kemampuan untuk menyerupai binatang seperti serangga atau … · .Gaya-gaya yang bekerja pada...
8
Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI−ITS. PERANCANGAN DAN IMPLEMENTASI KONTROLER PID UNTUK KESTABILAN GERAK LATERAL DAN LONGITUDINAL UNMANNED AERIAL VEHICLES (UAV) Andi Aris Rinaldi M −2207100049 e-mail: [email protected] Jurusan Teknik Elektro, FTI – Institut Teknologi Sepuluh Nopember Kampus ITS, Keputih-Sukolilo, Surabaya-60111 Abstrak - Pengendalian pesawat udara penting untuk dilakukan, karena pesawat udara harus mampu menstabilkan diri apabila terjadi gangguan. Proses pengendalian selain bertujuan mengatur sikap dan gerak pesawat, juga diharapkan dapat meningkatkan performansi terbang. Dinamika dan kinematika gerak pada UAV, khususnya pada gerak lateral dan longitudinal. Pada gerak lateral terdapat dua kontrol defleksi yang berpengaruh pada respon gerak pesawat yaitu aileron untuk mengatur sudut roll dan rudder untuk mengatur sudut yaw, sedangkan pada gerak longitudinal hanya terdapat satu kontrol yang berpengaruh pada respon gerak pesawat yaitu elevator untuk mengatur sudut pitch. Kontroler PID bekerja pada sistem loop tertutup, di mana umpan balik yang berupa kesalahan diterima oleh kontroler. Dengan algoritma PID, kesalahan tersebut dipakai untuk mendapatkan sinyal kontroler (Manipulative Variable) guna mengkompensasi kesalahan. Dengan mengimplementasikan metode kontrol tersebut pada Unmanned Aerial Vehicle (UAV) saat melakukan gerak lateral dan longitudinal, diharapkan sudut kontrol lateral dan longitudinal dari gerak UAV tersebut akan stabil dengan ataupun tanpa disturbance. Kata Kunci: UAV (Unmanned Aerial Vehicle), Gerak Lateral, Gerak Longitudinal, Kontroler PID. 1. PENDAHULUAN Pada beberapa tahun terakhir, dunia penerbangan telah mengalami perkembangan yang sangat cepat. Banyak sekali penemuan-penemuan serta perkembangan yang terjadi di dalamnya. Salah satunya adalah dibuatnya kendaraan udara tak berawak. Kendaraan udara jenis inilah yang biasa disebut sebagai UAV (Unmanned Aerial Vehicle). Penggunaan UAV saat ini sangat dibutuhkan baik untuk keperluan militer maupun sipil misalnya untuk pencarian dan penyelamatan korban bencana alam serta penginderaan jarak jauh seperti monitoring hutan, monitoring lalu lintas dan keperluan monitoring daerah perbatasan. UAV dapat digunakan untuk pekerjaan yang berbahaya sekalipun seperti memata-matai musuh pada saat perang atau menjangkau daerah yang cukup berbahaya untuk misi penyelamatan. Karena ukurannya yang mini dan tidak mengeluarkan suara bising layaknya kendaraan udara lain seperti pesawat, UAV dapat terbang menyatu dengan langit dan sulit untuk diketahui oleh manusia. Walaupun terbang dalam ketinggian yang rendah kemampuan untuk menyerupai binatang seperti serangga atau burung membuatnya sulit untuk diketahui. Oleh karena itu penggunaan UAV lebih banyak digunakan oleh departemen pertahanan dalam melakukan pengawasan wilayah. Namun karena secara penuh dikontrol oleh pilot yang berada jauh dari pesawat, seringkali menjadikannya tidak stabil sehingga rawan mengalami kecelakaan terbang. Stabilitas adalah masalah yang akan dibahas dan diselesaikan dalam Tugas Akhir ini. Sebuah pesawat harus stabil artinya tahan dari gangguan luar dan dapat kembali ke posisi yang diharapkan. Untuk itu diperlukan sebuah kontroler. Stabilitas dan kontrol merupakan masalah utama dalam membuat UAV dengan sistem navigasi otomatis. Masalah stabilisasi pada pesawat dapat diatasi dengan penggunaan kontroler PID (Proportional, Integral, Derivative) secara terintegrasi di dalamnya. Pemilihan kontroler PID pada penelitian ini karena kontroler ini merupakan jenis kontroler yang paling banyak penggunaannya. Selain sederhana, mudah dipelajari, dan mudah diaplikasikan, sistem kontrol ini merupakan gabungan dari beberapa tipe kontroler yaitu proportional, derivative, dan integral sehingga dapat menggabungkan keunggulan masing-masing tipe kontroler. Selain itu kontroler PID tidak memerlukan memori pemrosesan yang cukup besar. Karena manfaat dari UAV yang begitu banyak menjadikan penelitian ini sangat penting untuk dilaksanakan ini. 2. DASAR TEORI 2.1 Sistem Gerak Pesawat Setiap benda yang ada di permukaan bumi ini yang bobotnya lebih berat dari udara (heavier than air) pasti akan jatuh ke permukaan bumi karena fenomena ini tunduk pada hukum gravitasi (G). Untuk mempertahankan agar benda tetap berada pada tempatnya dan tidak jatuh ke bumi, maka dibutuhkan gaya (Force) sebesar gaya gravitasi (G-Force) yang timbul terhadap benda itu, yang dalam sehari-hari disebut bobot (Weight). Hal ini berlaku pula pada sebuah pesawat terbang sebagai benda yang lebih berat dari udara .Gaya-gaya yang bekerja pada sebuah pesawat terbang terdiri dari, gaya dorong (Thrust) yang mendorong pesawat ke depan, gaya hambat (Drag) yang arahnya ke belakang pesawat, berlawanan dengan gaya dorong, gaya angkat (Lift) yang mengangkat pesawat ke atas, dan gaya gravitasi yang
Transcript of kemampuan untuk menyerupai binatang seperti serangga atau … · .Gaya-gaya yang bekerja pada...

Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI−ITS.
PERANCANGAN DAN IMPLEMENTASI KONTROLER PID UNTUK KESTABILAN GERAK LATERAL DAN LONGITUDINAL
UNMANNED AERIAL VEHICLES (UAV)
Andi Aris Rinaldi M −2207100049 e-mail: [email protected]
Jurusan Teknik Elektro, FTI – Institut Teknologi Sepuluh Nopember Kampus ITS, Keputih-Sukolilo, Surabaya-60111
Abstrak - Pengendalian pesawat udara penting untuk dilakukan, karena pesawat udara harus mampu menstabilkan diri apabila terjadi gangguan. Proses pengendalian selain bertujuan mengatur sikap dan gerak pesawat, juga diharapkan dapat meningkatkan performansi terbang. Dinamika dan kinematika gerak pada UAV, khususnya pada gerak lateral dan longitudinal. Pada gerak lateral terdapat dua kontrol defleksi yang berpengaruh pada respon gerak pesawat yaitu aileron untuk mengatur sudut roll dan rudder untuk mengatur sudut yaw, sedangkan pada gerak longitudinal hanya terdapat satu kontrol yang berpengaruh pada respon gerak pesawat yaitu elevator untuk mengatur sudut pitch.
Kontroler PID bekerja pada sistem loop tertutup, di mana umpan balik yang berupa kesalahan diterima oleh kontroler. Dengan algoritma PID, kesalahan tersebut dipakai untuk mendapatkan sinyal kontroler (Manipulative Variable) guna mengkompensasi kesalahan. Dengan mengimplementasikan metode kontrol tersebut pada Unmanned Aerial Vehicle (UAV) saat melakukan gerak lateral dan longitudinal, diharapkan sudut kontrol lateral dan longitudinal dari gerak UAV tersebut akan stabil dengan ataupun tanpa disturbance.
Kata Kunci: UAV (Unmanned Aerial Vehicle), Gerak Lateral, Gerak Longitudinal, Kontroler PID.
1. PENDAHULUAN
Pada beberapa tahun terakhir, dunia penerbangan telah mengalami perkembangan yang sangat cepat. Banyak sekali penemuan-penemuan serta perkembangan yang terjadi di dalamnya. Salah satunya adalah dibuatnya kendaraan udara tak berawak. Kendaraan udara jenis inilah yang biasa disebut sebagai UAV (Unmanned Aerial Vehicle). Penggunaan UAV saat ini sangat dibutuhkan baik untuk keperluan militer maupun sipil misalnya untuk pencarian dan penyelamatan korban bencana alam serta penginderaan jarak jauh seperti monitoring hutan, monitoring lalu lintas dan keperluan monitoring daerah perbatasan. UAV dapat digunakan untuk pekerjaan yang berbahaya sekalipun seperti memata-matai musuh pada saat perang atau menjangkau daerah yang cukup berbahaya untuk misi penyelamatan. Karena ukurannya yang mini dan tidak mengeluarkan suara bising layaknya kendaraan udara lain seperti pesawat, UAV dapat terbang menyatu dengan langit dan sulit untuk diketahui oleh manusia. Walaupun terbang dalam ketinggian yang rendah
kemampuan untuk menyerupai binatang seperti serangga atau burung membuatnya sulit untuk diketahui. Oleh karena itu penggunaan UAV lebih banyak digunakan oleh departemen pertahanan dalam melakukan pengawasan wilayah. Namun karena secara penuh dikontrol oleh pilot yang berada jauh dari pesawat, seringkali menjadikannya tidak stabil sehingga rawan mengalami kecelakaan terbang.
Stabilitas adalah masalah yang akan dibahas dan diselesaikan dalam Tugas Akhir ini. Sebuah pesawat harus stabil artinya tahan dari gangguan luar dan dapat kembali ke posisi yang diharapkan. Untuk itu diperlukan sebuah kontroler. Stabilitas dan kontrol merupakan masalah utama dalam membuat UAV dengan sistem navigasi otomatis.
Masalah stabilisasi pada pesawat dapat diatasi dengan penggunaan kontroler PID (Proportional, Integral, Derivative) secara terintegrasi di dalamnya. Pemilihan kontroler PID pada penelitian ini karena kontroler ini merupakan jenis kontroler yang paling banyak penggunaannya. Selain sederhana, mudah dipelajari, dan mudah diaplikasikan, sistem kontrol ini merupakan gabungan dari beberapa tipe kontroler yaitu proportional, derivative, dan integral sehingga dapat menggabungkan keunggulan masing-masing tipe kontroler. Selain itu kontroler PID tidak memerlukan memori pemrosesan yang cukup besar. Karena manfaat dari UAV yang begitu banyak menjadikan penelitian ini sangat penting untuk dilaksanakan ini.
2. DASAR TEORI
2.1 Sistem Gerak Pesawat
Setiap benda yang ada di permukaan bumi ini yang bobotnya lebih berat dari udara (heavier than air) pasti akan jatuh ke permukaan bumi karena fenomena ini tunduk pada hukum gravitasi (G). Untuk mempertahankan agar benda tetap berada pada tempatnya dan tidak jatuh ke bumi, maka dibutuhkan gaya (Force) sebesar gaya gravitasi (G-Force) yang timbul terhadap benda itu, yang dalam sehari-hari disebut bobot (Weight). Hal ini berlaku pula pada sebuah pesawat terbang sebagai benda yang lebih berat dari udara
.Gaya-gaya yang bekerja pada sebuah pesawat terbang terdiri dari, gaya dorong (Thrust) yang mendorong pesawat ke depan, gaya hambat (Drag) yang arahnya ke belakang pesawat, berlawanan dengan gaya dorong, gaya angkat (Lift) yang mengangkat pesawat ke atas, dan gaya gravitasi yang

Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI−ITS.
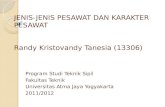
bekerja pada pesawat sehingga menimbulkan bobot (Weight) yang arahnya selalu ke bawah, ke pusat bumi.
Gambar 1 Sistem sumbu badan pesawat terbang
Berdasarkan sifat gerakan pesawat terbang, dinamika
pesawat terbang dikelompokkan menjadi dua model dinamik yaitu dinamika lateral dan dinamika longitudinal. • Dinamika lateral, adalah model matematika yang
menggambarkan dinamika gerakan pesawat terbang untuk gerakan mendatar yang meliputi gerakan berbelok. Pada gerak lateral hanya dua kontrol defleksi yang berpengaruh pada respon gerak pesawat yaitu aileron dan rudder.
• Dinamika longitudinal, adalah model matematika yang menggambarkan dinamika gerakan pesawat terbang untuk gerakan dalam arah vertikal misalnya gerakan mendaki atau menukik. Pada gerak longitudinal hanya satu kontrol defleksi yang berpengaruh pada respon gerak pesawat yaitu elevator.
2.2 Decoupling Sistem MIMO Pada sebuah plant, sering terjadi interaksi antara
variable input-output. Perubahan suatu input kadang tidak hanya berpengaruh pada satu output saja, melainkan bisa berpengaruh pada output lain. Penggambaran sistem ini dapat dilihat pada Gambar 2.
G11
G12
G21
G22
L
V
Yd
Xb
Gambar 2 Plant MIMO
Hubungan suatu input berpengaruh pada output loop yang lain. Penulisan model untuk gambar diatas adalah
Loop 1 :Yd= G11 L + G12 V (2.1)
Loop 2 :Xb= G21 L + G22 V (2.2)
Untuk mengurangi interaksi control loop maka dapat ditambahkan decoupler pada konfigurasi multiloop
konvensional. Sistem kendali decoupling memberikan dua keuntungan : • Interaksi control loop input lain dihilangkan sehingga
stabilitas system close loop system ditentukan oleh stabilitas karakteristik feedback close loop secara individu.
• Perubahan set point pada satu peubah terkendali tidak mempengaruhi peubah-peubah terkendali yang lain
2.3 Kontroler PID Setiap kekurangan dan kelebihan dari masing-masing
kontroler Proporsional, Integral dan Diferensial dapat saling menutupi dengan menggabungkan ketiganya secara parallel menjadi kontroler proporsional plus integral plus diferensial (kontroler PID). Elemen- elemen kontroler P,I dan D masing-masing secara keseluruhan bertujuan untuk mempercepat reaksi sebuah sistem, menghilangkan offset dan menghasilkan perubahan awal besar. Gambar 2.8 menunjukkan diagram blok kontroler PID.
Gambar 3 Diagram Blok Kontroler PID.
Seperti tampak pada gambar diatas, keluaran kontroler PID merupakan penjumlahan dari keluaran kontroler proporsional,keluaran kontroler integral dan keluaran kontroler diferensial.Gambar tersebut dapat diwujudkan dalam bentuk Laplace:
++= s E(s)τsE
s sEKp sU d
i
)(1)( )(τ
(2.18)
Karakteristik kontroler PID sangat dipengaruhi oleh kontribusi besar dari ketiga parameter P, I dan D. Pemilihan konstanta Kp,Ti, danTd akan mengakibatkan dominasi dari sifat masing-masing elemen.Konstanta yang dominan itulahyang akan memberikan kontribusi besar pada respon sistem secara keseluruhan.
Kontroler PID dengan konfigurasi seperti Persamaan (2.18) dan Gambar 3 disebut kontroler PID ideal. Pada Tugas Akhir ini dipilih konfigurasi kontroler ideal ini karena struktur kontrol inilah yang valid untuk penetapan aturan - aturan tuning yang didasarkan pada perilaku sistem.

Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI−ITS.
2.4 Auto Regressive Exonenous (ARX) Dalam melakukan proses pengendalian dengan
menggunakan kontroler PID maka model matematis plant harus terlebih dahulu dicari karena penentuan parameter PID sangat bergantung pada model matematis dari plant yang akan dikontrol. Hal ini disebabkan setiap perhitungan pada parameter-parameter PID selalu melibatkan parameter dari model. Model ARX merupakan model yang digunakan untuk menunjukan efek dari kontrol dan disturbance pada output dari plant. ARX artinya proses AR dengan exogenus (eksternal) input, dalam kasus ini u(t). Pembangkitan proses ARX diilustrasikan sebagai berikut :
∑=
+−−=n
ii tetyaty
1)()1()( (2.19)
Persamaan tersebut dapat ditulis : A(Q-1) y(t)= e(t)
Gambar 4 Pembangkitan Proses Random ARX
Dengan ∑=
−− +=n
iiQaQA
1
11 1)( merupakan suatu
polinominal sehingga semua akar-akarnya yang terletak
dalam unit circle (A(Z-1) = 0→│Z│<1)
Struktur model ARX dapat dijelaskan sebagai berikut :
A(Q)y(t)=B(Qu(t-nk)+e(t) (2.20)
Melalui bantuan software matlab, model ARX diperoleh menggunakan estimasi dengan metode least square. Dengan
A(Q) = 1 + a1Q-1 + .... + anQ-n (2.21)
dan
B(Q) = 1 + b1Q-1 + ... + bnQ-n (2.22)
3. PERANCANGAN SISTEM
3.1 Perancangan Integrasi Sistem Kontrol
Perancangan integrasi sistem kontrol UAV menggunakan kontrol ardupilot planer. Bertujuan untuk membentuk atau mengatur gerak dari pesawat UAV.
Program yang tertanam dalam mikrokontroler akan diaktifkan secara manual dari remote kontrol jika mode sudah dirubah dari remote kontrol maka program akan menjalankan algoritma kontrol yang tertanam dalam mikrokontroler ATMega2560 dari algoritma tersebut maka track planer untuk fase landing akan eksekusi sesuai dengan jalanya program yang diinginkan. Track planer adalah algoritma yang digunakan untuk menentukan lintasan yang harus dilewati oleh pesawat, track planer akan menjadi set point dari sistem kontrol untuk dikoreksi. Blok diagram untuk sistem auto landing dapat dilihat pada gambar 5 berikut.
Gambar 5 Diagram Blok Arsitektur Sistem Navigasi UAV
3.2 Perancangan Hardware Perancangan hardware merupakan komponen utama
dalam sistem Autopilot yang akan dibuat. Karena dalam tahap ini merupakan langkah yang menentukan dalam hasil implementasi sistem Autopilot yang akan dirancang. Dalam perancangan yang akan dibuat ini dilaksanakan dengan mengintegrasikan seluruh komponen yang sudah dijelsakan dalam kebutuhan komponen. Komponen ini disusun secara seksama sehingga membentuk suatu sistem yang dapat mendukung sistem Autopilot yang akan disusun.Secara umum skematik penyusunan komponen-komponen hardware tersebut ditunjukan pada gambar 6 di bawah ini.
IMU
(Inertial Measurement Unit)
ARDUPILOT MEGA
GPS Receiver Module
Mode Autopilot Control
Ruder/Yaw
Aeleron /Roll
Elevator/Pitch
Throtlle
RC Receiver Aktuator
Ruder Servo
Aeleron Servo
Elevato Servo
Throtlle
Gambar 6 Skema Penyusunan Hardware
u(t)
y(t)
E(t)

Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI−ITS.
Pada perancangan ini, modul IMU yang merupakan
rangkaian dari berbagai sensor akan terhubung dengan Ardu Pilot Mega Board yang terhubung dengan beberapa pin yang terdapat pada Ardupilot Mega.
Pada bagian Ardupilot Mega selain mendapat masukan dari IMU juga mendapatkan masukan dari pembacaan sinyal GPS yang diterima dari satelit. Ditambah lagi dengan masukan sinyal PWM dari Receiver yang berfungsi untuk mengontrol gerakan Actuator dari pesawat model serta menentukan mode dari kontrol pesawat terbang. Berarti berfungsi pula sebagai switching untuk memilih mode manual atau mode Autopilot.
Gambar 7 Skema Ardupilot Mega
3.3 Identifikasi Plant Dalam mendesain suatu kontroler untuk sebuah plant,
diperlukan pengetahuan mengenai sifat dan karakteristik dari plant tersebut. Hal itu dapat diketahui dari fungsi alih yang dimiliki oleh suatu plant. Pada penelitian ini akan dilakukan pengumpulan data input-output dari suatu proses data dari sistem yang akan diidentifikasi. Sistem Identifikasi membangun model matematik dari sistem dinamik ber-dasarkan pengukuran data. Proses identifikasi yang digunakan adalah model pendekatan stokastik dengan struktur ARX.
Model yang digunakan untuk perancangan kontroler adalah yang memiliki nilai kesalahan root mean square terkecil. Kesalahan root mean square merupakan nilai akar kesalahan rata-rata kuadrat yang menunjukan seberapa besar nilai simpangan kesalahan dari nilai nol , Rumus kesalahan root mean square dapat dilihat pada Persamaan (3.7).
RMSE =n
yyn
i ii∑ =−
12)ˆ(
(3.7)
iy adalah data identifikasi pada iterasi ke-i. iy adalah data model pendekatan pada iterasi ke-i ,dan n adalah jumlah data identifikasi. Berikut merupakan nilai RMSE pada tabel
Tabel 1 Data Pengukuran Sudut Roll
No Model Matematik RMSE 1
−3.206𝑠 + 598.6𝑠2 + 8.746𝑠 + 19.93
672.406
2
73.42𝑠 − 47.33𝑠2 + 27.36𝑠 + 23.27
31.67
3
85.74 𝑠 + 46.11𝑠2 + 33.4 s + 19.3
70.5
Tabel 2 Data Pengukuran Sudut Pitch
No Model Matematik RMSE 1
3.438𝑠 − 8.507𝑠2 + 8.943𝑠 + 2.427
46.47539
2
11.26𝑠 + 4.956𝑠2 + 5.09𝑠 + 4.004
20.50
3
9.622 + 74.67𝑠2 + 13.14 s + 19.3
34.48
3.4 Perancangan Decoupling
Setelah mendapatkan transfer function dari plant, karena yang akan dikontrol adalah gerakan lateral dan longitudinalnya (stability ) yaitu gerakan rolling dan pitching. Maka yang dikontrol adalah sistem MIMO (Multi Input Multi Output) dengan menggunakan transfer function dari kecepatan 3 (V3) = 0.72 , masing-masing input sangat mempengaruhi semua output. Untuk itu perlu dirancang suatu decoupling untuk menghilangkan pengaruh interaksi input-output, sehingga masing-masing input hanya untuk

Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI−ITS.
satu output. Berikut gambar decoupling sistem pada penelitian ini, dimana untuk sistem dengan input u1 dan output y1 adalah sistem pengaturan roll, sedangkan sistem dengan input u2 dan output y2 adalah sistem pengaturan pitch.
Gambar 8 Decoupling Sistem
Untuk mendapatkan decoupler D1 adalah :
D1 = −𝐺12𝐺11 (3.7)
Maka didapatkan decoupler D1 sebagai berikut :
D1 = −11.19𝑠+14.685.74𝑠+46.11
x 𝑠2+33.7𝑠+39.4𝑠2+20.69𝑠+28.85
(3.8)
Untuk mendapatkan decoupler D2 adalah:
D2 = −𝐺21𝐺22
(3.9)
Maka didapatkan decoupler D2 sebagai berikut :
D2 = 0.427𝑠+1.4189.622𝑠+74.67
x 𝑠2+13.14𝑠+19.3𝑠2+1.75𝑠+4.854
(3.10)
3.5 Perancangan Kontrol PID
Pada penelitian ini metode digunakan untuk menentukan gain Kp, Ki dan Kd dari kontroler PID. Mengacu pada identifikasi yang dilakukan, diketahui bahwa plant merupakan orde dua dengan input u (t), output y (t) dan fungsi alih plant. Namun untuk mendapatkan hasil posisi maka dikali kan dengan integrator (1/s),di mana :
Y1(s)u1(s)
= ±b1s+b0s3+ a2s2+ a1s+a0
(3.11)
Penentuan parameter Kp, Ki, dan Kd dilakukan dengan metode manual. Dengan menggunakan bantuan toolbox Matlab 7.10 (R2010) melalui fungsi tuning pada sistem closed loop. Didapatkan parameter dengan fungsi alih untuk posisi roll dan pitch seperti terlihat pada persamaan (3.12) dan (3.13).
85.74s+46.11s3+ 33.78s2+ 39,4s
(3.12)
Sehingga didapatkan parameter roll Kp= 1, Ki= 43.8, Kd= 0.1
9.622s+74.67s3+13.14s2+19,93s
(3.13)
Sehingga didapatkan parameter pitch Kp= 1, Ki= 19.7, Kd= 1
4. IMPLEMENTASI DAN PENGUJIAN SISTEM
4.1 Pengujian Sistem
Untuk mengetahui suatu sistem dapat bekerja dengan baik atau tidak maka perlu dilakukan pengujian sistem. Pengujian yang dilakukan pada penelitian Tugas Akhir ini meliputi : • Pengujian accelerometer sebagai pengukur sudut
kestabilan • Pengujian komunikasi serial melalui gelombang radio.
4.2 Hasil Simulasi dan Implementasi
Setelah dilakukan pengujian terhadap elemen-elemen pembangun sistem maka perlu dilakukan simulasi terlebih dahulu sebelum beralih ke proses implementasi. Simulasi dilakukan dengan memberikan uji sinyal step terhadap posisi sudut rolldan pitch. Gambar 9 dan Gambar 10 merupakan diagram blok simulink dari uji sinyal step dengan masukan defleksi aileron dan keluaran sudut aileron dan elevator sebesar 1 rad/s.
Gambar 9 Diagram simulink uji sinyal step sudut roll

Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI−ITS.
Gambar 10 Diagram simulink uji sinyal step sudut roll
Dari hasil pengujian sistem pengaturan sudut roll dan pitch terhadap sinyal uji step didapatkan kurva respon seperti pada Gambar 11 dan Gambar 12.
Gambar 11 Kurva Respon Sudut Roll dengan Sinyal Uji Step
Gambar 12 Kurva Respon Sudut Pitch dengan Sinyal Uji Step
4.2.1 Simulasi Kontroler PID untuk Kestabilan Sudut Pitch dan Roll Untuk mengatasi masalah ketidakstabilan yang terjadi pada gerakan pitch dan roll, maka tindakan selanjutnya adalah dengan memasang kontroler PID pada plant yang telah di decoupling kan sebelumnya. Dari parameter kontroler yang telah di dapatkan sebelumnya pada persamaan (3.13). Dapat dengan langsung disimulasikan. Simulasi untuk kestabilan ini dapat dilihat pada Gambar 14 dan Gambar 15.
Gambar 13 Diagram Blok Plant Decouplin dengan Kontroler PID
Gambar 14 Respon Sudut Pitch Decouplin dengan Kontroler PID
Gambar 15 Respon Sudut Roll Decoupling dengan Kontroler PID
Dari hasil simulasi dapat terlihat bahwa kedua input defleksi sudah tidak saling mempengaruhi karena proses decoupling dan sudah siap diimplementasikan untuk mendapatkan kestabilan kedua gerakan, yaitu gerakan lateral (sudut roll) longitudinal (sudut pitch).

Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI−ITS.
4.2.2 Implementasi Kontroler PID untuk Kestabilan Sudut Pitch dan Roll Setelah melakukan proses simulasi pada Matlab, maka kegiatan selanjutnya adalah mengimplementasikan program kontrol PID dengan kombinasi decoupling padaUAV. Berikut ini adalah Gambar yang merepresentasikan hasil implementasinya.
Gambar 16 Respon Sudut Roll Decoupling dengan Kontroler PID Tuning 1 (Kp=2, Ki=0.2, Kd=0.01)
Gambar 17 Respon Sudut Roll Decoupling dengan Kontroler PID Tuning 2 (Kp=1, Ki=43.8, Kd=0.1)
Gambar 18 Respon Sudut Pitch Decoupling dengan Kontroler PID Tuning 1 (Kp=2.2, Ki=0.16, Kd=0.1)
Gambar 19 Respon Sudut Pitch Decoupling dengan Kontroler PID Tuning 2 (Kp=1, Ki=19.2, Kd=1)
Gambar 20 Respon Pembacaan Ketinggian melalui GPS Tuning 1
Gambar 21 Respon Pembacaan Ketinggian melalui GPS Tuning 2
Dari data tersebut dapat terlihat bahwa kontrol PID dengan tuning manual 1 pada Gambar 16 dan Gambar 18 memberikan respon yang baik untuk menjaga kestabilan tetapi pada kontrol PID dengan tuning manual 2 pada Gambar 17 dan Gambar 19 memberikan respon yang kurang begitu baik, disebabkan oleh gangguan yang disebabkan oleh angin yang begitu besar. Secara garis besar aksi kontrol PID masih menunjukkan kestabilan pada posisinya (ketinggian) yang diperlihatkan pada Gambar 20 dan Gambar 21.

Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI−ITS.
5. KESIMPULAN
Dari percobaan-percobaan yang telah dilakukan pada pengerjaan tugas akhir ini, maka dapat diambil beberapa kesimpulan antara lain: • Penggunaan metode decoupling pada plant UAV
dengan terbukti efektif untuk menghilangkan pengaruh antara kedua input defleksi, yaitu defleksi aileron terhadap sudut pitch dan defleksi elevator terhadap sudut roll.
• Kontroler PID dapat memperbaiki respon relatif cepat menuju keadaan steady state, hal ini dapat terlihat pada simulasi pada sudut roll dan pitch.
• Kontrol PID terlihat memberikan performa yang relatif bagus untuk menjaga kestabilan dan ketinggian pesawat.
DAFTAR PUSTAKA
[1] McLean, D. 1990. Automatic Flight Control Systems. Prentice Hall, Hertfordshire,UK.
[2] K. J. Astrom & T. Hagglund, 1995. PID Controllers: Theory, Design, and Tuning. Research Triangle Park, NC : Instrument Society of America
[3] K. Ogata. 1997. Modern Control Engineering 3rd Edition. Upper Saddle River New Jersey:Prentice-Hall Inc
[4] Ari Heryanto,Wisnu Adi. 2008. Pemrograman bahasa C untuk mikrokontroler ATMEGA8535. Yogyakarta : Andi.
[5] Turkoglu, Kamran. Ozdemir, Ugur. Nikbay, Melike. M. Jafarov, Elbrous. 2008. PID Parameter Optimization of an UAV Longitudinal Flight Control System. World Academy of Science, Engineering and Technology
[6] H. Chao, Y. Cao, dan Y. Chen . 2007.” Autopilots for Small Fixed-Wing Unmanned Air Vehicles: A Survey,” Proc. IEEE Mechatronics and Automation, vol. 25, no.8, pp 3144-3149.
RIWAYAT PENULIS
Andi Aris Rinaldi M dilahirkan di Tonasa I, Pangkep. Merupakan putra pertama dari pasangan H. Musyafir MBA dan Hj. Dahlia. Penulis menamatkan pendidikan dasar di SD Semen Tonasa II Pangkep, kemudian melanjutkan ke SLTP Semen Tonasa II Pangkep. Untuk jenjang SMA penulis menyelesaikan sekolahnya di SMAN 2 Tinggimoncong Gowa.
Setelah menamatkan SMU, penulis melanjutkan studinya di Jurusan Teknik Elektro Institut Teknologi Sepuluh
November Surabaya pada tahun 2007. Spesialisasi bidang studi yang ditekuni oleh penulis adalah Teknik Sistem Pengaturan. Selama kuliah di ITS, penulis aktif menjadi asisten di Laboratorium Teknik Pengaturan. Pada bulan Januari 2012 penulis mengikuti seminar dan ujian Tugas Akhir di Bidang Studi Sistem Pengaturan Jurusan Teknik Elektro FTI – ITS Surabaya sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknik Elektro.


















