IC6501 - CS 2 MARKS WITH ANSWERS.doc
41
S.A.ENGINEERING COLLEGE (NBA Accredited, NAAC with ‘A’ grade & ISO 9001 !00" Certi#ied I$%titti'$ A))r'*ed B+ AICE & A##i-iated t' A$$a $i*er%it+ /ESION BAN S2ect C'de IC3401 S2ect Na5e CONROL S6SE7S Acade5ic 6ear !014 8 !013 ( O 6ear : Se5 III : ; S5itted B+ .S.7ARGARE e)art5e$t EEE Sig$atre '# the Sta## Sig$atre '# the <O
-
Upload
marrgaretvijay -
Category
Documents
-
view
231 -
download
0
Transcript of IC6501 - CS 2 MARKS WITH ANSWERS.doc
7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 1/41
S.A.ENGINEERING COLLEGE
(NBA Accredited, NAAC with ‘A’ grade & ISO 9001 !00"
Certi#ied I$%titti'$
A))r'*ed B+ AICE & A##i-iated t' A$$a $i*er%it+
/ESION BAN
S2ect C'de IC3401
S2ect Na5e CONROL S6SE7SAcade5ic 6ear !014 8 !013 ( O
6ear : Se5 III : ;
S5itted B+ .S.7ARGARE
e)art5e$t EEE
Sig$atre '# the Sta## Sig$atre '# the <O

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 2/41
S.A ENGINEERING COLLEGE
E=AR7EN O> ELECRICAL AN ELECRONICS ENGINEERING
;I SI ON
O BE A LEAER IN ENGINEERING ECAION,
RESEARC< AN O A==L6 <E NO?LEGE =RACICAL6
>OR <E BENE>I O> SOCIE6 GLOBALL6.
7I SSION
O SRI;E >OR =ROCI;E =ARNERS<I= BE?EEN
<E INSR6 AN <E INSIE.
O ENCORAGE AN >ACILIAE >ACL6,
RESEARC<ERS AN SENS O ?OR S6NERGISICALL6
ACROSS ISCI=LINE ?I<O BONRIES.
O >OSER LI>ELONG LEARNING AN E7=O?ER
SENS O BECO7E O7ORRO?’S LEAERS

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 3/41
=R O G R A7 7 E E C A I O N A L O B @ E C I ; E S
1. ' )r'*ide %tde$t% with %'$d #$da5e$ta- $'w -edge
c'5i$ed with g''d )ractica- 'rie$tati'$ %' a% t' ide$ti#+ a$d a))-+
their r'ad $der%ta$di$g ' # the %2ect t' %'-*e rea- ti5e
)r'-e5%
!. ' ri$g a't a$ e##ecti*e teachi$g 8 -ear$i$g )r'ce%% +
which the %tde$t% wi-- gai$ high %e-# c'$#ide$ce with g''d *era-
tech$ica- c'55$icati'$ %i--% a$d i$ter)er%'$a- %i--% $eeded
t' ece- i$ their )r'#e%%i'$a- career a$d ad*a$ce5e$t
. Ece--e$t acade5ic e$*ir'$5e$t '# the i$%titti'$ wi--
)r'*ide the %tde$t% with a %tr'$g ethica- attitde, aware$e%% '#
rece$t de*e-')5e$t% i$ tech$'-'g+, #'r a))r')riate tech$'-'gica-
%'-ti'$% t' c'5)-e )r'-e5% which are the 5'%t reDired i$)re%e$t da+ w'r-d.
. ' )re)are %tde$t% t' e %cce%%#- i$ i$d%tria- career% that
5eet the $eed% '# I$dia$ a$d 5-ti$ati'$a- c'5)a$ie%
4. ' create aware$e%% '$ c'$te5)'rar+ i%%e% thi% wi-- he-) the
%tde$t% t' )artici)ate i$ c'5)etiti*e ea5i$ati'$
7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 4/41
=RO GRA 77E OC O 7ES
a. Graduates will demonstrate high fundamental knowledge in applied Science andEngineering
b. Graduates will demonstrate the ability to design, conduct experiments, analyze and
solve practical industrial problems
c. Graduates will have the ability to communicate any complex problems in a
simplified manner
d. Graduates will demonstrate the capability to suit themselves in research teams in their
specialization as w ell as to work on multidisciplinary teams
e. Graduates will demonstrate the ability to identify, formulate and solve Electrical and
Electronics engineering problems
f. Graduates will demonstrate an understanding of their professional and ethical
responsibilities
g. Graduates will be able to communicate effectively in both verbal and written forms
h. Graduates will have the confidence to apply engineering solutions in societal, national
and global contexts
i. Graduates will be capable of advancing their know ledge with cutting edgetechnologies to excel in their career to achieve their desired goals
j. Graduates will be broadly educated and will have an understanding of the impact of
engineering on society and demonstrate awareness of contemporary issues
k. Graduates will be familiar with modern engineering software tools and euipment to
analyze Electrical engineering problems
l. Graduates will posses right attitude to become responsible electrical engineers in the
societym. Graduates will be capable of applying appropriate technologies for real!time problems
n. Graduates will be able to adjust themselves to adhere to the complex environment in
the outside world

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 5/41
COURSE OBJECTIVE(S)
". #o understand the use of transfer function models for analysis physical systems and
introduce the control system components.
$. #o provide adeuate knowledge in the time response of systems and steady state error
analysis.
%. #o accord basic knowledge in obtaining the open loop and closed&loop freuency
responses of systems.
'. #o introduce stability analysis and design of compensators.
(. #o introduce state variable representation of physical systems and study the
effect of state feedback.
COURSE OUTCOME(S)
Student should be able to
1. )dentify the basic elements and structures of feedback control systems, derive linearized
models and their transfer function representations for multi!input multi!output systems
and use signal!flow graphs to derive system*s input!output relations.
2. +orrelate the pole!zero configuration of transfer functions and their time!domain
response to known test inputs, construct and recognize the properties of root!locus for
feedback control systems such as , ), )- modes.
3. +onstruct ode and polar plots for rational transfer functions and analysis of lag lead, lag
&lead compensation. Specify control system performance in the freuency!domain in
terms of gain and phase margins, and design compensators to achieve
the desired performance.
4. /pply 0outh!1urwitz criterion and 2yuist stability criterion to determine the domain of
stability of linear time!invariant systems in the parameter space. /lso understand the
compensator design.
5. /pply the concept of controllability and observability to analyse linear, nonlinear, time &
invariant or time varying systems.

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 6/41
Attai$5e$t '# =r'gra55e Otc'5e%
C'rre-ati'$ etwee$ the C'r%e 'tc'5e% a$d the =r'gra55e 'tc'5e%
C'r%e
'tc'5e%
=r'gra55e '&tc'5e%
a c d e # g h i 2 - 5 $
1 3 4
! 4 3 3 3 4
4 3 3 3 4
4 3 3 3 4
4 4 3 3 3 3 4
3 ! Strong contribution
4 ! 5eak contribution

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 7/41
S6LLABS
IC3401 CONROL S6SE7S L = C
1 0
OB@ECI;ES
• #o understand the use of transfer function models for analysis physical systems andintroduce the control system components.
• #o provide adeuate knowledge in the time response of systems and steady state error analysis.• #o accord basic knowledge in obtaining the open loop and closed&loop freuency responses
of systems.• #o introduce stability analysis and design of compensators• #o introduce state variable representation of physical systems and study the effect
of state feedback NI I S6SE7S AN <EIR RE=RESENAION 9asic elements in control systems & 6pen and closed loop systems & Electrical analogyof mechanical and thermal systems & #ransfer function & Synchros & /+ and -+ servomotors &lock diagram reduction techniues & Signal flow graphs.NI II I7E RES=ONSE 9
#ime response & #ime domain specifications & #ypes of test input & ) and )) order system response & Error coefficients & Generalized error series & Steady state error & 0oot locus construction! Effects of , ), )- modes of feedback control &#ime response analysis.NI III >RE/ENC6 RES=ONSE 97reuency response & ode plot & olar plot & -etermination of closed loop response from open loopresponse ! +orrelation between freuency domain and time domain specifications! Effect of 8ag,lead and lag!lead compensation on freuency response! /nalysis.NI I; SABILI6 AN CO7=ENSAOR ESIGN 9+haracteristics euation & 0outh 1urwitz criterion & 2yuist stability criterion! erformance criteria & 8ag, lead and lag!lead networks & 8ag98ead compensator design using bode plots.NI ; SAE ;ARIABLE ANAL6SIS 9
+oncept of state variables & State models for linear and time invariant Systems & Solution of
state and output euation in controllable canonical form & +oncepts of controllability andobservability & Effect of state feedback.
OCO7ES
OAL (L 4F 14 30 =ERIOS
• /bility to understand and apply basic science, circuit theory, theory control theorySignal processing and apply them to electrical engineering problems.
E BOOS
". :. Gopal, ;+ontrol Systems, rinciples and -esign*, 'th Edition, #ata :cGraw 1ill, 2ew -elhi,$<"$
$. S.=.hattacharya, +ontrol System Engineering, %rd Edition, earson, $<"%.
%. -hanesh. 2. :anik, +ontrol System, +engage 8earning, $<"$.RE>ERENCES". /rthur, G.6.:utambara, -esign and /nalysis of +ontrol> Systems, +0+ ress, $<<?.$. 0ichard +. -orf and 0obert 1. ishop, @ :odern +ontrol SystemsA, earson rentice
1all, $<"$.%. enjamin +. =uo, /utomatic +ontrol systems, Bth Edition, 1), $<"<.'. =. 6gata, ;:odern +ontrol Engineering*, (th edition, 1), $<"$.
(. S.2.Sivanandam, S.2.-eepa, +ontrol System Engineering using :at 8ab, $nd Edition,Cikas ublishing, $<"$.
D. S.alani, /noop. =.airath, /utomatic +ontrol Systems including :at 8ab, Cijay 2icole9 :cgraw1ill Education, $<"%.

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 8/41
NI I H S6SE7S AN <EIR RE=RESENAION
?O 7ARS
". ?hat are the a%ic e-e5e$t% %ed #'r 5'de-i$g 5echa$ica- tra$%-ati'$a- %+%te5.
:ass, spring and dashpot
$. ?hat are the a%ic e-e5e$t% %ed #'r 5'de-i$g 5echa$ica- r'tati'$a- %+%te5
:oment of inertia ,
-ashpot with rotational frictional coefficient
0otations spring with stiffness =.
%. Na5e tw' t+)e% '# e-ectrica- a$a-'g'% #'r 5echa$ica- %+%te5.
#he two types of analogies for the mechanical system are 7orce voltage and
force current analogy.
'. ?hat i% -'c diagra5
/ block diagram of a system is a pictorial representation of the functions performed by
each component of the system and shows the flow of signals. #he basic elements of
block diagram are block, branch point and summing point.
(. ?hat i% the a%i% #'r #ra5i$g the r-e% '# -'c diagra5 redcti'$ tech$iDe
#he rules for block diagram reduction techniue are framed such that any
modification made on the diagram does not alter the input output relation.
D. ?hat i% a %ig$a- #-'w gra)h
/ signal flow graph is a diagram that represents a set of simultaneous algebraic
euations. y taking 8.# the time domain differential euations governing a
control system can be transferred to a set of algebraic euations in s!domain.
B. ?hat i% tra$%5itta$ce
#he transmittance is the gain acuired by the signal when it travels from one node
to another node in signal flow graph.
F. ?hat i% %i$ a$d %'rce
Source is the input node in the signal flow graph and it has only outgoing branches.
Sink is an output node in the signal flow graph and it has only incoming branches.
?. e#i$e $'$ t'chi$g -'').
#he loops are said to be non touching if they do not have commonnodes.

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 9/41
"<. ?rite 7a%'$% Gai$ #'r5-a.
:asons Gain formula states that the overall gain of the system is
# "9 HIk k Hk
k! 2o.of forward paths in the signal flow graph.
k! 7orward path gain of kth forward path
H "!Jsum of individual loop gains K LJsum of gain products of all possible combinations of
two non touching loopsK!Jsum of gain products of all possible combinations of three non
touching loopsKLM
Hk ! H for that part of the graph which is not touching kth forward path.
"". ?rite the a$a-'g'% e-ectrica- e-e5e$t% i$ #'rce *'-tage a$a-'g+ #'r the e-e5e$t%
'# 5echa$ica- tra$%-ati'$a- %+%te5.
7orce!voltage e Celocity v!current i
-isplacement x!charge 7rictional coeff !0esistance 0
:ass :! )nductance 8 Stiffness =!)nverse of capacitance "9+
"$. ?rite the a$a-'g'% e-ectrica- e-e5e$t% i$ #'rce crre$t a$a-'g+ #'r the e-e5e$t%
'# 5echa$ica- tra$%-ati'$a- %+%te5.
7orce!current ) Celocity v!voltage v
-isplacement x!fluxN 7rictional coeff !conductance
"90 :ass :! capacitance + Stiffness =!)nverseof inductance "98
"%. ?rite the #'rce a-a$ce eDati'$ 'h5 idea- 5a%% e-e5e$t.
7 : d$x 9dt$
"'. ?rite the #'rce a-a$ce eDati'$ '# idea- da%h)'t e-e5e$t.
7 dx 9dt
"(. ?rite the #'rce a-a$ce eDati'$ '# idea- %)ri$g e-e5e$t.
7 =x Great efforts are needed to design a stable system"D. ?hat i% %er*'5echa$i%5
#he servomechanism is a feedback control system in which the output is
mechanical position Oor time derivatives of position velocityP

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 10/41
"B. ?hat i% %er*'5't'r
#he motors used in automatic control systems or in servomechanism are
called servomotors. #hey are used to convert electrical signal into angular motion.
"F. ?hat i% %+$chr'
/ synchro is a device used to convert an angular motion to an electrical signal or vice
versa.
"?. ?hat i% %+%te5
5hen a number of elements or components are connected in a seuence to
perform a specific function, the group thus formed is called a system.
$<. ?hat are the 5a2'r t+)e% '# c'$tr'- %+%te5
i.open loop system
ii closed loop system
$". e#i$e ther5a- re%i%ta$ce.
#he thermal resistance for heat transfer between two substances is defined as the ratio
of change in temperature and change in heat flow rate.
$$. i%ti$gi%h etwee$ ')e$ -'') a$d c-'%ed -'') %+%te5.
O)e$ -'') %+%te5 C-'%ed -'') %+%te5
)n accurate and un reliable /ccurate and reliableSimple and economical +omplex and costlier #he changes in output due to
external disturbance are not
#he changes in output due to external
disturbances are corrected
Stable system Qnstable system
$%. ?hat i% -'c diagra5 ?hat are the a%ic c'5)'$e$t% '# -'c diagra5
/ block diagram of a system is a pictorial representation of the functions performed
by each component of the system and shows the flow of signals. #he basic elements of
block diagram are block, branch point, summing point.
!. ?hat i% 5athe5atica- 5'de- '# a %+%te5
7athe5atica- 5'de-i$g of any control system is the process or technique to express the
system by a set of mathematical equations.

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 11/41
!4. ?hat d' +' 5ea$t + %e$%iti*it+ '# the c'$tr'- %+%te5
#he parameters of control system are always changing with change in surrounding
conditions, internal disturbance or any other parameters. #his change can be expressed in
terms of sensitivity. /ny control system should be insensitive to such parameters but
sensitive to input signals only.
!3. ?hat i% c'$tr'- %+%te5
/ c'$tr'- %+%te5 is a system of devices or set of devices, that manages, commands, directs
or regulates the behavior of other deviceOsP or systemOsP to achieve desire results.
!J. ?hat i% -i$ear %+%te5
Li$ear c'$tr'- %+%te5% are those t+)e% '# c'$tr'- %+%te5% which follow the principle of
homogeneity and additivity.
!". ?h+ $egati*e #eedac i% )re#erred i$ c'$tr'- %+%te5%
#he negative feedback results in better stability in steady state and rejects any disturbance
signals.
!9. ?hat are the di##ere$ce% etwee$ %+$chr' tra$%5itter a$d c'$tr'--ed tra$%#'r5er
Sl.2o Synchro transmitter +ontrolled transformer
" #he rotor of transmitter is of
dumb bell shape
#he rotor of control transmitter
is cylindrical.$ #he rotor winding of transmitter
is excited by an /+ voltage.
#he induced emf in the rotor is
used as an output signal.
0. ?hat i% N-- )'%iti'$ i$ S+$chr'
#he 2ull position in Synchro control transmitter in a servo system is that position of its
rotor for which the output voltage on the rotor winding is zero, with the transmitter in its
electrical zero position.

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 12/41
= A R , H B
1. 5rite the differential euations governing the :echanical system shown in fig
".".and determine the transfer function.
!. -etermine the transfer function R$OSP97OSP of the system shown in fig. O"DP
. 5rite the differential euations governing the :echanical rotational system shown in
fig. -raw the #orue!voltage and #orue!current electrical analogous circuits. O"DP
7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 13/41
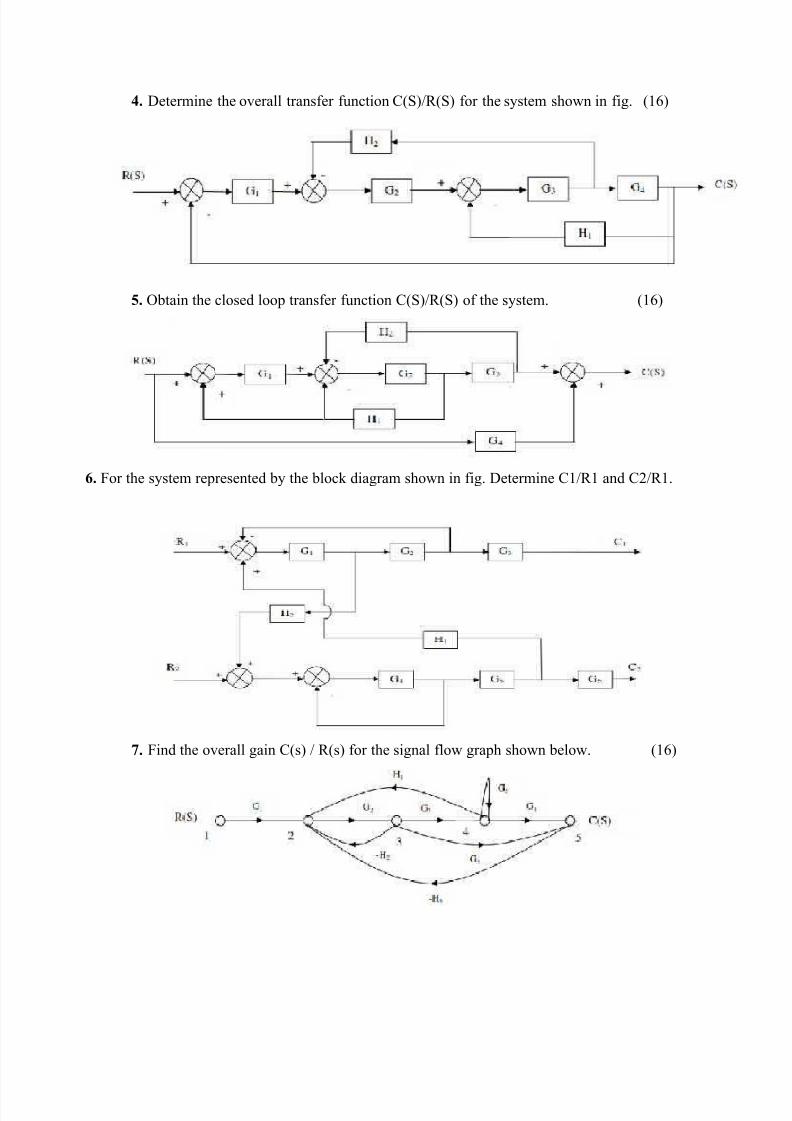
. -etermine the overall transfer function +OSP90OSP for the system shown in fig. O"DP
4. 6btain the closed loop transfer function +OSP90OSP of the system. O"DP
3. 7or the system represented by the block diagram shown in fig. -etermine +"90" and +$90".
J. 7ind the overall gain +OsP 9 0OsP for the signal flow graph shown below. O"DP

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 14/41
". 7ind the overall gain of the system whose signal flow graph is shown in O"DP
11. OiP -erive the transfer function for /rmature controlled -+ motor. OFPOiiP-erive the transfer function for 7ield controlled -+ motor. OFP
1!. OiPExplain -+ servo motor. ODPOiiPExplain the working of /+ servomotor in control systems. O"<P
9. -raw a signal flow graph and evaluate the closed loop transfer function of a system
whose block is shown in fig. O"DP
10. 5rite the differential euations governing the mechanical systems shown below.-raw the force!voltage and force!current electrical analogous circuits and verify bywriting mesh and node euations. O"DP

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 15/41
NI II H I7E RES=ONSE
?O 7ARS
1. ?hat are the 5ai$ ad*a$tage% '# ge$era-iKed err'r c'He##icie$t
iP Steady state is function of time.iiP Steady state can be determined from any type of input
!. ?hat are the e##ect% '# addi$g a Ker' t' a %+%te5
/dding a zero to a system results in pronounced early peak to system response thereby the
peak overshoot increases appreciably.
. StateH7ag$itde criteri'$.
#he magnitude criterion states that ssa will be a point on root locus if for that value of s,
-OsP GOsP 1OsP ". State 8 A$g-e criteri'$.
#he /ngle criterion states that ssa will be a point on root locus for that value of s,
N-OsP NGOsP 1OsP odd multiple of "F<T
4. ?hat i% a d'5i$a$t )'-e
#he dominant pole is a pair of complex conjugate pair which decides the transient response of
the system.
3. Na5e the te%t %ig$a-% %ed i$ c'$tr'- %+%te5
#he commonly used test input signals in control system are impulse step ramp
acceleration and sinusoidal signals.
J. e#i$e BIBO %tai-it+.
/ linear relaxed system is said to have ))6 stability if every bounded input results in a
bounded output.
". ?hat i% the $ece%%ar+ c'$diti'$ #'r %tai-it+
#he necessary condition for stability is that all the coefficients of the characteristic polynomial be positive.
9. ?hat i% the $ece%%ar+ a$d %##icie$t c'$diti'$ #'r %tai-it+
#he necessary and sufficient condition for stability is that all of the elements in the first
column of the routh array should be positive.
7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 16/41
10. ?hat i% Dadra$t %+55etr+
#he symmetry of roots with respect to both real and imaginary axis called uadrant
symmetry. 7or a bounded input signal if the output has constant amplitude oscillations then
the system may be stable or unstable under some limited constraints such a system is called
limitedly stable system.
11. ?hat i% %tead+ %tate err'r
#he steady state error is the value of error signal eOtP when t tends to infinity.
1!. ?hat are %tatic err'r c'$%ta$t%
#he =p =v and =a are called static error constants.
1. ?hat i% the di%ad*a$tage i$ )r')'rti'$a- c'$tr'--er
#he disadvantage in proportional controller is that it produces a constant steady state error.1. ?hat i% the e##ect '# = c'$tr'--er '$ %+%te5 )er#'r5a$ce
#he effect of - controller is to increase the damping ratio of the system and so the peak
overshoot is reduced.
14. ?h+ deri*ati*e c'$tr'--er i% $'t %ed i$ c'$tr'- %+%te5
#he derivative controller produces a control action based on rare of change of error signal and
it does not produce corrective measures for any constant error. 1ence derivative controller is
not used in control system13. ?hat i% the e##ect '# =I c'$tr'--er '$ the %+%te5 )er#'r5a$ce
#he ) controller increases the order of the system by one, which results in reducing the
steady state error .ut the system becomes less stable than the original system.
1J. ?hat i% a$ 'rder '# a %+%te5
#he order of a system is the order of the differential euation governing the system. #he order
of the system can be obtained from the transfer function of the given system.
1". e#i$e a5)i$g rati'.
-amping ratio is defined as the ratio of actual damping to critical damping.
19. Li%t the ti5e d'5ai$ %)eci#icati'$%.
#he time domain specifications are i.-elay time ii.0ise time iii.eak time iv.eak
overshoot

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 17/41
!0. e#i$e e-a+ ti5e.
#he time taken for response to reach (<U of final value for the very first time is called delay
time.
!1. e#i$e Ri%e ti5e.
#he time taken for response to rise from <U to "<<U for the very first time is rise time.
!!. e#i$e )ea ti5e.
#he time taken for the response to reach the peak value for the first time is peak time.
!. e#i$e )ea '*er%h''t.
eak overshoot is defined as the ratio of maximum peak value measured from the
:aximum value to final value
!. e#i$e Sett-i$g ti5e.
Settling time is defined as the time taken by the response to reach and stay within specified
error
!4. ?hat i% the $eed #'r a c'$tr'--er
#he controller is provided to modify the error signal for better control /ction
!3. ?hat are the di##ere$t t+)e% '# c'$tr'--er%
roportional controller ) controller
- controller )- controller !J. ?hat i% )r')'rti'$a- c'$tr'--er
)t is device that produces a control signal which is proportional to the input error signal.
!". ?hat i% = c'$tr'--er
- controller is a proportional plus derivative controller which produces an output signal
consisting of two times !one proportional to error signal and other proportional to the
derivative of the signal.
!9. ?hat i% the %ig$i#ica$ce '# i$tegra- c'$tr'--er a$d deri*ati*e c'$tr'--er i$ a =I9
c'$tr'--er
#he proportional controller stabilizes the gain but produces a steady state error. #he integral
control reduces or eliminates the steady state error.

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 18/41
0. ?h+ deri*ati*e c'$tr'--er i% $'t %ed i$ c'$tr'- %+%te5%.
#he derivative controller produces a control action based on the rate of change of error signal
and it does not produce corrective measures for any constant error.
1. e#i$e Stead+ %tate err'r.
#he steady state error is defined as the value of error as time tends to infinity.
!. ?hat i% the drawac '# %tatic c'e##icie$t%
#he main draw back of static coefficient is that it does not show the variation of error with
time and input should be standard input.
. ?hat i% %te) %ig$a-
#he step signal is a signal whose value changes from zero to / at t < and remains constant at
/ for tV<.
. ?hat i% ra5) %ig$a-
#he ramp signal is a signal whose value increases linearly with time from an initial value of
zero at t<.the ramp signal resembles constant velocity.
4. ?hat i% a )ara'-ic %ig$a-
#he parabolic signal is a signal whose value varies as a suare of time from an initial value of
zero at t<.#his parabolic signal represents constant acceleration input to the signal.
3. ?hat are the three c'$%ta$t% a%%'ciated with a %tead+ %tate err'r.ositional error constant, Celocity error constant /cceleration error constant.
J. ?hat are r''t -'ci
#he path taken by the roots of the open loop transfer function when the loop gain is
varied from < to W is called root loci.
%F. ?hat are the 5ai$ %ig$i#ica$ce% '# r''t -'c%.
i. #he main root locus techniue is used for stability analysis.
ii. Qsing root locus techniue the range of values of =, for as table system can be
determined

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 19/41
= A R B
1. (aP -erive the expressions X draw the response of first order system for unit step input. OFP
ObP -raw the response of second order system for critically damped case and when input
is
unit step. OFP
!. -erive the expressions for 0ise time, eak time, eak overshoot, delay timeO"DP
. / positional control system with velocity feedback is shown in fig. 5hat is the response of
the system for unit step input. O"DP
. OiP :easurements conducted on a Servomechanism show the system response to be
cOtP"L<.$ Y!D<t !".$ Y &"< t. when subjected to a unit step. 6btain an expression for closed
loop transfer function. OFP
4. OiP / unity feedback control system has an open loop transfer function GOSP "<9SOSL$P.7indthe rise time, percentage over shoot, peak time and settling time. OFP
OiiP / closed loop servo is represented by the differential euation d$c9dt$ LF dc9dt D' e
5here c is the displacement of the output shaft r is the displacement of the input shaft and e
r!c. -etermine undamped natural freuency, damping ratio and percentage maximum
overshoot for unit step input. OFP
3. 7or a unity feedback control system the open loop transfer function GOSP "<OSL$P9 S$
OSL"P.7ind OaP position, velocity and acceleration error constants.
ObPthe steady state error when the input is 0OSP where 0OSP %9S &$9S$
L"9%S%
O"DP
J. #he open loop transfer function of a servo system with unity feedback system is GOSP "<9
SO<."SL"P. Evaluate the static error constants of the system. 6btain the steady sta0te
e1rror 2of the system when subjected to an input given olynomial rOtP a La t La 9$ t$ O"DP.
7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 20/41
". #he unity feedback system is characterized by an open loop transfer function is GOSP
= 9 SOSL"<P.-etermine the gain = ,so that the system will have a damping ratio of <.(.7or
this value of =, determine settling time, eak overshoot and time to eak overshoot for a
unit! step input. O"DP
9. OiP 7or a servomechanisms with open loop transfer functionOSP"<9OSL$POSL%P.5hat type
of input signal gives constant steady state error and calculate its value. OFP
OiiP 7ind the static error coefficients for a system whose GOSP1OSP"<9 SO"LSPO"L$SPand
also find the steady state error for rOtP"L t L t$9$. OFP
10. OiP 6btain the response of unity feedback system whose open loop transfer function is
GOSP ' 9 S OSL(P and 5hen the input is unit step.OFP
OiiP / unity feedback system has an amplifier with gain = /"< and gain ratio GOSP " 9
S OSL$P in the feed forward ath ./ derivative feedback ,1OSPS = 6 is introduced as a
minor loop around GOSP.-etermine the derivative feedback constant ,= 6 ,so that the
system damping factor is <.D OFP
11. OiP Explain ,),)-,- controllers OFP
OiiP -erive the expressions for second order system for under damped case and when the
input is unit step.
1!. / unity feedback control system has an open loop transfer functionGOSP = OSL?P 9 S OS$L'SL""P.Sketch the root locus. O"DP
1. Sketch the root locus of the system whose open loop transfer function is
GOSP = 9 S OSL'P OS$L'SL$<P. O"DP
1. / Qnity feedback control system has an open loop transfer function
GOSP = OSL".(P 9 S OSL"POSL(P.Sketch the root locus. O"DP

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 21/41
NI III H >R/ENC6 RES=ONSE
?O 7AR0S
1. ?hat i% #reDe$c+ re%)'$%e
/ freuency responses the steady state response of a system when the input to the systemis a sinusoidal signal.
!. ?hat are #reDe$c+ d'5ai$ %)eci#icati'$%
". 0esonant peak '. +ut!off rate
$. 0esonant freuency (. Gain margin
%. andwidth D. hase margin.
. ?hat i% B'de )-'t
#he ode plot is the freuency response plot of the transfer function of a system. )t
consists of two plots!magnitude plot and phase plot. #he magnitude plot is a graph between
magnitude of a system transfer function in db and the freuency Zc . #he phase plot is a graph
between the phase or argument of a system transfer function in degrees and the freuency Z c .
Qsually, both the plots are plotted on a common x!axis in which the freuencies are expressed inlogarithmic scale.
. ?hat i% a))r'i5ate 'de )-'t
)n approximate bode plot, the magnitude plot of first and second order factors are
approximated by two straight lines, which are asymptotes to exact plot. 6ne straight line is at
<db, for the freuency range < to Zc and the other straight line is drawn with a slope of [ $<n
db9dec for the freuency range Zc to Z. 1ere Zc is the corner freuency.
4. ?hat are ad*a$tage% '# B'de )-'t
". #he magnitudes are expressed in db and so a simple procedure is to add magnitude of each
term one by one.

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 22/41
$. #he approximate bode plot can be uickly sketched, and the c\ can be made at corner
freuencies to get the exact plot.
%. #he freuency domain specifications can be easily determined.
'. #he bode plot can be used to analyze both open loop and ck system.
3. ?hat i% the *a-e '# err'r i$ the a))r'i5ate 5ag$itde )-'t '# a #t #act'r at the c'r$er
#reDe$c+
#he error in the approximate magnitude plot of a first order factor at t freuency is[
%mdb, where m is multiplicity factor. ositive error for r factor and negative error for
denominator factor.
J. ?hat i% the *a-e '# err'r i$ the a))r'i5ate 5ag$itde )-'t '# a i #act'r with M- at
the c'r$er #reDe$c+
#he error is [ Ddb, for the uadratic factor with Zl. ositive error for i factorand
negative error for denominator factor.
". e#i$e )ha%e 5argi$.
#he phase margin, is the amount of additional phase lag at the gain cross & over freuency, Zgc
reuired to bring the system to the verge of instability. )t is given by, "F<T L Φ gc, where Φ gc is
the phase of GOjZP at the gain cross over freuency
hase margin, γ = "F<° L Φgc
5her e, Φ gc = /rg J G Ojω PKS
ω
ω gc
9. e#i$e gai$ 5argi$.
#he gain margin, = g is defined as the reciprocal of the magnitude of open loop
transfer function, at phase cross & over freuency, Z pc

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 23/41
"Gain margin, = g
GOP jω ω =ω
pc
5hen expressed in decibels, it is given by, the negative of db magnitude of GO jZ P at phase cross over freuency.
"Gain margin in db $< log GOP j
ω ω =ω
pc
! $< log GOjZP Z Z pc
10.?rite the e)re%%i'$ #'r re%'$a$t )ea a$d re%'$a$t #reDe$c+
#he expression for resonant peak and resonant freuency are
0esonant eak, :r $ζ
"
" − ζ $
G" OP s = pL K
i L = S S
d $0esonant freuency,
K S $ L = S L =
ω r
ω n " − $ζ
d p i
S
11. e#i$e gai$ cr'%% '*er #reDe$c+.
#he gain cross over freuency ω gc is the freuency at which the magnitude of the open
loop transfer function is unity..
1!. e#i$e )ha%e cr'%% '*er #reDe$c+.
#he freuency at which, the phase of open loop transfer functions is called phase cross
over freuency ω pc.
1. e#i$e C'r$er #reDe$c+
#he magnitude plot can be approximated by asymptotic straight lines. #he freuencies
corresponding to the meeting point of asymptotes are called corner freuency. #he slope of the
magnitude plot changes at every corner freuencies.

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 24/41
14. e#i$e 8re%'$a$t =ea
#he maximum value of the magnitude of closed loop transfer function is called resonant
peak.
14. e#i$e 8Re%'$a$t #reDe$c+.
#he freuency at which resonant peak occurs is called resonant freuency.
13. ?hat i% a$dwidth
#he bandwidth is the range of freuencies for which the system gain )s more than %
db.#he bandwidth is a measure of the ability of a feedback system to reproduce the input
signal ,noise rejection characteristics and rise time.
1J. e#i$e CtH'## rate
#he slope of the log!magnitude curve near the cut!off is called cut!off rate. #he cut!off
rate indicates the ability to distinguish the signal from noise.
1". ?hat are 7 a$d N circ-e%
#he magnitude, : of closed loop transfer function with unity feedback will be in the
form of circle in complex plane for each constant value of :. #he family of these circles arecalled : circles.
8et 2 tan Z where a is the phase of closed loop transfer function with unity feedback.
7or each constant value of 2, a circle can be drawn in the complex plane. #he family of these
circles are called 2 circles.
19.?hat are tw' c'$t'r% '# Nich'-% chart
2ichols chart of : and 2 contours, superimposed on ordinary graph. #he : contours arethe magnitude of closed loop system in decibels and the 2 contours are the phase angle locus of
closed loop system.

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 25/41
!0. ?hat i% Nich'-% chart
#he 2ichols chart consists of : and 2 contours superimposed on ordinary graph. /long
each : contour the magnitude of closed loop system, : will be a constant. /long each 2
contour, the phase N of closed loop system will be constant. #he ordinary graph consists ofmagnitude in db, marked on the y!axis and the phase in degrees marked on x!axis. #he 2ichols
chart is used to find the closed loop freuency response from the open loop freuency response
!1. <'w i% the Re%'$a$t =ea(7r, re%'$a$t #reDe$c+(?r , a$d a$d width deter5i$ed
#r'5 Nich'-% chart
iP #he resonant peak is given by the value of µ.contour which is tangent to GOjω P locus.
iiP #he resonant freuency is given by the freuency of GOjω P at the tangency point.
iiiP #he bandwidth is given by freuency corresponding to the intersection point of GOjω P
and &%d :!contour.
!!. ?hat are the ad*a$tage% '# Nich'-% chart
". )t is used to find closed loop freuency response from open loop freuency response.
$. #he freuency domain specifications can be determined from 2ichols chart.
%. #he gain of the system can be adjusted to satisfy the given specification.
!. ?rite a %h'rt $'te '$ the c'rre-ati'$ etwee$ the ti5e a$d #reDe$c+ re%)'$%e
#here exist a correlation between time and freuency response of first or second order
systems. #he freuency domain specification can be expressed in terms of the time domain
parameters N, and N . 7or a peak overshoot in time domain there is a corresponding resonant peak
in freuency domain. 7or higher order systems there is no explicit correlation between time and
freuency response. ut if there is a pair of dominant complex conjugate poles, then the system
can be approximated to second order system and the correlation between time and freuency
response can be estimated.
!. <'w c-'%ed -'') #reDe$c+ re%)'$%e i% deter5i$ed #r'5 ')e$ -'') #reDe$c+ re%)'$%e
%i$g 7 a$d Ncirc-e%
#he GOj ZP locus or the polar plot of open loop system is sketched on the standard : and
2 circles chart. #he meeting point of : circle with GOj ZP locus gives the magnitude of closed

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 26/41
loop system, Othe freuency being same as that of open loop systemP. #he meeting point of GOj
ZP locus with 2!circle gives the value of phase of closed loop system, Othe freuency being same
as that of open loop systemP.
!4. ?hat i% )'-ar )-'t
#he polar plot of a sinusoidal transfer function GOj ZP is a plot of the magnitude of GOj ZP
versus the phase angle9argument of GOj ZP on polar or rectangular coordinates as N is varied
from zero to infinity.
!3. ?hat i% 5i$i55 )ha%e %+%te5
#he minimum phase systems are systems with minimum phase transfer functions. )n
minimum phase transfer functions, all poles and zeros will lie on the left half of s!plane.
!J. ?hat i% A--H=a%% %+%te5%
#he all pass systems are systems with all pass transfer functions. )n all pass transfer
functions, the magnitude is unity at all freuencies and the transfer function will have anti!
symmetric pole zero pattern Oi.e., for every pole in the left half s!plane, there is a zero in the
mirror image position with respect to imaginary axisP.
$F. ?hat are the ad*a$tage% i$ #reDe$c+ d'5ai$ de%ig$
#he advantages in freuency domain design ar e
". #he effect of disturbances, sensor noise and plant uncertainties are easy to visualizeand accesses in freuency domain.
$. #he experimental information can be used for design purposes.
$?. ?hat i% a Nich'-% )-'t
#he 2ichols plot is a freuency response plot of the open loop transfer function of a
system. )t is a graph between magnitude of GOj ZP in db and the phase of GOj ZP in degree,
plotted on a ordinary graph sheet.
%<. <'w the c-'%ed -'') #reDe$c+ re%)'$%e i% deter5i$ed #r'5 the ')e$ -'') #reDe$c+
re%)'$%e %i$g Nich'-% chart
#he GOj ZP locus or the 2ichols plot is sketched on the standard 2ichols chart. #he
meeting point of : contour with GOj ZP locus gives the magnitude of closed loop system and the
meeting point with 2 circle gives the argument9phase of the closed loop system.

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 27/41
=A R B
1. lot the ode diagram for the following transfer function and obtain the gain and phase cross
over freuencies. GOSP "<9 SO"L<.'SP O"L<."SP O"DP
!. #he open loop transfer function of a unity feed back system is GOSP "9 SO"LSP O"L$SP.
Sketch the olar plot and determine the Gain margin and hase margin. O"DP
. Sketch the ode plot and hence find Gain cross over freuency ,hase cross over
freuency, Gain margin and hase margin.
GOSP <.B(O"L<.$SP9 SO"L<.(SP O"L<."SP O"DP
. Sketch the ode plot and hence find Gain cross over freuency, hase cross over
freuency, Gain margin and hase margin.
GOSP "<OSL%P9 SOSL$P OS$L'SL"<<P O"DP4. Sketch the polar plot for the following transfer function .and find Gain cross over
freuency ,hase cross over freuency, Gain margin and hase margin.
GOSP "<OSL$POSL'P9 S OS$ !%SL"<P O"DP
3. +onstruct the polar plot for the function G1OSP $OSL"P9 S$. find Gain cross over
freuency ,hase cross over freuency, Gain margin and hase margin. O"DP
J. lot the ode diagram for the following transfer function and obtain the gain and phase
cross over freuencies GOSP =S$ 9 O"L<.$SP O"L<.<$SP.-etermine the value of = for again cross over freuency of $< rad9sec. O"DP
". Sketch the polar plot for the following transfer function .and find Gain cross over
freuency, hase cross over freuency, Gain margin and hase margin.
GOSP '<<9 S OSL$POSL"<P O"DP
9. / unity feed back system has open loop transfer function GOSP $<9 S OSL$POSL(P.Qsing
2ichol*s chart. -etermine the closed loop freuency response and estimate all the freuency
domain specifications. O"DP
10. Sketch the ode plot and hence find Gain cross over freuency, hase cross over
freuency, Gain margin and hase margin.
GOSP "<O"L<."SP9 SO"L<.<"SP O"LSP. O"DP
7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 28/41
NI I; H SABILI6 AN CO7=ENSAOR
ESIGN ?O 7ARS
1. ?hat are the e##ect% '# addi$g a Ker' t' a %+%te5
/dding a zero to a system increases peak overshoot appreciably.
!. e#i$e Re-ati*e %tai-it+
0elative stability is the degree of closeness of the system, it is an indication of
strength or degree of stability.
. ?hat i% )ha%e 5argi$
#he phase margin is the amount of phase lag at the gain cross over freuency reuired
to bring system to the verge of instability.
. e#i$e Gai$ cr'%% '*er
#he gain cross over freuency is the freuency at which the magnitude of the open
loop transfer function is unity.
4. ?hat i% B'de )-'t
#he ode plot is the freuency response plot of the transfer function of a system. /
ode plot consists of two graphs. 6ne is the plot of magnitude of sinusoidal transfer
function versus log Z.#he other is a plot of the phase angle of a sinusoidal function versus
logZ.
3. ?hat are the 5ai$ ad*a$tage% '# B'de )-'t
#he main advantages are\
iP :ultiplication of magnitude can be in to addition.
iiP / simple method for sketching an approximate log curve is available.
iiiP )t is based on asymptotic approximation. Such approximation is sufficient if
rough information on the freuency response characteristic is needed.
ivP #he phase angle curves can be easily drawn if a template for the phase angle
curves of "L j Z is available.
J. e#i$e C'r$er #reDe$c+
#he freuency at which the two asymptotic meet in a magnitude plot is called corner
freuency.
7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 29/41
". ?hat i% a$dwidth
#he bandwidth is the range of freuencies for which the system gain is more than %
db. #he bandwidth is a measure of the ability of a feedback system to reproduce the input
signal, noise rejection characteristics and rise time.
9. e#i$e CtH'## rate
#he slope of the log!magnitude curve near the cut!off is called cut!off rate. #he cut!
off rate indicates the ability to distinguish the signal from noise.
"<. ?hat are the ti5e d'5ai$ %)eci#icati'$% $eeded t' de%ig$ a c'$tr'- %+%te5
". 0ise time, tr $. eak overshoot , :p %. Setting time, ts '.-amping ratio
(. 2atural freuency of oscillation, Nn
11. ?rite the $ece%%ar+ #reDe$c+ d'5ai$ %)eci#icati'$ #'r de%ig$ '# a c'$tr'- %+%te5.
". hase margin $. Gain margin %. 0esonant peak '. andwidth
1!. ?hat i% c'5)e$%ati'$
#he compensation is the design procedure in which the system behavior is altered to
meet the desired specifications by introducing additional device called compensator.
"%. ?hat i% a c'5)e$%at'r
/ device inserted in to the system for the purpose of satisfying the specifications is
called compensator.
1. ?hat are the di##ere$t t+)e% '# c'5)e$%at'r
". 8ag compensator
$. 8ead compensator
%. 8ag & lead compensator.
"(. ?he$ -ag : -ead : -ag 8 -ead c'5)e$%at'r i% e5)-'+ed
#he lag compensator is employed for a stable system for improvement in steady state
performance.
#he lead compensation is employed for stable 9 unstable system for improvement in
transient & state performance.
#he lag & lead compensation is employed for stable 9 unstable system for
improvement in both steady state and transient state performance.

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 30/41
13. e#i$e =ha%e -ag a$d )ha%e -ead
/ negative phase angle is called phase lag.
/ positive phase angle is called phase lead.
1J. ?hat are the tw' t+)e% '# c'5)e$%ati'$ %che5e%
i. +ascade or series compensation
ii. 7eedback compensation or parallel compensation
1". ?hat i% %erie% c'5)e$%ati'$
#he series compensation is a design procedure in which a compensator is introduced in
series with plant to alter the system behaviour and to provide satisfactory performance Oi.e., to
meet the desired specificationsP.
Gc OsP #ransfer function of series compensator
G OsP 6pen loop transfer function of the plant
1 OsP 7eedback path transfer function.
19. ?hat i% #eedac c'5)e$%ati'$
#he feedback compensation is a design procedure in which a compensator is introduced
in the feedback path so as to meet the desired specifications. )t is also called parallel
compensation.
Gc OsP #ransfer function of series compensator,G" OsP G$ OsP 6pen loop transfer function of
the plant 1 OsP 7eedback path transfer function.
!0. ?hat are the #act'r% t' e c'$%idered #'r ch''%i$g %erie% 'r %h$t:#eedac
c'5)e$%ati'$
#he choice between series, shunt or feedback compensation depends on the following\
2ature of signals in the systems. ower levels at various points. +omponents available.
-esigner*s experience. Economic considerations.
!1. ?h+ c'5)e$%ati'$ i% $ece%%ar+ i$ #eedac c'$tr'- %+%te5
)n feedback control systems compensation is reuired in the following situations. 5hen
the system is absolutely unstable, then compensation is reuired to stabilize the system and also
to meet the desired performance. 5hen the system is stable, compensation is provided to obtain
the desired performance.

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 31/41
!!. i%c%% the e##ect '# addi$g a )'-e t' ')e$ -'') tra$%#er #$cti'$ '# a %+%te5.
#he addition of a pole to open loop transfer function of a system will reduce the steady
state error. #he closer the pole to origin lesser will be the steady!state error. #hus the steady!
state performance of the system is improved. /lso the addition of pole will increase the order of
the system, which in turn makes the system less stable than the original system.
!. i%c%% the e##ect '# addi$g a Ker' t' ')e$ -'') tra$%#er #$cti'$ '# a %+%te5.
#he addition of a zero to open loop transfer function of a system will improve the
transient response. #he addition of zero reduces the rise time. )f the zero is introduced close to
origin then the peak overshoot will be larger. )f the zero is introduced far
/way from the origin in the left half of s!plane then the effect of zero on the transient response
will be negligible.
!. ?hat are the ad*a$tage% a$d di%ad*a$tage% i$ #reDe$c+ d'5ai$ de%ig$
#he effect of disturbances, sensor noise and plant uncertainties are easy to visualize and
asses in freuency domain. #he experimental information can be used for design purposes.
#he disadvantages of freuency response design are that it gives the information on
closed loop system*s transient response indirectly.
!4. ?hat are the %e% '# -ead c'5)e$%at'r
• speeds up the transient response
• increases the margin of stability of a system
• increases the system error constant to a limited extent.
!3. ?hat i% -agHc'5)e$%ati'$
#he lag compensation is a design procedure in which a lag compensator is introduced in
the system so as to meet the desired specifications.
$B. ?hat i% a -ag c'5)e$%at'r Gi*e a$ ea5)-e.
/ compensator having the characteristics of lag network is called lag compensator. )f a
sinusoidal signal is applied to a lag compensator, then in steady state the output will have a phase
lag and lead with respect to input.

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 32/41
!". ?hat are the characteri%tic% '# -ag c'5)e$%ati'$ ?he$ -ag c'5)e$%ati'$ i%
e5)-'+ed
#he lag compensation improves the steady state performance, reduces the bandwidth and
increases the rise time. #he increase in rise time results in slower transient response. )f the zero
in the system does not cancel the pole introduced by the compensator, then lag compensator
increases the order of the system by one.
5hen the given system is stable and does not satisfy the steady!state performance
specifications then lag compensation can be employed so that the system is redesigned to satisfy
the steady!state reuirements.
$?. ?hat i% -ead c'5)e$%ati'$
#he lead compensation is a design procedure in which a lead compensator is introduced
in the system so as to meet the desired specifications.
0. ?hat are the characteri%tic% '# -ead c'5)e$%ati'$ ?he$ -ead c'5)e$%ati'$ i%
e5)-'+ed
#he lead compensation increases the bandwidth and improves the speed of response. )t
also reduces the peak overshoot. )f the pole introduced by the compensator is not cancelled by
the zero in the system, then lead compensation increases the order of the system by one. 5hen
the given system is stable9 unstable and reuires improvement in transient state response then
lead compensation is employed.

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 33/41
= A R B
". OiP Qsing 0outh criterion determine the stability of the system whose characteristics
euation is S'LFS%L"FS$L"DSL( <. OFP
OiiP.7OSP SD LS(!$S'!%S%!BS$!'S!' <.7ind the number of roots falling in the 01S
plane and 81S plane. OFP
$. / unity feedback control system has an open loop transfer function
GOSP = 9 S OS$L'SL"%P.Sketch the root locus. O"DP
%. -raw the 2yuist plot for the system whose open loop transfer function is
GOSP= 9 S OSL$POSL"<P. -etermine the range of k for which closed loop system is
stable. O"DP
'. Sketch the 2yuist lot for a system with the open loop transfer functionGOSP 1OSP = O"L<.(SPO"LSP 9 O"L"<SPOS!"P. -etermine the range of k for which closed
loop system is stable. O"DP
(. OiP -etermine the range of = for stability of unity feedback system whose open loop
transfer function is GOsP = 9 s OsL"POsL$P OFP
OiiP #he open loop transfer function of a unity feed back system is given by
GOsP = OsL"P 9 s%Las$L$sL". -etermine the value of = and a so that the system
oscillates at a freuency of $ rad9sec. OFP
D. (iP +onstruct 0outh array and determine the stability of the system represented by the
characteristics euation S(LS'L$S%L$S$L%SL(<.+omment on the location of the roots
of characteristic euation. OFP
OiiP +onstruct 0outh array and determine the stability of the system represented by the
characteristics euation SBL?SDL$'S'L$'S%L$'S$L$%SL"(<comment on the location
of the roots of characteristic euation.
B. 5hat is compensation] 5hy it is need for control system] Explain the types of
compensation] 5hat is an importance of compensation] O"DP
F. 0ealise the basic compensators using electrical network and obtain the transfer
function. O"DP
?. -esign suitable lead compensators for a system unity feedback and having open loop
transfer function GOSP =9 SOSL"P to meet the specifications.OiP #he phase margin of the
7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 34/41
system ^ '(_, OiiP Steady state error for a unit ramp input `"9"(, OiiiP #he gain cross over
freuency of the system must be less than B.( rad9sec. O"DP
"<. / unity feed back system has an open loop transfer function GOSP =9 SOSL"P O<.$SL"P.
-esign a suitable phase lag compensators to achieve following specifications =v F
and hase margin '< deg with usual notation. O"DP
"". Explain the procedure for lead compensation and lag compensation O"DP
"$. Explain the design procedure for lag! lead compensation O"DP
"%. +onsider a type " unity feed back system with an 68#7 GOSP =9S OSL"P OSL'P. #he
system is to be compensated to meet the following specifications =v V (sec and : V '%
deg. -esign suitable lag compensators.
"'. -esign a lead compensator for a unity feedback system with open loop transfer function
GOSP =9 SOSL"P OSL(P to satisfy the following specifications OiP =v V (< OiiP hase:argin is V $< . O"DP
"(. -esign a lead compensator for GOSP = 9 S$ O<.$SL"P to meet the following
Specifications OiP/cceleration ka"<> OiiP .:%(. O"DP
"D. -esign a 8ag compensator for the unity feedback system whose closed loop transfer
function +OsP 9 0OsP = 9 Os OsL'P OsLF<P L =P is to meet the following specifications
.: ^%% _. /nd =v ^%<. O"DP
"B. / unity feedback system has an 68#7 GOsP = 9 sOsL$POsLD<P. -esign a 8ead!8agcompensator is to meet the following specifications.
OiP .: is atleast '<_ , OiiP Steady state error for ramp input ` <.<' rad. O"D

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 35/41
1. e#i$e %tate *aria-e.
NI ; H STATE VARIABLE ANALYSIS
?O 7AR0S
#he state of a dynamical system is a minimal set of variablesOknown as state variablesP such
that the knowledge of these variables at t!t< together with the knowledge of the inputs for t V t< ,
completely determines the behavior of the system for t V t<
!. ?rite the ge$era- #'r5 '# %tate *aria-e 5atri.
#he most general state!space representation of a linear system with m inputs, p outputs and n
state variables is written in the following form\
/ L Q
R + L -Q
5here state vector of order n ".
Q input vector of order n ".
/System matrix of order n n.
)nput matrix of order n m
+ output matrix of order p n
- transmission matrix of order p m
. ?rite the re-ati'$%hi) etwee$ KHd'5ai$ a$d %Hd'5ai$.
/ll the poles lying in the left half of the S!plane, the system is stable in S!domain.+orresponding in !domain all poles lie within the unit circle.
. ?hat are the 5eth'd% a*ai-a-e #'r the %tai-it+ a$a-+%i% '# %a5)-ed data c'$tr'- %+%te5
#he following three methods are available for the stability analysis of sampled data control
system
". uri*s stability test.
$. ilinear transformation.
%. 0oot locus techniue.4. ?hat i% the $ece%%ar+ c'$diti'$ t' e %ati%#ied #'r de%ig$ %i$g %tate #eedac
#he state feedback design reuires arbitrary pole placements to achieve the desire performance.
#he necessary and sufficient condition to be satisfied for arbitrary pole placement is that the system is
completely state controllable.
7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 36/41
3. ?hat i% c'$tr'--ai-it+
/ system is said to be completely state controllable if it is possible to transfer the system state
from any initial state Ot<P at any other desired state OtP, in specified finite time by a control vector
QOtP.
J. ?hat i% '%er*ai-it+
/ system is said to be completely observable if every state OtP can be completely identified by
measurements of the output ROtP over a finite time interval.
". ?rite the )r')ertie% '# %tate tra$%iti'$ 5atri.
#he following are the properties of state transition matrix
". O<P e/x< ) Ounit matrixP.
$. OtP e/t Oe!/tP!" JO!tPK!".
%. Ot"Lt$P e/Ot"Lt$P Ot"P Ot$P Ot$P Ot"P.
9. e#i$e %a5)-i$g the're5.
Sampling theorem states that a band limited continuous time signal with highest freuency f m,
hertz can be uniuely recovered from its samples provided that the sampling rate 7s is greater than or
eual to $f m samples per second.
10. ?hat i% %a5)-ed data c'$tr'- %+%te5
5hen the signal or information at any or some points in a system is in the form of discrete
pulses, then the system is called discrete data system or sampled data system.11. ?hat i% N+Di%t rate
#he Sampling freuency eual to twice the highest freuency of the signal is called as 2yuist
rate. f s$f m
1!. ?hat i% %i5i-arit+ tra$%#'r5ati'$
#he process of transforming a suare matrix A to another similar matrix B by a transformation
=H1
A= M B is called similarity transformation. #he matrix is called transformation matrix.
1. ?hat i% 5ea$t + diag'$a-iKati'$
#he process of converting the system matrix A into a diagonal matrix by a similarity
transformation using the modal matrix 7 is called diagonalization
1. ?hat i% 5'da- 5atri
#he modal matrix is a matrix used to diagonalize the system matrix. )t is also called
diagonalization matrix.

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 37/41
)f / system matrix.
: :odal matrix
/nd :!"inverse of modal matrix.
#hen :!"/: will be a diagonalized system matrix.
14. <'w the 5'da- 5atri i% deter5i$ed
#he modal matrix : can be formed from eigenvectors. 8et m", m$, m% M. mn be the
eigenvectors of the nth order system. 2ow the modal matrix : is obtained by arranging all the
eigenvectors column wise as shown below.
:odal matrix , : Jm", m$, m% M. mnK.
13. ?hat i% the $eed #'r c'$tr'--ai-it+ te%t
#he controllability test is necessary to find the usefulness of a state variable. )f the state
variables are controllable then by controlling Oi.e. varyingP the state variables the desired outputs of thesystem are achieved.
1J. ?hat i% the $eed #'r '%er*ai-it+ te%t
#he observability test is necessary to find whether the state variables are measurable or not. )f
the state variables are measurable then the state of the system can be determined by practical
measurements of the state variables.
1". State the c'$diti'$ #'r c'$tr'--ai-it+ + Gi-ert’% 5eth'd.
Ca%e (i whe$ the eige$ *a-e% are di%ti$ct
+onsider the canonical form of state model shown below which is obtained by using the
transformation :.
L Q
R L -Q
5here, :!"/:> +: , :!" and : :odal matrix.
)n this case the necessary and sufficient condition for complete controllability is that, the matrix
must have no row with all zeros. )f any row of the matrix is zero then the corresponding state
variable is uncontrollable.
Ca%e(ii whe$ eige$ *a-e% ha*e 5-ti)-icit+
)n this case the state modal can be converted to ordan canonical form shown below
L Q

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 38/41
R L -Q 5here, :!"/:
)n this case the system is completely controllable, if the elements of any row of that correspond to
the last row of each ordan block are not all zero.
19. State the c'$diti'$ #'r '%er*ai-it+ + Gi-ert’% 5eth'd.+onsider the transformed canonical or ordan canonical form of the state model shown below
which is obtained by using the transformation, :
L Q
R L -Q O6rP
L Q
R L -Q where +: and :modal matrix.
#he necessary and sufficient condition for complete observability is that none of the columns of the
matrix be zero. )f any of the column is of has all zeros then the corresponding state variable is not
observable.
!0. State the da-it+ etwee$ c'$tr'--ai-it+ a$d '%er*ai-it+.
#he concept of controllability and observability are dual concepts and it is proposed by kalman as
principle of duality.#he principle of duality states that a system is completely state controllable if and
only if its dual system is completely state controllable if and only if its dual system is completely
observable or viceversa.!1. ?hat i% the $eed #'r %tate '%er*er
)n certain systems the state variables may not be available for measurement and feedback. )n
such situations we need to estimate the unmeasurable state variables from the knowledge of input and
output. 1ence a state observer is employed which estimates the state variables from the input and
output of the system. #he estimated state variable can be used for feedback to design the system by
pole placement.
!!. <'w wi-- +' #i$d the tra$%#'r5ati'$ 5atri, =' t' tra$%#'r5 the %tate 5'de- t' '%er*a-e
)ha%e *aria-e #'r5
• +ompute the composite matrix for observability,<
• -etermine the characteristic euation of the system ) !/ <.
• Qsing the coefficients a",a$,M.an!" of characteristic euation form a matrix, 5.
• 2ow the transformation matrix, < is given by <5 <#.

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 39/41
!. ?rite the '%er*a-e )ha%e *aria-e #'r5 '# %tate 5'de-.
#he observable phase variable form of state model is given by the following euations
/< L <u.
R +< L -u
5here, /< , < and +< J < < M.. < " K
!. ?hat i% the )'-e )-ace5e$t + %tate #eedac
#he pole placement by state feedback is a control system design techniue, in which the state
variables are used for feedback to achieve the desired closed loop poles.
!4. <'w c'$tr'- %+%te5 de%ig$ i% carried i$ %tate %)ace
)n state space design of control system, any inner parameter or variable of a system are used for feedback to achieve the desired performance of the system. #he performance of the system is related to
the location of closed loop poles. 1ence in state space design the closed loop poles are placed at the
desired location by means of state feedback through an appropriate state feedback gain matrix, =.
!3. ?hat are the characteri%tic% 'r )r')ert+ that are i$*aria$t $der a %i5i-arit+ tra$%#'r5ati'$
#he determinant, characteristic euation, eigen values and trace of a matrix are invariant under a
similarity transformation.
!J. ?hat are the ad*a$tage% '# c'$tr'- %+%te5 i$ %tate %)ace
". /ny inner parameters or variables of a system can be defined as state variables and can be used
for feedback.
$. #he closed loop poles may be placed at any desired locations by means of state feedback
through an appropriate state feedback gain matrix, =.
!". ?hat i% the $ece%%ar+ c'$diti'$ t' e %ati%#ied #'r de%ig$ '# %tate '%er*er
#he state observer can be designed only if the system is completely state observable.
!9. ?hat i% c'$tr'- Law
)n control system design using state variable feedback , the euation u r ! = is called controllaw. 5here, u )nput to the plant \ r )nput to the system with state feedback
State vector \ = State feedback gain matrix.
0. ?hat i% ca$'$ica- #'r5 '# %tate 5'de-
)f the system matrix, / is in the form of diagonal matrix then the state model is called canonical
form.

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 40/41
=AR,HB
". 7or
+ompute the state transition matrix e/t using +ayley & 1amilton #heorem. O"DP
$. 7or the system shown in the figure below choose C"OtP and C$OtP as state variables and write down the
state euations satisfied by them. ring these euations in the vector matrix form.
0": ohm, + "7 O"DP
%. / feedback system has a closed loop transfer function,
.
+onstruct three different state models for this system and give block diagram representation for each
state model. O"DP
'. / feedback system is characterized by the closed loop transfer function
.
-raw a suitable signal flow graph and therefrom construct a state model of the system. O"DP
(. Given . +ompute e/t. O"DP

7/26/2019 IC6501 - CS 2 MARKS WITH ANSWERS.doc
http://slidepdf.com/reader/full/ic6501-cs-2-marks-with-answersdoc 41/41
D. 7or a system represented by the state euation. . #he response of .
5hen O<P and . 5hen O<P . -etermine the system matrix / and the
state transition matrix. O"DP
B. / 8#) system is described by the following state model. u.
#ransform this state model into canonical state model and therefrom obtain the explicit solution for the
state vector and output when the control force u is a unit step function and initial state vector is
. O"DP
F. 5rite the state euations of the system shown in figure below in which ", $, and % constitute the
state vector. -etermine whether the system is completely controllable and observable. O"DP
?. +onsider a linear system described by the transfer unction ROsP 9 QOsP "< 9 sOsL"POsL$P.-esign a
feedback controller with a state feedback so thst the closed loop poles are !$, !"L j". O"DP
"<. #he system matrix / of a discrete time system is given by / J< "K
J!$ !%K.
+ompute the state transition matrix /= QS)2G +ayley & 1amilton theorem. O"DP