Infinity-norm acceleration minimization of robotic redundant manipulators using the LVI-based...
8
Robotics and Computer-Integrated Manufacturing 25 (2009) 358–365 Infinity-norm acceleration minimization of robotic redundant manipulators using the LVI-based primal–dual neural network Yunong Zhang , Jiangping Yin, Binghuang Cai Department of Electronics and Communication Engineering, Sun Yat-Sen University, Guangzhou 510275, China Received 13 February 2007; received in revised form 18 January 2008; accepted 7 February 2008 Abstract Kinematically redundant manipulators admit an infinite number of inverse kinematic solutions and hence the optimization of different performance measures corresponding to various task requirements must be considered. Joint accelerations of these mechanisms are usually computed by optimizing various criteria defined using the two-norm of acceleration vectors in the joint space. However, in formulating the optimization measures for computing the inverse kinematics of redundant arms, this paper investigates the use of the infinity norm of joint acceleration (INAM) (also known as the minimum-effort solution). The infinity norm of a vector is its maximum absolute value component and hence its minimization implies the determination of a minimum-effort solution as opposed to the minimum-energy criterion associated with the two-norm. Moreover, the new scheme reformulates the task as the online solution to a quadratic programming problem and incorporates three levels of joint physical limits, thus keeping the acceleration within a given range and avoiding the torque-instability problem. In addition, since the new scheme adopts the LVI-based primal–dual neural network, it does not entail any matrix inversion or matrix–matrix multiplication, which was embodied in other’s researches with expensive Oðn 3 Þ operations. This new proposed QP-based dynamic system scheme is simulated based on the PUMA560 robot arm. r 2008 Elsevier Ltd. All rights reserved. Keywords: Redundancy resolution; Minimum infinity-norm acceleration; Quadratic programming (QP); LVI-based primal–dual neural network 1. Introduction Redundant manipulators are those having more degrees of freedom than required to perform specified tasks. In addition to the end-effector task, the extra degrees of freedom are useful for manipulators in executing subtasks such as obstacle avoidance [1], joint limits avoidance [2], singularity avoidance [3], and optimization of various performance criteria [4–6]. Redundant manipulator motion planning and control is thus an appealing area in robotics research. The inverse kinematics problem, namely, to find the joint motion for a given end-effector task, is one of the vital and challenging issues in redundant manipulator control because there are an infinite number of joint configurations which accomplish a specific end-effector task. As we know, the end-effector position and orientation in Cartesian space is related to the joint space through a forward-kinematic equation: rðtÞ¼ f ðyðtÞÞ, (1) where rðtÞ2 R m is the position and orientation of the end- effector in the Cartesian space, yðtÞ2 R n is the joint variable for a redundant manipulator (since mon in redundant manipulators), and f ðÞ is a continuous non- linear function with known structure and parameters for a given manipulator. Unfortunately, the inverse kinematics problem is usually difficult to solve due to the nonlinearity of f ðÞ, and thus the redundancy-resolution problem is to be solved at the velocity or acceleration level. That is, differentiating (1) with respect to time t gives the linear relation between the Cartesian velocity _ r and joint velocity _ y: J ðyÞ _ y ¼ _ r, (2) where J ðyÞ¼ qf =qy 2 R mn is the Jacobian matrix. Differentiating (2) with respect to time t yields the relation ARTICLE IN PRESS www.elsevier.com/locate/rcim 0736-5845/$ - see front matter r 2008 Elsevier Ltd. All rights reserved. doi:10.1016/j.rcim.2008.02.002 Corresponding author. Tel.: +86 20 84113597; fax: +86 20 84113673/ 84113597. E-mail address: [email protected] (Y. Zhang).
-
Upload
yunong-zhang -
Category
Documents
-
view
219 -
download
0
Transcript of Infinity-norm acceleration minimization of robotic redundant manipulators using the LVI-based...

ARTICLE IN PRESS
0736-5845/$ - se
doi:10.1016/j.rc
�Correspond84113597.
E-mail addr
Robotics and Computer-Integrated Manufacturing 25 (2009) 358–365
www.elsevier.com/locate/rcim
Infinity-norm acceleration minimization of robotic redundantmanipulators using the LVI-based primal–dual neural network
Yunong Zhang�, Jiangping Yin, Binghuang Cai
Department of Electronics and Communication Engineering, Sun Yat-Sen University, Guangzhou 510275, China
Received 13 February 2007; received in revised form 18 January 2008; accepted 7 February 2008
Abstract
Kinematically redundant manipulators admit an infinite number of inverse kinematic solutions and hence the optimization of different
performance measures corresponding to various task requirements must be considered. Joint accelerations of these mechanisms are
usually computed by optimizing various criteria defined using the two-norm of acceleration vectors in the joint space. However, in
formulating the optimization measures for computing the inverse kinematics of redundant arms, this paper investigates the use of the
infinity norm of joint acceleration (INAM) (also known as the minimum-effort solution). The infinity norm of a vector is its maximum
absolute value component and hence its minimization implies the determination of a minimum-effort solution as opposed to the
minimum-energy criterion associated with the two-norm. Moreover, the new scheme reformulates the task as the online solution to a
quadratic programming problem and incorporates three levels of joint physical limits, thus keeping the acceleration within a given range
and avoiding the torque-instability problem. In addition, since the new scheme adopts the LVI-based primal–dual neural network, it does
not entail any matrix inversion or matrix–matrix multiplication, which was embodied in other’s researches with expensive Oðn3Þ
operations. This new proposed QP-based dynamic system scheme is simulated based on the PUMA560 robot arm.
r 2008 Elsevier Ltd. All rights reserved.
Keywords: Redundancy resolution; Minimum infinity-norm acceleration; Quadratic programming (QP); LVI-based primal–dual neural network
1. Introduction
Redundant manipulators are those having more degreesof freedom than required to perform specified tasks. Inaddition to the end-effector task, the extra degrees offreedom are useful for manipulators in executing subtaskssuch as obstacle avoidance [1], joint limits avoidance [2],singularity avoidance [3], and optimization of variousperformance criteria [4–6]. Redundant manipulator motionplanning and control is thus an appealing area in roboticsresearch. The inverse kinematics problem, namely, to findthe joint motion for a given end-effector task, is one of thevital and challenging issues in redundant manipulatorcontrol because there are an infinite number of jointconfigurations which accomplish a specific end-effectortask. As we know, the end-effector position and orientation
e front matter r 2008 Elsevier Ltd. All rights reserved.
im.2008.02.002
ing author. Tel.: +8620 84113597; fax: +8620 84113673/
ess: [email protected] (Y. Zhang).
in Cartesian space is related to the joint space through aforward-kinematic equation:
rðtÞ ¼ f ðyðtÞÞ, (1)
where rðtÞ 2 Rm is the position and orientation of the end-effector in the Cartesian space, yðtÞ 2 Rn is the jointvariable for a redundant manipulator (since mon inredundant manipulators), and f ð�Þ is a continuous non-linear function with known structure and parameters for agiven manipulator.Unfortunately, the inverse kinematics problem is usually
difficult to solve due to the nonlinearity of f ð�Þ, and thusthe redundancy-resolution problem is to be solved at thevelocity or acceleration level. That is, differentiating (1)with respect to time t gives the linear relation between theCartesian velocity _r and joint velocity _y:
JðyÞ_y ¼ _r, (2)
where JðyÞ ¼ qf =qy 2 Rm�n is the Jacobian matrix.Differentiating (2) with respect to time t yields the relation

ARTICLE IN PRESSY. Zhang et al. / Robotics and Computer-Integrated Manufacturing 25 (2009) 358–365 359
between the joint acceleration €y and Cartesianacceleration €r:
JðyÞ€y ¼ €ra, (3)
where €ra ¼ €r� _JðyÞ_y. In a redundant manipulator, (1)–(3)are underdetermined since mon and hence they may admitan infinite number of solutions.
For the redundancy resolution of (3), researchers havepaid more attention to the two-norm minimization of jointacceleration. That is, to minimize k€yk22 ¼ €y
T €y. One of themain reasons is that the two-norm is more mathematicallytractable than other norms. The two-norm minimizationscheme minimizes the sum of squares of joint accelerationvariables, which may not necessarily minimize the magni-tude of individual joint accelerations. That is, there couldbe unequal distribution of the energy, resulting in arelatively high acceleration for a particular joint. This isevidently undesirable in situations where the individualjoint acceleration (instead of its two-norm value) is ofprimary concern. Thus, the infinity-norm accelerationminimization scheme is investigated in this paper forrobotic redundant manipulators, which could have a bettercontrol of the individual components of joint accelerationvector, even distribution of workload, and motion diversityanalysis.
It is worth mentioning that the computation of theinverse kinematics solution is time-consuming, especially inhigh degree-of-freedom robotic systems because of its time-varying nature and matrix-inverse related calculation.Parallel computational methods such as recurrent neuralnetworks could be effective and efficient alternatives for theinverse-kinematics solution [8]. In recent years, manyrecurrent neural networks have been proposed and appliedto robot kinematic and dynamic control, e.g., [8–15]. Inparticular, Ding and Tso [11] presented a neural networkapproach that uses the Tank–Hopfield (TH) network [13]to find the infinity-norm optimization solution of redun-dant manipulators. The TH network, however, carriesfinite penalty parameters which must be very large or theywould reduce the accuracy of the solution. Ding and Wang[12] proposed a scheme that decomposes the minimuminfinity-norm solution into two parts and uses two neuralnetworks presented in [8,15] to find the solution for eachpart. Although the scheme presented in [12] works well incomputing the infinity-norm solution, this paper showsthat, based on the improved problem formulation inSection 3 which transforms the infinity-norm minimizationproblem into a linear program (LP) (being a special case ofQP problem), the minimum infinity-norm solution ofredundant manipulators can be computed by using a singleneural network presented in [16] and has a less cost ofimplementation.
This paper is organized as follows. Section 2 presents thepreliminaries on the infinity-norm acceleration minimiza-tion subject to all levels of joint physical limits. Section 3reformulates the problem as a general quadratic-program-ming problem. Section 4 describes the dynamic QP solver
in the form of an LVI-based primal–dual recurrent neuralnetwork. The simulation results for an industrial robot areshown and discussed in Section 5. Section 6 concludes thispaper with final remarks.
2. Infinity-norm acceleration minimization
In this section, we will convert the proposed infinity-norm acceleration minimization (INAM) problem into aquadratic/linear program which can be solved by the LVI-based primal–dual neural network [16].For a vector x ¼ ½x1;x2; . . . ;xn�
T 2 Rn, with superscript T
denoting the transpose operator, its infinity-norm kxk1 isdefined as
kxk1 ¼ maxfjx1j; jx2j; . . . ; jxnjg ¼ max1pipn
jITi xj, (4)
where j � j denotes the absolute value of a scalar, and I i 2
Rn is the ith column vector of identity matrix I. Theminimization of a redundant-manipulator acceleration isachieved by solving the following time-varying optimiza-tion problem while considering joint physical limitssimultaneously:
minimize k€yk1 (5)
subject to JðyÞ€y ¼ €ra, (6)
€y�p€yp€y
þ, (7)
_y�p_yp_y
þ, (8)
y�pypyþ, (9)
where Eqs. (7)–(9) are incorporated for the avoidance ofjoint acceleration limits, joint velocity limits, and jointlimits, respectively. The superscripts � and þ in (7)–(9)denote, respectively, the lower and upper bounds of acorresponding joint vector. For example, y� and yþ denotethe lower and upper physical limits of joint vectoryðtÞ 2 Rn.
Remark 1. Computing an inverse-kinematic solution byminimizing the infinity norm will yield a joint accelerationvector, of which the maximum (absolute) joint accelerationwill be minimized among all vectors satisfying (6)–(9).Such a solution can thus be thought of as a minimum-amplitude (or termed, minimum-effort [6]) solution, asopposed to the minimum-energy solution associated withthe two-norm. This is an important issue in practice, since,if the solution generated has an unexpected componentoutside the joint acceleration limits, the actual trajectoryimplemented will be ‘‘clipped’’ at the corresponding joint,leading to a solution which can not satisfy the end-effectorrequirement (3).
3. Quadratic-programming reformulation
In this section, we propose an Oðn3Þ-free and inverse-freeproblem reformulation for the acceleration-level minimum-effort redundancy resolution depicted in (5)–(9). This

ARTICLE IN PRESSY. Zhang et al. / Robotics and Computer-Integrated Manufacturing 25 (2009) 358–365360
Oðn3Þ-free and inverse-free QP reformulation is achieved byresolving redundancy at the joint-acceleration level, i.e., €y.This is because resolving redundancy at the accelerationlevel could simultaneously and directly handle all levels ofjoint physical limits depicted in (7)–(9).
3.1. Handling joint physical limits
Previously, in the aforementioned schemes (including thetwo-norm scheme), it was usually assumed that thereexisted no joint limits or joint velocity limits, not tomention the joint acceleration limits. However, joint limitsare physical constraints of the work space of a robot andthey do exist for all kinds of robot. If a solution exceeds themechanical joint rotation limits, the desired path becomesimpossible to accomplish and the solution is then useless.On the other hand, if we take the physical constraints intoconsideration, advantages are obvious: (1) we can keep allthe joint variables within their mechanical range (e.g.,_y�p_yp_y
þ) so as to avoid so-called weariness phenomen-
on, (2) by considering the acceleration limits, we can avoidthe torque-divergence problem, and (3) we can providefurther insights into humanoid robots and human move-ment researches.
In this subsection, we will incorporate three physicalconstraints into a unified constraint in the form of double-sided joint acceleration constraint. That is, as theredundancy is to be resolved at the acceleration level, thejoint physical limits (8) and (9) have to be converted into anexpression based on joint acceleration €y. Firstly, the limitedjoint velocity range (9) can be formulated in terms of €y byusing variable bounds:
kvð_y�� _yÞp€ypkvð_y
þ� _yÞ,
where design parameter kv40 is usually selected as 20.Secondly, the limited joint range (9) can also be formulatedin terms of €y by using variable bounds:
kpðmy�� yÞp€ypkpðmy
þ� yÞ,
where design parameter kp40 is also selected as 20, anddesign parameter m 2 ð0; 1Þ is defined as the critical-regioncoefficient in light of the inertia movement duringdeceleration. m is usually selected as 0.9 to define a criticalregion ½y�; my�] or ½myþ; yþ� such that there will appear adeceleration when the robot joints enter such a criticalregion. So, joint limits Eqs. (7)–(9) can be finally combinedinto the following bound constraint:
Z�p€ypZþ, (10)
where the ith elements of Z� and Zþ are
Z�i ¼ maxfkpðmy�i � yiÞ; kvð_y
�
i �_yiÞ; €y
�
i g,
Zþi ¼ minfkpðmyþi � yiÞ;kvð_y
þ
i �_yiÞ; €y
þ
i g. (11)
3.2. Handling the infinity-norm
To handle k€yðtÞk1, let us introduce a new scalar variableyX0 to represent the value of k€yðtÞk1, and we have thefollowing lemma.
Lemma. The pure k€yðtÞk1 minimization problem can be
rewritten as
minimize y
subject toI �1v
�I �1v
" # €yðtÞ
yðtÞ
" #p
0
0
" #, (12)
where 1v ¼ ½1; . . . ; 1�T 2 Rn is a one-vector, I 2 Rn�n is the
identity matrix, and 0 2 Rm here is a null vector.
Proof. See Appendix A. &
Now by combining bound constraint (10) and end-effector requirement (6), we have a new problem formula-tion for the infinity-norm acceleration problem.
minimize y
subject toI �1v
�I �1v
" # €yðtÞ
yðtÞ
" #p
0
0
" #,
J €y ¼ €ra,
Z�p€ypZþ. (13)
Using the augment decision vector, x:¼½€yT; y�T 2 Rnþ1, the
following result is naturally obtained.
Theorem 1. The acceleration-level minimum effort redun-
dancy resolution scheme, (5)–(9), can be reformulated as a
quadratic programming problem of the following form:
minimize xTQx=2þ pTx (14)
subject to Cx ¼ d, (15)
Axpb, (16)
x�pxpxþ, (17)
where the coefficients are defined as Q ¼ 0, p ¼
½0; . . . :; 0; 1�T 2 Rnþ1, C ¼ ½J; 0� 2 Rm�ðnþ1Þ, d ¼ €ra 2 Rm,b ¼ 0 2 R2n, and with constant $b0 being sufficiently large
to represent þ1 for numerical simulation purposes,
A ¼I �1v
�I �1v
" #2 R2n�ð2nþ1Þ; x� ¼
Z�
0
" #,
xþ ¼Zþ
$
" #2 Rnþ1.
Proof. Following the above analysis starting from Section3.1 and ending at Section 3.2. &
4. Online QP solver
In the previous section, we have reformulated thephysically constrained joint acceleration minimization

ARTICLE IN PRESS
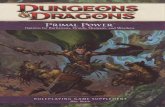
Fig. 1. (a) Piecewise-linear projection operator POð�Þ and (b) block
diagram of the LVI-based primal–dual neural network (19) for solving
QP/LP (14)–(17).
Y. Zhang et al. / Robotics and Computer-Integrated Manufacturing 25 (2009) 358–365 361
problem as a time-varying quadratic program subject tohybrid kinds of constraints, i.e., in (14)–(17). Thisreformulation separates major mathematic problems froman originally very complex robotic context, making theredundancy-resolution task much clearer and easier toimplement. In addition, different from other’s researches,the new reformulation has no matrix computation of Oðn3Þ
operations, especially, no matrix inversion. In this part, weextend the LVI-based primal–dual neural network tosolving general QP/LP (14)–(17) as follows.
Firstly, we convert QP/LP (14)–(17) to an LVI problemformulation via Theorem 2.
Theorem 2 (QP/LP-LVI reformulation). The quadratic
program (14)–(17) can be converted to a set of linear
variational inequalities (LVI). That is, to find a primal–
dual equilibrium vector zn 2 O such that 8z 2 O:¼fzjz�ipzipzþi ; i ¼ 1; 2; . . . ; ð3nþmþ 1Þg � R3nþmþ1,
ðz� z�ÞTðWz� þ qÞX0, (18)
where the primal–dual decision vector z, together with its
lower/upper bounds, is defined as
z ¼
x
u
v
264375; z� ¼
x�
�1v$
0
264
375; zþ ¼
xþ
1v$
1v$
264
375,
and u and v are dual decision vectors corresponding to
equality constraint (15) and inequality constraint (16), res-
pectively. The augmented coefficients are defined as
W ¼
Q �CT AT
C 0 0
�A 0 0
264
375; q ¼
p
�d
b
264
375.
Proof. Can be generalized from Ref. [16]. &
Secondly, it is known from [16] and the referencestherein that Eq. (18) is equivalent to the piecewise-linearequation: POðz� ðWzþ qÞÞ � z ¼ 0, where piecewise-line-ar projection operator POð�Þ:R
3nþmþ1! O is extensivelyused in the dual neural network design and its applications[8,9,11,14–16]. In our context, POðzÞ:¼½POðz1Þ; . . . ;POðz3nþmþ1Þ�
T with the ith element being
POðziÞ ¼
z�i if zioz�i ;
zi if z�i pzipzþi
zþi if zi4zþi :
8><>: ; 8i 2 f1; . . . ; 3nþmþ 1g,
For graphical interpretation of POð�Þ, see Fig. 1(a).Finally, from our neural-network design experience in
[4,11,14,16,17], it follows naturally that the LVI-basedprimal-dual neural network, being the QP/LP solver for(14)–(17), can use the following dynamics equation:
_z ¼ gðI þWTÞfPOðz� ðWzþ qÞÞ � zg, (19)
where g40 is the design parameter used to scale thenetwork convergence. Furthermore, we have the following
global (exponential) convergence of the LVI-based primal-dual neural network when solving QP/LP (14)–(17).
Theorem 3 (Solver convergence). With the existence of at
least one optimal solution x� to QP (14)–(17), starting from
any initial state zð0Þ, the state vector zðtÞ of the LVI-based
primal–dual neural network (19) is convergent to an
equilibrium point z�, of which the first nþ 1 elements
constitute the optimal solution x� to the QP problem
(14)–(17). Moreover, if there exists a constant R40 such
that kz�POðz� ðWzþ qÞÞk22XRkz� z�k22, then the expo-
nential convergence can be achieved with exponential
convergence rate proportional to gR.
Proof. Can be generalized from [18] and the referencestherein by using Lyapunov function candidate kz� z�k22and projection-related inequalities. &
As shown in Fig. 1(b), with simple matrix/vectoraugmentations and operations, the LVI-based primal–dualneural network could be constructed to generate optimalsolution x� (i.e., €y in the acceleration-level minimum-effortredundancy resolution scheme).
Remark 2. The dynamic equation described in (19) andTheorem 3 show that the LVI-based primal–dual neuralnetwork is of simple piecewise linear dynamics, globalconvergence to optimal solutions, and capability of

ARTICLE IN PRESSY. Zhang et al. / Robotics and Computer-Integrated Manufacturing 25 (2009) 358–365362
handling QP and LP simultaneously. In addition, the LVI-based primal–dual neural network does not rely on penaltyparameters, high-order nonlinear terms, or matrix inverses.Consequently, the architecture of the LVI-based primal–dual neural network to be implemented finally on analogcircuits or VLSI could be much simpler than those ofexisting recurrent neural network approaches [10,13]. Interms of computational complexity, there is no onlinematrix inversion or Oðn3Þ operations in our approach. Thenumerical algorithms or discrete-time neural networksderived from model (19) could thus be more efficient thangeneral-purpose numerical methods [10,11,13].
Before ending this section, it is worth mentioning thatwithout the scaling matrix ðI þWTÞ, the simplified LVI-based primal–dual network of (19) could only solve strictlyconvex quadratic programming problems [15]. The proofof Theorem 3 could also be generalized from [18], and is fortime-invariant coefficient matrices W and q. Due to theglobal (exponential) convergence to optimal solutions, theLVI-based primal–dual neural network (19) is able tohandle time-varying coefficient matrices, as to be shown inthe ensuing simulation results.
5. Simulation studies
Based on the Unimation PUMA560 arm [18], a numberof computer simulations have been performed by using the
0 0.1 0.2 0.3 0.4 0.5 0.6−2
−1
0
2
4
time t (s)
−
−
0 0.1 0.2 0.3 0.4 0.5 0.6−3000
−2000
−1000
0
1000
2000
3000
time t (s)
−
−
−
−
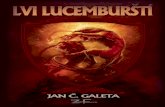
Fig. 2. Conventional INAM scheme without considering joint physical limits, w
joint acceleration in rad/s2 and (d) joint torque in Nm.
aforementioned INAM redundancy-resolution scheme andthe LVI-based primal–dual neural network as the real-timeQP/LP solver. When both the Cartesian position andorientation are considered, the PUMA560 arm is nota redundant robot. However, if we consider onlythe positioning of the end-point of its attached tool, thePUMA560 becomes a redundant manipulator and theassociated Jacobian matrix is JðyÞ 2 R3�6.
5.1. Straight-line path
In the simulation, parameters kp;kv and m are, respec-tively, 20, 20 and 0.9. In this subsection, the desired motionof the end-effector is a straight-line Cartesian path withlength 0:2
ffiffiffi2p
m and task duration T ¼ 5 s, which can beseen from the Fig. 4(a).Comparing Fig. 2 with Fig. 3, it is shown in Fig. 3 via the
proposed INAM scheme that by taking into considerationjoint physical limits, the build-up of very large null-spacejoint velocities/accelerations could be reduced. Therefore, itwill provide a remedy to the torque instability problemwhich is shown in Fig. 2), where, without considering jointphysical limits, the conventional INAM redundancy-resolution scheme fails at time t ¼ 0:55 s.
�
80
40
0
40
80
80
60
40
20
20
40
60
80
hic
Specifically, without considering joint physical limitsEqs. (7)–(9), as seen from Fig. 2(b)–(d), the jointvelocity, joint acceleration and joint torque become
0 0.1 0.2 0.3 0.4 0.5 0.6time t (s)
0 0.1 0.2 0.3 0.4 0.5 0.600
00
00
00
0
00
00
00
00
time t (s)
h fails at t ¼ 0:55 s: (a) joint vector in rad, (b) joint velocity in rad/s, (c)

ARTICLE IN PRESS
0 1 2 3 4 5−1.5
−1
−0.5
0
0.5
1
time t (s)
0 1 2 3 4 5−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
time t (s)
0 1 2 3 4 5−0.4
−0.2
0
0.2
0.4
time t (s)
0 1 2 3 4 5
−5
0
10
20
30
40
time t (s)
Fig. 3. The proposed inverse-free INAM neural scheme applied to PUMA560 with joint physical limits considered: (a) joint vector in rad, (b) joint velocity
in rad/s, (c) joint acceleration in rad=s2, and (d) joint torque in Nm.
0
0.2
0.40.5
−0.20
0.20.4
−0.2
0
0.2
0.4
0.6
0.8
XY
Z
00.10.20.30.4
−0.5
00.5
−0.2
0
0.2
0.4
0.6
0.8
X
Y
Z
Fig. 4. Motion trajectories of PUMA560 robot: (a) with the end-effector tracking a straight line and (b) with the end-effector tracking a circular path.
Y. Zhang et al. / Robotics and Computer-Integrated Manufacturing 25 (2009) 358–365 363
larger and larger as time goes on. This finally results inthe torque-instability problem.
� After incorporating joint physical limits, as shown inFig. 3, all joint physical variables have been kept withintheir mechanical limits by using the proposed QP-basedINAM redundancy-resolution neural scheme.
By the way, as shown in Fig. 5(a), by using the INAMredundancy-resolution scheme and the LVI-based primal–-dual neural network, the maximal Cartesian positioningerror at the tool tip of PUMA560 robot arm is less than0.055mm.
5.2. Circular path
In this subsection, by applying the proposed INAMredundancy-resolution scheme and the LVI-based primal-dual neural network to the PUMA560 robot arm, we showthe situation that the end-effector of the PUMA560 robottracks a circular path. The desired motion of the end-effector is a circle with the radius being 10 cm and therevolute angle about the X-axis being p=6. The taskduration of the desired motion is 10 s and the initial jointvariables yð0Þ ¼ ½0; 0; 0; 0; 0; 0�T. Design parameter g ¼ 105.Fig. 4(b) illustrates the situation of the PUMA560

ARTICLE IN PRESS
0 1 2 3 4 5−1
0
1
2
3
4
5
6 x 10−5
time t (s)
eXeYeZ
0 2 4 6 8 10−5
0
5
10
15 x 10−5
time t (s)
eXeYeZ
Fig. 5. Positioning errors of the PUMA560 manipulator: (a) with the end-effector tracking a straight line and (b) with the end-effector tracking a circular
path.
Y. Zhang et al. / Robotics and Computer-Integrated Manufacturing 25 (2009) 358–365364
manipulator tracking a circle in the three-dimensionalworkspace. As shown in Fig. 5(b), the maximal Cartesianpositioning error at the tool tip of PUMA560 robot arm isless than 0.11mm where eX , eY , and eZ denote, respec-tively, the X -, Y -, and Z-axis components of thepositioning error with respect to the base frame.
6. Conclusions
This paper has established an inverse-free QP formula-tion for acceleration-level minimum-effort redundancyresolution of robot manipulators. The QP formulationhas incorporated joint physical limits and thus naturallykeeps all the joint variables within their mechanical limits.The latest LVI-based primal–dual neural network has beendiscussed and applied as a real-time QP solver. Computersimulations based on the PUMA560 robot have substan-tiated the presented theoretical results. In addition to itsrobotic applications, this research may also provide usefulinsights into human motion control and analysis. Futureresearch may lie in the hardware/circuit implementation ofthe LVI-based primal–dual neural network, and thedevelopment of numerical algorithms or discrete-timeneural models derived from this LVI-based primal–dual–-neural network.
Acknowledgments
Continuing the line of this research, the correspondingauthor, Yunong Zhang, had been with National Universityof Ireland at Maynooth, University of Strahclyde, Na-tional University of Singapore, Chinese University of HongKong, since 1999 (before joining the Sun Yat-SenUniversity in 2006). He was supported by various scholar-ships and research fellowships. This research is funded byNational Science Foundation of China under Grant60643004 and by the Science and Technology Office ofSun Yat-Sen University.
Appendix A
Proof of the Lemma. For €y ¼ ½€y1; €y2; . . . ; €yn�T, its infinity-
norm k€yk1 is defined as
k€yk1 ¼ maxfj€y1j; j€y2j; . . . ; j€ynjg ¼ max1pipn
jITi€yj,
where j€yij denotes the absolute value of element €yi, andI i 2 Rn is the ith column vector of identity matrix I. Bydefining the scalar variable y ¼ k€yk1, the minimization ofk€yk1 is then equivalent to
minimize y
subject to jITi€yjpy; 8i 2 f1; 2; . . . ; ng.
Rearranging the above inequality constraint into acompact matrix form, we thus have
minimize y
subject toI �1v
�I �1v
" # €y
y
" #p0,
where 1v 2 Rn and 0 2 R2n are vectors composed, respec-tively, of ones and zeros. The above compact matrix formis now the same as the one appearing in the lemma, and theproof is thus complete. &
References
[1] Sciavicco L, Siciliano B. Modelling and control of robot manip-
ulators. New York: Springer; 2000.
[2] Allotta B, Colla V, Bioli G. Kinematic control of robot manipulators
with joint constraints. ASME J Dyn Syst Meas Control 1999;121(3):
433–42.
[3] Zhang Y, Wang J. A dual neural network for constrained torque
optimization of kinematically redundant manipulators. IEEE Trans
Syst Man Cyber B 2002;32(6):654–62.
[4] Zhang Y, Wang J, Xia Y. A dual neural network for redundancy
resolution of kinematically redundant manipulators subject to joint
limits and joint velocity limits. IEEE Trans Neural Networks 2003;
14(3):658–67.

ARTICLE IN PRESSY. Zhang et al. / Robotics and Computer-Integrated Manufacturing 25 (2009) 358–365 365
[5] Yoshikawa T. Manipulability of robot mechanisms. Int J Robot Res
1985;4(2):3–9.
[6] Deo AS, Walker ID. Minimum effort inverse kinematics for
redundant manipulators. IEEE Trans Robot Automat 1997;11(5):
767–75.
[8] Lee S, Kil RM. Redundant arm kinematic control with recurrent
loop. Neural Networks 1994;7(4):643–59.
[9] Chen TH, Cheng FT, Sun YY, Hung MH. Torque optimization
schemes for kinematically redundant manipulators. J Robot Syst
1994;11(4):257–69.
[10] Cheng FT, Shen RJ, Chen TH. The improved compact QP method
for resolving manipulator redundancy. IEEE Trans Syst Man
Cybernet B 1995;25(2):1521–30.
[11] Ding H, Tso SK. Minimum infinity-norm kinematic solution for
redundant robots using neural networks. Proc. IEEE Conference
Robotics and Automation 1998;12(1):1719–924.
[12] Ding H, Wang J. Recurrent neural networks for minimum infinity-
norm kinematic control of redundant manipulators. IEEE Trans Syst
Man Cybernet B 1999;29(2):269–76.
[13] Tank DW, Hopfield JJ. Simple neural optimization networks: an
A/D converter, signal decision circuit and a linear programming
circuit. IEEE Trans Circuits Syst 1986;33(5):534–41.
[14] Xia Y. A new neural network for solving linear programming
problems and its applications. IEEE Trans Neural Networks 1996;
7(2):525–9.
[15] Zhang Y, Wang J. A dual neural neural network for convex quadratic
programming subject to linear equality and inequality constraints.
Phys Lett A 2002;298(10):27–8.
[16] Zhang Y. On the LVI-based primal–dual neural network for
solvingonline linear and quadratic programming problems. In:
Proceedings of American control conference, 2005. p. 1351–56.
[17] Corke PI, Armstrong HB. A search for consensus among model
parameters reported for the PUMA560 robot. In: Proceedings of IEEE
international conference on robotics and automation, 1994. p. 1608–13.
[18] Zhang Y, Ge SS, Lee TH. A unified quadratic programming based
dynamical system approach to joint torque optimization of physically
constrained redundant manipulators. IEEE Trans Syst Man Cyber-
net B 2004;34(10):2126–32.