
EuropeanCivilUnmannedAirVehicleRoadmap3 (8.5M)
192
25 Nations for an Aerospace Breakthrough European Civil Unmanned Air Vehicle Roadmap VOLUME 3 – STRATEGIC RESEARCH AGENDA SUBMITTED ON BEHALF OF THE EUROPEAN CIVIL UAV FP5 R&D PROGRAM MEMBERS: Italy Germany Italy Italy Israel U.K. Italy Czech Rep. Italy France Italy Italy Germany Italy Sweden France France Spain Italy Israel Poland Israel Lithuania France Israel Belgium France Hungary Poland Sweden Germany Mark Okrent UAVNET Coordinator WWW.UAVNET.COM Netherlands SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 1 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
Transcript of EuropeanCivilUnmannedAirVehicleRoadmap3 (8.5M)

25 Nations for an Aerospace Breakthrough
European Civil Unmanned Air Vehicle Roadmap
VOLUME 3 – STRATEGIC RESEARCH AGENDA SUBMITTED ON BEHALF OF THE EUROPEAN CIVIL UAV FP5 R&D PROGRAM MEMBERS:
Italy
Germany Italy
Italy
Israel
U.K.
Italy Czech Rep.
Italy
France
Italy
Italy
Germany
Italy
Sweden
France
France
Spain
Italy
Israel
Poland
Israel
Lithuania
France
Israel
Belgium
France
Hungary Poland
Sweden
Germany
Mark Okrent UAVNET Coordinator WWW.UAVNET.COM
Netherlands
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 1 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Foreword to Volume 3
The European Civil Unmanned Air Vehicle Roadmap Volume 1 was released in March 2005 and
may be viewed as the introduction to Volumes 2 and 3.
In this volume, the focal point is on the technologies and applications of civil UAVs. It discusses the
Strategic Research Agenda of The Civil Unmanned Air Vehicles Roadmap, which was prepared as
a Pan-European effort in order to benefit Europe strategically, socially, economically and
technologically.
Here, the need for civil UAVs and their applications are introduced together with the technologies
involved. The foundations for the business case is also prepared and presented giving the market’s
financial perspective to this technology. This will allow the reader to obtain a deeper understanding
of the subject, its necessity and its impact on society and the economy. In addition, one will readily
appreciate how the Civil UAV Roadmap falls in line with the European Strategic Initiative
STAR21and VISION 2020.
Civil UAVs were initially treated as a distant technology, but as time races forwards civil UAVs have
come into range and have moved to the centre stage. In fact, their technological concepts are being
applied to air transport transforming these aircrafts into autonomous machines. Europe is investing
in the IFATS project, which is studying the requirements for unmanned air transport. It is with this in
mind that this document should be read.
Civil UAVs are an exciting growth industry that involves domains from psychology and sociology in
the realm of humanities through to engineering disciplines across the spectrum. The subject matter
touches all of society and encompasses global issues as well. Europe needs the technologies
involved in civil UAVs to strengthen its knowledgebased economy and to move forwards.
The value aspect is critical when looking at civil UAVs and civil UAVs should not be examined for
the power of the technology itself, but rather to the application of the technology on the potential
user’s value system. The applications for civil UAVs are numerous and increasing, as more people
are exposed to their potential. There are very few civil UAVs being used today; most are
adaptations of military systems or specialised one off systems.
Some of the civil UAVs applications may not be feasible with today’s technologies. However, the
need remains and technologies to meet the challenges will be found if investment is made
available.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 2 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
The European Civil Unmanned Aerial Vehicle Roadmap comes to lead the way to this new growth
area, re-enforcing and widening Europe’s knowledge-based economy providing an added
advantage.
The time has come when civil UAVs are designed, built and used in a similar fashion to aircraft.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 3 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Executive Summary
The European Civil Unmanned Aerial Vehicle Roadmap is the result of very intensive work carried
out by 32 dedicated organisations representing Europe’s finest industries, research institutes,
universities and SMEs, and includes the work carried out by CAPECON and USICO, with
information gathered from a wide range of expert sources in UAVNET. The European Civil
Unmanned Aerial Vehicle (UAV) Roadmap covers all types of civil UAVs and their contributions to
society.
By adopting the European Civil Unmanned Aerial Vehicle Roadmap, Europe will position itself
centre-stage influencing the technologies for generations to come. Furthermore, SMEs will have an
opportunity to enter this exciting market and flourish with innovative designs and disruptive
technologies. Europe will stop the Brain Drain in the fields related to aeronautics and related supply
chains.
The civil UAV roadmap presented in this document relates to the European Roadmap for Research
Infrastructures (ESFRI) roadmap, mentioned in Ref. [ 17]. Therein, it was stated that, “In the context
of the ESFRI roadmap, the term research infrastructures refers to facilities that provide essential
services to the scientific community for basic or applied research”.
European Commissioner for Science and Research Janez Potocnik said, when commenting on the economy: “We must heed this wake-up call. If the current trends continue, Europe will lose the opportunity to become a leading global knowledge-based economy.”
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 4 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
The document is structured as follows:
Section 1 - is a primer describing the definitions and technical system explanation of civil
UAVs. This section includes the categories and the technical terminology
used in the world of civil UAVs.
Section 2 - describes the essential purpose of civil UAVs and the expected benefits.
Here, the different applications are portrayed with their advantages over
current systems.
Section 3 - informs the reader of the groundbreaking projects, that were funded by the
EC, which laid the foundations of civil UAVs of today.
Section 4 - briefly describes the market research for civil UAVs that was carried out by
Frost & Sullivan especially prepared for this Roadmap document.
Section 5 - demonstrates the business case and economics behind the use of civil UAVs.
Section 6 - describes what Europe has to gain by adopting the Civil UAV Roadmap.
Sections with a glossary of terms, references and an index follow.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 5 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Table of Contents
1 CIVIL UNMANNED AIR VEHICLES - TECHNICAL BACKGROUND............................13 1.1 A SYSTEMS APPROACH.............................................................................................................13 1.2 CIVIL MICRO-MINI UAVS PARTICULARITY...................................................................................18 1.3 CIVIL MINI-SMALL UAVS PARTICULARITY ..................................................................................19 1.4 CIVIL MALE UAVS PARTICULARITY...........................................................................................20 1.5 CIVIL HALE UAVS SYSTEM PARTICULARITY..............................................................................20 1.6 AIRSPACE CATEGORISATION .....................................................................................................20
2 THE NEEDS FOR CIVIL UAVS AND THEIR BENEFITS ..............................................23 2.1 BACKGROUND ...........................................................................................................................23 2.2 PRESENT APPLICATIONS............................................................................................................34
2.2.1 Present Law Enforcement Applications.............................................................................................34 2.2.2 A Civil UAV Looks inside Volcanic Craters........................................................................................35 2.2.3 Present Agricultural Applications.......................................................................................................35
2.3 FUTURE APPLICATIONS..............................................................................................................36 2.3.1 Satellite Complement.........................................................................................................................37 2.3.2 Navigational Aids ...............................................................................................................................41 2.3.3 Telecommunications..........................................................................................................................42 2.3.4 GMES ................................................................................................................................................47 2.3.5 Scientific and Earth Observation .......................................................................................................48 2.3.6 Mineral Exploration ............................................................................................................................62 2.3.7 Agriculture, Forestry & Fisheries .......................................................................................................63 2.3.8 Surveillance & Security......................................................................................................................66 2.3.9 Civil UAVs as Nature’s Utensil - Wildlife & Nature ............................................................................82 2.3.10 Other Commercial Applications .........................................................................................................82 2.3.11 Civil UAV Transport Aircraft...............................................................................................................83
3 FOUNDATIONS OF EUROPEAN CIVIL UAVS .............................................................86 3.1 THE CAPECON PROJECT............................................................................................................87 3.2 USICO......................................................................................................................................94 3.3 UAVNET ..................................................................................................................................98 3.4 HELIPLAT ................................................................................................................................100 3.5 FP5 FUNDED CIVIL UAV PROJECTS KEY FINDINGS..................................................................102
3.5.1 USICO’s key findings.......................................................................................................................102 3.5.2 CAPECON’s Key Findings...............................................................................................................102 3.5.3 UAVNET’s Key Findings..................................................................................................................102
4 MARKET SURVEY - ACHIEVING OPERATIONAL CIVIL UAV SYSTEMS................104 4.1 TOTAL MARKET DEMAND ANALYSIS.........................................................................................104
4.1.1 Introduction ......................................................................................................................................104 4.1.2 Methodology ....................................................................................................................................104 4.1.3 Market Drivers .................................................................................................................................105 4.1.4 Market Restraints.............................................................................................................................107 4.1.5 Market Challenges...........................................................................................................................110 4.1.6 Quantifying the Market.....................................................................................................................112
4.2 CRITICAL FOCUS: OPERATING UAVS IN CIVILIAN AIRSPACE: CURRENT AND FUTURE OPTIONS.114 4.2.1 Introduction ......................................................................................................................................114
4.3 OPERATIONAL REQUIREMENTS ................................................................................................115 4.3.1 Situational awareness......................................................................................................................115
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 6 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
4.3.2 See & Avoid .....................................................................................................................................116 4.3.3 Realistic options – Technological Solutions ....................................................................................116 4.3.4 Situational Awareness .....................................................................................................................116 4.3.5 See & Avoid .....................................................................................................................................117
4.4 CRITICAL FOCUS: KEY END MARKETS .....................................................................................118 4.4.1 Forest and Forest Fire Management ...............................................................................................118 4.4.2 Border Patrol....................................................................................................................................121 4.4.3 Maritime Surveillance ......................................................................................................................124 4.4.4 Law Enforcement.............................................................................................................................127 4.4.5 Communications ..............................................................................................................................130 4.4.6 Earth Observation............................................................................................................................135 4.4.7 Pipeline Observation........................................................................................................................139 4.4.8 Powerline Maintenance ...................................................................................................................142
5 CIVIL UNMANNED VEHICLE – BUSINESS CASE EXAMPLES ................................146 5.1 ASSUMPTIONS USED................................................................................................................147 5.2 BUSINESS CASE 1 - EMERGENCIES - FOREST FIRE...................................................................154 5.3 BUSINESS CASE 2 - COMMUNICATION RELAYS.........................................................................161 5.4 BUSINESS CASE 3 – PIPELINE MONITORING.............................................................................162 5.5 SOUND TECHNOLOGICAL BASE................................................................................................165
6 EUROPEAN OPPORTUNITIES AND CONSEQUENCES ...........................................166 6.1 EUROPEAN OPPORTUNITIES.....................................................................................................169
7 GLOSSARY OF TERMS ..............................................................................................172
8 REFERENCES .............................................................................................................177
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 7 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
List of Figures
Figure 1-1 Telecommunications Options ..............................................................................................................13
Figure 1-2 Civil UAV Categories ...........................................................................................................................15
Figure 1-3 Trend Lines for Payload versus Maximum Takeoff Weight (MTOW) Rotary UAVs............................16
Figure 1-4 Minimum Civil UAV System Components ...........................................................................................17
Figure 1-5 System Out - Pollution Map.................................................................................................................18
Figure 1-6 Seiko Epson Corp. Micro-Rotary UAV .................................................................................................19
Figure 1-7 DARPA Airborne Communications Node ............................................................................................19
Figure 1-8 Possible Mini-Small Civil UAV on a Vineyard Mapping Application ....................................................19
Figure 1-9 Airspace Classifications, & example of a Flight Corridor through Class B Airspace...........................22
Figure 2-1 Relationship of Technologies & Market Forces...................................................................................24
Figure 2-2 Civil UAV Innovation Goals..................................................................................................................24
Figure 2-3 Model of Knowledge-Based Economy.................................................................................................28
Figure 2-4 Projected Civil UAVs Applications and Benefits ..................................................................................29
Figure 2-5 Civil Unmanned Air Vehicle – Natural Continuation to Hi-Tech Air Transport ....................................30
Figure 2-6 Investment in Research & Development - see Ref. [ 14] .....................................................................30
Figure 2-7 Present Strengths & Weaknesses of Current Civil UAV Technologies ...............................................34
Figure 2-8 Kauai Coffee Plantation - Composite of High Resolution Visible Imagery ..........................................36
Figure 2-9 Kauai Coffee Plantation – Ripeness Mapping Correlation ..................................................................36
Figure 2-10 The Atmospheric Model.....................................................................................................................38
Figure 2-11 Snapshot of Geostationary Satellites around the Equator ................................................................39
Figure 2-12 Estimated Flight Hour Cost – HALE ..................................................................................................40
Figure 2-13 Spacecraft Cost-Per-Operational Day As A Function Of The Design Lifetime .................................40
Figure 2-14 Satellite - Civil HALE UAV - Earth Relay ...........................................................................................41
Figure 2-15 ESA Space Weather Programme Study Market Analysis .................................................................42
Figure 2-16 Lower Altitude to Monitor Earth - Avoids Space to Earth Atmospheric Distortion.............................43
Figure 2-17 HALE - Stationary High Altitude Relay Platform Concept .................................................................44
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 8 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Figure 2-18 Examples of LTA’s - High Altitude Platform Station ..........................................................................44
Figure 2-19 Alternative Telecommunication Link to Underwater Cables..............................................................47
Figure 2-20 Required Atmospheric Soundings Above Europe .............................................................................50
Figure 2-21 Example of an Atmospheric Model....................................................................................................51
Figure 2-22 Weather Data and Information Critical to Realizing Other Societal Benefits ....................................52
Figure 2-23 Data from NASA’s Crystal-Face Project............................................................................................53
Figure 2-24 Understanding of Atmospheric Variables ..........................................................................................54
Figure 2-25 Growth Rates Monitored On The Nafanua Undersea Volcano .........................................................55
Figure 2-26 Chemical Pollution in Europe ............................................................................................................58
Figure 2-27 A European Pollution Map & Acid Rain Risk Areas ..........................................................................58
Figure 2-28 Current European Nuclear Power Stations & Contamination from Chernobyl..................................59
Figure 2-29 Oil at Sea The Efforts Involved..........................................................................................................60
Figure 2-30 Geographical location of the Arno River Basin (Landsat TM7 RGB 457 composite)........................61
Figure 2-31 Landslides in Tuscany – INSAR Enables Ground Movement Detection...........................................61
Figure 2-32 1997 Northwest Australia...................................................................................................................63
Figure 2-33 Visual, Infra-red and Multi-Spectral Agricultural Monitoring ..............................................................64
Figure 2-34 Security Assessment - Most Probable Threats .................................................................................66
Figure 2-35 Expected Casualty and Economic Impact .........................................................................................66
Figure 2-36 Potential Prevention Capabilities by Class of UAVs..........................................................................67
Figure 2-37 Potential Response Capabilities by Class of UAVs...........................................................................67
Figure 2-38 Border Patrol Agent Escorting Illegal Aliens......................................................................................68
Figure 2-39 Monitoring Sea Approaches ..............................................................................................................68
Figure 2-40 Real-time Car Park and Traffic Monitoring ........................................................................................70
Figure 2-41 Flexibility Provided by Civil UAVs for Monitoring Critical Infrastructures ..........................................72
Figure 2-42 Europe’s Pipeline with Identification of objects near a pipeline track................................................76
Figure 2-43 Underground Pipeline Leaks in the southwestern United States ......................................................77
Figure 2-44 Power Line Monitoring – Associated Challenges ..............................................................................78
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 9 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Figure 2-45 Forest Saved by using Civil UAVs to Aid Commander of Fire Fighting Team ..................................79
Figure 2-46 Comparison of Fire Monitoring ..........................................................................................................80
Figure 2-47 Flooding In Europe ............................................................................................................................81
Figure 2-48 Delineation of Inundation Maps via Satellite Images.........................................................................81
Figure 2-49 Required Inundation Maps Made Possible by Civil UAVs.................................................................81
Figure 2-50 Revenue Ton-miles for Large Air Carriers - Air Cargo - Fiscal Years 2003-2014.............................84
Figure 2-51 IFATS Concept for Autonomous Aircraft ...........................................................................................85
Figure 3-1 Closed Loop Dilemma of the Three Principle Stakeholders of Civil UAVs..........................................87
Figure 3-2 CAPECON Feasibility Ground Rules...................................................................................................88
Figure 3-3 CAPECON UAV Research Domains...................................................................................................89
Figure 3-4 CAPECON - Modular HALE Civil UAV Design....................................................................................90
Figure 3-5 Capecon - Solar HALE Civil UAV Design............................................................................................90
Figure 3-6 Capecon – Blended Wing-Body HALE Civil UAV Design 1 ................................................................91
Figure 3-7 Capecon – Blended Wing-Body HALE Civil UAV Design 2 ................................................................91
Figure 3-8 Capecon – MALE Civil UAV Diesel Supercharged Engine Configuration Design 1 ...........................92
Figure 3-9 Capecon – MALE Civil UAV Turbo-Engine Configuration Design 2....................................................92
Figure 3-10 Capecon – Single Rotor Civil UAV ....................................................................................................93
Figure 3-11 Capecon – Coaxial Rotary Civil UAV ................................................................................................93
Figure 3-12 USICO Typical HALE Civil UAV Operational Flight...........................................................................95
Figure 3-13 USICO – Modelling Collision Avoidance Scenarios Overview ..........................................................96
Figure 3-14 USICO – ATM and Operations Simulator Configured for UAV Trials ...............................................97
Figure 3-15 USICO – Collision Avoidance Scenarios Example............................................................................97
Figure 3-16 USICO – ATC Display Scenarios of Simulated Air Traffic with Civil UAV.........................................98
Figure 3-17 UAVNET Workshops .......................................................................................................................100
Figure 3-18 Heliplat Configuration ......................................................................................................................101
Figure 4-1 The Total Market for Civil and Commercial UAV Markets in Europe, 2006-2015 .............................112
Figure 4-2 The Total Market Shares for Civil and Commercial UAV Markets in Europe, 2006-2015.................114
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 10 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Figure 4-3 The Total Market for Forest Fire Management UAVs in Europe, 2006-2015....................................121
Figure 4-4 The Total Market for Border Patrol UAVs in Europe, 2006-2015......................................................124
Figure 4-5 The Total Market for Maritime Surveillance UAVs in Europe, 2006-2015.........................................127
Figure 4-6The Total Market for Law Enforcement UAVs in Europe, 2006-2015 ................................................130
Figure 4-7 The Total Market for Communications UAVs in Europe, 2006-2015 ................................................135
Figure 4-8 The Total Market for Earth Observation UAVs in Europe, 2006-2015 ..............................................139
Figure 4-9The Total Market for Pipeline Monitoring UAVs in Europe, 2006-2015 .............................................141
Figure 4-10The Total Market for Powerline Maintenance UAVs in Europe, 2006-2015.....................................145
Figure 5-1 Approach to Civil UAV Induction .......................................................................................................146
Figure 5-2 Civil UAV Cost Comparison with Manned Aircraft.............................................................................152
Figure 5-3 Area of Forest Lost Due to Fire as a Function of Time & Actual Areas ............................................156
Figure 5-4 Forest Fire In Portugal Summer 2005 - 180 000 Hectares - See Ref. [ 95] .......................................157
Figure 5-5 Coverage Comparison Between Civil UAV and Pylon-Mounted Cameras .......................................158
Figure 5-6 Northern Hungarian Border Map .......................................................................................................158
Figure 5-7 Coverage of the UK with a network of HAPs.....................................................................................162
Figure 5-8 Relative Cost For Pipeline Monitoring - Remote Sensing .................................................................164
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 11 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
List of Tables
Table 2-1 Basic Characteristics of Terrestrial Wireless, Satellite, and HAPs Systems ........................................45
Table 2-2 Relative Importance - Illustrative List of Earth Observations & Societal Benefit Areas........................49
Table 2-3 Summary of Causes and Spilled Volumes for 2003 incidents..............................................................72
Table 4-1 Civil and Commercial UAV Markets: Market Drivers (Europe), 2006 - 2015......................................105
Table 4-2 Civil and Commercial UAV Markets: Market Restraints (Europe), 2006 - 2015.................................107
Table 4-3 Civil and Commercial UAV Markets: Market Challenges (Europe), 2006 - 2015 ...............................110
Table 4-4 The Total Market for Civil and Commercial UAV Markets in Europe, 2006-2015 ..............................113
Table 4-5 Civil and Commercial UAV Markets in Europe, 2006-2015................................................................113
Table 5-1 Civil UAV Remote Sensing Technologies - Benefits and Drawbacks ................................................147
Table 5-2 Pylon Mounted vs. Civil UAV Fire Monitoring Systems ......................................................................159
Table 6-1 Opportunities and Threats – Focused on Direct Effects.....................................................................166
Table 6-2 Expected Spin-off Opportunities .........................................................................................................169
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 12 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
1 CIVIL UNMANNED AIR VEHICLES - TECHNICAL BACKGROUND
1.1 A SYSTEMS APPROACH
UAV is an acronym for an unmanned/uninhabited air/aerial vehicle. The UAV is an aircraft that can be1 autonomous or when necessary, effectively controlled by persons on the ground should there be an emergency.
Civil UAV systems are synonymous with:
Remote sensing Airborne communications relay stations Air transport platforms
A civil UAV is inherently very flexible compared to manned aircraft and satellite systems. It can
carry out what is termed D3 tasks, which are Dull, Dangerous and Dirty. The civil UAV can stay at
remote locations for extended periods and when combined with the required payload can provide
an extremely efficient aerial sensing platform. Since these civil UAVs are built with the future in
mind, they will easily allow payload changes permitting the latest remote sensing technologies to be
rapidly exchanged. The civil UAV offers a very effective on site data acquisition system providing
high sensitivity and accurate measurements. These technologies will readily allow observation of
slow moving objects, for example measuring land slippage, and will offer high repeatability.
Civil UAVs also offer the possibility of serving as airborne communication relay stations filling a
niche area presently open. Much work on communications using future high altitude UAVs has
been carried out and is still ongoing. The vision for this niche opportunity is best illustrated in Figure
1-1.
FIGURE 1-1 TELECOMMUNICATIONS OPTIONS
1 Fully autonomous includes takeoff, flight path implementation and landing.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 13 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
In addition to remote sensing and communications relays, civil UAVs are also proposed to carry
cargo. Research and development for this application has already begun indirectly in Europe with
the EC funded IFATS project and directly in the U.S. at George Mason University Virginia in
conjunction with the FAA using remotely operated Cessna Caravan aircraft.
On the technical side, the UAV system can be characterized by an air system and a ground system,
interconnected by data links, control links, and integrated into a technical and decision-making
environment. A UAV system includes several sub-systems integrated to fulfil a given application or
mission and is comprised of the following sub-systems – see Figure 1-4:
The air system:
The unmanned air vehicle – sometimes referred to as the platform, since it carries the payload
The payload(s) – which are the sensors that provide the required remotely sensed data, relay communication equipment or cargo
The ground system:
The ground stations – which includes the civil UAV control station and the data application station, that may be situated in the same physical location or in separate locations
1. The control station is used by the UAV operator for command and control of the UAV when required
2. The application station is used for reception of data obtained by the payloads and its analysis – it may be situated remotely and independently of the control station
3. Communication relay stations to transmit and receive data between the air and ground segments
4. Interface equipment to allow connection to other systems, where required for operations and support
Interface with the ATC/ATM2 for MALE (Medium Altitude with/without Long Endurance) and HALE (High Altitude with Long Endurance) UAVs
Communication links – control & data links between the air segment and the ground segment; communications links3 that connect both segments by direct line of sight or via a relay: an up link for the remote control of the air segment, and down link for telemetries providing the status of the air segment and data collected by the payload(s)
The UAV system is reusable, fully autonomous, pre-programmed or remotely piloted (or even both)
2 Air Traffic Control/Air Traffic Management system 3 Up link is the communication from the ground station to the air vehicle, and down link is the communication from the air vehicle to the
ground station
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 14 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
from the ground, from an air platform or from a naval platform, as necessary.
Civil UAVs are also categorised as a function of weight and operational altitude – see Figure 1-2 for
an overview, and are usually grouped into the following four main categories as defined below:
Micro-mini - less than 7kg in weight with flight altitude below 400ft and can also be flown indoors.
Mini-small - weight range of 8 – 400 kg with flight altitude 300 – 4000 ft, range below 500m, Visual Flight Rules (VFR).
Rotary - Rotary UAV configurations are characterized mainly by their ability to vertically take-off and land, and their hovering capability. The two main categories of Rotary UAV configurations are: a single main rotor and a co-axial rotor configuration, a third type is the tilt rotor; an example is the U.S. Navy Eagle Eye – see Figure 1-3.
Single Main Rotor - is the conventional helicopter configuration with known and proven technology and therefore relatively low cost both in development and maintenance.
Co-axial Rotor - is more complex and challenging for small rotorcraft, but has performance advantages over the conventional single main rotor configuration.
MALE - weight range of 400 – 4000 kg with flight altitude 15000 - 45000 ft, range above 500m, VFR. These UAVs once equipped with appropriate sensors can more efficiently replace human pilots flying similar applications
HALE - High Altitude Long Endurance, with flight altitude > 45000 ft
FIGURE 1-2 CIVIL UAV CATEGORIES
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 15 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
FIGURE 1-3 TREND LINES FOR PAYLOAD VERSUS MAXIMUM TAKEOFF WEIGHT (MTOW) ROTARY UAVS
Early UAVs were military remotely piloted vehicles (RPVs) that were completely manually
controlled. With the advance of computer technologies and control engineering, more stabilisation
was added to the RPV. However, it was found that human error was the major factor for RPV loss
and a major effort to remedy this was undertaken. More autonomy was added to the RPV, which
then received Unmanned Air Vehicle (UAV) as its descriptive name. Since then, a great deal of
autonomy has been added to the UAVs albeit military, with human intervention only when serious
system malfunction occurs. The manual control option is always available for safety and backup
reasons.
In order to understand the different roles that civil UAVs can play, an appreciation of the source of
the definitions is needed.
Each category is designed for a defined environment and a set of applications and with the
appropriate types of payloads.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 16 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
FIGURE 1-4 MINIMUM CIVIL UAV SYSTEM COMPONENTS4
In order to better visualise and understand the civil UAV system, an example of a customer
requiring a pollution map of Europe is described graphically in Figure 1-5. The requirement is the
system input and the pollution map is the system output.
All civil UAV systems have the same basic components, where the major differences are described
in the following sections.
A typical sequence of steps for civil UAV operation from the very beginning will usually include the
following:
Synchronisation with the ATC of civil UAV planned activities
Pre-flight preparation – entry of the required flight path (ATC permission assumed to be granted)
Takeoff/launch of the civil UAV and consequent flight to the area of interest
Remote sensing - image detection and transmission to the data application/ground station or both
Automatic or manual image processing at the data application /ground station or both
Object identification and auto-tracking
Transmission of relevant information to “customer5” – the system output
Follow-up activities as required
Civil UAV landing
4 The customer is the body that requires the information – emergency services, scientists, law enforcement services are typical
customers, but to name a few 5 Note: the ground station and data application station may be integrated into one unit.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 17 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
FIGURE 1-5 SYSTEM OUT - POLLUTION MAP
1.2 CIVIL MICRO-MINI UAVS PARTICULARITY
Their uniqueness is their particularity. A micro/mini UAV is one that weighs less than 7 kilograms
and flies below 400 feet. Dimensions vary according to application. Presently, these micro/mini
UAVs may not have a particular application, but as their availability increases, there will be
customers for these technologies. They are to be easily deployable and retrievable.
Seiko Epson Corp. is presently developing an example of a micro-rotary UAV, which was revealed
at a Japanese trade show recently – see Figure 1-6. The Micro UAV weighs just 0.35 ounces and is
only 2.8 inches high – see Ref. [ 28]. The manufacturer built the device so that it could fly into
dangerous areas or areas hit by disasters instead of human beings in order to investigate the
situation. Another example would be for the micro-UAV to fly through crevices of a building
flattened by an earthquake and search for trapped survivors. The methods of operations are still to
be developed.
Another example of a micro UAV is the one that DARPA has designed to be used as an airborne
communication node – see Figure 1-7, which will provide a communications relay where necessary.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 18 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
FIGURE 1-6 SEIKO EPSON CORP. MICRO-ROTARY UAV
FIGURE 1-7 DARPA AIRBORNE COMMUNICATIONS NODE
1.3 CIVIL MINI-SMALL UAVS PARTICULARITY
Mini-Small UAVs fly below the controlled airspace and hence will not require the collision avoidance
systems associated with the larger civil UAVs. However, they may require special collision
avoidance systems for flying in areas with natural or man-made obstacles. Collision avoidance of
these types of obstacles may be resolved by entering obstacle data into their navigation database.
They do not require unique takeoff and landing capabilities, which adds to their flexibility.
These civil UAVs have numerous applications such as ad-hoc monitoring where the civil UAV is
deployed on site with no takeoff or landing strip required. Applications vary from fire monitoring by
the fire fighters upon arrival at the scene to optimise the fire fighting effects, to localised pipeline or
traffic monitoring, through remote sensing.
FIGURE 1-8 POSSIBLE MINI-SMALL CIVIL UAV6 ON A VINEYARD MAPPING APPLICATION7
Another example of a small civil UAV application is in agriculture. Here, the small civil UAV can be
programmed to fly over a large wine vineyard to detect temperature variations by night, monitoring
potential freezing. By sending thermal sensor data to the application station, the vineyard owner
can mitigate potential frost problems by applying water to prevent freezing.
6 The T-15, www.arcturus-uav.com 7 See Ref. [ 68]
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 19 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
1.4 CIVIL MALE UAVS PARTICULARITY
The civil MALE UAVs require takeoff and landing strips, from which they will operate and require
support facilities for maintenance and repair, with the associated logistics. These civil UAVs will
regularly fly in controlled airspace and require See-and-Avoid systems that ensure collision
avoidance. These are critical technologies for civil MALE UAVs. These critical technologies are
one of the main challenges in civil UAV technologies and have to be developed and validated.
Civil MALE UAVs will be able to fly at altitudes up to approximately 10 000 m and at speeds similar
to manned aircraft and for periods in excess of 24 hours. This will give them the capability to
replace the present manned aircraft in the tasks that have already been described as Dirty, Dull and
Dangerous (D3). The monotonous applications that are presently carried out by manned flight will
be easily replaced by civil MALE UAVs. Their payloads will be similar or improved as compared to
those currently being used. With future plug-and-play technology payloads, different kinds of
remote sensing suites will to be carried by the civil MALE UAVs. The flexibility provided by this
family of civil UAVs includes, but is not limited to: coastal patrols, flood monitoring, digital mapping,
aid in emergencies, search and rescue and fire monitoring and management, precision agriculture
and fisheries monitoring, environmental studies that cover weather and pollution.
1.5 CIVIL HALE UAVS SYSTEM PARTICULARITY
HALE civil UAVs are similar to MALE civil UAVs, and require the necessary collision avoidance
equipment to traverse the air traffic before reaching the high altitude. The HALE flies above the air
traffic at altitudes above 60000 feet and in regions of severe temperature and wind changes. This
necessitates unique propulsion requirements to remain economical at those altitudes for long
periods as well as on board temperature stabilisation systems – see Figure 2-10 on page 38.
Civil HALE UAVs will be able to complement existing satellite systems, possibly replacing the Earth
Observation type satellites in the future. The other applications that civil HALE UAVs will carry out
are telecommunication relay stations that may complement or replace deep-sea telecommunication
cables and broadband TV relay stations.
1.6 AIRSPACE CATEGORISATION
Airspace at first glance appears to be an unquantifiable and endless resource. In reality airspace is
a closely supervised and limited resource, with defined attributes and strict rules of use. These
rules and regulations fall within two broad categories: controlled airspace and uncontrolled airspace
and within these two categories, six classifications determine the flight rules, pilot qualifications and
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 20 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
aircraft capabilities required in order to operate within any section of the airspace. A schematic
description of these classifications is shown in Figure 1-9. All civil aviation occurs below an altitude
of 60000 ft.
Controlled airspace is the airspace where Air Traffic Control8 (ATC) service is provided, which is
divided into five classes (A-E). These five classes may differ slightly between countries. Flight
through these various classes is through an authorised corridor, defined by a flight vector.
Class A Airspace – encompasses all airspace from 18,000 feet above mean sea level (MSL) to
60,000 feet MSL, including the airspace overlying the waters within a
predefined political distance from the country’s coastline
Class B Airspace – is defined, as the airspace that surrounds the nation’s busiest commercial
airports. These areas tend to be the most congested airspace and have the
most complex mix of aircraft operations, with everything from single-engine
trainers to high-speed jet transports. At its core, Class B extends from the
surface up to 10,000 feet MSL. All operations within Class B require specific
approval by ATC. The exact dimensions and shape of the layers are
individually tailored to meet local traffic and safety needs.
Class C Airspace – is the airspace that surrounds busy commercial airports of midsize cities with
a large number of commercial flight operations, as well as some military
airports. Operating control towers at the primary airport and radar services
are key components of Class C. The inner ring has a radius of 5 nm and
extends from the surface up to but not including 4,000 feet above ground
level (AGL). The outer ring has a radius of 10 nm and extends from 1,200
feet AGL up to but not including 4,000 feet AGL.
Class D Airspace – is applied to civilian and military airports with operating control towers but
where the traffic volume does not meet Class C or B standards and where
radar service often is unavailable. Traffic in this airspace usually lacks heavy
jet transport activity but often includes a complex mix of general aviation,
turboprop, and business jet traffic. The general shape of Class D airspace is
a 5 nm ring from the surface up to but not including 2,500 feet AGL.
8 This is sometimes referred together with Air Traffic Management (ATM)
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 21 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Class E Airspace – extends upward from either the surface or a designated altitude to the
overlying or adjacent controlled airspace. It includes all airspace from 14,500
feet MSL up to but not including 18,000 feet MSL. It also includes all other
controlled airspace necessary for instrument flight rules (IFR) operations at
lower altitudes but not already classified as Class A-D.
Class G airspace – is uncontrolled airspace and includes all airspace not otherwise designated
as Class A-E.
FIGURE 1-9 AIRSPACE CLASSIFICATIONS9, & EXAMPLE OF A FLIGHT CORRIDOR THROUGH CLASS B AIRSPACE
9 Represents an airfield or airport, - represents a control tower
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 22 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
2 THE NEEDS FOR CIVIL UAVS AND THEIR BENEFITS
2.1 BACKGROUND
“The trouble with the future is that it usually arrives before we’re ready for it10”.
In the past, technological breakthroughs drove the market, whereas today, it is more the market
that drives the technological breakthroughs – see Figure 2-1. Today’s
aerospace industry is moving into the mature-consolidation phase, where
innovation is concentrated more in the cost-driven improvement of
particular products or services and towards autonomous flight with a
focus on “See-And-Avoid11” technologies. As they mature, aircraft will be
more autonomous, with cabin staff meeting the needs of the passengers
and the Head of the Crew supervising the autonomous system flying the
aircraft. It is with this in mind that civil Unmanned Air Vehicles (UAV) should be viewed. The civil
UAV will be just another component in airspace, nothing out of the ordinary. Piloted aircraft will
become a sport for the few, rather like Formula-One racing is today.
NASA has prepared the ground for small commuter aircraft to be flown by the masses, under the
acronym SATS – Small Aircraft Transportation System. The SATS project will enhance the
available collision avoidance systems, which are a major element in civil UAV technology.
Imagine the technological developments that computers have gone through, from machine code
programming to high-level 4th and 5th generation languages that automatically produce the low-level
code needed to run the computer systems. Similarly, flying aircraft has gone from the seat of the
pants, stick and rudder flying, via flight-system-augmentation to fly-by-wire automatic flight across
oceans. Today one can have the whole flight plan uploaded to the aircraft12 and when coupled with
the autopilot, the pilot does not have to touch the controls from takeoff to landing. This is a
significant step towards fully autonomous flight, which is really just around the corner. Once
collision avoidance is satisfactorily solved, autonomous flight will have arrived.
10 Arnold H. Glasow 11 Also referred to as detect and avoid systems. 12 The FAA has been providing “Coded departure routes” (CDRs), from
2001,http://www.ainonline.com/issues/12_04/12_04_codedclearencep65.htm
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 23 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
FIGURE 2-1 RELATIONSHIP OF TECHNOLOGIES & MARKET FORCES
Initially it will be tested through pilotless cargo13 air vehicles and once mature, will move to
passenger14 aircraft. Civil UAVs will use and promote all these research and development activities
together with present aircraft, through miniaturisation and sophistication.
The proposals laid out in this European Civil UAV roadmap will address: societal needs, market
demand and the expected technological advantage – see Figure 2-2. These are the three main
factors ensuring a sensible and successful allocation of research resources. Furthermore,
European Civil UAVs will be an impetus for new aerospace applications, where present aircraft
platforms are too expensive or are just unsuited for the applications.
European civil UAVs will bring about an aerospace revolution that will lead the field of unmanned
flight, across the world. This vision is within reach in the coming decade.
FIGURE 2-2 CIVIL UAV INNOVATION GOALS
There is no doubt today that a huge market is currently emerging from the potential applications
and services that will be offered by civil unmanned aircraft. It is predicted that with the increasing
13 The European IFATS project is a significant step towards this. 14 A psychological barrier has yet to be overcome.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 24 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
demand for missions capable of being fulfilled by civil UAVs, the present market dominance of
military UAVs will move to civil UAVs15. This will be due to the growing number of civil applications,
which will use civil UAV technologies, that include: atmospheric, and meteorological research such
as pollution detection & control, topological mapping, weather formation studies, agricultural and
forestry, law enforcement such as border patrol and traffic monitoring, disaster/emergency
management, telecommunication relays and infrastructure inspection such as pipeline and power
line monitoring.
The area of civil UAVs has unique challenges and solutions. It should be treated as a separate area
of research, due to their uniqueness. Civil UAVs are not just another branch in the aerospace
industry. The civil UAV relationship with other aerospace areas is similar to that between manned
aircraft and spacecraft, where both share certain technologies yet meet very different challenges.
Civil UAVs will be expected to fly continuously for a number of months at various altitudes
consistent with their applications providing the required services. These are exceptional
requirements and their challenges are very distinct. In addition, these are requirements that no
other platform presently carries out, nor is expected to carry out, except for satellites, in some
specific cases.
It can be explained that this shift to civil UAVs will be due to technological maturity together with
falling costs and acceptance by society of civil UAVs16. The United Kingdom Civil Aviation Authority
expects17 that UAVs will be commonplace and will share controlled airspace with manned aircraft.
Furthermore, due to the rising awareness in UAVs worldwide, several efforts are in progress to
integrate the UAV operations routinely and safely into civil airspace. This vision of integration is
already beginning to materialise around the world with the operation of military UAVs outside of
segregated areas and into controlled airspace18. A number of civilian and paramilitary applications
are emerging, with many civil operating concepts under development. It was reported19 that after
the Kosovo conflict, Eurocontrol asked the German research company IABG20 to prepare a report
looking at ways to manage UAVs in commercial airspace. The European Commission funded the
USICO project, which laid the initial foundations for the integration of civil UAVs into controlled
15 ISTECS JOURNAL, V (2004) 55-64 Ref. [ 1] 16 See Ref. [Error! Reference source not found.] 17 UK Civil Aviation Authority, Ref. [ 2] 18 The Balkan experience – Bosnia and Kosovo 19 www.Airtrafficmanagement.net - “Controlling empty aircraft”, Autumn 2004 20 See Ref. [ 4]
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 25 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
airspace – see section 3.2 on page 94.
Elsewhere, civil UAVs have become recognized as the aeronautical industry’s next generation
solution to many of society’s needs. In the United States, NASA, as well as consortiums of leading
manufacturers are heavily involved in assuring that the path to civil UAV operation at all altitudes is
a short one21.
Europe aims to double current manned air traffic capacity by the year 202022. Examining these
aims, for controlled manned air traffic one can immediately appreciate the complexity of introducing
civil UAVs into the controlled airspace. As the vision of global interoperability23 takes form with
manned aircraft flying in controlled airspace, the vision of global interoperability will hold true for
civil UAVs and their operations also flying in controlled airspace.
These civil UAV challenges are conducive to innovation and it is expected that many of the brilliant minds from across Europe will be attracted to the fascinating world of civil UAVs and their applications.
Civil UAVs include highly sophisticated multidisciplinary technologies.
A strong leadership and a balanced representation of stakeholders from government, industry, research and the European Commission are a condition sine qua non24 for instilling and implementing the civil UAV strategy for Europe.
The civil UAV programme will stimulate pan-European activity that will be based on partnership and
co-operation throughout all its phases.
As with all high technology industries, long-term research and development is the fuel to reach the future.
For example, the overall goals of future civil UAVs, are aimed to make civil UAVs more compact,
economical and able to carry powerful payloads. When combined with reliability and extended flight
time they become agile and effective mobile and flexible scientific platforms. Research in achieving
compact, economical civil UAVs carrying the required sensors will be jeopardised by placing
emphasis on immediate economic gain and not on the long-term research and development, which
21 See Ref. [ 46] 22 4th Integrated CNS Conference NASA Glenn Research Centre, Ref. [ 18] 23 See Ref. [ 52] - Global Interoperability: Prerequisite for future growth in air transport and definitions on page172. Recent flight trials have shown that an innovative Air Traffic Management concept called Tailored Arrivals can improve efficiency and reduce noise and emissions when aircraft land. In Tailored Arrivals, clearance instructions are transmitted electronically to arriving aircraft, so that pilots and controllers don’t have to engage in multiple voice communications. Linked directly to an aircraft’s Flight Management System, the electronic data guide the aircraft on a steady descent profile along the most efficient path to its destination. 24 Indispensable condition – a condition without which the civil UAV roadmap will be nigh on impossible to implement
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 26 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
is needed.
The future strength of European research is dependent on a high-quality generation of researchers.
Advances in the design and production of miniaturised systems will lead to the development of a
wealth of superior and effective devices. These range from complex next-generation
microprocessors and high-speed digital signal processors, to specific chips for 3-D scene and
object rendering. These will further facilitate the development of very complex sophisticated
electronic/mechanical or micro-electro-mechanical systems (MEMs) such as intelligent, adapting
flight control computers to morphing civil UAVs. The range, diversity and complexity of many of
these systems provide a unique challenge from the point of view of the civil UAV market. It is
readily appreciated here that the potential spin-offs are numerous and varied. The technological base that will be available will be tremendous.
The Lisbon and Barcelona summit meetings set goals for Europe to strive
and become “the most competitive knowledge society in the world”.
Investing in research and development will make Europe more economically competitive.
Knowledge has been recognised as a driver of economic growth. Technological progress and the
globalisation of the economy have increased the importance of human skills in economies (see
Berman25 et al., 1998). Thus, Europe’s investments directed at high technology industries, will
indirectly affect the research and development institutes and learning centres increasing Europe’s
technological infrastructure, encouraging economic growth and technical expertise. Europe’s skill-
base will be widened with the skilled workforce produced. This has been proven in countries
promoting apprenticeships, such as Germany and Austria. The knowledge generated by
investments, ultimately pays for itself, and it is this skilled workforce that becomes sought after.
Civil UAVs are knowledge-intensive technologies and include a wide range of sophisticated
disciplines. By formulating a pan-European civil UAV effort, a combination of research expertise
coupled with industrial experience will be put in place. The know-how gained through practical
experience and the know-who gained through research personnel networking, when combined,
delivers an exceptional economic potential.
According to Ref. [ 1], approximately 100 European Universities and numerous research institutions
and industries in Europe are actively engaged in UAV development. Integrating Europe by a coordinated effort in civil UAV technologies will increase Europe’s ability to create jobs and
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 27 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
25 Ref. [ 13]
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
sustainable growth. This will also counter the lack of cohesion and fragmentation of individual civil
UAV efforts presently taking place, which may be stemming the full benefits possible.
Fostering the entrepreneurial spirit and innovation will make a still stronger economy that can create quality jobs and protect social welfare systems, throughout the aerospace industry and its supply chain. SMEs will be able to easily participate, since the technologies involved are very varied with room for innovation and novel approaches.
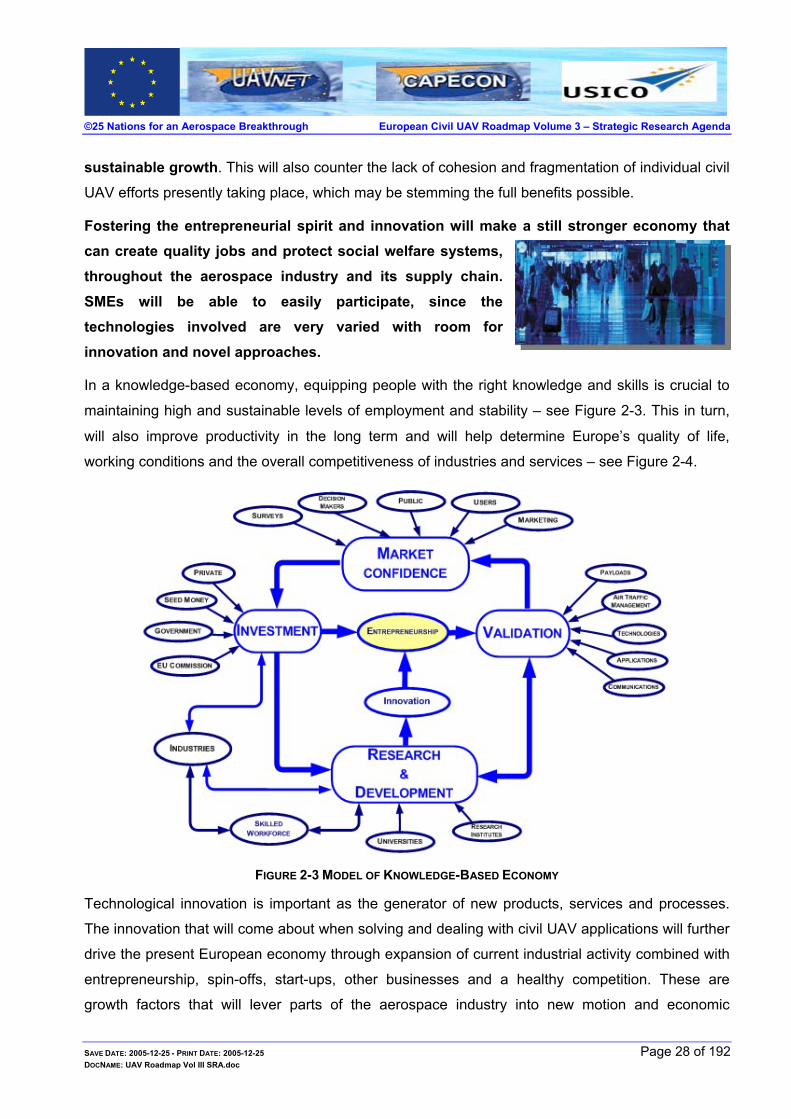
In a knowledge-based economy, equipping people with the right knowledge and skills is crucial to
maintaining high and sustainable levels of employment and stability – see Figure 2-3. This in turn,
will also improve productivity in the long term and will help determine Europe’s quality of life,
working conditions and the overall competitiveness of industries and services – see Figure 2-4.
FIGURE 2-3 MODEL OF KNOWLEDGE-BASED ECONOMY
Technological innovation is important as the generator of new products, services and processes.
The innovation that will come about when solving and dealing with civil UAV applications will further
drive the present European economy through expansion of current industrial activity combined with
entrepreneurship, spin-offs, start-ups, other businesses and a healthy competition. These are
growth factors that will lever parts of the aerospace industry into new motion and economic
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 28 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
development, which will be brought about due to the various new employment activities created –
see Figure 2-5. Civil UAVs are not only a disruptive innovative technology with a very wide range of
disciplines, but do not need high capital investments. This opens opportunities to all interested to
participate in these technologies.
FIGURE 2-4 PROJECTED CIVIL UAVS APPLICATIONS26 AND BENEFITS
Strategic coordination andimplementation, of the civilUAV roadmap, will bond anew European groupfostering additional futureEuropean interaction,further strengthening theEuropean Union.
The 2005 key figures show that EU R&D intensity is close to stagnation. Growth of R&D investment
as a percentage of GDP has been slowing down since 2000 and only grew 0.2% between 2002 and
2003. Europe devotes a much lower share of its wealth to R&D than
the US and Japan (1.93% of GDP in the EU in 2003, as compared to
2.59% in the US and 3.15% in Japan) – see Figure 2-6. While China,
has lower R&D intensity (1.31% of GDP in 2003) it grew at about 10%
per year between 1997 and 2002. If these trends in the EU and China
continue, China will be spending the same amount of GDP on
research as the EU in 2010 – about 2.2%.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 29 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
26 See Ref. [ 72]

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
FIGURE 2-5 CIVIL UNMANNED AIR VEHICLE – NATURAL CONTINUATION TO HI-TECH AIR TRANSPORT
Likewise, Europe lags in high technology27 relative to the U.S. and Japan. In addition, it has been
stated that, “It is still more difficult than it need be for scientists in several countries to cooperate in
research” – see Ref. [ 14, 16]. To amend this, the European Commission28 has decided to invest
3% of the GDP aligning itself with America and Japan.
FIGURE 2-6 INVESTMENT IN RESEARCH & DEVELOPMENT - SEE REF. [ 14]
The European civil UAV programme will complement the European “Quality of Life” programme,
reinforcing Europe's research facilities, and optimising their use. Furthermore, it will promote
networking between user groups, industry, researchers and their relevant resources. The human
infrastructure will be strengthened through this networking, allowing convergence and mobility of
resources. It will respond to the lack of interest in the field of aerospace, “It is a known fact that
27 See Ref. [ 14] – “Closing the technology gap” 28 See Ref. [ 54] – “Science and technology, the key to Europe's future”
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 30 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
aerospace workers are in high demand and there is a shortage across the world29”.
The three EarthObservation summitsthat took place to datestrengthen the need forcivil UAVs – see section 2.3.5
Concern has also been mounting for sometime that Europe might not be best equipped to respond
to the challenges facing higher education in the 21st century. This concern has to be understood in
the context of the goals of Lisbon and Barcelona. Europe’s universities carried out so much in the past to enrich our planet’s academic life. In the past, Europe led the world in terms of dealing with diseases and in enhancing human life through its technological achievements.
However, Europe cannot just live off its laurels! Recently most of the Nobel Prizes were not
awarded to Europe. The next generation of the world’s scholars are more inclined to move to pursue the challenge of research in America, the often-termed “brain drain” . These are worrying developments for Europe.
Civil UAV research and development in Europe will be able to act as an
attractor of talent from all over the world, rather than watching the present “brain-drain”.
This will also support the conclusions of the conference, “Brain Gain – the Instruments”, which took
place in The Hague 29-30 September 200430. The civil UAV programme will promote innovation,
across Europe. Encouraging innovation is essential for European enterprises to be competitive, and
is one of the main objectives of research policies. Where technology-based innovation is
concerned, enterprise and research policies are mutually enriching. This has a direct positive effect
on the economy.
Europe should not hesitate to invest in civil UAV technologies, a growth area with benefits too great to miss.
By investing in people and skills, manufacturing and service industries will have the highly skilled
workers they need and the European economy will be strengthened.
These technologies, when implemented, will drive the air transport
fatalities down, in line with the ACARE statement for safety31, since civil
UAVs need inherent safety such as: collision avoidance systems32,
highly sophisticated navigational systems that will also include
autonomous takeoff, navigation to destination and finally landing at the destination. The
29 See Ref. [ 8], [ 85], [ 86] 30 See ref. [ 15] 31 See ACARE – “THE CHALLENGE OF SAFETY” – Vision 2020
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 31 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
technologies involved in bringing about fully autonomous civil UAVs will have a dramatic positive
effect on transport avionics and Air Traffic Management. The fine meshing of all these technologies
will make use of the pan-European potential and will cause a modernisation of concepts and
approaches to future challenges, throughout research institutes, industry and academia.
European society will greatly progress through the positive results expected from all the
applications involved, such as: monitoring emissions into the atmosphere, reliable long-term
weather forecasts, which will allow water and other critical resources to be managed and
conserved. Employment of a skilled workforce across the European continent will occur, with SMEs
easily finding their place in these new disruptive technologies. Due to its innovative nature, the
entry to the civil UAV market is not limited to established 1st tier aerospace companies, but allows
even 3rd and 4th tier companies with their associated supply chains to contribute and enjoy the
benefits of these technological developments.
At the Gothenburg Summit in June 2001, the European Council
endorsed its first strategy on sustainable development, following a
Commission Communication on "A Sustainable Europe for a Better World: A European Union Strategy for Sustainable Development". In this document, the Commission calls for "establishing by 2008 a European capacity for global monitoring of environment and security". Civil UAVs are an ideal first candidate for this!
Accuracy and data acquisition availability provided by civil UAVs will be one of the main advantages over present remote sensing techniques.
Environment and Earth scientific missions require data gathering over extended periods. Collecting
this data is presently performed through very expensive33 albeit somewhat dated satellite
technology or inadequate manned flights. Both are limited due to the period of time that the
acquisition system has to acquire the data. Satellites pass over the area of interest with a very short
time period at the locality being studied34. Their orbits are predetermined and very constrained.
Manned flight is limited due to repetitive tasks causing pilot fatigue. Civil UAVs however, do not
suffer these limitations, since they can fly at the altitude required by the application and can
produce much higher data rates than satellites, due their proximity to the required zone. A civil UAV
can loiter35 for long periods. When these civil UAVs carry the necessary payloads, they become
32 ACARE is to meet 30-31 May 2005 to discuss issues of Air transport, ATC, Safety and security and unification of Europe’s potential.
The EU civil UAV roadmap fits into this framework superbly. 33 Micro-satellites are being developed to minimise the costs involved in “traditional” satellite technologies 34 LEO type orbits, which are needed due to the required proximity to the Earth’s surface. 35 Loiter is defined as the ability to remain above a given area.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 32 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
very powerful mobile scientific platforms. As payload sensor technology becomes smaller, cheaper
and yet more powerful, the civil UAV option becomes ever more attractive. For example, the civil
UAVs can fly through toxic gases or very close to volcanic activities, with no danger to humans
involved, repeating the operation as many times as is necessary.
NASA held an intensive workshop on the utilisation of UAVs for global climate change research36,
which is yet another application that replaces manned aircraft or low orbiting satellites. There is a
shift towards using civil UAVs in replacing manned aircraft in the D3 roles, but more importantly in
complementing satellites and in some cases the preference is a civil HALE UAV37 over micro-
satellites and nano-satellites.
The civil UAVs offer various economic applications such as alternative high altitude communication
platforms or platforms that allow monitoring dangerous locales, for example: from investigations into
landslides, volcano monitoring, land slippage, weather monitoring and
gas pollution emissions to sea coral depletion studies in distant atolls or
even wildlife estimation validation across oceans or African plains.
Once operational, civil UAVs, will offer economic flexibility and scientific
superiority over other similar possible methods. The present overall
strengths and weaknesses for civil UAV technologies compared to other
technologies for remote sensing can be readily appreciated by
examining Figure 2-7. This will change as civil UAV technologies
improve with research and development.
In brief, it can be stated that civil UAVs fulfil five major niches:
Civil UAV transport aircraft
Scientific and Earth Observation
Surveillance
Satellite complement
Emergencies
36 See Ref. [ 46] 37 At present, there is very little choice in HALE UAVs civil or other.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 33 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
FIGURE 2-7 PRESENT STRENGTHS & WEAKNESSES OF CURRENT CIVIL UAV TECHNOLOGIES 38
2.2 PRESENT APPLICATIONS
Current use of civil UAVs is minimal, due to safety, cost and operational constraints. The civil UAVs
presently used are military UAVs employed in civilian type roles, which further confines their use.
This is due to the constraints39 placed by the military (who own the system), coupled with
constraints placed by the local ATC.
The most recently published utilisation of military UAVs in a civilian role is the use of UAVs during
the recent Tsunami disaster. Indian UAVs were flown in search and rescue missions locating
stranded people and saving numerous lives.
2.2.1 Present Law Enforcement Applications Authorities say that the Picayune Police Department, in Mississippi, is one of the first agencies in
the United States to use unmanned aircraft to combat crime40.
Similarly, Belgium patrols its coastline using military UAVs, since civil
UAVs are not presently available and the U.S. uses paramilitary UAVs
to augment their patrols along the Mexican border.
38 Remote Sensing applications - See Ref. [ 60] 39 These UAVs are military equipment loaned out to perform civilian type roles. They are restricted in the way they are operated and in
the use to which they are put. 40 Air-O-Space International, a service company, Uses UAVs in Partnership with Picayune Police Department to Fight War on Drugs,
November 28, 2004. See Ref. [ 29, 33]
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 34 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
2.2.2 A Civil UAV Looks inside Volcanic Craters41 The latest thermal imagery from the St Helen’s crater, near Washington42, indicated that in certain
areas, the temperature was as high as 570 degrees Celsius, with signs that the magma was
continuing to rise. There were also significant increases in carbon dioxide and other gaseous
emissions, rendering such a mission too dangerous for manned flight. Under these conditions, the Silver Fox UAV was recommended as the ideal tool to look inside the crater on behalf of researchers. Here again, due to the lack of civil UAVs, a military UAV was
recommended.
Volcanic studies have been carried out in Japan using Yamaha’s RMAX helicopter, a civil UAV43.
The inspections of the erupting Mt. Usu on Japan’s northern island of Hokkaido were made in 2000
– current manned flight in the area are under restriction. It is hoped that data obtained from these
flights will allow preventive measures against landslide and mudslide damage.
2.2.3 Present Agricultural Applications Yamaha has been providing crop spraying civil rotary UAVs for some years now with its Yamaha’s
RMAX civil UAV.
Direct benefits of thesetechniques will allowsuperior and efficientwater and fertilizer use.In addition, it providesfor higher crop yields.
In September 2002, Stan Herwitz, professor of Earth Science at Clark
University in Worcester, Massachusetts, together
with NASA, carried out the first-ever proof-of-
concept imaging mission above a 3500-acre
commercial coffee plantation in Hawaii. The
project tested the commercial44 use of a solar-powered civil
Unmanned Aerial Vehicle (UAV), NASA's solar powered Pathfinder-
Plus UAV. The civil UAV was equipped with a transponder for routine supervision by regional air
traffic controllers and flew in U.S. national airspace.
High-resolution colour and multi-spectral digital imaging payloads were used to transmit near real-
time data and images to the data application ground control station. The multi-spectral
quantification data of canopy colour was correlated to mature fruit harvest from certain fields with
significant fruit display on the tree canopy exterior. In addition, the colour images were used for
41 See Ref. [ 34] 42 FLIR Systems, Vol. 3, Issue 7 – Infrared from the Front Line October 2004 [www.flir.com/imaging/Articles/FOV/] 43 Japan uses a certified and regulated civil rotary UAV for agricultural crop spraying. 44 See Ref. [ 38]
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 35 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
mapping invasive weed outbreaks and for revealing irrigation and fertilization irregularities. The
spectral imagery received in the project and the civil UAV that obtained them are shown in Figure
2-8. In addition, the correlation between the data received to actual crop conditions is described
graphically in Figure 2-9.
FIGURE 2-8 KAUAI COFFEE PLANTATION - COMPOSITE OF HIGH RESOLUTION VISIBLE IMAGERY45
FIGURE 2-9 KAUAI COFFEE PLANTATION – RIPENESS MAPPING CORRELATION
2.3 FUTURE APPLICATIONS
This section briefly overviews the numerous applications where civil UAVs will contribute. The
applications listed here are in no particular order of importance.
As more people are exposed to the subject of civil UAVs, an ever-
increasing number of potential civil UAV users, is emerging with
varied requirements for civil UAV applications. Some of these
applications are almost possible with present UAV technologies,
albeit military, and others require further technological progress. There are also applications, which
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 36 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
45 Example of colour-infrared digital image of coffee fields captured in flight by DuncanTech payload. See Ref. [ 37]

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
require long-term research and development, in order to bring the required technologies into focus.
The main civil UAV applications, discussed today are shown below and may be grouped as follows:
2.3.1 Satellite Complement Civil HALE UAVs will be able to augment satellites used in monitoring the Earth’s environment.
Scientific missions are “data collection” intensive and civil UAVs provide the platform which when
combined with appropriate sensors offer a solution to those scientific missions. The civil UAV
systems will effectively connect local research to “global tools”; a high-flying civil UAV will facilitate
atmospheric data collection to local scientific research institutes. Civil UAVs will also permit highly
effective repetition of data collection and operation tailoring.
Satellite operations can be grouped into five main applications: communications, broadcasting,
navigation, Earth Observation, and science related activities. The costs involved in putting a full-
scale satellite into orbit are high46 – see Figure 2-13, and recently much effort has been invested in
micro-satellites. These small satellites are cheaper than the full-scale satellite both in production
46 See Ref [ 49]
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 37 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
and in deployment. However, they are still expendable and the technology onboard has to be
“frozen” some years ahead to allow proper system verification and validation. For example, the
sensors that civil HALE UAVs will carry will be truly state-of-the-art and not “past-state-of-the-art”
due to the technological freeze required prior to the system verification and validation process. Civil
HALE UAVs will perform the tasks, which presently use micro-satellite technology, more efficiently.
Civil HALE UAVs costs are far less than those of satellites, even when considering the support
logistics needed to assure that a civil HALE is constantly providing service – see Figure 2-12 on
page 40. Progress in technology, where necessary, will be readily incorporated into the civil HALE
UAV platform, when it lands for routine maintenance. Civil HALE UAV multiple takeoff and landing
safety requirements will be much lower than the launch costs associated with a single launch of an
individual micro-satellite and its associated safety requirements. In order to appreciate the
difficulties involved one must appreciate the atmospheric model, which is shown in Figure 2-10.
Satellites have difficulties measuring at low altitudes in the atmosphere, and for LEO47 satellites,
can only take measurement for a limited period for every orbital pass. Civil HALE UAVs, however,
do not have this limitation. Polar orbiting satellites also have a similar problem of limited interval per
orbital pass and are not stationary above the point of interest.
FIGURE 2-10 THE ATMOSPHERIC MODEL
47 LEO is the acronym for Low Earth Orbit.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 38 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Geostationary satellites are found above the equator where the atmosphere is at its densest, and
begin to trace zigzag figures of “8” about their station keeping position once their energy source is
depleted. An added problem is that the “belt” of geostationary satellites is becoming increasingly
more crowded as more of these types of satellites are placed in orbit. The gravitational forces
acting on these types of satellites are not enough to pull them into orbit and so they remain
suspended above Earth – see Figure 2-11.
FIGURE 2-11 SNAPSHOT OF GEOSTATIONARY SATELLITES AROUND THE EQUATOR
In addition, civil HALE UAVs may be used to calibrate satellite data or even enhance
measurements where required, since they fly at a much lower altitude than satellites, and as
possible relays from ground may be used to receive and transmit accurate data, overcoming
atmospheric related distortions. This alone will increase the communications bandwidth of the
satellite system. These are just some of the advantages, which civil HALE UAVs have over
satellites.
What is more important is that, similar to all systems, satellites sometimes have malfunctions48, which may cause them to be abandoned completely49 or an attempt using
the US space shuttle to repair them is carried out. The costs involved and the lack of adequate recovery options for satellite systems are prohibitive when compared to civil UAV systems.
For civil UAVs, costs are calculated as in terms of flight hour costs, whereas for satellites, due to
the nature of their use, costs are calculated as in terms of cost per day. Note that the costs for
48 The space shuttle was used numerous times to deal with malfunctioning satellites – in 1984 the crew of the Shuttle attempted to
recover the Solar-Max satellite, but failed. In 1992 the STS 49 – Endeavour carried out a capture, repair and re-deploy the INTELSAT VI (F3) satellite In 1998 CNN reported that Japan was trying to reposition a 46.2 billion yen ($370 million) communications satellite after it failed to reach its proper orbit. These are but a few of the many examples of satellite malfunctions reported.
49 http://www.spacetoday.net, Tue, Sep 23, 2003, 1:36 AM ET (0536 GMT): Loral announced Monday that it has declared the Telstar 4 communications satellites a total loss, three days after reporting a power problem with the spacecraft. The spacecraft experienced a short circuit of its primary power bus on Friday morning, causing the spacecraft to cease operations.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 39 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
satellites are a function of design life, which means that for a long design life, where costs per day
are lower, the user will suffer from old technologies. This is in stark contrast to civil UAVs, which will
offer the latest onboard technologies and associated information.
FIGURE 2-12 ESTIMATED FLIGHT HOUR COST – HALE
FIGURE 2-13 SPACECRAFT COST-PER-OPERATIONAL DAY AS A FUNCTION OF THE DESIGN LIFETIME50
50 Source Ref. [ 49], p.14
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 40 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
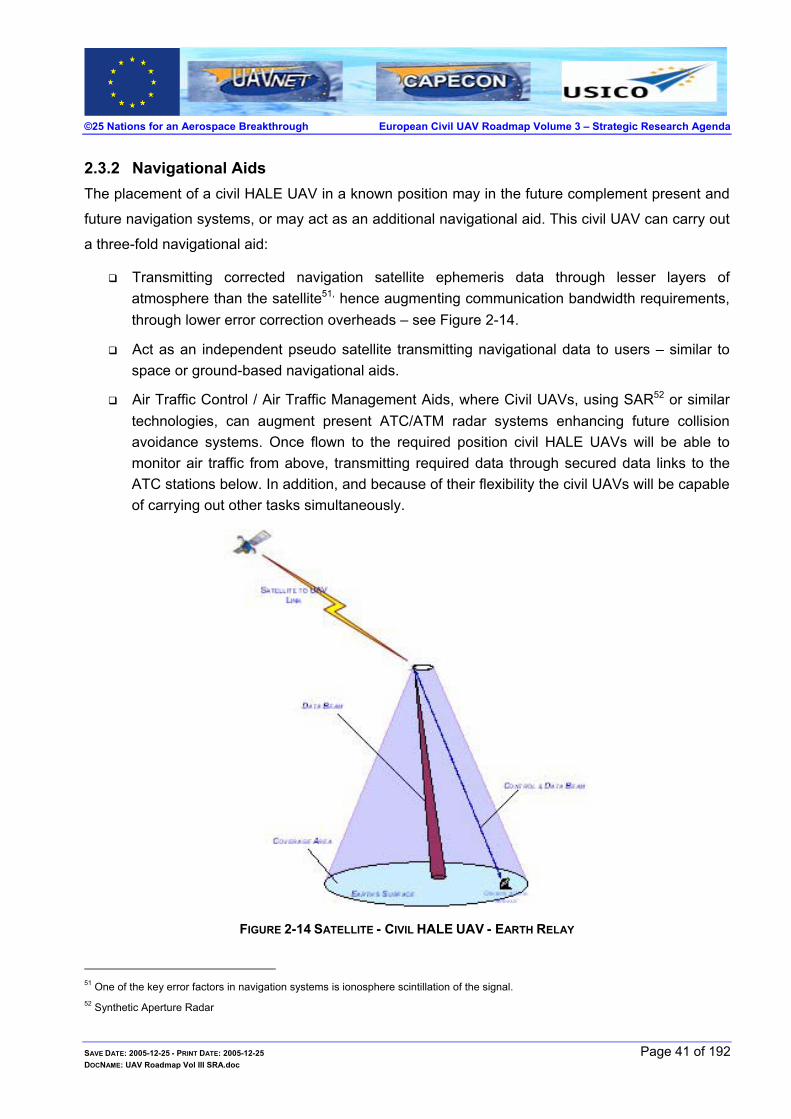
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
2.3.2 Navigational Aids The placement of a civil HALE UAV in a known position may in the future complement present and
future navigation systems, or may act as an additional navigational aid. This civil UAV can carry out
a three-fold navigational aid:
Transmitting corrected navigation satellite ephemeris data through lesser layers of atmosphere than the satellite51, hence augmenting communication bandwidth requirements, through lower error correction overheads – see Figure 2-14.
Act as an independent pseudo satellite transmitting navigational data to users – similar to space or ground-based navigational aids.
Air Traffic Control / Air Traffic Management Aids, where Civil UAVs, using SAR52 or similar technologies, can augment present ATC/ATM radar systems enhancing future collision avoidance systems. Once flown to the required position civil HALE UAVs will be able to monitor air traffic from above, transmitting required data through secured data links to the ATC stations below. In addition, and because of their flexibility the civil UAVs will be capable of carrying out other tasks simultaneously.
FIGURE 2-14 SATELLITE - CIVIL HALE UAV - EARTH RELAY
51 One of the key error factors in navigation systems is ionosphere scintillation of the signal. 52 Synthetic Aperture Radar
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 41 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
2.3.3 Telecommunications Telecommunications based on satellite technologies are predicted to increase – see Figure 2-15. In
addition, studies comparing satellite, terrestrial and high altitude platforms (HAPs), where civil
HALE UAVs are used were carried out. The results of these studies are summarised in Table 2-1
page 45. Even taking into account the possible errors, due to the date the information was
gathered, the rising trend is still distinct. Europe initiated and sponsored through ESA53 two major
parallel studies to lay the groundwork for a possible European Space Weather Applications
Programme. One of the main problems associated with satellites is “space weather”, which causes
reduced life or loss of satellites.
FIGURE 2-15 ESA SPACE WEATHER PROGRAMME STUDY MARKET ANALYSIS54
To reduce space weather effects, satellite hardening and other techniques are used, increasing the
satellite costs. Civil HALE UAVs are expected to suffer much less from space weather, since they
will use the atmosphere as a shield. In addition, they will use their lower altitude to monitor Earth
more accurately than the satellite – see Figure 2-16. Moreover, communication outages due to
adverse weather and ionospheric scatter disrupt communications with satellites.
High altitude platforms (HAP), will offer alternative communications solutions55. They will be able to
provide state-of-the-art communication relay stations. The civil UAVs can act as relay stations
between themselves providing an alternative telecommunication link to the underwater cables
presently in use – see Figure 2-19.
53 Between 1999 and 2001 - http://esa-spaceweather.net/spweather/esa_initiatives/spweatherstudies/spweatherstudies.html 54 ESYS-ESYS-2000260-RPT-02 Issue 1.1 28 September 2001.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 42 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
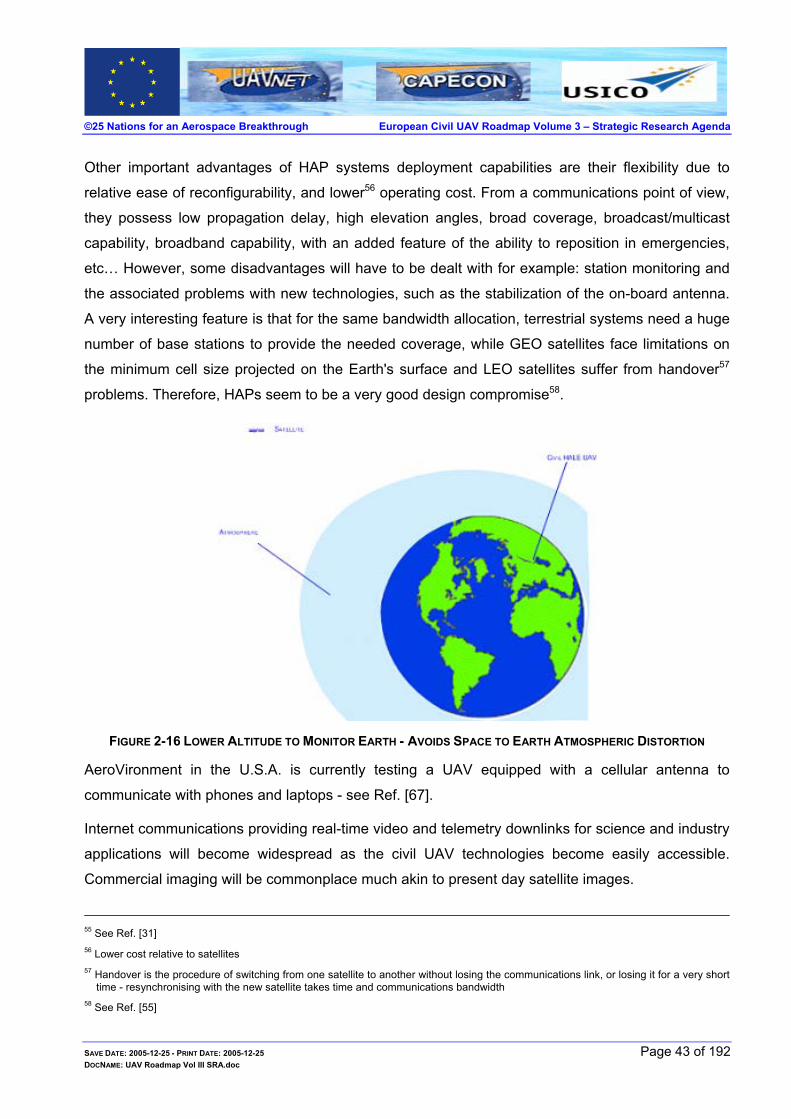
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Other important advantages of HAP systems deployment capabilities are their flexibility due to
relative ease of reconfigurability, and lower56 operating cost. From a communications point of view,
they possess low propagation delay, high elevation angles, broad coverage, broadcast/multicast
capability, broadband capability, with an added feature of the ability to reposition in emergencies,
etc… However, some disadvantages will have to be dealt with for example: station monitoring and
the associated problems with new technologies, such as the stabilization of the on-board antenna.
A very interesting feature is that for the same bandwidth allocation, terrestrial systems need a huge
number of base stations to provide the needed coverage, while GEO satellites face limitations on
the minimum cell size projected on the Earth's surface and LEO satellites suffer from handover57
problems. Therefore, HAPs seem to be a very good design compromise58.
FIGURE 2-16 LOWER ALTITUDE TO MONITOR EARTH - AVOIDS SPACE TO EARTH ATMOSPHERIC DISTORTION
AeroVironment in the U.S.A. is currently testing a UAV equipped with a cellular antenna to
communicate with phones and laptops - see Ref. [ 67].
Internet communications providing real-time video and telemetry downlinks for science and industry
applications will become widespread as the civil UAV technologies become easily accessible.
Commercial imaging will be commonplace much akin to present day satellite images.
55 See Ref. [ 31] 56 Lower cost relative to satellites 57 Handover is the procedure of switching from one satellite to another without losing the communications link, or losing it for a very short
time - resynchronising with the new satellite takes time and communications bandwidth 58 See Ref. [ 55]
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 43 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Currently studies are taking place to establish the effects of electromagnetic radiation (EMR)
caused by cell phones on health. It is thought that using HAP based antennas will attenuate the
overall EMR.
FIGURE 2-17 HALE - STATIONARY HIGH ALTITUDE RELAY PLATFORM CONCEPT
Lighter than air (LTA) High Altitude Platforms (HAP) – see Figure 2-18 may complement proposed
civil HALE UAV platforms. These platforms are more difficult to position in required locations, due to
the acute constraints on the “takeoff” and “landing” phases coupled with the energy required to
counter the winds at the altitude, for station keeping. Traversing the atmosphere to the required
altitude and position is also complicated because of the inherently large surface area of the LTA
platform.
FIGURE 2-18 EXAMPLES OF LTA’S - HIGH ALTITUDE PLATFORM STATION59
59 See Ref. [ 30, 32]
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 44 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
TABLE 2-1 BASIC CHARACTERISTICS OF TERRESTRIAL WIRELESS, SATELLITE, AND HAPS SYSTEMS60
Issue Terrestrial wireless Satellite High Altitude Platform Availability and cost of mobile terminals
Huge cellular/PCS market drives high volumes resulting in small, low-cost, low-power units
Specialized, more stringent requirements lead to expensive bulky terminals with short battery life
Terrestrial terminals applicable
Propagation delay
Low Causes noticeable impairment in voice communications in GEO (and MEO to some extent)
Low
Health concerns with radio emissions from handsets
Low-power handsets minimize concerns
High-power handsets due to large path losses (possibly alleviated by careful antenna design)
Power levels like in terrestrial systems (except for large coverage areas)
Communications technology risk
Mature technology and well-established industry
Considerably new technology for LEOs and MEOs; GEOs still lag behind cellular/PCS in volume, cost and performance
Terrestrial wireless technology, supplemented with spot-beam antennas; if widely deployed, opportunities for specialized equipment (scanning beams to follow traffic)
Deployment timing
Deployment can be staged, substantial initial build-out to provide sufficient coverage for commercial service
Service cannot start before the entire system is deployed
One platform and ground support typically enough for initial commercial service
System growth Cell-splitting to add capacity requiring system reengineering: easy equipment upgrade/repair,
System capacity increased only by adding satellites; hardware upgrade only with replacement of satellites
Capacity increase through spot-beam resizing, and additional platforms; equipment upgrades relatively easy
System complexity due to motion of components
Only user terminals are mobile
Motion of LEOs and MEOs is a major source of complexity, especially when inter-satellite links are used
Motion low to moderate (stability characteristics to be proven)
Operational complexity and cost
Well-understood High for GEOs, and especially LEOs due to continual launches to replace old or failed satellites
Some proposals require frequent landings of platforms (to refuel or to rest pilots)
60 See Ref. [ 55]
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 45 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Issue Terrestrial wireless Satellite High Altitude Platform Radio channel "quality"
Rayleigh fading limits distance and data rate, path loss up to 50 dB/decade; good signal quality through proper antenna placement
Free-space-like channel with Ricean fading; path loss roughly 20 dB/decade; GEO distance limits spectrum efficiency
Free-space-like channel at distances comparable to terrestrial
Indoor coverage Substantial coverage achieved
Generally not available (high-power signals in Iridium to trigger ringing only for incoming calls)
Substantial coverage possible
Breadth of geographical coverage
A few kilometres per base station
Large regions in GEO (up to the 34% of the earth surface); global for LEO and MEO
Hundreds of kilometres per platform (up to 200km)
Cell diameter 0.1–1 km 50km in the case of LEOs. More than 400km for GEOs
1–10 km
Shadowing from terrain
Causes gaps in coverage; requires additional equipment
Problem only at low elevation angles
Similar to satellite
Communications and power infra-structure; real estate
Numerous base stations to be sited, powered, and linked by cables or microwaves
Single gateway collects traffic from a large area
Comparable to satellite
Esthetical issues and health concerns with towers and antennas
Many sites required for coverage and capacity; “smart” antennas might make them more visible; continued public debates expected
Earth stations located away from populated areas
Similar to satellite
Public safety concern about flying objects
Not an issue Occasional concern about space junk falling to Earth
Large craft floating or flying overhead can raise significant objections
Cost Varies More then $200 million for a GEO system. Some billion for a LEO system (e.g., $5 billion for Iridium, $9 billion for Teledesic)
Unspecified (probably more than $50 million), but less than the cost required to deploy a terrestrial network with many base stations
Employing civil UAV communication using spatial division multiple access (SDMA), will allow
another method of increasing communication link efficiency. SDMA divides the bandwidth
frequency as a function of geographical space. By using this technique, identical frequencies can
be used for users situated in different geographical locations. Currently the National Institute of
Standards and Technology (NIST) of the U.S. is about to release an atomic clock the size of a grain
of rice and powered by conventional AA batteries. Frame time synchronisation of mobile phone cell
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 46 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
base stations will be easily achievable by adding these atomic clocks to the civil HALE UAV. These
atomic clocks act as pulse generators for the cell base stations. Using this same technique, in the
future, the system can be further developed to use civil HALE UAVs to communicate via an inter-
HALE” network. Once this system is operable, considerable reduction in bandwidth requirements
will be achieved across the globe. This will be relatively cheaper to implement than the LEO inter-
satellites proposed – see Ref [ 43].
Under sea telecommunications cables require constant very deep-sea diving robots to maintain the
repeaters performance. “As the demand for undersea cables continues to grow and cable maintenance
becomes ever more complex61”, a system based on the HALE/HAP technologies, could complement
the existing undersea cable network. Today rerouting audio traffic via satellite when the undersea
cable is severed is routine, so why not have HAPs (HALEs or LTAs) carry this out more efficiently?
FIGURE 2-19 ALTERNATIVE TELECOMMUNICATION LINK TO UNDERWATER CABLES
2.3.4 GMES Civil UAVs can participate in the GMES62 project by offering high-resolution images – as “low flying
stationary satellites” or pseudo-satellites. These civil UAV technologies will offer cheaper
alternatives to satellite technologies. They will have the inherent advantage of less expensive
technological updates with the latest technology available soon after development. More important
is the image resolution obtained from civil HALE UAVs compared to satellites. Whereas satellite
imagery has to compensate for atmospheric scintillation and other anomalies by means of on board
processors, civil UAVs have far less atmospheric distortion to compensate. This makes them far
more effective in GMES applications. Once these technological advantages are coupled with cost,
61 Universal Jointing Consortium for undersea cables 62 GMES is a joint initiative of the European Commission and the European Space Agency, designed to establish a European capacity
for the provision and use of operational information for Global Monitoring of Environment and Security.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 47 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
civil UAVs make more efficient GMES platforms. Resolution is enhanced without the bandwidth
penalty usually associated with these applications. In addition, for the same bandwidth added
security to the data and control link may be included. This will lead to direct benefits in link budget
management that will be more efficiently used.
A major advantage civil HALE UAVs is their inherent repositioning capabilities, which satellites do not have63.
2.3.5 Scientific and Earth Observation In July of 2003, the first Earth Observation Summit was held in Washington, DC USA, initially with
representatives from 34 nations and by the second meeting, this increased to 61 representatives.
The purpose of the summit was to:
Promote the development of a comprehensive, coordinated, and sustained Earth observation system or systems among governments and the international community to understand and address global environmental and economic challenges.
Begin a process to develop a conceptual framework and implementation plan for building this comprehensive, coordinated, and sustained Earth observation system or systems.
Monitoring and mapping the magnetic, radiological, gravimetric signals of the Earth will give
scientists a better understanding of weather and atmospheric patterns.
Weather has an enormous influence on human activities. Agriculture needs favourable weather;
severe weather can disrupt practically any enterprise and endanger human life – e.g. Tornado,
blizzards, floods, landslides, and earthquakes and other disruptive weather. The weather affects the
economy especially when people cannot travel to work. Accurate forecasts can save lives by
providing the advanced notice necessary to take measures to protect lives and livestock.
Understanding the climate and the weather is vital and an ad-hoc team is preparing a ten-year plan
to implement the outcome of the Earth Observation meetings. The plan being formulated is to
include at least weather monitoring, climate and air quality in order to formulate the sensing
requirements to improve present day weather models and near-Earth activities.
63 Repositioning of a satellite orbit is possible, however, heavy energy and positioning penalties are incurred.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 48 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
The action required is:
Significantly advance the collective ability of Earth observation
Set up an Earth Observation System – see Figure 2-20, for Europe
This is to be carried out at four unique vantage points:
Surface-based
Sub-orbital
Near space
Far space TABLE 2-2 RELATIVE IMPORTANCE - ILLUSTRATIVE LIST OF EARTH OBSERVATIONS & SOCIETAL BENEFIT AREAS64.
The benefits obtained by improving these models include: understanding the climatic behaviour
improving on short and long term weather predictions, climate prediction and the effects of
atmospheric chemistry on air quality and the environment.
64 See Ref. [ 66]
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 49 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
FIGURE 2-20 REQUIRED ATMOSPHERIC SOUNDINGS ABOVE EUROPE65
2.3.5.1 Earth Observation
Europe should create a specialized plan to optimise its global observations of the atmosphere, land and oceans.
The objective of Earth observation is to provide information of the Earth’s atmosphere that will
enable us to understand the Earth we live on and facilitate the reduction
in loss of life and property damage. This can be carried out by: more
accurate weather prediction, a more thorough understanding of the
environmental effects on human health and the human impact on the
environment. This will allow scientists to understand, assess, predict,
and mitigate these effects. In addition, efficient support of sustainable agriculture and forestry, and
prevention of land degradation will be made possible. A superior ability to predict ecological
forecasts will be achieved, through further modelling made possible by measurements that are
more accurate.
In addition, by monitoring the Earth’s resources, steps may be taken in order to safeguard and
manage Earth resources and protect our finely balanced ecosystem. Improving the data collection
process will lead to an increased understanding of how hazards evolve, and will permit mitigation of
their possible damage. The monitoring process will involve a continuous interaction between the
scientific research community that is building and refining the atmospheric models, and the data
acquisition communities. This will ease the overall definition of critical scientific and engineering
issues. A wide range of concepts for national and international observation systems will be
examined. These concepts will be validated, in order to refine the data acquisition and other system
aspects, by means of modelling and simulations. This will help in identifying critical parameters and
variables, including such elements as water in all its phases, wind, aerosols, and chemical
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 50 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
65 Source - European Centre for Medium Range Weather Forecasting

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
constituents and other variables related to phenomena which is present in near-Earth space, all on
spatial and temporal scales relevant to forecasts and related applications. Hurricanes and other
climatic phenomena should be intensively studied to provide a deeper understanding of their
sources and behaviour.
FIGURE 2-21 EXAMPLE OF AN ATMOSPHERIC MODEL66
Models such as that present in Figure 2-21 could be made more accurate once the data acquired
through the Earth Observation Monitoring system is correlated.
Furthermore, a correlation of the Earth's surface data obtained for geological studies could be made
in order to identify possible links.
2.3.5.2 Weather – Modelling Earth’s Climate Earth’s climatic changes have a tremendous impact on our health and daily lives, affecting the
purity of the air we breath; unexpected drought or intensive rainfall affects
agriculture, forestry, water resources, desertification, coastal area changes and
species and natural area erosion.
Civil UAVs could be used to fly operations to collect much more data on
different Earth parameters. Monitoring Earth’s designated key parameters, as scientists see them,
could allow them to evaluate critical environmental behaviour, allowing the Earth’s climate to be
modelled more precisely – see Figure 2-22.
The main aim is to minimise the negative effects of weather on human life and technology. In order
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 51 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
66 http://www.climatescience.gov

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
to achieve this, and to eventually be able to forecast key aspects of the near-Earth space
environment, progress on the following aspects should be attained:
an understanding of the physical events and patterns of the near-Earth system so that models can be developed to facilitate enhanced prediction of weather behaviour
Develop an infrastructure that will refine the present weather research models Permit long-term weather forecast – 5-10 years forward Acquire current data to validate and refine the weather models Atmospheric observations and modelling of the effects of the stratosphere on various
aspects of climate Analysis to determine how stratospheric change, will affect the chemistry of the
troposphere. Develop strategies to use the models in order to minimise the adverse effects of weather
on humans
FIGURE 2-22 WEATHER DATA AND INFORMATION CRITICAL TO REALIZING OTHER SOCIETAL BENEFITS67
NASA is studying experimental use of UAVs that fly slowly around thunderstorms allowing better
studies of lightning and other weather hazards. NASA has already been using Proteus, a
technologically advanced manned aircraft for their Crystal-Face project – see Figure 2-23, amongst
other older manned aircrafts – see Ref. [ 36]. Understanding the production of cirrus clouds in the
upper tropospheric is seen as essential for the successful modelling of the Earth’s climate. These
flights could easily be carried out by civil HALE UAVs or made possible through extensive use of
civil UAVs specially designed for weather data collection.
67 Improving weather forecasting, a technical reference document
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 52 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
FIGURE 2-23 DATA FROM NASA’S CRYSTAL-FACE PROJECT68
The Atmospheric Radiation Measurement (ARM) Program was created in 1989 with funding from
the U.S. Department of Energy (DOE). Sponsored by DOE's Office of Science and managed by the
Office of Biological and Environmental Research, ARM is a multi-laboratory, inter-agency program,
and is a key contributor to national and international research efforts related to global climate
change. In addition, ARM Enhanced Shortwave Experiment (ARESE), flew unique UAVs in
“stacked formation”, in order to carry out measurements69.
2.3.5.3 Global Warming the Need for Monitoring Greenhouse gases would not be the only data being monitored for global warming. The number of
known parameters that are still not understood far outweighs those understood and are not being
monitored; yet those monitored are associated with the phenomena known as global warming. Of
the twelve parameters measured for atmospheric behaviour, only three are said to be understood –
see Figure 2-24.
68 See Ref. [ 36] 69 See Ref. [ 62]
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 53 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
FIGURE 2-24 UNDERSTANDING OF ATMOSPHERIC VARIABLES70
2.3.5.4 Oceanography
In order to save lives in the future, it is extremely important to gather geological information on volcanoes.
The oceans71 cover 70% of the world's surface and yet are the least explored and least understood
ecosystems on the planet. Oceans, moreover, are sensitive indicators of climate change and
environmental health. Marine areas globally are threatened with a catastrophic confluence of
pressures: over fishing, excess nutrients from sewage and agricultural runoff, toxic pollutants from
giant urban centres, habitat loss, and climate change. In recent years, scientists and policy makers
have been working toward a better understanding of what it will take to
reclaim and protect this most remarkable source of natural wealth.
Civil UAVs could contribute to allow correlation of data obtained by
seaborne platforms from oceanography institutes, with data acquired by
the civil UAV platforms, permitting a comprehensive study of cause and
effect. This will eventually lead to more accurate Earth climatic and atmospheric modelling, thus
increasing the precision of climatic forecast.
70 http://www.climatescience.gov 71 http://ehp.niehs.nih.gov/members/2004/112-8/focus.html
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 54 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
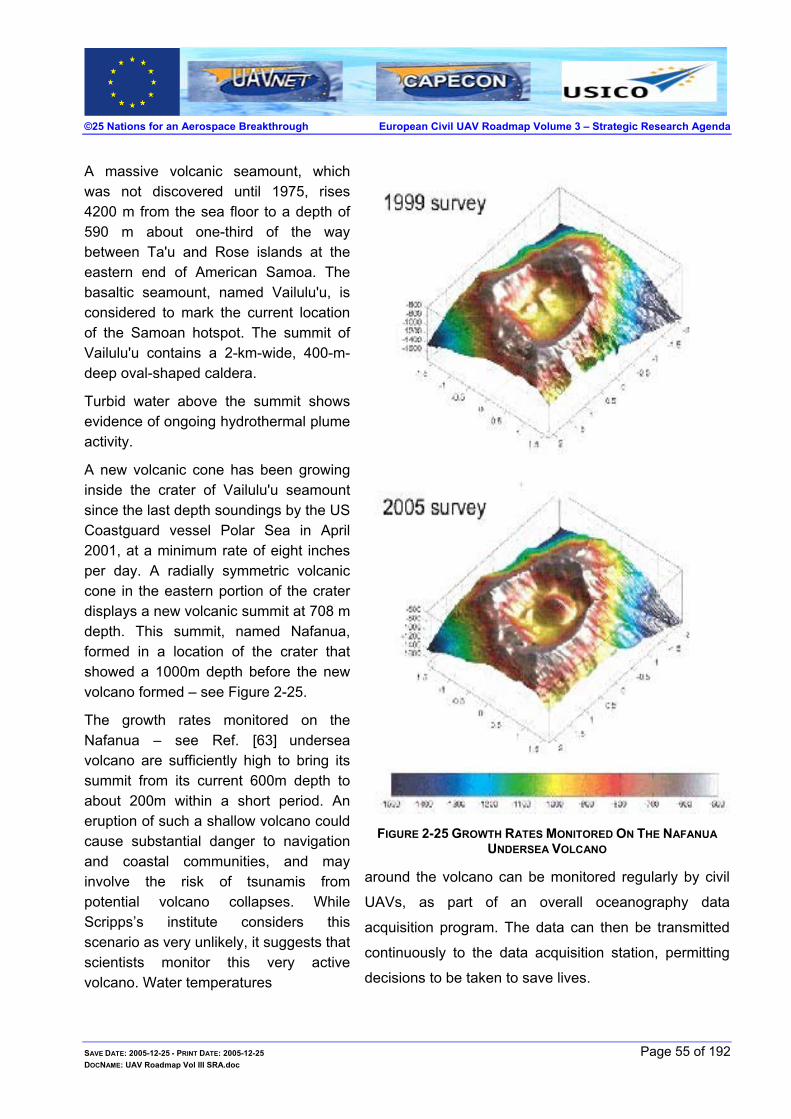
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
A massive volcanic seamount, which was not discovered until 1975, rises 4200 m from the sea floor to a depth of 590 m about one-third of the way between Ta'u and Rose islands at the eastern end of American Samoa. The basaltic seamount, named Vailulu'u, is considered to mark the current location of the Samoan hotspot. The summit of Vailulu'u contains a 2-km-wide, 400-m-deep oval-shaped caldera.
Turbid water above the summit shows evidence of ongoing hydrothermal plume activity.
A new volcanic cone has been growing inside the crater of Vailulu'u seamount since the last depth soundings by the US Coastguard vessel Polar Sea in April 2001, at a minimum rate of eight inches per day. A radially symmetric volcanic cone in the eastern portion of the crater displays a new volcanic summit at 708 m depth. This summit, named Nafanua, formed in a location of the crater that showed a 1000m depth before the new volcano formed – see Figure 2-25.
The growth rates monitored on the Nafanua – see Ref. [ 63] undersea volcano are sufficiently high to bring its summit from its current 600m depth to about 200m within a short period. An eruption of such a shallow volcano could cause substantial danger to navigation and coastal communities, and may involve the risk of tsunamis from potential volcano collapses. While Scripps’s institute considers this scenario as very unlikely, it suggests that scientists monitor this very active volcano. Water temperatures
FIGURE 2-25 GROWTH RATES MONITORED ON THE NAFANUA UNDERSEA VOLCANO
around the volcano can be monitored regularly by civil
UAVs, as part of an overall oceanography data
acquisition program. The data can then be transmitted
continuously to the data acquisition station, permitting
decisions to be taken to save lives.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 55 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Land Volcanic Activity Mapping
A civil UAV flying and monitoring suspected volcanoes, can provide data that can help determine the amount of gases released into the atmosphere and the causes of CO2 gas emissions. In addition, by monitoring volcanoes over a period, correlations between activities may give rise to methods of prediction of future volcanic activities.
For example: in 1986, hot CO2 gases killed 1800 persons in the region of the volcano Lake of Nyos
(Cameroon). Yet, nobody knows whether the source of the gases was the crater itself or lateral
fissures. Similar phenomena killed 37 persons in 1984. A civil UAV monitoring the region could
have changed the situation possibly saving numerous lives.
Mount Pinatubo, which lies on the Philippine island of Luzon, about 100 km northwest of Manila,
erupted in 1991. The eruption was significant in that it progressed slowly to full activity. This allowed
the volcanologists to monitor its behaviour and make successful predictions that saved many
thousands of lives and billions of dollars by timely evacuation. At the same time, the eruption
demonstrated the long-term effects that an eruption can have on a densely populated agricultural
region. Climatologists were able to predict, and then confirm, the effect of a major eruption on
global weather72.
Sea Conditions & Ice Monitoring
Civil UAVs can be used to monitor the sea and ocean in order to provide marine
institutes with: sea state, wind-sea relationships, sea and oceanic currents, leading to
better understanding of the ocean and sea behaviour. The
information may be used to better protect the oceans and seas,
through education.
Civil UAVs will also provide platforms to monitor and predict sea level height and
the effect of polar ice melting patterns. These are also thought to have an impact
on the Earth’s changing climate.
Earth Surface Measurements
Civil UAVs using SAR or differential SAR interferometry will be able to overcome the atmospheric
distortions encountered by satellite borne sensors and will permit measurements of Earth surface
distortions more accurately. In addition, the civil UAV may be brought to the same position time
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 56 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
72 http://www.geology.ucdavis.edu/~cowen/~GEL115/volcs2.html - Chapter Twenty: Explosive Eruptions

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
after time for the required period until the essential data is gathered.
Data acquisition flexibility and image processing will be greatly enhanced using civil UAVs. This is
especially true when the civil UAV will remain on site for as long as is
necessary, which is in sharp contrast to satellites that provide limited time
above the area of interest. Tremendous improvement in signal processing
techniques using PSD techniques when used in conjunction to satellite
produced images and a digital elevation map (Figure 2-31) can be achieved.
Pollution Detection
Today, pollution is far less tolerated than previously, and solutions for monitoring and cleaning are
required. Land pollution monitoring is one of the applications that can be
most readily fulfilled by civil UAVs. Fly tips and other illegal dumping can
be spotted with the offenders immediately identified. This activity will serve
society with the improvement immediately felt; the countryside will be
cleaner and Europe’s heritage kept pristine.
Pollution monitoring is one of the areas of growth for the civil UAV market since more and more
emphasis is being placed on a cleaner atmosphere.
Airborne chemical pollution detection will be made more efficient with civil UAVs and effective
corrective action made possible. Once in place, civil UAVs monitoring
pollution and other gases in the environment will provide a database
of information. This information will provide the details that will aid in
the study of the “cause and effects” of numerous phenomena across
the European continent.
Today one of the companies providing pollution maps is an Italian comp
in the Padova area; an example of a pollution map of Europe is describe
gases that need monitoring include: CO2, NO2, NOX, Methane, HFC’s,
water vapour amongst others, since they are thought to affect the climate
Acid rain is an effect of pollution, which can also be measured ac
permitting the cause and effect to be refined for future prevention – see F
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 DOCNAME: UAV Roadmap Vol III SRA.doc
Once established therest of the world willalso desire such asystem.
any that monitors pollution
d in Figure 2-27. The main
Sulphur Hexafluoride and
and the ozone layer.
curately using civil UAVs,
igure 2-27.
Page 57 of 192

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
FIGURE 2-26 CHEMICAL POLLUTION IN EUROPE73
FIGURE 2-27 A EUROPEAN POLLUTION MAP74 & ACID RAIN RISK AREAS75
Civil UAVs will be the ideal tool to monitor Europe’s gaseous pollution, pinpointing the polluters and
the type of gas being released, in addition to providing Earth science measurements.
2.3.5.5 Radiation Surveillance Civil UAVs will be able to monitor and measure the radiation more effectively than manned flight,
via miniaturised radiation sensitive sensors. These sensors can be designed76 to sample the air and
track radioactive plumes, mapping the radioactive fallout and identifying the source. By utilising civil
UAVs to carry out these missions, dangers and problems arising with manned flight will be avoided.
73 Source: http://europa.eu.int/ 74 Courtesy of TIN - Italy 75 UNEP GRID-Arendal, Ed. Hatier, Paris - European Atlas of Environment and Health project (1998), cartography, Philippe Rekacewicz
76 There exist today sensors that monitor radioactive plumes, whilst others are being developed and miniaturised – see Ref. [ 42],
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 58 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
FIGURE 2-28 CURRENT EUROPEAN NUCLEAR POWER STATIONS & CONTAMINATION FROM CHERNOBYL77
The Chernobyl disaster put in jeopardy the pilots that were required to fly aircrafts to measure the
radiation effects. The radiation levels were so high that within an hour of flight in the proximity of the
plume, the radiation measured on the aircraft was as high as that of the plume being measured.
It must be noted that these are only some of the problems associated with radiation measurements
using piloted aircraft.
A quick look at Figure 2-28 shows how crucial monitoring radiation is to European health.
Moreover, possible emergencies78 may arise from:
An accident in a nuclear power plant
An accident on a nuclear-powered ship or submarine
Terrorism
An accident with nuclear weapons
An accident during transportation of nuclear fuel or waste
Smuggling of nuclear materials
2.3.5.6 Hydrocarbon Spillage at Sea Oil spillage is another form of pollution, caused by tankers intentionally dumping residues into the
sea – see Figure 2-29. The challenge of monitoring oil spillage involves two basic approaches:
either a flight out to sea to identify the sources of the oil pollution once it has reached the beaches,
or more effectively the deterrence caused by civil UAVs monitoring 24/779. The latter approach will
protect beaches along Europe’s coastline with all the associated wildlife. In a civil UAV capabilities
demonstration monitoring the coast, an oil tanker was inadvertently spotted dumping oil in the sea
and was apprehended. Once civil UAV coastal and sea patrols become common, oil dumping at
77 See Ref. [ 78] 78 See Ref. [ 79] 79 24 hours a day 7 days a week.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 59 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
sea is likely to lessen.
FIGURE 2-29 OIL AT SEA80 THE EFFORTS INVOLVED
2.3.5.7 GIS81 - Terrain Mapping - Landslides & Earthquakes Civil UAVs will be able to provide an “on-call” platform to supply the most up to date GIS
information. The choice of civil UAV will mainly include the HALE civil UAV type, but can even
involve small and MALE civil UAVs, to complement the civil HALE UAV. Remote sensors such as
the Light Detection And Ranging (LIDAR) data is often used to carryout validation of flood and
landslide modelling, and may be used in conjunction with the civil UAV to provide an accurate and
current data set.
The River Arno winds its way seaward through the tranquil countryside of Umbria and Tuscany, but
there is an inherent potential danger of landslides. There are more than 300 areas within Italy's
Arno Basin at high risk of landslides, and over 20 000 individual landslides have been recorded.
Italy's combination of geography, geology and climate makes it one of Europe's most landslide-
prone territories, with an average of 54 lives lost each year in the last half century82.
80 Source http://europa.eu.int/ 81 Geographic Information System - GIS 82 http://news.eoportal.org/research/050404_tuscany.html
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 60 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
FIGURE 2-30 GEOGRAPHICAL LOCATION OF THE ARNO RIVER BASIN (LANDSAT TM7 RGB 457 COMPOSITE).
The red spots on the rightmost map of Tuscany are recorded landslides occurring in the Arno River
Basin, and are overlaid on a digital elevation model of the region.
The ESA-funded Service for Landslide Monitoring (SLAM) is being applied to the densely populated
Arno Basin. More than 350 satellite images of the region, taken by
ESA’s ERS satellites, have been combined with ground-gathered data
to generate detailed information, in order to identify and assess slope
instability and risk across 8,830 square kilometres of territory.
Civil UAVs monitoring this region can complement the data gathered
enhancing the accuracy and allowing a better understanding of when a possible landslide may
occur.
The civil UAV can offer a wide range of payloads to provide geologists with the required information on hand all the time in real time.
Many areas of landslides are inactive during dry times and move only during or following extended
periods of infiltration from rain or melting snow. Increased water pressure in the ground reduces the
overall strength of hillsides and starts a downslope movement83.
FIGURE 2-31 LANDSLIDES IN TUSCANY – INSAR ENABLES GROUND MOVEMENT DETECTION
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 61 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
83 See Ref. [ 64]

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Landslide speed and potential destructiveness can vary widely, with some landslides moving
slowly, travelling only a few inches in many days, whilst others transforming suddenly into mud or
debris flows that travel thousands of meters in a matter of minutes, and cause massive destruction
that kill people. Careful monitoring can determine the speed of landslide movement and can detect
early indications of catastrophic movement. Using real-time data from such slides, geologists can
anticipate possible catastrophic movement. Monitoring focuses on detecting: precipitation and
ground-water conditions that could destabilise a hill slope, acceleration of slide movement, and
ground vibrations associated with movement.
2.3.6 Mineral Exploration Civil UAVs using Hyper-spectral and multi-spectral imagery can offer numerous mining and
exploration aids. Using civil UAVs will allow the optimisation of exploratory mining to reach required
minerals.
2.3.6.1 Mining Exploration The application of civil UAVs to perform remote sensing together with image processing techniques
will provide data on: magnetic, gravity, and electrical composition of minerals prior to their
exploration and exploitation. An added outcome could be concurrent management of a geographic
information system (GIS). In addition, minerals and deposits formed by volcanic eruptions could be
used to predict future eruptive processes and mechanisms of mineral deposit and emplacement
with the relative landforms produced. Development of new systems to identify mineralization
mechanisms and alteration processes associated with hydrothermal systems in submarine
environments84 and the application of information gained from these systems to exploration will be
facilitated by the constant monitoring and measurements afforded by civil UAV systems.
2.3.6.2 Mining Effects – Underground Fires Underground fires contribute to more than 3% of all CO2 gas emissions into the atmosphere, and
since coal fires are dangerous to approach, and typically burn underground, predicting where they
will spread has been a major challenge. Civil UAVs can play an important part in identifying these
underground fires and may even play a part in extinguishing them in the future.
Financially these underground coal fires are disastrous. In China, one billion tonnes of coal are
mined each year - half of all world production. However, coal fires burn up between 10 and 20 per
cent of the national production each year. A team from the Netherlands studied the environmental
84 See on page 55 Figure 2-25
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 62 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
effects of underground fires in China - especially in remote areas like northern China, concluding
that the fires release up to 360 million metric tons of carbon dioxide each year, equal to two to three
percent of global carbon dioxide releases, further adding to global warming.
Fires are blazing in underground coal seams around the globe, sending tons of soot, toxic fumes
and greenhouse gases into the atmosphere.
Major underground fires are burning in all of the world's coal producing nations, with the worst
blazes found in countries such as China, India, Indonesia and Australia – see Figure 2-32. Smaller
fires - some of them decades old - are also burning in areas of the United States including Colorado
and Pennsylvania.
FIGURE 2-32 1997 NORTHWEST AUSTRALIA85
These fires threaten the environment and human health, as was stated by scientists at the
American Association for the Advancement of Science (AAAS) Annual Meeting in Denver. Although
some coal fires can be impossible to extinguish, new technologies provide hope that experts may
someday be able to control them, if not extinguish them completely. These fires can burn
unchecked for decades.
2.3.7 Agriculture, Forestry & Fisheries Efficient use of civil UAVs will provide an ideal method of improving agricultural land usage and
crop yields, saving on runoff, water and excess fertiliser use. In addition, the
farmers will be able to harvest crops at their optimum, enhancing the methods
presently used.
The fisheries industries have been going through quite an upheaval, with the “cod
wars” in the seventies and present over-fishing, which is a major concern to the Earth’s ecological
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 63 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
85 The pattern of fires that ravaged northern Australia in 1997. Image generated by WA Department of Land Administration – satellite
images

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
balance. Over-fishing has become such a problem that International Plans of Actions (IPOA) are
being prepared and implemented86.
2.3.7.1 Agricultural Survey Future agricultural applications using a variety of payloads and civil UAV platforms will be common.
The flexibility offered by the civil UAVs will provide farmers and agronomic researchers tools to
increase agricultural efficiency - see Figure 2-33 for examples of agricultural land monitoring.
A few advantages include:
Increase crop yield
Monitor effects of the fertilisation, herbicides and pesticides
Effective weed management
Manage efficiently the crop planting according to optimum soil temperature
Optimally provide indications for crop conditions prior to pruning and harvesting
FIGURE 2-33 VISUAL, INFRA-RED AND MULTI-SPECTRAL AGRICULTURAL MONITORING
2.3.7.2 Civil UAV Applications in Forestry A range of civil UAVs using sensors such as LIDAR or multi-spectral sensors will be able to provide
accurate data and details of canopy structure that will aid the effective
management of forests throughout Europe. As new technologies in payloads
and more sophisticated techniques in signal processing are made available,
details of vegetation biomass, tree height, density and health, timber volume,
soil type, leaf conditions and other similarly necessary data, will be readily
86 The IPOAs were developed as the COFI Members in 1997 found that it would be necessary to have some form of international
agreement in order to manage the concerned issues in compliance with the Code of Conduct for Responsible Fisheries. The most suitable instrument for each of the three issues was found to be a voluntary International Plan of Action (IPOA). The three texts were developed in the course of two intergovernmental meetings, open to all FAO Members, held in 1998. The IPOAs were adopted by the twenty-third session of the FAO Committee on Fisheries in February 1999 and endorsed by the FAO Council at the session it held in June 1999.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 64 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
available to the forest manager.
Civil UAV systems will allow forest inventory to be carried out far more easily than the present day
use of satellite imagery. Real-time data will be made available to all those requiring it for forest
management, making their work more efficient and reliable. The forest health will be readily
monitored and at the same time, anomalies will be quickly identified.
With the present increases in human population and economic development, a stress on the natural
resources is taking place, from food, wood fibre, pleasure excursions to other public demands.
Land use has become a premium issue, demanding precision utilisation of fertilizers, herbicides,
pesticides, and improved genotypes on farms and forests.
In order to meet these demands on the land, the land manager must have access to precise and
up-to-date information on the condition of their fields and forests.
Civil UAVs will provide a solution towards effective land management by providing the platforms
coupled with the required payload to provide the necessary remote sensing application.
This in turn will provide part of the tools needed to monitor urban and suburban growth patterns and
relations to environmental effects on the natural forests, agricultural and land resources.
2.3.7.3 Fisheries Protection and Commercial Fishing Commercial fishing is now suffering from over-fishing, which is presently suspected of changing the
ecological balance in the seas and oceans. Currently, more untargeted catches of species
“bycatch”, is taking place, with more deep Ocean fish species appearing on fish markets. “Over-
fishing is one of the primary causes of marine ecosystem
collapse87”.
Estuary water pollution outlet to the sea, which pollutes the sea
and ocean, is more common today.
Recent advances in lasers, spectrometers, and multi-channel detectors have significantly improved
the capabilities of LIDAR systems in the blue-green region of the electromagnetic spectrum.
Because ocean water has minimum absorbance in the blue-green region of the spectrum, the
LIDAR has great potential to become a versatile tool capable of providing the kind and the quantity
of biomass and water quality (including temperature) data that have been thus far inaccessible to
fisheries scientists. Maximum efficiency will be achieved, by placing LIDAR or similar type payloads
on civil UAVs. Fish shoals will be better protected from over-fishing and the fisheries industries as a
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 65 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
whole will be better protected through shoal monitoring and fishing control.
2.3.8 Surveillance & Security Since the terrorist attacks on 9/11 in New York and the Madrid bombing, homeland security and law
enforcement has received high priority. Personal security has become an issue that has come to
the forefront of discussions. It is therefore natural to use the most sophisticated tools available to
combat terror and crime, providing Europe’s law-abiding citizens tranquillity and safety.
The security threats presented88 in Figure 2-34 with the expected casualty and economic impact
presented in Figure 2-35, at a UAVNET workshop in January 2004 by Frost & Sullivan, show that
out of the ten threats presented six of them can be mitigated using civil UAVs. Furthermore, Frost &
Sullivan published a civil UAV capability graph as a function of threats – see Figure 2-36 and Figure
2-37. It is clear that civil UAVs when used will benefit the citizen.
FIGURE 2-34 SECURITY ASSESSMENT - SOST PROBABLE THREATS
FIGURE 2-35 EXPECTED CASUALTY AND ECONOMIC IMPACT
The trend lines in the graphs described in Figure 2-36 and Figure 2-37 show that with investments in research and development, the civil UAV becomes a key factor in prevention and response to threats.
87 Jeremy Jackson et al., Scripps Institution of Oceanography. 88 See Ref. [ 71]
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 66 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
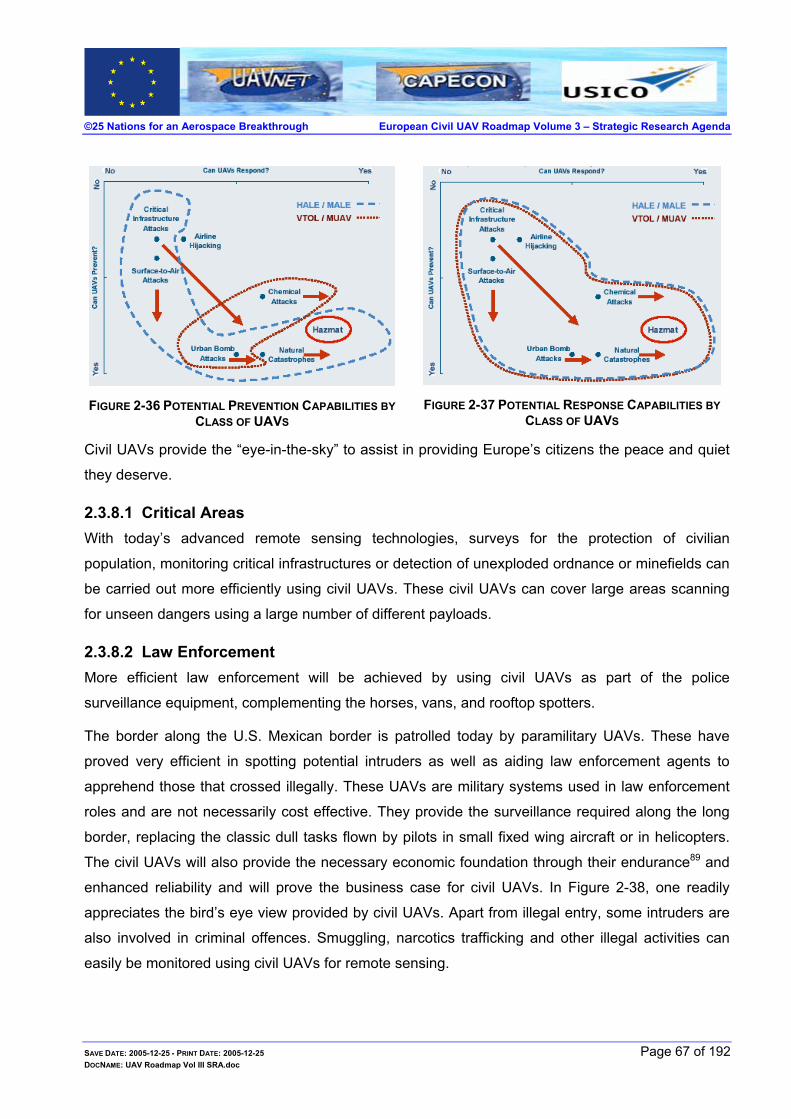
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
FIGURE 2-36 POTENTIAL PREVENTION CAPABILITIES BY CLASS OF UAVS
FIGURE 2-37 POTENTIAL RESPONSE CAPABILITIES BY CLASS OF UAVS
Civil UAVs provide the “eye-in-the-sky” to assist in providing Europe’s citizens the peace and quiet
they deserve.
2.3.8.1 Critical Areas With today’s advanced remote sensing technologies, surveys for the protection of civilian
population, monitoring critical infrastructures or detection of unexploded ordnance or minefields can
be carried out more efficiently using civil UAVs. These civil UAVs can cover large areas scanning
for unseen dangers using a large number of different payloads.
2.3.8.2 Law Enforcement More efficient law enforcement will be achieved by using civil UAVs as part of the police
surveillance equipment, complementing the horses, vans, and rooftop spotters.
The border along the U.S. Mexican border is patrolled today by paramilitary UAVs. These have
proved very efficient in spotting potential intruders as well as aiding law enforcement agents to
apprehend those that crossed illegally. These UAVs are military systems used in law enforcement
roles and are not necessarily cost effective. They provide the surveillance required along the long
border, replacing the classic dull tasks flown by pilots in small fixed wing aircraft or in helicopters.
The civil UAVs will also provide the necessary economic foundation through their endurance89 and
enhanced reliability and will prove the business case for civil UAVs. In Figure 2-38, one readily
appreciates the bird’s eye view provided by civil UAVs. Apart from illegal entry, some intruders are
also involved in criminal offences. Smuggling, narcotics trafficking and other illegal activities can
easily be monitored using civil UAVs for remote sensing.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 67 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
FIGURE 2-38 BORDER PATROL AGENT ESCORTING ILLEGAL ALIENS
Civil UAVs will also provide precise and real-time imagery information, which can be rapidly
disseminated, permitting informed decisions to be taken regarding prompt deployment of the border
patrol agents.
2.3.8.3 Port Security Civil UAVs will provide constant port security that includes the approaches to the port. This is
presently carried out in the framework of maritime control. This task can
be easily moved to civil UAVs, alleviating the mundane part of the work
and providing 24 hours a day, 7 days a week, all year round coverage.
Monitoring the port approaches remotely will provide an efficient use of
human resources, by reducing their number during the periods of normal operation and increasing
the number as required in emergencies. This is different from current resource levels necessary to
protect the port – see Figure 2-39. In addition, the ship-related resources would then be optimised,
since they will be positioned where necessary.
FIGURE 2-39 MONITORING SEA APPROACHES
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 68 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
89 Forty to fifty hour flights should be common once research and development into reliability issues is undertaken

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
2.3.8.4 Wreck Site Monitoring Wreck site monitoring has been a concern for the UK Maritime and Coast Guard Agency. Civil
UAVs with their sensor suite will provide the necessary flexibility required to monitor wrecks 24
hours 7 days a week as required by the authorities. This will directly aid
authorities, insurance companies and shipping companies.
2.3.8.5 Coastal Monitoring Civil UAVs will offer a superior form of coastal monitoring, providing round
the clock surveillance throughout the year. The civil UAVs will remove the
mundane nature of coastal monitoring and when coupled with high-
resolution sensors will be able to enhance today’s efforts at coastal monitoring. Furthermore, the
sensors used will provide additional value to the earth science research, since sensor data will be
collected and will be readily available.
Coastal erosion, land mass movement, vegetation fluctuations may now be monitored closely and
effectively. Local sea state and local wind speed will be available and correlated to the coastal data,
providing another source of data for climatic behaviour modelling. Cliff erosion and its effect on the
coastline will be studied in detail. These are acute problems today, especially on the channel coast.
Coastal surveillance/maritime traffic control missions, including search for and detection of ships,
prevention of oil pollution in emergency situations in ports, maritime boundary surveillance and
fishery control in the vicinity of the coast.
2.3.8.6 Urban Monitoring Civil UAVs will provide another alternative to urban monitoring enhancing
the safety of Europe’s citizens, augmenting police patrols. Civil UAVs will
aid in allowing emergencies to be dealt with more efficiently providing real-
time pictures to the rescue services and in crime prevention providing the
required data.
The terrain inspections by civil UAVs will provide up to date images of building sites and monitoring
of urban building encroachment. Using the latest platform technologies on civil UAVs the town
planners can better monitor current land usage, spotting illegal expansion and effectively plan the
town.
2.3.8.7 Traffic and Car Park Monitoring Civil UAVs will be able to deliver the essential data to the authorities efficiently, enabling them to
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 69 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
receive the data wherever and whenever required.
The civil UAV provides a very flexible tool for traffic monitoring. Civil HALE or MALE UAVs can be
combined with mini/small UAVs to provide rapid response to accidents and other traffic related
incidents. It has been reported that satellite imagery is being studied to monitor traffic90. This is a
very expensive traffic monitoring station, since a variety of civil UAVs can perform this task without
satellite type costs91.
When considering civil UAV applications for traffic monitoring: civil small UAVs can be used for
localised incidents, civil HALE UAVs to monitor large areas of interest and civil MALE UAVs used
for mid-range traffic applications. Traffic data as shown in Figure 2-40 will be commonplace with
license plate identification readily available.
FIGURE 2-40 REAL-TIME CAR PARK AND TRAFFIC MONITORING92
2.3.8.8 Structural Inspections Civil rotary UAVs will complement present inspection of dam walls and bridges. These civil rotary
UAVs will make structural inspections using thermal imagery, multi-
spectral and hyper-spectral inspections routine and available.
Present methods are carried out manually and in some cases very
dangerously. The means available in the evaluation of coating
performance, in bridge inspection, is
limited. The search for better
techniques are plagued with problems and they do not have the
capability to provide accurate, quantitative, and consistent
inspection data, thus precluding timely planning of bridge
management and rehabilitation. As well as being a safety hazard to
90 See Ref. [ 47, 51] 91 See on page 40. Figure 2-1392 See Ref. [ 51]
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 70 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
the operator and traffic. All of the other available inspection methods are strictly localized, contact-
point methods, which are ineffective for assessment of global coating
deterioration. Consequently, the infrastructure community93 has been
looking for a more cost-effective, non-destructive instrument and
methodology which would automate the repetitive visual inspection,
improve the quality and reliability of inspection, and provide
quantitative feedback regarding the paint condition.
Flying the rotary UAVs will bring the data to the engineer’s desktop without having to send an
inspector to a dangerous location on a bridge or dam to obtain the data.
2.3.8.9 High Value Critical Infrastructures and Railways With the increase of world terror, high value and critical infrastructures will be monitored using civil
UAVs in a very effective way. Real-time information, on the critical sites, will be available to the
relevant authorities round the clock, ensuring their safety. This may be currently carried out by
manned aircraft, but routine flying over the same areas is a classic task for civil UAVs.
Railways and their open-air urban stations will be monitored readily using civil UAVs in a similar
method as for other applications. With civil UAVs monitoring rail tracks and
stations, a wide coverage will be attained simultaneously. Malfunctions
affecting signals, level crossings, will be readily identified and reduced,
funnelling the present expenses to improving the service provided.
Railway level crossings will be easily monitored for vehicle intrusions providing yet another safety
angle for the railways. Having the condition of railway tracks constantly
under surveillance will optimise security by providing them with exact
locations and type of emergency, helping them prepare the necessary
equipment for the task. This is in sharp contrast to today’s method of
monitoring the tracks periodically by the maintenance crews.
In addition to threats of the malicious type, monitoring the rail tracks can be used to avert train
crashes, which sometimes occur, further increasing public safety. Here the present use of
resources to counter the possible threats may be used more efficiently.
The wide field of view together with multiple payload types provide a very efficient method for
monitoring critical sites and infrastructures. Monitoring critical infrastructures can be carried out
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 71 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
93 See Ref. [ 87]

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
simultaneously because of this flexibility – see Figure 2-41.
FIGURE 2-41 FLEXIBILITY PROVIDED BY CIVIL UAVS FOR MONITORING CRITICAL INFRASTRUCTURES
2.3.8.10 Pipeline and Powerline Monitoring Pipeline Monitoring
Pipeline age and structural condition of the pipelines are causing a rapid market increase in
demand for inspection technology & monitoring services94.
It has been reported, in the CONCAWE report released in May 2005 for the year 200395, that in
terms of spillage96, “Performance in 2003 was better than the long-term average”. The largest spill
reported for 2003, affected no less than 80,000 m2, the second largest area of ground polluted, on
record in Europe. This resulted not only from the size of the spill but also from its location and the
time before detection. It cost more than € 2 million for the clean up operation of that spill.
TABLE 2-3 SUMMARY OF CAUSES AND SPILLED VOLUMES FOR 2003 INCIDENTS
Number of Incidents
Spilled Volume (m3) Average Volume per incident (m3)
Category (by cause)
Pipeline Pump Station
Gross Recovered as oil
Removed Net Loss Gross Net
A. Mechanical Failure 1 0 30 30 30 0 30 0
B. Operational 0 0 0 0 0 0 0 0
C. Corrosion 0 0 0 0 0 0 0 0
D. Natural Hazard 0 0 0 0 0 0 0 0
94 See Ref [ 58] 95 See Ref. [ 81] 96 To appreciate the size of the problem that has to be dealt with see Ref. [ 80]
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 72 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Number of Incidents
Spilled Volume (m3) Average Volume per incident (m3)
Category (by cause)
Pipeline Pump Station
Gross Recovered as oil
Removed Net Loss Gross Net
E. Third Party Activity
9 0 2800 1154 1180 1623 311 180
Total 10 0 2830 1184 1210 1623 283 162
Given the extent of the pipeline infrastructure across the world, and the associated potential
economic losses and threat to lives should there be a mishap, regular pipeline monitoring is a costly
prerequisite. For instance, land movement due to underground mining is common in Europe, which
has numerous mineshafts. This movement sometimes stresses the pipelines near the underground
mines, risking a pipeline rupture.
Pipeline ruptures causing spillages are a long-term health hazard affecting surface water and
underground water sources, in addition to their immediate toxicity.
Civil UAVs can carry out the tasks of pipeline monitoring in a more flexible and efficient fashion.
The civil UAV will provide the latest technological solutions in terms of remote sensing and
coverage, in comparison to the present attempt to use satellite imagery to monitor pipelines.
Recently Europe has invested in projects using satellite based remote sensing. These include the
PRESENSE, PIPEMOD and GMOSS projects, where the conclusions are that more work is
necessary in order to reach the levels of pipeline monitoring required by the pipeline operators97.
For instance, the conclusions of the PRESENSE project necessitates:
1. Better satellite resolution for both optical and SAR sensors
2. A need for an increased number of satellites carrying these SAR and optical sensors
3. Satellite borne LIDAR
4. Lower cost imagery
5. Reduction in false alarms
Moreover, it must be pointed out that methane plumes due to leaks in gas pipelines are very difficult to measure by satellites due to atmospheric absorption.
Urban areas are expanding naturally and pipelines that were once in relatively remote places are
97 See Ref. [ 75]
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 73 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
becoming vulnerable to building construction. Normally, pipelines are buried in well-maintained
utility right-of-ways marked with warning signs. Nevertheless, pipelines are sometimes damaged by
construction equipment not owned by the pipeline company. This is referred to as third-party
damage and is the major cause of damage to pipelines98. A single incident can be devastating,
causing death and millions of dollars in property loss. One highly publicised incident occurred in
Edison, NJ, in 1994. Flames reached 125 to 150 meters into the air close to an apartment complex.
Nearly 100 people were treated in hospitals because of the accident, with damage from the incident
exceeding $25 million99.
The current pipeline situation is such that:
50% of all North American pipelines are over 40 years old (exceeded design life)
20% of Russian pipelines are nearing the end of design life.
US legislation is making it mandatory to have an integrity management methodology; EU legislation is about to issue a similar draft.
Disturbances to the pipeline network by encroachment from human activities, accidental spills, and
landform changes due to fires, floods, land movement and other natural events are major concerns
to the pipeline industry.
For example, the country of Colombia has been experiencing a problem of theft along their state-
controlled (EcoPetrol) gasoline pipelines, losing approximately 100
million U.S. dollars annually due to this problem. They have asked
Space Imaging100 (Thornton, Colorado) to assess the feasibility of using
the IKONOS satellite to monitor activity along the gasoline infrastructure.
For Europe, the satellite solution is not ideal, since the satellite trajectory
is perpendicular to the European pipelines. Thus, since only a fraction of
their operational time is available for monitoring, they are not suited to monitoring the European
pipelines101. In this case, civil UAVs have considerable potential in contributing to pipeline
monitoring tasks, since they have the capability to carry the latest remote sensing payloads and can
fly where needed.
Third-party damage to pipelines remains the biggest single cause of pipeline incidents
worldwide
98 See Ref. [ 76] 99 See Ref. [ 77] 100 Law Enforcement - http://www.imagingnotes.com/winter04/monitoring.htm 101 See Ref. [ 75]
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 74 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Different approaches to minimise the damage caused by third parties to pipelines installing GPS
and a transmitter on all construction equipment and to indicate their current
position on a pipeline GIS based map. This method will trigger an alarm once
the equipment nears a pipeline. In addition to the technical problems that must
be solved, there is an inherent problem due to the reluctance to install such
positioning systems on each piece of construction equipment.
Note: There is no commercially available method for detecting or preventing third party damage acceptable to the pipeline industry.
1. It takes less than thirty minutes for construction equipment to move in and damage a pipeline.
2. Monitoring should be every 30 minutes to avoid possible third party damage.
3. Using satellite monitoring is presently affected by weather and image interpretation. However, work to improve this imagery has begun.
4. Satellite passes are not sufficiently frequent and cannot be obtained on an ad-hoc basis.
Furthermore, regardless of where they are located, pipelines are attractive targets for terrorists and
in many countries, pipelines are prone to product losses via theft. Today there is an increasing
concern of leakages due to the age of the pipelines coupled with the threats from malicious intent.
Europe’s pipelines are widely dispersed across the continent (see Figure 2-42102) and there is a
need to monitor them from a safety and security viewpoint. There has been increased interest in
developing a method for rapid aerial surveying of oil and gas pipelines and civil UAVs will provide
the ideal platform to monitor and provide real-time imagery of their condition.
The main market driver for pipeline monitoring is safety, which is affected by pipeline age and
condition. It is estimated that there is an annual global market for pipeline transmission, of
approximately £1.2 billion103, with the most significant expenditure going to pipeline inspection
services.
102 Courtesy of Ruhrgas AG 103 http://www.uavnet.com/DL/Document_Library/Rochester_Meeting/Pipeline_monitoring_Fraser.pdf
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 75 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Current Pipeline monitoring is accomplished using a variety of methods, a few are noted below:
Foot patrols with dogs to sniff for underground leaks
Divers inspecting the pipeline underwater – where depth permits human inspection104
Pressure sensors on the pipeline
Mechanised patrols with a variety of sensors
Pipe-to-soil electric potentials, using the pipeline’s cathodic protection, at preset test points
Strain monitoring of the pipeline itself – both by continuous and pointwise systems105
Geotechnical monitoring – measures the rock/soil displacement around the pipeline
Acoustic monitoring of the pipeline
"Flying-the-line” in helicopters or fixed wing aircraft with trained observers on board106 - usually 1-2 times per month
FIGURE 2-42 EUROPE’S PIPELINE WITH IDENTIFICATION OF OBJECTS NEAR A PIPELINE TRACK107
Civil UAVs, using sophisticated payloads, will provide the means to survey pipelines effectively
identifying leakages and landslips, effecting pipelines.
For example, it was reported108 – see Figure 2-43, that an underground pipeline network located in
104 There are problems locating deep sea spills, where satellites are either too expensive or are just not available enough, due to the
frequency of coverage 105 Deformation of the pipe due to internal or thermodynamic stresses - it is not efficient in measuring stresses due to geological
movements 106 This is the most common method – see Ref [ 69], even with the inherent concerns of helicopter flights 107 Based on 1 m resolution IKONOS images See Ref. [ 48]
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 76 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
the southwestern United States as shown in Figure 2-43, had been breached in several locations,
two of which are encircled in green. The large circle involved 300-500 barrels (bbl), and the small
circle approximately 20 bbl of hydrocarbons. Neither of these leaks could be easily detectable. The
hydrocarbon concentrations, which were determined from subsequent geochemical sampling, were
of the order of 0.5% carbon and 0.002% sulphur. Though not detectable from the surface, this seep
was easily detectable via Hyper-spectral imaging, particularly in the thermal infrared wavelengths.
Larger pipeline breaks can be averted by detecting leaks while they still have a low magnitude.
FIGURE 2-43 UNDERGROUND PIPELINE LEAKS IN THE SOUTHWESTERN UNITED STATES
By using advanced state-of-the-art algorithms and graphics, it will be possible to avoid pipeline
damage during land development109, through definitions of protected working areas, permitting safe
land development avoiding pipeline damage – see Figure 2-42. Europe can benefit from this type of
technology to protect any sensitive underground infrastructure from inadvertent damage.
Presently, pipeline surveillance is mainly performed by helicopter-based inspection with an
observer reporting pipeline safety110 related events in the neighbourhood of the pipeline, which is
followed by an on-foot ground inspection. In inhabited areas, pipelines are monitored by ground
inspections.
Europe is preparing legislation to ensure a methodology that will ensure monitoring and proper
maintenance of pipelines, due their age and condition. This means that the local European market
of pipeline inspection and monitoring technologies will rapidly increase.
108 See Ref [ 59] 109 There are numerous reported incidents of pipeline damage due to tractors and other land moving equipment working in the pipeline
vicinity. 110 For example an unexpected excavator
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 77 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Powerline Monitoring
Powerline monitoring is carried out by foot patrols and by helicopter inspections. The foot patrols
are very labour intensive and time consuming, whereas the helicopter inspections are expensive. In
addition, helicopters are used to clean the powerline junctions, by jets of liquids, which is a
dangerous task for the helicopter crew. Introducing civil UAVs, that carry remote sensing together
with the cleaning equipment will lower the human risks and will minimise the overall costs involved.
In Figure 2-44 below one readily appreciates some of the challenges involved in powerline
monitoring. The conditions can vary from freezing fog at night to rain and snow. The civil UAV can
enhance the efficiency of this critical work. A cost comparison is shown in section 0 on page 146.
FIGURE 2-44 POWER LINE MONITORING – ASSOCIATED CHALLENGES
2.3.8.11 Fire Related Emergencies & Disaster Management Using civil UAVs in emergencies will optimise the complete emergency response mechanism,
through real-time information on the actual situation. Furthermore, the civil UAVs will
provide superior disaster management. For example, fire fighters are examining the
introduction of small civil UAVs to help manage blazes. The next stage is having
effective monitoring to minimise the response time and hence the size of the fire.
These are actions being taken across the world in a semi-ad hoc fashion. Europe can take the lead here.
Eleven volunteer fire fighters died tackling the blaze on Sunday 20/07/2005, which destroyed
up to 12,000 hectares of pine woodland that threatened the villages of Selas
and Ablanque in Spain.
Europe suffers from forest fires. The reaction time to move the resources into
place is critical and involves two main stages: assembling the resources and
deploying them. Assembling the resources is outside the scope of civil UAVs.
However, moving these resources to the optimum place in order to fight the fire is definitely within
the scope of civil UAVs. Here the information provided by civil UAV remote sensing, will optimise
Forest fires are increasing dramatically over the years and effective solutions must be found.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 78 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
the use of approaches that the resources may use to combat the flames together with data
provided as to the direction the fire is moving and with what intensity. The greenhouse gases
produced by the fire are also a major factor when calculating the damages involved. In addition, the
added damage due to the lack of absorption of the very same gases by the burnt forests should be
considered. Forest fires now release about 150 million tonnes of carbon dioxide a year in Canada.
A civil UAV flying above the forests and providing critical data to the fire fighters will not only save
precious forests, but possibly save lives.
FIGURE 2-45 FOREST SAVED BY USING CIVIL UAVS TO AID COMMANDER OF FIRE FIGHTING TEAM111
The costs involved in a forest fire include clearing the ground for re-plantation of tree saplings and
the cost of the new saplings. This does not take into account the time it takes to have the forest
canopy restored to its pristine condition nor does it consider the disposal problems associated with
removal of the debris and pollution that a forest fire causes. Another point worth mentioning is the
damage to the ecosystem around the forest and the loss of animal and plant life that lived off the
forest and in the undergrowth that is not usually mentioned when calculating the costs due to a
forest fire.
Examining Figure 2-46, one readily sees the advantage provided to the commander in charge of
fire fighting when using an aerial platform, where instead of a very
limited view of what is taking place in the forest fire when at ground
level, the commander gets a bird’s eye view. Smoke and possible
wind will place the pilot and the observer in critical danger112, thus
limiting the use of a manned aircraft. This is not the case when using civil UAVs, which can be
Using civil UAVs, to aidfire-fighting teams, issafer and more efficientthan present methods.
111 See Ref. [ 88] 112 Three pilots lost their lives in the forest fires in 2003 – see “Getting Control” Dec. 2004 - published by the Council of Forest Industries
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 79 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
brought as close as is necessary to provide the required data to the commander of the fire fighting
team.
FIGURE 2-46 COMPARISON OF FIRE MONITORING
2.3.8.12 Human Relief Civil UAV technologies will be able to aid considerably in human relief operations. This initially will
take the form of relief-site monitoring and at a later stage, as the
technology is made available, by dropping relief aid from cargo UAVs,
similarly to what is carried out today by manned aircraft. In addition, the
operation will not be limited by pilot fatigue associated with these types
of applications.
Monitoring wetlands for possible emergencies will be more efficient and
the response to emergencies will be greatly enhanced, by using civil
UAVs. The flexibility offered by the civil UAVs will be readily appreciated when the first one comes
into use. An example already mentioned was the lifesaving missions by UAVs after the Tsunami.
In the future, search missions to remote locations and under adverse conditions will only involve the
civil UAV platform and the “go-ahead” will be not be limited by aircrew safety considerations.
Flood Control
Flooding affects more people worldwide than any other form of natural disaster. Scarcely any other
natural hazard comes in more varied forms than floods. Rivers overflow their banks, city storm
drains become overloaded, coastal dikes give way in the face of a storm surge, waves inundate
coastal areas following a quake, overflowing streams, channels, lakes, etc., precipitation, storm
surge, tsunami, waves or seawater, mudflow, failure of water-retaining structures (dams),
groundwater seepage, water backup in sewer systems overflowing are only a few examples of
flooding.
Overall, there has been a marked rise in the frequency and severity of natural catastrophe losses,
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 80 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
including flood risks, over the last 30 years113. Health hazards follow floods if due care is not taken.
Flooding is becoming more acute than before, in Europe. In 2002, floods were exceptionally
prevalent since they affected an extensive area across Europe from the UK to Spain and as far east
as the Black Sea coast, with 100 fatalities. Economic losses amounted to € 9.2 billion in Germany,
€ 2.9 billion in Austria and € 2.3 billion in the Czech Republic. Total economic damage due to these
floods exceeded € 15 billion114. This flooding occurred for a relatively very short period, between 31
July and 26 August 2002.
FIGURE 2-47 FLOODING IN EUROPE
Real time flood forecasting using civil UAVs together with radar hydrology will be highly effective. Civil UAVs will augment water level measurements and inundation maps that are made
to predict possible flooding. Inundation maps are produced only every 35 days from satellite
imagery, due to the image processing required and the frequency of visits115. A comparison of what
is being used today compared to what is possible with civil UAVs is shown in Figure 2-48 and
Figure 2-49.
FIGURE 2-48 DELINEATION OF INUNDATION MAPS VIA SATELLITE IMAGES
FIGURE 2-49 REQUIRED INUNDATION MAPS MADE POSSIBLE BY CIVIL UAVS
113 Josef Breitsameter, Munich-based natural scientist and expert on flood risk assessment, monitoring flood-stricken regions 114 See - http://www.swissre.com - Swiss Re has been in the reinsurance business since its foundation in Zurich, Switzerland, in 1863. 115 See Ref. [ 84]
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 81 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
In addition, they will certainly provide substantial support to the flood victims and authorities helping
flood victims. This support will come in the form of providing tools for the emergency services to
identify the situation and help detect critical emergencies thus enhancing the efficiency of aid
operation.
2.3.9 Civil UAVs as Nature’s Utensil - Wildlife & Nature Nature may be served significantly through the widespread use of civil UAVs. Benefits to wildlife will
be felt when they will be applied to anti-poaching.
Civil UAVs may be used as effective deterrents against present day poachers. The civil UAVs will
bring about an enhanced method of monitoring the vast areas of natural habitat from a distance
without disturbing the habitat’s natural environment. The nature reserve rangers will be provided
with a real-time view of the area permitting them to efficiently use their resources.
Today in Africa, anti-poaching is achieved by combining foot patrols with cross-country vehicles and
manned aircraft. A more effective method may be to have a civil UAV flying at altitudes that will not
only monitor the area for poachers, but will also provide data to scientists on animal behavioural
changes due to human encroachment.
Bird and animal migration can be better monitored too. A deeper understanding of the cause and
effect can be attained.
At sea, whales, dolphins and other sea creatures can be monitored and studied. A civil UAV can
offer much in this realm alone. If combined with other remote sensing the civil UAV can help
provide a better picture of the world we live in.
Modern laser scanners can monitor fish shoals underwater. This can help curtail the present over-
fishing trend that is taking place across the globe. In addition, these systems can be used to map
the Earth’s surface (ocean and land) to provide the necessary information needed to plan and
restrain present pollution patterns.
2.3.10 Other Commercial Applications There is already limited use of civil rotary UAVs in aerial cinematography using various basic
platforms, though this trend is increasing. The main challenges in this field
are reproducing identical flight paths taken in the “retakes”.
Cinematography UAV applications are presently supported by companies
with expert pilots using specialised civil UAV rotary craft. These
technologies can be improved by, allowing widespread dual use of these platform types to building
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 82 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
inspection or similar roles and with less skilled pilots.
Another application for these types of civil UAVs is news/media work, where a bird’s eye view is
sometimes needed. This alone, is a very broad growth market.
2.3.11 Civil UAV Transport Aircraft Civil UAV transport systems include: cargo civil UAVs and passenger civil UAVs.
Civil UAV Cargo Aircraft
In view of studies116 showing extensive air cargo market growth – see Figure 2-50, the congestion
at major hubs is likely only to increase. There is a growing interest in civil cargo UAVs117, as
passenger airport congestion rises, and an alternative venue for cargo hubs promises to alleviate
the bottleneck.
This requires the cargo aircraft to fly to alternative airports, perhaps even cargo-dedicated airports.
By using civil cargo-UAVs to land on smaller landing strips within industrial estates having minimal
aircraft related facilities, a noticeable reduction in air traffic to and from the main hubs will be
sensed. This alternative solution, which supports civil cargo UAVs will alleviate the increased
passenger congestion expected and Europe will gain by offloading this cargo traffic from the
congested passenger airports to the industrial sites, close to the cargo source and in the future as
this concept takes hold, the cargo destination. Having cargo UAVs landing and taking off from
industrial parks, will reduce the costs involved in transporting the goods from their industrial source
to their destination. This cost reduction will be initially achieved in reducing expenses related to the
outgoing leg. The infrastructure required for “cargo UAV airports”, is minimal compared to
passenger airports. By adding pallet standardisation coupled with robots, to load and unload the
cargo aircraft, the social and economical gains are phenomenal.
116 Source: 1995-2002; U.S. Air Carriers, Form 41, U. S. Department of Transportation, 2003-2014; FAA Forecasts 1/ Historical and
forecast data on a calendar year basis. Domestic refers to U.S. cargo and “system” refers to the total cargo in the transport system. 117 Don Barber, senior vice president at Fed Ex, told ATCA attendees he believes that, though unmanned air freighters "may not be
ubiquitous soon," UAV cargo transport "will be a demonstrated reality" in the near future. See Ref. [ 89]
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 83 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
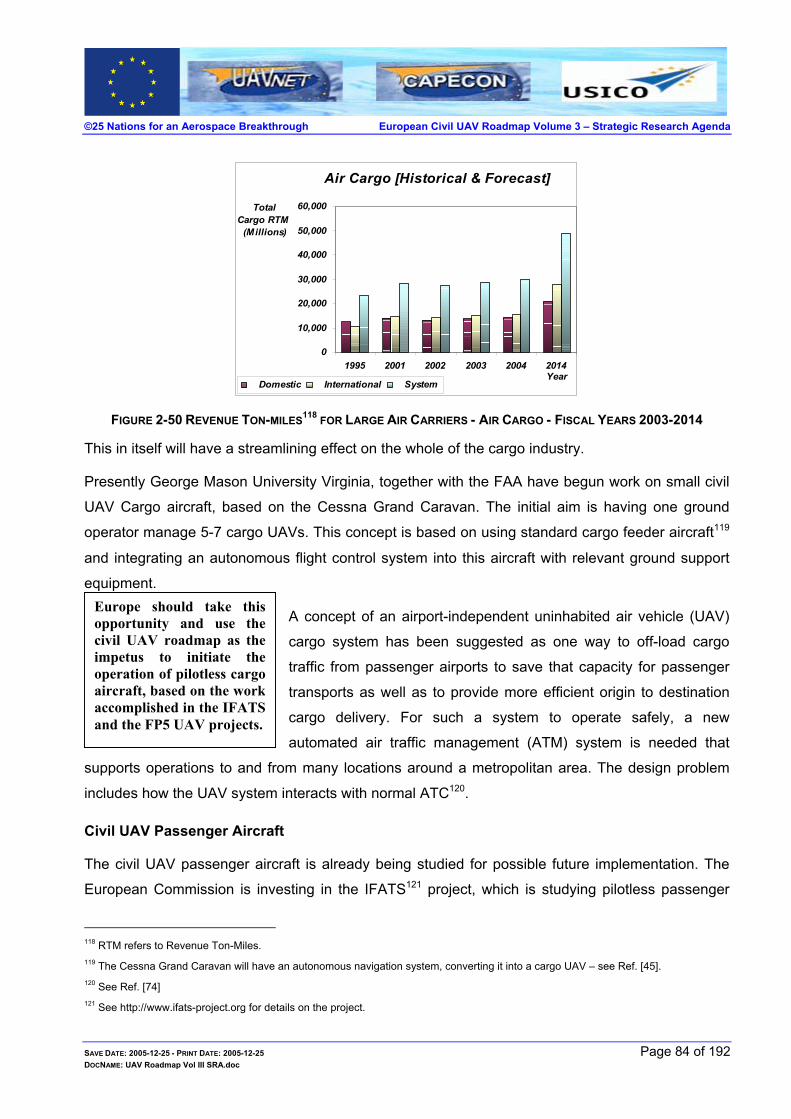
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Air Cargo [Historical & Forecast]
0
10,000
20,000
30,000
40,000
50,000
60,000
1995 2001 2002 2003 2004 2014Year
Total Cargo RTM
(Millions)
Domestic International System
FIGURE 2-50 REVENUE TON-MILES118 FOR LARGE AIR CARRIERS - AIR CARGO - FISCAL YEARS 2003-2014
This in itself will have a streamlining effect on the whole of the cargo industry.
Presently George Mason University Virginia, together with the FAA have begun work on small civil
UAV Cargo aircraft, based on the Cessna Grand Caravan. The initial aim is having one ground
operator manage 5-7 cargo UAVs. This concept is based on using standard cargo feeder aircraft119
and integrating an autonomous flight control system into this aircraft with relevant ground support
equipment. Europe should take thisopportunity and use thecivil UAV roadmap as theimpetus to initiate theoperation of pilotless cargoaircraft, based on the workaccomplished in the IFATSand the FP5 UAV projects.
A concept of an airport-independent uninhabited air vehicle (UAV)
cargo system has been suggested as one way to off-load cargo
traffic from passenger airports to save that capacity for passenger
transports as well as to provide more efficient origin to destination
cargo delivery. For such a system to operate safely, a new
automated air traffic management (ATM) system is needed that
supports operations to and from many locations around a metropolitan area. The design problem
includes how the UAV system interacts with normal ATC120.
Civil UAV Passenger Aircraft
The civil UAV passenger aircraft is already being studied for possible future implementation. The
European Commission is investing in the IFATS121 project, which is studying pilotless passenger
118 RTM refers to Revenue Ton-Miles. 119 The Cessna Grand Caravan will have an autonomous navigation system, converting it into a cargo UAV – see Ref. [ 45]. 120 See Ref. [ 74] 121 See http://www.ifats-project.org for details on the project.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 84 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
aircraft. IFATS may be viewed as another test-bed to provide
data for future trends and required technologies. The initial
stage is viewed as a conversion of a commercial aircraft into an
autonomous passenger airliner – see Figure 2-51. The IFATS
project is studying a revolutionary concept for a future air
transportation system by adding as much onboard autonomy to the aircraft as necessary to fulfil the
overall requirements of improved efficiency and safety of air transportation.
The proposed modified aircraft will fly autonomously on a pre-programmed flight route, using
sophisticated on board computing and sensor systems, with the aircraft position and tracking
carried out by a dedicated ground controller. A balance of tasks is carried via a data link between
the autonomous onboard systems and the ground controller.
FIGURE 2-51 IFATS CONCEPT FOR AUTONOMOUS AIRCRAFT
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 85 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
3 FOUNDATIONS OF EUROPEAN CIVIL UAVS Unmanned or autonomous air vehicles are increasingly being seen as the next step in aircraft
evolution with the potential to replace manned aircraft over a broad range of civil roles. At the
beginning of the year 2000, there was a clear worldwide interest by the aeronautical community to
analyse how UAVs could be introduced and operated safely for civil applications in the controlled
airspace.
Europe responded by supporting four civil UAV projects within the fifth European Commission
Funded Framework Programme (FP5). These projects were: CAPECON, USICO, UAVNET and HELIPLAT.
For the past 3 years, a consortium of leading European organizations, among them industries such
as EADS, Thales, BAE Systems, Alenia, Sonaca, Israel Aircraft Industries, and research institutes
such as DLR, Onera, NLR, CIRA have recognized the potential benefits and have established a
number of European projects to advance the utilisation of UAVs for civilian applications. USICO
dealt with the issues of system airworthiness and ATC integration, CAPECON evaluated the
various missions and proposed suitable cost-effective and reliable configurations as responses to
their requirements while UAVNET provided the forum for the exchange of information on all the
relevant issues.
To date approximately 90% of all UAV systems funding are a direct result of government
requirements channelled through military and defence programs, with relatively few exceptions.
This trend is likely to continue until the issues faced in introducing civil UAVs into the controlled
airspace are resolved.
There are two main issues to be addressed prior to the introduction of civil UAV into controlled
airspace:
Civil UAV airworthiness
Civil UAV regulations – approved operational rules should be available to allow safe operation of such airworthy UAVs.
Presently, there is a stalemate or circle of inactivity between the three principle stakeholders in the
market for civil UAVs:
Civil UAV users who are hesitant to pursue commercial applications because the industry cannot provide UAVs that have an approved certificate of airworthiness and because civil authorities do not permit them to operate outside restricted airspace.
Civil regulators who are hesitant to pursue the development of the necessary airworthiness
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 86 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
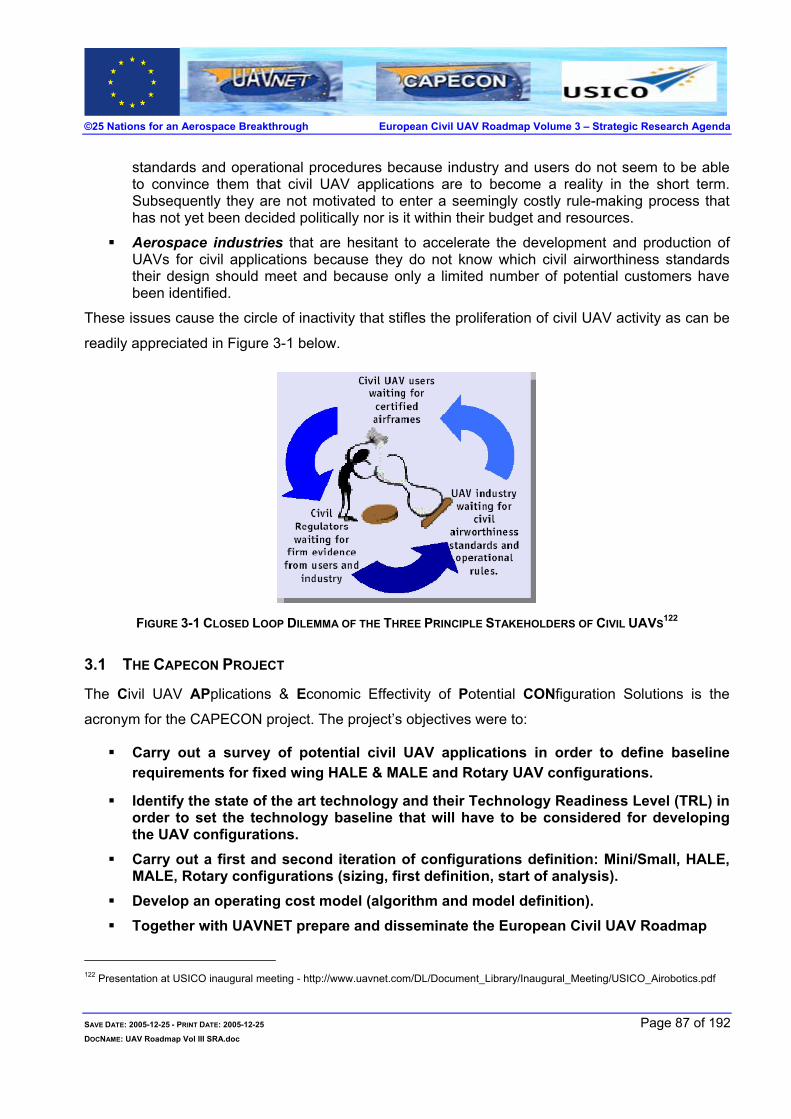
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
standards and operational procedures because industry and users do not seem to be able to convince them that civil UAV applications are to become a reality in the short term. Subsequently they are not motivated to enter a seemingly costly rule-making process that has not yet been decided politically nor is it within their budget and resources.
Aerospace industries that are hesitant to accelerate the development and production of UAVs for civil applications because they do not know which civil airworthiness standards their design should meet and because only a limited number of potential customers have been identified.
These issues cause the circle of inactivity that stifles the proliferation of civil UAV activity as can be
readily appreciated in Figure 3-1 below.
FIGURE 3-1 CLOSED LOOP DILEMMA OF THE THREE PRINCIPLE STAKEHOLDERS OF CIVIL UAVS122
3.1 THE CAPECON PROJECT
The Civil UAV APplications & Economic Effectivity of Potential CONfiguration Solutions is the
acronym for the CAPECON project. The project’s objectives were to:
Carry out a survey of potential civil UAV applications in order to define baseline requirements for fixed wing HALE & MALE and Rotary UAV configurations.
Identify the state of the art technology and their Technology Readiness Level (TRL) in order to set the technology baseline that will have to be considered for developing the UAV configurations.
Carry out a first and second iteration of configurations definition: Mini/Small, HALE, MALE, Rotary configurations (sizing, first definition, start of analysis).
Develop an operating cost model (algorithm and model definition). Together with UAVNET prepare and disseminate the European Civil UAV Roadmap
122 Presentation at USICO inaugural meeting - http://www.uavnet.com/DL/Document_Library/Inaugural_Meeting/USICO_Airobotics.pdf
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 87 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Initially the feasibility ground rules were laid out as shown in Figure 3-2.
Since the two most important challenges facing civil operation of UAVs are safety and cost,
CAPECON addressed both these issues. CAPECON123 was set up to advance the utilisation of
safe and economically viable Unmanned Air Vehicles (UAVs) in the civilian commercial sphere. The
project carried out the technological and economic feasibility of different civil UAV configurations for
various applications – see Figure 3-3.
FIGURE 3-2 CAPECON FEASIBILITY GROUND RULES
CAPECON analysed civil UAVs: four HALE civil UAV configurations, two MALE civil UAV
configurations, two rotary civil UAV configurations and two small civil UAV configurations. The
CAPECON project initially defined configurations in a multitask activity that was carried out in two
iterations by separate teams for each configuration. Four different High Altitude Long Endurance
(HALE) configurations were studied in depth, with different technological approaches. All
configurations took into account the necessary safety and cost effectiveness goals.
123 CAPECON is in the final stages before project termination.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 88 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
The different HALE UAV configurations were to cruise at altitudes above 55000 feet, and weigh
above 3 tons:
Modular HALE UAV (workpackage led by Israel Aircraft Industries)
Solar HALE UAV (workpackage led by Politecnico di Torino)
Blended wing HALE UAV (workpackage led by Onera)
Blended wing HALE UAV (workpackage led by Warsaw University of Technology)
FIGURE 3-3 CAPECON UAV RESEARCH DOMAINS
The modular configuration was designed to optimise cost by allowing different payloads to use the
same platform. This was to eliminate the inevitably different platforms for various payloads, without
compromising maximal requirements for altitude and long endurance applications. This
configuration will have to climb and descend at a greater frequency than that of the solar
configuration and, therefore, will need to incorporate multiple multidirectional sensors – see Figure
3-4.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 89 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
FIGURE 3-4 CAPECON - MODULAR HALE CIVIL UAV DESIGN
The solar configuration was designed for very long endurance flight. It took into consideration
aeroelasticity, sensor types and energy requirements, albeit with limited payloads – see Figure 3-5.
FIGURE 3-5 CAPECON - SOLAR HALE CIVIL UAV DESIGN
The third and fourth configurations were based on a blended wing body, which had aerodynamic
and structural optimisation designed in a cost effective way.
The first design was based on aeronautical technologies using laminar flow across the outer and
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 90 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
inner wing. In addition, it was to be aerodynamically efficient with an efficient structural layout such
as to reduce structure weight and use the aeroelasticity efficiently – see Figure 3-6.
FIGURE 3-6 CAPECON – BLENDED WING-BODY HALE CIVIL UAV DESIGN 1
The second HALE blended wing body design, has a blended wing configuration constructed from
metal and composite materials. The wing control surfaces provide for longitudinal axis stability, with
a central fin together with wingtips that provide directional stability – see Figure 3-7.
FIGURE 3-7 CAPECON – BLENDED WING-BODY HALE CIVIL UAV DESIGN 2
There were two MALE civil UAV configurations studied in the CAPECON project.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 91 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
The different MALE UAV configurations were for altitudes below 45000 feet, and weights below 3
tons:
Piston MALE UAV (workpackage led by Warsaw University of Technology)
Turbo Prop MALE UAV (workpackage led by the University of Naples)
The first MALE civil UAV configuration was based on a diesel supercharged engine configuration –
see Figure 3-8.
FIGURE 3-8 CAPECON – MALE CIVIL UAV DIESEL SUPERCHARGED ENGINE CONFIGURATION DESIGN 1
The second design was based on a turbo-engine configuration.
FIGURE 3-9 CAPECON – MALE CIVIL UAV TURBO-ENGINE CONFIGURATION DESIGN 2
Two Rotary UAVs were studied for altitudes below 25000 feet, and weights below 0.5 ton, offering a
classic single rotor design and the coaxial rotor design:
Conventional rotor UAV (workpackage led by Agusta) – see Figure 3-10
Coaxial rotor UAV (workpackage led by Eurocopter)– see Figure 3-11
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 92 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
FIGURE 3-10 CAPECON – PINGLE ROTOR CIVIL UAV
FIGURE 3-11 CAPECON – POAXIAL ROTARY CIVIL UAV
The different civil UAV designs demonstrate the different approaches taken by the individual design
teams, indicating the influence of their own experience.
CAPECON initially set ground rules and assumptions. The project partners studied the
requirements, defined the applications’ payloads and the essential technologies to meet the
application requirements including the propulsion system definition.
A preliminary design was initiated, which included: sizing - geometrical definition (3 views and 3D),
external layout, aerodynamic definition, structure concept, systems definition, payload integration,
internal layout and weight and balance computation..
In addition, the flight performance analysis was undertaken and that included the establishment of
databases (aerodynamic, weights and propulsion databases) and performance computations
(integral performance, point performance - flight envelopes, and ground performance).
Aerodynamic analysis was carried out through CFD modelling and control and stability was
addressed in the design analyses.
The structural analyses (FEM) for the different configurations were carried out taking into account
different parameters such as aeroelasticity due to high aspect ratio/low mass wing in the fixed wing
HALE civil UAVs.
The reliability and safety requirement characteristics were addressed as well as maintainability
aspects and recommendations were prepared for the different civil UAV configurations.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 93 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
3.2 USICO
USICO is the acronym that stands for Unmanned aerial vehicle Safety Issues for Civil Operations.
The USICO project was conceived in order to develop procedures for the certification of civil UAVs
for civilian applications and for the integration of UAVs within controlled airspace. USICO was
funded in the 5th European Commission framework programme and participated in the JAA/Eurocontrol Task Force. The USICO project focused on the following key issues:
Airworthiness Certification - ensure that the design of the civil UAV is safe and reliable.
Operational Certification - ensure that the civil UAV can be operated in airspace that is
simultaneously used by other aircraft or other UAVs.
The USICO project ran between May 2002 and April 2004. In total, an effort of 28 man-years was
spent by: five industry organisations, three research institutes, and two universities from a total of
five countries within the European Union and one associated state.
In order to reach its objective USICO set out to:
Compile essential operational/functional requirements for civil UAV missions
Define a practicable set of standards for certification of civil UAV
Develop and pre-validate concepts for safe operation of UAV in civil airspace
Disseminate the findings to regulation organisations and the user community
The project commenced with a market analysis for civil applications, which included various UAV
platforms (HALE, MALE, rotorcraft). A set of representative UAV platforms were selected, based on
a survey of existing and future UAVs, where six configurations were considered as representatives
of a wide range of platforms:
2 Rotorcrafts – Rotary platforms, characterized by low weight, low altitude and low endurance.
2 MALE – Fixed wing platforms, having almost the same geometry and aerodynamic characteristics but propelled by either a single or twin turboprop engines. They are characterized by medium weight, medium altitude and medium to long endurance.
1 HALE – Fixed wing platform, propelled by twin turbofan engines, characterized by high weight, high altitude and long endurance.
1 HALE – Aerostatic platform propelled by an electric engine and characterized by very high weight, high altitude and very long endurance.
This was followed by surveying existing recommendations and regulations for airworthiness
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 94 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
certification and rules for safe operations of UAVs. Civil UAV safety issues were found to
correspond to two types of risks and two interrelated processes that may be summarized as
follows:
The risk in flying over populated areas should not be higher than for manned aircraft equivalent category. UAV system design must be subsequently shown to be safe and reliable in order to receive authorization to fly above densely populated areas. This is usually the main purpose of the airworthiness certification process and is mostly related to safety design criteria.
The risk of air collision should also not be higher than for manned aircraft of an equivalent category. In addition, UAVs should be safely operated. This is usually dealt with during the operational certification process, relating to airspace management issues, operator qualification, maintenance and continued airworthiness.
Typical mission scenarios for these UAV categories were outlined. A typical HALE operational flight
is described in Figure 3-12, below.
FIGURE 3-12 USICO TYPICAL HALE CIVIL UAV OPERATIONAL FLIGHT124
Relevant technologies for ATC/ATM integration and collision avoidance were studied with relevant
concepts proposed for safe operation. These concepts for safe UAV operations were evaluated
using ATC/ATM and collision avoidance simulations – see figures: Figure 3-13 to Figure 3-16.
The results obtained in the USICO project were disseminated by means of periodic presentations to
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 95 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
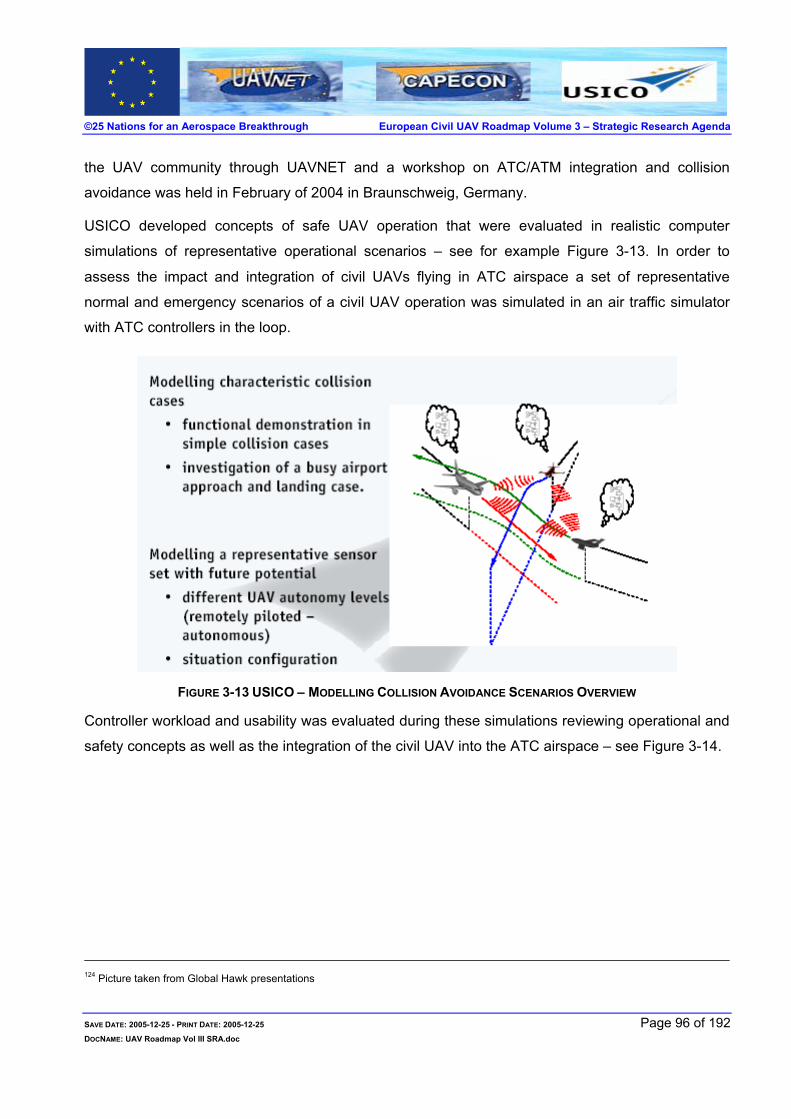
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
the UAV community through UAVNET and a workshop on ATC/ATM integration and collision
avoidance was held in February of 2004 in Braunschweig, Germany.
USICO developed concepts of safe UAV operation that were evaluated in realistic computer
simulations of representative operational scenarios – see for example Figure 3-13. In order to
assess the impact and integration of civil UAVs flying in ATC airspace a set of representative
normal and emergency scenarios of a civil UAV operation was simulated in an air traffic simulator
with ATC controllers in the loop.
FIGURE 3-13 USICO – MODELLING COLLISION AVOIDANCE SCENARIOS OVERVIEW
Controller workload and usability was evaluated during these simulations reviewing operational and
safety concepts as well as the integration of the civil UAV into the ATC airspace – see Figure 3-14.
124 Picture taken from Global Hawk presentations
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 96 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
FIGURE 3-14 USICO – ATM AND OPERATIONS SIMULATOR CONFIGURED FOR UAV TRIALS
Simulated traffic in two sectors was piloted by pseudo-pilots navigating aircraft according to
predefined individual flight paths as well as advisories and clearances given by ATC controllers in
the respective sectors. Air traffic to the North and South is designated as dummy traffic, since it is
navigating fully autonomously. The simulations included a typical mix of arrival and departure of
aircraft traffic at Frankfurt airport, as well as some over-flights and two MALE civil UAVs.
In addition, several Sense and Avoid concepts were investigated by simulation of potential flight
collision scenarios and the respective risk levels were evaluated – see Figure 3-16.
FIGURE 3-15 USICO – COLLISION AVOIDANCE SCENARIOS EXAMPLE
These simulations clearly showed that with minor adaptation to ATC procedures, UAV operations
under IFR conditions could be realised with the same level of safety as that for manned aircraft.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 97 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
FIGURE 3-16 USICO – ATC DISPLAY SCENARIOS OF SIMULATED AIR TRAFFIC WITH CIVIL UAV
Further simulations with UAV flights under VFR conditions, indicated a requirement for a reliable
sense and avoid capability, to assure a successful collision avoidance manoeuvre. The simulations
showed the first successful automatically executed collision avoidance manoeuvres following ICAO
flight rules and verified that communication based collision avoidance systems based on ADS-B
technology is a promising candidate for the near future. Nevertheless, sensors based calibrated
airspeed (CAS) should be made mandatory for non-cooperative obstacles or traffic.
3.3 UAVNET
UAVNET is a Thematic Network, funded by the European Community to advance the development
of civil UAVs (Unmanned Air Vehicles) for civilian purposes. The thematic network has been
serving as a forum for information exchange, for suggesting new policies and for launching
activities in critical technology research. UAVNET has the mission of disseminating information
among industry, academia and research institutes. This is accomplished through Workshops
convened several times a year and the UAVNET website.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 98 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
UAVNET’s scope of work was defined as:
Bringing together industry, universities, research centres and potential users
Coordinating a "cluster" of projects funded at a community level
Exchange and dissemination of knowledge
Coordination of activities
Networking of organisations
Partners in UAVNET were:
Airobotics (Germany) Alenia (Italy) BAe Systems (England) Brno University (Czech Republic) CIRA (Italy) DLR (Germany) EADS (France) Gedminas Institute (Lithuania) IAI (Israel) Institute of Aviation (Poland) National Defence Univ. (Hungary) NLR (Netherlands) ONERA (France) Politechnika Warsaw (Poland) Politecnico Torino (Italy) Snecma (France) Swedish Space Corp. (Sweden) Sonaca (Belgium) Thales Communications(France)
The UAVNET workshops were held in a wide variety of locations throughout Europe and Israel in
order to bring the message of civil commercial UAVs to all interested parties. A map showing
locales of the workshops and their respective dates is described in Figure 3-17.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 99 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
FIGURE 3-17 UAVNET WORKSHOPS
During these workshops, numerous subjects concerning the introduction of civil UAVs into daily use
were discussed. These subjects included the following main issues:
Political Social Economical Technological
Psychological Required infrastructure The requirements for civil UAVs and how to introduce them
into the controlled airspace
3.4 HELIPLAT
The objective of the Heliplat project was to design an autonomous/automatic High Altitude Long
Endurance flying platform, capable of remaining aloft for very long periods. The civil HALE was
designed using sophisticated computer software, which performed sensitivity calculations based on
a parametric platform model. The design parameters considered parameters such as: solar
radiation, latitude and altitude, mass and efficiency of solar cells and fuel cells, aerodynamics
aspects, etc.
Three latitudes were considered in the analysis: 36°, 40° and 45°, with the latitudes, corresponding
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 100 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
to Malta, Naples and Turin, respectively.
FIGURE 3-18 HELIPLAT CONFIGURATION
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 101 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
3.5 FP5 FUNDED CIVIL UAV PROJECTS KEY FINDINGS
3.5.1 USICO’s key findings USICO’s main recommendations were that:
1. The authority of the UAV Task Force initiated by JAA and EUROCONTROL shall be recognised and that its recommendations be implemented by EASA without undo interference or further endless iterations.
2. European aeronautical research shall consider UAVs as a high priority item, which can be treated in parts as the avant-garde of new innovative aerial vehicles influencing manned aircraft and their operation as well.
3. European UAV interests shall be represented as an integral part of the European aerospace and defence industries. No other organisation than the European “Aerospace and Defence Industries Association (ASD)” is better suited to play this role.
3.5.2 CAPECON’s Key Findings There is a need to research and develop methods:
1. To reduce the costs associated with present UAV technologies, in order to ensure that they are competitive within the commercial and civil UAV sphere.
2. To increase present safety and reliability through technological research and development, into structures that are more efficient, enhanced fail-safe systems, improved collision avoidance systems tailored to civil UAVs with system autonomous recovery.
3. To formulate the final civil UAV configurations that will provide the highest affordability rating and thus be the first in the commercial market.
3.5.3 UAVNET’s Key Findings UAVNET provided an organised forum for discussions in the civil UAV field, which showed that
there is immense interest in this field.
The UAVNET key finding is that there is a need to have an international forum for civil UAV
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 102 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
technologies where industry meets academia and potential customers forming a highly successful symbiotic relationship.
The UAVNET forum should be transformed into a Technological Platform, which will coordinate further research into essential technologies (e.g. Sense and Avoid), Validation of UAV utilisations for the various proposed applications and development, production and operation of UAVs on behalf of civilian modes. This Technological Platform should promote research institutes, universities, SMEs and other industries from all 25 European nations and in particular those nations, which do not have strong aeronautical industries.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 103 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
4 MARKET SURVEY - ACHIEVING OPERATIONAL CIVIL UAV SYSTEMS Frost & Sullivan, although not a partner in the UAVNET project, actively participated in the
Workshops and was contracted, considering their expertise in this field, to perform this Market
Research Study of the European Market exclusively for the Roadmap.
This section in its entirety was prepared by Frost & Sullivan.
4.1 TOTAL MARKET DEMAND ANALYSIS
4.1.1 Introduction The market for UAV systems for civil and commercial applications in Europe is on the brink of being
realised. Exciting opportunities are emerging which are an excellent fit with UAV capabilities. In
the long-term, UAVs are likely to become a true ‘disruptive technology’, eventually taking on many
of the roles currently performed by manned aircraft and also opening up some new markets.
The purpose of this study is to give shape to these hopes and ambitions. It will address eight key
markets, assess the drivers and restraints of these markets and quantify each market. These will
be combined to form a top-level assessment, analysis and forecast of the future civil and
commercial UAV systems market in Europe.
4.1.2 Methodology This market assessment is based on three complimentary methodological strands. Firstly, an
exhaustive search of secondary resources covering both the UAV market and potential end-user
market dynamics. Secondly, a revenue forecast model was built, appropriate to the specific
market, and relevant inputs, such as current inventories, current mission costs, market demand and
growth within markets and UAV model cost assumptions, used to reach a projected market
potential. To refine the assessment, primary research was undertaken. This consisted of a large
number of interviews with UAV manufacturers and potential customers of UAV manufacturers or
services. This enables a projected market forecast that is based, as much as possible at this stage
of the market’s development, on realistic assessments of end-user demand and the impact of future
end-market dynamics. This process was instrumental to the study’s results.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 104 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
4.1.3 Market Drivers
4.1.3.1 Introduction TABLE 4-1 CIVIL AND COMMERCIAL UAV MARKETS: MARKET DRIVERS (EUROPE), 2006 - 2015
Rank Driver 1 Cost Advantages
2 Capability Advantages
3 New Applications
4 Technology Maturation
Source: Frost & Sullivan
4.1.3.2 Cost Advantages The pressure to constantly reassess and reduce costs is an ever-present factor in business today,
and one that has a bearing on almost every business decision. UAV systems potentially have
several cost benefits to offer a number of industries. As such, the extent to which UAV systems
impact business margins will determine to a large degree how widely UAV technology pervades
European society in the coming decades.
The main cost advantages for UAVs are not to be found in the initial purchase price. UAV systems
currently can, at best, only match the cost of procuring a manned aircraft. The cost advantages of
UAV systems are best demonstrated over the in-service life of a system. Firstly and most
importantly, the reduction in personnel costs is significant, with the removal of the pilot and the
engineering expertise required to maintain and repair the cockpit systems of a manned aircraft.
Secondly, fuel costs will be reduced given the reduced weight of UAV systems compared with
manned aircraft, largely to do with the removal of the controls and systems that support pilot
operation of the aircraft. Inventory costs are also likely to be lower given the lower size and weight
of UAVs.
In the military market, initial procurement cost generally weighs more relative to in-service costs
when equipment acquisitions are made. This is a function of the annual budgetary process that
most western militaries are subject to. This is unlikely to be the case in the commercial world,
although it will hold true to a lesser degree for some civil bodies. Generally, commercial
organizations are much better at appreciating the impact on costs in the future and long term
investment, based on RoIC (Return on Invested Capital) assessments.
Ultimately, in seeking to attract civil and commercial customers, UAV manufacturers will need to
adequately demonstrate clear in-service cost benefits as well as offer UAV systems at an initial
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 105 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
procurement cost that is attractive to end-users. This will also be necessary for UAV service
providers in order to be more cost-effective than competitors who utilise manned systems.
4.1.3.3 Capability Advantages The development of a civil and commercial UAV market will develop as a result of UAV systems
supplanting manned aircraft as a consequence of being able to do the same mission at lower
overall cost. In many cases, UAV systems will not have any inherent technological advantage over
manned aircraft with both aircraft being able to do the mission equally well.
However, in other cases UAV systems will be able to provide additional and extended capabilities
over and above current or even future manned systems. The use of the designation ‘DDD’ (Dull,
Dark and Dangerous) to describe the use of UAV systems is somewhat overused in the UAV
community at this point in time, but it adequately conveys the areas in which UAVs will excel in the
marketplace.
Long endurance (‘Dull’) gives UAVs a clear advantage over manned aircraft and is particularly
relevant to border patrol, maritime surveillance and potential communications applications. The
ability of UAV mounted sensors to see through smoke and at night give them a clear advantage in
observing forest fires while keeping personnel out of harms way. Lastly, the idea of ‘swarming’
UAVs, for example, several small UAVs operating in concert with a larger UAV, again provides
possibilities that manned aircraft find hard to replicate. The possibilities of mini UAVs in terms of
ease of launch and flexible deployment are also another example of UAV systems’ technological
superiority in some areas over manned systems.
4.1.3.4 New Applications As previously indicated, much of the future UAV systems market in the civil and commercial sphere
will come from displacing manned aircraft that currently perform the missions in the respective
fields. Nevertheless, there are other areas where potentially UAVs will not merely replace manned
aircraft but be able to provide a capability where one did not exist previously.
Potentially the largest such application is for telecommunications, but in this area UAV technology
has some substantial obstacles to overcome, particularly in the European market. Other
applications in this category would include, for example, close surveillance for law enforcement.
Given UAV technology’s emergence as a ‘disruptive technology’ the possibility of other areas, as
yet unidentified, emerging as markets for UAVs where currently there is no market for either
manned or unmanned aircraft, must be considered highly likely.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 106 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
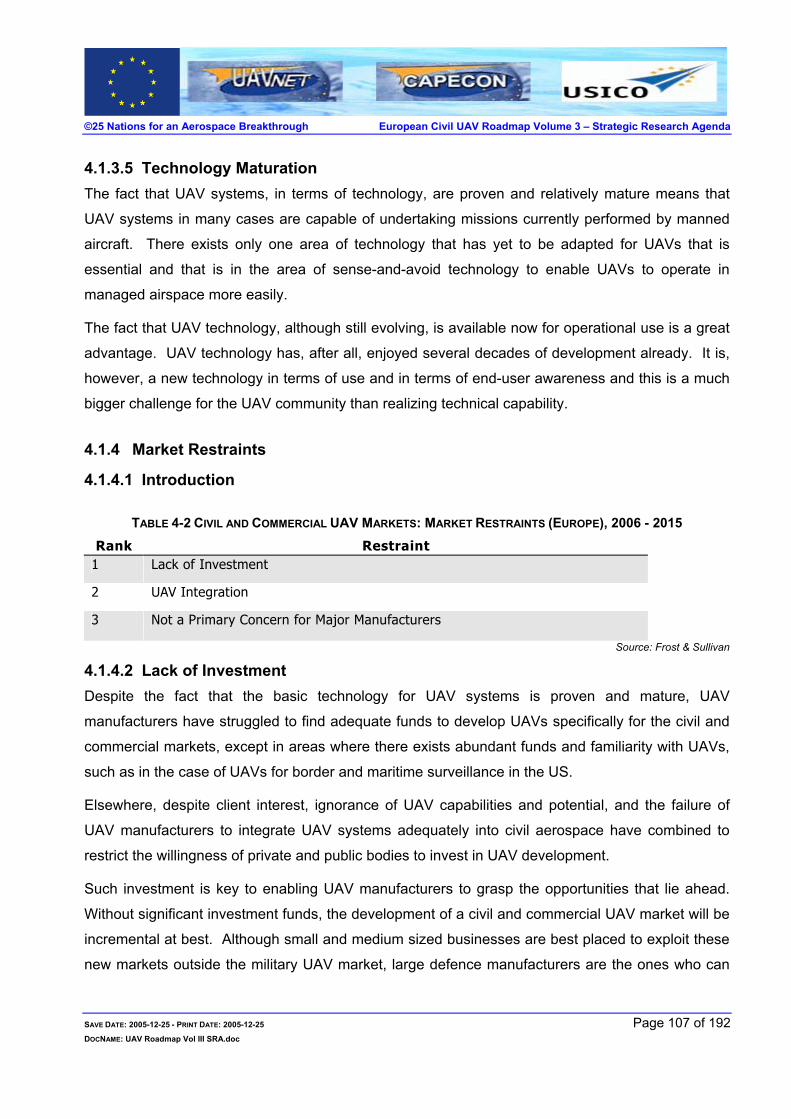
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
4.1.3.5 Technology Maturation The fact that UAV systems, in terms of technology, are proven and relatively mature means that
UAV systems in many cases are capable of undertaking missions currently performed by manned
aircraft. There exists only one area of technology that has yet to be adapted for UAVs that is
essential and that is in the area of sense-and-avoid technology to enable UAVs to operate in
managed airspace more easily.
The fact that UAV technology, although still evolving, is available now for operational use is a great
advantage. UAV technology has, after all, enjoyed several decades of development already. It is,
however, a new technology in terms of use and in terms of end-user awareness and this is a much
bigger challenge for the UAV community than realizing technical capability.
4.1.4 Market Restraints
4.1.4.1 Introduction
TABLE 4-2 CIVIL AND COMMERCIAL UAV MARKETS: MARKET RESTRAINTS (EUROPE), 2006 - 2015
Rank Restraint 1 Lack of Investment
2 UAV Integration
3 Not a Primary Concern for Major Manufacturers
Source: Frost & Sullivan
4.1.4.2 Lack of Investment Despite the fact that the basic technology for UAV systems is proven and mature, UAV
manufacturers have struggled to find adequate funds to develop UAVs specifically for the civil and
commercial markets, except in areas where there exists abundant funds and familiarity with UAVs,
such as in the case of UAVs for border and maritime surveillance in the US.
Elsewhere, despite client interest, ignorance of UAV capabilities and potential, and the failure of
UAV manufacturers to integrate UAV systems adequately into civil aerospace have combined to
restrict the willingness of private and public bodies to invest in UAV development.
Such investment is key to enabling UAV manufacturers to grasp the opportunities that lie ahead.
Without significant investment funds, the development of a civil and commercial UAV market will be
incremental at best. Although small and medium sized businesses are best placed to exploit these
new markets outside the military UAV market, large defence manufacturers are the ones who can
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 107 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
invest large amounts of capital required to develop UAV systems specific to the civil and
commercial market. However, their motivation to do so is reduced due to the fact that military
UAVs can be sold for a higher price and much of the defense industry is accustomed to a
relationship with its governmental customers that is very different from that which is common in the
commercial sphere.
It is therefore doubtful that investment will come from this area and this leaves SMEs still well
placed to exploit the opportunity of a market in civil and commercial UAVs. This leaves two further
sources of investment: potential end-users and governmental or similar investment. The future
end-users of UAV systems are also reluctant or are unable to put up sufficient development funds
for UAVs. While they are clearly willing to participate in trials, investing small amounts of capital,
private end-user entities, for example electricity or gas companies, are still yet to be convinced that
UAVs will be able to fly on the scale needed and without restrictions. This attitude is as much a
psychological one as one based on the state of UAV technology. Potential public end-users simply
are unlikely to be able to call on the kind of funds that the US Coast Guard could, to finance
development of a custom designed UAV system.
This leaves government and EU funding as the best source of development resource for SME UAV
manufacturers. Such funding has been available and more may be extracted over time, but once
again it will require a strong effort to educate decision makers and a willingness to tailor the
development phase to the requirements of civil, rather than commercial entities. Nevertheless, this
will aid the demonstration of effective UAV systems, helping to overcome the inherent uncertainty
and caution that many potential end-users currently display.
4.1.4.3 UAV Integration One of the key barriers to the cultural acceptance of UAVs by end-users remains the difficulties
involved in integrating UAV systems into civil airspace.
The question of certification is the initial hurdle to be overcome. UAV systems to perform anything
other than niche tasks in remote areas will have to comply with a rigorous certification procedure
and obtain a full certificate of airworthiness. This is also highly likely to extend to include the
communications, flight controls and ground stations of UAV systems which will have to demonstrate
safety in relation to the loss of communication with the air vehicle, resistance to jamming (either
deliberate or inadvertent) and standards in correct failure-mode recovery which will be vital if UAVs
are to fly over populated areas. Sense-and-avoid technology also needs to be incorporated into
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 108 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
UAV systems, which presents its own problems.
These obstacles currently severely restrict the market in two ways. Firstly, this obviously severely
restricts the markets UAVs can be offered in now. Secondly, it severely slows the demonstration of
technology and is a significant dampener on potential end-users and their willingness to engage in
the development process.
4.1.4.4 Civil and Commercial Markets a Secondary Concern for Major Manufacturers This factor currently restricts the market in some ways but also represents a significant long-term
opportunity for SME UAV manufacturers and for manufacturers who see civil and commercial as
strategic markets. The current major UAV manufacturers are essentially defence-orientated
manufacturers and are geared to relationships and procurement processes focussed on stable,
long-term defence customers. Defence market dynamics are characterised by long-development
lead-times, high technological sophistication, expensive bulk purchases and an ongoing
relationship that involves MRO, training and sporadic upgrades. The likely civil and commercial
markets for UAVs are likely, in contrast, to be characterised by off-the-shelf purchases, short
investment cycles, small contract sizes, low technological sophistication and a less involved
relationship with the end-user after the initial purchase and introduction of a UAV system.
This means smaller manufacturers may be able to be more flexible and dynamic in this market.
However, in the short-term the only UAV systems that demonstrably can do civil and commercial
tasks are based on military models. Very often, these remain too expensive for the emerging UAV
markets, even when stripped of the most expensive payloads and data links military customers
demand. Furthermore, these manufacturers continue to concentrate on military markets. Although
there is some interest in these new markets from established UAV manufacturers, in terms of
resources and real engagement there is little to suggest that they are willing or able to orientate
themselves to take advantage. This is a restriction on the market because currently these are the
players who are best placed to demonstrate the utility of UAV technology and allocate resources to
develop UAV systems specifically for the civil and commercial UAV market.
Simply put, this market is not foreseen to be attractive at this stage to a number of large defense
manufacturers. In particular, the more diffuse nature of the market and the small contracts that will
result may well not be attractive to large defence contractors who enjoy contracts that are very
often over US$100m. While there is undoubtedly interest and awareness of many aspects of the
civil and commercial market in these organisations, resources and investments are skewed towards
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 109 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
defence customers given the greater visibility in the military market and the larger contracts that are
currently available. Current UAV manufacturers may struggle to orientate their UAV businesses to
dominate the civil and commercial market, particularly in its early stages, if they remain unaware of,
or unable to fully appreciate the large long term potential of the civil and commercial market over
the next 30 years.
4.1.5 Market Challenges
4.1.5.1 Introduction TABLE 4-3 CIVIL AND COMMERCIAL UAV MARKETS: MARKET CHALLENGES (EUROPE), 2006 - 2015
Rank Challenge 1 Building UAV Awareness
2 Creative Marketing
3 Customisation
4 Development of Viable Business Models
Source: Frost & Sullivan
4.1.5.2 Building Awareness As the drivers and restraints outlined above make clear, building awareness and also confidence
among potential end-users will be crucial in determining the speed with which the civil and
commercial market in Europe develops.
The key to this process will be a creative approach and one that includes potential end-users at
every possible stage of system development. Building confidence in the capabilities and reliability
of UAV systems is also essential. Coordinated efforts will be a very effective way for the UAV
community to build awareness among potential end-users and also in attracting government, EU
and venture capital investment funds.
4.1.5.3 Creative Marketing Creative marketing involves raising awareness and confidence as outlined above. However, it also
involves actively seeking out customers and aggressively promoting UAV capabilities and potential
cost savings. Once again this is much harder for SMEs in terms of resources and expertise.
However, in a market that will be characterised by low customer awareness for some time to come,
the marketing aspects associated with the civil and commercial UAV markets cannot be neglected
for too long if the market is to reach its potential over the next decade.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 110 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
4.1.5.4 Customisation The list of potential civil and commercial markets is a long one with relatively little commonality
between each market’s requirements beyond the obvious UAV capabilities and advantages. This
suggests that the optimum design for a UAV system to be successful in these markets is a generic
vehicle incorporating sufficient flexibility and redundancy so as to be able to be customized to
perform a variety of different missions in different markets. This also applies within markets as well.
For example, the requirements for forest fire detection, forest fire management and general forestry
management have different operation ‘envelopes’ and different requirement in terms of sensors and
flight patterns.
If UAV systems are only developed for very specific civil and commercial tasks, models that cannot
easily be transferred across markets, the market as whole will advance only fitfully. Conversely, the
experience of established UAV manufacturers in tentatively looking to enter the civil and
commercial market suggests that a level of flexibility to enable customization and sensitivity to
customers’ specific needs will be required.
4.1.5.5 Development of Viable Business Models Perhaps the biggest area of uncertainty in forecasting the future civil and commercial UAV market
regards what will be the predominant, and therefore most optimal business model to exploit the
opportunities that lie ahead. More thinking needs to be done to assess whether the SMEs that
have the ability to benefit from a disruptive innovation such as UAV systems will be best advised to
be merely manufacturers, providers of a wide range of UAV services or to concentrate on
innovative and extensive after-sales support.
PPU (Pay Per Usage) is one particular business model that has been suggested and indeed has
been adopted by at least one UAV firm active in commercial markets. It’s obvious value at this
stage of the market’s development is that it removes the operational uncertainty and financial risk
from the client, making it that much more attractive. In any case, many of the roles that manned
aircraft currently perform are outsourced in any case, which suggests that current providers of
aerial services should be viewed as potential customers as well as the actual purchaser of the
service.
Another similar option is one that is being pursued by the Australian authorities. In encouraging
bids utilizing UAVs for a coastal surveillance contract, the Australian government is looking to
outsource the bulk of its off shore patrol duties to a service provider. By encouraging bids involving
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 111 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
UAVs, to which two companies have responded, it is clear that over the life of the 15-year contract,
UAV systems offer cost savings over and above manned aircraft.
4.1.6 Quantifying the Market The future European civil and commercial UAV market presents certain difficulties in terms of
forecasting, aside from the fact that the UAV systems market in these areas does not even exist in
any shape as yet.
The main difficulty is assessing such disparate markets which all have very different dynamics and
within which, the UAV market will function in different ways. Essentially, there will be a difference
between procurement markets and service markets. In this study we have therefore assessed
different markets according to these characteristics but will aggregate them all to make up ‘The
European Civil and Commercial UAV Market’, as service revenues and UAV systems revenues are
essentially the same market. Certainly, it is likely that those wishing to enter this market should be
prepared to be able to offer UAV services as well as off-the-shelf sales of systems, which will be
operated by the customer. In this study, earth observation and pipeline monitoring have been
regarded as service markets and the rest as being largely procurement markets.
-
50.0
100.0
150.0
200.0
250.0
300.0
2006 2007 2008 2009 2010 2011 2012 2013 2014 2015
Euro
mill
ions
FIGURE 4-1 THE TOTAL MARKET FOR CIVIL AND COMMERCIAL UAV MARKETS IN EUROPE, 2006-2015
As such, Frost and Sullivan estimates the civil and commercial market in Europe (compromising all
eight of the markets discussed in this report) to be worth €1.2bn between 2006 and 2015.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 112 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
The market will grow particularly fast once certification and ATM regulations are established which
is likely to be around 2009 - 2010. The reason for the ‘dip’ in 2014 is largely due to the
methodology of this study and does not represent an overall market decline. The total market is a
summary of the eight markets in this study, which are derived from identifying distinct market
opportunities rather than from assumed growth rates. Furthermore, the wide differences in price
between, for example, 100Kg UAV systems and HALE systems explain some of the uneven
growth. Finally, it should be kept in mind that the next ten years represents only the initial stage of
what will be a much larger market that is unlikely to reach maturity in terms of growth rates before
2030.
TABLE 4-4 THE TOTAL MARKET FOR CIVIL AND COMMERCIAL UAV MARKETS IN EUROPE, 2006-2015
Revenues Year (€ Million)
2006 8.4 2007 15.5 2008 30.7 2009 51.3 2010 87.8 2011 137.2 2012 168.8 2013 205.8 2014 203.1 2015 270.4
Source: Frost & Sullivan
The market for earth observation is likely to be the largest market (37%) largely because it is in fact
several markets in one. Telecommunications (13%), border patrol (11%), coastal patrol (13%) and
forest fire management (12%) will comprise between 11% and 14% each, with powerline (5%),
pipeline monitoring (6%) and law enforcement (3%) taking a smaller share.
TABLE 4-5 CIVIL AND COMMERCIAL UAV MARKETS IN EUROPE, 2006-2015
Revenues Year (€ Million)
Earth Observation 442.6 Maritime Surveillance 156.2 Telecommunications 150.0 Forest Fire Management 136.5 Border Patrol 124.7 Pipeline Observation 75.4 Powerline Maintenance 60.1 Law Enforcement 35.2 Total 1,179
Source: Frost & Sullivan
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 113 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
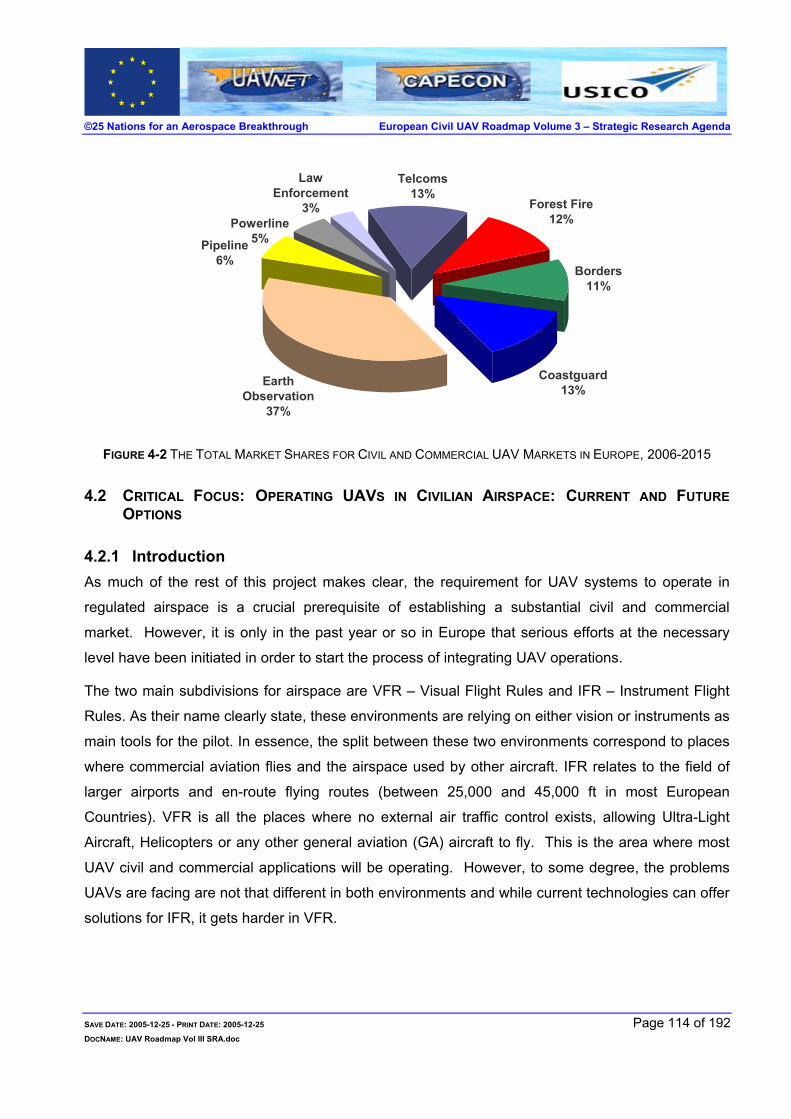
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Telcoms13%
Forest Fire12%
Borders11%
Coastguard13%
Law Enforcement
3%Powerline
5%Pipeline6%
Earth Observation
37%
FIGURE 4-2 THE TOTAL MARKET SHARES FOR CIVIL AND COMMERCIAL UAV MARKETS IN EUROPE, 2006-2015
4.2 CRITICAL FOCUS: OPERATING UAVS IN CIVILIAN AIRSPACE: CURRENT AND FUTURE OPTIONS
4.2.1 Introduction As much of the rest of this project makes clear, the requirement for UAV systems to operate in
regulated airspace is a crucial prerequisite of establishing a substantial civil and commercial
market. However, it is only in the past year or so in Europe that serious efforts at the necessary
level have been initiated in order to start the process of integrating UAV operations.
The two main subdivisions for airspace are VFR – Visual Flight Rules and IFR – Instrument Flight
Rules. As their name clearly state, these environments are relying on either vision or instruments as
main tools for the pilot. In essence, the split between these two environments correspond to places
where commercial aviation flies and the airspace used by other aircraft. IFR relates to the field of
larger airports and en-route flying routes (between 25,000 and 45,000 ft in most European
Countries). VFR is all the places where no external air traffic control exists, allowing Ultra-Light
Aircraft, Helicopters or any other general aviation (GA) aircraft to fly. This is the area where most
UAV civil and commercial applications will be operating. However, to some degree, the problems
UAVs are facing are not that different in both environments and while current technologies can offer
solutions for IFR, it gets harder in VFR.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 114 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
4.3 OPERATIONAL REQUIREMENTS
The real basic operational requirement for UAVs to fly in civilian airspace is to conform to general
certification rules. For Air Navigation Services Providers (ANSPs) it does not appear desirable to
create specific rules for UAVs compared to the other users. The need for UAVs to be certified for
flying is in the hands of EASA* or FAA* and when certified for that, their integration in the airspace
will be based on their ability to conform to general flying rules; not more, not less.
The main issue for UAVs, therefore, is to interact with other flying objects to avoid near-miss
accidents and ultimately collisions. It all comes down to combined: “See & Avoid” and “Situational
Awareness”.
4.3.1 Situational awareness Sharing an environment with other users in the air requires two disciplines; knowing that there are
other aircraft around you but also in turn providing them with the knowledge of your presence near
their flying route. This information is either given to pilots directly in VFR or Air Traffic Controllers in
IFR. VFR implies that the pilot can see you, therefore no technical equipment will be required on
board the aircraft. IFR, being based on instruments, does however represent a technological
challenge. As, by definition, UAVs do not have a visual pilot and that much of their utility lies in
their ability to operate beyond visual range autonomously, the solution for UAVs must be
instrument-based, even if the aircraft, with which it is sharing VFR airspace, relies on visual means.
Situational awareness is not only the awareness of the UAV or UAV pilot of its position but is also
the awareness of the surrounding aircraft. In VFR, it is visual and refers to the ‘see’ in “See and
Avoid”. For IFR the general awareness comes through visual identification of targets but more
commonly through the capacity of the pilot to hear the radio communication with other pilots
surrounding his aircraft. In the case of a UAV, it can create a problem if communications are
handled on the ground between the pilot and the Air Traffic Control Centre. In that case the other
pilot will not be aware of the moves that will be imposed on the UAV by ATC and thus miss a part of
the information that is vital for continued safe flight. Broadcasting a command in the air on VHF,
even if it is considered as very useful by pilots, is not realistic on the long run as radio frequencies
are getting more and more crowded and options like Data-link communications are being
investigated to reduce radio load.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 115 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
4.3.2 See & Avoid While part of situational awareness for VFR, See & Avoid is absolutely critical in IFR if any incident
occurs. Skies are crowded above Europe and many other areas in the world, and any actions taken
in the air can impact the other flying objects’ flight path. On the 23rd of August 2005, an Airbus 340
and a Boeing 737 came within 60 meters above Hungary. A collision was avoided only because of
the combined intervention of TCAS* and the pilots’ fast reactions. This capacity to “see” the other
object and “avoid” it is critical and UAVs will have to behave like any other aircraft in this regard. For
this near miss, technology was the answer and the use of it is probably a realistic technical solution
for UAVs.
4.3.3 Realistic options – Technological Solutions To remain realistic for the next five to ten years, it seems reasonable to forget VFR areas where
avionics equipment is virtually non-existing for aircraft flying VFR. This assumption, based on the
fact that UAV have to fly like any other aircraft, might be proven wrong by the will of some ANSPs
to close their Airspace in certain areas or at certain levels or at certain times, which, except for a
crisis, is not likely to occur.
For IFR or controlled space, the situation is completely different, as technology can serve UAV
operations to make them part of the global commercial transport community. Their behaviour can
be made 100% comparable to the other aircraft like their operational capabilities. Among
technologies that exist today, some can serve as the basis for defining acceptable situational
awareness for the users and See & Avoid capability.
4.3.3.1 Situational Awareness Without going too far in the future with ASAS* or Data-link communication, solutions exists to
provide the same level of situational awareness as exists today between manned aircraft.
Experience, like the use of the UAV as a communication relay with the “ground pilot”, does provide
a satisfactory solution.
As a next step the uses of ADS-B* transponders and CDTI* will offer a clear situation awareness,
but it is still a step that Manned Aircraft have to take and implementing such a technology in UAVs
would prove useless. More than just reducing the payload capacity it would also be based on non-
definitive ADS-B technology and would have to be replaced fairly soon compared to the product
lifecycle.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 116 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Having said that, the Manned Aircraft pilot situation awareness in controlled airspace is a comfort,
not a requirement, and even if it seems difficult to state it is useless, as it refers to safety, normal
operation can run without it. If ADS-B is fully implemented, it will become a requirement but current
solutions investigated are technology based and offer an option for UAVs.
4.3.3.2 See & Avoid The ‘see and avoid’ capability is much more critical, as it is the last safety net for controlled
airspace. Once again, existing technologies offer solutions that can be implemented in UAVs or
UAV system in their basic form, although they will require substantial modification.
Beyond normal operations where Air Traffic Controllers can perform their task with all due safety,
TCAS offers the ultimate ‘see & avoid’ capability to the pilot. It provides the pilot with a 1-3 minute
warning for approaching targets, and indicates the airspace zone to avoid, assuming that this target
is also equipped with TCAS as is mandatory in European airspace. Implementing this technology in
UAV systems is already under evaluation and is part of conforming to existing air navigation rules.
This would provide the UAV only or the pilot and the UAV in conjunction with valid information
(‘see’) and the required action for both objects (‘avoid’).
However, transferring this solution to VFR or uncontrolled areas is not realistic with the current
requirements for aircraft in this area. Experience based not on non-cooperative TCAS but laser-
based “direct environment surveillance” implemented in UAVs is under evaluation. This would offer
the UAV only, with the information (‘see’) and relevant action (‘avoid’). TCAS-type safety
technology, either cooperative or non-cooperative, a valid option for the “See & Avoid” capability.
Range for these systems satisfies safety requirements and the vibration related to a rapid descent
(assuming it would be possible with no traffic below) is not a constraint for an unmanned vehicle.
Some other technologies, on top of normal Air Traffic Management can offer earlier prevention tools
and would be an asset to get the approval for flying from ANSPs, for example TIS-B. TIS-B is a
solution developed for areas where less than 100% of aircraft are (as today and most probably for
the next decade) ADS-B equipped. The current air traffic management situation (position of other
aircraft, intent, altitude, etc…) is uploaded to the cockpit with the information on all flights. This has
been developed to provide information to those relying on CDTI on aircraft that are not ADS-B
capable. Providing this type of information to the flight computer of a UAV system (border
surveillance, forest fire management) would probably provide the UAV with the capability to
calculate its route with the lowest risk of near miss.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 117 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
4.4 CRITICAL FOCUS: KEY END MARKETS
4.4.1 Forest and Forest Fire Management
4.4.1.1 Introduction Forest fires in Europe are an increasing phenomenon and are a growing threat to people, homes
and the rural environment. It is also a market that has already attracted a substantial amount of
attention from the UAV community, which has generated a considerable degree of interest in those
agencies involved in spotting and managing forest fires. As such, it is expected that this will be one
of the first applications for UAVs, with trials already well advanced in the US and, more importantly
for the European market, in Portugal, Switzerland, Hungary and Croatia.
4.4.1.2 The Mission Due to the size and damage costs that forest fires can reach, the management of incidents needs
to be swift and decisive. The propagation of a forest fire, from its ignition to its high flame state, can
take a matter of minutes. This has produced a need for rapidly deployable sensors that can detect,
identify and track even the smallest fires across areas of the order of hundreds of square
kilometres. Current manned platforms have very restrictive loitering capability with a maximum of
four hours. Furthermore, the time from take-off to arrive ‘on station’ is substantial, as aircraft tend
to operate from regional airstrips, which restricts the utility of manned aircraft in tracking or spotting
forest fires. Not only is loiter time a factor in managing fires but it also crucial in fire prevention.
In assisting the actual operation of fire fighting, UAVs will be useful in tracking the course of the fire.
In particular, the ability of UAVs to go in amongst smoke where visibility would otherwise be poor
and collect visual information will considerably assist the overall fire-fighting effort.
4.4.1.3 Drivers
Rapid Deployment
Following ground detection of bush fires, by either human visual or sensor detection, airborne
monitoring of spreading bush fires may take a significant time to achieve using manned aircraft,
often based a long distance away from the hot spot. Man-portable UAVs are already under
investigation by forest fire services in the US and Europe as alternatives to manned aircraft, by
giving fire fighter teams a rapid-launch airborne surveillance capability. Due to the unpredictable
nature of bush fires, a rapidly deployable method of monitoring changes in direction and intensity is
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 118 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
needed, and UAVs can provide this capability, with lightweight imaging systems and short
endurance, making them easily carried by any fire fighter teams.
Force Multiplier
UAV systems will not replace all manned aircraft used in forest fire management. Clearly, UAVs
are some way off from having the payload capacity to drop water in large quantities on affected
areas. However, UAVs will also not be able to match the flexibility of many manned aircraft, which
can perform more than one task.
Despite this, UAV systems will have a wider role aside from simply as sensors. The use of UAVs of
whatever size will act as considerable force multipliers, not just in the air, but also across the full
spectrum of response. In a purely observation role UAVs will be able to give earlier warning to
enable a more rapid and coordinated response. Once a fire has caught hold, UAV systems will
also be able to provide persistent information in dangerous areas, to accurately track the path of the
fire. UAV systems are easily adapted to be local communication relays, which could be highly
useful for coordinating ground and air assets in the confusion and low visibility of a forest fire
situation.
Safety
Manned aircraft used in forest fires have a relatively high accident rate, which is not surprising
given the smoke, heat and often crowded airspace in which helicopters and fixed-wing aircraft have
to operate. Two aircrew were killed in France this summer.
Obviously, unmanned aircraft reduce some of the risk. However, UAV systems must first
demonstrate beyond a doubt that they would not add to the danger in congested airspace, given
that they will be operating alongside manned aircraft.
4.4.1.4 Restraints
Current Inventories
Civil response agencies currently have extensive aircraft inventories and, with the increasing
incidence of forest fires over recent years, these have been upgraded in a number of cases, most
notably the acquisition by the French Securité Civile of EC-145s. Many of these aircraft have been
purchased because of their long durability and flexibility.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 119 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Flexibility
As previously mentioned, the current aircraft used for forest fire management have inherent
flexibility. In particular, twin-engine helicopters can be used as transport, spotters and to carry
water for fire fighting. UAV systems do not have this similar inherent flexibility. Outside of the
forest fighting market, it should also be remembered that many of these aircraft are not just used for
forest fires but for other civil duties.
Operations alongside Manned Aircraft
The skies above a forest fire situation are generally highly congested airspace. The management
of aircraft performing forest fire tasks is already a complex operation with the inherent chance of
collisions and crashes. UAV systems, as they currently operate, do not have sufficient ‘sense and
avoid’ capability to be able to operate in such an environment. Until such time as this is developed
to a sufficient level, UAVs will not be able to be considered for use in significant numbers.
Data Processing
UAV-mounted sensors will gather much more information than manned aircraft, given their superior
loitering capabilities. A restraint will therefore not be the UAV systems themselves but the expense
associated with processing and analyzing the information collected by the end-user.
4.4.1.5 Market Forecast Frost and Sullivan estimates the market for UAV systems in forest fire applications to be €137m
between 2006 and 2015. This forecast is derived from an assessment of current aircraft inventories
in Europe for forestry and forest fire observation, an estimation of the type of UAV system required
adjusted by a factor of interest and understanding of potential end-users within the relevant
countries.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 120 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
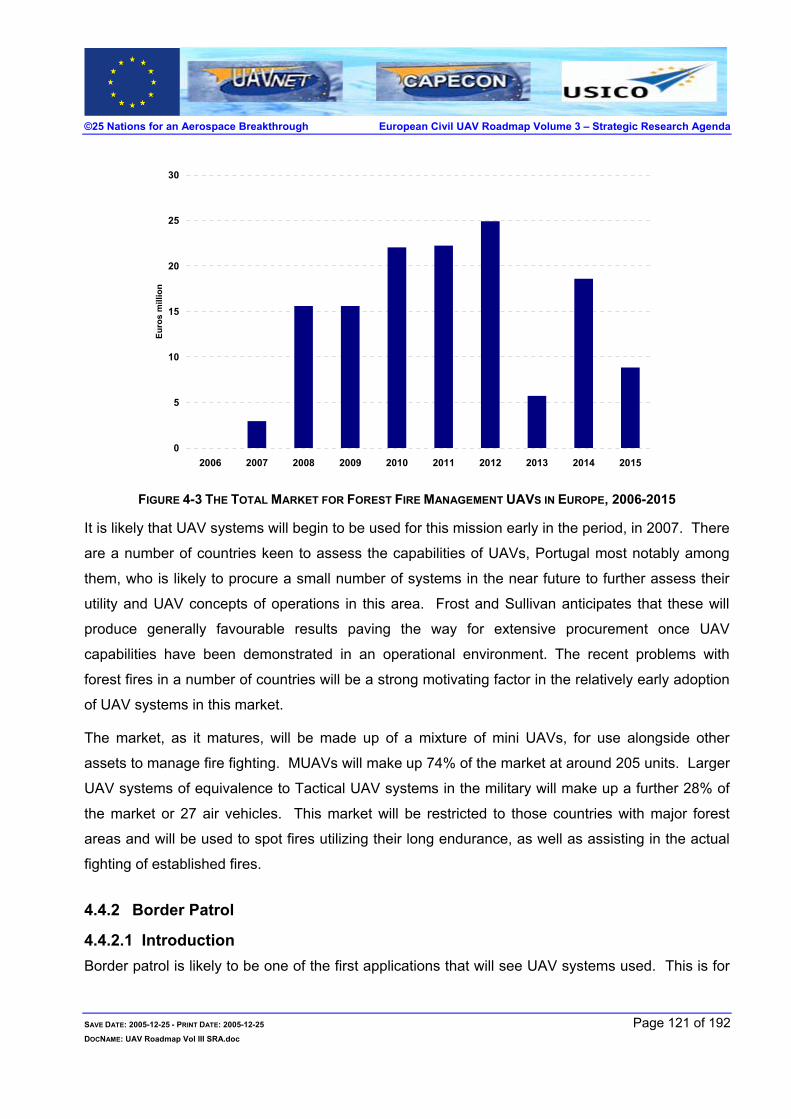
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
0
5
10
15
20
25
30
2006 2007 2008 2009 2010 2011 2012 2013 2014 2015
Euro
s m
illio
n
FIGURE 4-3 THE TOTAL MARKET FOR FOREST FIRE MANAGEMENT UAVS IN EUROPE, 2006-2015
It is likely that UAV systems will begin to be used for this mission early in the period, in 2007. There
are a number of countries keen to assess the capabilities of UAVs, Portugal most notably among
them, who is likely to procure a small number of systems in the near future to further assess their
utility and UAV concepts of operations in this area. Frost and Sullivan anticipates that these will
produce generally favourable results paving the way for extensive procurement once UAV
capabilities have been demonstrated in an operational environment. The recent problems with
forest fires in a number of countries will be a strong motivating factor in the relatively early adoption
of UAV systems in this market.
The market, as it matures, will be made up of a mixture of mini UAVs, for use alongside other
assets to manage fire fighting. MUAVs will make up 74% of the market at around 205 units. Larger
UAV systems of equivalence to Tactical UAV systems in the military will make up a further 28% of
the market or 27 air vehicles. This market will be restricted to those countries with major forest
areas and will be used to spot fires utilizing their long endurance, as well as assisting in the actual
fighting of established fires.
4.4.2 Border Patrol
4.4.2.1 Introduction Border patrol is likely to be one of the first applications that will see UAV systems used. This is for
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 121 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
three reasons. Firstly, the mission itself is ideal for UAV systems as it places a premium on long
endurance. Secondly, many of the agencies that are involved in border patrol are military or
paramilitary bodies. Thirdly, illegal immigration and the threat of terrorism mean that funding has
been made available for ‘homeland security’, including substantial EU funds for new and aspirant
EU members.
4.4.2.2 The Mission Borders are monitored and protected by border patrol forces, which use video cameras, ground
sensors, physical barriers, land vehicles and manned aircraft. The diverse nature of this border
defense is challenged by an equally diverse array of threats, ranging from terrorists to drug
smugglers, arms dealers, and human trafficking. More recent issues in securing borders have been
concerning fears that terrorists could exploit existing border vulnerabilities by crossing illegally.
In the past, offenders have found it easiest to enter countries through mountainous, remote border
areas at night where manned airborne surveillance is deemed to dangerous to undertake. The most
recent examples of UAV applications are the trials conducted by the U.S. Customs & Border Patrol
along the U.S. border with Mexico and Russia’s acquisitions of UAVs from Israel for security
applications. Other areas where issues of border security have been raised and UAVs could have a
role to play in Europe: Greece-Albania, Poland-Belarus, Romania, and elsewhere, including
Australia’s outlying Islands and India-Bangladesh borders.
4.4.2.3 Drivers
Persistent surveillance
Remote and rugged terrain often limits ground patrols in achieving complete surveillance of borders
and illegal immigrants often use this to their advantage. Manned aircraft are an expensive solution
and can often be limited to daylight flights as well as by pilot endurance. UAVs can offer complete
coverage in all weather, day or night, for many hours and can alert ground border security forces to
incidents as they occur.
Real-time monitoring
High-resolution optical cameras, combined with infrared modes and even radar, enable data links to
transmit real-time footage of required areas, in virtually all weather conditions, day or night. Ground
operators can then choose to fly in for a closer look at a suspected incident and co-ordinate ground
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 122 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
forces to deal with the situation as, or even before, events develop.
4.4.2.4 Restraints
Unclear Level of operational costs
Many potential end-users, for example, border police, see the cost-savings offered by UAVs in
terms of operation and maintenance costs. However, frequent operations will require setting up a
completely new maintenance infrastructure and training personnel in the field of UAV maintenance.
Therefore, it is still unclear as to how much of a saving a large UAV fleet could offer. The military
segment has seen cost savings as well as cost overruns concerning UAV development and
operations, confirming the difficulties posed when attempting to assess the costs. Many states that
require border surveillance and security systems do not have the necessary funding to initiate and
support projects, and cost remains a hurdle for the market.
Alternative Remote Sensors
Some border security forces today utilise ground motion sensors to alert forces to trespassers.
Ground-based Electro-optic and infrared sensors are often placed in areas to alert security forces of
illegal movement. While UAVs offer a larger field of view for beyond perimeter surveillance, they
cannot substitute for wall-mounted security systems.
Data Processing & Dispersal
Due to restraints such as bandwidth, processor power, and lack of standardised interfacing,
processing information from multiple UAV sensors and dispersing information to ground elements is
limited. Efforts, to increase reliability by enhancing integration, results in increased costs.
Advantages of integration such as less wiring and fewer connections increase reliability of the
whole system in the long term. In general, integrating sensor & processor modules, as well as data
dispersal to fire fighter teams via hand held P.C. units, will likely be the most expensive processes
incurred by UAV manufacturers.
4.4.2.5 Market Forecast The market for UAV systems for border patrol, may well be one of the first UAV markets to develop
but the market will be small, given the relatively short amount of land border that will feasibly be
needed to be monitored by air assets and the extensive land-based sensors that proliferate in
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 123 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Europe. The European borders that Frost and Sullivan estimates will require air assets for
surveillance is just 6,166 km comprised mainly of the EU and future EU borders to the east and
some others such as Greece’s border with Albania.
A further restriction of the market is that in Europe only TUAV systems are likely to be required,
unlike in the US where MALE systems are the most likely candidates. This is because, although
the total border length may be equivalent to the US borders, it is split between several countries
that will be responsible only for their section. In no case does this warrant a MALE UAV system
whose capabilities will be beyond what is required and whose price may also be beyond what is
acceptable.
Frost and Sullivan estimates the UAV market for border patrol to be worth €123m between 2006
and 2015. The largest markets are likely to be in Poland and Finland. The market will develop
relatively quickly, with the bulk of acquisitions occurring between 2010 and 2013.
0
5
10
15
20
25
30
35
2006 2007 2008 2009 2010 2011 2012 2013 2014 2015
Euro
s m
illio
ns
FIGURE 4-4 THE TOTAL MARKET FOR BORDER PATROL UAVS IN EUROPE, 2006-2015
4.4.3 Maritime Surveillance
4.4.3.1 Introduction Maritime surveillance is already a substantial market for UAV systems, given the US Coast Guard’s
acquisition of 68 Eagle Eye systems. Most UAV systems for coastal patrol and duties will not be
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 124 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
tilt-rotor VTOL systems as these will be beyond the financial resources of similar bodies in Europe.
4.4.3.2 The Mission Coastal surveillance relies on the principle of 'security through depth'. Patrol aircraft (both military
and customs) use a combination of visual and electronic detection methods (including powerful
search radar, heat-detecting infrared sensors, searchlights, and high-resolution video cameras —
the latter being useful for tracking suspect smuggling vessels as well as recording fisheries and
pollution violations.) The goal is to find the alien vessel or aircraft and respond well before it can
reach shore or overfly the country. Patrol boats of the Customs Marine Fleet can intercept smaller
vessels while, as mentioned above, naval frigates intercept larger ships. Military patrol aircraft are
regularly made available for the detection of both airborne and seaborne intruders. Finally, aircraft
have to be able to operate in extreme weather conditions.
4.4.3.3 Drivers
Persistent Surveillance
UAV systems offer a clear advantage over manned aircraft in terms of their endurance and this is a
key capability for coastal and maritime surveillance. Much of the patrol work is routine and
uneventful, covering wide stretches of water. This necessitates long missions and, in manned
aircraft, is limited by human fatigue. UAVs have a considerable advantage in being able to stay
aloft for far longer and also to be able to track and monitor specific targets for long periods.
Increasing Scope of Maritime Surveillance
Civil bodies charged with coastal and maritime surveillance have seen an influx of funds over the
past decade as the importance of their task has grown. Illegal immigration, fishing disputes,
terrorism and the general increase in sea-borne trade has put these organizations on the front line
of several key environments.
UAVs offer many capabilities that can help with the greater burden. UAV systems can complement
current manned assets as well as replace them, for example spotting, tracking and cueing-in
manned surface and air assets onto targets of interest.
Rapid Deployment
UAVs can be launched within seconds from a land or vessel-base, with high-speed cruise to an
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 125 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
area for long endurance search activities. Typically, upon call-outs, Coast Guard aircraft often take
approximately fifteen minutes to get airborne and underway to a target area. UAVs can save
surface vessels and manned aircraft much time by providing rapid search capabilities and co-
ordinating with surface vessels and manned aircraft, directing rescue services straight to a target.
Given the vast distances over which aircraft have to operate in a maritime environment, the time to
get ‘on-station’ is critical as it can take a manned aircraft between 1-2 hours to arrive which also
effects their loitering period and ability to track targets over long periods of time.
4.4.3.4 Restraints
Integration
Many questions surround the issue of integrating a UAV fleet with manned aircraft to provide a
comprehensive search and rescue service. In particular, current manned Coast Guard aircraft
utilise directional finders to home in on distress beacons. Issues exist such as whether UAVs can
be fitted with navigation to locate these beacons and cruise at high speed to them, while at the
same time co-ordinating via UHF/SATCOM links with fixed-wing and helicopter units to enhance
their flight times to the target.
Flexibility
A key capability of manned SAR aircraft is the ability to not only locate persons or ships in distress,
but to also offer immediate rescue aids upon identification. For example, aircrews on board the
Nimrod fixed wing aircraft can locate stranded persons and drop life-saving equipment to them, and
helicopters can even winch them up to safety. UAVs at this point are not large enough to carry life-
saving equipment and therefore cannot offer any kind of rescue aids upon immediate identification
of a person who would need them.
Diffused Customer Base
In many European countries, several civil, military or paramilitary agencies have responsibility for
coastal and maritime surveillance. In some ways, this complex web of responsibilities may aid UAV
procurement given that budgets for the military are generally higher for platform acquisitions.
However, there is a strong likelihood that this diffuse structure will limit the ability of agencies to
pool resources in order to finance UAV system acquisitions, meaning that the market may well be
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 126 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
smaller than might otherwise have been the case.
4.4.3.5 Market Forecast Frost and Sullivan analysis reveals that UAVs, principally MALE UAV systems, will begin to replace
current inventories of fixed-wing aircraft operated by Coast Guards and customs services in several
countries in Europe. The market will be worth €156m between 2006 and 2015.
This market will not include VTOL UAVs or any replacements of current helicopter inventories.
These aircraft have a vital SAR (search and rescue) role and UAV systems simply cannot approach
their versatility.
The largest individual markets will be in the large maritime nations such as the UK, France and
Spain, but the Italian market will also be sizeable and Italy is also likely to be an early adopter of
UAV systems in this role.
0
10
20
30
40
50
60
2006 2007 2008 2009 2010 2011 2012 2013 2014 2015
Euro
mill
ions
FIGURE 4-5 THE TOTAL MARKET FOR MARITIME SURVEILLANCE UAVS IN EUROPE, 2006-2015
4.4.4 Law Enforcement
4.4.4.1 Introduction Law enforcement applications for UAV systems have received considerable interest from law
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 127 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
enforcement agencies in the US, Israel, Holland and Australia. However, the use of UAV systems
for law enforcement might prove problematic in a European context.
4.4.4.2 The Mission There are a variety of law enforcement missions that have been suggested for UAVs. Traffic
monitoring is one and has actually been implemented on an ad hoc basis in Switzerland, when the
Swiss police requested the use of the Air Force’s Ranger UAVs during particularly busy parts of the
summer, as well as in the US and Israel as part of trials. Secondly, crowd and riot control, as well
as general surveillance, are other possible applications. Finally, the use of mini UAVs by police
officers before they approach a potentially dangerous situation or crisis area has been suggested.
Currently, almost all airborne police tasks in Europe are done by helicopter, which are generally
equipped with visual cameras, IR sensors as well as spotlights. Police helicopters are not as
numerous as might be apparent to those who live in major cities, with 3-4 being considered a
sufficient helicopter inventory for law enforcement purposes. Flexible but expensive platforms,
again twin-engine helicopters, built to a high specification, are the norm for police forces across
Europe and can be used for each of the tasks outlined above. Typical acquisition costs are €4 -
€5.5 million per helicopter with operational costs that can reach €1 million per year.
4.4.4.3 Drivers
Endurance
Endurance can be a drawback for helicopters involved in some police tasks, for example crowd
monitoring. However, it should be noted that endurance is not a key component of most law
enforcement tasks. A traffic-monitoring mission or even car chase very rarely takes longer than
three hours, which a helicopter and crew can easily cope with.
Cost
Police helicopters are generally built to a high specification and are also packed with two or three
sensors. The total cost of a helicopter for a modern police force is between €4m and €5.5m with
operational costs running at between €450,000 and €1m per year. This is a considerable outlay but
it should also be borne in mind that these aircraft carry a heavy payload and are also used in a wide
range of tasks.
UAV systems would likely be much cheaper and also would cost less to run with the removal of the
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 128 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
observer as well as the pilot. Even a mixture of UAV systems and manned aircraft would allow
forces to reduce its manned aircraft inventory and make considerable savings.
All-Weather Capability
In most European countries, civil aviation authority regulations restrict low-level helicopter flights in
bad weather. UAVs will be available to fly 24hrs. daily year-round.
4.4.4.4 Restraints
Cultural Resistance
Much of the work, which airborne assets undertake for the police, takes place in an urban
environment. Police forces around the continent have a relatively higher sensitivity to potential
safety issues with UAVs than many other end-users. This suggests that there is a strong cultural
resistance to using UAVs in a law enforcement role.
Flexibility
Helicopters involved in law enforcement roles are expected to perform a number of roles from
observation, monitoring and tracking, search and rescue, crime scene investigation and also having
a general deterrence effect with its noise, loudhailer and spotlight.
UAV systems are not able to replicate this flexibility to anywhere close to the same degree and this
is a considerable hurdle for the UAV community to overcome in penetrating this market.
4.4.4.5 Market Forecast Given the interest of some police forces, Frost & Sullivan expects the market to be worth €40m,
€15m for mini-UAVs and potentially another €25m for small Tactical UAVs. The latter market will
only develop once regulations are in place. The outlook for the market for the longer term is likely,
however, to be much more substantial.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 129 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
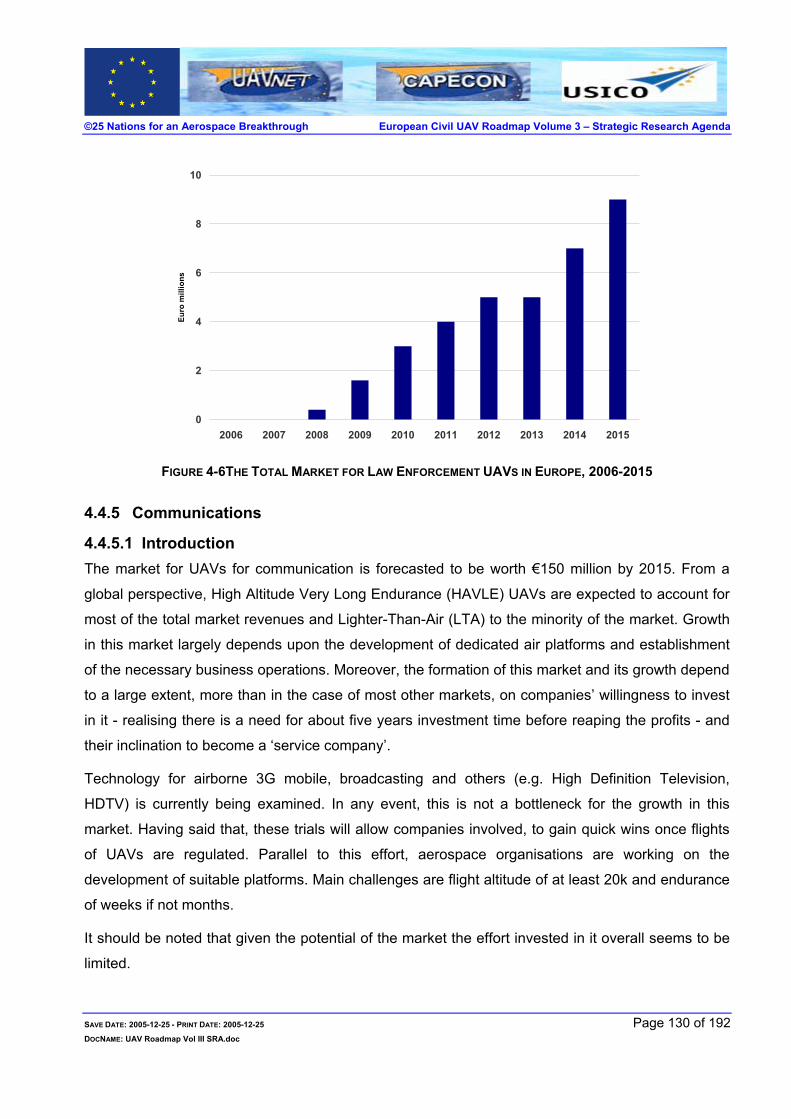
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
0
2
4
6
8
10
2006 2007 2008 2009 2010 2011 2012 2013 2014 2015
Euro
mill
ions
FIGURE 4-6THE TOTAL MARKET FOR LAW ENFORCEMENT UAVS IN EUROPE, 2006-2015
4.4.5 Communications
4.4.5.1 Introduction The market for UAVs for communication is forecasted to be worth €150 million by 2015. From a
global perspective, High Altitude Very Long Endurance (HAVLE) UAVs are expected to account for
most of the total market revenues and Lighter-Than-Air (LTA) to the minority of the market. Growth
in this market largely depends upon the development of dedicated air platforms and establishment
of the necessary business operations. Moreover, the formation of this market and its growth depend
to a large extent, more than in the case of most other markets, on companies’ willingness to invest
in it - realising there is a need for about five years investment time before reaping the profits - and
their inclination to become a ‘service company’.
Technology for airborne 3G mobile, broadcasting and others (e.g. High Definition Television,
HDTV) is currently being examined. In any event, this is not a bottleneck for the growth in this
market. Having said that, these trials will allow companies involved, to gain quick wins once flights
of UAVs are regulated. Parallel to this effort, aerospace organisations are working on the
development of suitable platforms. Main challenges are flight altitude of at least 20k and endurance
of weeks if not months.
It should be noted that given the potential of the market the effort invested in it overall seems to be
limited.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 130 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Key challenges facing the companies wanting to explore this market include getting internal buy-in
and budgets for the development of solutions to a market that might only materialise in five to ten
years. From a European point of view, the challenge is even greater as first markets to materialise
will not be European.
4.4.5.2 The Mission Once established, commercial communication will be a novel niche in the aerospace market.
Manned aircraft has been fulfilling communications missions, mainly in the military domain, for
years now but not as ‘mass communication’ platforms (i.e. as tactical communication relay).
To be able to supplement and to replace base stations and satellites, UAVs will need to be able to
fly at 20km (65,000 feet), carry a payload of several hundreds kilograms, loiter for weeks and be
geo-stationary (or at least close to being geo-stationary).
According to F&S analysis, the market is expected to follow some business and technology trends.
On the technology side, emergence of more efficient solar array and lightweight fuel cell power
plants will become primary technology enablers extending endurance beyond the current capability
of hours and days into the weeks and months. This will also determine having electric motors based
propulsion systems. Configurations suggested by CAPECON and others might well be a good
indication for future designs yet at this stage it is hard to evaluate that.
Business-wise the market will be service-based. Communication suppliers (e.g. cellular operators)
are interested in the solution not the means. Even in the end, it is not likely that operators will be
interested in having these capabilities in-house. This implies the need for the establishment of the
appropriate providers.
To win opportunities in this market in 5 years, companies need to invest now.
While European companies are not doing so, their US counterparts are. Surprisingly, that is exactly
what has happened in the military UAV market leading to the market dominance of American and
Israeli systems. Yet, most European companies do not try to act as if they want to change this
situation or to prevent it from happening in other market niches (e.g. communications). Perhaps
UAVs are still seen as marginal fashionable phenomena and not a paradigm change. Perhaps they
are not willing or cannot make the necessary investment to make the change. Perhaps they do not
get enough institutional / governmental help so needed to make this change.
The critical success factors in the communications market for UAVs are different from those in the
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 131 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
military UAV market. This implies a great opportunity for lagging companies to finally close the gap.
This also opens the door for companies that were not involved so far in the UAV market to excel.
This market, similar to the rest of the civil and commercial market, is in a unique growth phase, as
on one hand it is emerging depending on radical paradigm change and on the other, on mainstream
technology. This means that it needs to grow, at the same time, through creativity, direction and
collaboration. It needs entrepreneurialism and at the same time, capital management and team-
based problem solving. Any successful growth will be relying at the same time on start-up
companies, SMEs, universities, well-established companies and governmental support.
Currently, AeroVironment is in the best position to become a world leader in this niche. Their
winning resources are based on having a strong backbone and steady cash flow (mainly through
the DoD), having the time aspect on their side, governmental support for funds and other (i.e.
through NASA) and last yet not least, a strong corporate sense of direction.
4.4.5.3 Drivers
Cost Savings
This could prove to be the most important driver in this market.
Analysis suggests that UAVs’ life cycle cost will be much cheaper compared to satellite and ground
sites. This is mainly due to lower procurement cost (i.e. ‘non-recurring expenditure’) and longer
lifetime compared to satellite and better coverage compared to ground sites. Furthermore, there is
the issue of cost of infrastructure in remote areas which can be critical in areas where base stations
are likely to frequent thefts (It should be noted that assumptions, mainly regarding running costs
and lifetime, are yet to be put to the test).
Flexibility
Remarkably, this market driver is the source of the advantage UAVs have over satellites, ground
base stations and LTA. While satellites cannot be routinely rerouted UAVs can. Though in theory
LTAs can be flexible, though much slower than UAVs, in practice, relying on large infrastructures,
they are to a large extent limited in flexibility (e.g. as LTAs are expected to be hundreds of meters
long, their hangers needs to be just as big. Also, they will require large inflating and deflating
equipment).
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 132 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Scalability
This driver will pay its dividend from operational and business points of view. From an operational
point of view, the ability to support growing needs is an advantage and from a business point of
view this will allow to ‘build as you go’ financing and ploughing back profits.
Upgradeability
The day a satellite is launched, it is already carrying an aged payload technology, at least five year
old. Toward the end of their life, they carry payloads that are ten to 20 years old. UAVs have the
ability to be upgraded at no extra cost and as part of their normal maintenance process. In that
respect, they are like base stations.
Versatility
Same platforms can perform other missions at the same time or between missions e.g. as part of
disaster management, urban monitoring or homeland security (HLS). This means better utilisation
of the assets, or lower life cycle cost, and will allow an effective implementation of the ‘service
provider’ business model.
Reduced Health Risk
Ground base cell stations are consider by some as a health risk. Increasingly it becomes harder to
position them freely either by law or due to public opinion (e.g. schools). The ability to perform the
same mission ‘risk free’ will gradually become ever more attractive.
4.4.5.4 Restraints
Potential End Users Awareness
There will be no demand without awareness. Though trivial, it has so far not yet been seriously
addressed by most companies. This should come under companies’ overall long and mid-term
investment in their market and as part of their long and mid-term strategy plans.
Achieving clients’ awareness is not a ‘one off’ event. It is a long education process. Short of that, all
marketing efforts appear to be a ‘technology push’ (as opposed to the desired situation of creating a
market pull).
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 133 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Regulations
Without adequate regulation, a civil market for UAV based communication will not be formed.
According to F&S analysis, at the beginning of the next decade (i.e.2011), these regulations will be
in place.
It is also worth mentioning that UAVs for communications are probably the easiest class of UAVs to
integrate in unrestricted airspace. That is because of their expected altitude of flight (i.e. above
commercial aviation) expected long endurance (implying less take-off and landings), and size
(allowing implementation of ‘manned’ COTS systems).
In the US, regulation for operation of UAVs at this altitude will be formed even earlier, that is in
approximately two years.
Business Focus
Currently most UAV players are geared to win opportunities in the military market. Consequently, it
boils down to low internal ‘buy-in’. This leads to low R&D investment, to low marketing investment
(which in turn leads to lack of end users’ awareness) and to lack of clear strategy for winning
opportunities in a future civil market.
Lead-times for developing this market, both from a technology and business point of view, are long,
which means that to be competitive in five years, companies should act now.
4.4.5.5 Market Forecast One cannot overstress the importance of the role, industry and regulating and other governmental
bodies have on determining the size of this market. As the need and the competitive advantage are
clear, the market size can exceed the F&S forecasted market. For the same reason, passiveness
will lead to either American companies winning the lion’s share of the market for UAV-based
communications in Asia, Africa, the Middle East and Europe. The fact that cost savings are an
important revenue driver and at the same time not based on experience makes the need for case
studies before making investment decisions even more acute. It also depends on the joint effort of
several organisations and will not be initiated due to the success of one player.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 134 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
0
10
20
30
40
50
60
2006 2007 2008 2009 2010 2011 2012 2013 2014 2015
Euro
s m
illio
ns
FIGURE 4-7 THE TOTAL MARKET FOR COMMUNICATIONS UAVS IN EUROPE, 2006-2015
The market for UAVs for communication is forecasted to be worth €150 million by 2015.
According to F&S analysis the fist communication node, consisting of one air vehicle at a value of
€25 million will be operational by 2012. According to this analysis, by 2015 there will already be six
operational air vehicles, supporting two nodes. It should be noted that this forecast is not based on
identification of specific opportunities.
According to F&S analysis, it is not likely that UAVs will be used for communication in Europe
before 2012 and that overall by 2015 there will be a demand for more that two nodes, i.e. six UAVs
at a value of €150 million. The first UAV-based communication node is likely to be established in
Asia, perhaps in Japan, South Korea or Singapore. Furthermore, it is likely that, within this
timeframe, two nodes will be established in Africa and one in the Middle East.
In all cases, the business model will be service-based.
4.4.6 Earth Observation
4.4.6.1 Introduction Earth observation is a less defined market than the other key UAV markets discussed. Earth
observation refers to a UAV system, most likely a HALE system, that can deliver the best aspects
of satellites, such as wide coverage and high endurance, combined with the precision, in terms of
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 135 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
both positioning and image quality, of manned aircraft. As with these platforms, the market that
UAVs will look to exploit is diverse, covering customers who demand imagery from areas such as
agriculture, urban planning, cartography, crisis management, real estate, road planning, pipeline
surveillance and supporting security agencies on land and at sea. As has been noted, a HALE
UAV platform operating in these markets may overlap with some of the markets that have already
been discussed.
However, the difference is that these platforms are unlikely to be dedicated solely to one area and
therefore, as customers in other markets may not want to be subject to the restrictions that sharing
a platform implies an earth observation, UAV systems will likely compliment and not displace other
UAV activities at lower altitudes.
4.4.6.2 The Mission Currently there is a well-established global market in satellite remote sensing, estimated by Frost
and Sullivan to be worth €5bn in 2005. Satellite operators in Europe utilize a network of satellites to
provide imagery at a variety of resolutions to a variety of customers in both civil and commercial
spheres. The sensors utilized are in most cases panchromatic cameras, but also multi-spectral
imagers and some SAR capability.
Nevertheless, the satellite remote sensing business is expensive to operate in, with high launch
costs passed onto the consumer, particularly for multi-spectral and SAR images. For example, a
typical hyper-spectral image would cost approximately €3,000. Companies operating in this area
also have data manipulation services on offer, to deliver images and information in a user-friendly
manner to customers.
A further drawback of satellite remote sensing operations is that timeliness is a constant issue.
Satellite constellations are unable to offer ubiquitous coverage and cannot guarantee images due to
the possibility of cloud cover. When this is the case, satellite imagery is supplemented by imagery
collected by manned aircraft, which are also expensive at approximately €450 to €600 per hour.
4.4.6.3 Drivers
Flexibility
Remote sensing satellites are bound to strict orbits, which restrict both their timeliness and
responsiveness. A HALE UAV system, once perfected, would be inherently more flexible, able to
loiter over an area of interest at the required moment.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 136 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
A HALE system would also combine different sensors to provide a more detailed and varied picture
for customers. At present, satellites have yet to fulfill this requirement.
Cost
An integrated HALE UAV system should be cheaper to launch and manufacture than satellites
involved in similar roles. Stock imagery can be had "on the cheap", but, for example, a commercial
real estate firm may request a 1-foot resolution colour imagery of a specific location at a specific
time with a predetermined set of attribute data. The real estate company may only have a budget of
$5,000, but such a customized imagery and information product may costs between three and ten
times that amount, depending upon availability.
A UAV system, with lower launch, operation and re-routing costs, would be able to provide the
same image at a lower cost, perhaps more in line with small, ad-hoc users’ budgets.
Availability
Lack of availability is a key drawback for remote sensing satellites. Many of the end customer
markets find the inability of satellites to return quickly to the same location problematic, for example
in crisis management or agricultural monitoring, to name but two.
Furthermore, with the addition of a SAR payload, cloud conditions will pose less of a problem to
image collection than on satellites, and at a reasonable cost. Currently, satellite imagery needs to
be supplemented by manned aircraft flights when meteorological conditions block remote satellite
sensing.
Image Quality
A UAV payload can deliver images with between 15-20 cm resolution and 15-20 cm pixel size,
which no current satellite can match. High image resolution is an important component for many
end-users, in particular for urban planners, cartography, agricultural and vegetation mapping.
Frost and Sullivan has estimated the market for global remote sensing revenues up to 1 m
resolution between 2005 and 2010 as €2.1bn, of which Europe will make up approximately 30%,
with a CAGR of 8%. This market is currently underserved by the LEO satellite providers and will be
an entry point for prospective UAV remote sensing service providers.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 137 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
4.4.6.4 Restraints
End User Needs Vary Widely
Another aspect is the many and varied end-user needs. Across a broad spectrum of military,
government and commercial users is a myriad of sensor, temporal and spatial resolution needs.
Thus, the ability to market to users in multiple applications is highly problematic. UAV service
providers will have to be subject either to diverse revenue streams or reliant on a select group of
customers who demand high-end imagery.
Existing Satellite Platforms
The remote sensing market for satellites is already well established and many of the data providers
in Europe also have sophisticated data refinement and analysis operations that add considerable
value to the imagery product.
High Technology Threshold
Perhaps the key barrier to UAV remote sensing markets is the technological challenges presented
by the platform itself. HALE UAV systems are the most complex of UAV systems to design,
manufacture and operate. They are also the most expensive.
Most problematic of all is to enable a HALE UAV to stay aloft for weeks or months at a time. A
power system and efficient flight control mechanisms present considerable challenges. This is
largely a question of integration of existing technologies in a high altitude platform, but none the
less complex for all that.
4.4.6.5 Market Forecast The market for earth observation is likely to be the largest potential market for UAVs, which is not
surprising in that it is a well established, global, commercial industry already. Using very
conservative assumptions and focusing on the sub-1 m resolution market, the market is likely to
reach €442m between 2006 and 2015, assuming the technological challenges can be overcome.
The 13’’ to 0.99m market is likely to be the most lucrative for UAV systems at €180m, with 1’’ to 1’
to be worth €187m and 1m- 2.9m market, of which UAV systems are likely to capture a smaller
share, will be worth €133m.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 138 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
0
50
100
150
200
2006 2007 2008 2009 2010 2011 2012 2013 2014 2015
Euro
mill
ions
FIGURE 4-8 THE TOTAL MARKET FOR EARTH OBSERVATION UAVS IN EUROPE, 2006-2015
4.4.7 Pipeline Observation
4.4.7.1 Introduction Pipeline monitoring is a relatively stable market with good prospects of market expansion. Demand
for gas in Europe is forecast to increase substantially leading to a significant increase in gas
consumption as a proportion of overall energy consumption. UAV operation is also well suited to
the demands of the task required.
4.4.7.2 The Mission Gas pipeline monitoring in Europe is currently done by helicopter or by walking along the length of
the pipeline. Inspection requirements differ but in most European countries, pipelines have to be
inspected regularly throughout the year to ensure pipeline integrity is not threatened by excavation,
building or other encroachment close to the pipeline itself. Leak detection is not as yet done
regularly from the air although LIDAR technology is being developed to produce a sensor that can
detect leaks from the air. The mission currently remains a purely visual exercise and relatively
simple. The expense comes from the necessity for frequent inspection.
Unlike powerline inspection, pipelines can be inspected from the air by aircraft flying at a much
faster speed and a much higher altitude, up to 250 kph at approximately 2,000 ft. Thus, costs are
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 139 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
much lower per line kilometer, between €3 and €5, while using ground-based teams is
approximately 4-5 times more expensive.
This market, given the stable conditions of the underlying gas transmission market, will be mainly
about capturing market share rather than exploiting new demand opportunities. This tends
therefore to place the emphasis on cost and service provision for UAV services companies wanting
to participate in these markets.
4.4.7.3 Drivers Simple Mission well Suited to UAV Systems
The linear nature of pipelines and the relatively simple parameters required for the mission (i.e.
speed and altitude) mean that the technological challenges are relatively small for this market. A
UAV system can be easily programmed to follow a straightforward route at speed. Furthermore,
the UAV system need not be a VTOL system but a fixed-wing system, which will have longer
endurance, less risk and may be cheaper.
Cost
A helicopter can currently observe between 1000 to 1200km per day given a cruising speed of
250kmh, operating for a maximum of five hours a day. A TUAV system would fly slower but for
longer as pilot fatigue would no longer be a factor. Furthermore, the costs, associated with paying
for an observer, such as insurance and salary, would be eliminated.
High Resolution Imaging Capacity
Electro-optics are more advanced than ever, and high-resolution imaging is widely available for
airborne applications at relatively low-cost. For pipeline survey applications, the level of
sophistication required is not very high, and high-resolution, wide-field-of-view, low power cameras
are now being used for a variety of applications.
End-User Interest
Pipeline monitoring is one of the few potential civil and commercial applications that has received
substantial interest from potential end-users. Gas transmission companies in France, Germany,
Russia and the US have conducted trials using UAV systems for pipeline monitoring.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 140 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
4.4.7.4 Restraints
Safety Concerns
One aspect that will slow the market for UAVs in pipeline monitoring is concern over safety, which
is a function of the wider problem of certification and integration into civilian airspace. End-users
are understandably still concerned over the safety record of UAVs. In pipeline monitoring missions,
UAVs will be flying over inhabited areas and will have to be able to negotiate fixed and flying
objects on their flight path, such as power lines and other aircraft. A fully functional ‘sense and
avoid’ capability is therefore essential to exploiting the business opportunity presented by this
particular market.
4.4.7.5 Market Forecast The market for UAV pipeline monitoring will be small at approximately €16.3m. However, the entire
market for airborne pipeline monitoring is not large at under €100m.
The market for UAV pipeline monitoring will, however, grow steadily from 2009/2010 to capture an
estimated 40% of the entire pipeline monitoring market by 2015.
-
1.0
2.0
3.0
4.0
2006 2007 2008 2009 2010 2011 2012 2013 2014 2015
Euro
s m
illio
ns
FIGURE 4-9THE TOTAL MARKET FOR PIPELINE MONITORING UAVS IN EUROPE, 2006-2015
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 141 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
4.4.8 Powerline Maintenance
4.4.8.1 Introduction Powerline inspection is an ongoing necessity for electricity generating and transmission companies.
The market is currently substantial with very consistent and stable demand.
4.4.8.2 The Mission Powerline inspection is the process of inspecting the pylons and the insulators on the pylons
themselves. This is a process that can be done by foot patrol, which is time-consuming and costly.
Increasingly, the mission is being performed by helicopter.
Powerline monitoring is a mixture of routine observation, utilising an observer and a pilot flying at
10-15 Knots, and thermal inspection utilising a pilot with an IR camera flying at 50 Knots.
Essentially, the larger transmission lines are inspected once a year with smaller lines being
inspected once or twice every 3 years.
The helicopter itself needs to be powerful enough to withstand wind gusts that might push it into the
line itself, a very expensive accident should it occur. Thus, a twin-engine helicopter is the safe
optimum. The helicopter currently performs standard observation from a distance of 20ft. above the
ground and 10-15ft. up and right of the powerline itself. For IR camera surveillance, the helicopter
is able to stand off at a distance of 300-400ft. Given this proximity to the ground, there is also a
strong requirement to keep noise levels and disruption to livestock and the population at a
minimum, which often restricts the hours for use.
On average, a helicopter can cover between 130 and 150km per day depending on the type of
mission. A twin-engine helicopter typically costs between £400-500 per hour to hire.
The powerline monitoring business is a mixture of in-house aerial surveillance run by electricity
transmission companies and work contracted out to air service companies. Running costs over the
year for a typical large electricity company is in the region of €150m a year whereas contract work
is charged at between €600 - €750 an hour, or approximately €3,000 – €3,750 a day.
There are now major changes likely in terms of the electricity transmission business itself apart
from the possible impact of the decline of gas generating stations in parts of Europe. Having
increasingly preferred gas to coal-fired generating stations, the electricity generating industry is
likely to face increasing financial problems as the price of gas continues to rise. Thus, it is possible
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 142 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
that the industry increases its reliance on coal-fired stations, leaving the generating capacity with
little redundancy. In such a scenario, the integrity of transmission lines, particularly those directly
connected to coal-fired stations, will be vital to ensuring the continuity of supply given that there will
be little reserve generating capacity remaining. Powerline inspection will then become even more
important than it currently is.
4.4.8.3 Drivers
Cost
Given that monitoring requirements are a fixed cost for electricity companies, they have a particular
incentive to keep maintenance costs to a minimum, as this will have a direct effect on their margins.
As an example, for the UK it would cost approximately €450m for airborne monitoring costs for a
year and this includes any one-off capital expenditure in terms of replacing aircraft. A suitable
helicopter such as a Bell 407 would cost upwards of €1.1m.
At present these costs have a significant impact in such a low margin business as electricity
transmission. There is also little scope in terms of technology or new methods that would reduce
costs in the near term. However, a successful UAV solution does promise to be able to significantly
reduce the cost of powerline monitoring.
Safety
Operating at very close proximity to powerlines is very hazardous. Firstly, the aircraft has to be
able to cope with sudden gusts of wind that could blow the aircraft onto the line. Secondly,
intersections of lines mean that pilots have to concentrate hard to avoid flying into lines that bisect
each other.
The safety record of powerline survey in Europe has been reasonably good. However, accidents
have occurred which often have involved fatalities. Even if these are rare, the insurance costs for
such operations are a drain on overall budgets.
Noise
UAV systems are likely to be far quieter than twin-engine helicopters. This is not a trivial aspect of
powerline monitoring as, due to the sensitivities of both human beings and livestock, low-level,
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 143 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
aerial powerline monitoring is restricted in terms of hours so as not to disturb people living near the
line of flight. In the UK this means that the available flight time is between 9 AM and 4.00 PM and
such restrictions exist in other countries in Europe.
Endurance
Although there are 7 hours available for a helicopter to fly in, most helicopter pilots are restricted to
just 5 hours of flight in order to prevent fatigue which means a manned helicopter can only cover
approximately 130 -150Km a day or 6,000 low-voltage poles. A UAV system operating at the same
rate but for seven hours could therefore cover between 180 – 200Km or 8,400 poles by eliminating
the problem of pilot and observer fatigue.
4.4.8.4 Restraints
Technology
Ideally, a UAV system for powerline management would have the capability to perform routine
visual surveillance and also IR monitoring of pylons. In order to perform this mission safely and
with a degree of autonomy it would need to navigate its flight particularly in relation to the wires
itself. This will require a ’sense and avoid’ system, possibly a laser range finder or acoustic sensor,
to ensure a safe range of operation. The UAV is also likely to require considerable stability in order
to withstand and adjust to any sudden gusts of wind. The damage caused by contact with the line
would incur a considerable cost to repair. Finally, the UAV system must be large enough to able to
carry the weight of the sensors, whether a digital camera or IR camera.
These requirements present considerable design and manufacturing obstacles to the goal of
supplying a system at the right price. However, given the fact that a helicopter costs in the region
of €1m, that still puts most small UAV VTOL systems that currently exist within this price bracket.
Information Management
One of the reasons a visual observer instead of a camera is used for the majority of powerline
monitoring missions is due to the fact that electricity companies have problems analyzing the vast
amounts of data collected. Even an observer’s report takes a long time to be analysed, given that
an observer looks at approximately one pole every three seconds.
Powerline observation by a UAV system would inherently rely on image-based output, essentially
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 144 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
unfiltered. Handing over such data in a raw form would likely not be an acceptable practice for
most electricity transmission companies. Therefore, operators and manufacturers of UAV systems
for powerline monitoring need to develop a system by which the raw data can be filtered into
actionable information, either through on-board processing or processing at the ground station.
Even with this facility, time and therefore cost of processing imagery must be factored into the
overall budget.
4.4.8.5 Market Forecast The amount of electricity line to be monitored across Europe will remain broadly static over the next
decade. This means that the market for powerline surveillance will also remain largely consistent.
Frost and Sullivan believes the market for powerline monitoring will be worth €1.04bn. If this
market was to continue to be served by helicopters, the market for powerline air platform equipment
would be worth €341m over the next decade. According to Frost and Sullivan analysis, if the entire
market for powerline air platform equipment were to be captured by UAVs, given the lower price of
a VTOL UAV system suitable for the task, the market would be worth approximately €133m over
the next ten years. It has assumed however, given the challenges for the industry that need to be
overcome in that time, that UAV use will build to capture a substantial share of the market by 2015.
Frost and Sullivan therefore estimates the market of UAV powerline monitoring to be worth €59m
between 2006 and 2015.
0
2
4
6
8
10
12
14
16
2006 2007 2008 2009 2010 2011 2012 2013 2014 2015
Euro
s m
illio
ns
FIGURE 4-10THE TOTAL MARKET FOR POWERLINE MAINTENANCE UAVS IN EUROPE, 2006-2015
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 145 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
5 CIVIL UNMANNED VEHICLE – BUSINESS CASE EXAMPLES The recent success in military UAVs are also affecting the civilian market since manufacturers and
potential customers are gearing up for their introduction into the market place. However, the driver
for civil UAV induction into the market is foremost a need for a service, which the civil UAV can
provide cost effectively. This is obviously followed by the good business driver often termed
“affordability”. The affordability value for the customer requiring remote sensing is usually driven by
pixel size or pixel rate or rate of delivery/cost. A customer will normally use this to compare
between vendors of a similar service in order to determine which service to purchase.
Similarly, a customer requiring a communication relay station will weigh the alternative solutions
based on the cost of present solutions offered compared to those of future civil UAV solutions and
the cost of switching over to the alternative.
The approach adopted in order to introduce civil UAVs, is multi-layered – see Figure 5-1. These
layers are interconnected, since the business model will be based on viable applications and a
sound technological base that will provide the confidence needed in the civil UAV market. The
experience gained in the different technological arenas will make it possible to leverage this
knowledge and apply it to a low cost reliable application through the development of new emerging
technologies, in the short term. Technological breakthroughs will follow to meet the challenges in
the mid to far term.
It is important to perform an in depth study of clusters of applications/UAVs, with UAVs having the same "characteristics", to be analysed by experts groups. This will allow the possibility to further improve cost effectiveness through the clustering of applications
FIGURE 5-1 APPROACH TO CIVIL UAV INDUCTION
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 146 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
5.1 ASSUMPTIONS USED
The business case will be based on the customer target price, which will drive the manufacturers’
target cost125.
The assumption made is that civil UAVs are available, providing the following technological
challenges are overcome126:
Collision avoidance systems
Efficient propulsion systems
Very light weight composite structure
Advanced morphing aerodynamic structures
Advanced prognostic and diagnostic systems
High error tolerant systems with related high reliability
Fault recovery systems
Note: These technologies are not only civil UAV specific, but are dual technology issues worth addressing.
TABLE 5-1 CIVIL UAV REMOTE SENSING TECHNOLOGIES - BENEFITS AND DRAWBACKS
Technology Advantages Disadvantages Ground based surveillance
Foot patrol On hand to check condition of easement127, pipeline markers, their condition, and any activity near the pipeline. Can possibly equip patrols to have emergency repair equipment on hand. Foot patrols can deal in a limited manner with any small emergencies.
Terrain may hamper efficiency. Patrols are not frequent, in some cases more than 7 days elapsed before a revisit with an operation of 125 days of cleaning128. Need to carry sensing equipment along pipeline. Human resource intensive, which means where salaries are high the cost is equivalently high. Dull work for the foot patrol personnel. Dangerous if there is a gas leak or other contamination related to the transported material in the pipeline. Can be trapped in a forest fire with no overview as to the best direction to leave the endangered area.
125 See Ref. [ 56] 126 These are the main drivers for the civil UAV roadmap 127 A legal agreement to allow access for the purpose of construction and maintenance of a pipeline 128 See Ref. [ 80]
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 147 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Technology Advantages Disadvantages Acoustic detection of impacts
Continuous monitoring. Localised installation of sensors. Can be used in conjunction with cathodic protection systems.
Detects rather than prevents damage. Has to be tuned to the particular pipeline due to background noise. Has to be sensitive enough to detect transient signal. Sensor spacing is an issue that may cause pricing problems. Limited to pipeline monitoring.
Cathodic protection monitoring129
Continuous monitoring possible. Long distances can be covered using this technique. Could be used in conjunction with acoustic protection systems.
Detects rather than prevents damage. Sensors are attached to the pipeline outside wall. Has to be sensitive enough to detect transient signal. Requires a physical break in pipeline coating for detection. Requires a minimum of breaks in pipeline coating to overcome false alarm rates. Not efficient with older pipelines. Needs a constant source of electrical power. Limited to pipeline monitoring.
Distributed Optical Fibre with optical time domain reflectometry
Miles of pipelines can be monitored from a given location. Continuous monitoring possible. Follows the pipeline contours. Very sensitive. Can distinguish individual events at different points along the optical fibre.
Continuous fibre must be installed along the pipeline. Methods to distinguish different hazards yet to be developed. Limited to pipeline monitoring.
Distributed Optical Fibre with interferometric detection
Continuous monitoring possible. Follows pipeline contours. Very sensitive.
Continuous fibre must be installed along the pipeline. Methods to distinguish different hazards yet to be developed. Cannot detect simultaneous events. Limited to pipeline monitoring.
Pressure sensors on the pipeline
Shows pressure drop across a specific length of pipeline.
May not pick up small leaks. Need for multiple sensors. A different pipeline transportation type requires adaptation of pressure systems. Limited to pipeline monitoring.
129 A system to eliminate corrosion at places of exposed bare metal pipe surface by forcing an electric current to flow through the
conductive soil towards that surface
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 148 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Technology Advantages Disadvantages Mechanised patrols with a variety of sensors
Similar to the foot patrol Covers greater area than foot patrols. Can carry more equipment and supplies than the foot patrol.
Similar to foot patrol.
Pipeline strain monitoring130
Indicates land movement. Can aid in pipeline life calculations.
Multiple sensors required. Complex calibration required. Ambient effects may increase false alarms. Limited to pipeline monitoring.
Geotechnical monitoring131
Monitors land movements Localised measurement
Does not indicate actual pipeline condition. Does not sense the overall picture Need for entries into a database to receive an overall picture
Intelligent pigs132 Can be used to clean the pipeline internals. Can be used to monitor the pipeline internal condition. Can be used to map actual pipeline position due to land movement.
Need to insert and extract the pigs, causing flow delays, though shorter than other inspections. Can only be used in certain sections of pipeline. Cost intensive. Limited to pipeline monitoring.
Ground based visual surveillance
Can use COTS cameras and equipment
May be limited by field of view and may miss boring encroachment. A system is required in order to minimise the human resources for monitoring. Additional cameras for panning and zooming may needed to overcome blind spots.
GPS system and computerised pipeline maps
No equipment need be installed on pipeline
Requires equipment on each piece of construction equipment. Requires equipment operators to maintain the equipment. Requires full collaboration between equipment operators and pipeline operators. Limited to pipeline related operations.
130 Of the pipeline itself – both by continuous and pointwise systems 131 Measures the rock/soil displacement around the pipeline 132 A device inserted into the pipeline and carried along by the flow of the material being transported for various reasons, particularly
cleaning or inspection
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 149 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Technology Advantages Disadvantages Flying-the-line No equipment on the ground to
maintain. Once the observers get used to the terrain the false alarm rate decreases.
Visual inspection usually used with associated limitations. Where specialised remote sensing payloads used cost is a dominant factor. Flight limited to weather conditions. Cannot detect small leaks in pipelines. Requires good visibility, though may improve if payloads are fitted to the leased aircraft with the incurred costs involved – both time and money. Any remote sensing added increases the cost and time to install the equipment. Limited flying platforms available for remote sensing installations.
Satellite monitoring visible wavelengths
No instrumentation and equipment to install on ground. Uses commercial satellites. Possible replacement for weekly flying-the-line possible.
Requires sunlight. Affected by clouds. Development to identify movement near narrow pipelines still required. Need for image processing to extract data. Infrequent pass over required location. Repositioning to emergency position not possible. Data is relatively expensive. Technologies used are relatively old. Data is not necessarily provided in real-time
Satellite monitoring several wavelengths
Can detect encroachment through cloud. Can detect encroachment by night.
Requires more than one satellite. Development to identify movement near narrow pipelines still required. Need for image processing to extract data. Frequency of pass over required location infrequent. Repositioning to emergency position not possible. Data is relatively expensive. Technologies used are relatively old. Data is not necessarily provided in real-time
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 150 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Technology Advantages Disadvantages
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 151 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
Civil UAVs Flexible Can carry required multifunctional payloads suitable for the particular situation. Thermography LIDAR ILIDAR SAR ISAR Hyper-spectral sensors Microwave radiometry Optical sensors
Combination of different remote sensing techniques offers superiority over single techniques. Can monitor pipeline leaks using combination of sensors – thermal, hyper-spectral etc. Station-keep where necessary and at required altitude. Can be brought to required position whenever necessary. High repeatability accuracies. Ideal for D3 applications, where flying the line becomes dull and possibly dirty and dangerous. Image processing is part of the payload package with no extra processing required to obtain required information. Multiple simultaneous applications can be carried out. Cost effective when using multiple applications. Users can minimise their costs through sharing. Example:
Town councils may use Civil UAVs for urban construction monitoring at the same time as the pipeline operators monitor their pipelines – with unique information sent to the two different users simultaneously).
Real time data constantly available. Latest remote sensing technologies used. In emergencies can be rerouted to required position.
Requires market education – since it is a new technological solution. Possible psychological barriers.
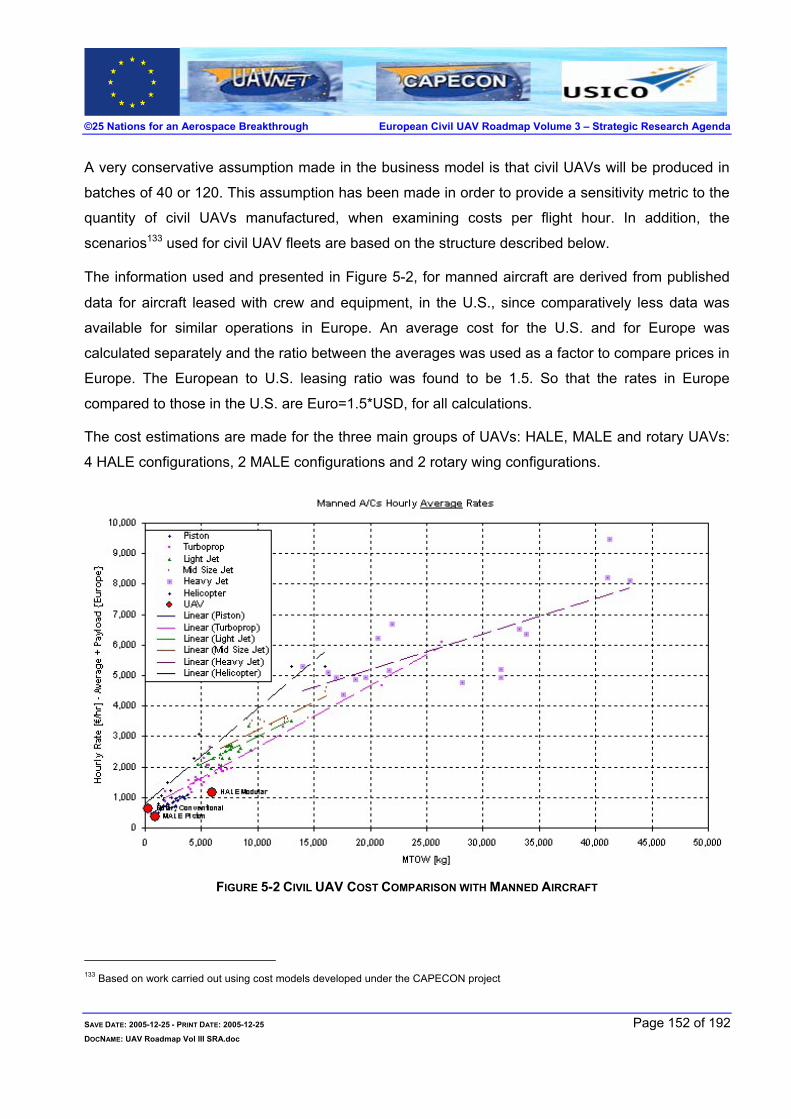
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
A very conservative assumption made in the business model is that civil UAVs will be produced in
batches of 40 or 120. This assumption has been made in order to provide a sensitivity metric to the
quantity of civil UAVs manufactured, when examining costs per flight hour. In addition, the
scenarios133 used for civil UAV fleets are based on the structure described below.
The information used and presented in Figure 5-2, for manned aircraft are derived from published
data for aircraft leased with crew and equipment, in the U.S., since comparatively less data was
available for similar operations in Europe. An average cost for the U.S. and for Europe was
calculated separately and the ratio between the averages was used as a factor to compare prices in
Europe. The European to U.S. leasing ratio was found to be 1.5. So that the rates in Europe
compared to those in the U.S. are Euro=1.5*USD, for all calculations.
The cost estimations are made for the three main groups of UAVs: HALE, MALE and rotary UAVs:
4 HALE configurations, 2 MALE configurations and 2 rotary wing configurations.
FIGURE 5-2 CIVIL UAV COST COMPARISON WITH MANNED AIRCRAFT
133 Based on work carried out using cost models developed under the CAPECON project
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 152 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
For each group, assumptions are made regarding:
1. The system structure 2. The quantity of UAVs produced 3. The number of system flight hours per year
1. The assumptions, for the system set up, are functions of the following:
The number of UAVs per system
The number of simultaneously flying UAVs
The number of UAVs being prepared for flight (turn-around)
The number of UAVs grounded or in stand-by
2. The assumptions, for the quantity of UAVs produced, are functions of the following:
The number of potential customers
The number of systems per customer
3. The assumptions, for the number of system flight hours per year, are functions of the following:
The number of simultaneously flying UAVs (defined previously)
The number of flight hours per mission per UAV
The number of yearly months of operation
Some assumptions are made as a range of values. The quantity of UAVs produced is defined by a
minimum and a maximum value. The number of system flight hours per year range is defined by a
minimum, a typical and a maximum value. It results in six cases for each of the eight configurations,
a total of 48 cases. The summary of the configurations and operational use is summarised in Figure
5-2 above. A detailed description of the assumptions is given in the next paragraphs.
Within these groups, a relative cost comparison, based on the same assumptions, is estimated.
This is in order to give two main perspectives: cost as a function of payload and cost as a function
of flight hour, for every configuration.
Note: It must be noted that the civil UAVs used in the business cases do not necessarily have to perform a unique role. The civil UAV may carry out multiple roles at the same time, which will lower the overall costs involved. However, for the business cases the roles will be unique to that specified in the business case considered.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 153 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
5.2 BUSINESS CASE 1 - EMERGENCIES - FOREST FIRE
Forest fires have increased tremendously in Europe and the rest of the world. They have caused
many casualties among forest fire fighters and civilians and serious damage to the natural
environment. The object is to minimise the area burnt with the minimum resources.
Preliminary figures134 for 2005 already show 19 people killed in some 70,000 forest fires that have
burned an estimated 140,000 hectares. This is significant damage and only covers the period
ending in July 2005.
Russian forestry scientists said they were bracing themselves for this year's fire season, which
starts in late June. It was reported135 that in the year 2004, 22 million hectares - about half the size
of France - were lost to fire.
The costs of extinguishing the fires and that of the damage involved may be broken down into direct
costs and indirect costs. The direct costs involve resources used to extinguish the fire, whereas the
indirect costs include incidental damage such as wildlife losses, natural heritage losses, and
ecosystem damage.
The direct costs include:
Forest monitoring
Fire fighting team
Fire management team
Fire extinguishing systems
Fire monitoring systems
Area of forest burnt
Post fire damage clearance
Re-planting of forest saplings
The indirect costs include:
Remedial clean up of all the forest area and disposal of debris
Severe damage to forest
Tree loss
Long term ecosystem unbalance
Preparing the ground for replanting
Replanting suitable trees
Currently fire monitoring is achieved via two extremes: satellite and cameras mounted on ground
pylons. These not only give two very different costs, but also provide different reaction times and
area coverage. The satellite is very expensive and the picture refresh rate determines the nominal
spread of the fire prior to fire fighting team reactions. The camera mounted pylons monitor smoke
prior to sending an alert. Here the smoke intensity and the sensitivity of the monitoring cameras, on
134 See ref. [ 90] 135 http://www.fire.uni-freiburg.de/media/2005/news_20050601_ru.htm
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 154 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
the pylons, determine the nominal spread of the fire prior to fire fighting team reactions. Nighttime
may be a problem.
In addition there are problems associated with approaching the fire source(s), and precious time
may be lost if the fire fighting team takes an erroneous path in the forest. The time lost in
reorienting the team and bringing the resource to bear will cost an increase in burnt forest coupled
with an increase in burning area to deal with. In addition, the fire may cover such a large area that
reconnaissance requires touring around the entire affected area and the commander of fire-fighting
operations is too close to the fire. The preverbal saying, “He cannot see the forest for the trees”, will
hold true!
The effect of time on fire spread is illustrated in Figure 5-3. Here one can readily appreciate the
importance of information as a function of time136.
The assumptions made are:
The forest is infinite - because of the eventual connection between housing estates and forests.
There are no changes in meteorological conditions - to simplify the comparisons.
The forest is homogenous – in order to be able to estimate timber lost.
COTS systems will be used wherever possible.
Pylon height is above highest tree level.
Civil UAVs are available and their costs are based on the work in Refs. [ 91, 92, 93]
136 See Ref. [ 83]
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 155 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
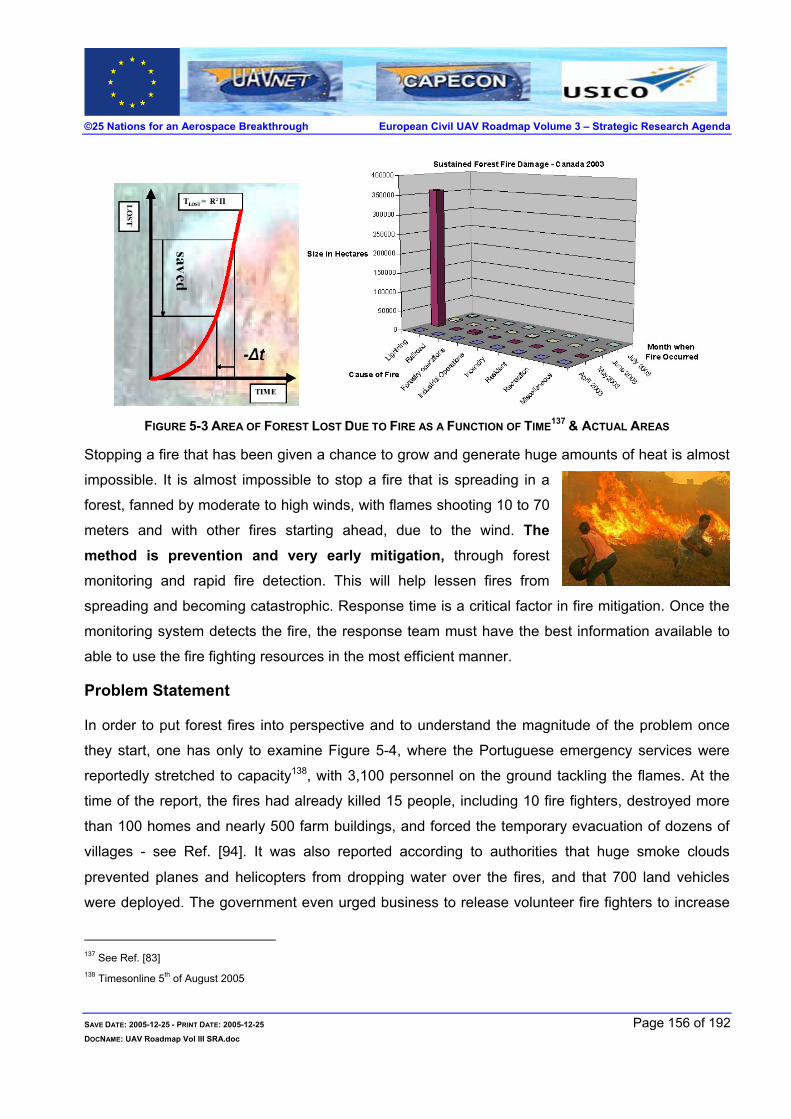
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
FIGURE 5-3 AREA OF FOREST LOST DUE TO FIRE AS A FUNCTION OF TIME137 & ACTUAL AREAS
Stopping a fire that has been given a chance to grow and generate huge amounts of heat is almost
impossible. It is almost impossible to stop a fire that is spreading in a
forest, fanned by moderate to high winds, with flames shooting 10 to 70
meters and with other fires starting ahead, due to the wind. The
method is prevention and very early mitigation, through forest
monitoring and rapid fire detection. This will help lessen fires from
spreading and becoming catastrophic. Response time is a critical factor in fire mitigation. Once the
monitoring system detects the fire, the response team must have the best information available to
able to use the fire fighting resources in the most efficient manner.
Problem Statement
In order to put forest fires into perspective and to understand the magnitude of the problem once
they start, one has only to examine Figure 5-4, where the Portuguese emergency services were
reportedly stretched to capacity138, with 3,100 personnel on the ground tackling the flames. At the
time of the report, the fires had already killed 15 people, including 10 fire fighters, destroyed more
than 100 homes and nearly 500 farm buildings, and forced the temporary evacuation of dozens of
villages - see Ref. [ 94]. It was also reported according to authorities that huge smoke clouds
prevented planes and helicopters from dropping water over the fires, and that 700 land vehicles
were deployed. The government even urged business to release volunteer fire fighters to increase
137 See Ref. [ 83] 138 Timesonline 5th of August 2005
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 156 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
the efforts to extinguish the flames.
Note: This forest fire represented less than 3 percent of Portugal’s forests. The forest fire in Portugal was 180 000 hectares, see Figure 5-4 for scale of fire marked in red –source see Ref. [ 94].
FIGURE 5-4 FOREST FIRE IN PORTUGAL SUMMER 2005 - 180 000 HECTARES - SEE REF. [ 95]
Pylon-mounted cameras
The system comprises cameras mounted on top of pylons 50-70 meters high that relay the camera
pictures back to a central control room. These pictures are manually monitored continuously for
smoke plumes rising above the treetops.
Performance parameters
The coverage attained is presented assuming the following:
The frequencies required to safely send data to the monitoring station
are available.
The pylon system can be linearly increased without problem.
Detection range = 7000 meters
Sweep rate = 2 degree per second
Field Of View (FOV) = 25 degrees
The range for a pylon-mounted camera is assumed to be 7 kilometres, where it can still detect
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 157 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
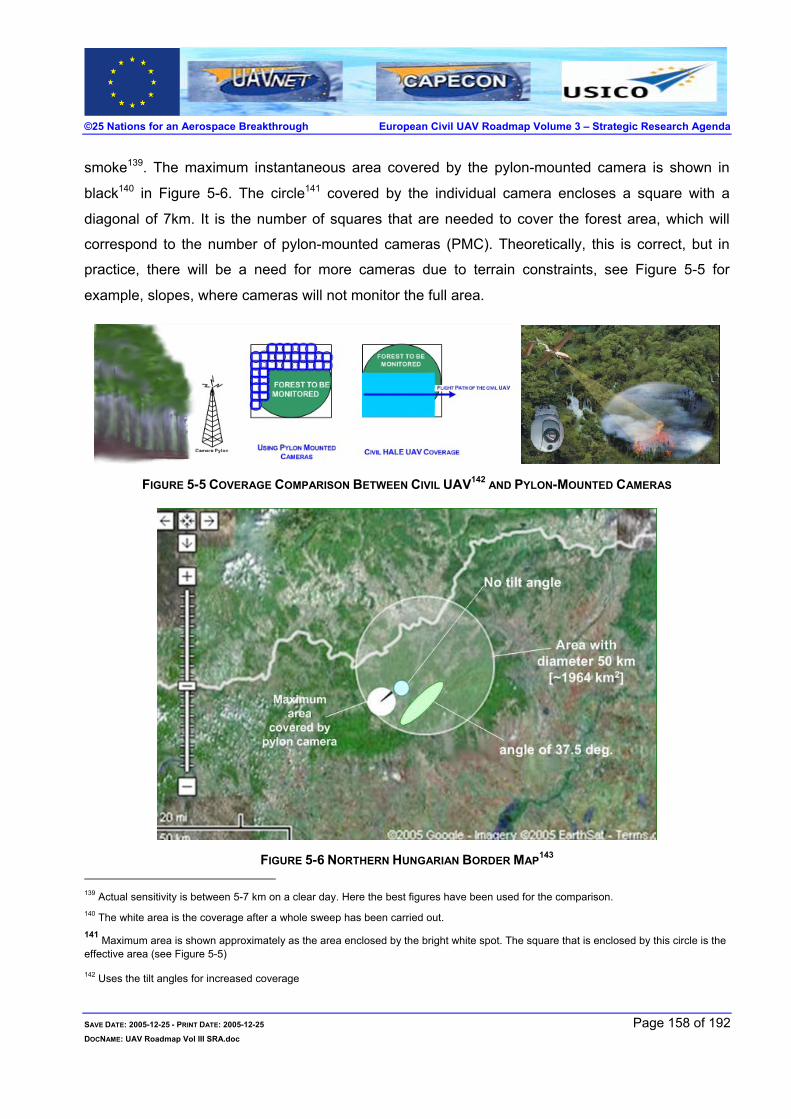
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
smoke139. The maximum instantaneous area covered by the pylon-mounted camera is shown in
black140 in Figure 5-6. The circle141 covered by the individual camera encloses a square with a
diagonal of 7km. It is the number of squares that are needed to cover the forest area, which will
correspond to the number of pylon-mounted cameras (PMC). Theoretically, this is correct, but in
practice, there will be a need for more cameras due to terrain constraints, see Figure 5-5 for
example, slopes, where cameras will not monitor the full area.
FIGURE 5-5 COVERAGE COMPARISON BETWEEN CIVIL UAV142 AND PYLON-MOUNTED CAMERAS
FIGURE 5-6 NORTHERN HUNGARIAN BORDER MAP143 139 Actual sensitivity is between 5-7 km on a clear day. Here the best figures have been used for the comparison. 140 The white area is the coverage after a whole sweep has been carried out. 141 Maximum area is shown approximately as the area enclosed by the bright white spot. The square that is enclosed by this circle is the effective area (see Figure 5-5) 142 Uses the tilt angles for increased coverage
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 158 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Civil UAV system
The civil UAV has the ability to carry multiple payloads simultaneously offering inherently better
performance in forest monitoring. The payloads include: daylight television, thermal imaging and
other remote sensors such as LIDAR and SAR systems. These sensing systems when correlated
give superior coverage of the forest and with fewer false alarms compared to the manually
monitored pylon-mounted camera system, described above.
It is however, important to perform an in depth study as to which civil UAV or combinations of civil UAVs will fulfil the economic role. The civil UAV offers many benefits through the altitude, and coverage, in addition to its multi-function application capabilities.
Furthermore, once a fire does break out, the equipment that is in the
forest is lost and has to be replaced together with the tree saplings.
The civil UAV is not damaged due to fires and does not have to be
replaced.
The problem with using manned aircraft to monitor forest fires is that they can fly only during the day. Flying over a forest fire is very dangerous, especially at night, and the U.S. Forest Service has lost several aircraft during such operations. Due to the flexibility the civil
UAVs offer, a thorough studyinto their use in forest firemonitoring and clusteringwith other applicationsshould be undertaken.
TABLE 5-2 PYLON MOUNTED VS. CIVIL UAV FIRE MONITORING SYSTEMS
Pylon mounted camera Civil UAV
The system is COTS. High area coverage.
Power supplied by wind, solar energy for batteries. Requires a more sophisticated logistics footprint144 than the
pylon-mounted system.
Calculations using pylons always assume that the forest is
on a flat plane - to simplify the constraints on the fire
fighting team and the camera based pylons. This is far
from true in reality.
Civil UAVs fly above the forests.
Modular system that can be expanded as needed. Modular system that can be expanded as needed.
At the critical time, no data available should the pylon
catch fire.
Equipment lost when there is a fire.
Data always available even during fire.
143 Used to provide a sense of coverage comparisons, between pylon mounted camera and COTS airborne payloads – courtesy Google
Maps. 144 It is defined as the size of the logistics support needed to sustain the service offered. The footprint includes all the necessary support
needed to maintain the force such as fuels, parts, support equipment, transportation, and people.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 159 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Pylon mounted camera Civil UAV
Manual monitoring leads to high false alarm rates. Highly flexible can provide automatic alarm when required
at low false alarm rates.
Threshold is adjusted automatically as a function of ambient
conditions.
Limited area coverage per camera.
Static and no-flexible system, once deployed – not easily
moved.
Highly flexible, can be repositioned to enhance
effectiveness whenever required.
During a fire, the required data is not available due to
smoke.
Immediate help to the fire fighting commander and the fire
fighting team. Provides safe and effective approach routes
to the fire.
Need for extra resources to produce overall picture. Data is processed and the whole picture is available to the
fire fighters.
Need for frequency allocation for pylon-mounted cameras
as the number increases - both for Data link and control
links.
Frequencies are allotted similarly to aircraft.
Weather dependant when fog, mist or dust is present. Full coverage 24/7/365
Effectiveness can be affected by wildlife. Can carry out other tasks at the same time.
The civil UAV does not have to be dedicated to forest fire monitoring. This civil UAV may be
collecting data for weather statistics or taking stock of tree condition, when the fire breaks out.
Having this remote sensor in-situ will provide the forestry authorities immediate real-time data,
allowing optimum use of resources to extinguish the fire.
In addition, forest fires release a mixture of gases that are detrimental to the environment. Apart
from carbon monoxide and carbon dioxide, nitric oxides methane, and non-methane hydrocarbons
are released.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 160 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
5.3 BUSINESS CASE 2 - COMMUNICATION RELAYS
The mobile communications market is predicted to grow145 with a shift to high altitude platforms
providing the relay stations146.
Today’s base station sites in the Seattle, Washington area, are rented at approximately $1500 per
month $36million per year – a recurring expense. There were initially 1000 sites in 1998 while
that number grew to approximately 2000 sites by the year 2003 at a non-recurring cost of $1B to
$2B.
≈
The costs stated are those, which civil UAV communications relays must compete with in order to
penetrate this market, with 24 hours a day, 7 days a week and 365 days a year service147 reliability.
The number of HAPs required to cover an area the size of the United Kingdom is illustrated in
Figure 5-7, with a reduced number of terrestrial base stations and related antennas.
A detailed investigation to establish the cost savings that the HAPs will offer should be undertaken,
in order to establish the optimum communications system configuration.
145 See Ref. [ 57] 146 Today these stations are referred to as base stations, since they are terrestrial. 147 Sometimes referred to as 24/7/365
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 161 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
FIGURE 5-7 COVERAGE OF THE UK WITH A NETWORK OF HAPS148
5.4 BUSINESS CASE 3 – PIPELINE MONITORING
The global demand for pipeline monitoring will increase as more pipelines are laid. In Western
countries, it is the most efficient method of transporting liquids and gases. The market potential for
pipeline monitoring is thought to be sustainable with a continuously increasing demand for
monitoring solutions149, due to farming and land development.
As urban areas expand, pipelines that were once in relatively remote places are becoming
vulnerable to building construction and the reasons for pipeline monitoring are that the pipeline
operators are interested in keeping their pipelines in good repair to guarantee delivery of the
pipeline’s goods, and avoid potential damage with the related pollution and other hazards.
In order to penetrate the pipeline monitoring markets a cost of less than 4 €/km should be
attained150.
148 See Ref. [ 98] 149 See Ref. [ 73] 150 Dr. Dieter Hausamann, DLR, Germany
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 162 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Results of an in depth study on pipeline monitoring from an Earth Observation perspective
concluded the following:
The technological drivers are151:
Risk of danger to men and environment due to carried goods
General conditions concerning climate and landscape
Extent of gas production activities
Age of the pipelines
Frequency of observation
Short update cycles and high positional accuracy
Customers wish to purchase the complete observation service – not raw-data material
Customer interface compatibility for delivered information
Geographic extent of demanded data (observation corridor)
Complete acquisition of all possible dangers for the pipeline
False alarms and irrelevant information should be minimized
The economic drivers are:
Economic risk (cost of repair, fulfilling of delivery contracts)
Frequency of construction (without previously requesting information)
Current costs of pipeline monitoring
Wages and general R&D-level
Availability, market price and implementation costs of new pipeline monitoring technologies
Economic prosperity and growth
Overall size of the pipeline network
Density and growth of population
Flexibility in quantity and coverage of the delivered data
Demand-oriented Pricing (price per km²)
Continuous data provision
Long term security (risk of complete loss)
Existence of service pooling gas consumption
Pipeline monitoring focuses on three main issues:
1. Third party interference – biggest single cause of pipeline incidents worldwide 2. Leakage detection – due to pipeline age or damage 3. Soil movement – and other natural phenomena causing stress on pipe walls
Estimated costs, involved in foot patrols only, are estimated to be € 20-70 million/year in Europe.
Note: The outcome of the PRESENSE152 project showed a necessity for:
1. Better satellite resolution both for SAR and optical remote sensing
2. Increased number of satellites in order to provide the required coverage.
151 Source – Dr. Dieter Hausamann, DLR, Germany 152 See Ref. [ 75]
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 163 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
3. Satellite borne LIDAR
4. Lower cost imagery available on call
5. Reduction in false alarm rates
FIGURE 5-8 RELATIVE COST FOR PIPELINE MONITORING - REMOTE SENSING153
153 See Ref. [ 60]
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 164 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
5.5 SOUND TECHNOLOGICAL BASE
Current alternatives are:
Metric Current methods Intended future method using Satellite Earth Observation
Proposed method using civil UAVs
Soil movement Foot patrol is tedious and time
consuming. In addition,
relatively expensive in
countries with high salaries.
Seismic activities not
observable.
Needs LIDAR type remote
sensing systems for accurate
observations
Accurate measurements using
the latest technologies in multi-
spectral and LIDAR remote
sensing systems.
Selective
monitoring or
“flying-the-line”
Corridor of ~ 200m either side
of the pipeline is monitored for
soil contamination due to
pipeline leaks.
No raw data available, only a finished report provided by the contractor. New contractors tend to increase the false alarm rate due to inexperience.
Manned helicopters using
human eye visual inspections.
Subterranean leakages not
observed.
Flown 1-2 / month
Full area monitoring –necessitates extraction of required data from the satellite remote sensors. In addition, there may be limitations related to satellite orbit pass in both time and coverage.
Flies the required flight path
providing real-time imagery using
multi-type remote sensors.
Full scope of monitoring
achievable:
Subterranean leakage using multi-spectral or hyper-spectral remote sensing provides pinpoint accuracy.
May be a multi-use platform giving other remote sensing simultaneously to other customers – reducing the pipeline operator costs
Frequency of
observation
Frequency of observation is
inherently very low.
Depends on satellite orbit type Flexible - as required by the
customer.
Data
processing
Each pipeline operator extracts
data using different tooling,
methods and techniques.
Four154 business models may be offered:
• Pipeline operators creating the service in-house
• Cooperation of the pipeline operators to create the service
• Provision of the service from an external service provider
• Launch of the service by service providers
Civil UAV data processing can be
carried out either onboard or at
the data application station
154 This is based on Ref. [ 73]
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 165 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
6 EUROPEAN OPPORTUNITIES AND CONSEQUENCES This section summarises the benefits Europe will gain, should the European Commission adopt the
civil UAV roadmap and the consequences that Europe may incur by ignoring this opportunity.
TABLE 6-1 OPPORTUNITIES AND THREATS – FOCUSED ON DIRECT EFFECTS155
Area Most Affected
Opportunities
(Europe adopts the Civil UAV Roadmap)
Consequences
(Europe Does NOT adopt the Civil UAV Roadmap)
Comments
Socio-
Political
Full European autonomy - Europe is
completely independent and does
not have to “tow-the-line”.
Independent decision-making
process with no outside influences.
Europe may have to follow
outside directives on civil
UAV uses.
Europe may be constrained by
the technologies it acquired to
use the foreign non-European
civil UAVs
Non-European produced
civil UAV systems and
technologies
Dependency on non-European
manufacturers and other non-
European government policies
Technological
infrastructure
Completely European produced civil
UAV system, instead of a
“component and parts” manufacturer
Buy civil UAV technologies
from non-European
manufacturers
Adaptation to suit European
needs will increase their costs
Socio-
economic
Pan-European research will form
strong Know-who, Know-what
networks - further consolidation of
Pan-European relations
Weaken European research
and knowledge in this area
Impetus to further unite and
strengthen the European
Union
Economic-
Technological
infrastructure
Increase in European high-tech
growth
Europe indirectly subsidises
non-European high-tech
Other unidentified secondary
“knock-on” indirect effects,
may cause increased damage
to Europe
Socio-
economic
Increase in innovation Brain Drain Europe’s bright scientists will
leave Europe
Socio-
economic
Development of a highly skilled
workforce
Lack of a skilled workforce
will backfire in future years
Future corrective action to
increase the skill base may
cost “too much”
155 This table does not take into account the effects of the lack of the civil UAV system operation and the benefits obtained through these
operations
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 166 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Area Most Affected
Opportunities
(Europe adopts the Civil UAV Roadmap)
Consequences
(Europe Does NOT adopt the Civil UAV Roadmap)
Comments
Economic-
Technological
infrastructure
High-tech infrastructure strengthened
in Europe
Non-European high-tech
infrastructure strengthened
Technological breakthroughs
with the economic implications
are non-European
Socio-
economic
Europe can compete with its own
product in the civil UAV market
Europe is a bystander in the
civil UAV market
Loss of potential market to
non-European producers
Economic-
Technological
infrastructure
European home-grown present,
next-generation and post next-
generation technologies
Europe lacks the relevant
technologies
Civil UAVs are inevitable, so
why not develop them in
Europe.
A large technological gap is
produced – may be difficult to
close
Socio-
economic
European systems more acceptable
in Europe
Non-European systems may
cause social negative
response
A non-European civil UAV
may cause rejection by
European citizens – there is
an inherent underlying
psychological factor in
introducing civil UAVs
Socio-
economic &
Technological
infrastructure
European spin-offs created Spin-offs are non-European Further increasing future
competition: employment,
technological infrastructure,
and skilled workforce…
Socio-
economic &
Technological
infrastructure
Further development of Pan-
European decision making
Europe stays the same with
no progress on the civil UAV
field and the associated
collaboration
Collaboration in the civil UAV
field remains fragmented
Technological
infrastructure
Infrastructure laid by the four FP5
civil UAV projects (USICO,
CAPECON, UAVNET, HELIPLAT)
used as an impetus for further
breakthroughs
Investment in the FP5
project withers away and is
lost
Information dissipates and
there is nothing to show for the
work carried out and the
investments made
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 167 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Area Most Affected
Opportunities
(Europe adopts the Civil UAV Roadmap)
Consequences
(Europe Does NOT adopt the Civil UAV Roadmap)
Comments
Technological
infrastructure
Multi-disciplinary technologies cause
dual-use technological flows
Stagnation Dual-use technologies
absorbed by other research
areas and benefit is
widespread
Socio-
economic &
Technological
infrastructure
Pan-European capabilities
harnessed and moved forward
Sporadic tries some more
successful than others, with
little Pan-European
cooperation, islands of
knowledge.
Duplication of effort,
repetition of errors, loss of
momentum, allowing
stronger overseas
competition to move in
By uniting Europe on the civil
UAV programme the
European potential will be
maximal, strengthening
Europe’s competitiveness
internally and externally
Socio-
economic &
Technological
infrastructure
Major supplier of civil UAV
equipment
Equipment has to be bought
in from non-European
sources
Conditions are dictated in non-
European capitals
Socio-
economic &
Technological
infrastructure
Europe leads the civil UAV industry
with related advantages in this high
growth market
Europe follows the leader
trying to close the
technological gap
This may augment the brain
drain Europe wants to avert
Socio-
economic &
Technological
infrastructure
European service industries related
to civil UAVs together with their
relative supply chains UAVs expand
substantially
European civil UAV supply
chains barely exist
Europe may miss out on a
new technological service
industry, with all the related
peripherals
Socio-
economic
infrastructure
European aerospace employment is
directly boosted, increasing its
attractiveness for younger
generations
Europe has to combat
possible rise in
unemployment in the
aerospace industry
The European workforce is
boosted and the aerospace
industry is an attractive
workplace
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 168 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
6.1 EUROPEAN OPPORTUNITIES
The civil UAV roadmap will initialise and directly promote numerous small business opportunities in
various fields, in addition to the supply chains that will naturally emerge.
A very short list of possible technological spin-offs is summarised in Table 6-2.
TABLE 6-2 EXPECTED SPIN-OFF OPPORTUNITIES
Research Area of Interest
Sub-Area of Interest Sub-Area of Interest Sub-Area of Interest
Firmware Image processing Sensors, algorithms
Software systems
Hardware
Optics Improvements in laser
measuring technologies
New laser technologies
for LIDAR and ILIDAR Software
Higher quality GIS Mapping Local Councils, Builders,
Architects
Firmware
Electronics, antennas Radar – improved
aviation radar systems Sensors, algorithms
Software
Coding theories
Electronics, antennas
Firmware
Software
Signal Processing
Secure Communications Algorithms
Electro magnetic radiation
MEMs Micro-electronics Firmware, mechanical
engineering
Electronic system
miniaturisation Wafer Engineering
New FAB manufacturing
techniques
Nanotechnologies Electronics Specialised lithography,
Chemical engineering
Electronics
Novel actuators Wing warping
technologies
Micro-actuators using nano-
technologies
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 169 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Research Area of Interest
Sub-Area of Interest Sub-Area of Interest Sub-Area of Interest
Novel controllers
Miniaturisation of robust
avionics
Highly reliable redundant
miniaturised electronic systems
Novel manufacturing
systems
Electronics, mechanics,
software, algorithms
Novel mechanical
systems for cargo
loading and unloading
Computerised
mechanical systems Algorithms, actuators
Robotics
Autonomy Algorithms for different
applications
Improved software
implementation methods
Advanced programming
languages
Validation and
automatic testing
Automatic test equipment,
Sophisticated data acquisition
systems
System tools
Software, Firmware
Simulations Modelling and algorithm
development
Payload maintenance Specialised
maintenance services Sensor maintenance
Fuselage, powerplant,
actuators, etc
Civil UAV maintenance
companies Classic maintenance
services Electronics, ground control
station, application station, etc
Finance for civil UAV
systems Leasing companies
specializing in civil UAVs Resale of used civil
UAV systems
Software Systems Engineering
(SMEs) System integrators
Hardware
Civil UAV operators
Service Industries
Refurbishing services
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 170 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Research Area of Interest
Sub-Area of Interest Sub-Area of Interest Sub-Area of Interest
Hardware
Miniaturisation Nano-electronics
Flight control
Software Advanced generation-after-
next embedded algorithms
Hardware
Miniaturisation Nano-electronics
Avionics
Sensor technologies
Software
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 171 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
7 GLOSSARY OF TERMS A/C Aircraft
AAV Autonomous Air Vehicle
ACARS Airborne Communications Addressing and Reporting System
ACAS Airborne Collision Avoidance System
ADC Air Data Computer
ADS-B Automatic Dependent Surveillance Broadcast
ANSP or ANSPs Air Navigation Service Providers
ARESE ARM Enhanced Shortwave Experiment
ARM Atmospheric radiation measurement program
ASAS Airborne Separation Assistance System
ATC Air Traffic Control, synonym for Air Traffic Management, or system
ATM Air Traffic Management, synonym for Air Traffic Control, or system
ATS Air Traffic System, synonym for Air Traffic Control or management. Sometimes
referred to as Air Traffic Service
Availability Is a measure of how often a system or component is in the operable and
committable state when the mission is called for at an unknown (random) time. It is
measured in terms of the percentage of time a system can be expected to be in
place and working when required. In this document it describes how a given
aircraft type is able to perform its task compared to the number of times it is
required to do so. For this study, the ratio of hours flown to hours scheduled is
used. It is expressed as a percentage.
sScheduledFlightHoursFlownFlightHourtyAvailabili =
BLOS Beyond Line of Sight
Canopy The upper leaves of the trees in a forest
CARE Co-operative Actions of R&D in EUROCONTROL
CDTI Cockpit Display of Traffic Information
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 172 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Communication The data link between the aircraft and the ground
CONOPS Concept of Operations
COTS Commercial of the shelf
DARPA Defence Advanced Research Projects Agency
DEM Digital Elevation Model
DHS Department of Homeland Security
DoD U.S. Department of Defence
EASA European Air Safety Agency
EMR Electromagnetic radiation
EOMD Earth Observation Market Development
ESARR EuroControl Safety Regulations Requirements
FAA Federal Aviation Administration
Flight Control Includes all systems contributing to the aircraft stability and control, such as
avionics, air data system, servo-actuators, control surfaces/servos, on-board
software, navigation, and other related subsystems. Aerodynamic factors are also
included in this grouping.
FLIR Forward Looking Infra Red
FMS Flight Management System
GA General aviation
GCS Ground Control Station
GEO Geostationary Earth orbit
GIS Geographic Information System
Global Interoperability The aircraft manufacturers recognize that today's system will not meet tomorrow's
needs, that the system must change, and that they need to work together closely
to ensure that future systems in Europe, Asia and the United States all fit together
seamlessly for maximum operational efficiency and a safe, secure, efficient,
environmentally friendly, global air traffic system that addresses the needs of all
users and service providers.
GMES Global Monitoring of Environment and Security
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 173 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
GMOSS Global Monitoring of Safety and Security – a European sponsored project that
includes pipeline monitoring
GNSS Global Navigation Satellite System
GPS Global Positioning System
HALE High Altitude Long Endurance
HAP High Altitude Platform
HFC Hydro-Fluoro-Carbon
HMI Human Machine Interface
Human Factors / Ground Control
Accounts for all failures resulting from human error and maintenance problems
with any non-vehicle hardware or software on the ground.
ICAO International Civil Aviation Organisation
IFR Instrument Flight Rules
INSAR Interferometry Synthetic Aperture Radar
LAAS Local Area Augmentation System – used as a navigation aid
LAI Lean Aerospace Initiative
LEO Low Earth orbit
Logistics footprint Defined as the size of the logistics support needed. The footprint includes all the
necessary support needed to maintain the force such as fuels, parts, support
equipment, transportation, and people.
LTA Lighter Than Air
Maintainability Is the ability of a system to be retained in or restored to a specified condition when
maintenance is performed by personnel having specified skill levels, using
prescribed procedures and resources, and doing so at prescribed levels of
maintenance and repair. It is measured in terms of how long it takes to repair or
service the system, or Mean Time To Repair (MTTR) in hours.
MALE Medium Altitude Long endurance
MEMS Micro Electro Mechanical System
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 174 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Miscellaneous Any application failures not attributable to those previously noted, including
airspace issues, operating problems, and other non-technical factors. Because
operating environments are not uniform as a variable affecting the data, weather is
excluded as a causal factor in this portion of the study.
MMI Man Machine Interface, used interchangeably with HMI
MTBF Mean Time Between Failure - describes how long a repairable system or
component will perform before failure. This is also known as Mean Time Between
Critical Failure (MTBCF). For non-repairable systems or components, this value is
termed Mean Time To Failure (MTTF). Here it is essentially the ratio of hours flown
to the number of maintenance-related cancellations and aborts encountered. It is
expressed in hours.
eFailureRatMTBF 1
=
NIST National Institute of Standards and Technology
PEO Polar Earth Orbit
PIPEMON Geo-information services for pipeline operators – a European funded project
PMC Pylon-Mounted Cameras
Power/Propulsion (P&P)
Encompasses the engine, fuel supply, transmission, propeller, electrical system,
generators, and other related subsystems on board the aircraft
PRESENSE Pipeline REmote SENsing for Safety and the Environment – a European funded
project
PS The PS technique overcomes the main limits of conventional interferometric
approaches to surface deformation detection, thus allowing to identification of
individual radar benchmarks (called Permanent Scatterers) where very precise
displacement measurements can be carried out.
PSD Permanent Scatterers Data
RVSM Reduced Vertical Separation Minima
SAA Sense And Avoid system
SAR Search and Rescue / Synthetic Aperture Radar
SLAM Service for Landslide Monitoring, funded by the European Space Agency (ESA)
SWOT Strengths-Weaknesses-Opportunities-Threats
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 175 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Task Reliability Is defined as 100 minus the percentage of times a task is cancelled before take-off
or aborted in-flight due to maintenance issues. It is expressed as a percentage.
TCAS Traffic Collision Avoidance System
TIS-B Traffic Information Service Broadcast
TPI Third Party Interference
UAV or UAVs Unmanned air vehicle(s)
VFR Visual Flight Rules
WAAS Wide Area Augmentation System – used as a navigation aid
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 176 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
8 REFERENCES 1. ISTECS Journal - Unmanned Aerial Vehicle Technologies for Civil
Applications: Potentials, Constraints, and Challenges.
Hendarko, Institute of Flight System, German Aerospace
Center (DLR), Lilienthalplatz 7, 38108 Braunschweig,
Germany,Department of Aeronautics and Astronautics,
Institute of Technology Bandung (ITB), Jl. Ganesha 10,
Bandung, Indonesia, 55-64 Vol. V (Special Issue) / 2004 -
ISSN 1345-8981
2. UK Civil Aviation Authority - Aircraft Airworthiness Certification Standards For Civil
UAVs, D.R.Haddon, C.J.Whittaker, August 2002,
http://www.caa.co.uk/docs/393/srg_acp_00016-01-
120203.pdf
3. UK Civil Aviation Authority - Unmanned Aerial Vehicle Operations in UK Airspace –
Guidance, CAP 722, www.caa.co.uk/docs/33/
CAP722.PDF
4. IABG Final Report - CARE Innovative Action Preliminary Study on Integration
of Unmanned Aerial Vehicles into Future Air Traffic
Management, Version 1.1, 7th December 2001,
Industrieanlagen-Betriebsgesellschaft mbH Dept. Airborne
Air Defence, Einsteinstr. 20, D-85521, Ottobrunn
5. UAV Task Force Final Report - A Concept For European Regulations For Civil Unmanned
Aerial Vehicles (UAVs), JAA and Eurocontrol, 11 May
2004
6. Airworthiness Code - Applicable to UAV Systems, UAV Systems Airworthiness
Requirements (USAR) - Draft proposal version 2.0 -
01/07/2004, Centre d’essais en vol – Base d’essais
d’Istres, France
7. Volume 1- Overview - 25 Nations for an Aerospace Breakthrough, European Civil
Unmanned Air Vehicle Roadmap, p.15
8. Aerospace Journal - Editorial, AIAA, January 2005, Vol. 43, No. 1
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 177 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
9. The MITRE Corporation - Issues Concerning Integration of Unmanned Aerial
Vehicles in Civil Airspace, Matthew T. DeGarmo,
November 2004, Centre for Advanced Aviation System
Development, McLean, Virginia
10. Recommendation 728 - The future of the European defence aeronautics industry,
DOCUMENT A/1823, 4 June 2003, FORTY-NINTH
SESSION, prepared by Mr Yaסez Barnuevo, Rapporteur,
Assembly of Western European Union, The
Interparliamentary European Security and Defence
Assembly, 43, avenue du President Wilson, 75775 Paris
Cedex 16, Tel. +33(0)1.53.67.22.00 – Fax:
+33(0)1.53.67.22.01, E-mail: [email protected], Internet:
http://assembly.weu.int
11. Defence - Office of the Secretary of Defense, Airspace
Integration Plan for Unmanned Aviation, Michael W.
Wynne, November 2004, U.S.
12. Uninhabited Air Vehicles - Enabling Science for Military Systems, Committee on
Materials, Structures, and Aeronautics for Advanced
Uninhabited Air Vehicles, National Materials Advisory
Board, Aeronautics and Space Engineering Board,
Commission on Engineering and Technical Systems,
National Research Council, Publication NMAB-495,
National Academy Press, Washington, D.C.
13. Berman et al. (1998) - Berman E., Bound J., Machin S. (1998), “Implication of
Skill-Based Technological Change: International
Evidence”, Quarterly Journal of Economics, November
14. Going For Growth - Europe On The Move, Directorate General Press and
Communication, The Economy of the EU, September
2003.
15. “Brain Gain – the Instruments” - Conclusions and recommendations of the EU Conference,
The Hague, 29-30 September 2004
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 178 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
16. The key to Europe's future - - Communication From The Commission, Science and
technology, the key to Europe's future - Guidelines for
future European Union policy to support research.
Brussels, 16.6.2004COM(2004) 353
17. EU Commission’s proposal - Commission’s proposal to develop a strategic roadmap for
Europe in the field of Research Infrastructures for the next
10 to 20 years,1-3 July 2004
18. AIR TRAFFIC ALLIANCE - “Air and Ground ATM Systems Integration Need or
Fashion …”, 4th Integrated CNS Conference NASA Glenn
Research Centre, April 26 – 30, 2004, Jean-Claude
Richard, Executive Director Industrial Partnerships of the
Air Traffic Alliance
19. ICNS Conference - Unmanned Aerial Vehicle (UAV) Cargo System, For
Integrated Communications Navigation and Surveillance
(ICNS) Conference, April 2004, Team Members: Kevin
(Kook-In) Han, Miguel M del Campo, Libni Ortiz, Indah
Leo, Chnur Muhammad, Angela Garcia, Faculty Advisor:
Dr. George L. Donohue Professional Sponsor: Dr. Herman
Rediess, Federal Aviation Administration (FAA)
20. AeroVations Associates - Priorities for Canadian UAV Research & Technology
Development, A Limited Survey of Stakeholders, Report
No. AVA 04-02, February 2004, National Research
Council Canada, contract No. 514325, 5 September 2003.
21. RRDPAE-2002 - "Civilian and military Unmanned Aerial Vehicles - Overview
of European and American efforts and Challenges for the
future”, Proceedings Of The Fifth International Seminar On
RRDPAE-2002, ISSN 1648-7788 Aviation, Vol VII, No 1,
2003, “Recent Research and Design Progress in
Aeronautical Engineering and its Influence on Education”,
Vilnius – Lithuania, , Prof. Z. Goraj, Warsaw University of
Technology, pp.3-15.
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 179 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
22. EU Commission Proposal - A Sustainable Europe for a Better World: A European
Union Strategy for Sustainable Development
(Commission's proposal to the Gothenburg European
Council), Brussels, 15.5.2001
23. COLOGNE 1999 - COLOGNE European Council Conclusion EU-Summit,
Cologne, Germany, 1999
24. BARCELONA 2002 - BARCELONA European Council Conclusions EU-Summit,
Barcelona, Spain, 2002
25. UAV Task Force Final Report - The Joint JAA/Eurocontrol Initiative on UAVs
[http://www.jaa.nl/news/UAV Task Force Core Report.pdf]
26. Defence - Office of the Secretary of Defence, Airspace Integration
Plan for Unmanned Aviation, November 2004
27. Defence - Aerospace Daily & Defense Report, Access Five Plan
Moves Forward Despite Funding Questions By Jefferson
Morris and Rich Tuttle August 5, 2003
28. International Robot Exhibition - Biennial 2003 International Robot Exhibition, Tokyo, Japan
29. The Sensor - Enterprise for Innovative Geospatial Solutions, May 2004.
WWW.eigs.olemiss.edu/sensor/2004/sensor-04-05-01.htm
30. NHK TOKYO - Experimental airship is tested: 21-05-2004, Broadcast on
SBS TV in Japanese Mon to Sat 5:25 - 6:00am,
http://www.nhk.or.jp/englishtop
31. HAPS-Full-ICTP2004 - Mobile telecommunications via stratosphere, By Prof. Dr.
Ryszard (Richard) Struzak ([email protected]) is Co-
Director of school series on radio at the International
Centre for Theoretical Physics (ICTP).
32. Presentation - The Challenges of Safely Introducing Unmanned Aircraft
Systems (UAS) into the NAS, AFS-430 Phil Potter, Steven
Swartz and Marcello Mirabelli AFS-820 Mr. Glenn Rizner,
May-Aug 2004
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 180 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
33. Police Aviation News - Issue 105, January 2005, p.18,
www.policeaviationnews.com
34. Shepard Group - 13th October 2004. http://www.shephard.co.uk Source
(AP)
35. Presentation - “Ummmm... So Where Does the Pilot Sit? “, by G.F
Marsters, FCASI, the W. Rupert Turnbull Lecture
presented at the 50th Annual General Meeting of the
Canadian Aeronautics And Space Institute at Montreal, 28
April 2003
36. NASA - CRYSTAL-FACE is a measurement campaign
designed to investigate tropical cirrus cloud physical
properties and formation processes.
http://cloud1.arc.nasa.gov/crystalface/
37. Lessons Learned - NASA UAV Science Demonstration Program Missions,
Steven S. Wegener, Program Manager, NASA Ames
Research Center, Moffett Field, California, Susan M.
Schoenung, Project Engineer, Longitude 122 West, Inc.,
Menlo Park, California – later presented in a paper
38. Precision Agriculture - Precision Agriculture As A Commercial Application For
Solar-Powered Unmanned Aerial Vehicles, AIAA 2002-
3404, Stanley R. Herwitz, Clark University, Worcester, MA,
Lee F. Johnson, California State University, Monterey Bay,
Seaside, CA, John C. Arvesen, Kauai Airborne Sciences,
Kauai, HI, Robert G. Higgins, Joseph G. Leung and
Stephen E. Dunagan, NASA Ames Research Center,
Moffett Field, CA Also: Herwitz, S.R., Johnson,
L.F., Arvesen, J.C., Leung, J.G., Dunagan, S.E., 2002.
“Precision Agriculture as a Commercial Application for
Solar-powered UAVs, 1st AIAA UAV Conference”, 15-17
May, Portsmouth, VA
39. South Korea UAV Roadmap - http://www.smart-uav.re.kr/sudc_eng/index.htm
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 181 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
40. UAV TASK-FORCE - UAV TASK-FORCE Final Report, The Joint
JAA/Eurocontrol Initiative on UAVs, A Concept for
European Regulations For Civil Unmanned Aerial Vehicles
(UAVs), 11 May 2004
41. Enclosures - To UAV Task Force Final Report
42. Radiation Protection Dosimetry - Airborne Gamma Ray Measurements in the Chernobyl
Plume, R.L. Grasty, J. Hovgaard and J. Multala,
http://rpd.oupjournals.org/cgi/content/abstract/73/1-4/225,
Radiation Protection Dosimetry 73:225-230 (1997)
43. Modelling Links - Modelling Links in Inclined LEO Satellite Networks,
PETER GVOZDJAK, Motorola Canada Ltd., JOSEPH G.
PETERS, Simon Fraser University, Canada,
Www.cs.sfu.ca/~peters/pub/satellite2.pdf
44. SP-1199 - Published June 1996. Developed by ESA-ESRIN ID/D,
http://www.esa.int/esapub/sp/sp1199/spappA.htm
45. UAV Cargo System - Unmanned Aerial Vehicle Cargo System - Campo, Libni
Ortiz, Indah Leo, Chnur Muhammad, Angela Garcia. http://spacecom.grc.nasa.gov/icnsconf/docs/2004/02_session_a1
46. Utilisation of UAVs - Utilisation of Unmanned Aerospace Vehicles for Global
Climate Change Research – Scripps Institute of
Oceanography, San Diego, California – August 3 & 4,
2004, http://www.fsl.noaa.gov/uav_workshop
47. Earth Observation Magazine - Application of Aerial Video for Traffic Flow Monitoring and
Management - Vol. 12, No. 4 June 2003, Pitu Mirchandani,
Mark Hickman, Alejandro Angel, and Dinesh Chandnani
http://www.eomonline.com/Common/Archives/2003jun/03j
un_aerialvideo.html
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 182 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
48. UAVNET - Monitoring Of Gas Transmission Pipelines – A Customer
Driven Civil UAV Application, Dieter Hausamann (DLR, D-
82234 Webling, Germany), Werner Zirnig (Ruhrgas AG,
Halterner Strabe 125, D-46284 Dorsten, Germany), and
Gunter Schreier, Definiens Imaging GmbH,
Trappentreustrasse 1-3, D-80339 Munich, also appeared
in the UAVNET presentations on pipeline monitoring.
49. AIAA - International communications Satellite Conference, 9 –
12 May 2004, Monterrey, California, To Reduce or to
Extend a Complex Engineering System Design Lifetime?
What is at Stake, for Whom, and How to Resolve the
Dilemma, J. H. Saleh, J. P. Torres-Padilla, D. E. Hastings,
D. J. Newman, Massachusetts Institute of Technology,
Cambridge, Massachusetts 02139
50. TAMDAR - TAMDAR Sensor Development, Daniels, T. S.,
“Tropospheric Airborne Meteorological Data Reporting
(TAMDAR) Sensor Development,” 2002-02-153, SAE
General Aviation Technology Conference and Exposition,
April 16-18, 2002, Wichita, KS.
51. Traffic Surveillance from UAVs - Results and Lessons from an Extended Field Experiment,
Benjamin Coifmana, Mark R. McCord, Rabi Mishalani,
Keith Redmill, The Ohio State University, Ohio
Transportation Engineering Conference, Columbus, OH,
October 27, 2004
52. Global Interoperability - Prerequisite for future growth in air transport, Air Traffic
Alliance - A Grouping Of Eads-Airbus-Thales (ATA),
Boeing, Maastricht, February 1, 2005,
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 183 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
53. Future Applications of UAVs - Inputs to JAA/Eurocontrol Task Force, JAA, Hoofddorp,
2003-05-08, Dr. Reimund Kuke, Airobotics Germany, NLR
Netherlands, DLR, Germany, IAI, Israel, Swedish Defence
College, Sweden, University of Naples, Italy, Onera,
France, EADS, France, Swedish Space Corporation,
Sweden.
54. Science and technology - Communication From The Commission, COM (2004) 353
final, Science and technology, the key to Europe's future -
Guidelines for future European, Union policy to support
research, Brussels, 16.6.2004
55. IEEE Communications Society - Broadband Communications via High-Altitude Platforms: A
Survey, Stylianos Karapantazis and Fotini-Niovi Pavlidou
Aristotle University of Thessaloniki
56. UAVNET - Civil UAVs An Approach Towards Cost Reduction, Robert
Delogne, Sonaca s.a., UAVNET meeting # 4, Rochester,
July 2002
57. Presentation - Airborne Communication Node – Market Analysis, Market
and business case study of utilisation of UAVs as airborne
communications antenna, Laurence “Nuke” Newcome -
Adroit Systems U.S.A., meeting # 4, Rochester, July 2002
58. UAVNET - The Use of Remote Sensing Technologies for Pipeline
Operations, Andy Fraser, Issquared Ltd. UK, now
Advantica.
59. Pipeline & Gas Journal - Hyperspectral Remote Sensing Promotes Early Problem
Detection In Facility & Pipeline Monitoring, Dr. Alexander
W. Taylor, Pipeline & Gas Journal/October 2000,
www.undergroundinfo.com
60. UAVNET - Where is Business - Remote Sensing Opportunities
for Civil UAVs, Wouter Brokx, NLR, 3rd UAVNET meeting,
29/30 April 2002, Warsaw
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 184 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
61. Presentation - Earth Observations for Disaster Reduction: Developing a
National Plan, Helen M. Wood, GEO Secretariat Director,
Chair, U.S. Subcommittee on Disaster Reduction,
Helen.Wood@NOAA .gov, October 2004
62. ARESE - NASA, ARM Enhanced Shortwave Experiment
(ARESE), September 25 - November 1, 1995,
http://www.arm.gov/iops/arese/ARESE.html
63. Underwater Volcano - Researchers Discover Underwater Volcano, Unique
hydrothermal community of hundreds of eels, uncovered, Jessica Demian or Mario Aguilera
858/534-3624, http://earthref.org/ERESE/projects/ALIA,
http://scrippsnews.ucsd.edu/article_detail.cfm?article_num
=681
64. Fact Sheet 091-99 - Real-Time Monitoring of Active Landslides, Mark E. Reid,
Richard G. LaHusen, William L. Ellis,
http://landslides.usgs.gov, U.S. Department of the Interior,
U.S. Geological Survey U.S. Geological Survey Fact Sheet
091-99, Reducing Landslide Hazards in the United States
65. SLAM - OPTICAL IMAGES WITHIN LANDSLIDE RISK
ANALYSIS, P. Farina, S. Moretti - Earth Sciences Dept.,
University of Firenze, V. La Pira 4, Firenze, Italy, E-mail:
[email protected], D. Colombo, A. Fumagalli - Tele-
Rilevamento Europa, TRE s.r.l., a POLIMI spin-off
company, V. Vittoria Colonna 7, Milano, Italy, E-mail:
[email protected], E. Gontier - Spacebel,
Parc Scientifique du Sart Tilman, Angleur (Liטge),
Belgium, E-mail: [email protected],
http://www.slamservice.info/img
66. Earth Observation System - Strategic Plan For The U.S. Integrated Earth Observation
System, Interagency Working Group on Earth
Observations NSTC Committee on Environment and
Natural Resources
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 185 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
67. Cellular Antennas Go Airborne - Testing is currently being performed by California firm
Aero-Vironment Inc., the UAV with a 50-foot wing span
and powered by liquid hydrogen can fly 12 miles high
(65,000 feet, above commercial air traffic and weather) for
one week straight - Thursday July 7, 2005
http://www.mobilemag.com/content/100/102/C4233/
68. Small UAV Application - Proceedings, Int’l Symposium on Remote Sensing of
Environment, 2003, Collection of Ultra High Spatial and
Spectral Resolution Image Data over California Vineyards
with a Small UAV, L.F. Johnsona, S. Herwitza, S
Dunagana, B. Lobitza, D. Sullivana, R. Slyea
69. In The Pipeline – SATELLITES WILL CHECK GAS TRANSMISSION
INFRASTRUCTURE FROM SPACE, Russ Pride, project
manager, Advantica, Munich, 4th January 2002, European
Commission PRESENSE - Definiens Imaging GmbH,
leading supplier of object oriented Image Analysis
Technologies
70. UAVNET - CAPECON Overview Description - Meeting #4, Rochester,
England 23-24 July 2002, http://www.uavnet.com
71. UAVNET - European Security Framework - Frost & Sullivan, UAVNET
meeting, Amsterdam, 26 -27 January 2004
72. UAVNET - Meeting 6 –7 May 2004, London, UK, UAVs-Meeting the
Civil/Commercial Challenge, Sara Waddington Editorial
Director, Council, Unmanned Aerial Vehicles Systems
Association (UAVS), UK www.uavworld.com
73. Pipeline Monitoring - Threat Management Systems - Short-term actions on EO
market drivers Identification of market drivers and their
impact on demand and supply of EO based geo-
information in respect of pipeline monitoring, C-CORE,
DEFINIENS, DLR, MICUS, RUHRGAS,
TERREMAPSERVER, AO/1-4240/02/I-LG
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 186 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
74. Design Project - Design an automated airway system for a UAV cargo
concept. Federal Aviation Administration Office of Aviation
Research, 800 Independence Ave. Washington DC.
Sponsor: FAA Office of Aviation Research, Dr. Herm
Rediess, Team Advisor, supported by Mr. Francisco
Estrada, FAA NEXTOR Program Manager
([email protected]); Dr. Lance Sherry, Aurora
Flight Sciences Corp.
75. ISRSE05 - Test Cases and Prospects of Pipeline Management Using
Space Borne Earth Observation G. Schreiera, D.
Hausamann, I. Lingenfelder, U. Benz, W. Zirnig, ISRSE05
Pipeline Final document.
76. DOT Analysis - Analysis of DOT Office of Pipeline Safety (OPS) Natural
Gas Pipeline Operators Incident, Summary Statistics for
01/01/86 –06/21/1999. The statistics are available from
OPS’s website, http://ops.dot.gov/
77. NTSB/PAR-95/01 - National Transportation Safety Board Pipeline Accident
Report for Texas Eastern Transmission, Corporation
Natural Gas Pipeline Explosion and Fire, Edison, New
Jersey, March 23, 1994. PB95-916501.
78. UAVNET - Kiruna Conference, Programme for the First European
Conference on the Applied Scientific Use of UAV Systems,
Real time Radiological Disaster Control, Dr. Hovav Zafrir,
Dr. Gideon Steinitz, Meeting in June 2002, Kiruna,
Sweden.
79. UAVNET - Kiruna Conference, Prototype Radiation Surveillance
Equipment For A Mid-Sized Unmanned Aerial Vehicle, P.
Smolander, K. Kurvinen, R. Pöllänen, STUK - Radiation
and Nuclear Safety Authority, P.O. Box 14, FIN-00881
HELSINKI, Finland
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 187 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
80. CONCAWE - Oil Pipelines Management Group’s Special Task Force,
Performance of European Cross-Country Oil Pipelines
Statistical Summary of Reported Spillages – 2001, P.M.
Davis, K.P. Giessler, B. Muller, A. Olcese,
81. CONCAWE - Oil Pipelines Management Group’s Special Task Force,
Performance of European Cross-Country Oil Pipelines
Statistical Summary of Reported Spillages – 2003, P.M.
Davis, K.P. Giessler, A. Olcese, F. Uhlig, Brussels, May
2005
82. UAVNET - Presentation of the use of remote sensing technologies for
pipeline operations, Description of potential market for
monitoring of pipelines around the world which could be
serviced by UAVs, Andy Fraser, Integrated Statistical
Solutions (ISS) U.K., now part of Advantica Ltd. Rochester
Conference, England 23-24 July 2002
83. UAVNET - Robot Reconnaissance Aircraft - An Opportunity To Use
Robot Technology For Fighting Forest Fires Ltc. Ágoston
Restás, Szendrö Fire Department, Hungary, 9th UAVNET
Meeting, Amsterdam 26 - 27. January
84. UAVNET - Mapping Requirements for Flood Control, Koen Maeghe,
AWZ, 9th UAVNET Meeting, Amsterdam 26 - 27. January
85. Aviation Week - Here's How To Motivate Students Toward Aerospace,
David M. North / Editor in Chief, Aviation Week & Space
Technology, Originally published in AW&ST October 14,
2004
86. Aviation Week - Worries Deepen Over Dearth of Technical Talent By
William B. Scott, Colorado Springs, Originally published in
AW&ST, April 23, 2001
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 188 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc
©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
87. Visual Imaging Techniques - Inspection and Evaluation of Protective Coatings by Visual
Imaging Techniques, Alan D. Zdunek, Gary Shubinsky,
Kwan Hwa Jan, BIRL/Northwestern University, 1801
Maple Avenue, Evanston, IL 60201
88. UAVNET - Lesson learned from UAV supported forest fire
reconnaissance in Hungary, Agoston Restas, Szendro,Fire
Department. Hungary, Zoltan Gacser, National Defence
University of Hungary, Utilization of UAVs for
reconnaissance of forest fires. UAVNET, meeting London.
89. Aviation Today - Steering Clear of a Perfect Storm, By David Jensen,
Editor's Note, December 1, 2004
90. European Commission Report - Forest Fires in Europe 2004, S.P.I.05.147, European
Communities 2005
91. Technical Report - Configuration Cost Estimation Final Technical Report,
D7/4 CAPECON Technical Report, 9.05.2005
92. Technical Report - MALE UAV Synthesis, 54/8 CAPECON Technical Report,
24.10.2004
93. Technical Report - HALE Blended Wing Configuration, D4/8 CAPECON
Technical Report, 26.05.2004
94. Agence France-Presse - Portugal Remains On Alert As Forest Fires Under Control,
http://www.forests.org/articles, Agence France-Presse,
August 27, 2005
95. MODIS - MODIS Rapid Response Team, Image courtesy Jeff
Schmaltz, NASA GSFC and courtesy of
http://earthobservatory.nasa.gov/NaturalHazards
96. UAV Reliability Study - Unmanned Aerial Vehicle Reliability Study - Prepared
for the U.S. Office of the Secretary of Defence on Feb.
2003
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 189 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
97. Uninhabited Air Vehicles - Uninhabited Air Vehicles: Enabling Science for Military
Systems, Committee on Materials, Structures, and
Aeronautics for Advanced Uninhabited Air Vehicles,
National Materials Advisory Board, Aeronautics and Space
Engineering Board, Commission on Engineering and
Technical Systems, National Research Council,
Publication NMAB-495, NATIONAL ACADEMY PRESS,
Washington, D.C.
98. White paper - High-Altitude Platforms for Wireless Communications, by
T. C. Tozer and D. Grace
99. Presentation - Micro-Aerial Vehicle Development: Design components
and Flight Testing, by Gabriel Torres and Thomas J.
Mueller, University of Notre Dame, Notre dame, IN., U.S.,
AUVSI Conference on July 11-13 2000
100. RadarNet - Multifunctional Automotive Radar Network,
http://www.radarnet.org
101. Study - Unmanned Aerial Vehicle Reliability Study, Prepared for
the U.S. Office of the Secretary of Defence on Feb. 2003
102. UAV Roadmap 2002 - Unmanned Aerial Vehicles Roadmap 2002-2027,
developed by the Office of the Secretary of Defence
(Acquisition, Technology, & Logistics), Air Warfare.
103. CAPECON Report - Onboard Obstacle Detection System for Rotary Wing UAV,
Pierre-Marie BASSET, ONERA, Task 6.1, D6-1-b Rotary
Technologies B Report, Rotary Wing UAV Technologies,
September 2003
104. Presentation - Lean Aerospace Initiative, Overview, May 2004, 2004
Massachusetts Institute of Technology - web.mit.edu/lean
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 190 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
Index
George Mason University, 14 ACARE, 32, 33 global interoperability, 27 aerodynamics, 100 GMOSS, 74, 194 air system, 14 ground station, 14, 18 ATC, 15, 18, 22, 33, 35, 42, 85, 87, 96, 97, 98,
192 HALE, 15, 16, 21, 34, 38, 39, 40, 41, 42, 43, 45, 48, 49, 53, 61, 71, 88, 89, 90, 91, 92, 94, 95, 96, 100, 172, 194, 209
ATM, 15, 22, 42, 85, 96, 97, 192, 199 autonomous, 2, 13, 85
HAPs, 43, 44, 46, 48, 182 autonomous flight, 24, 85 Heliplat, 101 border patrol, 26 hydrothermal, 63 brain drain, 32
Brain Drain, 4 inspection, 169 Interface equipment, 14 bridge inspection, 71
CAPECON, 87, 88, 89, 90, 91, 92, 94, 101, 187, 206, 209, 210
ISAR, 171 Landslide, 63 landslips, 77 cargo, 14, 25, 81, 84, 85, 190, 207 law enforcement, 18, 26, 67 civil UAV leakages, 76, 77, 185 UAVs, 3, 4, 13, 14, 18, 20, 21, 24, 26, 27, 28,
29, 31, 32, 33, 34, 36, 37, 38, 40, 42, 44, 47, 48, 55, 57, 58, 60, 61, 63, 65, 67, 71, 74, 79, 80, 81, 82, 83, 85, 87, 88, 89, 94, 95, 97, 167, 174, 180, 181, 182, 186, 187, 188, 189, 190
LIDAR, 61, 65, 66, 74, 171, 180, 184, 185, 189 MALE, 15, 16, 21, 61, 71, 88, 89, 92, 93, 95, 98,
172, 194, 209 marine ecosystem collapse, 66 MEMs, 28, 189
Class A Airspace, 22 micro-rotary, 19 Class B Airspace, 22, 23 morphing, 28, 167 Class C Airspace, 22 NASA, 24, 27, 34, 36, 53, 54, 199, 201, 205, 209 Class D Airspace, 22 payload, 13, 14, 15, 37 Class E Airspace, 22 pipeline, 20, 26, 74, 75, 76, 77, 78, 167, 168, 169,
171, 182, 183, 184, 185, 194, 195, 203, 206, 208
Class G airspace, 23 Co-axial Rotor, 16
PIPEMOD, 74 collision avoidance, 20, 21, 24, 32, 42, 96, 98, 101 platform, 13, 14, 15, 26, 38, 39, 46, 47, 61, 70, 76,
80, 81, 83, 90, 95, 100, 185, 194 Communication stations, 14 communications, 13, 14, 15, 19, 27, 40, 44
pollution detection, 26, 58 control station, 14, 36, 190 powerline, 79 Cost Comparison, 172 Powerline, 73, 79 critical infrastructures, 68, 72 PRESENSE, 74, 184, 195, 206 critical technologies, 21 relay communication equipment, 14 DARPA, 19, 20, 193 reliability, 69 data link, 86
down link, 15 remote sensing, 13, 14, 20, 34, 63, 66, 68, 74, 75, 79, 80, 83, 166, 170, 171, 184, 185 emergency, 13, 18, 26, 70, 72, 79, 82, 97, 167,
170, 177 SAR, 42, 57, 74, 171, 180, 184, 195 satellite, 13, 33, 38, 40, 42, 43, 44, 47, 48, 49, 57,
62, 64, 66, 71, 74, 75, 76, 82, 170, 175, 184, 185
FAA, 14, 24, 84, 85, 199, 207 false alarms, 74, 169, 180 fertiliser, 64
Satellite, 38, 42, 46, 74, 76, 82, 170, 184, 185, 194, 202, 203
fire detection, 177 fire fighters, 20
Seiko Epson Corp, 19, 20 fire monitoring, 20 Single Rotor, 94 fishing, 55, 64, 66, 83 spin-offs, 28, 29, 187, 189 flooding, 81, 82 structural inspections, 71 Forest fires, 175 surveillance, 68, 70, 72, 78, 167, 169 Formula-One racing, 24 Synchronisation, 18 Frost & Sullivan, 5
GDP, 30, 31
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 191 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc

©25 Nations for an Aerospace Breakthrough European Civil UAV Roadmap Volume 3 – Strategic Research Agenda
technologies, 2, 4, 13, 17, 19, 21, 24, 26, 28, 29, 30, 32, 33, 34, 37, 41, 42, 43, 44, 48, 53, 64, 65, 68, 70, 78, 81, 83, 86, 89, 91, 94, 96, 101, 102, 166, 167, 171, 183, 185, 186, 187, 188, 189, 191, 208
telecommunication relays, 26 thermal imagery, 36 Thermography, 171 topological mapping, 26 traffic monitoring, 20, 26 UAV, 2, 4, 5, 13, 14, 15, 16, 17, 18, 19, 20, 24, 25,
26, 28, 32, 34, 35, 36, 37, 39, 42, 44, 45, 48, 65, 66, 81, 83, 84, 85, 87, 88, 89, 90, 91, 92, 93, 94, 95, 96, 97, 98, 101, 102, 166, 167, 179, 180, 186, 190, 197, 199, 200, 201, 202, 203, 206, 207, 209, 210
UAV, 36, 84, 85
UAVNET, 1, 67, 87, 96, 99, 100, 102, 187, 203, 204, 206, 207, 208, 209
UAVs, 2, 4, 5, 13, 14, 15, 16, 17, 19, 20, 21, 24, 25, 26, 27, 28, 30, 32, 33, 34, 35, 36, 37, 38, 39, 40, 42, 43, 48, 49, 52, 53, 54, 55, 56, 57, 58, 59, 60, 61, 62, 63, 64, 65, 66, 67, 68, 69, 70, 71, 72, 73, 74, 75, 76, 77, 79, 80, 81, 82, 83, 84, 85, 87, 88, 89, 93, 94, 95, 96, 98, 99, 100, 166, 167, 171, 173, 174, 176, 180, 185, 186, 187, 188, 190, 197, 200, 201, 202, 203, 204, 206, 208, 209
underground fires, 63, 64 up link, 15 USICO, 26, 87, 95, 96, 97, 98, 101, 187 wine vineyard, 20 wrecks, 70
SAVE DATE: 2005-12-25 - PRINT DATE: 2005-12-25 Page 192 of 192 DOCNAME: UAV Roadmap Vol III SRA.doc


















