
k-Multi-preference query over road networksmla.sdu.edu.cn/.../0/35/2E/BF6E60C9E709C3BDFF0007… ·...
17
ORIGINAL ARTICLE k-Multi-preference query over road networks Peiguang Lin 1,2 • Yilong Yin 1,2 • Peiyao Nie 1 Received: 21 October 2015 / Accepted: 30 March 2016 / Published online: 19 April 2016 Ó Springer-Verlag London 2016 Abstract Nowadays, the road network has gained more and more attention in the research area of databases. Existing works mainly focus on standalone queries, such as k-nearest neighbor queries over a single type of objects (e.g., facility like restaurant or hotel). In this paper, we propose a k-multi-preference (kMP) query over road net- works, involving complex query predicates and multiple facilities. In particular, given a query graph, a kMP query retrieves of the top-k groups of vertices (of k facility types) satisfying the label constraints and their aggregate dis- tances are the smallest. A naı ¨ve solution to this problem is to enumerate all combinations of vertices with k possible facility types and then select the one with the minimum sum distance. This method, however, incurs rather high computation cost due to exponential possible combina- tions. In addition, the existing solutions to other standalone queries are for a single type of facilities and cannot be directly used to answer kMP queries. Therefore, in this paper, we propose an efficient approach to process a kMP query, which utilizes an index with bounded space and reduces the computation cost of the shortest path queries. We also design effective pruning techniques to filter out false alarms. Through our extensive experiments, we demonstrate the efficiency and effectiveness of our pro- posed solutions. Keywords kMP query Road network Query graph Approximation distance matrix Shortest path 1 Introduction Nowadays, it has become increasingly important for people to manipulate and interact with spatial data in many real applications such as the location-based services (LBS), geographic information systems (GIS), navigation systems (GPS), map services (Google Map or MapQuest), and mobile computing systems. The ultimate goal of services in these applications is to enable users to quickly retrieve their interested spatial objects. In the aforementioned applications, spatial data are usu- ally constrained by road networks, and the actual distance between any two objects is given by the length of the shortest path between them. Previous works usually studied queries that involve one type of facilities in road networks, for example, report the nearest restaurant [i.e., nearest neighbor (NN)] with respect to the user’s current location [1] or a restaurant that has the smallest summed distance to a group of users [i.e., aggregate nearest neighbor (ANN)] [2–4]. In practice, however, users may specify much more complex query predicates involving multiple facilities, which is much more challenging to solve than one single query over one type of facility. What is worse, some complex queries cannot even be answered efficiently by using the existing solutions. For example, a traveler may want to find a set of facilities including a hotel, a restau- rant, and a museum, such that the summation of distances among these three facilities is the smallest. The naı ¨ve solution of answering this query is to enumerate all pos- sible combinations of three facilities and then select the one with the minimum summed distance among these & Peiguang Lin [email protected] Peiyao Nie [email protected] 1 School of Computer Science and Technology, Shandong University of Finance and Economics, Jinan, China 2 School of Computer Science and Technology, Shandong University, Jinan, China 123 Pers Ubiquit Comput (2016) 20:413–429 DOI 10.1007/s00779-016-0913-0
Transcript of k-Multi-preference query over road networksmla.sdu.edu.cn/.../0/35/2E/BF6E60C9E709C3BDFF0007… ·...

ORIGINAL ARTICLE
k-Multi-preference query over road networks
Peiguang Lin1,2 • Yilong Yin1,2 • Peiyao Nie1
Received: 21 October 2015 /Accepted: 30 March 2016 / Published online: 19 April 2016
� Springer-Verlag London 2016
Abstract Nowadays, the road network has gained more
and more attention in the research area of databases.
Existing works mainly focus on standalone queries, such as
k-nearest neighbor queries over a single type of objects
(e.g., facility like restaurant or hotel). In this paper, we
propose a k-multi-preference (kMP) query over road net-
works, involving complex query predicates and multiple
facilities. In particular, given a query graph, a kMP query
retrieves of the top-k groups of vertices (of k facility types)
satisfying the label constraints and their aggregate dis-
tances are the smallest. A naıve solution to this problem is
to enumerate all combinations of vertices with k possible
facility types and then select the one with the minimum
sum distance. This method, however, incurs rather high
computation cost due to exponential possible combina-
tions. In addition, the existing solutions to other standalone
queries are for a single type of facilities and cannot be
directly used to answer kMP queries. Therefore, in this
paper, we propose an efficient approach to process a kMP
query, which utilizes an index with bounded space and
reduces the computation cost of the shortest path queries.
We also design effective pruning techniques to filter out
false alarms. Through our extensive experiments, we
demonstrate the efficiency and effectiveness of our pro-
posed solutions.
Keywords kMP query � Road network � Query graph �Approximation distance matrix � Shortest path
1 Introduction
Nowadays, it has become increasingly important for people
to manipulate and interact with spatial data in many real
applications such as the location-based services (LBS),
geographic information systems (GIS), navigation systems
(GPS), map services (Google Map or MapQuest), and
mobile computing systems. The ultimate goal of services in
these applications is to enable users to quickly retrieve their
interested spatial objects.
In the aforementioned applications, spatial data are usu-
ally constrained by road networks, and the actual distance
between any two objects is given by the length of the shortest
path between them. Previous works usually studied queries
that involve one type of facilities in road networks, for
example, report the nearest restaurant [i.e., nearest neighbor
(NN)] with respect to the user’s current location [1] or a
restaurant that has the smallest summed distance to a group
of users [i.e., aggregate nearest neighbor (ANN)] [2–4].
In practice, however, users may specify much more
complex query predicates involving multiple facilities,
which is much more challenging to solve than one single
query over one type of facility. What is worse, some
complex queries cannot even be answered efficiently by
using the existing solutions. For example, a traveler may
want to find a set of facilities including a hotel, a restau-
rant, and a museum, such that the summation of distances
among these three facilities is the smallest. The naıve
solution of answering this query is to enumerate all pos-
sible combinations of three facilities and then select the
one with the minimum summed distance among these
& Peiguang Lin
Peiyao Nie
1 School of Computer Science and Technology, Shandong
University of Finance and Economics, Jinan, China
2 School of Computer Science and Technology, Shandong
University, Jinan, China
123
Pers Ubiquit Comput (2016) 20:413–429
DOI 10.1007/s00779-016-0913-0

facilities. Clearly, this naıve solution is quite expensive in
terms of the computation cost and thus cannot be applied to
large scale of networks with huge number of facilities,
especially when the user needs a fast response.
In this paper, we study an important and useful query,
namely k-multi-preference (kMP) query in road networks,
which involves complex query predicates over multiple
facilities. Specifically, given a user-specified multi-prefer-
ence pattern (i.e., query graph) with constraints on attri-
butes of each facility, a kMP query retrieves k groups of
facilities from a road network, such that, in each group, the
vertices fulfill constraints of query graph (in terms of
facility types and attributes on each facility), and the
aggregate road network distances connecting these vertices
are the smallest. Based on the returned results, a user is
able to enforce a sense of sequence of target facilities to be
visited. The kMP query has many useful applications, and a
typical example is illustrated as follows.
Running example: Consider a traveler who wants to have
a tour around a new city. Assume that he/she has two
candidate plans, A and B, which are two possible kMP
queries, as shown in Fig. 1, where k = 4.
Plan A (3-day plan): As illustrated in Fig. 1a, the traveler
stays in a hotel (H), and he plans to visit three facilities
within 3 days, for example, a museum (M), a park (P), and
a shopping mall (S), each facility per day.
Plan B (1-day plan): As illustrated in Fig. 1b, the traveler
first checks in a hotel (H). Then, within 1 day, he will visit
a museum (M), followed by a park (P) and a shopping mall
(S), and finally come back to hotel (H).
Plan requirements: For Plan A, the traveler plans to stay
in a 5-star hotel (H), which has price within 1000–3000
HKD, the museum (M) must be an art museum, and the
shopping mall (S) should have an apple store. On the other
hand, in Plan B, the traveler may require a 5-star hotel
(H) with price 1000–3000 HKD, and a shopping mall
(S) selling a particular souvenir.
In Fig. 1, each edge is corresponding to a traveling path
for the traveler to drive from one endpoint (facility) to
another on the road network. The weight of the edge
implies the total traveling distance on this edge. Note that,
in our example, Plans A and B have query graphs of star
and ring shapes, respectively. Nevertheless, our proposed
solutions in this paper are generic to tackle the kMP
problem with the query graph of arbitrary shape (i.e.,
allowing arbitrary graph-based patterns).
Different from the traditional graph matching prob-
lem, in our kMP problem, the traveler may specify
preferences about the places that he/she wants to stay/
visit, which involve constraints on arbitrary attribute
data types. For example, he/she might only be interested
in 5-star hotels, history museums, parks having restau-
rants in it, and shopping malls selling a specific sou-
venir. In other words, he/she can specify any constraints
related to the facilities (as described in the running
example). In this case, the traveler can exactly issue a
kMP query to retrieve top-k groups of facilities (in-
cluding H, M, P, and S) that minimize his/her total
traveling distance in the road network.
Challenges In the running example above, there are
totally Hj j � Mj j � Pj j � Sj j combinations of facilities in
the worst case, where :j j is the number of facilities satis-
fying query predicates (e.g., 5-star hotel). Thus, a
straightforward way to tackle the kMP problem is to
repeatedly use these facility combinations as query
point(s) of nearest neighbor (NN) or aggregate nearest
neighbor (ANN) queries and then combine the results.
However, this method clearly incurs high computation cost
due to large number of facility combinations.
In brief, the query answering of a kMP query is chal-
lenging for two main reasons. First, predicates involving
facility types, and constraints on facilities are complex and
costly to check. Second, it is inefficient to compute the
shortest path distance between two vertices on the road
network. In addition, given a very large road network, it is
not possible to put its entire index in the memory. To
address the challenges above, we propose an efficient
approach to answer kMP queries, based on a shortest path
approximation scheme, which results in satisfactory prun-
ing power and query answering-time.
In particular, we highlight our contributions as follows:
1. We propose a novel query, k-multi-preference (kMP),
in the context of large road networks in Sect. 3.
2. We propose a general framework for handling kMP
queries over large road networks in Sect. 5. Specifi-
cally, a filter-and-refine strategy is applied in order to
shrink the searching space and reduce the computation
cost.
3. We propose effective and nontrivial filtering methods
in Sect. 5. In addition, we design a cost model to select
the shortest path tree with high pruning powers.
(a) (b)
1
1
1
2 2
S
H
M P
S
H
M P
2 1
Fig. 1 An example of the k-multi-preference query. a Plan A, b Plan
B
414 Pers Ubiquit Comput (2016) 20:413–429
123

4. In Sect. 6, extensive experiments have been conducted
to demonstrate the efficiency and effectiveness of our
proposed approaches to answer kMP queries on both
real and synthetic datasets.
In addition, Sect. 2 reviews related works on both road
network modeling, and query processing over road net-
works or large graphs. Section 7 concludes this paper.
2 Related work
Road network modeling: Road networks combine geo-
graphic and graph-theoretic information in one structure.
The majority of studies consider a road network as a
general graph, directed [5–10] or undirected [2, 11–13]. On
the other hand, a number of previous works model a road
network as a planar graph (e.g., [14]). However, such a
planarity cannot be guaranteed in modern road network
datasets. This is because there are some cases with ‘‘edge-
crossing,’’ caused by tunnels and bridges in reality. In [15],
the authors conducted a series of experiments demon-
strating that, for an n-vertex road network, there will typ-
ically be Hffiffiffi
npð Þ road segment crossings when all those
segments are projected on the surface of a sphere using
their GPS coordinates.
Query processing over road network: Query processing
on road networks has been extensively studied [1, 2, 6–10,
12, 13], since its unique spatial and topological features.
Essentially, the kMP query distinguishes itself from the
existing works since it considers the pattern with multiple
predefined labels. To the best of our knowledge, this is the
first work to address the kMP query over road networks,
where the network distance is adopted as the distance
metric. With kMP, users may specify much more complex
query predicates involving multiple facilities, which is
much more challenging to solve than one single query over
one type of facility. The most relevant query, namely
Pattern Match, has been investigated in several works [16–
19]. There are two typical types of pattern matching
queries that are studied recently. The first is defined in
terms of subgraph isomorphism, which finds all subgraphs
of G that are isomorphic to a given query graph Q [16]. The
second one, which is much more relevant to our work, is
defined as follows [17]: Given a data graph G, a query
graph Q (with n vertices), and a parameter e, n vertices in
G can form a match to Q, if: (1) these n vertices in G have
the same labels as the corresponding vertices in Q; and (2)
for any two adjacent vertices v and u in Q (i.e., there is an
edge between v and u in Q), the distance between two
corresponding vertices in G is no larger than e. This query
returns all the matches of Q in G. In [20], the authors treat
taxi ridesharing problem as finding k-nearest neighbors
problem although it does not cover all challenges in min-
imizing system wide travel time and travel distance.
3 Problem definition
In this section, we give the formal definition of k-multi-
preference (kMP) query over a road network.
3.1 Data model
Road network model: We naturally model a road network
as a vertex-labeled edge-weighted undirected graph. First,
we assume this graph is a nearly a planar graph. A typical
planar graph is a graph that can be drawn on a plane such
that there are no ‘‘edge crossings,’’ that is, edges intersect
only at their common vertices. In this paper, for simplicity,
we assume that there are only a small number of edge
crossings existing in the graph. This assumption is usually
not uncommon, especially when encountering the follow-
ing circumstances:
1. The dataset is extracted from a planar graph, e.g., from
satellite photos.
2. The application service can tolerate the inaccuracy that
is introduced by treating a nonplanar graph as a planar
graph.
3. The computing power is insufficient to handle the
index structure of query processing for nonplanar
graphs, or lead to unsatisfactory response time (e.g.,
cell phones or GPS devices).
Note that the only property related to our road network
model is Property 1, which will be discussed in Sect. 3.1.
Property 1 assumes that, for a given shortest path P and a
vertex v, the distances from v to all the vertices in P can
be approximated. This property is not uncommon in many
real road network datasets, having a very weak constraint
on the classical graph model. Thus, our data model is
general enough to capture the features of real road
networks.
Facilities and attributes: In addition to the graph
structure, each vertex in road networks is also associated
with a ‘‘facility type’’ and a number of ‘‘attributes.’’ A
‘‘facility’’ indicates the category of a vertex, such as
museum and hotel, whereas ‘‘attributes’’ are features pre-
defined for each facility type, for example, ‘‘star-level’’ and
‘‘price’’ can be considered as attributes of a ‘‘hotel.’’
Constraints on such facilities and attributes in vertices are
often specified by query graphs, which will be defined in
the next subsection.
Pers Ubiquit Comput (2016) 20:413–429 415
123

3.2 Definition of kMP queries
Query graph: A query graph GQ (VQ, EQ) is also an edge-
weighted graph, consisting of two pieces of information
below.
(A) The constraints on facilities types and attributes:
Each vertex is labeled with a facility type together
with a number of attributes.
(B) The route of visiting facilities: The weight of an edge
e(u, v) represents the number of times the user will
travel between u and v.
As mentioned above, in the query graph, some condi-
tions may be specified by users to constrain the ‘‘facility
type’’ and/or attributes of vertices. As in the previous
example of the trip plan, we list the domain of facility
types, and the domains/constraints of attribute values for
the facility ‘‘Hotel.’’ In real applications, such domains or
constraints can be specified by service providers or users.
Domain of facility types:
Hotel Museum Park Shopping mall
Domains/constraints of attributes for facility ‘‘Hotel’’:
Price (USD) Star-level Free-WIFI Swimming pool (USD/h)
500–1000 5-star Yes 10
1000–2000 4-star 20
2000–3000 3-star No 30
Above 3000 Others Free
The function of range constraints enables users to
specify each facility attribute with a subset of its domain of
attribute values. For a vertex v, we call this subset the range
constraints on an attribute A, denoted v.RC(A). Facilities
and attributes are associated with each vertex on both road
networks and query graphs. For instance, a user may be
only interested in hotels with attribute ‘Price’ being
‘500–1000’ or ‘2000–3000’, and then, on the query graph,
there is a vertex hq with ‘Hotel’ as facility type and attri-
bute constraint hq.RC(Price) = {‘500–1000’, ‘2000–
3000’}. Let h be a facility on the road network labeled with
‘Hotel’, if h.RC(Price) = {others, ‘2000–3000’}, and then,
h should be considered to be a vertex in the results; if
h.RC(Price) = {‘others’, ‘1000–2000’}, h should not be
considered.
kMP queries over a road network: We consider each
input kMP query as a weighted small graph GQ(VQ, EQ),
with each vertex associated with one type of facility and its
attributes, which determines the facility type and con-
straints on attributes. The edges and weights determine the
traveling plan among the facilities. Now, we formally
define the kMP query as follows.
Definition 1 (target vertex) Given a road network G(V,
E) and an input query graph GQ(VQ, EQ) where
VQ = {v1,…, vn}, the function wðvi; vjÞ denotes the weightof the edge ðvi; vjÞ.
A vertex ui in V is said to be a target vertex w.r.t. a
vertex vi in VQ, if and only if the following conditions hold:
1. vi and ui are of the same facility type;
2. for all attributes A belonging to this facility type,
|vi.RC(A) \ ui.RC(A)|[ 0.
Definition 2 (label match) Given a road network G(V, E)
and an input query graph GQ(VQ, EQ) where VQ = {v1,…,
vn}, the function wðvi; vjÞ denotes the weight of the edge
ðvi; vjÞ.
A set of n distinct vertices {u1,…, un} in V is said to be a
label match w.r.t. GQ, if and only if, for all i, ui is a target
vertex w.r.t. vi.
Definition 3 (label match distance) Given a road network
G(V, E) and an input query GQ(VQ, EQ) with edge-weight
function w(.), for a label match M w.r.t. GQ, the label
match distance (LMD) is defined as
LMDðMÞ ¼X
ðvi;vjÞ2EQ
wðvi; vjÞDistðui; ujÞ;
where Distðui; ujÞ denotes the shortest distance between uiand uj over G.
Definition 4 (k-multiple-preference query) Given a road
network G(V, E), an input query GQ(VQ, EQ) where
VQ = {v1,…, vn} and a user-defined parameter k, a k-
multiple-preference query is to find the top-k matches with
minimal LMDs.
4 Preliminary
4.1 Approximation oracle with connection set
An approximate distance oracle is a data structure which can
approximate the shortest path, via Distapðu; vÞ; for a (con-
nected) graph G = (V, E). If the reported Distapðu; vÞ; sat-isfies that Distðu; vÞ�Distapðu; vÞ� aDistðu; vÞ8u; v 2 V ,
the distance oracle is said to have multiplicative stretch a.Clearly, we expect the answer time and multiplicative
stretch to be as small as possible. One can see that the trade-
off is actually between the multiplicative stretch ð1þ eÞ andthe index space O ln =eð Þ, and e can be minimized by
416 Pers Ubiquit Comput (2016) 20:413–429
123

utilizing all the memory space available. In this paper, we
limit the stretch no larger than 2 in order to guarantee sat-
isfactory pruning power, i.e., for a parameter e 2 ð0; 1�;Distðu; vÞ�Distapðu; vÞ� ð1þ eÞDistðu; vÞ:
Let P be the shortest path in a graph G. A pair (p, v) of
vertices where p is in P and v is in G is a connection for v
with respect to P. A set C of such connections covers v in G
with respect to P if, for every node p of P, there is a
connection (p, u) in C such that Distðp; vÞ�Distðu; vÞþDistðp; uÞ� ð1þ eÞDistðp; vÞ. Such a set is named con-
nection set w.r.t. P. In [21], it is proved that given a planar
graph G and a shortest path P, in linear time, one can
compute a set C of connections that covers all nodes of G
and that has at most 2 1e
� �
þ 1 connections per vertex v. In
real road network datasets, the number of connections
remains when there is no edge crossing existing on the
path. Note real road networks have only a very small
number of edge crossing a single path; therefore, the
number of connections can be estimated as O 1e
� �
, which
can be empirically confirmed in the experiments. The
sketch algorithm of finding those connections [22] is
illustrated as Algorithm 1.
_____________________________________________________
_____________________________________________________
Algorithm 1: Constructing_Connection_Set [4]Find the vertex a on P that is the nearest to vSet x=a, and iterate y through the vertexes from atowards the end-points of P. If (v,x) does not cover (v,y) within the approximation threshold, we add (v,y) and set x=y
Property 1 In a road network, for any shortest path P
and a given vertex v, Algorithm 1 can compute a connec-
tion set contains O 1e
� �
connections.
Intuitively, in order to minimize the index space, we
expect to find a minimal number of shortest paths such
that every vertex lays on at least one of them. Solely for
the shortest path (SP) query, we can consider this
problem as an optimization problem and find a near-
optimal set of paths (since it is NP-hard). In [22], a
graph decomposition technique based on LIPTON-TAR-
JAN separator is also proposed on SP queries, which
leads to slightly worse but also constant processing time.
However, another major factor dominating the computing
time of kMP is the huge number of combinations of
facilities. Therefore, we propose an index schema based
on one shortest path tree and associated pruning tech-
niques, which significantly reduce the number of
combinations.
4.2 Baseline method with LLR embedding
One straightforward way to process a kMP query is to
convert this problem into a variant of the pattern match-
ing query defined in [16]. We call this baseline method
‘‘D-join.’’ In the original setting of Gallagher [16], there
is constrictive edge-distance parameter d for ruling out
candidates. In particular, if ðvi; vjÞ 2 EQ and uiðujÞ is a
target vertex of viðvjÞ, then a label match containing
ui and uj can be considered as an output only if
Distðui; ujÞ� d.The essential difference between kMP and D-join is
twofold. First, each pattern matching query is associated
with an edge-length threshold, but kMP is not. Second,
kMP enables users to pose range constraints on vertex
labels, whereas the pattern matching does not support such
range constraints. Therefore, in order to perform the kMP
query answering efficiently, we generalize the method
proposed in [16] in the following way:
1. We propose a novel binary encoding method to
efficiently handle range constraints. With such a
method plugged in, a kMP query can be considered
as a pattern matching query, with the edge-distance
parameter equal to positive infinity;
2. During the processing of D-join, we ignore the weights
of edges on the query graph, so that the results are
candidate label matches; and
3. Lastly, we refine candidates by computing the
weighted sum of the edges, according to Definition
3, and obtaining their LMDs.
We dynamically maintain a top-k threshold for pruning
other candidates. In order to enable the pruning with such a
threshold, we apply an LLR embedding technique [21].
Specifically, LLR maps all vertices in G into points in a
vector space Rk, where k is the dimensionality of the vector
space. We briefly illustrate the embedding process as
follows:
1. Let Sn,m be a subset of randomly selected vertices in V.
Then, for any vertex v, we define Dðv; Sn;mÞ as the
distance from v to the closest vertex in Sn,m, that is,
Dðv; Sn;mÞ ¼ minu2Sn;mfDistðu; vÞg, where Dist(u, v) is
the shortest path distance from u to v on the road
network.
2. We randomly select H log2 Vj j� �
subsets to form the set
R ¼ fS1;1; . . .; S1;a; . . .; Sb;1; . . .; Sb;ag, where a ¼H log Vj jð Þ and b ¼ H log Vj jð Þ; hence, ba ¼ k.
3. The mapping function E: V ! Rk is defined as
follows: for any vertex v in V, we have
EðvÞ ¼ Dðv; S1;1Þ; . . .;Dðv; S1;aÞ; . . .;Dðv; Sb;1Þ; . . .;Dðv; Sb;aÞ;� �
;
Pers Ubiquit Comput (2016) 20:413–429 417
123

4. Finally, in the converted vector space Rk, we use
DistRðu; vÞ to denote the distance between u and v, so
we have
DistRðu; vÞ ¼ maxn;m
jDðv; Sn;mÞ � Dðu; Sn;mÞ
Theorem 2.1 ([21]) Given two vertices u and v in G, dis-
tance, DistRðu; vÞ; between two corresponding points in the
converted vector spaceRk, and the shortest distanceDistðu; vÞbetween u and v in the original road network, we have:
DistRðu; vÞ�Distðu; vÞ
Lower bound of LMD: Therefore, by using the embed-
ding techniques above, we can estimate the lower bound,
LMDR; of LMD value for a label match, by using the
distance in the vector space.
In particular, by Definition 3, this lower bound is given
by:
LMDR ¼X
ðvi;vj2EQÞwðvi; vjÞDistRðui; ujÞ:
X
ðvi;vjÞ2EQ
wðvi; vjÞDistðui; ujÞ�X
ðvi;vjÞ2EQ
wðvi; vjÞDistRðui; ujÞ:
We obtain LMDR; as a lower bound of LMD (see proof
in [21]).
Therefore, we can apply LMDR; to reduce the costly
computation of (exact) LMDs. Finally, we refine the
remaining candidates by calculating their actual LMD
values. This way, the D-join baseline method can obtain k
patterns with minimal LMDs (i.e., kMP answers).
Although the D-join baseline method can correctly
retrieve kMP answers, there are two major flaws for road
networks of large sizes:
1. With the edge-distance parameter initially being positive
infinity at the beginning, the number ofmatching patterns
canbe toohuge tobehandled, since noneof themcould be
pruned by the edge-distance constraint. The pruning
bounds of D-join could be very loose, since the edge-
length threshold is first set to positive infinity. Consider a
kMP query with five vertexes in VQ, and there are 100
satisfactory facilities for each of them. Then, there will be
1010 matches as the result of joining tables!
2. To our best knowledge, there is no algorithm available
to support the exact shortest path query unless using
Oðn2Þ space is given for indexing, where n is the
number of vertices. A single match already requires
EQ
�
�
�
� shortest path queries. Since modern road networks
contain huge number of vertexes, such a response time
is not satisfactory for realistic applications.
5 Generic framework
In this subsection, we propose a generic framework for
answering k-multi-preference (kMP) queries over a road
network. Algorithm 2 depicts the pseudo-code of the kMP
framework. Specifically, algorithm kMP_Framework con-
sists of two portions, offline and online processing._____________________________________________________Algorithm 2 kMP_Framework {
// offline processing1: Constructing Approximation Distance Matrix2: Label each vertex by its distance to the root//online processing3: for each label match{4: if (branch-level pruning succeeds) 5: the whole branch is pruned and goto next branch6: else 7: perform match-level pruning8: update threshold best_so_far9: }
10: refine candidates and return kMP answers}_____________________________________________________
Offline processing: For the offline processing, in order to
efficiently obtain upper and lower bounds of pairwise
distance between vertices in road network, we create an
approximation oracle, namely approximation distance
matrix (line 1). This matrix can be used to enable our
online pruning method (i.e., match-level pruning discussed
in Sect. 5.2). Compared to the accurate distance Dist(u, v),
the error of approximated distance, Distapðu; vÞ, is boundedby an arbitrary small real number e, that is:
Distðu; vÞ�Distapðu; vÞ� ð1þ eÞDistðu; vÞ
To obtain a good matrix with high pruning power, we
propose to construct it by finding a shortest path tree T that
covers the entire road network and then decomposing T.
Then, the approximate answer (to a point-to-point shortest
path query) can be obtained within a constant time strictly
bounded by log2ð2e�1 þ 1Þ time cost, and overall Oðln =eÞindex space, where l is the number of leaf vertices in the
shortest path tree.
As a second step, the offline processing aims to label
each vertex with its distance to the root (line 2). This
precomputed data can be used by our branch-level pruning
method (discussed later in Sect. 5.2).
Online processing:
1. Filtering phase (lines 3–9): For each kMP query
GQ(VQ, EQ), we apply our proposed pruning methods,
namely branch-level pruning and match-level pruning,
to rule out false alarms of candidate matches. The
online process dynamically maintains a list of candi-
dates, and prune candidates alternatively by branch-
level pruning (line 4) and match-level pruning (line 7).
418 Pers Ubiquit Comput (2016) 20:413–429
123

The rationale of the match-level pruning is to obtain
lower/upper bounds of LMD distances by utilizing the
guaranteed error of approximated distances. Since the
computation cost of exact LMD is high, instead, we com-
pute its lower/upper bounds at low costs via approximate
LMD (LMDap), which is obtained from the offline pre-
computed approximation distance matrix.
On the other hand, the branch-level pruning is essen-
tially based on the triangle inequality. This pruning tech-
nique is applied to avoid false alarms of target vertex
combinations.
2. Refinement phase (line 10): After the filtering phase,
we can obtain a number of candidates. We refine these
candidates, by calculating their exact distances in road
networks, and finally return actual kMP query answers
(line 10).
5.1 Offline processing with approximation oracle
To process a kMP query, encountering the fact that many
shortest distance queries may be generated, we consider
using the value range of approximate answers to prune,
which significantly shrinks the searching space.
Generally, for one match M, computing LMD(M) gen-
erally requires |EQ| shortest path queries, each of which
costs OðnÞ answer time (assuming no Oðn2Þ space avail-
able), i.e., O(|EQ|n) for computing LMD(M). One can see
that computing exact LMDs is very costly, especially when
there are many label matches. Since our concern is to find
the top-k matches, if we could find ranges of LMDs, which
are sufficient to rank the top-k matches, and the response
time is much faster than O(|EQ|n); consequently, the overall
processing time can be reduced significantly.
Lemma 1 (upper-bound pruning) Let best_so_far be the
upper bound of the LMD of the kth label matches the label
matches we have seen so far. A label match M can be safely
pruned, if it holds that LMD(M)[ best_so_far.
Running example:
Label match Lower bound Upper bound
M1 1 2
M2 1.5 2.5
M3 2.6 3
M4 (pruned) 3.1 3.2
Suppose k = 3, and we already have the above four ranges
of LMDs. Then, any label match M with LMD(M) whose
lower bound is larger than 3 is guaranteed not to be in the
answer set to be returned, so M4 can be safely pruned.
To enable the upper-bound pruning, we propose to use an
approximate distance to obtain the distance bounds. To be
clear, we do not accept approximate query answers, we only
apply the approximation as bounds to improve the compu-
tational efficiency. Through the above running example, we
see the bounds of LMD are very conductive for finding the
expected top-k answers, especially the bounds are very tight.
In following, we propose and describe an approximation-
based index, from which the bounds of a LMD can be
obtained very efficiently. For instance, suppose the
approximate value of LMD is obtained as c with multi-
plicative stretch a, and then, we have c as upper bound and
ðc=aÞ as lower bound. In addition, such index also facilitatespruning method to avoid enumerating unnecessary label
matches, illustrated in Sect. 6.2.
5.1.1 Constructing approximation distance matrix
We consider a shortest path tree T spanning the road net-
work. A shortest path tree is a subgraph of a given graph
constructed so that the distance between a selected root
node and all other nodes is minimal. Such a spanning tree
can be easily derived from the information obtained by
running a single instance of Dijkstra’s single-source
shortest path algorithm [23]. Suppose T is rooted at vertex
r, and then, the path from each leaf vertex v to r is their
shortest path in graph G. We call such a path branch path.
In other words, each pair (v, r) uniquely identifies a branch
path of T. Now we define an important concept—branch
segment.
Definition 5 (branch segment) Given a shortest path tree
T, a branch segment is an ordered sequence of vertices on a
branch path, in an ascending order of their distances to the
root.
There are two steps to build this approximation oracle—
first, we decompose the shortest path tree T into a set of
branch segments; second, we select a number of vertices on
each branch segment and build connection sets with
Algorithm 1 in order to construct the approximation dis-
tance matrix.
Branch-based decomposition: We find the branch path
containing the most vertices from T and remove the ver-
tices (with their incident edges) on the path from T. As a
result, T is decomposed into a set of subtrees {T1, T2,…}.
Then, we repeat the decomposition process recursively on
each of the subtrees, until the result is an empty set. One
can see that all the vertices are contained by exactly one
branch segment. During the recursion, branch segments
with no facility vertices are eliminated. It is clear that the
number of branch paths extracted from T is upper-bounded
by the number of leaf vertices of T.
Pers Ubiquit Comput (2016) 20:413–429 419
123

_____________________________________________________Algorithm 3 Branch_based_Decomposition {
Input: a shortest path tree covering T all the vertices in G, an set Stree of sub-trees, an set Sbranch of branch segments(initially, Stree= Sbranch=∅)
Output: Sbranch1: Finding the branch path b with the maximal number of
labeled vertices 2: add b to Sbranch ;3: remove b from T, then T = T/b = { T1 , T2 , …Ts}4: for 1i ← to s5: add Ti to Stree6: for each sub-tree Tj in Stree7: if (Tj is a path)8: Stree = Stree – {Tj}, Sbranch = Sbranch {Tj};9: else Branch_based_Decomposition(Tj, Stree, Sbranch);}
_____________________________________________________
Remark A branch segment does not have to be a con-
nected graph. This feature is useful for the branch-level
pruning algorithm.
Approximation distance matrix: As a result of the
decomposition, T is split into a list of branch segments,
denoted as {S1,S2…Sl}. One can see that every vertex is
contained by exactly one branch segment, which is also a
shortest path over G. By applying the algorithm in
Sect. 6.3, we construct a n� l matrix as follows.
S1 S2 … Sl-1 Sl
V1 NULL C11 C1(l-1) C1l
V2 C21 NULL C2(l-1) C2l
…Vn-1 C(n-1)1 C(n-1)2 C(n-1)(l-1) NULL
Vn Cn1 Cn2 NULL Cnl
In the matrix, each cell (V, S) records either a NULL
value or a memory address pointing to a collection set of
v with respect to S. Note that the branch segments are also
shortest paths at this time. A NULL value occurs that v is on
the branch segment S. In particular, the root vertex contains
NULL value for each of its cells since it is on every branch
segment of T. We sort the branch segments by the number of
vertices they contains, i.e., S1 goes through the most number
of vertices, while Sl goes through the least.
On the other hand, a connection set C pointed by (V,
S) is constructed as a list below:
Note that the connections are ranked by the distance
they are from the root by ascending order, not from V. To
be clear, in the above data structures, the vertices Vi are
references of object instances of the vertices from the
shortest path tree T.
Now we explain why such index is particularly small. In
reality, the number of vertex representing the ‘intersec-
tions’ of roads is only the minority, while most vertices are
‘facilities’ over road segments. For instance, among the
vertices in ‘CA’ dataset (see Sect. 6), there are around 20k
for intersections and 80k for facilities. As illustrated in
Fig. 2, facilities are added on the graph, and the topological
structure would not be changed. Hence, the number of leaf
vertices of a shortest path tree also remains unchanged.
5.2 Pruning strategies
5.2.1 Match-level pruning
5.2.1.1 Query Distapðu; vÞ and approximate LMD The
rationale of match-level pruning is to use high-efficiency
approximate query answers as bounds of the exact answers.
This is because the exact answers are quite costly to obtain,
while the approximate answers are already sufficient to
filter out the majority of nonresult candidates for kMP
query.
We label each vertex u with its (only) branch segment,
and its distance from the root of T, denoted as u.s and u.d,
respectively. Then, for a pair (u, v), then two cells from the
approximation distance matrix could be located, i.e., (u,
v.s) and (v, u.s). We randomly take one, say (u, v.s), which
references to either a NULL value or a connection set C.
Obviously, NULL value indicates that u and v are in the
same branch segment, so we actually get the exact distance,
i.e., Distapðu; vÞ ¼ Distðu; vÞ ¼ u:d � v:dj j. More likely, we
compute the distance with connection set C according to
Fig. 2 Illustration of road modeling
Vertices on S Distance from V
V11 10
V21 15
V31 8
V41 16
420 Pers Ubiquit Comput (2016) 20:413–429
123
the approximation distance matrix. Since C contains a list
of vertices ranked by their distances form the root, we
perform a binary search over the list and locate the two
vertices, denoted vi and vj that are the closest to v. Let diand dj be the associated distance in C, and then, we have
Distapðu; vÞ ¼ min di þ vi:d � v:dj jð Þ; dj þ vj:d � v:d�
�
�
�
� �� �
.
Any point-to-point approximation distance can be
answered from the branch-based index schema with
O log e�1ð Þð Þ time cost. Thus, for any match M, an
approximate value of LMDðMÞ (denoted LMDapðMÞ) canbe calculated by querying each edge-distance in EQ. By
Definition 3, we have: LMDapðMÞ ¼P
ðvi;vjÞ2EQ
wðvi; vjÞDistap
ðui; ujÞ with O EQ
�
�
�
� log e�1ð Þ� �
time cost. We summarize the
pruning rule in the following theorem.
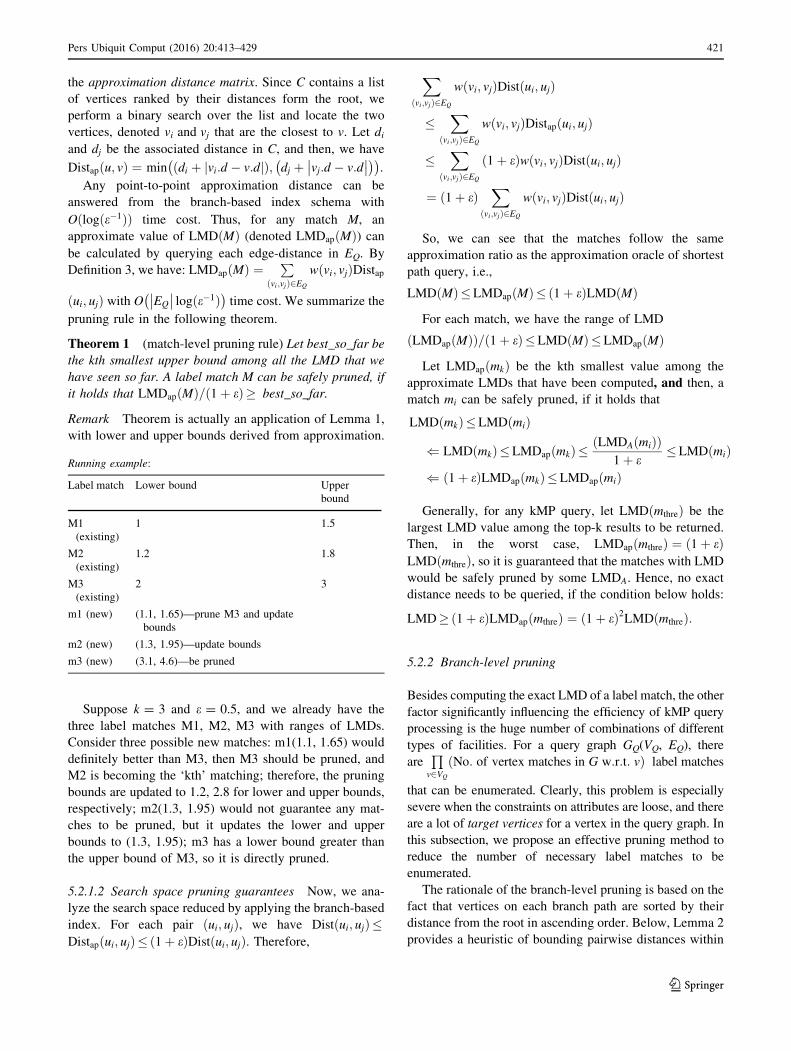
Theorem 1 (match-level pruning rule) Let best_so_far be
the kth smallest upper bound among all the LMD that we
have seen so far. A label match M can be safely pruned, if
it holds that LMDapðMÞ= 1þ eð Þ� best_so_far.
Remark Theorem is actually an application of Lemma 1,
with lower and upper bounds derived from approximation.
Running example:
Label match Lower bound Upper
bound
M1
(existing)
1 1.5
M2
(existing)
1.2 1.8
M3
(existing)
2 3
m1 (new) (1.1, 1.65)—prune M3 and update
bounds
m2 (new) (1.3, 1.95)—update bounds
m3 (new) (3.1, 4.6)—be pruned
Suppose k = 3 and e = 0.5, and we already have the
three label matches M1, M2, M3 with ranges of LMDs.
Consider three possible new matches: m1(1.1, 1.65) would
definitely better than M3, then M3 should be pruned, and
M2 is becoming the ‘kth’ matching; therefore, the pruning
bounds are updated to 1.2, 2.8 for lower and upper bounds,
respectively; m2(1.3, 1.95) would not guarantee any mat-
ches to be pruned, but it updates the lower and upper
bounds to (1.3, 1.95); m3 has a lower bound greater than
the upper bound of M3, so it is directly pruned.
5.2.1.2 Search space pruning guarantees Now, we ana-
lyze the search space reduced by applying the branch-based
index. For each pair ðui; ujÞ, we have Distðui; ujÞ�Distapðui; ujÞ� ð1þ eÞDistðui; ujÞ. Therefore,
X
ðvi;vjÞ2EQ
wðvi; vjÞDistðui; ujÞ
�X
ðvi;vjÞ2EQ
wðvi; vjÞDistapðui; ujÞ
�X
ðvi;vjÞ2EQ
ð1þ eÞwðvi; vjÞDistðui; ujÞ
¼ ð1þ eÞX
ðvi;vjÞ2EQ
wðvi; vjÞDistðui; ujÞ
So, we can see that the matches follow the same
approximation ratio as the approximation oracle of shortest
path query, i.e.,
LMDðMÞ�LMDapðMÞ� ð1þ eÞLMDðMÞ
For each match, we have the range of LMD
ðLMDapðMÞÞ=ð1þ eÞ�LMDðMÞ�LMDapðMÞ
Let LMDapðmkÞ be the kth smallest value among the
approximate LMDs that have been computed, and then, a
match mi can be safely pruned, if it holds that
LMDðmkÞ�LMDðmiÞ
( LMDðmkÞ�LMDapðmkÞ�ðLMDAðmiÞÞ
1þ e�LMDðmiÞ
( ð1þ eÞLMDapðmkÞ�LMDapðmiÞ
Generally, for any kMP query, let LMDðmthreÞ be the
largest LMD value among the top-k results to be returned.
Then, in the worst case, LMDapðmthreÞ ¼ ð1þ eÞLMDðmthreÞ, so it is guaranteed that the matches with LMD
would be safely pruned by some LMDA. Hence, no exact
distance needs to be queried, if the condition below holds:
LMD�ð1þ eÞLMDapðmthreÞ ¼ ð1þ eÞ2LMDðmthreÞ:
5.2.2 Branch-level pruning
Besides computing the exact LMD of a label match, the other
factor significantly influencing the efficiency of kMP query
processing is the huge number of combinations of different
types of facilities. For a query graph GQ(VQ, EQ), there
areQ
v2VQ
ðNo: of vertex matches in G w:r:t: vÞ label matches
that can be enumerated. Clearly, this problem is especially
severe when the constraints on attributes are loose, and there
are a lot of target vertices for a vertex in the query graph. In
this subsection, we propose an effective pruning method to
reduce the number of necessary label matches to be
enumerated.
The rationale of the branch-level pruning is based on the
fact that vertices on each branch path are sorted by their
distance from the root in ascending order. Below, Lemma 2
provides a heuristic of bounding pairwise distances within
Pers Ubiquit Comput (2016) 20:413–429 421
123

two disjoint branch segments. This heuristic will lead to a
pruning rule to reduce the number of combinations. For any
two disjoint branch segments BS1 and BS2, we denote this
bound as PBbound(BS1, BS2).
Lemma 2 (pairwise branch bounding) Given two dis-
joint branch segments BS1 ¼ v1; v2; . . .; vxf g and BS2 ¼u1; u2; . . .; uyf g, BS1 \ BS1 ¼ ;; then for any distance
Distðvi; ujÞ where vi and uj belong to BS1 and BS2,
respectively, we have Distðvi; ujÞ� PB bound ðBS1;BS2Þ ¼ maxððv1:d � uy:dÞ; ðu1:d � vx:dÞÞ
Proof When ðv1:d � uy:dÞ� ðu1:d � vx:dÞ, By Defini-
tion 5, vertices in BS1 and BS2 are sequenced in ascending
order, so we have v1:d� vi:d8vi 2 BS1 ð1Þ
And uy:d� uj:d8uj 2 BS2 ð2ÞBy (1)–(2), v1:d � uy:d� vi:d � uj:d
Since for any pair of vertices, Distðvi; ujÞ�vi:d � uj:dj j � vi:d � uj:d; we have Distðvi; ujÞ� v1:d�uy:d
The case when ðv1:d � uy:dÞ\ðu1:d � vx:dÞ is sym-
metric. So the proof is completed.
Theorem 2 (branch-level pruning rule) Let best_so_far
be the upper bound of the LMD of the kth label matches
among the label matches we have seen so far. Given query
graph GQ(VQ, EQ), VQ = {v1, v2…, v|VQ|}, edge-weight
function w(.), and |VQ| disjoint branch segments {BS1,
BS2,…, BS|VQ|} such that for all i, BSi is a set of target
vertices w.r.t. vi.
For any label match m = {u1,…, u|VQ|} such that
8u 2 m; u 2S
VQ
q¼1
BSq, m can be safely pruned if holds that
X
ðvi;vjÞ2EQ
wðvi; vjÞPB bound ðBSi;BSjÞ� best so far
Running example: Now we consider query graph GQ(VQ,
EQ) where VQ = {vL, uL} EQ = {e = (vL, uL), w(e) = 1}.
As shown in Fig. 3, v is a target vertex of vL, while u1, u2,…ur, which are from the same branch segment, are target
vertices of uL. B1 and B2 are distances from the root to v and
u1, respectively. Since B2–B1[ best_so_for, the following
label matches can be pruned: {v, u1}, {v, u2}… {v, ur}.
5.3 Binary coding on range constraints
5.3.1 Binary encoding on road network
We assign each vertex a binary code representing its
facility information, which enables range constraints for
users. In this subsection, we propose a labeling-based index
method to enhance the searching capability over T corre-
sponding to the label constraints.
On the road network, we convert the information of
facility type and attributes into binary codes, with each bit
representing the ‘availability’ of one attribute value (‘1’ for
available and ‘0’ for unavailable, e.g., on attribute ‘price,’
the code of ‘500–1000’ being ‘1’ means there is a room
available priced from 500 to 1000 in this hotel). Then, each
vertex on the road network is associated with a binary
code, called the vertex’s Label. We denote the code of a
vertex v’s label value as LabelðvÞ. Specifically, for an
attribute with d domain values (e.g., for Star-level in the
example, d = 4), we assign d bits to each vertex on this
attribute. The reason for using d bits, rather than log2 d, is
that: First, one facility may fulfill multiple domain values
on one attribute, e.g., a hotel may have regular rooms
priced from ‘500–1000,’ and luxury suites priced ‘Above
3000’; second, such model enables users to have range
constraints on attributes, e.g., the star-level from ‘5-star to
3-star.’
Similarly, facility types and attributes of query graph
can be also converted into binary codes as same style as
road network. We adopt the same notation as well. How-
ever, each bit being ‘1’ on one attribute represents whether
the corresponding value is acceptable for the user. So on
attribute ‘price,’ the code of ‘500–1000’ and ‘Above 3000’
both being ‘1’ means any hotel is acceptable for the user if
there is a regular room priced from 500 to 1000 or a luxury
suite priced above 3000.
5.3.2 Determining vertex matches
Suppose there is a vertex v from the road network and a
vertex vq from the query graph, and v and vq have the same
facility types. If for each attribute, they both have one bit
being ‘1’ corresponding to the same attribute value, then
v is a vertex match of vq, according to Definition 1. As a
result, we perform an AND operation to determine whether
a vertex is a target vertex or not.
Theorem 3 (finding vertex match) For v and vq from the
road network and the query graph, respectively, when v
Fig. 3 Branch-level pruning
422 Pers Ubiquit Comput (2016) 20:413–429
123

and vq are of the same facility types, v is a vertex match
w.r.t. vq if and only if LabelðvÞ \ LabelðvqÞ[ 0~
5.4 Cost model for shortest path tree selection
In order to achieve good query performance (or high
pruning power), in this subsection, we will provide a cost
model to guide the selection of the shortest path tree in the
road network for constructing approximation distance
matrix. Our goal is to design a cost model to estimate the
query cost with respect to a specific shortest path tree, such
that we can choose a shortest path from the road network
with low query cost.
The computation of the query cost In particular, we first
give the formula of the kMP query cost below, denoted as
query_cost.
query cost ¼ Cfilter þ Ncand � ð1� PPÞ � Crefine; ð1Þ
where Cfilter is the filtering cost of using pruning methods to
filter out false alarms, Ncand is the number of candidates, PP
is the pruning power (i.e., the percentage of candidates that
are ruled out by pruning methods), and Crefine is the cost of
refining one single candidate.
For the pruning power PP, it is related to pruning powers
of match-level pruning and branch-level pruning, denoted
as PPvertex and PPbranch, respectively. Since PPvertex is
mainly constrained by the index size, the effective way to
obtain the best PPvertex value is to fully utilize the memory
space and obtain the minimal for e. Therefore, in our cost
model, we focus on the branch-level pruning and derive the
worst-case pruning power PP by underestimating it with
the branch-level pruning power PPbranch. Thus, by replac-
ing PP with PPbranch the resulting query cost in Eq. (1) is
an upper bound of the actual query cost, and our spanning
tree selection aims to minimize such a cost upper bound.
The computation of the pruning power, PPbranch To
obtain PPbranch, from the probabilistic point of view, we
can sum up the probability that each label match is pruned
by Theorem 2. That is, we have the branch-level pruning
power as follows.
PPbranch ¼ jfeje 2 E and e can be pruned by Th2gj
¼X
SE
i¼1
Pr ei can be pruned by Th2f g ð2Þ
Specifically, given a query graph GQ = (VQ, EQ), we
consider a set of edges, SE, whose edges are in a candidate
label match, i.e.,
SE¼ feðu;vÞju;v 2 V and 9eqðuq;vqÞ 2 Eqs:t: u and v
� are target vertices w:r:t: uq and vq; respectivelyg:
In other words, set SE contains edges that must be
refined, if we do not apply any pruning techniques. Then, we
define a vertex set SVi ¼ fvjv 2 Si and 8vs:t:ðv; uÞ 2 SEg,which contains vertices on the branch path Si, where Siði 2f1; 2; . . .; lgÞ is generated from decomposing the shortest
path tree. Let We be the accumulative weights of the label
match before utilizing e, which indicates that d ¼best so far �We would be the threshold for pruning e.
Let eiðu; vÞ denote an edge with one vertex from SVu
and the other from SVu. We can expand Eq. (2) and obtain:
PPbranch ¼X
SE
i¼1
Pr Distðu; rÞ � Distðv; rÞj j[ df g
¼ SEj j �X
SE
i¼1
Pr Distðu; rÞ � Distðv; rÞj j � df g
¼ SEj j �X
SE
i¼1
Prbest so far
�Distðu; rÞ � Distðv; rÞ� d
�
¼ SEj j �X
SE
i¼1
ðPrfDistðu; rÞ � Distðv; rÞ þ d� 0g
þ PrfDistðu; rÞ � Distðv; rÞ � d� 0g � 1Þð3Þ
Note that the variable best_so_far in Eq. (3) is dynami-
cally updated with the query processing. Thus,
Distðu; rÞ;Distðv; rÞ and d can be viewed as three values
generated from random variables X, Y, and R, respectively.
For Distðu; rÞ and Distðv; rÞ (i.e., variables X and Y, respec-
tively), we can collect their statistics of distances from the
root of the spanning tree. Moreover, for d (variable R), we
can obtain its distribution by collecting the value of
ðbest so far �WeÞ when an edge is pruned by branch-levelpruning. This information is available from query logs.
Without loss of generality, assume that variables X (and
Y) have mean lX (lY ) and variance rX (rY ); and variable R
has mean lR and variance rR:. Then, according to the
Central Limit Theorem (CLT), we can approximate prob-
abilities in Eq. (3) as follows.
PrfDistðu; rÞ � Distðv; rÞ þ d� 0g
¼ 1� u� lX � lY þ lRð Þffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
r2X þ r2Y þ r2Rp
!
ð4Þ
PrfDistðu; rÞ � Distðv; rÞ � d� 0g
¼ u� lX � lY � lRð Þffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
r2X þ r2Y þ r2Rp
!
: ð5Þ
Therefore, we can rewrite Eq. (3) as:
PPbranch ¼ SEj j �X
SEj j
i¼1
u� lX � lY � lRð Þffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
r2X þ r2Y þ r2Rp
!(
� u� lX � lY þ lRð Þffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
r2X þ r2Y þ r2Rp
!)
:
Pers Ubiquit Comput (2016) 20:413–429 423
123

The computation of the filtering cost, Cfilter: Next, we
consider computing the filtering cost, Cfilter; in Eq. (1). For
each edge eðu; vÞ; the comparison Distðu; rÞ � Distðv; rÞj jand d has to be conducted, and we assume the cost of such
an operation is d. According to our query processing
algorithm, such a cost would not be generated, if there
exists a target vertex on the same branch of u or v. Then,
we have:
Cfilter ¼ d �X
SEj j
i¼1
Pr9vs:t:v
R
ðSVv [ SVuÞ andv is pruned by Th2
�
: ð6Þ
We check every vertex in SVv [ SVu and then obtain the
probability as follows.
Pr 9v s:t: vZ
SVv [ SVu; v is pruned by Th2
�
¼ 1� Prf8v s:t: vZ
SVv [ SVu; v cannot be pruned by Th2g
¼ 1�Y
8 v0
R
SVv[SVu
� �
PrDistðv; rÞ � Distðv0; rÞ� d
or Distðv; rÞ � Distðv0; rÞ� d
�
Therefore, we can rewrite Eq. (6) as:
Cfilter ¼ dX
SEj j
i¼1
�Y
8 v0
R
SVv[SVu
� �
Prdistðv; rÞ � distðv0; rÞ� d
or distðv; rÞ � distðv0; rÞ� d
�
þ 1
0
B
@
1
C
A
¼ d � SEj j �X
SEj j
i¼1
Y
8 v0
R
SVv[SVu
� �
Prdistðv; rÞ � distðv0; rÞ� d
or distðv; rÞ � distðv0; rÞ� d
�
0
B
@
1
C
A
The computation of the refinement cost, Crefine: Finally,
we derive the refinement cost Crefine in Eq. (1). In partic-
ular, Crefine incurs when the exact LMD of candidate label
matches must be computed. Assuming that the computation
cost of one exact shortest path query is given by D, we
have:
Crefine ¼ D � Eq
�
�
�
� ð7Þ
where Eq
�
�
�
� is the average number of edges in the query
graph, which can be collected from statistics of the query
log.
5.5 Online query processing
5.5.1 Maintaining approximation top-k list
In this subsection, we provide the algorithm for maintain-
ing the approximation top-k list. One can see that the list
dynamically generates the pruning threshold (parameter
‘best_so_far’) for the pruning techniques.
The algorithm is illustrated as follows: The threshold is
initially set best_so_far = 0, and the records in the list are
sorted in ascendingorder, first byupper bound (denotedasub),
then by lower bound (denoted as lb). When the list contains
more than k records, we set best_so_far equal to the upper
bound of the kth record. Afterward, whenever a new label
matchm (withm.lb andm.ub) is computed, if its lower bound
is larger than best_so_far, this label match is safely pruned; if
not, we insert the record into the list and sort the list again
(binary search). If best_so_far is updated, we check the bot-
tom (list_length -k) records (i.e., the largest records) and prune
those with upper bound bigger than best_so_far.
___________________________________________________Algorithm 4 insert_top_k {
Input: a new label match m, a sorted list of k matches.Output: Ltop-k
1: if (m.lb> best_so_far)2: insert_index = binary_search (Ltop-k, m.ub,m.lb);3: insert m at list at insert_index;4: if (m.up< best_so_far)5: best_so_far= Ltop-k[k].ub ;6: for 1i ← + k to Ltop-k.length-17: if (Ltop-k[k].lb> best_so_far) 8: remove Ltop-k[k];9: end if10: end if11: end if12: else drop m }
5.5.2 kMP online query processing
The kMP query processing can be achieved by first traversing
the list of branch segments decomposed from the shortest path
tree. Since each facility of the road network is contained by
only one branch segment, the list traversal has the same time
cost as that of traversing the list of all vertices in theworst case,
that is, O(n) binary AND operations with the data encoding
technique. As a result, we can find the vertex matches within
each of the branch segments. In other words, the vertices are
associated with the branch segment they are from, and
sequenced by the same order as their branch segment. The
resulting matrix is illustrated as follows.
S1 S2 … Sl-1 Sl
Vq1 V1 V2 V3 V9 V10 V11
Vq2 V4 V5 V12 V13 V14
… … … … … …Vq|VQ| V6 V7 V8 V15 V16 V17
In this two-dimensional array, Vqi denotes the vertices of
the query graph and Sj denotes the branch segments. Clearly,
each cell (Vqi, Sj) represents a sequence of vertices of the
424 Pers Ubiquit Comput (2016) 20:413–429
123

road network, satisfying (1) the vertices are from Sj; (2) the
vertices are vertex matches w.r.t. Vqi; and (3) the sequence
itself is a branch segment according to Definition 5.
Therefore, as the second step, we traverse the 2D array
and recursively enumerate the label matches. For each
Lastly, there may be some label matches that cannot be
pruned. Thus, their exact LMDs have to be computed, in
order to obtain the final result. To compute exact LMDs,
we propose an A* search algorithm.
5.5.3 Refinement by computing exact LMD
In the case where label matches cannot be pruned with
approximate LMDs values, we apply an A* search strategy
to compute the precise values. The classical A* algorithm
for point-to-point shortest path [24] selects a number of
landmarks and precomputes their distances from every
vertex. Note that, a lower bound of the distance between
two vertices can be derived by using the triangle inequality.
However, the goodness of such a bound cannot be guar-
anteed. Therefore, we utilize the approximation bounds
derived from our branch-based index, which answers any
pairwise distance within constant time O log e�1ð Þð Þ:Similar to many classical shortest path algorithms, such
as [25], we adopt a priority queue structure and always scan
the vertex with the highest priority. For each vertex v, we
can estimate the lower bound by SP(s, v) ? SPap(v, t).lb,
and upper bound by SP(s, v) ? SPap(v, t).ub. This algo-
rithm does not require extra index and can achieve much
higher pruning power.
By Definition 3, LMD is essentially the aggregation of
|EQ| shortest distances. Therefore, the exact LMD can be
derived by repetitively compiling algorithm (A* search) for
at most |EQ| iterations. When there are more than k label
matches in the top-k list, we compute the exact LMD of the
kth record, then sort the list, and prune some of the bottom
records with the new threshold, if any. We conduct this
operation reclusively until there are only k remaining
records in the list.
6 Experimental evaluation
We use two real-world road network datasets—CA and SF
[26]. In particular, CA consists of highways and main roads
in California and SF contains detailed street networks in
San Francisco. All of the methods have been implemented
using standard C??.
Synthetic datasets (plantri and fullgen): This is a clas-
sical planar graph generator. It generates various types of
planar graphs. We utilize the ‘SPARSE6’ format, since a
road network is also generally considered as a sparse graph.
The number of vertices is set to be 100,000. This graph is
connected, and it is denoted as ‘‘PF data.’’ We generate
uniformly a number of facilities and attributes for vertices
over the network.
Real road network datasets (California Road Network
and points of interest): We adopt the dataset used in [26],
which originally has 21,048 vertices and 22,830 edges. In
particular, CA consists of highways and main roads in
California and SF contains detailed street networks in San
Francisco. There are 63 different attributes of points of
interest on edges. We modify the dataset as follows: Each
point of interest is treated as a vertex, and each edge is split
into a number of connected edges by the points of interests.
Clearly, such a modification does not change any pairwise
shortest distance among original vertices, and the topo-
logical structure remains unchanged. After the modifica-
tion, the graph has 100,357 vertices and 203,545 edges. For
each category, 5 attributes are generated, each with 5
attribute values. Then, we randomly assign these attribute
values to vertices. We denote this dataset as ‘‘CA.’’
San Francisco & North America: In order to verify
Property 1 we assumed in our model, two more real-world
datasets [26] are included for the experiment of verifica-
tion. The San Francisco dataset contains 174,956 vertices
and 223,000 edges, denoted as SF, whereas the North
America dataset contains 175,812 vertices and 179,178
edges, denoted as NA.
6.1 Verification of Property 1
In this subsection, we verify the correctness of Property 1
on real road network datasets. We randomly select a
number of shortest paths and a set of vertices, and set
e 2 ð0; 3�, and then apply Algorithm 1 to compute the
connection set on each pair of them. As the result of this
experiment from Fig. 4, we can see that the size of
Pers Ubiquit Comput (2016) 20:413–429 425
123

Fig. 4 Verification of Property 1. a CA, b SF, c NA
Fig. 5 No. of exact shortest path queries versus kMP queries. a PF, b CA
426 Pers Ubiquit Comput (2016) 20:413–429
123

connection set is independent of the length of the shortest
path, but proportional to O 1e
� �
.
6.2 Performance of match-level pruning
We first compare the effect of match-level pruning with the
baseline with LLR embedding technique. Since LLR
embedding only provides a lower bound of LMD, each
candidate is bounded by a range from the lower bound to
positive infinity. As we discussed, LLR embedding is not
able prune any candidates unless calculating at least k
exact LMDs. We report the number of pairwise shortest
path distance query (no. of exact shortest path queries) in
Fig. 5, while Fig. 6 compares the average number of
Fig. 6 Average no. of exact shortest path queries versus no. of facilities. a PF, b CA
Fig. 7 Response time versus kMP queries. a PF, b CA
Fig. 8 Average response time versus no. of facilities. a PF, b CA
Pers Ubiquit Comput (2016) 20:413–429 427
123

shortest path queries for queries with specified number of
facilities. Both results show that match-level pruning has
better performance than LLR embedding for both PF and
CA datasets. We can see that the effectiveness of match-
level pruning is only slightly influenced by the size of
query, since the pruning guarantee is determined by the
distribution of edge distances over the road network.
6.3 Performance of branch-level pruning
In this subsection, we evaluate the effectiveness of the
proposed branch-level pruning technique. In both circum-
stances (with or without branch-level pruning), match-level
pruning is applied. We report the individual query response
time and average response time for queries with a number
of facilities, in Figs. 7 and 8, respectively.
6.4 Comparison with baseline solution
In this subsection, we compare our solution with the
baseline solution. In the first comparative experiment, we
randomly generate query graphs with 2–5 facilities. The
response time of each query is reported in Fig. 9. In the
second comparison, we specify the number of facilities and
report the average response time in Fig. 10. The experi-
mental results show that our proposed method performs
significantly better than the baseline method.
7 Conclusion
In this paper, we propose a novel k-multi-preference (kMP)
query over a large road network G. To efficiently tackle the
kMP problem, we present two solutions, baseline and kMP
approaches. Specifically, for the baseline method, we
proposed a variant of classical methods for ‘‘pattern
matching’’ queries [17] with LLR embedding techniques.
For the kMP query processing approach, we applied an
approximation oracle, presented an effective two-level
pruning scheme, with branch-level and match-level prun-
ing, and illustrate an efficient query procedure to answer
kMP queries. We tested our approach through extensive
experiments to demonstrate the efficiency and effective-
ness of our proposed kMP approaches.
Acknowledgments This work was supported by NSFC Joint Fund
with Guangdong under Key Project No. U1201258, National Natural
Science Foundation of China under Grant No. 61573219, and MOE
Fig. 9 Response time versus kMP queries. a PF, b CA
Fig. 10 Average response time versus no. of facilities. a PF, b CA
428 Pers Ubiquit Comput (2016) 20:413–429
123

Project of Humanities and Social Sciences (Project Nos.
15YJAZH042, 15JDSZ20527, 15JDSZ2052).
References
1. Mouratidis K, Yiu ML, Papadias D, Mamoulis N (2006) Con-
tinuous nearest neighbor monitoring in road networks. In: Pro-
ceedings of the 32nd international conference on very large data
bases, pp 43–54
2. Yiu ML, Mamoulis N, Papadias D (2005) Aggregate nearest
neighbor queries in road networks. IEEE Trans Knowl Data Eng
17(6):820–833
3. Mouratidis K, Bakiras S, Papadias D (2006) Continuous moni-
toring of top-k queries over sliding windows. In: Proceedings of
the 2006 ACM SIGMOD international conference on manage-
ment of data, pp 635–646
4. Tao Y, Papadias D, Shen Q (2002) Continuous nearest neighbor
search. In: Proceedings of the 28th international conference on
very large databases, pp 287–298
5. Kazemi L, Shahabi C, Sharifzadeh M, Vincent L (2007) Optimal
traversal planning in road networks with navigational constraints.
GIS 19
6. Yao Bin, Xiao Xiaokui, Li Feifei, Yifan Wu (2014) Dynamic
monitoring of optimal locations in road network databases.
VLDB J 23(5):697–720
7. Zhu AD, Ma H, Xiao X, Luo S, Tang Y, Zhou S (2013) Shortest
path and distance queries on road networks: towards bridging
theory and practice. In: SIGMOD conference, pp 857–868
8. Luo S, Luo Y, Zhou S, Cong G, Guan J (2012) DISKs: a system
for distributed spatial group keyword search on road networks.
Proceedings VLDB Endow 5(12):1966–1969
9. Song R, Sun W, Zheng B, Zheng Y (2014) PRESS: a novel
framework of trajectory compression in road networks. Proc
VLDB Endow 7(9):661–672
10. Huang Y, Bastani F, Jin R, Wang XS (2014) Large scale real-
time ridesharing with service guarantee on road networks. Proc
VLDB Endow 7(14):2017–2028
11. Xu Z, Jacobsen HA (2010) Processing proximity relations in road
networks. In: Proceedings of the 2010 ACM SIGMOD interna-
tional conference on management of data, pp 243–254
12. Wu L, Xiao X, Deng D, Cong G, Zhu AD, Zhou S (2012)
Shortest path and distance queries on road networks: an experi-
mental evaluation. Proc VLDB Endow 5(5):406–417
13. Xiao X, Yao B, Li F (2011). Optimal location queries in road
network databases. In: Data engineering (ICDE), 2011 IEEE 27th
international conference, pp 804–815
14. Chou YH (1996) Exploring spatial analysis in GIS. Onword
Press, Santa Fe
15. Eppstein D, Goodrich MT (2008) Studying (non-planar) road
networks through an algorithmic lens. GIS 16
16. Gallagher B (2006) Matching structure and semantics: a survey
on graph-based pattern matching. AAAI FS 6:45–53
17. Zou L, Chen L, Ozsu MT (2009) Distance-join: pattern match
query in a large graph database. PVLDB 2(1):886–897
18. Martınez C, Valiente G (1997) An algorithm for graph pattern-
matching. In: Proceedings fourth South American workshop on
string processing, vol 8, pp 180–197
19. Cheng J, Yu JX, Ding B, Yu PS, Wang H (2008) Fast graph
pattern matching. In: Data engineering, 2008, ICDE 2008, IEEE
24th international conference, pp 913–922
20. Huang Y, Bastani F, Jin R, Wang XS (2014) Large scale real-
time ridesharing with service guarantee on road networks.
PVLDB 7(14):2017–2028
21. Shahabi C, Kolahdouzan MR, Sharifzadeh M (2003) A road
network embedding technique for K-nearest neighbor search in
moving object databases. GeoInformatica 7(3):255–273
22. Thorup M (2004) Compact oracles for reachability and approx-
imate distances in planar digraphs. J ACM 51(6):993–1024
23. Dijkstra EW (1959) A note on two problems in connexion with
graphs. Numer Math 1(1):269–271
24. Goldberg AV, Kaplan H, Werneck RF (2006) Reach for A*:
efficient point-to-point shortest path algorithms. ALENEX
129–143
25. Ahuja RK, Mehlhorn K, Orlin JB, Tarjan RE (1990) Faster
algorithms for the shortest path problem. J Assoc Comput Mach
37:213–223
26. Li F, Cheng D, Hadjieleftheriou M, Kollios G, Teng SH (2005)
On trip planning queries in spatial databases. SSTD, pp 273–290
Pers Ubiquit Comput (2016) 20:413–429 429
123


















