Institute of Systems Optimization · Institute of Systems Optimization Combining Laser Range...
23
Institute of Systems Optimization Institute of Systems Optimization Combining Laser Range Measurements and a Dual-IMU IPNS Dipl.-Ing. Christian Ascher for Precise Indoor SLAM Dipl.-Ing. Christoph Keßler Prof. Gert Trommer www.ite.uni-karlsruhe.de Institute of Systems Optimization
Transcript of Institute of Systems Optimization · Institute of Systems Optimization Combining Laser Range...
Institute of Systems OptimizationInstitute of Systems Optimization
Combining Laser Range Measurements and a Dual-IMU IPNS
Dipl.-Ing. Christian Ascher
g gfor Precise Indoor SLAM
p gDipl.-Ing. Christoph KeßlerProf. Gert Trommer
www.ite.uni-karlsruhe.deInstitute of Systems Optimization

Motivation
Dual-IMU Integrated Pedestrian Navigation System (IPNS)
DRDR
High accuracy with Zero Velocity Updates on the foot
Dynamics of torso mounted VISION sensor DRDR
ZVU
Tight integration with VISION
Example: ZVUZVUExample:
Combining with LASER measurements
ZVU
IMULaser
Christian Ascher 03.08.2009Institute of Systems Optimization1

Agenda
Integrated Pedestrian Navigation System (IPNS)
Dead Reckoning(DR) & Zero Velo Updates(ZVU)
Dual-IMU approach
OrthoSLAM
OrthoSLAM Algorithm from V.Nguyen, ETH Zurichg g y ,
Combining Laser Range Measurements and a Dual-IMU IPNS
ConclusionConclusion
Christian Ascher 03.08.20092 Institute of Systems Optimization
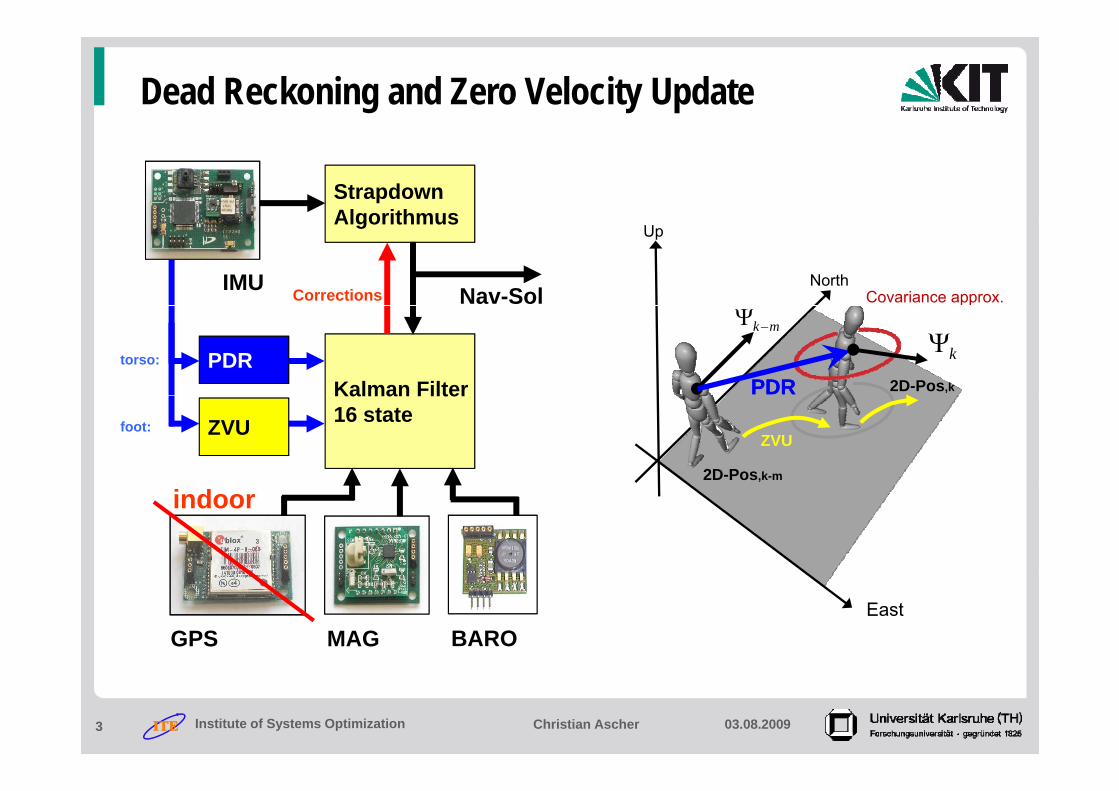
Dead Reckoning and Zero Velocity Update
StrapdownAlgorithmusAlgorithmus
IMU Corrections Nav-Sol
Up
NorthCovariance approx.
Kalman FilterPDRtorso:
PDRPDR
mk−ΨkΨ
2D-Pos,kKalman Filter16 stateZVUfoot:
2D-Pos,k-m
ZVU
indoor
MAGGPS BAROEast
Christian Ascher 03.08.20093 Institute of Systems Optimization

Foot vs. Torso
ADIS16355
Time = 10 minDi t 850
Torso
thth
Distance = 850m
Nor
tN
ort
Foot
East
East Reference
Christian Ascher 03.08.20094 Institute of Systems Optimization
Quelle: Google Inc., Google Maps
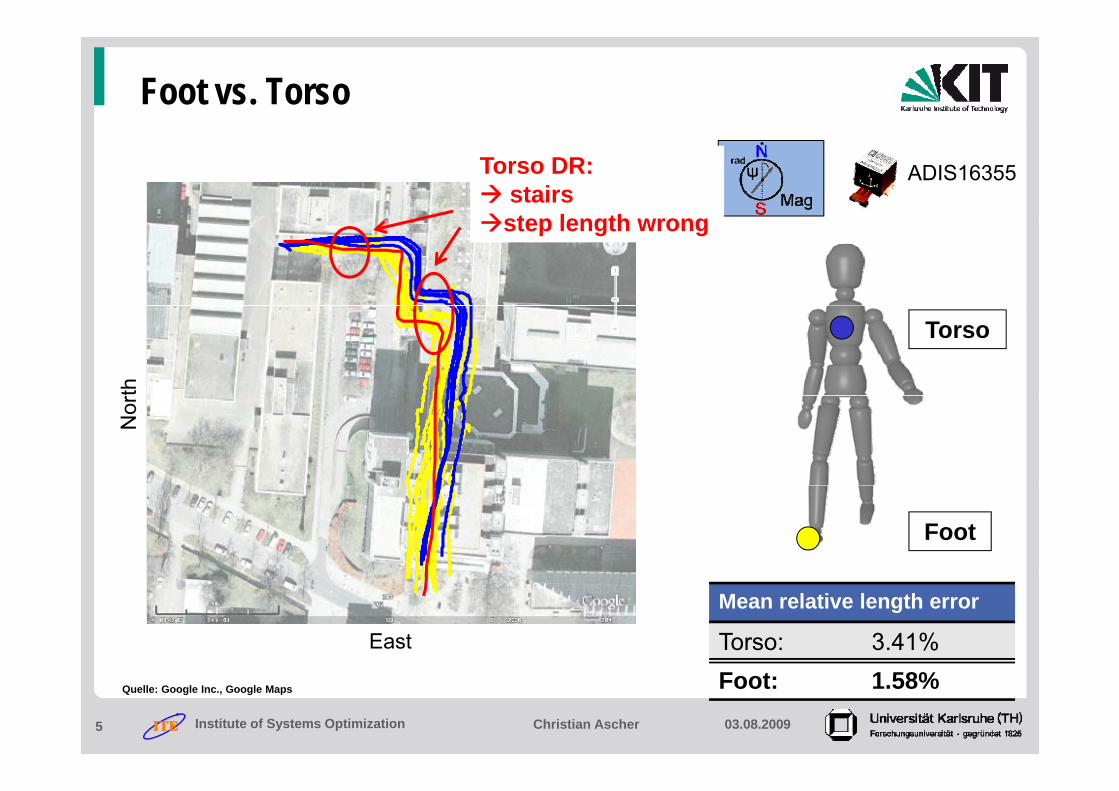
Foot vs. Torso
ADIS16355Torso DR:stairst l thstep length wrong
rth
Torso
Nor
Foot
East
Mean relative length error
Torso: 3.41%
Christian Ascher 03.08.20095 Institute of Systems Optimization
Quelle: Google Inc., Google Maps Foot: 1.58%

Zero Velocity Update
ADIS16355
Indoor (reinforced concrete)Indoor (reinforced concrete)
Torso
h (1
4m)
Nor
t
FootEast (30m)
Mean relative length error:
Torso: 5.20%
Christian Ascher 03.08.20096 Institute of Systems Optimization
Fuß: 2.34%

Dual-IMU IPNS: Combining individual advantages
BarometerMagnetic field0
5
0
5
0
5
0
5 Height information curve dynamics
1
1.5
2Baro
met
ers
1
1.5
2Baro
met
ers
1
1.5
2Baro
met
ers
1
1.5
2Baro
met
ers
Das Bild kann nicht angezeigt werden. Dieser Computer verfügt möglicherweise über zu wenig Arbeitsspeicher, um das Bild zu öffnen, oder das Bild ist beschädigt. Starten Sie den Computer neu, und öffnen Sie dann erneut die Datei. Wenn weiterhin das rote x angezeigt wird, müssen Sie das Bild möglicherweise löschen und dann erneut einfügen.
Magfield in a building
TorsoFootN
10
-5
ter
-5
0
ter
10
-5
ter
-5
0
ter
FootTorso Combination
of individual
0 5
0
0.5
1
Dow
n/in
vers
e in
0 5
0
0.5
1
Dow
n/in
vers
e in
0 5
0
0.5
1
Dow
n/in
vers
e in
0 5
0
0.5
1
Dow
n/in
vers
e in
Referenz-15
-10
Dow
n in
me
-15
-10
Dow
n in
me
-15
-10
Dow
n in
me
-15
-10
Dow
n in
me
ZVUV=0N
orth
Nor
th
of individual advantages
DUAL-IMU IPNS
23.4 25.35 27.3 29.25 31.2 33.15-1
-0.5
time in s
D
23.4 25.35 27.3 29.25 31.2 33.15-1
-0.5
time in s
D
23.4 25.35 27.3 29.25 31.2 33.15-1
-0.5
time in s
D
23.4 25.35 27.3 29.25 31.2 33.15-1
-0.5
time in s
D
S-25
-20
-20
15
-25
-20
-20
15
Foot TorsoFoot Torso
-5 0 5 10 15-30
-5 0 5 10-25
-5 0 5 10 15-30
-5 0 5 10-25 East
East
Christian Ascher 03.08.20097 Institute of Systems Optimization
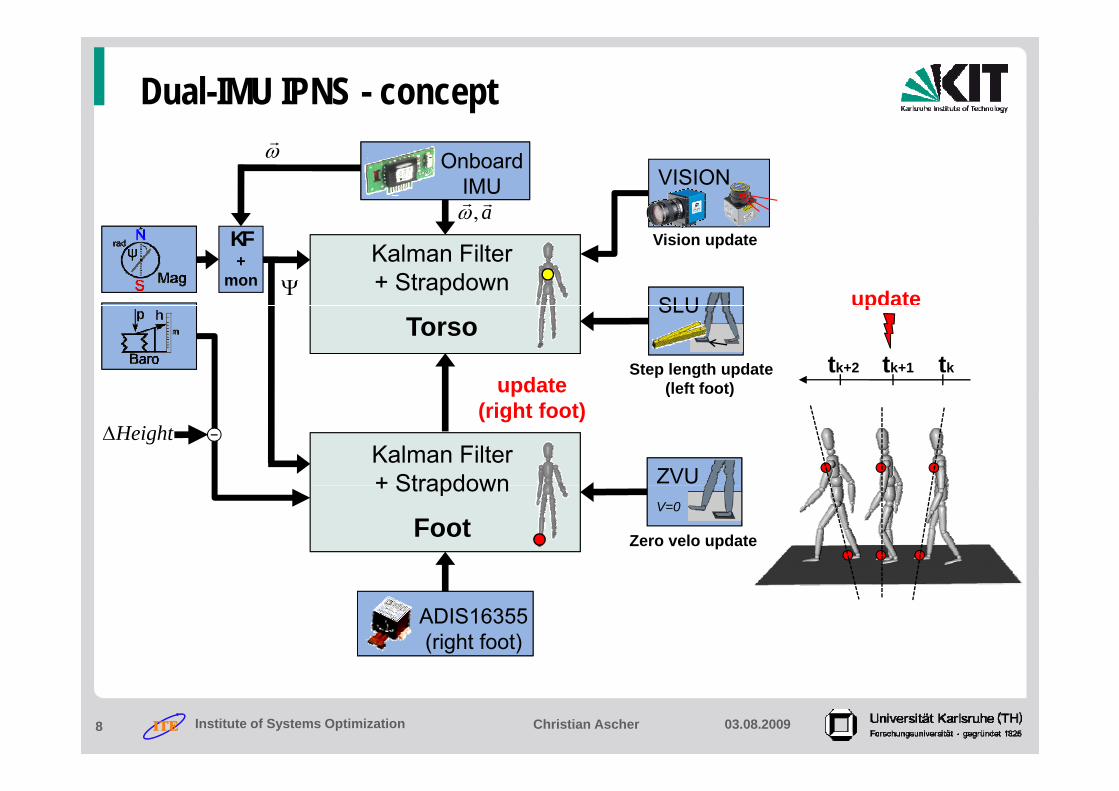
Dual-IMU IPNS - conceptOnboard
IMU
ω
aω
VISION
Kalman Filter + Strapdown
SLUSLUSLUΨ update
KF+
mon
,aωVision update
TorsoSLUSLUSLU
tktk+1tk+2
update
Step length update(left foot)update
ZVUZVUZVUKalman Filter + Strapdown
HeightΔ
( )p(right foot)
V=0V=0V=0+ Strapdown
Foot Zero velo update
ADIS16355 (right foot)
Christian Ascher 03.08.20098 Institute of Systems Optimization

Dual-IMU IPNS – system setup Mag
Gyro
Baro
Acc
NavBoard
Laser
Hokuyo URG-04LX Laser- range: 4.5m- opening angle: 240°
Acc
Torso: NavBoard- self-developed sensorboard- 2 Kalmanfilters running opening angle: 240- Navsolution output
ADIS16355
Foot: ADIS16355- self-developed
Handheld: Openmoko- display and operation
Christian Ascher 03.08.20099 Institute of Systems Optimization
p- Bluetooth connection
p y p- map matching (particle filter)
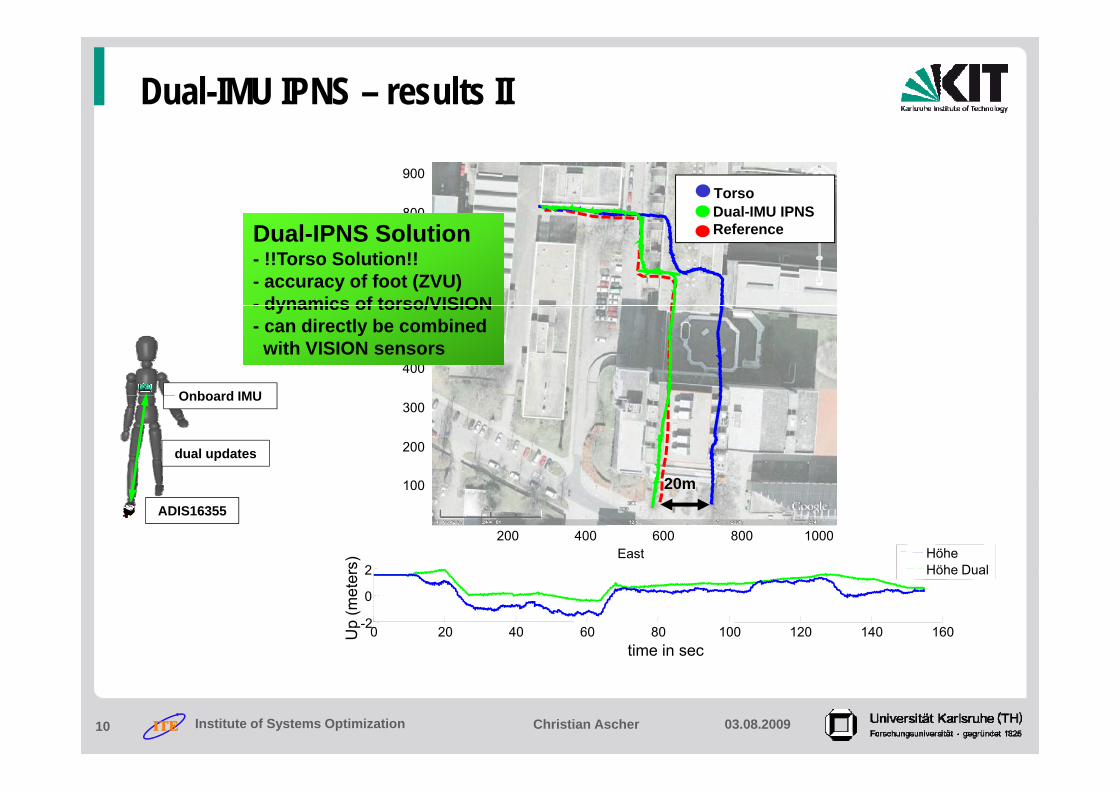
Dual-IMU IPNS – results II
800
900TorsoDual-IMU IPNS
600
700
800 Dual IMU IPNSReferenceDual-IPNS Solution
- !!Torso Solution!!- accuracy of foot (ZVU)- dynamics of torso/VISION
Onboard IMU
400
500
Nor
th
- dynamics of torso/VISION- can directly be combinedwith VISION sensors
Onboard IMU
dual updates
100
200
300
20m
2rs)
Höhe DualHöhe
ADIS16355
200 400 600 800 1000
100
East
20m
0 20 40 60 80 100 120 140 160-2
0
time in sec
Up
(met
e
Christian Ascher 03.08.200910 Institute of Systems Optimization

Dual-IMU IPNS – results III
Dual-IMU IPNSReferenceDual-IPNS Solution
!!T S l ti !!- !!Torso Solution!!- Results are reproductive
NavBoard 4mNavBoard
dual updates
14
ADIS16355
30m
Christian Ascher 03.08.200911 Institute of Systems Optimization
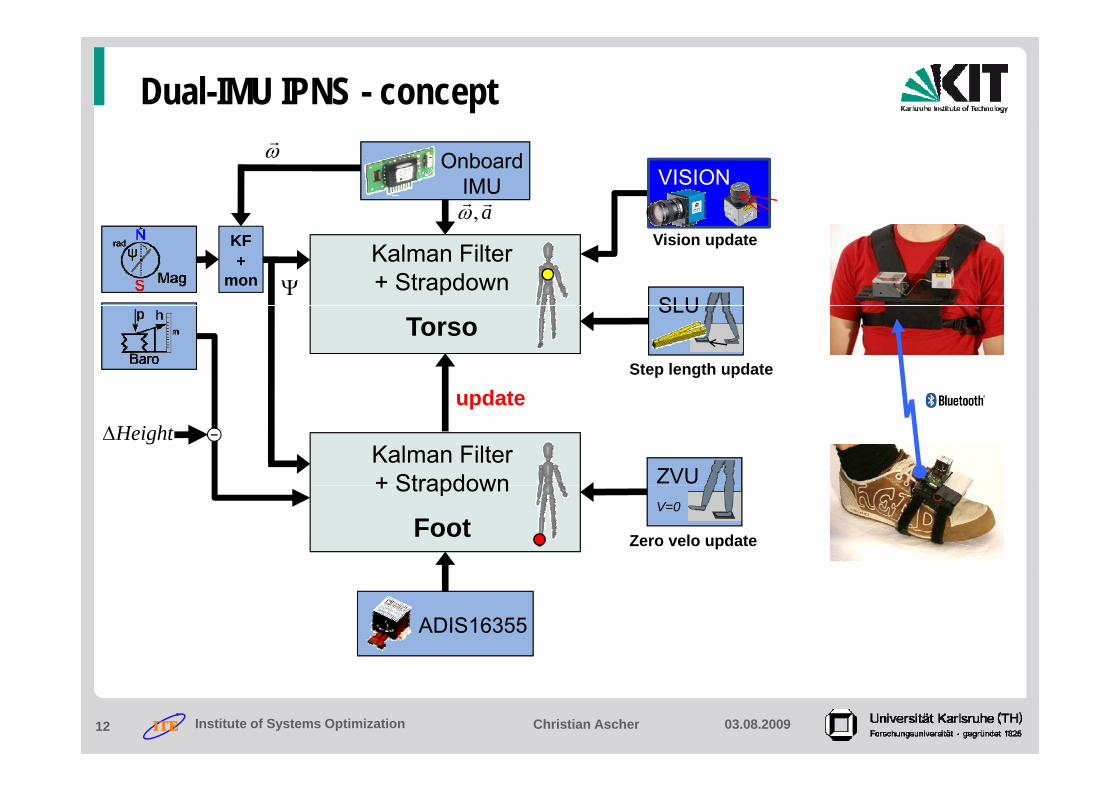
Dual-IMU IPNS - conceptOnboard
IMU
ω
aω
VISIONVISION
Kalman Filter + Strapdown
SLUSLUSLUΨ
KF+
mon
,aωVision update
TorsoSLUSLUSLU
Step length update
update
ZVUZVUZVUKalman Filter + Strapdown
HeightΔ
update
V=0V=0V=0+ Strapdown
Foot Zero velo update
ADIS16355
Christian Ascher 03.08.200912 Institute of Systems Optimization
Agenda
Integrated Pedestrian Navigation System (IPNS)
Dead Reckoning(DR) & Zero Velo Updates(ZVU)
Dual-IMU approach
OrthoSLAM
OrthoSLAM Algorithm from V.Nguyen, ETH Zurichg g y ,
Combining Laser Range Measurements and a Dual-IMU IPNS
ConclusionConclusion
Christian Ascher 03.08.200913 Institute of Systems Optimization

Ortho SLAM
Basis of OrthoSLAMBasis of OrthoSLAM
„Orthogonal SLAM: a Step toward Lightweight Indoor Autonomous
Navigation” 2006 Viet Nguyen et al ETH ZürichNavigation 2006, Viet Nguyen et al., ETH Zürich
Realization
R d ti f l it b li iti b ildi t th l liReduction of complexity by limiting building to orthogonal lines
State vector only with line distances
Using a local mapto reduce search area
Christian Ascher 03.08.200914 Institute of Systems Optimization
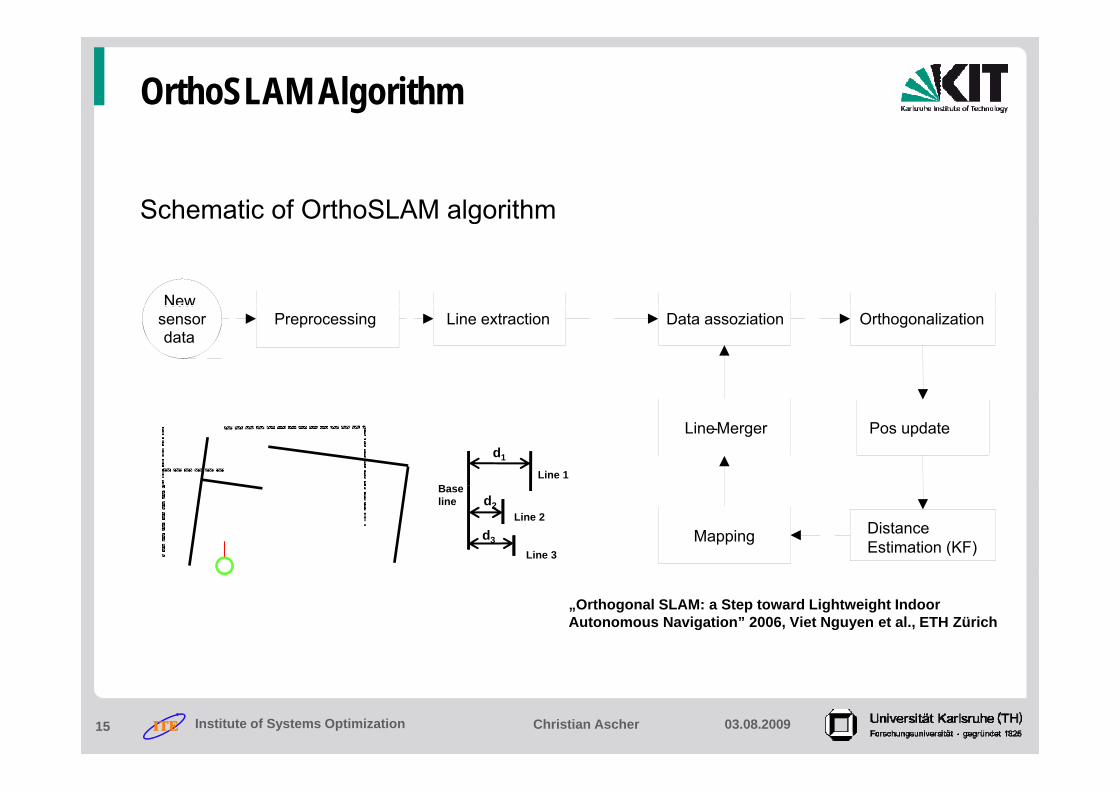
OrthoSLAM Algorithm
Schematic of OrthoSLAM algorithmSchematic of OrthoSLAM algorithm
NewNew sensordata
Preprocessing Line extraction Data assoziation Orthogonalization
Pos updateLine-Merger
B
d1
Line 1
Mapping DistanceEstimation (KF)
Baseline
Line 2
Line 3
d2
d3
„Orthogonal SLAM: a Step toward Lightweight Indoor Autonomous Navigation” 2006, Viet Nguyen et al., ETH Zürich
Christian Ascher 03.08.200915 Institute of Systems Optimization

OrthoSLAM – results
Christian Ascher 03.08.200916 Institute of Systems Optimization
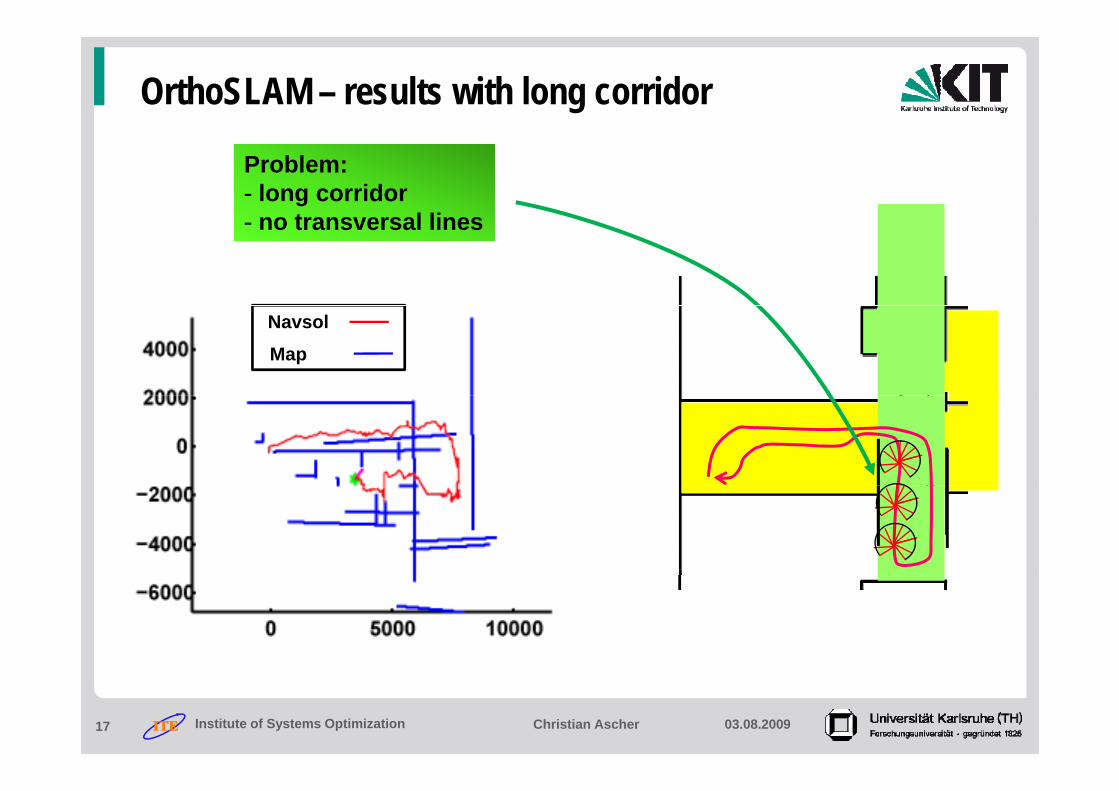
OrthoSLAM – results with long corridor
Problem: - long corridor
t l li- no transversal lines
Navsol
Map
Christian Ascher 03.08.200917 Institute of Systems Optimization
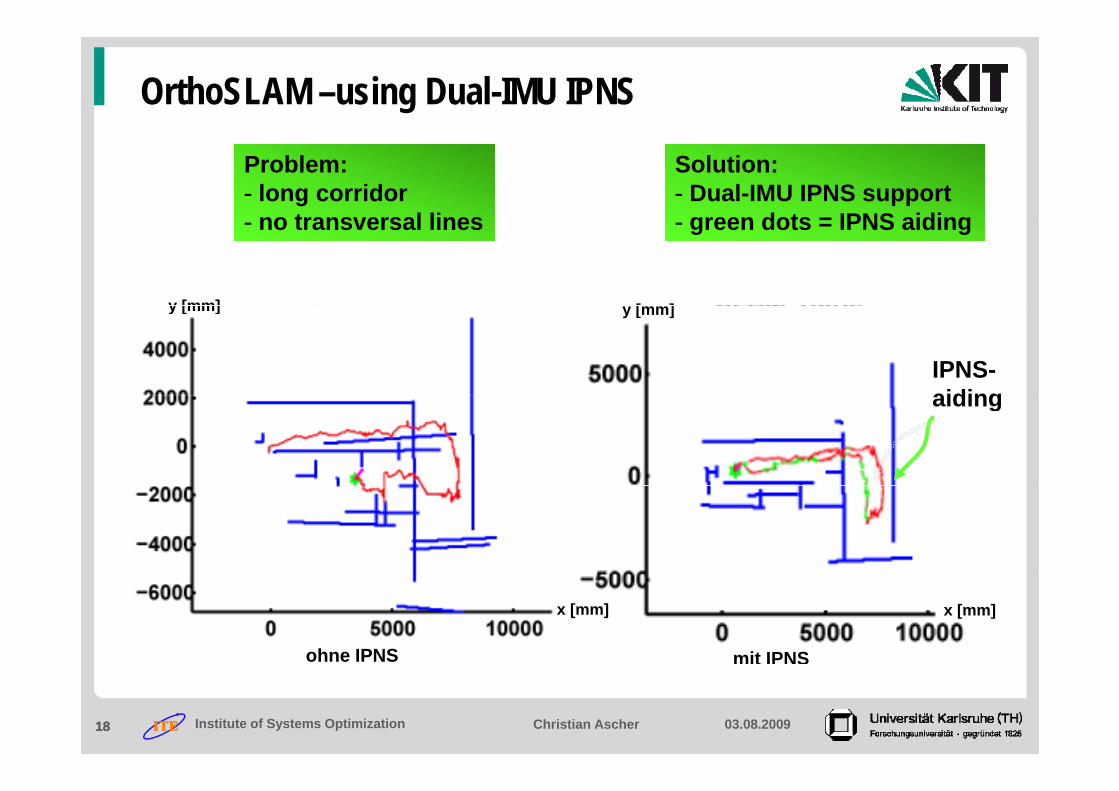
OrthoSLAM –using Dual-IMU IPNS
Solution: - Dual-IMU IPNS support
d t IPNS idi
Problem: - long corridor
t l li
y [mm] [ ]
- green dots = IPNS aiding- no transversal lines
y [mm] y [mm]
IPNS-aidingaiding
mit IPNSohne IPNS
x [mm] x [mm]
Christian Ascher 03.08.200918 Institute of Systems Optimization18
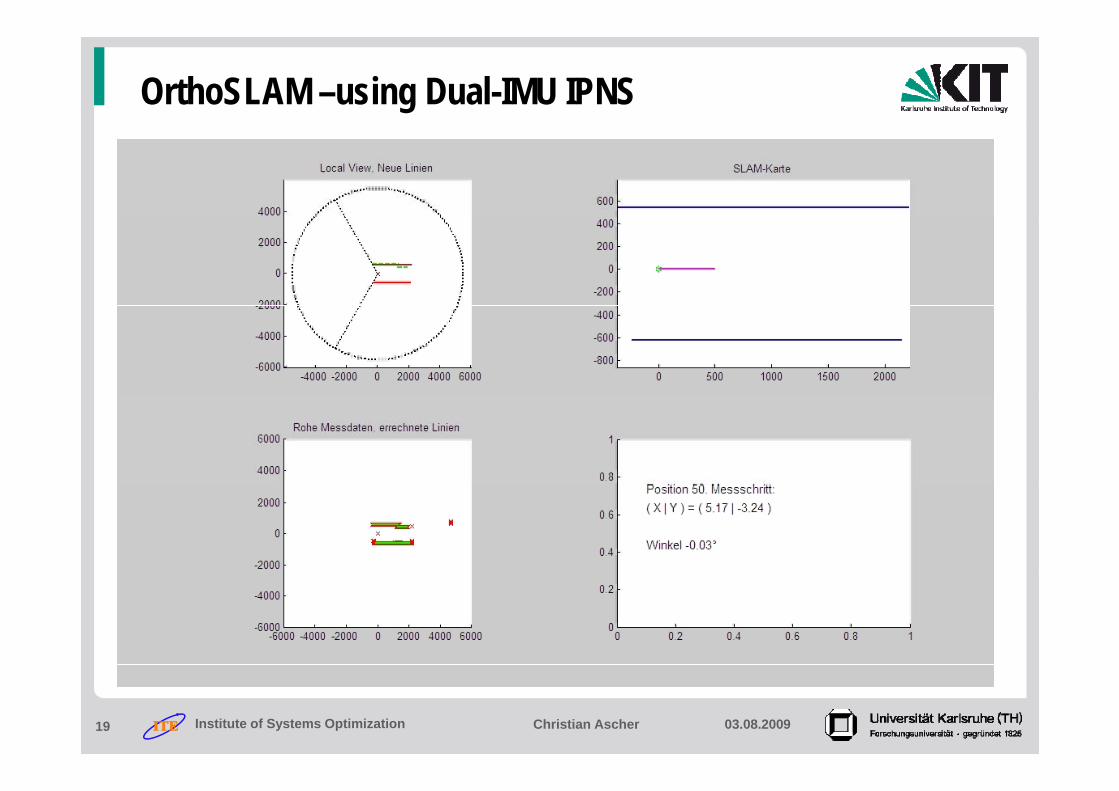
OrthoSLAM –using Dual-IMU IPNS
Christian Ascher 03.08.200919 Institute of Systems Optimization

OrthoSLAM –using Dual-IMU IPNS
Combining LASER and IPNS is necessary in long corridors
Yields to good accuracy (example 2% mapping error)
Combined system is much more robust
Loop closure
Map NavSol[mm][mm]
real17 30 ti t d17.30 m estimated
17.00 m
[mm][mm]
Christian Ascher 03.08.200920 Institute of Systems Optimization

Conclusion
Dual-IMU Integrated Pedestrian Navigation System (IPNS )
f f t (ZVU)accuracy of foot (ZVU)
dynamics of torso/VISION
can directly be combined with VISION sensors
Combining Laser measurements and a Dual-IMU IPNS
OutlookOrthoSLAM online processing on a portable Intel Atom
Combining Camera with Dual-IMU approachg pp
Portable System for operators
Christian Ascher 03.08.200921 Institute of Systems Optimization
The end
Thank you.
Feel free to ask questions!
Institute of Systems OptimizationUniversity of Karlsruhe , Germany
Dipl.-Ing. Christian AscherDipl. Ing. Christian AscherDipl.-Ing. Christoph KeßlerProf. Gert Trommer
Christian Ascher 03.08.200922 Institute of Systems Optimization