
Increasing of safety and functionality in vehicles by ... · modulisation minimized data-flowvia...
20
Increasing of safety and functionality in vehicles by using intelligent mechatronical systems Lessons at TU Budapest the 1.st of April 2004 Dr.- Ing. G. Spiegelberg
Transcript of Increasing of safety and functionality in vehicles by ... · modulisation minimized data-flowvia...

Increasing of safety and functionality in vehiclesby using intelligent mechatronical systems
Lessons at TU Budapestthe 1.st of April 2004
Dr.- Ing. G. Spiegelberg
Needs of future vehicle development
Examples of projects and cooperations
Creating of new HMI
Application of assistant systems
Overview of the lessons
Integration in vehicle architecture
Modulisation of vehicles12
5 3 412
5 3 4

Accident report
motivation of advanced
development
In Germany alone about 60.000 people / year are injured or lose life in accidentsThe most dangerous accident classes with heavy good vehicles involved are:
- jack knifings, - trailer oscillations- roll overs- lane departures
∼ 40 % preventable with an warning system
60 000 injured/killed people per year
∼ 60 % preventable with an controlling system
Goal : decreasing the numbers of accidents by 50 % until 2010
to make it payable, increase of functionality and scale is necc
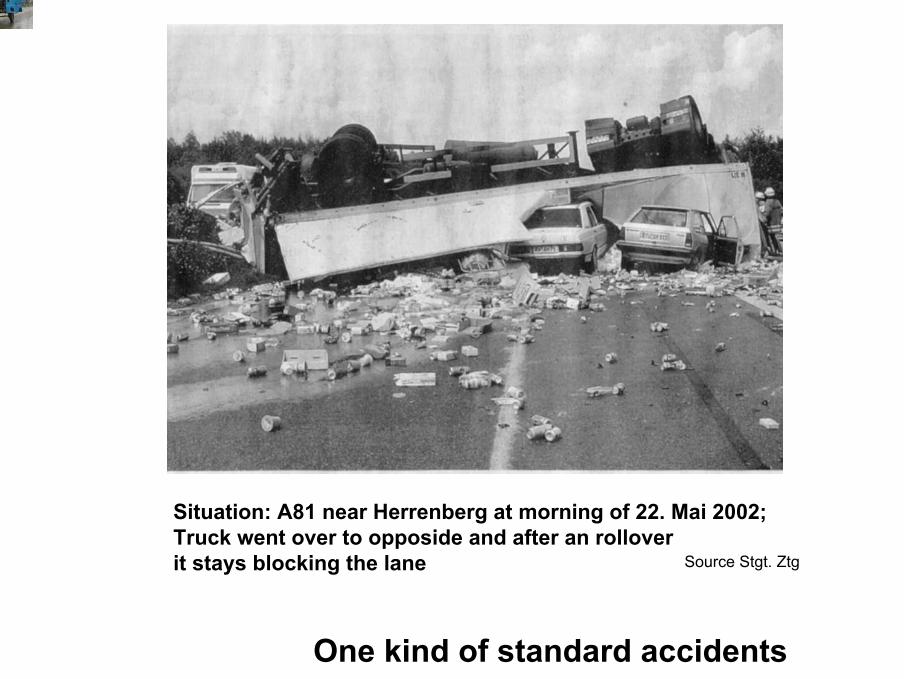
One kind of standard accidents
Situation: A81 near Herrenberg at morning of 22. Mai 2002;Truck went over to opposide and after an rollover it stays blocking the lane Source Stgt. Ztg

Causes for accidents with trucks over 8 tons

informatics
electronics
control technic
mechanics
Mechatronik
Creating of concepts and workout withusing additional technics

informatics
electronics
control technic
mechanics
Mechatronikbionics
Creating of concepts and workout withusing additional technics

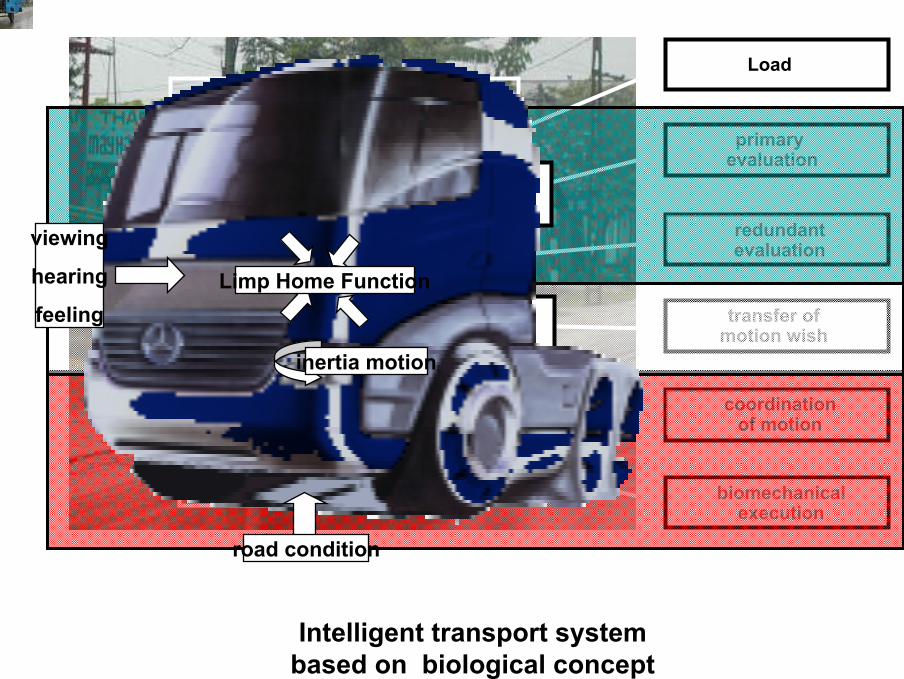
Intelligent transport systembased on biological concept
coordinationof motion
redundantevaluation
biomechanicalexecution
Load
primaryevaluation
transfer ofmotion wish
road condition
viewing
hearing
feeling
inertia motion
Limp Home Function

Intelligent transport systembased on biological concept
coordinationof motion
redundantevaluation
biomechanicalexecution
Load
Execution level
primaryevaluation
Command level
transfer ofmotion wishinterface
Intelligent transport systembased on biological concept
coordinationof motion
redundantevaluation
biomechanicalexecution
Load
Execution level
primaryevaluation
Command level
transfer ofmotion wishinterface
road condition
viewing
hearing
feeling
inertia motion
Limp Home Function
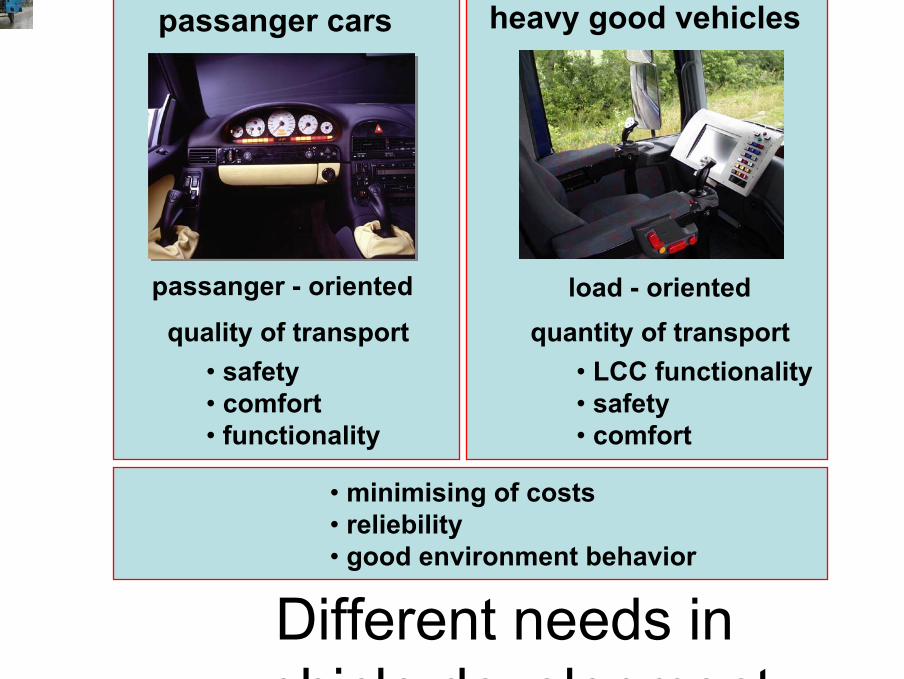
• minimising of costs• reliebility• good environment behavior
passanger cars
• safety• comfort• functionality
quality of transport
passanger - oriented
heavy good vehicles
• LCC functionality• safety• comfort
quantity of transportload - oriented
Different needs in vehicle development

modulemodulemaximized functionality
Concept of modulisation
minimized data-flow via interfaces/ module frame
single responsibility inside frame of module
minimizing of complexitymaximization of integration
12
5 3 4
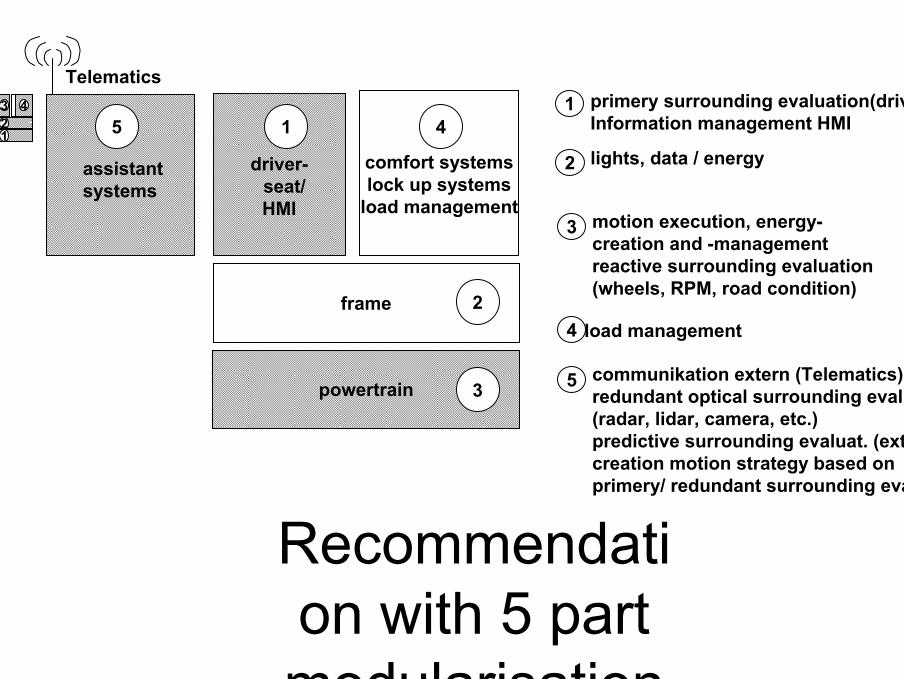
Recommendation with 5 part modularisation
5
assistantsystems
Telematics
driver-seat/HMI
1
comfort systemslock up systems
load management
4
powertrain 3
frame 2
1 primery surrounding evaluation(driver)Information management HMI
2 lights, data / energy
3 motion execution, energy-creation and -managementreactive surrounding evaluation(wheels, RPM, road condition)
4 load management
5 communikation extern (Telematics)redundant optical surrounding evaluat(radar, lidar, camera, etc.)predictive surrounding evaluat. (externcreation motion strategy based onprimery/ redundant surrounding evalua
12
5 3 4
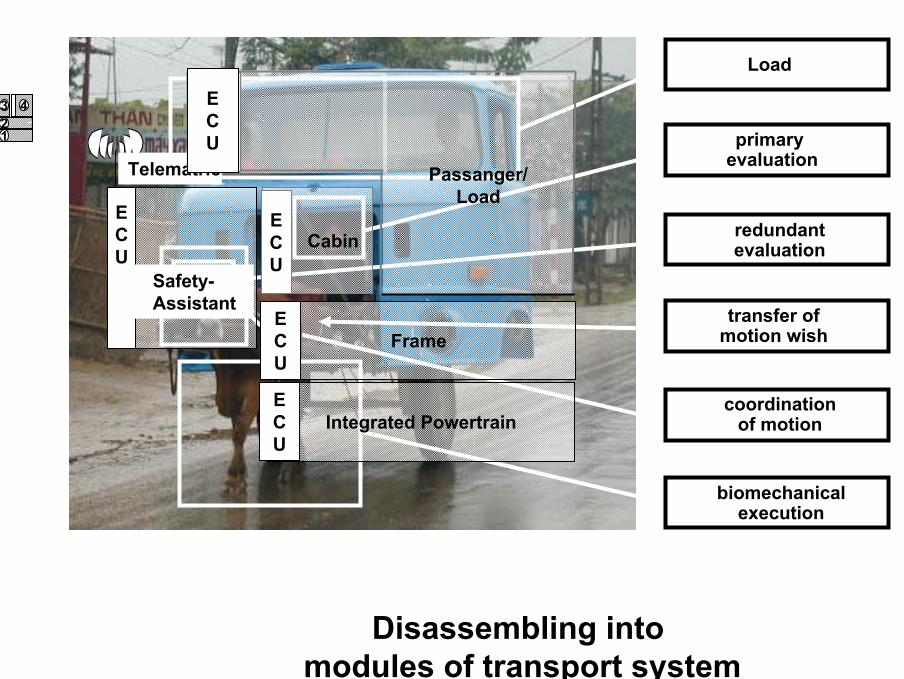
coordinationof motion
redundantevaluation
biomechanicalexecution
Load
primaryevaluation
transfer ofmotion wish
Integrated PowertrainECU
CabinECU
ECU
Safety-Assistant
Telematric
Disassembling into modules of transport system
FrameECU
Passanger/Load
ECU1
25 3 4
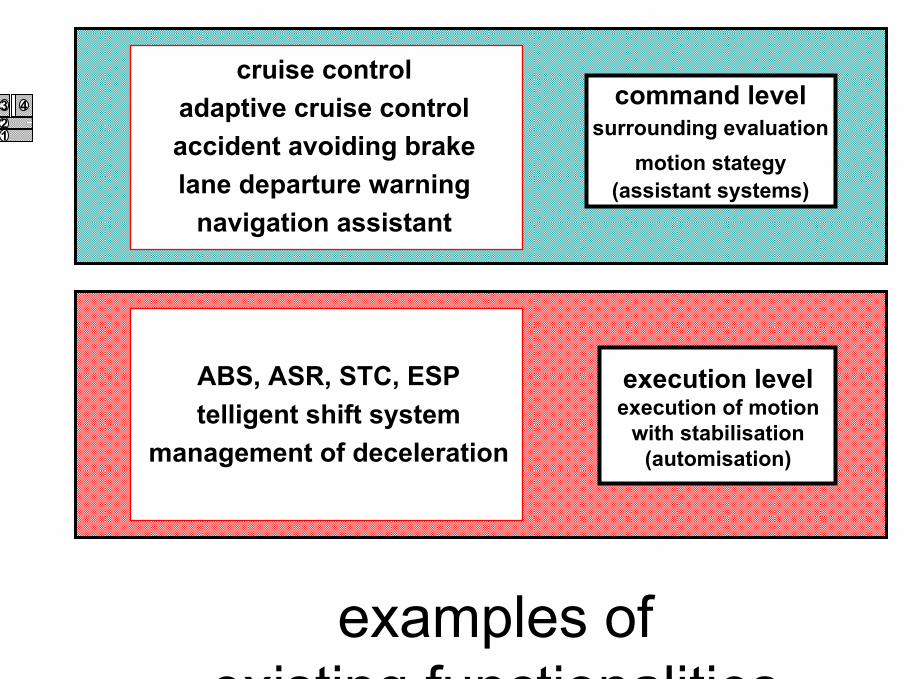
examples of existing functionalities
execution levelexecution of motion
with stabilisation(automisation)
ABS, ASR, STC, ESPtelligent shift system
management of deceleration
command levelsurrounding evaluation
motion stategy(assistant systems)
cruise controladaptive cruise controlaccident avoiding brakelane departure warning
navigation assistant
12
5 3 4

lane departure warninglane departure warninglane departure warningsteer by wiresteersteer by wireby wire
Telligent distronicTelligent Telligent distronicdistronic
activelane followeractiveactivelane followerlane follower
yesterday today yesterday today tomorrowtomorrow
protectorprotectorprotector
timetime
medium run roadmap of assistant systems
12
5 3 4
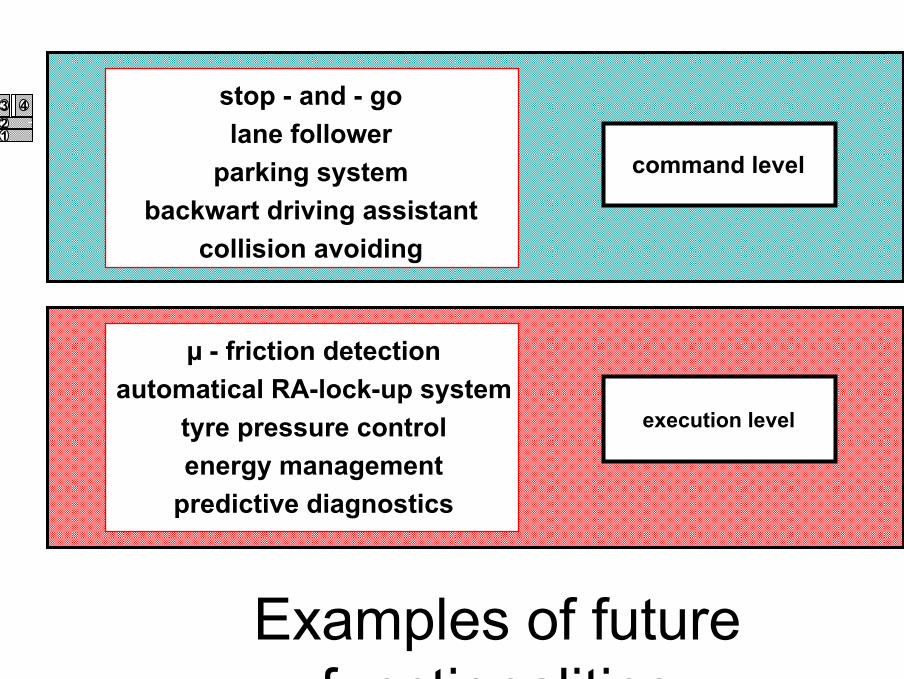
Examples of futurefunctionalities
execution level
µ - friction detectionautomatical RA-lock-up system
tyre pressure controlenergy management
predictive diagnostics
command level
stop - and - golane follower
parking systembackwart driving assistant
collision avoiding
12
5 3 4

Creation of the execution level
coordinationof motion
biomechancal execution
execution level
12
5 3 4

pitch
Fx3
Fy3
Fz3
Mx
3
My3
Mz3
Fx2
Fy2
Fz2
Mx
2
My2
Mz2
Fx4Fy4
Fz4
Mx
4
My4
Mz4
Fx1
Fy1
Fz1
Mx
1
My1
Mz1
vert
ical
dyn
amic
s
lateral dynamics
long. dynamics
yaw
pitch
To control the motion of the car it is neccessary tocontrol all forces between
12
5 3 4

Function of the Brake Based VDC
Oversteer Situation
situation
reaction
12
5 3 4


















