
Groten Talk FH-Aachen shortVersion€¦ · Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen...
26
Mensch-Technik Interaktion Wie wir Produkte mit Hilfe von psychologischem Wissen sinnvoller gestalten und nutzen können Dr. rer. nat. Dipl. Psych. Raphaela Groten
-
Upload
truongnhan -
Category
Documents
-
view
252 -
download
1
Transcript of Groten Talk FH-Aachen shortVersion€¦ · Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen...
Mensch-Technik Interaktion Wie wir Produkte mit Hilfe von psychologischem Wissen sinnvoller
gestalten und nutzen können
Dr. rer. nat. Dipl. Psych. Raphaela Groten

Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen Seite
Psychologie?
„Die Wissenschaft vom Erleben und Verhalten des Menschen“
2

Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen Seite
•Assistenz: Aufgabenverständnis aus Nutzersicht
•Kooperation mit (teil-)autonomen Systemen: Intentionserkennung
•Autonome Aufgabendurchführung: Überwachung
Relevanz der MTI-Szenarien
3
1. Motivation

Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen Seite
Relevanz in „kleinen“ Systemen
4
1. Motivation

Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen Seite
Innovation
Innovation: Prozess der Einführung von Neuem
5
Tim Brown: Change by Design
Bedarf ökonom. Realisierbarkeit
techn. Machbarkeit
2. Motivation

Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen Seite
Innovation
Norman & Verganti 2012: Incremental and radical Innovation: Design Research vs. Technology and Meaning Change
Norman & Verganti 3 March 18, 2012 Incremental and Radical Innovation
blindfolded person trying to reach the top of a hill by feeling the ground in all directions around the current position and then moving to the highest position, repeating until all directions are lower than the current one: this would be the top of the hill.
Figure 1. The hill-climbing paradigm applied to incremental and radical innovation. A given product might start off at “A.” Through Human-Centered Design and Design Research (HCD & DR), the product undergoes a series of incremental innovations, eventually bringing it to its maximum quality for this part of the design space, point “B.” To move to a different hill, one with a higher potential, requires radical innovation, and this comes about through either technology or meaning change, leading to point “C” on a larger hill. Note that the initial outcome is often inferior to that previously reached (“B”), and so HCD and DR are required to make the necessary incremental innovations to reach maximum potential. To make matters more complex, when the product is at point “C,” there is no way of knowing if indeed there is a superior level (“D”) or if this is an inferior spot in the design space.
Although the hill-climbing procedure guarantees continual improvement with eventual termination at the peak of the hill, it has a well-known limit: there is no way to know whether there might be even higher hills in some other part of the design space. Hill-climbing methods get trapped in local maxima. Incremental innovation attempts to reach the highest point on the current hill. Radical innovation seeks the highest hill. The implication for design is clear: because human-centered design is a form of hill climbing, it is only suited for incremental innovation. Norman was bothered by his analysis and tried to find examples that refuted this conclusion: he failed. Every radical innovation he investigated was done without design research, without careful analysis of a person’s or even a society’s needs. The list of such innovations starts out long before design research existed with such technologies as indoor plumbing, electric lighting in homes, the automobile and airplane, radio and television. But even today, radical innovations such as Facebook's and Twitter's development of social networks have come about simply because their inventors thought they were interesting things to try. Videophone calls is an example that has persisted (and is
HC
D
Meaning or Technology Change
HC
D
HC
D
Meaning or Technology Change Change
!"
#"
$"
%"
&'()
*+,"-
*./0,1"
%23045"&.'.62,2'3"
Zusammenspiel zwischen inkrementeller (eher Nutzer) und radikaler Innovation (eher Technologie)
6
2. Motivation

Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen Seite
Innovation
• Neue Technologie alleine reicht nicht für Markterfolg
• Technologie ist so ausgereift, dass Produkt darüber nicht differenziert werden können
7
2. Motivation

Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen Seite
Geringere Entwicklungskosten
8
Vorstudie Konzept Realisierung Einführung Nutzung
Zeit
Entwicklungskosten Nachbearbeitungskosten
Kos
ten
Beeinflussungsmöglichkeiten
Kostenzunahme
3. Motivation

Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen Seite
Psychologie & Produktentwicklung
• Verständnisse des Nutzers im Kontext (Anforderungsanalyse) • Mensch-Technik Interaktion (Gestaltung Schnittstelle) • Produkt-Evaluation (Bewertung)
9

Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen Seite
Stakeholder Analyse Empirische Daten als Überzeugungsmittel
10
Nutzerverständnis im Kontext

Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen Seite 11
Input: Marketing
Nutzer im
Kontext
Nutzerverständnis im Kontext

Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen Seite
Forschung Virtual Reality
A B C
Offset between tracker and palm
Object size as the distance between the palms
A
C
B BA
12
Virtual Bodyownership: Unser Avatar beeinflusst, wie wir wahrnehmen • Bisher: Fokus darauf, wie Zustand hergestellt wird. • Hier: Konsequenzen für Selbst-(Wahrnehmung) untersucht• Proceedings of the National Academy of Science
Nutzer im
Kontext

Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen Seite
Produktentwicklung
• Nutzer bekannt
• Technologie bekannt
• Und die Interaktion?
http://www.i-support-project.eu/the-project/
13
Nutzer im
Kontext

Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen Seite
Mensch Technik Interaktion
Interaction Relationship between two systems that results in reciprocal influence [Vandenbos2007]
CollaborationBoth partners share intentions [Grosz1996, Sebanz2003, Tomasello2005]
Herausforderungen
• dynamisches Umfeld, nicht vorhersagbar • common ground • auf nicht-beobachtbares Verhalten reagieren können • ….
14
2.1 Requirements and Related Work
DatabaseIntentionRecognition
Planner
MotionControl
Sensors Actuators
Human
Figure 2.6: System architecture proposed by Schrempf et al. [2005]
Thus, there are existing models for robots dealing with intention recognition on the basis ofrepresentations of the users. However, for the framework developed here, these models needto be extended towards intention negotiation between partners which may have different actionplans and which have to agree on them. The next section looks into action plans with more detail,namely how actions are chosen to achieve a goal.
2.1.5 Decisions on ActionsDecision making is generally defined as the act of choosing one available option out of severalpossibilities, which have different trade-offs between benefits and costs. Some researchers referto decision as the “forming of intentions before acting” [Hardy-Vall?e, in press], whereas othersdefine the exact time-point as decision, e.g. Hoffman and Yates [2005]. Wickens [2004] definesa decision-making task with the following components:1) “a person must select one option from a number of alternatives”.2) “there is some amount of information available with respect to the option”.3) “the time frame is relatively long”.4) “the choice is associated with uncertainty”.
After a literature overview on existing models of decision making Wickens [2004] develops amodel of the decision making process based on Rasmussen’s model (Rasmussen [1983]). Threelevels of decision making are introduced based on the interpretation of environmental cues andthe resulting action execution (see also Figure 2.7):1) Automatic information processing: In accordance with the skill-based level in Rasmussen[1983], the relation between perception and action does not need higher cognitive considera-tions.2) Intuitive information processing: After the environmental cues are integrated, a rule which is
19
C. Schrempf et al. (2005)

Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen Seite
Anpassung
• “Automated systems still are man-machine systems, for which both technical and human factors are important.... the irony that the more advanced a control system is, so the more crucial may be the contribution of the human operator.“ [L. Bainbridge, 1983]
• „With a person and a machine the requisite common ground does not exist, so it is far better for the machine to behave predictable and let the person respond appropriately.“ [D. Norman, 2007]
15

Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen Seite
Haptische Mensch Roboter Interaktion
16
•Kopplung: direkt Kollaboration oder gemeinsame Objektmanipulation
•Austausch von Kraft und Positionssignalen
•Kontinuierliches Feedback

Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen Seite
<<
<<
? <<<<<<
??<<
<<<<<<<
Gibt es haptische Kooperation?
Integration von Intentionen, hier Positions- und Kraft-Trajektorien
Haptische Mensch Roboter Interaktion
17
Mensch &
Roboter

Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen Seite
V = Vision-only
• Object inertia: 10kg each
• Object position:
Experiment
• Gemeinsame Tracking-
Aufgabe(1DoF)
• 2 Unterschiedliche Feedback
Bedingungen
• Experimentelle Kontrolle derIntentionen (Pfad)
• Experimentelle Kontrolle derKooperation: Angebliche
Belohnung
• 39 participants
ihihivo xxx ,2,1, ==
€
xvo,i =xh1,i + xh2,i
2
VH = Vision & haptic
• Object inertia: 20kg together
• Object position:
Experiment
18
Video Experiment
Mensch &
Roboter
Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen Seite
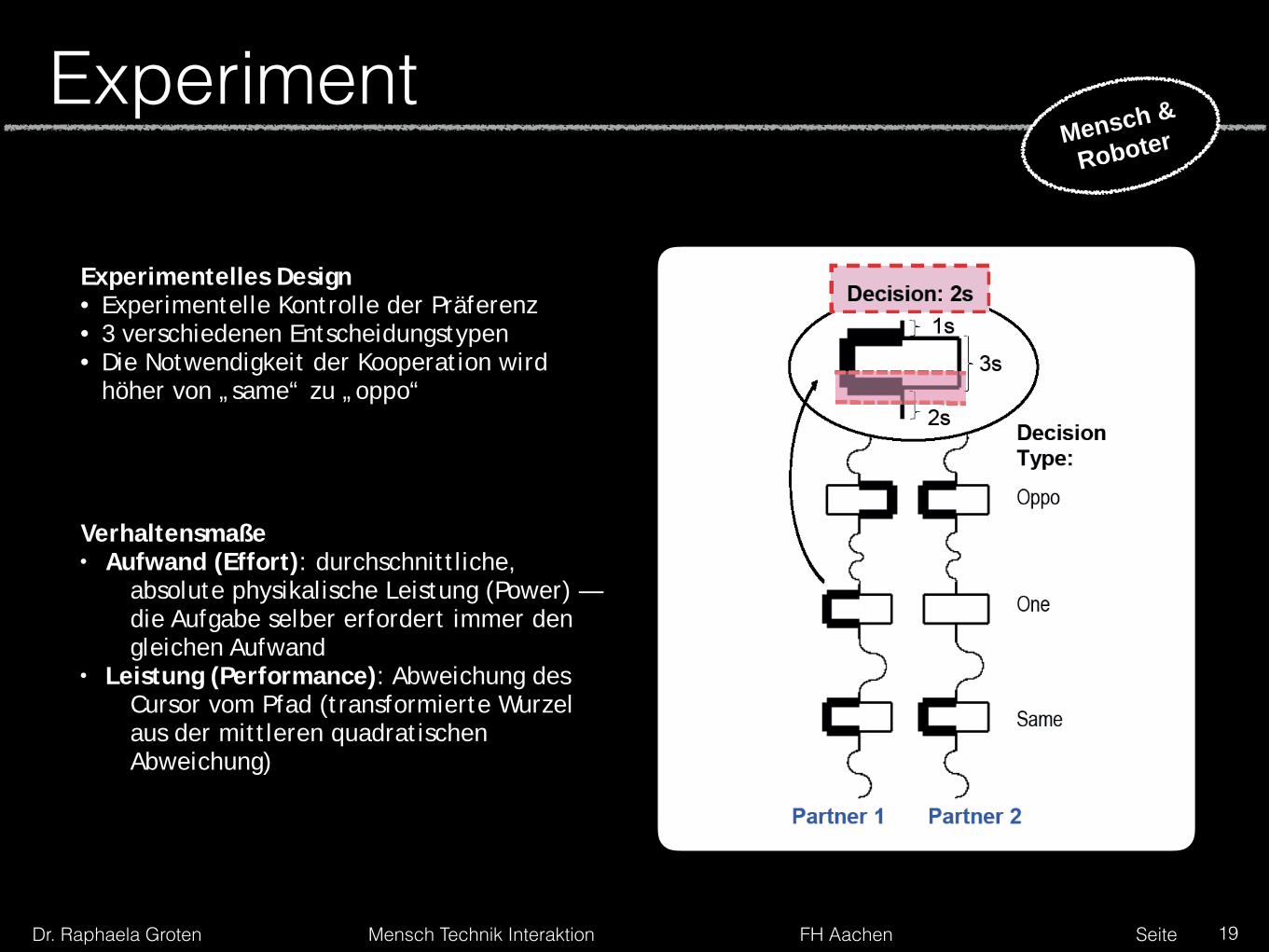
Experimentelles Design• Experimentelle Kontrolle der Präferenz • 3 verschiedenen Entscheidungstypen • Die Notwendigkeit der Kooperation wird
höher von „same“ zu „oppo“
Verhaltensmaße • Aufwand (Effort): durchschnittliche,
absolute physikalische Leistung (Power) —die Aufgabe selber erfordert immer den gleichen Aufwand
• Leistung (Performance): Abweichung des Cursor vom Pfad (transformierte Wurzel aus der mittleren quadratischen Abweichung)
Experiment
19
Mensch &
Roboter

Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen Seite
Interpretation der Verhaltensmaße• Leistung: Fehler —> Probleme bei der Integration, zeigt die Herausforderungen der Aufgabe • Aufwand: physikalische Leistung —> Kosten der Integration
PerformanceEffort
Vision VHaptic
V VH
erhöhter Bedarf Intentionen zu integrieren
Ergebnis
20
erhöhter Bedarf Intentionen zu integrieren
Mensch &
Roboter

Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen Seite 21
• Domineeringness: Consistency across partners for V = 49% and VH = 64% • Dominance:32% in V and 24% in VH depend on interaction
Wie adaptiv soll der Roboter sein?
Experiment• Round robin design mit 4er Gruppen• Varianz-Partitionierung: Wie konsistent ist das Verhalten über verschiedene Partner hinweg?
Model
Ergebniss
Dominanz in der HRIMensch &
Roboter

Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen Seite 22
Gibt es verschiedene Rollen in der Aufgabendurchfürhung? Können wir vorhersagen, wer die nächste Entscheidung dominiert, wenn wir wissen, wer vorher mehr Kraft aufgebracht hat?
CD
PD
!
lnP(CDd ,k
b =1br )P(CDd ,k
b = 0br )
" # $
% & '
= B0 + B1P D d ,k + B2FB + B3P D d ,kFB + B4DT
PredictedV VH
Observed CD = 0 CD = 1 CD = 0 CD = 1
CD = 0 64% 73%
CD = 1 65% 71%
CD = 1
Physical Dominance
CD = 0
Esti
mat
ed P
robab
ilit
y CD
= 1
Esti
mat
ed P
robab
ilit
y CD
= 0
Experiment• Verhalten vor und in Entscheidungen vergleichen
Model
Ergebniss
Dominanz in der HRIMensch &
Roboter

Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen Seite
Evaluation
23
Vergleich von 4 „Partner“ 1. Zufallssignal 2. Feedforward Modell (replay) 3. Feedback Modell (error reduction) 4. Mensch
Thurstone Scale der„human-likeness“ basierend auf paarweisem Vergleich
Fehl
er
Sub. Leistung
Evaluation
Haptischer Turing Test

Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen Seite
Methoden der Psychologie
• Analyse: Generierung neuen Wissens über Menschen
• Qualitative Analyse
• Quantitative Analyse
• Experimente
• Synthese: Unterstützung durch bestehendes Wissen über Menschen
24
Implementation
Project-management
Prototyping
User & Context Analysis
Concept & Design
Evaluation
Prozesse Human Centered Design / Design Thinking

Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen Seite
UX Strategy für MTI
25
DOsInvest: Low risk / promise benefit
DONTsDo not invest
MAYBEs Keep watching, if
feasibility or desirability increases
Desi
rabi
lity
Feasibility
Technologien
Restricted © Siemens AG 2014. All rights reserved. No image rights.
Function
Standard Use Case
Owner / Company
Link / info sources
Gesture Recognition Bracelet Input - Motion - Gesture
A bandage around the arm makes it able to control computers, phones or any other devices touch less with simple gestures or movements by measuring the electrical activity in one’s muscles.
unknown
Thalmic labs
Thalmic labs Myo - Homepage
MYO - Video
Restricted © Siemens AG 2014. All rights reserved. No image rights.
Function
Standard Use Case
Owner / Company
Link / info sources
Augmented Reality GlassesOutput – Augmented Reality
Glasses with a small display enabling augmented reality via additional information. The displayed content can be controlled by different devices, mostly wearables or speech input. In addition glasses maybe enhanced by camera, microphones, speakers, radio, GPS etc. (Google version).
Unknown, YouTube - Video
Google, Olympus
Google Glass - HomepageWired - ArticleDigital Trends - ArticleVideo
Restricted © Siemens AG 2014. All rights reserved. No image rights.
Function
Standard Use Case
Owner / Company
Link / info sources
Augmented Reality with DeviceOutput – Augmented Reality
A virtual environment, that overlies and/or interacts with the real environment. Technology for many different applications.
Entertainment, Healthcare diagnosis, Construction support
Unknown, Wikitude (SDK)?
MIT – ArticleTreehugger – Articlecnet – ArticleTEDVideoVideo
Restricted © Siemens AG 2014. All rights reserved. No image rights.
Function
Standard Use Case
Owner / Company
Link / info sources
LED Glasses Interface Input / Output - Touchscreen
Interfaces made of glass.
Entertainment
Polytron TechnologiesSamsungCorning (Idea of a world made of glass)
Techcrates - ArticleTech & Science - ArticleVideo – Polytron Technologies DemoVideo - Samsung Product Demo Video – Corning Incorporated Demo
Restricted © Siemens AG 2014. All rights reserved. No image rights.
Function
Standard Use Case
Owner / Company
Link / info sources
Holographic Display in “Air”Output – Holographic Display
A 3D rendering displayed in air using different techniques of laser projection, e.g. particles in the air with a ventilator or water drops as fog. First approaches towards data manipulation (input) also realized (Displair, Heliodisplay) .
Unknown
DisplairIO2 Technology FogscreenHewlett & Packard
Fogscreen - HomepageDisplair – HomepageArticle – HP 3D in AirApimac - ArticleVideo – DisplairVideo - Heliodisplay
Restricted © Siemens AG 2014. All rights reserved. No image rights.
Function
Standard Use Case
Owner / Company
Link / info sources
Holographic Display in “Frame” Input / Output – Holographic Display
A device, that creates a holography in an operating space, where the user can directly manipulate data and windows with his hands.
unknown
MicrosoftPhilips
Jinha Lee - HomepageArticle - Philips RealView
Video - Microsoft DemoVideo – Philips RealView Demo
Restricted © Siemens AG 2014. All rights reserved. No image rights.
Function
Standard Use Case
Owner / Company
Link / info sources
Remote ManipulationInput / Output - Robotic
Here the user is not only displayed visually in a remote location but can also manipulate objects there. This implies that according hardware is available in the remote location and motion / force tracking takes place in the original location..
Remote tactile communication
Universitat de BarcelonaSynTouchTACTILU
TACTILU - HomepagePSFK Labs – ArticleBeaming Project – ArticleDesign Boom – Article Popsci - ArticleVideo – inFORMVideo – BBC Documentation
Restricted © Siemens AG 2014. All rights reserved. No image rights.
Function
Standard Use Case
Owner / Company
Link / info sources
EEG based Brain Computer Interfaces Input - Brain Computer Interfaces
Operate with a computer by only using electrical activity of the brain by usingElectroencephalography (EEG) via a helmet
Automotive, Gaming, Healthcare
EmotivNeuroSkyResearch Groups at different Universities
Emotiv – HomepageNeuroSky - HomepageArticle in GermanVideo – MMSPGroup DemoVideo NeuroSkyVideo- Emotiv TED talk
Lean Startup(Ries)
Business Model
Canvas (Osterwalder
et al.)
Ux Strategy (Levey)

Dr. Raphaela Groten Mensch Technik Interaktion FH Aachen Seite
Interesse?Videos, Paper, Literaturempfehlungen • Psychologie in der Mensch Technik Interaktion
• HCI • HRI
• Innovation & UX Strategy • Methoden des Human Centered Designs • Methoden der Psychologie: Fragebogen, Experimente und Statistik, …
Email an [email protected]
26
Ich danke meinen Koautoren für die Zusammenarbeit


















