Gear Noise
26
GEAR NOISE AND VIBRATION – A LITERATURE SURVEY Mats Åkerblom [email protected] Volvo Construction Equipment Components AB SE–631 85 Eskilstuna, Sweden Abstract This paper is a survey of the literature on gear noise and vibration. It is divided into three parts, “Transmission error”, “Dynamic models” and “Noise and vibration measurement”. Transmission error (TE) is considered to be an important excitation mechanism for gear noise and vibration. The definition of transmission error is “The difference between the actual position of the output gear and the position it would occupy if the gear drive were perfectly conjugate”. Dynamic models of the system consisting of gears, shafts, bearings and gearbox casing are useful in order to understand and predict the dynamical be- haviour of a gearbox. Noise and vibration measurement and signal analysis are important tools when experimentally investigating gear noise because gears create noise at specific frequencies, related to number of teeth and the rotational speed of the gear. Keywords: gear, noise, vibration, transmission error, dynamic models.
-
Upload
waqar-siddiqui -
Category
Documents
-
view
143 -
download
8
description
Gear & Gear Design
Transcript of Gear Noise

GEAR NOISE AND VIBRATION – A LITERATURE SURVEY
Mats Åkerblom
[email protected] Volvo Construction Equipment Components AB
SE–631 85 Eskilstuna, Sweden Abstract
This paper is a survey of the literature on gear noise and vibration. It is divided into three parts, “Transmission error”, “Dynamic models” and “Noise and vibration measurement”. Transmission error (TE) is considered to be an important excitation mechanism for gear noise and vibration. The definition of transmission error is “The difference between the actual position of the output gear and the position it would occupy if the gear drive were perfectly conjugate”. Dynamic models of the system consisting of gears, shafts, bearings and gearbox casing are useful in order to understand and predict the dynamical be-haviour of a gearbox. Noise and vibration measurement and signal analysis are important tools when experimentally investigating gear noise because gears create noise at specific frequencies, related to number of teeth and the rotational speed of the gear.
Keywords: gear, noise, vibration, transmission error, dynamic models.

1
CONTENTS 1 TRANSMISSION ERROR................................................................................................. 2
1.1 Introduction to transmission error.................................................................................... 2 1.2 Transmission error theory ................................................................................................ 2 1.3 Transmission error measurement..................................................................................... 5 1.4 Gear inspection using transmission error measurement .................................................. 7 1.5 Transmission error calculation......................................................................................... 8 1.6 Correlation between calculated TE, measured TE and measured noise and vibrations 10 1.7 Other noise and vibration measurements....................................................................... 14 1.8 Friction and bending moments as gear noise excitations............................................... 15
2 DYNAMIC MODELS....................................................................................................... 15
2.1 Introduction to dynamic models .................................................................................... 15 2.2 Lumped parameter dynamic models .............................................................................. 15 2.3 Dynamic models of complete gearboxes ....................................................................... 17 2.4 Experimental investigations........................................................................................... 18 2.5 Noise prediction models (equations) ............................................................................. 19
3 NOISE AND VIBRATION MEASUREMENT.............................................................. 20
3.1 Introduction to noise and vibration measurement.......................................................... 20 3.2 Gear noise measurement ................................................................................................ 20 3.3 Gear fault detection........................................................................................................ 21
4 CONCLUSIONS................................................................................................................ 21 REFERENCES..................................................................................................................... 22

2
1 TRANSMISSION ERROR 1.1 Introduction to transmission error The most frequently used type of gear profile is the involute. It is used for cylindrical spur and helical gears as well as for conical gears like beveloid, hypoid and spiral bevel gears. Some characteristics of involute (cylindrical) gears that have made them so common are:
• Uniform transmission of rotational motion, independent of small error in centre distance.
• The sum of the contact forces is constant and the direction of the total contact force al-ways acts in the same direction.
• An involute gear can work together with mating gears with different number of teeth.
• Manufacturing is relatively easy and the same tools can be used to machine gears with different numbers of teeth. (Applies to hobs, shaper cutters, grinding worms, shaving cut-ters but not to profile tools like milling cutters and profile grinding wheels).
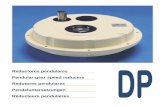
If the gears were perfectly rigid and no geometrical errors or modifications were present, the gears would transmit the rotational motion perfectly, which means that a constant speed at the input shaft would result in a constant speed at the output shaft. The assumption of no friction leads to that the gears would transmit the torque perfectly, which means that a constant torque at the input shaft would result in a constant torque at the output shaft. No force variations would exist and hence no vibrations and no sound (noise) could be created. Of course, in real-ity, there are geometrical errors, deflections and friction present, and accordingly, gears some-times create noise to such an extent that it becomes a problem. 1.2 Transmission error theory Transmission error (TE) is considered to be an important excitation mechanism for gear noise and vibration. The definition of transmission error made by Welbourn [20] is “The difference between the actual position of the output gear and the position it would occupy if the gear drive were perfectly conjugate”. This may be expressed as angular displacement or as linear displacement at the pitch point. An example of a typical transmission error signal is shown in figure 1.1.

3
Figure 1.1 Example of typical transmission error signal and its component’s. The causes of transmission error are deflections, geometrical errors and geometrical modifica-tions. Examples of deflections: • Contact deformations (hertzian) in the gear mesh • Gear teeth bending deflections • Gear blank deflections • Shaft deflections • Bearing and gearbox casing flexibility Examples of geometrical errors: • Involute alignment deviations • Involute form deviations • Lead deviations • Lead form deviations • Gear tooth bias • Pitch errors • Run-out • Error in bearing position in the casing
-200
-150
-100
-50
0
50
Total TE
Pinon run out
Tooth to tooth TE
Gear run out
Once per tooth-pass errorTwice per tooth-pass error

4
Examples of some common geometrical modifications: • Lead crowning • Helix angle modification • Profile crowning • Tip relief and root relief Transmission error can be measured statically or dynamically (low or high speed), unloaded or loaded (light or heavy load) see table 1.1. Static unloaded transmission error is the most commonly used for gear quality inspection purposes because it gives information about the gears manufacturing errors. Static loaded measurement also includes the deflections. The most relevant transmission error measurements for noise and vibration predictions are proba-bly the dynamic (loaded or unloaded). When measuring dynamic transmission error, the gears should be in the gearbox, because the dynamical properties of the system consisting of gears, shafts, bearings and casing are important. In production gearboxes it is often difficult to measure transmission error, due to the inaccessibility of free shafts [12].
Load (torque) Low High
Low Static Unloaded
Static Loaded Speed
High Dynamic Unloaded
Dynamic Loaded
Table 1.1 Static/dynamic, loaded/unloaded transmission error.
The frequency content of the transmission error signal is often acquired by frequency analysis using FFT (Fast Fourier Transform) [1] [6] [25]. Usually it is the tooth mesh frequency and its harmonics that causes gear noise. The once per revolution transmission error is seldom a problem itself because the frequency is relatively low, but the once per revolution transmission error, due to for example run-out, causes side-bands to the gear mesh frequency, with the frequency of tooth mesh frequency +/- the shaft rotational frequency [1]. In addition to the tooth contact frequency, there are sometimes “ghost” or “phantom” fre-quencies, as a result of cyclic errors in the master worm wheel drive in the grinding machine used to finish cut the gears. These errors are imprinted onto the gear teeth as a helix undula-tion on each tooth and they are sometimes an important source of transmission error [5]. “Phantom” frequencies may also originate from the dressing wheel, used for dressing the grinding wheel, when grinding gears [4]. The diamond grains on the dressing wheel causes undulations on the grinding wheel surface and when grinding the gear, also the gear flank surface will have undulations (waviness). These undulations typically have wavelengths of about 0.5 mm and amplitudes of approximately 4μm.

5
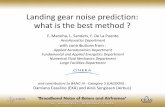
Kohler and Regan [7] investigated the effect of pitch errors on transmission error of a gear pair. They stated that other researchers were wrong when they assumed that if pitch errors alone are present, the frequency spectrum of the corresponding transmission error will have no component’s either at the tooth mesh frequency or any of its harmonics. It was showed (theoretically) that, in general, tooth contact harmonics of significant amplitudes will exist, except for unity contact ratio gears (εα=1). The results of Kohler and Regan [7] were ques-tioned by Welbourn [8]. The need for experimental evidence of theoretical results was em-phasised. In Welbourn’s earlier analyses of how pitch errors affects transmission error, he analysed pitch errors as a series of pulses and not steps as in [7]. Kohler and Regan notes, in a comment to [8], that Welbourn does not question the most important conclusion of their pa-per, that pitch error will generate transmission error at tooth contact frequency and its har-monics. 1.3 Transmission error measurement Transmission error is often measured with optical encoders, which gives typically several thousands of pulses per revolution. The transmission error is acquired by comparing the sig-nals from the two encoders on each shaft [1]. Another possible measurement technique for dynamic transmission error is to measure torsional accelerations on both shafts of the gearbox and taking the difference of the two accelerations (corrected for speed ratio) and then inte-grate the signal twice to obtain the transmission error signal [12]. Opitz [21] used seismic mass torsional displacement pickups to measure transmission error. Commercial available inspection machines are usually designed for static unloaded transmis-sion error measurement. It is only quite recently that commercial inspection machines are available for measuring loaded transmission error, statically and dynamically. The maximum torque available is however not very high, even for automobile gears. It may also be ques-tioned if it is relevant to measure dynamic transmission error in a machine with other dynamic characteristics than the gearbox the gears are going to work in. A typical transmission error measuring arrangement is shown in figure 1.2.
Figure 1.2 Transmission error measurement utilising optical encoders.

6
Smith [3] tested two small (90mm diameter, 9000 pulses/rev.) optical encoders back to back. The results showed errors below 0.1 seconds of arc at the frequencies likely to be relevant for gear noise and vibration testing. The conclusion was that these small and robust encoders are suitable for measurement of gear transmission error. Optical encoders were also used by Mudd et al. [5] to measure transmission error of marine gears. Measurements were carried out on 560 mm centre distance, case hardened and ground double helical gears, typical of those used for the primary reduction of marine gearboxes. Measurements were made without load (very low load) and for torque 3.4 kNm (quasi static), on four different gear sets, manufactured using different MAAG-grinding machines. Sasaoka [6] described an instrument, with which the transmission error of gears can be meas-ured at various rotating speeds and loads. The torsional vibration modes of the power trans-mission system in the instrument were analysed and the frequency range between the first and second mode was used to avoid the effects of resonant vibrations of the power transmission. Torsional stiffness adjustment sections were installed in the power transmission system to control the natural frequencies. A modular system for transmission error measurement was described by Smith [9]. The sys-tem consisted of optical encoders and a number of electronic modules (frequency multiplier, frequency divider, phase comparator and filter). Dependent on number of teeth on the gears, the multiplier and divider were chosen to give the same number of pulses per revolution (of one of the gears) from both encoders. The phase comparator compares the phase of the two signals. The error signal was obtained after filtering the output signal from the phase com-parator. Conclusions were that the flexibility of a modular system allows testing over a wide range of speeds, from about one revolution per minute to several thousands of revolutions per minute. The limit was imposed by the mechanics of the encoders and was typically a torsional vibration limit at about 1500 Hz. Houser and Wesley [12] used four different methods for measuring transmission error under load and at operating speed. Three different test stands and four different types of instrumen-tation were used for the transmission error measurements. In a low speed (6.3 r/min) high torque (670 Nm) test rig with two electrical DC motors, transmission error was measured for two gear pairs mounted in a commercial gearbox. The tested gear pairs were 7.5 inch centre distance helical and spur gears, both gear pairs were hobbed and shaved and they had profiles with significant deviations from ideal. Transmission error was measured with optical encoders from a commercial system, and the pulses were processed in a phase detection loop to provide a measure of the difference in the shaft rotations. The predominant oscillation frequency was the tooth mesh frequency. The transmission error of the helical gear pair was in the same or-der of magnitude as for the spur gear pair. In order to measure dynamic transmission error, two 7.5 inch centre distance gearboxes were mounted in a back to back arrangement. The rig was first run statically with transmission er-ror being measured with the system described earlier. Later a higher speed encoder system was used to measure dynamic transmission error. It was found that this kind of circulating power system is acceptable if no large transmission errors are present. The reason is that large transmission errors affect the magnitude of the torque locked in the system, which in turn causes a shift in the mean transmission error. The dynamic transmission error was measured using optical encoders (3.6 inch diameter and 18000 lines per revolution) and high speed

7
processing of the information was achieved by using different electronic circuitry. The major speed limitation was the natural frequency of the encoder rotary inertia / shaft / coupling, which was at about 2000 Hz. Two different torsional accelerometer types were used for transmission error measurements. The first was a tangential type, which used two opposing linear accelerometers. The combined torsional accelerometer calibration did not work out well due to large variation in amplitude with frequency. Finally a commercial torsional accelerometer was used. These accelerometers were used to measure transmission errors of both spur and helical gears. Several methods of computing the dynamic transmission error were tried, using the torsional accelerometers. Each of the four methods for measuring transmission error that were investigated had its limi-tations. In particular, mechanical resonance of the transducers seemed to limit measurements to an upper frequency of 2000 Hz. Both the encoders and the torsional accelerometers ap-peared to have the capability to measure transmission error in the μ-in resolution range. 1.4 Gear inspection using transmission error measurement The use of TE–measurement for quality inspection of production gears is attractive because it gives information about the gear pairs noise and vibration characteristics. For example, the quality of hypoid- and spiral bevel (conical) gear sets is often checked by measuring transmis-sion error in a single flank tester. For cylindrical gears, the use of transmission error meas-urements for inspection of production quality has not, at least so far, been frequently used. The reasons are probably the differences in manufacturing methods between cylindrical gears and conical gears. Conical gears are often manufactured as gear sets, and lapped together as finishing operation, which makes the pinion and the gear a pair, that must be kept together. Cylindrical gears are usually not manufactured as matched pairs, they can work together with just any of its mating gear individuals. Transmission error for just one gear can be measured using a master gear, but transmission error is not “additive” because geometrical errors can either counteract or interact. This means that two gears with high transmission error, when tested against a master gear, can have low transmission error when tested against each other. Furthermore conventional gear inspection gives information about elemental errors and hence, it is easier to make changes in the production process to correct these errors. Conclusions drawn by Kohler and Regan [7] are that the combination of gear elemental errors to give a total transmission error is a non-linear process (in the mathematical sense) and it is not correct to determine the total transmission error spectrum by the summation of elemental spectra. A gear pair with certain elemental errors will have a certain transmission error and a gear pair with different elemental errors might have the same transmission error. This means that knowledge of elemental gear errors leads to transmission error but transmission error does not lead to knowledge about elemental gear errors.

8
1.5 Transmission error calculation The calculation of transmission error is useful for several purposes, some examples are: • To choose appropriate gear geometry to minimise the variations in mesh stiffness, i.e.
determine module, helix angle and contact ratio. • Determine gear tooth modifications like crowning and tip relief (magnitude and starting
point) to minimise transmission error. • Investigate how different manufacturing errors influence gear noise and vibration charac-
teristics. • To obtain input to dynamic models of gear systems. A mathematical model for transmission error calculation must take into account flexibility and gear tooth errors and modifications. Numerous researchers have described methods for calculation of transmission error. In order to calculate transmission error, Sweeney [1] developed a mathematical model which took into consideration mesh stiffness (contact deformation and tooth body deflection) and geometrical modifications/errors such as tip relief, root relief, profile slope, profile crowning, lead crowning, lead deviation and tooth spacing errors (pitch errors). In an angle stepping numerical simulation the transmission error was calculated for each step. Yoon [2] proposed a method to reduce noise from involute gears. The idea is to use cubic splines to describe the tooth profile. The gear teeth are designed to assume an involute shape under load. This ensures conjugate motion under load. The method results in a more uniform static transmission error compared to standard involute profile. The methodology was also extended to helical gears. The concept of optimal modification of the plane of action was used to calculate the new profile. A dynamic analysis of the gear drive was performed to establish the fact that a reduction in transmission error reduces the gear vibration and noise due to smaller dynamic tooth loads. A parameter study was conducted to compare the cubic splines based gear profile to involute profile and those based on the use of linear or parabolic tip re-lief. Kato et al. [10] used a computer program to calculate transmission error. Input to the program was tooth surface modifications and load conditions. Calculated transmission error was shown to agree well with measured. Methods for transmission error calculation and tooth contact analysis were discussed by Houser [22] and different methods for calculating tooth compliance (plate theory and FEA) were compared. Flodin [28] investigated mild wear of spur and helical gears. Wear simulations showed that for helical gears without lead crowning or tip relief, the simulated wear reduced calculated transmission error. DeJong and Manning [13] used a numerical model of the gear mesh to calculate transmission error of a gear pair. The calculations of transmission error took into account geometrical er-rors and modifications, manufacturing tolerances and the gear mesh compliance. The trans-mission error calculation algorithm is described below, as an example of a typical algorithm:

9
1. The nominal lines of contact along the gear teeth are discretized into a series of points, whose spacing are chosen to minimise quantization error.
2. Each contact point is assigned an initial separation, εi, equal to the sum of the deviations from involute of the two tooth profiles in contact at that point. By definition εi ≥ 0. The deviations from involute can be due to profile errors, modifications, misalignment, etc.
3. The local deflection, δii, at a contact point is defined as the sum of the deflections of the two teeth at that point under a force, Fi. These quantities are related by, δii = CiiFi, where Cii is the local compliance of the contact point. A contact point may also be deflected due to forces at other contact points due to a cross compliance, Cij or δij = CijFj . The net de-flection, δi , of a contact point is then given by: j
jij
jiji FC∑∑ == δδ
It is assumed that only compressive forces normal to the surfaces occur at each contact point so that Fi ≥ 0 and δi ≥ 0. The deflection at any point is thus determined from the spa-tial distribution of forces in the zone of contact.
4. By defining a relative rigid body displacement, α, of the two gears at the mesh and an instantaneous separation, Yi, between contact points, then compatibility can be used to re-late the above variables at each contact point by: Yi – δi = εi – α Inserting the forces into the equation and converting to matrix notation to encompass all the nominal contact points gives: { } [ ] { }αε +−= − YCF 1 where either Fi = 0 or Yi = 0, since there can only be a force at a contact point if there is no separation and visa versa. The sum of all forces, Fi, in the zone of contact is constrained to be equal to the applied load.
5. The compliance matrix for the gear mesh is obtained from finite element analyses or from analytical models of the gear elements. The compliance matrix includes contributions from the tooth bending and root rotation, local Hertzian deformation, gear/shaft torsion and bending, and bearing deflection.
6. An efficient revised simplex algorithm for solving this set of equations is used. This algo-rithm has a first phase in which the load distribution among the points in contact is ob-tained. A second phase then optimises a set of parameters based on a performance crite-rion specified as a linear combination of the variables or parameters of the system. In ad-dition to the performance criterion, any number of linear constraints can be put on the variables such as maximum levels of the contact stresses, sliding velocities or deflections.

10
7. The relative rigid body displacement of the two gears in mesh under load gives the value for the transmission error for a given position of the teeth in mesh. The position of the teeth is moved incrementally through the mesh and a new value for the transmission error is computed for each position. The spectrum of the TE is computed by Fourier analysis to give a vibration excitation function. Alternatively the force distribution on the gear teeth is computed as a function of time to be used as an input to a dynamic model of the gear structure.
1.6 Correlation between calculated TE, measured TE and measured noise and vibrations Numerous researchers have investigated the correlation between calculated transmission er-ror, measured transmission error, measured vibrations and measured noise. A general opinion seems to be that transmission error is a useful tool when working with gear noise, even though it is sometimes questioned if vibrations and noise are the direct (and linear) result of TE [1]. In addition to transmission error there are also other possible excitation mechanisms [18]. Sweeney [1] carried out a test program to investigate the effects of load (mean torque) and speed on transmission error, vibration (casing), noise and torque fluctuations. The result was that it was difficult to draw any broad conclusions about the relationships of various quantities measured, other than that they generally trend in the same direction with variation in torque and speed. It was also emphasised that there is no physical basis for an ideal correlation be-tween transmission error, vibration and noise in the general case, even if some researchers have assumed that vibration and noise emission are the direct (and linear) result of TE. A gear test rig was designed and built for verification of the mathematical model used to cal-culate transmission error. Transmission error was measured with optical encoders and vibra-tions were measured on the gearbox casing with an accelerometer and noise was measured with a microphone. Two different types of gears were used for verification of the TE calculations:
Type I – Hobbed, shaved and heat treated helical gears.
Type II – Hobbed, shaved, heat treated and ground spur gears. Both types of gears were considered being below automotive production quality. Measured and calculated transmission error were compared for both types of gears for:
Shaft speed 2Hz
Torque 20 Nm and 70 Nm
Parallel shafts and for 1/500 misalignment. The correlation between measured and calculated transmission error was good, especially for the type II gears (spur, ground).

11
Mudd et al. [5] measured transmission error and bearing cap vibration and a comparison showed that all (frequency-) component’s measured using transmission error, exhibited them-selves at the bearing cap vibration under (at least) one of the three conditions (different speeds 214, 433 and 1368 r/min). The dynamics of the system changed dramatically between differ-ent speeds. Resonance and mobility checks indicated that the primary wheel was the source of most of this resonant response. An analytical procedure to determine the optimum tooth surface modifications was developed by Kato et al. [10]. Gear noise level was shown to correspond with the magnitude of meas-ured transmission error for a gear pair. Calculated transmission error was shown to agree well with measured. For a test gear pair, the value of each modification factor were determined and as a result a significant improvement in noise level was achieved. The studied factors were pressure angle modification, tooth profile crowning, lead modification, lead crowning and tooth profile bias. Nakagawa et al. [11] carried out experimental measurements of the mechanical vibration of a gearbox equipped with a pair of helical gears. The result showed that gears with bias-in con-tact and true involute gears caused a lower vibration level than bias out gears. Technical data for the gears used were: centre distance 75 mm, module 2 mm, pressure angle 20 deg., helix angle 35 deg., number of teeth 29 and 35, face width 14 mm, transverse contact ratio 1.901, overlap ratio 1.278. The maximum load and speed was 120 Nm and 5400 r/min. The evalua-tion was made at 4200 r/min where the vibration levels reached its maximum due to the vibra-tion characteristics of the test apparatus. Transmission error measurements showed the same tendencies as the vibration measurements on the gearbox. An investigation was made on the effects of lead error on gear tooth contact. FEM calculations were compared to measurements of transmission error. Different lead errors and different amount of lead crowning was inves-tigated. FEM calculation showed the same tendencies as the experimental data. DeJong and Manning [13] used cepstral analysis of measured gear vibration in order to under-stand the fundamental mechanisms of vibration excitation at the gear mesh. Experimental measurements were made on a gearbox with two gear pairs with number of teeth 20/28 re-spectively 20/25. Vibrations were measured with an accelerometer at the housing and cepstral analysis was used to take out the effects of resonant response of the system. Cepstral analysis allows for the time signal to be reconstructed, which is useful for monitoring machine per-formance. The cepstrum, cy, of a signal, y(t), is defined as the fourier transform of the log spectrum of the signal. It is a function of delay time, τ in the same way as an autocorrelation function:
( ) ( )[ ]{ }fYFTcy πτ 2log=
where ( ) ( ){ }tyFTfY =π2

12
The vibration signal from a gear with mesh tones at 400 Hz and its harmonics will have peaks in the cepstrum at delay times of 2.5 ms and integer multiples. If the signal is represented by a magnitude, ( )fAy π2 , and a phase, ( )fy πφ 2 , as a function of frequency, f, then the log spec-trum is given by:
( )[ ] ( ) ( )fjfAfY yy πφππ 22log2log += which is a function with complex amplitude. The cepstrum of this function is called the com-plex cepstrum. A cepstrum of only the log amplitude function can be defined as:
( ) { }yy AFTc log=′ τ and is called the real or power cepstrum. The log operation on the spectrum can also be used to separate the input and transfer function aspects of a measured signal. If the spectrum of signal y is the product of input spectrum X and a transfer function H
XHY ⋅= then the cepstrum of y is given by:
{ } xhy ccXHFTc +=+= loglog The function ( )tx is the input time signal and ( )th is the impulse response of the transfer sys-tem. If these two signals have different delay characteristics, they can be separated in the cep-stral domain even though they overlap in the frequency domain. Examples were shown on measured spectra and cepstrum of bearing housing acceleration (vibration). Honda [16] proposed that a dynamic incremental load, Fdn, can be used as an index of the dynamic performance (like noise and vibration) of a gear pair. This dynamic incremental load is a function of velocity and operating load, with the parameter of tooth surface modifications, when the dimensions and the tooth pair spring constant of the gear pair is given. Experimental measurement of the noise from a test gearbox was compared with calculated Fdn, and the cor-relation was good. A design method to realise the index Fdn=0 was discussed theoretically, which clarified that there are combinations of tooth surface modifications, tooth pair spring constant and static load which minimises Fdn. In the gear pair which realises Fdn=0 under no load, the tooth surface is not modified and the equivalent tooth pair spring constant does not vary.

13
In a study of gear noise reduction, made by Kawamoto et al. [17], the effects of manufactur-ing errors and contact ratio were investigated for helical gears. Transmission error was calcu-lated for gears with different errors and different total contact ratios. It was shown that for gears with relatively large errors, transmission error decreases considerably with increased total contact ratio. Gears with relatively small errors will have the minimum transmission er-ror at slightly higher total contact ratio than an integer, assuming the gear is in contact over the entire tooth face, but further increase of the contact ratio will not be helpful to reduce transmission error. Finally one conclusion was that tooth face errors are the major cause of transmission error and different number of teeth in contact is less likely to generate transmis-sion error. The effect of misalignment on helical gear vibration excitation was investigated theoretically by Smith [19]. Transmission error and dynamic forces were calculated for a helical gear pair. It was shown that even a small misalignment (60 μm) might cause considerable transmission error and high dynamic forces. Lorea et al. [23] used statistical analysis of transmission error data to predict the acoustic be-haviour of gears. Transmission error was measured for 30 gear pairs from 30 gearboxes, se-lected from three classes (quiet, slightly noisy and noisy). Statistical methods of classification and discrimination were used on the recorded transmission error signal. It was proposed that the adopted approach could be used to predict the noise class of an unknown gearbox on which the transmission error has been measured. Modifications of tooth surfaces were proposed by Iwase and Miyasaka [24] in order to reduce transmission error and gear noise from automobile gears. First the misalignment was meas-ured or calculated, then tilt parameters were optimised. Next step was to optimise the shape parameters: profile modification, crowning, tip relief and bias. Results were decreased trans-mission error (calculated) and decreased gear noise (experimentally measured). Conclusions were that transmission error can be improved (decreased) by increasing the real contact ratio as much as possible. This can be realised by modifying and correcting gear misalignment re-sulting from transmission case production error and other defects, and hence shifting the tooth bearing point to the tooth surface centre, reducing the curvature of tooth surface and obtaining larger bias-in modification. Park [25] described a method for calculating transmission error, load distribution, contact area and root stress. Influence functions obtained from finite element analysis were used when solving the load-deflection equations. A mass/damping/non-linear spring model was used to calculate torsional vibration levels due to tooth errors. An experimental set up was used to verify the calculations A procedure to optimise profile modifications based on the Fourier harmonics of the single flank transmission error of a spur gear pair was described by Tavakoli and Houser [27]. Dif-ferent optimisation parameters were shown to provide different levels of optimisation of the objective function. The combined tip and root relief on both the gear and the pinion teeth gave the best results. It was found that gears with spacing errors resulted in modifications similar to those without spacing errors. The ability to predict the effects of off-optimum loads or manu-facturing errors on the transmission error was shown to be important.

14
1.7 Other noise and vibration measurements Some investigations on gear noise and vibration without discussing transmission error are summarised below. Umezawa et al. [14] investigated the relation between contact ratio and vibration for helical test gears with different contact ratios. The test gears were classified into three categories:
I – total contact ratio (εα+εβ) less than 2
II – total contact ratio over 2 and overlap ratio (εβ) less than 1
III – overlap ratio (εβ) over 1 Rotational and axial vibrations were measured with accelerometers on the gears. The results showed that:
• An increase in the overlap ratio reduces the vibration, especially for overlap ratios over 1.
• The helical gear pair with total contact ratio less than 2 behaved like spur gears. Shetty and Kinsella [15] implemented the method of Dr. Taguchi’s Design of Experiments on the speed gear pairs of a manual transmission. Different combinations of gear geometry char-acteristics were tested. Out of 28 control factors that were identified, 8 primary factors were selected (involute and lead for each of the four gears). The experiment was carried out on a 5–speed manual transmission for medium and light duty trucks. The gear noise was evaluated using a subjective road test rating, with a ten-point scale. Optimum manufacturing tolerances were then set using the results of the experiments. Finally a confirmation run was carried out, where gears, whose lead and involute averages fell at the extremities, were selected from the production line and built into transmissions and tested. All tests had an average subjective evaluating of 8 and above. The conclusion was that high quality and customer satisfaction was achieved at a low cost. Ehren and Becker [26] carried out experimental noise measurements in a test rig to investigate the effect of helix angle error on noise and vibrations from a helical gear pair. It was shown that the sensitivity for helix angle error was different dependent on the direction of the error and for that reason a non-symmetric tolerance area was proposed. The result was lower noise levels with preservation of tolerance width. Beuler [29] investigated the influence of manufacturing errors and gear teeth modifications on noise from a gearbox. Errors possible to occur when shaving and hardening gears were dis-cussed and methods to control the shaving and hardening processes were pointed out, to achieve the same low noise levels as for ground gears but without the higher cost that grind-ing leads to.

15
1.8 Friction and bending moments as gear noise excitations In addition to transmission error there are other possible time varying noise excitation mecha-nisms that might be in the same order of magnitude as transmission error. These mechanisms were investigated theoretically by Borner and Houser [18] and the mechanisms are:
• Bending moment caused by an axial shuttling of the centroid of line of action gear forces as the contact lines move across the gear tooth. This cause the bearing forces to vary, de-pending on the distance between bearings.
• An off-line of action friction component that is not totally cancelled due to opposite direc-tions of relative sliding of the teeth.
• Bending moments in the off-line of action direction that result from shuttling of the fric-tion force in a manner similar to the line of action forces.
Calculations of these forces for gear pairs with different axial contact ratio showed that the variation of the bearing forces have to be considered as a noise source in the case of low transmission error gears. This is valid for the friction forces only for spur gears and for helical gears with a very small helical angle. The bending moments due to the location of the contact lines in the plane of action have to be paid attention particularly in the range of an axial con-tact ratio between 0.75 and 1.25 because they exceed the amount of transmission error excita-tion in this range. That is of special interest because an often-used design criterion for low noise gears is axial contact ratio εβ≈1. 2 DYNAMIC MODELS 2.1 Introduction to dynamic models To understand and control gear noise, it is necessary not only to have knowledge about the gears, but also about the dynamic behaviour of the system consisting of gears, shafts, bearings and gearbox casing. The noise characteristics of a gearbox can be controlled already at the drawing board when designing the gearbox, because all the components have an important effect on the acoustical output [43]. For relatively simple gear–systems it is possible to use lumped parameter dynamic models with springs, masses and viscous damping. For more complex models, which includes for example the gearbox casing, finite element modelling is often used. The first dynamic models were used to determine dynamic loads on gear teeth, and they were developed in the 1920s, the first mass–spring models were introduced in the 1950s [30]. 2.2 Lumped parameter dynamic models Özguven and Houser [30] reviewed the literature on mathematical models used in gear dy-namics, from 1915 and up to 1986. The review is very extensive and includes 188 references. They classified the models in five groups:

16
1. Simple dynamic factor models. This group includes most of the early studies in which a dynamic factor that can be used in gear root stress formulae is determined. These studies include empirical and semi-empirical approaches as well as recent dynamic models con-structed just for the determination of a dynamic factor.
2. Models with tooth compliance. There are a very large number of studies that include only the tooth stiffness as the potential energy storing element in the system. That is, the flexi-bility of shafts, bearings, etc. are all neglected. In such studies the system is usually mod-elled as a single degree of freedom spring–mass system. There is an overlap between the first group and this group since such simple models are sometimes developed for the sole purpose of determining the dynamic factor.
3. Models for gear dynamics. Such models include the flexibility of the other elements as well as the tooth compliance. Of particular interest have been the torsional flexibility of shafts and the lateral flexibility of the bearings and shafts along the line of action.
4. Models for geared rotor dynamics. In some studies, the transverse vibrations of a gear car-rying shaft are considered in two mutually perpendicular directions, thus allowing the shaft to whirl. In such models, the torsional vibration of the system is usually considered.
5. Models for torsional vibrations. The models in the third and fourth groups consider the flexibility of gear teeth including a constant or time varying mesh stiffness in the model. However there is also a group of studies in which the flexibility of gear teeth is neglected and a torsional model of a geared system is constructed by using torsionally flexible shafts connected with rigid gears. The studies in this group may be viewed as pure tor-sional vibration problems, rather than gear dynamic problems.
In a study by Cheng and Wang [31], the vibrations of spur gears were simulated. The dynam-ics of the gears was modelled as a non-linear time-correlated, stationary stochastic process. As excitation of the system, random and harmonic transmission error was used. The vibrations excited by random and harmonic transmission error and time varying mesh stiffness was in-vestigated at different speeds and different loads. Optimisation of gear parameters were made to avoid resonance. Kahrmann and Singh [32] used a two-degree-of-freedom model of a spur gear pair with back-lash, to investigate the non-linear frequency response characteristics, for both internal and external excitations. Transmission error due to variation in mesh stiffness was used as internal excitation and low frequency torque variations were used as external excitation. Two solution methods, digital simulation technique and the method of harmonic balance, were used to de-velop the steady state solutions for the internal sinusoidal excitation. Analytical predictions were shown to match satisfactorily with experimental data available in the literature. A pa-rameter study showed that the mean load determined the conditions for no impacts, single-sided impacts and double-sided impacts. A six–degree of freedom model of a spur gear pair was developed by Torby [47]. The gears were supported by elastic bearings with viscous damping present. Varying mesh stiffness and friction in the gear mesh were included in the model. The equations of motion were solved by numerical integration.

17
2.3 Dynamic models of complete gearboxes Numerous researchers have modelled complete gearboxes in order to predict gear noise. Campell et al. [33] used finite element dynamic modelling methods to predict gear noise from a rear wheel drive automatic transmission. The model was used to investigate the effects of different component’s inertia, stiffness and resonance. The ring gear and shaft resonance’s and the tailstock housing stiffness were found to be significant design factors that influenced the gear–whine. Model construction issues were discussed as well as correlation of predicted gear noise traces with operating measurements. Ariga et al. [35] described a systematic approach to reduce the overall gear noise from a four speed automatic transaxle. The vibration characteristics were identified by finite element analysis. A new gear train structure that would be effective in reducing gear noise was inves-tigated. The effect of the modifications was verified experimentally, and the gear noise level was reduced substantially. Also changes in stiffness of the transmission case, at locations sup-porting the gear train bearings, were shown to affect the gear noise. Dynamic models of typical automotive gearing applications using spur, helical, bevel, hypoid and planetary gear sets were developed by Donley et al. [36]. Basic formulations used in modelling different types of gears were discussed. These models were designed for use in finite element models of gearing systems for simulating gear-whine. A procedure for calculat-ing the dynamic mesh force generated, and gear case response, per unit transmission error was proposed. A simplified automotive transmission was analysed to demonstrate the features of the proposed gear noise reduction technique. A basic approach to gearbox noise prediction was described by Mitchell [38]. The proposed method was dynamic modelling of the gearbox from inside out. The computational strategy for the determination of the dynamic response of the internal gearbox components was de-scribed. Force coupling between gears and dynamic coupling due to for example unbalance was discussed. The transfer matrix approach was used for the analysis and a benchmark ex-ample was presented to verify the calculation method. Hellinger, Raffel and Rainer [40] used numerical methods to calculate gear noise from a transmission. They used finite element analysis to calculate natural frequencies and forced vibrations of the gearbox structure (housing). As input for the FE calculation of forced re-sponse, they used the dynamic bearing forces of the shafts in the gearbox, calculated by a MBS (multi-body system) software. Finite element analysis was used by Nurhadi [41] to investigate the influence of gear system parameters on noise generation. A direct time integrating method was used to predict sound generation, transmission and radiation from mechanical structures. Joachim, Stoffels and Troska [46] optimised the gear noise from a car gearbox. They calcu-lated transmission error and time varying stiffness of the gear mesh by using a finite element based computer program. The results were used as input to a torsional vibration model of the power train (from the engine to the wheels). The output from the torsional vibration model was mesh forces, which were transformed to the frequency domain and used as input to a fi-nite element model of the gearbox, which was used to predict the forced response. As a result of the simulations, a modified gearbox was tested in a car and the gear noise was substantially reduced.

18
2.4 Experimental investigations There are also some experimental studies on gear dynamics. For example, Terauchi et al. [34] investigated the dynamics of straight bevel gears. A power circulating gear test rig equipped with contact–less inductance type accelerometers were used to measure the vibrations of straight bevel gears in three directions. Displacements were shown to depend on the bending stiffness of gear shafts and bearing stiffness. The natural frequencies for torsional vibrations of the gearing system and the natural frequency for bending vibration of the gear shaft also influenced displacements. The vibrations of high frequencies (gear mesh frequency and mul-tiples thereof) were shown to appear in axial direction. Remmers [37] studied the dynamical system of rear axle gears and predicted the existence of a vertical resonance of the pinion. The frequency, predicted with a simple single degree of freedom mass spring model, was close to the frequency of the observed noise peak. Experi-mental studies of a variety of rear axles confirmed the existence of a peak in vibration and corresponding observed noise. The causes and effects of amplitude modulation in rear axle gears were analysed. Pinion motion response spectrums obtained from rear axle assemblies and hypoid gear test machines were shown to relate gear quality measurements to individual gear manufacturing errors like run–out and heat treatment distortions. Also Runge [45] dis-cussed the influence of resonances on gear related noise from axles in vehicles. He showed experimentally that gears with larger errors could be quieter than gears with smaller errors and proposed the use of gear deviations to dampen resonances. Abe and Hagiwara [48] reduced rear axle gear noise in a car, by adding an inertia disk at one sideflange of the final drive, making the dynamical system non-symmetric. This had the effect of decreasing the vibration level of the hypoid gear itself and changing the resonance fre-quency of the driveline. They also decreased the noise level by decreasing the diameter and stiffness of the pinion shaft. The effect of tooth surface roughness on gear noise and gear noise transmitting path was in-vestigated by Ishida and Matsuda [42]. They used a disk machine in which rolling and sliding contact were generated between two disks. The results were compared with results from a gear system in a gear noise testing machine. The influence of bearing positions on sound radiation from a single stage spur gear system was investigated by Zhou et al. [44]. They showed that the bearing offset, from the centre of the housing wall, considerably influenced the vibration and radiated noise. The radiated sound power increased with the offset.

19
2.5 Noise prediction models (equations) In order to obtain a more accurate prediction method of gear noise, a new prediction equation was proposed by Masuda et al. [39]. The equation was obtained by adding a dynamics term to Kato’s equation.
Katos equation: ( )( ) )(log202/tan1204
8
AdBWf
uLv
+•−=αε
β
Where: L : overall noise level at 1 meter from a gearbox β : helix angle u : gear ratio εα : transverse contact ratio W : transmitted power in hp fv : speed factor (analogous to dynamic factor in JIS – B1702) The new prediction equation was derived by replacing the speed factor fv by AGMA’s rec-ommendation )56.5/(56.50 vfv += and adding the effects of dynamics. New prediction equation:
( )( ) )(~log20log2056.5
56.52/tan1204
8
AdBXWvuL +++•−=αε
β
Where: L : overall noise level at 1 meter from a gearbox β : helix angle u : gear ratio εα : transverse contact ratio W : transmitted power in kW v : pitch line speed in m/s X~ : Vibration displacement amplitude normalised by static deflection, calculated by vibration analysis using a simple torsional dynamic model. Predicted noise levels were compared with experimental noise measurements for hobbed gears and gears ground with two different grinding methods and the correlation was good.

20
3 NOISE AND VIBRATION MEASUREMENT 3.1 Introduction to noise and vibration measurement Noise and vibration measurement and signal analysis are important tools when experimentally investigating gear noise. Gears create noise at specific frequencies, related to the rotational speed and number of teeth of the gear. It is also possible to detect different errors like for ex-ample run out (eccentricity) due to side-band generation [1]. Closely related is also vibration measurement and signal analysis for the purpose of gear fault detection, used in machine di-agnostics in order to detect gear failures before catastrophic failure occurs. 3.2 Gear noise measurement Middelton [50] discussed noise testing of gearboxes in the production line. A noise testing equipment, utilising low cost digital analysis and control techniques was described. For each gear of the gearbox, the speed was ramped up while measuring noise with three microphones. For each order of interest (gear mesh frequency and its harmonics) the pass/fail target levels were defined by testing a selection of gearboxes which had noise characteristics regarded as just acceptable. A test rig was developed by Gielisch and Heitmann [51] to investigate gear noise from a car rear axle, without the need for a complete vehicle. Vibrations were measured on the final drive casing and the corresponding forces and torques in the gearing were calculated. The investigation gave information about the dynamics of the driving gear and the possibility to make comparisons between different driving gears. Oswald et al. [52] investigated the influence of gear design on gearbox radiated noise. Nine different spur and helical gear designs were tested in a gear noise test rig to compare the noise radiated from the gearbox top for the various gear designs and the results were:
• The total contact ratio was the most significant factor for reducing noise, increasing either the profile or face contact ratio reduced the noise.
• The non-involute spur gears were 3–4 dB noisier than involute spur gears.
• High contact ratio spur gears showed a noise reduction of about 2 dB over standard spur gears.
• The noise level of double helical gears averaged about 4 dB higher than otherwise similar single helical gears.
• In noise reduction tests, variation due to unintended effects, such as testing different part specimens or even re-assembly with the same parts, may be of the same order of magni-tude as the effect of deliberate design changes

21
3.3 Gear fault detection Methods for vibration measurement and gear fault detection were investigated and developed by Limmer [49]. A four square test rig was used to obtain vibration data from a run to gear-failure. Both torsional and translational vibrations were measured. A new telemetric torsional vibration sensor was developed. Different methods for condition assessment were compared. The use of time-frequency-analysis (TFA) in machine diagnostics was discussed by Klein and Stockmanns [53]. The different TFA methods: Short-Time-Fourier-Transformation, Gabor-Transformation, Pseudo-Wigner-Ville-distribution, Choi-Williams-distribution and Wavelet transformation were described. 4 CONCLUSIONS Most authors seem to agree that transmission error is an important excitation mechanism for gear noise and vibration. The definition of transmission error is “The difference between the actual position of the output gear and the position it would occupy if the gear drive were per-fectly conjugate”. In addition to transmission error, friction and bending moment are other possible time varying noise excitation mechanisms that might be in the same order of magni-tude as transmission error, at least in the case of low transmission error gears. Dynamic models of the system consisting of gears, shafts, bearings and gearbox casing are useful in order to understand and predict the dynamic behaviour of a gearbox. For relatively simple gear-systems it is possible to use lumped parameter dynamic models with springs, masses and viscous damping. For more complex models, which includes for example the gearbox casing, finite element modelling is often used. Noise and vibration measurement and signal analysis are important tools when experimentally investigating gear noise because gears create noise at specific frequencies, related to number of teeth and the rotational speed of the gear.

22
REFERENCES TRANSMISSION ERROR
1. Sweeney P. J. ”Transmission error measurement and analysis” University of New South Wales, Doctoral Thesis, 1995.
2. Yoon K. ”Analysis of Gear Noise and Design for Gear Noise Reduction” Purdue Univer-sity, Doctoral Thesis, 1993.
3. Smith J. D. ”Gear Transmission Error Accuracy with Small Rotary Encoders” IMechE 1987, SAE Technical Paper 874773.
4. Amini N. “Gear Surface Machining for Noise Suppression”, Chalmers University of Technology, Doctoral Thesis, 1999.
5. Mudd G. C., Penning G. M., Hillings N. J. ”The Application of Transmission Error Measurement to the Reduction of Airborne and Structure-borne Noise in Gearing Trans-mission Systems” C258/83 ImechE 1983.
6. Shigefumi S. ”Measurement Technique for Loaded Gear Transmission Error” SAE Tech-nical Paper 970973.
7. Kohler K., Regan R. ”The Derivation of Gear Transmission Error from Pitch Error Re-cords” 61/85 IMechE 1985.
8. Wellbourn D. B. ”Discussion” (The Derivation of Gear Transmission Error from Pitch Error Records), IMechE 1986.
9. Smith J. D. ”A Modular System for Transmission Error Measurement” 133/88 IMechE 1988.
10. Kato S., Yonekura K., Omori T. ”Analytical Procedure for Gear Tooth Surface Modifica-tion Reducing Gear Noise” SAE Technical Paper 852273.
11. Nakagawa I. et al. ”Effects of Gear Tooth Contact on Automobile Transmission Gear Noise” C382/043 IMechE 1989.
12. Houser D. R., Wesley G. ”Methods for Measuring Gear Transmission Error Under Load and at Operating Speeds” SAE Technical paper 891869.
13. DeJong R. G., Manning J. E. ”Gear Noise Analysis Using Modern Signal Processing and Numerical Modelling Techniques” SAE Technical Paper 840478.
14. Umezawa K. et al. ”Vibration of Power Transmission Helical Gears (The effect of con-tact ratio on the vibration)” Paper No. 238-18, Bulletin of JSME, Vol. 28, No. 238, April 1985.
15. Shetty R. R., Kinsella J. ”Gear Noise Development Using Dr. Taguchi’s Tolerance De-sign of Experiment Approach” SAE Technical Paper 920763 (SAE SP-905).
16. Honda S. ”Rotational Vibration of a Helical Gear Pair with Modified Tooth Surfaces” JSME International Journal Series C, Vol.38 No. 1 1995.
17. Kawamoto S. et al. ”A Study on Gear Noise Reduction Based on Helical-Gear Tooth Accuracy” SAE Technical Paper 911943.

23
18. Borner J., Houser D. R. ”Friction and Bending Moments as Gear Noise Excitations” SAE Technical Paper 961816.
19. Smith J. D. ”Helical Gear Vibration Excitation with Misalignment” C08293 IMechE 1994.
20. Welbourn D. B. ”Fundamental Knowledge of Gear Noise – A Survey” Proc. Noise & Vib. Of Eng. and Trans., I Mech E., Cranfield, UK, July 1979, pp 9-14.
21. Opitz H., ”Noise of gears” Phil. Trans R. Soc., London Ser. A, Vol. 263 1968-9, pp 369-380.
22. Houser D. R. ”Research in the Gear Dynamics and Gear Noise Research Laboratory” SAE Technical Paper 821066.
23. Lorea A., Morra G., Ruspa G. ”Advanced Statistical Methods for the Correlation Be-tween Noise and Transmission Error in Gears” Fiat Research Center. (SAE Technical Pa-per 865144).
24. Iwase Y., Miyasaka K. ”Proposal of Modified Tooth Surface with Minimized Transmis-sion Error of Helical Gears” JSAE Review 17 (1996) pp 191-193.
25. Park C. ”The Load Transmission and Vibration Characteristics of Automobile Gear” SAE Technical Paper 932917.
26. Ehren H. P., Becker J. ”Auslegung von Toleranzfeldverschiebungen an einer Beispielver-zahnung” 36. Arbeitstagung Getriebe, WZL, Aachen, 1995.
27. Tavakoli M. S., Houser D. R. “Optimum Profile Modifications for the Minimization of Static Transmission Errors of Spur Gears” Journal of Mechanisms, Transmissions and Automation in Design Vol. 108 (March1986) pp 86 – 95.
28. Flodin A. “Wear of Spur and Helical Gears” Royal Institute of Technology, Stockholm, Doctoral Thesis, 2000.
29. Beuler E. ”Influences on the noise of transmissions” SAE technical paper 680051. DYNAMIC MODELS 30. Özguven H. N., Houser D. R. ”Mathematical Models used in Gear Dynamics – A Re-
view” Journal of sound and vibration (1988) 121(3), pp 383-411.
31. Cheng W., Wang Y. ”Simulation of the Stochastic Vibration of Spur Gears” International Conference on Computer Aided Production Engineering, Nov. 1988 Edinburgh.
32. Kahrmann A., Singh R. ”Non-Linear Dynamics of a Spur Gear Pair” Journal of sound and vibration (1990) 142(1), pp. 49-75.
33. Campell B. et al. ”Gear Noise Reduction of an Automatic Transmission Trough Finite Element Dynamic Simulation” SAE Technical Paper 971966.
34. Terauchi Y., Fujii M., Hoto H. ”Dynamic Behavior of Straight Bevel Gear” Bulletin of the JSME, Vol. 24, No. 188, February 1981, Paper No. 188-21.

24
35. Ariga K. et al. ”Reduction of Transaxle Gear Noise by Gear Train Modification” SAE Technical Paper 922108.
36. Donley M. G., Lim T. C., Steyer G. C. ”Dynamic Analysis of Automotive Gearing Sys-tems” SAE Technical paper 920762 (SAE SP-905).
37. Remmers P. ”The Dynamics of Automotive Rear Axle Gear Noise” SAE Technical Paper 710114.
38. Mitchell L. D. ”A Basic Approach to Gearbox Noise Prediction” SAE Technical paper 821065.
39. Masuda T., Abe T., Hattori K. ”Prediction Method of Gear Noise Considering the Influ-ence of the Tooth Flank Finishing Method” Journal of Vibration, Acoustics, Stress and Reliability in Design, Vol. 108, Jan. 1986 pp 95-100.
40. Hellinger W., Raffel H. Ch., Rainer G. Ph. “Numerical Methods to Calculate Gear Transmission Noise” SAE Technical paper 971965.
41. Nurhadi I. ”Investigation of the Influence of Gear System Parameters on Noise Genera-tion” The University of Wisconsin – Madison, Doctoral Thesis, 1985.
42. Ishida K., Matsuda T. ”Effect of Tooth Surface Roughness on Gear Noise and Gear Noise Transmitting Path” ASME Paper 80-C2/DET-70, 1980.
43. Drago R. J. ”How to Design Quiet Transmissions” Machine Design, Dec. 1980.
44. Zhou H., Kato M., Inoue K., Shibata K. “Influence of Bearing Positions on Sound Radia-tion of Single Stage Spur Gear System” JSME International Journal Series C, Vol. 40, No 1, 1997.
45. Runge H. “Resonanzgeräusche in Zahnradgetrieben” ATZ Automobiltechnische Zeit-schrift 98 (1996) 9, pp 448-450.
46. Joachim N., Stoffels H., Troska A. “Integrierte Berechnung zur Optimierung des Verzah-nungsgeräusches eines Pkw-Handschaltgetriebes” ATZ Automobiltechnische Zeit-schrift 103 (2001) 1, pp 16-23.
47. Torby B. “Spur-Gear Dynamics” TRITA-MMK 1995:13, ISSN 1400-1179, ISRN KTH/MMK/R-95/13-SE, Royal Institute of Technology, Stockholm 1995.
48. Abe E., Hagiwara H. ”Advanced Method for Reduction in Axle Gear Noise” SAE Tech-nical Paper 750150.

25
NOISE AND VIBRATION MEASUREMENT
49. Limmer J. D. ”Improved methods of vibration measurement, gear fault detection and bearing fault detection for gearbox diagnostics” Rensselaer Polytechnic Institute, Troy N. Y. Doctoral Thesis, 1997.
50. Middelton A. H. ”Noise Testing of Gearboxes and Transmissions Using Low Cost Digi-tal Analysis and Control Techniques” SAE Technical paper 861284.
51. Gielisch F., Heitmann F. T. ”Ermittlung der Geräuschanregung aus der Achsgetriebever-zahnung durch Prüfstandsversuche” ATZ Automobiltechnische Zeitschrift 100 (1998) 4, pp 282-286.
52. Oswald F. B. et al. “Influence of gear design on Gearbox Radiated Noise” Gear Technol-ogy, January / February 1998, pp 10-15.
53. Klein U., Stockmanns G. “Zeit-Frequenz-Verteilungen in der Maschinendiagnose” An-triebstechnik 38 (1999) 12, pp 59-64.