to live up to the boldest expectations of its developers. The SLR was at its best. The data it kept on delivering were immediately received not only in Moscow but in the remotest Northern regions, by the navy vessels, in Kharkov, Sevastopol and many other places. These data were a fertile field for research and practical applications. They all could well be explored by different expert groups. Here is a fact that is worthy of notice, for that matter. Within a month after the "Cosmos-1500" SLR had been placed into orbit, the data

100 transmitted from that spaceborne radar were effectively used in rescue operations when a fleet of 22 cargo ships got stuck in heavy ice in the Longo Strait (somewhere in the Arctic region). This remarkable event had left the most hard-nosed skeptics enormously impressed. All their doubts as to the usefulness and efficiency of this facility were dispelled. Then came a clear awareness that all the concepts behind and engineering approaches to the development and design efforts were found to be valid and fully justified.
The above operation which we think is really unique will be discussed in more detail in subsequent chapters, to say nothing of other, no less exciting examples of the SLRs performance and its orbital "fellowmen" called upon to take its place. Once again we would like to stress the point that the conceptual approach to creating a low-cost Earth observation satellite to be used for real-time monitoring of the Earth natural environment in combination with wide-swath, medium-resolution systems (involving a SLR and an optical scanner in the initial stage) and onboard-processed data transfer to a variety of users is an excellent pay off. The facility in question got off to a good start and everybody felt that no remote sensing community could do without it. Just take a look at Table 2.1 and you are bound to see how many standard space-based SLRs had been placed into orbit in the USSR. 1995 was a new historic landmark for Ukraine as an independent state whose territory was used as a landing pad for developing the space-based "SICH-1" facility and in 2004 an updated version of the spaceborne "SICH-1M" SLR was inserted into orbit.
The following Chapter will be devoted to the analysis of the data handling potential of the above SLRs and their operational performance as compared to the present-day radar systems intended for remote sensing of the Earth from space.
receiving antenna of the data collecting and processing scalled "K
ystem ondor-2"
SLR power supply and control unit
SLR's transmitter unit UHF-band transmitting antenna of
information transmission radioline
multizonal scanning small- resolution device MSU-M
multizonal scanning medium-resolution device MSU-C
VHF-band transmitting antenna of data transfer radioline
antenna of scanning microwave radiometer RM-08
SLR antenna
transmitting antenna of the data collecting and processing system called "Kondor-2"
a

101
b
Fig. 2.4. Schematic sketch of the EOS-based "Cosmos-1500" SLR carrying a suite of
necessary instruments (a). A photo of the above satellite in the "Cosmos" pavilion at the Exhibition of National Economic Achievements of the USSR (b)

102
Fig. 2.5. The main participants who designed and developed the SRE for the EOS "Cosmos-1500"- assistants of the Department of the remote techniques for natural environment of the Institute for Radiophysics and Electronics (Kharkov). Prof. A.I. Kalmykov (who was in charge of the development work) is in the centre of the 2-nd row. Fig. 2.6. The antenna system of the SLR for the EOS "Cosmos-1500" during the proof tests.
The 2-nd on the left is P.M. Torchun, design engineer; the 3-d on the left - Acad. V.P. Shestopalov, director of the Institute for Radiophysics and Electronics (Kharkov); in the center - Prof. A.I. Kalmykov, the 2-nd on the right – V.V. Igolkin, supervisor of the antenna system development.

103
Fig. 2.7. V.P. Blagun, I.А. Vdovichenkо, V.F. Utkin ("Yuzhnoye" DO), Acad. B.А. Nelepo (MGI AS UkrSSR), Prof. A.I. Kalmykov in the village of Katsively during the "historic" meeting that had predetermined the line of the long-term program for developing spaceborne radar on-line remote sensing systems.
Fig. 2.8. The participants that had been engaged in designing and developing the EOS "Cosmos-1500" They were photographed during the celebration of the 25-th anniversary of the "Yuzhnoye" DO foundation. S.S. Kavelin (the 2-nd on the left in the 1-st row), B.Ye. Khmyrov (the 4-th on the right in the 1-st row), V.I. Dranovsky (the 3-rd on the right in the 2-nd row), I.M Poluksov (the 2-nd on the right in 2-nd row), I.M. Balaklitsky (the 1-st on the left in the 2-nd row), in the 3-rd row (from left to right): I.A. Vdovichenko, G.A. Astashevsky, A.I. Kalmykov, Yu.V. Terekhin, V.S. Gladilin.

104 §2.1 The basic operating features of the EOS “Cosmos -1500” SLR
The selection of the major performance characteristics of the EOS “Cosmos-1500” SLR was based upon a fundamental need to resolve the issues of on-line sensing of the Earth’s environment in the most efficient way. In this context the scattering characteristics of different underlying surface (primarily, the sea surface and brine ice) and the distinctive features of remotely sensed data interpretation methods (which were likewise based on the experimental results and well-tried scattering models) were taken into account.
To provide an effective means for the radar observations of different inhomogeneities in the surface sea roughness field, which were caused by the near–sea surface wind fluctuations and the existing surface-active substances and other active agents, it was necessary to decide on some optimal operating SLR wavelength [135]. Special attention was also focused on the following facts. The ripples are said to be the main MW radio wave scatterers by ocean surface. The sensitivity of ripples to the factors affecting the sea surface spectral density (such as wind, currents, oil films, etc.) tends to grow with a decrease in its lengthΛ . As a consequence, the contrasts K of radar-imaged inhomogeneities on the oceanic surface were likewise enhanced. Besides, it is possible to interpret the related effects. All this is expressed as:
5.2~ −ΛK The different gradations of ice can be identified depending upon the distinction
between its scattering properties. This kind of variations is governed by the SLR wave- length λ. The examination of the results cited in [69] indicates that the maximum difference in radar returns from the first-year and multi-year ice is in fact observable between 9 and 10 GHz and up.
Here it should be noted that the border between young and multi-year ice is one of the essential factors to be allowed for in ice reconnaissance. Thus, the most efficient observations of the sea surface can be best made using the X-band and shorter wave. However, it appears to a rather challenging job to make use of the Ka-band wave for the space-borne operations, the reason being the noticeable absorption of radio waves in the terrestrial atmosphere [1].
The operation of the “Cosmos-1500” SLR was based mainly on the X-band wavelength, which with single-frequency spaceborne radar systems makes for the most reliable observation and highlights the diverse age gradations of brine ice with no appreciable losses in the atmosphere.
The range of optimal angles of the SLR-irradiated Earth surface was determined, because this was a pressing need to provide for the scattered-signal levels over a large swath width. These signal levels would suffice to observe the aroused sea surface and various types of brine ice and to ensure their maximum sensitivity to near–surface wind variations, oil slicks on the sea surface, differences in age of ice and its condition, etc. [136].
Fig.2.9 presents an example of an averaged curve for the experimental contrasts K of radar–imaged different-in–origin oil slicks on the aroused sea surface as a function of the angle of incidence θ [35,135]. As will be apparent from the analyzed dependence, or the curve, we arrive at an unequivocal inference that it is difficult to observe inhomogeneities at for two reasons. On the one hand, the contrast of their relatively rough sea surface is rather low. On the other hand, in the above-mentioned range of incidence angles the sign of observed contrasts is likely to vary [26]. At
020<θ
°> 50θ (i.e. at

105 grazing angles and far greater slant range) this observation seems to be more difficult to make in terms of using power.
Fig.2.9. An average curve for experimental contrasts K of radar images of different-in-origin oil slicks on the aroused sea surface as a function of the incidence angle θ [35,135]
The age gradations of the sea ice can also be discriminated depending upon the
chosen irradiation angles. As indicated in [69] at , a decrease in the contrasts of returns from the thick first- and multi-year ice is noted, although it does not appear to be so dramatic as for sea surface inhomogeneities. It is exactly for this reason that the surface irradiation angles ranging between and 500 were opted in the single-frequency space radar sensing of the ocean surface and ice sheets.
020<θ
020=θ
Below are listed the EOS “Cosmos -1500” SLR characteristics:
Swath width ……………………………………………… ……………475 km Potential resolution including (-3db) signal level storage of -3db of the antenna pattern
along-the-flight track in a swath width………….. ………2.1 2.5 km ÷across-the-flight track in a swath width……….... ………0.9 0.6 km ÷
Wavelength………………………………………………. ……………~ 3.1cm Radiation pulse duration…………………………………. ……………. 3 secµ Peak radiation power…………………………………….. ……………100 kW Pulse repetition frequency (PRF) ………………………... ……………100 Hz Radiation and reception polarization……………………... ……………….VV Receiver threshold………………………………………... ………….-140dB/W Number of integration pulses………………….…………. ……………..…….8 Number of radar image lines at the output of the processing system………………………………………..
…………..4 per sec
Beam width ( for a level of -3dB) in an azimuthally (H) plane………………….. ……………….. °42in an elevation (E) plane……………………... ……………….. °2.0
Antenna gain……………………………………………... ……….....….35 dB Antenna deflection angle from nadir……………………... ……….………. °35Power consumption ……………………………………… …………….440 W

106 The vertical radiation and reception polarization was opted so as to obtain a
maximum of return signals from the sea surface [60]. The levels of signals echoed from the ice sheets were essentially polarization–independent. The radar-based ice and sea surface observation over a large swath width was made feasible due to a high operation potential. In general, SLR potential was achieved owing to a highly sensitive receiver and great pulse radiation power at a high antenna gain. In the general case, the SLR potential allowed one to observe the surface at the edge of the swath, the and noise/signal ratio being equal to -20dB and 1 respectively.
0σ
The block diagram of the “Cosmos -1500” SLR facility equipped with a data transfer line is shown in Fig. 2.10. The radar comprises an antenna, a receiver, a transmitter, a power supply, control and telemetric (TM) monitoring systems. The SLR output signal is converted into a line-frame structure in a signal processing unit (SPU) and fed into the VHF- or L-band line of a radio-television communication complex. In the former instance the retrieved data were downloaded to a wide network of self-contained reception points in the APT format, in the latter instance the data were downloaded to regional data-receiving centers in a special format.
Fig.2.10. Block diagram of the “Cosmos-1500” SLR with a data transfer line
The SLR spatial resolution was selected in terms of matching the transmission properties of transfer lines with an output flow of the signals, constraints on antenna dimensions and obtaining a maximum swath width. The SLR-produced signal integration leads to an efficient decrease in the variance of its fluctuations. As a result, radiometric resolution of the system increased and the structure of radar images could thus be easily discriminated. SLR antenna
A horn-radiator slotted-guide antenna has been developed for the EOS “Cosmos-1500” SLR facility. The antenna is constructed in a 23×10 mm copper waveguide. The slots are arranged on a wide wall at a varying distance from its axis. The changeable distance makes for an amplitude field distribution along the antenna aperture “cosine-on pedestal". This distribution was selected so as to specify and meet the stringent requirements for the side-lobe level of directional pattern which is equal to -23 ÷ -25 dB.

107 The antenna effective length is 11085mm with a 44-mm horn aperture, the number
of slots is 480. Note that procedures for configuring the slotted waveguide antennas of large electrical size had not been around at the time. In this context a special-purpose program had been devised to design the slotted waveguide antennas of that particular size. This program was previously optimized on smaller-size antenna prototypes. Basically, this particular antenna was found to be world’s first-ever system by the time it had been under development.
It was quite a challenge to measure both the real pattern of the antenna unfolded into two planes and its gain when on ground. To meet it, a helicopter carrying a MW–radiator was used and at the same time a 11- meter long antenna with a receiver and a recorder was held fixed in an upright position, hanging out on a mast of appropriate dimensions.
The antenna construction was light in weight and of relatively small size in a folded position when it was placed in orbit. Besides, its operating parameters remained to be highly efficient when the whole facility was operated under severe temperature conditions in the outer space. Physically, the antenna was made as an assembly consisting of a load-carrying base, an antenna proper and its energizing feeder. The antenna and the base were divided into 5 sections joined together by the unfolding mechanisms that came into action at the instant the antenna was brought into an operating state following the EOS orbital injection (see Fig. 2.11).
The antenna sections were butted together and clamped by means of the spring–loaded catches fastened on their ends. These clamping devices were actuated by release mechanisms just when the antenna unfolding cycle was to be completed. To provide for the electrical insulation of antenna section joints at the waveguide flange ends of each section (along the wide wall), special cylindrical springs were installed. As a result, a relative level of power leakage at the joints of the sections was no more than -50dB.
Substantial time variations and temperature dropped along the antenna length could result in deforming the plane surface of its aperture and, hence, to distorting its pattern. This effect was obviated by fixing the spatial position of the antenna with a specially designed load-carrying base. After the clamps were opened the antenna was cleared from the clamps and held free on loop devices located at its ends. Then the antenna was tightened (like a bow string) by a special spring-loaded mechanism positioned in the center of its base, its pull being ~ 20kg.
The antenna was connected to the transceiver via a waveguide feeder with flexible inserts. The feeder was split into three parts. As the antenna assembly was being unfolded, the feeder sections were joined by means of non-contact choke flanges. After the assembly was unfolded, it turned through an angle of 350 from the nadir.
Fig.2.11. Construction of the base and the SLR antenna unfolding system

108 Fig. 2.12 presents the results from on–ground measurements of the EOS
“Cosmos–1500” SLR antenna patterns in elevation (E) and azimuthal (H) planes.
Fig. 2.12. The results from on-ground measurements of the EOS “Cosmos–1500” SLR antenna patterns in elevation (E) and azimuthal (H) planes
Transceiver The SLR receiver was built around the super-heterodyne one-fold frequency-
changing circuit. The receiver exhibited a high sensitivity because a microwave parametric amplifier was installed at its output. Its noise temperature and an amplification factor were equal to 150-2000 K and 15 dB respectively (a transistor amplifier with similar parameters was utilized in commercial specimens). The SLR receiver block diagram is shown in Fig.2.13. The receiver had a balanced mixer, its diodes being connected in parallel for a high frequency mode and shunt for DC operations. The IF amplifier had 3 fixed amplification factors. These factors were selected in response to one-time commands and governed by the level of the returned signal that was dependent upon a particular type of the surface to be explored. The SLR receiver dynamic range was no less than 30 dB.
Fig. 2.13. The SLR receiver block diagram

109 A heterodyne is a solid-state, electronically changed frequency device. The
receiver operating at a relatively narrow frequency band of ~ 700KHz, with possible frequency drifts, was tuned by means of the automatic frequency control of heterodyne (AFCH), thereby keeping the difference between the transmitter and heterodyne frequencies within MHzfFIF 1.030 ±=∆± . The AFCH lock-in band was
, and in this particular system it was restricted by the pass band of the AFCH IF channel. The hold-in band was no less than
MHz30±MHz50± .
In the EOS SLR of “Cosmos -1500” type transmitter use was made of the MI-189 magnetron (in mass–produced specimens it was replaced by an up-to-date, more powerful, cold-cathode device). The modulator was built around a conventional circuit incorporating a thyratron key along with a step-up high-voltage pulse transformer. The modulator had a power supply and elevated temperature protection.
Ancillary system This system consisted of the following elements:
1. A remote control device comprising transmitters and amplifiers of commands provided for the SLR turn-on sequence and switch-over of its operating modes.
2. Sensors for telemetric monitoring of commands passage and the state of SLR individual assemblies and units.
3. The circuits of onboard power supply protection against the overload and overheating of separate units and assemblies.
4. Power supply systems. The SLR facility was powered from a 28V onboard DC voltage source. This voltage was transformed by a static converter to an alternating 3-phase current at 1000Hz and a voltage of 40 V. The voltages needed to keep the SLR operation energized were generated using a three phase transformers, rectifiers and stabilizers. SLR construction Physically the SLR is made up of five blocks. Three of them (a transmitter with a
microwave receiver section, a static converter, a control and power supply system) were enclosed in hermetically sealed containers. These blocks were arranged in the outer space on the external EOS panels. A LF receiver block and a signal processing unit were placed within a hermetically sealed EOS structure. The SLR service performance has proved to be quite reliable, because all assembles of the system had previously been given a careful try-out. As a result, the guaranteed usage time of the entire facility (six months) has extended by more than 4-fold.

110 §2.2 Airborne radar complexes for remote sensing of the Earth
Nowadays in most of the highly industrialized countries a good deal of attention is
being given to designing and developing airborne remote sensing radar facilities. These systems are intended to tackle a broad range of research-oriented and applied issues. Clearly the primary goal of the remote sensing systems is to prevent and track the developing natural and anthropogenic catastrophes, to carry out ecological monitoring, to do prospecting for mineral deposits and protect natural resources, to name but a few other operations. In this context it should be noted that along with conventional air-survey cameras (monochromatic and color) an extensive use is made of IR scanners side-looking, real and synthetic aperture radars. At the same time, a special emphasis is now placed on developing multifrequency, multipolarization radar facilities.
We can provide a large number of examples of airborne multifrequency remote sensing systems noted worldwide for their high efficiency in terms of dealing with the afore–mentioned problems and operating under all-weather (especially when the sky is cloudy) and underillumination conditions. These are: NAWC-AD/ERIM Quad-Band FUL-POL P3 SAR (USA), AIRSAR (USA), C/X SAR (Canada), E-SAR (Germany), MARS (Ukraine), IMARS (Russia), etc. It should be pointed out that these systems are chiefly dedicated to experimental purposes. They are placed aboard the airplanes that are found to be rather expensive facilities and it is exactly the main reason why their use is limited. The sole exception is the “MARS” complex installed aboard an IL-180 aircraft. This system has been widely utilized for many years as an efficient tool for ice reconnaissance missions and pilotage of vessels in the Arctic basin, mineral prospecting, searching for supposedly rich fishing areas as well as for environmental monitoring, etc.
As the practical experience has shown, the airborne remote sensing systems offers the highest efficiency if its operational characteristics meet the following requirements. Firstly, the set of onboard integrated facilities and their parameters should be adequately matched to the techniques for tackling specific issues. Secondly, the performance characteristics of onboard facilities should be soundly interrelated. All this leads us to conclude that the above systems based solely upon engineering concepts is found to be less informative. Specifically, if one of the facilities parameters is unjustifiably improved (for example, space resolution is increased to the detriment of contrast-background sensitivity or when a redundant number of frequency channels is used, etc.), then the informativeness of the whole system can be enhanced with no regard for radio wave scattering signatures in phenomena and formations under study. Besides, physical methods of detecting and specifying the parameters of these formations have to be taken into account as well. Airborne Radar Complex “Analog”
The evolution of aerospace remote sensing radar systems in Ukraine dates back to the mid 70s when the techniques for remote sensing of the sea surface from air- and spaceborne carriers were originally tested and optimized at the Usikov Institute for Radiophysics and Electronics of the NASU (Kharkov). The trial operations were performed using the wave-producing pool in the Experimental Division of the Marine Geophysical Institute of the AS of Ukraine. This work was done in the seaside village of Katsiveli, Feodosia, Crimea). A multifrequency measuring radar complex (operating at 8-mm, 3-cm, 10-cm, 50-cm wavelengths) and a data processing point was located in the Katsiveli coastal zone [23]. As the test operations were well under way, the sea surface was being simultaneously surveyed by a SLAR ( cm3≈λ ) installed aboard a MI-8 helicopter. The results all those operations produced were a clear indication that radar remote sensing techniques offered a high potential in terms of measuring the sea roughness parameters and detecting the inhomogeneities on the sea surface.

111
In the early 80s a novel remote sensing technology was suggested to study ice and oceans from aerospace carriers. It envisaged using the SLAR ( cm3≈λ ) and a scanning radiometer (RM) ( mm8≈λ ) along with on–line data processing. The airborne version of the above complex was set up aboard an IL-18 aircraft (its airborne counterpart is “Analog” [137]). The block diagram of the complex is shown in Fig. 2.14. The key parameters of the “Analog” facility are listed in Table 2.3.
Fig.2.14. The block diagram of the airborne complex “Analog”
Table 2.3 The basic parameters of the complex “Analog” Parameter SLAR Radiometer
Wavelength Polarization Sensitivity Sector of observation angles Resolution: - Θ=40°, Н=7km - Θ=40°, Н=1km
3 сm vertical
-130 dB/Wt 5°÷70°
45 х 70 (2m pτ =0.2 sµ )
8 mm horizontal
1.5°К(τ=40ms), 0.3°К(τ=1s) 20°÷60°
350 х 350 2m50 х 50 2m
The SLAR operational characteristics were selected so as to make it possible to
survey a large variety of inhomogeneities on the oceanic surface and discriminate the ice cover age gradation using the radars over a wide swath and with a maximum contrast range [69,135]. The basic SLAR characteristics are listed in Table 2.4.
The scanning radiometer of the "Analog" complex is intended for producing radio thermal images of the Earth surface over Ka-band wavelengths [136]. The sector of surface observation angles is fitted to that of the SLAR radiation angles so that the radiometric images might overlap. The basic radiometer characteristics are listed in Table 2.5 [136].
The operation of the entire complex proceeds as follows. The sensing microwave radio pulse generated by the SLAR transmitter is illuminated by an antenna in the direction of the Earth surface. Part of the microwave energy backscattered by each of the elements of the surface irradiated in the SLAR antenna beam direction is taken up by this surface, sequentially with time, gets amplified in a receiving device and converted to a video signal. The amplitude of the signal carries some information on the scattering properties of corresponding surface elements whereas the time delay with respect to a sensing pulse is determined by the distance to those surface elements. The video signal is then fed to the

112 input of radar signal processing unit (RSPU). The video signal proportional to the radiothermal radiation intensity is fed to the radiometer signal processing unit (RM SPU) from the microwave-radiometer output. The delivery of the sequential-in-time signal is provided by the radiometer scanning antenna, the microwave energy being scattered by the corresponding elements of the surface being explored.
Table 2.4. Parameters Values
Operating wavelength Radiated pulse length Duty cycle Pulse radiation power Radiation polarization Threshold sensitivity of the receiver Antenna beamwidth for a level -3dB:
-in azimuthal plane -in elevation plane
Antenna gain Swath width Resolution in a surveying mode: -across-track flight in a swath width -along-track flight in a swath width Resolution in a trace record mode: - across-track flight at incidence angles ranging between 50 and 700
- along-track flight at incidence angles ranging between 5 0 and 700
3сm 0.05 sµ ÷ 2 sµ
2000 100 kW vertical
-130dB/W
0.6° 42°
30 dB 10 km*
85m ÷ 35m
60m ÷ 110m*
85m ÷ 8m
7.7m ÷ 25m** Note: * the above characteristics are given for flight altitude Н=7000m
** the above characteristics are given for flight altitude Н=1000m Table 2.5.
Parameters Values Operating frequency range Antenna beam width for a level – 3 дБ (Е х Н) Sidelobe level Scanning period Sensitivity Integration time constant, τ Interval of temperatures to be measured
36.5 GHz ÷ 37 GHz 2.2° х 2.2°
-22 dB 1 s; 2s
1.5° К (τ = 0.04 s) 0.3° К(τ = 1 s)
0.02 s; 0.04 s; 0.1 s; 1 s; 10 s 78° К ÷ 350° К
As the time taken to collect information of one radar and radiometer image line
varies substantially, the processed SLAR and RM signals undergo temporal conversion and time convergence in a single video image line. Besides, the above devices (radar and radiometer processing units) are used to accumulate radar signals, to correct their amplitudes and to compensate the spatial distortions of the SLAR and RM information lines. These distortions are related to the non-linear Earth surface range dependences and the position of the RM antenna beam. The data coming in from the above radar facilities are processed directly aboard an aircraft on a real time basis and are later transformed to a line-frame structure. These data are displayed on a half-tone screen for the operative analysis and recorded using a fax machine and a magnetograph.

113
The “Analog” airborne complex was used to give a try-out of the techniques for synchronous radar-radiometric remote measurements. The data extracted from this system contributed towards refining the engineering constituents and performance characteristics of spaceborne radar equipment of the EOS “Cosmos-1500”. On-line data handling procedures were also evaluated. The in-situ measurements of scattering and radiating properties of ice sheets and the oceanic surface were taken in the areas of the Black, Kara, Okhotsk, Japan Seas and the Pacific Ocean, and they helped to gather a huge amount of useful experimental information and achieve quite new results [138,139]. More recently the “Analog” complex was renovated and streamlined by incorporating Ka-band SLAR and L-band SAR facilities. These systems have become an integral part of the multipurpose radar complex known as “MARS”. Fig. 2.15 presents a general view of the IL-18 aircraft with the up-to-data complex “Analog-1” and an external view of onboard antenna systems.
а
b
Fig.2.15. A photo of the IL-18 aircraft carrying the “Analog-1” complex (a), an external view of the antenna systems (b): 1 - X-band SLAR antenna, 2 – Ka-band SLAR antenna, 3 – L-band SAR antenna, 4 - antenna system of a Ka-band scanning radiometer

114 Multipurpose multifrequency radar complex “MARS”
The operational evidence from the overall performance of the airborne “Analog”, “Analog-1” and the spaceborne remote sensing "Cosmos-1500" facility have been scrutinized and indicated that these systems were highly efficient tools for remote sensing of ice and the sea surface. Nevertheless, the remote sensing of different types of grounds and vegetation with their diverse physical radio wave scattering properties has as yet been a challenging multiparametric problem. This particular issue could be effectively dealt with by means of radar sensing using several frequencies and polarizations. The synchronous radar images produced at essentially different frequencies and at diverse combinations of polarizations of emitted and received radio signals offer a large number of features that specify an object. It is just for this reason that multifrequency remote sensing systems can be utilized not only to tackle a broad range of sea- and ice-related issues but also to make an in-depth study of land.
The period between 1988 and 1989 saw the designing and development of the multipurpose airborne radar system, otherwise referred to as "MARS" [140-143]. It was mounted aboard an IL-18 aircraft acting as an airborne experimental laboratory. This research and engineering effort was undertaken by the technical staff of the Ukrainian-based entity like the Institute for Radiophysics and Electronics of the NASU. The afore–mentioned airborne radar facility was destined for on-line use in tackling a wide variety of scientific and practical issues pertinent to all-weather remote sensing and environmental monitoring of the sea surface, land, brine, fresh-water ice and glaciers. This radar complex was also targeted for monitoring of a coastal trading zone, vegetation covers and soils as well as for subsurface sensing (including the detection of buried objects and searching for manifest signs of mineral resources.
Apart from radar sensing operations, the complex “MARS” was also aimed to validate those engineering developments that formed the basis of the project for the advanced multipurpose system for remote sensing of the Earth’s environment from space carriers [144-146].
The information–acquisition and data–handling advantages of the “MARS” are dependent upon the multifrequency sensing of any objects. These frequencies are opted in terms of taking into account the specific features of scattering by these objects and the penetrating properties of microwave radiation.
The afore–mentioned complex (see Fig.2.16) is composed of X- and Ka-band side-looking real-aperture radars (SLAR-3 and SLAR-0.8) and the L-and VHF-band synthetic- aperture radars (SAR-23 and SAR-180). The key operational data are listed in Table 2.6. The layout of the radar antennas aboard the IL-18D shown in Fig. 2.17, and the placement of the clustered systems of the complex inside the aircraft is presented in Fig.2.18.
The distinctive features of the airborne ”MARS” system are as follows: • high potentiality of all the radars; • absolute calibration of the operational capability of all radars is made feasible (a
combined calibration technique was utilized [142, 147]); • integration of short-wave side-looking radars (SLAR-0.8, SLAR-3) built around
the conventional circuit typical of a pulse real aperture radar, and two long-wave synthetic-aperture radars (SAR-23, SAR-180);
• use of an active phased antenna array (APhA) in the SAR -23 . This array has a system that can control the position of the antenna pattern (AP) in a space to ensure that the SLR and SAR images of the sea surface under study are rapidly matched and aircraft yawing angles are compensated;
• using the radio pulse chirp–modulation signals in the SAR-23 and SAR-180;

115
• onboard real-time processing of signals coming in from all the systems in an effort to acquire on-line data ;
• hologram recoding of the object at hand in the SAR system with the goal of onground acquisition of synthesized high-resolution images;
• utilizing GPS navigation data.
Fig.2.16. Complex "MARS" block diagram

116 Table 2.6
The key performance characteristics of the "MARS" system SLAR-0.8 SLAR-3 SAR-23 SAR-180 1. Wavelength range Ka X L VHF 2. Wavelength, сm 0.8 3 23 180 3. Duration of sensing pulses: radio pulse, secµ compressed chirp pulse,
secµ radiated chirp pulse, secµ :
0.15
0.15
0.15 7
0.25 28
4. Radiated pulse power, kW 50 100 1.5 0.3 5. Radiated signal spectrum
width, MHz
6.5
6.5
12
6.5 6. Sensing-pulse repetition
frequency, Hz
1000
1000
1000
1000 7. Receiver sensitivity, W 10 −12 10 −13 10 −14 5х10 − 14
8. Antenna gain, dB 33 30 19.4 11 9. Beam width, degree:
in azimuthal plane in elevation plane
0.3 50
0.6 42
3.7 63
35 70
10. Antenna type Diffraction radiation antenna
Waveguide slot
antenna
APhA PhA
11. Control of antenna pattern position in azimuthal plane
-
-
32 steps (± 10°)
-
12.Polarization VV, HH VV VV, HH, VH, HV
VV, HH, VH, HV
13. Swath width, Km 15 2 х 45 15, 30 30, 60 14. Initial swath angle, degree 20 20 20 20 15. Spatial resolution, m
30…50* 20…50* 25…50* 2.5…25**
50…100* 10…50**
16. Output data stream 128 Kbit/sec…6.4Мbit/sec** • Onboard digital data processing • ** Onground data processing

117
Fig. 2.17. Arrangement of the “MARS” radar antennas aboard the IL-180 aircraft.
1 - SAR-180 antenna, 2 - SAR-23, 3 - SLAR-3, 4 - SLAR-0.8
Fig. 2.18. Placement of the “MARS” instruments inside the IL-180 cabin
The “MARS” instrumentation package allows the underlying surface to be surveyed in two basic operating modes. During patrol operations the radar-covered swath width is maximal under these modes. The SLAR-0.8 swath is 15km, the SLAR-3 is set to do surveying over two swaths (within 45km in either direction to the left- and to the right -

118 side). The SAR-23 and SAR -180 swaths are equal to 30 and 60 km respectively. To extend the swath the SAR data can be processed so as to add up the SAR swaths. In the case of multifrequency sensing (see Fig. 2.20) the swath widths provided by all the radars are made to agree with one another in a space, and the synchronized surveying operations are performed over 4 radio frequency ranges.
Fig.2.19. “MARS” operation in a patrol mode
Fig.2.20. “MARS” operation in a multifrequency sensing mode
In the following section of the present book the reader will have a chance of
looking into numerous examples of radar images acquired by the “MARS” complex and the ways in which they are interpreted and employed. Airborne Complex for Remote Sensing – ACRS-30
The data handling-retrieval capabilities of the “Analog” and “MARS” complexes and a variety of remote sensing tools used in the modern airborne remote sensing systems have been analyzed. It was then concluded that a far broader spectrum of scientific and practical problems can be solved (with low cost being incurred) through the combined use of active radar, optical and IR systems. Thus, one may well take advantage of a unique possibility to simultaneously determine scattering, reflective and radiating parameters of a surface under study.
This concept was framed and later realized by the experts of the Kalmykov Center for Remote Sensing of the Earth of the NASU and the NSAU in close cooperation with the experts of the Scientific Centre for Aerospace Research of the Earth of the IGS of the NAS of Ukraine (CASRE IGS NANU) and the Antonov Aircraft Scientific and Technical Complex. It was exactly a highly proficient team of engineers and researchers who had made a tangible contribution to evolving a novel design concept of an airborne multipurpose complex for remote sensing of the environment, which in an abridged version is referred to as the ACRS-30 [148].
This complex is composed of a double–frequency radar system incorporating a Ka-band SLAR and L-band SAR, an IR scanning radiometer, optical-range multichannel spectrometer, aerial camera and system for the onboard processing storage, interpretation and display of remotely sensed data as well as a GPS-type navigator receiver. The ACRS-30 is destined for tackling a broad spectrum of issues in the national interest of Ukraine’s

119 regions. The primary goal of this system is to promptly detect the precursors of different natural and technogenic disasters, to monitor critical events such as floods, overflows, ice jams on rivers, large-scale fires, etc., to bring out the manifest signs of mineral deposits and finally to search for vessels illegally violating the coastal trade zone borders, etc. The above complex is accommodated inside the fuselage of the AN-30 aircraft which is under the Ministry for Emergency Situations of Ukraine. Its operating costs are rather low and aircraft performance characteristics are relatively high.
The ACRS-30 major parameters are listed in Tables 2.7-2.9.
Table2.7.The major parameters of the aircraft radar complex for remote sensing "ACRS-30"
Operating radio wave band
Ka (8 mm) L (23 cm)
Radar type SLAR SAR
Signal polarization VV VV, HH, VH, HV
Pulsed radiated power 16 KW 0.5 KW
Sensing pulse length 43 ns 10 secµ
Operating altitude range 500m – 7000 m
Operating swath width 15 km
Medium spatial resolution 7m –10 m
Limited radar cross-section to be detected 0.03 2m 0.025 2mData processing on-board digital
Data display on IBM PC monitors
Total weight 85 kg 70 kg
Total consumption power 1 KW 1 KW
Attending personnel 1 operator 1 operator
Table 2.8. Basic characteristics of the aerial cameras as integral parts of the ACRS-30
Parameters АPhА-41/7,5 АPhА-41/10 АPhА-41/20 Type of lens Оrthogon-1 МРО-2 Оrion-20 Focal length 75 mm 100 mm 200 mm Relative aperture 1:6,8 1:8 1:6,3 – 1:22 Viewing angle 1190 1040 650
Coverage width (H=6000m) 14,4 km 10,8 km 5,4 km Length of route (overlap 60%, H=6000m)
1612 km 1210 km 605 km

120 Table 2.9. Basic characteristics of the IR scanner “Malakhit -1”
Name of parameters Value
Tangential velocity W/H, с-1 0.05 –0.36
Scanning of terrain 3.4Н
Instantaneous field of vision, rad 1.75⋅10-3
Spectral range, mµ 8 – 14
Energy resolution at 200C at a S/N ratio of 1, 0C 0.1 – 0.15
Rotational velocity of the scanning prism, revo 2250
Line frequency, Hz 150
Band pass of electronic channel 1Hz –150 kHz
Photographic film type 42L
Film pulling rate, mm/s 0.8 – 7.2
Basically the ACRS -30 can be operated at the same rate with a Ka-band SLAR
and a L-band SAR. In terms of the operational potential and space resolution, the performance characteristics of these radars come closer to each other, and as a result, the informative capabilities of the entire complex tend to increase considerably. In this context the Ka-band SLAR uses chiefly a vertical polarization of emitted and received signals, whereas a L-band SAR can be set to any polarization combinations.
The on-line radar data processing is performed onboard an aircraft. A series of onboard operations is being carried out, specifically, storage, visualization of acquired images and transcription on an ancillary computer to provide for on-line onboard data interpretation. This type of operation is particularly indispensable to monitoring fast- occurring processes. In Fig 2.21 shown is the ACRS-30 block diagram.
By now the Kalmykov CRSE and CASRE experts have finished off the initial phase of designing and developing and testing of the above complex that incorporates a Ka-band SLAR, an IR scanner “Malakhit-1”, an aerial camera, a video spectrometer and a video camera. The general view of this complex and the arrangement of the main instruments of the complex inside the fuselage of the AN-30 aircraft are shown in Figs. 2.22, 2.23.
In addition, the work on designing and constructing the L-band SAR system is expected to be completed in the immediate future, and this particular complex facility will then be provided with ancillary equipment. In addition, it is possible that the VHF–band (215-cm) SAR rather than 23-cm SAR might be re-equipped. Such an equipment alternative is primarily aimed at being applied in those countries where dry ground is prevalent and one can make an extensive use of the subsurface sensing using ultrashort wave radar [40].

121
Fig. 2.21. The ACRS-30 block diagram
Fig.2.22. The general view of the ACRS-30

122 а b
c
Fig.2.23.Arrangement of the ACRS-30 instruments in the AN-30 aircraft cabin; a - aerial camera and IR-scanner, b - SLAR receive transmit unit, c - workplaces for controlling the radar section of the complex (at the far left), the primary data processing (at the near left), real-time on–board remotely sensed data interpretation (at the right)

123 Characteristic Features of the ACRS-30 SLAR antenna system
The ACRS-30 uses a cosecant antenna pattern in an elevation plane to afford highly efficient SLAR operational capabilities. This type of antenna is now increasingly utilized both in radar systems and in communication systems in an effort to ensure that objects located on an inclined surface are uniformly irradiated. The requirements for the pattern shape may vary dramatically depending upon a particular issue to be solved. For instance, when mapping the Earth surface using a SLAR it is necessary to make use of the ultimately smooth pattern in an operating range of angles with a lesser gain at the origin of a swath. In general, the magnitude of operating range of angles ϕ∆ does not exceed 40° and is within ϕ = 30° to 70°, if the observation angle is counted off from nadir (see Fig.2.24). The cosecant dependence of the antenna gain should be obeyed with respect to angleψ . Yet the corresponding observation angle dependences ϕ = 90°- ϕ will later be shown, this angle being more widespread in radar sensing of the Earth’s surface.
Fig.2.24. Disposition of Ka-band SLAR antenna on the aircraft. (+) direction of counting the positive observation angle values ϕ ; (-) direction
of counting the negative observation angle values ϕ
In radar mapping of an underlying surface, the SLAR side lobe level in the elevation plane (beyond the limits of an operating range of angles) is of minor importance. Alternatively, the steepness of the pattern’s far slope at °> 70ϕ has to be relatively great because it is important that the power losses by wasteful scattering in space be reduced and the radar potential be enhanced. By and large, the cosecant pattern, if it is actually used, allows one to augment the antenna gain by 5 to 6 dB as the against the case where the symmetric pattern is utilized, and thus the SLAR operating potential tends to increase dramatically from 10 to 12 dB.
The diffracted radiation antennas consisting of a diffraction grating and a dielectric waveguide [149,150] are in full accord with the set requirements. An in-depth study into the scattering properties of different diffraction gratings and directional characteristics of dielectric waveguides has brought out novel features of transforming slow surface waves to

124 volume waves. Only if these waves are taken into account and appropriately used one can obtain arbitrarily configured patterns.
As is known [151, 152] the diffraction radiation effect is observed in the dielectric waveguide’s slow surface wave scattering by the diffraction grating (see Fig. 2.25). Now assume that the fundamental wave propagates down the dielectric waveguide in the
direction of oz axis with the slowing factor 1E
phU c V= , where is the velocity of light in
a free space, is the slow wave phase velocity.
c
phV
Fig.2.25. Electrodynamic structure of a diffraction radiation antenna.
1 – planar dielectric waveguide; 2 – comb
It is exactly the diffraction grating whose period scatters a slow surface wave of
the dielectric waveguide that generates the spectrum of homogeneous and inhomogeneous plane waves. Given
l
( ) ( )1 2Uλ λ 1U+ < < +l , where λ is the wavelength in a free space, the homogeneous wave spectrum is characterized by the presence of a single spatial harmonic with a number 1−=n , whereas its radiation angle counted off from oz axis is equal to:
⎟⎠⎞
⎜⎝⎛ −=−
l
λθ Uarccos1 (2.1)
For a constant diffraction grating with period l the partial waves outgoing from each elementary radiator are added up through the same angle (in-phase) in one direction alone, while the diffraction grating of limited length forms the pattern of classical type, L

125
say, of the form X
Xsin, so that the amplitudes are uniformly distributed. A more intricate
pattern can be shaped by varying the diffraction grating and waveguide parameters along the surface wave–period structure interaction area. The primary goal of synthesizing the plane structure with a cosecant pattern is to ensure that, similarly to mirror antennas, separate regions of a relatively large aperture might produce radiation at different angles θ to the waveguide axis.
Radiation preset–wavelength angle 1−θ can be varied by changing the dielectric
waveguide thickness and the associated slowing factor U and through a gradual change in grating period (see Fig. 2.26). The last variant appears to be more reasonable, because it enables the angle
lθ to vary widely (from 84° to 180° at U =1,2), and it is more feasible in
practice.
Fig.2.26. Shaping of the cosecant pattern using the variable diffraction grating period The pattern of the waveguide–grating system was calculated via the integral
Kirchhoff representation for the far-zone fields. A model of a linear finite non-equidistant grating of isotropic radiators was utilized. The exciting field phase of each radiator was
taken to equal n1
n
ii
Ô γ=
= ∑ l , where Uλπ
γ2
= is the longitudinal wave number of the
dielectric waveguide, are the grating periods, il ( )0 0Ô = . The amplitude aperture distribution was assumed to be a truncated cosine. The computational parameter was the magnitude of the field decay away from the center of the aperture towards its edges. The variable parameters to be applied in optimization were the values of periods of gratings and their quantity.
il
An optimization algorithm to determine the coordinates of elementary radiators allowed for the technological feasibilities of producing diffraction gratings. To this end, a

126 precision limitation of less than 0.005 mm was placed upon the allowable value of grating periods. In this case we succeeded in avoiding the errors due to rounding off.
As a result of computations, the geometrical dimensions of a radiating dielectric waveguide–grating structure were defined. An optimized pattern for the cosine amplitude distribution with the field level falling off towards the aperture edges of up to -23dB is shown in Fig.2.27. The corresponding values of the diffraction grating periods are presented in Fig.2.28.
Fig. 2.27. Estimated pattern with a cosecant shape of an operating area
Fig. 2.28. The value of the diffraction grating period as a function of its number
With the slowing factor of U =1.16 the variations in the periods ranged between and 3.8 mm. The oscillations of the pattern gain were within 0.1dB in an operating range of angles. The drop in the gain magnitude in the range of angles is 9.8 dB at a value of 8.1 dB needed for a particular case. Such a distinction results from a certain pattern roll–off at
5.6=l
°> 30ϕ . The sidelobe level is no more than -20dB at ϕ > 80° and can be treated as an acceptable one.
The periods whose numbers ( ) vary between 1 and 15 (see Fig. 2.28) configure the pattern zone with a maximum amplification factor.
N°= 9.98θ corresponds to
mm. The pattern section under study is formed with a grating segment in which the period varies slightly. Hence, there occur quadratic phase aperture distortions (given the initial phase is counted off over the interval between 0 and
2.6=l
π2 ). This is a critically important point, because the pattern that corresponds to a given section has degenerate sidelobes and, consequently, it does not bring about any gain oscillations in the middle part of the operating portion of the cosecant pattern at θ = 120°÷140°.
The cosecant pattern had been previously calculated with a certain fraction of abstraction and could possibly find a practical use only if a number of additional conditions were satisfied: 1. The coupling of the dielectric waveguide to the grating should be sufficiently weak for
the impact of the diffraction grating upon the phase velocity of the dielectric wave to be ignored. This condition was met when the parameters of a comb were properly chosen, primarily, the depths of grooves and a relatively great length of the grating.
2. The dielectric waveguide should be “transparent” to partial waves outgoing from elementary radiators, because the resultant pattern is configured after a wave beam has propagated through a plane–parallel dielectric layer which, in fact, acts as a dielectric waveguide. In this context, “transparency” is an essential feature both for a normally incident and for oblique waves up to θ = 150° (see Fig. 2.25). For θ ≈ 90° this condition is satisfied by choosing the dielectric waveguide thickness close

127
to ελ 2 ; for θ ≈ 150°, “transparency” is obtained due to the Brewster effect. In all cases it is desirable to utilize the materials with minimal permittivity values.
3. The joint influence of the grating elements can be ignored. The elements of the diffraction grating are spaced apart for less than a length and, consequently, their joint impact will invariably affect the energy and phase characteristics of a grating.
The experimental study into the previously computed pattern-forming ACDS-30 SLAR antenna system was pursued using the breadboard model containing a Teflon dielectric waveguide with the slowing factor of 16.1=U . The diffraction grating 210 mm in length consisted of 38 radiating elements, i.e. slots. The planar dielectric waveguide 500 mm wide was excited by a horn-parabolic junction. The radiator thus produced and consisting of the planar dielectric waveguide and the diffraction grating was energized at the end with a matched load whose SWR value is no more than 1.1. The experimental pattern of the entire system that has a radio transparent protective coating is shown in Fig.2.29. In general, one can observe a good fit to the estimated dependence. The maximum deviation from the ideal cosecant dependence does not exceed 0.5dB.
Fig 2.29. Experiment (1) and ideal (2) cosecant antenna pattern
The ACRS-30 antenna and its parameters are listed below (see Fig .2.30):
Operating wavelengths 8.1 ÷ 8.4 mm Gain 40.5 dB Polarization vertical Pattern width in vertical plane °40 Pattern width in azimuthal plane °21.0 Sidelobe level in azimuthal plane - 20 dB Losses 1.3 dB SWR 1.12 Overall dimensions 2050 x 850 x 60 3mm

128
Fig.2.30. Diffraction radiation antenna with a cosecant pattern of the ACRS -30 SLAR
The basic structural feature of the antenna described above is that an excitation unit is located in one plane with a planar dielectric waveguide. The excitation unit of the planar dielectric waveguide is built around the plane horn–parabolic configuration (Fig. 2.31). To render the antenna more compact the irradiation angle of the parabola is chosen to be close to 180°. To have the entire aperture uniformly driven presents some difficulty. In order to resolve it the horn is fitted with a dielectric insert that ensures half power division into two left- and right–hand channels and generates a combined pattern with a 4-dB roll-off in its central part. In developing the antenna exciter of the parabola an essential point was to maintain the phase center of the horn–dielectric configuration.
The horn–parabolic junction is built around 3-mm monomode hollow twin–plate metallic waveguide. The operating wave type is the TEM wave. In order to reduce the losses by the fundamental wave an ultra dimensional twin–planar metallic waveguide with a 7-mm interval spacing was employed. Therefore the losses in the junction are no more than 0.8 dB.
Fig. 2.31 Horn parabolic junction for exciting the dielectric waveguide. 1 - parabolic
reflector; 2 - twin–plane metallic waveguide; 3 - waveguide flange; 4 - dielectric insert; 5 - matched load

129
The distinguishing feature of the antenna construction is its low prime cost, which is attributed to its high manufacturability. The advantage of this system stems from the utility of open electrodynamic structures, specifically, a dielectric waveguide and a diffraction grating of reflection type, in which the surfaces have a free access to some kind of instruments. This enables obtaining a high degree of fineness and precision of manufacture.

130 §2.3 The criterion for informative characteristic properties offered by remote sensing radar systems It is a matter of general knowledge that a variety of present-day aerospace remote
sensing radar systems is relatively wide and extensively used in many countries. In this context what inevitably comes to mind is how to make adequate estimates of the amount and quality of radar data extracted by above systems and to decide on an optimal operating mode, which would produce the highly informative imagery to examine a particular physical formation.
The issues pertaining to estimating the useful informational properties of SAR and SLR images were discussed in a series of papers [144, 153-158]. Specifically, in [155] an informational measure referred to as “the distance between statistical hypotheses” is introduced to identify physical formations. This procedure is efficient in resolving the problems of comparing competing hypotheses. However, as indicated from the data usually provided by from the multipurpose radar facilities and later examined, there arises a need to formulate a large number of assumptions. First, the assumptions thus compared do not always give an adequate clear description of the systems being simultaneously analyzed. Second, they do not allow the multifunctional radars to be rapidly switched over to new operating modes (this is due to a considerable volume of computational operations). Third, the statistical aspect of the dimensions of physical formations and the time of their persistence are not taken into account (when the analytical treatment is carried out) in keeping with the potential radar performances.
The assessment of the absolute value of statistic data, which can be derived from a single resolvable spatial element (as it is suggested in [156], does not describe the quality and usefulness of this particular information when particular physical formations are explored. Rather, it is based solely on a priori data on the statistics of returns from an underlying surface. The SARs operating with a high space resolution and a narrow swath do not allow on-line extraction of data on large– and meso-scale formations. At the same time the image acquired by the medium–resolution and wide–swath SLRs clearly shows various kinds of mesoscale formations. At the same time the small–scale formations appear to be smoothed off or lost altogether, although an absolute amount of statistic information drawn from a resolution element (see [156]) both for the SAR and SLR can be identical (when we deal with the former and latter cases).
A critically new approach to evaluating the possibility of interpreting SLR imagery was proposed in [157] where the values of the so-called resolvable volume are used as the generalized radar efficiency measure. This volume is represented as the product of azimuth range and observed signal intensity indexes. In this case the quality (informativeness) I of images is expressed as )(/exp(0 cVVII s−= , where
)(Ν= PRV δδδθ , θδ is the index of SLR azimuth resolution; Rδ is the index SLR
range resolution; )(NPδ is the index SLR observed–signal intensity resolution; is the corresponding characteristic of an observable physical formation. This approach is quite straightforward and illustrative and serves to relate a certain quantitative estimate of radar potential capabilities to physical properties of observable formations on the Earth surface.
CV
However, this particular approach does not allow for the a priori statistical information on the nature of an underlying surface and the physical phenomena observable on it. Therefore with the operating modes of different radars being optimized and in making a comparative examination of pictures taken with different devices, it is necessary to consider not only the statistic a priori information on the underlying surface within a

131 single resolvable element, but also some information on the entire swath as well as the quality (usefulness) of this information whenever a particular issue is to be resolved.
According to [160], the total average amount of information I in set P of the observable (at the detector output) values of the signal power scattered by a single resolvable element with respect to set G of the scattering cross-section values (σ ) of the surface element is defined as:
( ) ( ) ( )( )∫ ∫ =⎥
⎦
⎤⎢⎣
⎡=
P σ
dPdσPW
P/σWP,σWP,σI log
( ) ( )( ) ( ) ( )( )∫ ∫ ∫−=P σ P
dPPWPWdPdσP/σWP,σW loglog , (2.2)
where the first component is the conditional entropy P under the assumption of σ , the second component is the entropy of the signal power values at the detector output; W(P) is the conditional probability density of values P; ( )P/σW is the conditional probability
density of values P under the assumption of σ ; ( )P,σW is the joint probability distribution density of values . The radar image contains information on the roughnesses and the texture of the underlying surface, and in terms of statistics, its quantitative estimate corresponds to the amount of data provided at the channel output (underlying surface-signal propagation medium-radar-signal processing unit). In this regard, expression (2.2) describes the amount of statistical data collected by the observation system from a single resolvable surface element.
P,σ
The total average amount of information ΣΙ in the area S of the picture is defined as:
( )∫ ∫=∑S
dSP;σII . (2.3)
In accordance with the physical nature of the problem, the quality of information (2.3) can be described by means of dimensionless functions ( )Sform,S,σSC and
),( ΤτC that characterize the relationships of spatial and temporal scales of the phenomena under study and SLR performance parameters:
( ) ( ) ( )∫ ∫ ∫=∑
S TSform dTdSP;σIτ,TC,S,σSCI , (2.4)
where ( ) ( )( ) ( )( )[ ]/Sm//σm,S,σSC SSSSform exp1exp12 +−−= ,
( ) ( )/Tmτ,TC τ−−= exp1 , T is the data processing and transfer time (to a user); is the mathematical expectation of time
τmτ of the physical formation persistence period (or: its
lifetime); Sδ is the resolvable element area; is the mathematical expectation of the
physical formation area . Sm
formSThe functions ),,( )( Sform SSC δοδ and ),( ΤτC have to be introduced to relate
the geometric dimensions of objects being explored to the performance characteristics of the radar acting as an “instrument” for research purposes. Besides, one has to keep in mind that any information is certain to become outdated, because this results from the finite

132 lifetime of a physical formation and the data transfer rate to the user. The influence of inserted weighting functions will be discussed below through a number of illustrative examples.
Specifically, in tackling the problems of detecting a hurricane at its genesis stage and measuring its spatial coordinates (typical linear dimensions of the formation being on the order of 10 to 50km), the highly informative images are those acquired by a 300 to 400km swath SLR, operating with a 1 to 5km medium space resolution and an efficient data transfer rate (in this instance a real-time operating mode is implied). When it comes to tackling a problem of exploring the texture of ice cover, fractures and cracks in ice (a typical size of formations being on the order of 10 to 100m), then the more preferable are the images acquired by a radar whose swath is narrower as against that of the SLR and whose spatial resolution comes to hundreds of meters. Moreover, this particular radar is capable of rapidly processing and transferring remotely sensed data.
Similar examples can also be provided in the exploration of land. To acquire the images of urban development areas the spatial resolution and the swath of the radars involved in different applications should be as high as 10 to 15m and tens of kilometers respectively. Alternatively, in studying vegetation covers, soils, etc. on vast areas, the informativeness of radar should be more efficient with its operational characteristics appropriately matched to physical formations being observed. Under these circumstances the time delay in data transfer rate may be substantially greater as compared to dealing with the issues on exploring the sea formations and ice sheets.
All the above reasoning suggests that the optimality criterion for the operating mode of the Earth surface observation system (which is called upon to produce the maximum imagery informativeness for the physical phenomenon under study) should also take account of the a priori information on the statistics of observable physical formations.
To take account of a priori information we can write the total imagery information as:
( ) ( ) ( )∫ ∫ ∫=∑S T
formSform dTdSP;σ;σIτ,TC,S,σSCI , (2.5)
where is the full average amount of mutual information. ( обP;σ;σI )Now we present function ( )formP;σ;σI included in (2.5) as:
( ) ( ) ( )/σP;SIP;σIP;σ;σI formform += . (2.6)
By substituting (2.2) into (2.6) and expanding the second component in accordance with the Bayesian formula [159] we obtain:
( ) ( ) ( )[ ] ( ) ( )[ ] ++−= ∫ ∫ ∫ dσσdP/σWP;σWdPPWPWP;σ;σI
P P σform loglog
( ) ( )( ) dPddS
SPWSPW
SPW formP S form
formоб
form
σσ
σσ∫ ∫ ∫
⎥⎥⎦
⎤
⎢⎢⎣
⎡+
/;/
log/; . (2.7)
The model of probability of interrelated random values P , , , which are
included in (2.7), can be simplified if one falls back upon the conditional independence property [160]. The conditional independence consists in the following: if realization of uncertain magnitude is known, and the knowledge of true value does not provide
σ formS
σ formS

133
any additional information on uncertain magnitude , then and are referred to
as conditionally independent with proviso that the value of σ is known. Then we have:
P P formS
( ) ( )P/σW,σP/SW form = , (2.8)
In view of (2.8) we have:
( ) ( ) ( ) ( ) ( )/σSWP/σW/σSW,σP/SW/σP,SW formformformform == . (2.9)
It should also be noted that on selecting the probabilistic models of interrelation of
random values and formS σ the nature of the specific problem being tackled should be
taken into account. In other words, provided that the informativeness of sea surface imagery is really assessed, where one can observe an explicit statistical dependence of dimensions and the nature of the physical formation with the RCS of the surface, one should make use of conditional model ( )/σSW form . As far as the land images are
concerned, this model is simplified and reduced to unconditional distributions
and .
)( formSW( )σWIn terms of analyzing the Seasat-A SAR images for different underlying surfaces
and using the data cited in [156, 157], we accept the following models:
( ) ( )( ) N
formN
formN
NNГPN/SSP
P/SW −
−− −=
exp1
, (2.10)
where N is the number of incoherently stored signals; ( )NГ is the gamma-function.
( ) ( )( ) N
NN
NNГPN/σσPP/σW −
−− −=
exp1
, (2.11)
( ) ( )⎥⎥⎦
⎤
⎢⎢⎣
⎡ −−⋅= 2
2
2exp
2 S
Sform
S
Wform σ
mSπσ
CSW , (2.12)
where is the variance of ; 2Sσ formS
1
11
−
⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛ −−⎟⎟
⎠
⎞⎜⎜⎝
⎛ −=
S
S
S
SW σ
maerf
σmb
erfC ; (2.13)
( ) ( ) 1
minmax−−= σσσW (2.14)
Substituting (2.11) – (2.13) into (2.9) and (2.9), (2.10) into the second term in
(2.7) (taking into account (2.14)) and calculating the corresponding integrals [160-162], we

134
derive an expression for function of ( )σ/, formSPI that describes an increased amount of
information on the underlying surface statistics:
( )( )
( )×
⎪⎩
⎪⎨⎧ −
= −2
2max 21
2 NS
S
NW
form NπσPNГ
NГπσNC/σP,SI
[ ] ( )×
−−−⎟⎟
⎠
⎞⎜⎜⎝
⎛× −2
22
maxmin2
2explnln
2exp N
SS
S
S
Nσ/m
PPσ
m
( ) ( )⎢⎢⎣
⎡+⎟⎟
⎠
⎞⎜⎜⎝
⎛× ∑
∞
=0
2
2
222 2142
221
21
42ln2
k
S
S
SSS
k!/ψσ
σm
;,ψσσ
+⎟⎟⎠
⎞⎜⎜⎝
⎛+2
2
2
k
S
S
σmk
( )⎢⎣
⎡×−⎟⎟
⎠
⎞⎜⎜⎝
⎛−
⎥⎥⎦
⎤⎟⎟⎠
⎞⎜⎜⎝
⎛++ ∑
∞
= NPσ
σNP
,NγPσ
mk!
kψmk
k
S
SS
max
max
max
maxmax
02
2
12
12
−⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛−−⎟⎟
⎠
⎞⎜⎜⎝
⎛×
min
max
max
min
min
maxmax
max
max 1σ
NPN,γ
NPσ
σNP
,NγPσ
NPN,γ
−⎟⎟⎠
⎞⎜⎜⎝
⎛−+⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛−−
min
minmin
max
min
min
max
max
minmin 11
σNP
,NγPσ
NPN,γ
NPσ
σNP
,NγP
×⎟⎟
⎠
⎞
⎜⎜
⎝
⎛−+⎥
⎦
⎤⎟⎟⎠
⎞⎜⎜⎝
⎛− − 21
2
min
min
min
min
222
S
SN
S
σm
erfcNπσ
σNPN,γ
NPσ
⎢⎣
⎡+⎟⎟
⎠
⎞⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛+−⎟⎟
⎠
⎞⎜⎜⎝
⎛×
min
maxmax
max
max
max
max
max
maxmax 1
σNP
N,γPσ
NP,Nγ
NPσ
σNP
N,γP
+⎟⎟⎠
⎞⎜⎜⎝
⎛++⎟⎟
⎠
⎞⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛++
minmax
minmin
min
max
max
min 1Pσ
σNP
N,γPσ
NP,Nγ
NPσ
max
minmax 1σ
NP,Nγ
N
−⎥⎦
⎤⎟⎟⎠
⎞⎜⎜⎝
⎛+−⎟⎟
⎠
⎞⎜⎜⎝
⎛+
min
min
min
min
min
minmin 1
σNP,Nγ
NPσ
σNPN,γP
+⎟⎟⎠
⎞⎜⎜⎝
⎛−⎢
⎣
⎡⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛−− +
max
max
max
max
max
maxmax
2 1σ
PN,γ
NPσ
σNP
,NγPN N −⎟⎟⎠
⎞
min
maxmax 1
σNP
,NγPN
+⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛−−⎟⎟
⎠
⎞⎜⎜⎝
⎛+
max
min
min
max
max
minmin
min
max
max
min 1σ
NPN,γ
NPσ
σNP
,NγPσ
NPN,γ
NPσ
⎪⎭
⎪⎬⎫⎥⎦
⎤⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛−+
min
min
min
min
min
minmin 1
σNPN,γ
NPσ
σNP,NγP , (2.15)

135
where ( ) ( ) ∫∞
−=−=X
t dteπ
XerfXerfc221 is the additive probability integral;
( ) ( )[ ]′= ZГZψ ln is the psi-function; ( )a,b,Zψ is the degenerate hyper-geometric
function; is the incomplete gamma-function. ( ) ( ) ( ) ∫ −−=−=X
tα dtetα,XГαГα,Xγ0
1
To illustrate the efficiency of the proposed criterion a comparison was made between the informativeness of certain previously tested earth–observation radars at different relationships of physical formation areas and the potential radar performance characteristics. In addition, the potential imagery informativeness has been calculated as a function of redundancy of observations and the underlying surface properties (see Fig. 2.32).
Fig. 2.32. 1 – Seasat )( ∞=τmat ; 1a) - Seasat )hours3( =τmat ; 2 – SIR-A; 3 - SIR–B; 4 – SLR “Cosmos -1500”; 5 - scatterometer; 6 - RADASAT-2 operating in a Ultra–fine–Narrow mode; 7 - RADARSAT-2 operating in a Scan SAR Wide mode; ASAR operating in a global monitoring mode.
A comparative analysis involved the use of the earth radar observation satellites
such as SAR ASAR, RADAR SAT-2, Seasat –A, SIR-A, SIR-B, SLR of “Cosmos -1500” type, Scatterometer. As seen from the chart in Fig. 2.32, the curves plotted in terms of values of and were associated with the optimal relation for each ΣI formS 1/ ≈SS form

136
observation system. The behavior of curves showing that const/σI ≈Σ correspond to the above dependences that were obtained in [160]. The discrepancy between the absolute values of is due to the fact that in [160] an amount of information from a single resolution element was calculated as a function of the number of incoherently accumulated pulses (see the first term in (2.6)). At the same time the present work provides the results from calculating the total information over the entire image area.
ΣI
The curves shown in Fig. 2.32 strongly suggest that the RADARSAT-2 system (operating in the Ultra–fine-Narrow mode) can provide highly useful information when exploring the physical formations whose typical extent range from tens of meters to units of kilometers. Other systems like Seasat-A, SIR-A, SIR-B furnish useful data, as they are involved in exploring the physical formations with the typical extent varying between 1 and 10 Km. As the above formations extend from 50 to 200Km, the informative ability of these systems tend to show a dramatic decrease. As a result, the developers of these radar facilities feel inevitably compelled to design costly multifunctional radar systems in which several tens of operating modes can be used to acquire a maximum amount of detailed information for a broad spectrum of radar-related problems being tackled. The multifunctional RADARSAT-2 SAR and ASAR might as well serve as good examples of this operational feature. As to the SLR “Cosmos -1500” and the scatterometer in question, they are found to be more efficient in providing useful information as compared to the Seasat-A type SAR, SIR-A, SIR-B when surveying the physical formations of 200 to 500Km in extent (an exception is made for RADARSAT-2 operating in a “Scan SAR Wide” mode and for ASAR operating in a “Global monitoring” mode). Moreover, the above radar facilities demonstrate their aptly organized operational capability to perform signal processing directly aboard the carrier and rapidly transfer imagery to a user. However, it should be noted that the commercial value of the entire equipment and the launch expenses of the systems like SLR “Cosmos -1500” are tenfold lower as compared to the systems similar to RADARSAT-2 SAR. The SLR informative capability tends to decreased, as the physical formation extent diminished. This was clearly accounted for by the loss of information because the potential spatial resolution characteristics were lower as against the SAR operational performance.
As the examination of informative capability of different radar systems suggests, the SAR-type systems are the most efficient in providing useful information when surveying the land surface and small-scale formations on the sea surface (for instance, oil slicks). In this context the SLR observation of land formations yielded poor data ( ). 210, ≈∞→ formlmτ
In addressing the sea and ice problems the spatial scales play an essential part in assessing the informative properties of radar operations. Of no less importance is the relationship between the processing time (the time when data are transferred to users) and the typical lifetime of formations being explored. Thus, in order to ensure that remotely sensed data are highly informative, the radar performances (or their operating modes) have to be selected with due account of the particular problems to be solved and the statistical characteristics of surfaces under study. Specifically, if there is a need to study the dynamic processes of melting and shift of ice sheets, to look into the land cover state (say vegetation, soils), then the operating potentials of the wide-swath “Cosmos-1500” and synthetic–aperture high resolution radar of RADARSAT-2, ASAR, SIR radar types need to be integrated to provide for on-line processing and real-time radar data transfer to users.

137
§2.4 Calibration features of air- and spaceborne SLR and SAR systems for on-line environmental monitoring of the Earth
By now the worldwide radar research community has seen a large number of
multipurpose radar complexes designed for remote sensing of the Earth. These complexes incorporate multifrequency, side-looking, real or synthetic aperture–antenna radars. It is found that the efficiency of comparing and thematic handling of remotely sensed data provided by these multichannel radars can only be achieved using the data on absolute value of the normalized radar cross-section (NRCS) of objects to be explored, whenever the above is measured at different frequencies. Regrettably, the experience with utilizing experimental air- and spaceborne radars suggests [163-165] that the multifrequency SAR calibration issues call for further investigation and need to be solved in a proper way. In this context it is of paramount importance to concentrate on working out the techniques for absolute calibration of remote sensing radars.
0σ0σ
Two methods of calibrating onboard radar systems [166, 167] are known to be the most widespread. One of them consists in using the radar cross-section -calibrated radar signal reflectors (this procedure is referred to as “external calibration”). The other method involves a continuous checking of all radar parameters (i.e., radiated power, receive channel gain, etc.) directly onboard, which is said to be “an internal calibration”.
)σ(
The internal calibration does not provide for high accuracy in determining the value of (the measurement error may be ≈4 ÷ 5dB [94,170]. This is because it is next to impossible to allow for the on–line tracking of propagation path parameters; the flight parameters are unstable (movement trajectory, spatial orientation and aircraft speed); it is a challenging task to check the antenna pattern (AP) and the antenna gain, etc. However, this calibration allows keeping watch on the time–varying equipment parameters that have an impact upon the radar output information. A continuous recording of the carrier’s flight parameters enables one to take account of their influence through calculation procedures at a later time. Normally, whenever an internal calibration is employed, special calibrators can be hooked up to radar or immediately embedded in its channel. The former devices are, for instance, the power meters and the standard signal generators set to control the transmitter radiation level and receiver sensitivity. The latter devices are the calibrators capable of determining the operational performance of the radar (potential) in actual operation.
0σ
The external calibration is the only way to determine the real parameters of a through channel (transmitter–antenna–receiver–processing unit). In this case a high accuracy of measurement (to an error of up to ≈2,5 ÷ 3dB [94,168-171] can be achieved by placing calibrated point reflectors (responders) or reference scattering surfaces immediately adjacent to formations under study. However, as the vast areas of the earth surface is being surveyed for a long period of time (especially in remote sensing of the sea surface, ice reconnaissance, operations during monitoring of mountaineons areas, etc) the placement of the calibrated reflectors in the areas being explored is virtually unfeasible. A major limitation on the use the external calibration is also the need for regular payload carrier flights over testing areas, this giving rise to some difficulties over the operation of the remote sensing facility complex.
0σ
The present Section of the book examines some distinctive features of the combined calibration system of aerospace-based remote sensing radars. The engineering concept was designed and developed by a team of researchers and radar specialists under the supervision of Prof. A.I. Kalmykov at the A. Ya. Usikov Institute for Radiophysics and Electronics of the National Academy of Sciences of Ukraine, the Kalmykov Center for radiophysical sensing of the Earth of the National Academy of Sciences and National Space

138 Agency of Ukraine. Special attention was focused on the radar facilities such as EOS SLR “Cosmos-1500”, “Okean” series EOS - “SICH-1”, “SICH-1M”, SLR and SAR of aircraft complexes “Analog”, “MARS”, “ACRS-30” [137-141, 148, 171]. All the above facilities are intended to integrate a continuous internal calibration of each of radar channels with a periodic external calibration against small-size point reflectors with a known RSC , which are located close to the objects under study (or on specially equipped testing areas). The internal calibration just as it is being performed, compares the onboard signal producing sources to those received signals from an external primary standard, and its subsequent function is to use the results of this comparison in between the external calibration sessions in an effort to assess the properties of the surfaces under study.
)σ(
Clearly in order to obtain the great accuracy of measurements during the entire flight the basic radar parameters relative to the transfer gain of the receive-transmit channels and the processing system have to be continuously checked at the intervals between external calibrations. At the same time the current flight parameters need to be recorded as well.
The afore–mentioned technique had been put to all-around evaluation test aboard the multipurpose airborne radar system “MARS” which incorporates two SLR's
,8.0( 1 cm≈λ SLR-0.8; ,32 cm≈λ SLR-3) and two SAR's with APhA ,23( 3 cm≈λ
SAR-23) and with PhA ,180( 4 cm≈λ SAR-180). The major feature of implementing the “MARS” SLR and SAR internal and external calibration procedures is that the ultrasound microwave signal delay lines are widely used. These lines offer new opportunities for continuous measurement and checking of the SAR performance characteristics. The SLR and SAR calibration system implementation and the calibration data will be described and cited below.
SLAR calibration The airborne “MARS” SLAR-3 and its spaceborne analogs (EOS-type SLR of the
“Cosmos-1500” series) have been characterized by some distinguishing calibration features. They consist in the uninterrupted automatic internal calibration of the radar potential, namely, of the end-to-end channel like a transmitter, a receiver and a signal processing unit (SPU). The above calibration (automatic, internal) is regarded as the most unstable.
The parameters of the SLAR antenna system are assumed to be far more stable. They are rigorously measured on the ground prior to launching and put to periodic in-flight tests. To ensure the stability of these parameters special-purpose constructive measures were taken. This calibration procedure allows the RCS to be completely determined on a real-time basis, and in this particular case there is no need to take separate measurements of the transmitter power, the receiver sensitivity, gain factor of the reception chain and the processing channel.
This type of calibration was accomplished as follows (see Fig. 2.33): part of transmitter-radiated power was fed to the receive chain input via an ultrasound yttrium aluminum garnet MW-delay line (MW-signal delay is 6 to 8 secµ ). As it occurs, the calibration signal attenuation periodically varies according to the prescribed law. This was necessary to ensure checking of end-to-end amplitude characteristic of the channel: a receiver → onboard data processing system → an information transfer line. The calibration data at the processing system output were matched to return signals.

139
Fig.2.33. The block diagram of the SLAR calibration system
The power of the signal returned from an observed object at the output of
the signal processing unit can be written as: procΡ
( )
kR
GРP ⋅⋅⋅
⋅⋅= σ
4 43
22rad
proc.π
λ, (2.16)
where is the radiated power, W; G is the antenna gain in the direction of an area being
explored; R is the slant range to an area; is RCS of an observed area, ; radΡ
σ 2m λ is the radio wavelength, m; k is the transfer factor of the receiver and the processing channel.
The power of a calibration signal at the output of the signal processing unit can be given as: calΡ
γ
kPP radcal
⋅= , (2.17)
where γ is the total attenuation of the calibration channel to the microwave receive input.
In that case, by taking simultaneous measurements of the ratio and , we obtain: procΡ calΡ
cal
proc
P
PC ⋅=σ , (2.18)
where ( )
γG
RC
⋅⋅
⋅=22
434 λ
π is the function dependent upon an angle of observation (range)
and which is determined computationally. Clearly one has to make preliminary on-ground measurements of the losses in calibration channel γ and antenna gain G (and its angular dependence). The airborne SLAR antennas are rigidly attached to the aircraft fuselage

140
and theupon
SLR is an operation, the receive chain and the
als received
the RCS values were calculate
whereas the spaceborne SLR antennas are similarly fixed in space upon having been unfolded. In this case the compatibility of antenna parameters to those previously measured is checked during the onground test measurements from the data of calibration complexes described below.
As seen from (2.18), in using this type of calibration, the variations in power rad
total amplification of the receive and processing channel do not have any effect the results from measuring the value of σ.
The normal practice suggests that, as the
Ρ
processing system amplification factor need to be controlled. For one thing, it is due to the varying scattering power of surfaces to be explored (the RCS may range from -30 dB for the sea surfaces and to + 10 dB and above for different kinds of covers) and, for another, this is bound up both with different angular dependences of the normalized RCS of diverse types of an underlying surface and with the variations of the antenna gain in the SLR swath. Here it should be noted that the level of a received signal and the receiver’s dynamic range were correlated by changing the gain of the receiver. At the same time the radar image brightness was range-leveled (along the radar image line) by means of the receiver gain time control (TGC). In this case if there was no need to take account of the variation in the total gain, then its slant range dependence had to be recorded and calculated in a proper way. Since the real TGC configuration in the airborne SLRs was rather sophisticated and manually controlled at each measurement run, then in order to record such a real dependence, the service oscillator was connected to the reliever input (following the measurement cycle) via the directional coupler (see Fig. 2.33). The above oscillator controlled by an operator helped to specify the level of the receiver output signal according to a calibration pulse. At the output the recorder indicated the signal in the form of a reference calibration curve that obeyed the law of time-varying gain. In space-based SLRs this law was approximated by a linear dependence and became ultimately established when onground optimized because of the significantly smaller range of the surveying angles.
The RCS values of the surface being explored, whose levels of the sign from the surface would be coincident with the calibration amplitude curve on the
correspondence ranges, were calculated in accordance with (2.18). In the general case (at any level of a returned signal)d using the family of calibration curves obtained within the limits of the receiver
dynamic range when the amplitudes were compared. The curves were recorded through a stepwise change in the attenuation of the oscillator reference level. The magnitude of attenuation relative to the reference level was taken into account when the RCS was determined according to (2.18) by changing the value of γ . Once the RCS value (σ) of the
area under study was evaluated one might well determine the normalized RCS value ( 0σ ) by rmalizing 0 /σσ S= 0S is the projection of a radiated pulse volume onto the surface, m
no (where 02).
Our estimates indicated that measuring the NRCS of the surface was in total error of 2.5 to 3 dB. The comparisons between the obtained values and the external calibration data from the corner reflectors were made time and again (see Table 2.10), and they confirmed the results from the external calibration procedure and were indicative of the SLR superior metrological performance characteristics.
To ensure that in the general case the absolute values of the NRCS of the surface were obtained to a high accuracy, one also needed to take account of the propagation conditions on the flying vehicle-the Earth route. The data on the wave propagation condition at Ku- and X-bands could be taken from [172].

141
SAR calibration combined calibration was performed in two stages. The first (external
calibratio
osely associated with the active radar surveyin
The SARn) was intended for radar surveying of a special part of the surface where the
reference signal sources were disposed. As the above process occurred, with the surveying being concurrently made, an attenuated signal was fed through the internal calibration system into SAR receive channel from the transmit channel which was subsequently utilized as a calibration signal. At the instant the reference and calibration signal amplitudes were compared, the internal calibration system was involved in continuous recording of the aircraft flight and SAR performance parameters.
The second calibration stage was clg of surfaces to be explored. This procedure was likewise carried out along with
continuous recording of aircraft flight and SAR performance characteristics through the use of the internal calibration system. The value of 0σS of the surfaces already studied was estimated (including the indicated surveying param ters) by comparing the amplitudes of the signals picked up from the observed surfaces and the internal calibration signals that were obtained from the data in the first calibration stage. This comparison could be made not concurrently with surveying of the observed objects but rather at the intervals between surveys or their runs. An ultimate expression for 0σS to be determined from the two-stage calibration results had this form [173]:
e
( )( ) 4
refS
2
S TGCIFS
2
Nref
2
ref
4
Sref
2
ref TGCref IF
2
NS
2
S
el.ang.azim
ref0S
σσ
RGkkUU
RGkkUU
⋅⋅⋅⋅−
⋅⋅⋅⋅−⋅
⋅=
⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛
θ
θ
δδ (2.19)
where ref and S are the symbols specifying the values measured for an external reference and an object under study, respectively; azimδ and angel .δ are the azimuthal and elevation-
of-angle resolution; U and U are the signal an plitudes at the output of the
SAR processing system k k are the gains of the intermediate frequency (IF)
channel and the TGC confi uration the receiver; G(
N d noise am
; IF and
g of TGC
θ ) is the antenna gain; θ is the incidence angle, R is the slant range.
The comparison (2.16) to the similar expression derived for from the internal
calibratio khe first ca
calibration, let us examine the causes of possib
re
0σS
n data [170] indicated that these data differed by the value of / k only in the case where the surveying of the external reference was made in t libration stage, the amplification of the receive device channel being different from the gain when an observed object was surveyed in the second stage.
Now, in terms of the results from combined
IFSIFref
le errors that gave rise to the degraded accuracy in determining 0σ . According to (2.19), the internal calibration system was bound to measure the ceive channel characteristics (gain and TGC configuration) and to check their stability both at the moments of receiving the signals echoed from reference point reflector and the observed objects and during the intervals between these measurements. It should be noted that it was particularly difficult to perform continuous checking of the SAR antenna gain )(
S
θG . Normally the values of )(θG were measured at the onground testing stage. The practical

142 at, asexperience suggested th the antenna system was in operational use, the value of
)(θG was unlikely to vary, because the variation in )(θG might only be brought about by anical displacement or damage of rigidly fas vibrators of the antenna array
enclosed by a radome for protection against external exposures. Therefore, in order to check the value of )(
a mech tened
θG , it would suffice for the internal calibration to check on the amplitude-phase char tics of receive-transmit channels of the SAR active phased array (APhA). Basically, as this type of checking was maintained, the major residual errors were those in determining range R to an object and the real azimuth resolution
acteris
λδ ⋅= RLbaz /2 (where bL is the synthesized aperture length). Since the range to an s determined from the GPS system data with fair accuracy, a strong need
arose to minimize an azimuthal resolution determination error, which resulted from the precision of calculating an effective length of onboard aperture synthesizing bL . To
estimate the value of bL , onboard simultaneous recording was made of a synthesized image, total unprocessed signal (of a radio hologram) and flight parameters. The onground processing of radio holograms was performed using the algorithms similar to those utilized onboard and in this case allowance was made for all flight instabilities. The effective onboard synthesizing length bL can be written as [142]:
observed object wa
LL gb K ⋅= , 22
22
gng
bnb
UU
UUK
−
−= .20)
here is the onground esizing length; and are the amplitudes
board nground
(2
bL synthw gb UU , gnbn UU ,of signals of the external reference and noise in on and o synthesized images respectively.
Thus, when the equipment operation was stable, the flight parameters were know and the correction were made to the results from onboard synthesizing, the use of the combined calibration enabled one to obtain a high instrumental SAR system accuracy comparable to the one achieved at internal calibration (2.5 to 3 dB).
The internal calibration of the SAR of the “MARS” complex was featured by some specific arrangement and procedures which were characterized by the different realizations of antenna systems (specifically, this was an active phased array (APhA) with an electronically controlled pattern in the SAR-23 and an uncontrolled phased array (PhA) in the SAR-180). These differences made themselves evident both in choosing the internal calibration techniques and in resolving the most challenging internal calibration problem, i.e. in making sure that the basic parameters of the SAR antenna array were continuously checked (i.e., the gain, the width of the antenna pattern and its shape). As indicated earlier, in order to check the above parameters it would suffice that the SAR internal calibration could provide for a continuous checking of the stability of the amplitude-phase characteristics of SAR APhA/ PhA receive-transmit channels.
The SAR-23 APhA was an electrically controlled multielement (16-receive-transmit vibrators) high-gain antenna array )4.19( dB≈ . This array was used to allow the chirp-signals to be received and transmitted al or horizontal polarization and to allow a rapid change (within 1 to 3 sec
with a verticµ ) in the spatial position of the total pattern in an
azimuthal plane ( 010± ) . For the S 3 APhA, use was made of separate active feed AR-2

143
tion asystems (16 recep nd 16 transmission channels) of the common antenna array. The APhA arrangement made it possible to design the multifunctional system of its continuous calibration and to check its function (see Fig. 2.34).
Fig. 2.34. The functional diagram of the SAR-23 APhA calibration of the
he principle of the above-me eration was as follows. Part of
airborne “MARS” complex
ntioned calibration system opTthe output power produced by each of the 16 transmit channels periodically arrived at the input of the microwave delay line (operating according to the repeated reflection principle) through a system of “transmission/calibration” commutators, a summer and a circulator. Line-delayed radio pulses were fed via a divider and a system of “reception/calibration” to a symmetric-in-number input of the receiving phasing system (the 1-st to the 16-th, the 2-nd to the 15-th, etc.). In the case where the phasing system of the APhA receiving and transmitting parts did not exhibit any tangible signs of malfunction, the radio pulses were equal in amplitude and phase (this was because they go through the circuits that had an equal electric length and a required degree of attenuation). With amplitude or phase being different in any of the channel pairs, it was quite evident that the transmitting or receiving parts were faulty. The measurement accuracy was basically governed by the stability of the microwave delay line characteristics. It was for this reason that the microwave line was enclosed in a special thermostabilized casing. The accuracy of these measurements was tested by comparing them to the results from direct measurements of amplitude and phase characteristics of the APhA receive and transmit channels. The proposed technique could be used to compare the transmission coefficients of the receive-transmit channel pairs to an accuracy of about dB15.0± and to determine the difference in phases between them with an error of no more than 00 53 to . Using the different switching modes of fast-acting microwave commutators o -n diodes permits of retrieving on-line information (which is recorded in a service portion of an image line) on the operating condition of all pairs of receive-transmit APhA channels. This was accomplished immediately in radar surveying of observed objects and in tuning the corresponding equipment and in pre–flight APhA testing.
±n the p-i

144
equire that the receiving device and the configuration of its temporal gain control (
cial "wedge") of the signal w
The conditions under which different types of objects to be explored were being surveyed often r
TGC) be operationally changed. The on-line checking of the above parameters was provided through the use of the SAR calibration mode. In this particular mode a series of pulses generated by the microwave delay line through multiple re-reflections in the above line under the already known attenuation law was time-delayed to be located within the operating intervals of delayed signals that entered the receiver from the surface being explored. The amplitudes of the pulse train were doubly recorded, i.e. in on and off modes of the receiver TGC. A comparison between the data thus obtained enabled one to restore the receiver TGC configuration and assess the receiver dynamic range.
The microwave delay line within the SAR-180 internal calibration system of the "MARS" complex was used to generate tapered calibration levels (a spe
hich, as well as in the SAR-23 facility, were recorded in the service section of an image line. To this end, part the output microwave amplifier power fell on the calibration system (see Fig. 2.35). The level of tapped power was controlled by a step attenuator (16 steps) with a spacing of ~ 3 dB. The step attenuator along with a microwave delay line was set to keep the required signal calibration level so that the signal could be transmitted so as to ensure the unrestricted signal transmission through the receiver. Of the microwave line-generated pulse packet, a switch at the output of that line allowed the second (2-nd) pulse to enter the receiver, the 2-nd pulse being delayed for 30 secµ with respect to the radiated one. This signal was likewise amplified in the receiver and then processed in the SPU with the algorithm just as the signals received from an obj nder study. To facilitate the subsequent data processing the step attenuator was switched over to the next position within 3 sec. The power level of the radiated signal was determined with the known transmission factor of the calibration channel and the signal stability was concurrently checked. Besides, the amplification and the dynamic range of the entire receive channel was being monitored and the SAR-180 potential was also measured. To improve the calibration accuracy the microwave delay line (as well as in the SAR-23) was enclosed in a special thermostabilized casing.
ect u
Fig. 2.35. The functional diagram for calibration of the "MARS" SAR-180
OngrouTo conduct the external calibration and onground testing of the major "MARS"
s developed, and the
nd testing / calibration module of the “MARS” complex
radar parameters a special-purpose testing /calibration module wa

145
active an
al. The dim
ase modulator (see Fig. 2.36 a) and the microwave delay line (see Fig. 2.36 b). In the ATs
aracteristics onground. Using the transpo
ig.2.36. Function diagrams of active (a, b) and passive (c) transponders for sting and calibration of “MARS” SAR. a - phase modulation transponder; b,
c – delay line transponders; 1, 2 - AT switching variants
d passive point transponders (AT and PT, respectively) were included as the main constituents of the above module (see Table 2.10, Fig. 2.36). The external calibration of all “MARS” complex radars was simultaneously performed against the calibrated reflectors (see Table 2.10) which were installed on a special testing area (see Fig. 2.37). It has to be pointed out that the measurement accuracy is significantly affected by the excess of the calibrated reflector signal over the terrain background. If we take as an example for analysis the radar facilities like SAR-23 and SAR-180, then one is bound to see that the required measurement accuracy is achieved when the effective scattering surface (radar cross-section) of the transponder is equal to 2410σ m≥ . The calculations indicated that from among the transponders with such a high value of σ , which had to be operated under field conditions, the ATs were said to be optim ensions of the ATs are far smaller than those of the PTs, and their functional capabilities are greater. So, for the external SLAR calibration the corner reflectors were used, whereas for the SAR calibration the ATs were utilized.
The ATs as compared to the conventional transponders [168] were complemented with a ph
(Fig. 2.36.a) the phase modulator is realized as sequentially switched over variable-speed phase shifters with ,180,90 00 == ϕϕ 00 0,270 == ϕϕ in an effort to simulate the pseudo-Doppler spectrum offset in a re-reflected signal. This rendered it useful in checking the basic SAR ch nder that was operated with phase-modulated re-reflected signals allowed polarization measurements of the antenna pattern and an PHAA and PHAA side-lobe level; adjustment of the unit intended to measure the Doppler frequency center offset and the APhA beam position control system; checking of the onboard signal processing unit and evaluation of the SAR potential.
Fte

146 2.10
1. Wa L (23 сm) VHF (
TableThe basic characteristics of the calibrated reflectors
velength range Ka (0.8 сm) X (3 сm) 180сm)
2. Reflector type ve transponder Passive reflector Acti3. Antenna type Trihedral co
(а1=0.56 m, а =0.66 m)* H W
channel-type rners
2
orn–type ave
4. Operating frequency band 1- 2 8-40 GHz 2 GHz 0.165 ± 0.0МHz
5. Receive –and –transmit 12.5 antenna gain, dB
- - 10
6. Total active transponder gain, - - 41.6 dB
31
7. Reflector’s effective scattering ≈6700 (а1= 0.56m) ≈12800
(а
≈500 (а1=0.56m)
≈900 (а2 )
≈11100 ≈33200 cross section σ, 2m
2=0.66m) =0.66m
*а is the leng ofth the corner ref
The position of the AT against the ba f any terrain was readily deter n delay line ATs (see Fig. 2.36 b). Those
gnals corresponded to a series of pulses (shown on a radar image) spaced out at
le . ctor edge
ckground omined by the signals received from turned-o
sisec6µτ = , these pulses exhibiting a decrease in amplitude. The presence of time
reference points (and, hence, spatial points) also permitted of evaluating geometrical distortions in the acquired radio image.
addition to the AT, the SAR performance characteristics were tested by a passive delay-line transponder (see Fig.2.36 c). The above transponder was used to do preflight monitoring of the operating sta
In
tus of the SAR-23 antenna array elements. To this end, the
PT was alternately installed at some distance from the antenna array opposite each of the dipoles, whereas the SAR -23 internal calibration system was involved in switching the respective pairs of the receive-transmit channels. The passive transponder reflected backwards each pulse radiated through transmitting channel as a series of delayed pulses. The testing of the dipole operating condition was performed in terms of measuring the number of delayed pulses at the receiver output. The results from the “MARS” calibration measurements, which were conducted using the onground check-calibration module, are cited below.

147
Fig.2.37. The photo of active transponders in the process of calibration Descriptio
The calibration measuring area for proof-of-the principle testing of the “MARS” omplex was chosen on a farming land area of the Kharkov region (Ukraine). The active
0 meters on a vegetation-free harr
zed RCS field. A marked
n of Results from Testing of the "MARS" complex
cand passive transponders (see Table 2.10) were installed every 10
owed field, which made it easy to keep close watch on their operation against the background of the underlying surface. The RCS basic reference transponders were measured at different angles by a differential change in the flight path shifted every 5 kilometers. This procedure enabled making ultimate corrections to the normalized RCS determination algorithm and refining the antenna pattern configuration.
Fig. 2.38a shows an initial radar image acquired with a SLAR-3 under real conditions. Herein one can see a water storage reservoir, forests, farming land areas. Below are shown (Fig. 2.38.b) the images of the same areas as the normali
improvement of the image quality is accounted for by the total program–based compensation for all distortions on the initial radar imagery. The absolute NRCS values correspond to each image pixel. Using the technique described above to determine the RCS reference corners (see Table 2.10), the measurement accuracy of less than 0.5 dB was attained, a quite satisfactory recurrence of results being obtained over the entire observation angle range.

148
-40 dB 10 dB
Fig. 2.38. Unprocessed (a) and processed (b) images of the test array, acquired with SLAR -3 of the “MARS” complex
Fig. 2.39a presents an enlarged fragment of the processed image shown in Fig.
2.38 b and its vertical “column 1” (see Fig. 2.39b) and horizontal “line 1” cross-section reduced to the scale of the normalized RCS values. The determined normalized RCS of ploughed (1 and 3) and corn (2) fields are in good agreement with the known values already reported in the literature [60]. The arrows also indicates the responses from reference transponders 1 and 2 whose RCS are normalized to a value of . 0S
Fig. 2.40 shows the SAR-23 calibration results against the microwave-delay-line active transponder (see Fig. 2.36 b) that was operated in the mode of response to each received radar pulse by a series of pulses decreasing according the known law, i.e. the pulses shaped by a delay line. It should be noted that whenever one is encountered with real conditions when the AT is placed in close proximity to an object under study (i.e. the particular surface), it is often quite a challenge to find that type of underlying surface which could yield an “AT / surface background” ratio sufficient to obtain an adequate estimate of the AT RCS . Therefore, in practice the values were measured on mutually orthogonal polarizations (SAR - VH or HV and AT - HV or VH respectively) with a view of further decreasing the influence of the surface background. Fig. 2.40а presents the radar image acquired during this particular experiment. The SAR-23, as it was approaching the AT service zone, was switched from the VV surface sensing mode (i. e.
ATσ ATσ

149
radiation and reception in vertical polarization) over to the VH mode. Under these conditions the AT was in active operation on corresponding orthogonal polarizations. As will be apparent from comparing the signal amplitude recordings in the radar image line to the SAR operating in the VV mode (see Fig 2.40 b) and in the VH mode (see Fig. 2.40 c), the suppression of the surface background was quite efficient under a selected measuring regime. In this context it should be added that a comparison between the law of AT pulse amplitude decay (according to the radar data) and that of amplitude decay on a microwave delay line in terms of the onground test data (see curves 1 and 2 respectively, Fig. 2.40d) made it possible to estimate the TGC configuration of the SAR -23 receiver.
Fig. 2.39 A fragment of the radar image of the test array (a) vertical (column 1) (b) and
horizontal (line 1) (c)

150
Fig.2.40. Calibration against the L-band active transponder operating in the mode of response to each received radar pulse by a series of pulses produced by a microwave delay line. a - radar image fragment; b, c - radar image lines shown by arrows “b” and “c” respectively; d - evaluation of the receiver TGC configuration in terms of external calibration data; 1 - the law of the AT pulse amplitude decay in terms of radar data; 2 - the law of pulse amplitude decay at the microwave delay line output in terms of onground testing data
To check the “MARS” metrological parameters the value of for different
types of surfaces were estimated in the surveying modes at with different intervals between external calibrations. By way of illustration, the angular dependences of were shown in solid curves (see Fig. 2.41) for different types of surfaces at L-band. These curves were constructed according to the surveying extracted by the SAR-23 of the “MARS” complex on the afore-mentioned testing area in the Kharkov region, where the calibration
0σ
)(σ0 θf=
measurements were carried out (27.08.92) and allowed one to collect the data on forest

151
arable land, water storage reservoirs. In addition, the ice reconnaissance data were collected in the Arctic Ocean, especially in the first-year ice area (07.02.90). As seen from Fig 2.41, the experimental data and the literature data [66,69,96,174] on the study of forests, arable land, water resources and the first-year ice are within the SAR-23 measuring accuracy. For comparison (see the dotted line), the results obtained by other authors are cited. As evident from Fig. 2.41, curves 4 are worthy of notice. The estimated values of 0σ for the first–year sea ice are given in terms of the data on the SAR external calibratio during the flight missions that were accomplished from Murmansk to the North Pole. As for the last external calibration, it had been previously performed against the active transponders on a testing array near Kharkov (Ukraine). It was found that the data [67] obtained with the scatterometer (used as a conventional device to measure scattering parameters) are in fairly good agreement with the data from ice reconnaissance operations. All this is indicative of the fact that the equipment operational capability is highly stable and that the “MARS” external calibration system is meant to attain a measuring accuracy for the time exceeding the duration of a single flight mission (T > hours).
n
Fig. 2.41. The angular dependence of for different types of the earth 0σsurface at L-band ( cm23≈λ ). The da obtained experimentally and the data reported in othe 1- deciduous forest, orchard (HH polarization [174]); 2 - ploughed land (HH polarization [96]); 3 - fresh water (VV polarization [69]); 4 - the first-year sea ice (VV polarization [66,69])
tar papers.

152 §2.5 The distinctive features of on-line data processing aboard the satellite-based
SLR of the “Cosmos-1500” type and airborne multifrequency radar complex “MARS”
Radar imagery (RI) which is similar to optical photographs is a normal way of
displaying output data provided by the radar–based systems of remote sensing of the Earth environment. The radar imagery informativeness is strongly dependent upon the spatial and radiometric resolution of the remote sensing system.
The radar system’s spatial resolution is capable of bringing out some details of imagery that holds information on spatial characteristics parameters of objects (i.e. their shape, area size). In terms of the specific purpose of the radar systems the parameters such as brightness and color of radar images furnish a certain amount of information on the properties of radio wave scattering by objects (active systems) or on their intrinsic radiation (passive systems). The number of distinguishable gradations of imagery brightness (different colors) is governed by the radar system’s radiometric resolving power (contrast-background sensitivity).
An essential imagery characteristic feature, which is in fact responsible for the remote sensing informative potential, is the area of a particular portion of the surface being sensed. It is determined by a radar swath width (i.e. by the number of resolution elements in an image line) as well as by the duration of a survey session (i.e. by the number of lines in an image frame).
An overriding goal of the remote sensing signal processing system is to improve spatial and radiometric resolution through the correlation processing techniques, using signal compression and initial radar data filtering procedures. This type of remotely sensed data handling is certain to greatly improve the informational quality of outgoing remote sensing data. The output data are converted to radar images that are utilized by users as an initial material for thematic interpretation (decoding).
By now an extensive use has been made of digital radar signal processing techniques that offer a series of advantages over the analog methods. In the general sense, the afore–mentioned techniques are primarily based upon the following main functions:
- entering and preparing the raw remotely sensed data arriving from the receive- transmit radar equipment outputs;
- generating the line-frame structure of radar imagery; - implementing the algorithms for increasing the space resolution
perpendicular to the flying vehicle track for sensing pulse compression systems;
- implementing the algorithms for enhancing the contrast–background sensitivity;
- calibration data processing; - compensating for radar imagery amplitude distortions; - compensating for imagery geometric distortions and geographical
referencing; - visualizing and archiving the outgoing remotely sensed data. The data input and preparation function is performed in the analog–to-digital
converter (ADC) and the buffer storage device (BSD) Here an analog output signal from a radar receiver is transformed to a digital one and stored in the BSD as a sequence of samples of the signal returned from the underlying surface. Thus, an initial line of the future image elements is generated according to the coordinate perpendicular to the spacecraft flight direction (i.e. across the swath).

153The function of generating the imagery line-frame structure is implemented in the
BSD through memorizing the sequence of initial lines making up a partial frame, which is subsequently processed to generate an image outgoing line.
The process of obtaining output remotely sensed data is divided into three principal stages (see Fig.2.42):
1) onboard initial radar data processing (on-board segment is involved); 2) downlinking the remotely sensed data from the orbit to the Earth (data transfer
radio line); 3) onground data processing and imaging procedure (onground segment).
Initial data
Data transfer radio line
Onground segment
Onboard segment
Imagery dispat-ched to a user
Fig.2.42. Radar Imaging Block Diagram The above-listed digital processing functions can be distributed among the
onboard and onground data handling stages in a different manner. This depends upon a particular purpose of the radar remote sensing facility, the rate at which the raw data arrive, their amount, technical feasibility of processing and transferring the incoming data.
For example, when addressing the issues associated with the need for on-line use of remotely sensed data by numerous users, one should make sure that any relevant information be transmitted via low–cost radio lines in the form of imagery to be prepared for thematic interpretation. In this context the onboard on-line data handling is particularly responsible for the imaging process. The onground processing segment is mainly focused on visualizing and archiving the remotely sensed data. This distribution of function finds its normal application in an EOS SLR of the "Cosmos-1500", “Ocean”, “SICH” series as well as in the multifrequency radar complex “MARS”.
If on–line onboard imaging is technically unfeasible, then the space- or airborne segment is called upon to enter the raw data and get them ready for downloading to the Earth via high-speed transfer radio lines. The rest of the imaging functions are taken up by the onground segment. Yet another feature is that a dedicated network of onground sites for receiving and processing high-speed streams of remotely sensed data need to be built so that these data might be effectively utilized on a real-time basis. The above data processing configuration is employed in spaceborne Earth observation synthetic–aperture radars (SAR) installed aboard the satellite-based systems like “Seasat”, “Shuttle”, “ERS”, Radarsat”, “ENVISAT”, etc. These systems offer a high spatial resolution which can hardly be provided by onboard processing facilities.
It is obvious that in developing the data processing systems in remote sensed radars it is necessary that the preliminary signal processing functions be implemented. These functions are to be operated according to a “rigorous” algorithm, to reduce the total remotely sensed data stream and to render the onboard equipment less sophisticated. The onground segment may then incorporate more complicated hardware/software–controlled facilities whose primary role is to produce radar imagery in terms of the “flexible” algorithms. This way of distributing the functional duties between the onboard and onground segments allows:

154 - keeping the cost on developing the systems for remote sensing of the Earth
environment to a minimum; - moderating the requirements for the data transfer line throughput ; - improving the efficiency of supplying the users with remote sensed data.
On some aspects of on-board processing of signals from the SLR of the “Cosmos -1500”, “Okean” and “SICH” EOS series
Early in the 80s of the XX–th century a great deal of engineering effort was made to design the SLR of the “Cosmos-1500” EOS type that could transmit radar images produced by the above space-based instrument. For this purpose the widespread standard VHF- (APT standard) and L-band radio lines were utilized to transmit the necessary satellite–derived optical information [171]. This enabled the users who in general made use of optical imagery to gain an easy access to the SLR of EOS “Cosmos-1500” information through a broad network of receiving centers.
The standard on-line remote sensed transfer channels have comparatively narrow operating frequency bands (2KHz in the VHF- band line (APT standard ) and 5KHz in the L-band line (HRPT standard ), which are matched to the optical data transfer rate provided by the EOS like NOAA, Meteor, etc. As the frequency band of received radar data (in the SLR of the “Cosmos-1500” series it equals ~ 400KHz) needs to be compressed and matched to the phototelegraph imaging format that had been widely used at receiving centers the real-time SLR outgoing signal processing system had to be incorporated aboard the satellite-based “Cosmos-1500” facility.
In addition, when designing this type of the SLR instrument a provision was made to integrate the SLR swaths with a multispectral scanning low-resolution device (MSU-M) and to display images produced by these devices on a single phototelegraph form.
Fig. 2.43 presents the block diagram of the onboard signal processing unit (SPU) that performs the following operations:
-using the ACD to transform the analog voltage from the radar output to a parallel 6-bit binary code; compensating for geometrical distortions using the synthesizer-generated controlling signals as the voltage is being transformed to a digital code;
-signal integration in the random-access memory (RAM); -transforming the digital code read out from the RAM to an analog voltage using a
digital-to-analog converter (DAC) in which the amplitude distortions are likewise compensated;
-combining the radar and optical images into a single line on a commutator to display them on a single photo telegraph form;
Combined images entered directly into the L-band transmission line or transmitted to a subcarrier frequency KHzFM 4.2= by an amplitude modulator so as to be relayed through a VHF-band transmission line. In addition to this, the SPU maintained the radar clocking regime using 100-Hz pulses). In a combined mode when the radar and the MSU-M were operated simultaneously, the SPU was synchronized by retrace pulses produced by the scanning device “MSU-M”. As the radar was operated on its own, the above pulses were generated in the SPU. The pulse frequency was 4Hz.
Now consider some aspects of the onboard radar signal processing and the transformation of these signals to the standard phototelegraph form.

155
MSU-M
SLR
ADC
RAM
DAC
DAC
DAC
SynthesizerSynchro-
nizer
To VHF- band
radio line
To L-band radio line
SPU
Fig.2.43 Block Diagram of the SPU installed on the SLR of the EOS “ Cosmos -1500” series
Linearization of SLR imagery in the direction transverse to flight
The radar image of the Earth surface was formed with the use of one of the coordinates, specifically slant range r which was definitively governed by the time of radio signal propagation up to a scattering element of the surface and backward. As the spherical surface with R, as a radius, was being viewed from the point an altitude of H above the surface, slant range r and the distance between the projection onto the surface of the SLR location point and the scattering element of surface d (tangential range ) were related to each other by the functional dependence [171]:
( )( ) ( )( )( )[ ]{ })(2/2arccossinarcsin 2 RHrHRHrRrRd +++= , (2.21)
where arcos ( ) θ=++++ )))(2/()2(( 2 RHHRHr is the Earth surface irradiation angle counted off from the nadir .
Clearly the extracted data have to be visually interpreted and subsequently processed by converting an acquired image to one of the map projection or to the rectangular coordinate system. Since at that time indispensable computing facilities were not made available to a broad network of users to allow linearizing the scale of images, it was worthwhile to perform this operation in the SPU aboard the EOS.
It is easy to show that the smooth function (2.21) can be fitted using piecewise-linear approximation with a relatively small number of linear sections. This approximation is adequate for solving most of the problems. In the SPU of the “Cosmos-1500” SLR the image scale was linearized, as an image line was being sequentially recorded in a digital accumulator. In this case the SLR swath (or the echo signal interrogation time) was broken down into six sections, whereas triggering sample
),,(/ HrRfd =

156 pulses were fed to the ADC controlling inputs. The pulse repetition period varied under the law specified by the relation d′ = f(R, r, H).
Listed in Table 2.11 are the data showing the fashion in which the elements were placed on the Earth surface at an Earth satellite flight altitude of H=650km. The placement of the elements was provided by the SPU sweep generator (SG).
As seen from Table 2.11, the value of δ,∆ was determined as:
estimatedfiniteinitialii dd ∆∆−∆=−=∆ + /)(100;1 δ , (2.22) where is the tangential range of -th surface element; i-1,2…n-1, n=570;
is the estimated value of the elements placement interval on the Earth surface.
id iKmestimote 8.0=∆
Table 2.11
Image line parameters to be implemented by the sweep generator. Placement parameter Number of section
1 2 3 4 5 6 Starting of section, km 258 293 343 421 512 608 End of section, km 293 343 421 512 608 713 Number of pixels on the section 44 66 98 110 122 130 Length of pixels, km: at the beginning of the section initial∆
0,837
0,811
0,869
0,881
0,817
0,851
at the end of the section finite∆ 0,754 0,717 0,749 0,778 0,745 0,790
Nonlinearity of a pixel δ, % 10,3 11,8 15 13 9 7,6 Strobe repetition period, secµ 2,26 2,43 2,95 3,47 3,64 4,17
Fig. 2.44 shows the interval ∆ of the elements placement on the Earth surface as a
function of the ordinal number of strobe i. The dotted line indicates the estimated value of the placement interval estimate∆
The block diagram of the sweep generator SG is shown in Fig.2.45. The key components of the SG are the counters (Cr) with a variable count factor, which are controlled via multiplexers (MUX) by the signals from the decoders (Dc) whose number is determined by the number of the segments of piecewise-linear approximation of relation (1). Decoders (Dec-1 – Dec-6) are responsible for the operational procedure of counter (Cr-1 acting as the strobe-pulse repetition generator. Dec-7 – Dec-12 are intended to control the operation Cr-2 that generates the number of sample pulses on the swath sections. Dec-13 specifies the number of the above sections. The data on the constants recorded in the decoders are listed in Table 2.12.
Table 2.12
Number decoder
1
2
3
4
5
6
7
8
9
10
11
12
13
Value of the constant 13
14
17
20
21
24
44
66
98 110 122 131
7

157
∆,km
200 600 400 i
0.9
0.8
0.7
Fig.2.44. The variations in the interval of the elements placement on the Earth surface as a function of the ordinal number i of a strobe pulse. The dotted line points to the estimated value of the elements placement interval

158
Fig.2.45. Block diagram of the sweep generator (SG) and time delay
generator (TDG)
When the devices described above are in the initial state the code “000” is sent to the controlling inputs of multiplexers 1and 2 (Mux-1 and Mux-2). The “disabled” signals are fed to the counter, control inputs at the counters. As the "SG enabled” state signal arrives, the counters Gr-1 - Cr-3 are unlocked and the control inputs of counters Cr-1 and Cr-2 get hooked up to decoders “ Dec-1 and Dec-7 respectively. Just at that time the generation of the strobes of the first section commences. As the production of the last pulse of the section is terminated, the control code at Cr-3 outputs increases by one, and the multiplexer's then hook up to the following decoders to the inputs of Cr-1 and Cr-2. After the last pulse in a pulse packet has been generated the code "111" is established at information outputs of Cr-3. The signal "stop" generated by decoder Dec-13 blocks the operation of Cr-1 - Cr-3 (they go on to the zero state) through control trigger Tr-1 prior to the arrival of the next "SG enabled” state signal. The SG operation is synchronized using the pulses whose frequency is 5.76 MHz.

159To ensure that the “Cosmos-1500” SLR receive–transmit channel was adequately
calibrated some part of the transmitter-radiated microwave power was tapped off and arrived at the receiver input via a delay line. The transformation of the calibration signal strength magnitude to a digital code was controlled by the strobe pulse with a 15.6 secµ delay relative to the transmitter trigger pulse.
The digital code of the calibration signal was recorded into the initial 30 cells of the RAM. The information on the underlying surface was written into the next 570 RAM cells. Control of the initial strobe pulse delay
Now consider the transformation of the “Cosmos-1500” EOS SLR swath as a function of the Earth satellite altitude. The slant range r up to the scattering surface element being viewed at an angle of θ from nadir is defined by the relation:
[ ] )2(cos)(cos)( 2 HRHRHRHr +−+−+= θθ , (2.23)
whereas the distance between the EOS path projection onto the Earth surface and the observable surface element (see Fig. 2.21) is given as:
)/sinarcsin( RrRd θ= (2.24)
Fig. 2.46 shows that the position of the near and far edges of the afore–mentioned swath (shown by solid lines) changed with the Earth satellite altitude varying between 600 and 700 Km in terms of the strobes spacing as described above. As is seen from the Fig. below, the variation in H gave rise to a dramatic change of the viewing zone. At the same time one could observe not only the changes in the scale of an image to be produced, but also an increase of geometrical distortions, especially in that part which was in the near edge of the swatch. All the above effects added complexity to the on-line thematic image processing.
d,km
706560
75
50
25
H,km
Fig. 2.46. Variations in the near (lower curves) and far (upper curves) edges of the “Cosmos-1500” SLR swath ”d” as a function of the Earth satellite altitude “H”. In this way a method is presented for stabilizing both the minimal slant range (solid line) and the 0robservation angle 0θ of the near edge of the swath (dotted line)

160 The viewing zone position could be effectively stabilized through the consistent
angular position 0θ of the near edge of the swath and the length of the strobe pulse packet
rather than a minimal value of slant range . As indicated in [35], the ocean surface
inhomogeneities revealed the most contrasting features at incidence angles of . Therefore in the “Cosmos -1500” SLR an initial incidence angle was taken to be equal to
. The position of the observation zone boundaries that corresponded to the indicated way of arranging the zone of vision is shown in Fig. 2.46 (dotted line). We can say with reasonable confidence that in this context the swath width and, consequently, the image scale became stabilized.
0r020>θ
00 5.21=θ
The angular position of the near boundary of the viewing zone in the SPU was stabilized when the variable delay of the initial strobe pocket position was inserted into the synthesizer. The initial delay was controlled by the commands from the Earth in terms of the predicted EOS altitude above the Earth region to be explored.
The time delay generator (TDG ) assigned not only the time interval 0τ in each sensing pulse repetition rate which determined the spatial position of the first element of the Earth surface image, but also the change in this interval with a prescribed step 0τ∆ by the commands from the external command device (ECD) as a 4-bit binary code.
The TDG block diagram is illustrated in Fig 2.45. The TDG basic component are the initial delay generator – counter Cr-4, a current delay generator – Cr-5, a code comparator (CC) and a storage device (SD) for the current strobe delay code.
The TDG operation in its initial state is blocked by the signal generated by control trigger Tr-2. The TDG is actuated by the transmitter enabling pulse that recurs at
. At the same time the counter Cr-4 is turned on. Within 4376 HzFn 100= secµ a signal is generated enabling the counter Cr-5 to go into operation and the signal is allowed to pass from the code comparator to a signal generator (SG) ("enabled SG" state). The division coefficient of the counter Cr-5 is selected in such a way that at its information outputs the code undergoes variations within a period of 44.2 .secµ If the output code of Cr-5 is coincident with the code held in the storage device (SD), then "enabled SG" signal is generated at the TDG output.
The initial delay sec43760 µτ = corresponded to the slant range up to the
surface point that was observable at by an EOS altitude of 606 km. The delay
variation step
00 5.21=θ
sec2.440 µτ =∆ allowed the slant range to change up to the near edge of
the swath with an altitude increasing by KmH 6=∆ . Table 2.13 presents not only the values of and (slant range and tangential
range respectively) calculated by (2.22), (2.23), for which the condition of is satisfied at different altitudes (H) of the carrier, but also the corresponding delay values
0r 0d0
0 5.21=θ
0τ of the first data strobe. As will he apparent from the data cited above, the TDG stabilizes the initial
viewing angle when the EOS altitude varied between 606 and 697 Km. The
tangential range up the near edge of the SLR swath tended to vary from 240 to 277 km .
00 5.21=θ
0d

161
Table 2.13
Estimated range and echo-signal delay for the EOS “ Cosmos -1500” SLR №
of step ECD code
sec,0 µτ kmr ,0
H, km kmd ,0
1 2 3 4 5 6 0 0000 4376.0 656.4 606.2 240.6 1 0001 4420.2 663.0 612.3 243.0 2 0010 4464.4 669.7 618.3 245.5 3 0011 4508.6 676.3 624.4 247.9 4 0100 4552.8 682.9 630.5 250.4 5 0101 4597.0 689.6 636.6 252.8 6 0110 4611.2 696.2 642.6 255.2 7 0111 4685.4 702.8 648.7 257.7 8 1000 4729.6 709.4 654.8 260.1 9 1001 4773.8 716.1 660.8 262.5
10 1010 4818.0 722.7 666.9 265.0 11 1011 4862.2 729.3 673.0 267.4 12 1100 4906.4 736.0 679.0 269.8 13 1101 4950.6 742.6 685.1 272.2 14 1110 4994.8 749.2 691.2 274.7 15 1111 5039.0 755.9 697.2 277.1
Signal filtering
As discussed above, the “Cosmos-1500” SLR used electronic pixel imaging in a direction transverse to the swath width by strobing a returned signal. The data transfer rate was considerably higher than the one universally adopted in phototelegraphy. This resulted in getting radar signals stored up and, as a consequence, it was easier to observe the typical elements of the surface being sensed.
To increase the probability of detecting the extended low-contrast inhomogeneities of the Earth surface, the commonly accepted practice was to employ low-frequency returned-signal filtering which would allow reducing the interference noise dispersion caused by the scattered signal phase fluctuations, as the sensing complex was moving relative to the surface under study. In fact, at the filter output the dispersion of signal
was defined as: rD
∫= br
FdFFSD
0)( (2.25)
where is the cutoff frequency of the low-pass filter; S(F) is the spectrum of the signal at the filter output. As far as the scanning systems (or side-looking systems) are concerned, the filtering process should proceed in each resolution element regardless of the along-the-line scanning technology. Different methods could be possibly utilized to implement pixel-by-pixel filtering. In the EOS “Cosmos-1500” SLR signal processing unit the RAM was used in combination with an arithmetic device-integrator to ensure pixel-by-pixel storing of N realizations of a received signal. This enables the fluctuation dispersion to be reduced by 101gN. As the fluctuation dispersion decreased, an increase in N gave rise to the
bF

162 degradation of the along-the-flight track resolution. In [175] an expression was derived for an optimal number of N0 realizations being stored. This expression indicated that an amount of per unit time information would be maximal:
VfN Ra /10 δ+= , (2.26)
where aδ - is the along-the-flight track resolution;
- the sensing pulse recurrence rate; Rf V - is the SLR movement speed.
In the SLR SPU was selected the value N=8, which allowed the fluctuation dispersion to be reduced by 9 dB. In approximating the SLR antenna pattern by a rectangular, the resolving power degradation in the swath mid-section would be 25% for the carrier altitude of 650 km.
On the structure of output signals generated in the SPU. Upon accumulating eight realizations of Earth surface-scattered signals, the RAM
carried some information of a single radio image line and in this case provision was made to produce the radar image in the SPU using three modes in which the relevant information was read out and transmitted via radio lines.
Under the first operating mode, after the back swing pulse (BSP) had been fed into the SPU from the low-resolution multizonal scanning device (MSU-M), a certain amount of radar information was read out at a frequency of 12.8 KHz. This information that passed through the DAC was transformed to an analog signal and entered the commutator that relayed it further to the L-band transfer line or via a modulator to the M-transfer line (see Fig. 2.43). On completing the radar signal read-out from the RAM, the optical information coming in from the MSU–M entered the radio line via the same commutator. After arrival of the next BSP, the cycle repeated itself. Thus, the combined radar and optical imagery could be produced in a single frame. In this particular mode the SLR data were transmitted during 46.9 secµ (including the calibration wedge transmission time), whereas the optical information transfer took 84.7 secµ .
In the second and third mode, only some radar information was transferred. In the second operating mode, the data read-out time from the RAM was 93.8 secµ at a frequency of 6.4 KHz and in the third mode it is equal to 156.2 secµ at a frequency of 3.84 kHz. These entire operating modes were introduced into the SPU to render the radar images relayed through a VHF–bond transmission line more informative.
Radiometric correction of SLR imagery in a swath. When the radar system is in operation, the intensity of received varies with
the range to an object: recP
(2.27) )(σ03 θ−≈ rPrec
where is the normalized RCS as a function of incidence angle )(σ0 θ θ , and as θ
increases, the value of tends to decrease. 0δFor a small magnitude of variation in a slant range in the “Cosmos-1500” SLR, it
was possible to replace a nonlinear correction with a linear one. The SPU envisages several operating mode in which the transfer coefficient might vary from the beginning to the end

163of the line: ;7.11 =K ;5.42 =K ,8.63 =K the initial transfer coefficient
being established irrespective of the correction factor to be utilized. 10 =KThe correction factor neutralized the variations in the , as the slant range
changed in the limits of the swath, whereas and partially compensated the
dependent . To change the transfer factor of the intermediate frequency (LF) channel the radar systems used time-varied gain control (TGC). In the SPU the correcting device (TGC) was placed in the output signal generation channel (this device was connected to the DAC information output). As a result, the requirements for the high-speed mode of its circuit were substantially lowered. The correction device multiplied the analog DAC output signal x(t) by the weighting function of the form
1K recP
2K 3K)(σ0 θ
),()( 0 tKKty i+= the function y(t) being generated digitally. Therefore, there was no need for switching over time–specifying circuits, as the data readout rate varied. Owing to this, the device arrangement was simplified and the correction accuracy improved.
The block diagram of the corrector is shown in Fig 2.47. The key component of the corrector is a divider with a variable division factor. This divider is built around the resistive matrix R-2R. In contrast to the conventional DAC circuits, the matrix resistors are connected through commutator Cm1 to the input information bus, rather than to the source of stabilized voltage.
The variation in the transmission transfer coefficient of the SLR signal processing chain was ensured through the synchronous recording of data readout from the RAM and due to the changes in the division factor of matrix R-2R. With a length of the information line of n elements, the value of the correction factor was defined as:
µµ /)( n+=Κ (2.28) where µ is the constant proportional to the matrix’s transmission factor at the beginning of a line.
Fig.2.47. The corrector block diagram

164 Below we present the values of constants µ needed to obtain the correction factor
at n = 570:
Correction factor 7.11 =K 5.42 =K 8.63 =K Value of the constant 814 163 98
The control signal fed from the ECD (external control device) got the corrector
ready to be operated using a selected correction factor. The control unit (CU) generated the binary code of constant µ corresponding to a required correction factor. Upon receiving the initial setting signal the code of constant µ was recorded in counter Cr that controls the operation of commutator Cm1. As a result, an initial transmission transfer coefficient of the corrector was generated. As the “enable” signal arrived, the counter Cr then started forming the weighting function y(t) that corresponded to a chosen correction regimen by counting the number of signal pulses , i.e. by counting the number of information signal pixels. After the last information pixel had been read out by an “initial setting” signal, the counter Cr and the entire corrector circuit were getting prepared for data readout operations in the next line.
readF
The gain of the scaling amplifier (SA) was changed by switching resistor R2-R4 using commutator Cm2 in the feedback circuit. An inversely proportional variation in the transfer factor of matrix R-2R made it possible to obtain a single transmission coefficient of the information signal generation chain at the beginning of a line in all correction modes. Characteristic features of onboard signals processing aboard the EOS SLR "SICH-M".
As indicated above, the basic SLR image parameters were the swath width, the number of space sampling pixels, fluctuation dispersion and dynamic brightness range. These parameters were taken to be optimal (as applied to the “Cosmos-1500” SLR signal processing) in terms of fast-speed operation power consumption and weight–overall dimensions of computer facilities that had already came into use just at the time the work on designing this equipment was in progress.
The state–of-the-art computer technology was found to be efficient in considerably improving the information-bearing SLR imagery produced by the SLR aboard the spaceborne “SICH -1M” system due to some complication of the algorithm of onboard processing signals and more efficient use of the existing potential of the transmitter-receiver equipment.
The thematic SLR image processing technology had been in use for more than 20 years, and it was just over that period of time that the data provided by the SPU of the SLR of “Cosmos-1500” type revealed a number of shortcomings which in fact made it difficult to determine the RCS values of the underlying surface and the geographical referencing of imagery thus acquired.
In designing and developing the SLR of the "SICH-1M" spacecraft the SPU components were retrofitted in an effort to do away with the above limitations and to upgrade the output data quality.
The updates that were made to improve the SPU operation allowed one to adopt the following additional radar imaging procedures:
- using a refined algorithm for processing signals and radar imaging for downlink of the data to the Earth via two digital radio transmission lines (both of the latter operating at 8.2 and 1.7 GHz respectively) and the parallel downlink through an analog transmission

165radio line (the APT standard radio line at 137MHz). In this particular operating mode the radar imagery produced by the SLR operating in a broadened swath, an extended brightness range and showing a higher degree of detail, which had existed in the earlier version of the "Cosmos-1500", was transmitted via digital radio lines;
- signal processing and radar imaging characterized by parallel downlink via a 137 MHz analog transmission radio line using the time interval transformation method. In this mode the SLR images were transmitted via an analog radio line through a buffer storage device, which was set to convert the image line frequency ranging between 4 and 2 Hz while retaining the SLR spatial across-the-swath resolution.
After the SPU components the “SICH -1M” spacecraft had been updated, all the previously existing modes, in which the remotely sensed data were generated and downlinked by the satellite–based “Cosmos”, “Okean” and “SICH” systems, also remained practically unchanged. On the updated image parameters.
The procedure of modernizing the onboard signal processing equipment in additional SLR operating modes resulted in the changes of the following radar image parameters: - the SLR swath width extended from 450 to 700 km, as the number of sample to be processed in a line across the width had increased up to 1200; - radar image details became more pronounced due to an increase in the frequency of ADC strobes and that of radar image lines up to 8Hz; - the SPU input dynamic range was extended from 36 to 48 dB due to an increase in ADC and processor digital capacity; - the number of storaged samples of returned signals was increased from 8 to 12 for digital radio lines and up to 48 for the analog radio line.
In addition, as far as these modes were concerned, the nonuniform placement of ADC strobes along the slant range was replaced by an uniform one (the compensation for onboard geometrical distortions was precluded). At the same time the compensation for the SLR across-the-swath brightness was likewise ruled out. All these imaging processing were to be implemented by the onground processing segment.
On some peculiar features of analog-to-digital conversion of a received radar signal.
In order to extend the dynamic range of the signal processing unit (SPU) the ADC capacity was to be augmented from 6 to 10 binary digits. This allowed the SLR SPU input dynamic range to be extended from 36 to 60 dB, which signified that if the SLR receiving channel was not provided with the automatic gain control (AGC) system, then the quantizing noise and the noise of the DAC limitation had to be kept to a minimum. In this case where the SLR additional operating modes were available, the across-track radar image (RI) scale linearization was carried from the onboard processing segment over to the onground segment. Considering this particular situation, a change was made of strobe pulse placement in range from a nonuniform to a uniform one. As a result, the possibilities of the IR geometrical distortions caused by the existing onboard SLR processing equipment were ruled out. In addition, real-time onground compensation for these distortions was extremely complicated, especially in the standard small-size receiving stations of the APT channel. In order to obtain a 750-km swath, the required number of points (ADC strobe pulses) in a range line should be equal to 1200.
Table 2.14 presents the data on the surveying geometry in the SLR additional mode including the Earth surface curvature for an altitude of 650 km. The SLR across- track discretization step depending upon the incidence angle xL θ was calculated from the

166
formula: θsin/5.0 ADCx TCL ⋅⋅= , where is velocity of light; sec/103 8 mC ⋅= θ is the angle of radio wave incidence with due account of the Earth surface curvature;
sec7.2 µ=ADCT is the ADC strobe pulse repetition rate. The instability of the SLR transmitter turn-on delay time and the inaccuracy in
setting a calibration strobe for a maximum of the calibration pulse amplitude are known to result in a greater error in determining the absolute RCS values of objects to be sensed. These errors were caused by the fluctuations of the SLR calibration signal. To eliminate the possibility of amplitude distortions caused by "floating" of the ADC calibration strobe within the calibration pulse length and to give a comprehensive description of the SLR calibration signal shape with the aim of digitizing that particular signal, use was made of 8 calibration strobes whose recurrence rate was 1 MHz.
Table 2.14 Parameter
Parameter value
Number of points in a RI line 1200 Swath width, km 750 Initial incidence angle, degree 20 Finite incidence angle, degree 53,6 Minimum slant range, km 697 Maximum slant range, km 1225 Radar image sampling step in the across-flight track at the near edge of the swath, m
1282
Radar image sampling step in the across-flight track at the far edge of the swath, m
548
Incidence angle at the near edge of the swath, degree
22
Incidence angle at the far edge of the swath, degree 63,5
In parallel with digitization of the calibration signal returned from the underlying
surface, the receiver noise was digitized to improve accuracy in determining the RCS small values. For this purpose, 8 additional ADC strobes were utilized, which were placed in delay time relative to a sensing pulse over the interval in which there were no Earth-echoes signal and spurious "leakages" of the transmitter's sensing and calibration signals.
On the signal accumulation in the SLR additional operating modes.
As indicated above, in order to enhance the SLR contrast-background sensitivity in the old SPU variant a method for accumulating signals returned from the surface to be sense was employed. Accumulation was performed using a jumping window of 8 sensing pulses in width with a window shift by 25 pulses. In this case most of the sensing pulses were skipped and not involved in accumulating signals. As a result, the SLR transmitter power was not fully utilized. Moreover, as this type of accumulation took place, it was no longer possible to enhance the contrast-background sensitivity. At the same time additional quantization noise arose due to an incoherent description of a SPU output signal.
An optimal width of the accumulating window in terms of the criterion for enhancing the contrast-background sensitivity and minimizing the spatial resolution
0N

167impairment is defined by expression (2.26). Here the value of aδ is the along-track SLR
resolution (1600 and 2850 meters respectively at the near and far edges of the swath); is
the sensing pulse repetition rate (100 Hz); is the carrier speed (6800 m/sec). rF
carVThe optimal width of the accumulating window as estimated for the SLR is 24 and
43 samples respectively at the near and far edges of the swath. To give a correct description of the processed output SPU signal obtained in the
SLR flight direction the radar image sampling step equal to the half of the element pattern resolution was selected. In this case the RI line frequency calculated from
ycarline VF δ/2 ⋅= is 8.5 Hz. It is known that signal processing with the use of weighting windows allows the
digital filter performance characteristics to be considerably improved. Using the weighting (nonuniform) window in the signal accumulation procedure as compared to a rectangular (uniform) window is conducive to extending the low-pass filter passband and reducing the side-lobe level. The filter passband extension increased the signal fluctuation dispersion at the SPU output, whereas the reduction of the side-lobe level led to a decrease in radar image sampling noise. The Hamming window is optimal in terms of the criterion for broadening the filter passband (i.e. by a factor of 3.1≅ with respect to a rectangular window) and diminishing the side-lobe level (on the order of – 43 dB relative to a peak value of gain-frequency characteristic).
Based upon the above-cited estimates and taking account of the transmitter's sensing pulse frequency and RI image sampling ratios and using the weighting window in the accumulator as well as the protocol of the data exchange with radio lines, the following equipment parameters were chosen:
- sensing pulse repetition rate HzFr 96= ;
- line frequency at the accumulator output HzF digline 8. = for digital radio lines;
- line frequency at the accumulator output HzF anline 4. = for analog radio lines;
- accumulator window width 16.0 =digN samples for digital radio lines;
- accumulator window width 32.0 =anN samples for analog radio lines. Physically, the algorithm for along-track radar signal accumulation in the SLR
additional modes was split into 3 modules: - main-accumulator module (MAM) meant to generate a digital radio line radar
image; - module of the first additional accumulator (MAA-1) generating a RI to be
transferred via an analog radio line with a line frequency of 2 Hz; - module of the second additional accumulator (MAA-2) generating a RI to be
transferred via an analog radio line with a line frequency of 4 Hz; In the MAM the along-track SLR signal accumulation was performed by a sliding
weighting window. In this case the width of the accumulating window was 16 lines (sensing pulses) whereas the shift of window was equal to 12 lines. The specified window shift provided for the accumulator's output line repetition frequency of 8Hz. The type of the window weighting function was the Hamming function (elevated cosine). The Hamming window width with 16 line size was equal to a width of uniform window with 12 line size.
The operation of along-flight track filtration in the MAM is carried out for 1200 samples of a returned signal. The data from MAM output arrive at the MAA-1 and at the digital radio lines inputs.

168 The calibration signal samples and the receiver's noise samples were processed in
the MAM in parallel with the samples of the Earth surface-returned signal in keeping with the general algorithm.
After the radar data had been processed in the MAM, they were normalized and, being presented in the 8-bit format, and transferred to the module for digital radio line preparation.
The radar imagery was processed in the MAA-1 to reduce the SPU output data flow. To this end, pixel-by-pixel summation of two adjacent RI lines produced at the MAM output was performed and the line frequency was simultaneously reduced from 8 Hz to 4 Hz. The number of pixel in a line remained unchanged as before, i.e. it was equal to 1200.
The calibration signal samples and the receiver noise samples were processed in the MAA-1 in parallel with the samples of the signal returned from the Earth surface in keeping with general algorithm.
The data from the MAA-1 arrived at the MAA-2 and at the input of the buffer storage device so as to be transferred via an analog radio line in a two-line mode.
Subsequent imagery processing in the MAA-2 reduces the data flow at the SPU output to a required magnitude, as the data were transferred via an analog radio line in a four-line mode. The data flow could be decreased through additional summation of two adjacent RI samples in range with a further decrease in the number of sample in a line from 1200 down to 600 by a decimation method. The calibration samples were not subjected to filtering and range compression procedure in the MAA-2.
The data from the MAA-2 output entered the radio line input to be immediately transferred or dispatched to a long-term storage device so that they could be stored and subsequently downlinked to the onground data reception points. Radar image spatial resolution in the SLR additional operating modes.
Now consider the effect of signal accumulation in the SPU upon the resolution of the SLR additional operating modes.
The accumulation effect upon the SLR along-flight track spatial resolution will be assessed through the technique for simulating the responses of a single point target (corner reflector) prior to and after the signal processing in the SPU.
During the flight of the above-mentioned target located on a weakly reflecting surface, the target response at the output of the SLR amplitude detector will make it possible to unambiguously describe the antenna pattern configuration in squared voltage. This response can be approximated with a sufficient degree of accuracy in the fixed interval of time using an expression given below:
,))/)2/(2/()/)2/(2(sin()( 2nNinNiiG −−= (2.29)
where i=1,2,3…N is the number of the SLR transmitter sensing pulse on the observation interval; N is the number (odd) of the SLR transmitter sensing pulse on the observation interval; n is the pattern width in the azimuthal plane with level 0.707, which is expressed in terms of the number SLR-radiated pulses during the flight for distance equal to the pattern width.
The output signal , following the along-track accumulation in the MAM, is expressed as:
)(iY
∑=
+⋅=windowN
ji jiGAKiY
1
)()( , (2-30)

169where are the weighting coefficients of the window function; iA
j is the number of the weighting coefficient in a window;
windowN is the number of samples being accumulated in a window
( 16=windowN ); K is the normalizing coefficient.
The Hamming window weighting coefficients was calculated from the following formula:
( )( )windowwindowi NNjA /2/2cos46.054.0 −⋅+= π
When sensing from an altitude of 650 km, the subsattelite point on the Earth
surface was shifted by 70 meters over a span of time between the adjacent SLR sensing pulses. For the half-power beamwidth of 0.0023 rad, the size of the area being sensed along the flight track will be 1603 m at the near edge of the swath, 2246 m in the middle of the swath and 2889 m at its far edge. The size of the pattern spot on the Earth surface, which is expressed in the terms of the number n of samples (i.e. those of sensing pulses) along the flight track, will be 23, 32 and 41 respectively.
Fig.2.48 shows amplitude-normalized responses of signals at the SPU input (1), at the MAM output (2) and at the MAA-1 output (3) depending upon the number of sensing pulse i. These responses were calculated from the afore-cited formulas for the near-swath edge (n = 23). Curve 1 describes the shape of the radar antenna pattern prior to the signal accumulation procedure in the SPU. Curve 2 points to the antenna pattern variation following the signal passage through a low-frequency filter made up by a sliding weighting window whose size equals 16 samples (processing accomplished in the MAM). Curve 3 was plotted as a result of additional sliding averaging of additional sliding averaging of two samples taken, once they had been filtered by the weighting window and spaced out for an interval equaling 12 samples with respect to one another (processing is done in the MAA-1)
As the examination of the results suggested, the beam resolution was not considerably deteriorated following the signal processing in the MAM and the MAA-1 at the near edge of the swath. The antenna pattern spot size on the Earth surface increased from 23 to 25 pulses at the MAM output whereas at the MAA-1 output it came up to 27 sensing pulses. On the Earth surface it was equivalent to the pattern spot broadening by 140 and 280 m or by 8.7% and 17.4%.
The results from estimating the antenna pattern spot at far edge of the swath indicated that these parameters would be 70 and 140 m or 2.5% and 5% respectively. Hence, it follows that, given the specified surveying and signal processing parameters, the impact of the accumulation upon the spatial resolution was insignificant and decreased from the near swath edge to the far one both in absolute magnitude and relative units.
In Fig.2.48 the graphs are given in the form of samples without decimation. In fact, as a result of decimation, each 12-th in sequence-order sample will be present at the MAM output whereas each 24-th sample of the sample sequence will be present at MAA-1 output. For example, for the МAM there are the samples denoted by the figures on a horizontal axis. For the MAA-1 the samples denoted by figures are taken through one. As seen from the graph, two output MAM samples or a single output MAA-1 sample will certainly fall upon the antenna pattern up-to-date level 0.707.

170
Fig.2.48. Amplitude-normalized responses of signals at the SPU input (1), at the MAM (2) and MAA-1 (3) outputs as a function of the sensing pulse number i
The SLR swath across-track resolution was determined by the transmitter sensing
pulse length and was equal to 1282 m at the near edge of the swath and 548 m at its far edge. In the course of data processing in the MAM and MAA-1 the range accumulations were not carried out. Thus the SLR pulse spatial resolution remained unchanged.
While the data were processed in the MAA-2, additional summation with decimation of two adjacent ranges was performed to provide for matching to the data flow in an analog radio line. Consequently, with radar imagery being transmitted via the analog radio line in a 4-line mode, the size of the element of the radar image across-track resolution bin showed a two-fold increase and was equal to 2654 and 1096 m at the near and far swath edges.
Evaluating the minimal detectable normalized radar cross section (NRCS).
The evaluation of the SLR-detected minimum NRCS was made through comparing the SLR performance characteristics prior to and after the SLR updating procedure. For this purpose the factors governing the SLR operating capabilities were determined following the radar equipment updates. As evident from the examination of the radar range formula [132], the SLR potential is strongly dependent upon the following factors:
- an increase in range at the swath edge; - an increase in the area of the surface irradiation spot; - variation of the antenna gain at the maximum observation angle; - an increase in the number of the accumulated signals returned from the underlying surface. According to the SLR specification, the minimal detectable NRCS should be no
more than – 20 . The minimal detectable NRSC for the updated SLR can be calculated from the following formula:
2/ mdB
areaaccumAPrange GGLLdB −−++−= 20)(NRCSmin , (2.31)

171where are the losses of the potential resulting from an increase in the slant range;
are the losses of the potential due to a decrease in the antenna gain at the incidence
angle at the far edge of the swath, as the latter is being extended; is the added
potential resulting from an increased number of accumulated samples; is the added potential resulting from an increased area of a surface element being irradiated as the observation angle increases.
rangeL
APL
accumG
areaG
The losses of the potential caused by an extended range with a swath getting broadened are calculated using the formula given below:
)/log(10)( 31
32 RRdBLrange ⋅= (2.32)
Here and kmR 3.9881 = kmR 12252 = in accordance with a distance from the antenna
up to the far edge of the swath 450 km and 750 km. The estimated value of for the above distances is 2.8 dB.
rangeL
As the swath broadened, the incidence angle of the far swath edge increased from to . The change in the maximum incidence angle will give rise to a decrease
of the SLR potential in the swath due to the drift of the antenna pattern maximum, which was directed at an incidence angle of to the left of the flight path into the zone of a steeper antenna pattern slope. These losses were partially neutralized by a magnitude of the observation angle in the plane perpendicular to the spacecraft flight path away from nadir. At the same time the SLR potential decreased slightly at the near swath edge and this was regarded as a useful factor when the SLR was operated with no amplitude range signal correction.
°8.45 °6.53
°35
Now let us estimate the losses caused by an increase in the observation angle as the swath was being extended with no additional turn of the antenna axis and with its additional turn from its axis by away from nadir. For this purpose we will make use of the SLR antenna pattern measurement data. The antenna pattern measurements in the plane perpendicular to that of the flight path are listed in Table 2.15.
APL
°5
If there is no antenna turn, the losses in the direction of the far swath edge for angles of and will be 2.5 dB (see in Table 2.15 a difference in the power levels at angles of and from the antenna pattern peak value). If the antenna is turned by with respect to the standard position of the "Cosmos-1500" EOS type, the losses fall to 1.3 dB (the difference in the power levels at angles of and ). In this case the power level at the near swath edge is reduced by 1.5 dB (the difference in the power levels at angles of and ).
APL°45 °55
°10 °20°5
APL °5 °15
°15 °20The SLR added potential, which was obtained from an increased number of
accumulated noncorrelated signal in the additional SLR modes (as compared to the SLR normal operating modes), are calculated from the following formula:
accumG
( ) 2/18/log10)( equivaccum NdBG ⋅= , (2.33)

172
where is the number of radar signals accumulated in the SPU. This number is reduced to the rectangular window.
equivN
The equivalent number of the accumulated samples was determined by the formula:
equivN
36.1/weightaddAzaddRequiv NNNN ⋅⋅= , (2.34)
where is the weighting accumulator window width; are number of additional accumulations in range and azimuth prior to the data output to the 137 MHz analog radio link.
weightN addAzaddR NN ,
Table 2.15
Angle relative to antenna
pattern maximum, deg.
Power level in the antenna relative to the antenna pattern maximum in the receive-transmit mode, dB
0 0,0 ±5 -0,2 ±10 -0,5 ±15 -1,5 ±20 -3,0 ±25 -5,5 ±30 -10,5 ±35 -18,5 ±40 -29,0 ±45 -40,5 ±50 -45,0
For the additional SLR operating modes, the number of accumulated
samples , as radar images are transmitted via digital and analog radio links, is equal to 12, 24 and 48. Accordingly, the gain in accumulation will be 0.9 dB, 2.4 dB and 3.9 dB.
equivN
In estimating the SLR potential one should allow for , which is attributed to the change in the area of a reflecting surface element. This factor is calculated using the following formula:
areaG
( ) ( ){ }2112 sin/sinlog10)( θθ RRdBGarea ⋅⋅= , (2.35)
where °= 8.451θ and °= 6.532θ are the finite observation angles for the 450 km and 750 km swaths respectively.
For prescribed values of angles and ranges an increase in reflecting spot area will lead to an added potential on the order of ~ 0.4 dB. areaG

173The results obtained from estimating the minimal detectable NRSC in the SLR
additional modes are listed in Table 2.16.
Table 2.16. Parameter Digital
radio link Analog
radio link (4-line format)
Analog radio link
(2-line format) For the old processing variant
Finite observation angle, deg. 45,5 Slant range, max., km 988,3 Number of accumulated samples 8 Minimal NRSC at a S/N ratio of 1, dB
-20 For the new processing variant with no additional antenna rotation
Losses resulting from an increased range, dB
2,8
Losses resulting from an antenna pattern, dB
2,5
Equivalent number of SLR accumulation samples
12
48
24
Added potential due to accumulation, dB
0,9
3,9
2,4
Added potential due to an increase in the reflecting element area, dB
0,4
Minimal NRSC at a S/N ratio 1, dB -16,0 -19,0 -17,5 For a new processing variant with additional antenna turning by 5 deg.
Antenna pattern losses, dB 1,3 Minimal NRSC at a S/N ratio 1, dB -17,2 -20,2 -18,7
Features of data transmitting to the Earth for the SLR operating in additional modes.
When the SLR facility was operated under additional operating conditions, the remote sensed data were relayed via two 1.7 GHz - and 8.5 GHz-digital and 137 MHz-analog radio links.
To ensure the record/play back mode and allow the data to be transferred via the analog radio link using the time-interval transformation method with a 10-min duration of surveying session, the SPU was provided with a 3-MB long-term storage device.
The DAC capacity was equal to 8 bits at the radio link modulator input. This provided for the SPU output dynamic range on the order of 48 dB.
In the SLR additional modes, the best use was made of the line capacity to enable the radar image transmission. To this end, as the data were relayed via the analog radio link from the output line the phasing signal field was eliminated and replaced with an initial line marker which consisted of the fields for transmitting the white and black level. The remaining line field was allocated for radar image samples transmission, calibration and SLR noise receiver samples.
The SPU output data in the SLR additional modes were transmitted line-by-line via analog radio links in one of the possible four- or two-line format.
The structure of the analog radio link is shown in Fig.2.49. In the analog radio link line the following data transfer fields are envisaged:

174 - field 1 for transferring the line beginning marker 9.8± 0.2 ms; - field 2 for transferring the calibration signal 6.0±0.1 ms; - field 3 for transferring the receiver noise 6.0±0.1 ms; - field 4 for transferring a radar image 225.6±0.2 ms (451.2±0.2 ms in a two-line
mode).
1 2 3 4 1 2 3 4
t
Fig.2.49. The structure of the analog radio link line The SPU output data were transmitted in the SLR additional mode via the digital
radio links (line-by-line) in a united format for both of radio links with the following parameters:
- line frequency - 4 Hz; - number of elements in a line - 2500; - single sample representation capacity - 8 bits. The digital radio link line structure is shown in Fig.2.50. In the above line the
following data transfer fields are envisaged: - field 1 for transferring the line beginning marker and official information - 12
bytes; - field 2 for transferring SLR calibration - 8 bytes; - field 3 for transmitting SLR receiver noise – 32 bytes; - field 4 for transmitting SLR samples - 1200 bytes; - field 5 of a pause - 8 bytes.
1 2 3 4 5 2 3 4 5 1 2 3 4
t
Fig.2.50. The structure of a digital radio link line
Features of the airborne multifrequency radar complex "MARS" onboard radar data processing system.
In designing the complex "MARS" signal processing system particular attention was given to optimizing and evaluation test of the radar facilities and remote sensing procedures, to tackling research issues pertinent to radar-based studies into the environment over a wide radio wave range as well as to practical problem of piloting vessels in the Arctic ice and environmental monitoring. This broad range of the above issues had motivated the development of a rather complicated structure, multifunctionality and flexibility of the onboard remotely sensed data handling system using the radar facility like the afore-mentioned airborne complex "MARS". The onboard data processing system encompassed the entire spectrum of functions involving the processing of primary radar

175signals, radar imaging, recording of remotely sensed data and their displaying and ,eventually, certain functions of thematic processing of remotely sensed data (specifically, compilation of ice reconnaissance maps aboard an airplane and their transmittion to ice-breaking vessels).
The "MARS" data processing system (Fig.2.51) comprised five working places of: chief operator; Ka-band SLAR operator; X-band SLAR operator; L-band SAR operator; VHF-band operator; data recording operator.
The chief operator was in charge of controlling the surveying process, selecting modes and the visual control of the remotely sensed data quality. To control the data quality two black-and-white half-tone monitors M1 and M2 were used, on which the matched radar images produced by 4 radars were displayed in the "rolling mode" on a real-time basis. The first monitor displayed Ka- and X-band images, the second displayed L- and VHF-band images. The monitor videosignals were generated in a videoprocessor (VP). The digitized image data were fed to the VP from outputs of the corresponding signal processing units operating at Ka-, X-, L- and VHF-bands.
The "MARS" operating mode was controlled by the chief operator using the special controls installed on the control and synchronization unit (CSU), where the control signals of the transmitter sensing pulse triggering are generated. All the four radars were operated in synchronism with the same pulse recurrence rate. This enabled one to eliminate a reciprocal influence of high-power transmitter interferences upon the operation of radar receiving facilities. To keep the radar image scale constant along the flight track the sensing pulse recurrence rate varied depending upon the aircraft flight speed.
In the CSU the strobe pulse packets were generated for the ADCs as integral parts of the SPUs simultaneously with the transmitter trigger pulses. The ADC pulse strobe recurrence rate and the number of these strobes in the packet helped determine the radar image sampling step perpendicular to the aircraft flight direction and the swath width respectively. In order to compensate of the radar imagery irregularities scale across the swath (resulting from its geometry) the strobe frequency in packet varied under the appropriate law and this maintained a uniform radar imagery scale (geometric correction) in a direction perpendicular to the flight path. The law of variation in the ADC strobe pulse recurrence rate was set as a function of the flight altitude and the initial observation angle.
The SLAR initial incidence angle is known to be dependent upon the time delay between the moment of sensing radiation and the first ADC strobe in a strobe pulse packet. This delay was determined by the slant range to a target, a radio wave propagation velocity and instrumental signal delays in a receive-transmit radar chain. When a required initial observation angle was set by an operator, the CSU generated the ADC strobe packets with regard to the instrumental delays in each of the four radars. In this way the near swath edges of all the "MARS" radars were matched.
The videoprocessor function was to receive radar imagery in a digital form from the outputs of the SPUs, to store data in the RAM and to generate an analog TV signal of the line-frame structure for the radar images to be displayed on monitor screens. The data produced in the VP were accumulated and updated in a line-by-line mode at a sensing pace. Thus, a moving object effect could be produced. The monitor screens displayed four-frequency radar imagery of a scene over which an aircraft was flying at a given moment. In response to an operator's command one could implement the "still frame" display function. As a result, the images of the scene being explored remained "frozen" on the monitor. In this case it was possible to ensure a two-fold increase of the "frozen" images.

176
М1
М2
VP
CSU
Radar transmitter triggering
Ka-band SLAR peratorworkplace
's
М3
Ka-band SPU
X-band SLARoperator's workplace
М4
X-band SPU
L-band SAR operator's workplace
М5
VHF-band SARoperator's workplace
М6
VHF-band SPU
From VHF- band SAR receiver
L-band SPUFrom L-band
SAR receiver
From X-band SLAR receiver
From Ka-band SLAR receiver
М7
PC
HDD
АМ1
АМ2
HRU
V
ideo
sign
al
Analog radar imagery
Recording operator's workplace регистра
G
PS n
avig
atio
n da
ta
Dig
ital r
adar
imag
ery
In
itial
SA
R d
ata
Chief operator's workplace
Fig.2.51. Block diagram of the "MARS" processing system

177The workplaces of the operators who took care of the afore-mentioned SLARs and
SARs were also fitted with digital SPUs operating at Ka-, X-, L- and VHF-bands as well as with black-and-white monitors M3, M4, M5 and M6.
The functions of the Ka- and X-band SPUs were to process the SLARs and to produce digital and analog radar imagery to be displayed on monitors and archived on magnetic carriers.
The functions of L- and VHF-band SPUs were to provide unfocused processing of the SAR signals. The above SPUs were used to process digital and analog radar imagery to be on-line displayed and recorded and to get the initial radar signals ready for hologram recordings.
Even though the SPUs were operated at the above 4 frequency bands simultaneously, they could also ensure that incoming data were independently synchronized, visualized and recorded. In this type of an operating mode the surveying parameters were prescribed by a radar operator directly from his workplace.
All the processing units were designed and realized around discrete components using integral TTL, TTLS and ECL microcircuit technology. Just at a time when the "MARS" facility was well under development it was impossible to make use of already existing processor microcircuit complete sets, because their operation was not too fast.
The typical applications of the SPUs consisted in: - providing for the digital input of signals from the outputs receive-transmit radar
equipment and getting the row data arrays ready for their subsequent processing; - enhancing the contrast-background and image sensitivity using the technique for
incoherent signal accumulation along the flight; - processing the calibration data; - generating the radar imagery line-frame structure. Apart from the afore-mentioned functions, the L- and VHF-band SPUs were also
involved in enhancing the radar's spatial along-track resolution using the unfocused antenna aperture synthesizing method.
The function of enhancing the spatial along-track resolution (i.e. generating and compressing the chirp pulses) in L- and VHF-band SARs was implemented by an analog procedure in the receive-transmit chain using dispersive delay lines.
Besides, the SAR SPUs acted as the means of generating digital radioholograms which were used for the subsequent onground data handling to process high-resolution imagery. With this aim in mind, the initial radar signals were subjected to filtering and compression in a preliminary digital low-frequency filter. The frequency responses of the prefilters in L- and VHF-band SPUs reduced the stream of output radioholograms down to the values that were matched to the recording rate of the data recorders. At the same time they permitted the L- and VHF-band images to be synthesized at 7 and 15-m spatial resolutions respectively.
The operator's workplace was equipped with the devices to make digital and analog recording of remotely sensed data. Radar imagery was digitally recorded by means of a personal computer (PC) and it was thus possible for the radar images to be recorded on a real-time replaceable hard-disk driver (HDD). These images were displayed on the screen of monitor M7. The digitally recorded images were complemented with the data on the time, speed, flight track, actual geographic coordinates. These data were coming in from the GPS receiver.
In parallel with digital recordings, the images were recorded on a magnetic tape in analog form by means of a multichannel magnetograph (AM1).
The initial digital SAR data from the L- and VHF- band SPUs outputs entered the hologram recording unit (HRU) that was meant to generate radioholograms to be recorded on the magnetograph (AM2).

178 In the HRU the digital data from the L- and VHF- band SPUs were complemented
with calibration data and converted to analog signals with a goal of augmenting the data recording density on a magnetic tape. The quadrature components of a receive signals and a synchrosignal were concurrently taped. The synchrosignal was utilized in preparing radioholograms that were to be processed by the onground facilities.
In addition to the major processing units shown in Fig.2.51, the laboratory aircraft "MARS" was outfitted with ancillary computing facilities for secondary imagery processing as well as with recording and data transfer devices.

179 CHAPTER 3. ON-LINE RADAR REMOTELY SENSED AEROSPACE
MONITORING OF THE WORLD OCEAN §3.1 Monitoring of hazardous processes in the ocean-air system
In this day and age one can hardly find anyone who is not aware of the self-evident truth that the processes and all kinds of phenomena that originate and proceed in the ocean-air system are of paramount importance for humankind round the world. In this context we are inevitably faced with an acute need for reliable, real-time hydrometeorological data and essential pieces of information on the sea surface state. The overriding reason for this is to secure safe, economically sound navigation, to make most of marine living and mineral resources, deep-water mining on littoral shelves and finally to monitor the marine environment, let alone more important operations. Many industries require that they be provided with long-term weather forecasts that cannot be appropriately made without exploring the atmospheric conditions and taking into account the energy transfer between the ambient atmosphere and the ocean on global scales.
The real-time observations of the sea surface processes are conventionally made using a variety of optical systems operating in visible and IR regions. Specifically, these systems are referred to as MSS, TM, ETM+, CERES, MODIS, Sea WIFS, etc. They are capable of extracting and promptly transferring to users a large body of information on the state of the upper layers of atmospheric upper cloud cover whereas a large amount of on-line data on the ocean surface state is relatively small. This is governed by the atmospheric clouds, illumination conditions, etc. The optical systems are normally used to reveal on the sea surface the choppy zones, currents, suspension spots and contaminations. A number of indirect techniques have been elaborated to determine the average speeds of winds and their direction in the near-sea surface layer [176].
A most promising tool for remote sensing of the ocean is an active radar technique based (as it was examined in more detail in Chapter 1) upon determining the signals scattered by a rough ocean surface. Recall once again that in the case of X-band waves the rough ocean surface scatterers are the ripple waves whose spectral density is directly dependent upon the near-surface wind speed V. In fact, this implies that the RCS value of σ0 measured by the X-band radar remote sensing system is likewise wind speed-dependent. Since the high ocean waves offer a more pronounced anisotropy and the ripple-scattered signals are modulated by the slopes of those waves, the maximum difference in the levels of return signals reveals itself in radar illumination of the choppy ocean surface opposite to the big-wave front (also in a wake) and at right angles to it. Basically use of the RCS (σ0) dependences upon the near-sea surface wind speed V and the direction in which the high waves move along (ϕ) makes it possible to determine the near-sea surface wind vector [157,177-179].
In contrast to remote sensing optical systems, the spaceborne radars open up a wide scope for on-line global surveillance of the ocean surface state irrespective of illumination conditions. At the same time unlike in-situ weather forecasting facilities (above all, ground-based and ship-borne weather stations and sea buoys to boot) the above systems provide the data featured by a high spatial density, and this is really helpful in terms of studying and monitoring the parameters of both synoptic and mesoscale processes and all kinds of phenomena. The special-purpose investigations suggested that widely spaced-out chains of weather observation stations and appreciable errors resulting from the synoptic data are one of the main reasons why the quality of the forecasts is so poor, especially for a short-range period of more than two days. In terms of allowing for a great error in onground data, the zones of large pressure and wind field gradients as well as the low-pressure region position are determined [179]. Yet another important point should be

180 made: the wind field in the mesoscale region. It is also noted that the wind field in the mesoscale region characterized by the highly variable time-and space-distributed details is poorly understood and therefore it should be explored. With the shipborne measurements being available, it is impossible to predict a particular type of this distribution. We can only restrict our discussion to describing the statistical distribution properties and apply the statistical approach to interpreting the data from shipborne wind measurements.
A valuable source of information on the near-sea surface wind field can be provided by radar remote measurements. The initial example of using the space-borne radars for remote sensing of the sea roughness (or the near-sea surface wind) was supplied by the experiments performed by the SEASAT facility. The radar scatterometer of onboard that satellite had been relaying the data on the near-sea surface wind (averaged over the 20 x 70 km2 areas) throughout a 3-month period. However, an extremely high magnitude of the averaging area tended to smooth out the spatial roughness field gradients and that factor made it impossible to detect the details of this field whose inherent dimensions were smaller than a resolution bin.
The present chapter will examine the possibilities for on-line radar monitoring of hazardous processes in the ocean-air system using (as an example) the data from the spaceborne SLRs of the "Cosmos-1500"/ "Okean"/ "SICH-1" EOS and airborne remote sensing systems referred to as "Analog" and "MARS". It should be pointed out that this type of SLR had been designed and developed in line with a special task set by the Navy Department of the USSR and Goskomgidromet of the USSR to resolve two primary issues, namely, to be able to promptly determine the sea surface wind parameters globally and to ensure on-line strategic ice monitoring. The SLR informative potential is held to be tremendous, because its parameters (a wide swath of order 450 km, average space resolution of 0.8 x 1.4 km2, a high contrast-background sensitivity and on-line processing and transmission of data to an unlimited range of users) were selected so effectively as to be adequate for as many specific remote sensing needs as possible. This type of the SLR was the first-ever "home made" spaceborne real-time mode remote sensing radar and it has been demonstrating its high operational performance for more than 25 years now. As a result, it has yielded a formidable amount of data on hazardous synoptic and mesoscale processes that occur in the ocean-air system. Moreover, the SLR's were always interconnected with the hardware systems of the afore-mentioned EOS and operated in synchrony with conventional optical wide-viewing systems (MSU-M). This arrangement made it considerably easier for numerous optical application specialists to utilize the data it produced.
The airborne "Analog" and "MARS" complexes have also been in successful operation over many years wherever they were needed to deal with practical issues and study the active atmospheric processes over the sea surface (in most cases, mesoscale ones).
Now let us call your attention to several features of the most active atmospheric processes, which, as they reach the genesis stage and builds up their "strength" over the ocean surface, do have a dramatic effect of specifying weather conditions, heavy rainfalls, high sea state, floods, mud torrents, landslides, etc. We should, above all else, keep in mind the phenomena like tropical, extratropical and polar cyclones as well as related atmospheric fronts, storms and squalls zones. Cyclones. A continually time-and space-varying synoptic wind field over the oceanic expanses is dependent upon large-scale baric systems, i.e. anticyclones and cyclones. The extent of cyclones over the ocean is, on average, more than 1000 km. The diameters of deep frontal cyclones come up to several thousands of kilometers. The vastest and deepest cyclones are observed to occur in the North Atlantic Ocean in the Davis Strait area, across

181 Iceland and in the North Pacific region stretching from Kamchatka to Alaska. In southern Hemisphere the cyclones appear to prevail in the zone of 55º to 65º S.L. The average speed of travelling cyclones ranges between 30 and 40 km/h. But in the case of newly young cyclones it may occasionally exceed 80 km/h. Typically, the cyclones are generated in the most baroclynic tropospheric zones, i.e. in the polar and arctic fronts, thereby entrapping the divided air masses. The frontal cyclone formation includes a series of development stages such as the wave, young cyclone, developed, occluding, occluded and the cyclone being filled up. The structure cloud systems, which correspond to these stages, are described in [180-181]. A comparison of numerous optical, radar images of cyclones to the in-situ meteorological data is made in [171]. As the developing cyclones reach the stage at which the wave disturbance tends to emerge, one can see that sharply defined parameters of atmospheric fronts – a horizontal temperature contrast and a wind shear are not always present. So delineating the fronts on the synoptic map using onground measurements appear to be a rather challenging task.
Fig.3.1 shows the radar (right-side) and optical (left-side) images of the Atlantic Ocean area south and south-east to the island of Newfoundland. These images were acquired from the "Cosmos-1500" EOS. In the radar image the stationary atmospheric front is observed. The front processes of active cyclogenesis as a frontal wave (1) and a frontal zone bend (2) are shown. As evident from the radar image, a substantial growth in the near-sea surface wind speed up to 15-17 m/sec is also observed within the limits of the frontal wave zone. All these formations cannot be virtually seen in the optical image. At the same time it is really difficult to ascertain the precise position of the front itself.
Again we should stress that using synchronous radar and optical images does not simply imply matching the data from two self-contained remote sensing facilities. This procedure carries a profound physical meaning. The radar X-band data enable one to evaluate the intensity at which the energy from atmosphere to ocean is transferred. In other words, the intensity of a scattered radio signal is directly related to the spectral density of short ocean waves (ripples). In fact, the ripples are generated by the action of the near-sea surface wind, i.e. when the immediate air-to-ocean energy transfer is effected.
The energy produced by the short-wave portion of the ocean rough waves (ripple) spectrum is thereafter transferred to longer-wave components of this particular spectrum. At the same time the cloud formation is indicative of condensed air moisture evaporated from the ocean surface, i.e. the optical information suggests that the ocean-to-air energy transfer does take place. That is to say, the simultaneous application of both radar and optical data allows the energy exchange between ocean and atmosphere to be adequately monitored.
Yet another storm feature is noted: the further development of the frontal zone is certain to bring forth a young cyclone. Due to a persistent drop in a cyclone pressure the eddy motion (in a violent swirl of air masses) results in a subsequent wave front deformation and emergence of a particularly pronounced heated sector carrying warm and cold fronts. The cold advection spreads to a somewhat larger portion of the cyclone, because the cold front travels faster than the warm one. The satellite-produced optical images show that the anticyclone curvature of cloud band appears to be more discernible at the top of the wave.

182
Fig. 3.1. Radar (right-side) and optical (left-side) images of the Atlantic Ocean area south and south-east to the island of Newfoundland. 1 - frontal wave on the steady-state atmospheric front, active cyclogenesis zone; 2 – frontal zone bend

183 Now consider the specific features of the near-sea surface and cloud cover fields in
young polar cyclones whose swirl-like formations may vary from tens to several (500-600) kilometers. Their prediction is quite a challenging job, because their size is rather small and the rate of their development is high. Over the last few years a good deal of attention has been focused on these cyclonic eddies that are formed in polar air masses. These mesoscale weather systems are most frequently observed in the winter-time over the North Atlantic, the North of the Pacific Oceans and the arctic seas. In terms of configurations, the cloud covers of developed polar cyclones look very much like a comma or a spiral. As the polar cyclones move further along, the wind speed close to the ocean surface tends to increase up to 30 ms-1 and more, and whenever their rapid development and fast movement add to their intensity, the navigation may become rather precarious and pose a great threat to ocean-going ships. The polar cyclones are generally attended with heavy precipitation, which presents serious problems, as it reaches the coastline and then moves over land, particularly in winter when it is really difficult to spot it in good time by means of spaceborne optical facilities. The polar cyclones reach the status in an incremental process and get intensified more often than not, and whenever they travel southward they are bound to predetermine weather conditions across the vast territories of Scandinavia, the European part of Russia and even of Ukraine.
Fig.3.2. illustrates two radar images of swiftly developing young polar cyclone. The images were acquired by the spaceborne "Cosmos-1500" SLR several days apart. No optical images were given, because the radar surveying operations were performed during the polar night and the cloud cover was not visible. As will be seen from Fig.3.2a, the radar image shows that in the Norwegian Sea, close to the ice sheet, a young polar cyclone is in its initial formation phase, the near-sea surface wind inside it does not exceed 12 to 15 m/sec (according to the SLR data). Its size varies between 80 and 100 km. However, it is just in this early phase that the typical vortex pattern of this cyclone is especially pronounced much in the same way as its structural elements: specifically, a small-size, calm, windless area in the centre and the atmospheric fronts. The same polar cyclone also occurs (see Fig 3.2b) south-west of the Spitsbergen. Its size is seen to have increased up to 300 km, whereas the wind speed is as high as 17 to 20 km/sec. The zones of violently intensified wind and mesoscale ordered structures shown as bands and cells are sharply defined.
The onset of cyclone occlusion is typically coincident with an instant of its initial development. The cold advection, as it gets weakened, spreads to engulf a large portion of the cyclone while the warm advection is noted in its front part. The process of pushing the warm air into the upper layers and onto the cyclone periphery is referred to as occlusion. As it commences, the cloud spirals of the atmospheric fronts are linked up and the cloud occlusion system is thus formed. The cloud spiral of the occlusion front become elongated and smoothly gives away to the cloud spiral of the cold front. The clouds of the warm front are partially absorbed by the occlusion front and partially smeared.
Shown in Fig.3.3 are the radar and optical images of the occluded cyclone above the Okhotsk Sea [182]. In the optical image a cloud spiral is clearly discernible, which is originated from the small-size cloudless space at centre 1. The radar image illustrates the central zone 1, whose area measuring around 20 x 25 km, is shifted nearly 25 km north ward, which is clearly evidenced by the southward-inclined axis. According to some estimates, zone 1 appears dark, the wind speed inside it was less than 5 m/sec, and this is in good agreement with shipborne data. Dark patch 1 is surrounded by a brighter horseshoe-shaped cloud where the wind speed V ≅ 7 to 10 m/sec. In the optical image this area is featured by the dazzling white cumulus clouds. Still further away from the centre the wind speed tends to decrease once again. In the radar image V ≅ 4 ÷ 5 m/sec is seen in zone 3.

184
а b Fig.3.2. Radar images of the young polar cyclone: а) the initial incipience phase in the Norwegian Sea close to the ice sheet, the near-sea surface wind inside it (a according to the SLR data) does not exceed 12 to 15 m/sec. Its size varies between 80–100 km. A spin-like structure of this cyclone and its constituent elements are pronounced: a small-size calm area in the centre and the atmospheric fronts; b) the same cyclone is observed south-west of the Spitsbergen. Its size has grown up to 300 km and the wind speed is between 17 and 20 m/sec

185
а b
Fig.3.3. Satellite images of the occluded cyclone above the Okhotsk Sea. They were supplied by the spaceborne "Cosmos-1500" complex. а) radar image; b) optical image of the visible range

186 Part of this area as shown in the optical picture is marked off by stratus clouds 3 with a slightly elevated upper boundary interspersed with separate thicker cumulus-shaped elements. No disturbances occur in the sea surface wind field; even at a boundary of cloud-free area 4 and cloud cover 3 the values V remain unchanged. In contrast to this, there is an internal boundary of cloud spiral 5 along with the zone of a drastic increase wind speed. Strong winds (V ≥ 15 to 20 m/sec) occur not only within dense, bright and high clouds 5, but also encapsulate a wider zone southward and westward of the cyclone center.
A remarkable feature of the radar image is the sector-like structure in the distribution of the sea surface wind speed: if in region 6 - V ≥ 20 m/sec, then in sector 7- 12 to 15 m/sec, whereas in zone 8 it ranges between 6 and 10 m/sec. The optical image presents those banks of clouds that correspond to the sectors boundaries. Presumably these banks bring out the position of secondary cold fronts formed due to the influx of cold air portions into the northern part of the cyclone.
In the northern part of sectors 7 and 8 the radar image brightness field exhibits a certain degree of inhomogeneity, i.e. the mesoscale patterns are seen to arise in those areas of the optical image where the cumulus-shaped elements can be observed. Here the wind speed variations lie between 3 and 10 m/sec. Atmospheric Fronts. The cyclone activity and frontgenesis over the North Atlantic and Pacific Ocean regions are typically shown to be more severe over the fall-winter period. It may well be that on frequent occasions any atmospheric front in close proximity to the sea surface is difficult to spot with a high accuracy using the already analyzed satellite optical images and synoptic data. However, the information on atmospheric front, their intensity and the velocity at which they travel is of vital importance for different applications especially when there is an urgent need to ensure that navigation operations are reliable and safe. As the atmospheric fronts, particularly the cold ones, pass across some areas, the wind gets appreciably stiff, its direction tends to vary, heavy precipitation follows and visibility deteriorates. An increase of the baric gradients in the narrow frontal zones is caused not only by a rapidly changing pressure in the frontal region, but also by contrasting temperatures, as the warm and cold air masses are coming into contact [183]. Since the ocean observation stations are spaced out at large distances from one another, it is seems next to impossible to estimate the magnitudes of baric gradients and, consequently, the wind speeds in the frontal zones to a sufficient accuracy. Therefore, this problem may well be tackled by using the remotely sensed data from space. For instance, the distribution of the near-sea surface wind and clouds in the cold front being displaced along with occlusion front is seen in Fig.3.4, where radar (a) and optical (b) images of the North Atlantic area are illustrated. They were acquired by the satellite-based "Cosmos-1500" SLR. In the cloud zone, where the cyclonic curvature is more pronounced, the cumulus-shaped elements are predominant. Under these conditions the front line close to the earth surface runs near to the rearward edge of a cloud band [181]. In the radar image a narrow (5 to 10 km) bright strip 1 beyond which a strong wind of 17 to 20 m/sec (zone 2) corresponds to the front line. The extension of this strip is a dark, wider (30 to 40 km) zone 3 featuring the low wind speed of V < 7 to 10 m/sec. It indicates the position of the occlusion front. Between the northern extremity of strip 1 and the calm zone 3 the wind speed varies rather smoothly. Yet another narrow zone 4, where the wind speed increases up to 20-25 m/sec, is located parallel to the cold front stretching within 150 to 170 km ahead of it. This is exactly a squall-prone zone, which in fact poses a great threat to navigation, because it is just inside this particular zone that the wind speed drastically varies from 5-7 m/sec.

187
а b
Fig.3.4. Radar (а) and optical (b) images of the North Atlantic acquired by the satellite-based "Cosmos-1500" SLR

188 Mesoscale convective cells, banks of clouds and vortices.
Examination of numerous radar images of the ocean surface, which were produced by the "Cosmos-1500" SLR, strongly suggests that the mesoscale inhomogeneous signatures (measuring between a few units and several tens of kilometers) were originally detected from the intensity of ocean surface-scattered radio signals (i.e. in the near-sea surface wind). They were found to be of quasi-ordered nature [184]. A comparison to the optical images that were concurrently obtained indicated that typically these inhomogeneities in radar images had been correlated with the convective mesoscale banks of clouds and cells. According to some comprehensive pieces of information cited in the relevant literature we think it fit to give a brief outline of those facts that allow us to adequately interpret satellite radar images. Fig. 3.5 presents radar and optical images acquired by the "Cosmos-1500" space-based radar platform. These images illustrate the mesoscale convective cells of different dimensions.
The mesoscale convective cells and banks of clouds are bound to arise in a relatively thin, unsteadily stratified boundary layer over the ocean. Therefore, the mere fact that they persist over a certain area of the sea or ocean expanses suggests that the lower atmosphere is unsteadily stratified [181].
The two-dimensional convection process contributes towards forming the banks of clouds (or "the cloud streets"). Within the banks in question an average thickness of the convective layer ∆Η is around 2-3 km, whereas the wavelength D (the cloud band plus cloud-free space) shows a wide-ranging value between less than 1 km and 20 to 30 km. An increase in the convective layer thickness (this process occurs, as the cold air currents travel over the warm ocean surface) is followed by a growing distance among cloud banks. The distance between the cloud banks varies between 20 to 500 km or over. The cloud bank formation is accompanied by an increase of the wind speed close to the Earth's surface. Examination of simultaneous satellite and ground observation data indicated that the wind speed near to the surface grows, as the length of cloud banks and spacing between them increases [185]. For example, with a wavelength of D < 20 km and the extent of cloud banks L < 200 km, the mean value V is 8 to 9 m/sec, and at D ≈ 20 to 50 km and L > 700 km this value reaches 12 to 24 m/sec. In the cloud banks located in the rearward part of the cyclonic vortex, the value V is higher by 7 to 12 m/sec. In the cloud bank (roll-type) convection the wind direction varies slightly with height. Therefore the convective (cloud) banks serve as an excellent indicator of the wind direction in the boundary layers of the atmosphere.
According to the data given in [186], the particles in the cloud banks move around in spirals whose horizontal axes are oriented relative to the main stream. The sense of rotation in the adjacent cloud banks is opposite. The spatial variations in the longitudinal wind speed component within a separate spiral branch amount up to extreme values in the stretches of ascending and descending motions. The air flow acceleration is generally governed by the descending stretches of a spiral while its deceleration is due to the ascending ones.
Yet another widespread example of ordered spatial structures both in the field of cloud banks and in that of a radar image of the ocean surface is provided by the mesoscale convective cells (MCC) showing that Benard-Rayleigh cell convection is actually involved in the above processes. These cells are horizontally extended with D = 5 to 100 km and observed as open and closed circulating systems. In the open cells the downward motions and a cloud- free space are attached to their centre, whereas the upward ones and the clouds appear to run towards the periphery with the closed cells having an opposite circulation. The thickness of a convective layer where the cells are being formed is 1-2 km, and a degree of their flatness, δ=D/∆H, is 5 to 50, which is, on average, by an order of magnitude greater than in conventional Benard cells.

189
а b
Fig.3.5. Radar (left) and optical (right) images of the system of mesoscale convective cells having different dimension: а) 20 to 70 km; b) 5 to 20 km
The convective cells can be divided into 2 types [187,188] depending upon the
nature of process occurring in a boundary layer. Type 1 embraces the MCC resulting from cold air inflows. The cells (in most
cases, the open ones) are generated over the warm oceanic currents, as the cold air moves eastward away from the continents. The cloud formation is brought about by the air being heated up and the moisture coming in from below. Initially the cumulus clouds prevail, and later they do not appear as sustaining as can be and eventually they are transformed to stratus-cumulus clouds, when they start spreading beneath the inversion layer. This process can persist for several days, which is a normal thing just after an extratropical cyclone has passed off.
Type II is pertinent to the MCC that are associated with influence of the stratus-cumulus cloud cover over the sea. Typically, these are the closed convective cells that are generated over the cooler areas of the ocean, strictly to the west of the continents. In this case the energy source of vertical mixing is the radiative cooling of cloud top crests. In that event the heat flows at the ocean-air boundary are rather weak.
The MCC are found to be worldwide in their distribution. According to E. Agee [187] they can be spotted at any moment over one or another area of the planet. The map containing the data on the primary location of the MCC zones over the World Ocean

190 expanses [187] and supplemented with the "Cosmos-1500" SLR data [171] is shown in Fig. 3.6.
Fig.3.6. The primary location of mesoscale convective formations above the defined areas of Ocean waters [171,187]. 1 – open cells; 2 – warm currents; 3 – closed cells; 4 – cold currents
The challenges posed by the experimental studies into the ordered convection over
the ocean surface are self-evident. In terms of interpreting the variations in the brightness of satellite radar images, the data on the wind speed variability are of most considerable interest. According to the data given in [185], the average wind speed over the Pacific Ocean was 8.6 m/sec for the case of closed cells, 14.3 m/sec for the open ones, and when the cells develop a sickle-like shape, the wind speed is 17.6 m/sec.
The remotely sensed data provide some information on the 1-st type of the MCC which result from the cold air influx. As the cold air starts intruding near the eastern coast of the mainland (or at the edge of an ice sheet), a cloud-free space is formed, which is quite discernible in satellite optical images. The contours of the cloud-free zone retrace the shape of the coastline or an ice near-edge zone. The cloud-free zone breadth varies with the wind speed, atmospheric moisture, differences in air and water temperatures and is actually indicative of the strength of air-ocean interaction processes [189,190]. As the cold air masses move further along above the warm ocean waters, they are apt to lose their static stability due to warming-up and moistening effects. The convective motion patterns resulting from this mechanism look very much like cloud roll-shaped banks, the distance between them increasing, as they travel further away from the coastal line (here the power of a convectively mixed layer tends to augment its thickness). The development process (additional warming-up) results in a two-dimension convection pattern transforming to a three-dimension pattern, i.e. to the open convective cells whose size is likely to vary as well. The heat flow at the air-ocean boundary beneath the cells may range up to 1200 W/m2 [194], this process being conducive to the development of powerful baroclynic zones and, as disturbances arise, it may effectively promote the "cyclogenesis processes". The latter mechanism is of paramount importance, because it allows the forecasters to promptly detect

191 the incipience of the extremely powerful atmospheric processes like tropical (hurricanes, typhoons) and extratropical cyclones.
A new and essential source of real-time, first-hand information about the mesoscale convective processes over the ocean was provided by the satellite-based radar sensing systems which made it possible to specify the conditions at the lower boundary of the lower atmosphere [182,184,191].
Now consider radar imaging of mesoscale convective cells (see Fig.3.5). The most commonly occurring sickle-shaped contour of MCC radar images was explained in [184,191]. Fig. 3.7 illustrates the air motion structure in open cells close to the lower boundary of a convective layer [188].
The length of the arrows is proportional to the horizontal wind speed. Fig. 3.8 gives a schematic sketch of how the composition of vectors in the rates of the total air masses and radial air currents of open convective cells contributes towards forming the field of return radar signals (whose intensity is proportional to the RCS of the aroused sea surface). It is seen that the sickle-shaped areas in radar images are oriented so that the velocity vector of the total air mass transfer is directed inward into the concave parts the "sickles" [191]. Examining the idealized diagram of the cell-structure of the closed-cell radar images (see Fig. 3.8) one cannot help but take notice of the dark-coloured ellipsoid patches (except the bright "sickles") that are contiguous with each of them from the windward side (the patches are illustrated relative to the background values of sea surface radar images). This decrease in the intensity of scattered radar signals results from the mutual compensation of the near-sea surface layer speed. This phenomenon is accounted for by the convective processes and the total air mass transfer.
As far as the convective closed-type cells are concerned, their particular feature is that the radial wind flows in each cell do not generate a uninterrupted ring (which is formed in between several adjacent cells). In the long run, what we perceive is that the radar images exhibit a newly produced sickle-shaped areas resulting from an increased spatial density of the sea ripple. These areas are oriented with respect to the vector of the total air mass transfer as is the case with open cells. However, unlike the instances where the open cells occur, the crescent configuration of the close cells should be considerably shifted relative to the cloud cell centers [191].
The air circulation in convective cells under real conditions differs, to a greater or lesser degree, from the axially symmetric one. The planar configuration of the cells is deformed by the effect of the total air transfer. The interaction between the circulation flows of adjacent cells and the combination of cell structures with cloud bank-like patterns, etc. are noted. Besides, certain distortions of the configuration of radar-imaged convective cells are caused by the dependence of scattered signal intensity upon an azimuthal angle between the direction of radar illumination of the sea surface and that of the background wind flow [171]. Thus, when interpreting the variations in the radar image brightness in the MCC-containing areas, both model representations and the possible deviations from them have to be taken into account. More detailed features about the structure of radar-imaged mesoscale convective cells are distinctly seen in Fig. 3.9. The radar images show the structure of those cells on the Norwegian Sea surface. It was acquired using the X-band airborne "Analog" complex. The "Analog" complex had a spatial resolution of ≈ 30 m. The radar image in question presents a fairly distinct picture of the small-scale structure features, specifically, the zones of the so-called near-sea surface wind "pulsations" caused by circulation processes and more pronounced zones of near-sea surface wind flow compensation.
Before we conclude the Chapter about the mesoscale convective cells we would like look into another mechanism, which, in our view, is highly essential, as it is directly responsible for the genesis of mesoscale vortices in mesoscale convective fields. As was

192 indicated above, the significance of this mechanism is quite understandable. This is one of the pathways by which this cyclogenesis process evolves, let alone the generation of the most hazardous cyclones – tropical ones, i.e. hurricanes and typhoons.
Fig.3.7. The air motion structure in open cells close to the lower convective-layer boundary [188].
1 – horizontal velocity vector; 2 – V=0; 3 – region with V>0; 4 – region with V<0

193
а b
c Fig.3.8. A typical spatial structure of the radar image (RCS field) of the sea surface during the cell convection in the atmosphere: a) for a single open-type cell in a static state; b) for a single cell and c) for the system of cells during the total air mass transfer (outward arrows) [191]

194 Fig. 3.10 shows the radar image of this mesoscale vortex (a), which was acquired
just at the instant of its incipience on the periphery of the large-scale convective-cell field south-east of the Kuril Islands. The image was acquired using the X-band SLR carried by the airborne "Analog" facility [192,193]. For comparison, Fig. 3.10b shows an optical image of the same area, which was acquired by a NOAA satellite. As evident from the radar image of the ocean surface around 10 km wide, one can clearly see the structure of the near-sea surface wind field of a mesoscale vortex that had originated within the system of convective formations against the background of the transversal wind speed shear. The aircraft visual observations and space optical information have provided the strong evidence for the incipient mesoscale vortex formation in that region. Its relatively small vertical dimensions (the upper boundary of its cloud structure was located at an altitude of ∼ 2 km) and the peripheral disposition of the wind flow suggest that it is exactly the barotropic instability mechanism that appears to be responsible for the vortex formation.
An in-depth analysis of the radar image showing the mesoscale vortex evolution allows one to determine the RCS and the near-sea surface wind speed fields (the dividing line is shown in Fig. 3.10a). The speed ranges between 4-5 and 15-17 m/sec, which corresponded to the RCS (σ0) values of -23 and -15 dB. The vortex is seen to have formed against the background of the external wind speed field of 10 to 12 m/sec. The spatial scale of the active and central undisturbed portion of the vortex was equal to 10-12 km and 2-3 km respectively. The visually observable cloud spiral-like structure at an altitude of 2 km above the sea surface (3 coils of the spiral) had an extent of up to 30 km.
In accordance with the semiempirical relation-ships between the wind speed V and energy, heat and mass transfer coefficients CD, CH, CE [194], the distribution of the transfer parameters in the ocean-air system of the wind speed field and its periphery is determined from the remotely sensed data on the wind speed field.
The cross-section of the field of the pulse transfer factors CD can be readily obtained from the plot in Fig.11a including the relation given in [194]:
CD = (1.02+0.0536V) ⋅10-3 (3.1)
To determine the evident heat, use is made of relation [194]:
H=ρacpCH(V)V(Tn-Ta), (3.2)
where ρacp is the heat capacity of the air volume unit, CH is the heat transfer coefficient, (Tn-Ta) is the temperature drop at the water-air interface. In-situ measurement data Tn = 20С, Ta= - 80С, this yielding an estimate of Н ≈ 200 J/m2s for the maximum speed field. Fig. 3.11b presents the graph variations in the flow of evident heat H on the vortex periphery and in its active zone. These variations are observable in 4 radar images acquired during the satellite flybys from different directions. Here Н0 is the average value of 2 х 10 km2 heat flow area across the flight track direction, ⟨Н⟩ is the mean value throughout the entire radar image. As may be seen from the results thus obtained, the near-sea surface wind speed fields exhibit a significant spatial inhomogeneity whose scale is on the order of 400 m. The distribution of the intensity of the transfer processes in the ocean-air system is around 50% in excess of the mean values beyond the active vortex zone.

195
Fig.3.9. A radar image of mesoscale convective cells in the Norwegian Sea. It was acquired
using the X-band airborne "Analog-1" complex SLR

196
a b Fig.3.10. Radar image of the central portion of the mesoscale vortex (a), originating at the periphery of the mesoscale convective cell system. The image was acquired using the SLR installed aboard the airborne complex "Analog". b is optical image of the same area from a NOAA satellite
Fig.3.11. а) path variations of the near-sea surface wind speed along a mesoscale vortex; b) relative variations in the flow of the evident heat H on the periphery of the vortex and in its active portion. These variations are observable in 4 radar images acquired during the satellite flybys from different directions. Here Н0 is the average value of 2 х 10 km2 heat flow area across the flight track direction, ⟨Н⟩ is the mean value over the entire radar image

197 §3.2 Determination of the near-sea surface wind field parameters from radar images
of the ocean surface
The primary goal of monitoring the oceanic processes in the air-sea system is to determine the sea-surface wind parameters by remote sensing techniques. The reason why this problem is essential is that, as the water surface is impacted by the wind force, the energy being thus produced is transferred to the oceanic surface. The wind energy is one of the critical factors that are responsible for the main patterns of ocean currents. Once the absolute values of speeds and directions of sea surface wind caused by a diversity of meteoformation (ranging from the weak up to highly disastrous tropical cyclones) are determined, the power of the winds, their impact of the structure of an active oceanic layer and other related phenomena can well be assessed.
The present Section of the book examines the specific features of the scientific expertise for determining the sea surface wind field parameters using the radar images acquired by the EOS SLRs of "Cosmos-1500"/"Okean"/"SICH-1" type. This evaluation technique is aimed at determining the normalized radar cross-section of the aroused sea surface in terms of the return radar signal level and correlating with the derived values to experimental/theoretical sea surface normalized radar cross-section dependences upon the sea near-surface wind speed . The experimental procedure had been carried out for many years and in order to demonstrate the validity of the scientific strategies that had been implemented, we present a series of analytical examples and results thus obtained.
)(σ0 V
It should be emphasized that the afore-mentioned techniques of determining the sea surface field parameters had received an unqualified, all-around approval at the institutions of "Goskomgidromet (the State Committee for Hydrometeorology) and the Navy Hydrography Administration of the FSU and, as a result, a set of regulatory-operating methodical instructions were later issued [195].
The patterns of the sea surface wind field are determined from radar data and in terms of the dependence of the scattered radar signal upon the speed of the wind and orientation of its vector relative to the sensing direction. The high sensitivity of the spectral density of the sea ripple which scatters the X-band waves and intensity of the scattered radar signal (and, accordingly, the normalized radar cross-section of the aroused sea surface) to the changes in the sea surface wind speed vector were referred to in the Chapter 1. This sensitivity allows one to observe even its weak variations, which makes it much easier to determine the wind direction by the spatial structure of a radar wind field "imprint".
To make the preliminary estimates of the sea surface wind field condition an operational analysis of space radio images is performed to make a prompt study into roughness field structure, to detect different sea roughnesses and identify them immediately from a radio image on a display screen or in a hard copy. As shown from the visual examination, the enhanced brightness zones are clearly discernible. They are caused by an increase in spectral density of the ripple under the effect of the sea surface wind. Also the reduced brightness zones are observed. Based upon the pattern of these zones a type of atmospheric formation is established. This formation is conducive to a series of process such as the atmospheric front, cyclone, mesoscale convective cells, etc., these processes being aroused the sea surface wind.
When studying the fine pattern of space radar images in a swath width of up to 500km the sea surface wind direction is frequently determined using different indirect attributes (or the tracers) and structural features of the spatial brightness distribution highlighted in radar images. These distinctive attributes are: radar shadows beyond the

198 evaluated areas of some coastland and some islands, which arise from shielding of the part of the oncoming air current; the character and organization of individual cells in the field of spatially ordered mesoscale convection; periodic structures resulting from orographic leeward waves; elongated streaky structures extended parallel to the direction of the sea surface wind vector; orientation of wind current convergence zones and many other factors.
In order to specify the nature of an atmospheric formation and the wind direction it is worthwhile to ensure that the optical data gleaned by the afore-mentioned radar-carrying satellites is concurrently utilized with radar data and in-situ ground-based measurements.
Evaluation of the scattered signal intensity is the major phase of on-line data processing. This is achieved by correlating the brightness level of the operating radio image field area with the gradation levels of radar calibration. The magnitudes of scattered signal levels and the wind directions that are found by means of plotted curves (see Fig.3.12) were used to arrive at the calculated dependences of signal levels in the SICH-1 SLR swath under different sea surface conditions. The curves shown above have been plotted for the most frequently used SLR operating mode with a view of determining the velocity modules of the sea surface wind. It should be noted that the data given in Fig.3.12 were obtained especially when the sea surface sensing is performed in the upwind direction. Therefore in order to acquire the data in an arbitrary sensing direction an azimuthal dependence of scattered signal intensity has to be allowed for. With this in mind one can make use of the following relation:
20)cos1(25,0)2cos1(3
10ϕϕ ++−
×=UUk , (3.3)
where U is the brightness of a select sea surface area in the levels of a calibration wedge (i.e. in a set of calibration levels). This area is determined visually or by image microphotometery. The procedure for evaluating the sea surface velocity modulus from a radar image is to: 1) to determine the range from the swath beginning (initial points) to a sea surface area of interest (D); 2) to evaluate the local wind direction (with one of the ways described above) and, accordingly, angle ϕ between the wind and sensing direction (this angle is counted off from the SLR calibration wedge along a line); 3) to determine the brightness of a selected sea surface area in the calibration wedge levels U; 4) to get the signal level adjusted according to (3.3); 5) to plot the obtained value of an adjusted signal level on the curves shown in Fig.3.12 with due account of the range to a selected area from the swath beginning; 6) to determine the sea surface wind speed using the above dependences. The next (basic) radar image processing phase is to determine the very parameters of the sea surface wind vector, primarily a velocity modulus, by measuring the scattered signal intensity. The generalized surface ocean normalized radar cross-section curves ( ) plotted as a function of the wind speed
0σV provide the basis for measuring the sea surface
wind. These curves were obtained by calculating with a model of the selective radio wave scattering by the aroused sea surface and by correcting those in terms of the data from many years' experiments which had been conducted [195] aboard a helicopter and an airborne laboratory.
An object to be processed is a radar image of the sea surface area, which was acquired by the EOS "Cosmos-1500"/"Okean"/SICH-1" type. This image is displayed as a two-dimensional digital information array (line-frame array structure, byte representation of numbers) on a magnetic medium. The procedure of feeding data into computer at a reception point and that preliminary normalization is not a topic for discussion herein.

199
Fig.3.12. The dependences of scattered radar signal levels in a SICH-1 SLR swath for different sea surface conditions
A higher accuracy of calculating the value of of the sea surface by computing
facilities is achieved by averaging a sea surface image over the areas whose dimensions are specified by an operator depending upon particular situations. For instance, when dealing with a homogeneous sea surface wind field (the wind direction within the field exhibits slight variations), we note that the size of an element to be averaged can measure 50 x 50
0σ
2km . At the same time for the mesoscale convection areas where the wind direction undergoes a dramatic change within 10 to 20km, the size of such an element should not be exceed of 5 x 5 2km . It is just in this particular fashion that a pseudoscatterometric mode is organized.
For each averaging element (i is the along-the-line coordinate, j is the
coordinate along the image frame) one is able to get some information on the wind direction
ijm
ijφ (it is determined by an operator using the data from the analysis of an initial
image), and obtain an exact value of from an averaged image through the simultaneous
use of initial and averaged sea surface images. Based upon the data from calculating
0jiσ
0jiσ

200
and the already found wind direction ijφ the sea surface velocity modulus is computed. For
this purpose the generalized curves of are utilized (see Fig.3.13). )(σ0 V
Fig. 3.13 The generalized dependences of the sea surface normalized radar cross-section ( ) upon the sea surface speed V for 0σ λ = 3сm and the vertical polarization when irradiating the surface in the downwind direction (solid lines) and at right angles to the wind (dashed lines) for different incidence anglesΘ
The procedure for determining ijV is as follows. The normalized radar cross-
section of the -th area of an underlying surface has the form: 0σ ijm
∑=ij ijij
oij
ijn
ij
p
oij DS
rPnGP
Lx22
4
22
33 164δλ
σ , (3.4)
where L are the losses in the SLRAR antenna feed line; is the SLR transmitter pulse
power; G is the antenna gain; pP
λ is the operating wavelength; is the slant range to a
reflecting area element; is the elevation-angle antenna diagram factor in the reflecting
area direction;
jir
ijD
ijδ is the radio wave transmission factor in the atmosphere (in most cases

201 for the X-band it is slightly different from 1); n is the number of elementary reflecting areas to be averaged. The true value of the total power of the received signal is given as:
( ) ⎥⎥⎦
⎤
⎢⎢⎣
⎡−⎟
⎟⎠
⎞⎜⎜⎝
⎛
−−= 2
2
221
1
33,1
nk
tij
nkbk
knij U
UUUU
PP , (3.5)
where is the power of the signal of a corresponding calibration wedge level; 1kP 1kU is the signal value of the corresponding step of the calibration wedge. The above value is averaged within a single gradation of the calibration wedge; is the true voltage value
of the signal at the i-th point of the j-th line of image with regard to the along-the-line signal correction which is performed in EOS-based signal processing unit (SPU):
tijU
=tijU
( )( ) NiK
NUU
j
bij
+−−1
, (3.6)
where is the measured voltage value of a signal at the i-th point of the j-th image line;
is the boost voltage arising in the SLR analog data transfer line; K is the gain
correction factor along the line of the image in the SLR SPU;
ijU
bU
nkU is the average value of the SLR receiver noise during the calibration signal transmission; N is the number of elements of radar image line splitting; is the current value of the point number in the
current line; ji
( ) ( )r R R H R R HdRij
ij= + + − +2 2 2 cos ; (3.7)
R is the Earth's medium radius; H is the medium EOS flight altitude just at the time of surveying; is the distance from the EOS orbit projection to an m -th area of the underlying surface for a real altitude, an initial delay of strobe burst that interrogate the signal (τ ) and burst time (
d ij ij
0 bτ ). As far as most of the ocean surface exploration problems are concerned, the residual geometric distortions of radar images can be ignored, and then we have:
( )( be
jbij dd
Ni
dd − )−+=
1, (3.8)
where denoted as the distances from the orbit projection to the and the beginning of a swath are determined by the following formula:
be dd ,
( )
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
⎟⎠⎞
⎜⎝⎛ +
⎥⎦⎤
⎢⎣⎡ +
−⎟⎠⎞
⎜⎝⎛ ++
=
RH
Rc
RH
Rd
bo
12
211
arccos
22 ττ
, (3.9)
whereas the area of an unit scattering cell:

202
ij
pijij
crS
Θ=
sin2sinψτ
, (3.10)
where ψ is the resultant SLR beam width in an azimuthal plane (for a transmit-receive
mode); c is the velocity of light in vacuum; pτ is the sensing pulse length; Θij is the radio
wave incidence angle for a given unit reflecting cell with due account of the Earth surface curvature:
Θij
ij
ij
ijarctg
RdR
R H RdR
dR
=
⎛
⎝⎜
⎞
⎠⎟
+ −⎛
⎝⎜
⎞
⎠⎟
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
+
sin
cos. (3.11)
Based on the calculations of using the values of 0ijσ ijϕ (i.e. an angle between the
direction of wind and that of incidence) found from an initial radar image, we determine the spatial distribution of the sea surface wind velocity modulus ijV . For this purpose the
calculated experimental relations of ( )V0σ (see Fig.3.13) are utilized. To find ijV , these
above relations are interpolated by the domain of arbitrary values of Θij, ijϕ .
Special strategies were elaborated to determine the sea surface wind parameters from the radar images of the aroused sea surface. Specifically, the EOS SLRs of the "Cosmos-1500"/"Okean"/"SICH-1" were involved in this mission. All these highly important operations were initiated and later closely supervised by the experts of the Kalmykov Center for Remote Sensing of the Earth (CRSE) of the NAS and NSA of Ukraine. In addition, a dedicated hardware-software support system was developed to allow radar data to be processed in an interactive mode using the computer of IBM PC type.
An algorithm for determining the sea surface wind parameters alone from the SLR data is shown in the top section of Fig.3.14.
Now consider a number of typical illustrative examples of determining the sea surface wind field parameters under different situations.
Shown in Fig.3.15a is the radar image of the Pacific Ocean surface near the southern coast of Alaska. It was acquired by the EOS SLR "SICH-1", 10.01.96 (orbit №1949). The distinctive features of this image are the more pronounced "imprints" of high-power sea surface wind flows: two of them are observed to move south of the island of Kodiak and one to the north of this island. The radio image, if carefully examined, indicates that the general trend of wind flows near the sea surface is determined unambiguously, i.e. it flows from north-west to south-east. This is clearly evidenced by both the orientation of the very air mass flows and by that of shadow zones close to the coastline and the nearby islands. In processing this type of image the spatial averaging can be performed over relatively large areas measuring ~ 50 x 50 . This averaging is needed to improve the accuracy in determining of the surface.
2km0σ
Fig.3.15b shows the map of the sea surface wind, which was generated on a computer using the data given in Fig.3.15a. It is shown that the wind speed of the air mass flows reaches 20 m/s. The radar data thus obtained are of particular usefulness, because they help to accurately fix the position of the wind flow boundaries, i.e. the zones highly

203 hazardous to navigation. In those zones the winds tend to change drastically at short distances of ~ 1 to 2 km. This location of boundaries can hardly be made possible with different remote sensing facilities and in-situ measurements. A somewhat different wind atmospheric situation is seen in the radar image produced by EOS SLR "SICH-1" in the Alaska Gulf area (see Fig.3.16a). The image was produce on January12, 1996 (orbit № 1971). In that area the atmospheric processes reveal intensive mesoscale convection. It is more sustainable in the southern zone of the gulf. In the northern section of the image of the oceanic surface (on the periphery of the mesoscale convection field), the atmospheric instability-forming processes are observed to occur (generation of mesoscale vortices). Under these conditions the sea surface wind direction is drastically changeable over relatively short distances. The variation in the wind direction across the mesoscale convective cells' field are so frequent [182] that it is next to impossible for the process-generated data to be put on the sea surface wind field map. In this particular instance, the only possibility is to evaluate not only the direction of the general air mass motions (when the mesoscale convection field is stable), but also the sea surface speed variation range. For the case in hand, as is shown in the bottom section of the image, the variation in the sea surface speed equals 10 to 15 m/s. The direction and sea surface wind speed relating to the other part of the image are shown in Fig.3.16b.
Fig.3.14. An algorithm for determining both the sea surface wind field parameters and the characteristics of tropical cyclones using the EOS SLRs of "Cosmos-1500"/"Ocean"/"SICH-1" type

204
а) b)
Fig.3.15. a) the radar image of the Pacific Ocean area (the Gulf of Alaska).
It was acquired by the EOS SLR "SICH-1" 10.01.96. b) the sea surface wind map generated after the radar data have been processed

205
а) б)
Fig.3.16. a) the radar image of the Pacific Ocean area (the Gulf of Alaska).
It was acquired by the EOS SLR "SICH-1" 12.01.96. b) the sea surface wind map following the radar data processing

206 §3.3 Tropical cyclones, hurricanes, typhoons
The remarkable aspect of the investigations into spatial and temporal variation of hydrometeorological parameters of the weather patterns of the tropics, specifically, in tropical cyclones, hurricanes and typhoons was that the present-day remote sensing technologies have demonstrated their far better efficiency. The reason behind this viewpoint is that a tropical zone is the major heat and moisture supply source for the Earth's atmosphere and, besides, the tropical cyclones pose a grave, if not totally devastating, threat to the natural environment.
Moreover, it should be realized that weather stations whose exceptional purpose is to make routine measurements of the atmosphere over the ocean surface are sparsely scattered across our globe and, for that matter, it is in fact so difficult to proceed with in-situ measurements under the conditions of sustained hurricane winds, high sea waves and heavy rains. At the same time, as the data gleaned from numerous full-scale and numerical experiments suggested, the satellite-based remote sensing provides some essential information needed to explore and monitor the tropical cyclone genesis and further development processes, to evaluate the intensity of these cyclones and to predict their paths.
The tropical cyclone is the atmospheric vortex that has the storm winds estimated to be over 17 m/s and developed from typical tropical weather patterns, i.e. cloud clusters, or the large bands of cumulus clouds extending from 300 to 500km. Only a small portion of clusters (around 80 in number from several thousands per annum) tends to evolve into tropical cyclones. And in this respect typhoons and hurricanes are found to be rare in occurrence. The extent of tropical cyclones is lesser than that of midlatitude cyclones (they are usually equal to hundreds of kilometers and seldom to more than 1000km in diameter). The central pressure of the tropical cyclone drops to as low as 900 gPa/km and less, whereas the pressure gradients amount to 0.5…2 gPa/km and up, the sustained wind speed reaches 50m/s and higher. These cyclones, as they travel along, often leave heavy fallouts in their wake.
The tropical cyclones can be discerned on the optical satellite images from a number of signatures in a cloud structure. The typical features of the developed tropical cyclone are the isolated, circular-in-shape solid mass of clouds, which resembles a disc with spiral branchings at the edges. In the center of the disc an eye of the storm is often visible.
The spaceborne radar observations of tropical cyclones were originally made in 1978 using SEASAT scatterometer whose space resolution varied between ≈ 50 – 70 km. As a result of these measurements, the near-sear surface wind (with average wind speeds of more than 30 m/s) was determined with sufficient accuracy. However, the values of V for weak and strong winds were found to tend to be over- and underestimated respectively [196]. The estimates thus made suggest that in order to look more closely into the tropical cyclone process (using, in particular, numerical integration procedures) greater resolving power is needed as compared to the one achieved in the course of scatterometric measurements. According to [197], this resolution should be 2 to 5 km in a tropical cyclone active zone and 10 to 50 km on its periphery. The above-mentioned parameters are consistent with the data provided by the “Cosmos-1500” / “Okean” /”SICH” SLR satellites. Now consider several examples of SLR observations of tropical cyclones using the above systems. Tropical Cyclone “Diana” The above tropical disturbance was brought about by cyclonically rotating thunderstorm complexes in the extra-tropical region lying north of the Bahamas Islands, and towards evening, on September 8, 1984 it upgraded to a highly intense tropical storm [171]. Two weeks before this particular tropical event which had been going through the formation

207 phase was spotted by the EOS “Cosmos-1500” SLR. Fig. 3.17 presents radar (at the right) and optical (at the left) images of tropical cyclone “Diana” in its initial nascency stage.
Fig.3.17. Radar (at the right) and optical (at the left) images of the tropical cyclone “Diana” in its initial formation phase. These images had been acquired from the EOS “Cosmos-1500” satellite SLR long before the cyclone in question was identified by monitoring services

208 Among the features that are quite discernible in the SLR image is a vortex-like near-sea surface wind structure of the large-scale cyclone. At this development stage the cyclone-driven near-sea surface wind speed still ranged between 17 and 20 m/s. The cloud array shape resulting from the effect of this particular process was not similar to the pattern typical for the developed tropical cyclones.
The second radar surveying of the tropical cyclone “Diana” was made just at a time when it had reached its peak developed status. The radar image shown in Fig. 3.18 b was acquired on September 11, 1984 when the atmospheric pressure within the cyclone center dropped to 952 gPa, whereas the maximum wind speed increased up to 56 m/s. The cloud mass diameter of above cyclone amounted to 5o of the meridian. The “Diana” cyclone was once again brought into the “Cosmos-1500” SLR swath width within 12 hours. By that time the cyclone had started losing intensity and, as a consequence, the atmospheric pressure in its central part rocketed up to 903 gPa and the maximum wind fell to as low as 40 m/s. The cloud mass size remained practically unchanged, whereas the size of the intense wind field showed a significant decrease. The hurricane moved eastward and a short time later described a loop-like trajectory [198].
The probing made by the EOS “Cosmos-1500” SLR and the measurement runs provided by the NOAA reconnaissance plane [199] were, for all practical purposes, virtually concurrent. This plane was flying in and around the hurricane at different altitudes while taking measurements of wind speeds, pressure, moisture content and other atmospheric parameters. In addition, it was making around-a-circle flights through the core of the hurricane, thereby surveying, as it were, the entire hurricane “body’.
Now examine some features of the satellite radar images of the “Diana” hurricane, which were acquired by the EOS “Cosmos-1500” SLR facility. As seen from the SLR image dated the 11-th of September (see Fig.3.18), a dark area of 13 to 14 km in diameter is nothing else but a typical hurricane “eye”. The wind speed therein tends to decrease, this process being attended by a rapid attenuation of gravitational-capillary waves and, accordingly, by a reduced level of a sea surface-scattered radar signal. Under these circumstances the total state of the sea within the hurricane “eye” region was characterised by extremely steep, high and hazardous longer surface waves. It is vital to note that the position of the developed tropical cyclone center can be determined from satellite radar images rather than from the images acquired in the visible and IR spectra region irrespective of high-altitude cirrus clouds.
An occurrence of a bright ring 4.0 to 6.5 km wide which encircles the dark core region is due to high wind velocities. The contrast transition between these velocities is caused by extensive spatial wind speed gradients. It some cloudiness is observable within the light-coloured ring, then it is said to hold a small amount of aerial water, and clearly in this case any precipitation (like rainfalls, etc.) is not so heavy. Thick clouds and possible fall-outs appear to be concentrated well far from the center and are chiefly predominant around the “eye” wall which can be discerned as a dark ring. The dark hue of the ring indicates that SLR signal attenuation in the double-fold passage through a hydrometeor layer in the “eye” wall is obviously dominant over a RCS increase due to scattering by raindrops. Hence, it follows that, firstly, the fraction of large drops in the size distribution of raindrops is insignificant and, secondly, the total effect of absorption in clouds and that of the attenuation in precipitation is relatively great. Sure enough, there is clear evidence that the clouds are featured by high water content and considerable vertical depth. The width of the ring is small and, as the radar data indicate, it varies between 5 to 6.5 km in the southern and western areas and 1.5 km north-eastern one. The hydrometeor band appears to be still narrow to the west of the cyclone center, because the radar shadow emerges beyond the precipitation zones [200].

209
b а cFig.3.18. Satellite images of the tropical cyclone “Diana”: a- visible image at 18 h 30 min 11.09.84 (“Cosmos-1500”); b- and c- SLR images at 18 h 30 min 11.09.84 and 8 h 30 min 12.09.84 (“Cosmos-1500”)

210 As shown by the radar image, the outer diameter of the “eye” wall is about 30 km,
which corresponds more closely to the hurricane’s “eye” dimension in a visible image (see Fig.3.18) where the brightest (i.e. the topmost) clouds are set off. With luminescence of lower clouds of the tropical cyclone, the dark spot diameter is reduced to between 17 and 20 km. Hence, the “eye” wall looks like an upward-expanding funnel.
The SLR image shows that the external edge of the “eye” wall is well pronounced, because the strong wind causes the ocean surface to get extremely rough, thereby producing a high-power scattered signal. Typically, the variations in SLR image brightness outside of the external “eye” wall result from the variability of the near-sea surface wind field and, to a lesser degree, from the variability of dissipation characteristics of precipitating clouds.
Thicker clouds and natural fallouts are recorded of the boundary of the central continuous cloud spot (a narrow band at about 60 km from the center) and within the confines of a cloud spiral. With a total decrease in SLR image brightness, the downwind-oriented rain cells 4 to 10 km long are highlighted under the above spiral. These cells are visible due to the typical negative contrasts. A number of cells are seen above the land as well.
The alternating light-and dark-coloured concentric bands are more conspicuous at ranges between 25 and 45km, especially in the north-west and south-east sectors. This effect is probably caused by the internal gravitational waves generated by the travelling central region of the tropical cyclone.
Now examine the radar image shown in Fig.18c. The filling up process that had commenced resulted in the change of wind speed fields and hydrometeors. The “calm” zone in the hurricane “eye” is seen to diminish. The boundaries of the bright ring where the wind speeds are close to maximum ones are observed to be not so sharper as compared to the patterns in Fig.18b. This indicates that the spatial wind field gradients have decreased. The intensity and “eye” wall width are shown to have dramatically reduced and the wind speed outside it has decreased. As a result, two spiral-shaped chains of rain cells inside the cloud spiral appear to be brighter as than the surrounding background. The chains are located at 120 and 270 km from the tropical cyclone center, their width being equal to 10 and 12 km.
The comparison between the SLR images acquired only 12 hours apart allows the direction and the average speed of a tropical cyclone to be determined from the displacement of its central part that exhibits a high radar contrast. It is found that within 12 hours the “Diana” hurricane has shifted north-north-eastward by about 85 km. In other words, it travelled at an average speed of 7 km/h.
The SLR image data on the spatial near-sea surface wind field structure enable other tropical cyclone parameters to be estimated [201].
To determine the “Diana” hurricane parameters two near-sea surface wind field cross-sections were chosen (to the east and to south of the “eye” center). Data processing was performed according to the algorithms presented in §3.2. Fig.3.19 shows the dependences of tangential (Vt) and normal (Vn) components of the near-sea surface wind speed upon a distance from the hurricane center (r) along the latitudinal and meridian crosscuts [201].
The hurricane parameters were estimated according to the analytical model proposed by V.V. Shuleikin [202]. By using that model the range-dependent average values of the wind speed components are adequately described by the following relation:
, )/ln( max,max,, rrBVV tntntn −=
where rmax is the “eye” radius of “Diana” hurricane (15 to 20 km along an outer edge of the dark oval in Fig.3.18b). In this particular instance we have Bn=3.15 m/s, Bt=15.3 m/s.

211
Fig.19a. Tangential (Vt) and normal (Vn) components of the near-sea surface wind speed as a function of a distance from the hurricane “Diana” center (r) along the latitudinal and meridian crosscuts
Fig.19b. The dependences of the wind speed module of the “Diana” hurricane upon the distance to its center according the data provided both by the SLR (1-latitudinal and 2- meridian crosscuts) and by the NOAA reconnaissance aircraft (3-latitudinal and 4- meridian crosscuts)
The functions Vn,t=f(r), which were thus derived in keeping with the description in [202], were utilized to compute the pressure variation and the vertical wind speed component as a function of the distance to the hurricane center (see Fig. 3.20). In this particular instance the radius of the upward air current region was equal to around 200 km. The obtained parameters were used to estimate the total power of the hurricane at 1.2x108 MW, which on the order of magnitude is in good agreement with the data given in [202, 203]. In processing the radar data on the Diana cyclone allowance was made for several factors that might distort the near-sea surface wind field parameters. Basically, these

212 factors were storm rains and rain-bearing clouds. The high-intensity rain showers fall out on limited areas simultaneously.
Fig.3.20. Variations in pressure ∆p and the vertical air current velocity component (Vn) as a function of distance ( r ) to the hurricane center
These areas can be easily identified in SLR images and left out from further analysis. As far as cloudiness is concerned, the substantial absorption of X-band radio wave can be attributed to cumulus and cumulonimbus clouds, whereas for most types of clouds this value is insignificant. In analyzing Fig.3.18b, it is easy to ascertain that the SLR image of land shows no trace of any cloud pattern left in the wake of the developed hurricane, this fact suggesting that radio waves get slightly attenuated. At the same time the absorption in the deep clouds of the tropical cyclone cannot be presumably ignored. Therefore, the estimated data on the maximum near-sea surface winds are likely to be somewhat undervalued. Yet the comparison between the data collected during SLR measurements of wind velocity and the in-situ measurements provided by a NOAA reconnaissance aircraft [199] is clearly indicative of their fairly good agreement. Fig.3.19b shows the module of the "Diana" hurricane wind speed as a function of the distance to its center according to the SLR data (1-latitudinal and 2-merivdinal crosscuts) and the data provided by NOAA reconnaissance aircraft (3-latitudinal and 4-merivdinal crosscuts). It should be stressed that the "Diana" cyclone SLR observations (the hurricane being most intense for a season of 1984), involving the use the EOS "Cosmos-1500" SLR was the pioneering scientific effort that made it possible to collect the remotely sensed data on this extremely dangerous phenomenon in its main formation phases. The satellite-derived remote information complemented with other valuable data was the first-ever practical tool for the US experts who could effectively monitor the hurricane dynamics in an effort to stave off human casualties and mitigate the loss of property in the Wilmington area (North Carolina, USA) where the hurricane epicenter had just reached its point. The most efficient data-acquisition-and-handling capacities of the EOS "Cosmos-1500"/ "Okean"/ "SICH" SLR whose specific mission was to monitor tropical cyclones can be demonstrated with the SLR observations of the Louis hurricane in 1996. Fig. 3.21 illustrates optical (a), SLR (b) and MW-radiometric (c) images of the Louis hurricane, acquired by the "SICH-1" EOS satellite on September 10, 1996. In addition to this illustration, an enlarged portion of the SLR image (d) and the near-sea surface wind map (e) are given, which were produced using the spaceborne SLR data (d). In these

213 pictures shown are the speed and the direction of the near-sea surface wind as well as the heavy precipitation zones.
а b c d e
Fig.3.21. Optical (a), SLR (b) and MW-radiometric (c) images of the Louis hurricane, acquired by the "SICH-1" EOS satellite on September 10, 1996. In addition to this illustration, an enlarged portion of the SLR image (d) and the near-sea surface wind map (e) compiled using the spaceborne radar surveying data. Therein shown are the speed and the near-sea surface wind direction as well as the heavy precipitation zones

214 Based upon the previous optical observations, the Louis hurricane was qualified as the most hazardous, the reason being that the extent of cloud depth ranged up to 2000 km. The Caribbean Sea countries had taken a great many preparatory and preventive measures that totalled several tens of millions of dollars. And it was precisely in terms of the remotely sensed data collected by the "SICH-1" SLR that this particular hurricane was found to be of lower intensity, because its maximum near-sea surface wind did not exceed 35 m/s. In other words, this tropical cyclone might well be assigned to the category of an intense tropical storm. Thus, the practical evidence that was made available once again supports the notion that using the real-time SLR data allows one to take a sober view of the threat posed by active atmospheric processes and to appropriately respond to it.

215 §3.4 Comparison between remotely sensed radar data and in-situ measurements.
Estimation of validity of definition of the near-sea surface wind field parameters from radar data
A large number of images of an aroused sea surface has been produced by the spaceborne SLR over a period of time ranging from 1983 up to the present day. The results these radars had by then yielded strongly suggest that in terms of their performance characteristics they are capable of observing the genesis and development stages of different atmospheric processes, including the most dynamic and disastrous events such as tropical and extra-tropical cyclones. An additional positive feature of the above radar facilities is that they allow monitoring the atmospheric eddy process both in their initial formation phase (with the sea surface wind of ∼ 5 to 10 m/s) and in their well-developed stage when the tropical cyclone wind speed is more than 50 m/s. This type of a severe weather event is clearly demonstrated in the radar images shown above.
To put things in a most favorable light and address the unique operational capabilities of these radar systems, it may be safely stated that the satellite-based SLRs can predict the oncoming tropical cyclones, determine their parameters and their structure on a real-time basis and to specify the paths likely to be followed by these cyclones [201].
Clearly the data provided by the EOS SLR "Cosmos-1500", which was the very first facility to be operated under specific conditions, had urged the experts to raise an issue of validity of determining the sea surface parameters from remotely sensed data. As far as the hardware aspect is concerned, the validity of determining these parameters (above all, the wind speed module) is afforded through the use of total internal calibration of the SLR receive-transmit channel and by the accuracy in measuring the antenna and waveguide channel parameters. To carry out the field check of accuracy in determining the quantitative characteristics of the sea surface wind field from radar images of the oceanic surface, a series of dedicated experiments were to be conducted. One of these experimental trials was arranged in the north-eastern area of the Pacific, close to the US coast, in the summer of 1984 during the cruise of the scientific research vessel "Professor Mesyatsev".
The areas in which the afore-mention vessel was sailing around were under the routine surveillance by the EOS "Cosmos-1500". The in-situ weather data was being dispatched from the US Weather Bureau.
As part of experiments on the sea surface conditions a great variety of meteorological processes were observed to occur over the vast oceanic expanses. The wind speed was wide-ranging and reached 20 m/s. The remotely sensed radar data were correlated to in-situ measurements that were spaced apart in time by more than 2 hours.
Now by way of illustration, we make a comparison between the radar and in-situ data on the sea surface wind of the coast of Canada, in the Alexander Archipelago and the Queen Charlotte Islands.
In the radar image (see Fig.3.22a) an enhanced intensity zone of a scattered signal is highlighted. Its sharply-outlined northern boundary indicates that a frontal zone is just right therein. The second frontal zone is seen as being parallel to the shoreline. Typically the wind flows move along the frontal zone boundaries. In view of the fact that this particular configuration of atmospheric fronts suggest that a low-pressure zone is located between these fronts, it is easy to specify the wind propagation direction at the northern boundary of zone (about 2600). The wind speed as measured from the radar data is about 15m/s. The wind flows turns northward further on, its speed gradually decreasing from 15 to 7m/s. The along-the-shore wind flow is directed at ∼ 1400.
In the central part of the enhanced intensity zone of a scattered signal, the wind direction is governed by orientation of large-scale irregularities in a brightness field (around 240 to 2500). In the bottom part of the picture a weak wind zone is located. In this particular

216 instance, the wind direction cannot be determined by a radar image. Therefore the sea surface wind module is estimated at 5 to 10m/s only.
Fig.3.23 presents a synoptic map compiled by US experts using the in-situ measurement data (it was constructed after the radar image had been recorded). The wind parameters indicated therein are consistent with the SLR data. However, the frontal zones are shifted westward, because the in-situ and remote measurements were not made simultaneously (the frontal zones are displaced eastward).
The radar and in-situ data were compared in the course of the above measurement runs. The results of this comparative procedure are shown in Fig.3.24 (itemized under №1,2 and 3). In these graphs the following symbols are used: dark circles (1) are for the wind field parameters relevant to the cases where the sea surface wind direction could be determined from the spatial structure of radar images. The light-colored squares are for cases where the general direction of air mass movement was specified in mesoscale cellular convection areas; the dark-colored squares are for the cases (for no more than 5% of total results) where it was impossible to determine the wind propagation direction using the radar images.
Of utmost importance was the second run of measurements and the correlation between the data obtained during the monitoring of the tropical hurricane "Diana"-84 in August - September 1984. The data that could be collected using the radar technique and in-situ measurements were simultaneously compared for the wind speeds widely ranging between 5 to 10 m/s and 50 to 56 m/s. Moreover, a comparison was made between the EOS SLR "Cosmos-1500" data and those from directly measured wind speed and direction at an altitude corresponding to pressure P=850 mBar. All that information was obtained from a NOAA airborne laboratory after the radar measurements had been accomplished [199]. The results from these comparisons are presented in Fig. 3.24. They are marked by light-colored circles (4) and in good agreement despite the different methods of achieving both radar and in-situ data. The disparity in absolute values of wind velocities does not exceed 25% and that in the wind direction is ~ 200.

217
a b Fig.3.22. Radar (a) and optical (b) images of the pacific area near the western coast of Canada (EOS "Cosmos-1500). 1-the Alexander Archipelago; 2 – the Charlott Queen Islands

218
Fig.3.23. Synoptic map for 12 h. 00min (GMT), June 30, 1984
Fig.3.24. The results obtained from the comparison between radar and in-situ data. The following symbols are used: the dark circles (1) denote the wind field parameters for cases where the sea surface wind direction could be determined from the radar images' spatial structure; light-colored squares are for those cases where the general direction of air, mass shifting was determined in the mesoscale cellular convection areas; the dark-colored squares are for the cases where it was impossible to determine the wind direction using radar images; the light-colored circles (4) denote the results from the "Diana" hurricane parameters

219
§3.5 Widespread effects of hazardous atmospheric processes in coastal areas and inland seas
Nowadays the aerospace remote sensing technologies are being used worldwide to
observe the development stages and displacements of active processes in "ocean-atmosphere" system. While the conventional space-based optical systems are still in use, the last ten years' practice has been demonstrating the continuous observations that were primarily focused on the World Ocean through the use of scatterometric radar systems of the ERS, ADEOS and Quickscat satellites. The wide swaths of these systems can be effectively utilized to allow the data on the near-sea surface wind field over the ocean to be collected throughout a day. As numerous territories are occasionally in for calamitous, exceedingly active atmospheric processes and can be badly hit by devastating storms like hurricanes, typhoons, high-power cyclones, etc., any space satellite-derived information on the oceanic surface wind is of paramount importance and finds the widest use. However, according to the data collected by the spaceborne EOS SLRs of the "Cosmos-1500"/ "Okean"/ "SICH" type, the near-sea surface wind fields in coastal areas of the World Ocean and in fringing seas are frequently characterized by some regional features pertaining to orography or coastal topography. Typically these features inherent in high-power atmospheric processes have a spatial scale of their irregularities ranging from units to tens of kilometers, and this being so, they cannot be resolved and identified by up-to-date scatterometers whose resolution varies between 20 and 50 km. At the same time it is generally known that the coastal areas of the World Ocean, fringing and inland seas are the major life support zones for hundreds of millions of people, large-scale mineral prospecting, busy shipping routes, fishing, etc. All the processes that occur in those areas cannot but have a dramatic impact upon mankind. Moreover, since the sea depths in these areas are not to great, the most severe aftermaths of the hazardous atmospheric processes might oftentimes be expected. The grave run-up and run-down phenomena are observed (i.e. the water level is likely to rise by 5-6 meters and, as a consequence, the vast coastal areas may get heavily inundated). Besides, this dangerous effect may result in "fiercely" aroused sea waves. Therefore it is vitally important to ensure that intense atmospheric processes in the off-shore regions of the World Ocean, around fringing and inland seas are constantly monitored. In these zones the best results are obtained through the use of the OES SLRs of the "Cosmos-1500"/ "Okean"/ "SICH" series types which offer optimal spatial resolution and effective swath widths.
In [204] the results from the analysis of the integrated thematic processing of the spaceborne SLR data collected over the Black and Azov Sea areas are cited. They suggest that the near-sea surface wind field (and, consequently, a roughness field) exhibit some essential features in a littoral zone. The effects of adapting the atmospheric boundary layer, as it traverses the "land-sea" boundary, generate the wind flow disturbances that spread over the regions whose cross-sectional dimensions came up to several hundred kilometers. The wind speed within these regions may undergo rather intricate variations depending upon the thermal and geometrical properties of the boundary.
Fig. 3.25 a, b, c shows a series of SLR images of the eastern part of the Black Sea. They were acquired by EOS "SICH-1" between 17-th and 20-th March, 1996. The first, second and third pictures were taken: 1-17.03.96 at 07.33 GMT, 2-within about 12 hours (19.19 GMT) and 3- 20.03.96 at 07.11 GMT respectively. All the above images display a jet-like wind intensification resulting from the specific features of mountainous terrain. These features tend to govern the "wind tunnel"-type effect for eastward winds. According to the estimates in [204], the wind jet extended up to 150 km and was around ∼40 to 50 km wide. The maximum wind speed in the jet core and its "mouth" was observed in the evening on the 17-th of March and came up to about 20 m/s.

220
а
b

221
c Fig. 3.25 а, b, c. SLR images of the eastern part of the Black Sea acquired by EOS "SICH-1" on March 17 through 20, 1996. The first image (orbit N2930) was taken 17.03.96 at 07h33min GMT, the second (orbit N2937) was taken within 12 hours (19h19min GMT) and the third (orbit N2974) was taken 20.03.96 at 07h11min GMT). The above pictures illustrate jet-like strengthening of the eastern wind from the Transcaucasia region, which was caused by the specific features of mountainous terrain
The above-described local atmospheric phenomena that actually pose the grave
threat to navigation are not recorded by spaceborne scatterometric systems. At the same time the data coming in from the coastal weather stations make it rather difficult to accurately estimate the degree of an impact these atmospheric episodes can possibly produce far out into the sea. Using the SLR data is the only way to spot warships and give them a timely warning about the critical situation they may be in for, if caught up in a hazardous atmospheric zone.
Fig. 3.26 presents a SLR image (acquired by the EOS "SICH-1" 27.10.96) of yet another menacing event, i.e. the atmospheric cyclone in the eastern part of the Black Sea. The spatial scale of the developed vortex was well in excess of 250km. The vortex structure is clearly visible, especially its most hazardous front in the southern part, close to the coast of Turkey. The near-sea surface wind speed at the boundary of this front tends to vary from 2 and 3 m/s up to more than 20 m/s in a zone 5 to 10km long. This particular phenomenon is thought of as highly dangerous to sea-going vessels. The cited scatterometric data from the ADEOS satellite [201] provide a considerably smoothed-out wind field and do not give any indication to this hazardous zone.

222
Fig.3.26. An image of the cyclone in the eastern part of the Black Sea (acquired by the SLR EOS "SICH-1", orbit N6226). The near-sea surface wind speed shows a sharp increase from 2 to 3 m/s and may run up to more than 20 m/s at the boundary of the atmospheric front in its southern part, close to the coast of Turkey. White arrows - marked of the atmospheric fronts; black arrows - run-down winds
In some off-shore areas of the World Ocean, marginal and inland seas a great number of dangerous atmospheric processes may still be predominant. These processes cannot be effectively observed using spaceborne scatterometric and other conventional world-wide observation systems (in particular, by optical and IR facilities). Meanwhile these phenomena are clearly visible in spaceborne SLR-produced images. These are the so-called run-down winds that are generated in a littoral zone. This phenomenon is vividly exemplified by the noteworthy "bora" in the vicinity of the port of Novorossiysk. The greatest danger is also lurking in the zone of gusty winds that, on frequent occasions, may exceed 20 to 25 m/s are typical when these winds follow the atmospheric fronts. Figs 3.27 and 3.28 give the examples of these phenomena in the Black Sea basin.

223
Fig.3.27. The SLR image of the eastern area of the Black Sea (acquired by the EOS "SICH-1", orbit № 1487, 10.12.95) The jets of run-up winds are clearly seen in the Novorossiysk-Tuapse region. The wind speed exceeds 17 m/s. The run-up zone is extended out into the open sea by more than 150km
Fig.3.28. The SLR image of the eastern part of the Black and Azov Seas (acquired by the EOS "SICH-1", orbit № 3809, 15.05.96). In the water areas of the Black and Azov Seas one can observe the zones (10 to 30km in extent) of squally winds with a speed of more than 17 to 20 m/s. These zones are well pronounced and can be identified from space using the SLR facility

224 An example is given of the situation shown by the image in Fig.3.29 (acquired by the SLR EOS "Cosmos-1766" (a) and thematically interpreted (b)
а b
Fig.3.29. The SLR image (on the left, a) of the Baltic Sea area, the Riga and Bothnia gulfs (acquired by the EOS "Cosmos-1766", 26.07.88). On the water area of Riga gulf the border of the atmospheric front caused by a powerful cyclone is well observed. Interpretation of this image (on the right, b) shows that in a zone of this border the wind becomes stronger from 5 m/s up to more than 20 m/s
In the light of the progress that had been made by the remote sensing technologies over the part years, it would be appropriate to mention one of the incidents that had taken place in the Gulf of Riga (Latvia) where a traditional regatta was being run on a fixed route

225
between Pyarnu and Riga. Regrettably, the organizers and the participants of this event appeared to have ignored the space satellite-derived information they could have made use of on the spot and, as a result, the tragic outcome immediately followed. Everything was happening just before the finish line. Those who were involved in the race got trapped in a zone of the most potent gust front that came sweeping across the gulf water area, as it moved eastward. The wind was so fierce that it immediately overturned several yachts and a number of sportsmen were drowned. They met their dreadful fate at night-time when it was virtually impossible for the rescue operations to get started. There is no doubt that this catastrophe might as well have been prevented.

226
§3.6 Use of multifrequency radar data for monitoring of the aroused sea surface state
Radar observation of the sea surface at different wavelengths makes it possible to collect much more data. This can be explained as follows: since the different spectrum portions of the sea surface roughness are the major scatterers of different radio wavelengths, they exhibit a different response to the near-sea surface wind, surfactants spilled across the sea surface as well as to subsurface formations. For example, Fig.3.30a [141] shows a radar image of the Pacific Ocean surface near the Bering Island. It was acquired by the "MARS" airborne complex at X-band, whereas Fig.3.30b presents a synchronous radar image of the Pacific area near the same island, which was acquired at L-band using the same airborne complex. Fig. 3.30c illustrates an interpretation map laid out using the multifrequency radar data provided by the “MARS” system.
Fig.3.30а. A radar image of the Pacific Ocean area near the Bering island. It was acquired by the airborne complex "MARS" at X-band. The sea surface wind field, atmospheric front and run-down wind jets are clearly visible
Fig.3.30b. A radar image of the Pacific Ocean area near the Bering island. It was acquired by the airborne complex "MARS" at L-band. The wind field irregularities are faintly visible whereas the big waves are distinctly seen

227
Fig.3.30c. An interpretation image produced using the synchronous radar images of the Pacific Ocean area near the Bering island. It was acquired by the airborne complex "MARS" at X- and L-bands. Use of the synchronous multifrequency radar-tracking data allows determining both the peculiar features of structure the near-sea surface wind, its speed and the length and a direction of big sea waves
In conclusion, we can state that the joint use of the radar remote sensing systems that are appropriately selected in terms of wavelength ranges open up the possibilities to retrieve a much larger amount of data on the sea surface state as compared to single-frequency systems. The X-band radio waves are scattered by the sea ripple ( cm25.1 ÷=λ ), which is caused by the near-sea surface wind because of its low sluggishness. The L-band radio waves are scattered by longer sea waves ( cm1510 ÷=λ ), which are more sluggish and do not show an immediate response to the spatial sea surface wind fluctuations. These fluctuations are governed by the big waves' modulation. Therefore the simultaneous sensing of the sea surface at X- and L-bands makes it possible to obtain synchronous data on the sea surface wind field and high sea state. This on-line information is highly essential to navigation and can effectively help select the safest routes and to reduce the transport time and cost incurred.

228 CHAPTER 4. ON-LINE RADAR SEA ICE MONITORING. ENSURING THE
NAVIGATION SAFETY IN ICE CONDITION
§ 4.1Experimental investigations into the signatures of microwave sea ice backscattering
An important phase in developing the techniques and the facilities for radar remote
sensing of the Earth natural environment are the aircraft- or helicopter-aided studies. The overriding purpose of these studies is to optimize the remote radar diagnostics procedures and to validate the concepts of building the equipment that put the appropriate methods to practical use.
The results previously discussed in [64-66, 69 et al.] and many years of experience gained from using the airborne SLAR's as a suitable tool for ice reconnaissance strongly suggest that the radar-oriented methods to remotely diagnose the sea ice is found to be quite efficient. However, the amount of data on the energy characteristics of microwave backscattering by the sea and ocean ice sheets is scarce. This can be explained as follows. Numerous on-ice and helicopter measurements have been made in the range between 1 and 17 GHz (see [66, 69]) and in different polarizations. Yet in this particular case a limited area to be explored could not cover all conceivable observation events that might arise under field conditions. At the same time, the discrepancy in the normalized radar cross section measurement data comes up to 7-10 dB (see, for instance, [64, 66, 69]). Such a large spread in measurement data may be attributed not only to the equipment calibration features and measurement errors but also to roughly estimated characteristics of the ice sheet under study and variations in the normalized radar cross section of similar-in-age ice floes. This is clearly evidenced through the examination of numerous images that were acquired when the SLAR referred to as "Toros" [70] was in normal operational use. In the meantime the quantitative data on the spatial variations in the normalized radar cross section of sea ice had still been unavailable before the "Cosmos-1500" SLR was developed.
Under these circumstances a strong need arose to embark upon special-purpose investigation into the signatures of microwave backscattering by sea ice under field conditions in different regions of the Arctic Basin in an effort to collect the data to be used for devising the spaceborne SLR data processing and interpretation procedures. Since the experimental regions were outlying and hard-to-reach, the field measurements could be performed using an aircraft only. At the same time , the airborne radar-equipped complex called "Analog" similar to spaceborne SLR enabled the integrated measurements when calibrating the SLR and optimizing the space-derived data interpretation techniques.
The SLAR airborne laboratory was used to map and retrieve the quantitative data on the scattering properties of an underlying surface over a wide swath. The SLRAR output data is represented as two-dimensional images showing the intensity of radar reflections from the surface being explored in a coordinate system: path distance and horizontal range. Image brightness is proportional to the intensity of a received signal.
In the experiments involving the use of the SLAR a special emphasis was placed upon the measurement of normalized radar cross section absolute values.
As indicated above, a relative calibration method is the most accurate, which compares the intensity of scattered signals to that of the signal received from a reference reflector in conjunction with continuous internal calibration of SLAR channels. In general, an error in estimating the normalized radar cross section by way of comparing to the standard reflector is within 2 to 3 dB [60, 64].
The SLAR equipment calibration using the returns from the water surface at angles close to the vertical ones has turned out to be highly efficient in making prolonged, non-stop flight under polar ice conditions [60, 205].

229 In calibrating the equipment on smooth water surface the measurement accuracy
(during the experiments in the indoor pool) was within 2 dB. With aircraft measurements it is more advantageous to perform airborne radar measurements across the disturbed water surface with a sea state of 3-4 numbers, because under field conditions it is practically impossible to select a relatively extended area of the smooth water surface.
In calibrating the radar potential, the measurements of relative receive power (where )0(/)( 0
rr PP θ θ and are the current and nadir incidence angle values,
accordingly) and calculations of were respectively made. The relation thus derived in view of (1.40) was described by the function:
0θ)0(/)( 000 σθσ
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−
≅ −2
24
00
0
2expcos
)0()(
eff
tg
γ
θθσ
θσ, (4.1)
which determined the value of . The following value was then found: 2effγ
2200 2/)0( efffK γσ = , (4.2)
The received signal level that corresponds to was accepted as a reference
signal and utilized during subsequent measurements.
)0( 00σ
The procedure discussed above resulted in the normalized radar cross section measurement accuracy which is practically much the same in terms of reference reflector calibration. Yet it enabled the airborne radar measurements to be readily prepared and carried out right from an aircraft [60]. Note that under calibration measurements using the reflection from the water surface, the anisotropy of the normalized radar cross section azimuthal dependence was to be taken into account.
Thus, as the measurements were made using an airborne laboratory during the prolonged flights in the Arctic conditions, the SLAR calibration against the aroused sea was found to be acceptable. In this case an expression for can be written as: )(0 θσ
)0()()()(
)()0()( 00332
3200 σθ
θθθθθσ
rc
r
cm
mC
PP
COSHGLHGL
∆∆
= , (4.3)
where is the size of a resolution element in the plane perpendicular to the flight direction;
L∆)(),( mC GG θθ are the magnitudes of the normalized antenna pattern in the
elevation plane, these magnitudes corresponding to during the calibration procedure and
00=θθ in the course of measurements; is the received power of the
calibration signal; are the flight altitudes during calibration and measurement operations.
rcP
mC HH ,
The experimental work that had been done indicated that the mean-square error in normalized radar cross section estimation was within 3.5 dB. In this case an error in

230 calibrating the receive-transmit channel is less than 0.7 dB whereas the errors in estimating radar contrasts did not exceed 1.2 dB.
Now we will describe the efficient performance of the multifrequency radar remote sensing of sea ice using the data collected by the radar-facility "MARS".
One of the primary goals achieved by means of the "Analog" complex was to examine the properties of radio wave backscattering by sea ice under field conditions. In this context a primary task was to gather data on the signatures of radar returns from the sea and oceanic ice sheets in different parts of the world and at different ice formation stages. The acquisition of this data was needed to develop spaceborne side-looking radar facilities and to devise the space-derived data interpretation procedures.
Measuring the characteristics of radio wave scattering by sea ice from aircraft poses some challenges. According to what has been stated in Chapter 1, the sea ice sheets are an aggregate of separate floes (ice fields) of different age. Their distinguishing feature is a wide-ranging spectrum of size and a great variety of shapes which are normally frozen-up. The major characteristic that accounts for ice thickness and generalizes its physical-chemical and electro-physical properties is the ice age. It is quite reasonable to relate the intensity of sea ice-scattered radio signals to ice age as well. The variations in the texture and properties of ice are likely to bring about considerable spatial fluctuations of radar signal intensity. This particular point was to be taken into account in carrying out experiments and data processing.
Figs 4.1 and 4.2 show examples of en-route recordings of radar signals scattered by sea ice of different age. These signals were received by the "Analog" SLAR over the autumn-winter period in the Arctic basin. The recordings were made during the horizontal flight at an altitude of 7000 m. The ground speed was ~140 m/s; the low filter pass band was 0.6 Hz.
All the afore-mentioned examples are pertinent to the major types of drifting ice in the Arctic basin in conformity with their classification [48, 49]. As evident from the recorded material, the fluctuations of sea ice normalized radar cross section estimation are considerably greater as compared to the normalized radar cross section estimation of the homogeneous sea surface.
The normalized radar cross section estimation variations result both from the features of the spatial texture of the ice cover under study and from the spatial inhomogeneity of the normalized radar cross section estimation of similar-in-age ice. For instance, variations in the radar signal intensity, as the measurements are being made in the nilas and grey ice areas, ranges between 15 and 20 dB and over (see Figs 4.1b, 4.1c). In the areas where thin first-year ice is dominant one can observe the cracks with gray and white-gray ice, the normalized radar cross section estimation of the latter being by 5 to 10 dB greater as compared to the first-year ice (see Figs 4.1b, 4.1c). At the same time, as seen from the above recordings, the normalized radar cross section estimation values of sufficiently homogeneous areas of thin first-year ice differ by 4 to 6 dB. The path recordings provide a clear evidence of the spatial inhomogeneity of signals scattered by thick first-year and multiyear ice. It should also be noted that airborne radar measurements often make it difficult to identify the fluctuations of the en-route recordings with the inhomogeneities of the ice cover under study, which are visually observable. As stated above, with the radar imagery of the surface being examined, the inhomogeneities of signals can be easily identified. In this case, during the measurement sessions and in data processing one can also make use of the spatial correlation properties of radar imagery.
Prior to the airborne radar measurements a specific area under study had been previously selected using the ice reconnaissance data. These particular data were re-determined during the low-altitude flight. All these operations were performed including the en-route observation data. A selected area was then mapped along with a synchronous

231 en-route recording of a radar signal. The ice cover area where the measurements were made was selected with regard for the express analysis of radar imagery and en-route recordings.
Fig.4.1. En-route recordings of radar signals, θ = ; а – o40
nilas, gray ice; b, c – thin first-year ice. The arrows point to the cracks covered with nilas and young ice
Fig.4.2. En-route recordings of radar signals, θ = ; а – thick first-o40year ice; b-area with first-year and multiyear ice; aroused sea surface
(sea state ~ 3 number)

232 One has to come up against a diversity of factors affecting the sea ice-scattered
radar signal. In addition, a priori data are rather scanty and this turns out to be quite a challenge to work out general guidelines for processing radar measurement data. Therefore, as the data are being handled, it is necessary that the distinctive features of scattering characteristics and the relations between the latter and the properties of a particular type of ice cover be taken into account.
Now examine the basic data provided by airborne-radar studies into the characteristics of backscattering from the main types of the Arctic drifting ice.
As indicated in [70], the nilas ice images take up a considerable range of brightness. The swing of fluctuations of the mean values of the nilas-scattered radar signal intensity is between 15 and 20 dB and over (see Fig.4.2a). In this context the variations in the normalized radar cross section of nilas ice go beyond the interval of changes in absolute values of typical for the main types of marine ice. Therefore it is reasonable to make measurements at early ice formation stages. In this case the areas to be explored are determined from the visual observation data and confined to the nilas extend zones.
0σ
The radar imagery of nilas ice acquired by the "Analog" SLAR during the autumn period is shown in Fig.4.3. The radar signal intensity is seen to undergo certain changes virtually over the entire image brightness interval. The results from ground processing of the above image indicated that the swing of intensity fluctuations came up to 20 dB in a sector of angles . 00 6020 ≤≤θ
The variations in the mean values of radar signal intensity are observed to occur in the ice sheet formation zones. This process may be accounted for by the following situations. According to the statements outlined in Chapter 1, when there is no layering the micro relief of the upper surface of nilas consists of small irregularities, which are less than the nilas total thickness, whereas the micro relief elements are formed by the action of large-scale sea roughness components. The afore-mentioned components may be of ripple nature or induced by the wind field above the nilas-covered ocean. In real conditions the temperature of the nilas upper boundary is sufficiently high and is weakly dependent upon the ambient temperature (see §1.3, Fig. 1.14). Here the effective values of the refractive index and specific attenuation are equal to n=3.2 and N=10.5 dB/cm respectively [206]. In this case the process of scattering by inhomogeneous nilas stretches can be described by the selective scattering model that had been previously used to describe the scattering properties of the sea surface [8]. As seen from [7], the value of the nilas normalized radar cross section at angles different from the vertical ones is given as:
)(),()(2.
0 Λ≈r
SF θεθσ , (4.4)
It is also a matter of general knowledge that in real conditions the nilas surface may be covered with a brine film. If this film is present on the ice surface, the spectral density of small-scale surface roughnesses components tends to diminish, whereas for a sufficient film thickness, the high-frequency surface spectrum components are expressed as
0)( →Λr
S . The variations in 2.
),( θεF are insignificant at and
, which are typical for nilas and brine respectively [54, 82]. Therefore, the fluctuations of nilas-scattered radio signal intensity may be primarily related to the spatial
i7,310.
+=ε
ip 4041.
+=ε

233
inhomogeneity of )(Λr
S .Note that it is precisely the brine-containing film on the surface that bring about the variations in the brightness temperature of nilas [207, 208].
Under natural conditions a certain number of areas having a different spectral roughness density may be present within a resolution element. In this case, as the radar sensing data are being interpreted, a phenomenological model can be used to describe the radio wave scattering by the inhomogeneous sea surface [209].
In terms of these notions, the intensity of nilas-scattered radio signals will be dependent both upon the intensity of returns from different areas and upon the relationship between the resolution element and the dimensions of brine film-covered areas. According to the above model the peak intensity values will correspond to the returns from the brine film-free surface areas whose dimensions are greater than a resolution element. The normalized radar cross section of these areas will be governed by the value of the dielectric constant of ice and by a typical spectrum of the small-scale surface roughnesses.
For undeformed nilas brine film-free areas under natural conditions, it may be assumed that the relative micro roughness spectrum exhibit a slight variation with a growing ice mass. It should be pointed out that basically the thermal factors at negative temperatures typical for the autumn-winter period have the certain effect on desalination of the ice upper layers. Owing to this the variation in the normalized radar cross section of nilas ice whose surface is free from the brine film may be attributed to the change of its permittivity.
Although a limited amount of a priori information is scanty and does not allow describing all possible situations that may arise during airborne radar experiments under natural conditions, it was quite possible (with the assumptions already made) to determine the normalized radar cross section values typical for nilas whose surface was free from a brine film (see Fig.4.4). As far as this particular instance is concerned, in processing the en-route records the mean signal intensity values were determined at the interval
, whereupon the derived values were averaged within the realization limits. This particular interval of values was selected in terms of the possible variations in
]63.0,[maxmax MM JJ
ε of nilas ice. Specifically, it follows from (4.4) that at a fixed angle in sector of we have: 00 7010 ≤≤θ
63,0)(
)(
)(
)(2
1
.
2
2
.
1
.2
.
≈≈
ε
ε
ε
ε
F
F
J
J (4.5)
Here use is made of the effective values i7.397.91 +=ε and i7.18.42 +=ε which were taken from the measurements described in [55].
Of high importance is the analysis of variations in the normalized radar cross section of autumn and winter ice in the course of its growth. Considering the results from this analysis, the normalized radar cross section data on nilas and young ice are presented along with normalized radar cross section data on young and first-year ice..

234
а) b)
F ig .4.3. Radar image of nilas ice (a); the interpretation map of measurement area (b); * - nilas

235
Fig .4.4. Angular dependences of the normalized radar cross section for ice of autumn and winter origin. Data are acquired by the "Analog" SLAR. 1 – nilas; 2 – young ice; 3 - thin first-year ice; 4 – thick first-year ice
In contrast to the processes occurring in the young and first-year zones where the
ice sheet is being formed, the variations in the mean values of radar signal intensity are generally within 10-12 dB. An exception is made to the areas with new nilas-covered cracks or with open water. In this case the intensity of returns (as was previously shown) is determined by the value of )(Λ
rS and may be higher or lower than those from adjacent ice
cover areas. Fig. 4.5 shows the radar imagery of young ice and the synchronous en-route
recording ( ), which were acquired from the "Analog" SLAR during the winter period. On the above image a contrasting feature is a series of new cracks with open water or nilas whose surface is covered with a brine film. Within the area to be examined one can observe the large-scale variations in the scattered signal intensity. The combined examination of the above imagery and the en-route recordings reveals a comparatively inhomogeneous areas in which additional averaging can be performed not only to enhance
040=θ

236 an accuracy of the normalized radar cross section evaluation but also to allow for the effect of inhomogeneities resulting from the ice cover deformation (the processing procedure is not extended to cracks, fractures, etc.).
b)
F ig .4.5. Radar imagery of young ice - a; b – synchronous en-route record of
radar image column in ssl (signal sampling level) marked off by arrows
The radar images of first-year ice are shown in Fig.4.6. The thin and medium first-
year ice is shown in Fig.4.6a, 4.6b. One can distinguish the new hummocking zones and the cracks with young ice (light tone). In addition, the dark-tone image areas of thick first-year ice (Fig.4.6c) correspond to relatively smooth ice cover areas; the lighter areas represent the hummocking zones at the homogeneous field boundaries. By making a comparison between the images of thin, medium and thick first-year ice one is bound to notice the distinction of the texture of the above-mentioned ice (shown in radar images).
Meanwhile, the analysis of remotely sensed data on the first-year ice [70] suggests that although the image signatures tend to change in going from one age gradation to another, it appears a rather challenging task to determine a particular age of ice. Therefore the zone of measuring the characteristics of first-year ice backscattering was selected mainly in terms of ice reconnaissance data whereas data processing was accomplished within the homogeneous areas as shown by the imagery.
The generalized measuring data on the normalized radar cross section of autumn and winter sea ice are given in Fig.4.4 [63,210,211]. It is seen that, as the ice thickness grows, the normalized radar cross section tends to diminish (here one should bear in mind the effect of the brine film on the results of remote sensing of nilas).

237
а) b) c)
Fig.4.6. SLRAR images of first-year ice; a - thin first-year ice; b – medium first-year ice;
c – thick first-year ice
In evaluating the accuracy of normalized radar cross section measurement (see Fig.4.4) a SLRAR absolute calibration error is not allowed for. When comparing the measuring data provided by one and the same equipment, this particular error may be regarded as a systematic one. Therefore, taking account of the absolute calibration error results in changing the origin of reference scale of the normalized radar cross section absolute values. The measurement accuracy thus obtained accounts for the fact that, as one age gradations changes over to another, the range of normalized radar cross section values overlap. So there is good reason why it is difficult to interpret the images of autumn and winter ice at the transition growth stages and to determine the age of first-year ice as reported in [70].
The most widespread type of drifting sea ice in the Arctic is the multiyear ice. As noted in Chapter 1, the physical-chemical properties of multiyear ice are closely related to the cyclic action of thermal factors. The summer melting processes that occur on different macro-relief elements are known to be irregular. For instance, snow melting in puddles is more intensive than on even areas [51]. On further freezing, the texture of upper layers of multiyear ice is highly inhomogeneous. These layers exhibit numerous air inclusions, interlayers of different-in-density ice, etc. [45]. The inhomogeneities of the layer structure are also distinguishable on the radar images of multiyear ice [70].
Moreover, multiyear ice massifs show up cracks and fractures covered with ice of autumn and winter origin. These formations can be easily identified on a radar image with regard to significant contrasts of radar returns from multi- and first-year ice. This is exemplified by the images shown in Fig.4.7. The dark-tone areas are for the zones with first-year ice cover, and a crack observable in the middle portion of the image (Fig.4.7b) is covered with young and first-year ice.
At the same time the imagery reveals the variations in intensity, which may possibly be related to the spatial inhomogeneity of the multiyear ice structure. It is possible that the spatial inhomogeneity of multiyear ice-scattered signal should be taken into

238 account using semiautomatic (interactive) radiophysical data processing techniques (some aspects of such an approach to integrating the remotely sensed data on the Earth environment are discussed in [212]). In this instance, a spectral attention may be focused on some imagery section of interest and the homogeneous-in-brightness areas are then selected, within which subsequent processing is carried out.
The results from measuring the normalized radar cross section of multiyear ice are shown in Fig.4.8. It is seen that the variations in the normalized radar cross section of multiyear ice in winter are between 4 and 6 dB. A comparison between dependences for the first- and multiyear ices (see Fig.4.4, 4.8) confirms the fact that radar contrasts are stable in a sector of incidence angles of . 00 7010 ≤≤θ
The data that had been acquired experimentally from aircraft in different Arctic regions are in fairly good agreement with in-situ ice surface and helicopter measurements [65, 66, 69]. This testifies to the absence of regional dependences in the characteristics of radio wave scattering by the sea ice.
а) b)
Fig.4.7. Radar images of multiyear ice

239
Fig.4.8. The normalized radar cross section values of multiyear ice as a function of the incidence angle. Data provided by the "Analog" SLAR

240 § 4.2 The linkage between the characteristics of microwave radio signals scattered by
sea ice and its physical-chemical and electrophysical properties
As evident from the radar-oriented studies of sea and ocean ice sheets, the analysis of the data already acquired was found to be useful in ascertaining the averaged relation between the normalized radar cross section of the sea ice and its age. At same time the age features serve to generalize, to a large extent, the physical-chemical and electrophysical properties of ice, and do not always give an adequate description of ice cover physical state. Specifically, the normalized radar cross section variations that were observable during remote sensing experiments may be attributed not only to the ice age but also to the change in structural-physical and electrical characteristics. In addition, they are caused by the specific features of the ice cover internal texture.
Some of the theoretical works dealing with the problem of electromagnetic waves scattering by the Earth's ice sheets were analyzed in §1.3. However, it was quite a challenge to make an adequate comparison between the computational and experimental data on backscattering radar cross sections. This can be explained as follows. To make rigorous calculations it is necessary that a series of parameters be assigned, describing the ice scattering properties. These parameters should include: statistics of surfaces; size and shape of volume scatterers and their distribution; characteristics of the functions describing permittivity fluctuations, etc. As far as the most of the ice types are concerned, the amount of these data is rather scanty. Clearly the appropriate selection of these parameters allows one to provide a better insight into particular experiments. Still, considering that the nature of a problem is multiparametrical, the computational results are often found to be far from unambiguous.
Therefore we thought it essential to examine the measuring data gleaned under field conditions using the known scattering models, and in this context the general laws describing the variations in physical and physical-chemical properties during the sea ice growth process have to be taken into account.
The materials presented in §1.3 indicate that there is a considerable difference both in the structural-physical and electrophysical characteristics of sea ice that was formed during the autumn-winter period and persisted throughout one season (nilas, young, first-year ice) and the characteristics of multiyear ice affected by cyclic effects of thermal factors (summer –time melting and subsequent freezing in winter).
The upper section of multiyear ice has an active layer whose texture is salt-free and crumbly. This layer was formed due to freezing-over of the water-saturated snow and has no clear-cut boundary with ice. The active ice thickness is on the order of 50 to 70cm and the size of air-filled pores is about 1cm. Typically, a 10 to 30 thick layer of recrystallized ice is found underneath with randomly arranged air-filled inclusions up to 1 cm in diameter of oval, spherical or filamentous shape. The above layer is then smoothly goes over to a fibrous structure similar to that of first-year ice [40,42,45,58].
The refractive index of the multiyear ice upper layers shows a gradual increase from n ~1.1 to n ~ 1.8 in the recrystallized ice region, whereas the specific attenuation N~0.01-0.1 dB/cm, and rises slightly in a layer bordering recrystallized ice (see Fig.1.20b) [58]. The typical penetration depth is on the order of 1.5m over the X-band and can be compared to a total ice thickness [58,59].
In view of the above-mentioned features of structural-physical properties of multiyear ice, the quantitative estimates have been made of normalized radar cross section angular dependences over the frequency range of 9 to 17 GHz. The calculations were made using the expressions for the coefficient of scattering by an infinite randomly inhomogeneous medium. These expressions were derived in a Born approximation with the Gaussian functions of permittivity correlation [83]:

241
2.
0
0222
102
0
232410
)cos(
cos4)41(2
cos)(
θε
θεθδσ ε
kd
kdrkdJd
rkkR
m
eVV
+⋅
+= , (4.6)
where , 2/122210 )sin( θkkd −=
λπ2
=k , λεπ /2.
1 =k , r is the inhomogeneity
radius; εδ is the dimensionless parameter. The calculated curves are in a fairly good agreement with experimental relations of
[65] and, to a certain extent, coincident with the data from the normalized radar cross section measurements of multiyear ice, which were acquired by the "Analog" SLAR. Under these circumstances the parameters of the model
)(0 θσ
i005.06.1 −≈ε (which were used in calculations) and a typical size of inhomogeneities mmr 2≅ fit in with the general insights into the structural-physical and dielectric properties of multiyear ice [40,42,45].
In contrast to the multiyear ice sheet that was formed over the autumn-winter period, the presence of a pronounced upper boundary is typical. This particular boundary is clearly discernible on the vertical distributions of density and salinity as well as on corresponding dependences of the refractive index and specific attenuation (Figs 1.3.3, 1.3.4, 1.3.7a). The dielectric properties of the above ice cover types are largely dependent upon the liquid phase content (brine-filled cells) in the ice thickness. The brine-filled cells have a shape of elongated vertical cylinders 0.05-0.1mm in diameter. In this case one can observe both the isolated cells up to 1cm long and the brine-filled capillaries communicating with water. The volumetric content of the liquid phase for the young sea ice and nilas comes up to 50% and decreases to 2-5% in the upper first-year ice layers. Besides, the ice thickness has air inclusions (air bubbles) formed both from the dissolved-in-water air on freezing and due to brine drainage from the upper layers of ice. The sizes of air inclusions are generally comparable with that of brine-filled capillaries [39, 42, 57].
The radio wave penetration depth defined as )2/()( ε ′′πε′λ=δ at X-band is equal to ≈δ 0.5cm for the young ice and nilas and goes up to ≈δ 5-10cm for the first-year ice.
Thus, in describing the scattering properties of briny sea ice formed during the autumn-winter period it is necessary to tackle an issue of scattering by a limited randomly inhomogeneous medium having rough boundaries. The volumetric inhomogeneities in a layer of ice are primarily are due to the brine-filled cells and air inclusions. The diameter of these inhomogeneities is considerably less than a radio wavelength while their concentration is relatively high and varies substantially between 2-5% and ≅ 50%. The rigorous solution of the problem of radio wave scattering by such media leads to grave problems. Therefore when analyzing the aircraft experimental data it was expedient to focus on those parameters that are most adequate in specifying scattering parameters. This strategy allows getting a better insight into the experimental data that are available.
As noted above, the type of the angular dependence of the normalized radar cross section of a limited medium with a volumetric absorption and randomly rough boundaries are critically dependent upon the absorption in a medium [75,78-80].
The computational data cited in [75,79] are clearly indicative of the fact that with the layer absorption factor in a layer 32 −≥Lγ the scattering mechanism is mainly governed by the permittivity of a layer and the upper boundary roughness. The afore-

242 mentioned values of attenuation factor are typical for the sea ice that was formed over the autumn-winter period of the year [54,214]. In this context the ice thickness that is responsible for scattering is found to be smaller than a total ice thickness and can be compared to the X-band wavelength.
Meanwhile, the ice upper layers are observed to exhibit the volumetric inhomogeneities of permittivity. The influence of these inhomogeneities upon the scattered radio signal characteristics can be taken into account by introducing effective surface roughness. In this instance, the scattering properties of real ice will be described by a mean value complex permittivity of a layer responsible for scattering as well as by the parameters of effective roughnesses, which allow for both the volume inhomogeneities and the upper boundary irregularities [215-217].
Under field conditions the small-scale roughnesses of the topmost ice surface are generally observable in the undeformed areas of sea ice floes. Moreover, considering that the penetration depth of electromagnetic radiation is less or, at least, comparable to a radio wavelength one may assume that the scattering characteristics are most dramatically affected by the upper layer inhomogeneities. Additionally, the extent of permittivity variations in the plane of ice growth will be relatively insignificant. For a small spectral density of effective roughnesses the scattering process can be considered within the scope of the small-perturbation analysis [8]. For angles θ other than the vertical ones, the normalized radar cross section is defined as [8,85]:
)(),(cos4)(2.
440 Λ=r
effSFk θεθπθσ , (4.7)
where , and factor θsin2krr
=Λ2.
),( θεF is determined by the relations:
for horizontal polarization:
22
.2
.2.
)sin(cos
1),(θεθ
εθε−+
−=HHF , (4.8)
for vertical polarization:
22
.2
.
.
2.
2.2.
)sincos(
)sinsin)(1(),(θεθε
θεθεεθε+
−+=VVF (4.9)
The typical effective roughnesses spectra that determine the scattering in terms of perturbation analysis are generated even at an early ice formation stages. This is because the depth of electromagnetic radiation penetration for the young ice and nilas is on the order of 0.1 to 0.2. An increase in the spectral density of effective roughnesses can be taken into consideration using a two-scale model [8] and the techniques proposed in [91,218].

243 However, as the penetration depth δ increases slightly and the character of angular dependences (§4.1, Fig. 4.4) do not undergo any substantial changes with growth of ice, we will examine the problem in hand using the small perturbation method for undeformed areas of the ice cover.
)(0 θσ
Based on the above considerations and in view of (4.6), (4.7), we have calculated the normalized radar cross section of the sea ice of autumn and winter origin. The effective roughness spectra needed for calculations were assigned a power function of the form:
( ) neff CS −Λ⋅≅Λ (4.10)
and were then computed from experimental relation of that was derived during the airborne radar measurements of nilas (see the upper curve in Fig.4.4). At the same time the possibility to determine the spatial spectrum of roughnesses and surface permittivity was analyzed in terms of the measurement data on angular and frequency dependences of the normalized radar cross section according to the two-scale model with due account of the data given in [90,219].
)(0 θσ
The calculation results at and the power index n=2 are shown in Fig.4.9. Ibidem the experimental data acquired from an airborne laboratory are given for comparison. As the computations were performed, use was made of sea ice permittivity data (see [53,54,58,207]); for nilas -
2106.1 −⋅=C
i7.310+=ε& ; first-year ice - i16.03.3 +=ε& . The value of i14.07.1 +=ε& was obtained from the measurements [58] for a layer of frozen snow and first-year ice.
As evident from Fig.4.9, the computational results are in good agreement with experiments, which confirms the validity of the above assumptions and provides a proper insight into the normalized radar cross section variations that are observed in remote sensing experiments with ice of autumn and winter formation. Starting with the very formation of nilas and ending with its thickness of cm7030 −≥ , which is typical for thin
first-year ice, the permittivity varies between ≈.ε 10 and ≈
.ε 3.3, thus leading to a
decrease of by 6 to 8 dB. Subsequently, as the thickness increases, the dramatic changes of ice permittivity in winter are not observable. Meanwhile, as indicated in §1.3, the nilas and young ice are normally free from snow cover, whereas the snow cover thickness on first-year ice ranges between 3-5cm and 20-30cm [51,52]. Besides, totally bare ice is found in the Arctic. Since the permittivity of snow is less than that of ice, the snow cover is a matching layer, which leads to a reduced effective permittivity of snow-covered first-year ice [209,220]. Thus, variations in the normalized radar cross section of first-year ice may be caused about by a matching influence of the snow cover. This is confirmed by calculations (see curve 3 in Fig.4.9) and by the spatial fluctuations of spectral characteristics of effective roughnesses. Of great significance is also a comparison between the results that were achieved and the known measuring data on the sea ice backscattering characteristics over the microwave range.
0σ
Fig.4.10 presents the data on surface measurements of normalized radar cross section of snowless first-year ice at 9 and 17 GHz [67] and the computational data obtained in accordance with (4.2), (4.4), (4.5). As in the case of bare first-year ice (curve 2, Fig.4.9), the calculations were made at i16.03.3 +=ε& and n=2. The magnitude of coefficient C in (4.5) was selected as . The calculated curves give a fairly good 21064.0 −⋅=C

244 description of the experimental dependences [67] at frequencies between 9 and 17 GHz. It should also be stressed that the data acquired by the "Analog" SLAR (curve 2 – Fig.4.2) and the measuring data [66] obtained at 9 GHz (curve 2 – Fig.4.10) coincide to an accuracy of constant factor C. The observed distinction is equal to 3-4 dB and exhibits a systematic nature, which may by related to the errors in absolute calibration of equipment.
Fig. 4.9. The calculated curves of the normalized radar cross section for vertical polarization (VV) at i7.310+=ε& - 1; i16.03.3 +=ε& - 2; i14.07.1 +=ε& - 3; and the data provided by the "Analog" SLAR: о - nilas; - thin first-year ice; - ∆thick first-year ice

245
Fig.4.10. The calculated curves of the normalized radar cross section for vertical polarization (VV) at 17 GHz - 1; 9 GHz - 2; and the measuring data on the thick first year ice [66]: ∆ - 17 GHz; о – 9 GHz.
Thus, the scattering properties of sea ice formed during the autumn-winter season can be explained in terms of using the effective roughnesses which allow for the irregularities of the upper boundary and the inhomogeneities of permittivity of upper ice layers. The angular dependences of the normalized radar cross section of undeformed ice cover areas in the frequency range of 9 to 17 GHz and in a sector of incidence angles of
°≤≤° 7010 θ are adequately described by the power-low spectra of effective roughnesses using the small-perturbation method. The variations in the normalized radar cross section, which were observed to occur in the ice growth process, are primarily due to a decrease of permittivity in the upper layers of ice. The effective permittivity, in its turn, is a function of temperature and ice salinity. The above statements testify to the fact that there is a strong possibility of using radar data to determine the temperature and salinity of the first-year ice.

246 § 4.3 Methodical features of thematic processing of the spaceborne SLR information
on the ice sheets
At present one of the most essential problems that need to be resolved is the study of natural ice using the special-purpose techniques and dedicated tools for radar remote sensing of the Earth's natural environment. The vast expanses of polar seas, oceans and inland water reservoirs get covered with an ice layer of different thicknesses on freezing the sea water.
As noted above, the practical remote diagnostic applications like the timely acquisition and delivery of hydrometeorological data for safe navigation, studies of weather events, investigations into the influence of the climatic variations on the ice sheet state of the Arctic and Antarctic zones, etc. require that radar data be acquired and processed as promptly and efficiently as possible. The navigation conditions in the ice-covered regions are closely linked with the ice sheet state in those particular areas. Therefore there is a strong need to ensure a sustainable supply of current and prognostic ice information at a regional level. In this context the on-line radar imagery processing intended to assess the ice sheet and sea surface conditions directly from the radar images acquired at the ground-based data reception points is of particular interest.
The evidence provided by the above-described analysis of properties of radio wave sea ice scattering suggests that the normalized radar cross section can drastically change depending upon the ice age, its physical-chemical and electrophysical properties, etc. Due to this, the spaceborne SLR images contain a considerable amount of information on the state of an ice cover and its texture.
Unlike the sea surface, which is a dielectrically homogeneous medium whose scattering characteristics are basically governed by the statistical properties of the surface only, ice is a highly complicated system. The dielectric properties of ice are dependent upon the formation conditions, temperature, salinity, age (thickness) and vary appreciably in time. A diversity of physical properties and the difficulties in solving the problems of radio wave scattering by ice covers does not allow devising a unified model for an adequate description of scattering processes. Therefore, the procedures for interpreting the results from remote sensing of ice are based upon generalized experimental data.
The methods based upon the generalized data of experimental studies are the most widespread in terms of interpreting the remotely sensed data extracted from space [63, 137, 211].
Many years of aircraft radar studies that had been carried out at the Institute for Radiophysics and Electronics of the NAS of Ukraine and the Kalmykov center for radiophysical sensing of the Earth of the NAS and NSA of Ukraine (Kalmykov CRSE) resulted in amassing the bank of data on the characteristics of returns from the sea and ocean ice covers in different Arctic and Antarctic regions as well as in the basins of mid-latitude freezing seas at different ice formation stages. This research and application experience was actually needed to develop space- and airborne systems and data interpretation procedures.
The generalized plot of the normalized radar cross section versus ice age, which was constructed using the data given in [65,66,69,211,220], and the results from field experiments conducted at the IRE of the NAS of Ukraine and the Kalmykov CRSE are shown in Fig.4.11. The dependence shown below is presented in the general form and indicates the variation of the normalized radar cross section with sea ice age and f the basis for the spaceborne data interpretation techniques [171].

247
Fig.4.11. The generalized dependence of the sea ice normalized radar cross
section upon the ice age (thickness)
In terms of the ice formation singularities and the temperature conditions, these data can likewise be utilized to interpret the radar surveying results in the freezing areas in midlatitude inland seas, for instance, in the Azov-Black Sea basin.
As indicated above, the procedures for radar imagery qualitative analysis are effectively utilized during the ice reconnaissance missions involving the use of airborne SLARs [70]. The decoding signs of sea ice (which were discussed in [70]) and the interpretation methods based upon comparing the acquired images to reference ones typical for a particular ice cover type can be used in interpreting spaceborne SLR data.
Besides, both the generalized data (Fig.4.11) and the decoding signs [70] do not cover all kinds of situations that occur under natural conditions during observations. Therefore, as radar images are being interpreted, it is necessary to draw upon some additional information (specifically, the data on hydrometeorological condition in the area to be surveyed, additional meteorological data, etc.) [49,70].
Moreover, using the spaceborne SLRs makes it possible to survey one and the same areas of the ice sheet. This technique can be used to process not only the incoming data by means of the ice sheet growth model [221], but also the data on the normalized radar cross section variations with ice growth, which were collected during the field experiments.
Considering the above reasoning we think it fit to focus on whether it is really feasible to resolve the problem of remote diagnostics of the Earth ice sheets by means of spaceborne SLRs.

248 § 4.4 Remote sea ice diagnostics using spaceborne SLR facilities
The remote sensing diagnostics is aimed at handling numerous practical issues
pertinent to acquiring the appropriate hydrometeorological data for safe navigation, making climatic and operating mode studies, etc.). These issues can be resolved through a highly efficient data extraction and reception procedures. An on-line radar image processing is of interest in terms of assessing the conditions of ice floes and sea surface right from the radar images downloaded to ground-based data reception points.
Now let us consider a number of examples that might well be illustrative of how the Earth ice sheet remote diagnostics problems can be resolved using the SLR of the "Cosmos-1500"/"Ocean"/"SICH" type.
A considerable research and application advantage is offered by the baseline studies into the spatial distribution of sea ice thickness in the winter-time. As noted above, the relationships between the normalized radar cross section of sea ice and its age (thickness) can be used to resolve the above problems using the space-based radar facilities.
Fig.4.12 shows the radar imagery of the Kara Sea and part of the Arctic areas. The radar image display a vast area covered with floes of different ages. Some imagery portions are distinguishable in their brightness and, consequently, in the normalized radar cross section. Based upon the generalized relation between the normalized radar cross section of sea ice and its age and taking into account the specific aspects of hydrometeorological events in the area under study, an ice sheet distribution map can be compiled.
The schematic map is laid out after the imagery was examined (see Fig.4.12a), and the spatial distribution of the ice floe age is shown in Fig.4.12b. As evident from the analysis of the radar images, the obtained results are, in general, consistent with the data on ice distribution over the second ten-day period of February 1985 (Fig.4.13). This serves as a sound argument for the feasibility of using the spaceborne SLR data to determine, at least, 3 or 4 ice gradations and compile the general ice condition maps. Besides, a series of successive observations enables one to explore dynamic processes as well, and this is of crucial importance in making ice forecasts. The ice condition maps were presented by the Arctic and Antarctic Research Institute in Saint-Petersburg (Russia).

249
а) b)
Fig.4.12. Radar image of the Kara Sea and part of the Arctic region, acquired by the "Cosmos-1500" on February 20, 1985 (a): (b) schematic map of the area under study

250
Fig.4.13. Ice conditions as recorded over the second ten-day period of February 1985

251 Fig.4.14 gives an example of using the EOS "SICH-1" SLR to study the spatial
distribution of the sea ice in Alaska and the adjacent areas of the Arctic Ocean. The combined image shows the vast area of different-in-age ice sheets. In studying this area one can single out the zones of multiyear ice, first-year fast ice, hummocked first-year ice and flaw polynya.
Fig.4.14. Combined image of the Alaska region acquired by the EOS "SICH-1" SLR (orbit 1759), (orbit 1949), 12.01.96 (orbit 1971)

252 The regular observations of ice conditions make it possible to determine the drift
vector of individual multiyear ice fields and to track the dynamics of multiyear boundary variability [63,210]. Fig.4.15 shows the images of the Kara Sea and multiyear ice in the North Pole area. These images were acquired on November 12, 1983; December 12, 1983 and on March 14, 1984. The boundary of multiyear and first-year ice is clearly observable. Fig.4.15a shows a picture of a gigantic multiyear ice field in the region of the Schmidt Island. The typical extent of the floes is 80km. Referring to Fig.4.15, both the multiyear drift of this ice field and the variability of the multiyear ice boundary can be effectively traced. As an example, the multiyear ice boundary moved northward through a distance of 400km, whereas the multiyear ice field had been displaced north-westward from the Schmidt Island by 300km. As will be apparent from the data of long-run observations (see the images in Fig.4.15), the average drift velocity of the pack ice boundary is around 6 cm/s. The multiyear ice drift vectors recorded from November 1983 through March 1984 are shown in Fig.4.15d. Since it is possible to determine the drift velocity of ice covered areas and ice formations, the spaceborne SLRAR data may well be used in real-time construction of the currents and ice drift maps, which is in fact critical for the Polar Regions studies.
а) b) c) d)
Fig.4.15. Radar images of the Kara Sea and the multiyear ice in the Arctic basin acquired by "Cosmos-1500". a) - 25.11.83, b) - 12.12.83, c) -14.03.85, d) – the location of the first-year and multiyear ice boundary
Using the spaceborne radar-return data appears to hold the greatest promise in
terms of making regional studies into the specific features of the sea ice regimen of the Arctic seas. Fig.4.16 presents the imagery of one and the same Chukot and Arctic Ocean region. The images were acquired over the autumn period with a difference in time of about one year. A comparison between the radar images (see Figs 4.16a-4.16c) suggests that the ice conditions in the Longa Strait are widely different. The image (Fig.4.16a) shows quite a discernible texture of multiyear ice that extended up to the Chukot coastline in the autumn

253 of 1983. In September 1984 the boundary of the multiyear ice was lying north of the Wrangel Island (Fig.4.16b), and in September 1985 the multiyear ice of different consolidations could be observed. The examples given in Fig.4.16 sustain the fact that it was possible to explore the variability of ice conditions at regional level whereas during the regular observations, similar data can be employed to derive long-term forecasts.
а) b) c)
Fig.4.16. Radar images of the Chukot and the Arctic Ocean regions acquired by "Cosmos-1500". a) - 24.11.83, b) - 14.09.84, c) -19.09.85

254 Of prime importance is the information on the ice-water boundary. In general, it
does not present any challenge to specify the multiyear ice boundary during the cold season of the year (see, for instance, Fig.4.16c). However, it is somewhat difficult to determine the sea-ice boundary in the open basin when the sea state is well developed. The radar contrasts at the ice-water interface may appear to be ambiguous. Therefore, in the radar image interpretation the ancillary data, specifically, a typical roughness structure, satellite optical information, in-situ measurements, etc., have to be taken into account.
An example of observing the ice-water boundary in the Norwegian Sea is shown in Fig.4.17.
a) b) Fig.4.17. а) synchronous radar and optical images of the Norwegian Sea (acquired by EOS"SICH-1", 02.10.96); b) the thematic processing data

255 In sequential radar surveying from space the information on the position of an ice -
water boundary can be used to check the distribution zones of drifting ice in the Arctic basin.
Apart from the study of the Arctic Sea ice, the use of spaceborne radar facilities attracts a good deal of attention in terms of inquiring into the features of the Antarctic ice sheet. The morphological structure of the Antarctic drift ice may differ from the respective structure of the Arctic ice cover, the reason being the peculiar nature of ice formation processes. Typically, the ice formation and ice build up processes in the Antarctic occur with violent winds and heavy snowfalls, and because of these events there is the likely-hood that a frozen snow-sea water mixture may be formed in the upper layers. Furthermore, it is not improbable that the ice floe surface will descend below the sea level under the weight of the snow cover, thereby resulting in percolating the sea water through the ice into the snow thickness. As a consequence, the freezing-up process entails the build up of infiltration ice layers that may occasionally be formed over the autumn-winter period [221].
Basically, the impact the Antarctic ice structure characteristics produces upon the properties of radio wave scattering by these types of formations has not been clearly understood so far. However, as the analytical treatment of spaceborne SLR–derived images suggests, the space radar information may well be put into use in remote diagnostics of the Antarctic drift ice [63,81,171,211].
Fig.4.18 gives the examples of the Antarctic peninsular area that were imaged in the winter-time period. As seen in the Figure, the ice extent border shows a fairly high contrast. Besides, the variations in the radar return intensity are observable, which may be due to the differences in physical and physical-chemical properties. Note that this is also a contrast boundary between the shelf glacier and the sea ice.
Fig. 4.19 presents the data from surveying the Antarctic peninsular region in the summer of 1996. Through examination of the radar-produced picture and the synchronous optical image, it is not difficult to highlight the sea ice extent in this particular area.
The space-based radar facilities offer an appropriate potential for determining the spatial structure of the sea ice in the Arctic and Antarctic polar regions and can be utilized to maintain shipping services therein. In this context, of particular significance is the spaceborne SLR capability to detect large-scale leads and fractures in the sea ice floes [171,211]. As an example, the image of the Wrangel Island area (Fig. 4.16a) exhibits quite discernible leads and cracks in the multiyear ice sheet (dark bands). These leads filled with young ice or water are 3 to 5km wide and exhibit a sufficient stability. This kind of information on the existing cracks was proved to be useful in piloting a caravan of vessels towards the port of Pevek in October, 1983.
Yet another goal of ice sheet exploration is to monitor the formation and drift of icebergs that are broken away from on-ground and shelf glaciers in the Polar Regions, particularly in the Greenland and Antarctic areas.
A possibility to detect icebergs using radar facilities is primarily associated with the peculiar features of radio wave scattering by ice sheets. The influence of the internal texture of ice covers on the radar return signatures has been discussed in [171,223,224]. We also note that the Antarctic shelf glaciers and the glacier cupolas on the islands of the Arctic basin offer high normalized radar cross section magnitudes (see the light-colored patches on the radar image). Owing to this they can be reliably identified against the background of other types of surface [81,210,211,223].

256
а) b)
Fig.4.18. а) synchronous radar (left-hand side) and optical images of the Antarctic peninsular (acquired by the EOS "SICH-1", 17.10.1996); b) results from thematic processing
a) b)
Fig.4.19 а) synchronous radar (left-hand side) and optical images of the Antarctic peninsular (acquired by the EOS "SICH-1", 06.02.1996); b) results from thematic processing

257 The radio imagery of ice covers, which was acquired in different Arctic and
Antarctic regions during the autumn-winter period, is also included for illustration only. Fig/4/18 displays a contrasting picture of the Antarctic shelf glacier and in the image of Fig.4.20a, 4.20b one can clearly see the Greenland ice cover. The identical degree of contrast is likewise observable in Fig.4.15 where the glacier cupolas on the Novaya Zemlya and Schmidt Islands are easily discernible. The above examples that have been supplied are yet another evidence that the Antarctic shelf glaciers and the ice cupolas on the Arctic islands can be identified during the autumn-winter period.
Fig. 4.20 shows the imaged boundary of drift ice areal extent and the ice structure as well as the ice sheet texture close to the Greenland eastern coast. At the same time some ice formations of 3 to 10km in extent set off from the drift ice mass (see Fig.4.20) can be identified as ice islands (icebergs). The normalized radar cross sections of these formations are far greater than that of surrounding ice.
а) b)
Fig.4.20. Radar image of the Greenland region 29.11.83 (a) and 29.12.85 (b) (acquired
by the EOS "Cosmos-1500")

258 The drift of the gigantic iceberg near the Antarctic coast can be traced on the
imagery shown in Fig.4.21a, 4.21b. The movement of this iceberg is sketched in Fig. 4.21c.
а) b) c)
Fig.4.21. Radar images of the Antarctic areas for 08.12.83 (а) and 05.01.84 (b) (acquired by the EOS "Cosmos-1500"); (c) – schematic map of the area
In addition to the studies of the ice covers on geophysical scales, the most efficient
procedure is the use of the data extracted by the surveillance SLR of "SICH-1" type to tackle the regional issues pertinent to hydrometeorological support of navigation in the mid-latitude freezing seas. The data from space-based SLR surveying can also be employed to monitor the ice information processes in the Black and Azov Sea basins. Fig. 4.22 presents the radar images of the territory of Black and Azov sea basin. They were acquired

259 by the EOS SLR "SICH-1". The thematic processing data are given therein, enabling one to trace the dynamic of changes in ice conditions. This particular information may certainly be highly essential for maritime navigation in the Azov Sea basin.
Initial data 18.02.1996 24.02.1996 01.04.1996
Thematic processing results
Fig.4.22. The dynamic of variations in the ice conditions in the Azov Sea basin according to the remotely sensed EOS SLR "SICH-1" data
Thus, the spaceborne remote sensing surveillance radar systems can be effectively used to address a series of critical problems associated with remote diagnostics of ice sheets, specifically:
- determining the age characteristics and the spatial structure of drift sea ice; - studying the dynamic of sea ice (including the variability of multiyear ice and
determining the speed of ice floes and the direction of their drift; - determining the boundary of the sea ice areal extent; - detecting cracks and fractures in multiyear ice; - detecting big-size iceberg, ice-covered islands and multiyear floes.
The on-line analysis of spaceborne SLR-derived information permits of tackling
practical issues of hydrometeorological support of navigation in ice-covered regions.

260 §4.5 Particular features of ice cover remote sensing by multifrequency radar
techniques
The data gathered from the analytical treatment of radiophysical methods for the Earth's ice sheet exploration from aerospace carriers and many years of operation of aircraft ("Toros", "Nit" [70]) and spaceborne ("Ocean"/"SICH-1", ERS-1,2, RADARSAT, ENVISAT, etc.) systems have clearly indicated that radar techniques for remote diagnosis of ice covers are highly efficient. However, these techniques have a number of limitations such as ambiguities resulting from the interpretation of remotely sensed young ice data. Furthermore, the contrasts of young-multi-year ice boundary, which are observable at X-band, are considerable lower as compared to the corresponding values at the first-multi-year ice boundary, thereby making it difficult to identify a particular type of ice within cracks [211].
The use of multifrequency sensing techniques is one of the ways to increase the performance of radiophysical facilities intended for remote diagnostics. In this context the most promising feature is the integration of X-, L- and VHF- band systems.
Basically the application of the L-band waves to the study of the sea ice is of deeper interest, because the depth of radio wave penetration into the ice thickness is greater than at the X-band. For instance, if the typical values of specific X-band radio wave attenuation ( cm3≈λ ) in the sea ice are equal to cmdBN /22.0 −≈ (depending upon density and salinity), then at L-band ( cm20≈λ ) this attenuation is well below
[213]. cmdBtoN /3.002.0≈The thickness of layers whose absorption is relatively weak and has a certain effect
upon the L-band waves scattering processes may be close to the total thickness of ice. Therefore, as the vertical sea ice texture is inhomogeneous, the remotely sensed data at X-band and L-band wavelengths have a number of essential distinctions.
The normalized radar cross section of sea ice as a function of frequency obtained from experimental data [66] is shown in Fig.4.23. The normalized radar cross section of multiyear ice is seen to increase monotonously with a growing frequency and at a frequency range between 9 and 17 GHz it is by 10 to 14 dB higher than the normalized radar cross section of first-year ice. At a frequency of 1 to 2 GHz the normalized radar cross section of the first-year ice exceeds slightly the corresponding value by 9 GHz and is practically coincident with of multiyear ice. 0σ
The afore-mentioned singularities of the frequency-dependent normalized radar cross section of thick first-year ice and multiyear ice can be related to the following factors. As noted earlier, the relatively high scattering values of the normalized radar cross section of multiyear ice at 9 to 17 GHz are attributable to the effects of volume scattering in the active layers of multiyear ice. The influence of scattering in the above mentioned layers at L-band is insignificant, because these layers have a rather low density, whereas the typical dimensions of inhomogeneities are far less than a radio wavelength (§. 1.3).
In this case the intensity of scattered radio signals will be governed by the electrophysical parameters and statistical characteristics of permittivity fluctuations of ice layers located below the active ones. Yet, as the data provided in § 1.3 indicate, a fundamental difference in the structural-physical properties and vertical distributions of the refractive index of thick first-year and consolidated multiyear ice lying below the active layer is not observable. As a consequence, the normalized radar cross section values of multiyear and first-year ice at a frequency between 1 and 2 GHz may be inherently close to each other. In this case the value of will be dependent upon the statistical parameters of permittivity inhomogeneities rather than upon the ice age.
0σ

261
а)
b)
Fig.4.23. Frequency-dependent normalized radar cross section of sea ice, [66]; 040=θа – first-year ice, b – multiyear ice
The application of the multifrequency sensing techniques aimed at diagnosing the
salt sea ice of autumn and winter origin appears to be quite promising. The spectral characteristics of permittivity inhomogeneities of this ice type may probably have different effects upon the results obtained at X- and L-bands. Although the data on the sea ice inhomogeneity spectra have been virtually unavailable up to now, some definite inferences can be made from the analyzed behavior of structural-physical and electrophysical ice cover parameters and on the basis of general notions about the processes of radio wave backscattering by randomly inhomogeneous media with rough boundaries.

262 As indicated in § 4.1, the intensity of radio signals scattered by the ice of autumn
and winter origin at X-band is dictated by the permittivity and spectral density of effective roughnesses of ice upper layers.
In addition, the data given in § 1.3 indicate that formation of microrelief and permittivity of ice upper layers are largely dependent upon the desalination processes (brine drainage), which occur more intensively on an above-water part of ice. The thickness of this particular part is ( )hhS 2.01.0 −≈ ( is the total ice thickness) depending upon the
ice density. Specifically, the salt sea ice density is
hcmg /9.08.0 −≈ρ [40]. At the early
ice formation stages the height of effective roughnesses of ice sheet upper layers is much less than X- and L-band wavelengths because the ice is water-saturated. Besides, its surface
may be covered with a brine film. Therefore, although the values are high ( 10.>ε ), the
intensity of backscattered radio signals is relatively low. As the ice mass builds up, the thickness of its upper desalinated layer tends to increase, thereby bringing about a growth in the spectral density of effective roughnesses. As this process proceeds, the typical thickness of the surface part comes up to cmhS 31−≈ even at the stage of nilas and gray ice (h~10 to 15cm) and can be compared to an X-band radio wavelength. Since the
permittivity of the upper nilas and gray ice layers remains sufficiently high ( 106.
−≈ε ),
the growth of these types of ice leads to an increased intensity of scattered radio signals. With a further increase of the ice thickness the permittivity of the upper layers decreases and, hence, the radar signal intensity is observed to diminish.
At the same time the thickness of the surface part of nilas and young ice is far less than an L-band radio wavelength and it is precisely for thick first-year ice (h ~ 120cm) the value of is found to be comparable to a radio wavelength. With a weak attenuation of L-band waves, their scattering intensity is governed by the layers with a higher liquid phase content. These layers are located in the underwater part of ice and exhibit slight variations of permittivity with a growing ice thickness. As this process occurs, an increase in spectral density of effective roughness and L-band scattered radio signals, at least, at the stages of young and thin first-year ice (h ~ 70cm).
cmhS 24≈
The examples illustrating the synchronous radio imagery of drift ice (see Fig.4.24, 4.25) are strongly indicative of the critical differences in radar data obtained at X- and L-bands. The surveying operations were performed during the winter season using the airborne multipurpose radar system "MARS" [141], which incorporates L- and VHF-band SARs as well as Ka- and X-band SLRARs.
As shown in the X-band image (see Fig.4.24), separate floes and multiyear ice fields are rather discernible, and the boundary of multiyear ice extent can likewise be set off. In practice it seems next to impossible to single out the above formations when using the data obtained at L-band only. At the same time the variations in the intensity of scattered radio signals whose magnitude runs up to 10-12 dB and up at X-band can be attributed to the specific features of ice texture (i.e. hummocked nature, inhomogeneity of density and permittivity, etc.). Relatively weak levels of radar returns from vast multiyear ice fields at L-band testify to the fact that the spatial structure of these fields is homogeneous. Shown in the top position of the image is the crack covered with hummocked first-year ice. This is clearly evidenced both by the reduced levels of returns and by the higher signal levels at X- and L-bands respectively.

263
а) b)
Fig.4.24. Radar images of the Arctic Ocean in the border area of the first- and multiyear ice (acquired at X-band (a) and L-band (b). 1 – multiyear floes; 2 – cracks with hummocked first-year ice; 3 – cracks with flat first-year ice; 4 – cracks with young ice; 5 – new hummocking zones
In the radar image of the first-year ice the extended cracks covered with young ice
are observable. The intensity of returns from the above type of ice at X-band is significantly higher than that of returns from the adjacent first-year ice areas. However at L-band the levels of returns from these cracks in the corresponding values for the surrounding ice. These formations can be identified as cracks with nilas or young ice. The higher levels of returns from the upper part of these formations (shown in the image) can, in their turn, be due to the compression or hummocking of the ice sheet.

264 When examining the above imagery (Fig.4.25) one can observe the fundamental
differences in the pattern of radio images of identical sea ice and the island's ice sheet. Similar imagery was acquired over different frequency ranges. The observable distinguishing features result from varying depths of probing radio wave penetration into the ice covers. The latter circumstance indicates that the data provided by the synchronous radar surveying operations may be utilized to study both the surface and the internal structure of sea ice and glaciers.
а) b) c) d) Fig.4.25. Radar images showing the region of one of the Franz Joseph Land islands. The were acquired at Ka – band (a), X – band (b), L – band (c) and VHF – band (d)
In addition to this, with the X- and L-band radiophysical facilities being simultaneously used, the ambiguity of interpreting the remotely sensed data on nilas and young ice is precluded. In this instance, some additional information on the first-year and multiyear ice conditions can be obtained [225-227]. What is more, the multifrequency data, if used, enable one to implement the computerized methods for classifying ice covers. The efficiency of these techniques is discussed in [228, 229].

265 § 4.6 Rescue operations aimed at salving the cargo vessel fleet using the data from the
EOS "Cosmos-1500" SLR
One of the most exciting and significant events that enormously impressed the world radar community was the employment of the EOS "Cosmos-1500" SLR. They bring us back to the memorable days of the autumn days of 1983 when 22 ice-bound vessels had to be "pulled out" out of the ice jam in the difficult area off the coast of the Chukot. Never before had the remote sensing community been confronted with so spectacular and productive results achieved by space radiophysics experts in the scientific and engineering practice. The supply ships that carried a huge amount of essential goods like foodstuffs, fuel, etc. to be distributed among the Chukot inhabitants found themselves ice-jammed in early October 1983. The reason why it so happened was a number of unfavorable contingencies. The fact was that the behavior of some top officials and the lack of managerial competence and organizational skills, which was so typical of that period in the USSR occasioned a good deal of muddling and failures that had led to an inexcusable delay in forming and loading the convoy of ships bound for the north of the Chukot area. These operations took longer than planned; they lasted for over a month or so. Just at that time the multiyear ice sheets had unexpectedly shifted southward and further on to the Chukot coast. A traditional sea route in eastern sector of the Arctic Ocean along the northern coastline of the Chukot peninsula was crammed with "heavy" multi-meter thick ice that made it impossible for the convoy to nip through.
In order for the vessels to continue on their way the most powerful atomic ice-breakers and ice patrol airplanes were rushed in from other Arctic areas. Yet the situation was getting increasingly critical with every passing day. The convoy had, in effect, to drift in the heavy ice for more than 4 weeks. The ice-breakers were practically unable to push their way through a huge ice-field. There were several attempts at cracking that "hard nut" by taking, what is said a "running jump". According to some eyewitnesses, the ice- breakers looked very much like "mechanical toys" whose winding clockwork had ceased running. They screw propellers got stuck and then broken as they pressed hard against the ice floes.
The IL-14 airplanes whose routine job was to carry out ice patrolling or monitoring the ice fields at an altitude of 150 to 200 m during the polar nights kept turning their searchlights down upon some small ice-covered areas. The hydrology experts of the Arctic-Antarctic Research Institute had to draw up the maps by hand right aboard the airplanes and the results they obtained from ice patrolling operations were immediately placed in special message bags that were dropped onto the ice-breakers. Unfortunately, these monitoring measures proved to be rather inefficient. They could not specify the cardinal, useful ways of salvaging the distressed vessels. A dreadful, tragical picture was unfolding under the eyes of numerous sailors. The motor ship "Nina Sagaidak" was crushed by ice to such an extent that she sank whereas another motor ship "Kolya Myagotin" was badly damaged. It looked like inevitable wreckage was hovering over the distressed vessels.
The top leader of the USSR and the Arctic Sea Route specialists of the Ministry of the Merchant Marine and the whole nation felt gravely concerned about the destiny of the drifting fleet. The real loss of 22 vessels carrying the cargoes estimated at over 8 billion dollars would be a great tragedy. Should this catastrophe happen, another more complicated problem would have arisen involving the use of airplanes to evacuate thousands of Chukot inhabitants who could hardly endure the severity of the Arctic winter climate. That would also have entailed additional expenses on transporting the local population to the mainland. It seemed like the whole situation was deadlocked. The news coming in from the ice patrolling sources were deplorable with a vengeance. Tens of kilometers of the ice field were lying all around the iced-up vessels, and there was an impression they would never be capable of breaking through.

266 Exactly at that time the expert teams of the DO "Yuzhnoye" (Dnepropetrovsk) and
the Institute of Radiophysics and Electronics NASU (IRE, Kharkov) had set about making arrangements for the planned orbital tests of the remote sensing radar equipment installed aboard the EOS "Cosmos-1500" which was launched into space on September 28, 1983. That first-ever in-house remote sensing complex was designed and developed in a joint effort undertaken by Prof. A.I. Kalmykov and his Ukrainian collaborators who really enjoyed being led by that talented manager. This group included the researchers and engineers of the IRE of the NAS of UkrSSR, the Special DO of the IRE of the NAS of UkrSSR and the special DO of the Marine Hydrophysical Institute of the Same Academy. And what is more important, this complex incorporated the SLR as the key remote sensing tool.
The situation appeared to be rather unusual, if not paradoxical. Just when the cargoes intended for the Chukot inhabitants were at stake and might be lost for ever with the ice-bound vessels being inevitably wrecked and going down in the Longa Strait, the spaceborne SLR – the only device capable of salvaging the distressed vessels during the polar nights – was to be involved in long-term preliminary tests according to the previously endorsed plan. These tests were intended to make sure if the SLR was capable of maintaining a really efficient informative potential, which, unfortunately, most of the remote sensing experts of the USSR had rated as exceedingly poor long before the SLR was put in orbit. These tests were to be carried out to make multiple radar surveys of one and the same proving area of the sea surface close to the African coast being concurrently monitored and checked by ground facilities in a variety of operating modes.
Under these circumstances Prof. A.I. Kalmykov whose activity was strongly encouraged by Dr. V.I. Dranovsky, the main designer of the "Yuzhnoye" DO-3, was falling over himself at that time: he did an incredible thing, i.e. he won a number of top officials to his cause. His keen desire was to cancel the on-orbit testing of the SLR straight away and "re-orient" it towards the distressed area in the Longa Strait. At the same time the remote sensing experts of the IRE NASU did all they could to provide the real-time delivery of remotely sensed data, to get them simultaneously received, handled and interpreted in terms of appropriate radio-physical mechanisms. By then most of the specialists could not boast of high-level expertise in that field.
Thus, a lot of things were done to arrive at a final, wise decision. Of course, one had to go through much trouble before the happy end came. The results were found to be excellent: the initial radar images of that area clearly indicated the way of getting the convoy out of the ice trap. That was originally exemplified by one of the first SLR images (see Fig. 4.26a) of the Longa Strait, which were acquired by the EOS "Cosmos-1500" radar facility.
Shortly after the above images were obtained, the Kharkov radiophysicists who had by then gained a bit of experience with interpreting radar images of sea ice, it became quite clear that, indeed, the area in which the distressed convoy had to drift away near the Chukot peninsula was a vast field of heavy ice. But, as luck would have it, 100 km north of the island of Wrangel, there lay a huge zone of thin young ice (the so-called "polynia"), which was a convenient and easy way for the convoy to move along. Meanwhile the radar images showed the well-defined fractures and patches of ice-free water (canals) in the heavy multiyear ice, which outstretched northward. In other words, they allowed an easy passage to that "polynia" lying close to the island of Wrangel.
As soon as the initial data had been processed, adequately interpreted and made available to the Kharkov IRE specialists, Prof. A.I. Kalmykov who was then in charge of the development work and its practical realization and Dr. A.P. Pichugin, his authorized representative in Moscow, made a fresh attempt to get the leading executives of the "Sevmorput" (Arctic Shipping Route) administration to pay earnest heed to their pressing

267 problems. Nevertheless, those "big guys" who had earlier been informed by some "well-wishers" about the SLR low informative potential seemed to be reluctant to accept the fact that the remotely sensed data had already been at hand and could be efficiently utilized. And it was not until after they dared to utter their explicit threat to address a complaint to the CPSU that things got going. The above management made up their minds to verify the SLR data just on the off-chance. The ice patrolling airplanes that had earlier made regular flights to the distressed area and along the Chukot coastline in an effort to seek out the smallest ice cracks lying on the customary route were sent northward (to an area detected by the SLR) closer to the island of Wrangel. It was a great surprise for the ice monitoring experts (the latter were associated with the pilotage headquarters) to have found that the SLAR data were really faithful and totally reliable.
а
b
Fig. 4.26. а - one of the initial SLR images of the Longa Strait. It is acquired by the EOS "Cosmos-1500" 20.10.83. A large "polynia" (ice-free path) is clearly seen near the island of Wrangel. It is located 100 km northward of the area where the convoy had been nipped in ice. Besides, the fracture to this "polynia" is discernible. b - an interpretation map of the same area. It was constructed from SLR image. Different types of sea ice are noted. A general route of the convoy rescue operations is indicated

268 In fact, the SLR had spotted an area where the young ice was prevalent. Within
several days after that zone had been detected from space, the ice became a bit solidified, but it still allowed a free passage of the convoy. In the meantime a few ice-free channels leading to that zone in the heavy ice were recorded. The convoy had to promptly reverse its general course and moved northward through those channels. The vessels that were closely accompanied by the atomic ice-breakers reached the young ice zone and a few days later arrived at the port of Pevek safe and sound. The newspapers of that distant past ("Izvestia" of 06.11.83 and "Leningrad Pravda" of 16.11.83) carried the reports that seemed to convey the feeling of that boundless joy and great relief the Pevek inhabitants were experiencing when they came out to the shore to meet the rescue ships. Thus, during the first month of the "Cosmos-1500" SLR on-orbit operation the data that radar facility provided were effectively used to secure ship rescue operations. In terms of the financial language, the cargoes transported by the convoy were valued at 8 billion dollars. That amount was 300 times greater as against the total development and launch expenses. In addition, the grim aftermaths the Chukot population might have undergone were forestalled. Indeed, they produced compelling evidence that this particular type of radars offered a high data-gathering and handling potential and the ability to meet wide-ranging practical needs. Moreover, a novel method had been effectively tested. Specifically, the optimal ways to by-pass the heavy ice fields were found through the use of ice-free channels, polynias and fractures. Yet another specific feature is that, given on-line and regular space radar data, this technique could have a sustainable effect, because the cracks in ice and the ice-free channels (which might well be used by big-size vessels) are prone to persist just between tens of hours and several days. The striking results from development and engineering efforts undertaken by a team of researchers and practical experts living in Kharkov (Ukraine) was a tremendous success that had an effect of "cold blanket" put on those whose criticisms of the SLR performance was far from positive. To our deep regret, those "big shots" were unable to accept the actual situation and it was next to impossible for them to deny that unqualified success. These big achievements cut the ground from under their feet and they then could not help but impose the real information blockade. These developments had never been mentioned in leading papers. That dreadful campaign lasted for quite a while in spite of the fact that the SLR kept gathering and transferring the useful data to secure the safety of high-latitude navigation and to monitor hazardous atmospheric phenomena like storms, cyclones, hurricanes and typhoons over the oceanic expanses. A huge army of science- and application-oriented specialists, such as meteorologists, hydrologics, environmentalists and many others could readily avail themselves of SLR data. Later on these data proved to be highly useful. They were transmitted from the EOS "Cosmos-1500" SLR to help perform the operation for salvaging the research vessel "Mikhail Somov" jammed in the Antarctic ice. That historical event took place in 1985. The "information blockade" was eventually lifted. The results obtained by the SLR developers in Ukraine received a wide coverage in dozens of reports and special accounts of foreign and local newspapers.

269 § 4.7 On the arrangements that were made to salvage the research/expedition vessel
"Mikhail Somov" perilously jammed in the Antarctic ice A story of how the expedition vessel "Mikhail Somov" was salvaged from the
Antarctic ice 'trap' in 1985 is widely known among a number of the remote sensing experts and other radar community members. The rescue operations pertinent to "Mikhail Somov" differed essentially from those performed in the Arctic region in 1983. These eventful days of 1985 received a wide coverage both foreign and Soviet newspapers.
A relay team of polar explorers was brought over to the Antarctic shores by the above vessel also carrying essential goods like foodstuffs, fuel and construction materials. They arrived at the station "Russkaya", the final place of their destination, a bit later than planned, on March 9, 1985. The unloading of the ship took longer than expected, the reason being unfavorable weather conditions. By the 12-th of March the wind force became still stronger with occasional gusts of up to 50 m/sec. Just at that time the ice field showed the signs of shifting, and shortly after the unloading operation were over and a new-come group of explorers took its place in the station "Russkaya", the "Mikhail Somov" got stuck in the broken coast ice field in March, 26.
Now let us turn back to the reminiscences of Dr. A. Chilingarow, the leader of the rescue expedition, who was quoted as saying (see one of the "Pravda" back issues of that time):
«Any attempts to get out of the ice trap turned out to be a failure. The hydrometeorological and ice conditions close to the Antarctic shores and around the station "Russkaya", in particular, are changing rapidly. No short-term predictions can be made, for that matter.
The administration of the Goskomgidromet of the USSR gave a careful consideration to the existing situation and made a decision to let the vessel drift away southward and immediately proceed with scientific observations under the severe conditions of the Antarctic region. However, one had to fall back upon some emergency measures: of 130 vessel crew and expedition members 77 persons were evacuated. The ship entrapped by the Pacific Ocean sheet ice started heaving to south-westwards every now and then. The hummocked ice pack was undergoing some compression. However, there was still a ray of hope: everybody looked forward to the wind blowing across the ice field, which was sure to cause just a few ice-free channels to emerge and then the "Mikhail Somov" would sail out to a clear waterway. But, as ill luck would have it, the fast ice was holding the vessel tight in its grip. In the May 25-26 the Antarctic started squeezing so hard that a rudder and a screw propeller got jammed. In addition, the hull sprang a leak
The conclusion made by the specialists who had closely examined the existing state of affairs was unanimous: there was no guarantee whatsoever that the ship's heaving in the ice field would end safely and she would never sink. Clearly the major concern was the destiny of 53 people who had to stay aboard the ship».
Another thing that may be thought of as astonishing was that, although the "ice-bound "Mikhail Somov" was unable to get out of that merciless trap in the Antarctic frozen expanses, the rescue came from the Ministry of Marine Fleet of the USSR. A decision was made to mount the salvage operations and for this purpose to send a low-powered diesel ice-breaker "Vladivostok" to "Mikhail Somov" that hove in distress. The reason why this ice-breaker was dispatched to the Antarctic region was that Australia and New Zealand which were located near to the Antarctica continent had already associated themselves with the nuclear-free zone and prohibited nuclear-powered ships including atomic ice-breakers from calling at their ports. A plan was conceived by the top management executives to bring "Vladivostok" as closer to "Mikhail Somov" as possible and then to use a helicopter

270 to get the remaining expedition members and the crew airlifted across the heavy ice zone ("Mikhail Somov" could hardly "nip" through it).
To keep the rescue operation going in a big way, dozens of barrels filled with aviation kerosene along with a MI-8 helicopter were loaded aboard the ice-breaker "Vladivostok". The expedition team consisted of several highly qualified experts of the Arctic/Antarctic Research Institute. The ice-breaker was expressly fitted both with a special-purpose station for receiving the space data from the EOS "Cosmos-1500" SLR and with "INMARSAT" satellite-based communication system. The routine operations involving the "Cosmos-1500" for remote sensing of the area where "Mikhail Somov" was on the drift commenced in mid-March. What really amazes everyone is that the "Vladivostok" had succeeded in traversing the oceanic expanses in sultry, tropical latitudes and getting through the "roaring forties", and although she was not tailored for so rough crossings she drew near the edge of the Antarctic ice by July 15. Unfortunately more than 180 kerosene-filled barrels had been washed overboard during the terrible storms that were raging in the ocean.
The satellite-based SLR was brought into the turn-on modes from 4 to 6 times a day. The images it produced were immediately picked up by the operators aboard the ice-breaker "Vladivostok" and simultaneously in Moscow, Kharkov, Novosibirsk and other cities. The data coming in from the SLR were being sifted by hydrologists located in the Antarctic and the Goskomgidromet headquarters where the all-inclusive maps were laid out to indicate the ice conditions in the eastern area of the Ross Sea into which the ice masses were slowly carried out along with research vessel. The important navigational characteristics of the ice conditions (i.e. the boundaries of a massed ice, icebergs positions, fissures and fractures in the ice cover) were transmitted to "Mikhail Somov" and "Vladivostok". In the course of rescue operations a total of 84 ice-condition maps were compiled and 18 ice monitoring reports were transmitted. To this end 305 pictures acquired by the EOS SLR were processed.
In approaching the edge of the sheet ice the "Vladivostok" took a week to cover a distance of 600 miles, as it was laboring through a one-year ice zone. But within 90 miles of the area where the "Mikhail Somov" hove, the ice field showed up like a gigantic hummocked field that could hardly be broken through. There was nothing for it but to wait for the ice to start shifting and the fractures to emerge, which might point to the strongly desired direction.
And, indeed, an image the EOS "Cosmos-1500" yielded July 24 (see Fig. 4.27a) highlighted the developing fissures that made it easy to get to the drifting "Mikhail Somov". Just at that time the "Vladivostok", in her turn, seized a golden chance. It stubbornly kept on pushing her way through the ice-free channels and was simultaneously "attacking" the freshly frozen ice that stopped her from moving on. In July 26 the ice-breaker got closer to "Mikhail Somov" and then started cutting the ice around her and following a short delay caused by the diving inspection of the underwater part of the vessel hull, fuel pumping and the cheerful greetings of the jubilant people the "Vladivostok" led her towards a clear water area.
Going back home was also quite a trial. Yet the experience that had already been gained and the faithful data from the spaceborne SLR offered an invaluable assistance with a vengeance. Three days later the ships were sailing in the one-year ice zone and by August, 11 they were already enjoying the freedom of being in the clear water area.
When Dr. Chilingarov, the leader of the rescue expedition, returned to his homeland the "information blockade" around the EOS "Cosmos-1500" SLR was eventually lifted. One of the major media channels that was the first-ever to telecast the achievements and engineering potential of that radar facility was the Central Television station of the USSR. All the advances made by remote sensing scientists and application experts in terms

271 of using the SLR in that particular purpose were much spoken of in world-wide research communities, because they became known to the public at large both at home and abroad.
а
b
Fig.4.27. а – radar image of the Ross Sea area, acquired by the EOS "Cosmos-1500" 24.07.85; it shows that the ice field has developed several fissures (ice-free channels, thereby making it easy for the "Vladivostok" to get closer to the "Mikhail Somov". b - interpretation map of the same area; it was constructed from the SLR data

272 CHAPTER 5. ON-LINE DETECTION OF MANIFEST SIGNATURES OF
SURFACE AND INTERNAL SEA PROCESSES USING RADAR TECHNIQUES
The radar-imaged sea surface is frequently noted to exhibit some kind of
inhomogeneities that reveal themselves due to the spatial variations in the spectrum of surface waves acting as radio wave scatterers [209]. Apart from the inhomogeneities discussed above, which are caused by the changes in the space of the direction of wind and the module of its near-sea surface speed, the inhomogeneities are also shown to result from the most diverse surface and internal sea processes. Specifically, the suppression of HF spectrum components of the wind-generated sea roughness occurs under the effect of, say, spreading of surface active substances (SAS) over the sea surface. The internal oceanic waves, powerful sea currents, internal eddy zones and upwelling processes resulting from these factors and the underwater volcanic activity areas may well serve as generators of a wide sea surface fluctuation spectrum (from capillary to gravitational) [171,209,230;231] and even make a certain impact upon the spatial wind-generated wave spectrum.
The spatial radar signal variations in the inhomogeneities are frequently characterized by sharp boundaries. In general, the boundary extent is shorter than the radar’s space resolution element. This allows one to represent the field scattered by the sea surface inhomogeneity-containing areas in the following form [171]:
( ) ( )( ) ( )⎪⎩
⎪⎨⎧
∈=
∉=
S
S
RRat D/t,REt,RP
RRat t,RPt,RP
0S
0rr
rr
(5.1)
where ( )t,RP0 is the field scattered by a homogeneous sea surface; ( )t,RPS is the field
scattered by a surface inhomogeneity-containing area in the space region SR ; o, s are the indexes of homogeneous areas and the inhomogeneity- containing area respectively. D is the radar contrast being defined as:
σ/σ /PP D 0S0S == (5.2)
where are the power of the signal received from an inhomogeneity-containing area and homogeneous sea surface area, and the corresponding absolute cross-sections. This model representation of inhomogeneity-scattered signal in terms of the
scattering by sea surface including the inhomogeneity parameters (size and contrast) takes account of the common features of the scattering mechanism with no careful examination of the nature of these formations. Even so, this type of a model may be thought of as helpful in finding the solution to the problem of inhomogeneity detection. Moreover, if these formations are analyzed and taken into account, their parameters can be adequately evaluated.
σ and σ ,P ,P 0S0S
SP
0P
Below are discussed the features of on-line radar monitoring of the major types of inhomogeneities arising on a wind- aroused sea surface.

273 § 5.1 Investigations into the inhomogeneities caused by oil product spills
It is well known that with a certain amount of oil being spilled over the water surface is irretrievably damaging both to the sea ecosystem and any coastal zone. To be more precise, an oil film does not dissipate, and within a short span of time it turns (coagulates) into a new phase state, thereby transforming into black blobs 2 to 4mm in diameter [21], which settle to the sea floor. According to the evidence provided by the international environmental departments, more than 17% of the World Ocean floor is nowadays covered with such oil blobs that inevitably emerge in the process of producing oil, its transportation, during the storage and in tanker accidents. As a result, the area of oil-covered sea floors is estimated to be equal to that of the African continent. Because of this disastrous situation that is currently prevalent worldwide a special emphasis is placed upon developing the techniques for on-line detection of oil spills. The most efficient results can be achieved through the use of radar remote sensing technologies irrespective of all-weather and lighting conditions of the sea surface. These technologies are found to be most promising [171, 232, 233].
The experimental studies on the radar sensing of SAS-contaminated sea surfaces (including different oil products) have been carried out for quite a long period (see, for instance [23,35,232, 233-239]). The basic result from these studies is that the effect produced by the reliable detection of the SAS on the sea surface was effectively confirmed by having the sea surface sensed at X- and L-bands. This can be clearly shown in the radar imagery (Fig.5.1) acquired by the airborne complex “Analog” during the monitoring of the Odessa-Ilyichevsk littoral region. The radar image shows a clear picture of slicks caused by an illegal discharge of the SAS-contaminated waters by a number of vessels at night-time.
Fig.5.1. Radar image acquired by the airborne complex “Analog” during the monitoring of the monitoring of the Odessa-Ilyichevsk littoral region. The image shows the slicks (marked off by the arrows) caused by the SAS–contaminated waters illegally discharged by some vessels at night-time

274 Under these circumstances the data extracted from a series of radio sensing
experiments conducted even at one and the same wavelength is observed to show no correlation [23,239]. Clearly, this state of the art of experimental studies in this particular field can be explained as follows. So far it has been impossible to gain a more penetrating insight into the mechanism of the SAS impact upon the sea roughness as well as into the theory behind this phenomenon.
Therefore over the period of 1975 through 1977 a team of radar researchers of the Institute for Radiophysics and Electronics (IRE) of the Academy of Sciences of the former Ukrainian SSR did the pioneering work on exploring sea surface inhomogeneities caused by the SAS films. These studies were made using a four-frequency radar facility installed in the Black Sea coastal area (the operating 8mm, 3cm, 10cm, 50cm- wavelengths were involved in these radar applications). The initial data were obtained, as the wind-generated sea surface roughness was being damped by different kinds of oil and their mixtures [23]. Fig. 5.2 displays the examples of the recorded intensity of radar signals scattered by the slick film-covered sea surface. The measurements were made with the radars operating at 3.2cm and 10cm wavelengths when vertically polarized signals were radiated and both vertically and horizontally polarized (VV, VH) signals were received at different oil slick spreading stages. As this process occurred, the near–sea surface wind speed was no less than 3m/s. The findings of these studies gave a clear indication that using the radar-based technique made it possible to detect the contrast range of the slicks, i. e. the surface sea roughness damping zones resulting from the oil product spills, over the entire range of sensing angles including those close to vertical ones at different wind speeds (even if the stormy wind is prevalent). Besides, the magnitude of contrast to be measured (the extent to which the scattered radar signal intensity in the slick – k is reduced) was turned out to be relatively great. For instance, as the measurements were performed at λ≈3cm it was equal to k > 10 dB, which is indicative of the radar method being highly sensitive. However, as evident from the observation of the oil film spreading at the initial stage over different wavelength ranges, the dramatic variations (1:10) in the contrasts being measured were exhibited. This effect gave an impetus to further analysis.
The afore-mentioned research work was pursued involving the use of the airborne complex “Analog” [137] comprising a side-looking radar (SLR) (λ≈3mm) and a scanning mw–radiometer (λ≈8mm). This complex served as a tool for optimizing the SAS slick detection techniques, which were subsequently utilized to keep the similar-in-design spaceborne radiophysical equipment (SRE) running onboard the EOS “Cosmos-1500” [135, 171]. The spaceborne SLR had demonstrated its excellent performance in detecting the large-scale SAS slicks on the sea surface. For instance, this type of radar detected an emergency oil tanker discharge (see Fig. 5.3) in the Red Sea basin. The SAS slicks were also spotted by the same radar in the vicinity of the Kiyshu Island (Japan) (see Fig. 5.4).
As indicated in Chapter 1, it was stated that the oil product spreading over the sea surface is inherently multiparametrical. Therefore, to ensure that reliable quantitative estimates of the spilled–SAS parameters are given it is necessary to make use of a greater amount of data, in particular those from a contaminated area surveyed at different angles, or the data obtained from synchronously performed multifrequency surveying.

275
Fig.5.2. Records of 3.2cm and 10cm-wavelength VV and VH polarization signals scattered by the oil-contaminated sea surface for different oil slick development phases (a-d) [24]
Fig. 5.3 Synchronous radar (a) and optical (b) images of the Red Sea area acquired from remote sensing EOS “Cosmos -1500”. The arrows indicate the oil slicks

276 Fig 5.4 The radar image of the Pacific area near the Kiyshu island (Japan), acquired
by the SLR EOS “Cosmos-1500”. The arrow points to the carried-away SAS plume The significant estimates of oil slick thicknesses were originally made in terms of
remotely sensed data obtained at X- and L-bands from the airborne multifrequency complex “MARS” [141,240-242], which incorporated two SLR's ( cmmm 3,8 21 ≈≈ λλ )
and two SAR's ( cmcm 180,23 43 ≈≈ λλ ). The measurements were performed in accordance with already established concepts using the wave height damping decrement Q:
Λ⋅⋅= FνπQ (5.3)
where ν is the kinematic viscosity, F and Λ are the frequency and surface wave length respectively. It is seen that with certain viscosity ν , the shorter-wave attenuation is more intense than that of longer ones. Fig 5.5 shows the synchronous radar images of an oil-producing area referred to as “ Neftyanie Kamni” (“Oil Stones”) in the Caspian Sea basin. They were acquired with the use of the “MARS” complex. In the X-band image shows that (see Fig.5.5a), the patch of oil spilled because of the serious accident on the oil producing off-shore platforms is clearly discernible on the sea surface. The spilled oil that had spread over a sea surface area of tens of square kilometers looks darkish, because it “suppresses” the sea roughness effects. At the same time one can observe parts of some areas covered with both thin and thick oil films of the same dark shading. In contrast to the X-band

277 image, the L-band image (Fig. 5.5b) shows clearly observable shaded portions of the sea surface covered with a thicker oil film. Fig. 5.5c presents an interpretation map of the water area affected by the emergency oil spill. The map was constructed using the remotely sensed X- and L-data. The simultaneous application of the data provided by the different–in-wavelength radars are found to be useful in promptly detecting and mapping oil slicks, identifying the portions of the thicker oil films (which are environmentally unfriendly) irrespective of light conditions, time of the day and other factors. The scientific and practical experience that had been gained over the years revealed that this type of information might well be used to work out on optimal strategy for eliminating the perilous aftereffects of oil pollutions. This strategy allows the maximum amount of spilled oil products to be collected over the shortest possible span of time while keeping the incurred expenses to a minimum.
а)
б)
в)
c)
Fig.5.5 Synchronous radar images of the sea surface in the off-shore oil field “Neftyanie Kamni”, acquired by the “MARS” complex at X-band (a) and L- band (b); c – interpretation map of the water area; the map is laid out from remotely sensed data

278 The next step in developing an improved understanding of the physical insights
into the processes in which the wind-generated sea surface roughness is damped by the SAS films was to develop a theory of radar sea state contrast in the presence of a SAS film [25]. This theory was to supply a key clue to proposing and evaluating the techniques to determine the oil film parameter from the simultaneously collected remote sensing data at 3 wavelengths ( cmcmmm 23,3,8 321 ≈≈≈ λλλ ). To this end, i.e. to put the above technique to evaluation test, the data from multifrequency monitoring of the afore-mentioned off-shore oil field in the Caspian Sea, which were obtained by the “MARS” complex, were utilized on July 19, 1990 [26].
The exploration of this region was performed in two stages. Initially, the sea basin was synchronously sensed from an altitude H=7000m at different frequency bands (with vertical polarization only) and the data coming in from the radars were preprocessed on a real-time basis.
The first-stage operations were carried out in the following step-by-step fashion. The initial phase was to search and detect the oil–polluted areas, to determine their size, to accomplish the radar system calibration and to refine an optimal surveying regimen. Thereupon a reference surveying was made within an optimal regimen. As a result of these operations performed at the initial stage, it was convincingly demonstrated that the Ka-, X- and L-band data gave a clear indication of oil pollutions. As the sea was not observed to be too heavy during the surveying period, the VHF-band image of oil pollutions did not provide any noteworthy information. The data thus retrieved were ultimately onground processed and might as well be regarded as the substantial part of the second exploration stage.
The initial goal of the second stage was to select the specific experiments depending upon the surveying conditions, the most important of which were the sea surface state and weather-related factors. The sea surface state was monitored in terms of the values of the near–sea surface wind speed, which was determined by comparing the SLR-3-measured normal radar cross-section (NRCS) of the clean sea surface to the known wind speed–dependent values of 50 (see§3.2). In the experiments discussed below, the wind speed was 3 to 5 m/s. The selection of weather conditions indicated that the accuracy of the Ka-band radar is strongly dependent upon the particular weather conditions [243], and the Ka-band radar-derived information may, in most cases, be employed as an additional one. Therefore in order to obtain quantitative estimates the X- and L-band data were overwhelmingly utilized.
Once the selection procedures had been completed, the radar images produced at different frequencies through the use of computer programs as standard graphics editors were superimposed. The next step was to digitize the amplitudes of signals received from polluted and clean areas of the sea surface. The data on the level of receiver inherent noise, the curve of the time–varied automatic gain control (TVAGC) and the receiver’s amplification coefficients were derived from the radar internals calibration results. The receiver’s noise level was checked following each measurement runs.
Fig.5.6 illustrates the synchronous three-frequency image of the region under study. It is seen that the Neftyanie Kamni water area exhibits a strong pollution inhomogeneity (dark and light features), which is dependent upon a difference in thickness of an oil film and its activity. The middle (center–line) and upper parts of the images that show a series of oil–producing derricks constituting a continuous platform enabled using the reference points and superimpose different images to a high accuracy. In the above images the horizontal arrows “a-g” indicate the image lines to be used as the data for further discussion.

279
Fig.5.6 Synchronous three–frequency ( cmcmmm 23,3,8 321 ≈≈≈ λλλ ) radar image of the oil–producing area “Neftyanie Kamni” in the Caspian Sea, which was acquired by the “MARS” radar complex on July 19.1990. The arrows a-g marks off the image lines picked out to be analyzed
The sea surface pollution level was determined from the magnitude of logarithmic
radar contrast (in what follows, it will be referred to as “contrast” ), which was determined by the formula:
ED
],[lg10 22
22
dBVVVVD
NS
NE
r
⎭⎬⎫
⎩⎨⎧
−−
= (5.4)
where 22nr UUVr += is the mean square value of the amplitude of a signal received
from a polluted sea surface area; 22nS UUVS += is the mean square value of the
amplitude of the signal received from the clean sea surface; 2
nUVN = is the mean
square value of receiver noise amplitude. Fig. 5.7 presents examples of variations in the amplitude of sea surface–scattered
X-band SLR-3 signal along the corresponding image lines indicated by arrows a, b in Fig. 5.6 (a - signals scattered from the clean sea surface; b - signals scattered form a polluted sea surface and c - the SLR-3 receiver noise in the absence of a return signal. In terms of statistics the signal, which is homogeneous over the entire range and echoed from the clean sea surface areas (see Fig. 5.7a), shows that the weather conditions within the SLR swath are identical. The differences in the incidence angle θ-dependent attenuation of a signal returned from a polluted area surface suggest that an oil film in the region to be explored is inhomogeneous. The range-variable receiver noise level (see Fig. 5.7c) was allowed for during computerized signal processing.

280
Fig.5.7. The variation in the radio signal amplitude at cm2.3=λ with an incidence angle of θ (see Fig.5.6). a - signals scattered from the clean sea surface areas; b - signals scattered by a polluted surface area; c - changes in SLR-3 noise level along the image line
The analysis of radar contrast values was carried out for all the images of the
sea surface in the region under study at different frequencies. It was found that some areas in the X- and L- band images where an oil film is observable could be split into groups according to the obtained values of radar contrasts . The first group comprises the image areas lying far away from the platforms and the derricks at a distance of 10 to 20 km, the contrast value being equal to
ED
ED
dBDE 7< . The second group includes the areas located
quite near the above oil facilities, the contrast values being on the order of dBDE 7> .
The maximum value of ED in group is dB14≈ . In the case of Ka-band the radar contrast in the areas of the first and second group is approximately identical and equals dBDE 5.15.2 ±≈ . The visual examination of images indicates that the areas of the second group are, in most cases, located in close vicinity of oil supply sites, i.e. oil-producing derricks. This leads one to assume these areas to be covered with a fresh oil film that shows a more intense activity as compared to the first group areas. Since the measurements were conducted simultaneously, as the radar contrast was being estimated, the possibility of hardware weather-dependent error influence was ruled out. Moreover, as is seen from Table 2.6, all the MARS radars had much the same resolution (the space resolution cell dimension was within ) and, consequently, the error in determining the contrast value was not frequency-dependent as well. The mean square value error in calculating the radar contrast was less than 1dB.
25050 m×
The explanation for the frequency- and incidence angle-dependent radar contrasts , their relation to the sea slate and oil film parameters was given as follows. In ED

281 scrutinizing the above issues the experimental data derived from the basin areas of the 1-st and 2-nd groups were utilized. Theoretical analysis of these data was performed by using two models of an oil film. Initially, they were treated within the scope of theory of resonance radio wave scattering by the sea roughness under an indissoluble SAS film of zero thickness (in hydrodynamic and electrodynamic senses), which resulted in the following expression for radar contrast [25,26]:
22
20
20
0 lg10)(L
kDγωγω
+
−= , θSink2k E= (5.5)
Here ραωραω /,/ 31
30 kgkkgk +=+= + are the frequencies of the surface
waves on a clean and film–covered sea surface, respectively; k and are the wave
numbers of sea and radio waves; , Ek
2sec/981 cmg = α and 1α are the surface tension coefficients at the water–film and film–air interface; p - is the water density; θ is the angle of radio wave incidence upon the sea surface. The surface waves beneath the oil film in formula (5.5) are featured by the Levitch damping factor [24] (see § 1.2):
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛+−
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+−
=+
+
+
+
+
+
+
+
+
+
02
2
0
2/3
02
2
02
2
00
21
211
γω
ωγ
γω
ωγ
γω
ωγ
γω
ωγ
γω
ωγ
γγSS
SSg
L , (5.6)
where is the factor of surface wave viscous damping; v- is the coefficient of
kinematic viscosity of water;
20 2 kνγ =
ραω /311 kC = is the frequency of capillary surface
waves; is the power parameter that specifies the film tension effect upon
a wave; 0
21 /p ωωγ CS =
c)d/)(dc( 110 αα=p is the dimensionless surface activity of a film (in what follows it is referred to as “activity”), C0 is the undisturbed SAS film concentration. Basically, formula (5.5) defines the relation of space spectral densities of sea roughness in polluted and clean sea areas under the same weather conditions. With the experimental value of contrast being assigned in the left-hand side of the equation, the above formula (5.5) (with known values k,,να and p) is transformed into an equation for determining the film activity “p”.
The particular calculations of theoretical radar contrast using (5.5) were subsequently extended to the case of the oil film whose parameters are close to that of the off-shore oil fields “Neftyanie Kamni” [27]. The following values were chosen for the surface tension coefficient: at the water-oil interface α =13din/cm; at the air–oil interface
1α = 60din/cm. For the kinematic viscosity coefficients of water sec/10 22 cm−=ν , oil -
sec/3.0 21 cm=ν . The density of water and oil was taken to equal and
respectively.
3/1 cmg=ρ3
1 /8.0 cmg=ρ

282
Fig. 5.8 presents the values of contrast as a function of the length of a surface wave for different values of surface activity p. Therein the crosses indicate the experimental values of contrasts obtained at different frequencies. It is seen that the contrast values
for radio wavelength
0D
ED
ED cm23=λ (see the areas of group 1 and 2) are in fairly good agreement with the theoretical dependence that correspond to surface activity p=0.3. According to [244], this activity is consistent with the oil surface concentration
. The typical experimental values of radar contrasts for radio wavelength λ=3.2cm for the areas of groups 1and 2 lie between the theoretical curves with parameters p=0.3 and p=0.02. As the analysis suggests, these curves cannot be matched to some theoretical curve which corresponds to one and the same value p. The radar contrast values for the areas of group 1 correlates with parameter p=0.05 whereas for the areas of group2 p=0.08, which corresponds to a divergence from theory, on the average, by 8 and 3 dB respectively. The experimental values contrasts for λ=0.8cm fall upon the theoretical curve at p=0.02 and differ from the estimated curves by 9 db, on the average, and are pretty much the same on the surface of areas 1 and 2. Thus, assuming the oil concentrations on the surface of areas 1 and 2 to be slightly different (this effect is detected by radar techniques), it should be noted that the experimental values show a noticeable divergence from the theoretical ones, and this divergence increases, as the radio wavelength λ decreases.
2/9 mmgc ≅
Fig. 5.8 The calculated values of contrast of sea roughness beneath the zero–thickness oil film as a function of the length of surface wave
0D
Λ (the crosses are for the experimental values of radar contrast ): ED
- p=0.02; - p=0.1; - p=0.3; - p=0.5
The observable discrepancy with experiment is presumably due to the fact that the model of film–surface wave interaction is more sophisticated as compared to the one used in the theory under consideration. Among the effects that are not taken into account by this

283 particular theory are primarily those produced by a film thickness. The observable major impact of a hydrodynamic film thickness is being increasingly felt when the proper wave motions are made possible. The smallest scale of such motions δ is determined by viscosity 1ν and frequency of surface wave ω [25]:
ωνδ 12
≈ (5.7)
This magnitude characterizes the thickness of a viscous wave layer that is apt to be formed on the film borders. The film thickness effect h on the wave behavior will reveal itself if it is comparable to δ . The dependence of the viscous wave layer thickness upon the length of the surface wave is shown in Fig.5.9. It is seen that the impact of the film thickness should be more pronounced, as the length of the surface wave shortens. It is precisely this particular qualitative picture that could be noted in experiments (see Fig. 5.8).
Fig.5.9. The viscous wave layer thickness δ in the oil film as a function of surface wavelength Λ
As indicated above, the experimental data were subsequently processed within the
scope of the theory of surface wave-finite–thickness film interaction [31,32]. The contrast of sea roughness below the SAS film of finite thickness h is written (see см. §1.2) as: hD
.)lg10(,)2
1(lg20)(),( 000
0 KDkhRkDhkDL
h −=++=γγ
R S S S≡ + −+ωγ 0
1 2 3( ) , (5.8)
where is the sea roughness contrast below the “zero”-thickness film according to
(5.5) whereas the valves of
)(0 kD
321 ,, SSS are expressed as:

284
⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟
⎟⎠
⎞⎜⎜⎝
⎛−
⎥⎥⎦
⎤
⎢⎢⎣
⎡++−⎟
⎟⎠
⎞⎜⎜⎝
⎛−
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛+−
⎥⎥⎦
⎤
⎢⎢⎣
⎡−−+−
⎟⎟⎠
⎞⎜⎜⎝
⎛=
−
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛+−
−⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−−⎟⎟
⎠
⎞⎜⎜⎝
⎛−
⎟⎟⎠
⎞⎜⎜⎝
⎛−=
+
+
+
+
+
+
++
+
+
+
+
+
+
+
+
++
+
+++++
+
+
+
+
+
+
+++++
+
+
++
ωγ
γω
ωγ
γω
ωγ
γω
ωγ
ωγ
γω
ωγ
γω
ωγ
νν
ωγ
γω
ωγ
γω
ωγ
ωω
γω
ρρ
ωγ
ωω
ωγ
ωγ
γω
ωγ
ωγ
ρρ
ωγ
γω
ωγ
γω
ωγ
ωγ
γγ
ωω
ωγ
ωω
γω
ρρ
γω
ωγ
ωγ
ggg
gg
g
gg
g
gg
g
gg
0
2
0
2
0
0
002
2
1
2
00
2
21
0
102
210
0
2
0112
00
00
012
21
2
21
0
1
0
1421
22121
)9.5(
221
221
221
122
1
ss
s
3
2
1
S
S
S
Here Sg γρργ )( 1= , are the coefficients of surface wave viscous damping in an oil film. Formulas (5.8)-(5.9) include five oil film parameters such as activity, thickness, surface tension, viscosity and density. Basically, it is quite possible to set up five independent equations using a sufficiently large amount of experimental data and solve them for all above parameters. In our particular case the problem appears to be somewhat simplified, because viscosity, surface tension and oil film density are known. To determine two unknown parameters (activity p and thickness h) two sought equations are derived using the experimental X- and L-band data [245]:
2101 k2νγ =
)](2
1[lg20)();( 00 CC
LCCE kRhkkDrkD
γγ
++= , (5.10)
)](2
1[lg20)();( 00 d
LddE kRkhkDrkD
γγ
++= (5.11)
here and are the wave number of X- and L-band surface waves respectively. Ck dkTo carry out an adequate analysis the main polluted areas of the sea basin were
split into the mm 5050 × squares and their position in the equations was assigned by vector radius - r. The Ka-band radar data were not utilized at a later time because of considerable measurement errors.
The equations (5.10) and (5.11) were solved numerically. The right-hand sides of the equations varied through the change in activity p and thickness h until both of the equations are simultaneously satisfied at one and the some values of these parameters. The solution of the equations was unique for each pair of experimental contrast values. By way of illustration, Fig. 5.10 shows the theoretical contrasts (solid lines) as a function of film thickness h with a value of activity p=0.21 for one of the sea basin areas. The film thickness value is determined by a vertical dashed line drawn through the intersection point of theoretical and experimental contrasts (horizontal dotted lines).
hD

285
Fig.5.10. Theoretical contrasts (curves 1, 2) as a function of film thickness h. The dashed lines indicate the experimental contrast values . The solid line is for the sought oil film thickness (the film activity p=0.21)
hD
ED
Film thicknesses and activities were likewise analyzed in all the areas of the sea
basin. It was found at the afore–indicated values of the surface tension and kinematic viscosity coefficients the solution of eqs (5.10, 5.11) is existent solely for the areas of group 2 with featuring contrasts ED >7db.
It would be natural to explain the reason why there is no solution of equations for the areas of group 1 by the fact that these areas are well away from the oil-producing sources and that an oil film persists on the sea surface for a long time. Indeed, if the oil speed rate is between 3 and 6cm/s [23], the film extends for a distance of 10 to 20km within the span of 3-5 days. During this period the film is multiply acted upon by the wind force, and there is a great likelihood that it might be broken up. Under these conditions a radio signal will be echoed by the “slick”-covered sea surface whose properties are described parametrically with the values that are intermediate between film and water. Therefore, when analyzing the areas of group 1 the following values [245] were introduced into eqs (5.10) and (5.11) instead of the coefficients of surface tension 1α and kinematic
viscosity 1ν :
)t((t)
)t((t)
111
111
ν−ν+ν=ν
α+α+α=α
10 ≤≤ t , (5.12)
where α is the surface tension coefficient at the water–air interface and is the water kinematic viscosity. Parameter t specifies the water area–to-film area ratio on the radar resolution element (bin). For the continuous film t=0 and
ν
1111 , ν=να=α . Eqs. (5.10) and (5.11) were solved for different values of t beginning with zero. It was found that the solution existed for all the areas of the group under discussion at . As parameter “t” increases, the film thickness, its activity and contrast tend to decrease. The
11.004.0 ≤≤ t

286 afore-mentioned values of parameter “t” indicate that film discontinuity plays a relatively small role in producing a radio image.
Fig.5.11 (b-g) presents the histograms of film thicknesses for different sea basin areas. The vertical representation of drawings corresponds to lines (b-g) of radio images in Fig.5.6. The horizontal representation in each of the additional drawings defines the dependence of film thickness upon a distance, which is counted off from the left edge of the corresponding radio image. The film activity is indicated by cross–hatching that fit the gradations on the right-hand diagram. As the examination of Fig.5.11 suggests, the oil film surface activity tends to vary across water area over a wide range from 0 to unity. Referring to the film compression curve, this activity variation range is practically consistent with the entire spectrum of film states, as this film experiences the bulk-to-gaseous state transition [21]. Clearly discernible in Fig.5.11d ÷ 5.11g (10km <L< 20km) are the histograms of the thicknesses of the film-covered areas in the immediate vicinity of the platforms and derricks. The film in the areas exhibits a high activity (0.6<p<0.7) and has a great, much the same thickness ( ). This effect appears to be quite natural. The freshly spilled oil undergoes a phase transition from the bulk-to-surface state. In the film compression curve the “liquid film” section that possesses a high activity is quite appropriate to this particular state. The film that is kept in this state is still sufficiently condensed, has a high surface concentration and is slightly subjected to compression when acted upon by external forces. In the subsequent evolutionary process the liquid film turns into a “gaseous” one whose activity and concentration get diminished. In this particular phase the film is, to a greater extent, susceptible to wind sea roughness. This factor accounts for the fact that its thickness is inhomogeneous within the limits of sea basin area under study. As seen in Fig.5.11 this qualitative picture is likewise traced by the histograms of the oil film thickness, as it moves away from the derricks and platforms.
cmh 1103.1 −⋅=
Fig.5.11. Histograms of thicknesses h and activities p of the oil film in the off-shore oil field area “Neftyanie Kamni” in lines d, c, d, e, f, g of the radar image (Fig.5.6)

287
To make a summary of the above considerations, it should be noted that the scrutiny of both the radio images and the data as shown in Fig.5.11 makes it easy to get the following clear qualitative picture of oil–polluted areas within the off-shore oil field. This process is largely dependent upon the oil–producing sources, the dynamics of oil spread across the water surface, the impact of wind, sea roughness and current. As will be apparent in Fig.5.6, the operations in the top section of the platform seem to have been discontinued. The major oil slick has drifted away from the platform and is pushed along by the wind and the current, thereby taking the shape of an elongated plume. The maximum oil thickness of this slick is cmh 02.0≤ , the total weight of the oil film is around 4350 t. In the lower section of the platform oil-pumping operations have just commenced, and the oil mass is staying close to the derricks because it had no time to spread over the larger part of the water area. The oil film herein is by an order of magnitude thicker , the weight of the spilled oil is around 11600 t. As evident from the bottom part of the radio images, a serious hazard also comes from a huge slick, particularly near the stand-alone derricks. The film thickness of this slick is
cmh 15.0≈
cmh 173.0≈ , its weight is nearly 16200 t. In terms of the data obtained from radar-based surveying, the total weight of the oil spilled in the sea basin area under study ran up to about 32000 t. The contamination level of the above area is evaluated by the surface oil film concentration, which, on average, is
. 2/62 kmtThe data on the contaminated off–shore oil field in the Caspian Sea basin
suggested that at the time of surveying operation an emergency situation that was severely damaging to the Caspian Sea environment had been presumably put on record.
Moreover, the qualitative and quantitative analysis of oil-polluted off-shore zones, which was performed using the data from the synchronous multifrequency radar monitoring, indicated that X-and L- bands were the best suited to measuring oil film thickness. The Ka-band radio waves are more sensitive to the motions in a film and its thickness, but they are characterized by more complicated scattering conditions. The impact of oil films with really observable thicknesses upon the scattering of VHF-band radio waves is not sufficient for quantitative estimation.
The work on the study of the oil-polluted sea surface was pursued using the first–ever Ukrainian-made complex for remote sensing of the Earth "CRSE-30" [148].

288 §5.2 Studies of inhomogeneities arising in sea currents
By now there has been a general and clear-cut awareness that the state of seas and
oceans, the commercial yield of their individual areas, the climate of many countries and the whole of the Earth are strongly dependent upon the pattern of powerful oceanic currents. In the current zones like, say, the Gulf Stream, the “ocean-air” interaction processes manifest themselves in the most intensive way, and it is exactly for this reason that the hazardous atmospheric events (such as cyclones, hurricanes, etс.) tend to arise. As a consequence, they are certain to produce a strong impact upon the human activity and the climatic conditions of vast open-water zones and coastal regions [171,246]. Besides, the variations in the spatial position of currents, their intensities and the interaction between the internal and wind-generated waves can bring about the processes in the near-boundary regions of the currents, which are fraught with navigational risks [247]. Although the currents that spread widely underneath the vast expanses of the sea or ocean basins are studied with conventional in-situ methods (specifically, using the buoy-based stations [248]), it is quite a challenge to get a complete and operational picture of the phenomena occurring across the entire open water areas where the currents are prevalent. In some cases the single-frequency radar sensing is found to provide insufficient information even if this technique is promising in terms of aerospace monitoring of the sea surface regardless of weather and light conditions during the surveying operations. Consider the following example. The synthetic aperture radar (SAR) data (at an operating wavelength cm9≈λ ) collected from the “Almaz -1” satellite suggest that the processes that occur in the near boundary zones of the Gulf Stream current do not always reveal the typical features allowing the current boundary to be reliably detected on a radar image (RI) [247-249]. The “Seasat” SAR data ( cm23≈λ ) differ essentially (by 10 to 30 km) from the in-situ measurements [250].
One of the efficient techniques for rendering the radar–based studies more informative is to make use of multifrequency radar sensing. The convincing reason why this radar technique was chosen is that sea surface roughness accounts for the multiscale process that is spread over the spatial spectrum ranging from the capillary waves to those with a period of tens or hundred of meters. Since the atmospheric and marine factors (like wind, the events resulting from currents, internal waves, etc.) make different impacts upon different portions of the sea roughness spatial spectrum, each of them being responsible for radio wave scattering at corresponding wavelength bands. Therefore there is good reason to expect that in simultaneous sensing at frequencies dramatically different even on the order of a magnitude greater it will be possible to single out the specific role of the above factors following the observation procedures.
Fig. 5.12 presents the normalized radar cross-section (NRCS) of the sea surface at Ka-, X-, L- and VHF-bands and VV-polarization as a function of the wind acceleration length "x" for the case where the sea surface gets aroused. The calculations are aimed at measuring the wind speed
0σ
smV /3= and smV /10= , an incidence angle of °= 30θ and an azimuthal angle of °= 0ϕ . To assess the sea surface features, use was
made of a sea roughness spectrum model that was proposed in [253]. As will be apparent from Fig.5.12, the magnitude of for capillary and gravitational-capillary waves acting as the main scatterers in the process of measurements at Ka- and X-bands are largely dependent upon the near-sea surface wind speed. Under these circumstances the maximum rates of growth in are observable at the acceleration lengths from tens to hundreds of meters. Later on the magnitude of is seen to rise slowly over all radio wave bands. This
0σ
0σ0σ

289 is due to the fact that the main sea surface scatterers of long radio waves from the sea surface are the gravity waves. In order to get them aroused the wind acceleration speed-up lengths should be equal to x>1000m. Hence, it follows that, if at the sea surface wind speed
and when the L- and VHF- band images of sea surface show a substantial
variation in in the areas of less than 1000 m in extent, then this effect can be put down to the processes of no-wind origin. Thus, as the sea surface is being synchronously surveyed at short waves ( Ka-, X-) and long waves (L-, VHF-) radio frequency bands lower, it is quite feasible to separately examine both the wind and no-wind sea roughness components at low wind speeds.
smV /10≤0σ
Fig.5.12. The normalized radar cross-section of the sea surface at Ka-band ( cm8.0=λ cm3=λ cm23=λ cm180=λ), X- ( ), L- ( ) and VHF-bands ( ) as a function of the wind acceleration length x at wind speed V=3m/s (a) and V=10m/s (b) for an incidence angle of °= 30θ
Clearly, the surface areas of such a powerful current like the Gulf Stream may
exhibit some disturbances (or inhomogeneities) caused by wind-generated and no-wind processes associated with the turbulence of the running flow. The no-wind inhomogeneity extent that was evaluated from the data cited in [254,255] indicates that large-scale sea surface inhomogeneities (extending from ∼ 0.5 m to 150 m) are likely to appear on the sea surface and, as a consequence, it may lead to radio wave scattering at VHF- and HF-bands. The appearance of wind inhomogeneities may be due to the impact of turbulent viscosity that tends to change the coefficient of air flow friction against the surface of the current. The inhomogeneities can also be generated by the local wind due to the temperature gradient on either sides of the current's boundary. These variations in the characteristics of HF wind-generated surface roughness component may be an indirect signature of the current boundary. The observation of the near-boundary zones of the current can be effective when utilizing those bands of radio waves whose scattering by wind waves is the most intensive. As indicated earlier, it is exactly the Ka- and X-band radio waves that are regarded as the most productive. In this context note that an open water area of any current

290 (particularly that of the Gulf Stream) is just the region where a huge amount of moisture is produced in the transfer of sea current heat to the ambient atmosphere [246]. The evidence cited in [94,133] indicates that, as the radio waves are vigorously absorbed by water vapors and hydrometeors (say, fog or rain) at cm1<λ , the remotely sensed sea surface data may be distorted. Therefore, the simultaneous sensing at X-, L- and VHF-bands may prove to be the candidate for the study of sea currents (excluding the hydrometeor effects).
The afore-mentioned radio frequency bands were implemented in developing the airborne multipurpose, multifrequency radar complex referred to as "MARS", which was involved in the experiments with the Gulf Stream current meandering into the Barents Sea over the period of 1992 through 1994 [251, 252]. The synchronous surveys were made at X- , L- and VHF-band waves at an altitude of 7000 m (with vertical transmission and reception polarization). The level of the background sea surface roughness close to the boundaries of the current was estimated in terms of the near-sea surface wind speed
The value of was calculated using the procedure described in [196] where of the sea surface (which was measured at X-band as a function of the sea surface wind speed) was used for calculation purposes.
NSWV
NSWV 0σ
As part of several experiments that were conducted with the long-wave SAR of the “MARS” complex, the inhomogeneities of the sea surface showing a higher positive radar contrast D ( ( )Sr PPD /lg10= were frequently recorded, rP , SP being the mean value of signal power received from an area of the current surface and from the sea surface beyond the current respectively. The lower scattering intensity level at X-band, which is highly sensitive to the existing sea state, indicate that the sea surface wind has a slight influence upon the surface wave generation processes within the open water area of the current. The results from one of these experiments and their analytical treatment are given below.
As the experiment was being performed, the sea surface state near the current was close to the calm one, which is clearly evidenced by the estimated values of the sea surface wind speed ( smVNSW /32 −≤ ) in terms of the remotely sensed data from X-band SLR
( at dBsea 260 −≈σ °= 65θ ). It should be noted that at this wind speed the X-band image of the Gulf Stream is shown as a homogeneous low-contrast field over the entire radar swath. The L- and VHF-band images present a totally different picture. Fig. 5.13 shows synchronous radar images of a current’s area ( ; surveying time 05.08.93) at these radio wave bands. As radio sensing is carried out using L-band waves, the received signal power is seen to be weakly dependent upon an observation angle, whereas the maximum value of the positive contrast comes up to
EN '3422,'3271 °°
dBD 9.14max ≈ . At VHF–band the angular dependence is likewise weak, but the peak radio contrast magnitude reaches dBD 4.6max ≈ . The above Fig. 5.13 show the great differences in the distribution of intensity of scattered L- and VHF-band wavelengths over the entire area of the current.
The sea surface inhomogeneities whose scales are responsible for scattering of L-band waves occur over the entire surface the current (see the zones 1÷5 in Fig. 5.13) with its boundaries being reasonably well-defined. At the same time beyond these boundaries the inhomogeneities that may possibly result from the well-developed turbulence effects (like, say, vortices, rings, etc.) are observable in the near-boundary regions. The inhomogeneities whose scales are consistent with VHF-band radio wave scattering can be typically seen along the edges of the current on the internal side (see the zones 1, 3 in Fig.

291 5.13c). Hence, it follows that with the current being sensed at L-band alone, some errors in determining the current’s course width are found to arise. However, when sensing operations are carried out by the VHF-band SAR, this particular drawback can rectified.
Fig. 5.13. Synchronous radar images of the Gulf Stream area in the Barents sea were acquired by the “MARS” complex at L- and VHF-band radio waves (a, b, accordingly). Also shown is the interpretation map (c) in which the numbers 1-1, 2-2, 3-3, 4-4, 5-5 indicate the sections of the current selected to evaluate the spectral power density and the self–correlation function of radio image realizations. The number 1, 2, 3, 4, 5 denote the current’s zones that are analyzed in the text
The evidence from comparing the actually observable values of at L- and VHF
- bands to the theoretical estimates in circumstances where the limited wind-driven wave speed-up occurs strongly suggests that the inhomogeneities on the surface of the current are generated with no-wind factor being involved. Firstly, the difference in experimental values of as shown by the L- and VHF–band images of the current in zone 2 was
and in zone 4 whereas the difference in theoretical values
0σ
0σdB140 =∆σ dB110 =∆σ

292
of does not exceed 3dB even at the wind speed-up length on the order of and
the sea surface wind speeds of
0σ m4102 ⋅smVNSW /103−≈ (see Fig. 5.12). Secondly, let us
examine, for instance, the upper portion of the VHF–band image (see Fig. 5.13b) in which one can see the intensive scattering region (zone 3), whose maximum linear extent is around 1000m. If this region is presumably caused by the inhomogeneities of wind–generated sea roughness, one has to keep in mind that the wind speed-up length on the same order (i.e. 1000 m) corresponds to that inhomogeneity. Under these conditions, when the wind speed is smV /10= and the incidence angle is °= 60θ , the estimated values
of should be on order of 41dB and 44dB at L- and VHF-bands respectively. At the same time the experimental values of are dramatically higher than the above values, i.e. at L- and VHF-bands they are equal to about 27dB and 34dB respectively. To obtain those values of at the same incidence angles the speed –up length has to be no less than 10
0σ0σ
0σ 4 m with the wind speed of more than 20m/s. The actual speed was no more than 3m/s during the surveying operations (given the estimates of for the sea surface at X-band near the boundaries of the current). Consequently, the observable differences in experimental and theoretical values of indicate that during the experiment the wind as such is not the chief cause for generating sea roughness inhomogeneity in the current’s zone. This inference is corroborated by the presence of small–size areas that occasionally arrange themselves into meandering lines. These areas appear to be totally different (by more than 7dB) from the of the sea surface surrounding them. These areas are clearly visible in the L-band radar image in the vicinity of zones 1.2,5 (see Fig 5.13a). A somewhat lower contrast in these regions can also be observed in the VHF-band image. The no–wind nature of scattering sea surface inhomogeneities is likewise evidenced by contrasting and well-defined edges of the current.
0σ
0σ
0σ
In order for the spatial inhomogeneities of radio wave backscattering intensity to be quantitatively described in the open water area of the current, a spectral and correlation analysis of radar images was made. To this end, the above image showing the area of the current was split into 5 equal zones (see zones 1÷5 in Fig. 5.13c) with a length of N=512 points (pixels) each. In every zone the analysis was carried out according to realizations of 10 adjacent radio image lines. A comparison between the mean values and variances for these realizations indicated that the random sea roughness process in the realizations being examined could be thought of as stationary. This allowed using the procedures for standard statistical processing of random processes in making quantitative estimates [256]. The power spectral density (PSD) and the auto correlation function (ACF) were estimated in cross-sections 1-1, 2-2, 3-3 (see Fig. 5.13c) and longitudinal sections (4-4, 5-5; see Fig. 5.13c) of the current’s area. The PSD was evaluated with the Fourier transform method (FTM). In calculating the PSD the procedure of frequency averaging (using the running window of 5 adjacent realization values) and ensemble averaging were performed. To keep the speckle noise to a minimum, as the ACF was being calculated, averaging over several lines (5 to 10) was done. The transition from frequency variables to spatial ones was performed via radar range
xxS )(xR
2/cPR i ⋅= ( c is the velocity of light in m/s; is the realization length or its part in s). In the course of PSD and ACF estimation the relationship between the surface wave length
iP
Λ and radio wavelength λ was also taken into account: θλ Sin×=Λ 2/ (where θ is the incidence angle of radio waveλ ) The results from calculating the PSD and ACF are presented in Fig 5.14 - 5.16.

293
Fig.5.14. Power spectral density Sxx as calculated from the remotely sensed data at the VHF–band wavelength for two cross–section of the current
а)
b)
Fig. 5.15 Power spectral density Sxx (a) and autocorrelation function R(x) (b) as calculated from the remotely sensed L- (dot line) and VHF–band (solid line) data for the cross –section (3-3) of the current (Fig. 5.13c)

294
а)
b)
Fig 5.16. Power spectral density Sxx (a) and autocorrelation function R(x) (b) calculated from the remotely sensed data (at VHF-band) for longitudinal sections 4-4 (dot line) and 5-5 (solid line) of the current (see Fig. 5.13c)
Now examine the statistically processed data. In all the VHF– and L-band PSDs
there exists a domain of monotonous (on the average) decrease spectral density (see Figs 5.14, 5.15а, 5.16а) in the interval of spatial harmonics mm 5000100 <Λ< . The
magnitude of this decrease corresponds to power dependence (β−∝kSxx Λ= /2πk is
the wave number of a surface wave at 8.07.0 ÷≈β ). Note that elimination of the domain of values m9.86<Λ (Fig. 5.14, 5.15a) from
the analysis is due to the fact that the VHF–band data processing unit is set to perform range data storage. In this case the slope of the PSD characteristic curve varies more to the

295 right of the cut-off frequency of the filter that implements this particular operation. Some of the ACF curves of radio image reveal pronounced quasiperiodic oscillations (Fig. 5.15b) and the corresponding peaks on the PSD characteristic curves. These oscillations in the longitudinal section of the Gulf Stream clear-way appear at both of the radio wave bands, the ACF at VHF-band becoming alternating in the high–level domain, whereas the spatial oscillation period was equal to around 1200m. (see Fig.5.16). It is worth noting that, in general, the oscillation periods are not coincident in one and the same sections in different bands, as well as in the some bands but at different sections of the current.
The ACF and PSD shapes suggest that surface irregularities, resonance–scattering L- and VHF–waves correspond to the perturbations surface of no-wind origin on the scales ranging from fractions of meters to between 1000 and 5000m. The large-scale inhomogeneities in the current’s open area indicate that with low sea surface wind speeds one of the most probable mechanisms behind the surface oscillation spectrum generation are the processes caused by the turbulence of a moving jet flow.
It should be emphasized that it is just the studies involving the use of VHF– band radars that allow looking into the phenomena occurring in the most dynamic boundary zone of the current. In this context the remotely sensed data that were collected simultaneously and at different frequencies are likely to provide more useful information. Specifically, when there is no wind and in the presence of high waves, the X-band radars used experimentally may produce low–contrast radar images. This gives rise to differences in the estimates of size and the location of current’s clear-way.
In summary it may be said that the experiments that had been made and their results show considerable promise for study of powerful sea currents. The spectral and correlation analysis as applied to processing experimental data allowed the large-scale inhomogeneities with an extent of 1000 m and more to be detected in the zone of the current. This analysis strongly suggests that the turbulent processes play a dominant role in generating the surface oscillation spectrum in the open area of the current.

296 § 5.3 Studies into manifestations of internal and seismic waves on the sea surface
Rising of internal and seismic waves up to the sea and their interaction with
surface waves is one of most complicated processes. Their in-depth study will make it easy to get a better understanding of volume structure of the ocean and the relief of its bottom. The above processes have to be explored in terms of the degree to which these phenomena are masked by the surface roughness depending upon weather conditions in an observed area, which, in their turn, may undergo seasonable changes. Therefore the comprehensive knowledge about the formation and propagation of the internal oceanic wave can be gained in case the experimental data on the study of the internal wave manifestations on the sea surface are continuously collected and stored.
These manifestations were time and again detected when the sea surface was being sensed using both space– and air-borne systems. These processes were detected by the radars of the complex “MARS” in the Barents Sea close to the northern part of the Novaya Zemlya island ( ) [241, 242] . The likelihood of the internal waves developing in an observation area is corroborated by the hydrological data: the depth is no more than 200 m, the speed of the Western Novozemlya current is around 25cm/s; the relief of the bottom is flat interspersed with hillocks and broken small-size boulders. Fig. 5.17a shows the synchronous images of the sea roughness inhomogeneities caused by internal waves. The images were produced as the sea surface was sensed at X-, L- and VHF-wavelength bands. As will be apparent from their analysis, the highest (in absolute value) contrast (
EN '4064,'1577 °°
dBdBD 1611 ÷= ) of internal waves is clearly observable in the L-band image. In this case the waves are of quasiperiodic structure with a spacing of about 3 km. The low contrast in the top portion of the X-band image is indicative of the slight sea roughness at the time the experiment was being conducted. It was possible to notice the manifestation of internal waves being sensed at that particular band only after the time-varied gain control (TVGC) of the receiver had been turned off (see the bottom part of the image). As a result, the radar potential increased by 12 dB in the near- zone section of the swath. In spite of low contrast of the internal waves ( dBdBD 4.55.2 ÷= ) in the VHF-band image, the remotely sensed data simultaneously obtained at L- and VHF-wavelength bands provide some information on the power-carrying part of the sea roughness spectrum. One of the possible mechanisms for the internal wave manifestation may be related to the specific features of near-surface layer dynamics in the field of breaking the wind-generated waves, which suppress the roughness in the regions of current’s divergence [257]. It is well known that with sufficient wind-generated roughness the afore-mentioned manifestation is observed using the X-band radar as well. Therefore it is convenient to employ the synchronous monitoring at X-, L- and VHF–wavelength bands.
As the above analysis of the possibilities to make a radar–oriented study of the sea surface inhomogeneities indicates, there is a compelling reason for using multifrequency systems. It is quite evident that when the radar sensing results are employed along with the radiometric and IR systems and in-situ measurements, the interpretation of the retrieved data become more reliable.
Fig 5.17b shows the SLR image of the seismic wave packet on the Black Sea surface near the Cape of Sinope. The above wave is presumably caused by the one of the earthquake aftershocks. The weather conditions in this area (the wind speed is ≈3to 5m/s) exclude the possibility of developing this particular structure due to the atmospheric processes.

297
flight direction
Radiation direction
Radiation direction
flight direction flight direction
Radiation direction
СM DМ М
Fig.5.17a. Synchronous three-frequency X-, L- and VHF-band images of the internal wave manifestations. The images are acquired using the “MARS” complex
Fig.5.17b. SLR radar image (the right picture is blown up) of the seismic wave manifestations on the sea surface, which are caused by one of the earthquake aftershocks in the vicinity of the northern coast of Turkey near to the cape of Sinope. The image was acquired by the EOS SLR “SICH-1” on February, 5, 1996

298 CHAPTER 6. ON-LINE RADAR MONITORING OF LAND §6.1 Determination of agrometeorological properties and soil moisture from space
radar images at the autumn-winter season
An extensive implementation of the state-of-the-art crop cultivation technologies hinges upon overall and differentiated utilization of agroclimatic resources and weather conditions. Of particular interest is the plants' wintering conditions, which are in fact responsible for expected harvest [258]. Therefore the indication of adverse weather events such as frost-killing, soaking-in, ice-crust and snow cover, etc. is the major factor in predicting the cultivated wintering crop yield.
A series of experiments were carried out in some farming areas of Southern Ukraine using the data gathered by the "Cosmos-1500" SLR over the period of 1983 through 1989 and by the "SICH-1" SLR in 1996-1997 in an effort to relate downlinked radar information to agrometeorological data [259].
The pattern of a terrain that had been previously surveyed showed it to be flat. The topsoil is of loamy chernozem texture and ploughed out all over vast territories. The natural steppe grassland and forest tracts are virtually non-existent. For this reason these ground surface areas can be best described by applying the complex-shaped roughness model [258]. In keeping with the scope of this particular model, the normalized radar cross section (NRCS) relative to the vertical polarization of transmitted and received signals and incidence angles of °> 20θ is written as:
20 MC≅σ , (6.1)
where the coefficient C is governed by wavelength λ , an incidence angle and surface roughness parameters whereas the complex factor M is a function of the electric properties of a medium:
( ) ( )[ ] ( )222 θsin-θcosθsin1-1-M εεεεε ++= , (6.2)
where gj λεε 600 −= is the complex permittivity; 0ε is the relative permittivity; g is the conductivity.
In the above formula (6.2) the volume scattering contribution is not taken into account, since it may be ignored because of the infinitesimal of X-band wave penetration into the soil [60, 100].
Thus, when considering the radar sensing of the same areas in some agricultural regions the NRCS variation (i.e. contrasts) at a fixed value of θ are largely dependent upon the complex permittivity of soil alone, which, in its turn, is governed by the moisture and temperature of the soil upper layer. Other physicochemical properties of some specific ground surfaces may well be thought of as unaffected over the period of time under study. The estimated contrast of radar returns from identical land areas under different agrometeorological conditions can then be given as:
PK
22
a00
aP TT M/Mσ/σK == , (6.3)
where indexes a, T correspond to anomalous and normal (test-type) conditions under which the reflecting characteristics of the territories to be explored are measured.

299As the content of the present book shows, the most interesting point is that the
afore-mentioned contrast is largely dependent upon the soil moisture. Based upon the data from measuring, the electric parameters of soil (see [131] formulas (6.2), (6.3) were used to calculate radar contrast as a function of moisture W for sandy and clayey soil at different incidence angles of
PKθ . Fig. 6.1 presents the relevant dependences.
Curves 1,2 indicate the sandy soil (they are for dry sand 2=ε ), whereas curves 5, 6 are for clayey soil (for dry clay 4=ε ). As to territory of Ukraine where the types of soil are a mixture of sand and clay particles, the most appropriate are curves 3,4 constructed for the relation of indicated components 1:1. As will be apparent from Fig. 6.1, curves 1, 3, 5 and curves 2, 4, 6 were constructed for incidence angles of °= 40θ and °= 20θ respectively.
Kp, dB
1
2
3
4
5
6
θ=400
θ=200
θ=400
θ=200
θ=400
θ=200
80 60 4020 W,%
5
10
15
Fig. 6.1. Calculated radar contrasts as a function of the soil surface layer moisture for sand (1, 2), loamy soil (3, 4) and clay (5, 6)
PK
In addition, we think it important to estimate an impact of the soil surface temperature upon the NRCS value. To this end, radar contrasts were calculated in terms of temperature dependencies of relative permittivity ε and conductivity of different types of soil (see [260]). The variations in the calculated values with the temperature between 0 and
, and all other factors being equal, does not exceed 0.1 dB. C°+ 20 Thus, the anomalous contrasts that are clearly observable on the radio images of
Fig.6.2 (they are acquired from the EOS "SICH-1" SLR, 24.04.1996) are shown to be primarily caused by an increased amount of soil surface layer moisture following the precipitation or snow cover melting. A positive contrast feature in the region south of the Dnieper (see Fig.6.2b) arose in the wake of frontal passage accompanied by precipitation.

300 Fig. 6.3 shows a line sectional view along the EOS flight course. This view can be used to make quantitative estimates of a received signal.
Fig. 6.2. Anomalous zones on the images acquired by "Cosmos-1500" EOS. The zones are observed because of the manifest soil surface moisture. a – radar image produced in dry weather on April 4, 1996; b – the radar image following the passage of the atmospheric front attended with the precipitation on June24, 1996
Fig.6.3. Line recording made along the "SICH-1" EOS flight. The dotted line is for an orbit made on April 21, 1996. The solid line is for an orbit made on April 24, 1996

301
To perform the quantitative analysis of reflecting properties of the territories under study the radar images were contoured over those similar-in-brightness areas in an interactive mode as well as through the use of dedicated software. Calculations were then made of radar contrasts on anomalous portions of images through comparison to the corresponding parts of an image to be tested.
In terms of the space-borne SLR data, the NRCS is written as [165]:
)/()( 22220nwnS uEuuF −−=σ (6.4)
where Su is the mean value of the signal amplitude; nu is the pedestal resulting from the
inherent noise of the SLR receive channel; wE - is the mean value of the k-th calibration wedge gradation which, in its magnitude, come very close to the value of the signal amplitude Su being measured; F is the proportionality factor defined by the SLR potential and the surveillance configuration of the surface areas to be explored. The contrast
under measurement is determined as follows: uK
))(())((
2222
2222
nawantst
ntwtnasau uEuu
uEuuK−−−−
= (6.5)
where indexes a, t correspond both to the images with anomalous areas and to the image being tested.
The data on the processed initial radio images are displayed in Figs. 6.4-6.6 in which differently contrasting zones are clearly seen, and the variations in contrast range within each zone are no more than 1.5 dB. Herein one can also see the results of the study into the weather data that had come in at an instant of time when radar measurements were about to be conducted. The weather data indicate the air temperature in and the amount of the precipitation in millimeters in the form of isohyets.
°C
In terms of the analyzed in-situ data, the weather conditions in the southern regions of Ukraine (specifically, the Crimean, Kherson, Donetsk, Dnepropetrovsk and Nikolayev regions) were found to approach the average perennial values and indicate the alternating periods of warm spells and cold snaps with occasional rain/snowfalls. The radar image acquired on December 5, 1983 demonstrated a great spatial homogeneity of imagery brightness. Hence, it follows that the above contrast is taken to be as a test image. In this context, within the limits of a territory being explored the image contrast are no more than 1.5 dB at fixed incidence angles θ . The homogeneous pattern of this image is attributed to the identity of the features of the surface being sensed. These properties are bound to make a significant contribution to a returned signal (here we mean the roughness parameters, physicochemical properties, etc.). In the meantime, this kind of homogeneity indicates that the soil moisture on a territory under study is practically identical, which is accounted for by similar weather conditions.
According to the weather station data provided in early December, the territory of Ukraine found itself exposed to an Arctic air inflow. On December 1-2 the Dnieper right bank area was affected by an anticyclone that brought forth a drop in temperature and a light snowfall in central and southern regions of Ukraine. This period was held to be the coldest one within the month. The low temperatures (ranging between and
) resulted in the soil getting frozen through to a depth of ~15 cm and smoothed out C°− 3
C°− 9

302 spatial moisture variations of the surface layer of the areas under study. The moisture level in frozen loamy types of soils may vary between 4 and 10% at temperatures ranging from
to [261]. C°10 C°0The radar image acquired at night-time on September 8 is noted for the greatest
spatial inhomogeneities of brightness. The picture thus taken is split into sharply outlined boundaries of radar contrasts, which are specified by expression (6.5).
The results from processing the above are displayed in Fig. 4a. The peak contrasts that run up to 8.5 dB as compared to the corresponding areas in the test image are discernible in the southern parts of the Zaporozhye region. As evident from 6.4a, the intensity of returned signal northward and southward of the maximum contrast zones tends to be gradually decreasing. At the same time in the Donetsk, Dnepropetrovsk and Nikolayev regions the contrasts are close to zero values.
а) b)
Fig.6.4. The results from processing the radar images of the southern areas of Ukraine (a) and analytical treatment of weather data (b) as of 07.12.83. Image contrasts: 1 – 0-1.5dB, 2 – 1.5-3dB, 3 – 3.0-4.5dB, 4 – 4.5-6dB, 5 – 6-7.5dB, 6 – 7.5-9dB; 7 – observation points and air temperatures; 8 – isohyets
The concentric disposition of decreasing-contrast zones is in a good correlation
with the amount of precipitation in the territory under study (see Fig.6.4b) by the time the radar surveying operations are carried out.
The snow/rainfalls and the pattern of their distribution are due to the fact that on December 5-6 the anticyclone started breaking up under the impact of low-activity fronts moving from west and north-west. The rainfalls were noted to occur on December 7 in the afternoon. It is exactly over this period that drastic warming-up had been recorded; specifically, within 8 hours the air temperature rose from to and by the time the measurement run had commenced, it reaches
C°7 C°10C°÷+ 61 . The amount of precipitation in
the southern areas of the Zaporozhye region was as high as 5 to 7mm. A combined analysis of radar and weather data suggests that the strongly contrasting features on radar images result from a dramatic increase in the moisture content of the soil surface layer, because the above natural fall-outs came down upon the frozen ground.

303 The radar image acquired on December 8 exhibits the lower radar contrasts and
their mosaic arrangement. The above image was produced within 12 hours and then processed, the results of this operation being shown in Fig. 6.5a. The weather data for this area are presented in Fig.6.5.b.
а) b)
Fig.6.5. The results from processing the radar images of the southern territories of Ukraine (a) and analytically treated weather data (b) as of 08.12.83
What engages our attention is that there is no correlation between the amount of
precipitation and the magnitudes of radar contrasts. As will be apparent from Fig.6.5b, the amount of precipitation in between the measurement runs is indicated: the total amount of rain/snowfall that had occurred at the time of radar sensing can be derived by summing with that of precipitation shown in Fig.6.5b. This process is due to the gradual thawing of the soil at higher temperatures and to the moisture penetrating into deeper layers. These processes resulted in the surface layer moisture getting moderate over the territory to be studied. The maximum radar contrasts of up to 5 dB were recorded in the vicinity of Krivoi Rog where the rains fell upon the frozen soil cover.
The results from the quantitative processing of the radar image acquired on December 28, 1983 and weather measuring data are given in Fig. 6.6. In the radar image one can clearly see a massive spatially homogeneous zone whose contrasts do not exceed 4.5 dB. The areas of maximum contrasts are located in the north-eastern and southern parts of the Kherson and Zaporozhye regions respectively. This pattern of radar contrast spatial distribution is in good correlation with the weather conditions of the territory under examination. During the last week of December, which was preceded by a dry spell of weather, an active altitude frontal rainfall zone was lying over the southern regions of Ukraine. The average day-time air temperature ranged between C°+÷°+ 52 . The amount precipitation in the territory to be explored during 5 days prior to the surveying session varied from 0 to 18 mm depending on a particular area. A slight variation in contrast ranges with the amount of precipitation is primarily accounted for by the fact that rain and snow had been fallen onto warmed-up soil and their intensity was no more than 0.5 mm/h. As a result, it was not possible for the moisture to get accumulated inside a surface soil layer.

304
а b
Fig.6.6. The results from processing the radar images of the southern territories of
Ukraine (a) and analytically treated weather data (b) as of 28.12.83 The magnitudes of measured contrasts provided by radar imagery as a
function of the precipitation amount Q are presented in Fig.6.7. UK
а b
Fig.6.7. Experimental dependencies of the radar contrast upon the amount of precipitation. a – precipitation onto a frozen ground, b – precipitation onto thawed-out soil One group of experimental points (Fig.6.7a) corresponds to the conditions under
which the rain started to fall onto the frozen ground. The other set of points (Fig.6.7.b) typify the variations in the contrast ranges for the precipitations onto the thawed-out

305ground. As seen from Fig.6.7, the rainfall onto the frozen ground tends to enhance the contrast considerably, which is 8.5 dB for the precipitation level of 4 to 6mm. In this instance the soil moisture content may be closer to 100%, which corresponds to the peak value of the contrast relative to the dry ground (or around 12dB for curves 3,4 – Fig. 6.1). At the same time the soil moisture content is 3 to 6% with a variance of values shown in Fig.6.7. As the precipitation level goes up further and the air temperature is noted to be higher, the soil layers tend to thaw-out gradually, and the water thus produced penetrates into the lower layers. The soil surface moisture shows a certain decrease which brings about a reduction radar contrast at Q > 6mm. When the frozen-through ground is completely thawed-out, the drizzle precipitation whose intensity rate was no more than 1mm/h and the air temperature is above zero, give rise to some definite moisture- and heat-exchange conditions. These conditions are apt to keep the soil moisture at a certain stable level, and this particular factor governs virtually invariable contrasts depending upon the rain/snowfall at Q > 8mm.
UK
The rain fallen onto the warmed soil causes the contrast to become more intensified as it comes up from 3 to 4dB at Q ≅ 4mm. As the amount of the precipitation level increases an ambiguity develops. The contrast remains invariable within the same limits of 3dB ≤ UK ≤ 4dB. As seen from Fig.6.1, these values of contrasts indicate that the soil layer moisture increases from 20% to 40%.
In the spring-time the entire territory of Ukraine is practically free from the snow cover that experiences total melting. As it takes place, the wet soil is susceptible to relatively dramatic diurnal variations resulting from the wind effects and solar radiation impact. In the day-time it does not take too long for the soil layer to become dried up. This is clearly exemplified by the images in Fig.6.8. When comparing the images produced on April4, 1996 (see Figs. 6.8a and 6.8b) at 5.30 a/m/ and 17.36 p.m. respectively, one can see that throughout the day the southward boundary of the excessively humidified zone have moved northward for a distance of 60km between the Novaya Kakhovka - Melitopol and Energodar-Zaporozhye lines. Fig.6.9 shows the sectional view (column 904). It indicates that the anomalous radar image contrasts (see Fig.6.8a,b) are primarily caused by an increased content of the surface layer moisture, and in this particular case the minimum soil moisture content was equal to 6dB in relation to the dry soil.
Thus, the studies that had been made suggested that it was quite possible to extract integral data on the spatial distribution of the surface soil layer moisture over the vast areas using the space-borne SLR. The experimental data pertinent to the two instances of agrometeorological conditions (specifically, precipitation onto frozen and warmed soil) are dramatically different. As a consequence, these conditions may well be monitored under the routine surveillance of a specified region.

306
а) b)
Fig.6.8. The EOS "Cosmos-1500" SLR imagery of the anomalous zone dynamics. Shown are the pronounced features of the soil surface moisture; (a – radar image as of 01.04.96, b – as of 04.04.96. The solid line points to the interface of dry (bottom) and wet soil)
Fig.6.9. Relative contrast: dry – wet soil; (line section along column 904 of the image in Fig. 6.8b)

307Snow cover monitoring
A peculiar feature of any snow cover is that its physical properties are most likely to undergo intense spatial variability resulting from macro-, meso- and microscale processes in the atmosphere, the type of land topography, vegetation cover conditions, etc. If one looks into a single climatic region, the snow is seen to get accumulated in a peculiar fashion typical for specific landscape conditions. In this context the vegetation cover that is basically responsible for the snow cover spatial variability is found to be impacted by the above-mentioned process. It is a matter of general knowledge that various types of forest exert a certain influence upon the snow accumulation.
The snow cover thickness is one of the basic parameters, because the latter help establish the close relationship between the snow thickness as it is and the properties of snow itself. Specifically, there is also a definite association with thermal conditions and, as a consequence, with the ability of snow cover to shut off the Earth's surface from environmental exposures. Although the temperature gradients and the resultant metamorphism appear to be more pronounced at a small snow depth, the equal-in-thickness snow cover, which goes through different metamorphism stages, may offer a different temperature regime under similar weather conditions.
Snow is known to posses a variety of physical properties depending upon crystal configurations. As the snow cover becomes compacted, its thickness and heat conduction tend to change. So one has to allow for its properties over the entire period of its existence. Of prime importance are the snow cover formation onset spells during the melting period and especially the period featuring the sharp temperature differences.
The major contribution to the normalized RCS value of the snow-covered Earth surface can be made by the following mechanisms of scattering by: the rough "air-snow" interface, the volume (internal) inhomogeneities of snow and the rough "snow-soil" interface [130]. The relative contribution of the afore-mentioned scattering mechanisms may vary depending upon the factors such as thickness of snow cover and its texture, soil and snow layer temperature and moisture, immediate solar radiation impact, etc. One of the major parameters specifying the way in which radio waves are scattered by the snow cover is the radio wave penetration depth (skin-layer thickness) pδ (1.119).
As it follows from [137], the real part 'ε at a MW-band for dry snow at low temperatures is not virtually temperature- and frequency-dependent, and is a function of snow compactness Sρ with a variation ranging from 2.1'≅ε at to 3/1.0 cmgS ≅ρ
8.2'≅ε at . Compactness3/8.0 cmgS ≅ρ Sρ , in its turn, is governed by the snowfall conditions (specifically, by the wind speed, temperature, etc.) as well as by changes in hydrometeoconditions throughout the whole period between the snow cover formation onset and the start of surveillance operations. Attenuation of radio waves, as they propagate through the snow (when the free moisture is nonexistent), is determined by the loss tangent
εεδ ′′′=tg whose value ranges between and at a frequency of with a temperature varying from
4105 −⋅≅ 4102 −⋅≅GHz10≅ C°− 5 to C°− 30 . Thus, for dry snow the
skin-layer thickness may run up to several meters. If one assumes the volume snow mass inhomogeneities (the elementary scatterers are implied here) to be uniformly distributed in depth, the normalized RCS value closely related to volume scattering is directly proportional to the snow cover thickness (the snow cover being dry and uniform in depth). Scattering by the "air-snow" boundary can be neglected for, at least, two reasons. Firstly, because of the low "contrast" (a jump of 'ε ) at the "air-snow" boundary and, secondly, on account of the relative snow surface "smoothness" at X-band radio waves. As far as the

308 "snow-soil" boundary is concerned, the contribution of this mechanism at low temperatures is likewise substantially reduced, because the values of 'ε of snow and frozen-through soil are close to each other.
As the air temperature and the snow moisture increase (the water is now observed to emerge), the snow absorption tends to grow dramatically (at
and
νm
3/25.0 cmgS ≅ρ %2≅νm at a frequency of 10 GHz, the value of "ε shows a
two-fold increase and comes up to 1.0≅ ). In this case pδ falls to several centimetres. As a result, radio wave scattering by the soil surface becomes completely shielded even with a relatively thin snow cover.
With temperatures changing over from low to higher values and especially during the intensive melt period, the scattered signal level is observed to decrease. This is due to the emergence of vast wet-snow areas with a virtually smooth surface and, particularly, water-soaked areas. The dependence upon the snow cover thickness is then totally smoothed out, because in view of the small value of
0σδ the whole scattering process occurs
in a thin near-surface layer about 1cm thick (for cm3=λ ). Now consider some characteristic aspects of interpreting radar-imaged snow-
covered surface using, as an example, the data on field conditions of the territory of the Eastern Ukraine. These data were collected from EOS SLR "Okean". Fig.6.10 illustrates the radar images of the above-mentioned region, which were acquired in November and December, 1988. The data on the snow cover status were retrieved from the weather station network (see Table 6.1). The eastern territory of Ukraine is characterized by a flat terrain with no large forest tracts and natural steppe vegetation. As evident from Fig.6.10a (31.10.1988), this territory as a whole is seen to be free from the snow cover.
Table 6.1
Temperature of soil and snow cover thickness (November-December, 1988) Weather station
Temperature (numerator) and snow cover thickness (denominator) in cm
days 31.10.1988 16.11.1988 9.12.1988 26.12.1988 Kirovograd Kherson Poltava Sumy Lugansk Zaporozhye Donetsk Dnepropetrovsk
-10/0 -2/0 -7/0 -5/0 -6/0 -6/0
- -6/0
0/1 4/0 0/3 0/2 0/1 2/0 -
3/0
2/0 -2/0 -2/2
-3/10 0/0 -1/0 0/0 -1/1
-6/0.5 -4/0
-13/9 -12/17 -1/4
-10/2 -7/1
-11/9
The radar imagery of this region (see Fig.6.10) is relatively homogeneous, because the settled frosty weather that had persisted for too long caused the soil upper layer to get frozen through and, as a consequence, the normalized RCS value did not undergo any variation because of the moisture effect. The snow cover boundary is observed in the forests west of the towns of Kaluga and Bryansk, and in this case the positive contrast
is on the order of 2 to 4dB. This is in agreement with the results from the analysis thus made and to the data on the normalized RCS of the dry soil area [94], and therefore allows one to argue that the difference between the normalized RCS of
00)( soilsnowdBR σσ −=

309snow and soil is positive, weakly dependent upon grazing angle ψ (or an incidence angle)
and remains within the angle range of to of °20 °70 dBR 5max ≈ (see the upper curve in Fig. 6.11. At the same time the normalized RCS contrast of wet snow in relation to the soil whose volume moisture content of ~ 30% is low and comes up to 14dB in a grazing angle range °> 30ψ (bottom curve).
Fig. 6.10. Radar imagery produced by the "Okean" EOS; а - 31.10.1988; b -
16.11.1988; c - 9.12.1988; d - 26.12.1988
Fig.6.11. Angular dependence of the difference between the normalized RCS of snow and soil

310 The radar imagery is best explained in terms of the data cited above. As shown by
the image produced on November 16, 1988, the snow cover boundary is lying southward of the Dnepropetrovsk-Lugansk line (Fig.6.10a). The thaw spell that was noted to set in resulted in very thin snow layer of ~1 to 3cm thick getting moist. As a consequence, the level of the signal echoed from the moistered soil in the southern areas of Ukraine is higher than that of the snow cover-returned signal by more than 5dB. This is in good agreement with the above-listed values of the attainable contrast.
The radar image acquired on December 9, 1988 highlighted the situation typical for the eastern regions of Ukraine. The thaw period that had spread across the eastern Ukraine on December 5-6 caused the snow cover of less than 10 cm thick northward of the Zaporozhye-Donetsk line (see in Fig.6.10c) to disappear completely. The snow that had become loose and wet at zero temperatures of the soil where the snow cover of ~1 to 3cm thick occupied a vast territory whose northern boundary ran along the Kursk-Sumy line (Fig.6.10c). The snow cover thickness northward above line is more than 10cm. The weaker intensity of the returned signal in the region that is lying southward of the Kursk-Sumy line can be accounted for by the fact that there is no contribution to the total signal of return from the soil because of its significant attenuation in the wet snow. In the region lying northward of the Kursk-Sumy line this contribution appears to be more conspicuous due to the small snow thickness.
A somewhat different situation was seen to reveal itself on December 26, 1988 (see Fig.6.10d). The frosty weather had by then settled throughout the entire territory under study (except for the southern areas of the Crimea). The snow cover thickness was ~20cm. The deep snow boundary was lying westward and north-westward of the Poltava-Kursk line. This is due to an increase in the intensity of returns in this region. The spatial snow cover inhomogeneity is clearly discernible. The thicker snow layers are shown to be far brighter.
Fig.6.12a presents a radar image acquired from the EOS "SICH-1". This image demonstrates a typical situation that had already emerged in the eastern regions of Ukraine in February 1996 (the data on the snow moisture content provided by the local hydrometeocenter are given in Fig.6.12c). The space-based radar monitoring operations were performed in accordance with the government Program for Prevention of Hazardous Aftereffects Caused by the spring-time snow melting. This Disaster Warning Program is called "Povin-96" (or in English "Inundation Events-96"). The thaw spell in its initial phase caused the snow cover to melt down in southern regions of Ukraine. The boundary of its areal extent is clearly seen in the above image. A positive contrast resulting from the reflection from the rough soil surface is lying southward of that boundary. If one looks in the northward direction, the image details appear to be less pronounced, the reason for this effect being the returned-signal attenuation in the wet snow layer 60cm thick. The wet snow zone is stretched up to the Lutsk-Kiev-Kremenchug line.
The northern regions of Ukraine exhibit different weather conditions. In those parts the temperature was not above and the snow cover moisture was more than 40cm. In this zone the crucial scattering mechanism is the volume scattering in the snow. As a consequence, the brightness degree of that portion of the image is as stronger as compared to the snow-covered zone with increased moisture content.
C°0
The processed data pertinent to the above-mentioned areas were used to compile a thematic map of the snow cover extent and those snow-covered patches that contained a varying level of moisture. The map is shown in Fig.6.12b. The results thus obtained are in good agreement with the data of ground-based weather stations and serves as a substantial supplement to them. These stations are relatively sparse round the world. They served to determine the snow cover boundaries and the zones of varying snow moisture with a

311greater accuracy. This kind of information is of considerable interest in terms of making snow melt forecast and the intensity of oncoming flood events.
The radar data acquired from the EOS "SICH-1" SLR in the winter-time was also used to predict the emergency of underflooding events in some areas. As seen from Fig.6.13 (a radar image was acquired February 24, 1996), the light-colored tone points to the frozen-up inundated plains along the Dnieper and Severny Donets rivers. Yet the images produced April 4, 1996 during the spring-time high-water periods in close proximity to the banks of these rivers are marked with a dark-colored tone. The areal extent of the frozen-up inundated plains and the spring-time underflooded areas are virtually coincident.
The spaceborne SLR data processing techniques used to measure the spatial parameters of large-size storage reservoir overflows using the cluster-analysis elements were discussed in [116] and put to an evaluation test as part of the experimental operations aboard the EOS "Cosmos-1500" SLR when the inundation events occurred in the basin of the Amur river in 1994 [171]. An example of how this particular technique was employed to single out the inundated zones in the central part of Ukraine is illustrated in Fig.6.14.
Fig.6.14 presents an image produced by the "SICH-1" SLR on March 21, 1996: a – spring-time image; b – summer-time image; c – interpretation of spring-time image (a). The flood-lands of the Vorskla and Seversky Donetz rivers cannot be visually discriminated in the summer-time image. They are clearly discernible in the spring-time image.
As evident from the analysis of the EOS "SICH-1" SLR images of the Ukraine's territory, which had been acquired at the winter-summer season, the radar survey data allowed one to monitor the dynamics of the snow cover development and to specify the snow melt boundaries. At the same time the ground-based measurements may well prove to be an efficient aid in establishing the severe-event warning service to provide on-line monitoring of snow melt, floods in river basins, underflooding of river banks, etc.
The studies that had been previously made indicated that using the spaceborne SLR's enabled obtaining integral data on the spatial distribution of moisture in the top ground layer. The experimental data obtained for the two types of agrometeorological conditions, i.e. precipitation both onto the frozen and warm ground, are dramatically different. Owing to this these, conditions can be monitored when the particular region is under routine observation.
The radar image examination suggests that radar-derived data are found to be quite efficient in watching the processes of snow cover development and snow melt dynamics, whereas the spatial normalized RSC distribution in the snow-free areas can be used to estimate the soil moisture content, i.e. the initial spring moisture level.

312
а) b)
c)
Fig.6.12. The EOS "SICH-1" SLR image 25.03.96 - (a); thematic map of the snow cover areal extent in Ukraine according to the "SICH-1" data – (b); hydrometeorological center data on the snow moisture content – (c)

313
R.Vorskla R.Vorskla
R.S.DonetsR.S.Donets
R.Dnieper
Dnepropetrovsk Dnepropetrovsk R.Dnieper
24.02.96 04.04.96
Fig.6.13. Radar imagery of the Seversky Donets river basin at the winter-summer season, 1996

314
Vorskla
S. Donets
Dnieper Dnepropetrovsk
а)
Vorskla
S. Donets
Dnieper Dnepropetrovsk
b)

315
Vorskla S. Donets
Dnieper Dnepropetrovsk
c) Fig.6.14. The flooding zones in the Dnieper basin (1996): a – spring-time image; b – summer-time radar image; c – interpretation of image a

316 §6.2 The study of the manifest indications of geological formations and mineral
deposits using multifrequency remote sensing radars
Geophysical prospecting for new mineral deposits is currently of paramount importance and, for that matter, it offers a really big challenge, because the already developed fields are in a state of rapid depletion. The prospecting operations have to be carried out in the remotest and hard-to-reach areas of the Earth, particularly, in deserts, permafrost zones and on littoral shelves. Basically, the prospecting efficiency is largely dependent upon the application of aerospace sensing technology.
Indeed, by now the present-day radar community has gained a good deal of experience in utilizing the multizonal optical pictures and IR-survey data needed for prospecting operations [1]. This type of information that is collected in the course of these operations normally finds an extensive use. The requirements for optical and IR-system parameters (like spectral ranges, sensitivity, etc.), which are to serve the special purposes, have received a wide acceptance and stood the test of time. The indicators that help bring out the manifest signs of mineral deposits are the anomalies experienced by different chemical substances in the soil layers (i.e. methane, ferrous metals, etc.). These abnormal phenomena affect the plants' root system and act as toxicants that disturb the normal photosynthesis in plants, thereby modifying their spectral characteristics. All these changes are believed to be a search criterion for the indicated mineral resources when aerospace spectrometric surveying data are utilized in a visible range. In general, it is not so long that the radar remote sensing systems came to be used for mineral deposits prospecting. Therefore most of the experts who are engaged in a lot of hands-on work are unaware that basically a large number of radars are not suited to make an effective search for mineral deposits. The point is that the parameters were selected in terms of certain approaches that are held to be conventional ones for war-oriented radars. In other words, here we deal with a maximum allowable resolution and the ability to detect small-size targets with relatively high backscattering at maximum distances. As many years of experiments with the "MARS" complex suggested, most of informative features of deposits show a low contrast and are relatively extended in length, particularly, on the sea surface where one can often observe, for instance, the thin surface-active substance (SAS) films. These films are evident indicators of the hydrocarbon fields on a littoral shelf when the SAS find their way into the sea water from the deposits zones, thereby modifying the sea state in a peculiar way. Besides, it is most likely that certain near-surface water layer areas might get saturated with tiny gas bubbles permeating through the fractures in the rock from the deposit zones. These areas also tend to bring about changes in the HF portion of the sea surface roughness spectrum and the measured intensity of the sea surface IR-emission. All this strongly suggests that the spatial resolution of the radar facilities destined for geophysical prospecting should be reduced to 5-10m. Alternatively, the contrast-background sensitivity (i.e. the radar capability to effectively identify slight variations in backscattering intensity) should be maximal: no less than 0.5 to 0.7dB. In this context one thing has to be kept in mind: striving for a maximum resolution of the system will inevitably result in its contrast-background sensitivity being restricted. Most of the radar system developers whose customary practice was to focus their efforts on war-oriented facilities even disregarded the actual parameter of contrast-background sensitivity.
Furthermore, the pattern and the intensity of underwater natural deposit manifestations in the surface sea state is critically dependent upon the intensity of HF spectral components of this particular sea roughness (i.e. eventually, upon the near-sea surface wind). Therefore the findings of our studies have shown that two frequencies need to be used for sea surface sensing. This is especially true of X- and L-bands that can be regarded as optimal ones. These are in fact useful in observing the manifestations of the

317 above deposits over a wide range of sea surface roughness caused by different near-sea surface winds.
Whenever we apply subsurface probing, more dramatic effects are bound to occur, which are not frequently taken into account by radar development designers. The radio waves penetrating into the subsurface soil layer and backscattered hold the certain amount information on both surface structures underlying at a definite depth and on an intermediate soil layer and an air-soil interface. In order to separate these data it is essential to simultaneously use not only the radio waves whose penetrating power may differ fundamentally (by an order of magnitude less) at, say, VHF-, L- and X-bands, but also the optical and IR waves of different bands.
The present section of our Book takes care of an example in which the multifrequency airborne radar complex "MARS" is shown to be employed for detecting and identifying the manifest patterns of geological structures (above all, the fracture structures) under permafrost conditions. Fig.6.15 illustrates the radar imagery of "Severny Bereg" ("Northern Bank") diamond-gold fields located in the Zolotitsa river basin (Arkhangelsk region, Russia). The images were acquired by the "MARS" at X- (a), L- (b) and VHF-bands (c).
Fig.6.15а. The radar imagery of "Severny Bereg" ("Northern Bank") diamond-gold fields located in the Zolotitsa river basin (Arkhangelsk region, Russia). The images were acquired by the "MARS" at X- band

318
Fig.6.15b. The radar imagery of "Severny Bereg" ("Northern Bank") diamond-gold fields located in the Zolotitsa river basin (Arkhangelsk region, Russia). The images were acquired by the "MARS" at L- band
Fig.6.15c. The radar imagery of "Severny Bereg" ("Northern Bank") diamond-gold fields located in the Zolotitsa river basin (Arkhangelsk region, Russia). The images were acquired by the "MARS" at VHF- band (2m)

319 Fig.6.16 presents an interpretation map revealing the manifest patterns of the geological formations of the diamond-and gold-bearing deposits in the Zolotitsa river basin (Arkhangelsk region, Russia). The map constructed by geology expert of the Scientific Center for Aerospace Studies of the Earth of NASU using the "MARS" produced multifrequency imagery.
Fig.6.16. The schematic map of the geological structure of the diamond- and gold-deposits in the Solotitsa river basin. The map was constructed by geology expert using multifrequency radar data. The basic elements of this structure are highlighted: zones of different fractures, lineaments, ring-type structures of different orders
The experts' conclusion that was made in terms of the data obtained following the exploration of the geological structure suggested that the multifrequency radar approach makes it easy to pinpoint the location of the presumed deposits. In addition, it enables one to bring the onground prospecting area to a limited scope, to work out a specific strategy for a new prospecting activity and to assess the pathways of possible ingress of contaminations caused by the mining process. The multifrequency data that are used to good advantage are an efficient aid in cutting down the expenses on preliminary geophysical and geochemical explorations.

320 §6.3 Description of subsurface formation detection procedures using multifrequency
sensing tools
As indicated in Chapter 1, the procedures of subsurface radar probing have been examined analytically and simulated and now there is strong evidence that the radar facilities might as well be used to detect all kinds of man-made buried objects, geological and hydrological structures. We believe that, in this context the multifrequency and multipolarization radar probing technology is an attractive candidate for the simultaneous application of VHF and shorter-wave (i.e. X- and L-) bands. The best results are achieved in arid and other water-deficient areas, because radio waves are capable of penetrating deeper into the soil. These conclusions are borne out by numerous experiments [124-127,140]. Detection of subsurface structures using the X-, L- and VHF-band side-looking radars (SLAR-3, SAR-23 and SAR-180) installed on the airborne remote sensing multifrequency complex "MARS"
Below are shown the results from a special-purpose experiment on detecting subsurface object by means of the radars operating at the afore-mentioned wavelength ranges. The subsurface object (see Figs 6.17-6.21) was a system of interconnected small-size concrete bunkers which, in their turn, are joined to the antenna base plate through a system of cable ducts
The radar imagery thus acquired was utilized to identify the subsurface structures, and the pictures of the above-ground elements were then taken.
Fig.6.17а. The radar image of the area under study was acquired at X-band. Arrow 1 points to the location of the underground object. In the X-band image the surface formations alone, i.e. vegetation, are clearly observable

321
Fig.6.17b. The radar image of the area under study was acquired at L-band. Arrow 1 points to the location of the underground object. In the L-band image one can observe larger-size surface features like man-made structures, bushes, forest, etc. The grasses cover in the vicinity of an object under study is not observable. But the object itself is not seen either
Fig.6.17c. The radar image of the area under study was acquired at VHF-band. Arrow 1 indicates the location of the underground object. In the VHF-band image one can observe subsurface objects, whereas surface formations like the grasses cover, etc. are not observable

322
Fig.6.17d. The topographic map showing a radar surveying area. The position of the underground object is marked off by a cross-like sign Asphalt pavement Metallic main-hole
Concrete bunker Gravel layer Cable duct Concrete bunker Antenna concrete base-plate Fig.6.18. The schematic sketch of the buried object. The object ceased to be operational following the disbandment of one of the Soviet Army units. It comprised: the main bunker lying underground at a depth of 4m; a small-size bunker with a metallic man-hole; a system of cable ducts and a concrete base plate for antenna mast mounting. The surface above the object has an asphalt covering. The total extent of the object is 170m

323
Fig.6.19. An external view of the subsurface object location. An asphalt covering is observable. Thick perennial grass is seen to be growing all around
Fig.6.20. An external view of the antenna mounting base plate

324
Fig.6.21. The interiors of the concrete bunker as viewed from the man-hole. Parts of cables and some equipments, cable ducts, etc. are clearly discernible
The above experiment could be regarded as a bonus in terms of efficiently observing the so-called "powerful" buried structures (lying at a depth of 3 to 4m) through the use of multifrequency radars in the black earth-clay belt area. The impact of the VHF-band radio signal polarization in the radar surveillance of subsurface objects can be illustrated with the images of the area adjacent to the Chertomlyk Station (Dnepropetrovsk region, Ukraine). These images were obtained by the Ka- and X-band SLARs; X- and VHF-band SARs of the "MARS" (see Figs. 6.22a-6.22d) A comparison of the images shown above indicates that radio waves of different bands exhibit a certain distinction in their penetrating power. The pronounced features of subsurface objects are observable in VHF-band radio images (VHF-band SAR, m8.1=λ ). Their location is indicated by the arrows in all images. As evident from the analysis of the simulation experiments (see Chapter 1), these formations show a high contrast in the HH polarization images.

325
а)
b)

326
c)
d)
Fig.6.22. The radar images of the area adjacent to the Chertomlyk station (Dnepropetrovsk region). The images were acquired by Ka-, X-band SLAR; L- and VHF-band SARs of the "MARS". а – VHF-band image in the vertical polarization of a transmitted and received signal (VV); b - VHF-band image in the horizontal polarization of a transmitted and received signal (HH); c – X-band image in the vertical polarization of a transmitted and received signal (VV); d - Ka-band image in the vertical polarization of a transmitted and received signal (VV)

327 CHAPTER 7. ON THE ADVANCES IN THE DESIGN AND DEVELOPMENT OF
RADAR SYSTEM FOR ON-LINE MONITORING OF THE EARTH'S ENVIRONMENT
§7.1 Description of the initial results achieved in the operation of the airborne remote sensing complex, otherwise referred to as the "ARSC-30"
The present section examines not only the special aspects of making an airborne
remote sensing complex (ARSC-30) but also its informative capabilities [148] (see § 2.2). The complex in question was designed and developed in Ukraine. Specifically, it incorporates a series of low-cost remote sensing equipment whose performance characteristics are properly matched. This complex comprises two-frequency radars (Ka-band SLAR and L-band SAR), an IR-scanner, a multichannel video spectrometer, an aerial camera, a GPS receiver, onboard and onground processing packages and a data interpretation facility.
The afore-mentioned complex is installed aboard an AN-30 aircraft (which is under the auspices of the Ministry of Emergency Situations of Ukraine). Its operational goal is to meet the needs for wide-ranging practical and research applications, primarily, to predict the oncoming natural and man-made disasters, to give an advance warning against critical situations, to monitor them as closely as possible, to keep watch on ever-changing environmental conditions as well as search for apparent signs of mineral deposits. The list of other issues to be dealt with can be extended.
As indicated above, the engineering world-wide community has by now seen the advent of a large number of new-brand, high-performance radar-based, infrared and optical systems for remote sensing of the Earth's environment using aerospace carriers. These radar tools have already been described in detail and numerous examples of their utility have been cited. In this context it should be noted that these systems do not seem to be highly competitive with one another. Conversely, they serve as excellent supplementary facilities. The spaceborne remote sensing instruments offer a useful ability to make global observations. They are capable of instantaneously viewing vast hard-to-reach and outlying areas, thereby making it possible to obtain "instantaneous imprints" of diverse global processes across the broad expanses of oceans, in the atmosphere and on any terrain.
At the same time the airborne remote sensing systems may well be used to perform frequent and routine environmental observations. This procedure is vitally important in monitoring highly dynamic processes that may occur following natural and man-made catastrophes (for instance, marine oil spill events, floods, forest fires, etc.). Furthermore, airborne sensing makes it considerably easier for surveying operations to be reliably optimized for altitude, flight direction, incidence angles, etc.
Even though the state-of-the art airborne remote sensing facilities, say, those based on radars, offer some apparent advantages, their functions have so far boiled down to experimental approaches. As a consequence, the real operational resources of these systems cannot be fully utilized in practice, as might be hoped for. There are several reasons behind this, one of them being that most of commercial customers are not aware of real operating potentialities of the above systems. The other most crucial reason is high data acquisition cost. The price of the present-day ARSC is rated to be high because the development of these technically sophisticated systems is bound to incur considerable airborne carrier maintenance expenses. Thus, we think it expedient to keep the scope of applications of the remotely sensed data to a minimum and, accordingly, to render the airborne remote sensing systems performance highly efficient in use and cost-effective.
In order for the remotely sensed data cost to be attractive to commercial customers, it is crucially important to make use of low-price sensing hardware packages. They have to be minimally sufficient in terms of their integrated components, and clearly

328 their operating capabilities are to be stringently compatible with the issues to be resolved. These facilities should be capable of yielding the optimum results, when they are mounted on small-size aircraft whose operating coast is considerably lower as against that of a big-size aircraft.
It is precisely the ARSC-30 that has been developed in line with a minimally sufficient principle resulting in its high efficiency and a relatively low data acquisition cost. Informative capabilities of ACRS-30 and the description of its specific applications
Since the advent of the original ACRS-30 version a few series of overall tests was carried out at the winter and summer seasons. Fig.7.1 vividly illustrates the pattern of sensing the underlying surface through the use of the ACRS-30 facility.
Fig.7.1. Sensing of the underlying surface by means of the ACRS-30 system
Use of the ACRS-30 for monitoring of floods and their aftereffects.
In order to optimize the techniques aimed at utilizing the ACRS-30 in an effort to monitor the floods and their aftermath over a period of 2002 through 2004 the Kalmykov CRSE experts had been engaged in making a series of experiments in different parts of Ukraine.
It is well known that the floods caused by the spring-time snowmelt or by heavy rain/snow falls are certain to do extensive damage to industrial enterprises, ruin dwellings and put the life of numerous human beings in jeopardy in most of the regions of Ukraine. On frequent occasions these calamitous events may become the sort of real devastating natural catastrophes.
Flood control measures taken to avert these adverse processes are bound to attract not only ample material and manpower resources but also operational and dedicated management of these resources depending upon particular, fast-changing situations.
The reliable pieces of information on the developmental stages of the flood events across the vast areas can be effectively collected by using the aerospace remote sensing special-purpose instruments. It should be added that, as the flood processes proceed under the conditions of continuous cloudness, day-and-night pouring rains, special attention is primarily focused upon using the aerospace radar remote sensing facilities that can be operated on a real-time basis regardless of illumination conditions, cloudness, etc. At this

329 modern age the airborne equipment alone could well afford monitoring of these dynamic processes at a rate needed to promptly respond to ever-changing situation through the adequately flexible management of available facilities and rescue parties. The airborne radar remote sensing systems are likewise capable of on-line mapping of flood-caused water extension across the land. The data from step-by-step surveys (made at a required interval) can be used to make a careful assessment of detrimental impacts of these disasters. This allows the restoration work to be carried out using the funds thus raised and material resources to the best advantage. Fig.7.2a,b,c shows an exemplary image acquired following the observation of flooded areas in the Danube river basin near the town of Kiliya. In addition, an optical image is seen to be produced concurrently with a radar image. One can also notice an interpretation map where dry land areas covered with a residual water layer are discernible.
Fig.7.2а. Radar image of flood after-effects in the area of the town of Kiliya. It is acquired by the ACRS-30 SLAR. The arrows indicate some stretches of land surface covered with a residual water layer

330
Fig.7.2b. Interpretation map showing the area of the towns of Kiliya-Kiliya Veke is constructed from the radar survey data. The arrows indicate some stretches of dry land areas covered with a residual water layer
Fig.7.2c. Optical image of flood after-effects in the vicinity of the town of Kiliya, acquired simultaneously with a radar image. Some stretches of dry land covered with a residual water layer are clearly visible

331
Fig. 7.3 a,b,c,d presents an imagery obtained by means of ACRS-30 in the simultaneous observation of the Nezhin district of the Chernigov region close to the village Khorosheye Ozero. The radar surveillance was performed using the SLAR and IR scanner.
The day-and-night exploration of the whole territory was carried out in autumn. The images (see Fig.7.3a) were produced in the day-time; Fig.7.3b,c shows the images acquired at night. The clearly visible features in the above imagery demonstrate that radar and IR data, if used simultaneously, makes it easier not only to promptly detect and map the flood water spread on the land surface but also to spot inundated areas, i.e. zones of dramatic subsurface water rise and top ground layer overwatering. Thus, as will be apparent from Figs 7.3a and 7.3b (showing the day- and night-time IR images of this area) the flood zones are clearly visible (it is indicated by arrows). In the radar imagery one can clearly see that the underflood zones show no variations in the ground vegetation. At the same time there are manifest indications that a certain amount of residual water is likewise visible. The combined use of SLAR and IR data allows the specifically distributed underflooded zones to be reliably mapped. This conclusion is also confirmed by onground measurement data.
Thus, it may be concluded that that basically the ACRS-30 is quite adequate for on-line monitoring of emergency situations of natural origin, and in this context it is common practice for the Ministry of Emergency Situations to tackle urgent problems within the framework of the National Program on Preventation and Response to accidents, catastrophes, etc, in particular, to floods and inundations ("Zapobigannya" Program).
а b
Fig.7.3а,b. IR image of the locality near the village of Khorosheye Ozero (Nezhin district, Chernigov region), acquired by the ACRS-30 in the autumn of 2004. The underflooded zones are clearly visible in the night-time image (indicated by arrows)

332
c
Fig.7.3c. Radar image of the above locality in which one can clearly see no dramatic changes in the ground vegetation around close to the inundated areas. This particular event is confirmed by the apparent indications of inundated areas shown on the IR imagery
d
Fig.7.3d. Map of the locality around the village of Khorosheye Ozero with overlaid images of inundated areas (shown by arrows)

333
The application of the ACRS-30 for monitoring the sea water pollutions caused by oil slicks and other SAS
The on-line surveillance of the oceanic and sea surface with aerospace radar remote sensing facilities being involved is currently most useful in controlling oil spill events and other SAS on the sea surface. The results of the in-depth analysis have already spotlighted the expediency of using these radar systems in an effort to safeguard different territories, both in the open sea or on land, against the adverse effects of man-impacted accidents. Clearly all these measures could be successful in terms of immediately detecting and tracking these situations, and, above all, of identifying those held responsible for marine pollution.
A good deal of dedicated work on studying the oil slick problems and the impact of other SAS has been carried out for years by the Kalmykov CRSE experts using a variety of aerospace carriers including the ACRS-30 (see Fig.7.4). The findings of their research effort provide compelling evidence that these aerospace systems are capable of effectively coping with the specific tasks assigned by the Ministry for Emergency Situations as regards the response to disastrous oil spills caused by tanker accidents. These steps were taken in conformity with the national program referred to as "Zapobigannya" ("Prevention").
The afore-mentioned radar facilities also offer an excellent advantage of monitoring the sea surface state. Incidentally, they are under the jurisdiction of the basin-oriented Inspection of the Ministry for Environmental Resources. The experimental monitoring of the Black Sea environmental regimen in the Odessa-Ilychevsk area was carried out under the auspices of the Inspection for the Black Sea Environmental Protection in Odessa (which, in its turn, is under the Supervision of the Ministry for Environmental Resources of Ukraine. The remotely sensed data were highly appreciated and endorsed by the leading experts and the managerial agencies of the Inspection. The application of the ACRS-30 to monitoring the operational conditions of different conveying pipes (specifically, those for oil and oil delivery).
One of the stunning developments that have been recently recorded in Ukraine was that a number of local underhand entities had been caught in act of "cleaning out" oil and gas products from the main supply pipelines in a secret way or, to put it more aptly, "on the quiet". By and large it has become a customary practice in Ukraine to punch special holes in the pipes with a view of pumping out a certain amount of oil and gas flowing through its territory to meet ever-increasing need for fuels. These criminal acts of an illegal "hookup" are still being implemented on an unprecedented scale. According to some tentative estimates, the annual volumes of the "secretly stolen" oil and other petroleum products run up to hundreds of tons. Therefore, it was highly important to work out the techniques for a prompt detection of the suspicious points where alternative pipes were stubbed in and to have these acts of embezzlement immediately done away with.
The very procedure for efficiently spotting the illegal tapping points is quite a challenge, because those who display a good deal of ingenuity in terms of surreptitiously pumping out the fuels are constantly perfecting their techniques. Since they are into that sort of business, considerable resources are made available to all of them, let alone up-to-date equipment including night vision devices, purpose-oriented transport facilities. On frequent occasions, the tapping procedure is accomplished in several steps. At the very outset one team of perpetrators gets busy with digging through the ground to approach the sought pipe stealthily. After a little while the other team punches out a hole, sets up a bulk-head union, and later at nightfall the pumping-out operations may get off to a sudden start. Just within that span of time dozens of gas-tank trucks are being filled up, and each move

334
of those involved in these dishonest operations is closely supervised. Each tapping point is heavily guarded to make sure that everything is all right and the whole job is done without a hitch. Nowadays an extensive use is made of hard-alloy punchers with connecting pipes as well as the plastic hoses that cannot be spotted using metal detectors right from the ground surface. The tapping points are carefully covered up. At the same time the pipeline pressure gauges that help indicate the drop in pressure, as the fuel is being drawn away, are put out of order well in advance. As the practical experience suggests, using the typical surveillance methods from the ground surface only 10% of illegal tappings can be detected.
The optimize the up-to-date methods for a prompt detection of apparent preparatory measures for the pipelines to be holed secretly, to detect masked long-term illegal hookups and to identify the crowded transport vehicles like gasoline trucks, etc. and their movement the Kalmykov CRSE experts had suggested an integrated observation technique involving the use of the ACRS-30 and terrain-following subterranean radar. In this context, the ACRS-30 tools are employed to detect not only the indirect signs (or suspicious-looking sites) of preparations for tapping procedures (i.e. freshly dug-out holes, ditches, etc.) but also transport facilities moving around by night in close proximity to pipelines when the pumping-out operations are well under way.
As the terrain is being probed with the above-mentioned radars to detect all suspicious points (this operation had been previously carried out with the ACRS-30), the insertion points, plastic tubes and hoses used for illegal pumping-over operations are ultimately detected.
To streamline the proposed techniques for detecting illegal tappings and to prevent the oil products from being "stolen" in the above-described fashion, a series of pioneering experiments had been carried out. Figs 7.5a,b and 7.6a,b demonstrate the original examples of detecting the apparent presence of illegal insertions through the use of optical and IR devices. It was later found that the shadowed portion of the optical image of the area around the ditch, where the plastic hose had been laid, in resulted from the moisture being accumulated in that particular ditch, which appeared to be safely covered up and virtually unseen from the ground surface. The hose stretched for more than 300m and ran out to the opposite side of the grove where the gasoline truck fuelling operations were performed.
Even the pioneering trials of the first-ever designed version of the ACRS-30 have shown compelling evidence to support its relatively high informative capabilities (given a fairly low cost of retrieved data) in terms of tackling the issues associated with prevention of natural and anthropogenic disasters, environmental monitoring, etc.

335
а
b
Fig.7.4. а – radar image in the open-water area of the port Ilyichevsk. The image was obtained by the SLR ACRS-30. The marine oil spills are clearly visible (shown by arrows). The sea surface pollution liability is imposed upon the vessels lying at anchor in the port area (vessels №1, 2, 3). b - a videophotograph of the open-water area of the port, where the SAS spills are visible
.

336
Fig.7.5а. Optical image showing the apparent signs of illegal tapping of the supply pipeline. It was later found that the shadowed portion of the optical image of the area around the ditch, where the plastic hose had been laid in, resulted from the moisture being accumulated in that particular ditch, which appeared to be safely covered up and virtually unseen from the ground surface. The hose stretched for more than 300m and ran out to the opposite side of the grove where the gasoline truck fuelling operations were performed
Fig.7.5b. IR image of the illegal tapping site

337
Fig.7.6а. In-situ obtained image of the place where the covered-up fuel-pumping hose was laid in (shown by arrows). This area is not virtually seen from the ground surface
Fig.7.6b. The results from computer-processed information provided by the terrain-following subsurface radar (which has been developed by the Usikov Institute for Radiophysics and Electronics of NASU). The radar image displays the location of the covered-up hose (shown by an arrow)

338
§7.2 The prospects for further development of spaceborne radar facilities for on-line remote sensing of the Earth in Ukraine. In lieu of the conclusion
The radar remote sensing community has by now gained quite an experience in developing and applying the aerospace technology for the Earth's natural environment to be adequately viewed and sensed by means of satellite-based devices. The knowledge the remote sensing researchers has acquired about the space observation of the sea and land features of the Earth enabled them to make considerable progress in this field of engineering activity. Dozens of different aerospace remote sensing systems were designed and developed, and later tested under service conditions. Now there is strong evidence that these remote sensing complexes could find ambitious applications. They ranged from collecting intelligence data to forestalling natural disasters and even mineral prospecting operations.
However, although the well-tried remote sensing radar systems offer self-evident advantages and their usefulness is indisputable, most of them cannot be fully relied on in terms of their efficient performance. This is particularly true of the operational system intended to avert catastrophic events and critical situations of natural and man-made origin. The reason why these systems may not be so productive, as one would expect, is that they are rather sophisticated in design and their components are rated to be high-priced.
Basically, in order to have the remotely sensed data updated in the interval on the order of units of hours it is necessary that at least 4 or 4 remote sensing systems stay in orbit and operate in a swath of no less than 500 to 700km wide. Incidentally, the above data update period is in fact indispensable for a prompt detection and prevention of hazardous events such as tropical cyclones, hurricanes, typhoons, etc. It is amply evident that if the afore-mentioned remote sensing system incorporates the ENVISAT or RADARSAT satellites actively involved in sensing operations, then the data retrieval cost is most likely to become prohibitive. Note that physically the ENVISAT facility is more advanced, but in value terms it is worth around $ 2.5 billion whereas the RADARSAT system is worth some $ 1.0 billion.
Thus, it should be stressed that, unless the price of space-borne remote sensing complexes is substantially reduced an adequate and cost-effective worldwide system for on-line monitoring of natural and man-made disasters will never be devised. Therefore nowadays most of the top experts involved in radar-based remote sensing of the Earth's natural environment turn their minds to developing novel, far cheaper systems that could well be mounted on small-size satellites. At the same time the ratings of the above satellites were expected to ensure a more efficient output of required data.
A unique experience our domestic institutions had been gathering for years from strenuous development efforts and the long-standing exploitation of the EOS "Cosmos-1500"/"Okean"/"SICH" SLRs gives a sort of clue to resolving this particular issue. Specifically, the space-based radar remote sensing systems should be purpose-oriented in terms of optimizing their performance characteristics relative to well-defined objectives.
By way of example, the global system for monitoring of hazardous events in the ocean-atmosphere system can be set up to advantage if it makes sense to use side-looking real-aperture (antenna) wide-swath radars rather than expensive and sophisticated SAR facilities. As an illustrative version, we will further consider the SLR project, which we have presented, with a total swath width of 1400km (two swath widths of 700km each being simultaneously used to the left and the right of the flight path). It is exactly due to the state-of-the-art technologies that the actual cost of the SLR facility will be hundred times lower than that of the up-to-date SAR system. The above SLR will be mounted on a small-size man-made satellite and operated in a continuous survey mode, with remotely sensed

339
and onboard processed data being downlinked. Note that the optical and IR remote sensing NOAA satellite systems are currently in operation. The SLR data will be immediately made available on-line to an unlimited number of users. The spaceborne cluster of 3 or 4 satellites carrying the similar SLRs will be able to provide information about the oncoming atmospheric hazards with the data updates obtained at a 3-4 hour interval. In this way, that low-cost and readily available data will be used on a large scale. When the satellite-and SLR-derived and spaceborne sensors-gathered data are simultaneously utilized, the reliability of in-coming information will increase, and the range of environment-related parameters will be extended. This integrated approach to applying the above data will make it possible to monitor these parameters both in the energy transfer from the ocean to the atmosphere (note that the SLR can identify the wind-induced sea roughness intensity). The IR and optical scanners of the NOAA satellites are capable of measuring the surface temperature and the cloudness parameters, i.e. the amount of the energy released into the atmosphere when the moisture is being evaporated from the sea/ocean surface during the condensation. Below are listed a series of performance data pertinent to the above-mentioned space-based SLR that will operate in a continuous mode. The operational features of this particular SLR are described in the project we have submitted. Fig.7.7 depicts the structural layout of the EOS incorporating the SLR (in this representation we can observe a simplified version of a single-swath mode for the SLR in question). Table 7.1 presents its major performance characteristics as against those of the EOS "Cosmos-1500"/"Okean"/"SICH" SLRs.
Fig.7.7. Structural layout of the EOS incorporating the SLR that will operate in a continuous mode. 1 – antenna mirror (a cutout part of the parabolic cylinder); 2 – antenna feeds (H, V polarizations); 3 – EOS hermetically sealed unit

340
Table 7.1 Key performance characteristics of the SLR that will operate in a continuous mode and the SLR of the EOS "Cosmos-1500"/"Okean"/"SICH" type
Parameter Continuous operation SLR
SLR of the EOS "Cosmos-1500"/"Okean"/"SICH" type
Wavelength, cm 3.2 3.2 Polarization Vertical,
horizontal Vertical
Minimal detectable NRCS, dB - 22 - 22 Contrast-background sensitivity, dB
1 - 2
3 - 5 Swath width, km 1400 = (2х700) 475 (700 for "SICH-1М") Resolution, km 0.8 – 2.0 1.4 – 3.3 Power consumption, Wt 120 600 Total weight including antennas, Kg 130 350 Continuous operation time Continuous 10-min sessions with no
less 40 min intervals
The Kalmykov CRSE experts had submitted the project on the development space-based SLR incorporating the SLR wideband capabilities (the SLR parameters are listed above) as well as the low-cost high-resolution SAR operating in a 15 to 20km swath width, which can be redirected in coverage of 300km wide. The SAR facility provides for onground data handling. This type of a radar system will be useful in tackling a broad range of issues relevant to global monitoring of hazardous events in the ocean-atmosphere system. At the same time using this complex would provide for a close observation of the regions lying at a distance of 2000 km from the receiving center located in the territory of Ukraine (note: the relay satellites are not involved in this operation). The pilot studies indicate that, physically, both the SLR and SAR can be accommodated on a single EOS. A distinctive feature of this approach is the use of an integrated antenna configuration for the SLR and SAR. The design of this system becomes considerably simplified. Appendix 2 examines the peculiar features of the antenna systems for the above-mentioned radars.

341 REFERENCES 1. Kronberg P. Fernerkundung der Erde. Grundlagen und Methoden des Remote Sensing
in der Geologie: Translation from German. Moscow: Publishing house "Мir",1988. -343 p. (in Russian).
2. Radar studying of the sea roughness. Edited by S.Ya. Braude. Kiev: Published by АS of the USSR, 1962. –116 p. (in Russian).
3. Rozenberg А.D., Оstrovsky I.Ye., Kalmykov А.I. Frequency shift under scattering of the radio emanation on the roughness sea surface // Izv. vuzov. Radiophyzika. -1966. -Vol.9, №2.-P. 234 – 240 (in Russian).
4. Rozenberg А.D., Kalmykov А.I., Zeldis V.I. The acoustic wave backscattering on the correct ripples // Izv. vuzov. Radiophyzika. –1967.-Vol.10, №6. -P.789-802 (in Russian).
5. Kalmykov А.I., Оstrovsky I.Ye., Rozenberg А.D., Fuks I.М. On the influence of the sea surface structure to the spatial parameters of the scattered radio emanation // Izv. vuzov. Radiophyzika. -1965. -Vol.8, №6. -P.1117 – 1127 (in Russian).
6. Zamarayev B.D., Kalmykov А.I. On the possibility of the spatial structure of the sea surface roughness determination by radar method // Izvestiya АS of the USSR. Phyzika atmosphery i okeana. -1969. -Vol.5, №1. -P.124-127 (in Russian).
7. Bass F.G., Fuks I.M., Kalmykov A.I., Ostrovsky I.E., Rosenberg A.D. Very high frequency radio waves scattering by a disturbed sea surface. P.1 // IEEE Trans. Antennas and Prop. -1968. -AP-14. -P.743-754.
8. Bass F.G., Fuks I.M. Wave scattering on the statistically irregular surface. Мoscow.: Publishing house "Nauka", 1972.-424 p. (in Russian).
9. Childs W.H.J. Physical constants. Translation from English. Moscow: Publishing house "Physmatgiz", 1962. – 80 p. (in Russian).
10. Landau L.D., Livshiz I. М. Electrodynamics of the continuums. Moscow: Publishing house "Physmatgiz",1959. – 532 p. (in Russian).
11. Roll G.U. Physics of the atmospheric processes under sea. Leningrad: Publishing house "Hydrometizdat", 1968. – 400 p. (in Russian).
12. Phillips O.M. The dynamics of the upper ocean. Translation from English. Moscow: Publishing house "Мir", 1969.- 238 p. (in Russian).
13. Ulaby F.T. ,Moor R.K., Fung A.K. Microwave Remote Sensing, v.3.- Artech House , 1986.- 2162 p.
14. LeBlond P.H., Mysak L.A. Waves in the ocean, p.2. Translation from English. Moscow: Publishing house "Мir", 1981.- 366 p. (in Russian).
15. Fung A.K., Lee K.K. A Semi-Empirical Sea-Spectrum Model for Scattering Coefficient Estimation // IEEE J. Oceanic Eng. –1982. -OE-7. P.166-176.
16. Cox C. S., Munk W.H. Statistics of the sea surface derived from sun glitter // J. Mar. Res. –1954. - Vol.13. P.198-227.
17. Monin А.S., Yaglom А.М. Statistical hydromechanics, p.1. Мoscow: Publishing house "Nauka", 1965.- 640 p. (in Russian).
18. Alpert Ya.L., Ginzburg V.L., Feynberg Е.L. Propagation of the radio waves. Moscow: Publishing house "GITTL", 1953. – 884 p. (in Russian).
19. Born М., Wolf E. Fundamental optics. Мoscow: Publishing house "Nauka", 1976.- 856 p. (in Russian).
20. Minakov А.А., Tyrnov О.F. Statistical radiophysics. Kharkov: Published by KhNU, 2003. – 540 p. (in Russian).
21. Fridrihsberg D.А. Сolloid chemistry course. Leningrad: Publishing house "Chimiya",1984.-368 p. (in Russian).

342 22. Lamb G. Hydrodynamics. Moscow-Leningrad: Publishing house "GITTL", 1953. -928
p. (in Russian). 23. Galayev Yu.М., Kalmykov А.I., Kurekin А.S., Lementa Yu.А., Nelepo B.А.,
Ostrovsky I.Е, Pichugin А.P., Pustovoytenko V.V., Terehin Yu.V. Radar detections of the oil contaminations on the sea surface // Izvestiya АS of the USSR. Phyzika atmosphery i okeana.-1977. -Vol.13, № 4, -P.406-414 (in Russian).
24. Levich V.G. Physicochemical hydrodynamics. Moscow: Publishing house "GITTL", 1959.-669 p. (in Russian).
25. Boyev А.G., Karvitsky G.E. To the theory of the sea roughness radar contrast in the presence of the SAS film // Radiophyzika i radioastronomiya.-1997. –Vol.2, № 3. P. 281-291 (in Russian).
26. Boyev А.G., Karvitsky G.E., Matveyev А.Ya., Tsymbal V.N. Evaluation of oil film parameters on the sea surface using multifrequency radar data// Radiophyzika i radioastronomiya.–1998. –Vol.3, № 1. -P.43-48 (in Russian).
27. Dobryansky А.F. The chemistry of the oil. Moscow: Publishing house "Gostehizdat", 1961. -211 p. (in Russian).
28. Adam N.К. Physics and chemistry of the surfaces. Moscow: Publishing house "Gostehizdat", 1947.-552 p. (in Russian).
29. Adamson А. Physical chemistry of the surfaces. Moscow: Publishing house "Мir", 1979. -568 p. (in Russian).
30. Landau L.D., Livshiz I. М. Mechanics of the continuums. Moscow: Publishing house "GITTL". - 1953. -788 p. (in Russian).
31. Boyev А.G., Yasnitskaya N.N. Damping factor of the surface waves under a finite hydrodynamic thickness film of the surface-active substance // Prikladna gidromehanika. –2002. -Vol.4 , № 4. -P.14 – 22 (in Russian).
32. Boyev А.G., Yasnitskaya N.N. Sea-wave suppression by a finite-thickness film of a surface-active matter // Izvestiya RAS. Phyzika atmosphery i okeana. –2003. Vol.39, № 1. -P.132- 141 (in Russian).
33. Loytsyansky L.G. Boundary laminar layer. Moscow: Publishing house "Physmatgiz", 1962. -480 p. (in Russian)
34. Subbotina Ye.P. Collected book of the physical constants and parameters. Leningrad: Published by LNU, 1967. -148 p. (in Russian).
35. Kalmykov A.I., Pichugin A.P., Shestopalov V.P. Some Features of Radar Monitoring of the Oceanic Surface from Aerospace Platforms // Int. J. Remote Sensing. - 1982. - .Vol.3, № 3. -P. 311-325.
36. Doronin Yu.P. Thermal interaction of the atmosphere and hydrosphere. Leningrad: Publishing house "Hydrometizdat", 1969. -210 p. (in Russian).
37. Kotlyakov V.M. Antarctica snow cover and its role in the recent continent freezing. Moscow: Published by АS of the USSR, 1961.-246 p. (in Russian).
38. Dynamics of the snow and ice masses. Translation from English. Leningrad: Publishing house "Hydrometizdat", 1985. -456 p. (in Russian).
39. Zubov N.N. Arctic ice. Moskow: Publishing house "Glavsevmorputi", 1945.-360 p. (in Russian).
40. Bogorodsky V.V., Gavrilo V.P. The ice. Physical characteristics. Present glaciology methods. Leningrad: Publishing house "Hydrometizdat", 1980.-383 p. (in Russian).
41. Doronin Yu.P. Heysin D.Ye. Sea ice. Leningrad: Publishing house "Hydrometizdat", 1975.-318 p. (in Russian).
42. Paunder E. Ice physics. Moscow: Publishing house "Мir", 1967.-250 p. (in Russian). 43. Shuleykin V.V. Sea physics. Мoscow: Publishing house "Nauka", 1968.-1083 p. (in
Russian).

343 44. Doronin Yu.P. Atmosphere and ocean interaction. Leningrad: Publishing house
"Hydrometizdat", 1981. -278 p. (in Russian). 45. Khohlov G.P. Physicochemical characteristics of the upper layers of different age ice
in the SP-22 area // Proceedings of AA SRI, Vol.359. Leningrad: Publishing house "Hydrometizdat", 1978. -P.4-12 (in Russian).
46. Untersteiner N. Natural Desalination and Equilibrium Salinity Profile of Perennial Sea Ice // J.Geophys.Res. -1968. –Vol.73, N4. -P.1251-1257.
47. Lake R.A., Lewis E.L. Salt Rejection by Sea Ice during Growths // J.Geophys. Res.-1970.-Vol.75, N3. -P.583-597.
48. Sea ice nomenclature. Ice map legends. Leningrad: Publishing house "Hydrometizdat", 1974.-76 p. (in Russian).
49. Bushuyev A.V., Volkov N.A., Loshchilov V.S. Atlas of ice formations. Leningrad: Publishing house "Hydrometizdat", 1974.-138 p. (in Russian).
50. International symbolism for sea ice maps and sea ice nomenclature: Edited by B.A. Krutskih. Leningrad: Publishing house "Hydrometizdat",1984.- 56 p. (in Russian).
51. Grishchenko V.D. Morphology of the ice surfaces in the Arctic basin. Proceedings of the AA SRI, Vol.303. Leningrad: Publishing house "Hydrometizdat",1978.-P.13-19 (in Russian).
52. Nazintsev Yu.L. On the snow accumulation on the Kara Sea ices // Proceedings of the AA SRI, Vol.303. - Leningrad: Publishing house "Hydrometizdat",1971.-P.185-190 (in Russian).
53. Bogorodsky V.V., Khohlov G.P. Association of the electrical parameters of the upper layers of the arctic drift-ice with temperature and salinity in the microwave range // Proceedings of the AA SRI, Vol.359. Leningrad: Publishing house "Hydrometizdat", 1978. -P.13-19 (in Russian).
54. Bogorodsky V.V., Khohlov G.P. Electrical ice parameters at the edge zone of the Bering Sea at the frequency 10GGz // Soviet-American experiment "Bering". Leningrad: Publishing house "Hydrometizdat", 1975. -P.219-233 (in Russian).
55. Gumming W.A. The dielectric properties of sea ice and snow at 3.2 centimeter // J. Appl. Phys. -1952. –Vol.23,N7. -P.768-773.
56. Hoekstra P., Cappillino P. Dielectric properties chloride ice at UHV and microwave frequncy // J.Geophys. Res. -1971. –Vol.76, N20.-P.4922-4931.
57. Vont, Ramseir R.O., Makios V. The complex-dielectric constant of sea ice at frequencies in the range 0,1-40 GHz // J.Appl.Phys. -1978. -Vol.49, N3. -P.1264-1280.
58. Bogorodsky V.V., Khohlov G.P. Basic features of the vertical electrical structure at the upper layers of the arctic drift-ice in the microwave range // Proceedings of the AA SRI, Vol.359. Leningrad: Publishing house "Hydrometizdat",1978.-P.27-35 (in Russian).
59. Bogorodsky V.V., Khohlov G.P. On the fine electrical structure at the upper layers of the arctic drift-ice // Proceedings of the AA SRI, Vol.359. Leningrad: Publishing house "Hydrometizdat", 1978. -P.20-26 (in Russian).
60. Radar methods of the Earth investigation / Yu.А.Melnik, S.G. Zubkovich, V.D.Stepanenko et al. / Edited by Yu.А. Melnik. Мoscow: Publishing house "Sovetskoye radio", 1980. -264 p. (in Russian).
61. Armand N.A., Basharinov A.Ye., Shutko A.M. Environmental researches by using radiophysical methods. // Izv. vuzov. Radiophyzika.–1977.-Vol.20, N6. -P.809-841 (in Russian).
62. Satellite microwave remote sensing / Ed. by T.D. Allan. - Chichester: Ellis Horwood, 1983.-526 p.
63. Efimov V.B., Gavrilenko А.S., Kalmykov А.I. et al. Investigation possibilities of the ice covers by using radiophysical methods from the aerospace carriers // XIV All-

344 Union conference on the radio waves propagation: Thesis's of the reports. Мoscow: Publishing house "Nauka".-1984, Vol.2.-P.191-193 (in Russian).
64. Microwave Signatures of First-Year and Multiyear Sea Ice/ P.Gloersen, W.Nordberger, T.I.Schmugge, T.T.Wilheit // J. Geoph. Res.-1973.-Vol.78, N18. -P. 3564-3572.
65. Ramseier R.O., Gray L., Campbell W.J. Scatterometer and imaging radar results obtained over Big Bear, AIDJEX, 1975 // Proc. Sympos. on sea ice proces. and models.-1977. -Vol.1. -P.30-40.
66. Surfacebased scatterometer results of Arctic sea ice/ R.G.Onstott, R.K.Moore, W.F.Weeks et al. // IEEE Trans. Geosci.Electronic.-1979.-GE-17, N3.-P.78-85.
67. Zubkovich S.G. Statistical characteristics of the radio signals reflected by earth surface. Мoscow: Publishing house "Sovetskoye radio",1968.-224 p. (in Russian).
68. Rous J.W. Arctic ice type identification by Radar // Proc. IEEE.-1969.-Vol.57, N4. -P.605-614.
69. Onstott R.G., Moore R.K., Gogineni S., Delker C. Four Years of Low Altitude Sea Ice Broad Band Backscatter Measurements // IEEE J.Oceanic Engin. - 1982. - Vol.QE-7, №1. - Р.44-50.
70. Ice cover investigations by using side looking radar stations (SLR) / A.V. Bushuev, Yu.D. Bychenkov, V.S. Loshchilov, A.D. Masanov. Leningrad: Publishing house "Hydrometizdat", 1985. -264 p. (in Russian).
71. Gurvich A.S., Kalinin B.I., Matveyev D.T. Influence of the internal glacier structure to its thermal radiation // Izvestiya АS of the USSR. Phyzika atmosphery i okeana. -1973.-Vol.9, N12.-P.1247-1256 (in Russian).
72. Brehovskih V.L., Tatarsky V.I. On the thermal radiation of the random-inhomogeneity mediums// Izvestiya АS of the USSR. Phyzika atmosphery i okeana. -1977. -Vol.13, N2. -P.144-152 (in Russian).
73. Parashar S.K., Fung A.K., Moore R.K. A theory of wave scatter from an inhomogeneous medium with a slightly rough boundary and its application to the ice// Remote Sensing of Environment.-1978. -N7. -P.37-50.
74. Fung A.K., Chen M.E. Emission from an inhomogeneous layer with irregular interfaces // Radio Science.-1981.-Vol.16, N3.- P.289-297.
75. Bass F.G., Synitsin Yu.A. On a radio wave scattering at the ice covers// Izv. vuzov. Radiophyzika.-1983.-Vol.26, N6.-P.746-755 (in Russian).
76. Thang L., Kubasci M.S., Kong I.A. Radiative transfer theory for active remote sensing of a layer of small ellipsoidal scatterers // Radio Science.-1981.-Vol.16, N3.-p.321-329.
77. Rayzer V.Yu., Zaytseva I.G., Aniskevich V.M., Etkin V.S. The physical parameters of the sea ice determination by using remote data of the microwave measured in the range 0.3-18cm// Issledovaniye Zemli iz Kosmosa.-1985.-N1.-P.23-31 (in Russian).
78. Synitsin Yu.A. To the theory of the radio wave scattering by stratified inhomogeneity medium with statistical irregular boundaries // Izv. vuzov. Radiophyzika.-1984.-Vol.27, N10.-P.1256-1266 (in Russian).
79. Tymchenko A.I., Synitsin Yu.A., Efimov V.B. Modeling of the radio wave scattering by ice sheets processes // Izv. vuzov. Radiophyzika.-1985. –Vol.28, N7. -P.816-822 (in Russian).
80. Tymchenko A.I. Electromagnetic radiation scattering by inhomogeneity ice layer with a rough boundaries // Izv. vuzov. Radiophyzika.-1986.-Vol.29, N1.-P.55-61 (in Russian).
81. Burtsev A.I., Nazirov M., Nikitin P.A. et all. Arctic and Antarctica radar maps according to EOS "Cosmos-1500" data and preliminary results of their analysis// Issledovaniye Zemli iz Kosmosa. -1985. -N3. -P.54-63 (in Russian).

345 82. Nikitin P.A. On the radar reflection characteristics of the sea ice // Proceedings of the
"GosNIITsIPR". Leningrad: Publishing house "Hydrometizdat", 1986.- Num.25. -P.85-92 (in Russian).
83. Tsang L., Kong J.A. Emissivity of half-space random media // Radio Science.-1976.-Vol.11, N7.-P.593-598.
84. Kondratyev К.Ya., Kozoderov V.V., Fedchenko P.P. Aerospace investigations of the soils and vegetation. Leningrad: Publishing house "Hydrometizdat", 1986.-229p. (in Russian).
85. Ishimaru А. Wave propagation and scattering in random inhomogeneous media. Translation from English. Vol.2. Moscow: Publishing house "Мir", 1981.- 317p. (in Russian).
86. Kulemin G. R., Shcherbinin I. V., Yatsevich S. E. et. al. Physical Principles of Microwave Remote Sensing of Terrains // Proc. of the 6th physics international school “Microwave physics and technique” –Varna(Bulgaria). - World Scientific Publ. Co. Singapore, Utopia Press.-2-7 Oct. 1989, -P.16-33.
87. Chen M.F., Fung A.K. A numerical study of the regions of validity of the Kirhhoff and small perturbation rough surface scattering models // Radio Science.-1988.-Vol.23, №2. –P.163-170.
88. Engman E.T., Wang J.R. Evaluation roughness models of radar backscatter // Proceedings of IGARSS’86. -1986. - P.1097-1101.
89. Kalmykov А.I., Fuks I.М. Models of the radio wave scattering by underlying surface and their taking into account in the radar remote sensing systems // Radiophysika i radioastronomiya. – 1996. –Vol.1, №1. –P.31-41. (in Russian).
90. Fuks I.М. Dispersion dependences and inverse problem of the scattering on the feebly rough surface // Izv. vuzov. Radiophyzika. -1985. -Vol.28, №2. -P. 16-125 (in Russian).
91. Voronovich А.G. Low tilt approach in the theory of radio wave scattering by irregular surfaces // Published by "ZhETPh".- Vol.89, №1(7). -P.116-125 (in Russian).
92. Isers A.B., Puzenko A.A. and Fuks I.M. The local perturbations method of solving the problem of diffraction from surface with small slop irregularities // J. of Electromag. Waves and Appl.- 1991. - Vol.5, №12. - P.1410-1435.
93. Fung А. К., Eom H. J. A theory of wave scattering from a inhomogeneous layers with on irregular interface // IEEE Trans. Ant. Propag. -1981. - №6. -P.899-910.
94. Kulemin G.P., Pazskazovsky V.B. Scattering of the millimeter radio waves by the Earth surface under small angles. Kiev: Publishing house "Nauk. Dumka". -1987.- 230 p. (in Russian).
95. Wang J. R. The Dielectric Properties of Soilwater at Microwave Frequencies // Radio Science. -1980. -Vol.5, N 15. -P.977-985.
96. Ulaby F.T., Batlivala P.P., Dobson M.C. Microwave Backscatter Dependence on Surface Roughness, Soil Moisture, and Soil Texture: Part I. - Bare Soil // IEEE Transactions on Geoscience Electronics. - 1978. - Vol.GE-16, No.4. - P.286-295.
97. Ulaby F.T., Aslam A., Dobson M.C. Effects of vegetation cover on the radar sensitivity to soil moisture. // IEEE Trans. Geosc. Remote Sens. -1982. -Vol.20, №2. -P.476–481.
98. Hallikainen M. T., Ulaby F. T., Dobson M. S., EI-Rayes, Lin-Kun Wu. Microwave dielectric behavior of Wet soil // IEEE Trans. Geosc. Remote Sens. -1985. –Vol.23, №I. -P.25-34.
99. Zerdyev N.G., Kulemin G.P. Soil moisture definition by using multichannel radar methods// Issledovaniye Zemli iz Kosmosa. –1993. -№1. –P.90-95. (in Russian).
100. Ulaby F. Т. Radar signatures of terrain: useful monitors of renewable Resources // IEEE Proceedings. –1982. -Vol.70, N 12. -P.1410-1428.
101. Trevet J..W. Imaging for resource serveys. London, N. Y.: Chapman and Hall, -1986.

346 -313p.
102. Kalmykov А. I., Timchenko А. I., Shcherbinin I. V. Possibilities of the underground objects investigations by using radar sensing: Preprint / АS of the USSR. Institute Radiophysics and Electronics; № 90-13. – Kharkov: 1999. -25p. (in Russian).
103. Bryuhovezky А.S. RCS of the rough- stratified soil in the Born approximation of the theory small disturbances // Proceedings "Application of the millimeter and submillimeter radio waves / Institute Radiophysics and Electronics АS of the USSR. -1990. – P.8-19 (in Russian).
104. Attema E.P.W., Ulaby F.T. Vegetation modeled as a water cloud // Radio Science, -1978. -№13(2). -P.357-364.
105. Hoekman D.H., Krul L., Attema E.P.W. A multilayer model for radar backscattering from vegetation canopies, Digest, II Annual Int. G.S & R.S. Symposium, Munich. -1982. -Vol.II. -P.4.1-4.7.
106. Ulaby. F.T., Wilson E.W. Relation the microwave backscattering coefficient to leaf area index // Rem.Sens. of Env. -1984. -№14. -P.113-133.
107. Dobson M.C and Ulaby F.T. Preliminary evaluation of the SIR-B response to soil moisture, surface roughness, and crop canopy cover // IEEE Trans. Geosc. Remote Sensing. –1986.- Vol.GE-24, №4. –P.517-526.
108. Dobson M.C, Kouyate F. and Ulaby F.T A reexamination of soil textural affects on microvawe emission and backscattering. // IEEE Trans. Geosc. Remote Sensing. – 1984. – Vol.GE- 22. –P.530-535.
109. Ulaby F.T., Moore R.K. and Fung A.K. Microwave remote sensing: active and passive. Vol.II / Addison-Wesley Publishing Company Inc., Reading, MA. –1982. -607 p.
110. Eom H.J. Regression models for vegetation radar-backscattering and radiometric emission. // Remote Sensing of Environment. – 1986. –N19. –P.151-157.
111. Fung A. Kand, Eom H.J. Scattering from random layer with applications to snow vegetation and sea ice // IEEE Proceedings. –1983. –130. -Part F, №7. –P.591-600.
112. Yakovlev V.P. On the radiometers and radars possibilities of remote sensing on the underlying surface// Proceedings of the "GosNIITsIPR". Leningrad: Publishing house "Hydrometizdat". – 1986.- Num.26. - P. 27-31 (in Russian).
113. Zotova E.N. and Geller A.G. Soil moisture content estimation by radar survey data during the sowing campaign // Int. J. Remote Sensing.- 1985. – Vol.6, №2. –P.353-364 (in Russian).
114. Schmugge T.J. and Jackson T.J. Calculations of radar backscattering coefficient of vegetation covered soils // Remote Sensing of Environment. –1984. –N15. –P.119-133.
115. Ulaby F.T. Vegetation clutter model // IEEE Trans. Ant. Prop.- 1986. –N19. -P.151-157.
116. Kulemin G.P., Kharchenko Т.N., Yatsevich S.Ye. Snow remote sensing by using radar methods. Preprint/ АS of the USSR. Institute Radiophysics and Electronics; №92-8. –Kharkov: 1992. -36p. (in Russian).
117. Ulaby F.T , Stiles W.H., Abdelrazik M. Snowscower influence on backscattering from terrain // IEEE Trans. Geocsi. Remote Sens. –1984. - Vol. GE-22, №2. -P.126-132.
118. Ulaby F.T., Stiles W.H. The active and passive microwave response to snow parameters: part 2- water equivalent of dry snow // J. Geoph. Res.- 1980. – Vol. 85. -№2. -P.116-122.
119. Ulaby F.T., Stiles W.H. Radar observations of snowpacks // Proс. Microwave Remote Sens. Of snowpack properties workshop.- 1980, Fort Collins, -60.-Р.86-90.
120. Ulaby F.T., Stiles W.H. Microwave response of snow // Adv. Space Res.-1981. -Vol.1. -Р.131-149.
121. Williams L.D., Gallagher J.G., Sugden D.E., Birnie R.V. Surfase snow properties

347 effects on millimeter-wave backscatter // IEEE Trans. Geosc. Remote Sens. -1988. -Vol.GE-26, №3. -Р.300-306.
122. Williams L.D., Galagher J.O. The relation of millimeter-wavelength backscatter to surfase snow properties // IEEE Trans. Geosc. Remote Sens.- 1987. – Vol.GE-25, №2. -Р.188-194.
123. Finkelshtein М.I., Mendelson V.L., Kutyev V.А. Radiolocation of the irregular earth covers. Мoscow: Publishing house "Sov. Radio", 1977. -174 p. (in Russian).
124. McCanley J.F., Shaber G.G., Breed C.S. et al. Subsurface valleys and geoarcheology of eastern Sahara revealed by Shuttle radar // Science. -1982. -Vol. 218, N4576. -P.1004-1020.
125. Elashi C., Roth L.E. and Schaber G.G. Spaceborne radar subsurface imaging in hyperarid regions // IEEE Trans. Geosci. Remote Sensing.-1986.-Vol.GE-22, N4.-P.383-387.
126. Berlin G.L.,Tarabzonni M.A., Al.Naser A.H. et al. SIR-B subsurface imaging of a sand-buried landscape: Al Laban Plateau, Saudi Arabia // IEEE Trans. Geosci. Remote Sensing.-1986. – Vol.GE-24, N4.-P.595-602.
127. Kalmykov А.I., Fuks I.М., Tsymbal V.N. et all. The radar observations of the strong reflectors lying under soil layer. Subsurface reflections model: Preprint/ АS of the USSR. Institute Radiophysics and Electronics; №93-6.-Kharkov, 1993.-30 p. (in Russian).
128. Bryuhovezky А.S. Incoherent scattering of the radio waves by the rough-irregular soil. Born approximation for RCS // Inter-departmental science-technical conference «Statistical methods and data process systems for remote sensing of environment»: Thesis of report (Мinsk, 1-3 November 1989) Мinsk. Published by "BNU", 1989 (in Russian).
129. Zavorotny V.U., Tatarsky V.I. Amplification backscattering wave effect on the object lying in the vicinity of the two mediums random interface. // Reports of the AS of the USSR. –1982. –Vol. 265, №3. –P.608-611 (in Russian).
130. Hoekstra P., Delaney A. Dielectric properties of soils at UHF and microwave frequencies // J.Geophys.Res. –1974. –Vol. 79, N11, -P.1699-1708.
131. Leshchinsky Yu.М., Lebedeva G.N., Shumilin V.D. Electrical characteristics of the sandy and clay soils in the centimetric, decimetric and metric waves // Izv. vuzov. Radiophysika. –1971. –Vol.14, №4. –P.562-569 (in Russian).
132. Skolnik M.I. Radar Handbook. McGraw Hill Book Company, 1970. 133. Hovanessian S.A. Introduction to Synthetic Array and Imaging Radars. Artech House
Inc., 1980. 134. Elachi Ch. Spaceborne Radar Remote Sensing Applications and Techniques. IEEE,
New York, 1987. 135. Kalmykov А.I., Kurekin А.S., Efimov V.B. et al. Side looking radar EOS "Cosmos-
1500" //Issledovaniya Zemli iz Kosmosa. -1985. -№3. -P.76-83 (in Russian). 136. Kalmykov А.I., Efimov V.B., Kavelin S.S. et al. Radar system EOS "Cosmos-1500" //
Issledovaniya Zemli iz Kosmosa. -1984. -№5. P.84-93 (in Russian). 137. Gavrilenko А.S., Kryzhanovsky V.V., Kulechov Yu.А. et all. Radiophysical complex
for remote sensing of environment: Preprint/ АS of the USSR. Institute Radiophysics and Electronics; № 321. -Kharkov: 1986. -39 p. (in Russian).
138. Kalmykov А.I., Pichugin А.P., Sinitsyn Yu.А. et al. Handling features of radar information on the earth surface by using aerospace carriers // Issledovaniya Zemli iz Kosmosa. – 1983. -№6. –P.91-96 (in Russian).
139. Shestopalov V.P., Khmyrov B.Ye., Kalmykov А.I. et al. Full-scale radiophysical investigations of ice covers // Reports of the AS of the USSR. -1983. -Vol. 272, №3. -P.598-600 (in Russian).

348 140. Kalmykov A.I., Tsymbal V.N., Matveev А.Ya., Gavrilenko A.S., Igolkin V.V. The
Two-Frequency Multipolarisation L/VHF Airborne SAR for Subsurface Sensing// AE International Journal of Electronics and Communications. Archiv für Electronik und
U&&U&& bertragunstechnik. -1996.- Vol.50, No 2. - P. 145-149.
141. Kalmykov A.I., Tsymbal V.N., Kurekin А.S., Efimov V.B., Matveyev А.Ya., Gavrilenko А.S., Igolkin V.V. Multipurpose airborne radar system for Earth investigations "MARS" //Radiophysika I Radioastronomiya. -1998. -Vol.3, №2.-P.119- 129 (in Russian).
142. Matveev A.Ya., Tsymbal V.N., Gavrilenko A.S., Logvinenko A.I., Bychkov D.M. Peculiarities of the Calibration Methods for Air- and Spaceborne Synthetic Aperture Radar Systems//Proc. European Conf. on Synthetic Aperture Radar, EUSAR'96: 26-28 March 1996. - Konigswinter (Germany). -VDE-VERLAG GMBH *Berlin*Offenbach. - P. 511-514.
143. Kalmykov A.I., Tsymbal V.N., Blinlkov А.N., Kurekin А.S., Kulemin G.P. Multipurpose airborne radar complex for Earth investigations: Preprint/ АS of the USSR. Institute Radiophysics and Electronics; №90-21. -Харьков: 1990. -35 p. (in Russian).
144. Kalmikov A.I., Blinkov A.N., Sytnik O.V., .Igolkin V.V., Kachanov A.S., Kulemin G.P., Matveev A.I., Charlamov V.I. A multi-purpose radar system for remote sensing of the Earth: General concept//Proc.of the 6th physics international school "Microwave physics and technique". - Varna(Bulgaria).- World Scientific Publ.Co.Singapore, Utopia Press. -2-7 Oct. 1989. -P. 34-50.
145. Dranovsky V.I., Kavelin S.S., Kalmykov А.I., Kurekin А.S., Matveyev А.Ya., Saltykov Yu.D., Tsymbal V.N. Spaceborne multipurpose radar system for environment remote sensing OCEAN-U // Proceedings of the international science seminar on the aerospace monitoring of earth covers and atmosphere. Kiev 24-28 May 1993. – Published by Knowledge Society of the Ukraine. - Kiev. -1993. - P. 85-87 (in Russian).
146. Multipurpose system for radar sensing of the Earth environment from the space. Basis parameters select and designing proposal / Kalmykov A.I., Tsymbal V.N., Blinlkov А.N. et all. Мoskow: Published by "VINITI", 1988. - 99 p. (in Russian).
147. Matveyev А.Ya. SAR combine calibration // Collected reports III All-Russian science conference “Remote radiophysical methods application for the environment investigations”, 17-18 June, 1999. - Murom (Russia). -1999. -P. 145-146 (in Russian).
148. Tsymbal V.М., Lyalko V.І, Kurekin О.S., Gavrilenko О.S. Airborne complex ACRS-30 for remote sensing of the environment //Kosmichna nauka i tekhnologiya. – 2002. – Vol.8, №2/3. – P.36-40 (in Russian).
149. Yevdokimov А.P., Kryzhanovsky V.V. New way in array antenna technics / Izvestiya vuzov. Radioelektronika. -1996. Vol. 39, № 9. P. 54-61 (in Russian).
150. Yevdokimov А.P., Kryzhanovsky V.V. Planar array antennas with cosecant beam shape in the 8-mm range// Published by "IPRZh"«Elektromagnitnye volny i elektronnye cictemy». -2003. -Vol.8,N10. -P.52-58 (in Russian).
151. R.Kyun. Microwave antennas. Leningrad: Published by "Sudostroyeniye", 1967.– 518p. (in Russian).
152. Drabkin А.L., Zuzenko V.L., Kislov А.G. Antenna-feeder facilities. Мoscow: Publishing house "Sovetskoye radio", 1974. – 536p. (in Russian).
153. Theoretical and experimental investigations of the remote sensing of the earth covers problems by using SAR systems: Research report "Karta-B" SRW (final). Scientific supervisor Kalmykov А.I., responsible investigator Sytnik О.V. / Institute for Radiophysics and Electronics of the AS of the Ukraine; №01.86.0081353.⎯ Kharkov, 1990. ⎯ 201p. (in Russian).

349 154. Kalmykov А.I., Synitsin Yu.А., Sytnik О.V., Tsymbal B.N. The informativity ot the
spaceborne remote sensing radar systems // Izvestiya vuzov USSR. Radiophysika. ⎯1989. ⎯Vol.32, №9. ⎯P. 1055⎯1062 (in Russian).
155. Drabkin М.О. The estimation methods of the remote sensing data potential comprehension // Proceedings "Gos NITsIPR". Leningrad: Publishing house "Hydrometizdat".⎯1986.⎯ Num.26.⎯ P.39⎯47 (in Russian).
156. Frost V.S., Shanmugan K.S. Information Content of Synthetic Aperture Radar Images of Terrian // IEEE Trans.⎯ 1983.⎯ Vol.AES-19, №4.⎯ P.768⎯774.
157. Moore R.K., Fung A.K. Radar Determination of Wind at Sea // Proc. IEEE.⎯1979.⎯ Vol.67,N12.⎯ P.1504⎯1521.
158. Kalmykov А.I., Sytnik О.V., Tsymbal V.N. Analysis of the multipurpose radar systems for the spaceborne remote sensing of the Earth abilities // Izvestiya vuzov USSR. Radioelektronika. ⎯ 1992. ⎯ Vol.35,№4. ⎯ P.18 ⎯ 25 (in Russian).
159. Van Tris G. Theory of detection, estimation and modulation in the 4 books: Transl. from English. Moscow: Publishing house "Sovetskoye Radio". ⎯ 1972. ⎯Vol.1. ⎯744p. (in Russian).
160. Prudnikov А.P., Brychkov Yu.А., Marichev О.I. Integrals and rows. Moscow: Publishing house "Nauka", 1981.⎯798p. (in Russian).
161. Prudnikov А.P., Brychkov Yu.А., Marichev О.I. Integrals and rows. Special functions. Moscow: Publishing house "Nauka", 1983.⎯752p. (in Russian).
162. Prudnikov А.P., Brychkov Yu.А., Marichev О.I. Integrals and rows Additional chapters. Moscow: Publishing house "Nauka", 1986.⎯800p. (in Russian).
163. Raney R.K. Review of Spaceborne and Airborne SAR Systems // Fundamentals and Special Problems of Synshetic Aperture Radar (SAR). AGARD Lecture Series 182. - North Atlantic Treaty Organization, Neuilly-Sur-Sene, France. -1992.- ISBN 92-835-0683-9. - P.11-1 -11-18.
164. Kazma A., Nichols A.D., Rawson R.F., Haney C.W., Shanne Jr J.J. Multifrequency-Polarimetric SAR for Remote Sensing // Proc. IGARSS'86 Symposium, Zürich, 8-11 Sept. –1986. –P.715-719.
165. Maeda K., Kitazawa F., Kodaira N. SAR-580 Experiments in Japan // Proc. 14th Int. Symp. Space Technol. and Sci., Tokyo, May 27 –June 1. – 1984. – P.1291-1299.
166. Belokurov А.А., Glybovsky S.I. Methods and facilities for calibration of the radar system for remote system of the Earth // Zarubezhnaya radioelectronika. - 1990. -№2. -P.19-31 (in Russian).
167. Freeman A. SAR Calibration: An Overview // IEEE Transactions on Geoscience and Remote Sensing. - 1992. - vol.30, No.6. - P.1107-1121.
168. Brunfeldt D.R., Ulaby F.T. Active Reflector for Radar Calibration // IEEE Transactions on Geoscience and Remote Sensing. - 1984. - vol. GE-22, No.2. - P.165-169.
169. Kasischke E.S., Fowler G.W., Wackerman C.C. A Statistical Model for Prediction of Precision and Accuracies of Radar Scattering Coefficient Measurements Derived from SAR Date // Proc. IEEE Nat. Radar Conf., Ann Arbor, Mich, Apr.20-21. - New York (N.Y.).-1988.- P.115 - 117.
170. Larson R.W., Jackson P.L., Kasischke E.S. A Digital Calibration Method for Synthetic Aрerture Radar Systems // IEEE Transactions on Geoscience and Remote Sensing. - 1988. - Vol.26, No.6. - P.753-763.
171. Radiolocation of the Earth surface from the space / Nazirov М., Pichugin А.P., Spiridonov Yu.G. et al. / Edited by L.M. Mytnik, S.V. Vyktorov. Leningrad: Publishing house "Hydrometizdat", 1990. - 200 p. (in Russian).

350 172. Kulemin G.P., Kurekin А.S. Influence of the propagation condition on the calibration
accuracy of the remote sensing radars. // Collected reports”Airborne radar systems” – Kharkov Aviation Institute, Kharkov, -1991.-P.86-95 (in Russian).
173. Matveyev А.Ya. SAR combine calibration // Collected reports III All-Russian science conference “Remote radiophysical methods application by the environment investigations”, 17-18 June, 1999. - Murom (Russia). -1999. -P. 145-146 (in Russian).
174. Sun G., Simonett D.S. A Composite L-Band HH Radar Backscattering Model for Coniferous Forest Stands // Photogrammetric Engineering & Remote Sensing. - 1988. - Vol. 54, №8. - P.1195-1201.
175. Pichugin А.P., Pustovoytenko V.V., Fetisov А.B. et all. On-line processing of the radar data at the spaceboard EOS "Cosmos-1500"//Issledovaniye Zemli iz Kosmosa. -1985. -№3. -P. 93 – 102 (in Russian).
176. Dremlyug I.V. Investigations of the clouds images, acquired by EOS, for updating of the near surface wind and roughness forecasting //In the book: Noncontact methods for measure of the oceanographic parameters. Leningrad: Publishing house "Hydrometizdat", 1984. -P. 130—134 (in Russian).
177. Chan Н. L., Fung А. К. A theory of sea scatter at large incident angles// J. Geophys. Res. -1977. -Vol. 82, № 24. -P. 3439—3444.
178. Kalmykov А. I., Pichugin А. P., Tsymbal V. N. Near surface wind determination by the side looking radar system EOS "Cosmos-1500" // Issledovaniye Zemli iz Kosmosa. -1985. -№ 4. -P. 65—77.
179. Pierson W. J. The measurement of the synoptic scale wind over the ocean//J. Geophys. Rev. -1983. -Vol. 88,No. C3. -P. 1683—1708.
180. Minina L. S. Nephanalysis practice. Leningrad: Publishing house "Hydrometizdat", 1970.—336 p. (in Russian).
181. Space data application guide in the analysis and weather forecast / Edited by I. P. Vetlov, N. F. Veltishchev. Leningrad: Publishing house "Hydrometizdat", 1982. - 300 p. (in Russian).
182. Mytnik L.М., Desyatova G. I., Kovbasyuk V.V. Analysis of the macro- and mesoscale wave field roughness features that is observed at the radar images of the EOS "Cosmos-1500"// Issledovaniye Zemli iz Kosmosa. -1986. -№ 2. -P. 21—31 (in Russian).
183. Masterskih М.А. On the baric gradients in the narrow bands of the cold fronts // Meteorologiya i gydrologiya. -1980. -№ 8. -P. 102—104 (in Russian).
184. Kalmykov А. I., Pichugin А. P., Tsymbal V. N., Shestopalov V.P. Radiophysical observations from the space of the mesoscale formations on the ocean surface // Reports of the AS of the USSR. -1984. -Vol. 279, № 4. P. 860—862.
185. Pohil А. E. On the identification of the storm roughness and calm zones in the Pacific by using satellite cloudness images // Meteorologiya i gydrologiya. -1985. -№ 12. -P. 68—76 (in Russian).
186. Veltishchev N. F., Zhelnin А. А., Ugryumova G. V. Experiments on the computational modeling of the convection in the blast wind vertical displacement // Proceedings of the "Hydromettsentr USSR". -1973.Vol. 110. P. 48—56 (in Russian).
187. Agee Е. М. Mesoscale cellular convection over the ocean // Dynamics Atmos. Oceans. -1987. -Vol. 10, No. 4. P. 317—341.
188. Veltishchev N. F Theory of the mesoscale convective systems in the atmosphere observing from the Earth satellites // Thesis for a Doctor's degree. –Мoscow: Published by "Hydromettsentr USSR". -1979. — 395 p. (in Russian).
189. Chou S.H., Atlas D. Satellite estimates of ocean-air heat fluxes during cold air outbreaks // Monthly Weather Rev. -1982. -Vol. 110, No. 10. -P. 1434-1450.

351 190. Huh O. K., Rouse L. J., Jr., Walker N. D. Cold air outbreaks over the Northwest
Florida continental shelf: heat flux processes and hydrographic changes // J. Geophys. Res. -1984. -Vol. 89, No.C1. -P. 717—726.
191. Kalmykov А. I., Nazirov М., Nykitin П. А., Spiridonov Yu. G. On the ordered mesoscale formations on the ocean surface that is detected by using space radar data // Issledovaniye Zemli iz Kosmosa. -1985. -№ 3. -P. 41—47 (in Russian).
192. Velichko S.А., Kalmykov А. I., Synitsin Yu.A. et all. Radar investigations of the mesoscale interaction processes "ocean-atmosphere" from the aerospace carriers // Reports of the AS of the USSR. -1989.-Vol.308,N2. -P.353—357 (in Russian).
193. A.I.Kalmykov, S.A.Velichko, V.N.Tsymbal et. al. Observations of the Marine Environment from Spaceborne Side-Looking Real Aperture Radars // Remote sens. Envir. -1993. -Vol.45. -P.193—208.
194. Hain А.P., Sutyrin G.G. Tropical cyclones and their interaction with ocean. Leningrad: Publishing house "Hydrometizdat", 1983. -272 p. (in Russian).
195. Kalmykov А. I., Tsymbal V. N. Using radar space information for studying the hear surface field // In the book: Methodical instructions on the complex application the space information for seas studying. Leningrad: Publishing house "Hydrometizdat", 1987. -P. 100—136. (in Russian).
196. Вlack P.G., Gentry R.C., Cardone V.J., Hawkins J.D. SEASAT microwave wind and rain observations in severe tropical and midlatitude marine storms // Advances Geophys. -1985. -Vol. 27. -P.197—277
197. Shenk W. E., Vоnder Haar T. M, Smith W. L. An evaluation of observations from satellites for the study and prediction of mesoscale events and cyclone events // Bull. Amer. Meteorol. Soc. -1987. Vol. 68, No. 1. -P. 21—35.
198. Lawrence M. В., Clark G. В. Atlantic hurricane season of 1984 // Monthly Weather Rev. -1985. Vol. 113, No. 7. P. 1228—1237.
199. Bluestein H.B., Marks F. D. On the structure of the eyewall of hurricane Diana 1984: comparison of radar and visual characteristics // Monthly Weather Rev. -1987. -Vol. 115, No. 10. -P.2542—2552.
200. Pichugin А. P., Spiridonov Yu. G. Space structure of the precipitation zones on the space radar images // Issledovaniye Zemli iz Kosmosa. -1985. -№ 2. -P.20—28 (in Russian).
201. Utkin V. F., Shestopalov V. P., Kalmykov А. I. et al. Possibilities of the tropical cyclone characteristics determination by space radar images // Reports of the AS of the USSR. -1986. -№ 2. -P.331—333 (in Russian).
202. Shuleykin V. V. Formation and attenuation of the tropical hurricane in the difference thermal conditions // Izvestiya АS of the USSR. Phyzika atmosphery i okeana. -1972. Vol. 8, № 1. P.3—16. (in Russian).
203. Hain А. P. Mathematical modeling of the tropical cyclones. Leningrad: Publishing house "Hydrometizdat", 1984.—247p. (in Russian).
204. Components of the Black Sea satellite monitoring (Ukrainian contribution in the Black Sea GOOS): Preprint / NAS of the Ukraine. МNI. Edited by Korotayev G.K. et all.. - Sevastopol: 2001. – 116p. (in Russian).
205. Galayev Yu.M., Kalmykov A.I., Efimov V.B. et al. Energetic characteristics and features of the radar reflection by sea surface at the small incidence angles // Electromagnetic wave scattering. Num.2. -Taganrog, TRTI: 1978. -P.97-103 (in Russian).
206. Bogorodsky V.V., Khohlov G.P. Effective electrical parameters of the initial sea ice cover and nilas types //Zhurnal tehnicheskoy physiki. -1977. -Vol.47, N6. -P.1294-1300 (in Russian).

352 207. Rabinovich Yu.I., Loshchilov V.S., Shulgina Ye.M. The analysis of the measurements
results of the ice cover parameters // Soviet – American experiment "Bering". Leningrad: Publishing house "Hydrometizdat", 1975.-P.294-313 (in Russian).
208. Bogorodsky V.V., Darovskih A.N., Spytsin V.A., Khohlov G.P. Thermal reflection investigations of the one-year arctic ice covers taking into account real distribution throughout their thickness the temperature and electrical parameters // Proceedings of the "AA NII",Vol.379. Leningrad: Publishing house "Hydrometizdat",1983.-P.26-34 (in Russian).
209. Kalmykov A.I., Pichugin A.P. Detecting features of the sea surface inhomogeneities by radar method // Izvestiya АS of the USSR. Phyzika atmosphery i okeana..-1981. -Vol.17, №7. P.754-761 (in Russian).
210. Sea ice remote investigations by complex radar-radiometer method/ A.S.Gavrilenko, V.B.Efimov, A.I.Kalmykov et al.//Noncontact methods and facilities for measuring oceanographically parameters.5-th All-Union seminar (Moskow,1983):Collected reports.-Moscow: Moscow department of the Publishing house "Hydrometizdat",1986.-P.130-134 (in Russian).
211. Efimov V.B., Kalmykov A.I., Komyak V.A. et. al. Ice cover investigations by radiophysical facilities from aerospace carriers // Izvestiya АS of the USSR. Phyzika atmosphery i okeana..- 1985. -Vol.21, N5. -P.512-520 (in Russian).
212. Asmus V.V., Yelensky L.V., Efimov V.B. et all. Digital processing of the radar images that is acquired from the EOS "Cosmos-1500" // Proceedings of the "GosNIITsIPR". Leningrad: Publishing house "Hydrometizdat", 1986. -Num.25. -P.37-57 (in Russian).
213. Pasynkov V.V., Khohlov G.P. Frequency and thermal-salinity dependencies of the electromagnetic wave specific normalized attenuation by the arctic ice in wavelength range 0.7-20cm// Proceedings of the "AA NII". -Vol.379. Leningrad: Publishing house "Hydrometizdat", 1983.- P.26-35 (in Russian).
214. Bass F.G. Boundary conditions for average electromagnetically field with random irregularity and impedance fluctuations // Izvestiya vuzov. Radiophysika. -1960.-Vol.3, N1.-P.72-78 (in Russian).
215. Bass F.G. Radio wave propagation above statistical irregularity surface // Izvestiya vuzov. Radiophysika. -1961.-Vol.4,N3.- P.476-483 (in Russian).
216. Feynberg Ye.P. Radio wave propagation along ground surface. Moscow: Published by АS of the USSR,1961.-546 p. (in Russian).
217. Kopilovich L.Ye., Fuks I.M. Scattering indicatrix and reflectance of the strongly rough surfaces // Izvestiya vuzov. Radiophysika.- 1981.-Vol.24,N7.-P. 840-850 (in Russian).
218. Fuks I.M. Structure function of the moon relief by radar data // Izvestiya vuzov. Radiophysika. -1983.-Vol.26, N10.- P.1194-1204 (in Russian).
219. Brehovskih L.M. Waves in the stratified mediums. Moscow: Publishing house of the AS of the USSR, 1957. - 502 p. (in Russian).
220. Pichugin А.P., Yelensky L.V., Efimov V.B. et al. Digital processing features of the radar images that are obtained by SLR EOS "Cosmos-1500". // Issledovaniye Zemli iz Kosmosa. –1984. -№6. -P.82-90 (in Russian).
221. Doronin Yu.P. Design procedure of the ice thickness and temperature estimation// Proceedings of the "AA NII",Vol.267. Leningrad: Publishing house "Hydrometizdat",1964.-P.127-142 (in Russian).
222. Buynitsky V.Kh. Sea ice and icebergs in the Arctic zone. Leningrad: Publishing house of the LNU, 1973. -255 p. (in Russian).

353 223. Efimov V.B., Komyak V.A., Kurekin A.S. et al. Investigations of the antarctic ice
covers state by radiophysical facilities // Issledovaniye Zemli iz Kosmosa.-1990.- N4.-P.3-11 (in Russian).
224. Efimov V.B., Komyak V.A., Kurekin A.S. et al. Influence of the ice cover internal structure on the radar signal parameters //XV All-Union conference on the waves propagation.: Thesis of reports. Moscow: Publishing house "Nauka", 1987. -P.406. (in Russian).
225. Yefimov V.B., Kalmykov I.A., Timchenko A.I., Yacevich S.E.. The features of radar observation of snow cover from the satellite «Sith-1» // Proc. 27th International Symposium on Remote Sensing of Environment June-8-12, 1998,Tromso (Norway). -1995. -P.338-342.
226. Efimov V.B., Komyak V.A., Kurekin A.S. et al. Application of the space radiolocation of the Earth in the hydrometeorology // Kosmichnа Nauka ta tekhnologiya. -2000. –Vol. 6, №5/6. - P.16-28 (in Russian).
227. Kalmykov A.I., Efimov V.B., Kurekin A.S. et al. Radar multifrequency diagnostic of the sea ice for navigation safety and nature management in the Arctic and Antarctic zones//International science seminar on the aerospace monitoring of earth covers and atmosphere (Kiev 24-28 May 1993). Thesis of reports: Published by Knowledge Society of the Ukraine. - Kiev. - 1993.- P.33-36 (in Russian).
228. Scheuchl B., Hajnsek I., and Cumming I. Model Based Sea Ice Classification Using Polarimetric SAR Data// Proc.IGARSS’02. -2002.
229. Ferro-Famil L., Pottier E., and Lee J.S. Unsupervised Classification of Multifrequency and Fully Polarimetric SAR Images Based on the H/A/Alpha-Wishart Classifier // IEEE Trans.Geosci. Remote Sensing. -2001. -Vol. 39, No. 11. -P. 2332-2342.
230. Impact of the large-scale internal waves to the sea surface: Proceedings of the Applied Physics Institute of the AS of the USSR".- Gorky,1982. -231 p. (in Russian).
231. Elachi C., Cimino J., Crauser J. Monit. Earth’s Ocean, Land, and Atoms. Space Sens., Syst. and Appl.- New York, N.Y.,1985. -P.634-683.
232. Tomiyasu K. Tutorial Review of Synthetic-Aperture Radars (SAR) with Applications to Imaging of Ocean Surface // Proc.IEEE. -1978. -Vol.66, №5. -P. 563-583.
233. Becker R. Coast guard evaluates oil spill detection schemes // Microwaves. – 1972. – May. – P.12-14.
234. Pilon R.O., Purves C.G. Radar Imagery of Oil Slicks // IEEE Trans. Aerospace and Electronic Systems. – September 1973. – Vol. AES-9, No.5. – P.630-636.
235. Krishen K. Detection of oil spills using 13.3 GHz radar scatterometer // J. Geophys. Res. – 1973. - Vol. 78. - P. 1952-1963.
236. Eklund F., Nilsson, Blomquist A. False alarm risks at radar detection of oil spill // Proc. URSI Specialist Meeting on Scatter and Emission from the Earth. – Univ. of Bern Institute of Applied Physics, Bern, Switzerland. - Sept. 1974.
237. Pronk A.C. Remote sensing of oil pollution at the sea surface II – damping of water waves by an oil layer as a possible indicator for SLAR observations // NIWARDS Pub. No.22, Netherlands Interdepartmental Working Community for the Application of Remote Sensing Techniques. – July 1975.
238. Kraus S.P., Esten J.E., Atwater S.G., Jensen J.R., Volimers R.R. Radar detection of surface oil slicks // Photogrammetric Eng. Remote Sensing. – 1977. –Vol.43. – P. 1523-1531.
239. Johnson J.W. and Croswell W.F. Characteristics of 13.9 Ghz radar scattering from oil films on the sea surface // Radio Science. -1982. -Vol.17, №3. P.611-617.
240. Boyev A.G., Karvitsky G.E., Matveyev A.Ya. Tsymbal V.N. Evaluation of Oil Film Parameters on the Sea Surface Using Multifrequency Radar Date // Telecommunications and Radio Engineering. - 1997. - Vol.51, №8. - P. 4 - 12.

354 241. Belobrova M.V.,Boyev A.G., Ivanov V.K., Kalmykov I.A., Matvyeyev O.Ya.,
Razskazovsky V.B., Tsymbal V.N. The results of the multifrequency radar monitoring on the roughness inhomogeneities of the sea surface // Kosmichna nauka I tekhnologiya. – 2002. –Vol.8, №2/3. –P.275-278 (in Russian).
242. Belobrova M.V.,Boyev A.G., Ivanov V.K., Matvyeyev O.Ya., Razskazovsky V.B., Tsymbal V.N. Experimental Multifrequency Investigations into the Sea Surface Roughness Inhomogeneities through the Use of the "MARS" Radar System // Proc. 4th European Conf. on Syntheric Aperture Radar, EUSAR 2002: 4-6 June 2002. - Cologne (Germany). -VDE-VERLAG GMBH *Berlin*Offenbach. - P. 733-736.
243. Finkelchtein M.I. Fundamental radiolocation. Moscow: Publishing house "Sovetskoye radio", 1973. – 496p. (in Russian).
244. Yermakov S.А., Pelinovsky Ye.N., Talipova Т.G. On the SAS films influence on the variations of the wind roughness spectrum under internal waves impact // Izvestiya АS of the USSR. Phyzika atmosphery i okeana. –1980.–Vol.16, №10.–P.1068-1076 (in Russian).
245. Boyev А.G., Matvyeyev A.Ya. The amount estimation of the oil pollutants in the oil-producing area “Oil Stones" in the Caspian Sea using multifrequency radar data//Radiophyzika i Radioastronomiya. -2005. -Vol.10, №2.-P.178- 188 (in Russian).
246. Burkov V.А. Spatial-time variability of the Gulf Stream energy-active zone// Spatial variability of the structure and heat transfer with atmosphere in the Gulf Streamи. Moscow: Publishing house "Nauka". - 1987. -P. 3-45 (in Russian).
247. Grodsky S.А., Kudryavtsev V.N., Ivanov А.Yu. Investigations of the Gulf Stream frontal zone by using SAR EOS "ALMAZ-1" and ship contact measurements// Issledovaniye Zemli iz Kosmosa. -1996. -№6. -P.59-70 (in Russian).
248. Richardson P.L. Gulf Stream trajectories measured with free-drifting buoys // J. Phys. Oceanogr. -1981. - Vol11, N7. - P. 999-1010.
249. Inanov А.Yu., Litovchenko К.Ts. Oceanological results of the EOS "ALMAZ-1" flight // Zarubezhnaya padioelectronika. Uspehy sovremennoy radioelectroniki. - 1999. - №2. - P. 18-28 (in Russian).
250. Hayes R.M. Detection of the Gulf Stream//Spaceborne Synthetic Aperture Radar for Oceanography. The Johns Hopkins Oceanographic Studies. - 1981. -N7. -P. 146-160.
251. Belobrova M.V., Boyev A.G., Ivanov V.K., Kalmykov I.A., Matvyeyev O.Ya., Razskazovsky V.B., Tsymbal V.N. Experimental studies of the spatial irregularities of the radio-wave scattering in the Gulf Stream zone // Izvestiya vuzov. Radiophysika. – 2001.-Т.XLIV, №12. – P.1031 – 1038 (in Russian).
252. Belobrova M.V., Ivanov V.K., Kalmylov A.I., Matveev A.Ya., Razskazovsky, and Tsymbal V.N. Experimental Studies of the Spatial Irregularities of Radio-Wave Scattering in the Gulf Stream Zone // Radiophysics and Quantum Electronics. – 2001. – Vol.44, No.12. –P. 949-955.
253. Karaev V.Yu., Balandina G.N., Angelov М.К. On the problem of a sea wave spectrum as applied to the remote sensing of a sea surface: Preprint/ Russian AS. Applied Physics Institute; №470. - Nizhni Novgorod: 1998. - 30 p. (in Russian).
254. Monin А.S., Ozmidov R.V. Ocean turbulence. Leningrad: Publishing house "Hydrometizdat", 1981. -320 p. (in Russian).
255. Aleksandrov А.P., Vayndruk E.S. Parameter measurements of the aerated sea layer as remote investigation method to the near surface vertical turbulence // Investigations of the geophysical fields variations in the ocean. Мoscow.: Publishing house "Nauka". - 1974. -P. 122-128 (in Russian).
256. Otnes R., Enoxon L. Application study of the temporal series. Basic methods: Translation from English. Мoscow.: Publishing house "Mir", 1982. -482 p. (in Russian).

355 257. Dulov А.V., Zapevalov А.S., Bolshakov А.N., Smolov V.Ye. Appearance of water
dynamics in the littoral zone on the field of the breaking-down wind waves// Marine Hydrophysical Journal.-1999.-№4.-P.3-17 (in Russian).
258. Shulgin А.M. Agrometeorology and agroclimatology. Leningrad: Publishing house "Hydrometizdat", 1978. – 200p. (in Russian).
259. Pichugin А.P., Zhuravel N.Ye, Bychkov D.М. Impact of the agrometearological conditions to the characteristics of the space images of the agricultural regions in the winter period // Issledovaniye Zemli iz Kosmosa, -1988. -№4. -P.58-65 (in Russian).
260. Redkin B.А., Klochkov V.V., Khohlachev V.V., Babushkin А.G. Theoretical and experimental investigations of the soil complex permittivity in the VHF range // Radiotehnika i elektronika, -1975. -Vol. 20, №1. -P.164-166 (in Russian).
261. Popov А.I., Tushinsky G.N. Perfrostology and glaciology. Мoscow: Publishing house "Higher School", 1973.- 273p. (in Russian).

356
THE APPENDIX 1
DATA COMPLEXATION OF AEROSPACE RADAR SENSING AND CONTACT MEASURMENTS IN THE AREAS OF THE NATURAL TESTING AREAS
During the execution of works on natural testing areas creation and dataware for
aerospace ERS several surface patches specific for a forest-steppe region in territory of the Kharkov region, having a wide variety of soil and vegetative coverages and relieves was used.
The first aerospace ERS testing area was located in the West of the Kharkov region within the limits of Krasnodarsk, Novovodalazhsk and Kegichevsk regions and lied in a triangle of inhabited localities - Staroverovka - Medvedovka - Vlasovka.
According to physiographic zoning, the testing area territory belongs to the North-steppe province of a steppe zone of the left bank of Dnepr river, and geologically the range territory is confined to salt-dome structure of Medvedovsk. The surface stratums of the testing area are anisomerous sands of Paleogene and Neogene. Quarternary stratums are loess-like loams and loesses.
The investigated agricultural lands of the testing area are mainly located on the right bank of Berestovaja river within the plateau of Priorelsk. The plateau surface is slightly undulating and is greatly incised by ravine and gully girdion. The region climate is moderate-continental. According to the long-term observations at a weather station of the Krasnograd city the average annual temperature is 6,9ºС, and the average annual rainfall amount is equal to 536 mm (tab. 1).
Table 1. The average monthly air temperatures and precipitations quantity (according to long-term data of the weather station of the Krasnograd city)
Months Parameters
1 2 3 4 5 6 7 8 9 10 11 12
Тº С -7.2 -7.0 -1.0 7.6 5.0 18.2 20.8 19.5 14.4 11 1.0 -4.9 Rainfall, mm 29 23 36 35 50 71 64 57 35 43 51 52
Despite the wide variety of the wind directions, it is possible to note the
predominance of east, southeast and western winds in winter; east and southeast ones in spring; western and northwest ones in summer; eastern and southwest ones in autumn. The most frequent winds above the Kharkov region have speed from 1 up to 6 m/s. The highest wind speeds are in January and February (up to 25 m/s), the lowest ones are in July and in August (1-2 m/s).
The main water-way of the testing area is Berestovaja river. In a plot between villages Medvedovka - Vlasovka the Berestovaja river meanders in a floodplain with width of 1-1,5 km. The river-bed width varies from 5 up to 15 meters at average depth from 0,5 up to 1 meter. In summer months the river shoals greatly, the floodplain is used for planting vegetable crops. The floodplain wet plots are confined to its edge - to the border of a floodplain and first over-floodplain sand and pine forest terrace. The surface flow in testing area territory is regulated. There are ponds-water basins in many gully.
The soil cover of the region has the thick middle-humic black earth and the

357
regraded podzolized soils, typical for steppe northern subzone. The natural vegetation remained fragmentary on gullies declivity. It mainly
consists of by steppe graminoids and meadow sorts of plants. There are the tracts of deciduous forests in the ravine and gully sources. In plots of sand and pine forest terraces development, there are pine forests. The poium and limnodium occupy the sizeable plots of the gullies and floodplain buttoms of the Berestovaja river.
A wide variety of phytocenosis against a background of agricultural lands provides the high patchiness of the testing area radar images that is the favorable factor at determination of the main dynamics regularity of radar echo characteristics.
The used data bank of the initial information about the dynamics of the range natural-technical system embraces the time since April, 1988 till September, 1989. During the researches period with the periodicity of 5-10 days there was researched the condition of 9 fields, which were in advance chosen for the experiment. All the fields are on the right high bank of the Berestovaja river. They occupy the territory with the area about 1000 hectares. The configuration of the fields and the dynamics of the agricultural use are in Fig. 1 and in table 2.
Fig. 1. The agricultural fields scheme of the testing area No.1. The numbers of the fields limited by full lines marked out with digits, the forest belts marked out with dashed lines

358
Table 2 The structure of agricultural use of the territory of the testing area No.1
The disposition features of agricultures Field No.
Area, hectares
1988 1989 1 2 3 4 5 5а 6 7 7а
150 75 160 100 160 90 110 130 60
The winter wheat Fallow - winter wheat sowings The winter wheat The winter wheat Maize for grain Barley Maize for silage Forage permanent Forage permanent
The sugar beet The winter wheat The sugar beet The sugar beet Sunflower Sunflower Barley The winter wheat Forage permanent
Field 1. It is located in the southeast of the testing area. It is elongated from the
North to the South. In the central part of the field there is a wide flow shallow gully lowered in the direction of forest-covered gully of Medvedosk.
Field 2. It is occupied the southern part of the testing area. It has a complex configuration and it is limited from three sides by forest belts. In the southern part of the field there is the small mound towering above a surface up to 2 meters. The total slope of the field at 1º-2º is directed to the southwest.
Field 3. It is located in the center of the testing area and it is elongated from the West to the East. It is limited by forest belts from the South and the West. The field has a slope up to 3º in the northwestern direction. The wide flow shallow gully begins at the center of the field and lasts to the northwest.
Field 4. The total slope of the field is directed to the southwest, the tilt does not exceed 3º.
Field 5,5а. They have a slightly undulating surface. In the center of the field there is a watershed of the ravine and gully system. The tilts are widely varied from 2-3º in the center till 4-7º in periphery.
Field 6. In the south part there is the flow shallow gully, which turn into a field 1 shallow gully. The slope of the area from the North to the South is up to 5º.
Field 7,7а. It is characterized by slightly-defined tilt in the western direction. The second testing area was located in the area of state farm "Lesnaja Stenka", lied
on the right bank of the Krasnooskolsk water basin. This region is a forest-steppe geosystem with intensive agricultural use of lands. Its dynamics is characterized by relatively fast state transition caused both hydrometeorological factors and growth and evolution of the vegetative coverage. The territory of the range is limited from the north by the river-bed оf the Sinicha river, from the south is by ravine elongated from the northwest and reached the bank of the Krasnooskolsk water basin.
The water basin bank has overgrown with a deciduous forest. The single forest tracts are in territory of the range. The relatively high degree of afforestation of the water basin bank promotes the guarding of an ecosystem from degradation because of an anthropogenic load. The territory of the testing area is characterized by a undulating relief divided by gullies into a number of intergully watershed. The watershed tops are relatively narrow, slopes are gentle. The dividing of the tract, the presence of slopes of a various tilts, the deep basis of the erosion have caused here the intensive evolution of erosion processes.
The most widespread soil-forming rock in the testing area territory are loessial rocks, which lie on the leveled plots and slopes of local watershed, the main texture of soil

359
is heavy-loamy. The relatively fertile soils, the main of which is the black earth, were formed on such rocks.
For detail analysis by means of the contact methods the field between two pastures in the north and in the south, which overgrown with shrubs, there is a rather shallow gully in the West, the earth road is in the East was used. The field is researched during the summer period of 1990. The structure of the sowings and soil map are in Fig.2.
The third testing area was located in the central part of the Kharkov region. Its area consists 3000 km2. Territorially the range is in administrative boundaries of Kharkov, Chuguev, Zmiev and Balakleja regions. The test plot is in territory of collective farm "Rossia" of the Chuguev region. The relief is typical, well expressed, erosive, narrow undulating. The tract of land is divided by the system of the developed gullies and by the valley of the Tetlega river into several narrow watersheds. The surface of the watershed plateaus is leveled. The soil composition includes the black earths: typical, podzolized. The gullies width is 150-300 m, depth is 10-20m, the bottom of the gullies is 30-80 m. In the northeast, there is a part of slightly undulating pine forest terrace presented by podzolized clayey and sod-slightly podzolized soils. The range scheme with the test plot is in Fig. 3.
The winter wheat The overgrown fallow The winter wheat The fallow Lucerne
892m
820m
5L 5L 2L 2L 4L 2L 4L 5B 5L 5 6 5P
Explanation: 2- the thin regarded black earths; 4- the thin podzolized black earths; 5,6- the typical thin black earths; L-arable, В- brown-arable loess-like loams; Р-sands and и loamy sands. \ - slightly erose; \\ - middle erose; \\\ - heavy erose; ||| - leached; ______ - water smoothed
Fig. 2. The remote sensing testing area No.2

360
1-wood, 2 - inhabited locality, 3 - road, 4 - arable land, 5 - field after the sugar beet harvest, 6 - test plot territory
Fig. 3. The remote sensing testing area No.3
The testing area No.4 was located in fields of state farm "Аseevskij" and collective
farm named after Frunze of the Balakleja region of the Kharkov region (Fig. 4). In crop rotations of these farmings predominate maize, barley, sunflower, beet, permanent forage grasses. Soils are typical thick black earth and the thickness of a humus horizon reaches 50-80 cm.

361
The described ranges were long-term matter of the research during 1983-1994. The detailed monitoring of soils and covers there was realized by collaborators efforts of IRE NAS of Ukraine, KhSU, the Institute of Edaphology and Agrochemistry in these ranges. During the series of flights the parallel operations were kept in ranges related to other regions according to the research program of oil-and-gas content, the researches of forest tracts, river basins etc.
1 – the numbers of the fields, 2 - inhabited locality
Fig. 4. The fields general lay-out on testing area No.4
The survey realization of testing areas by means of aircraft complexes of radiophysical remote sensing instrumentation.
Operation with aircraft complexes of radiophysical instrumentation concerning the testing areas was kept in two directions.
The first one included the single-minded researches in which the flying mission of the aircraft-laboratory has been completely concerned with the test subject. The traffic pattern represented a series of straight-line traces along the test ranges, each of which had displacement in an orthogonal direction to the center of the ranges to obtain the set of

362
angular curves of scattering from the surface. The realization of the box-pattern flights allowed to evaluate the azimuthal characteristics of scattering from the subject. The flights were realized during the spring-autumn period by series in 2-3 series per month, including 3-4 flights with duration up to 4 hours.
Days and time of day were chosen as far as possible with identical atmospheric factors. Such researches have allowed to create the databank of the seasonal surface alterations. The research of the snow cover was taken occasionally, mainly in the second direction of researches.
The second direction was based on possibility of the databank updating of the radar scatterings during the nonspecialized operations of aircraft laboratory, and while in flight across the area of the ranges and coming to landing to the station. In such situation the single survey of investigated ranges with their disposition in the sensor swath center was made. In these cases the land team collected the information with possible delays from several hours up to one day.
The analog and digital recording of the output signals of the radiophysical instrumentation during the operation traverses was made. At turns there was made the complete calibration in manual, which is used for autocalibration adjustment.
All the data concerning the instrumentation mode and alterations in movement trace of bearer were registered in the log-book and were used at land IBM PC processing to adjust the radiometric and geometrical distortions. The contact measurements realization in testing areas
To collect the initial databank, which is necessary for a reliable decoding of the radar surveys there were taken the contact measurements of the surface parameters, influencing the scattered signal, in etalon plots (ranges), synchronous with remote radiophysical investigations.
Due to the analysis of the theoretical prerequisites, it is possible to make the conclusion, that for problem solving of earth monitoring by means of contact methods it is necessary to study the following parameters: 1. The geometrical surface profile (cusp height and slopes of a microrelief); 2. The top-soil moisture; 3. Soil moisture in different depths; 4. The moisture of the air surface layer; 5. The vegetative coverage altitude, architectonics and projective cover; 6. The vegetative coverage biomass and moisture both in general and in layers; 7. The snow depth and thickness, and free water quantity in the snow cover.
As the listed parameters in many respects are determined by weather, there was taken constant microclimatic observation in remote sensing range. The meteorological watch station equipment
The meteorological watch station was mounted in the fallow field on distance not less than 10 m from a field edge on distance not less than 3 altitudes of trees or any other subjects, shading the surface.
During the operation, the following devices were used: self-recording daily thermograph, hygrograph and dewgraph, the Savinov soil thermometers set, not less than 3 "express" thermometers (fast-response mercury thermometers), Assman psychrometer, anemometer, precipitation gage.
The thermograph and the hygrograph are used to control the tendency of alternation and to define the points of temperature inflexion and surface air moisture. For soil temperature measurement at different depths are used Savinov thermometers, which are put at a depths of 5, 10, 15 and 20 cm.

363
There was thoroughly planed the site with a size of 1 to 1 m for soil surface temperature measurement. There were put three "express" thermometers on distance of 15-20 cm horizontally from each other, in parallel with each other in the middle of the site. They were put so, that 2/3 of the cylinders with mercury were underground and 1/3 remained outside.
Track measurements
The track measurements were routinely conducted with the periodicity of 1 or 2 weeks to determinate the seasonal relation of the investigated parameters, and were obligatory conducted during the flights.
The group of observers consistently passed round all the range fields. In every field there was described the vegetation coverage condition (in uncovered fields was described a soil condition), by means of the Assman psychrometer there was taken the temperature and air moisture at a surface, at the altitude of the vegetation coverage and at the altitude of 2 m. The temperature on the surface and at the depth of 5cm. was taken by means of the "express" thermometers. It were taken the vegetation samples for biomass and moisture and the soil samples for moisture. By means of the anemometer it was determined the direction and velocity of the wind and the atmosphere condition was visually described.
In single days for analysis of the time course of the listed above parameters in each field there was an observer, who made the measurements with an interval of 1-2 hours.
For the fields, which have been not covered by vegetation, the surface roughness is measured by means of the profilometer. The description of the vegetation coverage
Simultaneously with the definition of the vegetation moisture there was described the condition of the vegetation coverage in each field.
The projective cover of the soil with the vegetation in a nadir, and at the angles of 450 and 60º-70º was approximately determined, the pictures were made. According to them at laboratory environment there was specified the projective cover (what percent of the area is covered with vegetation).
It was counted the quantity of the individuals per 1 m2 of the area. For grain crops, this count is more convenient to make at laboratory environment according to the quantity of stalks in samples for moisture of underlayer vegetation.
There were chosen some of typical plots in the corn and the sugar beet fields. With the band it was marked a square with size of 3m to 3m, inside of which the quantity of the plants was counted in rows.
It was measured the average altitude of vegetation coverage. It was described the architectonics of an "average" plant: stalk height and diameter; size and quantity of the leaves; fastening altitudes, the slopes and azimuthal direction of the leaves, fruit size and orientation. It is indicated the direction and amplitude of oscillation of plants, if there was the wind. The measurement of the vegetation moisture
The vegetation moisture was determined during all the period of vegetation and maturation with a sampling interval of 1-2 weeks.
The field plots, where the vegetation moisture is determined, were chosen in the same way as for the definition of the soil moisture.
The similar equipment is used for measurement of the vegetation moisture, as well as in the previous paragraph, and were applied the square frame of the thin rods with the size of 50х50 cm and a ruler, with the length not less than 1m with an interval of 1 cm
The sampling procedure is different for thick growing crops, not large plants (grain

364
crops, forage grasses) and for the large plants, which are in some distance from each other (corn, a sugar beet).
When the thick growing crops moisture was define, the frame put arbitrary on the ground. All the plants inside the frame were cut off at the roots and put into a linen bag with known weight. The bag was packed closely into a plastic sachet.
If the altitude of the vegetation coverage is more than 20cm, the moisture layer-by-layer was determined. For this purpose the cord is pulled at the necessary altitude, and the vegetation was cut off according to its level. Each layer was put into its bag.
If the grain crops altitude is more than 50cm, the top of the plants, being in the frame, were bounded, the plants were cut off at the roots and stacked. The received sheaf was cut up from a root in 10 cm, these parts were numbered and put into the individual bag.
For thinly growing plants, it is counted the quantity of the individuals per 1m2. Then, at the early stages of vegetation several "average" plants are put into the bag and it is indicated their quantity, then by means of the conversion it is determined the moisture of one plant and moisture in this area.
When the vegetation coverage reaches altitude of 50-60cm, its moisture is also determined layer-by-layer, but working not with a sheaf, but with a single plant, considering, that vegetation moisture is more stable than soil moisture [1] (samples in a plot are taken with single reiteration).
The moisture is determined by a thermogravimetric method. Sample is extracted from a plastic sachet and is weighed together with the linen bag Рвм. Then the vegetation is dried in desiccators at the temperature of 90-950С together with little bag up to constant weight (Рсм).
The moisture is determined by formula:
Wр=(Рвм-Рсм)./(Рвм-Рм) (1)
The biomass and moisture of crops were regularly estimated during all the researches period. The alteration examples of dry and wet biomass (the integral index including the biomass of plants, and their moisture) are presented in Fig. 5 (wheat) and in Fig. 6 (sunflower and the sugar beet).
20.04 25.04 4.05 12.05 20.05 1.06 8.06 21.06 28.06 12.07
5 4 3 2 1 Th
e bi
omas
s, kg
/m2
Field 7
Field 7
Field 2
Field 2
Fig. 5. The dynamics of the wheat biomass in 1989 (testing area No. 1)

365
Concerning the wheat, it is possible to speak about two periods during the vegetation - the period of building up of wet biomass and the period of its degradation. For the range fields the second period has began at the end of June when dry biomass was still building up, and moisture was gradually reduced in process when the wheat achieved the stage of wax ripeness. Dry biomass grows in regular intervals till the ear will appear, which leads to the sudden change in biomass (Fig. 5 - two upper curves match to wet biomass, lower are dry one).
The highest building up rates of sunflower and of the sugar beet suit the second half of July (Fig. 6).
12.05 20.05 1.06 8.06 21.06 12.07 8.08
T
he b
iom
ass k
g/m
2
1.4 1.0 0.6 0.2 0
sunflower
The sugar beet
Fig. 6. The dynamics of the sunflower and the sugar beet biomass in 1989 (tasting area No.1) The description of the surface roughness and texture
The soil sieve test (the content (in mass) of elements of various magnitudes in it) is one of the important parameters determining physical properties of the soil. The grading of soil alteration caused alteration of their properties: permeability, moisture, specific density, inductivity, etc. To determine the grading of substances it was made an analysis, which consists in soil sample dismemberment in groups with magnitude like elements-fractions [2]. It was made the sieve analysis with application of a standard set of sieves with different cell sizes during the works. The analysis results were expressed in percentage.
In the theoretical models producing the satisfactory coincidence to the experiment. As the characteristics of the surface roughness there are normally used the root-mean-square altitude of irregularities, autocorrelation functions, correlation distance [3,4] .
The mean-square value of a random process produces elementary notion about intensity of process. The density of distribution characterizes the process values distribution in the fixed points. The spectral density produces the information in frequency domain. The autocorrelation function of the random process characterizes the general dependence of the

366
process values in some point on values in another point. The initial data about the geometrical profile of the studied surfaces are received
by means of specially designed profilometer, allowing to describe the altitude alterations of surface irregularities to within 5 mm with step angle of 10 mm. As the measurement result of the agricultural fields processing in different ways were received the dependences of irregularities altitude on space- F (l) with implementation length of 3 m for which the autocorrelation functions and spectra were calculated according to the standard programs [5]. It is necessary to note, that the measured perpendicularly to visually observable tillage furrows profilogramms were mathematically treated.
Cultural cultivated areas, as well as the natural surfaces, are seldom smooth ones and, as a rule, are characterized by a wide variety of irregularities. The soil machining system leads to consecutive occurrence in the same areas the fields, which are essentially differed in roughness degree: of cultivated, harrowed and sown cultivated. The table 3 below brought the maximum swing (Fmax) and root-mean-square altitudes (σh) of irregularities for the fields processed in different ways. Rows A and B contain the data for surfaces, row C - the average data of 5-10 fields.
Table 3.
Some statistical characteristics of the investigated surfaces Cultivated
fields Cultivated water smoothed fields
Harrowed fields Sown fields
Fmax σh Fmax σh Fmax σh Fmax σh А 19.5 4.3 14.5 2.5 9.4 2.1 4.5 1.0 B 18.5 4.5 18.0 4.5 15.0 2.4 9.0 2.2 C 18.0 4.3 16.3 4.1 10.4 2.2 6.4 1.7
The density of a random process distribution determines the probability of that the
value of the process in an any point will be contained in the specific interval. The diagrams of the density of distribution of the harrowed field irregularities
across the cultivated one and of the sown fields are bimodal and the most accurate bimodality is registered for a field, sown with sunflower (profile is perpendicularly to furrows (Fig.7а).
10 12 1 4 16 18 20 X , сm
Р (x) 0. 3 0 P (x ) 0. 3 0
10 1 2 14 16 1 8 2 0 X ,сm
b
c
ad
Fig. 7. The diagrams of a density distribution of the harrowed field irregularities across the cultivated one (c), of the sown with sunflower one (a, d), of the sown with potato one (b)

367
The principal cause of the bimodality is that the values of the irregularity altitudes tend towards two scales. The scale with a large mode is apparently caused by quasi-regular furrows, and the scale with a smaller mode is shallow soil clods or harrowing furrows. Their sizes, in turn, depend on many causes - on soil moisture, the crop rotation, etc.
The two dimensions is not so distinctly in other described fields. For the potato field it is most weakly (Fig. 7b). The diagram of the density of distribution for the field, which is sown with sunflower, (in parallel with furrows), looks like a rectangle with weak peak at 21cm.
In most cases the two dimensions are the index of that the initial profilograms are the sum of the harmonic process and the random noise.
It's failed to distinguish the typical autocorrelation function for the recently fallow fields. It is bound up with that the caused by plowing periodicity is strongly distorted due to lumpyty. The appeared during the moldboard plowing large clods and lumps have an accidental orientation. Their sizes depend on type of soil moisture that leads to a large variety of surfaces. For each single field the autocorrelogram could be approximate by function:
xexR xβπα 2cos)( = , (2)
though it is impossible to determine what is caused the value of the α and β ratios in general.
For the water smoothed fields (i.e. field, which irregularities are smoothed due to melt and rain waters) the autocorrelation function, having the same general view, as well as for recently fallow fields, become more smooth, in some cases having the well-marked frequency caused by the furrows of plowing.
The harrowed surfaces are easy to typify. The autocorrelation functions of the harrowed fields can be shown as:
,2cos2cos)1()(00
xl
AxL
eAxR x π+
π−= α− (3)
where: the ratio of A is determined by a depth proportion of plowing harrowing, L0 is the distance between plowing furrows, l0 is the distance between harrowing furrows.
The roughness structure of the sown fields, which have not yet sprouted or undeveloped vegetation is determined by sowing along or across plowing furrows.
For such kind of fields the caused by plowing frequency is leveled off by the further machining and the accidental irregularities exert influence on the roughness structure. The sown along plowing furrows fields have the two dimensions, as a rule, the well-marked.
The use of spectral analysis during the processing of the space rows has allowed to receive more detail information about the frequency character of agricultural surfaces. The form of the spectra, the peak location in a spectrum and their values for these surfaces are specific enough.
The maximal peak of spectra, as a rule, corresponds to the frequency connected with plowing. The irregularities with rather large amplitude are formed by plowing. The further soil machining does not allow to level off completely these irregularities, therefore the surfaces of the spectra of the harrowed and sown cultivated fields contain the peaks corresponded to the plowing frequency. Depending on a plow structure, the distances between plowing furrows vary from 0.45 up to 0.90 m.
The investigated spectra have allowed to define three the most often periodicities for surfaces of agricultural fields. The first one, connected with plowing, as a rule, has the most thick peaks in low-frequency area of the spectrum. The distances between plowing furrows, according to the received data can be 45, 70 and 90 cm depending on type of

368
cultivating devices. The peaks describing frequency of cultivation are not less distinctly expressed. The use during the tilth of the disk cultivators with fixed distance between disks of 0.25 m has led to appearing of well expressed peak, matching this period. The peaks corresponding to the harrowing furrows periods, as a rule, haven't such stability, it is connected with a variation of distances between rippers of the harrow. The measurement of the soil moisture
For soil moisture measurement the following devices and gadgets are used: 1. The desiccator, which maintain the temperature of 100-105ºС; 2. The scales providing the weighing accuracy ~0,01g; 3. The thin-walled metal frame with a size of 10х10 cm2 and with an altitude of 3-
4cm greater, than investigated soil depth. There are the lines registering the depth in 1, 2, 3... cm in the inner side of the frame;
4. Metal weighing bottles with a size not less than 100 cm2, with hermetically closed cover;
Depending on the topography and the sizes of the field there are chosen from 3 to 10 plots in the field. In case of large quantity of observation, the plots are chosen accidentally, diagonally with the distance of 50-100 m from each other for example. If there is paucity of observation, the most typical plots are chosen for this field.
The metal frame is pressed into the soil for the necessary depth, then the soil layers with the depth of 1 cm are removed by spade. Each layer put into the individual weighing bottle with known weight (Рσ).
As soon as possible, the weighing bottles are weighed after the sampling (Рвл). At the laboratory the soil is dried in the open weighing bottles up to constant weight at the temperature of 100-105ºС (Рс).
Weight soil moisture is determined by formula [1] W=(Pвл-Рс)/(Рс-Рσ) (4)
Because of a large patchiness of the soil moisture of the surface, there are taken three samples at the distance of 50-100 cm from each other in each plot, and then it is determined the midvalue of three measurements concerning each layer. If the values of moisture in one of the samples strongly differ from two others, the moisture in this point is considered as anomalous (or an experiment error) and do not consider during the further calculations.
The total moisture according to the depth is determined at the track measurements. Here instead of the frame is used the cylinder, which is pressed into the soil at the necessary depth, the soil is cut below by spade and the whole volume is put into weighing bottles. If the soil has a lot of clods, the clods moisture determined separately and it's pointed their average size and quantity per 1 m2.
If the soil is cultivated, the moisture is determined at the slope top and at the hollow ridge, because in some cases the moisture dependence of the slope top and of the hollow ridge can be up to 10%.
The experimental results of the earth remote sensing by multifrequency radiophysical methods The soil remote sensing results
This section analyses the possibilities to obtain the information about the soils condition according to the multifrequency radar sensing data of the testing areas by means of the connections between the soil backscattered signal and its natural morphological characteristics. There was considered the complexity and physical inhomogeneity of both the system "ground-soil fertility" and of each component of this system separately [6,7] .

369
The radar survey has been conducted synchronously with the field work, which consist in the sample drawing of the soil and of the vegetation coverage with further office studies in range 3. There were the parallel measurements and the description of vegetation coverage condition and extents of fields machining.
There are radar images (RI) of the testing area over the X, L, VHF radio waves ranges in Fig. 8. The investigated fields, dividing by the forest belts, ravines, forest tracts, settlements are clearly visible in them. The tone intensity alteration of the image in the fields is determined by their condition at the survey moment, causing the variations of the scattered radio signal.
It has been chosen the data handling by pair correlation method as the first way of RI interpretation. In the test plot, it has been taken 12 check sites, which characterized the ground condition at the survey moment. The following parameters were evaluated: soil density (up to depth of 50 cm), the content of physical loam (up to depth of 50 cm), soil moisture in % from mass and volume (up to depth of 50 cm).
X L VHF-ranges
Fig. 8. The radar images of testing area over the: a - centimeter (X), b - decimeter (L), and
c - meter ranges of radio waves (VHF)

370
It were used the geomorphological sites characteristics (slopes, altitudes expositions and so forth), and also such parameters as capacity of a nanorelief and the maximal size of the lumps in the fields.
There were chosen "windows" considering the location of the sampling points in the area in RI. Each "window" contained 20 pixels. According to the general procedure, these pixels have been grouped by 5 and averaged. Thus, during the processing each site was characterized by 4 elements of the radar image (ERI). The processing results are in table 4.
Table 4. The correlation coefficient values between RI survey data and soil characteristics
Parameter SLR-3 SAR-23 SAR-180 Parameter SLR -3
SAR-23
SAR-180
G(0-20 сm) 0.05 0.15 0.31 Wv(30-40 сm)
0.17 0.03 0.08
G(20-40 сm)
0.01 0.09 0.27 ρ(0-10сm) 0.63 0.61 0.56
G(40-60 сm)
0.01 0.11 0.28 ρ(10-20сm) 0.58 0.53 0.52
Wm(0-10 сm)
0.27 0.06 0.28 ρ(20-30сm) 0.31 0.34 0.53
Wm(10-20 сm)
0.53 0.31 0.33 ρ(30-40сm) 0.53 0.20 0.21
Wm(20-30 сm)
0.41 0.42 0.43 Vn 0.25 0.34 0.43
Wm(30-40 сm)
0.53 0.44 0.45 R 0.31 0.39 0.45
Wv(0-10 сm)
0.28 0.58 0.41 E 0.10 0.09 0.06
Wv(10-20 сm)
0.16 0.26 0.32 N 0.37 0.48 0.27
Wv(20-30 сm)
0.02 0.12 0.23
where- G-the physical loam content, Wm - soil moisture in % from mass, Vn - nanorelief capacity, Wv - soil moisture in % from a volume, R- clod size, r - soil density, E - exposition, N-slope
The greatest correlation of the scattered signal with consistency of the soil is observed in depths of 0-10 and 10-20 cm in centimeter and decimeter ranges. In a meter range the correlation coefficient is 0,53-0,56 for layers of 0-10, 10-20, 20-30 cm.
Thus, from all of the soil characteristics the radar data are most connected with consistency of the soil in the layer of 0-10 cm, and this parameter reduces its effect on reflectivity in process of increase of the radar wavelength.
The greatest connection between the content of the volume moisture and reflectivity in the layer of 0-10 cm for decimeter (0.58) and meter (0.41) ranges. In the

371
deeper layers such relation is not observed. The RI processing has allowed to evaluate the connection with moisture content in
a soil (in weight percents). This connection is most expressed in the centimeter range in depths of 10-20 and 30-40 cm (r=0.53).
The brought in the table data analysis shows, that the characteristics of the relief, and of the surface roughness are poorly correlated with radar sensing data. The weak relation is caused by that there were no comprehensive measurements of the surface roughness in scales, compared with radio wave length during this experiment.
To account the parameter complex of the system "ground-agricultural background" the model was used, which basis is the equation of a multidimensional linear step-by-step regression. The equation of relation RI data concerning each range with the following variables was made: x1- the volume moisture of the agricultural background; x2-the vegetation moisture; x3-the projective cover area; x4-the physical clay content in depth of 0-20 cm; x5-the consistency of the soil in depth of 0-10 cm. During the processing the following regression equations have been received:
Yсm= -66,93+0,49 x1-0,65 x2+5,89x4-147,89 x5 (5)
(R=0,89; R2=0,79)
Ydm=145,7-1,03 x2+1,03 x3-96,42 x5+0,75 x1 (6)
(R=0,89; R2=0,79)
Ym=35,7-0,27 x2-57,2 x5+1,54 x4+0,2 x1, (7)
(R=0,65; R2=0,42)
where Ycm, Ydm, Ym - normalized intensity of the radar in centimeter, decimeter and meter ranges of radio waves accordingly, R - a multiple correlation coefficient, R2 - coefficient of determination.
The second direction of radar images decoding used the method of the hierarchical cluster analysis. The calculations were made according to the Ward's algorithm in Euclidean space. As the vectors presenting multidimensional space, were the radar surveys data in various ranges of radio waves.
The processing results are presented in on dendrograms Fig.9-16. The dendrograms are the cluster analysis results as graphical display of the sample division in classes. Thus on a horizontal axis the object numbers through equal intervals, and on standing one - the value of the similarity degree between these objects were lay. As the similarity degree the coefficient of merging, showing distance between classes in the set multidimensional space is used. The quantity separation of object classes was made according to Throndake [8]. For this purpose, the graph of Fig. 10 for dendrogram of Fig. 9 was made. On the standing axis the values of coefficient of merging, and on horizontal one - the clusters quantity were lay. The minimal number of the separated clusters is equal to number of objects, which are investigated. The points, which have been lay in the diagram, show, at which coefficient of merging the difference between objects becomes negligible and there is their join into 1-st class.

372 Кm
0
30
60
90
120
150
180
1 1 1 1 1 2 2 2 1 2 1 1 2 2 1 1 1 2 1 1 1 2 1 1 2 1 1 1 1 1 2 2 1 2 2 2 1 2 1 2 2 2 1 2 2 2 2 2 2 2 2 1 2 1 2 2 2 1 1 1
Fig.9. Distribution of soils according to the granulometric composition according to the radar surveys in centimeter (λ=3 cm), decimeter (λ=23 cm) wave bands
Explanation:1- "light" granulometric composition, 2 "heavy" granulometric composition, ------ - division line of denrograms into
clusters (according to Throndake)
Кm 150 120 90 60 30 10 9 8 7 6 5 4 3 2 1 0
point of inflexion
Fig. 10. The quantity separation diagram of the single clusters for dendrogram in Fig. 9

373
0
40
80
120
160
200
240
2 2 2 2 1 2 1 2 2 1 2 2 2 2 2 2 1 2 1 2 1 1 2 2 1 1 2 1 1 1 1 1 1 1 2 1 2 1 1 2 1 2 1 2 1 2 1 1 2 2 2 1 1 1 1 2 2 2 1 1
Fig.11. Distribution of soils according to the granulometric composition according to the radar surveys in centimeter (λ=3 cm) wave band
Explanation:1- "light" granulometric composition, 2 "heavy" granulometric composition, ------ - division line of denrograms into
clusters (according to Throndake)
Кm
0
20
40
60
80
100
120
2 2 1 1 1 1 1 2 2 1 1 1 1 1 2 1 1 2 1 2 1 2 2 2 1 2 1 2 1 1 1 2 2 2 2 2 1 2 2 2 1 2 1 1 1 2 2 1 2 2 2 1 2 1 2 2 2 1 1 1
Fig. 12. Distribution of soils according to the granulometric composition according to the radar surveys in decimeter (λ=23 cm) wave band
Explanation:1- "light" granulometric composition, 2 "heavy" granulometric composition, ------ - division line of denrograms into
clusters (according to Throndake)

374
Кm
0
20
40
60
80
100
120
1 2 2 2 1 2 2 1 2 2 1 2 1 2 2 2 2 1 2 2 2 1 2 1 1 1 1 1 2 1 1 2 1 2 1 1 1 1 2 1 1 2 1 1 2 2 1 2 1 1 1 2 2 2 2 1 2 1 2 1 Fig. 13. Distribution of soils according to the granulometric composition according to the radar surveys in meter (λ=80 cm) wave band
Explanation:1- "light" granulometric composition, 2 "heavy" granulometric composition, ------ - division line of denrograms into
clusters (according to Throndake) kk
0
30
60
90
120
150
180
2 2 2 2 2 1 1 2 2 2 2 2 1 2 2 1 2 2 1 2 1 2 1 1 1 1 1 1 1 1 2 1 1 1 2 1 1 1 2 1 1 2 2 2 2 2 2 2 1 1 1 1 1 2 2 1 2 1 2 1
Fig. 14. Distribution of soils according to the granulometric composition according to the radar surveys in centimeter (λ=3 cm) and meter (λ=180 cm) wave bands
Explanation:1- "light" granulometric composition, 2 "heavy" granulometric composition, ------ - division line of denrograms into
clusters (according to Throndake)

375 Кm
0
20
40
60
80
100
120
2 2 1 2 2 2 2 1 2 2 2 1 1 2 2 2 1 2 2 2 1 2 1 2 2 1 1 1 2 2 1 1 1 1 1 1 1 2 1 1 1 1 1 2 1 2 1 2 1 2 1 2 1 2 1 1 2 2 2 1 Fig. 15. Distribution of soils according to the granulometric composition according to the radar surveys in decimeter (λ=23 cm) and meter (λ=180 cm) wave bands
Explanation:1- "light" granulometric composition, 2 "heavy" granulometric composition, ------ - division line of denrograms into
clusters (according to Throndake)
Кm
0
40
80
120
160
200
1 1 1 1 1 1 1 1 1 1 2 2 2 1 2 1 1 1 2 2 1 2 2 2 2 2 2 1 1 2 2 2 1 2 2 2 2 1 2 1 1 2 1 2 2 1 1 1 1 2 1 2 2 2 1 2 1 2 2 1
Fig. 16. Distribution of soils according to the granulometric composition according to the radar surveys in centimeter (λ=3 cm), decimeter (λ=23 cm) and meter (λ=180 cm) wave bands
Explanation:1- "light" granulometric composition, 2 "heavy" granulometric composition, ------ - division line of denrograms into clusters (according to Throndake)

376
The purpose of researches was the contribution definition of the parameters of the "ground-agricultural background" condition in formation of the radar signal. To obtain the qualitative results in test range were taken a site, identical under all characteristics, except for investigated. For example, at identification of the vegetation coverage all the investigated plots had similar edaphic characteristics. In this conditions the accuracy of object division according to the investigated feature, has allowed to speak both about sensitivity it of any radio range or their combinations, and about the effect degree of this parameter on the scattered radio signal.
To research the interconnection of radar data with the granulometric composition of soils the fields with "light soils" (sabulous and sandy loam with the content of physical clay of 10-30%) and "heavy" one (light-loamy and middle-loamy with the content of physical clay of 60-85%) have been selected.
In the selected plots with the "light" and "heavy" granulometric composition the machine division in types of agricultural background using the cluster analysis with instruction was made. As training sample were used the above mentioned agricultural background of range and data of the centimeter range. For deliberate exclusion of vegetation effect on the scattered signal the cultivated and harrowed fields were used. As a result the group of six fields having the following soils: black earth podzolized on the loesses having the sand layer in depth of 1-2 meters, and on sands of the "light" granulometric composition, and also black earth, podzolized on loessial rocks and on dense сlay - of the "heavy" granulometric composition has been formed.
The data processing with cluster analysis has shown that at any combination of radio ranges the objects are divided into two clusters, the classification accuracy, however, depends on used combinations. To evaluate the accuracy the criterion of χ2 [8] is used. The more its value, the more authentically classification. For the various combination of radio ranges the values of χ2 are presented in table 5 .
Table 5 The accuracy evaluation of the soil identification according to the granulometric composition using the criterion of χ2
Combinations of radio ranges χ2 centimeter (cm) 5.55 decimeter (dm) 3.59 meter (m) 4.45 cm, dm, m 7.94 dm, m 5.45 cm, m 5.94 cm, dm 8.15
The best identification takes place using the data of centimeter and decimeter
ranges (Fig. 9); in Fig. 11-16 are the dendrograms for the single ranges and their combinations). In this case to the first class belong 22 ERI soils with the "light" granulometric composition and 11 ERI soils with the "heavy" granulometric composition, to the second class, accordingly 8 and 19 ERI. The comparison of the actual (8,15) and the theoretical (6,63) values of χ2 gives the ground to consider the received classification as

377
authentic one at the 90% level of probability. In the third case the technique of classification extensive (complex) objects, based
on the method of analytical approximation of the likelihood relation [9] was used. The use of this method allows to make the classification of objects at non-Gaussian laws of features distribution.
In the offered technique the coefficients of the polynomial minimizing an error of approximation, are determined from the system of the linear equations, which is received by equaling with null of derivatives of an error of approximation according to the coefficients. The known coefficients of equalities are received with the help of evaluation of the sampling instants of instruction. The decision of a fittings of unknown vector of features to one of the classes is made according to the value of the polynomial calculated for this vector of features.
The preliminary visual analysis of radar images in different ranges of radio waves in "window" 21х21 pixels using the three-dimensional graphics package was made.
As the features are chosen 10 pixels, placed horizontally, that has enabled to include the pixels, placed in some distance one from another, instead of one pixel, that has allowed to form the training sample of 42 vectors in 10-dimensional space of features.
At this stage of researches as the final function, the hyper area has been considered. In this case the coefficients of a polynomial а0 - а10 were calculated according to the vectors of the mathematical expectations of covariance matrixes of classes. Final function looks like:
∑1010 i= iixaa)xR( += , (8)
where R ( x ) – the final function, а0,аі - polynomial coefficients, х - a component of a vector of features, і =1...10-components of vector of training sample. To define the statistical persistence of evaluations of the sampling instants was used the
method of the skimming control. There were made the calculations of the upper and lower threshold of mathematical expectations, dispersion and the autocorrelation functions which are looking like:
∑ =/= N
i klikl xNM 11 , (9)
where: M - mathematical expectation, k - class number, і =1... N - number of training sample vector, l=1... 10 - feature number.
∑ =−=
Ni )(/N klklikl MXσ 1
22 1 , (10)
where σkl - dispersion,
∑ σσ ×
×τ N1=i kt
Mkl)-(XkliMkt)-(Xkti1/N=klt
kl, (11)

378
where: τ - autocorrelation function, t=1... 10 - feature number for autocorrelation function calculation. By operation according to this technique only the types of soil and vegetation, without their detailed characteristics were used. Plots with a homogeneous soil (black earth typical middle-humus), but with the different projective coverage (winter-crops, ploughing) have been selected. The results are presented in Fig. 17.
In the centimeter range the investigated surfaces (probability of correct identification PCI is 0,95) are well distinguished. In decimeter one - PCI worse and is 0,8. In the meter range the effect of vegetation is not enough and PCI =0,5.
Fig. 17. Definition of identification quality of soils with vegetation. (PCI - probability of correct identification; ranges: cm - centimeter, dm - decimeter, m - meter)
The Results of the vegetation coverage remote sensing
As the first way of interpretation RI the data processing by the method of pair correlation has been chosen. In the test plot it has been selected 12 control sites, which characterized the condition of ground lands at the survey moment. The following parameters were evaluated: the area of projective cover of plants, their altitude and moisture, volume moisture of the agricultural background. The last parameter is the complex characteristics of the agricultural background showing moisture content in quasi-volume of the vegetation coverage:
Wa=Wr/H*S, (12)

379
where: Wa - volume moisture of the agricultural background, Wr - vegetation moisture, H - vegetation altitude, S - the area of projective cover. The processing results are in table 6.
Table 6. Values of correlation coefficients between the data of the radar survey and characteristics of vegetation
Parameter SLR-3 SAR-23 SAR-180
Wa 0.78 0.68 0.40
H 0.20 0.27 0.04
Wr 0.61 0.73 0.57
where- Wa - volume moisture of the agricultural background, H-altitude of plants, Wr- moisture of plants.
The analysis of correlation coefficients shows, that the closest connection is
observed between the scattered signals and the agricultural background parameters. Thus the value of correlation coefficients r between volume moisture of the agricultural background and RI data decreases with wavelength increment (rсm=0,78, rdm=0,68, rm=0,4). It is necessary also to note the greater values of a correlation coefficient for moisture content in vegetation.
For the agricultural background analysis, the two groups have been chosen: a) cultivated crops (corn, sugar beet), b) crops of solid sowing (the stubble grain and perennial grasses). The obviously contrast agricultural backgrounds are chosen in the first group, in the second one - very similar.
For each agricultural background in radar images, the "windows" containing of 50 pixels have been chosen. After the primary statistical analysis of data, each field was characterized of 10 ERI. The best identification of the agricultural background occurs during the use of centimeter range data. The classification results are in dendrogram og Fig.18 (in an ordinate axis it is lay Кm-coefficient of merging). According to Throndake's criterion, there are selected four classes in it. The dendrogram analysis shows, that there is clear division of the agricultural backgrounds: corn and sugar beet. They form two not crossed clusters. In turn, the crops of solid sowing are also precisely separated from these agricultural backgrounds. Among themselves, the division of these crops occurs a little bit worse: five ERI stubble grain comes to cluster "permanent grasses". It is explained by various conditions of these crops (altitude of stubble cut and altitude of the permanent grasses plants).
The classification check according to the criterion chi-square (χ2) has shown, that estimated value of χ2 concerning the Yats' correction is - 125, and tabular - 21,67 (for significance level - 0,01). The excess of the actual value of χ2 over the theoretical, shows, that the reliability of identification of agricultural background confirms at 90% of the probability level.
In decimeter and meter ranges of radio waves the identification of the projective cover types occurs much worse because of the negligible agricultural background contribution to the backscattering (see Fig. 19-20). The combined use of several ranges data does not improve classification (see Fig. 21-24).

380
Кm
0
200
400
600
800
1000
1200
4 4 4 4 4 4 4 4 4 4 3 3 3 3 3 3 3 3 3 3 2 2 2 2 1 2 1 2 1 2 2 1 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
Fig. 18. The identification of the agricultural background types according to radar surveys data in the centimeter range of radio waves (λ=3 cm) Explanation: 1-the stubble grain crops, 2-permanent grasses, 3-corn, 4-sugar beet. - division line of denrograms into clusters (according to
Throndake)
Кm
0
50
100
150
200
250
4 3 3 4 3 4 3 2 4 3 2 2 1 3 3 3 4 2 2 2 3 1 3 1 1 1 1 1 1 1 2 1 1 1 4 4 1 4 1 4 2 4 2 1 1 1 1 1 2 1
Fig. 19. The identification of the agricultural background types according to radar surveys data in the decimeter range of radio waves (λ=23 cm) Explanation: 1-the stubble grain crops, 2-permanent grasses, 3-corn, 4-sugar beet. - division line of denrograms into clusters (according to
Throndake)

381 Кm
0
20
40
60
80
100
4 3 1 1 3 1 4 1 4 1 1 4 4 1 4 3 1 4 4 1 1 3 4 1 2 3 1 3 2 1 4 1 3 2 1 1 2 1 1 3 2 2 3 3 2 2 2 2 1 1
Fig. 20. The identification of the agricultural background types according to radar surveys data in the meter range of radio waves (λ=180 cm) Explanation: 1-the stubble grain crops, 2-permanent grasses, 3-corn, 4-sugar beet. - division line of denrograms into clusters (according to
Throndake)
Кm
0 0
100
200
300
400
500
600
700
4 4 4 4 4 4 4 4 4 4 3 3 3 3 3 3 3 3 3 3 2 1 1 1 2 2 2 1 2 2 2 2 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
Fig. 21. The identification of the agricultural background types according to radar surveys data in centimeter (3 cm) and decimeter ranges of radio waves (λ=23 cm) Explanation: 1-the stubble grain crops, 2-permanent grasses, 3-corn, 4-sugar beet. - division line of denrograms into clusters (according to
Throndake)

382 Кm
0
100
200
300
400
500
600
700
800
4 4 4 4 4 4 4 4 4 4 3 3 3 3 3 3 3 3 3 3 1 1 1 1 1 1 1 1 1 1 1 1 1 1 2 1 2 2 2 1 1 1 2 2 2 2 2 2 1 1
Fig. 22. The identification of the agricultural background types according to radar surveys data in centimeter (3 cm) and a meter range of radio waves (λ=180 cm) Explanation: 1-the stubble grain crops, 2-permanent grasses, 3-corn, 4-sugar beet. - division line of denrograms into clusters (according to
Throndake)
Кm
0
20
40
60
80
100
120
2 1 1 1 1 1 1 1 1 1 2 1 1 4 4 4 1 1 4 1 1 4 1 3 3 1 4 4 4 4 4 3 3 1 3 3 2 2 3 2 3 3 2 2 1 3 2 2 2 1
Fig. 23. The identification of the agricultural background types according to radar surveys data in decimeter (23 cm) and a meter range of radio waves (λ=180 cm) Explanation: 1-the stubble grain crops, 2-permanent grasses, 3-corn, 4-sugar beet. - division line of denrograms into clusters (according to
Throndake)

383
Fig. 24. The identification of the agricultural background types according to radar surveys data in centimeter (3 cm), decimeter (23 cm) and meter ranges of radio waves (λ=180 cm) Explanation: 1-the stubble grain crops, 2-permanent grasses, 3-corn, 4-sugar beet. - division line of denrograms into clusters (according to
Throndake)
The results of the researches of the system soil - agricultural background in a three-centimeter range of radio waves The selection of the optimum survey mode
As a rule the radar signal scattered by cultural sowings contains the components caused both vegetation, and a under laying surface of soil [10-15]. One of ways of the edaphic component attenuation of the scattered signal is the selection of a rational survey mode.
To reduce the effect of the roughness and soil moisture the operational frequency of the radar signal more than 8 GHz [16] is normally chosen. Effective enough method of minimization of the effect of the soil mantle is the earth sensing at various angles. As is well known [16], the scattered signal intensity for chaotic and mainly horizontal orientation of deflectors, which is observed for a soil mantle, smoothly decays with accretion of a incidence angle. If deflectors have mainly vertical orientation that is typical for the vegetation coverage, the NRCS increases with growth of the incidence angle.
The carried out by us researches have shown the high variability of values of correlation coefficients specific RCS at various incidence angles from cover and altitude of vegetation coverage, and also from moisture and inductivity of soils (tab. 7).
At the large incidence angles (more than 45º) the linear relation between properties of the vegetation coverage (projective cover and altitude of plants) and scattered signal intensity is observed, and the closest connections between these parameters are observed during the research of territories with the developed vegetation coverage. The inverse dependence is inherent to edaphic characteristics. The closest connections are registered for the areas with the underdeveloped vegetation coverage at the incidence angles of 30-35°.

384 Table 7.
The dependence between the self-descriptiveness of the scattered signal and the incidence angle
Fields ∠º of viewing Кpc Кh Kw Kεf
1f 30-35º 0.19 0.11 -0.53 0.57 1f 47-50º 0.75 0.72 -0.16 0.09 2f 35 -0.05 0.14 -0.70 0.59 2f 50-53 0.31 0.27 -0.67 0.42 3f 35-38 0.65 0.56 0.06 0.18 3f 50-53 0.68 0.59 -0.16 -0.10
where 1f.- fields of sprouts of winter-crops grain (cover 30-45%), 2f - fields of sprouts of winter-crops grain (cover 3-10%), 3f.- fields of sprouts of winter-crops grain (cover 50%), correlation coefficients of NRCS - Кpc (with projective cover), Кh (with altitude of plants), Kw (with moisture), kεf (with inductivity of soils)
The arable areas observation
During the radar researches within the limits of agricultural territories in the early spring and in the late autumn it is confronted mainly with the fields, having no vegetation. The roughness of such kind of surfaces is determined by system of machining of an arable layer. The typical seasonal cycle of tilling leads to formation of cultivated, harrowed, cultivated and sown fields. Their common distinctive feature is quasiregularity of the surface irregularities (in Fig. 25 is the seasonal survey of range No.4 demonstrating the alterations of scattering intensity from the testing area fields during a season).
If during the radar survey the tilling direction is not known, there are ambiguities concerning the result interpretation [17]. The example illustrating it, is in Fig. 26. According to [17] ambiguity because of the unknown processing direction does not pose appreciable problems because the initial quasiregular surface texture in time becomes the less expressed because of water smoothing. The dependence is preserved, varies only σ0. It is impossible to agree with this conclusion unconditionally: according to our researches, in-line structure of the fields in most cases preserved not only after the rain, but even after the melting of the snow cover.
The radar images of the agricultural areas in the early spring are characterized by the patchiness caused, mainly, by distinctions of soil mantle machining, which, in turn, is determined by the amplitude and the space period of surface irregularities.
There are the experimental angular relations of NRCS for fields with soil mantle processed in different ways in Fig. 27. The NRCS values over the range of viewing angles of 25-40º of the most leveled surfaces (the sown field) falls to 6,5 dB whereas for the cultivated and harrowed fields this value does not exceed 5 dB, that confirms the known theoretical calculations [11, 15, 17].
The autocorrelation functions for the fields processed in different ways at the various survey directions to the plowing azimuth are in Fig.28. The fields having plowing direction perpendicular to the survey and the sown fields with sprouts of winter-crops (field 4с) are well enough distinguished. The second group of fields, having the smaller correlation radius, is distinguished during the survey parallel to plowing furrows.
The correlation analysis of geometrical and physical and chemical parameters of the soil mantle, according to ground investigations of 1985 (99 definitions), has detected for NRCS (over the range of incidence angles of 30º) the positive correlation coefficients with root-mean-square altitudes of the surface irregularities. Thus, as evident from the table

385 8, the highest connections are typical for root-mean-square altitudes of the irregularities calculated for a direction, which is parallel to the raying direction though the values measured perpendicularly to the quasiregular structures of the fields, have an important correlation index with NRCS. May July August
February
Fig. 25. The seasonal radar survey of testing area No.4 by using X-band radar
Fig. 26. The experimental angular relations of NRCS for the harrowed fields with the direction of furrows parallel (1) and perpendicular (2) to the survey direction

386 σ0,db -4 -8 -12 -16
20 25 30 35 40 θ, degree
1-cultivated, 2-harrowed, 3- sown fields
Fig. 27. The experimental angular relations of NRCS for fields with the open soil mantle (the survey direction is perpendicular to machining furrows)
R
0.5
0
6 12
F4с
F7
F5F5, 4u, 3
N
Fig. 28. The autocorrelation functions for scattered signals from the fields having the direction of furrows parallel (f7, 4с) to the SLR survey direction and perpendicular to it (f3, 4u, 5)

387 Table 8
The correlations of ECA (θ=300) with physical and chemical and geometrical parameters of the soil mantle
Para-meter
Moistu-re
Mechanical
features
Eh pH Ca2
+ Minera
-lization
Na+ ρ σp;σ⊥
R -0.17 0.10 0.03 0,21 0,20 0,21 0,03 0,23 0,38; 0,31 T 1,65 0,98 0,26 2,13 1,99 2,08 0,27 2,27 3,96;3,12
Note: if the significant parameter of Т is more than 3, the correlation coefficient is significantly different from zero (1%); if Т is more than 2, but less than 3, it is significant (5%); if Т is less or equally to 2 it is not significant.
The linear dependence on ECA values has the density and рН of soil solutions due to the investigated physical and chemical parameters of soils. The identification of crops
The agricultural plants cultivated in range of the remote sensing, are limited by several sorts - corn, barley, permanent forage grasses, sunflower. In Fig. 29 there are the experimental angular relations of ECA for these crops according to the results of the radar survey conducted in the first ten-day period of July, 1986. This period is interesting by that to the end of June - to the beginning of July the plants reach ephebic stages of vegetation. The sunflowers and corn have the highest scattering that is caused by orientation features of leaves and racemes of these crops, and by greater, in comparison with grain, biomass. The sowings of permanent plants and barley have the similar NRCS, it is possible to note a little bit more slightly diagram of angular relation for barley.
As the researches have shown, the seasonal cycle of each of crops, except the lucerne, is characterized by three basic phases [18]. The first phase is the germination and evolution of sowings. This phase leads to gradual increase of NRCS values.
At the period of time specific for each crop the NRCS values are stabilized, it means the passage to the second phase, which corresponds to the ephebic stage of crop with rather constant biomass and the moisture content. The third phase corresponds to the final stage of vegetation - the plant sharply loses the moisture and some of the leaves; the NRCS noticeably decreases. It is possible to observe these phases in Fig. 30 where the sowings of sunflower (1) beets (2), corn (3) are as an example.
Two remote sensing testing areas sown with lucerne, the natural annual cycle of these sowings becomes complicated by periodic mowings. In the experimental diagram Fig. 31 the sharp alterations of NRCS after the haimowing are clearly visible. But, despite of it, it is possible to distinguish the phases of autumnal vegetation, winter dormancy, spring regrowth confidently enough.
During the radar data interpretation the ambiguity identification of crop types are quite often appeared (SLR-3сm). The use of the radar-radiometer (RM-08сm) in the complex of sensors system has allowed to discriminate crop types confidently enough [19-22].

388
σ0,db -4 -8 -12
sunflower
corn
Barley lucerne
30 35 40 45 θ,degree
Fig. 29. The experimental angular relations of σ0 of agricultural plants
σ 0,d b -3
-8
Т я /Т в
0 .8 8
0 .8 6
0 .8 4
M a y Jun e Ju ly A u g u st m on th .
2
3 1
13 2
Fig. 30. The NRCS relation to vegetation stages (θ=30º)

389
σ0,db -14
-16 -18
-20
2 3 4 5 6 7 8 9 10 month.
haymowing haymowing
Fig. 31. The NRCS alterations during the vegetation of permanent grasses (θ=500)
The data complexation of aerospace radar sensing and contact measurements in natural testing areas have allowed:
1. To work through the processing of results and the techniques of the complex experiments including realization of flight and ground measurements of surface.
2. To determine the criteria of the ground ranges selection both investigated parameters of soils and the vegetation coverage, having the main contribution in scattered and emitted.
3. To determine the essential effect on the scattered signal of the vegetation coverage parameters. Thus the vegetation effect on the scattered signal decreases with increase of the radar wavelength. The volume moisture of the vegetation is the optimal parameter, describing the vegetation contribution in formation of the scattered radio signal. Thus, the best division of various types of crops occurs in X-band. The appearing ambiguity during the identification of cultivated crops (the sugar beet, corn, sunflower) and solid sowing (various gramineous, permanent grasses, the stubble) it was possible to remove for the first time, by the combination data of X-band SLRAR and Ka-band radiometer.
4. To detect during the seasonal measurements in X- and Ka-bands the alterations of ECA and of the radio-brightness temperature, caused by basic phases of crops evolution. To build the experimental angular relations of ECA for sowings of sunflower, corn, the sugar beet, barley, permanent grasses during the maximal biomass evolution.
5. To determine, that the most comprehensible angles of edaphic component observation in CM range are the angles 20º-40º, and to research the vegetation layer - angles more than 45º.
6. To show due to the analysis results of the edaphic component that there is a connection between data of radar sensing for density of the top-soil in depths of 0-20 cm, and this connection decreases while increasing of the radar wavelength and while increasing of the layer depth of the penetration.
7. To detect, that between data of summer radar survey at X-, L- and VHF-bands and weight soil moisture there is an average degree of relation (r=0,45 … 0,53).

390 The best interconnection is observed for the L-band data with volume moisture of soils in the surface layer of 0-10cm.
8. To identification the fields with soils of a various granulometric composition according to multifrequency sensing that has proved the possibility to divide soils into districts. Thus the best identification of soils according to the granulometric composition is observed for a data combination of the X- and L-bands.

391
References to the Appendix 1 1. Practical work on the soil science. Edited by I.S.Kaurichev. Moscow: Pablished house
"Agropromizdat", 1986.-335p. (in Russian). 2. Chapovsky Ye.G. Laboratory works on the soil science and mechanics of soil.
Moscow: Pablished house "Nauka", 1975.-303p. (in Russian). 3. Peak W.H. Theory of radar return from terrain //-IRE NAT. Conv. Rec.-1957. - №7. -
P.34-43. 4. Orlov R.А., Тоrgashin B.D. Modelling of radar reflections from a earth surface.-
Leningrad: Published by LSU, 1978.-148p. (in Russian). 5. Bendat J., Pirson A. Measurement and the analysis of random processes. Moscow:
Publishing house "Мir", 1971.-408p. (in Russian). 6. Kalmykov А.I., Fuks I.M., Jatsevich S.Ye., et al. Multifrequency radar monitoring of
vegetative covers, soils and subsurface formations. // Reports of the international scientific seminar on space monitoring of covers and atmosphere. - Published by society "Znaniye".-Kiev.-1993.-Vol.2. - P. 83-84 (in Russian).
7. Jatsevich S.Ye., Efimov V.B., Tsymbal V.N., et al. Researches of soil resources on multifrequency radar data. // Kosmichna nauka I technologiya.-1999.-Vol.5, №2/3.-P.34-40 (in Russian).
8. Kim J.О., Mjuller Ch.U., Klekka U.R., et al. Factorial discriminant and cluster analysis: Translation from English. Moscow: Publishing house "Financy i statistica.-1989.-215p. (in Russian).
9. Achasov А.B. Volosyuk V.G. Interpretation technique of soil radar investigation data // Materials of the international scientific conference, which is devoted to the 100-anniversary from the date of the basis of the Odessa agricultural research station,-Vol.1, - Odessa,-1996,-P.8-9 (in Ukrainian).
10. Radar methods of the Earth researches / Yu.А.Melnik, S.G. Zubkovich, V.D.Stepanenko et al. / Edited by Yu.А. Melnik. Мoscow: Publishing house "Sovetskoye radio", 1980. -264 p. (in Russian).
11. Kulemin G. R., Shcherbinin I. V., Yatsevich S. E. et. al. Physical Principles of Microwave Remote Sensing of Terrains // Proc. of the 6th physics international school “ Microwave physics and technique ”-Varna (Bulgaria.) - World Scientific Publ. Co. Singapore, Utopia Press.-2-7 Oct. 1989,-P.16-33.
12. Ulaby F.T., Baltilava P.P, Dobson M.C Microwave backscatter dependence on surface roughness, soil moisture, and soil texture. Part 1-Bare soil // IEEE Trans. Geosci. Electron..-1983.-V.16, №4.-P.286-295.
13. Ulaby F.T., Aslam A., Dobson M.C. Effects of vegetation cover on the radar sensitivity to soil moisture // IEEE Trans. Geosc. Remote Sens.-1982.-Vol.20, - №2.-P.476-481.
14. Hallikainen M. T., Ulaby F. T., Dobson M. S., EI-Rayes, Lin-Kun Wu. Microwave dielectric behavior of Wet soil // IEEE Trans. Geosc. Remote Sens.-1985.-Vol.23, - №I.-P.25-34.
15. Zerdev N.G., Kulemin G.P. Determination of soil humidity by using the multichannel radar methods // Issledovaniye Zemli iz Kosmosa.-1993. - №1.-P.90-95 (in Russian).
16. Ulabi F. T. Radar-tracking signatures of a terrestrial surface and the control of renewed resources // Proceedings of the IEEE. -1982.-Vol.70, N 12.-P.43-64 (in Russian).
17. Ulaby F.T Vegetation scutter model // IEEE Trans. Antennas Propagat.,-1980.-V.28, №4.-P.538-545.
18. Ulaby F.T., Buch T.F. Corn growth as monitored by radar // IEEE Trans. Antennas Propagat..-1976.-Vol.24, №6.-P.819-828.

392
19. Kalmykov А.I., Shcherbinin I.V., Yatsevich S.Ye. Complex for radiophysical researches of agricultural soils // Proceedings of the AS of UkrSSR, Commission of space researches and Metallophysics Institute: Space science and technics. - Kiev: Publishing house "Naukova dumka". -1990. -P.32-36 (in Russian).
20. Jatsevich S.E., Gavrilenko A.S., Yelensky L.V., etc. Research agricultural soil possibilities by using the active - passive radiophysical facilities from space carriers // Report thesis's of the All-Union conference "Space methods of biosphere studying". Published by the Commission AS of the USSR on studying natural resources with the help of space facilities and Institute of geography of АS of the USSR. Zvenigorod, April, 25-27, 1988. -P.48 (in Russian).
21. Shilo S.A., Jatsevich С.Ye. Experimental studies of radio radiating characteristics of a vegetative cover at Ka-band wavelength // Proceedings of the AS of UkrSSR, Institute of radiophysics and electronics: Radiophysical methods and facilities for researches of an environment at Ka-band wavelength. Kiev: Publishing house "Naukova dumka",-1988. P.31-38 (in Russian).
22. Kalmykov A.I., Shcherbinin I.V., Chaplya Ye.Ya., Jatsevich S.Ye. Full-scale radiophysical studies of agricultural soils and fields // Report thesis's of All-Union scientific and technical conference "Methods of representation and processing of random signals". Kharkov, Edited by KhIRE. -1989. - P.137 (in Russian).

393
THE ANNEX 2 FEATURES OF THE ANTENNA SYSTEMS OF EOS PERSPECTIVE SPACE RADARS §1. The high resolution antenna system of the space SAR with the on-line beam
control
The scanning antenna has been chosen to be used in the structure of space SAR of high resolution. This antenna uses the effect of surface waves conversion, that because of its usability and low price distinguishes it from the active phased arrays with an on-line beam setting in the elevation plane in electronic way, which are widely used now in produced space SAR of high resolution.
This new category of the diffraction radiation antennas [1] is developed at IRE NAS of Ukraine during the last 20 years on the basis of systematic investigation of the conversion effect of slow surface waves of the dielectric waveguide into space ones by means of grating, which has begun in 1973-1975 [2] under the direction of the NASU academician V.P. Shestopalov.
These antennas feature is that there is used the grating as the radiating element and as an excitation source – the dielectric waveguide. Unlike the microstrip antennas they possess the smaller losses, and unlike the slotted-guide antennas are much more practically feasible ones. The comprehensive investigation of the scattering properties of the various gratings and of wave-guiding features of the dielectric waveguides has allowed to formulate the requirements to the beam formers of such antennas [3,4]. These requirements meeting enable to form the radiation patterns of the complex shape, including cosecant one [5].
The special place in this new category of radiators is taken the electrodynamic schemes of the scanning antennas based on the planar dielectric waveguides (PDW) with the oblique structures, placed in their near field space. The theoretical investigations of PDW surface waves scattering by the oblique one-dimensional-periodic strip array and the development of strict method of the problem solution concerning the plane wave diffraction on it are considered in monograph [6]. Further, after the experimental research of the space, power, polarization and resonance characteristics both the strip array, observed earlier in theoretical way, and electrodynamic schemes with various reflectarrays [7,8], including the two-dimensional-periodic ones [9], the possibility of the creation of scanning antennas with beam position control by means of rotation or tilt of the grating elements has been valid. Thus, in the antennas of the millimetric waveband have been discover the new outlooks of the wide-angle scan implementation by means of beam in electromechanical way.
Such electrodynamic schemes implementation in particular devices [10] has shown, that the diffraction radiation antennas have the high electrodynamic characteristics, reliability, durability and stability of their parameters. Therefore the antenna electrodynamic scheme, including the line of the surface waves as PDW and the rotary grating, has been taken as the basis of the creation of an antenna array (АA) of the centimetre band high resolution space SAR with the on-line beam positioning. The electrodynamic scheme of the scanning antenna array.
To describe the action of the scanning AA on surface waves we shall consider the electrodynamic scheme of the scanning antenna in fig. 1. The considered scheme of the antenna consists of the inhomogeneous plane wave source as PDW 2, lying in YO plane, along the OZ axis of which propagates the -wave.
ZE

394
Fig.1. The electrodynamic scheme of the scanning antenna
On some distance along OX axis from PDW parallel to it there is a scattering screen – the grating 1, which elements - grooves are at some arbitrary angle α to the direction of the PDW surface wave propagation with phase velocity . In the considered case the propagation direction of radiating part of the scattered space spectrum oversteps the limits of the plane, containing the direction of the PDW inhomogeneous wave propagation. The space position of the radiated part of the field generally is determined by two angles
phV
nθ and
nϕ which can be obtained from the following expressions:
( )/ coscos
cosnn
U n χ αθ
ϕ+⎡ ⎤⎣ ⎦= , (1)
( )sin / sinn nϕ χ= − α , (2)
where nθ - the angle between projection of radiated space wave vector vк to the
plane and OZ axis;
XOZ
nϕ - the angle between the direction of wave vector of the corresponded scattered harmonic and its projection to the plane; =-1,-2,..., - the array diffraction harmonic number;
vкXOZ n
λ=χ /l , - the array period; l λ - wave length; U - wave slowing factor in the planar dielectric waveguide. As a rule, to produce the scanning antenna it is used the mode of the first spatial harmonic ( =-1) and the basic wave type in PDW.
n
According to formulas (1, 2) the beam position in the diffraction radiation antenna (fig.1) is determined (if the wave length is fixed) by means of the period of the unidimensional array, the slowing factor of the dielectric waveguide and the tilt of the array elements. By smooth altering of these parameters it is possible to vary the beam position in very broad limits, therefore choosing the electrodynamic scheme as basic one, the main question of the development is the definition of the alter method of parameters
, ,U αl in an offered structure. As an additional parameter it is possible to consider the rotation angle of the whole system with PDW. Such rotation leads to conical type of scanning.

395
Let's consider the basic methods of scanning in diffraction radiation antennas. The first method is realized by means of slowing factor U altering. It is realized by entering of additional dielectric or metal into PDW space. The receiving alter of the phase velocity of the wave in PDW allows in small limits to vary the angle 1θ− − to 10°÷15°. This method is ineffective because during the scanning, the coupling of PDW with the array is essentially altered and the radiation pattern shape is strongly distorted. The radiating efficiency is essentially altered too.
The second one – due to altering of grating period . Altering the period when ≈1,2 it is possible to vary the angle
l lU 1θ− within the limits of 80°÷150° keeping the
single-wave mode of radiation. Scanning in sector of angles 1θ− , which are equal to 150°÷180°, is complicated by sharp increment of requirements to reproduction accuracy of the demanded value of l period on the one hand. On the other hand, at these angles the effective aperture of the antenna under the law 1cos(90 )θ−° − is slumped and as
consequence, the radiation pattern is inadmissible enlarged. The period altering is resulted by the gratings changing, located on a drum. This method is successfully realized in antennas of automobile radars and is based on linear dielectric waveguide [4].
l
The third method is the most simple to realization. It is realized by the grating rotation to vary the angle α [7]. In this case, the grating is done on the round disk, the rotation of which is mainly leads to the angle ϕ varying. Unlike the array obliquity [6] the
angle 1θ− is more varied in this case, but the constructive solution is provided to be more easy. If there are values of the slowing factor U , which are within the limits of 1,05÷1,2, and the initial value of the angle 1θ− =90°÷120° the sector of the scanning angles
1ϕ− =±60° is resulted by grating rotation to the angle of α =±35°. Thus, the task of scanning or beam steering in sector ±30° in the same plane is provided to be solved.
For beam steering within the limits of the space angle of 60° it will be necessary to alter one more parameter in the system (see fig.1). As it had been shown, the altering of the period l has very limited possibilities. Thus, we shall consider as the additional parameter the rotation of the PDW 2 together with the grating 1 in the plane passing through the equal phase line in PDW. For consideration simplicity we shall suggest, that the initial angle of
1θ− =90° if α =0° (radiation in normal to PDW plane). Further we shall suggest, that PDW is placed horizontally and, therefore, at the initial conditions (α =0°) radiation is occurred vertical upward. The grating rotation to the angle of α ≠0° leads, as it had been shown, to scanning in plane passing through the vertical. If the whole system (PDW with array) is to be rotated now in the horizontal plane, the potential positions of the radiation pattern would occupy the whole space angle 60°, which is counted from vertical. Thus, the planar AA, which consists of PDW and unidimensional grating, solves the task of the beam steering in space angle of 60° at the sequential rotation of the grating concerning PDW and combined rotation of the AA in horizontal plane. The position of the radiation pattern maximum in the chosen coordinate frame is determined as follows: tilt angle is 90°−ϕ °, and the azimuth if
1θ− =90° to 90° differs from the direction of the wave propagation in PDW. If radiation in normal to the PDW surface if α =0° is undesirable (because of high standing wave ratio), the initial AA beam position should be done so that the angle value of 1θ− if α =0° is

396
within the limits of 80°< 1θ− <120°. It provides the maximally effective use of the aperture area and single-wave mode of the radiation.
The polarization features are the important characteristics of the optional AA. From demands of space SAR it is follow, that the polarization of the AA radiation with the on-line beam steering must be linear one. There are some gratings corresponding this demand [6,11]. These are the array of thin metal wires during the operation at -wave in PDW, the strip array with the narrow slots at -wave in PDW etc.
HE
Let us formulate some additional demands to the polarization of radiation and to the polarization ellipse orientation with reference to the considered case. In the chosen coordinate frame, when PDW is horizontal, the scanning by means of the angle α varying generally leads to the altering of the radiated wave polarization. Initially the horizontal polarization can become vertical one and on the contrary. That is why it is desirable to choose such kind of the scatterers, which would not alter the polarization of the scattered field during the scanning. This question will be considered below for more details together with the validation of the advisability of using of the scatterers with the circle configuration. And the beam scanning by means of PDW rotation in horizontal plane together with the grating in its self does not alter the polarization of the scattered field and does not require the individual considering. The planar transmission line with the excitation unit
The surface waves transmission lines include a wide class of dielectric, metal-dielectric and periodic slowing structures [12,13]. The choice of any transmission line as basic one for the AA is determined by many demands, which are often contradictory. Among them is the demand to provide the minimum losses, the possibility of easy coupling with the radiating elements, the comfort of excitation, the high technological effectiveness and the construction inflexibility. The described in [12] planar dielectric waveguide is the elementary transmission line of the surface waves’. Let us consider the features and peculiarities of its use in AA of three centimetre range.
The main PDW waves are and , which have zero cut-off frequency. The PDW features to maintain the slow surface waves are first of all determined by slowing factor
1E 1H
phU C V= , where –light speed in free space, –phase velocity of the surface
wave. The value of the slowing factor smoothly alters from 1 to
C phV
ε , where ε - dielectric permittivity of the waveguide material, in altering of the thickness of the dielectric waveguide from 0 to ∞, fig.2. ( -wave of PDW, 1E ε =2.5 [polystyrene], ε =2.25
[polyethylene], ε =2.05 [Teflon]). If the slowing factor is larger (U ε≈ ) the slow surface wave is well associated with the guiding structure, i.e. the main part of its power is propagated within the limits of the layer of the dielectric and the negligible PDW deformation does not lead to radiant losses. The distinguishing feature of this case is the large value of the longitudinal components of the electromagnetic field. The coupling realization of the surface wave on the grating elements is embarrassed because of low (fig. 2) intensity of the electromagnetic field in space, surrounding the dielectric.
If the slowing factor is low (U ≈ 1) the predominant components of the field of the surface wave are transverse components. The great part of the surface wave power is propagated in space, which is adjacent to the PDW surface, that at the negligible deformations of it leads to significant radiation losses. The coupling realization of PDW with the grating has some peculiarities. The coupling of PDW wave with the array due to longitudinal components of the field is negligible, and the strong coupling of the grating

397
with PDW by its simple approaching to the dielectric surface essentially distorts the initial structure of the surface wave field, it may sometimes to move it to the class of the quick leaky waves. The certain difficulties occur in excitation of the PDW wave with small losses and PDW fixing to the inflexible elements of the AA.
Fig.2. The dependence of the slowing factor U on thickness a of the dielectric waveguide for different ε of the waveguide material
The losses are the important characteristic of any transmission line. The
attenuation coefficient of the eigenwave of the dielectric waveguide is determined by the quality of the used dielectric and by the structure of the field [12]:
1(27,3 )K tgβ ε δ= ⋅ ⋅ λ , dB/m, where δ -angle of the dielectric losses, - structural attenuation constant. Numerically the attenuation constant is equal to the ratio of attenuation of such kind of wave on attenuation of homogeneous plane wave in borderless dielectric medium. The value of the structural attenuation constant is vary from 0 to 1 if the slowing factor U is altered from 1 to
1K
ε . But if the slowing factor had average values, it is possible >1. The excess of surface wave attenuation in the dielectric waveguide over the - wave attenuation in the unlimited dielectric space is explained by the presence of the longitudinal components of the field in the slow wave. These components are not participated in the transmission of energy along the line, but they are in energy dissipating to the dielectric heating. From the other hand, if to use the decomposition of the PDW wave into Brilluen waves [14], it is possible to show, that the Brilluen homogeneous plane waves propagation in the layer of dielectric at some angle to the PDW axis leads to the simple geometrical increase of the TE - wave transmission path in the layer of dielectric. Taking into account the stated, the optimal value of the slowing factor must be (U -1) ≤
0,1÷0,2(
1KTEM
M
ε -1), the low border of the U value is define by the acceptable radiation losses in the excitation unit and in the fastening elements of PDW.
Unlike the electrodynamic model, the real construction of the AA requires to decide the question about the inflexible fastening of the PDW and about the planeness of its surface and of the grating surface. This problem is the sharpest if there are large sizes of the radiating aperture onboard the space craft. In this case the radiating aperture demands the

398
inflexible basis. These demands completely meets the plane metal surface over which there are PDW with some interval or tight.
It is possible to reduce the weight through the use of the semitransparent grating, placing over the dielectric waveguide. But for all that, the electrodynamic model of the AA is essentially altered. The altering of the coupling law of the PDW on the array subject to the distance between them is the main. In the initial electrodynamic scheme (fig. 1) this dependence is exponential, because the intensity of the dielectric waveguide field is decreased while its receding from its surface according to the law )xp( −exp , where
x - the distance from the waveguide surface to the array, 22 1πp Uλ
= − - the
transverse wave number. In diagram (fig. 1) the surface wave of the dielectric waveguide excites the elements of the diffraction reflect array and, meeting the radiation condition, the space wave, which is formed by the array, goes through the PDW as through the plane-parallel layer of the dielectric with low coefficient of scattering and goes into the free space. In case of the semitransparent grating and PDW the physical process are completely the same to the described ones. The single distinguish is in the formation of two beams both sides of the array. If the PDW is over the metal screen (substrate), there is the interference between the beam, directing from the semitransparent grating into the free space immediately and the beam, which has passed through the PDW, scattered from the metal screen, has passed through the PDW for the second time and partly passed through the grating. If the PDW, grating and screen are fully parallel, there are the effects of the interferences in the parallel beams, which are similar to the described ones in [15]. The law of variation of the grating coupling on PDW become differs from the exponential one. To a first approximation it is applied to it the dependence like sin xγ . It is not inconceivable the total radiation damping into the free space, thus this electrodynamic scheme requires the additional experimental investigation to define its parameters and admissible relative position of its components.
The experimental investigations in centimetre range has shown, that irrespective of any kind of the grating (strip, wire, round mesh screen) and of the wave type in the PDW there is a maximum of the array coupling with PDW wave if there is an optical path between the array and the screen, which is 4 n 2λ λ+ , where =0,1,2,3,…, if the distance between the PDW and the array is permanent. The coupling minimum is correspond to the distances of
n
2nλ , the power take-off values for this PDW and array can be from 0,5 to 10 dB. Thus, the choice of the dielectric waveguide slowing factor is provided to be as interrelated with the mutual position of the PDW and of the screen. The PDW parameters optimisation, considering the possible position of the grating, has shown, that if there is an -wave it is suitable the waveguide of polystyrene (H ε =2,5), with the slowing factor U =1,16, which has to be on distance of 8 mm from the screen, if the dielectric thickness is 2 4à = mm. The corresponding to the maximum coupling distance between the PDW and the array is 6 mm. The wire grating with the thickness of each wire
=0,5 mm, =20 mm gives the power takeoff value of 11,2 dB/m if =11,3 GHz; the array of round meshes in the screen (Ø=12 mm, =17,5 mm, =11,3 GHz) has an effectiveness of 14,8 dB/m. If there is an -wave the optimal is the waveguide with the thickness of 2 mm (
d l fl f
Eε =2,5), located directly on the metal surface (U =1,045). The
corresponding to the maximum coupling distance between the PDW and the array is 17 mm. The interaction effectiveness value of the PDW wave with the array of the round meshes in screen is 12 dB/m. Thus, the both structures are provided the suitable value of

399
the power takeoff. The final choice of the PDW is define after the considering of the question about losses and about the exciter of the slow surface wave.
The four PDW samples of polyethylene (ε =2,25; tgδ =0,5×10–3) and of impactproof polystyrene (ε =2,5; tgδ =10– 3) are experimentally investigated. The choice of the last one as a PDW material is caused by its prevailing and good technological properties. The PDW samples with the wide of 140 mm and with the length of 1m were fastened in the metal cassette provided with the horn-and-lens transition to the metal hollow waveguide. There were two samples of the cassettes to excite the and -waves. At the cassette end was a shorting device, and the losses were defined according to the value of the scattered wave slackening during the double passing through the structure after the losses subtraction in the horn-and-lens transition. For -wave,
E H
H 2a 4= mm, for the impactproof polystyrene β =0,94 dB/m; for the polyethylene ( 2a 4= mm) β =0,34 dB/m. For -wave, =2 mm, for the impactproof polystyrene
Ea β =0,46 dB/m; for the polyethylene
β =0,31 dB/m ( a =2 mm). All the variants with the losses less than 0,5 dB/m are suitable. It should be note that these values of losses are corresponding to the total losses in the transmission line – to the overall losses in the dielectrics and in metal. The use of the thin polyethylene ( =2 mm) is unsuitable because of its complex mounting and fastening to the metal screen.
a
Let’s consider the question about the excitation of the slow surface waves in the PDW by means of the comparative analysis for - and -waves. It is known, the flat phase front in the planar transmission line can be formed by means of the refractive or scatter phase correctors, located after the planar horn with the cylindrical phase front of the wave at the outlet [16]. It is expediently to realize the horn-and-parabolic or horn-and-lens transition in terms of the metal hollow biplanar transition, considering the linear losses in centimetre range of the wave in it are lower, than the losses in metal-dielectric waveguides, considered above. The first investigated model was the horn-and-lens transition at TEM wave in the biplanar metal waveguide with the distance between the walls of 10 mm. The exit aperture was 750 mm, the distance from the phase center of the horn to the exit aperture is 750 mm, the lens thickness 205 mm at the height 10 mm. The lens profile was hyperbolic one, directed with its convex part to the horn [17], lens material is Teflon. Losses value had received in transition of 1,5 dB, that is inadmissible on antennas, demanding the maximum gain constant. This high value of losses is determined, besides scattering from lens surfaces, by the wave front phase aberration due to loosely fitting of lens surfaces to the metal walls.
E H
The second of the transition researched was the horn-and-parabolic exciter at H-wave with parabola focal distance of =400 mm and with exit aperture of Ø =700 mm. The distance between walls of biplanar waveguide has been chosen as equal to 23 mm. Integrally the transaction had the better parameters in comparison with the horn-and-lens transition at TE - wave, it had, however, a series of undesirable peculiarities. It turned out, that to provide the set distance between the walls of biplanar waveguide it was necessary to place 10 metal supports 23 mm high between them. In other case the phase velocity fluctuations of fast -wave had led to the significant phase aberrations at the exit aperture and to the efficiency loss. Another peculiarity was the higher diffraction losses at the edge of horn transition. At the chosen parameters of parabola ( =400 mm, Ø =700 mm) the maximum possible length of small wall of -plane horn is 2 – Ø =100 mm. Since the –plane horn forms at the exit aperture the uniform amplitude distribution, the field density at the end of horn wall turns to be still very high, despite the just began
f
M
H
fE f
E

400
process of cylindrical divergent wave forming. Setting the short circuitor at the exit aperture of horn-and-parabolic transition so, that is the prolongation of the horn small wall, the losses due to the wave double transit (to the short circuitor and back) is equal to 0,5 dB, it gives the seeming value of losses of 0,25 dB. If to move the short circuitor at 20÷40 mm in the divergent direction of excited wave, the double losses are increased up to 1dB, it gives the true value of losses of 0,5 dB.
The horn-and parabolic transition at the TE - wave appears to be the best of investigated ones. At the focus distance of =400 mm parabola the exit aperture was 750 mm. The distance between the walls of biplanar waveguide was chosen as equal to 9,5 mm. The losses for one transit to the exit aperture was 0,2 dB. The transition is inert to fluctuations of distance between the walls, the diffraction losses at the small wall of -planar horn are insignificant due to field cosine distribution at its exit aperture, and the received value of losses 0,2 dB is determined mainly by the ohmic loss in the walls of biplanar waveguide. This horn-and-parabolic transition is process, and had accepted as the basis during AA development. An important component of AA construction is PDW exciter placing toward radiating aperture. In devices described in [16] had applied the direct joint of exciter and PDW when they are located in one plane. This method is different by ease of realization; it leads, however, to the significant increasing of antenna dimensions in comparison with the radiating aperture itself. During these investigations, according to the recommendations [18], it had been developed -planar turning in 180°, which schedule is shown in the fig.3. Total losses measurement at horn-and-parabolic transition and turning in 180° had led to the value of 0,4 dB (at one transition). Turning in 180° usage significantly increases the floor-space ratio of total aperture, increases the construction stiffness and save the materials.
Mf
H
E
Fig. 3. Schedule of -planar turning in 180° E
The completion phase of PDW exciter creation was the construction development of horn transition from hollow metal biplanar waveguide to PDW on the metal substrate. It had been investigated four horn transitions with horn wall length of 160, 100, 60 mm and 40 mm, with flare angles of 18°, 17°, 16° and 10° accordingly. The first horn almost had no losses for radiation, but had the great length. The second one had losses of 0,05 dB, the third and the fourth horns had not more than 0,2 dB. Taking into account the requirements of minimum losses with the minimum dimensions it had been chosen the fourth horn. Thus the use of planar waveguide of polystyrene with thickness of 2 mm, which is directly placed on the metal shield, the use of horn-and-parabolic transition with parabola focal distance of 400 mm at the exit aperture of 750 mm, the use of -planar turning in 180° and horn transition from hollow metal biplanar waveguide to PDW are completely founded in developed AA.
E

401
Planar periodic scatterer of antenna array
As it had been shown above, the planar periodic scatterer for AA has to look as translucent grating according to the choice as PDW the dielectric layer, located on the metal shield. It has to provide the effective conversion of the slow surface wave of PDW into the space one. With this purpose in operating condition the attenuation of PDW wave due to radiation should be within the limits of 10÷20 dB/m. The choice of array period has to exclude the appearing of higher radiating spatial harmonics in the operating section of angles. The polarization of the beam has to be unaltered as far as possible. The array should be easy to produce and inexpensive. All of these demands had to be considered, choosing either one or another structure. Preliminary experimental investigations of strip gratings had shown that they have insufficiently high efficiency in case of small slowing factor of PDW
–wave. Furthermore, scanning by means of array turning leads to very significant polarization ellipse turning, to high ratio of wave conversions ellipticity and, in some cases, to the undesirable resonant effects [8]. The searching for new kinds of gratings had led to grating consideration as round openings in the thin metal shield, which are located periodically with the periods of and in two mutually perpendicular directions. The initial conditions was the hypotheses about polarisation independence of emitted wave from the array turning angle α in view of elementary radiator circular symmetry and of expected greater efficiency in view of resonance volume appearing between the array and shield, where is PDW. To solve the problem of single-beam mode let us consider the conditions of scattered spatial harmonics appearing much as it done in [9].
1E
1l 2l
Let us to consider the electrodynamic system, composing of two-dimensional periodic array of reflect type of arbitrary profile (grooves, openings, pins etc.) and of planar dielectric waveguide (PDW), having permittivity ε . The PDW and the comb are located in mutually parallel planes. Let’s insert the coordinate frame X Y Z , concerning the PDW and frame X'Y' Z' , concerning the array (Fig. 4). Axis OZ coincides with the propagation direction of inhomogeneous wave in PDW, axis is perpendicular to plane of PDW. Axis OX' coincides with the OX axis, axes OZ and OY coincide with two main directions of periodicity with the periods of and accordingly. The array
position is characterized by the angular deflection
OX' '
1l 2l
α - angle between OZ and OZ' axes. Positive value of α are counted anticlockwise. If α =0° frames X Y Z and X'Y' Z' coincide.
Considering the array periodicity in the directions OZ' (index ″ n ″) and OY (index ″ m ″), the component of scattered field
'yH ′ for –wave in PDW can be written as
follows: E
( )cos exp ,ó n m x n m ó mn m
H a j x h óα γ γ∞ ∞
= − ∞ = − ∞
′ ′ ′ z n zγ′ ′ ′ ′⎡ ⎤= − + +⎣ ⎦∑ ∑ (3)
here –depth of periodical heterogeneousness on the array; - amplitude ratios; h n ma
nzmуmnx γγγ ′′′ ,, - components of waveguide vector vк of scattered field in
coordinate frame X'Y' Z' . According to Fig. 4:

402
( )222
1
2
2
2
nzmуmnx
znz
уmу
k
n
m
γγγ
πγγ
πγγ
′+′−=′
+′=′
+′=′
l
l
(4)
where =0,-1,-2,… ,n m
Fig.4. Electrodynamic system of two-dimensional periodic array of reflecting type and
planar dielectric waveguide
After the coordinate frame conversion it is possible to obtain the expressions, joining the spatial characteristics of scattered field with the parameters of electrodynamic system “PDW-array”:
2
2 1
2 1
sin coscos
1 cos sinn m
m nU
m n
α αχ χθ
α αχ χ
+ +=
⎛ ⎞− −⎜ ⎟
⎝ ⎠
(5)
2 1
sin cos sinn mm nϕ α
χ χ= − α (6)
where 1,2 1,2 ,χ λ λ= l -wave-length in free space.

403
If =0 or =0 expressions (5) and (6) converse into the corresponded expressions for radiation angles on the independent mutually perpendicular one-dimensional periodic arrays, superposition of which forms the investigated two-dimensional periodic structure.
n m
Calculations of ( )n mθ α and ( )n mϕ α , made according to formulas (3)–(4) for
harmonic (-1,0), (0,-1) and (-1,-1) at different meanings of U , 1χ and 2χ , are shown in the Fig.5. The meanings of U , applied in calculations, correspond to PDW of Teflon with permittivity ε =2,05 and thickness of 2 mm. In the Fig.5 the experimental meanings of
n mθ and n mϕ are marked with crosses. As can be seen from Fig. 5 there is some initial angular deflection of array for each harmonic. If at this harmonic is surface one, it won’t be
space one at no other meanings of α , thus angle can be considered as initial
radiation angle. For harmonic (-1,0) angle =0°, and for harmonic (0,-1) angle
=90°, e.g. in both cases the meaning of corresponds to the array position, when this direction of periodicity coincides with the propagation direction of the inhomogeneous wave in PDW. For the harmonic (-1,-1 ) angle =45° at =
and ≠45° at ≠ . Besides, for any harmonics the function
( , )0
n mα ( , )0
n mα α=( , )0
n mα( 1, 0 )0α −
( 0, 1 )0α − ( , )
0n mα
( 1, 1 )0α − −
1l 2l( 1, 1 )0α − −
1l 2l ( )n mθ α is even,
and function ( )n mϕ α is odd concerning . Always ( , )0
n mα α= ( )( , ) ( , )
0 0n m n mϕ α = °. (7)
Fig. 5. Dependences of ( )n mϕ α and ( )n mθ α from the angular deflection α for the
harmonic (-1,0), (0,-1) and (-1,-1) at the different meanings of U , 1χ and 2χ

404
Condition (7) and formula (6) allow to obtain the expression for the initial radiation angle
( , ) 10
2
,n m mtgn
α =l
l (8)
from here we have at m =0: =0°, at n =0: =90°, at n = and =
=45°, at n = and =3 mm, =2,3 mm: =52,5°, that completely
corresponds the experiment. Thus, the proper choice of periods and at given U allows to realize the one-wave radiating mode. The array turning to the angle of 90° provides the additional opportunities concerning the beam setting in some space angle.
( 1, 0 )0α − ( 0, 1 )
0α − m 1l 2l( , )0
n mα m 1l 2l ( , )0
n mα
1l 2l
Power and polarization features of the two-dimensional periodic array in the space angle 60°.
The electrodynamic coupling of PDW with the array is determined by the value of that part of incident field at the output of PDW ( ), which after the transition of interaction path with the array does not alter its polarization. The less this field the stronger the electrodynamic coupling and the more effective the incident wave conversation. It is convenient to insert the coupling ratio, which, for example, for -wave at the input of PDW looks as follows:
tE
E
[,0,
( )dBt õ
ct õ
EK
Eα
= ] , (9)
here -value of the field at the output of PDW when the array is miss. 0,t xEThe dependence of on cK α in general case is non-monotone and has a series of
resonances, which are able to influence significant on the power and polarization features of radiated field. Some of these resonances, which are peculiar to the two-dimensional periodic systems, formed by the isotropic scatterers by the round opening for example, are considered below.
It is known that to the moment of appearing or disappearing of the radiated harmonic in resonance way the coupling ratio of incident field with the array alters. Particularly at those values of angular deflection of the array, when the spatial harmonic become sliding one, e.g. at , the very effective extraction of energy from PDW (coupling value is increased) can take place.
( , )n msα α=
The angular position of this resonance ( )( , )n msα is determined by the expression
(5) and by the condition cos n mθ =1.
According to the theory of array coupling element [19] the coupling with the field of PDW is possible to realize through the any array spatial harmonic.
Phase constants of spatial harmonics depend on the angular deflection of array α and in the frame X'Y' Z' (Fig.4) look like:
2 2( ) ( ) ( )n m z n ómγ α γ α γ α′ ′= + (10)

405
Phase constant of wave in PDW does not depend on the direction in plane YO , because in this plane the PDW is isotopic one, and always equal to
Zzγ . Meeting the
condition of phase synchronism between the spatial harmonic ( , ) and wave in PDW n m ( )z n mγ γ α= (11)
part of power from the system “PDW-array” through the harmonic ( , m ) inserts again into PDW and is scattered at the angle of to the axis OZ . The dependences (10) and (11) allow to determine the angular position of the Bragg resonance
n)( n
Brδ
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⋅−±=
Uk
mn
mnmnBr χ
αα2
arccos),(0
),( (12)
The propagation direction of the reflected Bragg wave in the plane YO is possible to determine as follows:
),( mnBrδ Z
( , )cos z n mn mBr
z
γδ
γ= . (13)
The experimental investigations had realized for the electrodynamic system, consisted of the PDW and surface waves converter. The PDW was made of Teflon (permittivity ε =2,05). Waveguide thickness is 2 =2 mm, width - 117 mm. Plane phase front was formed by the horn-and-parabolic exciters, located at the input and output of PDW.
a
As surface waves converter were used the two-dimensional periodic arrays, formed by the round openings on the metal disk. Disk diameter Ø =100 mm, opening diameter =2 mm, opening depth =1,2 mm, the openings are filled up with paraffin with
d hε =2,25.
In the Fig.6 are shown the experimental results of normalized dependence of the field value at the output of PDW ( )t tE Eα ° from the angular deflection of array α .
,t xE - copolarization, ,t yE – cross-component. At λ =5,00 mm and =3 mm, =2,3
mm, =1,183, (Fig. 6) it may be clear seen the Bragg resonances ≈46°;
≈59°. The anomalies in the slide points (calculated values of their angular position
are follows: ≈36,3°; ≈85,2°) it is difficult to assign in the Fig. 6.
1l 2l
U )0,1(−Brα
)1,0( −Brα
)0,1(−sα ( 0, 1 )
sα −
Thus, depending on array periods ( and ) and wave length the anomalies in the slide points are accompanied either by increasing or decreasing of the coupling ratio of PDW with array. In both cases, however, occurs the mutual redistribution of power between Е and Н–waves in PDW, e.g., if in the vicinity of the value
1l 2l
( , )n msα ,t xE
increases, so the value ,t yE decreases, and vice versa. It is also typical for Bragg
resonances. In other words, in the vicinity of resonance meaning of α the bypassing on polarization in PDW is differed from the bypassing for nonresonance angular deflection, which according to the Fig.6 is ,t xE / ,t yE ≈15 dB.

406
Fig.6. The normalized dependence of the field value at the output of PDW ( )t tE Eα ° from the angular deflection α of array. ,t xE – copolarization, ,t yE –
cross-component. 183.1;2.0;3.2;3;5 21 ===== phVcmmmmlmmlmm Bλ
Some difference of experimental and calculated values of and is explained by the experimental uncertainty and by that the metal comb into the connection with PDW alternates the phase velocity of the inhomogeneous wave. Simultaneously with the field at the output of PDW the dependence on the angular deflection of the comb
( , )n msα ),( mn
Brα
α scattered field value in far-field region had been investigated. The measurements were realized at the maximum of radiation pattern. For this purpose has been made the device, allowing turning the system “PDW-array” at the tilt angle
rE
n mγ and azimuth n mθ . The receiving horn, waveguide part of which has the rectangular cross section, was adjusted at the maximum signal by turning round its axis. The adjustment need is generated by that in the system “PDW-comb” the cross-component excitation is possible (Fig. 6) and the scattered field in general case has the elliptical polarization with the optional tilt of the polarization ellipse.
The dependence of scattered field value ( )rE α at α≠0° on the scattered field
value at α=0° (Fig.7, array of round openings, copolarization) was investigated in
the experiment. According to the Fig. 7 ≈40°, ≈68° they corresponds to
the angular position of hit at α≈40° and notch at α≈75° in Fig.6. Thus, the angular position of the slide points not always coincides with the angular positions of typical anomalies .
(0)rE)0,1( −
sα )1,0( −sα
0, ( ) /t x t xE α ,E
cKThe scattered field polarization is uniquely determined by the polarization ellipse
parameters: angular deflection of ellipse ψ and ellipticity ratio . eKIt is known (see Fig. 6), that if α =0°, the cross-component almost miss in the
system “PDW-array” ( ,t õE / ,t óE < -15дБ) and the scattered field has to be the linearly
polarized one, that is why as the reference point of angle ψ should be chosen the direction of the polarization vector rE
r at α =0°, which in case of –wave coincides with the
axis (Fig. 4). As for the scattered field registration the horn had been used, which waveguide part has the rectangular cross section, so the angle
E OZ
ψ during the experiment had

407
been determined under the maximum of the scattered signal and corresponded to the angle between the OZ axis and normal to the wide wall of the waveguide part of received horn. The positive values of the angular deflection of polarization ellipse are counted anticlockwise. To increase the accuracy of measurements the angle minψ , at which the minimum of scattered signal is observed, had been determined too. Obviously that
minψ ψ= -90°.
Fig. 7. The dependence of the scattered field value ( )rE α at α ≠0° on the scattered field
value at (0)rE α =0° on the angular deflection α .
183.1;2.0;3.2;3;5 21 ===== phVcmmmmlmmlmm Bλ The measurements results ( )eK α , ( )ψ α for different parameters of
electrodinamic system are shown in the Fig. 8, and Fig. 9. In the vicinity of the resonance values ( )),(),( , mn
Brmn
s ααααα == the angular deflection of polarization ellipse of the scattered field becomes different from nought, despite the isotropic character of the elementary antenna (of round openings), and can reach 30°. Simultaneously the ellipticity ratio increases up to values of 0,3÷0,4. Besides, occurs the hopping of phase difference between the orthogonal components of scattered field.
Fig. 8 The dependence of turning ratio Fig. 9. The dependence of angular of ellipticity on angular deflection α deflection of ellipse eK ψ on angular deflection α
Thus, the described above polarization distortions concern the polarization and phase disturbances of inhomogeneous wave in system “PDW-array” at and ),( mn
sαα =

408
),( mnBrαα = , namely – the bypassing on polarization alternation and the phases difference
alternation between the orthogonal components. As a result of the realized investigations it has been ascertained that the spatial
spectrum at the diffraction of the inhomogeneous wave on the two-dimensional periodic arrays consists of the harmonics of two types: ordinary and combined. Each of these two types can be described, considering the diffraction on correspondence one-dimensional periodic arrays.
The spatial position of the scattered harmonics depends on the array angular deflection α round its axis and is determined by the tilt angle nmϕ and azimuth n mθ .
Altering the angle α it is possible to obtain Bragg resonances and anomalies in the slide points. The limited dimensions of the elementary antenna (of round openings) completely exclude the slot and waveguide resonances, which are typical for one-dimensional periodic combs and concerning the leaky wave feed [8].
Polarization distortions of the scattered field of the two-dimensional periodic system of elementary antennas occur only at the resonance angular deflections α .
Bragg scattering of the order ( ) of the inhomogeneous wave in PDW could led to decreasing of scattered field level.
,n m
In the nonresonance vicinity of angular deflections α polarization and power features of the scattered field depend weakly on α . Prototype of the antenna array and its experimental features.
According to the stated results of the direct and scaling measures the prototype of the AA of 3-cm range with the surface waves with the optional setting of the beam had been developed. The prototype photo is shown in Fig.10. PDW and its exciter equally with the 180° –turning had been made just like they describe above. The exit aperture of the exciter and, accordingly the width of PDW, are 750 mm. The hollow metal waveguide section at the outlet flange is 19×9,5 mm2. The PDW was made on basis of the impactproof polysterene 2 mm thick, located directly on the metal shield. Among the .peculiarities of construction it should be note the method of parabolic cylinder manufacture. It is made of aluminium band 6 mm thick and 9,5 mm width (with periodic recess to decrease the rigidity) by means of just curving at parabolic shape with further screwing to the walls of biplanar metal waveguide.
E
Fig.10. Prototype of AA of 3-cm range
409
The grating is made on aluminium alloy disk 750 mm diameter and 1 mm thick. Elementary antennas look like openings 12 mm diameter. They placed periodically in two mutually perpendicular directions with the periods =18 mm, =20 mm. The distance between metal shield and disk is 17 mm. The accurate keeping of this distance along all the plane could be provide by the space plates of cellular polystyrene (Fig.10) 15 mm thick, placed between the disk and PDW and between the disk and the guard shield. In our case the disk edges fits into the support grooves, fixed with the flanks to the metal shield and to protective coat. To provide the disk planarity it has the stiffeners. Obviously that in case of use of space plates of cellular polystyrene and of thin disk of fiber-glass plastic, having the etched openings in the covering foil there is no need to apply the stiffeners and the construction becomes more manufacturable one.
1l 2l
The disk is fixed in the centre on axis and able to turn in the required angles section. To turn the disk if there is the guard shield the gear quadrant (upper left corner in Fig.10) and pinion with axis, penetrated the guard shield, are used. The disk axis is rigidly fixed to the metal shield, where the PDW is, that leads to some scattering of PDW power, the value of the insertion losses, however, is not significant (less then 0,1 dB).
The spatial features of the developed scanning AA are shown in Fig. 11. Choosing the period =18 mm the scanning angle 1l 1,0ϕ− =30° is provided at α =20° as operating
one. The initial beam deflection from normal to the aperture plane is 25°, exactly at this angle the antenna plane should be turned against the initial horizontal direction to direct it vertically up. The combined harmonic with n = -1, m = -1 occurs at α =27,5°, that allows to realize the one-beam mode in the section of beam setting 1,0ϕ− = ±42°. Choosing the
period =20 mm as operating one, the scanning angle 2l 0, 1ϕ − = 30° is provided at α =22°.
The initial beam deflection from normal to the aperture plane is 16°, it is more preferable with relation to efficient use of aperture square. The losses in aperture square are only 4 %. The combined harmonic with = -1, = -1 occurs at n m α =33°, that allows to realize the one-beam mode in the section of beam setting 0, 1ϕ − =±47°.
Fig.11. Spatial features of the developed scanning AA

410
The experimental data concerning the spatial features of developed AA are good conform with the design ones. The total losses in AA do not exceed the value of 1,2 dB. Among them 0,4 dB correspond to the losses in horn-and-parabolic transition and in 180°
–turning, 0,2 dB – in horn exciter of PDW, 0,2 dB – in PDW on the metal support and 0,4 dB – in the system “PDW-array” due to the incomplete PDW power takeoff by the array. The radiation pattern width of developed AA in plane of is 2,0° at frequency of 11,3 GHz at the level of sidelobes –13 dB. The radiation pattern width in plane of
is 2,5° at the level of sidelobes not higher then –20 dB. The gain of developed AA is equal to 36,6 dB. The beaming polarization is linear, and in scanning sector ±30° the angle of vector orientation does not alter. Thus, the considered AA with surface waves meets many requires to antenna system of space SAR, the most important of which is the problem solving concerning the beam setting in space angle of 60°. It is noted for high manufacturability, low cost and could be widely used in other systems of centimetre range.
E
XOZ
XOY
Er
Peculiarities of centimetre wave range construction by antenna of space SAR system
For SAR of high definition in 3-cm range is needed the aperture of antenna 2х2m2. At cosine amplitude distribution of the field in both planes it has to provide the antenna beam width 1х1° at the level of –3 dB. This problem is solved by simply increasing of antenna aperture, shown in Fig. 10. The antenna electrodynamic circuit, shown in Fig. 1, however, has angular frequency dependence because of power series circuit and at antenna aperture of 2х2 m2 won’t be able to provide the signal band of 200 MHz. To such signal band corresponds the aperture of 0.5 m. Thus, to construct the electrodynamic circuit of space SAR antenna the parallel power circuit of twelve 0.5х0.5 m2 subarrays should be used. These arrays form the needed antenna aperture 2х2 m2.
In the Fig. 12 shown the arrangement of twelve cells, provided the antenna aperture 2х2 m2 and interacted with one common scatter (1- cell No.9, 2- PDW exciter of cell No.9, 3- common periodic scatter). The presence of scatterer common for all subarrays will provide the required antenna beam control at cophased power supply of subarrays.
Fig.12. The arrangement of twelve cells, provided the antenna aperture 2х2 m2

411
The circuit of parallel distribution of SHF power and including of phase shifters into the AA of space SAR (Fig. 13) was chosen grating the providing of the most efficient amplitude-and-phase distribution of the field along all the aperture of AA. The assumption radiation pattern of AA, consisting of twelve subarrays is shown in Fig. 14. The AA radiation pattern width is 1° at level –3 dB. The received antenna radiation pattern deflection from normal, equal to 4.5°, corresponds the relative slowing factor of PDW
=1.2, period =25 mm, operating frequency 9.375 GHz (1). The first sidelobe of radiation pattern is divided in two and is at the level –35 dB, the second sidelobe is at the level -17.7 dB. Such sidelobes action in antenna is specified by AA division into subarrays, by field falling in each of them to the edges for value of –1 dB and by cophase powering of all of twelve subarrays.
U l
Fig.13. The circuit of parallel distribution of SHF power and including of phase shifters into the AA of space SAR
Fig.14. The assumption directional diagram of AA
The chosen electrodynamic circuit of planar AA with potential beam setting in the
space angle ±60°, the made successful antenna prototyping on the 750 mm aperture, the problem solving of antenna broadbandness by means of subarrays and calculated radiation pattern (RP) of AA point to the realizability of required AA of space SAR

412
§2. The multipurpose antenna system of multimode space side looking radar
To provide the high tactical and technical characteristics of multimode side looking radar it should be used the wideband signals, code-phase-shift manipulated (CPM), for example, or frequency-modulated (FM). The needed in considering case wide-band antenna of side looking radar (SLR) has to operate at wave length of 3 cm and meet a series of demands. Among them to provide the transmission and reception of signal spectrum with band not less then 7 MHz with the antenna aperture in the flight direction not less then 15000 mm and the level of sidelobes not worse then –25 dB. The antenna should have the potential of by-turn operation on one of two linear polarizations and their operative alternation. In plane, which is perpendicular to the flight direction it should have the radiation pattern as cosec( )ϕ for all the operating modes on one of two polarizations. It is proposed to use SLR at two altitudes of satellite orbits 600 ± 50 km and 750 ± 50 km with swath of 700 km, and also in synthetic aperture mode with swaths of 100 and 300 km. The initial antenna viewing angle is determined by the operating peculiarities of SLR and is an angle of ≥20°. Structural performance of electrodynamic circuit has to provide the necessary antenna durability in space conditions.
Let us consider some alternative solutions. The linear antenna array, for example, as slotted-guide transmitter [20], with length of 11085 mm, is successfully used during many years in structure of space SLR, operating at the wave length of 3.1 cm. The problem of initial antenna closing and its further opening in orbit had been successfully solved by the authors of this design during construction realization of such distant linear transmitter. But, as it will be shown later, it is impossible to provide the signal spectrum transmittion with band of 7 MHz at this transmitter length. Thereupon the search problem of electrodynamic circuits of wide-band antennas with wide aperture, which constructive applying would allow their delivery and opening onboard satellite, is acute.
The presence of linear transmitters having the different apertures, which electrodynamic circuit is based on the conversion effect of surface waves into space ones [2], allows to solve this problem. For this purpose it is offered to use in focusing mode the linear feed, consisted of dielectric waveguide and grating. The feed lens mode is realized by aperiodic grating. As it shown in [5], the considered electrodynamic circuit of the focusing transmitter, using the conversion effect of surface waves into space ones, allows to solve more difficult problems, concerning the creation of radiation pattern of irregular shape, cosecant one, for example.
The needed electrodynamic circuit of such wide-band antenna, included the focusing feed will be analyzed below and its experimental grounds will be shown. This antenna peculiarity is its performance as parabolic one, as it is used the parabolic cylinder with aperture of 15000 mm with limited length of cylinder part to the field spot size, focused by its linear feed.
The problem of such antenna unfolding on the orbit could be solved easier, because only the parabolic mirror, having the small length of cylinder part, should be unfolded. The linear focusing feed does not exposed to this procedure because of small dimensions and stays constantly connected to the transmitter/receiver. Broadbandness of linear antenna arrays with wide aperture
The used and designed remote sensing systems analysis shows that for the space radars of ERS of and CM - waves length range the linear or planar antenna arrays are mainly used, which are based on the periodic system of slotted-guide radiators. These antennas features are their simplicity in calculation, manufacturing and the presence of perfect systems of orbit unfolding. According to the electrodynamic circuit the slotted-
DM

413
guide antennas belong to the circuit with the serial feed. This circumstance demands the closely consider of the transmittion (receive) process of wide-band signal spectrum by this antenna.
As calculations show, the angular-to-frequency sensitivity of slotted-guide antenna, built on the hollow metal waveguide with section of 23х10 mm2 for frequencies range near =9744 МHz (f λ =3.1 cm), is 0,76° per 1% of frequency variation [21]. So, the transition of impulse signal spectrum components with 7 MHz band will entail the rocking (e.g. spreading of integral radiation pattern) of the antenna beam within the limits of 0,055°. The allowable radiation pattern spreading, in view of processing system, should be not more then 25 %. The even amplitude distribution of the field on the linear array aperture with dimension of =15000 mm, providing the level of the first sidelobe -26,4 dB, makes the width of radiation pattern under the level of half power
L0,52 θ∆ =73,4°× Lλ =0,15°.
This radiation pattern will have the width of 2 rθ∆ =0,106° at the location mode. So, the radiation pattern spreading in this case will be a value of 51,9 % with respect to the beam width 2 rθ∆ =0,106°. For even amplitude distribution like “cos” (the level of the first
sidelobe is –23 dB) this value will be 56,7 % with respect to 2 rθ∆ =0,097° [22]. Thus, the slotted-guide antenna array of 15000 mm length, due to serial power system does not provide the transition to the required spatial point of signal spectrum with 7 MHz width. This disadvantage could be removed by means of considered array dividing into four parts with their further parallel and cophase powering.
Let us consider the time-dynamics of directional characteristics of the mentioned slotted-guide antenna array with 15000 mm aperture during the lengthwise it transition of two next partial counterphase impulses of CPM signal, duration of each is 0,28 mcs. This partial impulse length of CPM signal in free space is 90 m. The scattered field forming the complete path of the partial impulse rise-up portion with group velocity corresponding to
gλ λ =0,743 through the antenna array 15 m length is 20.2 m, e.g. 22,43 % from 90 m. In the Fig. 15a is shown the calculated radiation pattern of the antenna array for even (cophase) cosine amplitude distribution on the 15000 mm aperture. This distribution corresponds to the case, when it is emitted by the array one partial impulse or their continuous sequence, the phase inside of which is constant. If the next partial impulses are antiphase, so from time to time the uneven amplitude distribution like “cos” [20] is occurred on the aperture as the rise-up portion and descending part of these impulses are transitted lengthwise the antenna array. The normalized radiation patterns, shown in Fig. 15b,c,d correspond to this process. The Fig. 15b corresponds to the case, when the second antiphase partial impulse of CPM signal occupies only 1/6 part of the aperture, and the first one – 5/6. The radiation pattern shape, shown in Fig. 15c, corresponds to time slot, when the antiphase partial impulse occupiews 2/6 of antenna aperture. The bidirectional beam in Fig. 15d corresponds to the symmetric uneven field amplitude distribution on the aperture, when the amplitude distribution in the middle of it had changed to the antiphase one.
The further transition of partial impulses portions leads to occurance of the similar amplitude distributions and radiation pattern forming in reverse order. The formed radiation pattern (Fig. 15c,d) point on the one hand, to the power loss of useful signal to 22,43% (signal power attenuation to 1,1 dB), because the part of scatter field in this time interval has another spatial direction. This side emission is in section of angles of 0,07° - 0,4° counting from the middle of the initial radiation pattern. On the other hand, this part of the scatter field forms the higher level of lateral radiation, and it should be considered as the significant hindrance for system operation as a whole. This disadvantage, peculiar to the

414
antenna systems with the serial feed, could not be complete removed, because the antenna division into parts with the serial power circuit just decrease the percentage of signal and hindrance. It should be noted that the radiation pattern shown in Fig. 15a,b,c,d during calculations are normalized to the one level equal to 0 dB. Although it is obviously that the signal power for bidirectional beam (Fig. 15b) nearly coincides with radiation pattern in Fig. 15a in width, but the level of the first sidelobe increased in it from –23 dB to –15 dB. Thus, the time processes consideration in the mentioned antenna array with the serial power points to the need of its division into parts, powered parallel. The amount of the needed parts should be defined under the required correlation signal/noise.
It is known [24], that the creation of the antenna array with the series-parallel power circuit complicates its structural performance, demands the extra amount of waveguide elements, wide-band phase shifters, provided the antenna operation in the wide range of temperatures. Besides, its unfolding in the orbit is complicated.
The listed factors lead, finally, to the poor reliability of locator operation having such antenna. The task of radiation pattern forming like cosec becomes almost unrealizable one. As it will be shown below, to form the sharp slopes of such radiation pattern the aperture in vertical plane not less then 1000 mm is required. For this purpose the linear antenna array 15000 mm length should be located in cylinder lens focus [17] with synthetic profile with 1000х15000 mm aperture or in the focal plane of the specular secondary reflector, having the correspondent profile with the mentioned aperture. Here, the question of polarization routine switching and swaths altering, demanding the secondary radiator changing every time, is still unsolved.
Fig.15. The normalized RP of slotted-guide antenna array with 15000 mm aperture
The made analysis of antenna with the serial power circuit shows that to realize the
required wide-band antenna with the 15000 mm aperture, the parallel powering antenna is need.
With this purpose the theoretic and experimental investigations, concerning the search of optimum solution to create such antenna, had been made. Under the investigations’ results the parabolic secondary radiator with 15000 aperture and switched feeds set (Fig. 16) were assumed as the basis of required antenna electrodynamic circuit.

415
The electrodynamic circuit of SLR wide-band antenna The electrodynamic circuit of SLR wide-band antenna with wide aperture (Fig.16)
includes the phase corrector as parabolic cylinder, which, unlike the segmented parabolic antenna [25], has no near located metal planes, and the feeds unit 2. The feed unit includes three bipolarization feeds 3,4,5, providing the antenna operation in three modes, distinguished with their swath. The feed 3 is meant for SLR mode with swath of 700 km, feed 4 – for synthetic aperture mode with swath of 300 km, feed 5 – for the synthetic aperture mode with swath of 100 km. To activate the required mode and polarization kind there are two switches – feed switch 6 and polarization switch 7.
Fig.16. The antenna electrodynamic circuit
To the basis of the feeds electrodynamic circuit operation is put the scatter field
focusing in all planes, passing through the feed axis, operating at this moment. This solution allowed to leave the circuit of the pillbox antenna with near located metal planes and to provide the operation on two polarizations. The focus distance of each feed was chosen as equal to 5600 mm ( parameter) at the focus distance of the parabolic cylinder
=3750 mm. Thus, there is underfocusing of the wave beam in plane in the area of the parabola top and beam refocusing in plane in the areas near to the edges. It should be especially noted that these effects do not influence absolutely to the forming by the parabolic cylinder of plane phase front in YO plane and of correspondence narrow radiation pattern in the same plane. The flare angle of antenna secondary radiator is 180° and accordingly requires the radiation pattern width from each feed in
2bf XOZ
XOY
Z
ZOY plane 2 ϕ∆ =180° under the level (-10÷-20) dB.
The parameter value was chosen from the condition of minimum width spot obtaining on the parabolic cylinder surface in the plane, which is perpendicular to the flight direction. The mentioned radiation pattern feeds widths were chosen to ease control of geometrical parameters of parabolic cylinder and feeds setting space. The parameter is
2b
1b

416
numerically equal to focus distance of the parabolic cylinder, and the value =7500 mm, e.g. to the half of antenna aperture.
3b
Thus, in the chosen antenna electrodynamic circuit in the plane, which is perpendicular to the flight the scatter field with the convergent phase front is formed by means of feeds, this may be effectively used to obtain the cosecant shape of radiation pattern. In the flight plane the parabolic secondary radiator provides the plane phase front forming. The possible beam overflow over the edges of parabolic cylinder decreases the antenna gain and demands the minimization. The higher level of the rear sidelobes is not so important during the Earth sensing from space.
The choice of this antenna electrodynamic circuit concerns its wide potentials and universality. This circuit does not require the great length of waveguide section, there is no need to open them. If it is necessary, the antenna electrodynamic circuit could be expanded with the feed of other waves’ range, millimetric one, for example. Moreover, the transmitting-receiving module could be inflexibly connected with the feeds by means of short piece of feeder and after mounting on satellite it will remain fixed. The mirror only undergoes the opening process, e.g. those parts of it, which does not contain the elements of SHF units. The main advantage of the chosen antenna electrodynamic circuit is its broadbandness, which removes restrictions to the band of transmitted PMC signal.
With the purpose to identify the needed secondary radiator length and feeds’ length let us consider the antenna operating in each of modes. In the Fig. 17a,b are shown the sensing system swaths (considering the curvature of Earth surface) from the orbits altitudes of 600 km and 750 km respectively and only for the SLR mode, without synthetic modes. This variant is interesting to consider the creation of antenna device, having the optimal dimensions of feed and secondary radiator.
Fig.17. Swaths in SLR mode
Let us consider two cases of earth coverage with swath of 700 km, but with the
angular openings of 16° and 20.2°. The first variant provides the swath of 700 km, starting from the angle of sight 45° from orbit altitude of 600 km and from angle of sight 41° from orbit altitude 750 km. The required for this case secondary radiator length and feed length (Fig. 18), from the laws of geometric optics, are equal to 530 mm and 1600 mm respectively.

417
Fig.18. Feeds’ fields focusing circuit to the parabolic cylinder
secondary radiator in SLR modes The second variant provides the same swath starting from the angle of sight 38,9°
from orbit altitude 600 km and from the angle of sight 34,8° from orbit altitude 750 km. The required in this case parabolic cylinder secondary radiator length from the laws of geometric optics, are equal to 680 mm, and the focused feed length is 2000 mm. The diffraction divergency of field, fell to the secondary radiator, in these cases will be minimal, and its exact value will be shown below, during the experimental grounds of antenna parameters.
Along with scatter field focusing, the feed should have the cosecant radiation pattern in plane, which is perpendicular to flight. All these needed parameters are provided by choice of correspondent amplitude and phase distribution on the feed aperture. Here the phase distribution is responsible for the needed curvature of the converging phase front, and the correspondent amplitude distribution forms the cosecant radiation pattern. The required scatter field focusing can be realized either by the long-focal-length dielectric lens [17] or by the correspondence choice of periods’ values of periodic scatters, forming the feed [5,26,27].
The calculated values of antenna gains (G ) [28] for two variants of SLR mode are the following values:
Orbit altitude of 600 km, (Fig. 17a): a) onset of swath (angle of sight 45°) =40,35 dB; swath middle =42 dB;
swath end (angle of sight 61°) =43,65 dB; G G
Gb) onset of swath (angle of sight 38.9°) =39,2 dB; swath middle G =41 dB;
swath end (angle of sight 59.1°) G =42,8 dB. G
Orbit altitude of 750 km, (Fig. 17b): a) onset of swath (angle of sight 41° ) =40,6 dB; swath middle G =42 dB;
swath end (angle of sight 57°) =43,4 dB; G
Gb) onset of swath (angle of sight 34.8°) =39,45 dB; swath middle G =41 dB;
swath end (angle of sight 55°) =42,55 dB. G
GThe needed increasing of gain from the beginning to the end of the swath is
realized by the cosecant radiation pattern and for the flare angle of 16° is 3,3 dB и 2,8 dB for orbits of 600 km and 750 km respectively. For the flare angle of 20.2° the increasing of coefficient of amplification is 3,6 dB and 3,1 dB.

418
In the Fig. 19a,b are shown the sensing system swaths from the orbits of 600 km and 750 km for all three operating modes. For the orbit of 600 km the swath start begins with the angle of sight of 30°, and for the orbit of 750 km all the swaths begin with the angle of sight of 25°. These angles of sight provide the swaths equality from the orbits of different altitudes. It follows from Fig.19a that the synthetic mode with swath of 100 km is provided by the angular flare of 6.2°, the synthetic mode with swath of 300 km - angular flare of 16°, and the SLR mode with swath of 700 km requires the angular flare of 27°. The difference of this SLR mode from the considered in Fig. 17, 18 is in the need to combine the system operation onto one antenna with the significant decreasing of the initial angle of sight, concerning the synthetic aperture radar operation conditions.
The focused beam path from feeds to secondary radiator for all of three modes and the needed beams’ length and secondary radiator length are shown in Fig. 20. Here, in SLR mode, due to the angle of sight decreasing, the feed length should be increased to 2700 mm and the parabolic reflector secondary radiator length should e increased to 910 mm. The focused feeds lengths for the synthetic modes with swaths of 100 km and 300 km are equal to 630 mm and 1600 mm respectively. Here within the geometric optics both theses modes need no length increasing of the cylindrical part of the antenna secondary radiator. As the mentioned calculations show, the initial angles of sight of 30° and 25° provide the antenna operation in any of mentioned orbits.
The cosecant radiation pattern shapes for each of operating modes and for each of orbit altitude are shown in Fig. 21.
The calculation values of antenna power gains for two orbits and three sight modes of cosecant RP are shown below. Orbit altitude of 600 km. a) synthetic mode with swath of 100 km: at the swath start (angle of sight 30°) =45,7 dB; in the swath middle =46 dB; at the swath end (angle of sight 36.2°) =46,3 dB;
GG G
b) synthetic mode with swath of 300 km: at the swath start (angle of sight 30°) =41,05 dB; in the swath middle =42 dB; at the swath end (angle of sight 41.6°) =42,95 dB;
GG G
c) SLR mode with swath of 700 km: at the swath start (angle of sight 30°) =37,8 dB; in the swath middle G =38 dB; at the swath end (angle of sight 57°) =41,8 dB.
GG
Orbit altitude of 750 km. a) synthetic mode with swath of 100 km: swath start (angle of sight 25°) G =45.75 dB; the swath middle G =46 dB; the swath end (angle of sight 31.2°) =46,25 dB; Gb) synthetic mode with swath of 300 km: swath start (angle of sight 25°) =41,2 dB; the swath middle =42 dB; the swath end (angle of sight 41°) =42,8 dB;
GG G
c) SLR mode with swath of 700 km: swath start (angle of sight 25°) =38,1 дБ; the swath middle =39,8 dB, the swath end (angle of sight 52°) =41,5 dB.
GG G
The gain increasing from the swath start to its end in SLR mode is 4 dB and 3,4 dB for the orbits’ altitudes 600 km and 750 km respectively.

419
Fig.19. The swaths in three modes variant of looking system
Fig. 20. Focusing schedule of feeds’ field to the parabolic cylinder secondary radiator in three modes variant of looking system
Fig.21. Cosecant RP

420
Experimental grounds and SLR wide-band antenna prototyping in millimetric wave range
To ground the chosen antenna variant it had been applied the experimental prototyping in millimetric wave range at a frequency of 69,8 GHz. At this stage the main part of attention was paid to confirm the principal possibility to focus the scatter field in the nearest area, to determine the needed lengths of feeds and parabolic reflector secondary radiator length, considering the diffraction effects.
The experimental setting schedule is shown in Fig. 22. Here 1 – mm range generator with horn-lens antenna, 2 – dielectric lens, 3 – aperture of absorber material, 4 – recording/receiving device with stops located turn be turn at the distances of which are equivalent to the corresponded part of parabolic cylinder surface with aperture of 15000 mm, 5 – recording/receiving device with horn-lens antenna located in the far area to take the radiation pattern received as the result of beam various focusing at the lens output 2.
1, 2, 3,b b b
Fig. 22. The experimental setting schedule.
From the electrodynamic point of view the most interesting the potential studying
of focusing by the shortest beam, because it forms the diffraction field of the biggest width in the long-focal-length lens mode. This field along with the first and the second diffraction lobes (sequence level – 20 dB) has to be intercepted by the parabolic reflector secondary radiator. The window in stop 3 prototypes the feed 630 mm length. In the initial condition the horn-lens antenna 1 housed in lens focus 2 (size (а) is equal to lens distance 2) and at the output of stop 3 was formed the field with plane phase front. The radiation pattern in Fig. 23, made by registrar in the far area, corresponds to this field. This radiation pattern sidelobes level and its width correspond to the distribution on the aperture, which is near to cosine. The relative slope steepness of this radiation pattern at the level -1 dB with regard to level –3 dB is 32 2dB dB1ϕ ϕ−∆ ∆ − =1,62. This value was accepted to evaluate the slope steepness of the obtained radiation pattern as the result of feed field focusing, which distinguished by the width. On the other hand, the radiation pattern obtaining with high steepness of slopes is needed to form the radiation pattern of cosecant shape with high coefficient of amplification and efficiency.
In Fig. 22 the size (a) increasing, corresponding to the feed carryover from lens 2 focus, leads to forming of the field with the convergent phase front at the lens aperture output. Thus, there is an opportunity to realize the various degree of scatter field focusing, to register field spots at the distances corresponding to the location of 1, 2, 3,b b b

421
conforming surfaces of parabolic cylinder and to determine the radiation pattern shapes, slopes steepness, which are formed at the chosen value of size (a).
Fig.23. Radiation pattern of cophased flare.
In Figs. 24, 25 and 26 are shown the taken in MM - range field images for the
fixed distances recalculated into sizes of CM - range 1, 2, 3,b b b The radiation patterns, which is corresponded to these fields’ distributions are shown
in Figs. 27, 28, 29. These fields’ distributions and their radiation patterns are distinguished with that they were taken at the various degree of focusing, e.g. as the size (a) increases. As it follows from the Fig. 24, the best field focusing is at the distance. The obtained radiation pattern (Fig. 27) for this case has the width, equal to 6,3°, needed to realize the location mode (level 1,5 dB), which is near to the required width of 6,2°. The relative slopes’ steepness of this radiation pattern
1b
3 12 2dB dBϕ ϕ− −∆ ∆ =1,4 and more higher then in case of radiation pattern in Fig. 23. The required parabolic cylinder secondary radiator length will be 1100 mm. This secondary radiator length provides the interception of feed field by the central part of the parabolic cylinder at the level of -25 dB, at the level of ∼-23 dB – by the middle part and at the level of –9 dB – by the secondary radiator edges. To the efficiency of b3 curve corresponds 95 %. The total efficiency of such secondary radiator is near to 98%, that corresponds to the signal decreasing in 0,1 dB.
Fig.24. Fields’ distribution at focusing
Fig.25. Fields’ distribution at focusing
Fig.26. Fields’ distribution at focusing

422
The further carryover of lens feed 2 (increasing of size (a)) leads to greater beam focusing. That indicates the radiation pattern width increasing to 7,6° (Fig. 29), the increasing of relative slopes’ steepness of this RP 32 2dB dB1ϕ ϕ− −∆ ∆ = 1.17. It is obviously from the Figs. 25, 26, that the required length of the parabolic cylinder secondary radiator should be increased to obtain the same efficiency (Fig. 26). The further increasing of distance (a) leads to occurring of the null in plane part of radiation pattern.
Fig.27. Focused aperture RP
Fig.29. Focused aperture RP
Fig.28. Focused aperture RP
The consideration of radiation patterns (Figs. 27, 28, 29) is shown the principal
opportunity to obtain the radiation patterns with high slopes steepness, which is needed to form radiation pattern of cosecant shape and, in case of synthetic mode with narrow swath, it is enough to provide the small drop of plane part of radiation pattern to -0,5 dB. The obtained increasing of radiation pattern widths, however, and their slopes steepness is not a result of focusing carry from the distance to required distance (Fig. 20). 1b 2b
Based on that the further increasing of distance (a) leads to null occurrence in plane part of radiation pattern and to the significant expansion of the field spot, especially at the level , the conclusion can be made that the required feed length (flare width of stop 3) is not enough to obtain the field focusing at the distance . The fields’ distribution, observed in experiment, (Figs. 25, 26) corresponds to the case of refocusing. Thus, to obtain the high slopes’ steepness of radiation pattern and to carry the point of the greatest focusing on the distance , that will lead to levelling of spots size at levels ,
, (Figs. 25, 26, 27) and to decreasing of secondary radiator length, the initial feed length, equal to 630 mm, should be increased in 30%.
3b2b
2b 1b2b 3b
The focused radiation pattern slopes irregularity (presence of modulation) concerns the presence of the direct extra signal of the low level, scattered from the stop 3 edges, which at real synthesis and experimental refine of focused feed will be missed.
Thus, the made experimental prototyping of focused feed 630 mm length shows that for the synthetic mode with swath of 100 km the required length of the parabolic cylinder secondary radiator should be not less then 1100 mm.
The evaluation of field spots’ size in the point of focusing (Fig. 20) for the focused feeds of SLR modes and synthesis with swath of 300 km at this project stage had been carried out by means of calculation, using the principle of mutuality and phase conjugation of these feeds fields. This was possible due to their enough length [29]. For feeds 2700mm length the field spot on the secondary radiator in point is 190 mm under
2b
2b

423
the level –20 db, and for the feed 1600 mm length – 320 mm. The field spot spreading in comparison with the case of geometric optics in the first case is ±95 mm, in the second one ±160 mm. Thus, the required length of the secondary radiator in SLR mode is 910 mm + 190 mm = 1100 mm, and in the synthesis mode with swath 300 km − 545 mm + 320 mm = 865 mm. The required lengths of secondary radiator for SLR modes (Fig. 18), including the diffraction expansion of the field spot in the focusing point are 930 mm and 830 mm. All these secondary radiator dimensions are obtained for the equally-spaced location of the feeds with reference to its middle. In case, shown in Fig. 20, when with the swath start of SLR mode are combined swaths of other modes, the obtained length of the parabolic cylinder secondary radiation of 1100 mm is not enough in its central part (size under ) and on the secondary radiator edge (size under ). The required lengthening of the secondary radiator in point b1, as may be seen from Fig. 20, is the value about 500 mm to the one direction with reference to the middle of section 6.2° and in 500 mm in point , but to the opposite direction, e.g. the combination of swaths starts demands the asymmetric secondary radiator of reflector. The advisability of swaths start combination may be grounded only if there is the lengthening of the secondary radiator in the central part and providing the high antenna efficiency and keeping of initial length of the secondary radiator in the area of points and .
2b
1b3b
3b
2b 3bThe random deflections of the secondary radiator profile from the calculated value
lead to phase errors on aperture and, as the result, to coefficient of amplification decreasing. The evaluation of the extra losses, made according to [30] gives the following values: (-0.5 dB) at 2 mm; (-0.2 dB) at 1,26 mm and (-0.1 dB) at 0,6 mm.
The possibility of feed creation, operating with the same efficiency on any of polarizations and providing the radiation pattern width under the level (-10 ÷ -20) dB equal to 180°, had been investigated in cm range, in frequencies band 11.2÷11.5 GHz. The developed electrodynamic schedule of the feed is a linear array, consisted of the set of periodic scatters [2]. To excite each of linear polarizations it was used the waveguide switch of polarizations, connected with the hollow metal waveguide of rectangular cross section. The losses in the applied variant of switch were not more then 0,1 dB. If the feed length is 600 mm, the power takeoff was not more then 20 dB. The obtained radiation pattern in plane, which is perpendicular to the feed axis, on each of polarizations are shown in Fig. 30a,b.
Fig.30. Radiation patterns of bipolarized feed

424
The made experimental grounds and prototyping in millimetre wave range of the electrodynamic schedule of the SLR wide-band antenna, based on the parabolic cylinder and focused linear feed, had shown its complete realizability in CM - range of wave lengths.

425 References to the Appendix2
1. Evdokimov A.P., Kryzhanovsky V.V. New way in array antenna engineering // Izv.
vuzov. Radioelectronics.-1996.-Vol.39, № 9-10. P.54-61 (in Russian). 2. Shestopalov V.P. Diffraction electronics. - Kharkov: Publishing house "Vyshcha
shkola", 1976. – 232p. (in Russian). 3. Evdokimov A.P., Kryzhanovsky V.V. Diffraction phenomenon's in antennas by using
the leaky waves // IPRZh, "Antennas". -2003. -№3-4. P.70-71 (in Russian). 4. Evdokimov A.P., Kryzhanovsky V.V. Parameter optimization of system dielectric
waveguide – array at the scanning antenna of an automotive radar // Radiophysica i electronica. -2002. -Vol.7, N3.-P.555-560 (in Russian).
5. Evdokimov A.P., Kryzhanovsky V.V. Flat array antennas with cosecant directional pattern at Ka-band // IPRZh, "Electromagnitniye volny i electronniye sistemy". -2003.-Vol.8, N10. P.52-58 (in Russian).
6. Shestopalov V.P. Physical of a basis of millimetric and submillimetric technique. - Kiev: Publishing house "Naukova dumka", 1985. - Vol. 1. – 213p. (in Russian).
7. Evdokimov A.P. Transformation of inhomogeneous surface waves by using the chamfered screens // Reports of the AS of the USSR. -1984. series A, № 3, P. 48-52 (in Russian).
8. Evdokimov A.P. Resonant of the phenomenon under surface waves scattering by the chamfered screens // Reports of the AS of the USSR.-1985. series A, № 10.-P.48-51 (in Russian).
9. Evdokimov A.P., Sergiyenko I.A. Surface wave scattering two-dimensional periodic structures: Preprint / АS of the UkrSSR. Institute Radiophysics and Electronics; № 90 - 10. - Kharkov: 1990. – 25 p. (in Russian).
10. Evdokimov A.P., Kryzhanovskij V.V., Provalov S.A. The current state of a problem scanning by antenna beam of radiometric complexes at Ka-band range// Radiophysical methods and facilities for research of an environment at Ka-band range. - Kiev: Publishing house "Naukova dumka". -1988. - P. 160-166 (in Russian).
11. Shestopalov V.P., Litvinenko L.N., Masalov S.A., Sologub V.G. Diffraction of waves by grating. - Kharkov: Pablished by KhSU, 1973. – 288 p. (in Russian).
12. Vzyatyshev V.F. Dielectricwave guides. - Moscow: Publishing house "Sevetskoye Radio", 1970. – 215 p. (in Russian).
13. Nefedov Ye.I., Fialkovsky A.T. Transfer strip line. - Moscow: Publishing house "Nauka", 1974. – 128 p. (in Russian).
14. Integrated optics / Edited by T. Tamira. - Moscow: Publishing house "Mir", 1978. -344 p. (in Russian).
15. Landsberg G.S. Optics. - Moscow: Publishing house "Nauka", 1976. – 928 p. (in Russian).
16.. Belyayev V.G, Evdokimov A.P., Kryzhanovskij V.V., Provalov S.А. On question the excitation of a planar dielectric wave guide // Distribution and diffraction of radiowaves to millimetric and submillimetric ranges. - Kiev: Publishing house "Naukova dumka".-1984.-P. 198-203 (in Russian).
17. Zhuk М.S., Molochkov Yu.B. Designing of wide-range scanning, lens antennas and feeder devices. - Мoscow: Publishing house "Energiya", 1973. – 439 p. (in Russian).
18. Shestopalov V.P., Kirilenko A.A., Rud L.A. Resonance scattering of waves. Vol.2. Wave guide heterogeneity. - Kiev: Publishing house "Naukova dumka", 1986. –216 p. (in Russian).
19. Hаnsperdjer R. Integrated optics. The theory and technology. - Moscow: Publishing house "Mir", 1985. – 379 p. (in Russian).

426 20. Remote sensing of the Earth from space / Under ред. L.M.Mitnika and S.V.Viktorova. -
Leningrad: Publishing house "Hydrometeoizdat", 1990. -200 p. (in Russian). 21. Antennas and microwave devices / Edited by D.I. Voskresenskij. -Мoscow: Publishing
house "Sevetskoye Radio", 1972.-318 p. (in Russian). 22. Barton D.K., Wаrd H.R. Handbook of radar measurement: Translation from English -
Moscow: Publishing house "Sevetskoye Radio", 1976.-392 p. (in Russian). 23. Yampolsky V.G., Frolov O.P. Antennas and electromagnetic compatibility. Moscow:
Publishing house"Radio i svyaz", 1983.-272 p. (in Russian). 24. Radar handbook. Vol.2./Editor-in-chief M.I. Skolnik: Translation from English -
Moscow: Publishing house "Sevetskoye Radio", 1977. – 406 p. (in Russian). 25. Drabkin A.L., Zuzenko V.L., Kislov A.G. Antenna-feeder devices. - Moscow:
Publishing house "Sevetskoye Radio", 1974. - 536 p. (in Russian). 26. Ka-band antenna: Inventors certificate 1272935 USSR, ICI H01Q 3/14/ S.D. Andrenko,
A.P. Evdokimov, V.V. Kryzhanovsky, etc. (USSR). - №3339965; It is declared 14.06.84; Published 22.07.86. (in Russian).
27. K.Wolter. Running wave antennas: Translation from English. - Moscow: Publishing house "Energiya", 1970.-448 p. (in Russian).
28. A.P. Dorohov. Calculation and designing of antenna-feeder devices.-Kharkov: Edited by KhSU, 1960. - 450 p. (in Russian).
29. R.Kyun. Microwave antennas: Translation from German. Leningrad: Publishing house "Sudostroyeniye", 1967.-518 p. (in Russian).
30. A.P. Pokras, A.M. Somov, G.G. Tsurikov. Onground station antennas for satellite communication. - Moscow: Publishing house "Radio i svyaz", 1985. - 287 p. (in Russian).

Наукове видання
Національна академія наук України
Національне космічна агенція України Центр радіофізичного зондування Землі
ім. А.І. Калмикова
Радиолокаціонні методи та засоби оперативного дистанційного зондування Землі
з аерокосмічних носіїв за ред. С.М. Конюхова, В.І. Драновського, В.М. Цимбала
(Англійською мовою. Перекладач: Сорока В.І.)
Підписано до друку 06.09.2010 р. Формат 70х100/16.
Папір офсетний. Гарнітура Times . Ум. друк. арк. 34,8. Обл-вид. арк. 30,3.
Тираж 100 прим. Зам. 10-0609. Друк цифровий.
Видавництво та друк ФО-П Шейніна О.В.
61001, Україна, м. Харків, пр. Гагаріна, 1 тел. +38 (057) 732-36-98, +38 (067) 962-28-68
E-mail: [email protected] http://www.izdatel.com.ua
Свідоцтво про внесення суб’єкта видавничої справи
до Державного реєстру видавців, виготовників і розповсюджувачів видавничої продукції
ДК № 2779 від 28.02.2007 р.
ISBN 978-966-1536-57-8
9 7 8 9 6 6 1 5 3 6 5 7 8