Eigenvalues Eigenvectors and Differential Equations
56
Section 5.4 (Systems of Linear Differential Equation); Eigenvalues and Eigenvectors July 1, 2009 2 × 2 Systems of Linear Differential Equations
-
Upload
322399mk7086 -
Category
Documents
-
view
70 -
download
5
description
Advanced Mathematics, Eigenvalues Eigenvectors and Differential Equations
Transcript of Eigenvalues Eigenvectors and Differential Equations
-
Section 5.4 (Systems of Linear DifferentialEquation); Eigenvalues and Eigenvectors
July 1, 2009
2 2 Systems of Linear Differential Equations
-
Todays Session
2 2 Systems of Linear Differential Equations
-
Todays Session
A Summary of This Session:
2 2 Systems of Linear Differential Equations
-
Todays Session
A Summary of This Session:(1) Finding the eigenvalues and eigenvectors of a 2 2 matrix.
2 2 Systems of Linear Differential Equations
-
Todays Session
A Summary of This Session:(1) Finding the eigenvalues and eigenvectors of a 2 2 matrix.(2) 2 2 linear, first-order, systems of differential equations
2 2 Systems of Linear Differential Equations
-
Todays Session
A Summary of This Session:(1) Finding the eigenvalues and eigenvectors of a 2 2 matrix.(2) 2 2 linear, first-order, systems of differential equations(3) Phase-plane method
2 2 Systems of Linear Differential Equations
-
Todays Session
A Summary of This Session:(1) Finding the eigenvalues and eigenvectors of a 2 2 matrix.(2) 2 2 linear, first-order, systems of differential equations(3) Phase-plane method
2 2 Systems of Linear Differential Equations
-
Todays Session
A Summary of This Session:(1) Finding the eigenvalues and eigenvectors of a 2 2 matrix.(2) 2 2 linear, first-order, systems of differential equations(3) Phase-plane method
2 2 Systems of Linear Differential Equations
-
Motivation
We are interested in solving systems of first order differentialequations of the form:
x = f (x , y)
y = g(x , y)
2 2 Systems of Linear Differential Equations
-
Motivation
We are interested in solving systems of first order differentialequations of the form:
x = f (x , y)
y = g(x , y)
or more generally, systems that look like:
x = f (x , y , t)
y = g(x , y , t)
2 2 Systems of Linear Differential Equations
-
Motivation
We are interested in solving systems of first order differentialequations of the form:
x = f (x , y)
y = g(x , y)
or more generally, systems that look like:
x = f (x , y , t)
y = g(x , y , t)
In the first case, f (x , y) and g(x , y) do not depend on t. They arecalled autonomous.
2 2 Systems of Linear Differential Equations
-
Motivation
We are interested in solving systems of first order differentialequations of the form:
x = f (x , y)
y = g(x , y)
or more generally, systems that look like:
x = f (x , y , t)
y = g(x , y , t)
In the first case, f (x , y) and g(x , y) do not depend on t. They arecalled autonomous.In the second case, f (x , y , t) and g(x , y , t)depend on t. They are called non-autonomous.
2 2 Systems of Linear Differential Equations
-
Examples
Which of the following examples is autonomous?
2 2 Systems of Linear Differential Equations
-
Examples
Which of the following examples is autonomous?(a):
2 2 Systems of Linear Differential Equations
-
Examples
Which of the following examples is autonomous?(a):
x = 2x 4x y
y = 2x + 2y2
2 2 Systems of Linear Differential Equations
-
Examples
Which of the following examples is autonomous?(a):
x = 2x 4x y
y = 2x + 2y2
Answer: first-order, autonomous (not linear), 2 2 system of dfqs
2 2 Systems of Linear Differential Equations
-
Examples
Which of the following examples is autonomous?(a):
x = 2x 4x y
y = 2x + 2y2
Answer: first-order, autonomous (not linear), 2 2 system of dfqs(b)
x = 2x + 4y t
y = x 2y + sin t
2 2 Systems of Linear Differential Equations
-
Examples
Which of the following examples is autonomous?(a):
x = 2x 4x y
y = 2x + 2y2
Answer: first-order, autonomous (not linear), 2 2 system of dfqs(b)
x = 2x + 4y t
y = x 2y + sin t
Answer: first-order, non-autonomous (yet linear), 2 2 system ofdfqs
2 2 Systems of Linear Differential Equations
-
Examples
Which of the following examples is autonomous?(a):
x = 2x 4x y
y = 2x + 2y2
Answer: first-order, autonomous (not linear), 2 2 system of dfqs(b)
x = 2x + 4y t
y = x 2y + sin t
Answer: first-order, non-autonomous (yet linear), 2 2 system ofdfqs
We are interested in qualitative as well as quantitativedescriptions of the solutions.
2 2 Systems of Linear Differential Equations
-
Finding eigenvalues and eigenvectors of matrices
To find the eigenvalues (and corresponding eigenvectors) of amatrix A means to find the (scalar) values and corresponding(non-zero) vectors v which satisfy the vector equation
Av = v .
In some sense the eigenvectors define the main directions alongwhich the matrix A acts (as a geometric transform).
2 2 Systems of Linear Differential Equations
-
Finding eigenvalues and eigenvectors of matrices
To find the eigenvalues (and corresponding eigenvectors) of amatrix A means to find the (scalar) values and corresponding(non-zero) vectors v which satisfy the vector equation
Av = v .
In some sense the eigenvectors define the main directions alongwhich the matrix A acts (as a geometric transform).
Example 1: Let A =
(5 21 4
). Find its eigenvalues and
corresponding eigenvectors.
2 2 Systems of Linear Differential Equations
-
Finding eigenvalues and eigenvectors of matrices
To find the eigenvalues (and corresponding eigenvectors) of amatrix A means to find the (scalar) values and corresponding(non-zero) vectors v which satisfy the vector equation
Av = v .
In some sense the eigenvectors define the main directions alongwhich the matrix A acts (as a geometric transform).
Example 1: Let A =
(5 21 4
). Find its eigenvalues and
corresponding eigenvectors.
We let v =
(x
y
).
2 2 Systems of Linear Differential Equations
-
Example,contd
The equationAv = v .
means:
5x + 2y = x
x 4y = y
2 2 Systems of Linear Differential Equations
-
Example,contd
The equationAv = v .
means:
5x + 2y = x
x 4y = y
or
(5 )x + 2y = 0
x + (4 )y = 0
2 2 Systems of Linear Differential Equations
-
Example,contd
The equationAv = v .
means:
5x + 2y = x
x 4y = y
or
(5 )x + 2y = 0
x + (4 )y = 0
This system of equations describes the intersection of two lineswhich go through the origin. In order to have a non-zero solution,the determinant must be zero (this follows from Cramers rule). So (5 ) 2
1 (4 )
= 02 2 Systems of Linear Differential Equations
-
Example,contd
The equationAv = v .
means:
5x + 2y = x
x 4y = y
or
(5 )x + 2y = 0
x + (4 )y = 0
This system of equations describes the intersection of two lineswhich go through the origin. In order to have a non-zero solution,the determinant must be zero (this follows from Cramers rule). So (5 ) 2
1 (4 )
= 02 2 Systems of Linear Differential Equations
-
Example,contd
Therefore(5 ) (4 ) 2 = 0
2 2 Systems of Linear Differential Equations
-
Example,contd
Therefore(5 ) (4 ) 2 = 0
or2 + 9+ 20 2 = 0
2 2 Systems of Linear Differential Equations
-
Example,contd
Therefore(5 ) (4 ) 2 = 0
or2 + 9+ 20 2 = 0
That is2 + 9 + 18 = 0
2 2 Systems of Linear Differential Equations
-
Example,contd
Therefore(5 ) (4 ) 2 = 0
or2 + 9+ 20 2 = 0
That is2 + 9 + 18 = 0
Solving gives: = 3,6.
2 2 Systems of Linear Differential Equations
-
Example,contd
Therefore(5 ) (4 ) 2 = 0
or2 + 9+ 20 2 = 0
That is2 + 9 + 18 = 0
Solving gives: = 3,6.Now we find the eigenvectors.
2 2 Systems of Linear Differential Equations
-
Example,contd
For 1 = 3, the system becomes:
2x + 2y = 0
x y = 0
2 2 Systems of Linear Differential Equations
-
Example,contd
For 1 = 3, the system becomes:
2x + 2y = 0
x y = 0
Both equations lead to: x = y . So we can choose the eigenvector
to be v1 =
(11
).
2 2 Systems of Linear Differential Equations
-
Example,contd
For 1 = 3, the system becomes:
2x + 2y = 0
x y = 0
Both equations lead to: x = y . So we can choose the eigenvector
to be v1 =
(11
).
For 2 = 6, the system becomes:
x + 2y = 0
x + 2y = 0
2 2 Systems of Linear Differential Equations
-
Example,contd
For 1 = 3, the system becomes:
2x + 2y = 0
x y = 0
Both equations lead to: x = y . So we can choose the eigenvector
to be v1 =
(11
).
For 2 = 6, the system becomes:
x + 2y = 0
x + 2y = 0
Both equations lead to: x = 2y . So we can choose the
eigenvector to be v2 =
(21
).
2 2 Systems of Linear Differential Equations
-
Example,contd
For 1 = 3, the system becomes:
2x + 2y = 0
x y = 0
Both equations lead to: x = y . So we can choose the eigenvector
to be v1 =
(11
).
For 2 = 6, the system becomes:
x + 2y = 0
x + 2y = 0
Both equations lead to: x = 2y . So we can choose the
eigenvector to be v2 =
(21
).
2 2 Systems of Linear Differential Equations
-
Using eigenvalues and eigenfunctions to solve linear firstorder systems
This is an alternative method to the annihilator method whichexplains the nature of the solution obtained.
2 2 Systems of Linear Differential Equations
-
Using eigenvalues and eigenfunctions to solve linear firstorder systems
This is an alternative method to the annihilator method whichexplains the nature of the solution obtained.
Example 2: Solve:
x = 5x + 2y
y = x 4y
2 2 Systems of Linear Differential Equations
-
Using eigenvalues and eigenfunctions to solve linear firstorder systems
This is an alternative method to the annihilator method whichexplains the nature of the solution obtained.
Example 2: Solve:
x = 5x + 2y
y = x 4y
Here is how we solve it:
1. Find the matrix A corresponding to this linear sytems and putthe equation in matrix form v = Av .
2 2 Systems of Linear Differential Equations
-
Using eigenvalues and eigenfunctions to solve linear firstorder systems
This is an alternative method to the annihilator method whichexplains the nature of the solution obtained.
Example 2: Solve:
x = 5x + 2y
y = x 4y
Here is how we solve it:
1. Find the matrix A corresponding to this linear sytems and putthe equation in matrix form v = Av .
2. Find the eigenvalues and corresponding eigenvectors of A
2 2 Systems of Linear Differential Equations
-
Using eigenvalues and eigenfunctions to solve linear firstorder systems
This is an alternative method to the annihilator method whichexplains the nature of the solution obtained.
Example 2: Solve:
x = 5x + 2y
y = x 4y
Here is how we solve it:
1. Find the matrix A corresponding to this linear sytems and putthe equation in matrix form v = Av .
2. Find the eigenvalues and corresponding eigenvectors of A
3. The solution vector
v = c1e1tv1 + c2e
2tv2
2 2 Systems of Linear Differential Equations
-
Using eigenvalues and eigenfunctions to solve linear firstorder systems
This is an alternative method to the annihilator method whichexplains the nature of the solution obtained.
Example 2: Solve:
x = 5x + 2y
y = x 4y
Here is how we solve it:
1. Find the matrix A corresponding to this linear sytems and putthe equation in matrix form v = Av .
2. Find the eigenvalues and corresponding eigenvectors of A
3. The solution vector
v = c1e1tv1 + c2e
2tv2
2 2 Systems of Linear Differential Equations
-
Example 2, contd
We already did half of the work in Example 1. From there, we
know A =
(5 21 4
).
2 2 Systems of Linear Differential Equations
-
Example 2, contd
We already did half of the work in Example 1. From there, we
know A =
(5 21 4
).
The eigenvalues and corresponding eigenvectors are: 1 = 3,
v1 =
(11
)
2 2 Systems of Linear Differential Equations
-
Example 2, contd
We already did half of the work in Example 1. From there, we
know A =
(5 21 4
).
The eigenvalues and corresponding eigenvectors are: 1 = 3,
v1 =
(11
)
and 2 = 6,v2 =
(21
).
2 2 Systems of Linear Differential Equations
-
Example 2, contd
We already did half of the work in Example 1. From there, we
know A =
(5 21 4
).
The eigenvalues and corresponding eigenvectors are: 1 = 3,
v1 =
(11
)
and 2 = 6,v2 =
(21
).
Therefore the solution vector is given by:
v = c1e3t
(11
)+ c2e
6t
(21
)
2 2 Systems of Linear Differential Equations
-
Example 2, contd
We already did half of the work in Example 1. From there, we
know A =
(5 21 4
).
The eigenvalues and corresponding eigenvectors are: 1 = 3,
v1 =
(11
)
and 2 = 6,v2 =
(21
).
Therefore the solution vector is given by:
v = c1e3t
(11
)+ c2e
6t
(21
)
This means: x(t) = c1e3t 2c2e
6t and y(t) = c1e3t + c2e
6t .
2 2 Systems of Linear Differential Equations
-
Example 2, contd
Lets graph this using pplane(http://math.rice.edu/dfield/dfpp.html). What do you observe?
2 2 Systems of Linear Differential Equations
-
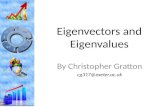
Example 3
Find the eigenvalues and corresponding eigenvectors of the matrix
A =
(3 44 3
)and use them to write down the solution to
x = 3x + 4y
y = 4x + 3y
2 2 Systems of Linear Differential Equations
-
Example 3
Find the eigenvalues and corresponding eigenvectors of the matrix
A =
(3 44 3
)and use them to write down the solution to
x = 3x + 4y
y = 4x + 3y
Make sure to plot the phase plane.
2 2 Systems of Linear Differential Equations
-
Example 3
Find the eigenvalues and corresponding eigenvectors of the matrix
A =
(3 44 3
)and use them to write down the solution to
x = 3x + 4y
y = 4x + 3y
Make sure to plot the phase plane.
2 2 Systems of Linear Differential Equations
-
Answer to Example 3
The eigenvalues and corresponding eigenvectors are: 1 = 7,
v1 =
(11
)
2 2 Systems of Linear Differential Equations
-
Answer to Example 3
The eigenvalues and corresponding eigenvectors are: 1 = 7,
v1 =
(11
)
and 2 = 1,v2 =
(11
).
2 2 Systems of Linear Differential Equations
-
Answer to Example 3
The eigenvalues and corresponding eigenvectors are: 1 = 7,
v1 =
(11
)
and 2 = 1,v2 =
(11
).
Therefore the solution vector is given by:
v = c1e7t
(11
)+ c2e
t
(11
)
2 2 Systems of Linear Differential Equations
-
Answer to Example 3
The eigenvalues and corresponding eigenvectors are: 1 = 7,
v1 =
(11
)
and 2 = 1,v2 =
(11
).
Therefore the solution vector is given by:
v = c1e7t
(11
)+ c2e
t
(11
)
This means: x(t) = c1e7t c2e
t and y(t) = c1e7t + c2e
t .
2 2 Systems of Linear Differential Equations
-
Example 3, Phase Plane
2 2 Systems of Linear Differential Equations