
IGOR SHIGUEO KAWASAKI NAKABAYASHI ANÁLISE...
52
UNIVERSIDADE PRESBITERIANA MACKENZIE ESCOLA DE ENGENHARIA ENGENHARIA ELETRÔNICA IGOR SHIGUEO KAWASAKI NAKABAYASHI ANÁLISE ESPECTRAL DE SINAIS CAÓTICOS São Paulo 2007
Transcript of IGOR SHIGUEO KAWASAKI NAKABAYASHI ANÁLISE...

12
UNIVERSIDADE PRESBITERIANA MACKENZIE
ESCOLA DE ENGENHARIA
ENGENHARIA ELETRÔNICA
IGOR SHIGUEO KAWASAKI NAKABAYASHI
ANÁLISE ESPECTRAL DE SINAIS CAÓTICOS
São Paulo 2007

13
IGOR SHIGUEO KAWASAKI NAKABAYASHI
ANÁLISE ESPECTRAL DE SINAIS CAÓTICOS
Trabalho de Graduação Interdisciplinar apresentado ao Curso de Engenharia Elétrica da Escola de Engenharia da Universidade Presbiteriana Mackenzie, como requisito parcial à obtenção do grau de Bacharel em Engenharia.
ORIENTADOR: PROFESSOR DOUTOR MARCIO EISENCRAFT
São Paulo 2007

14
A meus pais, Vaildo e Sayuri, às minhas irmãs, Tatiana e Luana pelo apoio e incentivo.

15
AGRADECIMENTOS
Ao professor Doutor Marcio Eisencraft pela atenção e orientação e cujos conselhos e
ensinamentos foram essenciais para a finalização desse trabalho.
A todos meus familiares pelo apoio e incentivo.
Aos professores da graduação da Universidade Presbiteriana Mackenzie, que dividiram seu
conhecimento com motivação e boa vontade.

16
RESUMO
Sinais caóticos são sinais cujo comportamento é aperiódico e sensível a condições iniciais.
Além disso, existe a premissa na literatura de que sinais caóticos são sinais de banda larga.
Dessa forma, o objetivo de estudo do trabalho é analisar o espectro de sinais caóticos em
tempo discreto com o intuito de registrar propriedades no diagrama de espectro que possam
contribuir com a aplicação de tais sinais na área de telecomunicação. Além disso, mostra-se
que um sinal caótico não é, necessariamente, um sinal de banda larga.
17
ABSTRACT
Chaotic signals are defined by their characteristics of being aperiodic and sensitive to initial
conditions. Moreover, chaotic signals are considered to be wideband signals. The objective of
this study is to analyze the power spectrum in discrete time of a chaotic signal looking for
properties that may contribute to the use of these signals in real telecommunication systems.
Furthermore, we show that chaotic signals are not necessarily wideband signals.
18
LISTA DE ILUSTRAÇÕES
Gráfico 1 - Órbita da Eq (4) com condição inicial igual a 0,01 ............................................... 27
Gráfico 2 - Órbita da Eq (5) com condição inicial igual a 0,4794 .......................................... 28
Gráfico 3 - Órbita da Eq (6) com condição inicial igual a 0,01 .............................................. 28
Gráfico 4 - Órbita da Eq (7) com condição inicial igual a 0,01 .............................................. 29
Gráfico 5 - Representação das órbitas da Eq (8) com: A) 01.00 =x B) 0101.00 =x C) |f(x)-
f´(x)| .......................................................................................................................................... 30
Gráfico 6 - Diagrama de bifurcação da Eq (9) ........................................................................ 31
Gráfico 7 - Comportamento do número de Lyapunov com variação do parâmetro α ............ 34
Gráfico 8 – Órbitas do mapa tenda inclinada para: A)α = -0.9 B) α = -0.6 C) α = 0. ......... 34
Gráfico 9 – Diagrama de Bifurcação do mapa tenda inclinada. ............................................... 35
Gráfico 10 - Órbitas e espectros de potência do mapa tenda inclinada com : A) 9.0−=α B)
7.0−=α ............................................................................................................................. 43
Gráfico 11 - Órbitas e espectros de potência do mapa tenda inclinada com:A) 5.0−=α B)
3.0−=α ............................................................................................................................. 44
Gráfico 12 - Órbitas e espectros de potência do mapa tenda inclinada com:A) 1.0−=α B)
1.0=α ...................................................................................................................................... 45
Gráfico 13 - Órbitas e espectros de potência do mapa tenda inclinada com: A) 3.0=α B)
5.0=α ..................................................................................................................................... 46
Gráfico 14 - Órbitas e espectros de potência do mapa tenda inclinada com: A) 7.0=α B)
9.0=α ..................................................................................................................................... 47
Gráfico 15 - Espectro de Potência médio com :A) 9.0−=α ; B) 7.0−=α ; C) 5.0−=α ; D)
3.0−=α ; E) 1.0−=α ; F) 1.0=α ; G) 3.0=α ; H) 5.0=α ; I) 7.0=α ; J) 9.0=α ; .......... 48
19
Gráfico 16 – A) Gráfico da banda essencial por α B) Gráfico da banda essencial pelo número
de Lyapunov ............................................................................................................................. 49
Gráfico 17 - Autocorrelação dos sinais caóticos obtidos ......................................................... 50
20
LISTA DE TABELAS
Tabela 1 – Número de Lyapunov e Banda essencial por parâmetro α ................................... 49
21
SUMÁRIO
1 INTRODUÇÃO ................................................................................................................... 22 1.1 ESTRUTURA DO TRABALHO ....................................................................................... 23 2 SISTEMAS DINÂMICOS E CAOS .................................................................................. 25 2.1 DEFINIÇÕES PRELIMINARES ....................................................................................... 25 2.2 EXPOENTES DE LYAPUNOV E CAOS ......................................................................... 31 2.3 MAPA TENDA INCLINADA ........................................................................................... 33 3 ANÁLISE ESPECTRAL .................................................................................................... 36 3.1 SÉRIE DE FOURIER EM TEMPO DISCRETO............................................................... 36 3.2 TRANSFORMADA DE FOURIER EM TEMPO DISCRETO......................................... 37 3.3 DENSIDADE ESPECTRAL DE ENERGIA ..................................................................... 38 3.4 DENSIDADE ESPECTRAL DE POTÊNCIA PARA SINAIS ALEATÓRIOS ............... 39 4 ANALISE ESPECTRAL DE SINAIS CAÓTICOS ......................................................... 42 4.1 DESCRIÇÃO ...................................................................................................................... 42 4.2 RESULTADOS .................................................................................................................. 43 5 CONCLUSÕES .................................................................................................................... 51 REFERENCIAS...................................................................................................................... 53 APÊNDICE – CÓDIGO USADO NA SIMULAÇÃO DE SINAIS CAÓTICOS .............. 54

22
1 INTRODUÇÃO
Problemas envolvendo caos, apesar de serem um tema relativamente novo na
Matemática, já se faziam presentes há dois séculos. Por volta de 1889, ao estudar a dinâmica
de nosso sistema solar, Henry Poincaré já se deparou com um problema envolvendo caos. Em
seu estudo, Poincaré procurou explicar a dinâmica de corpos celestiais utilizando um sistema
simplificado envolvendo três corpos, todos se movendo em um mesmo plano. Nesse modelo,
percebeu que dependendo da condição inicial adotada um corpo celeste poderia ganhar
momento suficiente para ser lançado do sistema e nunca mais retornar; ou dois corpos
acabavam por colidir e nunca mais se separar; ou até mesmo se envolverem em órbitas cujo
movimento era aparentemente imprevisível e aleatório. Dessas possibilidades, a última
chamou a atenção de Poincaré que passou a estudar esse comportamento tão peculiar em seu
sistema. Comportamento esse que, hoje, é denominado caos (ALLIGOOD et al, 1996).
No entanto, ao se falar de caos, não se fazem muitas referencias aos estudos de
Henry Poincaré, mas sim aos estudos de Edward Lorenz. Em 1960, o meteorologista do
Instituto de Tecnologia de Massachusetts trabalhava no desenvolvimento de um modelo
matemático que pudesse prever, com uma semana de antecedência, as condições climáticas de
um determinado local. O modelo levava em consideração uma série de variáveis, entre elas
pressão atmosférica, temperatura e velocidade do vento. Para testar a aderência de seu
modelo, utilizou o computador Royal Macbee do MIT definindo como condição inicial
532493,00 =v para a componente tangencial da velocidade do vento, obtendo então um
cenário para a situação climática na região uma semana depois com 128579,01 =v . Para
validar seu resultado, refez sua simulação, mas dessa vez com uma condição inicial
532490,00 =v ,acreditando que a aproximação infinitesimal não fosse significativa. No
23
entanto, a simulação mostrou um cenário climático completamente diferente do anterior, com
1701935,01 =v . Como se o simples vôo de uma borboleta pudesse interferir drasticamente no
resultado climático da região. Nascera então o famoso efeito borboleta, nome que caracteriza
a sensibilidade de sistemas caóticos a condições iniciais (RICIERI, 1990).
Atualmente, o termo caos é usado quando o comportamento de um sinal é
aperiódico e sensível às condições iniciais (ALLIGOOD et al, 1996). De forma simplificada,
isso significa que o valor da função assume uma seqüência de valores bastante distinta dadas
duas condições inicias infinitesimalmente diferentes. Alem disso seu comportamento após um
grande número de iterações não converge para nenhum ponto fixo ou seqüência periódica.
Sinais caóticos podem vir a ter aplicações interessantes na área de
Telecomunicações. Uma dessas aplicações esta na possibilidade de se utilizar esse tipo de
sinal em técnicas de espalhamento espectral, dado que sinais caóticos normalmente ocupam
uma grande faixa de banda (KENNEDY et al, 1998).
O objetivo deste trabalho é obter sinais caóticos por meio de simulações e
efetuar uma análise espectral de tais sinais à procura de propriedades que contribuam para a
utilização deles na área de Telecomunicações. É igualmente investigado algumas de suas
características como, por exemplo, a banda necessária para transmitir tal sinal.
1.1 ESTRUTURA DO TRABALHO
O trabalho está estruturado em cinco capítulos.
No Capítulo 2 é abordado o tema caos como parte da revisão de literatura
expondo alguns conceitos importantes para facilidade de exposição dos resultados dos
capítulos seguintes.
24
O Capítulo 3 contém a definição da transformada de Fourier e uma listagem
das mais importantes propriedades de tal transformada. É tratado com mais profundidade o
caso da transformada de Fourier em tempo discreto e uma descrição de suas características.
São definidos os conceitos de densidade espectral de potência e de freqüência de amostragem.
O Capítulo 4 apresenta as simulações de sinais caóticos, seguidos de sua
transformada de Fourier e análise espectral. São usados recursos gráficos e algébricos para
procurar relações e propriedades no espectro de tais sinais, bem como propriedades do atrator
caótico através do expoente de Lyapunov.
O Capítulo 5 trata das conclusões do trabalho.

25
2 SISTEMAS DINÂMICOS E CAOS
2.1 DEFINIÇÕES PRELIMINARES
Um sistema dinâmico de tempo discreto é constituído de um conjunto de
possíveis estados associados a uma regra que determina como o estado presente pode ser
obtido a partir de estados passados (ALLIGOOD et al, 1996). Um sistema dinâmico é
considerado determinístico quando um estado presente pode ser unicamente determinado por
meio de suas observações passadas. Neste trabalho são tratados apenas os casos de sistemas
dinâmicos determinísticos.
Para fácil referência, é definido a seguir o conceito de mapa (ALLIGOOD et
al, 1996).
Definição 2.1: Uma função ( ).f cujo domínio é igual à imagem é chamada de mapa.
No caso unidimensional, dado um estado nx , n∈N , o estado seguinte 1nx +
pode ser obtido pela iteração:
( )1n nx f x+ = , (1)
Como notação, é utilizada (.)nf para indicar a n -ésima iteração da função ( ).f . Assim:
0( )nnx f x= (2)
Dado um sistema dinâmico determinístico, é possível definir o conceito de
ponto fixo (ALLIGOOD et al, 1996).
26
Definição 2.2: Um ponto fixo é um ponto p tal que ( )f p p= .
Pontos fixos podem ser caracterizados como estáveis e instáveis (MONTEIRO,
2002). Pontos fixos estáveis atraem pontos próximos de si à medida que o número de
iterações aumenta. Pontos fixos instáveis tendem a afastar pontos de si à medida que o
número de interações aumenta. Em termos mais precisos (ALLIGOOD et al, 1996):
Definição 2.3: Um ponto fixo p é denominado estável quando pontos suficientemente
próximos de p são atraídos para p. Ou seja, se 0e∃ > que para todo x numa vizinhança
)( pNe definida como sendo o conjunto de pontos y em que }|:|{ epyy <−ℜ∈ ,tal que:
lim ( )n
nf x p
→∞= , (3)
então o ponto p é estável.
Definição 2.4: Um ponto fixo p é denominado instável quando pontos suficientemente
próximos de p são repelidos de p. Isso significa que, se 0e∃ > tal que para todo x numa
vizinhança de npNe ∃),( para qual )()( pNxf en ∉ .
Pode-se exemplificar dois casos notáveis para pontos estáveis. O primeiro caso
é aquele em que o limite da função f tende a um único ponto. Como exemplo tem-se a
função:
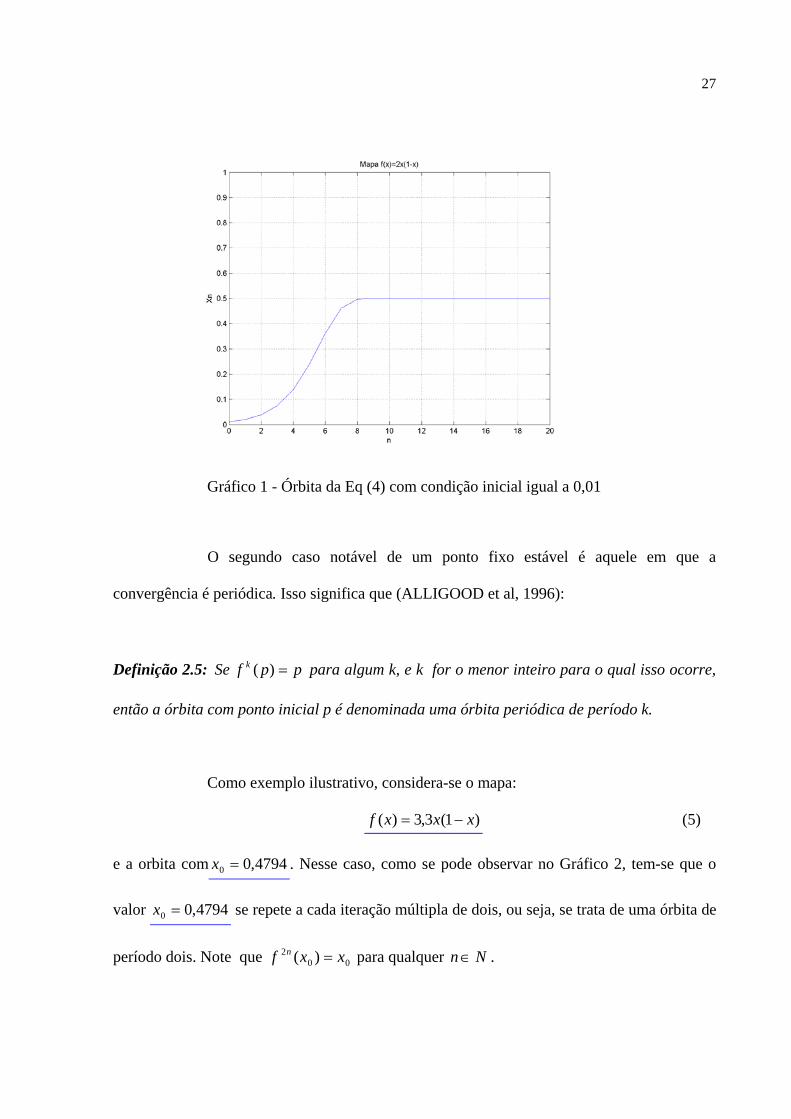
)1(2)( xxxf −= (4)
com condição inicial 01,00 =x . Observa-se no Gráfico 1 que essa função converge para o
ponto fixo 0,5 a partir da oitava iteração.
27
Gráfico 1 - Órbita da Eq (4) com condição inicial igual a 0,01
O segundo caso notável de um ponto fixo estável é aquele em que a
convergência é periódica. Isso significa que (ALLIGOOD et al, 1996):
Definição 2.5: Se ( )kf p p= para algum k, e k for o menor inteiro para o qual isso ocorre,
então a órbita com ponto inicial p é denominada uma órbita periódica de período k.
Como exemplo ilustrativo, considera-se o mapa:
)1(3,3)( xxxf −= (5)
e a orbita com 4794,00 =x . Nesse caso, como se pode observar no Gráfico 2, tem-se que o
valor 4794,00 =x se repete a cada iteração múltipla de dois, ou seja, se trata de uma órbita de
período dois. Note que 002 )( xxf n = para qualquer Nn∈ .
28
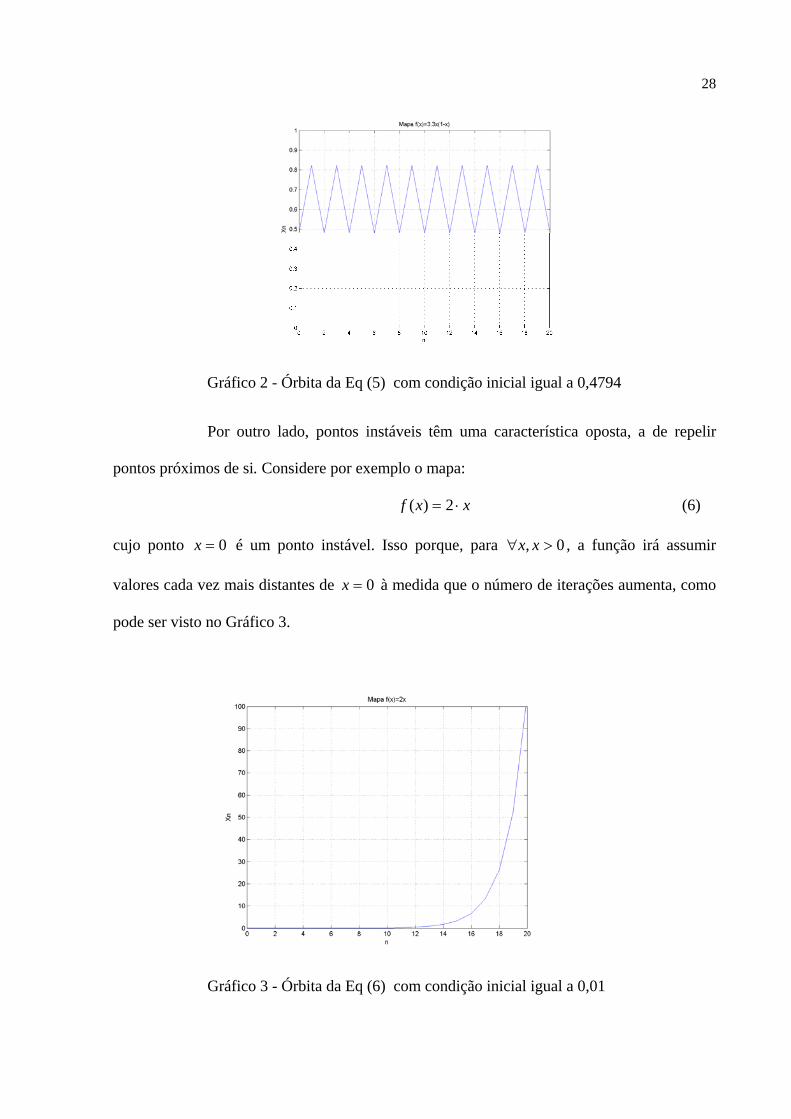
Gráfico 2 - Órbita da Eq (5) com condição inicial igual a 0,4794
Por outro lado, pontos instáveis têm uma característica oposta, a de repelir
pontos próximos de si. Considere por exemplo o mapa:
( ) 2f x x= ⋅ (6)
cujo ponto 0x = é um ponto instável. Isso porque, para , 0x x∀ > , a função irá assumir
valores cada vez mais distantes de 0x = à medida que o número de iterações aumenta, como
pode ser visto no Gráfico 3.
Gráfico 3 - Órbita da Eq (6) com condição inicial igual a 0,01

29
Em contra partida aos dois casos de pontos fixos observados, pode-se citar o
caso em que não se identifica com facilidade nenhum dos dois tipos de pontos citados. A
função a seguir e uma de suas órbitas representada no Gráfico 4 exemplificam esse fato.
)1(9.3)( xxxf −= (7)
Gráfico 4 - Órbita da Eq (7) com condição inicial igual a 0,01
Tal órbita, mostrada no Gráfico 4, é um exemplo de uma órbita aperiódica
dentro o intervalo de 60 iterações, como se pode verificar visualmente.
Como segundo exemplo, mostra-se uma função cujas órbitas assumem um
comportamento aperiódico e sensível a condição inicial:
)1(82,3)( xxxf −= (8)
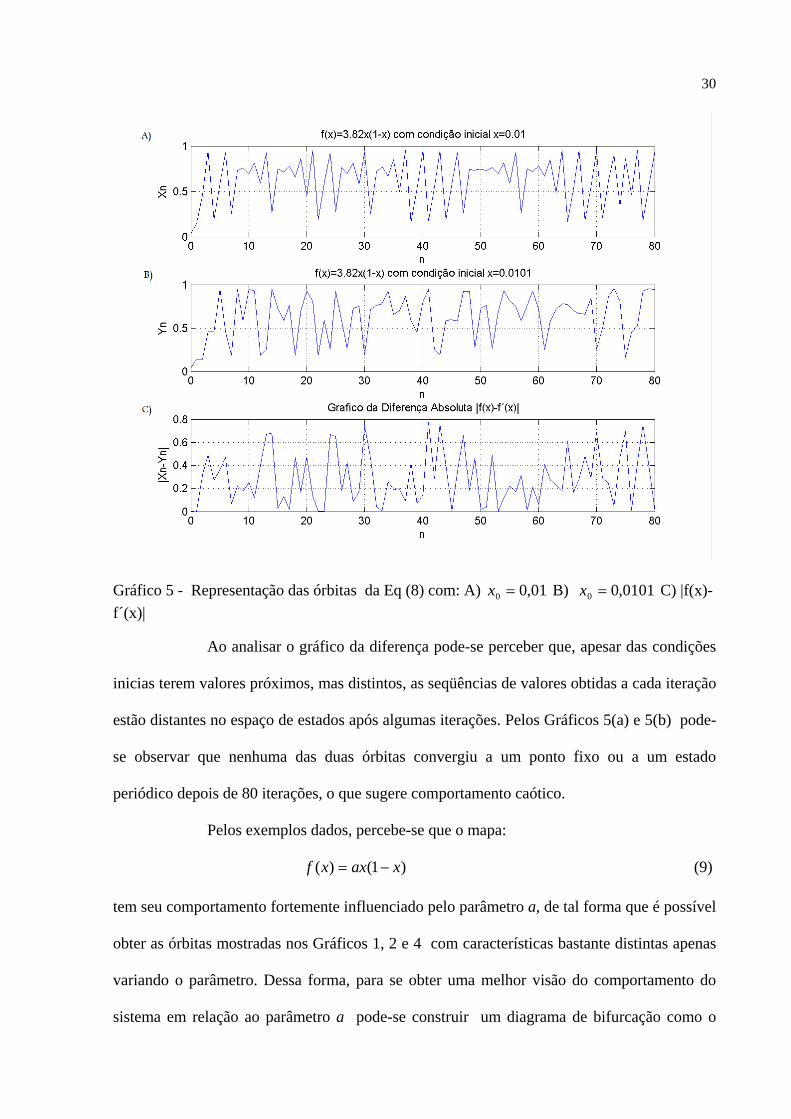
Iterando a Eq 8 a partir de duas condições iniciais diferentes: 0 0,01x = e 0 0,0101x =
obtêm-se os sinais mostrados nos Gráficos 5(a) e 5(b) respectivamente. Para efeito de
comparação, o gráfico da diferença absoluta entre as seqüências de valores obtidas por cada
condição inicial é mostrado no Gráfico 5(c).
30
Gráfico 5 - Representação das órbitas da Eq (8) com: A) 01,00 =x B) 0101,00 =x C) |f(x)-f´(x)| Ao analisar o gráfico da diferença pode-se perceber que, apesar das condições
inicias terem valores próximos, mas distintos, as seqüências de valores obtidas a cada iteração
estão distantes no espaço de estados após algumas iterações. Pelos Gráficos 5(a) e 5(b) pode-
se observar que nenhuma das duas órbitas convergiu a um ponto fixo ou a um estado
periódico depois de 80 iterações, o que sugere comportamento caótico.
Pelos exemplos dados, percebe-se que o mapa:
)1()( xaxxf −= (9)
tem seu comportamento fortemente influenciado pelo parâmetro a, de tal forma que é possível
obter as órbitas mostradas nos Gráficos 1, 2 e 4 com características bastante distintas apenas
variando o parâmetro. Dessa forma, para se obter uma melhor visão do comportamento do
sistema em relação ao parâmetro a pode-se construir um diagrama de bifurcação como o
31
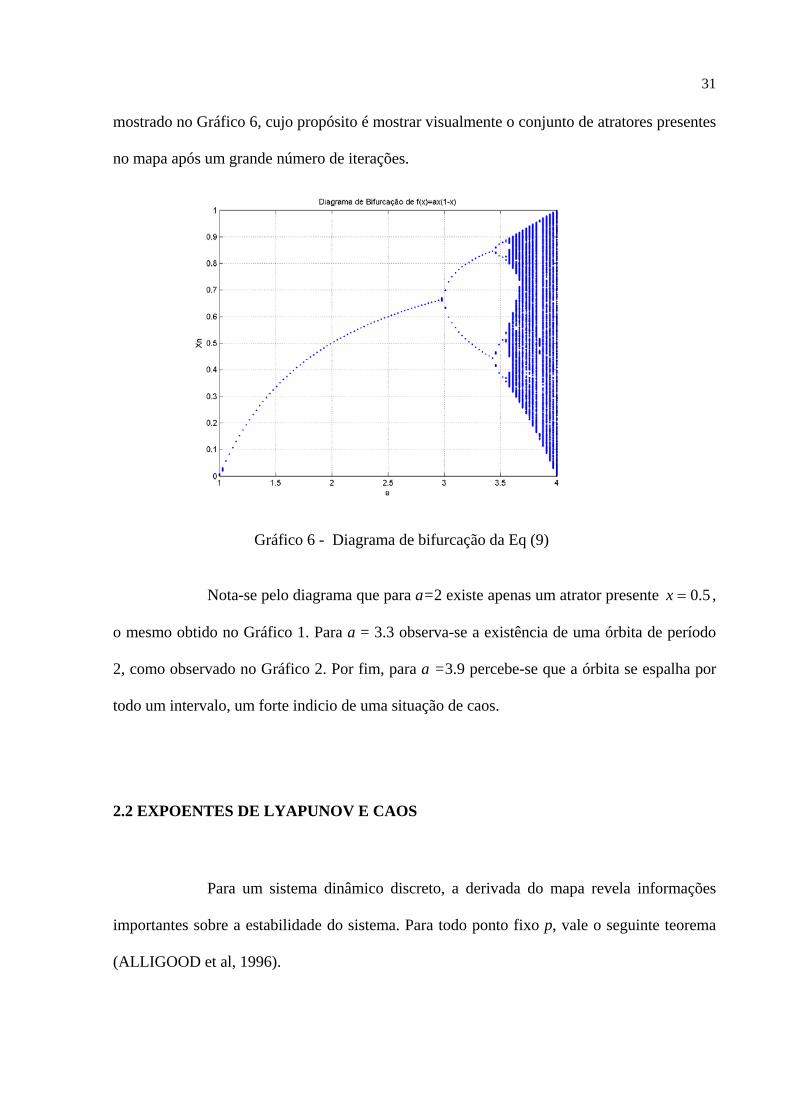
mostrado no Gráfico 6, cujo propósito é mostrar visualmente o conjunto de atratores presentes
no mapa após um grande número de iterações.
Gráfico 6 - Diagrama de bifurcação da Eq (9)
Nota-se pelo diagrama que para a=2 existe apenas um atrator presente 5.0=x ,
o mesmo obtido no Gráfico 1. Para a = 3.3 observa-se a existência de uma órbita de período
2, como observado no Gráfico 2. Por fim, para a =3.9 percebe-se que a órbita se espalha por
todo um intervalo, um forte indicio de uma situação de caos.
2.2 EXPOENTES DE LYAPUNOV E CAOS
Para um sistema dinâmico discreto, a derivada do mapa revela informações
importantes sobre a estabilidade do sistema. Para todo ponto fixo p, vale o seguinte teorema
(ALLIGOOD et al, 1996).
32
Teorema 2.6: seja f um mapa contínuo em ℜ e seja p um ponto fixo desse mapa.Tem-se que:
Se 1)´( <pf , então p é um ponto estável. (9)
Se 1)´( >pf , então p é um ponto instável (10)
em que )´(pf é a derivada de )(xf em p.
Para o caso em que p é instável, um ponto 1x pertencente a uma vizinhança de
p será distanciado do ponto fixo a um fator multiplicativo aproximado de )´(pf unidades
para cada iteração de f.
Tais informações, apesar de relevantes, não auxiliam de maneira pragmática o
estudo de um sistema dinâmico. Dessa forma, um novo fator foi criado para melhor
caracterizar um sistema dinâmico chamado de número de Lyapunov (ALLIGOOD et al,
1996), definido a seguir.
Definição 2.7: seja f um mapa contínuo nos pontos da órbita com condição inicial 0x ,o
número de Lyapunov )( 0xL da órbita ,...},,{ 210 xxx é dado por:
nnn
xfxfxL /100 ))´(....)´((lim)(
∞→= (11)
Se o limite existir o expoente de Lyapunov é definido da seguinte forma:
)(ln)( 00 xLxh = (12)
Se ix∃ para o qual 0)´( =ixf , então o número passa a não ser definido.
Nota-se que o número de Lyapunov é um primeiro passo em direção a uma
definição mais precisa de uma situação caótica. Para tanto, é necessário antes definir o
conceito de assintoticamente periódica (ALLIGOOD et al, 1996):

33
Definição 2.8: seja f um mapa contínuo. Uma órbita ,...},...,,{ 21 nxxx é chamada de
assintoticamente periódica se existe uma órbita periódica ,...},...,,{ 21 nyyy tal que:
0lim =−∞→ nnn
yx (13)
Uma órbita é considerada caótica se:
Definição 2.9: seja um mapa f cujo domínio está contido em ℜ . Uma órbita desse mapa é
considerada caótica se:
1) A órbita não é assintoticamente periódica.
2) O expoente de Lyapunov é maior que zero.
2.3 MAPA TENDA INCLINADA
O mapa tenda inclinada é obtido a partir da função (EISENCRAFT, 2006):
Tal função é tratada com especial atenção pois é utilizada na simulação de
sinais caóticos no capítulo 4. O Gráfico 7 estabelece a relação entre o número de Lyapunov e
o parâmetro α da função tenda inclinada. Tal gráfico foi obtido simulando um mapa com
1500 pontos para cada parâmetro α entre -1 e 1 (passo de 0.01) e calculando, para cada
mapa, o número de Lyapunov.
34
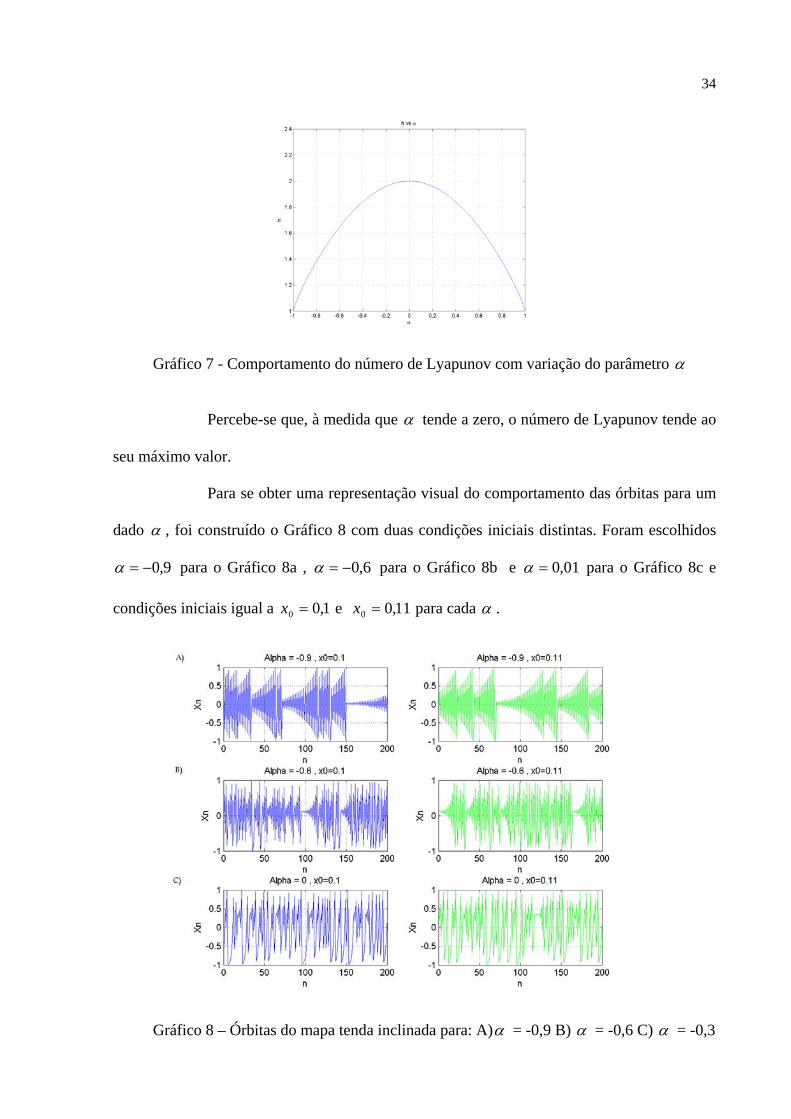
Gráfico 7 - Comportamento do número de Lyapunov com variação do parâmetro α
Percebe-se que, à medida que α tende a zero, o número de Lyapunov tende ao
seu máximo valor.
Para se obter uma representação visual do comportamento das órbitas para um
dado α , foi construído o Gráfico 8 com duas condições iniciais distintas. Foram escolhidos
9,0−=α para o Gráfico 8a , 6,0−=α para o Gráfico 8b e 01,0=α para o Gráfico 8c e
condições iniciais igual a 1,00 =x e 11,00 =x para cada α .
Gráfico 8 – Órbitas do mapa tenda inclinada para: A)α = -0,9 B) α = -0,6 C) α = -0,3
35
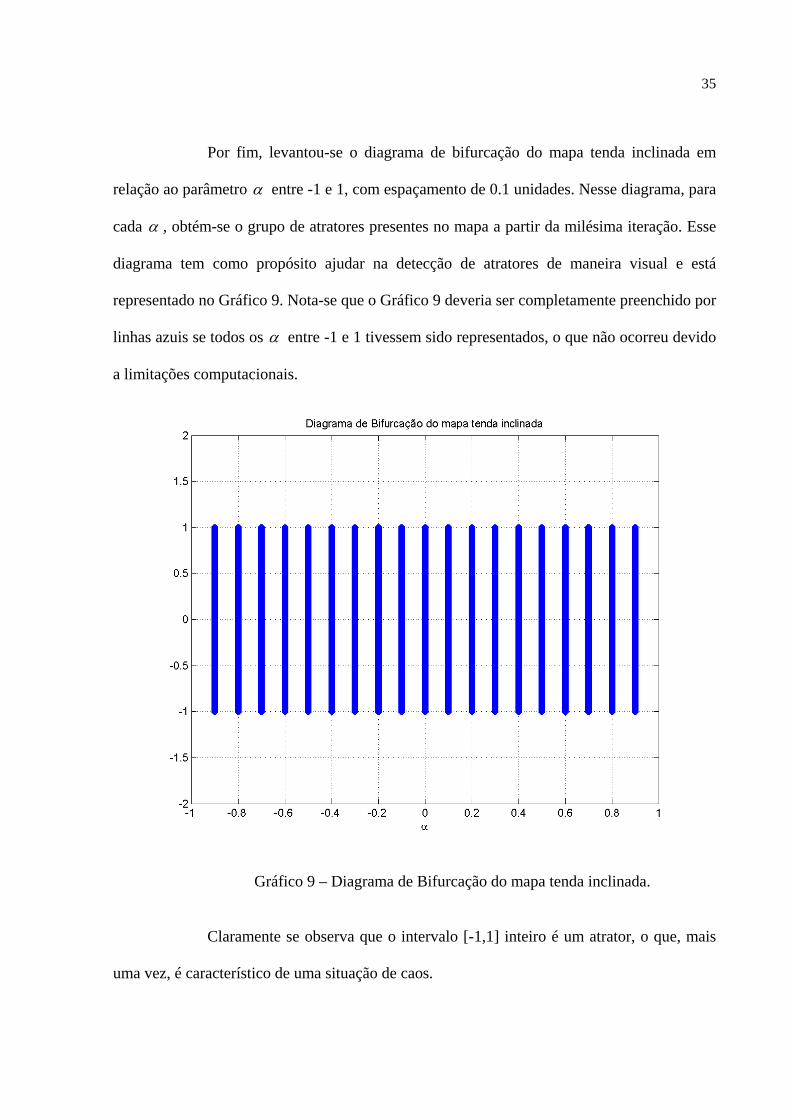
Por fim, levantou-se o diagrama de bifurcação do mapa tenda inclinada em
relação ao parâmetro α entre -1 e 1, com espaçamento de 0.1 unidades. Nesse diagrama, para
cada α , obtém-se o grupo de atratores presentes no mapa a partir da milésima iteração. Esse
diagrama tem como propósito ajudar na detecção de atratores de maneira visual e está
representado no Gráfico 9. Nota-se que o Gráfico 9 deveria ser completamente preenchido por
linhas azuis se todos os α entre -1 e 1 tivessem sido representados, o que não ocorreu devido
a limitações computacionais.
Gráfico 9 – Diagrama de Bifurcação do mapa tenda inclinada.
Claramente se observa que o intervalo [-1,1] inteiro é um atrator, o que, mais
uma vez, é característico de uma situação de caos.
36
3 ANÁLISE ESPECTRAL
A representação de funções matemáticas por meio da combinação linear de
funções trigonométricas foi estudo de muitos cientistas. Em principio, buscava –se representar
qualquer função )(tf por meio da série trigonométrica (RICIERI, 1993):
∑∞
=
++=1
cos)(k
kk senkxbkxaAtf (16)
Tal série é conhecida como a série de Fourier, em homenagem ao matemático
Jean Baptiste Joseph Fourier, cujas pesquisas nesse tema instigaram um grande
desenvolvimento no estudo de séries trigonométricas.
Inicialmente concebida em tempo contínuo, a série e a transformada de Fourier
em tempo contínuo foram bastante utilizada durante o período em que os sinais de
transmissão eram analógicos. Com o advento dos sinais digitais, os estudos da
série/transformada de Fourier em tempo discreto tornaram-se mais relevantes.
3.1 SÉRIE DE FOURIER EM TEMPO DISCRETO
Com o advento dos sinais digitais, uma grande quantidade de sinais
transmitidos não mais têm a característica de ser contínuo. Nesta fase digital, um sinal passou
a ser comumente representado por um número finito de n pontos amostrados ao invés de ser
representado pela sua totalidade de pontos. Isso significa que um sinal, antes descrito por uma
função continua )(tf é agora representado por uma função )()()( dsdk
dd tfkttutf −= ∑∞
−∞=
com

37
st sendo o período de amostragem e Zk ∈ . Para lidar com essa nova situação, uma
abordagem em tempo discreto passou a ser mais utilizada.
A série de Fourier em tempo discreto tem o seguinte propósito: representar um
sinal periódico como uma soma trigonométrica, mais precisamente nesse caso, como uma
soma de exponenciais complexas definida por (PROAKIS;MANOLAKIS, 1996):
∑−
=
=1
0
2)(
N
k
Nnkj
k ecnxπ
, sendo N o período do sinal )(nx (17)
Sendo:
∑−
=
−=
1
0
2)(1 N
n
Nnij
i enxN
cπ
(18)
3.2 TRANSFORMADA DE FOURIER EM TEMPO DISCRETO
A transformada de Fourier em tempo discreto é utilizada na análise espectral de
um sinal aperiódico e é definida como (PROAKIS;MANOLAKIS, 1996):
∑∞
−∞=
−=n
njenxX ωω )()( (19)
Tal transformada é periódica com o período de π2 já que :
∑∑∑∞
−∞=
−∞
−∞=
−−∞
−∞=
+− ====+n
nj
n
knjnj
n
nkj XenxeenxenxkX )()()()()2( 2)2( ωπω ϖπωπω (20)
38
Como condição de existência da transformada, o sinal deve possuir energia
finita, o que significa:
∑∞
−∞=
∞<n
nx 2)( (21)
Como operação inversa da transformada, defini-se:
∫−
=π
π
ϖ ωωπ
dexnx tj)(21)( (22)
3.3 DENSIDADE ESPECTRAL DE ENERGIA
Ao estudar um sinal, certas características devem ser aferidas. Entre elas, qual
a banda necessária para representar o sinal em questão. Para um sinal determinístico, um
primeiro passo em direção à resposta está em analisar a função de densidade de energia do
sinal, definido por (STOICA; MOSES, 1997):
2)()( ωω XS = (23)
Dessa forma, pode-se mostrar que:
∫∑−
∞
−∞=
=π
π
ωωπ
dSnxn
)(21)(
2
(24)
Esta última igualdade é chamada de teorema de Parserval e mostra que )(ωS
representa a distribuição de energia do sinal ao longo das freqüências.
Uma outra forma de obter o espetro de energia do sinal consiste em utilizar a
função de correlação, definida por (STOICA; MOSES, 1997):
39
∑∞
−∞=
−=n
knxnxk )()()(ρ (25)
Tem-se que:
∑ ∑ ∑ ∑ ∑∞
−∞=
∞
−∞=
∞
−∞=
∞
−∞=
∞
−∞=
−−−−− ==−=k k n n s
sjnjknjnjkj Sesxenxeeknxnxek )())()()(()()()( )( ωρ ωωωωω (26)
O que evidencia o fato de a Transformada de Fourier em tempo discreto da
correlação do sinal ser igual a função densidade espectral de energia do mesmo.
3.4 DENSIDADE ESPECTRAL DE POTÊNCIA PARA SINAIS ALEATÓRIOS
Ao analisar um sinal aleatório, um problema é observado para o levantamento
da densidade espectral de potência: o sinal não possui energia finita, o que significa que tal
sinal não possui uma transformada de Fourier em tempo discreto. No entanto, tais sinais
normalmente possuem uma potência média finita, o que significa que é possível obter uma
média de um espectro de densidade de potência.
Dessa forma, sendo Znny ∈),( um conjunto de pontos amostrados de um sinal
aleatório sob a hipótese de que ZnnyE ∈∀= ,0))(( , sendo )(⋅E a esperança do conjunto
amostrado, define-se a seqüência de covariância (ou função de covariância) para esse sinal da
seguinte forma (STOICA; MOSES, 1997):
)}()({)( * knynyEkr −= , sendo *y o vetor conjugado de y e Znk ∈, (27)
Pode-se mostrar que tal função possui as seguintes propriedades:
)()( * krkr −= (28)
)()0( krr ≥ , para todo Zk ∈ (29)

40
Dessa forma, define-se o espectro de densidade de potência de um sinal
aleatório da seguinte forma (STOICA; MOSES, 1997):
∑∞
−∞=
−=k
kiekr ωωφ )()( , (30)
cuja operação inversa é definida por
∫−
=π
π
ω ωωφπ
dekr ki)(21)( (31)
Por outro lado, se a seqüência de covariância )(ωφ tender a zero
suficientemente rápido tal que 0)(1lim =∑−=
∞→krk
N
N
NkN, temos que a seguinte definição da
densidade espectral de potência é equivalente a (STOICA; MOSES, 1997):
})(1{lim)(21
1∑−
=
−
∞→=
N
n
ni
Neny
NE ωωφ (32)
Como mais um parâmetro para caracterizar um sinal, utiliza-se o conceito de
largura de banda definido por (PROAKIS;MANOLAKIS, 1996):
Definição 3.1: a largura de banda de um sinal é o intervalo de freqüência em que p% de sua
energia está compreendida. Normalmente os percentuais adotados são p = 99, 95 ou 75.
Definição 3.2: a banda essencial de um sinal é definida como sendo o módulo da diferença
entre as freqüências extremas da largura de banda..

41
Com isso, é possível agora caracterizar um sinal de forma a obter informações
pertinentes ao seu uso na área de telecomunicação.
42
4 ANALISE ESPECTRAL DE SINAIS CAÓTICOS
Quando é feita uma referência a sinais caóticos, parte-se da premissa que trata-
se de um sinal de banda larga (LAU;TSE, 2003), dado o fato de ser um sinal aperiódico. Ou
seja, um sinal cujo espectro de energia é distribuído por uma larga faixa de freqüência. Ao fim
desse capítulo, esse princípio é averiguado por meio de uma série de simulações com o intuito
de medir a dispersão de sua energia ao longo do seu espectro de potência.
4.1 DESCRIÇÃO
Nas simulações a seguir, utiliza-se o mapa de tenda inclinada, Eq(14-15)
reescritas a seguir:
Tal mapa foi implementado na forma de código no Matlab que esta anexo no
apêndice sob o nome de “Lyano” .
Para cada valor de α , são realizadas duas formas distintas de simulação. Na
primeira, é fixada uma condição inicial 2.00 =x e são obtidos 10050 pontos da órbita do
mapa para cada um dos α entre [-0.9,0.9] com passo de 0,2. Na segunda etapa, diversas
simulações são realizadas com condições iniciais geradas aleatoriamente compreendidas entre
-0.9 e 0.9, o espectro de densidade de potência é registrado e o número de Lyapunov é
calculado bem como a largura de banda essencial do sinal. Esta é a faixa de freqüência que
43
abrange 95% da potência do sinal. O código usado para efetuar tais simulações esta anexado
no apêndice sob o nome de “Gráficos”.
4.2 RESULTADOS
Como parte da primeira etapa das simulações, fixou-se a condição inicial do
mapa tenda inclinada em 2.00 =x e gerou-se o mapa e o espectro de densidade espectral para
diversos valores de α .Para melhor visualização, foram mostrados apenas 200 pontos (dos
1500 calculados) da órbita do mapa para cada α . Nos gráficos dos espectros os eixos das
abscissas e ordenadas foram normalizadas e a freqüência máxima no eixo das abscissas do
espectro de potência,denominado ω , corresponde a metade da freqüência de amostragem.
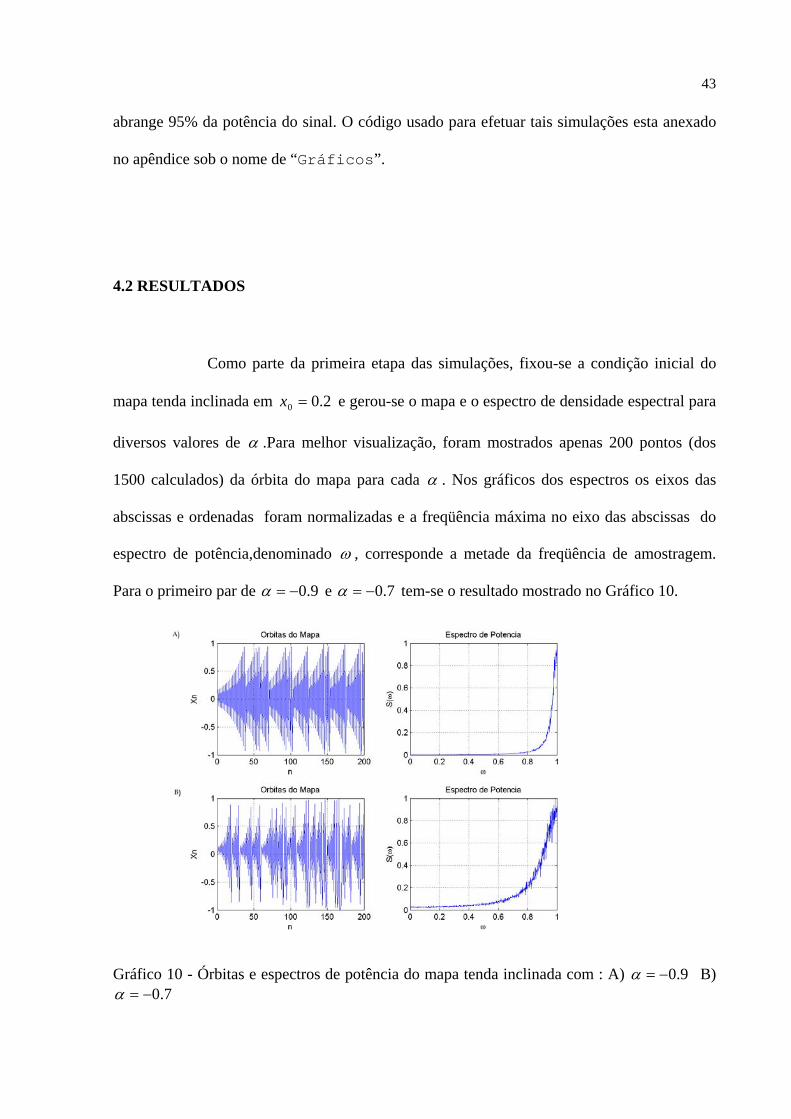
Para o primeiro par de 9.0−=α e 7.0−=α tem-se o resultado mostrado no Gráfico 10.
Gráfico 10 - Órbitas e espectros de potência do mapa tenda inclinada com : A) 9.0−=α B) 7.0−=α
44
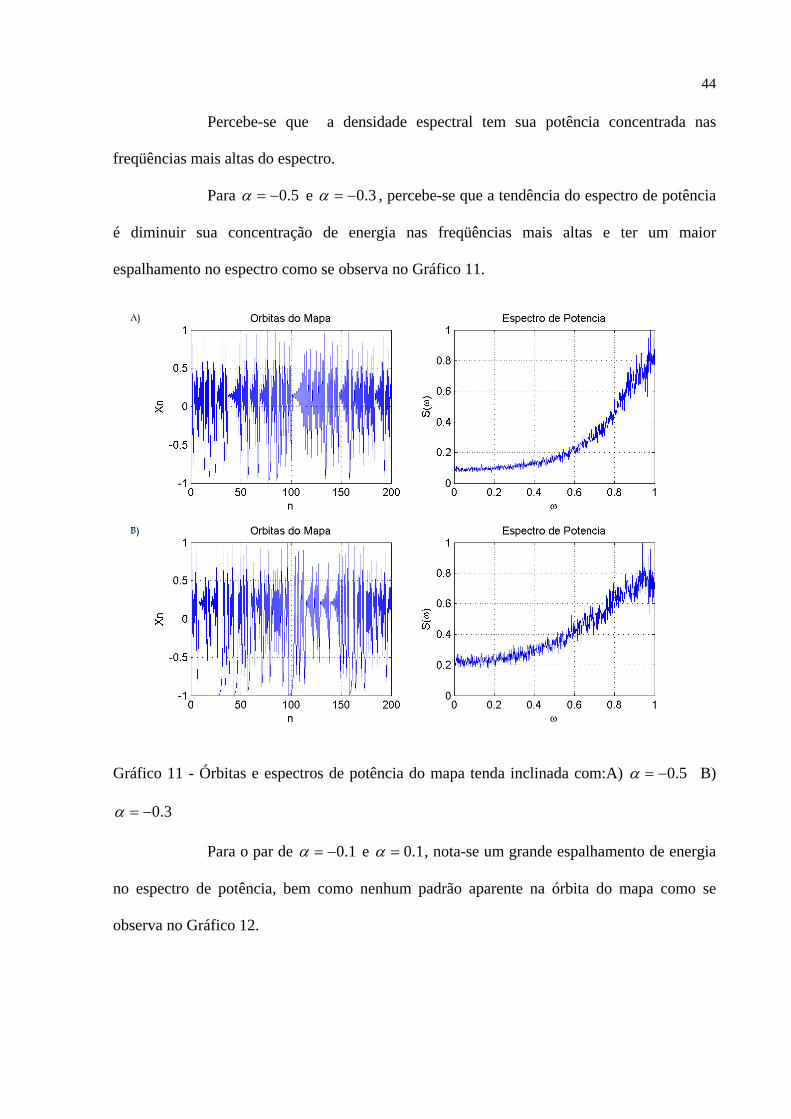
Percebe-se que a densidade espectral tem sua potência concentrada nas
freqüências mais altas do espectro.
Para 5.0−=α e 3.0−=α , percebe-se que a tendência do espectro de potência
é diminuir sua concentração de energia nas freqüências mais altas e ter um maior
espalhamento no espectro como se observa no Gráfico 11.
Gráfico 11 - Órbitas e espectros de potência do mapa tenda inclinada com:A) 5.0−=α B)
3.0−=α
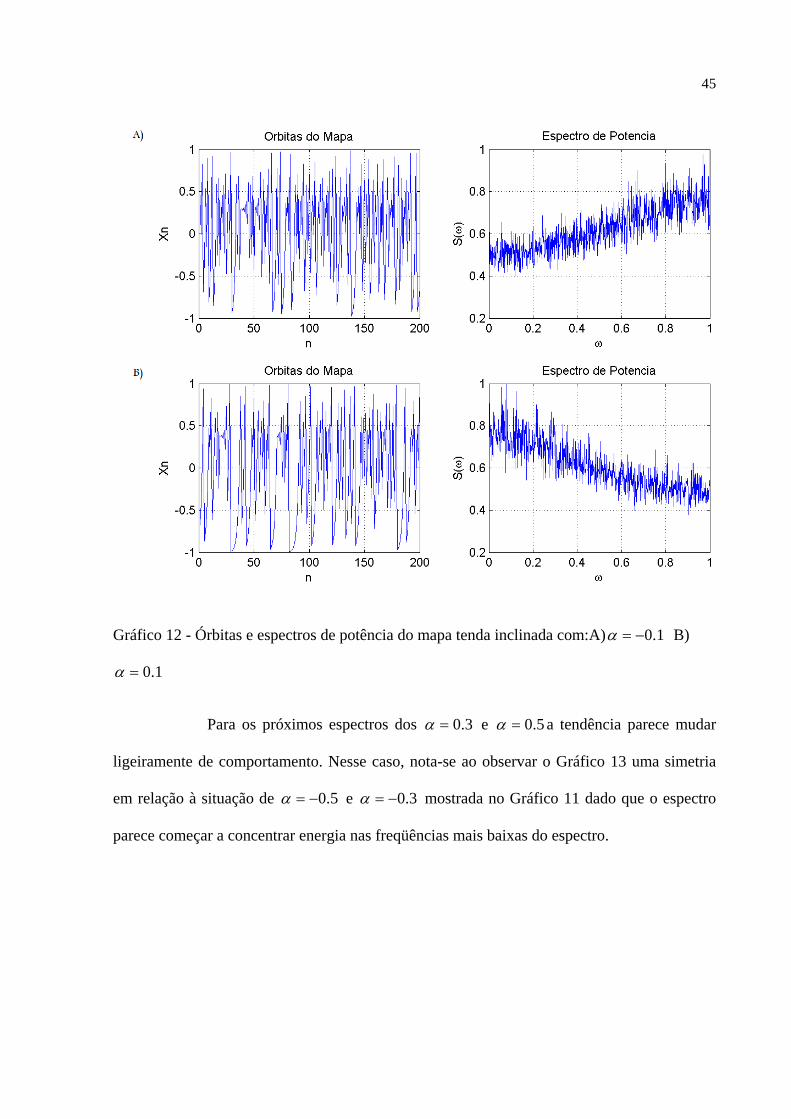
Para o par de 1.0−=α e 1.0=α , nota-se um grande espalhamento de energia
no espectro de potência, bem como nenhum padrão aparente na órbita do mapa como se
observa no Gráfico 12.
45
Gráfico 12 - Órbitas e espectros de potência do mapa tenda inclinada com:A) 1.0−=α B)
1.0=α
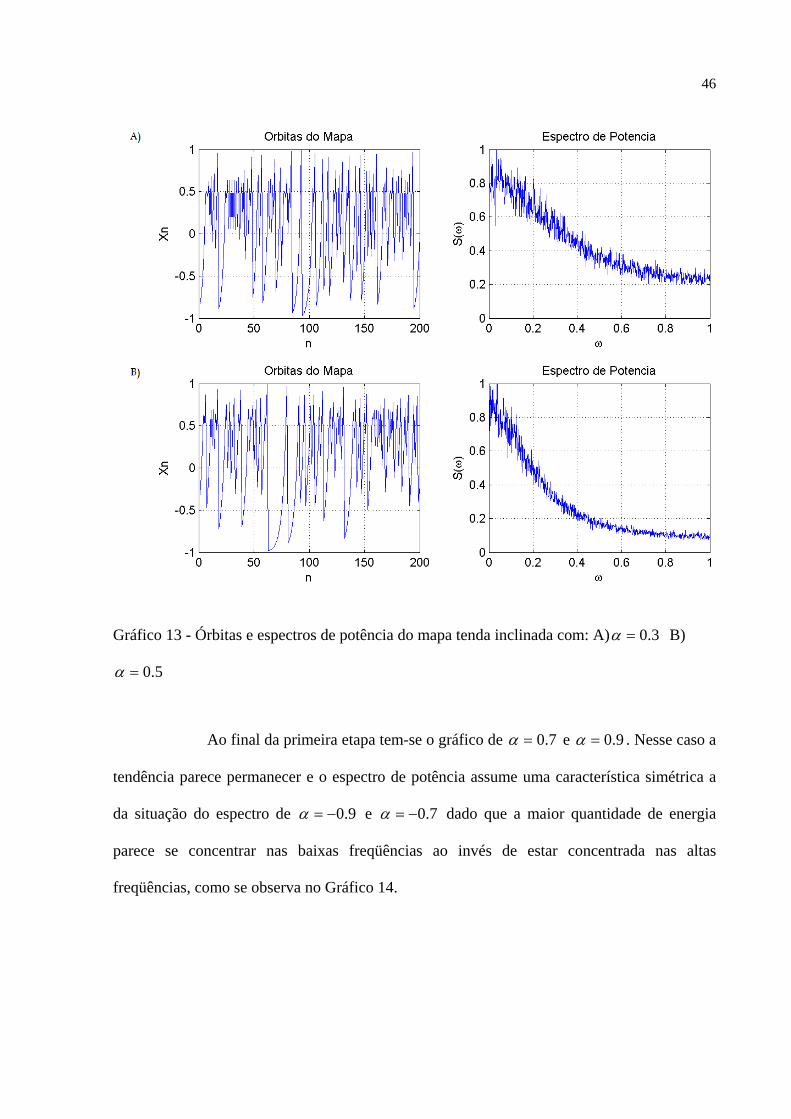
Para os próximos espectros dos 3.0=α e 5.0=α a tendência parece mudar
ligeiramente de comportamento. Nesse caso, nota-se ao observar o Gráfico 13 uma simetria
em relação à situação de 5.0−=α e 3.0−=α mostrada no Gráfico 11 dado que o espectro
parece começar a concentrar energia nas freqüências mais baixas do espectro.
46
Gráfico 13 - Órbitas e espectros de potência do mapa tenda inclinada com: A) 3.0=α B)
5.0=α
Ao final da primeira etapa tem-se o gráfico de 7.0=α e 9.0=α . Nesse caso a
tendência parece permanecer e o espectro de potência assume uma característica simétrica a
da situação do espectro de 9.0−=α e 7.0−=α dado que a maior quantidade de energia
parece se concentrar nas baixas freqüências ao invés de estar concentrada nas altas
freqüências, como se observa no Gráfico 14.

47
Gráfico 14 - Órbitas e espectros de potência do mapa tenda inclinada com: A) 7.0=α B)
9.0=α
Com o intuito de melhor solidificar a tendência observada, 1000 simulações
foram feitas para cada α descrito e um espectro de potência médio foi obtido. Para cada
simulação, uma condição inicial aleatória foi escolhida e, ao final das computações, foi obtida
a banda essencial do sinal, que seria a faixa de freqüência que contem 95% da energia do
espectro de potência médio, como mostrado no Gráfico 15.

48
Gráfico 15 - Espectro de Potência médio com :A) 9.0−=α ; B) 7.0−=α ; C) 5.0−=α ; D)
3.0−=α ; E) 1.0−=α ; F) 1.0=α ; G) 3.0=α ; H) 5.0=α ; I) 7.0=α ; J) 9.0=α ;
Pode-se observar que a tendência do sinal depende fortemente no α adotado.
Alem disso, pode-se ver pela largura de banda que cada α gera um sinal com características
bastante distintas, uma vez que a concentração de energia no espectro se desloca das altas
freqüências até as baixas freqüências a medida que o parâmetro α vai de -0.9 até +0.9.
Para uma análise menos visual e mais numérica, foi construída a Tabela1 com
as informações do número de Lyapunov e banda essencial para os gráficos 10,11,12,13 e 14
obtidos. Nota-se que para α entre [-0.9;-0.1] o número de Lyapunov e a banda essencial
aumentam à medida que o parâmetro aumenta. O inverso ocorre para α entre [0.1; 0.9] dado
que o número de Lyapunov e a banda essencial diminuem à medida que o parâmetro aumenta
49
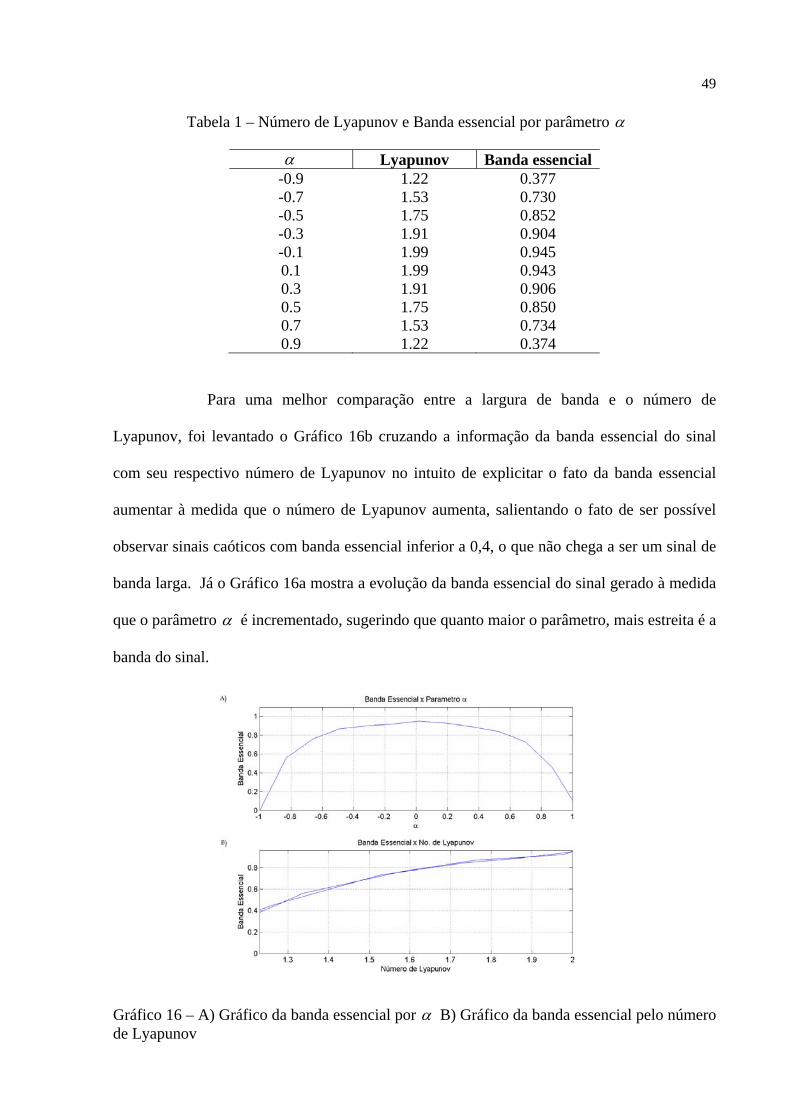
Tabela 1 – Número de Lyapunov e Banda essencial por parâmetro α
α Lyapunov Banda essencial -0.9 1.22 0.377 -0.7 1.53 0.730 -0.5 1.75 0.852 -0.3 1.91 0.904 -0.1 1.99 0.945 0.1 1.99 0.943 0.3 1.91 0.906 0.5 1.75 0.850 0.7 1.53 0.734 0.9 1.22 0.374
Para uma melhor comparação entre a largura de banda e o número de
Lyapunov, foi levantado o Gráfico 16b cruzando a informação da banda essencial do sinal
com seu respectivo número de Lyapunov no intuito de explicitar o fato da banda essencial
aumentar à medida que o número de Lyapunov aumenta, salientando o fato de ser possível
observar sinais caóticos com banda essencial inferior a 0,4, o que não chega a ser um sinal de
banda larga. Já o Gráfico 16a mostra a evolução da banda essencial do sinal gerado à medida
que o parâmetro α é incrementado, sugerindo que quanto maior o parâmetro, mais estreita é a
banda do sinal.
Gráfico 16 – A) Gráfico da banda essencial por α B) Gráfico da banda essencial pelo número de Lyapunov

50
Como medição final, montou-se o gráfico de autocorrelação do mapa para cada α
simulado. Tal gráfico tem como propósito medir o grau de oscilação do mapa e é mostrado no
gráfico 16.
Gráfico 17 - Autocorrelação dos sinais caóticos obtidos
Pela definição 3.15, tem-se que quanto maior a oscilação do sinal entre valores
positivos e negativos, maior a oscilação do gráfico de autocorrelação. Dessa forma, percebe-
se que o sinal se torna mais errático com valores próximos de =α -1 e menos oscilantes com
valores próximos de =α +1.
Dessa forma, ao final das simulações, averiguou-se que sinais caóticos podem
assumir características tanto de sinais de baixa freqüência, como de alta freqüência e, como
era de se esperar, de banda larga.

51
5 CONCLUSÕES
Durante o trabalho, abordou-se o que é um sistema dinâmico e as naturezas de
seu comportamento, dando especial atenção a situação denominada caos. Foram explicitadas
propriedades e definições sobre tal situação, bem como parâmetros para uma análise analítica
do caos, seguida da definição formal de um sinal caótico. Abordou-se o conceito de
transformada de Fourier, bem como o conceito de densidade espectral de potência dado que
são dois conceitos utilizados para caracterizar um sinal. Escolhe-se então o mapa de tenda
inclinada como exemplo de estudo e uma série de simulações são realizadas utilizando-se dos
conceitos de número de Lyapunov, densidade espectral de potência e largura de banda para
descrever o sinal.
Como foi observado, cada parâmetro α determina de maneira definitiva a
característica do espectro de potência. Para valores mais negativos de α , observou-se que os
sinais caóticos possuíam característica de alta freqüência. Para α próximo de zero, o sinal
possui característica de banca larga, com energia bem distribuída em todo o espectro de
potência. Já para α mais positivos o sinal assume característica de baixa freqüência.
Tais observações são válidas para quebrar a premissa de que os sinais caóticos
são sinais de banda larga. Afinal, como pôde ser observado, isso não é necessariamente
verdade. Fato que indiretamente nos leva a concluir que um sinal caótico pode ser um sinal
de banda limitada, o que significa que um sinal de tal natureza pode ser transmitido em um
canal de banda restrita.
Em termos práticos, um sinal caótico pode vir a ser usado em Telecomunicação
para transmitir informações dado que possui características espectrais compatíveis com
qualquer outro sinal existente atualmente, o que significa que os mesmos canais de
transmissões podem ser utilizados para propagar sinais com característica caótica.
52
Como trabalho futuro, é possível estudar formas de adaptar sistemas atuais para
utilizar sinais caóticos na transmissão de sinais. Entre muitas aplicações, a transmissão de
dados através de sinais caóticos traz o beneficio de ser um sinal difícil de interceptar dado sua
semelhança a um ruído branco em alguns casos. Tal característica pode ser útil na área de
telecomunicação pois contribui para a criptografia de dados sigilosos . Sua implementação, no
entanto, significa não apenas estabelecer novas regras de codificação e decodificação de
sinais, mas também projetar circuitos capazes de sincronizar e transmitir informações entre si
sem perda de dado.

53
REFERÊNCIAS
ALLIGOOD, Kathleen T.; SAUER, Tim D.; YORKE, James A. Chaos An Introduction To Dynamical Systems. IE-SPRINGER-VERLA, 1996. EISENCRAFT, Marcio. Contribuições da teoria da estimação para modulações digitais que utilizam sinais caóticos. São Paulo: Tese(Doutorado)-Escola Politécnica da Universidade de São Paulo-Departamento de Engenharia de Telecomunicações e Controle,2006. LAU, Francis C. M.; TSE, Chi K. Chaos-Based Digital Communication Systems: Operating Principles, Analysis Methods, and Performance Evaluation. Springer,2003 MONTEIRO, Luiz H. A. Sistemas dinâmicos. São Paulo : Ed. Livraria da Física, 2002. PROAKIS, John G. MANOLAKIS, Dimitris G. Digital Signal Processing. New Jersey:Upper Saddle River : Prentice Hall,1996 RICIERI, Aguinaldo P. Fractais e Caos:A matemática de hoje. São Jose dos Campos : Prandiano,1990. RICIERI, Aguinaldo P. Série de Fourier: Polinômios e outros bichos. São Jose dos Campos : Prandiano, 1993. STOICA, Petre ; MOSES, Randolph. Introduction to Spectral Analysis. New Jersey:Upper Saddle River : Prentice Hall,1997.
54
APÊNDICE – CÓDIGO USADO NA SIMULAÇÃO DE SINAIS CAÓTICOS
A função a seguir escrita em MatLab calcula as órbitas do mapa tenda inclinada, registrando
tais valores no variável “ske”. A função retorna também o número de Lyapunov pela variável
lya e lyateo (teórico), bem como a largura de banda do sinal.A função recebe como entrada
os parâmetro alpha, condição inicial “s0”, número de órbitas a serem calculadas “n” e um
parâmetro DUMMIE “randd” que sinaliza se a condição inicial será randômica ou não. No
caso afirmativo, “s0” é ignorada.
function [ske,Dske,Lya,Fou,x,LyaTEO,Banda] = lyapu(alpha,s0,n,randd) %Parte responsavel pela condicao inicial do sistema if randd == 0 ske = s0; else ske = rand(1); end %Definicao da derivada do mapra tenda inclinada if (s0>=-1) & (s0<alpha) Dske= 2/(alpha+1); elseif s0<=1 & s0>=alpha Dske = 2/(alpha-1); else Dske = inf; end %Definicao da funcao que ira gerar o mapa tenda inclinada for i = 2:(n), if (ske(i-1)>=-1) & (ske(i-1)<alpha) temp = 2/(alpha+1)*ske(i-1) + (1-alpha)/(alpha+1); elseif ske(i-1)<=1 & ske(i-1)>=alpha temp = 2/(alpha-1)*ske(i-1)-(alpha+1)/(alpha-1); else temp = inf; end ske = [ske temp]; if (temp>=-1) & (temp<alpha) temp2= 2/(alpha+1); elseif temp<=1 & temp>=alpha temp2 = 2/(alpha-1); else temp2 = inf; end Dske = [Dske temp2]; end %Parte ignora as 100 primeiras observacoes ske = ske(1,100:(n)) ; Dske = Dske(1,100:(n)); Lya =1; [a,b] = size(Dske); for i = 1:b,
55
Lya = abs(Dske(1,i)) * Lya; end %Calcula-se o número de Lyapunov Lya = Lya^1/b; LyaTEO = (2/(alpha+1))^((alpha+1)/2)*(2/(1-alpha))^((1-alpha)/2); Fou = abs(fft(ske)).^2; [a,b] = size(Fou); %Dado a simetria da densidade espectral de potência, é descaratado metade %do espectro. pico = max(Fou); Fpico = 1; temp =0; while temp ~= pico, temp = Fou(1,Fpico); Fpico = Fpico +1; end Fpico = Fpico/b; x = 1/b; b = round(b/2); Fou = Fou(1,1:b); for i = 2:1:b, x = [x i/b]; end int =0; for iii=1:b, int =int+ Fou(iii); end %Calculo da banda essencial. int2=0; if Fpico <0.25 kk=1; while int2 <0.95*int, if kk ==1 freq=0; else freq = freq +1/b ; end int2 =int2+ Fou(kk); kk = kk+1; end else kk=b; while int2 <0.95*int, if kk ==b freq=1; else freq = freq -1/b ; end int2 =int2+ Fou(kk); kk = kk-1; end end freq = freq*100; freq = round(freq); freq = freq/100; if Fpico <0.25 Banda = 0; Banda = [Banda freq]; else Banda = freq;

56
Banda = [Banda 1]; end a = 'Alpha_'; b = num2str(alpha); if randd == 0 d = [a b]; else c = 'rand' ; d = [a b c]; end % Função que constroi todos os graficos usados no trabalho % Grafico 1 , 2 , 3 e 4 for num = 1:4 close % Define as condicoes iniciais para cada grafico if num == 1 x = 0.01; end if num == 2 x = 0.4794; end if num == 3 x = 0.0001; end if num == 4 x = 0.01; end % Gera a orbita a partir da condicao inicial for i = 1:80 if num == 1 y1(i) = ga(2,x(i)); end if num == 2 y1(i) = ga(3.3,x(i)); end if num == 3 y1(i) = 2*x(i); end if num == 4 y1(i) = ga(3.9,x(i)); end x(i+1)=y1(i); end y1 = y1(1:80); y1 = [ x(1,1) y1]; x = 0:80; % Plota o grafico com seus devidos titulos plot(x,y1) hold on; if num == 1 temp0 = ' Mapa f(x)=2x(1-x)'; end if num == 2 temp0 = ' Mapa f(x)=3.3x(1-x)'; end if num == 3

57
temp0 = ' Mapa f(x)=2x'; end if num == 4 temp0 = ' Mapa f(x)=3.9x(1-x)'; end title(temp0); if num == 1 | num ==2 axis([0 20 0 1]); end if num ==4 axis([0 60 0 1]); end if num ==3 axis([0 20 0 100]); end hold on grid on hold on xlabel('n'); ylabel('Xn'); extensao = strcat('Grafico ',num2str(num),temp0,'.tiff'); saveas(gcf,extensao, 'tiffn'); end % Grafico 5 clear close for num = 1:2 % Acerta as condicoes iniciais if num == 1 x = 0.01; end if num == 2 x = 0.0101; end % Calcula a orbita da condicao inicial for i = 1:81 y(num,i) = ga(3.82,x(i)); x(i+1)=y(i); end % Plota as orbitas x = 0:80; subplot(3,1,num); plot(x,y(num,:)) hold on; if num == 1 temp = num2str(0.01); else temp = num2str(0.0101); end a = strcat(' f(x)=3.82x(1-x) com condição inicial x= ',temp); title(a); hold on grid on hold on xlabel('n'); if num ==2

58
ylabel('Yn'); else ylabel('Xn'); end end % Calcula o grafico da diferenca diff = abs(y(1,:)-y(2,:)); subplot(3,1,3); plot(x,diff) hold on; a = [' Grafico da Diferença Absoluta |f(x)-f´(x)|' ]; title(a); hold on grid on hold on xlabel('n'); ylabel('|Xn-Yn|'); saveas(gcf,'Grafico5 da Dif Abs.tiff', 'tiffn') % Grafico 6 clear close for a = 1:0.03:4, for ii = 1:10, x0 = rand(1); y = 0; for i=1:200, yt = ga(a,x0); x0 = yt; y = [y yt]; end k = size(y); y = y(1,101:k(1,2)); x = ones(1,k(1,2)-100); x = x*a; plot(x,y,'b .') hold on end end grid on title('Diagrama de Bifurcação de f(x)=ax(1-x)') ylabel('Xn'); xlabel('a'); saveas(gcf,'Grafico6 Bifuc.tiff', 'tiffn') % Grafico 7 clear close iteracoes = 1 kk=1 for i = -1:0.01:iteracoes, [skew,Dskew,lyam,FouNEW,x,lyamTEO,bandanew]=lyapu(i,0.2,1500,1); Lyaa(kk) = lyamTEO; xxx(kk) = i;

59
kk = kk+1; end plot(xxx,Lyaa) hold on xlabel('Alpha'); hold on ylabel('h'); hold on grid on hold on title('h vs Alpha'); saveas(gcf,'Grafico7 Alphas e Lyapo.tiff', 'tiffn') close % Grafico 8 [skew1,Dskew,lyam,FouNEW,x,lyamTEO,bandanew]=lyapu(-0.9,0.1,1500,0); [skew2,Dskew,lyam,FouNEW,x,lyamTEO,bandanew]=lyapu(-0.9,0.11,1500,0); dif1 = abs(skew1-skew2); [skew4,Dskew,lyam,FouNEW,x,lyamTEO,bandanew]=lyapu(-0.6,0.1,1500,0); [skew5,Dskew,lyam,FouNEW,x,lyamTEO,bandanew]=lyapu(-0.6,0.11,1500,0); dif2 = abs(skew4-skew5); [skew7,Dskew,lyam,FouNEW,x,lyamTEO,bandanew]=lyapu(0.01,0.1,1500,0); [skew8,Dskew,lyam,FouNEW,x,lyamTEO,bandanew]=lyapu(0.01,0.11,1500,0); dif3 = abs(skew7-skew8); temp = size(skew1) x = 0:1:(temp(1,2)-1); subplot(3,2,1) plot(x,skew1) axis([0 200 -1 1]); title('Alpha = -0.9 , x0=0.1') xlabel('n'); ylabel('Xn'); grid on subplot(3,2,2) plot(x,skew2,'g') axis([0 200 -1 1]); title('Alpha = -0.9 , x0=0.11') xlabel('n'); ylabel('Xn'); grid on subplot(3,2,3) plot(x,skew4) axis([0 200 -1 1]); title('Alpha = -0.6 , x0=0.1') xlabel('n'); ylabel('Xn'); grid on subplot(3,2,4) plot(x,skew5,'g') axis([0 200 -1 1]);
60
title('Alpha = -0.6 , x0=0.11') xlabel('n'); ylabel('Xn'); grid on subplot(3,2,5) plot(x,skew7) axis([0 200 -1 1]); title('Alpha = 0 , x0=0.1') xlabel('n'); ylabel('Xn'); grid on subplot(3,2,6) plot(x,skew8,'g') axis([0 200 -1 1]); title('Alpha = 0 , x0=0.11') xlabel('n'); ylabel('Xn'); grid on saveas(gcf,'Grafico8 Diferena absoluta.tiff', 'tiffn') % Grafico 9 close clear for a = -0.9:0.1:0.9; for ii = 1:10; x0 = 0; if a ==0 [skew1,Dskew,lyam,FouNEW,x,lyamTEO,bandanew]=lyapu(0.01,x0,3000,1); else [skew1,Dskew,lyam,FouNEW,x,lyamTEO,bandanew]=lyapu(a,x0,3000,1); end k = size(skew1); skew1 = skew1(1,1000:k(1,2)); k = size(skew1); x = ones(1,k(1,2)); x = x*a; plot(x,skew1,'b o') hold on end end grid on hold on title('Diagrama de Bifurcação do mapa tenda inclinada') xlabel('Alpha'); saveas(gcf,'Grafico9 BifurcTENDA.tiff', 'tiffn') % Grafico 10 , 11 , 12 ,13 e 14 clear close count = 1 cod_ini = -0.9:0.2:0.9; % loop que fara 10 graficos, cada um com sua respectiva condicao inicial % cara grafico sera o resutado do sinal medio de "n" iteracoes for num = 1:10
61
iteracoes = 100 if count ==3 close count=1 end for i = 1:iteracoes, [skew,Dskew,lyam,FouNEW,x,lyamTEO,bandanew]=lyapu(cod_ini(num),0.2,1500,1); if i ==1 Fou = FouNEW; band = bandanew; else Fou = Fou + FouNEW; band = band + bandanew; end end % parte que prepara graficos com a informacao de banda essencial % e número de Lyapunov banda = band/iteracoes Fou = Fou/iteracoes; c = max(Fou); Fou = Fou/c; subplot(2,2,2*count); plot(x,Fou) grid on hold on; temp1 = num2str(round(banda(1,1)*1000)/1000 ); temp2 = num2str(round(banda(1,2)*1000)/1000 ); temp = ' Banda Essencial =' temp4 = ' ate ' bandaS = [temp temp1 temp4 temp2]; lyamTEO = round(lyamTEO*100)/100 temp = num2str(lyamTEO); Lyan = [' Num. Lyapunov = ' temp]; titulo = [bandaS Lyan] title(titulo); hold on grid on hold on xlabel('w'); ylabel('S(w)') hold on subplot(2,2,2*count-1); skewG = skew(1,1000:1:1200); tam = size(skewG); xx = 1:1:tam(1,2); plot(xx,skewG) grid on hold on xlabel('n'); ylabel('Xn'); hold on axis([0 200 -1 1]) hold on; title('Orbitas do Mapa'); hold on; count = count +1 if count ==3 numgraf = num2str(8+ num) nome_arq = strcat('Grafico',numgraf,' ',' Alpha ',num2str(cod_ini(num-1)),' e',num2str(cod_ini(num)),'.tiff')

62
saveas(gcf,nome_arq, 'tiffn') end end % Grafico 15 clear close cod_ini = -0.9:0.2:0.9; % loop que fara 10 graficos, cada um com sua respectiva condicao inicial % cara grafico sera o resutado do sinal medio de "n" iteracoes for num = 1:10 iteracoes = 1000 for i = 1:iteracoes, [skew,Dskew,lyam,FouNEW,x,lyamTEO,bandanew]=lyapu(cod_ini(num),0.2,1500,1); if i ==1 Fou = FouNEW; band = bandanew; else Fou = Fou + FouNEW; band = band + bandanew; end end % parte que prepara graficos com a informacao de banda essencial % e número de Lyapunov banda = band/iteracoes Fou = Fou/iteracoes; c = max(Fou); Fou = Fou/c; subplot(5,2,num); plot(x,Fou) grid on hold on; temp1 = num2str(round(banda(1,1)*1000)/1000 ); temp2 = num2str(round(banda(1,2)*1000)/1000 ); temp = ' Banda =' temp4 = ' ate ' bandaS = [temp temp1 temp4 temp2]; lyamTEO = round(lyamTEO*100)/100 temp = num2str(cod_ini(num)); Lyan = [' Alpha = ' temp]; titulo = [bandaS Lyan] title(titulo); hold on grid on hold on xlabel('w'); ylabel('S(w)') hold on end nome_arq = strcat('Grafico','15',' ',' Alpha ','Alpha Unificado','.tiff') saveas(gcf,nome_arq, 'tiffn') % Grafico 16 clear; close; count =1;

63
for kkk = -0.9:0.2:0.9 [skew,Dskew,lyam1,FouNEW,x,lyamTEO(count,:),bandanew(count,:)]=lyapu(kkk,0.2,10050,0); b(count,1) = abs(bandanew(count,1) - bandanew(count,2) ); count = count +1; end count = count-1 Alpha = -0.9:0.2:0.9; b = transpose(b); lyamTEO = transpose(lyamTEO); subplot(2,1,1) plot(Alpha,b) grid on xlabel('Alpha'); ylabel('Banda Essencial'); title('Banda Essencial x Parametro Alpha'); axis([-0.9 0.9 0 1.1]) subplot(2,1,2) plot( lyamTEO(1:6),b(1:6)) grid on xlabel('Número de Lyapunov'); ylabel('Banda Essencial'); title('Banda Essencial x No. de Lyapunov'); axis([1.23 2 0 0.96]) saveas(gcf,'Grafico20 Alpha e banda.tiff', 'tiffn') % Grafico 17 clear close cod_ini = -0.9:0.2:0.9; for num = 1:10 [skew,Dskew,lyam,FouNEW,x,lyamTEO,bandanew]=lyapu(cod_ini(num),0.2,1000,0); skew = skew(200:400); yy = xcorr(skew); m = max(yy); yy = yy/m; yy = yy(191:211); temp =size(yy); x = 1:temp(1,2); xx = -11*ones(1,temp(1,2)); x = x+xx; subplot(5,2,num); plot(x,yy) hold on; titulo = strcat('Correlação do mapa de Alpha = ',num2str(cod_ini(num))); title(titulo); hold on grid on hold on xlabel('k'); end saveas(gcf,'Grafico21 Correlacao.tiff', 'tiffn')

![n [n] = H - professor.ufabc.edu.brprofessor.ufabc.edu.br/marcio.eisencraft/pds/EN2610-Aula19.pdf · Fatorando, obtemos: ( ) ( ) ∏( ) ...](https://static.fdocuments.net/doc/165x107/5c608c1509d3f22a6a8ba408/n-n-h-fatorando-obtemos-.jpg)


![ApresentaINPE [Modo de Compatibilidade]professor.ufabc.edu.br/marcio.eisencraft/Artigos/ApresentaINPE2009.pdf• Diagrama em blocos de um sistema SS básico 5.1 Princípios Básicos](https://static.fdocuments.net/doc/165x107/6031d8b94979bf50cb343942/apresentainpe-modo-de-compatibilidade-a-diagrama-em-blocos-de-um-sistema-ss.jpg)




![1 [] N []professor.ufabc.edu.br/marcio.eisencraft/pds/EN2610-Aula... · 2012-04-04 · Comunicações Digitais 1 – Aula 16– Professor Marcio Eisencraft – abril 2012 6 Exercícios](https://static.fdocuments.net/doc/165x107/5e3d3337a368250bc76a021e/1-n-2012-04-04-comunicaes-digitais-1-a-aula-16a-professor-marcio.jpg)








