
Inviscid and Viscous 2D Unsteady Flow Solvers Applied to ...
166
Applied to Inviscid and Viscous 2D Unsteady Flow Solvers ENVIRONMENTAL AND WATER RESOURCES ENGINEERING DEPARTMENT OF CIVIL ENGINEERING Austin, TX 78712 THE UNIVERSITY OF TEXAS AT AUSTIN Report No. 04-7 FPSO Hull Roll Motions Bharani Kacham O E C N A G December 2004 R O U P R E N GI N E E G N I
Transcript of Inviscid and Viscous 2D Unsteady Flow Solvers Applied to ...

Applied to
Inviscid and Viscous 2D Unsteady Flow Solvers
ENVIRONMENTAL AND WATER RESOURCES ENGINEERING
DEPARTMENT OF CIVIL ENGINEERING
Austin, TX 78712
THE UNIVERSITY OF TEXAS AT AUSTIN
Report No. 04−7
FPSO Hull Roll Motions
Bharani Kacham
O EC NA
G
December 2004
ROUP
RENGINE EGNI

Copyright
by
Bharani Kacham
2004

Inviscid and Viscous 2D Unsteady Flow SolversApplied to
FPSO Hull Roll Motions
by
Bharani Kacham, B.Tech.
Thesis
Presented to the Faculty of the Graduate School
of The University of Texas at Austin
in Partial Fulfillment
of the Requirements
for the Degree of
Master of Science in Engineering
The University of Texas at Austin
December 2004

Inviscid and Viscous 2D Unsteady Flow SolversApplied to
FPSO Hull Roll Motions
APPROVED BYSUPERVISING COMMITTEE:
Supervisor:Spyros A. Kinnas
Reader:Kamy Sepehrnoori

To family and friends

Acknowledgements
At the outset, I would like to express my gratitude to my advisor, Dr. Spyros A.
Kinnas for his unending support, encouragement and valuable advice which kept
me going for the entire duration of my masters’ program. His understanding nature
and fatherly concern are worth mentioning and thanking.
I would also like to thank Dr. Kamy Sepehrnoori for agreeing to be the reader
of my thesis in spite of his busy schedule. His comments and suggestions were of
immense help in giving this thesis a final shape.
It is with great pleasure that I mention the names of my CHL buddies; Dr.
Lee, Shreenaath, Hua, Vimal, Yi-Hsiang, Apurva, Bikash, Hong and Yumin, from
whom I have learnt a great deal. They have always been more than willing to help
and were fun to work with. Special thanks to Yi-Hsiang, without whose help the
thesis progress would have been very slow.
I am indebted to my parents and my brother Shravan for all the support and
freedom they have given me. It is very difficult not to list my friends Shilpa, Swapna,
Kranthi, Jeetain and Gopal who were of great support and strength during the in-
evitable tough times. I wish them all great health and prosperity.
Finally, I would like to thank the Offshore Technology Research Center for
providing financial support through their Cooperative Agreement with the Minerals
v

Management Service (MMS) and its Industry Consortium�
, and also the faculty of
UT for the superior quality of education they imparted.
�
Disclaimer: “The views and conclusions contained in this document are those of the authors andshould not be interpreted as representing the opinions or policies of the U.S. Government. Mention oftrade names or commercial products does not constitute their endorsement by the U.S. Government”.
vi

Inviscid and Viscous 2D Unsteady Flow Solvers
Applied to
FPSO Hull Roll Motions
by
Bharani Kacham, M.S.E.
The University of Texas at Austin, 2004
SUPERVISOR: Spyros A. Kinnas
The roll dynamics of a Floating, Production, Storage and Offloading (FPSO) hull
are of special interest in the present offshore industry. The FPSOs, while on duty
need to be stationary for long periods of time in order to enable smooth drilling and
oil transfer to the shuttle tankers. The present research is aimed at providing insights
into the effectiveness of using anti-roll appendages, like bilge keels, in mitigating
roll motion of FPSOs operating in mid-seas. Numerical modeling is a tool that
can be extensively used to simulate and investigate real ship motions. The present
work details a 2D unsteady Boundary Element Method and Navier-Stokes solver
based on Finite Volume Method and their application to modeling roll motions of
an FPSO hull. The Navier Stokes solver is a viscous solver and is advantageous
when compared to the traditional potential flow solvers due to its ability to capture
the effects of viscosity and separation past the bilge keel on the motion of the hull.
vii

The method could be applied to three dimensional hulls by using either strip theory
or by including the third dimension in the formulation.
viii

Table of Contents
Acknowledgements v
Abstract vii
List of Tables xii
List of Figures xiii
Nomenclature xix
Chapter 1. Introduction 11.1 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Objective . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.4 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Chapter 2. Literature Review 102.1 Hull Motion Prediction . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2 Vortex Tracking Method . . . . . . . . . . . . . . . . . . . . . . . . 14
Chapter 3. 2D Boundary Element Method and Its Applications 173.1 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2 Numerical Formulation . . . . . . . . . . . . . . . . . . . . . . . . 18
3.2.1 Green’s Theorem . . . . . . . . . . . . . . . . . . . . . . . . 18
3.2.2 Application of Green’s Formula for a two-dimensional body . 19
3.2.3 Numerical Implementation . . . . . . . . . . . . . . . . . . . 24
3.3 Validations of the method . . . . . . . . . . . . . . . . . . . . . . . 25
3.3.1 Prismatic cylinder of circular cross-section . . . . . . . . . . 25
3.3.2 Prismatic cylinder of elliptic cross-section . . . . . . . . . . 28
3.3.3 Prismatic cylinder of square cross-section . . . . . . . . . . . 30
ix

3.3.4 Prismatic cylinder of cross shaped cross-section . . . . . . . 33
3.4 Roll motions of a submerged body . . . . . . . . . . . . . . . . . . 35
3.4.1 Forces and added mass coefficient . . . . . . . . . . . . . . . 36
3.4.2 2D submerged hull without bilge keels . . . . . . . . . . . . 40
3.4.3 2D submerged hull with bilge keels . . . . . . . . . . . . . . 43
3.5 Oscillating hull at free surface . . . . . . . . . . . . . . . . . . . . . 44
3.5.1 Boundary Conditions . . . . . . . . . . . . . . . . . . . . . . 46
3.5.2 Numerical Implementation . . . . . . . . . . . . . . . . . . . 50
3.5.3 Time-marching . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.5.4 Forces and Hydrodynamic coefficients . . . . . . . . . . . . 53
3.6 Tip Vortex Tracking Method . . . . . . . . . . . . . . . . . . . . . . 55
3.6.1 Numerical Formulation and Implementation . . . . . . . . . 58
3.6.2 Application to flow over a foil . . . . . . . . . . . . . . . . . 60
Chapter 4. Numerical Formulation of 2D Viscous Solver 644.1 Non-dimensional governing equation . . . . . . . . . . . . . . . . . 64
4.2 Finite Volume Method . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.3 Upwind scheme . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
4.4 Time Marching . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.5 Pressure Correction Scheme . . . . . . . . . . . . . . . . . . . . . . 69
Chapter 5. Applications of 2D Navier-Stokes solver 725.1 2D Channel Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
5.2 Numerical Wavemaker . . . . . . . . . . . . . . . . . . . . . . . . . 73
5.2.1 Boundary Conditions . . . . . . . . . . . . . . . . . . . . . . 77
5.3 Heave and Roll Motions . . . . . . . . . . . . . . . . . . . . . . . . 83
5.3.1 Assumptions . . . . . . . . . . . . . . . . . . . . . . . . . . 83
5.3.2 Coordinate System and Grid details . . . . . . . . . . . . . . 83
5.3.3 Froude number and Reynolds number . . . . . . . . . . . . . 85
5.3.4 Heave Motion . . . . . . . . . . . . . . . . . . . . . . . . . 87
5.3.5 Roll Motion . . . . . . . . . . . . . . . . . . . . . . . . . . 93
5.3.6 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
5.3.7 Roll motion of a semi-circular hull . . . . . . . . . . . . . . 106
x

5.4 Submerged hull motions . . . . . . . . . . . . . . . . . . . . . . . . 107
5.4.1 Fixed coordinate system and fixed grid . . . . . . . . . . . . 107
5.4.2 Fixed coordinate system and moving grid . . . . . . . . . . . 114
5.4.3 Convergence Studies . . . . . . . . . . . . . . . . . . . . . . 120
5.4.4 Hull with bilge keels . . . . . . . . . . . . . . . . . . . . . . 124
Chapter 6. Conclusions and Recommendations 1326.1 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
6.2 Recommendations . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
Bibliography 136
Vita 143
xi

List of Tables
5.1 Comparison of roll added mass coefficients obtained from viscousand potential solvers for a submerged hull without bilge keels un-dergoing roll motion . . . . . . . . . . . . . . . . . . . . . . . . . 120
xii

List of Figures
1.1 Terra Nova FPSO (source: www.provair.com/ IcebergNet/gallery.htm) 2
1.2 Description of motion under six degrees of freedom for a ship . . . 4
3.1 Volume � confined by a surface�
. . . . . . . . . . . . . . . . . . 19
3.2 Body B and a unit source P confined in a finite domain���
. . . . . . 21
3.3 Figure showing the discretized body surface and corresponding in-dex notation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.4 An infinitely long cylinder of circular cross-section subjected to asinusoidal inflow . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.5 Comparison of analytical and numerical values of perturbation po-tential on the circle . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.6 Time history of the force on the circle in the x-direction . . . . . . . 28
3.7 An infinitely long cylinder of elliptic cross-section subjected to asinusoidal inflow . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.8 Time history of the force on the ellipse in the x-direction . . . . . . 30
3.9 An infinitely long cylinder of square cross-section subjected to rollmotion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.10 Time history of the moment on the square in the z-direction . . . . . 32
3.11 An infinitely long cylinder of cross shaped cross-section subjectedto roll motion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.12 Time history of the moment on the cross in the z-direction . . . . . 34
3.13 Figure showing cross-section of submerged hull without bilge keels 35
3.14 Figure showing cross-section of submerged hull with bilge keels . . 36
3.15 Comparison between numerical (BEM) and analytical pressure on aheaving circle at ������ ��� . . . . . . . . . . . . . . . . . . . . . . 38
3.16 Comparison between numerical (BEM) and analytical pressure on aheaving circle at ������ ��� . . . . . . . . . . . . . . . . . . . . . . 39
3.17 Geometry details and boundary conditions for a submerged hull with-out bilge keels undergoing roll motion . . . . . . . . . . . . . . . . 41
3.18 Time history of the moment on the hull without bilge keels under-going roll motion . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
xiii

3.19 Convergence of the roll added mass coefficient ����� with respect tonumber of panels on the hull (without bilge keels) surface . . . . . . 43
3.20 Error convergence plot for the roll added mass coefficient obtainedfor a submerged hull without bilge keels . . . . . . . . . . . . . . . 44
3.21 Geometry details and boundary conditions for a submerged hull withbilge keels undergoing roll motion . . . . . . . . . . . . . . . . . . 45
3.22 Time history of the moment on the hull with bilge keels undergoingroll motion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.23 Geometry details and boundary conditions for a floating hull under-going harmonic heave motion . . . . . . . . . . . . . . . . . . . . . 49
3.24 Force history for a hull undergoing heave motion for����� � �� . . 54
3.25 Comparison of heave added mass coefficients obtained from theBEM solver [Vinayan 2004] with those presented in [Newman 1977]and obtained from Euler solver [Kakar 2002] . . . . . . . . . . . . 56
3.26 Comparison of heave damping coefficients obtained from the BEMsolver [Vinayan 2004] with those presented in [Newman 1977] andobtained from Euler solver [Kakar 2002] . . . . . . . . . . . . . . . 57
3.27 A bilge keel with a trailing wake and a tip vortex . . . . . . . . . . 58
3.28 A 2D foil subjected to a uniform inflow with a lateral sinusoidal gust 61
3.29 Description of the initial wake and tip vortex geometry . . . . . . . 62
3.30 Figure showing trailing wake for a foil subject to a uniform inflowand a lateral sinusoidal gust . . . . . . . . . . . . . . . . . . . . . . 62
3.31 Vorticity being shed tangentially into the shear layer . . . . . . . . 63
3.32 Time history of the lift force on the foil . . . . . . . . . . . . . . . 63
4.1 Geometry details of the cell based scheme . . . . . . . . . . . . . . 67
5.1 Description of the boundary conditions applied for a 2D channel flow 74
5.2 The velocity and pressure contours for the fully developed flow in a2D channel obtained from the viscous solver . . . . . . . . . . . . . 75
5.3 Comparison of horizontal velocity profile obtained from the viscoussolver at the outflow boundary with analytical solution . . . . . . . 76
5.4 Description of the boundary conditions applied for a numerical wave-maker . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
5.5 Pressure contours under a wave and the corresponding wave eleva-tion at �� � ��� . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
5.6 Pressure contours under a wave and the corresponding wave eleva-tion at �� � ���� . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
xiv

5.7 Depiction of coordinate system and domain for a floating body un-dergoing harmonic motions . . . . . . . . . . . . . . . . . . . . . . 85
5.8 Grid details for a rectangular hull without bilge keels . . . . . . . . 86
5.9 Grid details for a rectangular hull without bilge keels . . . . . . . . 86
5.10 Comparison of hydrodynamic coefficients for a 2D hull undergoingheave motion obtained from the present solver with those measuredby Vugts [1968] as given in [Newman 1977] and Euler solver [Kakar2002] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
5.11 Force history for a heaving rectangular hull over one time period andfor
��� � � �� . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
5.12 Pressure contours at different time steps for a 2D rectangular hullundergoing heave motion . . . . . . . . . . . . . . . . . . . . . . . 91
5.13 Wave profiles at different time steps for a 2D rectangular hull under-going heave motion . . . . . . . . . . . . . . . . . . . . . . . . . . 92
5.14 Bilge and keel geometry details . . . . . . . . . . . . . . . . . . . . 94
5.15 Boundary conditions applied for a body undergoing forced harmonicroll motion at the free surface . . . . . . . . . . . . . . . . . . . . . 95
5.16 Figure explaining how to evaluate roll added mass and damping co-efficients from the moment history plot itself . . . . . . . . . . . . . 97
5.17 Moment history of a hull without bilge keels undergoing harmonicroll motions for
��� � = 0.8 . . . . . . . . . . . . . . . . . . . . . . 98
5.18 Pressure contour plots at various time instants for a hull withoutbilge keels undergoing roll motion . . . . . . . . . . . . . . . . . . 99
5.19 Comparison of roll added mass coefficients from the present solverwith those obtained from the BEM solver, the Euler solver [Kakar2002] and Vugts [1968] for a hull without bilge keels . . . . . . . . 100
5.20 Comparison of roll damping coefficients from the present solverwith those obtained from the BEM solver, the Euler solver [Kakar2002] and Vugts [1968] for a hull without bilge keels . . . . . . . . 100
5.21 Wave profiles at various time instants for a hull without bilge keelsundergoing roll motion . . . . . . . . . . . . . . . . . . . . . . . . 101
5.22 Moment history of a hull with 4�
bilge keels undergoing harmonicroll motions for
��� � = 0.8 . . . . . . . . . . . . . . . . . . . . . . 102
5.23 Comparison of roll added mass coefficients from the present solverwith those obtained from the BEM solver, the Euler solver [Kakar2002] and Yeung et al. [2000] for a hull with 4
�bilge keels . . . . 103
5.24 Comparison of roll damping coefficients from the present solverwith those obtained from the BEM solver, the Euler solver [Kakar2002] and Yeung et al. [2000] for a hull with 4
�bilge keels . . . . 103
xv

5.25 Wave profiles at various time instants for a hull with 4�
bilge keelsundergoing roll motion; The vertical axis represents the wave eleva-tion, � scaled by the beam length, � . . . . . . . . . . . . . . . . . 104
5.26 Pressure on the hull with 4�
bilge keels for� � � = 0.8 at �� = 0.8
(The discrepancies between the pressures from the current viscous solverand other solvers shown in the figure led to investigation and changes in theformulation of the solver, which are presented in the succeeding sectionsof the chapter.) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
5.27 A close-up view of the grid near the semi-circular hull . . . . . . . 108
5.28 Plot of pressure on the semi-circular hull ��� curve length at varioustime instants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
5.29 Description of the main length parameters for a submerged hull un-dergoing roll motions . . . . . . . . . . . . . . . . . . . . . . . . . 109
5.30 a typical grid used for forced harmonic motions of a submerged hull 110
5.31 Description of boundary conditions applied for the submerged rollproblem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
5.32 Pressure on the submerged hull without bilge keels at �� � � � for anon-moving grid . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
5.33 Pressure on the submerged hull without bilge keels at �� � � � � fora non-moving grid . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
5.34 Pressure contours around the submerged hull without bilge keels at�� � � � for a non-moving grid . . . . . . . . . . . . . . . . . . . . 113
5.35 Pressure contours around the submerged hull without bilge keels at�� � � � for a non-moving grid . . . . . . . . . . . . . . . . . . . . 114
5.36 Figure explaining the terms used in transformation of the unsteadyterm in the Navier-Stokes equations for a moving grid in a fixedinertial coordinate system . . . . . . . . . . . . . . . . . . . . . . . 116
5.37 Grid orientation for a submerged hull without bilge keels at �� �� �and �� � � � � . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
5.38 Pressure evaluated on the submerged hull without bilge keels at �� �� � using a fixed coordinate system and a moving grid in the case ofviscous solver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
5.39 Pressure evaluated on the submerged hull without bilge keels at ����� � � using a fixed coordinate system and a moving grid in the caseof viscous solver . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
5.40 Pressure contours around the submerged hull without bilge keels at�� � � � . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
xvi

5.41 Pressure contours around the submerged hull without bilge keels at�� � � � � . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
5.42 Comparison between hydrodynamic moment obtained from viscousand potential solvers for a submerged hull without bilge keels un-dergoing roll motion . . . . . . . . . . . . . . . . . . . . . . . . . 121
5.43 Flow field with respect to the submerged moving hull without bilgekeels, shown around the hull at time instant � �� . . . . . . . . . . 121
5.44 Flow field with respect to the submerged moving hull without bilgekeels, shown around the hull at time instant � ��� ��� . . . . . . . . 122
5.45 Flow field with respect to the submerged moving hull without bilgekeels, shown around the hull at time instant � ��� ��� . . . . . . . . 122
5.46 Flow field with respect to the submerged moving hull without bilgekeels, shown around the hull at time instant � ������� . . . . . . . . 123
5.47 Comparison of the grid densities around the submerged hull withoutbilge keels used in the convergence study . . . . . . . . . . . . . . 125
5.48 Comparison of the pressure on the submerged hull without bilgekeels for increasing number of cells at �� � �� � ��� . . . . . . . . . . 126
5.49 Comparison of the pressure on the submerged hull without bilgekeels for increasing number of cells at �� � �� ��� � . . . . . . . . . . 126
5.50 Comparison of the pressure on the submerged hull without bilgekeels for increasing number of cells at �� � ���� � � . . . . . . . . . . 127
5.51 Comparison of the hydrodynamic moment on the submerged hullwithout bilge keels between three different grids for the first timeperiod . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
5.52 a typical grid used for computation of forced harmonic motions of asubmerged hull with bilge keels . . . . . . . . . . . . . . . . . . . 128
5.53 Comparison of the pressure on the submerged hull with bilge keelsundergoing roll motion for varying Reynolds number at �� � �� ��� . 128
5.54 Comparison of the pressure on the submerged hull with bilge keelsundergoing roll motion for varying Reynolds number at �� � �� ��� . 129
5.55 Comparison of the pressure on the submerged hull with bilge keelsundergoing roll motion for varying Reynolds number at �� � ��� . 129
5.56 Comparison of the pressure on the submerged hull with bilge keelsundergoing roll motion between viscous and potential solvers at�� � �� � � . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
5.57 Comparison of the pressure on the submerged hull with bilge keelsundergoing roll motion between viscous and potential solvers at�� � �� ��� . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
xvii

5.58 Comparison of the hydrodynamic moment on the submerged hullwith bilge keels undergoing roll motion between viscous and poten-tial solvers for the first time period . . . . . . . . . . . . . . . . . . 131
xviii

Nomenclature
Latin Symbols
� wave amplitude
����� added-mass coefficient� ��� damping coefficient
� beam of the ship� wave celerity, � � � ����� (in deep water)�
water depth�propeller diameter,
� � ��� , or
draft of the ship�� � � ����������������� , body force per unit mass
F column matrix for the derivative terms���
Froude number based on propeller diameter�
,��� �"!$#
�����&%
Froude number based on beam � ,� �'% �)( � % �
��� �Froude number based on draft
�,��� � �*( �
� �� ��� � �
non-dimensionalized total - and + -direction force, gravitational acceleration
G column matrix for the + derivative terms
xix

�wave number,
� � �� ��
Keulegan-Carpenter number� �
non-dimensional bilge-keel depth�
reference length used in non-dimensionalization, or
wavelength, or length of 2-D channel���
deep-water wavelength� �
moment about the � axis�� � � � � � � ��� � ��� , normal vector� pressure���� atmospheric pressure�� � � � � � � � � , body velocity
Q column matrix containing the source terms ��
residual of the continuity equation
��� Reynolds number based on reference length�
, ��� ��������
�� ��� area of cell in two-dimensional formulation
� non-dimensional time�
time period of motion
U column matrix for time derivative terms���
flow velocity at infinity� amplitude of oscillating velocity function
���amplitude of heave velocity
� � � � � � + and � -direction velocities�� � � � � � � � � , total velocity vector!#"
ship speed$% �computational cell volume� � � � + � � � , location vector on the ship fixed
coordinate system
� � + � � � downstream, upward and port side coordinates respectively
xx

Greek Symbols� angle of roll for FPSO hull, � � � �
� � � ( �� � amplitude of roll motion� � pressure difference�
� time step size
� � � � + � cell size in and + direction
� vertical coordinate of free surface� dynamic viscosity of water
� kinematic viscosity of water
( frequency of periodic heave and roll forcing function�( � � ( ��� ( ��� ( ��� , vorticity vector���
perturbation potential� fluid density�
phase of the wave,� � � ( �
Subscripts
� � ��� � � � node numbers �
���� � � � cell indices
� � ����� � � node or cell indices in each direction;�
is axial,�
is radial, and�
is circumferential.� ��� � � ���
face (in two-dimensions) indices
at north, west, south and east of a cell
xxi

Superscripts� intermediate velocity or pressure�
velocity or pressure correction� � ��� time step indices
Acronyms
BEM Boundary Element Method
CFD Computational Fluid Dynamics
CPU Central Processing Unit (time)
FPSO Floating, Production, Storage and Offloading (vessels)
FVM Finite Volume Method
MIT Massachusetts Institute of Technology
RANS Reynolds Averaged Navier-Stokes (equations)
SIMPLE Semi-Implicit Method for Pressure Linked Equations
Computer Program Names
FLUENT commercial CFD software
WAMIT panel method based wave-structure interaction analyzer
xxii

Chapter 1
Introduction
1.1 Background
Oil in various forms has become an indispensable commodity in present day lives.
The oil basins or reserves in shallow waters have long been dried up or reduced to
non-profitable resources. The ever increasing demand for oil has forced explorers
to look towards deeper seas for newer and better opportunities. Deeper seas were
explored as early as 1950s. But, exploring, drilling and production in deeper seas
are not without their share of problems. It is an arduous and expensive task to set up
drilling and production units in deep seas mainly due to the depth of the sea bed and
the prevailing harsh environmental conditions.
The option of fixed structures is hence limited in deep waters. The best and obvious
alternative for this purpose is the use of floating structures. Floating structures are
used in all fields of marine technology, particularly in exploration work. Typical
floating structures used for offshore operations are semi-submersibles and drill ships.
Semi-submersibles are mainly floating drilling platforms which use pontoons and
columns flooded with sea water to stay afloat. Floating, Production, Storage and
Offloading (FPSO) vessels and Floating, Storage and Offloading (FSO) vessels are
the common drilling vessels. FPSO vessels are nowadays extensively being used
1

for oil extraction. Both FPSOs and Semi-submersibles are usually anchored with
mooring lines which in some cases can be assisted by dynamic positioning thrusters.
A typical FPSO operating in mid-seas is shown in figure 1.1.
Figure 1.1: Terra Nova FPSO (source: www.provair.com/ IcebergNet/gallery.htm)
1.2 Motivation
Floating structures, together with moorings, risers and other equipment can be con-
sidered as a single system. Such systems usually have a low stiffness and hence have
a low natural frequency. This in turn can cause the ship to move in all six degrees
of freedom when the structure is subject to three-dimensional loads due to various
factors like random waves, currents and winds. The translatory motions that occur
along the three axes and the rotational motions that occur about the axes form the
six degrees of motion. Translatory motions along the X-, Y- and Z-axes are called
surge, sway and heave respectively. The three rotational motions in the same order
2

are roll, pitch and yaw respectively. The six degrees of freedom are depicted in figure
1.2. One can represent the energy carried by the waves as an area of spectral den-
sity in the frequency domain. From the wave energy spectrum one can observe that
the energy intensive range of the spectrum is concentrated in the low frequencies.
Hence, resonance phenomenon can be very problematical for floating structures as
their natural frequency is low. Of the possible motions, pitch, roll and heave are
significant and need to be studied carefully. The prime origin of roll motions of FP-
SOs’ is the non-collinearity of wind, current, wind driven seas and swell. In storm
conditions the wind driven seas are normally collinear with the wind and dominant
over currents. Therefore, in extreme conditions FPSOs usually encounter seas and
wind head on or at a small angle. It should be noted that the wind driven seas exhibit
a directional spreading and that the FPSOs oscillate around the mean heading at the
same time. Both the phenomena contribute to transverse wave loading, sway, yaw
and roll motions. Swells originating from remote storms may arrive from the beam
direction. In cases where the currents govern the heading of the vessel, vessels have
to cope with the onslaught of beam seas. Other sources of transverse excitation are
the variations in wind direction and current direction. During wind shifts or change
of wind direction or tidal change of current, the FPSO may turn and experience bow
quartering or beam waves for a certain period. The main focus of the present work
is roll motion because the possibility of extremely large motions and even capsizing
make roll one of the most critical aspects of ship motions and sea keeping.
The FPSOs that are operating in deep waters need to be stationary for long periods
of time in order to facilitate smooth drilling operations. Hence, the mitigation of roll
motion acquires significant importance and needs to be studied extensively. The roll
motion plays an important role in determining the loads on deck cargo of an offshore
3

Figure 1.2: Description of motion under six degrees of freedom for a ship
vessel. The range of operability of the ship also can be predicted accurately if the
roll motion near resonance can be estimated correctly. Field observations indicate
that FPSOs roll more than expected based on their design and model tests. This can
lead to riser fatigue, loads on mooring system, turntable and turret and operational
difficulties (degraded process performance, operational limits on material transfer,
helicopter operations, crew comfort and safety and effectiveness). FPSOs consist of
both ballast tanks and cargo tanks which have a free surface at all times. Cargo tanks
are basically used to store oil till the oil shuttle tankers make their trip. Sloshing in
these tanks could pose a major problem due to roll motions at resonance. Hence, it
becomes imperative that roll motions be avoided as much as possible for the FPSOs.
Many types of devices and methods have been designed by sailors and naval archi-
tects to reduce the roll motions. The means to control the roll motion can be divided
into the following groups:
4

� Hull design (main dimensions, distribution of displacement, cross section
shape);
� Passive devices such as bilge keels, skegs and fins;
� Active systems based on moving weights and stabilizer fins;
� Active and passive anti-rolling tanks;
� Rudder-roll control and heading control;
In hull design, distribution of displacement mainly involves distributing the weight
on to either side of the vessel away from the centreline. Making the topside of the
vessel lighter also helps in increased stability by lowering the center of gravity, min-
imizing the moment of inertia and thus reducing the roll moments. But this approach
might not be feasible for an FPSO which houses a drilling unit on its deck. Accord-
ing to [Kasten 2002], active stabilizers can cause up to 90�
roll reduction but they
are most effective only when the ship is moving at its maximum speed. Stabilizer
fins and rudder-roll control are based on lift force generation with forward speed and
therefore not applicable for stationary vessels such as FPSOs. They are also rela-
tively expensive and complex to install. Using anti-roll tanks, roll reductions in both
amplitude and acceleration to the order of 50�
to 60�
have been possible. Vessel
speed is not an issue in this case. The main disadvantage is the added displacement
required to carry the extra deadweight of the tank contents. Space provision for anti-
roll tanks can lead to compromises in spaces for interior and storage. Another major
disadvantage is the possible effects on stability of the vessel due to the large free
surface effect in the tank. Orienting the ship into the wave direction using thrusters
5

is one desirable way of reducing ship motions, but, in rough weather the waves are
random both in direction and individual characteristics.
Bilge keels are appendages that form an obstruction to roll motion. A bilge keel
generally runs over the midship portion of the hull, perpendicular to the turn of the
bilge. According to [Kasten 2002], for sailing vessels, long, low aspect ratio bilge
keels offer roll reduction of the order of 35�
to 55�
and their efficacy is independent
of the vessel speed. There is some added frictional resistance due to increased wetted
surface area. Bilge keels are relatively inexpensive and also simple to build and are
hence widely preferred. They also have the advantage of having no moving parts
and require no more maintenance than that devoted to the hull surface. Properly
designed bilge keels create minimal drag and increase roll period while reducing
roll amplitude. The effectiveness of using bilge keels in FPSO hull roll mitigations
needs to be studied and hence, is the main focus of this thesis.
Accuracy in the prediction of ship motions under extreme conditions and the re-
sulting hydrodynamic loads is of great importance to the ship design process and
is a challenging task. Accurate predictions of the motion are also necessary for
the development of control methods. Early predictions of the ship motions were
based on scale model tests in given wave conditions in wave basins. Though these
tests yield fairly good results, it is cumbersome and expensive to model these tests.
These model tests are still being used, but, are limited by the time and efforts taken
in conducting them. The scale effects also pose a substantial problem in the ex-
periments. It is usually difficult for researchers to get a good correlation between
Reynolds number and Froude number for models of practical hull forms. In con-
trast, theoretical and numerical methods offer greater ease of use and are relatively
6

very inexpensive. A number of techniques were developed for the estimation of the
roll damping moment. Among these are empirical and semi-empirical formulae that
are derived from experimental data. Two types of experiments are generally used
for the estimation of roll damping; free decay and forced roll tests. Development
of numerical methods made ship motion prediction easier and faster. Continuous
advancements in technology has only helped increase the usage and effectiveness
of these numerical methods. Most of the numerical methods till now have been
potential based methods due to the simplicity in modeling the problem and cost ef-
fectiveness in terms of computer time and storage. The lack of proper computational
methods for prediction of ship motions also arose mainly due to the complexity of
the problem and limited knowledge of the actual governing physics. The main cause
of roll damping in the case of a hull, fitted with bilge keels, is the vortex created due
to the separated flow past the bilge keels in addition to the outwardly radiating free
surface waves. Accurately modeling the complex flow around the bilge keels in the
presence of the hull geometry and a free surface acquires great importance in the
process of determining the effectiveness of the bilge keels in roll attenuation.
There are existing potential solvers such as WAMIT (Waves at MIT)�
which are used
to determine the hydrodynamic coefficients; added mass and damping coefficients
for ships undergoing motions under six degrees of freedom. Potential solvers have
been proved fairly accurate in predictions of heave and sway motions. But, potential
solvers fail to predict the roll motion accurately because the flow around the hull
can neither be assumed to be inviscid nor irrotational in the roll case. Viscous ef-
fects dominate and separation of flow past sharp edges play a major role when a ship
�
WAMIT is a registered trademark of WAMIT, Inc. (www.wamit.com)
7

is undergoing roll motion, but, potential solvers can solve only for attached flows.
Hence, there arises a need for solvers which can take into account viscous and sep-
aration effects and predict the flow accurately. A Reynolds Averaged Navier-Stokes
(RANS)�
solver provides a good alternative to potential solvers. The whole motion
problem can be split up into the sum of harmonic oscillations of the ship in still wa-
ter and waves coming in on the restrained ship and the two fields can be investigated
entirely separately [Vugts, 1968]. In this thesis, the aim is to deal with the harmonic
oscillations of the ship hull. For all practical purposes the problem can be assumed
to be two-dimensional and solved for a general rectangular cross-section of a hull.
Strip theory then can be used to integrate the solutions of all the cross-sections along
the ship’s length and an approximate 3D solution can be obtained.
1.3 Objective
The objective of the work presented in this thesis is to develop and validate a two-
dimensional Navier-Stokes solver to solve the problem of radiation due to the roll
motions of a 2D FPSO hull at the free surface. Hulls with and without bilge keels
are considered. The free surface effects and the viscous effects are decoupled and
studied separately to get a better understanding of both phenomena. The present
method aims at capturing the separated flow and the radiated wave profile and at
predicting the roll hydrodynamic coefficients. The ultimate objective of the present
work is to develop a 3D solver which can simulate roll motions of 3D ship hulls.
�
In the present work, investigations have shown that the solution is not affected much by a changein the Reynolds number and hence, the present solver is based on laminar flow alone.
8

1.4 Overview
� Chapter 2 presents a literature review of the past work done on the prediction
of hull motions using various schemes. Also, a brief review of vortex tracking
methods is given.
� Chapter 3 discusses the detailed formulation of the boundary element method.
The chapter then presents results for various applications of the method. Com-
parisons with existing solutions and convergence studies are provided. It also
provides a brief outline of the vortex tracking method.
� Chapter 4 describes the numerical formulation of 2D unsteady Navier-Stokes
solver. The Crank-Nicolson scheme and SIMPLE pressure correction method
are explained.
� Chapter 5 presents the application of the 2D finite volume method to the prob-
lem of a floating hull undergoing forced harmonic motions. It presents the
comparisons between the present solver results and results from theory or ex-
periments. It also presents the formulation and results for the problem of
submerged body undergoing forced harmonic motions.
� Chapter 6 includes conclusions on the present work done and recommenda-
tions for the work to be done in the future.�
�
A copy of this thesis may also be downloaded from the following website:http://cavity.ce.utexas.edu/kinnas/oetheses.html
9

Chapter 2
Literature Review
This chapter reviews literature related to different methods and approaches to study
the roll motion of hull forms. The first section discusses previous literature which
deals with the problem of 2D and 3D hull forms undergoing roll motions in the
presence as well as the absence of a free surface. The second section discusses
literature that deals with vortex tracking methods based on potential theory.
2.1 Hull Motion Prediction
Prediction of roll motion is very important in ship dynamics and has interested re-
searchers for long. Most of the currently available techniques for the analysis of
ship motions and sea loads are based on potential flow assumptions. These potential
solvers have proven adequate in the analysis of sway, pitch and heave motions. But,
these solvers fail to predict roll motion accurately due to their fundamental assump-
tion of irrotationality and absence of viscous effects. Vugts [1968] was probably one
of the first to do a comprehensive study of ship motions and observe the importance
of viscous effects in the case of rolling bodies. Yeung et al. [1996] states that viscous
effects are known to have significant influence on hydrodynamic forces on bluff-
10

shape bodies. Ocean structures in long waves and roll damping arising from bilges
of a ship hull are important example. In the potential methods viscous effects may
be accounted for by empirical, semi-empirical formulations (Tanaka [1960], Ikeda
et al. [1977], Himeno [1981]). The empirical and semi-empirical formulations de-
pend mostly on various model tests and are hence used only on a trial and error basis.
They are also incapable of dealing with motions of bodies with complex geometries.
Another component of damping is the free surface waves which are well predicted
by potential theory. There have been efforts by Fink and Soh [1974], Brown and Pa-
tel [1985], Braathen and Faltinsen [1988a], Cozens [1987] and Downie et al. [1974]
to predict viscous damping without relying on empiricism. But, none of them were
able to model accurately the interaction of hull geometry, vorticity generation and
free surface simultaneously until Yeung and Vaidhyanathan [1994] who developed a
Free-Surface Random Vortex Method . On the other hand, a RANS equations based
technique, naturally incorporates the effect of viscosity and hence, produces better
results in cases where viscosity plays an important role [Sarkar and Vassalos 2000].
They can easily be extended to 3D practical ship forms and the creation of vorticity
in the boundary layer and vortex shedding during separation can be readily tackled.
Among the available techniques to predict vessel motions, the strip theory based
”Seakeeper”�
, or the panel method diffraction codes such as WAMIT (Waves at
MIT) assume inviscid flow and operate in the frequency domain. Klaka [2001]
observes that viscous forces are important and the non-linear nature of roll response
requires time domain modeling. According to Gentaz et al. [1997], viscous effects
are important for rectangular bodies in sway or roll motion. Therefore numerical
�
developed by Formation Design Systems Pvt. Ltd
11

simulations based on inviscid flow theory cannot give satisfactory results. It has
been shown in Yeung and Ananthakrishnan [1992] that for strongly separated flow,
the shear stress is of secondary importance. This is illustrated in Kakar [2002] and
Kinnas et al. [2003], where the flow past a flat plate is determined using both an
Euler and a Navier-Stokes solver. The values of the drag and inertia coefficients
from both the solvers compare very well with each other as well as with experiments
(experimental data presented in Sarpkaya and O’Keefe [1995]).
Some of the past work done on the subject of roll motions includes an investigation
into the eddy-making damping in slow-drift motions performed by Faltinsen and
Sortland [1987]. The authors showed the importance of bilge-keel depth, especially
for low Keulegan-Carpenter numbers. [Sarpkaya, 1995] presented experimental re-
sults for two- and three-dimensional bilge keels subject to an oscillating flow. The
authors conclude that bilge keel damping is affected by the vortex shedding from
the edge of the bilge keel and the use of damping coefficients from flat plates in a
free stream are not necessarily accurate for wall bounded bilge keels. Korpus and
Falzarano [1997] were the one of the first researchers to use a RANS solver to tackle
the problem of ship roll motion. Their work aimed at studying the viscous and vor-
tical flows around the hull corners and appendages in the absence of a free surface.
They performed a series of parametric studies in order to identify the individual
contributions of viscosity, vorticity, and pressure.
Yeung et al. [1998] applied the Free-Surface Random Vortex Method (FSRVM) to
a rectangular ship-like section oscillating in roll motion and compared the hydro-
dynamic coefficients obtained from the method with those obtained from their ex-
periments. Their study shows that the added mass coefficients are not affected by
12

further increase in the amplitude of roll beyond five degrees. A composite model
representing the effect of flow separation on the hydrodynamic moment is also de-
veloped. The moment is expressed as the sum of the added mass inertia, a linear
damping associated with surface wave generation and a quadratic damping associ-
ated with vortex generation. In Yeung et al. [2000], the authors extended the work
to include modeling of the complex flow around the bilge keels. In the FSRVM, the
flow-field is solved by decomposing it into irrotational and vortical parts. The irro-
tational part is solved using a complex-valued boundary-integral method, utilizing
Cauchy’s integral theorem for a region bounded by the body, the free surface and
the open boundary. The rotational part is solved by solving the vorticity equation
using the fractional step method. Results obtained using the solver are compared
to experimental data as well as results obtained by Alessandrini and Delhommeau
[1995] for various bilge keel depths and forcing function amplitudes. The increase
in size of the keels increased the added inertia and the damping coefficients.
Miller et al. [2002] was one of the first to use three-dimensional RANS calculations
to simulate roll motions of a circular cylinder with bilge keels. The numerical results
are compared with experiments performed at the Circulating Water Channel at the
Naval Surface Warfare Center, Carderock Division. The results compared well for
immersed body computations but emerged body results need to be improved further.
These calculations demonstrate that RANS can play an important role in variety of
hull motions in the near future. At the same time Wilson and Stern [2002] presented
results for unsteady simulation of a surface combatant under roll motion. Though the
authors did not have experimental data to validate their results, their efforts showed
the efficacy of a RANS solver in naval architecture applications. Other works in this
area include Sturova and Motygin [2002], where the authors solve, using a multi pole
13

expansion method, a system of boundary integral equations describing the linear
two-dimensional water-wave problem, for a horizontal cylinder undergoing small
oscillations at the interface of two layers of different densities.
Most recently, Felli et al. [2004] conducted free decay roll experiments on a DDG551
ship model with forward sped at the INSEAN facility in order to study the 3D flow
field around the hull. The flow field is resolved in phase with the roll motion using
Laser Doppler Velocimetry (LDV). The study is performed for a bare hull as well as
a fully appended hull (rudder, brackets and bilge keels). Bilge keels are found to be
the major contributors towards roll damping. The authors observe that LDV results
could be improved significantly by using Particle Image Velocimetry (PIV). Bishop
et al. [2004] conducted experiments at the Naval Surface Warfare Center, Carderock
Division to explore the viscous flow field in the region of the bilge keels while the
ship is undergoing roll motions.The model used in the experiments is DTMB model�
5415. Irvine et al. [2004] also conducted towing tank experiments for an advanc-
ing surface combatant (DTMB model 5512) in free roll decay. For free roll decay
experiments, results are presented for all motions under all the six degrees of free-
dom. All the studies conclude that with increasing forward speed, the roll damping
increases. This is attributed to the lift effect caused by the bilge keels. These stud-
ies could be useful for validation tests when the present solver is made capable of
handling 3D flows.
2.2 Vortex Tracking Method
This section does a review of some of the past work done in the field of prediction
and tracking of vortices that are shed from edges using inviscid flow theory. Rott
14

[1956] was one of the first among to consider the effects of viscous separation and
include it into calculations of fluid flow past sharp edges. In the problem of diffrac-
tion of shock waves he modeled the separation of flow by replacing the vortex region
by a single concentrated vortex. Assuming that the flow was irrotational, he argued
that neglecting viscosity would cause only a small deviation from real flow pattern
and solved the problem using dimensional analysis.
Researchers later tried to study problems involving unsteady motion of 2D vortex
sheets past wedges. According to Pullin [1978], the appropriate similarity law for
the wedge starting flow appears to have been originally discovered by Prandtl. Fink
and Soh [1974] later made an attempt to model impulsive flat-plate (zero wedge an-
gle) flow by a finite number of point vortices whose initial strengths and positions
represent a discretized model of the disturbed sheet circulation. Pullin [1978] ap-
plied a model consisting of a vortex sheet, a cut and an isolated vortex developed
by Smith [1968] to the impulsive starting flow past an infinite wedge. In Pullin
[1978] a similarity solution is used to transform the time-dependent problem for the
sheet motion into an integro-differential equation and finite difference solutions to
the same are obtained.
Two-dimensional methods based on a discrete vortex approach were used by Clements
and Maull [1975] and Bearman and Graham [1980] to model vortex sheets. These
methods were later applied to the problem of prediction of ship roll damping by
Standing et al. [1988] based on the method developed by Bearman et al. [1982] and
Cozens [1987]. Later this method was extended to three-dimensions and applied to
ship roll damping problem by Downie et al. [1991]. Graham and Cozens [1988]
adapted the Cloud-in-cell method (Christiansen [1973]) to model the vortex sheet
15

which is shed and rolls up from a single sharp edge. The method is a mesh method
in which a discrete moving point vortex representation of the vorticity field is trans-
ferred to a fixed mesh. Numerical approximation to the velocity field is carried out
on the mesh and transferred back to the moving points as a convection velocity.
Another approach used in modeling vortex sheets was developed by Faltinsen and
Pettersen [1987]. It was based on distributing sources and dipoles over boundaries
and free shear layers. It was applied for oscillating flow over bodies with either
curved surfaces or sharp edges. It was later extended to include the free surface
effects and applied to a 2D floating body with sharp as well as round corners under-
going forced harmonic roll motion by Braathen and Faltinsen [1988b].
16

Chapter 3
2D Boundary Element Method and Its Applications
In this chapter, the first section presents the Boundary Element Method (BEM) or the
Panel Method and its detailed formulation in two dimensions. Next, its application
to a few standard problems are presented for validation purposes. A problem of a
submerged hull undergoing forced harmonic roll motions is solved. The method
is extended to include trailing vortex prediction for flow past a bilge keel (wedge).
The ultimate objective of the present work with 2D BEM is to be able to predict the
vortex shedding past a bilge keel for a 2D hull section thats rolling at a free surface.
The motivation for using BEM is that it requires less computational time and storage
to solve a problem when compared to viscous solvers.
3.1 Background
Boundary Element Method is based on integral equations. Boundary value prob-
lems can be represented mathematically in terms of integral equations by transform-
ing the governing partial differential equations into integral equations relating only
boundary values. The integral representation of a problem relates the main variables
(velocity potential in fluid flows, temperature in heat transfer problems, etc) with
17

functions of their derivatives (velocities and heat flux respectively).
The advantages of using BEM are:
1) Only boundaries need to be discretized, hence, minimal computational storage
and time are used
2) Problems involving infinite or semi-infinite domains can be easily solved since
the boundaries at infinity need not be created
3) Problems involving some kind of singularity or discontinuity can be dealt with
effectively
4) One need not perform any discretization in the plane of symmetry in case of
problems involving symmetry
3.2 Numerical Formulation
This section presents the numerical formulation and implementation of 2D Bound-
ary Element Method�
.
3.2.1 Green’s Theorem
Consider a volume � surrounded by a surface�
as shown in Figure 3.1. Suppose�
and�
are two functions that satisfy the Laplace equation inside � , i.e, �� � � �
and �� � � � inside the volume, then, according to Green’s second identity the
following equation holds:
�
The formulation and numerical implementation of the method is based on the course work of-fered by Dr. Spyros Kinnas in CE 380 P.4, Boundary Element Methods, 2003.
18

n
ν
S
Figure 3.1: Volume � confined by a surface�
��� � ��� �� � � � �� ��� � � � � (3.1)
where,��
is the unit vector normal to the surface�
pointing out of the domain � as
shown in the Figure 3.1.
3.2.2 Application of Green’s Formula for a two-dimensional body
Consider a body � surrounded by a surface� %
in the two-dimensional space, as
shown in Figure 3.2. Consider a unit source at a point � outside � . The potential�
associated with the unit source is given by:
� ��� ,� ��� (3.2)
where, is the position vector of the point P. Assume a potential�
which satisfies
the Laplace equation outside B.
19

�� � � � (3.3)
Consider a circle���
of radius � � surrounding the point P and a surface���
sur-
rounding the body and the source. Applying the Green’s theorem inside the volume
surrounded by� %
,���
and���
, and considering the limits�����
0 and�����
0, we
obtain the following equation:
� � � ��� ��� � � � �� � � ,� � � � ,� � � � �
� (3.4)
The above equation shows that value of the potential�
at any point depends only on
the values of�
and� ! on the body boundary. It can also be seen that the potential
can be expressed as a superposition of the potentials due to distributions of sources
and normal dipoles. The integral equals� �
for a point outside the body, �� on the
body and 0 inside the body. Following the same approach for a function� � that is
harmonic inside the body, we obtain an integral that equals 0 outside the body,�����
on the body and� � � inside the body. Adding the two integrals provides an integral
equation for the value of�
on a general 2D body which forms the governing equation
of 2D Boundary Element Method. The governing equations is as follows:
� � � �� �
� � � � � ��� � �� � � � �� ��� � ,� � � � � � � � ,� � � � � �(3.5)
Consider a body subject to an inflow of a velocity equal to�� � ! . If � � ! is the velocity
potential of the inflow and � is the total potential of the resultant flow, then,
20

SP
SB∇2φi = 0
SC
y
x
ni
B
P
∇2φ = 0
n
rP
Figure 3.2: Body B and a unit source P confined in a finite domain���
� � � � � ! (3.6)
where,�
is the perturbation potential or the potential due to the body.
Perturbation potential on the body is normally solved for when the flows involved
are rotational. Choosing� � to be equal to � � ! , the governing equation under total
potential formulation is obtained. Choosing� � to be equal to zero, the governing
equation under perturbation potential is obtained and is as follows:
�
� � ��� ��� � � � �� � � ,� � � � ,� � � � � � (3.7)
The above equation is a Fredholm integral equation of the second kind for the un-
21

known�
.
The boundary conditions that are required when the body is subject to an inflow are
kinematic boundary conditions applied on the body. The kinematic body bound-
ary condition states that the flow cannot penetrate the body and hence the flow is
tangential to the body at its boundaries.
�� �� � � (3.8)
�� �� � �� � ! �� � � �� � (3.9)
hence, � �� � � �� � !
��(3.10)
The body boundary condition that is applied when the body itself is under motion is
� �� � � �� � �� (3.11)
where,�� � is the velocity of the body.
! is substituted for in the governing equation
and a new form of governing equation is obtained.
In a numerical method the governing equation needs to be discretized so that it
can be applied on the discretized domain (discretized boundary in this case). The
boundary is first discretized into a number of straight panels. The integral equation
for perturbation potential formulation can be written in the following discretized
form (the corresponding geometry is shown in Figure 3.3):
22

j
i
i+1
ω
l
X o
Y o
rj i
ri
ri+1
(control point)
i-1
indexing direction
Figure 3.3: Figure showing the discretized body surface and corresponding indexnotation
� �� � �
�� � �� � � � � � �
��� � ,� �� � � � �
�� �� � � �
��� � �� ,� ��� � � � � � (3.12)
where, j and i are the indices representing the panels on the boundary. The above
discretized equation is to solve for the velocity potential of the� ��� panel. The first
term represents the influence of the strength of the source located on the� ��� panel
while the second term represents the influence of the strength of the dipole located
on the� ��� panel. Source and dipole influence coefficients are defined as
�� �� � � �
��� � � ,� � �� � � � � � ����� � � � � � � (3.13)
� �� �� � �
��� �� ,� �� � � � (3.14)
The resulting linear system of equations in terms of�
is given by:
23

�
� � � � � � �
��
�� � ! �� ��� � �� � �
�� � �� � � � ��
� �� � � � � ��� � � �� � � (3.15)
Performing some algebra upon the expressions for influence coefficients we obtain:
� � � ( ����� � � �� �
(3.16)
where, ( � � � ����� ( � � ) and � � � �� �
� �� � ��� � �� �
� � , � �� � � � (3.17)
� �� � ��� �� � � , � � �� �
� � � �� ,� � � � ���� #� �� � (3.18)
where, �
and �
are distances as shown in Figure 3.3.
3.2.3 Numerical Implementation
1) The surface of the body is discretized into panels.
2) Large number of panels are concentrated in areas where changes in geometry are
abrupt or large gradients in solution are expected.
3) Straight panels are used.
4) Constant strength dipoles and discrete sources are used.
5) Collocation method is used.
24

6) Influence coefficients due to all the panels are computed for each panel at its
control point and the resulting linear system of equations in�
are solved.
7) Pressure distributions, forces and moments acting on the body are evaluated from�
, based on Bernoulli’s equation.
3.3 Validations of the method
The method is applied numerically to a few problems that have analytical solutions
so that the correctness of the method is verified before it can be applied to the desired
problem.
3.3.1 Prismatic cylinder of circular cross-section
The case of a circle in two dimensions subjected to an inflow in the x - direction is
the simplest of the problems that can be used for validation of the present method.
The details are shown in the Figure 3.4. The number of panels affects the solution of
a numerical scheme but since the present case is a test case, convergence studies have
not been performed and to obtain a good solution the numerical scheme is applied
to the problem with a large number of panels on the circle. The circle is subject to
a sinusoidal inflow,� � ! �
� � � � ( ��. The kinematic boundary condition is applied
where� ! is defined in terms of the inflow velocity. The perturbation potential
�is
solved for and checked against the available analytical solution. Also, the force on
the circle is evaluated based on the added mass of the circle [Newman, 1977] and
then compared with the force obtained from the numerical scheme.
The amplitude of the sinusoidal inflow is taken to be equal to 2 units while the cir-
25

x
y
Uin = 2cos(πt)
R
Figure 3.4: An infinitely long cylinder of circular cross-section subjected to a sinu-soidal inflow
cular frequency, ( is taken to be equal to � units. The radius of the circle is taken
equal to 0.5 units. Since we are considering the circle in an infinite domain only the
surface of the circle is discretized. First, the source and dipole influence coefficients
are found at each control point due to all the panels and then, the perturbation poten-
tial is solved for by using a standard matrix solver. The solution is moved forward in
time and a new�
is solved for by applying a new set of the time dependent boundary
conditions. The analytical formula for�
at a point (x,y) at a certain instant of time
is given as:
� � � � !� � � � � + � � � ��� � � � � � � � � � � � � � ��� � � � � � (3.19)
where, R is the radius of the circle and� � ! is the magnitude of the inflow at that
instant of time. Hence,�
on the circle is equal to� � ! . The perturbation potential
26

on the body obtained from the numerical scheme is compared with the analytical
solution in Figure 3.5. The comparison as seen is exact and this is an indication of
the correctness of the method in evaluating�
.
X --->
φ b,pe
rtur
batio
npo
tent
ialo
nth
eci
rcle
-0.25 0 0.25 0.5
-0.75
-0.5
-0.25
0
0.25
0.5
0.75
1
φ numericalφ analytical
Figure 3.5: Comparison of analytical and numerical values of perturbation potentialon the circle
In the case of an oscillating circle, the force acting on the circle is given by��� �
�� � �
��, where, � � � is the added mass coefficient in the x-direction and
��is the
acceleration of the circle. The added mass coefficient in the x-direction for an os-
cillating circle is � � � � � � � � [Newman, 1977], where, � is the radius of the circle.
The velocity of the body with respect to the flow is �� � � � � � � � �
�. Hence, we
obtain the following expression for the force in the x-direction.
��� � � � � � � � � ��� � � � � � �� �
(3.20)
� 27

� �� � ��� � � � � � � � � �
�(3.21)
The amplitude of the term���
� is equal to 4.9348 units.
t/T --->
FX/ρ
onth
eci
rcle
2 2.25 2.5 2.75 3
-4
-3
-2
-1
0
1
2
3
4
Potential flow solver
4.9384
Figure 3.6: Time history of the force on the circle in the x-direction
In the numerical scheme, the pressure is calculated from the relation � � � � .
And the force� �
is evaluated from� � � � " � � � �
� which implies that� �
� � � " � � � + . Force history is plotted for one time period in Figure 3.6. The amplitude
of the force is found equal to 4.9384 units which is very close to the analytical value.
The difference will be further reduced if the number of panels is increased on the
circle.
3.3.2 Prismatic cylinder of elliptic cross-section
An elliptical cylinder subjected to a sinusoidal inflow of velocity � � � � � � ��
is con-
sidered. The details are given in Figure 3.7 The added mass of the ellipse in the
28

x
y
Uin = 2cos(πt)
Figure 3.7: An infinitely long cylinder of elliptic cross-section subjected to a sinu-soidal inflow
x-direction is given by � � � � � � � � , where, b is the minor axis of the ellipse. The
major axis is taken equal to 0.5 while the minor axis is taken equal to 0.25 units.
Following the procedure described in the case of the circle, we obtain the following
expression for the force on the ellipse;
� �� � ��� � � � � � � � � �
�(3.22)
� ���� � � � � � � � � � � �
�(3.23)
The force history is plotted in Figure 3.8 and it can be seen that the amplitude of the
force obtained numerically is in good comparison with the analytical value.
29

t/T --->
FX/ρ
onth
eel
lipse
2 2.25 2.5 2.75 3
-1
-0.5
0
0.5
1
Potential flow solver
1.2345
Figure 3.8: Time history of the force on the ellipse in the x-direction
3.3.3 Prismatic cylinder of square cross-section
This section deals with a infinitely long cylinder of square cross-section subject to
forced harmonic roll motion about the axis of the cylinder. As seen in the previous
two sections, this problem is also treated in an infinite domain. Only the surface
of the square is discretized. The corner portions of a square assume importance
due to sudden changes in the geometry and also due to changes in the fluid flow in
the vicinity of the corner. Hence, the grid in the corner region is refined and large
number of panels are concentrated into that area. The details are shown in Figure
3.9. The boundary condition is applied on ! which is written in terms of the body
velocity. The circular frequency ( of the square is taken equal to � units. The
velocity of a point on the body is:
30

2a
U = rαωcos(ωt)
n
.
∂φ/∂n = U. n
r
Figure 3.9: An infinitely long cylinder of square cross-section subjected to roll mo-tion
! � � � � �� � � ��� � (3.24)
where,�� � � � is the angular velocity of the body,
� is the position vector of the point
being considered and�
its index.
�� � � � � � � ( � � � � ( �� ��
(3.25)
where, � � is the angular amplitude and is taken equal to 0.05 units. The components
of the velocity are given by:
! � � � � � + � � � � � ( � � � � ( ��
(3.26)
!�� � � � � � � � � � ( � � � � ( ��
(3.27)
Added mass moment of inertia for a square undergoing harmonic angular oscilla-
tions is � ��� � �� � � � � ��� , where, � is the density of water and � is equal to half the
31

t/T --->
MX
Y/ρ
onth
esq
uare
2 2.25 2.5 2.75 3
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
Potential flow solver0.022377
Figure 3.10: Time history of the moment on the square in the z-direction
length of a side of the square. The length of each side of the square is taken equal to
1 unit. The moment on the body is obtained from the relation:
� � � � �� ����� � �� � � � � � � � ( � � � � � ( �
�(3.28)
� � � �� � �� � � � � � � � � � � �
�(3.29)
In the numerical scheme the moment on the body is evaluated from the force com-
ponents through the relation:
� � � � � � �� � � " � + � � + � � � � (3.30)
Time history of the moment is plotted in Figure 3.10 and shows good comparison
with the theoretical moment.
32

3.3.4 Prismatic cylinder of cross shaped cross-section
An infinitely long cylinder of a cross shaped cross-section is subject to harmonic roll
motion about the axis of the cylinder. The boundary conditions applied are similar to
the boundary conditions applied in the case of a square cylinder. The cross consists
of four arms in total with each arm making an angle of ����� with its neighboring
arm. Each arm is considered to be infinitely thin with thickness tending to zero. A
description of the cross and its discretization is shown in Figure 3.11
a
900
Figure 3.11: An infinitely long cylinder of cross shaped cross-section subjected toroll motion
The components of the velocity on the body at� ��� panel are given by:
! � � � � � + � � � � � ( � � � � ( ��
(3.31)
! � � � � � � � � � � ( � � � � ( ��
(3.32)
33

t/T --->
MX
Y/ρ
onth
ecr
oss
2 2.25 2.5 2.75 3-0.3
-0.2
-0.1
0
0.1
0.2
0.3
Potential flow solver0.312
Figure 3.12: Time history of the moment on the cross in the z-direction
Added mass moment of inertia for a cross undergoing harmonic angular oscillations
is � ��� � � � � � , where, � is the density of water and � is equal to the length of an
arm of the cross. The length of each arm of the cross is taken equal to 1 unit. The
moment on the body is obtained from the relation:
� � � � � ����� � �� � � ( � � � � � ( �
�(3.33)
� � � �� � � � � � � � � � � � � �
�(3.34)
Time history of the moment is plotted in Figure 3.12 and the amplitude of the nu-
merical moment shows good comparison with the theoretical value.
34

3.4 Roll motions of a submerged body
The objective of the present section is to present results for a submerged body under-
going roll motion using the panel method. The body is considered to be an infinitely
long cylinder with a constant cross-section and hence, the problem can be treated in
two dimensions. Two types of cross-sections are considered and are shown in Fig-
ures 3.13 and 3.14. From the Figure 3.13 it can be seen that the body has rounded
corners. These rounded corners are called bilges. In the Figure 3.14 it can be seen
that the body has sharp fin like projections at its corners. These projections are called
bilge keels. These corners are akin to the bottom corners of a ship hull. For this rea-
son, henceforth, the submerged body is going to be referred to as a submerged hull.
The main parameter that is solved for in the current problem is the added mass coef-
ficient. Once the results are obtained for the 2D problem, strip theory can be applied
to them and the results can be extended into three dimensions. The following section
discusses how the roll added mass coefficient for the hull is evaluated from the force
history.
BILGE
Figure 3.13: Figure showing cross-section of submerged hull without bilge keels
35

BILGE KEEL
Figure 3.14: Figure showing cross-section of submerged hull with bilge keels
3.4.1 Forces and added mass coefficient
� Force: The hull forces are evaluated from the pressure integrated over the
surface area of the hull. The pressure on the hull is obtained from the velocity
potential and the velocities using the Bernoulli’s equation in the following
way:
� � �� � ���
� � � � �� �� � �
� � ��� � � �� �
(3.35)
The values at infinity are all assumed to be zero. After non-dimensionalization
of pressure with respect to � � �� (��� �
%� ), the following expression is ob-
tained for the pressure:
� � � �� �
� �� (3.36)
The parameter � denotes the change of potential with time at a fixed point
in space and is evaluated with respect to the inertial system. But in the cur-
rent case, the body undergoes an unsteady motion and hence, the point under
consideration is not fixed in space. A transformation needs to be done on� �
36

in order to account for the change in the location of the point. The following
equation gives the transformation for� � :
� �� �� � �
� � � �� � �� � �� � �� + (3.37)
In the above expression, � implies the same as a material derivative does
for a fluid particle.�
� � represents the total change in the value of�
with both
increment in time and the corresponding change in the location of the point. � ��and � ��
denote the x- and y-velocities of the body at the previous time step.� �
and � denote the x- and y-velocities of the fluid particle at the point. The total
velocity � of the fluid particle is obtained from the normal component ! , and
the tangential component " . Since
�is known at every point on the body,
it is easy to calculate� " using either central, backward or forward second
order differences depending on the position of the point. If the control point
is located immediately before a corner, backward difference is used and if it is
located immediately after a corner, forward difference is used. The derivative ! is obtained directly from the boundary condition. Once the pressure is
evaluated, the forces can then be obtained by integrating pressure as given in
Section 3.3.1. A simple check is performed on the pressure evaluation method
by comparing the potential solver results for pressure with analytical values
in the case of a heaving circle in infinite fluid domain. The analytical pressure
on the circle is given by:
� � ! � � � � � � � � � � � � �! + (3.38)
where,!
is the heave velocity of the circle,�
is the angle made with the
37

positive y-axis and + is the y-coordinate of the point and�!
is the acceleration
of the circle in the y-direction. The numerical pressure is plotted against the
analytical pressure at two time instants and the comparison is shown in Figures
3.15 and 3.16. The numerical pressure matches exactly with the analytical
pressure at both the time instants thus proving the validity of the pressure
evaluation method.
S (arc length/B) -->
P/(
ρU2 )
1 2 3
-1
-0.5
0
0.5
1
numerical pressureanalytical pressure
Figure 3.15: Comparison between numerical (BEM) and analytical pressure on aheaving circle at �� �� � �
� Added mass: For roll, according to linear potential theory, the hydrodynamic
moment can be written as a linear combination of the inertia and damping
terms.
� � � � � � � ��� �� � ��� �� (3.39)
38

S (arc length/B) -->
P/(
ρU2 )
1 2 3
-0.1
-0.05
0
0.05
numerical pressureanalytical pressure
Figure 3.16: Comparison between numerical (BEM) and analytical pressure on aheaving circle at �� �� ���
where, � ��� is the roll added-mass coefficient;� ��� is the roll damping coeffi-
cient;�� and
�� are the angular acceleration and velocity. These can be ob-
tained by differentiating the expression of the roll angle, � , with respect to
time. Expanding the angular acceleration and velocity terms we obtain:
$� � � � � � � � ( � $� ��� � � � � ( $�� � � ( $� ��� � � � � ( $
��
(3.40)
The above expression can be identified as a Fourier series. The added mass
coefficient can be calculated by extracting the Fourier coefficient of the pri-
mary frequency over a period�
. The following expression is obtained for the
coefficient:
39

� � ( � $� ��� � ��� ��
$� � � � � � � � � ( $�� � $
� (3.41)
where, the variables$� � � � � and
$� are dimensional variables. In order to make
the coefficients non-dimensional, a normalization similar to [Yeung et al. 2000]
is performed.
� ��� �$� ���
� � � � � (3.42)
where,�
is the half-beam of the body and�
is the submerged sectional area
and is equal to ��
units for the present problem.
Introducing the non-dimensional variables in equation 3.41, the following ex-
pression is obtained for the normalized coefficient:
� ��� � ��� � � � � �
�
� � � � � � � � � � � �� �
� (3.43)
Once the time history of the hydrodynamic moment is obtained, the coeffi-
cients can be obtained by numerically integrating the moment, according to
equation 5.30, using the trapezoidal rule.
3.4.2 2D submerged hull without bilge keels
The 2D hull is subjected to forced harmonic roll motion with the roll angle, � �� � � � � � ( $
��, where, � � is the roll amplitude and ( is the circular frequency of the roll
motion. Velocity boundary condition is applied on the hull in terms of ! as shown
in the Figure 3.17. All the parameters in the BEM solver are non-dimensionalized
with respect to the corresponding characteristic scales.
40

� Lengths are non-dimensionalized with respect to the characteristic length� �
which is the beam length � of the hull in the current problem
� Time is non-dimensionalized with respect to the time period�
of the roll
motion
� Velocity is non-dimensionalized with respect to the characteristic velocity��� �
%�
B
U = rαωcos(ωt)
n
.
∂φ/∂n = U. n
r
D
D: Draft
B: Beam
U: Velocity
n: Normal
r: Position vector
bilge
Figure 3.17: Geometry details and boundary conditions for a submerged hull withoutbilge keels undergoing roll motion
Since the time quantity is non-dimensionalized with respect to the time period of
the roll motion, the value of the non-dimensional time period is equal to 1 unit.
Hence, the circular frequency ( is equal to � � units. Similarly the length of the
beam is equal to 1 unit. The amplitude of roll angle is taken equal to 0.05 units.
The radius of the bilge is taken equal to 2�
of the beam length � . The roll angle in
41

non-dimensional form is given by
� � � � � � � � ��� ��
(3.44)
while the angular velocity of the hull is given by
�� � ��� � � � � � � � � ��
(3.45)
The panel method is applied to the problem and the moment history over one time
period is obtained. The moment history for the hull without bilge keels is shown in
Figure 3.18.
t/T --->
Mxy
/ρU
2 B2
2 2.25 2.5 2.75 3
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
Figure 3.18: Time history of the moment on the hull without bilge keels undergoingroll motion
Applying Fourier transformation to the moment history we obtain the added mass
coefficient � ��� . The value of the non-dimensional added mass coefficient obtained
is found equal to 4.31152E-02 for 300 panels. The convergence of the added mass
42

coefficient with increasing number of panels is shown in Figure 3.19. The log plot
of error of the added mass coefficients ��� square of number of panels is plotted in
Figure 3.20. The solution from the finest grid is assumed to be the best solution or
the exact solution.
N (number of panels) -->
a 66
100 200 300
0.04285
0.0429
0.04295
0.043
0.04305
0.0431
Figure 3.19: Convergence of the roll added mass coefficient � ��� with respect tonumber of panels on the hull (without bilge keels) surface
3.4.3 2D submerged hull with bilge keels
This section presents the results for a 2D submerged hull with bilge keels undergo-
ing roll motion. The boundary conditions applied in the present problem are same
as those applied for the hull without bilge keels. The corner regions of the hull as-
sume importance due to the presence of the bilge keels where sudden changes in
the geometry occur. Hence, these regions need to be concentrated with a lot of grid
43

N2 -->
Err
or
50000 100000
10-5
10-4
Figure 3.20: Error convergence plot for the roll added mass coefficient obtained fora submerged hull without bilge keels
points. Full-cosine spacing is applied on all the sides of the hull. Geometry details
and boundary conditions are shown in Figure 3.21. The length of the bilge keel is
taken equal to 4�
of the beam length � . The moment history for one time period
is shown in Figure 3.22. The non-dimensional added mass coefficient obtained by
applying Fourier transformation is found equal to 6.5816E-02.
3.5 Oscillating hull at free surface
This section presents the radiation problem due to a hull undergoing heave motion
at free surface. Modeling and tracking the movement of a free surface due to a
disturbance is both interesting and challenging. In the present problem to reduce
the difficulty in modeling the free surface, linear wave theory is applied. Basically,
44

B
U = rαωcos(ωt)
n
.
∂φ/∂n = U. n
r
D
bilge keel
Figure 3.21: Geometry details and boundary conditions for a submerged hull withbilge keels undergoing roll motion
t/T --->
Mxy
/ρU
2 B2
2 2.25 2.5 2.75 3
-0.1
-0.05
0
0.05
0.1
Figure 3.22: Time history of the moment on the hull with bilge keels undergoingroll motion
45

linear wave theory assumes that the amplitude of the waves is very small compared
to their wave length. This assumption is valid for the present problem as long as the
heave motion of the hull is small in magnitude. The problem is solved for a range of
frequencies.
3.5.1 Boundary Conditions
A graphical description of the boundary conditions that are applied for the heaving
hull is given in Figure 3.23. The coordinate system is summed up by the location
of the origin and the orientation of coordinate axes. As seen in the Figure 3.23, the
origin is located at the center of floatation of the hull. The positive x-axis points
to the right side of the domain and the y-axis is positive in the upward direction.
The method is fully non-dimensional and the equations are non-dimensionalized
with draft�
, time period�
and velocity� �
�� as the length, time and velocity
reference scales. Since the heave motion is symmetric with respect to the y-axis,
only half the domain is considered for solving the problem. The domain consists of
four boundaries�; hull, free surface, far domain and the symmetry boundary. The
conditions that are applied on the boundaries are as follows:
� Hull boundary condition -
In 2D panel methods the boundary conditions are applied either in terms of�
or ! . On the hull, the kinematic boundary condition is applied. The kinematic
boundary condition ensures that the fluid particles on the surface of the body
do not have a velocity component normal to the body, i.e, the fluid particles
�
The solver is capable of handling irregular boundaries and hence, the boundaries need not benecessarily flat.
46

can only have components tangential to the surface of the body or the fluid
particles can only slide along the surface of the body.
� �� � � �� �� (3.46)
where,��
is the unit normal vector at a point on the surface of the body and��
is the velocity of the body. The velocity at a point on the body is given by
�� � ��� � � � � ( ��
(3.47)
where,���
is the amplitude of the heave velocity and ( is the circular frequency
of the heave motion. The amplitude is taken equal to 0.05 units and the non-
dimensional ( is equal to ��� units. The equilibrium position of the motion is
assumed to be at the mean free surface level.
� Free surface boundary condition -
Linear wave theory is assumed to govern the waves that are radiated due to the
hull motion. There are two boundary conditions that need to be satisfied on the
free surface. The first boundary condition known as the Kinematic Boundary
Condition stipulates that the velocity of the fluid particles at the free surface is
equal to the velocity of the free surface. The Kinematic Boundary Condition
in terms of the velocity potential is given by:
� �� �� � �� � (3.48)
where, � denotes the wave elevation,�
the velocity potential of the fluid par-
ticles at the free surface and�
the normal to the linearized free surface. The
47

other boundary condition is known as the Dynamic boundary condition and it
requires that the pressure on the free surface is equal to the atmospheric pres-
sure. The Dynamic Boundary Condition in terms of the velocity potential is
given by:
� �� �� , � (3.49)
where, , represents the acceleration due to gravity. The above relation is ob-
tained from applying the Bernoulli’s equation on the free surface.
� Bottom boundary condition -
The bottom boundary of the computational domain represents the sea bed. At
the bottom boundary the vertical velocity is denoted by� ! and is equal to zero
because the bed is assumed to be impermeable.� �� � � � (3.50)
� Far field boundary condition -
The far boundary in the problem consists of an extremely far vertical boundary
which represents a virtual boundary situated to the right of the hull at a loca-
tion where we assume that the waves radiated by the hull have not reached
yet. Hence, there is no disturbance felt, or, in other terms there is no velocity
potential at this location. For convenience, at the far right boundary we im-
pose� ! equal to zero since the velocity potential is expected to be zero in the
vicinity�
. Hence, the far boundary condition can be written as
�
The computation is carried out before the waves reach the far right boundary in order that reflec-tion of waves does not occur.
48

O
Y
X
b
D
d
b: half beamD: draftd: depth
hull∂φ/∂n = qn
free surface
∂φ/∂n = ∂η/∂t∂φ/∂t = -gη
∂φ/∂n = 0
φ = 0
symmetryboundary
sea bed
farboundary
Figure 3.23: Geometry details and boundary conditions for a floating hull undergo-ing harmonic heave motion
� �� � � � (3.51)
� Symmetry boundary condition -
Since the heave motion is symmetric about the y-axis of the domain we can
assume a symmetry boundary along the y-axis. Along this boundary there
is no fluid passing across it due to the symmetry and hence the following
condition on�
is applicable,
� �� � � � (3.52)
49

3.5.2 Numerical Implementation
The boundary value problem is solved as an internal flow problem using the panel
method. In an internal flow problem the fluid is bounded by boundaries, solid or
otherwise. In the present problem the hull, the free surface, the virtual symmetry
line under the hull, the sea bed and the far boundary form the boundaries that bound
the fluid.
The problem is considered in deep waters. Since the draft of the hull is chosen as
the characteristic length its length is taken as 1 unit. A hull with a ratio of%� � �
is considered. Hence, the half beam length�
as shown in the Figure 3.23 is equal
to 2 units. The length of the free surface or the extent of the domain is based on
the wavelength of the waves radiated due to the heave motion of the hull. The
wavelength is decided from the frequency of the motion and the extent is taken
such that the wave travels at least 2-3 wavelengths of distance. The bottom of the
domain representing the sea bed is chosen such that it’s depth is greater than half the
wavelength satisfying the deep water conditions.
The boundaries are discretized into a number of straight panels. Each panel consists
of a discrete source and dipole of constant strengths. The end points of each panel
are called grid points and the panel midpoints are called control points. Wherever
there is a sharp change in the shape of the boundary a large number of grid points
are concentrated into that area. In the present problem such instances occur at bilge
region of the hull, the intersection of the hull with the free surface and intersection
of the hull with the symmetry boundary. Full cosine spacing is used on the hull
side and bottom. Expansion ratios are used on the free surface and the symmetry
boundary concentrating more points towards the hull. Care is taken to provide at
50

least 15 panels per wavelength to capture the wave profile correctly near the hull.
The absence of lot of panels away from the hull numerically dampens the wave and
thus avoids the reflection problem, if any.
The source and dipole influence coefficients are calculated at each panel due to all
the panels and stored in separate arrays. The discretized governing equation is ap-
plied on each panel at its control point. At each control point either�
or ! is known
depending on the boundary condition applied. Thus, a linear system of equations in
the unknowns ! and
�is obtained. For the heave problem, the linear system of
equation is as follows:
��������
���� �� � �� % ���� � � � � �
��� � %
� � ���
% � % � % % % � � % � ���� �� � �� % ���� � � � � � �
� � % � � � � �
��
��������
� ���
� %� �� ! �
�� �
������������
�� �
�� % �
��� �� ��
� ��
����
� % �
� � ��
� % � � %�
� % % � % � % �����
�� �
�� % �
��� �� �� � � � �
�� � % � � � � �
��
���������
! � ! � ! %� ! �� �
��
The above system of linear equations were solved using a matrix solver based on
LU Decomposition � . This system of linear equations is solved every time step and
LUD solver is useful because the coefficient matrix does not change with time.
LU Decomposition (LUD) solver denotes Lower Upper Decomposition matrix solver based on
inversion of the matrix.
51

3.5.3 Time-marching
The velocity potential�
is assumed to be known on the free surface at the first time
step of the problem. The motion of the hull is assumed to start from zero and hence
the potential on the free surface is assumed to be zero. At the other boundaries ! is known and the resulting linear system of equations is solved as discussed in
the previous section. On the free surface ! is solved for. Once the value of
! is
obtained the kinematic free surface boundary condition is applied to find the wave
elevation � ;
� �� �� � �� � �
� ! � � � � ! � � � � �� � � (3.53)
Once the elevation at the new time step is obtained the Dynamic free surface bound-
ary condition can be applied to obtain the�
at the new time step;
� �� �� , � � � ! � � � � ! � � , � ! � �
(3.54)
A non-dimensional number called Froude number denoted by���
is obtained when
an expression containing , is non-dimensionalized. It is based on the frequency, ,and the hull draft
�. It is also called reduced frequency and is defined as follows:
� � �)(�� �, (3.55)
After non-dimensionalization,�
at the new time step is obtained from the following
expression:
52

� ! � � � � ! � � � � �� � � � ! � �
(3.56)
At the first time step first order backward Euler method is used and at later time steps
a second order backward method is used. The whole set of operations discussed
above is repeated at the next time step.
3.5.4 Forces and Hydrodynamic coefficients
The forces and moment are calculated from the pressure on the hull as explained
in Section 3.3.1. Since only half the hull is used for calculation a zero force in the
x-direction is not obtained as expected. To get the total force in the y-direction the
force has to be multiplied by a factor of two thus accounting for the other half of the
hull. The force history is plotted versus the non-dimensional time in Figure 3.24.
Applying Fourier transform to the force history in the y-direction, we obtain the
added mass coefficient � � � and the damping coefficient� � � respectively. For heave,
according to linear potential theory, the hydrodynamic moment can be written as a
linear combination of the inertia and damping terms.
� � � � � � � � � �� � � � �� (3.57)
Expanding the velocity terms as a function of time, we obtain:
$� � � � � � ��� ( $� � � � � � � ( $�� ��� $� � � � � � � ( $
��
(3.58)
53

t/T --->
Fy/
(ρU
2 D)
0 1 2 3
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Potential flow solver
Figure 3.24: Force history for a hull undergoing heave motion for� ��� � ��
The above expression can be identified as a Fourier series. The added mass and
damping coefficients can be calculated by extracting the Fourier coefficients of the
primary and secondary frequencies over a period�
. The following expressions are
obtained for the coefficients:
��� ( $� � � � ��� ��
$� � � � � � � � � ( $�� � $
� (3.59)
��� $� � � � ��� ��
$� � � � � � � � � ( $�� � $
� (3.60)
where, the variables$� � � � � and
$� are dimensional variables. In order to make the co-
efficients non-dimensional, a normalization similar to [Newman 1977] is performed.
54

� � � �$� � �� �
� (3.61)
� � � � $� � �
� � � ( (3.62)
Introducing the non-dimensional variables in equation 3.25, the following expres-
sions are obtained for the normalized coefficients:
� � � � � � ���
� �
�
� � � � � � � � � ��� �� �
� (3.63)
� � � �
� � ���� �
�
� � � � � � � � � ��� �� �
� (3.64)
Vinayan [2004] independently worked on the scheme and presented results for heave
motion. The non-dimensional added mass and damping coefficients are compared
with results presented in Newman [1977] in Figures 3.25 and 3.26. As seen in
the figures, the coefficients obtained from the potential flow solver compare well
with the coefficients presented in Newman [1977]. The deviation of Euler solver
results from the results of other methods at lower Froude numbers is attributed to
the discretization error. At lower Froude numbers larger domains need to be used,
and to save computational time coarse grids are used in the Euler solver.
3.6 Tip Vortex Tracking Method
Potential method, when applied to the problem of floating bodies undergoing har-
monic heave motion, proved satisfactory and the results compare well with theory
55

0.4 0.5 0.6 0.7 0.8 0.9 1.0 1.1 1.2 1.3 1.40
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
w(D/g)1/2
a 22
BEMNEWMANEULER
Figure 3.25: Comparison of heave added mass coefficients obtained from the BEMsolver [Vinayan 2004] with those presented in [Newman 1977] and obtained fromEuler solver [Kakar 2002]
and experiments. But, when it is applied to the problem of a floating body under-
going harmonic roll motion at the free surface Vinayan [2004], the method fails to
reproduce the coefficients that match with the experiment results. Potential method
tends to over predict the hydrodynamic coefficients and this discrepancy is mainly
due to the assumptions that the fluid is inviscid and the flow is irrotational around
the hull. Viscous separation and shedding of vortices past corners of the hull play
an important role in roll damping. Hence, there arises a need to incorporate these
viscous effects in order to predict roll damping more accurately. The following sec-
56

0.4 0.5 0.6 0.7 0.8 0.9 1.0 1.1 1.2 1.3 1.40
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
w(D/g)1/2
b22
BEMNEWMANEULER
Figure 3.26: Comparison of heave damping coefficients obtained from the BEMsolver [Vinayan 2004] with those presented in [Newman 1977] and obtained fromEuler solver [Kakar 2002]
tion discusses an attempt to develop a vortex tracking method � that can model the
separation of flow past the bilge keel using a shear layer. After the inclusion of the
shear layer, the flow is still assumed to be irrotational and the fluid, inviscid. Hence
the problem can be treated using potential method by distributing source and dipoles
over boundaries and dipoles over shear layers.
�The present method is based on a method developed by Lee [2002] to predict vortex roll-up
motion in 2D.
57

3.6.1 Numerical Formulation and Implementation
The governing integral equation is as follows:
� � � �� �
��� ��� � � � � �� � � � �� ��� � ,� � � � � � � � , � � � � � ���� � � � � � �� � � , � � � , � � � � � (3.65)
where,� %
is the surface of the body and tip vortex while�� is the boundary of the
wake sheet. This equation is the same as the governing equation used to model flow
over a hydrofoil with wake panels included at the trailing edge. A bilge keel and a
shear layer attached at its tip are shown in Figure 3.27
n--
n+
Wake
Bilge Keel Tip Vortex
φN
φ1
Figure 3.27: A bilge keel with a trailing wake and a tip vortex
The second integral in the above governing equation can be written as:
��� � � � ��� � � �� � � � ���� � � � � ,� � � � � � � � � ,� � � � � � � (3.66)
58

where,� � and
� �denote the unit normal vectors on the positive side and negative
sides of the shear layer respectively. The normal components of the total fluid ve-
locities on the two sides of the wake sheet (or shear layer),�! �! � � � �! �
! have to have
the same magnitude in order that the lower and the upper layers of the wake,�� stay
together. The difference in the tangential velocities is what causes the shear layers
to curl as vortex is shed each time step. Hence, �� ! � � ��� ! � and the first term of the
above integral goes to zero.
The final equation:
�
� � ��� � � � � � $� � !
$� � � ,� � � � ,� � � � � � ��� � � � � �
�� � ,� � � � � �
(3.67)
NUMERICAL TREATMENT:
� At the first time step,� �
at all the panels is assumed to be��� �
� (Kutta
Condition).
� At the nth time step,� �
at the first wake control point is equal to��� �
�
while the� �
at the second wake control point is equal to��� �
� at the� ��� time step and so on.
� At each time step the induced velocities due to the body and the wake itself
are found at each of the wake control points and then, on the tip vortex
� The new locations of the panel mid-points at time �� �
� are computed using
an Euler scheme
� � � � � ��� � � � � � � � ��
� � � � � � �
59

� Once the control points are moved to new locations, coordinates and dipole
strengths of the new panel end points are obtained by interpolating the control
point coordinates and then, the dipole strengths.
� The problem is solved for the new wake and tip vortex geometry and the above
numerical scheme is repeated in the next time step.
3.6.2 Application to flow over a foil
The tip vortex tracking solver is applied to the problem of a 2D foil subjected to
a steady uniform flow with a lateral sinusoidal gust. Description of the problem is
given in the Figure 3.28. The amplitude � �, circular frequency ( , of the gust, and the
magnitude of the uniform inflow are taken equal to 0.025, 3 and 1 units respectively.
Initially a wake consisting of 2 to 3 panels and of certain length (equal to a user-
input percentage of the foil chord length) is considered (Figure 3.29). The tip vortex
radius is also taken from user given input. The trailing wake is expected to grow
in length as vorticity is shed from the trailing edge of the foil each time step and is
expected to exhibit a wavy pattern due to the lateral gust. The results for the wake
are shown in Figure 3.30 for two cases; one without a sinusoidal gust and another
with the sinusoidal gust. As expected, the trailing wake in the case without a lateral
gust is straight, while the wake in the lateral gust case progresses like a wave. The
vorticity is always shed from the trailing edge in the tangential direction (depending
on the direction of the gust) according to the Mangler condition � [Mangler and
Smith 1970] and as seen in Figure 3.31, the present method imposes the condition
well. Note that the method starts with a wake that is non-tangential to both sides
�
The Mangler condition ensures that the velocity at the trailing edge is finite.
60

of the trailing edge and no explicit tangency condition is imposed on the first wake
panel. In the figure, the x-axis and y-axis scales are made independent in order to
show the geometry of the wake and the trailing edge clearly. The lift force on the
foil is plotted in Figure 3.32 against the run time and is sinusoidal with time.
u = αosin(ωt)(sinusoidal gust)
v (uniform inflow)
Figure 3.28: A 2D foil subjected to a uniform inflow with a lateral sinusoidal gust
61

-1.02
-1.01
-1
Trailing edge of the foil
Wake panels
Tip vortex
node
Figure 3.29: Description of the initial wake and tip vortex geometry
u = αosin(ωt)(sinusoidal gust)
v = -1 (uniform inflow)
Figure 3.30: Figure showing trailing wake for a foil subject to a uniform inflow anda lateral sinusoidal gust
62

φN φ1
∆φw = φ1 - φN
+ - Trailing edge
wake
Figure 3.31: Vorticity being shed tangentially into the shear layer
t/T --->
Lif
ting
forc
eon
the
foil
1 2 3
-0.2
-0.1
0
0.1
0.2
Figure 3.32: Time history of the lift force on the foil
63

Chapter 4
Numerical Formulation of 2D Viscous Solver
This chapter discusses the formulation of the two-dimensional unsteady Navier-
Stokes solver�
based on finite volume method. The topics that the chapter covers
include the choice of the computational nodes, method of stepping the solution for-
ward in time, upwinding schemes and the pressure correction method.
4.1 Non-dimensional governing equation
Any fluid flow in nature is governed by some laws of physics. The underlying
physics can be approximated by a set of partial differential equations. A two di-
mensional, unsteady, incompressible and laminar flow is governed by Navier-Stokes
equations. Navier-Stokes equations consist of the continuity equation and the mo-
mentum equations in the x- and y-directions. The vector form of the continuity and
momentum equations for an incompressible and viscous fluid can be written in the
following way:
�
The new solver is being developed by Yi-Hsiang Yu, a doctoral graduate student in the OceanEng. group at UT Austin. The solver is based on the Euler solver developed by Kakar [2002], whichin turn was based on Choi [2000], Choi and Kinnas [2000] and Choi and Kinnas [2003], and recentlymodified by Dr. Hanseong Lee, a Research Associate in the Ocean Eng. group at UT Austin.
64

��
� $� � � (4.1)� � $�� ��
� $� ��� $� �
��
� $� � � $� � ��
�� � $�
(4.2)
Where� $�
represents the total velocity,� $�
the body force per unit mass,$� the density
of the fluid,$� the pressure,
$� the time and � the kinematic viscosity. In the above
equations, the hat ($) implies a dimensional variable. The dimensional variables
in the governing equation are non-dimensionalized with respect to the following
characteristic variables;
� Characteristic length L, which typically is a main length dimension specific to
each problem
� Time period T
� Velocity���
, which is equal to��
After non-dimensionalization, the Navier-Stokes equations can be rewritten as
� ��� �� �� � ��
�� � �� � �
(4.3)
where the column matrices��
,�
and�� represent the following:
�� �� �� � � � �
� � � � ��� � � � ��� � � �� �
���� �
� ���� � (4.4)
65

where ��� denotes the Reynolds number for the flow and is defined as ��� � �&�� .
Since the numerical scheme is split into solving the momentum equation and the
pressure correction equation, the pressure terms and the body force terms are grouped
and put on the right hand side of the equations. The above equations represent the
conservative form of the equations.
4.2 Finite Volume Method
In the finite volume method, the solution domain is subdivided into a finite num-
ber of small control volumes or cells by a 2D mesh (the present solver is two-
dimensional). The mesh could be made up of either quadrilateral or triangular cells,
but, the present method is capable of solving only for quadrilateral cells (structured
grids only). The finite volume method uses the integral form of the governing con-
servation equation. After applying the Gauss divergence theorem to the volume
integrals we obtain:
�� �
���� � � �
��� �� � �� �� � � � ���
������ �� � � �
��� � � �� �� � � � (4.5)
The integral conservation equation applies to each cell, as well as the whole domain.
If equations for all the cells are summed up, the global conservation equation is
obtained, as surface integrals over the inner cell faces cancel out. The above set of
integral equations can be written in the following semi-discrete integral form:
� ��� � ��� � �� � ��� " � �� !
! ���
� ��� � � � � ��� � �� � ��� " � � � � � � � �� ��� (4.6)
66

Figure 4.1: Geometry details of the cell based scheme
In the above equations�� � � � � � � . � � � + , when solving the x-momentum
equation and� � � , when solving the y-momentum equation.
������ denotes the
length of each face of the cell.!! is the velocity on a face normal to it in direction.
� � is the area of the cell represented by a set of indices:�
and�. From coordinate
geometry, given the end points (Figure 4.1), the area of a quadrilateral is defined as:
��� � �
�����
� � �� � + � + �
�� � �
� � + � + ��
�����
(4.7)
In every numerical scheme a set of points have to be chosen at which the values
of unknown dependent variables are to be computed. The present scheme is based
on colocated grid arrangement. In the colocated arrangement all the variables are
stored at the same set of grid points. In the present solver, the cell centers, instead of
the cell corners are chosen to be the computational nodes and hence, the scheme is
a cell based scheme. The colocated arrangement is advantageous to use in compli-
cated solution domains, especially when the boundaries have slope discontinuities or
the boundary conditions are discontinuous (Ferziger and Peric [2002]). It provides
better accuracy for non-orthogonal grids and specification of boundary conditions at
singular points on the boundary can be avoided. The Figure 4.1 shows cell center
67

based geometry. While calculating the flux, the value on the cell face (at point D) is
needed, and it can be obtained from Taylor series expansion about the point C. The
first derivative of the velocities with respect to space��� � and
��� � also can be found at
D in a similar way using the values at point C.
4.3 Upwind scheme
When a problem is dominated by convection, the flow direction assumes importance
and the influence of the flow properties at upstream nodes on the downstream flow
field needs to be captured. Upwind schemes help in this regard. The current solver
uses a popular scheme called QUICK (Quadratic Upwind Interpolation for Convec-
tive Kinematics) by Leonard [1979] to evaluate velocity at a cell face. Depending
on the direction of the flow, a parabola is fit to the data at two nodes upstream of the
face center and one node downstream of the face center. The scheme is third order
accurate. Since the solver uses normal velocities at the face centers in the momen-
tum equations, the upstream and downstream data points are located on the normal,
equidistant from each other. If�
,�
, and� �
denote the downstream, the first up-
stream, and the second upstream nodes respectively, then, the normal velocity at the
face center is obtained by,
!! � � ��� �
�
�!! ��
��
!! �
�
!! �� (4.8)
The above equation is valid only for uniformly spaced nodes.
68

4.4 Time Marching
Crank-Nicolson scheme, a second order accurate method is applied for discretiza-
tion of the unsteady term in the semi-discrete integral equation (equation 4.6). The
scheme is an implicit scheme and unconditionally stable. Crank-Nicolson scheme is
of second order accuracy and is useful when time accuracy is of importance. when
applied to the equation 4.6, we have:
�� ! � ���� � �� !��� ��
��
��� �� � � � " �� !
!�
���� ��� � � !��� � � �� � ��� " �� !
!�
���� ��� � � ! � �������
� � �� � � � " � � � � ��� � ! � �
(4.9)
where� � represents the present time step and
�� ! � ���� represents the unknown
variable that is being evaluated. An iterative scheme is applied to the above equation
to obtain a converged value of the unknown dependent variable. An iterative scheme
is necessitated by the presence of non-linear terms at the present time step on the
right hand side.
4.5 Pressure Correction Scheme
Since there is no independent equation for the pressure in Navier-Stokes equations,
there is a difficulty in solving for the unknowns in the equations. The continuity
equation can be used to obtain a solution to the pressure. A pressure correction
method, SIMPLE (Semi-Implicit Method for Pressure Linked Equations) developed
by Patankar [1980] is applied to the current numerical scheme to solve for the pres-
sure field. In the scheme a correction is applied to both pressure and velocities:
69

� � ��� � � � (4.10)
� � ��� � � � (4.11)
� � � ��
��
(4.12)
where � � , � � and ��
denote the pressure correction, x-velocity correction and the
y-velocity correction respectively. For mass conservation to be satisfied on a cell,
cumulative flux in the cell has to be equal to zero. Cumulative flux is obtained from
adding the fluxes through all the faces of the cell. Hence, the continuity equation is
enforced on the faces of the cell. Therefore, a correction is applied to the velocities
at the cell face centers:
!! � � ��� � !
! �� � ��� � !!� � � ��� (4.13)
where!! � � � � is the normal velocity at the center of the cell face;
!! �� � ��� is the in-
termediate velocity in the iterations between momentum and pressure correction
equations and!!� � � ��� is the correction to the velocity at the face center. The veloc-
ity at the face center is interpolated from its two neighboring cell center velocities
predicted from the momentum equations.
The main velocity variable!! in the normal direction momentum equation can be
substituted with the above expression. Neglecting the convective terms, we obtain
the following relation between the velocity correction and the pressure correction:
70

!!� � � ��� � �
�� � �� � (4.14)
� !! � � ��� � !
! �� � ��� ��� � �� � (4.15)
Since the corrected velocity satisfies the continuity equation, we can write the satis-
fied continuity equation in terms of face velocities as:
�� � ��� " � �� � �� � � � � �� � ��� " ! �� � ��� � � (4.16)
As a non-staggered grid arrangement is used, the scheme has to be modified to avoid
the checkerboard oscillation problem:
!! �� � ��� � �!
! �� � � � ��������
� �� � ��� ������
� �� ��� � (4.17)
where�!! �� � � � is the interpolated velocity;
! represents the derivative in the normal
direction to the cell face; � � denotes that the derivative is obtained by averaging the
adjacent cell center values and�
denotes that the derivative is obtained directly by a
differencing scheme. The above scheme helps avoid the checkerboard distribution of
pressure. Once the pressure correction is obtained from the equation 4.16, the face
velocities can be calculated from the equation 4.14. The velocities at the cell center
are then calculated from the momentum equations using the face velocities. The
new face velocities are determined by interpolating the adjacent cell center values.
And the whole process is repeated till the corrections reach the value of zero within
a tolerance limit.
71

Chapter 5
Applications of 2D Navier-Stokes solver
This chapter discusses the application of the 2D unsteady Navier-Stokes solver to
a few standard CFD problems and to the problem of a 2D body undergoing forced
harmonic motions. The solver is first applied to a simple problem of channel flow. It
is also applied to capture the wave profile of 2D progressive waves. The method is
then applied to the problem of a 2D floating body undergoing harmonic heave and
roll motions in the presence of a free surface. Modeling the interaction between the
free surface and the body is always a challenging problem and difficult to deal with.
When the solver is applied to the problem of a 2D hull undergoing forced harmonic
roll motions, the pressure evaluated on the hull is found to be erroneous. This forms
the motivation behind uncoupling the viscous and free surface effects and studying
them independently. The viscous solver is then applied to the problem of a 2D
submerged body undergoing forced harmonic roll motions to isolate viscous effects
on the pressure. The problem is solved with respect to an inertial fixed coordinate
system and the results are presented. The results for pressure are compared against
results from the potential solver.
72

5.1 2D Channel Flow
Simulating flow in a 2D channel is a simple test that the present solver can be put
to. The results obtained from the viscous solver can be compared with the analytical
solution available for fully developed flow in a 2D channel to validate the scheme.
A rectangular domain is considered. At the inlet boundary, the x-velocity is given a
uniform value of unity, the vertical velocity is taken equal to zero and the pressure
is extrapolated from inner nodes using a second derivative in x-direction. A no-
slip boundary condition is imposed for the velocities on the top and bottom wall
boundaries of the channel. At the outlet boundary first derivative of the horizontal
and vertical velocities, and the second derivative of the pressure with respect to are
taken equal to zero. The boundary conditions are shown in detail in Figure 5.1. The
results are presented for the horizontal velocity and the pressure inside the domain
in Figure 5.2. As seen from the figure the flow is fully developed and the pressure is
linear downstream of the inlet boundary as expected. Figure 5.3 shows comparison
of the velocity profile at the outflow boundary obtained from the viscous solver
with the classical analytical solution of the parabolic velocity profile in laminar flow
(Couette flow). As seen from the figure, the viscous solver solution for velocity
compares well with the analytical solution.
5.2 Numerical Wavemaker
A 2D hull undergoing harmonic motions at a free surface is bound to radiate waves in
the outward direction or away from the body. These waves play an important role in
damping the motion of the body. Therefore, it becomes necessary for the numerical
scheme/solver to be able to capture the wave profile of the radiated waves well in
73

u = 1
v = 0
∂2p/∂x2 = 0
u, v, ∂p/∂y = 0
u, v, ∂p/∂y = 0
∂(u, v)/∂x = 0
∂2p/∂x2 = 0
no-slip condition
no-slip condition
wall
wall
Inflow Outflow
Figure 5.1: Description of the boundary conditions applied for a 2D channel flow
order to predict the motions accurately. To check the ability of the scheme in this
regard, it is proposed to capture the wave profile of a developed set of progressive
waves. The waves are assumed to be governed by linear wave theory. Under linear
wave theory assumption, the amplitude of the wave is considered to be very small
compared to its wavelength; ����� �. The analytical expressions for the particle
velocities and the pressure are as follows:
� � � ( � �� � � � � (5.1)
� � � ( � ��� � � � (5.2)
� � ��, � � � �� � � (5.3)
where, � � � and � are the horizontal velocity component, vertical velocity compo-
74

Figure 5.2: The velocity and pressure contours for the fully developed flow in a 2Dchannel obtained from the viscous solver
nent and the pressure respectively. In the above expressions, � is the amplitude of the
wave; ( is the angular frequency, and is related to the time period�
by ( � �� � ;�
is
the wave number and related to the wavelength� �
as� � �� � ; and
� � � ( � . is
the horizontal coordinate, and � , the vertical coordinate ( � � � on the free surface);
� is the time; � is the density of the fluid, and � , the wave elevation, is a function of
both and � and is related to them as � � � � � � � . It should be noted here that all
the formulation in the scheme has been expressed in terms of the vertical coordinate
+ while � is the usual notation used to denote the vertical coordinate in wave theory.
From our definitions, we have � � + , i.e, if � � �, then, + � �
. It can
be seen from the above equations that, for negative � , the velocity components die
down exponentially. Also, for deep water (����� �� � ), the particles move in circular
paths with radius � � � � ��.
75

Figure 5.3: Comparison of horizontal velocity profile obtained from the viscoussolver at the outflow boundary with analytical solution
The domain used for computation is as shown in Figure 5.4. The domain is chosen
such that the boundary at the center of the free surface is shaped like a hull. The
boundary conditions applied at this hull boundary are not of wall but of through-
flow type. Two types of input conditions can be given to the solver. In the first type,
the analytical values for particle velocities are given at the left extreme boundary
and in the second, the analytical values for particle velocities are given at the hull
shaped boundary. The boundary where analytical values of velocities are given,
is considered as the inflow boundary. At least fifteen grid points are necessary to
capture one wavelength numerically and hence, while assigning the number of grid
points on the free surface, care is taken to satisfy this criterion. The bottom of the
domain is kept at a distance from the free surface such that deep water conditions
are satisfied. The length dimensions are non-dimensionalized with respect to the
76

wavelength,� �
, and the time dimensions are non-dimensionalized with respect to
the time period,�
, of the wave. The velocity dimensions are non-dimensionalized
with respect to���
( =��� ) as defined previously. Since wavelength is chosen as the
characteristic length, its value is always equal to unity . The boundary conditions
are summarized in the following section and are also illustrated in Figure 5.4..
∂2(u,v,p)
∂x2 = -k2 (u,v,p)= -k2 p
∂2p
∂x2
∂(u,v,p)
∂y= k(u,v,p)
∂P/∂t = ρgv ∇ Free surface
v = aωe(ky)sin(kx-ωt)u = aωe(ky)cos(kx-ωt)
INFLOW OUTFLOW
Figure 5.4: Description of the boundary conditions applied for a numerical wave-maker
5.2.1 Boundary Conditions
� Inflow Boundary: At the inflow boundary the analytical values of velocity
components and pressure derivative are assigned explicitly;
77

� � ��� � � #��� � � � � � ������ ��� �
�
� � ��� � � #��� �� � � � ������ ��� �
�(5.4)� � �� � � � ������ � � �
where, the frequency ( is replaced by ��� and wave number�
is replaced by�� �� .� Outflow or Far Boundary: At the far boundaries analytical values of the deriva-
tives of velocity components and pressure are assigned;
� � �� � � � � ���� � � �� � �� � � � � ���� � � � (5.5)� � �� � � � � ���� � � �
� Bottom Boundary: The bottom boundary is assumed to be far enough for the
waves not to disturb the fluid particles at the boundary.
� � �
� � � (5.6)� �� + � � ���� �
� Free Surface Boundary: There are two boundary conditions that need to be
satisfied on the free surface. The first boundary condition known as the Kine-
matic Boundary Condition stipulates that the velocity of the fluid particles at
78

the free surface is equal to the velocity of the free surface. The Kinematic
Boundary Condition is given by:
� �� �� � (5.7)
where, � denotes the wave elevation, � , the vertical velocity of the fluid par-
ticles at the free surface and�
, the normal to the linearized free surface. The
other boundary condition is known as the Dynamic boundary condition and it
requires that the pressure on the free surface is equal to the atmospheric pres-
sure. The Dynamic Boundary Condition in terms of the velocity potential�
is
given by:
� � �� �� ��, � � � (5.8)
where, , represents the acceleration due to gravity. The above relation is ob-
tained from applying the Bernoulli’s equation on the free surface.
In the viscous solver, the boundary conditions need to be specified in terms of
� , � and � . Hence, using the above two free surface conditions, an expression
for each of the above variables needs to be derived. Differentiating the equa-
tion 5.8 with respect to time and applying the Kinematic Boundary Condition,
we obtain,
� � �� �� � , � � � (5.9)
Differentiating the above equation with respect to we obtain,
79

� �� �� � � �� � � , � �� � � (5.10)
Using the irrotationality condition on velocities, � � � �� � , we obtain,
� � �� �� � , � �� + � � (5.11)
Knowing that � � � � � � + � � ��� � , we can replace # � � # by ( � � and obtain the
following expression for the horizontal particle velocity � ,
( � � � , � �� + � �� �� + � ( �, � (5.12)
The Bernoulli equation is given by,
� � � � �� �� ��, � � � (5.13)
Differentiating the above with respect to time, we obtain,
� �� �� � � � �� �
� � � (5.14)
Using equation 5.9, we obtain the following expression for the pressure � on
the free surface,
� �� �� ��, � (5.15)
80

Differentiating the above equation with respect to + and interchanging the
derivatives for � , we get,
�� �� � �� + � � ��, � �� + (5.16)
Differentiating the Bernoulli’s equation once with respect to + and once with
respect to time, we obtain,
�� �� � �� + � � � � �� �
� � � �� + � � � (5.17)
Modifying the above equation using equation 5.16, and replacing # � � # by ( � � ,
we obtain the following expression for the vertical velocity component � ,
� �� + � ( �, � (5.18)
The above condition is imposed explicitly, i.e, the vertical velocity on the right
hand side is taken from the previous time step.
Wave elevation and pressure contours at two different time instants are shown in
Figures 5.5 and 5.6. From the figures it can be seen that the scheme evaluates the
pressure correctly and captures the wave elevation very well. The wavelength ob-
tained is equal to unity as observed in the figures. The wave has traversed a distance
of half the wavelength in one half of a time period as expected.
81

X;V1-2 -1 0 1 2
P0.06340.05490.04630.03770.02920.02060.01210.0035
-0.0050-0.0136-0.0221-0.0307-0.0393-0.0478-0.0564
Figure 5.5: Pressure contours under a wave and the corresponding wave elevation at�� � ���
X;V1-2 -1 0 1 2
P0.06340.05490.04630.03770.02920.02060.01210.0035
-0.0050-0.0136-0.0221-0.0307-0.0393-0.0478-0.0564
Figure 5.6: Pressure contours under a wave and the corresponding wave elevation at�� � ����
82

5.3 Heave and Roll Motions
This section presents the results for the application of viscous solver to 2D har-
monic motions of a floating body. The hydrodynamic coefficients obtained for both
heave and roll motions are compared with results from theory, experiments and other
solvers.
5.3.1 Assumptions
In order to simplify the complex problem of harmonic motions of a floating body
certain assumptions are made. The assumptions made in the present problem are
taken from previous work done by [Kakar 2002], except the inviscid fluid assump-
tion. The present solver is a laminar flow solver and hence, the fluid is assumed to be
viscous. The hull is subjected to forced harmonic motions and decay in its motion
is assumed to be absent.
� Linear wave theory is assumed
� The motions of the hull are assumed to be small; non-moving grid is used
� Forward speed of the ship is assumed to be zero
� Motions are assumed to be uncoupled
� The center of floatation is assumed to be the roll center
5.3.2 Coordinate System and Grid details
The coordinate system used for simulations of hull motions is shown in Figure 5.7.
Its origin coincides with the center of floatation of the hull. The x-axis is positive
83

to the right and y-axis is positive in the upward direction. In the Naval Architecture
convention, the x-axis is positive towards the bow of the ship and the y-axis is posi-
tive to the port side of the ship. The y-axis in the present problem is the same as the
z-axis in Naval Architecture convention.
A C-type structured grid shown in Figures 5.8 and 5.9 is used for the present prob-
lem. One set of grid lines follow the shape of the hull and another set of grid lines
originate from the hull. The index representing the grid lines following the hull is
called�
index and the index representing the other set of grid lines is called�
in-
dex. The C-type grid is advantageous to use due to the nearly orthogonal cells that
can be created near the intersection of the hull and the free surface. An H-type grid
[Kakar 2002] if used, has highly non-orthogonal and coarse cells near the hull�
free surface intersection.
The geometry details of the hull, the extent of the domain, the depth of the domain,
and the number of grid points on each of the boundaries total up as the inputs for the
grid generation code. The beam, draft, bilge radius and bilge keel length (if keels
are present) are the geometry details of the hull. The extent of the domain on either
side of the hull is chosen such that it is equal to at least two wavelengths. In deep
water a wave group travels half its wavelength in one time period and the simulation
is typically run for 3-4 time periods. The number of grid points on the free surface
boundary is given such that there are at least 15 grid points per wavelength. The
study is done for non-dimensional frequency� � � ranging from 0.4 to 1.4. Hence,
the extent of the domain varies from Froude number to Froude number depending on
the wavelength� � � ��
� ! � # . The depth of the domain is chosen such that it satisfies
the deep water criterion,��� � � � .
84

X
Y
∇ SWL Free surface0
Hull
Center of floatation
Far boundary Far boundary
Bottom boundary (sea bed)
Figure 5.7: Depiction of coordinate system and domain for a floating body undergo-ing harmonic motions
5.3.3 Froude number and Reynolds number
The non-dimensional frequency� � � is similar in form to the Froude number used
in typical Naval Architecture problems and is hence called Froude number for con-
venience. It is defined in terms of the circular frequency ( and the characteristic
length�
(draft�
for heave motion and half-beam�
for roll motion) in the following
manner:
� � � �*( � �,
The dimensional value of ( and hence, the time period are obtained from the above
expression for a particular value of the Froude number. The Reynolds number for
the problem is then calculated from the following relation between the characteristic
85

B/D = 2
B
D
Bilge
Figure 5.8: Grid details for a rectangular hull without bilge keels
B/D = 2
B
D
Bilge keel
Figure 5.9: Grid details for a rectangular hull without bilge keels
86

length and the time period:
��� �� ����
� ��� �� �� �
5.3.4 Heave Motion
The viscous solver is applied to the standard problem of a 2D hull undergoing forced
harmonic heave motions at a free surface. Heave problem is relatively an easier
problem to solve when compared to the roll motion problem. Hence, the heave
problem is used as a validation test for the viscous solver. Also, many researchers
have successfully solved the heave problem and the results are standardized. A
2D rectangular hull, with a Beam/Draft ratio equal to 2 and without bilge keels is
considered for the problem. All the length dimensions are non-dimensionalized with
respect to the draft�
of the hull. Time and velocity are non-dimensionalized as done
previously in Section 3.4.2. Non-dimensional time period and frequency ( are equal
to 1 and ��� units respectively. The velocity amplitude is taken equal to 0.05 units.
The following boundary conditions are applied for the problem:
� Hull boundary:
A no-slip boundary condition is applied for velocities on the hull. The pressure
on the hull is calculated from the momentum equation.
� � �
87

� � !�� � � ( � (5.19)� �� � � � � � !� �
� � !� � !� � � � " � � !� � �
� Free surface: � �� + � ( �, �� �� + � ( �, � (5.20)� �� �� ��, �
� Far boundaries
� � �
� � � (5.21)� � �� � � � � �
� Bottom boundary
� � �
� � � (5.22)� �� � � �
Vugts [1968] presented results for a family of cylinders heaving at the free sur-
face. The results have been revised and presented in Newman [1977]. Kakar [2002]
successfully employed the Euler solver to solve the heave problem. Figure 5.10
compares the added mass and damping coefficients obtained from the present vis-
cous solver with the coefficients obtained from Euler solver and Newman [1977].
Method to evaluate the hydrodynamic coefficients is presented in Section 3.5.4. The
88

problem was solved for frequencies ranging from 0.4 to 1.4. As mentioned earlier,
the domain size varies with each frequency and depends on the wavelength. The re-
sults compare well with Newman [1977] for the whole range of frequencies. Since
the heave problem is studied solely to validate the method, stringent convergence
studies have not been performed. Hence, slight deviations from the theoretical val-
ues are acceptable and are within tolerable limits.
ω √ D/g
a 22/(
ρB
2),
b 22/(
ρB
2ω
)
0.5 1 1.5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9a22 (Euler)a22 (Viscous)a22 (measured)b22 (Euler)b22 (Viscous)b22 (measured)
Figure 5.10: Comparison of hydrodynamic coefficients for a 2D hull undergoingheave motion obtained from the present solver with those measured by Vugts [1968]as given in [Newman 1977] and Euler solver [Kakar 2002]
Figure 5.12 shows the plots for pressure contours at various time instants ( �� � �� � ,�� � � and � � ) over a time period. It can be observed from the contours in the plots
that the present solver captures the symmetry in the heave problem. The pressure
on the hull is integrated to obtain the forces and moment on the hull as explained
in Section 3.3.1. It is to be noted here that the solver plots the solution at the cell
centers instead of the cell face centers and hence, the boundaries shown in each
89

time/T --->
Non
-dim
ensi
onal
ized
forc
es,F
X,F
Yan
dM
XY
0 0.25 0.5 0.75 1
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6FxFyM
Figure 5.11: Force history for a heaving rectangular hull over one time period andfor
��� � � ��
plot do not represent the actual boundaries. The force in the x-direction and the
moment about the z-axis (pointing out of the plane) are zero on the hull due to the
symmetry involved in the problem. Forces on the hull in the x- and y- directions and
the moment are plotted in Figure 5.11 for a duration of one time period. The wave
elevation � is calculated from its relation with the pressure on the free surface. Wave
profiles at various time steps are shown in Figure 5.13. It is to be noted here that,
since linear wave theory is assumed, the grid points on the free surface boundary
are not moved at each time step in the actual computation. The wave profiles are
captured well and the wave elevation at the intersection point between the hull and
the free surface appears to be smooth without any visible numerical errors.
90

P0.150.130.110.090.060.040.020.00
-0.02-0.04-0.06-0.09-0.11-0.13-0.15
t/T=1.00
P0.150.130.110.090.060.040.020.00
-0.02-0.04-0.06-0.09-0.11-0.13-0.15
t/T=0.75X
-6 -4 -2 0 2 4 6
P0.150.130.110.090.060.040.020.00
-0.02-0.04-0.06-0.09-0.11-0.13-0.15
t/T=0.5
Figure 5.12: Pressure contours at different time steps for a 2D rectangular hull un-dergoing heave motion
91

η/B
-5 0 5-1
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0t/T = 0.5
η/B
-5 0 5-1
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
t/T = 1.0
η/B
-5 0 5-1
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
t/T = 0.75
Figure 5.13: Wave profiles at different time steps for a 2D rectangular hull undergo-ing heave motion
92

5.3.5 Roll Motion
The main objective of the work presented in the current section is to apply the vis-
cous solver to the radiation problem of a 2D floating hull undergoing forced har-
monic roll motion, improve upon the results presented by Kakar [2002] and obtain
hydrodynamic coefficients which compare well with the available results from ex-
periments and other solvers. Two kinds of hulls were considered for the problem;
one without bilge keels and the other with bilge keels attached. The length dimen-
sions are non-dimensionalized with respect to the beam � . Time and velocity terms
are non-dimensionalized as described previously in Section 3.4.2. Non-dimensional
time period and frequency ( are equal to 1 and ��� units respectively.
The bilge is a rounded bilge and its radius is taken equal to 0.02 units (2�
of B).
When present, the bilge keel’s length is taken equal to 0.04 units (4�
of B). The
bisector axis of the bilge keel makes an angle of � � � with the vertical. Description
of the bilge corner and the bilge keel is given in Figure 5.14 [Kakar 2002]. The work
presented in [Kakar 2002] included results for additional lengths equal to 0.02 and
0.06 units. In the present work, only the 4�
bilge keel is considered for the sake of
thorough validation. The solver, once successful in the case of 4�
bilge keel, can
easily be extended to solve problems with other bilge keel lengths. The boundary
conditions applied at the free surface, far and bottom boundaries are the same as
those applied in the heave motion problem and are presented in the previous section.
The roll angle and angular velocity are defined as follows:
� � � � � � � � ( ��
(5.23)
�� � � � ( � � � � ( ��
(5.24)
� � � � ( � � � � ( ��
(5.25)
93

Computational node
KD : Bilge keel depth
Bilgeradius
Bilge Keel
2D Rectangular Hull Cross Section
Figure 5.14: Bilge and keel geometry details
where, � is the roll angle,�� is the angular velocity, � is the total velocity of the
point being considered on the body, is the magnitude of the position vector, � �
is the amplitude of the roll angle and ( is the circular frequency of the harmonic
motion. An amplitude of 0.05 radians is considered for the roll angle. Since the
present solver is a viscous solver, a no-slip boundary condition is applied on the hull
and the corresponding boundary condition is as follows:
� Hull boundary: The boundary conditions are applied at the centers of the faces
that form the boundary;
� � + � � ( � � � � ( ��
� � � � ( � � � � ( ��
(5.26)� �� � � � � � !� �� � !
� � !� � � � " � � !� � �
94

The boundary conditions are also described in the Figure 5.15.
∇ Free Surface
-∂p/∂n = ∂u/∂t + u∂u/∂x + v∂u/∂yu =q
u = 0, ∂p/∂n = 0
Bottom boundary condition
∂2(u,v,p)/∂x2 = -k2(u,v,p)Far boundary condition
∂2(u,v,p)/∂x2 = -k2(u,v,p)
Far boundary condition
∂P/∂t = ρgv , ∂(u,v)/∂y = ω2(u,v)/g
Figure 5.15: Boundary conditions applied for a body undergoing forced harmonicroll motion at the free surface
5.3.6 Results
The intersection of free surface and the hull is a difficult point to deal with due to
the sudden changes in the boundaries and boundary conditions. Hence, a special
treatment is needed while evaluating flow properties at that point. But, in the present
solver treating the intersection point is avoided since the boundary conditions are
applied only at the face centers of the boundary cells and not at the nodal points.
A C-type grid as described in the previous section and shown in Figures 5.8 and
5.9 is used for the problem. The roll problem is also solved for the same range
of frequencies as the heave problem, i.e, 0.4 - 1.4. For the present problem, the
frequency or the Froude number is defined as��� � � ( � �� , where,
�represents the
95

half-beam of the hull. The extent of the domain is chosen such that its magnitude
is greater than at least two wavelengths. The simulations are usually run for a total
of three time periods. The simulation is started with a ramp function to start the
solution smoothly;
� � � � � � � � ( ��
(5.27)
� � � � � � � � � � � ( ��� � � � � ( �
�(5.28)
�� � � � � � � ( � � � � � ( ��� � � � � ( �
� � � � � � ( ��� � � � � � ( �
� �(5.29)
The hyperbolic tangent ramp function ramps up to a value of unity within half a time
period. Once the force history for the last time period is obtained, it is used obtain
the added mass and damping coefficients. The non-dimensional added mass and
damping coefficients are determined from the following expressions [Kakar 2002]:
� ��� � � � � � � �
�
� � � � � � � � � ��� �� �
� (5.30)
� ��� � � � %
� ��� � � � � �
�
� � � � � � � � � � � �� �
�
where, � ��� and� ��� are the added mass and damping coefficients respectively.
� � � � �represents the non-dimensional moment as a function of time. The added mass and
damping coefficients can also be evaluated directly from the moment history plot
over one time period. The added mass coefficient can be found from the value of the
moment at �� � � � � � ( � � � � or �� � ������ � ( � � �& � � , while the damping
coefficient can be found from the value of moment at �� � �� � � ( � � � � or
�� � ��� � ( � � � � � using the following expressions:
96

� ��� �� � � � � �� � � � � �� � � � �� � � � � (5.31)
� ��� � ��� � � � � � � � � � � � �� � � � � (5.32)
The Figure 5.16 also explains how to evaluate � ��� and� ��� from the moment history
plot.
t/T -->
M/(
ρU2 B
2 )
0 0.25 0.5 0.75 1
-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0.05
a66 = M75/(2π2αo)
b66 = -(FnbM100)/(2π2αo)
a66 = M25/(2π2αo)
b66 = -(FnbM50)/(2π2αo)
Figure 5.16: Figure explaining how to evaluate roll added mass and damping coeffi-cients from the moment history plot itself
Hull with no bilge keels:
The pressure contour plots for a hull without bilge keels at various time steps are
presented in Figure 5.18. The solver seems to capture the anti-symmetry involved
in the roll motion well. The time history for hydrodynamic moment (��� � � �� � ) is
97

shown in Figure 5.17. It can be seen from the figure that the force history converges
within 2-3 time periods. As mentioned earlier, the hydrodynamic coefficients are
evaluated using the time history of the converged moment over the last time period.
The coefficients obtained from the present solver are compared with the coefficients
from Euler solver [Kakar 2002] and experimental results from Vugts [1968] in Fig-
ures 5.19 and 5.20. The added mass coefficients are over-predicted by the present
solver. The difference is larger at lower Froude numbers as seen in the figure. And
the values do not differ much from those obtained from both the Euler solver [Kakar
2002] and the BEM solver. There are some discrepancies in the damping coefficient
values as well.
The wave profile and the hull geometry are plotted together for different instants of
time in Figure 5.21.
Time
Non
-dim
ensi
onal
mom
entM
xy/ρ
U2 B
2
1 2 3 4
-0.05
0
0.05
Figure 5.17: Moment history of a hull without bilge keels undergoing harmonic rollmotions for
��� � = 0.8
98

X-4 -2 0 2 4
P0.150.130.110.090.060.040.020.00
-0.02-0.04-0.06-0.09-0.11-0.13-0.15
t/T=0.5
P0.150.130.110.090.060.040.020.00
-0.02-0.04-0.06-0.09-0.11-0.13-0.15
t/T=1.00
P0.150.130.110.090.060.040.020.00
-0.02-0.04-0.06-0.09-0.11-0.13-0.15
t/T=0.75
Figure 5.18: Pressure contour plots at various time instants for a hull without bilgekeels undergoing roll motion
99

ω√b/g
a 66
0.25 0.5 0.75 1 1.25 1.50
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
0.11
0.12
BEMEULERVISCOUSVUGTS’S EXPT
Figure 5.19: Comparison of roll added mass coefficients from the present solverwith those obtained from the BEM solver, the Euler solver [Kakar 2002] and Vugts[1968] for a hull without bilge keels
ω√b/g
b66
0.25 0.5 0.75 1 1.25 1.50
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
0.05
BEMEULERVISCOUSVUGTS’S EXPT
Figure 5.20: Comparison of roll damping coefficients from the present solver withthose obtained from the BEM solver, the Euler solver [Kakar 2002] and Vugts [1968]for a hull without bilge keels
100

η/B
-4 -2 0 2 4-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
t/T=0.5η/
B
-4 -2 0 2 4-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
t/T=0.75
η/B
-4 -2 0 2 4-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
t/T=1.00
Figure 5.21: Wave profiles at various time instants for a hull without bilge keelsundergoing roll motion
101

Hull with bilge keels:
A typical grid used for computations is shown in Figure 5.52. The time history for
hydrodynamic moment (� � � � � ) for a hull with bilge keels is shown in Figure
5.22. The roll added mass and damping coefficients are obtained using the equation
5.30. The coefficients obtained from the present viscous solver are compared with
the results from the Euler solver [Kakar 2002] and the experimental results from
Yeung et al. [2000] in Figures 5.23 and 5.24. As seen from the comparison plots,
the present solver over-predicts the added mass coefficients for lower values of the
Froude number and under-predicts the damping coefficients for higher values of
the Froude number, when compared to the experimental values. And, as observed
earlier in the case of a hull without bilge keels, the coefficient values obtained from
the present solver do not differ much from those obtained from both the BEM solver
and the Euler solver. The damping coefficients are under-predicted by all the solvers
compared to the experimental values. The wave profiles obtained at different instants
of time are plotted along with the hull geometry in Figure 5.25.
Time
Non
-dim
ensi
onal
mom
entM
xy/ρ
U2 B
2
1 2 3 4
-0.1
-0.05
0
0.05
Figure 5.22: Moment history of a hull with 4�
bilge keels undergoing harmonic rollmotions for
��� � = 0.8
102

ω√b/g
a 66
0.25 0.5 0.75 1 1.25 1.50
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
BEMEULERVISCOUSYEUNG’S EXPT
Figure 5.23: Comparison of roll added mass coefficients from the present solverwith those obtained from the BEM solver, the Euler solver [Kakar 2002] and Yeunget al. [2000] for a hull with 4
�bilge keels
ω√b/g
b 66
0.5 0.75 1 1.25 1.50
0.02
0.04
0.06
0.08
0.1
0.12
0.14 BEMEULERVISCOUSYEUNG’S EXPT
Figure 5.24: Comparison of roll damping coefficients from the present solver withthose obtained from the BEM solver, the Euler solver [Kakar 2002] and Yeung et al.[2000] for a hull with 4
�bilge keels
103

-4 -2 0 2 4
-0.4
-0.3
-0.2
-0.1
0
0.1
t/T=0.5
-4 -2 0 2 4-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
t/T=0.75
-4 -2 0 2 4
-0.4
-0.3
-0.2
-0.1
0
0.1t/T=1.00
Figure 5.25: Wave profiles at various time instants for a hull with 4�
bilge keelsundergoing roll motion; The vertical axis represents the wave elevation, � scaled bythe beam length, �
104

Analysis:
The hydrodynamic coefficients for roll are derived from the time history of the mo-
ment over one time period. The moment is calculated from the forces which are in
turn calculated from the pressure on the hull. Hence, accurate prediction of pressure
acting on the hull assumes importance in regard to obtaining coefficients within rea-
sonable limits of tolerance. Also, the wave elevation is evaluated from the pressure
on the free surface. The presence of the free surface also affects the evaluation of
pressure on the hull and in turn the damping of the roll motion. But, the wave profiles
shown in Figures 5.21 and 5.25 for a hull without and with bilge keels respectively
are clearly not smooth and exhibit a discontinuity at the free surface-hull intersec-
tion. Figure 5.26 shows the pressure on the hull with bilge keels for��� � � �� �
plotted versus curve length of the hull at �� � � � . The plot shows comparison
between pressure from the viscous solver and pressure from the BEM solver. For
the pressure obtained from the viscous solver, there is a marked deviation from the
pressures obtained from BEM solver and Yeung et al. [2000] (not shown in the fig-
ure) near the free surface. This can be attributed to the inaccurate prediction of the
pressure on the free surface at each time instant. Also, the pressure has remarkable
oscillations near the bilge keel region. Viscous separation is known to play a major
role in damping the roll motion of a hull, with and without bilge keels. But, it can
be seen from the Figures 5.19 and 5.23 that the present solver is not able to capture
the viscous effects well and hence, does not perform better than the inviscid solvers.
These discrepancies highlight the need for further investigation, both into the free
surface modeling and the formulation of the viscous solver. It is therefore, decided to
uncouple both and investigate each independently so that viscous and vortical flow
effects can be isolated from the free surface effects. The following sections present
105

the work done in order to find the shortcomings in the solver and formulation of the
roll problem.
Figure 5.26: Pressure on the hull with 4�
bilge keels for��� � = 0.8 at �� = 0.8
(The discrepancies between the pressures from the current viscous solver and other solversshown in the figure led to investigation and changes in the formulation of the solver, whichare presented in the succeeding sections of the chapter.)
5.3.7 Roll motion of a semi-circular hull
A simple test to check the pressure evaluation on the hull is to consider a semi-
circular hull undergoing forced harmonic roll motion in the presence of a free sur-
face. If the fluid is considered inviscid and flow is considered irrotational, then, the
pressure on the hull should be equal to zero at any instant of time. The boundary
conditions applied on the free surface, the far boundaries and the bottom boundary
are the same as the conditions used in the case of a rectangular hull undergoing roll
106

motion at the free surface. The kinematic boundary condition on the hull imposes
that the fluid particles on the hull do not have a normal (to the hull surface) compo-
nent of velocity. The irrotationality condition imposes that vorticity is equal to zero.
The hull boundary condition is applied as follows:
�! � � $� � �$�
(5.33)�! �� � �� �� (5.34)� � "� � � � (5.35)
If the velocity at a point on the normal in the tangential direction is denoted by!!"
and�� �� is denoted by � ! , then the x-velocity, y-velocity and the pressure on the hull
are given by:
� � !!" � � � � !
� �(5.36)
� � !!" � � � � !
� �(5.37)� �� � � � � � !� �
� � !� � !� � � � " � � !� � �
(5.38)
A close-up view of the grid near the hull is shown in Figure 5.27. The pressure on
the hull is plotted versus the curve length in the Figure 5.28 at various time instants.
It can be seen that the pressure is zero at all instants of time as expected.
5.4 Submerged hull motions
5.4.1 Fixed coordinate system and fixed grid
To isolate and uncouple the viscous effects from the free surface effects, the motions
of a submerged body (or hull) in infinite fluid are intended to be studied. Hence, an
107

semi circular hull
Figure 5.27: A close-up view of the grid near the semi-circular hull
S (arc length/R)-->
P/(
ρU2)
1 2 3
-4E-08
-3E-08
-2E-08
-1E-08
0
1E-08
2E-08
3E-08
4E-08
t= 0.005t= 0.100t= 0.125t= 0.250
Figure 5.28: Plot of pressure on the semi-circular hull ��� curve length at varioustime instants
108

image of the hull is taken about the line of floatation and the resultant hull, shown in
Figure 5.29, is subject to forced harmonic roll motions surrounded by infinite fluid.
.
Beam, BDraft, D
Bilge Keel
Center of rotation: O
rBLBR
Figure 5.29: Description of the main length parameters for a submerged hull under-going roll motions
At first, a hull without bilge keels is considered. All the length dimensions are non-
dimensionalized with respect to the beam B as in the roll motion of a floating hull.
The%� ratio, the bilge radius and the bilge keel length are equal to the values used
for hull undergoing roll motions at the free surface. The distance between the finite
far boundary and the body is arbitrary. The only criterion in choosing the distance is,
the far boundary should be at least a minimum distance away from the hull such that
the velocities and pressure at the far boundary are not affected by the hull motions.
Figure 5.30 gives the details of the grid used in the present problem. A structured
O-type grid is used and is similar to the grid used in previous study with regard to
the indices. The origin is located at the centroid of the hull and the orientation of the
coordinate axes is the same as that of the axes used in the study of roll motion of a
109

Close up view ofthe grid near the hull
Figure 5.30: a typical grid used for forced harmonic motions of a submerged hull
floating body. The circular shape of the far boundary helps in creating a grid which
is less non-uniform and less non-orthogonal than a square shaped far boundary.
� Boundary Conditions: Exact boundary conditions are applied on the hull, but
the grid and the body are kept fixed. The boundary conditions applied in the
case of roll motion of a floating hull are applied in the current problem. The
only difference is made by the boundaries that act as the free surface in the
floating hull problem, which now coincide with each other and act as a contin-
uum boundary in the present problem. The boundary conditions are described
diagrammatically in Figure 5.31. The values for velocities and pressure on
the continuum boundary are obtained by interpolating the adjacent cell values
on both the sides of the boundary. It is thus ensured that the velocities and
pressure are equal on both the boundaries forming the continuum and the flow
110

is continuous across the boundaries.
U = 0, V = 0
∂P/∂n = 0
Far boundary condition
Continuum Boundary Condition(UA = UB
VA = VB
PA = PB)
U = -yαoωcos(ωt), V = xαoωcos(ωt)
-∂P/∂n = ∂Un/∂t + Un(∂Un/∂n) + Us(∂Un/∂s)
Body boundary condition
A
B
Figure 5.31: Description of boundary conditions applied for the submerged rollproblem
When compared to a 2D Cartesian grid, the body boundary is equivalent to the bot-
tom boundary, the far boundary is equivalent to the top boundary and the continuum
boundary is a coupling between the inflow and the outflow boundaries.
The Reynolds number is evaluated in the similar manner as in the floating body case.
The Reynolds number considered presently is equal to 69503 (= the ��� for��� � �
�� �in floating body case). The roll amplitude is taken equal to 0.05 units. The
forces and moment on the hull are calculated as detailed in Section 3.3.1. Figures
5.32 and 5.33 show the pressure evaluated on the hull at the time instants ��� � � �and ��� � � � � � respectively. As can be seen from the Figure 5.32, there are large
111

S (Arc length/B) -->
P/(
ρU2 )
1 2 3
-0.2
-0.15
-0.1
-0.05
0
Viscous solver (non-moving grid)Potential solvert/T = 2.00
Figure 5.32: Pressure on the submerged hull without bilge keels at �� � � � for anon-moving grid
oscillations in pressure in addition to the single peak in the regions near the bilges.
It is to be noted here that the a sudden substantial rise/drop in the pressure in the
bilge region is expected due to the sudden change in the geometry and nature of
the flow, but, the smaller oscillations are unacceptable. The flow speeds up at the
corner and a peak in the pressure is obtained due to the large magnitude of velocities.
The pressure at ��� � � � ��� is smooth overall when compared to the pressure at
��� � � � � � , but has small local jump in its value at the bilge regions. The occurrence
of these irregularities in the pressure on the hull can be reasoned from the pressure
contour plots at both instants of time. In Figure 5.34, it can be seen that there
pressure oscillations that are spread over reasonable length of the hull near the bilges.
Keeping the body and grid stationary through the duration of the simulation could
be the cause of these pressure patches as the solver might be experiencing memory
or history effects.
112

S (Arc length/B) -->
P/(
ρU2 )
1 2 3
-0.1
-0.05
0
0.05
0.1
Viscous solver (non-moving grid)Potential solvert/T = 2.25
Figure 5.33: Pressure on the submerged hull without bilge keels at �� � � � � for anon-moving grid
X
Y
-1 0 1
-1
-0.5
0
0.5
1
P/ρU2
0.00000-0.00750-0.01500-0.02250-0.03000-0.03750-0.04500-0.05250-0.06000-0.06750-0.07500-0.08250-0.09000-0.09750-0.10500
Figure 5.34: Pressure contours around the submerged hull without bilge keels at�� � � � for a non-moving grid
113

X
Y
-1 0 1
-1
-0.5
0
0.5
1
P/ρU2
0.100000.085710.071430.057140.042860.028570.014290.00000
-0.01429-0.02857-0.04286-0.05714-0.07143-0.08571-0.10000
Figure 5.35: Pressure contours around the submerged hull without bilge keels at���� � � for a non-moving grid
5.4.2 Fixed coordinate system and moving grid
An alternative approach to the problem of submerged roll motion is to move the
grid along with the body while keeping the inertial coordinate system fixed at each
instant of time. This approach is the correct approach and is without any small mo-
tion assumptions. It is expected to remove the memory effects experienced in the
previous approach. It is advantageous while applying the solver to large motions of
the hull as well. Keeping the coordinate system fixed helps in doing without a coor-
dinate transformation every time for the velocities and the grid locations. But, when
the grid is moved every time step, the location of each computational node changes
with time. This is not the case in an Eulerian approach to solving fluid flow prob-
lems, where the attention is focused at a point fixed in space. Hence, a Lagrangian
approach has to be incorporated in time to modify the way time dependent variables
114

are calculated at each node in the current scheme. At a particular node, the unsteady
term in the x-momentum is treated in the following fashion.
� �� �� � �
� � � !
� � � � � �� � � !� � � � � �� + � (5.39)
The � operator is the same operator used in the potential solver for calculating pres-
sure in the case of a moving submerged body. The unsteady term in the y-momentum
equation is treated in the same manner. When the above expression is substituted
for the unsteady term in the momentum equation, a new set of momentum equations
are obtained:
� � �� �
� � � � !� � � � � � � �� � � � � � !
� � � � � � � �� + � � � �� � ��� � �
� � � � (5.40)
where, � � denotes either � or � depending on whether the momentum equation is
written in the x-direction or the y-direction. Since the velocity of a fluid particle
on the body is equal to the velocity of the body at that point (no-slip boundary
condition), the convective terms in the above momentum equations vanish on the
body boundary. A special care needs to be taken while using the Crank-Nicolson
scheme for solving the problem. While evaluating the derivatives at the� ��� time
step, old locations of the corresponding points need to be considered and hence, it is
necessary for the scheme to store the geometry data of the previous time step.
The modification is explained diagrammatically in Figure 5.36. In the figure the
body is shown at two successive time steps and the movement of an arbitrary node is
followed. The movement of the hull is exaggerated in order to present the changes
115

t
t + ∆t
1
2∆Y
∆X
∇U/∇t = (U(2,t+∆t) - U(1,t))/∆t
unode = ∆X/∆t
vnode = ∆Y/∆t
Figure 5.36: Figure explaining the terms used in transformation of the unsteady termin the Navier-Stokes equations for a moving grid in a fixed inertial coordinate system
clearly. Figure 5.37 shows the positions of the body and the grid at two time instants;
���� � � and �� �� � � , with one overlapped over the other. It is to be noted here that
only cell centers are plotted and hence the boundaries do not represent the bound-
aries of the actual geometry. Figures 5.38 and 5.39 show the pressure on the hull
at �� � � � and �� � � � � plotted versus the hull arc length. The plots compare the
pressure obtained from viscous solver with that obtained from the potential solver. It
is clear from the Figure 5.38 that the spikes observed in the pressure in Figure 5.32
are smoothed out and what have been understood as memory effects are not present
anymore. Also, the pressure from the viscous solver compares very well with the
pressure obtained from the potential solver. The pressure evaluation method in the
potential solver has been validated in Section 3.4.1 and hence, the potential solver
results can be used as a benchmark though they are purely inviscid results. The pres-
116

X
Y
0.3 0.4 0.5 0.6 0.70.3
0.4
0.5
0.6
______ t/T = 2.00
........ t/T = 2.25
Figure 5.37: Grid orientation for a submerged hull without bilge keels at �� � � �and �� � � � �
sures from both the solvers compare well at both �� � � � � and �� � � � � . This can
be attributed to the fact that the effect of viscosity and vorticity are minimal in the
present problem. This can be observed clearly from the vorticity plots shown later
in the section. These results need to be validated by running the solver with inviscid
fluid assumption and comparing the resulting pressure with the pressure obtained
from the potential solver.
Added Mass coefficient
The forces are obtained from pressure as explained in Section 3.3.1. And the added
mass coefficient for roll motion of the submerged hull is evaluated from the expres-
sion obtained in Section 3.4.1. The added mass coefficient can also be evaluated
from the moment history plot using the equation 5.31 by multiplying the resultant
added mass coefficient with �� � to account for the image of the hull in the submerged
117

S (Arc length/B) -->
P/(
ρU2 )
1 2 3
-0.2
-0.15
-0.1
-0.05
0
Viscous Solver (moving grid)Potential Solver
Figure 5.38: Pressure evaluated on the submerged hull without bilge keels at ���� � using a fixed coordinate system and a moving grid in the case of viscous solver
S (Arc length/B) -->
P/(
ρU2 )
1 2 3
-0.1
-0.05
0
0.05
0.1
Viscous Solver (moving grid)Potential Solver
Figure 5.39: Pressure evaluated on the submerged hull without bilge keels at �� �� � � using a fixed coordinate system and a moving grid in the case of viscous solver
118

X
Y
-1 0 1-1
-0.5
0
0.5
1
P/ρU2
0.0000-0.0075-0.0150-0.0225-0.0300-0.0375-0.0450-0.0525-0.0600-0.0675-0.0750-0.0825-0.0900-0.0975-0.1050
Figure 5.40: Pressure contours around the submerged hull without bilge keels at���� � �
X
Y
-1 0 1-1
-0.5
0
0.5
1
P/ρU2
0.10000.08570.07140.05710.04290.02860.01430.0000
-0.0143-0.0286-0.0429-0.0571-0.0714-0.0857-0.1000
Figure 5.41: Pressure contours around the submerged hull without bilge keels at���� � ���
119

case;
� ��� �� � � � � � � � � � �� � � � �� � � � � (5.41)
The hydrodynamic moments from both viscous and potential solvers are compared
with each other in Figure 5.42 for one time period. The added mass coefficients are
tabulated and compared with each other in Table 5.1. As observed from the moment
comparison plot and Table 5.1, the difference in the added mass coefficients obtained
from the two solvers is very small.
Solver Viscous Potential� ��� 4.22524E-02 4.312122E-02
Table 5.1: Comparison of roll added mass coefficients obtained from viscous andpotential solvers for a submerged hull without bilge keels undergoing roll motion
Figures 5.43, 5.44, 5.45 and 5.46 show the converged flow field at four different
time instants over the last period of the simulation for the hull without bilge keels.
Since separation effects are minimal for a rounder bilge corner, strong vortices are
not created. It can be seen in the figures that the vorticity created is small and is very
local in the bilge region.
5.4.3 Convergence Studies
To validate the results obtained for a submerged hull without bilge keels undergo-
ing a forced harmonic roll motion, a grid study is performed. The convergence of
pressure and hydrodynamic moment on the hull is checked for increasing number of
cells keeping the domain size constant. Simulations are performed for only one time
120

t/T -->
M/ρ
U2 B
2
0 0.25 0.5 0.75 1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
VISCOUSBEM
Figure 5.42: Comparison between hydrodynamic moment obtained from viscousand potential solvers for a submerged hull without bilge keels undergoing roll mo-tion
X
Y
-0.5 0 0.5
-0.6
-0.4
-0.2
0
0.2
0.4
0.6Z Vorticity(Normalized)
0.17860.10000.0214
-0.0572-0.1357-0.2143-0.2929-0.3714-0.4500-0.5286-0.6071-0.6857-0.7643-0.8429-0.9214
t = 0
Figure 5.43: Flow field with respect to the submerged moving hull without bilgekeels, shown around the hull at time instant � ��
121

X
Y
-0.5 0 0.5
-0.6
-0.4
-0.2
0
0.2
0.4
0.6Z Vorticity(Normalized)
0.26620.18180.09740.0130
-0.0714-0.1558-0.2403-0.3247-0.4091-0.4935-0.5779-0.6623-0.7468-0.8312-0.9156
t = T/4
Figure 5.44: Flow field with respect to the submerged moving hull without bilgekeels, shown around the hull at time instant � �� � �
X
Y
-0.5 0 0.5
-0.6
-0.4
-0.2
0
0.2
0.4
0.6Z Vorticity(Normalized)
0.92060.84120.76180.68240.60300.52360.44420.36480.28540.20600.12660.0472
-0.0322-0.1116-0.1910
t = T/2
Figure 5.45: Flow field with respect to the submerged moving hull without bilgekeels, shown around the hull at time instant � �� ���
122

X
Y
-0.5 0 0.5
-0.6
-0.4
-0.2
0
0.2
0.4
0.6Z Vorticity(Normalized)
0.91350.82710.74060.65420.56770.48120.39480.30830.22180.13540.0489
-0.0375-0.1240-0.2105-0.2969
t = 3T/4
Figure 5.46: Flow field with respect to the submerged moving hull without bilgekeels, shown around the hull at time instant � �� �� �
period to save computational time. The convergence study is performed on grids of
three different sizes; 224 x 78, 272 x 78 and 320 x 78. While denoting the size of the
grid, number of grid points along the hull or the�
index is given by the first number
and the number of grid points along the�
index is given by the second. The number
of grid points along the�
index is kept constant but the expansion ratio is varied
such that an increase in the number of grid points on the hull is complimented by
an increase in the expansion ratio. An increase in the expansion ratio creates larger
cells near the far boundary and smaller cells near the hull. Figure 5.47 compares
the densities of the grids close to the hull. Figures 5.48, 5.49 and 5.50 compare the
pressure on the hull obtained for the three different grids at three instants of time.
The hydrodynamic moment on the hull for one time period is also compared for the
three grids and is shown in Figure 5.51. All the comparison plots show that the solu-
tion converges to the expected solution with increasing number of cells. Numerical
123

accuracy can be compromised to some extent by performing the simulations with a
grid coarser than the finest grid in order to save computational time.
5.4.4 Hull with bilge keels
The solver is also applied to model the roll motions of a hull with bilge keels. The
simulations are run for just one time period for different Reynolds numbers and
the results are compared for varying Reynolds number to investigate the effect of
Reynolds number on the solution. The pressures for varying Reynolds numbers
are compared at three different time instants; �� � �� � � � �� � � � � � � � and are
plotted in Figures 5.53, 5.54 and 5.55. As can be seen from the figures, the solution
does not vary much when the Reynolds number is increased from � � ��� to� � ��� � .
The solution diverges for all the Reynolds numbers near �� � �� � � � and this can
be seen in Figure 5.55. The viscous solver results for pressure are compared with
potential solver results in Figures 5.56 and 5.57. Results for the bilge keels are very
preliminary in nature and hence, the differences between the pressures from the
two solvers cannot be attributed to just the viscosity and separation effects without
stringent validation tests. The moment history for the first time period is compared
between the two solvers in Figure 5.58. The divergence of the solution in the viscous
solver case is clearly seen in the figure.
124

X
Y
0.25 0.5 0.75 1
-0.6
-0.5
-0.4
-0.3
272 x 78
X
Y
0.25 0.5 0.75 1
-0.6
-0.5
-0.4
-0.3
320 x 78
X
Y
0.25 0.5 0.75 1
-0.6
-0.5
-0.4
-0.3
224 x 78
Figure 5.47: Comparison of the grid densities around the submerged hull withoutbilge keels used in the convergence study
125

S (arc length/B) -->
P/(
ρU2 )
1 2 3
-0.1
-0.05
0
0.05
0.1
224 x 78272 x 78320 x 78
t/T = 0.25
Figure 5.48: Comparison of the pressure on the submerged hull without bilge keelsfor increasing number of cells at �� � �� � ���
S (arc length/B) -->
P/(
ρU2 )
1 2 3-0.2
-0.15
-0.1
-0.05
0
224 x 78272 x 78320 x 78
t/T = 0.50
Figure 5.49: Comparison of the pressure on the submerged hull without bilge keelsfor increasing number of cells at ���� �� ��� �
126

S (arc length/B) -->
P/(
ρU2 )
1 2 3
-0.1
-0.05
0
0.05
224 x 78272 x 78320 x 78
t/T = 0.90
Figure 5.50: Comparison of the pressure on the submerged hull without bilge keelsfor increasing number of cells at ���� ���� � �
t/T -->
M/(
ρU2 B
2)
0.25 0.5 0.75 1
-0.15
-0.1
-0.05
0
0.05
0.1224 x 78272 x 78320 x 78
Figure 5.51: Comparison of the hydrodynamic moment on the submerged hull with-out bilge keels between three different grids for the first time period
127

Close up view ofthe grid near the hull
Figure 5.52: a typical grid used for computation of forced harmonic motions of asubmerged hull with bilge keels
S (arc length/B) -->
P/(
ρU2)
1 2 3 4
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
Re 1000Re 10000Re 20000Re 69503
t/T = 0.25
Figure 5.53: Comparison of the pressure on the submerged hull with bilge keelsundergoing roll motion for varying Reynolds number at �� � � � �
128

S (arc length/B) -->
P/(
ρU2)
1 2 3 4-0.2
-0.15
-0.1
-0.05
0
Re 1000Re 10000Re 20000Re 69503
t/T = 0.5
Figure 5.54: Comparison of the pressure on the submerged hull with bilge keelsundergoing roll motion for varying Reynolds number at �� � � ���
S (arc length/B) -->
P/(
ρU2)
1 2 3 4
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
Re 1000Re 10000Re 20000Re 69503
t/T = 1.00
Figure 5.55: Comparison of the pressure on the submerged hull with bilge keelsundergoing roll motion for varying Reynolds number at �� � � � �
129

S (arc length/B)-->
P/(
ρU2)
1 2 3 4
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
ViscousPotential
t/T = 0.25
Figure 5.56: Comparison of the pressure on the submerged hull with bilge keelsundergoing roll motion between viscous and potential solvers at �� � �� � �
S (arc length/B)-->
P/(
ρU2)
1 2 3 4
-0.2
-0.15
-0.1
-0.05
0
ViscousPotential
t/T = 0.5
Figure 5.57: Comparison of the pressure on the submerged hull with bilge keelsundergoing roll motion between viscous and potential solvers at �� � �� ���
130

time -->
M/(
ρU2B
2 )
0.25 0.5 0.75 1-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
ViscousPotential
Figure 5.58: Comparison of the hydrodynamic moment on the submerged hull withbilge keels undergoing roll motion between viscous and potential solvers for the firsttime period
131

Chapter 6
Conclusions and Recommendations
6.1 Conclusions
FPSOs operating in deep waters need to remain stationery for long durations of time.
But, they encounter various environmental loads which result in motions in all the
six degrees of freedom. Of these motions, roll motion is a cause of serious concern.
Bilge keels are one among the many anti-roll devices in use. The goal of the present
work is to study the roll motion and investigate the effectiveness of the bilge keels
in mitigating roll motions of FPSO hulls.
Conventional numerical solvers have been based on potential theory and have proved
adequate in studying most of the problems concerning sea keeping and ship manoeu-
vring. But, in the case of ship roll motions, the potential solvers have proved grossly
inadequate due to the major role the viscosity and separation effects play in damp-
ing of the motion. The empirical methods developed to improve upon the potential
solvers have proved satisfactory on conventional body forms but fail in case of ad-
vanced and complex hull designs. Hence, a robust numerical solver is the present
need in order to study and predict roll motions accurately. Accurate prediction of
roll motion can help in determining loads on the deck and also the range of operabil-
ity of the vessel. A solver which incorporates viscosity effects into its formulation
132

can fill in the gaps left by conventional solvers.
In the current work, a method based on 2D finite volume method has been developed
for solving the unsteady Navier-Stokes equations for laminar flows. Since the free
surface waves also play an important role in roll damping, free surface modeling
based on linear wave theory has been included in the solver. The method is based
on a structured, non-uniform, colocated grid scheme and incorporates a pressure
correction scheme based on SIMPLE method developed by Patankar [1980]. In the
colocation grid scheme, all the main variables are stored at the cell centers. This
approach deviates from the previous scheme developed by Kakar [2002], in which
the variables are stored at cell corners or nodes. Having the control volume centered
around the cell centers is advantageous over the nodal scheme as the need to treat
singularity points on the boundary is absent. The method is based on the Crank-
Nicolson scheme and hence, is implicit in nature.
In order to validate the method, the solver has been applied to a few standard prob-
lems which have analytical solutions. The solver has been applied to the channel
flow problem and is able to produce the expected parabolic profile in the fully devel-
oped flow region downstream of the inlet. It also proved successful in capturing the
wave profile of a given set of progressive waves in deep water conditions. The prob-
lem of a floating hull undergoing forced harmonic heave motion has been solved
and the hydrodynamic coefficients obtained from the solver compare well with the
values from other methods and experiments. Next, the solver has been applied to
the problem of forced harmonic roll motions of a floating hull, with and without
bilge keels. The hydrodynamic coefficients obtained from the present method over
predict the added mass coefficients and under predict the damping coefficients when
133

compared to the experimental values. Also, there has not been much improvement
over the results from the Euler solver. A thorough analysis has been launched to
look in to and find out the reasons for the inadequacies of the current method and
its formulation. An erroneous pressure distribution on the hull formed a motivation
behind uncoupling the free surface effects and viscous effects and investigating them
independently. The problem has been scaled down by considering the roll motions
of a submerged hull in the absence of the free surface. The assumption of small mo-
tions has been withdrawn and a moving grid with a fixed inertial coordinate system
was used to solve the problem. A Lagrangian transformation in time was imposed
and the results obtained for a hull without bilge keels compare well with the much
validated BEM solver results.
Finally, a tip-vortex tracking method based on potential flow theory has been devel-
oped and preliminary results have been obtained. Expected wake pattern is simu-
lated behind a 2D hydrofoil subjected to a uniform inflow and a sinusoidal lateral
gust.
6.2 Recommendations
The present solver has some distance to traverse before it can meet the ultimate
objective of modeling the viscous separated flow around a rolling FPSO vessel. The
following could be implemented in the future to achieve the final objective:
� In the case of hull roll motions at the free surface, the grid in the domain
needs to be re-meshed every time step according to the movement of the body.
Moving the body and the grid has proved to be successful in the submerged
134

body case and hence, it needs to be implemented in the floating body case too.
� A free surface tracking method based on the non-linear boundary condition is
more accurate than a method based on the linear boundary condition. And if
developed, it could prove better than the present method which is based on the
linear boundary conditions, in the case of FPSO hull roll motions, especially
at larger roll angles.
� The solver can be extended into three dimensions using two approaches; one is
to apply strip theory to the 2D hydrodynamic coefficients obtained for various
sections of the hull and the second is to develop a 3D Navier-Stokes solver by
including the z-momentum equation. Clearly the latter will be more accurate,
but also considerably more computer intensive than the former. The 3D NS
solver will also be able to predict lifting effects of the bilge keels, especially
when surge motion is coupled with the roll motion.
� The vortex tracking method needs to be developed successfully for an oscil-
lating flow past a flat plate or a bilge keel. Once successfully employed for
flow past the flat plate, the method can be applied to flows past the bilge keels
attached to hull forms in the presence of a free surface. The results from this
method should require less computer time to obtain. The current NS solver
can then be used to assess the accuracy of this simplified approach.
135

Bibliography
Alessandrini, B. and Delhommeau, G. (1995). A multigrid velocity-pressure-free
surface elevation fully coupled solver for turbulent incompressible flow around a
hull calculations. In Proceedings of Ninth International Conference on Numerical
Methods in Laminar and Turbulent Flows, pages 1173–1184, Atlanta, USA.
Bearman, P. W., Downie, M. J., and Graham, J. M. R. (1982). Vortex shedding from
bluff bodies in oscillatory flow. In Proceedings of the � ��� ONR Symposium on
Ship Hydrodynamics, Ann Arbor, Michigan, USA.
Bearman, P. W. and Graham, J. M. R. (1980). Vortex shedding from bluff bodies in
oscillatory flow. Journal of Fluid Mechanics, 99:pp. 401–430.
Bishop, R., Atsavapranee, P., Percival, S., Shan, J., and Engle, A. (2004). An in-
vestigation of viscous roll damping through the application of particle image ve-
locimetry. In Proceedings of Twenty-Fifth Symposium on Naval Hydrodynamics,
St. John’s, Canada.
Braathen, A. and Faltinsen, O. M. (1988a). Application of vortex tracking method to
roll damping. Advances in underwater technology, Ocean Science and Offshore
Engineering, 15:pp. 177–193.
Braathen, A. and Faltinsen, O. M. (1988b). Interaction between shed vorticity, free
136

surface waves and forced roll motion of a two-dimensional floating body. Fluid
dynamics Research, 3:pp. 190–196.
Brown, D. T. and Patel, M. H. (1985). A theory for vortex shedding from the keels
of marine vehicles. Journal of Engineering Mathematics, 19:pp. 265–195.
Choi, J. (2000). Vortical Inflow – Propeller Interaction Using Unsteady Three-
Dimensional Euler Solver. PhD thesis, Department of Civil Engineering, The
University of Texas at Austin.
Choi, J. and Kinnas, S. (2003). Prediction of unsteady effective wake by an eu-
ler solver/vortex-lattice coupled method. Journal of Ship Research, Vol. 47,
pp.131 144.
Choi, J.-K. and Kinnas, S. (2000). An unsteady 3-D Euler solver coupled with a cav-
itating propeller analysis method. In 23rd Symposium on Naval Hydrodynamics,
Val de Reuil, France.
Christiansen, J. P. (1973). Numerical simulation of hydrodynamics by a method of
point vortices. Journal of Computational Physics, 13:pp. 363.
Clements, R. R. and Maull, D. J. (1975). The representation of sheets of vorticities
by discrete vortices. Progress in Aerospace Science, 16:pp. 129–146.
Cozens, P. D. (1987). Numerical Modelling of the roll damping of ships due to vortex
shedding. PhD thesis, Dept. of Aeronautics, Univ. of London.
Downie, M., Graham, J., and Zheng, X. (1974). Effect of viscous damping on
the response of floating bodies. In Proceedings of � ��� Symposium on Naval
Hydrodynamics, pages 149–155, Ann Arbor, Michigan, USA.
137

Downie, M. J., Graham, J. M. R., and Zheng, X. (1991). Effects of viscous damping
on the response of floating bodies. In Proceedings of Eighteenth Symposium on
Naval Hydrodynamics, Ann Arbor, Michigan, USA.
Faltinsen, O. and Sortland, B. (1987). Slow drift eddy making damping of a ship.
Applied Ocean Research, 9(1):pp. 37–46.
Faltinsen, O. M. and Pettersen, B. (1987). Application of a vortex tracking method to
separated flow around marine structures. Journal of Fluids and Structures, 1:pp.
217–237.
Felli, M., Di Felice, F., and Lugni, C. (2004). Experimental study of the flow field
around a rolling ship model. In Proceedings of Twenty-Fifth Symposium on Naval
Hydrodynamics, St. John’s, Canada.
Ferziger, J. H. and Peric, M. (2002). Computational methods for fluid dynamics.
Fink, P. T. and Soh, W. K. (1974). Calculation of vortex sheets in unsteady flow
and applications in ship hydrodynamics. In Proceedings of Tenth Symposium on
Naval Hydrodynamics, pages 463–491, Cambridge, USA.
Gentaz, L., Alessandrini, B., and Delhommeau, G. (1997). Simulation num �� rique en
fluide visqueux du probl �� me bidimensionnel de radiation par un corps percant la
surface libre. In Proc. 6e Journ �� es de l’Hydrodynamique, pages 287–300, Nantes,
France.
Graham, J. M. R. and Cozens, P. D. (1988). Vortex shedding from edges including
viscous effects. Fluid dynamics Research, 3:pp. 111–115.
138

Himeno, Y. (1981). Prediction of ship roll damping - state of the art. Technical
Report 239, Dept. Naval Arch.�
Mar. Engg., Univ. of Michingan.
Ikeda, Y., Himeno, Y., and Tanaka, N. (1977). On the eddymaking component of
rolling damping force. pages 54–64.
Irvine, M., Longo, J., and Stern, F. (2004). Towing tank tests for surface combat-
ant for free roll decay and coupled pitch and heave motions. In Proceedings of
Twenty-Fifth Symposium on Naval Hydrodynamics, St. John’s, Canada.
Kakar, K. (2002). Computational modeling of fpso hull roll motions and two-
component marine propulsion systems.
Kasten, M. (2002). An overview of a few common roll attenuation strategies for
motor yachts and motor sailors.
Kinnas, S. A., Yu, Y.-H., Lee, H., and Kakar, K. (2003). Modeling of oscillating
flow past a vertical plate. In Proceedings of the � ��� Internation Offshore and
Polar Engineering Conference, pages 218–226, Honolulu, Hawaii, USA.
Klaka, K. (2001). A simplified roll model. Technical Report 2001-09, Center for
Marine Science and Technology, Curtin University of Technology, Perth, Aus-
tralia.
Korpus, R. A. and Falzarano, J. M. (1997). Prediction of viscous ship roll damping
by unsteady navier-stokes techniques. Journal of Offshore Mech Arctic Eng, Trans
ASME, 119:pp. 108–113.
Lee, H. S. (2002). Modeling of Unsteady Wake Alignment and Developed Tip Vortex
Cavitation. PhD thesis, Department of Civil Engineering, The University of Texas
at Austin.
139

Leonard, B. P. (1979). A stable and accurate convection modelling procedure based
on quadratic upstream interpolation. Computational Methods in Applied Mech.
Engineering, 19:pp. 59–98.
Mangler, K. and Smith, J. (1970). Behaviour of the vortex sheet at the trailing edge
of a lifting wing. The Aeronautical Journal of the Royal Aeronautical Society,
Vol. 74.
Miller, R., Gorski, J., and Fry, D. (2002). Viscous roll predictions of a cirular cylin-
der with bilge keels. In Proceedings of Twenty-Fourth Symposium on Naval Hy-
drodynamics, Fukuoka, Japan.
Newman, J. N. (1977). Marine Hydrodynamics. MIT Press.
Patankar, S. (1980). Numerical Heat Transfer and Fluid Flow. Hemisphere Pub-
lishing, New York.
Pullin, D. (1978). The large-scale structure of unsteady self-similar rolled-up vortex
sheets. Journal of Fluid Mechanics, 88:401–430.
Rott, N. (1956). Diffraction of a weak shock with vortex generation. Journal of
Fluid Mechanics, 1:pp. 111–128.
Sarkar, T. and Vassalos, D. (2000). A rans based technique for simulation of the
flow near a rolling cylinder at the free surface. Journal of Marine Science and
Technology, 5:pp. 66–77.
Sarpkaya, T. and O’Keefe, J. (1995). Oscillating flow about two- and three di-
mensional bilge keels. In Proceedings of the � ��� International Conference on
140

Offshore Mechanics and Arctic Engineering, pages 263–270, Copenhagen, Den-
mark.
Smith, J. (1968). Improved calculations of leading-edge seperation from slender,
thin, delta wings. In Proceedings of the Royal Society of London,Series A, volume
306, pages 67–90.
Standing, R. G., Cozens, P. D., and Downie, M. J. (1988). Numerical prediction of
roll damping and response of ships and barges, based on discrete vortex method.
In Proceedings of Computer Modelling in Ocean Engineering, Balkema, Rotter-
dam, Netherlands.
Sturova, I. and Motygin, O. (2002). Radiation problem for an interface-piercing
cylinder in a two-layer fluid. In � ��� International Workshop on Water Waves and
Floating Bodies, Cambridge, UK.
Tanaka, N. (1960). A study on the bilge keels. part 4. on the eddymaking resistance
to the rolling of a ship hull.
Vinayan, V. (2004). University/Navy/Industry Consortium on Cavitation Perfor-
mance of High Speed Propulsors - Presentations and Progress Reports - � "� Steer-
ing Committee Meeting. Dept. of Civil Engineering, UT Austin.
Vugts, J. (1968). The hydrodynamic coefficients for swaying, heaving and rolling
cylinders in a free surface. In International Shipbuilding Progress, volume 15,
pages pp. 251–276.
Wilson, R. and Stern, F. (2002). Unsteady rans simulation of a surface combatant
with roll motion. In Proceedings of Twenty-Fourth Symposium on Naval Hydro-
dynamics, Fukuoka, Japan.
141

Yeung, R. and Ananthakrishnan, P. (1992). Oscillation of a floating body in a viscous
fluid. Journal of Engineering Mathematics, 26:pp. 211–230.
Yeung, R., Cermelli, C., and Liao, S.-W. (1996). Vorticity fields due to rolling
bodies in a free surface - experiment and theory. In Proceedings of Twenty-First
Symposium on Naval Hydrodynamics, Trondheim, Norway.
Yeung, R., Liao, S.-W., and D., R. (1998). Hydrodynamic coefficients of rolling
rectangular cylinders. International Journal of Offshore and Polar Engineering,
8(4):pp. 241–250.
Yeung, R., Roddier, D., Liao, S.-W., Alessandrini, B., and Gentaz, L. (2000). On
roll hydrodynamics of cylinders fitted with bilge keels. In Proceedings of Twenty-
Third Symposium on Naval Hydrodynamics, Val De Reuil, France.
Yeung, R. and Vaidhyanathan, M. (1994). Highly separated flow near a free surface.
In Proceedings of Int. Conference on Hydrodynamics, Wuxi, China.
142

Vita
Bharani Kumar Kacham was born to K. Prakash and K. Neeraja on December
18th, 1980 in the state of Andhra Pradesh, India. He finished his high schooling
at Vasavi Public School, Hyderabad in 1996 and after completing two years of pre-
professional schooling, joined the prestigious Indian Institute of Technology Madras
at Chennai. After receiving a Bachelor of Technology degree in Naval Architecture
and Ocean Engineering in 2002, he joined the University of Texas at Austin to pursue
a Masters degree in Civil Engineering with a focus on Ocean Engineering.
Permanent address: Flat-1, Shailaja Apartments, Tv TowerMalakpet, Hyderabad - 500036, India
This thesis was typeset with LATEX�
by the author.
�LATEX is a document preparation system developed by Leslie Lamport as a special version of
Donald Knuth’s TEX Program.
143





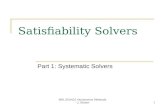



![A new implicit algorithm with multigrid for unsteady ... · inviscid flows by Rizzi and Eriksson 141, Dreyer [5] has applied it to low speed two-dimensional airfoils, and Farmer et](https://static.fdocuments.net/doc/165x107/5edbf793ad6a402d66666d37/a-new-implicit-algorithm-with-multigrid-for-unsteady-inviscid-flows-by-rizzi.jpg)







