June 12 to 15, 2011 San Diego, CA · C4, Cantilever +/- 5 µm Camera 4 4 Rotation and alignment for...
31
June 12 to 15, 2011 San Diego, CA A New 3D Laser Bonding Process for Single Spring Attach on 300mm Probe Cards Attach on 300mm Probe Cards Jens Oesterdiekhoff, Ghassem Azdasht, Thomas Oppert, Elke Zakel, Thorsten Teutsch* Pac Tech – Packaging Technologies GmbH hl h Am Schlangenhorst 15 ‐17, Germany *Pac Tech USA – Packaging Technologies, Inc. 328 Martin Avenue, Santa Clara, CA 95050 http://www.pactech.de 328 Martin Avenue, Santa Clara, CA 95050
Transcript of June 12 to 15, 2011 San Diego, CA · C4, Cantilever +/- 5 µm Camera 4 4 Rotation and alignment for...
-
June 12 to 15, 2011San Diego, CA
A New 3D Laser Bonding Process for Single Spring Attach on 300mm Probe CardsAttach on 300mm Probe Cards
Jens Oesterdiekhoff, Ghassem Azdasht, , ,Thomas Oppert, Elke Zakel, Thorsten Teutsch*
Pac Tech – Packaging Technologies GmbHhl hAm Schlangenhorst 15 ‐17, Germany
*Pac Tech USA – Packaging Technologies, Inc.328 Martin Avenue, Santa Clara, CA 95050http://www.pactech.de 328 Martin Avenue, Santa Clara, CA 95050p // p
-
Advantage of Laser Bonding
• Localized heat –h l hno thermal stress on the areas
outside of bonding interface• Short laser pulse –
low thermal stress on chip/ psubstrate and interconnection
June 12 to 15, 2011 2IEEE SW Test Workshop
-
Thermode Bonding vs Laser Bondingg g
Heating time to bonding temperature:Laser: 0.01 - 0.2 sec ~ msecThermode: 1 – 10 sec ~ secOven Reflow: 60 – 180 sec ~ min
Laser Thermode
June 12 to 15, 2011June 12 to 15, 2011 33IEEE SW Test WorkshopIEEE SW Test Workshop
-
Temperature Control Through In Situ Laser Energy Tuning during BondingEnergy Tuning during Bonding
June 12 to 15, 2011June 12 to 15, 2011 44IEEE SW Test WorkshopIEEE SW Test Workshop
-
Compatible Substrate Materials for Laser Soldering
• Substrate– FR4, BT- Epoxy, Polyimide, Ceramic, Silicon– TG above 150 ° C– most applications: rigid
• Pad metallization– Copper coated with NiAu, Sn, Au– Thin Film : Cr/Au, NiAu, Au
June 12 to 15, 2011June 12 to 15, 2011 55IEEE SW Test WorkshopIEEE SW Test Workshop
-
Advantages of Laser Bonding for Probe Card AssemblyCard Assembly
Fle ibilit• Flexibility- layout change by software only- multiple spring designmultiple spring design- independent from substrate material
• Repair CapabilityRepair Capability- quick & local
• Customer Supportpp- quick & local
June 12 to 15, 2011 6IEEE SW Test Workshop
-
Cantilever Assembly Process FlowCantilever Design
Cantilever Manufacturing (Plating)
Cantilever Singulation (Laser Cutting)
Cantilever Inspectionp
Cantilever Sorting (into waffle packs)
S b S ld B iSubstrate Solder Bumping
Cantilever / Substrate Alignment
Cantilever Laser Bonding
Cantilever inspection (optional)
June 12 to 15, 2011 7IEEE SW Test Workshop
-
Cantilever Assembly Line for Probe Cards
Cantilever BonderSB2-Jet: Solder Jetting Cantilever Sorter
- Input: MEMS substrates- Inspection of cantilever
Laser cutting with the Laser- Solder Jetting on
ceramic substrate
- Cantilever supplied in waffle packs- Cantilever pick & rotation in vertical position- Substrate height measurement - Dual camera for x y alignment of cantilever- Laser cutting with the Laser
- Placement of cantilever in waffle packs
ceramic substrate- Solder Balls sizes:
30 – 760 µm, - Solder alloys capability:
PbSn, SnAgCu or AuSn
Dual camera for x,y alignment of cantileverto the substrate
- Probe tip z alignment - Laser bonding of cantilever- Post inspection- Cantilever rework capability
June 12 to 15, 2011June 12 to 15, 2011 88IEEE SW Test WorkshopIEEE SW Test Workshop
-
Laser Soldering SB2-Jet
June 12 to 15, 2011June 12 to 15, 2011 99IEEE SW Test WorkshopIEEE SW Test Workshop
-
Solder Ball Placement
Pictures are showing solder depots placed by SB²- jet process on substrate pads
June 12 to 15, 2011June 12 to 15, 2011 1010IEEE SW Test WorkshopIEEE SW Test Workshop
-
Cantilever Bonder Specification
- Linear axis or gantry system- Probe card sizes up to 13 inch- Full process control- Alignment control by position bonding- Placement Accuracy: down to +/- 3µm- Placement Accuracy: down to +/- 3µm
typ. +/-5µm- High power laser for bond reflow- Height control: 1µm accuracy- Cantilever thickness: 20 – 100µm- Min. Pitch: 60µm- High mechanical stability of probes- Process suitable for rework and complete card assemblyProcess suitable for rework and complete card assembly
June 12 to 15, 2011June 12 to 15, 2011 1111IEEE SW Test WorkshopIEEE SW Test Workshop
-
Cantilever Design Rules
• Hump needed for handling• Hump needed for handling and laser energy absorption– Hh ≥ 500 µm
H ≥ 500– Hw ≥ 500 µm• Tip base needed for
alignment. – Th ≥ 200 µm– Tw ≥ 200 µm
• Well defined edges are gimportant for vision system
June 12 to 15, 2011June 12 to 15, 2011 1212IEEE SW Test WorkshopIEEE SW Test Workshop
-
Fiducial Mark RecognitionFiducial Mark Recognition
• Automatic X,Y substrate alignment after loading and b d t t ti (W i )bond stage rotation (W-axis)
• Pattern recognition with bond head camera
• Alignment accuracy: +/- 1µm• High contrast simple mark
needed
d = 100 µmµ
June 12 to 15, 2011June 12 to 15, 2011 1313IEEE SW Test WorkshopIEEE SW Test Workshop
-
Substrate Height MeasurementSubstrate Height Measurement
• Continuous substrate height measurement during bond process
• Sensor: Laser scanner (+/- 0.05 µm )
• Alignment accuracy: +/- 3µm (Z-axis)
• Measurement pad 200 µm with bond pad height used
d = 200 µmµ
June 12 to 15, 2011June 12 to 15, 2011 1414IEEE SW Test WorkshopIEEE SW Test Workshop
-
Alignment SchemeAlignment Scheme
Cantilever recognition in waffle pack
Rotation and alignment for tool transferin waffle pack
• Pattern recognition of whole cantilever
for tool transfer• Pattern recognition of whole
cantilever• Detects position in waffle
pack pocket (A,B axis)• Discards defect cantilevers
• Detects transfer offsets for bond tool (B,D,Z axis)
• Discards defect cantilevers• Sensor: Camera 4 on
Pick&Flip unit• Alignment accuracy:
• Sensor: Stationary Camera 2• Alignment accuracy:
+/- 5 µm, +/- 0.5°g y+/- 5 µm
June 12 to 15, 2011June 12 to 15, 2011 1515IEEE SW Test WorkshopIEEE SW Test Workshop
-
Mechanical CorrectionMechanical Correction
• Cantilever is fitted into bond tool by touching down on a
h i l imechanical spring
June 12 to 15, 2011June 12 to 15, 2011 1616IEEE SW Test WorkshopIEEE SW Test Workshop
-
Laser Scan AlignmentLaser Scan Alignment
• A laser scanner determines– X offset for bonding– U angle correctiong– Tilt (hump bottom tip
base)
• Three scans perThree scans per measurement
• +/- 0.01 µm laser scan t bilitrepeatability
• +/- 1 µm accuracy
June 12 to 15, 2011June 12 to 15, 2011 1717IEEE SW Test WorkshopIEEE SW Test Workshop
-
Microscope Tip RecognitionMicroscope Tip Recognition
• Sensor: Side microscopeSensor: Side microscope camera 3– Y offset for bonding
Z offset for bonding– Z offset for bonding• +/- 1 µm accuracy
Edges for pattern detection
June 12 to 15, 2011June 12 to 15, 2011 1818IEEE SW Test WorkshopIEEE SW Test Workshop
-
Post Bond Hump/Tip InspectionPost Bond Hump/Tip Inspection
• Sensor: Bond head camera 1• Accuracy +/- 1 µm• Results used for smart
correction of next bond process Edges for
• Well defined edges for repeatable pattern detection needed
pattern detection
June 12 to 15, 2011June 12 to 15, 2011 1919IEEE SW Test WorkshopIEEE SW Test Workshop
-
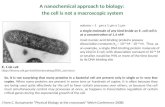
Alignment SummaryAlignment
Step Alignment procedure Corrected axis Sensor Measured featureAlignment Accuracy
1 Fiducial marks on substrate X,Y,W Bond head –Camera 1100 µm high contrast circle +/- 1 µm
2 Substrate height Z Laser Scanner -Top
200 µm diameter height measurement mark
+/- 0.05 µm (laser)+/- 3 µm (Z-axis)
3 Detect cantilever in waffle pack A,B Pick&Flip Unit -C 4 Cantilever +/- 5 µm p , Camera 4 µ
4 Rotation and alignment for tool transfer Z,B,DStationaryCamera 2 Cantilever
+/- 5 µm+/- 2°
M h i l5 Mechanical spring correction Z Mechanicalspring - -
6 Laser scan alignment X,U,Tilt Laser Scanner -Side Hump bottom and tip+/- 0.01 µm(laser), +/-1 µm(axis), +/-0.015°
7 Microscope tip recognition Y,ZMicroscope side cam -Camera 3
Cantilever Tip +/- 1 µm
8 Post bond hump/tip inspection X Y Bond head – Hump or tip +/- 1 µm8 Post bond hump/tip inspection X,Y Camera 1 Hump or tip +/- 1 µm
June 12 to 15, 2011 20IEEE SW Test Workshop
-
Alignment Summary
Ti ( hi bilit )• Tip accuracy (machine capability):– in X +/- 2 µm
in Y +/ 2 µm– in Y +/- 2 µm– in Z +/- 4 µm
June 12 to 15, 2011 21IEEE SW Test Workshop
-
Cantilever Placement Results
Picture showing Cantilever tip, placed by Laplace-3D process (80µm pitch)
June 12 to 15, 2011June 12 to 15, 2011 2222IEEE SW Test WorkshopIEEE SW Test Workshop
-
Cantilever Bonding at 60µm pitch
Cantilever Bonding at 360 degCantilever Bonding at 360 deg
June 12 to 15, 2011 23IEEE SW Test Workshop
-
Cantilever Placement Results
Pi t h i C tilPicture showing Cantilever overview, placed by Laplace-3D
process (80µm pitch)
June 12 to 15, 2011June 12 to 15, 2011 2424IEEE SW Test WorkshopIEEE SW Test Workshop
-
Process Data
X,Y Placement AccuracySummary
Min Value [mm] ‐0.0035 ‐0.0033
Max Value [mm] 0.0013 0.0021
Range [mm] ‐0.0048 ‐0.0054
StDiv [mm] 0.00101357 0.00126077
Placement Speed30μm cantilever width
10 sec per cantilever (w/o post inspection)< 15 sec per cantilever (with post inspection)30μm cantilever width,
80μm pitch 15 sec per cantilever (with post inspection)
June 12 to 15, 2011June 12 to 15, 2011 2525IEEE SW Test WorkshopIEEE SW Test Workshop
-
Laplace-Can Test Run:Cantilever Positioning AccuracyCantilever Positioning Accuracy
Positioning Accuracy Tip X Error [mm] Tip Y Error [mm]Positioning Accuracy Tip X Error [mm] Tip Y Error [mm]
Average 0,0002 0,0000Min Value -0,0033 -0,0021Max Value 0,0033 0,0026Range -0,0066 -0,0047
StDiv 0,001819 0,000970, ,
Sample: 1000 cantilever, Pitch: 100µm
-
Cantilever Bonding Video
June 12 to 15, 2011June 12 to 15, 2011 2727IEEE SW Test WorkshopIEEE SW Test Workshop
-
Cantilever Rework Video - Removal
June 12 to 15, 2011June 12 to 15, 2011 2828IEEE SW Test WorkshopIEEE SW Test Workshop
-
Cantilever Rework Video - Soldering
June 12 to 15, 2011June 12 to 15, 2011 2929IEEE SW Test WorkshopIEEE SW Test Workshop
-
Summary
• A new laser assisted sequential cantilever attach process has been presentedp
• Placement accuracies down to +/-3μm in X,Y have been demonstrated
• Assembly throughput of 10 sec per spring has been observed
• Probe springs can be assembled with free 360 deg orientation
• A fine pitch capability down to 60μm has been accomplished
• The assembly process is capable of single spring reworky p p g p g
June 12 to 15, 2011June 12 to 15, 2011 3030IEEE SW Test WorkshopIEEE SW Test Workshop
-
PAC TECH EUROPE
Contacts:
Contact Telephone Fax E-mailDr. Elke Zakel +49-3321-4495-100 +49-3321-4495-124 [email protected]
Th O t 49 3321 4495 100 49 3321 4495 610 t@ t h d
PAC TECH EUROPE
Thomas Oppert +49-3321-4495-100 +49-3321-4495-610 [email protected]
Ghassem Azdasht +49-3321-4495-100 +49-3321-4495-124 [email protected]
PAC TECH USA
Contact Telephone Fax E-mailContact Telephone Fax E mailDr. Thorsten Teutsch +1-408-588-1925 +1-408-588-1927 [email protected]
PAC TECH ASIAContact Telephone Fax E-mailSales team +60 4-6440 986 +60 4-6449 987 [email protected]
June 12 to 15, 2011June 12 to 15, 2011 3131IEEE SW Test WorkshopIEEE SW Test Workshop