John Conway: Chinese Formula for Eternal Youth (PDF) Finbarr

A Newton-Raphson approach to the computation of ML reconstructions is developed. This method offers rapid quadratic convergence. The implementation is carried out in the image domain and takes full advantage of the Fourier structure of the Radon transform. A blurred version of the raw FBP reconstruction is used as pseudo-data. The has potential for further refinement in which only the least squares misfit between the FBP pseudo-data and the blurred signal is considered. This could have potential in other contexts as well – e.g. SPECT[3]. The reduction to least squares might not unexpected since there is no asymptotic MSE inefficiency associated with the use of least squares in comparison to maximum likelihood. The potential to largely circumvent the iterative projection and back-projection steps required by OSEM type approaches is a significant step. The method allows rapid computation of raw ML solutions and is readily adapted to allow positivity constrained post-processing of standard FBP reconstructions (FPB+) in a small number of iterations.
Maximum likelihood reconstruction for PET involves the optimization of a highly non-separable convex objective function. Standard iterative OSEM methods for PET reconstruction are based on work of Shepp and Vardi[1] and Hudson and Larkin[2]. Corresponding developments for SPECT reconstruction are also available[3]. Although OSEM has lead to operationally feasible implementations of ML reconstruction, poor convergence and sensitivity to starting guesses are not uncommon. This is a particular issue for low count reconstructions such as individual time frames of a PET dynamic study, where adequate temporal resolution requires under-smoothing. We have been examining direct Newton-Raphson type alternatives to evaluation of ML reconstruction. Given the convex structure of the problem, Newton-based methods have the potential to achieve rapid quadratic convergence. Our approach involves construction of a quadratic approximation to the ML objective function with a matrix-splitting algorithm involving overlapping grids being used to solve the resulting quadratic programming sub-problems.
METHODS AND IRESULTS
DISCUSSION
INTRODUCTION
A Multi-grid Approach to ML Reconstruction in PET: A Fast Alternative to EM-Based Techniques.
1Mathematical Sciences, University College Cork, Ireland. 2Physical Chemistry, University of California, Berkeley, CA, USA.
Finbarr O'Sullivan1 and Liam O'Suilleabhain1,2
- SFI 11/PI/1027 - NIH P01 CA42045
SUPPORT [1] Shepp LA and Vardi Y 1982 Maximum likelihood reconstruc=on for emission tomography IEEE Trans. Med.Img. 1 113–22. [2] Hudson HM and Larkin RS 1994. Accelerated image reconstruc=on using ordered subsets of projec=on data IEEE Trans. Med. Img. 13 601–9 [3] Branderhorst W, et al. 2010. Pixel-‐based subsets for rapid mul=-‐pinhole SPECT reconstruc=on Phys. Med. Biol. 55 2023–2034. [4] Carson RE et al. 1993. An approximation formula for PET region-of-interest values. IEEE Trans. Med. Img. 12 240-‐51601–9 12, 240—251. [5] Maitra R and O’Sullivan F 1998. Variability Assessment in PET and Related Generalized Deconvolution Problems. JASA.93:1340-1356. [6] Hageman LA and Young DM 2004. Applied Iterative Methods. Dover Books on Mathematics.
REFERENCES
Finbarr O’Sullivan ([email protected]) School of Mathematical Sciences UCC, Cork.
CONTACT
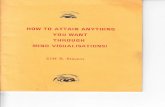
Figure 1. (Top) Sample Raw (no smoothing) PET Reconstructions for Simulated Shepp Phanom. (Middle) Operational FPB reconstructions for sample time- fames in a dynamic H2O study – FWHM 6mm. (Bottom) Post-Processed FBP (FBP+) reconstructions using quadratic criterion. Average of 10-15 iterations for raw reconstructions; 5-6 iterations for operational data. KKT criterion used for convergence.
2-D
The ML Objective Function
Quadratic Approximation not involving Projection
Matrix Splitting (aka Hildreth, Gauss-Seidel) with Multiple Grids
3-D
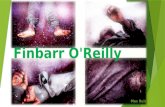
0.6 0.8 1.0 1.2 1.4
02
46
Rate of Convergence
Degree of Ill-Conditioning
-log(S(G))
No Grid Overlap
Grid Overlap Overlapping Grids
Blue: Forward Recursion Red : Backwards Recursion
Worst Case Convergence
A Block Iterative Method for Positivity Constrained Least Squares
Reconstruction of PET Data
October 19, 2013
1 Poster Eqns
The unknown source distribution is � where
Eyj = aj [K�]j = µj and V yj = ⇥2µj
where aj > 0’s are known (attenuation) factors and ⇥2 is an unknown constant.
Let yj represent detected counts and let � is the target source. Ka = AKwith A the set of attenuation factors and K is the Radon transform.
⇤(�) =MX
j=1
[Ka�]j � yjlog([Ka�]j)
With wj = [Ka�0]
�1,
⇤(�) ⇤MX
j=1
wj(yj � [Ka�]j)2
= (z� �)⌅[K ⌅aWKa](z� �)
⇤ (
z� �
d
)
⌅[K ⌅K](
z� �
d
)
=
NX
i=1
(y
di � [ ⇥ ✓]i)2 = L(✓)
�i = ✓idi, yd = ⇥ ⇥ z/d with z the FBP reconstruction and d its point-wisestandard deviation [4,5]. is the convolution kernel corresponding to theToeplitz matrix [K ⌅K]
12 , i.e. ⇥ ✓ = [K ⌅K]
12✓.
1
A Block Iterative Method for Positivity Constrained Least Squares
Reconstruction of PET Data
October 19, 2013
1 Poster Eqns
The unknown source distribution is � where
Eyj = aj [K�]j = µj and V yj = ⇥2µj
where aj > 0’s are known (attenuation) factors and ⇥2 is an unknown constant.
Let yj represent detected counts and let � is the target source. Ka = AKwith A the set of attenuation factors and K is the Radon transform.
⇤(�) =MX
j=1
[Ka�]j � yjlog([Ka�]j)
With wj = [Ka�0]
�1,
⇤(�) ⇤MX
j=1
wj(yj � [Ka�]j)2
= (z� �)⌅[K ⌅aWKa](z� �)
⇤ (
z� �
d
)
⌅[K ⌅K](
z� �
d
)
=
NX
i=1
(y
di � [ ⇥ ✓]i)2 = L(✓)
�i = ✓idi, yd = ⇥ ⇥ z/d with z the FBP reconstruction and d its point-wisestandard deviation [4,5]. is the convolution kernel corresponding to theToeplitz matrix [K ⌅K]
12 , i.e. ⇥ ✓ = [K ⌅K]
12✓.
1
A Block Iterative Method for Positivity Constrained Least Squares
Reconstruction of PET Data
October 19, 2013
1 Poster Eqns
The unknown source distribution is � where
Eyj = aj [K�]j = µj and V yj = ⇥2µj
where aj > 0’s are known (attenuation) factors and ⇥2 is an unknown constant.
Let yj represent detected counts and let � is the target source. Ka = AKwith A the set of attenuation factors and K is the Radon transform.
⇤(�) =MX
j=1
[Ka�]j � yjlog([Ka�]j)
With wj = [Ka�0]
�1,
⇤(�) ⇤MX
j=1
wj(yj � [Ka�]j)2
= (z� �)⌅[K ⌅aWKa](z� �)
⇤ (
z� �
d
)
⌅[K ⌅K](
z� �
d
)
=
NX
i=1
(y
di � [ ⇥ ✓]i)2 = L(✓)
�i = ✓idi, yd = ⇥ ⇥ z/d with z the FBP reconstruction and d its point-wisestandard deviation [4,5]. is the convolution kernel corresponding to theToeplitz matrix [K ⌅K]
12 , i.e. ⇥ ✓ = [K ⌅K]
12✓.
1
A Block Iterative Method for Positivity Constrained Least Squares
Reconstruction of PET Data
October 19, 2013
1 Poster Eqns
The unknown source distribution is � where
Eyj = aj [K�]j = µj and V yj = ⇥2µj
where aj > 0’s are known (attenuation) factors and ⇥2 is an unknown constant.
Let yj represent detected counts and let ⇤ is the target source. Ka = AKwith A the set of attenuation factors and K is the Radon transform.
⇤(⇤) =MX
j=1
[Ka⇤]j � yjlog([Ka⇤]j)
With wj = [Ka�0]
�1,
⇤(⇤) ⇤MX
j=1
wj(yj � [Ka⇤]j)2
= (z� ⇤)⌅[K ⌅aWKa](z� ⇤) ⇤ (
z� ⇤
d
)
⌅[K ⌅K](
z� ⇤
d
)
=
NX
i=1
(y
di � [⇥ ⇥ �]i)2 = L(�)
⇤i = �idi, yd = ⇥ ⇥ z/d with z the FBP reconstruction and d its point-wisestandard deviation [4,5]. ⇥ is the convolution kernel corresponding to theToeplitz matrix [K ⌅K]
12 , i.e. ⇥ ⇥ � = [K ⌅K]
12�.
1
Figure 2: (Right) Overlapping blue and red grids used in Matrix splitting. (Left) Linear rate of convergence analysis c.f. [6] for the iteration with (black and red lines) and without (blue line) grid overlap. Analysis considers 1-D Abel transform. Values matched to the 2-D and 3-D Radon transform are indicated.
2
� is split into a set of K grid-blocks each with n-voxels. Two sets of blocks,defined by over-lapping blue and red grids, are employed - see Figure 2.
PB� = (⇤1,⇤2, . . . ,⇤K)⇤ = ⇥ ; PR� = (⇤1,⇤2, . . . ,⇤K)
⇤ = ⇥
Iterates �(l) for l = 0, 1, 2, . . .. are involve two passes for blue and red grids.
Blue update: ⇥(l+1) = P�1B ⇥(l+1) with ⇤(l+1)
k = ⇤(l)k + �k and �k minimizing
fB(�) = LB(⇤(l+1)1 , . . . ,⇤(l+1)
k�1 ,⇤(l)k + �,⇤(l)
k+1, . . . ,⇤(l)K )
= �⇤A� � 2b⇤k�
subject to � ⇥ �⇤(l)k for k = 1, 2, . . . , K and LB(⇥) = L(P�1
B �).
A similar updating procedure is used for red blocks. The choice of blocksensures the there is a common A-matrix in the blue and red updating.
Shepp-‐Phantom
Dynamic 15O H2O Chest Study
Coarse Grid ML FBP
FBP FBP FBP FBP
FBP+ FBP+ FBP+ FBP+
Dynamic 15O H2O Chest Study
RV-‐Heart
Injec=on Site
4-‐6 second frame
4-‐6 second frame
12-‐14 second frame
12-‐14 second frame 20-‐22 second frame 65-‐70 second frame
65-‐70 second frame 20-‐22 second frame