Effects of Inertial and Geometric Nonlinearities in the ...
62
Effects of Inertial and Geometric Nonlinearities in the Simulation of Flexible Aircraft Dynamics by Bosco Chun Bun Tse A thesis submitted in conformity with the requirements for the degree of Master of Applied Science Graduate Department of Institute of Aerospace Studies University of Toronto c Copyright 2013 by Bosco Chun Bun Tse
Transcript of Effects of Inertial and Geometric Nonlinearities in the ...

Effects of Inertial and Geometric Nonlinearities in theSimulation of Flexible Aircraft Dynamics
by
Bosco Chun Bun Tse
A thesis submitted in conformity with the requirementsfor the degree of Master of Applied Science
Graduate Department of Institute of Aerospace StudiesUniversity of Toronto
c© Copyright 2013 by Bosco Chun Bun Tse

Abstract
Effects of Inertial and Geometric Nonlinearities in the Simulation of Flexible Aircraft
Dynamics
Bosco Chun Bun Tse
Master of Applied Science
Graduate Department of Institute of Aerospace Studies
University of Toronto
2013
This thesis examines the relative importance of the inertial and geometric nonlinearities
in modelling the dynamics of a flexible aircraft. Inertial nonlinearities are derived by em-
ploying an exact definition of the velocity distribution and lead to coupling between the
rigid body and elastic motions. The geometric nonlinearities are obtained by applying
nonlinear theory of elasticity to the deformations. Peters’ finite state unsteady aero-
dynamic model is used to evaluate the aerodynamic forces. Three approximate models
obtained by excluding certain combinations of nonlinear terms are compared with that
of the complete dynamics equations to obtain an indication of which terms are required
for an accurate representation of the flexible aircraft behavior. A generic business jet
model is used for the analysis. The results indicate that the nonlinear terms have a
significant effect for more flexible aircraft, especially the geometric nonlinearities which
leads to increased damping in the dynamics.
ii

Acknowledgements
I would first like to offer my tremendous gratitude to my supervisor, Professor Peter R.
Grant, for his invaluable guidance, feedback and supervision throughout the course of my
studies. I would also like to thank Professor Christopher J. Damaren for his advice and
knowledge in the subject matter regarding flexible bodies, and Professor Hugh H.T. Liu,
for being on my research assessment committee and providing insightful comments and
suggestions. In addition, I would like to show my appreciation to Bruce Haycock, Eska
Ko, Sanjeev Narayanaswamy and Amir Naseri for their assistance and support within
the lab. Finally I give my heartfelt thanks to my family for their constant encouragement
and support, without which this would not have been possible.
iii

Contents
Abstract iii
Acknowledgements iii
List of Figures vi
List of Tables ix
1 Introduction 1
2 Equations of Motion for an Elastic Body 7
2.1 Kinematics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2 Dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.3 Classification of Nonlinearities . . . . . . . . . . . . . . . . . . . . . . . . 13
2.4 Approximate Models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.4.1 Consistently Linearized Model . . . . . . . . . . . . . . . . . . . . 15
2.4.2 Inconsistent Model . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.4.3 Ruthlessly Linearized Model . . . . . . . . . . . . . . . . . . . . . 16
3 Structural Model 17
3.1 Spatial Discretisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2 Strain Energy and Stiffness Matrix . . . . . . . . . . . . . . . . . . . . . 20
4 External Loads 25
4.1 Unsteady Aerodynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.2 Gravity and Thrust . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5 Simulation and Results 30
5.1 Model Implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
5.2 Longitudinal Elevator Input Response . . . . . . . . . . . . . . . . . . . . 31
iv

5.2.1 Nominal Stiffness . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5.2.2 Reduced Stiffness . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
5.3 Unsteady vs Steady Aerodynamics . . . . . . . . . . . . . . . . . . . . . 38
5.4 Lateral Rudder Input Response . . . . . . . . . . . . . . . . . . . . . . . 42
6 Conclusions 49
Bibliography 50
v

List of Figures
2.1 Fixed axes coordinate system . . . . . . . . . . . . . . . . . . . . . . . . 9
3.1 Finite Element Aircraft Structural Model . . . . . . . . . . . . . . . . . . 24
4.1 2D airfoil pitching and plunging motion in free stream . . . . . . . . . . 25
5.1 Elevator Input Deflection . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5.2 Elevator Input Response, Nominal Stiffness, xb component Velocity . . . 32
5.3 Elevator Input Response, Nominal Stiffness, zb component Velocity . . . 32
5.4 Elevator Input Response, Nominal Stiffness, yb component Angular Velocity 32
5.5 Elevator Input Response, Nominal Stiffness, Pitch Angle . . . . . . . . . 33
5.6 Elevator Input Response, Nominal Stiffness, xb component Acceleration . 33
5.7 Elevator Input Response, Nominal Stiffness, zb component Acceleration . 33
5.8 Elevator Input Response, 127m/s, Tenth Stiffness, xb component Velocity 35
5.9 Elevator Input Response, 127m/s, Tenth Stiffness, zb component Velocity 35
5.10 Elevator Input Response, 127m/s, Tenth Stiffness, yb component Angular
Velocity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.11 Elevator Input Response, 127m/s, Tenth Stiffness, Pitch Angle . . . . . . 36
5.12 Elevator Input Response, 127m/s, Tenth Stiffness, xb component Acceler-
ation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5.13 Elevator Input Response, 127m/s, Tenth Stiffness, zb component Acceler-
ation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5.14 Elevator Input Response, 203m/s, Tenth Stiffness, xb component Velocity 36
5.15 Elevator Input Response, 203m/s, Tenth Stiffness, zb component Velocity 37
5.16 Elevator Input Response, 203m/s, Tenth Stiffness, yb component Angular
Velocity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
5.17 Elevator Input Response, 203m/s, Tenth Stiffness, Pitch Angle . . . . . . 37
5.18 Elevator Input Response, 203m/s, Tenth Stiffness, xb component Acceler-
ation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
vi

5.19 Elevator Input Response, 203m/s, Tenth Stiffness, zb component Acceler-
ation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5.20 Elevator Input Response, 203m/s, Tenth Stiffness, Wing Tip Deflection . 38
5.21 Elevator Input, Tenth Stiffness, xb component Velocity - Unsteady vs
Steady Aerodynamics E . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.22 Elevator Input, Tenth Stiffness, zb component Velocity - Unsteady vs
Steady Aerodynamics E . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.23 Elevator Input, Tenth Stiffness, yb component Angular Velocity - Unsteady
vs Steady Aerodynamics E . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.24 Elevator Input, Tenth Stiffness, Pitch Angle - Unsteady vs Steady Aero-
dynamics E . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.25 Elevator Input, Tenth Stiffness, xb component Acceleration - Unsteady vs
Steady Aerodynamics E . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.26 Elevator Input, Tenth Stiffness, zb component Acceleration - Unsteady vs
Steady Aerodynamics E . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.27 Elevator Input, Tenth Stiffness, xb component Velocity - Unsteady vs
Steady Aerodynamics CL . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.28 Elevator Input, Tenth Stiffness, zb component Velocity - Unsteady vs
Steady Aerodynamics CL . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.29 Elevator Input, Tenth Stiffness, yb component Angular Velocity - Unsteady
vs Steady Aerodynamics CL . . . . . . . . . . . . . . . . . . . . . . . . . 41
5.30 Elevator Input, Tenth Stiffness, Pitch Angle - Unsteady vs Steady Aero-
dynamics CL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
5.31 Elevator Input, Tenth Stiffness, xb component Acceleration - Unsteady vs
Steady Aerodynamics CL . . . . . . . . . . . . . . . . . . . . . . . . . . 41
5.32 Elevator Input, Tenth Stiffness, zb component Acceleration - Unsteady vs
Steady Aerodynamics CL . . . . . . . . . . . . . . . . . . . . . . . . . . 41
5.33 Elevator Input Deflection . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
5.34 Rudder Input Response, 127m/s, Tenth Stiffness, xb component Velocity 42
5.35 Rudder Input Response, 127m/s, Tenth Stiffness, yb component Velocity 43
5.36 Rudder Input Response, 127m/s, Tenth Stiffness, zb component Velocity 43
5.37 Rudder Input Response, 127m/s, Tenth Stiffness, xb component Angular
Velocity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5.38 Rudder Input Response, 127m/s, Tenth Stiffness, yb component Angular
Velocity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
vii

5.39 Rudder Input Response, 127m/s, Tenth Stiffness, zb component Angular
Velocity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5.40 Rudder Input Response, 127m/s, Tenth Stiffness, Roll Angle . . . . . . . 44
5.41 Rudder Input Response, 127m/s, Tenth Stiffness, Pitch Angle . . . . . . 44
5.42 Rudder Input Response, 127m/s, Tenth Stiffness, Yaw Angle . . . . . . . 44
5.43 Rudder Input Response, 127m/s, Tenth Stiffness, xb component Acceleration 45
5.44 Rudder Input Response, 127m/s, Tenth Stiffness, yb component Acceleration 45
5.45 Rudder Input Response, 127m/s, Tenth Stiffness, zb component Acceleration 45
5.46 Rudder Input Response, 203m/s, Tenth Stiffness, xb component Velocity 45
5.47 Rudder Input Response, 203m/s, Tenth Stiffness, yb component Velocity 46
5.48 Rudder Input Response, 203m/s, Tenth Stiffness, zb component Velocity 46
5.49 Rudder Input Response, 203m/s, Tenth Stiffness, xb component Angular
Velocity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5.50 Rudder Input Response, 203m/s, Tenth Stiffness, yb component Angular
Velocity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.51 Rudder Input Response, 203m/s, Tenth Stiffness, zb component Angular
Velocity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.52 Rudder Input Response, 203m/s, Tenth Stiffness, Roll Angle . . . . . . . 47
5.53 Rudder Input Response, 203m/s, Tenth Stiffness, Pitch Angle . . . . . . 47
5.54 Rudder Input Response, 203m/s, Tenth Stiffness, Yaw Angle . . . . . . . 48
5.55 Rudder Input Response, 203m/s, Tenth Stiffness, xb component Acceleration 48
5.56 Rudder Input Response, 203m/s, Tenth Stiffness, yb component Acceleration 48
5.57 Rudder Input Response, 203m/s, Tenth Stiffness, zb component Acceleration 48
viii

List of Tables
5.1 Wing and Tail Tip Deflections Under Trim Conditions - Reduced Stiffness 35
ix

Chapter 1
Introduction
Flight simulators have many applications within the aerospace and automotive industries,
from traditional pilot training to use as engineering design and research tools. Simula-
tors are a useful means for pilots to evaluate the handling qualities of an aircraft, since
they provide a virtual environment where aircraft dynamics are replicated and controlled
repeatable conditions can be tested. However, a proper evaluation can only be accom-
plished if the simulation model is able to accurately represent the dynamics of an aircraft
in flight. Traditional aircraft have typically been designed with relatively rigid airframes
that are able to withstand the various static and dynamic loads that the aircraft encoun-
ters throughout its life cycle. As a result, existing flight simulation models often assume
that the elastic deformations of the airframe are negligible and integrate the rigid body
motion through the standard Euler’s equation.
However, advancements in materials design and construction techniques, as well as
multidisciplinary design optimization of the aircraft structure, have place increasing im-
portance in considering flexibility effects. Engineers looking for weight reduction gains
in airframe designs in order to improve performance characteristics are utilizing lighter
materials such as composites and new alloys. As well, the design of new unconventional
configurations to meet requirements for more efficient and environmentally friendly air-
craft have led to designs with long, slender bodies, high aspect ratio wings and smaller
structural thicknesses. The consequences of this are aircraft structures that have signif-
icantly larger elastic deformations, even for conditions that are within the normal flight
envelope. Since aerodynamic loads depend on the velocity and orientation of the lifting
surfaces relative to the local air flow, elastic deformations in the structure can cause the
1

Chapter 1. Introduction 2
aerodynamic forces to change. The additional aerodynamic forces generated can lead to
further elastic deformation, in turn affecting the aerodynamics. This feedback process
can result in structural oscillations that are likely to interact with the aircraft’s rigid
body dynamics and aerodynamics. In order to handle aircraft in which dynamic aeroe-
lastic effects are significant, the framework for accurate mathematical modeling must be
developed.
Several models describing the dynamic behaviour of a flexible body have been de-
veloped in the past few decades by various authors. One of the earliest formulation for
determining the aeroelastic behaviour of an unrestrained flexible vehicle was developed
by Bisplinghoff and Ashley [1]. Their equations of motion were expressed in terms of the
natural modes of the aircraft and were comprised of three inertially decoupled equations,
which describe the rigid body translations, the rigid body rotations and the elastic de-
formations of the aircraft. The mass moments of inertia was assumed to be constant,
neglecting the effects of elastic deformations on the inertia matrix. In order to obtain
the decoupling between the equations, there was an inherent assumption that the equa-
tions employed a special body-referenced axis frame that is fixed to the center of mass.
However, Bisplinghoff and Ashley did not state this directly and it was not until the
work by Milne that the reference frame used is referred to as the principal mean axes [2].
This mean axes reference frame is not fixed to a specific point on the body but rather
varies along with the motion of the body. The local body coordinate system is chosen
so that the total change in linear and angular momentum due to elastic deformations is
equal to zero and the origin is attached to the instantaneous center of mass. The mean
axes assumptions allow simplification of the equations of motion as the translations and
rotations of the reference frame are inertially decoupled from the elastic deformations
relative to this frame. Milne only examined a limited case where there flexibility in the
longitudinal direction and the aerodynamic forces are calculated without accounting for
any spanwise deformations. However, his work provided the basis for subsequent models
of flexible aircraft.
One of the most prevalent and simplest models that was later developed was presented
by Waszak and Schmidt [3]. Their formulation assumes that elastic deformations are
relatively small such that linear elastic theory can be applied and the inertia matrix
remains constant. Waszak and Schmidt also used the mean axes to simplify the equations
of motion and utilized simple aerodynamic strip theory to calculate the force and moment

Chapter 1. Introduction 3
distribution. Their formulation was applied to a general swept-wing elastic aircraft with
lumped mass properties and has been used to perform several simulation experiments in
the past [4, 5].
The use of the mean axes body frame has been criticized by Meirovitch and Tuzcu,
[6, 7] who assert that the mean axes constraints that ensure zero change in linear and
angular momentum due to deformations are often not enforced. Meirovitch and Tuzcu
argue that while authors typically express the motion variables in the mean axes in order
to eliminate coupling terms, the aerodynamic forces are not transformed into the same
axes. This leads to inconsistent results since the constraints are not enforced to both the
velocities and forces. Meirovitch and Tuzcu also suggests that even if the constraints were
properly applied, the benefits of inertial decoupling through the mean-axes assumption
would only apply to bodies in an isolated environment such as space vehicles. The advan-
tages of using the mean-axes would vanish for aircraft since the equations are still coupled
through the aerodynamic forces. Instead, Meirovitch introduced a new model using the
traditional fixed-axes reference frame where the elastic deformations are expressed rela-
tive to a reference frame attached to the undeformed body [8]. Meirovitch derived the
set of hybrid partial and ordinary differential equations of motion that couple the rigid
body motion and elastic deformations. The translational and rotational velocities are
treated as quasi-velocities, since they are expressed in terms of body axes. The equations
of motion were derived using Lagrange’s equations in terms of quasi-coordinates in order
to express the terms along the body axes instead of the inertial axes. Although the
original motivation for developing the formulation was to examine spacecraft with de-
formable appendages, Meirovitch later extended his work for the flight of flexible aircraft
and formed an integrated theory combining flight dynamics, structural dynamics, aero-
dynamics and controls [7]. The dynamic equations were examined numerically using a
conventional aircraft model. Instead of discretizing the structure using the natural modes
of the entire aircraft, the structure was broken down into wing, fuselage and empennage
components and modelled as uniform cantilever beams. The unified theory of reference
[7] was also linearized and written into state-space equations to design real-time control
system algorithms for flexible UAVs [9].
Aside from conventional aircraft configurations, other recent work have considered
very flexible structures like the High-Altitude Long-Endurance (HALE) aircraft. These
vehicles typically have very light, high aspect-ratio wings and small structural weight. To

Chapter 1. Introduction 4
analyze these types of aircraft, Shearer and Cesnik developed a nonlinear formulation that
combined the six-degree-of-freedom rigid-body equations with a geometrically nonlinear
strain-based structural model and unsteady finite state aerodynamics [10]. They com-
pared the response of a representative HALE-type aircraft when rigid-body, linearized
and nonlinear structural modelling is used. Their results demonstrated the importance
of using a nonlinear approach to properly model the aircraft’s dynamic response.
When discussing flexible body dynamics, it is also necessary to consider the phenom-
ena of geometric stiffening, also known as the foreshortening effect. Geometric stiffening
refers to the stiffening of a beam in bending due to the coupling between axial and
transverse displacements. Kane et al. [13] were the first to recognize that many existing
formulations describing the rotations of flexible beams only consider the transverse de-
flection of the beam and do not include the corresponding beam shortening in the axial
direction. As a result, these methods were unable to account for the geometric stiffening
effect and could lead to unrealistic results. Instead, Kane et al. suggested that every
transverse displacement needed to be related with an axial displacement. They achieved
this by employing the stretch coordinate s, defined as “the stretch in the beam along the
elastic axis” [13], along with the two transverse deflections v and w as the independent
kinematic variables. The resulting equations of motion contained terms which were linear
functions of the elastic coordinate and included the stiffening term. A different approach
was used by Hanagud and Sarkar, who believed that instead of using the stretch coor-
dinate, the displacements could be discretized using the three independent, orthogonal
translations u, v and w [14]. The nonlinear strain-displacement relationships were used
to obtain a strain energy expression that is a quartic function of the elastic coordinates.
The terms that account for the stiffening of the beam arise from the third and fourth or-
der terms in the strain energy. A number of other methods to model geometric stiffening
have been proposed by other authors and a thorough dicussion of the methodology and
assumptions used is given by Sharf [15]. In the review, Sharf discussed the different ap-
proaches used to include the geometric nonlinearity and concluded that the most general
and accurate approach to incorporate geometric stiffening is to use the {u, v, w} descrip-
tion of the deformation field along with the nonlinear strain-displacement relationships
to evaluate the strain energy.
The issue of flexible body dynamics have also been considered in the field of space
robotics. For example, a typical problem often studied consists of a flexible manipulator

Chapter 1. Introduction 5
arm attached to a rigid base. The motion of the base is driven along a prescribed
trajectory by applying specific torques and forces. This differs from the treatment in
aircraft dynamics where the forces acting on the aircraft are not prescribed. Instead, the
lifting surfaces which generate the aerodynamic forces are part of the flexible body. This
can result in interaction between the aerodynamics and structural dynamics. Work by
Sincarsin and Hughes, D’Eleuterio and others have used different approaches to formulate
the equations of motion of a deformable body, yet they have typically applied classical
theory of elasticity, resulting in models that exclude geometric stiffening [11, 12]. In order
to incorporate the geometric nonlinearities, it is necessary to formulate the elastic forces
using nonlinear strain-displacement relationships. Inertial nonlinearities also arise when
the motion of the deformable body is expressed relative to a floating, rather than inertial,
reference frame. A paper by Damaren and Sharf provides a succinct classification of the
different types of nonlinearities that appear in the dynamics equations [16]. They explore
the issue of whether the inertial and geometric nonlinearities need to be retained in the
equations of motion and evaluate the impact of the nonlinear terms in the simulation of
flexible-link manipulators.
The objective of this thesis is perform a similar analysis of the inertial and geo-
metric nonlinearities in the context of a deformable aircraft. This thesis will examine
the equations of motion for a flexible aircraft, subject to aerodynamic forces, with the
nonlinearities that arise by employing the nonlinear strain-displacement and kinematic
relationships. The relative importance of the nonlinear terms in the dynamics simulation
are identified by comparing the exact description with approximate models which exclude
certain combinations of nonlinear terms. The equations are implemented for a generic
business jet model with a 3D beam structure based on the aircraft model used in the
study by Meirovitch [6]. Previous work conducted by Li in the research group found that
the Meirovitch aircraft was relatively rigid [23]. Therefore, the aircraft used is scaled up
in order to produce sufficient flexibility. The unsteady finite state aerodynamic theory
developed by Peters is implemented to compute the aerodynamic forces. The work of
this thesis is organized as follows:
• Chapter 2 contains the derivation of the equations of motion for a general elastic
body. The classification of the inertial and geometric nonlinearities as well as the
definition of the approximate models are also discussed.
• Chapter 3 presents the aircraft structural model and the conversion of the motion

Chapter 1. Introduction 6
equations into discrete form for the numerical results.
• Chapter 4 discusses the external loads acting on the aircraft, including the imple-
mentation of the unsteady finite state aerodynamic model.
• Chapter 5 contains the numerical results comparing the exact and approximate
models.
• Chapter 6 highlights the conclusions of this thesis and suggests future considera-
tions.

Chapter 2
Equations of Motion for an Elastic
Body
2.1 Kinematics
A general vector quantity is expressed by v−→ = F−→T
ava, where F−→a
denotes a reference frame
and the bold lower case letter va denotes a column matrix containing the coordinates
of the vector v−→ expressed in that reference frame. The skew-symmetric operator (·)×
acting on va ∈ R3×1 is defined by
v×a =
v1
v2
v3
×
=
0 −v3 v2
v3 0 −v1
−v2 v1 0
Consider an elastic body with a body-fixed frame F−→b
with origin O on the body, as shown
in Figure 2.1. The position and orientation of F−→bwith respect to an inertial frame F−→I
is described by ρ−→ and θ−→. The kinematic relations between the inertial and non-inertial
frame are given by
CbI = F−→b
· F−→T
I
•Cb
I = −ω×CbI
where ω is the angular velocity of F b with respect to F I as expressed in F b. CbI is
the rotation matrix between F−→Iand F−→b
and it can be described by using at least three
7

Chapter 2. Equations of Motion for an Elastic Body 8
parameters, such as Euler angles. The principal rotation operators C1(ξ), C2(ξ), and
C3(ξ) are defined as
C1(ξ) =
1 0 0
0 cos(ξ) sin(ξ)
0 − sin(ξ) cos(ξ)
, C2(ξ) =
cos(ξ) 0 − sin(ξ)
0 1 0
sin(ξ) 0 cos(ξ)
,
C3(ξ) =
cos(ξ) sin(ξ) 0
− sin(ξ) cos(ξ) 0
0 0 1
The 3-2-1 Euler rotation operator, with θ = [φ θ ψ]T , is then given by C321(θ) =
C1(φ)C2(θ)C3(ψ). The angular velocity and Euler rates are related by
ω =
1 0 − sin(θ)
0 cos(φ) cos(θ) sin(φ)
0 − sin(φ) cos(θ) cos(φ)
θ , Eθ
The equations of motion are derived and expressed relative to the body fixed frame,
as shown in Figure 2.1. The undeformed position of an arbitrary point P in the body
relative to O is denoted by r−→band the elastic deformation of point P relative to its
undeformed location is denoted by u−→e. The position of P relative to the inertial frame
is then
r−→P= ρ−→+ r−→b
+ u−→e
The velocity of P is
•r−→P
=◦r−→P
+ ω−→× r−→P
=◦ρ−→+
◦r−→b
+◦u−→e
+ ω−→× ( ρ−→+ r−→b+ u−→e
)
= (◦ρ−→+ ω−→× ρ−→) +
◦u−→e
+ ω−→× ( r−→b+ u−→e
)
= v−→O+
◦u−→e
+ ω−→× ( r−→b+ u−→e
)

Chapter 2. Equations of Motion for an Elastic Body 9
where the (•
) notation indicates the time derivative in F−→Iand (
◦) indicates the time
derivative in F−→b. Expressed in the body-frame, the velocity of point P is represented as
vP (r, t) = v(t) + ue(r, t) + ω(t)×(r + ue(r, t)) (2.1)
where v(t) and ω(t) are the translational and angular velocity of the originO expressed in
the body frame and r and ue(r, t) are the undeformed location and elastic displacement
of point P expressed in F−→b. The elastic displacement is discretised according to the
Galerkin Method
ue(r, t) =sn∑α=1
ψα(r)qα(t) (2.2)
where ψα(r) are the spatial basis functions and qα(t) are the generalized coordinates as
a function of time.
Figure 2.1: Fixed axes coordinate system

Chapter 2. Equations of Motion for an Elastic Body 10
2.2 Dynamics
The equations of motion for the elastic body are obtained by using the hybrid Lagrange’s
equations as developed by Meirovitch [8]:
d
dt
(∂L
∂v
)+ ω×∂L
∂v+ Cb
I
∂L
∂ρ= f
d
dt
(∂L
∂ω
)+ v×∂L
∂v+ ω× ∂L
∂ω+ E−1∂L
∂θ= g
d
dt
(∂L
∂qα
)− ∂L
∂qα= fα α = 1, . . . , n
where ρ and θ are the components of ρ−→ and θ−→ expressed in F b, f and g are the total
external force and moment, respectively, on the body and fα are the generalized forces
associated with the basis functions. The Lagrangian is defined as L , T − U , where T
and U are the total kinetic and potential energy of the aircraft. As D’Eleuterio points
out, this is not the regular form of the Lagrange Equations but rather an application of
the Boltzmann-Hamel equations, since the velocities are expressed as quasi-coordinates
in the body reference frame rather than in an inertial frame [17]. The equations of motion
can also be derived using a Newton-Euler method based on the forces and accelerations.
The total kinetic energy is
T =1
2
∫ε
vTPvPdm
where the integral is evaluated over the domain, ε, of the body. Using Eq. 2.1 and 2.2,
T =1
2
∫ε
[v +ψαqα + ω×(r +ψαqα)]T [v +ψβ qβ + ω×(r +ψβqβ)]dm
=1
2
∫ε
vTv + vTψβ qβ + vTω×r + vTω×ψβqβ + (ψαqα)Tv + (ψαqα)Tψβ qβ + (ψαqα)Tω×r
+ (ψαqα)Tω×ψβqβ + (ω×r)Tv + (ω×r)Tψβ qβ + (ω×r)Tω×r + (ω×r)Tω×ψβqβ
+ (ω×ψαqα)Tv + (ω×ψαqα)Tψβ qβ + (ω×ψαqα)Tω×r + (ω×ψαqα)Tω×ψβqβdm
=1
2
∫ε
vTv − ωT (r +ψαqα)×(r +ψβqβ)×ω +ψTαψβ qαqβ − 2ωTv×(r +ψαqα)
+ 2vTψαqα − 2ωTψ×α (r +ψβqβ)qαdm
For this study, U will only account for the potential energy due to strain, since gravity is
included as part of the applied external forces, following the notation used by Meirovitch

Chapter 2. Equations of Motion for an Elastic Body 11
[8]. The potential energy is expressed as a nonlinear function of the elastic displacement
and consequently, due to the discretization of the displacements, a function of the gen-
eralized coordinates U = U(col{qα}). The potential energy and stiffness term is further
discussed in Section 3.2. The partial derivatives of the Lagrangian can then be calculated:
∂L
∂v=
∫ε
v + ω×(r +ψαqα) +ψαqαdm
∂L
∂ω=
∫ε
−(r +ψαqα)×(r +ψβqβ)×ω − v×(r +ψαqα)−ψ×α (r +ψβqβ)qαdm
∂L
∂qα=
∫ε
ψTαψβ qβ +ψT
αv +ψTαω
×(r +ψβqβ)dm
∂L
∂qα=
∫ε
−ωTψ×α (r +ψβqβ)×ω + vTω×ψα +ψT
βω×ψαqβdm+
∂U
∂qα
The Lagrangian is independent of ρ and θ so the derivatives ∂L∂ρ
and ∂L∂θ
are equal to zero.
Substituting into the modified Lagrange equations yields
f =
∫ε
v + ω×(r +ψαqα) + ω×ψαqα +ψαqα + ω×v + ω×ω×(r +ψαqα) + ω×ψαqαdm
= mv −∫ε
(r +ψαqα)× dmω +
∫ε
ψαdmqα +mω×v − ω×∫ε
(r +ψαqα)× dmω
+ 2ω×∫ε
ψαdmqα
g =
∫ε
−ψ×α (r +ψβqβ)×ωqα − (r +ψαqα)×ψ×
βωqβ − (r +ψαqα)×(r +ψβqβ)×ω
− v×(r +ψαqα)− v×ψαqα −ψ×α (r +ψβqβ)qα + v×ω×(r +ψαqα) + v×ψαqαdm
− ω×(r +ψαqα)×(r +ψβqβ)×ω − ω×v×(r +ψαqα)− ω×ψ×α (r +ψβqβ)qα
=
∫ε
(r +ψαqα)×dmv −∫ε
(r +ψαqα)×(r +ψβqβ)×dmω +
∫ε
(r +ψαqα)×dmψβ qβ
+ v×ω×∫ε
(r +ψαqα)dm− ω×v×∫ε
(r +ψαqα)dm− ω×∫ε
(r +ψαqα)×(r +ψβqβ)×dmω
− 2
∫ε
(r +ψαqα)×ψ×β dmωqβ

Chapter 2. Equations of Motion for an Elastic Body 12
fα =
∫ε
ψTαψβ qα +ψT
α v +ψTαω
×(r +ψβqβ) +ψTαω
×ψβ qβ + ωTψ×α (r +ψβqβ)×ω
− vTω×ψα −ψTαω
×ψβ qαdm+∂U
∂qα
=
∫ε
ψTαψβdmqα +
∫ε
ψTαdmv −
∫ε
ψTβ (r +ψαqα)×dmω + ωT
∫ε
ψ×β (r +ψαqα)×dmωqα
+
∫ε
ψTαdmω×v + 2
∫ε
ψTβψ
×αdmωqα +Kαβqβ
The resulting equations of motions for a general elastic body are then:
mv − c×ω + pαqα +mω×v − ω×c×ω + 2ω×pαqα = f
c×v + Jω + hαqα + c×ω×v + ω×Jω + 2ΓT
αωqα = g (2.3)
pTα v + hT
αω +Mαβ qα + pTαω×v − ωT Γαω + 2υTαβωqβ +Kαβqβ = fα α = 1, . . . , n
Note that there is an implied summation over the repeated index α in the first two
equations and over β in the third. Eq. 2.3 also contains a number of modal integrals,
which are defined as follows. The first moment of mass is
c = c + pαqα =
∫ε
rdm+ pαqα
where
pα =
∫ε
ψαdm
is the momentum associated with the basis functions. The mass moment of inertia is
J = −∫ε
r×r×dm+ (ΓTβ + Γβ)qβ + Πβγqβqγ
where
Γα = −∫ε
ψ×αr×dm, Παβ = −
∫ε
ψ×αψ
×β dm
Γα = Γα + Παβqβ
Also,
hα = hα − qβ∫ε
ψ×αψβdm =
∫ε
r×ψαdm− qβ∫ε
ψ×αψβdm

Chapter 2. Equations of Motion for an Elastic Body 13
and
υαβ = −∫ε
ψ×αψβdm
Finally, the mass matrix in terms of the elastic coordinate is
Mαβ =
∫ε
ψTαψβdm
and the stiffness matrix, which is further discussed in Section 3.2, is
Kαβ =∂2U
∂qα∂qβ
2.3 Classification of Nonlinearities
The equations of motion from Eq. 2.3 contain a number of nonlinear terms and the
different types of nonlinearities have been classified by Damaren and Sharf into two basic
categories, inertial and geometric [16]. The inertial nonlinearities are obtained through
the inclusion of the nonlinear term in the exact definition of the velocity distribution.
This category is further subdivided into two groups based on their contribution to the
inertial motion: the inertial forcing terms and the mass matrix terms. The geometric
nonlinearities are obtained by applying nonlinear strain-displacement relations in deter-
mining the strain energy of the elastic body and are classified according to the constant,
linear and quadratic dependence of the stiffness matrix to the generalized coordinate.
A third type of nonlinearities was identified, originating from kinematical relationships
between interconnected bodies, but as the aircraft is considered a single body, they are
not included here.
Eqs. 2.3 are rewritten into the following compressed form to highlight these inertial
and geometric nonlinearities:
MrrV + Mreqe = fT,r + f I,r (2.4)
MT
reV + Meeqe + See = fT,e + f I,e
where the velocities are collected into a generalized velocity vector V = col{v,ω} and

Chapter 2. Equations of Motion for an Elastic Body 14
qe = col{qα}. The (ˆ) notation is used to indicate quantities that are dependent on the
elastic coordinates. In this form, the terms in the equations of motion are reorganized
according to the nonlinearities classification described above. The inertial forcing func-
tions appear in the forcing components fT,r, f I,r, fT,e and f I,e. Rearranging the terms
from the equations of motion into the compressed form of Eq. 2.4, the forcing terms are
defined as:
fT,r = fT,r + δfT,r
f I,r = f I,r + δf I,r
f I,e = f I,e + δf I,e
where fT,r =
[ ∫εf(r, t)dV∫
εr×f(r, t)dV
], δfT,r =
[0∑n
α=1
∫εψ×α f(r, t)dV qα
],
f I,r =
[−mω×v + ω×c×ω
−c×ω×v − ω×Jω
], δf I,r =
[−2∑n
α=1ω×pαqα
−2∑n
α=1 ΓT
αωqα
],
f I,e = col{−pTαω×v + ωT Γαω}, δf I,e = col{−2
∑nβ=1 υ
Tβαωqβ},
and fT,e = col{fα}.The regular f terms without the overhat (ˆ) notation correspond to the inertial forces
involving the rigid body motion, whereas the variables with the (δ) notation are the
nonlinear inertial forcing terms that depend on the elastic coordinates. Similarly, the
mass matrix terms are defined as:
Mrr = Mrr + δMrr
Mre = Mre + δMre
where Mrr =
[mI −c×
c× J
], Mre =
[row{pα}
row{∫εr×ψαdm}
],
δMrr =
[0
∑nα=1−(pαqα)×∑n
α=1(pαqα)×∑n
α=1[(ΓTα + Γα)qα +
∑nβ=1 Παβqαqβ]
],
δMre =
[0
row{∑n
β=1 υαβqβ}
], and Mee = matrix{
∫εψTαψβdm}
The unhatted terms correspond to the constant part of the mass matrix, whereas the (δ)
terms are the nonlinear mass matrix correction terms which contain the dependence on
the elastic coordinate qα.

Chapter 2. Equations of Motion for an Elastic Body 15
Finally the stiffness term See is defined as:
See = Keeqe = (K0 +1
2K1 +
1
3K2)qe (2.5)
where the Ki terms indicate the ith order dependence of the stiffness matrix on the
generalized coordinate. These correspond to the constant, linear and quadratic terms of
the geometric nonlinearities. The evaluation of the Ki stiffness terms is further discussed
in Section 3.2.
2.4 Approximate Models
In order to determine the relative importance of the different nonlinearities, Damaren and
Sharf suggested three approximate models to compare with the exact case [16]. These
are derived by excluding certain combinations of the nonlinear terms in the dynamics
equations. The exact model, which includes all the nonlinearities, is used as the baseline
for comparison with these approximate models. It is denoted by E.
(Mrr + δMrr) V + (Mre + δMre) qe = (fT,r + δfT,r) + (f I,r + δf I,r)
(Mre + δMre)T V + Meeqe + (K0 + 1
2K1 + 1
3K2)qe = fT,e + (f I,e + δf I,e)
2.4.1 Consistently Linearized Model
The consistently linearized approximation, denoted by CL, includes the inertial forcing
functions without the mass matrix corrections and the constant and linear geometric
stiffness terms. However, the first-order stiffness matrix used here is different from the
definition used by Damaren and Sharf [16]. K1 will retain its dependence on the gen-
eralized coordinate, in contrast to the constant axial load assumption used by Damaren
and Sharf to convert the stiffness matrix into a “pseudo-constant form” [16].
(Mrr) V + (Mre) qe = (fT,r + δfT,r) + (f I,r + δf I,r)
(Mre)T V + Meeqe + (K0 + 1
2K1)qe = fT,e + (f I,e + δf I,e)

Chapter 2. Equations of Motion for an Elastic Body 16
2.4.2 Inconsistent Model
The inconsistent model, denoted by I, includes all the inertial nonlinearities but omits
the geometric ones.
(Mrr + δMrr) V + (Mre + δMre) qe = (fT,r + δfT,r) + (f I,r + δf I,r)
(Mre + δMre)T V + Meeqe + (K0)qe = fT,e + (f I,e + δf I,e)
2.4.3 Ruthlessly Linearized Model
The ruthlessly linearized model, denoted by RL, is the most simplified approximation
as it incorporates none of the nonlinear terms. Only the constant mass matrix and the
linear inertial forcing components are retained.
(Mrr) V + (Mre) qe = (fT,r) + (f I,r)
(Mre)T V + Meeqe + (K0)qe = fT,e + (f I,e)

Chapter 3
Structural Model
In the previous chapter, the equations of motion for a general elastic body was derived
using the modified Lagrange’s equations as developed by Meirovitch. This chapter will
describe the aircraft structural model and the conversion of the integral terms from
the motion equations into discrete expressions in accordance with the lumped form of
the aircraft data. The evaluation of the stiffness matrix using the mode shapes is also
discussed. A previous study by Li [23] had found that the aircraft model was not flexible
enough to generate significant structural oscillations in the aircraft response. Therefore,
a scaled version of the original aircraft data is used to increase flexibility following the
scaling method employed by Li [23].
3.1 Spatial Discretisation
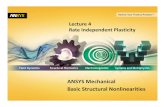
The aircraft data is based on the Meirovitch aircraft model [7], which is similar to a Cessna
Citation 500. The structure is composed of 116 nodes connected by 3D beam elements
which represent the elastic axes of the components, as shown in Figure 3.1. Material
properties are constant over each beam element. The aircraft is divided into seven main
components: fore and aft fuselage, left and right wing, left and right horizontal tail and
vertical tail. The inertia properties are provided in lumped form, where the aircraft
structure is divided into bays. For each bay, the mass distribution is represented as a
lumped mass and corresponding moments and products of inertia about the center of
mass of the bay.
The basis functions of the aircraft which are used to spatially discretise the displace-
17

Chapter 3. Structural Model 18
ments are obtained using the finite element method. In accordance with the definition
of the fixed-axes reference frame, the natural mode shapes must satisfy the constrained
boundary-node condition at the origin of F−→b. The FEA program CADRE Pro 6 is used
to model the aircraft mass and structure and solve for the basis functions, which provides
the displacement and rotation at each of the structural nodes. The displacement along
the elastic axis of any of the connecting beam elements can be interpolated from the
nodal displacements. In order to determine the displacement of a point in the body away
from the elastic axis, the following linearized displacement field is assumed:
ue =
uo
vo
wo
=
u− ∂v
∂xy − ∂w
∂xz
v − φzw + φy
(3.1)
where u, v, and w are the displacements of the elastic axis and φ is the angle of twist.
Assuming that the angles are small so that the derivatives ∂v∂x
and ∂w∂x
are equal to the
rotational displacements,
ue =
u
v
w
+
0 −z −y−z 0 0
y 0 0
φ
θ
ψ
= uea +
0 −z −y−z 0 0
y 0 0
φeawhere uea and φea are the displacement and rotation of the elastic axis. The elastic
deformation can then be discretised using the mode shapes
ue =n∑
α=1
ψuα +
0 −z −y−z 0 0
y 0 0
ψφα
qα (3.2)
where ψuα = [uα vα wα]T and ψφ
α = [φα θα ψα]T are the displacements and rotations for
mode shape α. This expression is of the same form as Eq. 2.2, with the term in the
brackets equivalent to ψα for the assumed displacement field.
Eq. 2.3 assumes that the continuous mass density of the aircraft is known. However,
since the inertia properties of the aircraft are only provided in lumped form, the integrals
in the equations of motion need to be converted into discrete form. Integrating over each

Chapter 3. Structural Model 19
mass bay gives the following summations:
pα =
∫ε
ψαdm =
∫ε
ψuα +
0 −z −y−z 0 0
y 0 0
ψφαdm
=∑i
mi
ψuα +
0 −rz −ry−rz 0 0
ry 0 0
ψφα
hα =
∫ε
r×ψαdm =∑i
mir×
ψuα +
0 −rz −ry−rz 0 0
ry 0 0
ψφα
Γα = −∫ε
ψ×αr×dm =
∑i
mi
ψuα +
0 −rz −ry−rz 0 0
ry 0 0
ψφα
×r×
Mαβ =
∫ε
ψTαψβdm =
∫ε
(ψuα + [...]ψφ
α)T (ψuβ + [...]ψφ
β)dm
=∑i
mi
(ψuTα ψ
uβ + ry(φαwβ − ψαuβ) + rz(−θαuβ − φαvβ) + ry(wαφβ − uαψβ)
+ rz(−uαθβ − vαφβ))
+ ψαJzzψβ + θαJyzψβ + ψαJyzθβ + θαJyyθβ + φαJxxφβ
υαβ = −∫ε
ψ×αψβdm = −
∫ε
(ψuα + [...]ψφ
α)×(ψuβ + [...]ψφ
β)dm
=∑i
−miψu×α ψ
uβ −mi
wαφβrz + vαφβry
−wαψβry − wαθβrz − uαφβryvαψβry + vαθβrz − uαψβrx
−mi
−φαwβrz − φαvβry
ψαwβry + θαwβrz + φαuβry
−ψαvβry − θαvβrz + φαuβrx
−mi
0
−φαJzzψβ + ψαJzzφβ − φαJyzθβ + θαJyzφβ
−φαJyyθβ + ψαJyyθβ − φαJyzψβ + ψαJyzφβ

Chapter 3. Structural Model 20
Παβ = −∫ε
ψ×αψ
×β dm = −
∫ε
(ψuα + [...]ψφ
α)×(ψuβ + [...]ψφ
β)×dm
=∑i
−miψu×α ψ
u×β
−mi
−φαwβry + φαuβrz −φαuβrz φαuβry
−ψαvβry − θαvβrz −φαwβry + ψαuβry + θαuβrz φαvβry
−ψαwβry − θαwβrz −φαwβrz φαvβrz + ψαuβry + θαuβrz
−mi
−wαφβry + vαφβrz −vαψβry − vαθβrz −wαψβry − wαθβrz
−uαφβrz −wαφβry + uαψβry + uαθβrz −wαφβrzuαφβry vαφβry vαφβrz + uαψβry + uαθβrz
−
−φαJxxφβ φαJyzψβ + φαJyyθβ
ψαJyzφβ + θαJyyφβ −φαJzzφβ − ψαJzzψβ − ψαJyzθβ − θαJyzψβ − θαJyyθβ−ψαJzzφβ − θαJyzφβ −φαJyzφβ
−φαJzzψβ − φαJyzθβ−φαJyzφβ
−φαJyyφβ − ψαJzzψβ − ψαJyzθβ − θαJyzψβ − θαJyyθβ
where ry and rz are the location of the mass center from the elastic axis.
3.2 Strain Energy and Stiffness Matrix
The elastic force term See defined in Eq. 2.5 is obtained using the technique described
by Rajasekaran and Murray [18]. First, the nonlinear Green’s strain-displacement rela-
tionships are considered:
εxx =∂uo∂x
+1
2
[(∂uo∂x
)2
+
(∂vo∂x
)2
+
(∂wo∂x
)2]
εyy =∂vo∂y
+1
2
[(∂uo∂y
)2
+
(∂vo∂y
)2
+
(∂wo∂y
)2]
εzz =∂wo∂z
+1
2
[(∂uo∂z
)2
+
(∂vo∂z
)2
+
(∂wo∂z
)2]

Chapter 3. Structural Model 21
γxy =∂uo∂y
+∂vo∂x
+
(∂uo∂x
∂uo∂y
+∂vo∂x
∂vo∂y
+∂wo∂x
∂uo∂y
)γzx =
∂wo∂x
+∂uo∂z
+
(∂uo∂x
∂uo∂z
+∂vo∂x
∂vo∂z
+∂wo∂x
∂uo∂z
)γyz =
∂vo∂z
+∂wo∂y
+
(∂uo∂y
∂uo∂z
+∂vo∂y
∂vo∂z
+∂wo∂y
∂uo∂z
)The displacements uo, vo, and wo are related to the elastic axis displacements using Eq.
3.1. The strain energy of the elastic body is
U =1
2
∫ε
εT CεdV (3.3)
where ε is the vector of strain components ε = [εi=1...6]T = [εxx εyy εzz γxy γzx γyz]
T
and C is the linear elastic constitutive matrix. Each component of strain can be broken
down into linear and nonlinear parts and rewritten in the form:
εi = εLi + εNLi = LTi d + 1
2dTHid (3.4)
where d = [∂u∂x
∂v∂x
∂w∂x
∂φ∂x
∂2v∂x2
∂2w∂x2
]T are the displacement gradients. For instance, εxx
can be written in matrix form as
εxx =[1 0 0 0 −y −z
]d + 1
2dT
1 0 0 0 −y −z0 1 0 −z 0 0
0 0 1 y 0 0
0 −z y y2 + z2 0 0
−y 0 0 0 y2 yz
−z 0 0 0 yz z2
d
If the displacements are expressed in terms of generalized coordinates as [u v w φ]T =
Nqe, the displacement gradients can be obtained by differentiating and putting the
derivatives in the form d = Dqe. When the strain components are substituted into
Eq. 3.3, Rajasekaran shows that the strain energy can be written in the form
U = qTe [12K0 + 1
6K1 + 1
12K2]qe (3.5)

Chapter 3. Structural Model 22
where
K0 = E
∫ε
DTLiLTi DdV
K1 = E
∫ε
DT(Lid
THi + dTLiHi + HidLTi
)DdV
K2 = E
∫ε
DT(HiddTHi+
12dTHidHi
)DdV
This provides the stiffness matrix in Eq. 2.5 where Ki can be obtained directly from the
terms in the square brackets in Eq. 3.5 when Castigliano’s First theorem is applied to find
the elastic forces. In order to evaluate the integrals, expressions for D (and consequently
N) are required. The finite element analysis only provides the displacements at the two
nodes of each element. Therefore, the deformation within each element are interpolated
from the nodal displacements. Since the strain expression contains the first derivative
of u and φ and the second derivatives of v and w, a linear function is used for the axial
and twist directions and cubic polynomials for the bending directions. Then, for each
element the displacements are:
u
v
w
φ
=
1 x 0 0 0 0 0 0 0 0 0 0
0 0 1 x x2 x3 0 0 0 0 0 0
0 0 0 0 0 0 1 x x2 x3 0 0
0 0 0 0 0 0 0 0 0 0 1 x
a1,1 a1,2 . . . a1,n
a2,1 a2,2 :
b1,1 :
b2,1
b3,1
b4,1
c1,1
c2,1
c3,1
c4,1
d1,1 : :
d2,1 d2,2 . . . d2,n
q1
q2...
qn
, N1N2qe
(3.6)

Chapter 3. Structural Model 23
where
N2 =
1 0 0 0 0 0 0 0 0 0 0 0
−1l
0 0 0 0 0 1l
0 0 0 0 0
0 1 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 1 0 0 0 0 0 0
0 − 3l2
0 0 0 −2l
0 3l2
0 0 0 −1l
0 2l3
0 0 0 1l2
0 − 2l3
0 0 0 1l2
0 0 1 0 0 0 0 0 0 0 0 0
0 0 0 0 1 0 0 0 0 0 0 0
0 0 − 3l2
0 −2l
0 0 0 3l2
0 −1l
0
0 0 2l3
0 1l2
0 0 0 − 2l3
0 1l2
0
0 0 0 1 0 0 0 0 0 0 0 0
0 0 0 −1l
0 0 0 0 0 1l
0 0
u1,1 u1,2 . . . u1,n
v2,1 v2,2 :
w1,1 :
φ1,1
θ1,1
ψ1,1
u2,1
v2,1
w2,1
φ2,1
θ2,1 : :
ψ2,1 ψ2,2 . . . ψ4,n
and (u, v, w, φ, θ, ψ)i,j are the nodal displacement/rotations at the two ends of the element
for the jth basis function. In this form, N1 is the only part of N that is a function of x
and it is easily differentiated to obtain D. The integrals for the stiffness terms in Eq. 3.5
can be evaluated using equations 3.4 and 3.6.

Chapter 3. Structural Model 24
Figure 3.1: Finite Element Aircraft Structural Model

Chapter 4
External Loads
The external loads acting on the aircraft are captured within the f and g terms in
the equations of motion. For this model, the load is divided into three components:
aerodynamics, gravity, and the engine thrust.
4.1 Unsteady Aerodynamics
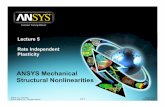
The aerodynamic forces and moments are calculated using the unsteady finite state
aerodynamic theory developed by Peters [19]. This theory calculates the aerodynamic
loads on a thin 2D airfoil undergoing small arbitrary deformations relative to a reference
frame, where the reference frame itself can have large motions. For this model, the wings
and empennages are assumed to deform along the direction of the elastic axis but the
airfoil section is taken to be rigid. Therefore the airfoil deformations are only used to
account for the trailing edge control surface deflections. In the theory, the airfoil and its
wake is represented by thin sheets of vorticity which are assumed to be parallel to the
free stream velocity U , as shown in Figure 4.1. Expressions for the lift and moment per
Figure 4.1: 2D airfoil pitching and plunging motion in free stream
25

Chapter 4. External Loads 26
unit length are obtained by applying the nonpenetration boundary condition through the
airfoil and are calculated as:
L = πρb2(h+Uθ−dθ)+CLαρUb(h+Uθ+( b2−d)θ−λ0)+CLδuρb(c1U
2δu+ c2Uδu+ c3δu)
M = ( b2− d)L− πρb3(1
2h+ Uθ + ( b
8− d
2)θ) + CLδuρb
2(c4U2δu + c5Uδu + c6δu)
where h is the plunging velocity of the airfoil at the elastic axis located a distance d
behind the midchord, b is the semichord length of the airfoil, and θ is the angle between
the freestream velocity and the zero-lift line. δu is the control surface deflection, ρ is
the air density, CLα is the local lift curve slope, and CLδu is the control effectiveness
coefficient. The parameter λ0 is the average inflow velocity calculated as a weighted sum
of the inflow states λn:
λ0 =1
2
N∑n=1
bnλn , bn =
{(−1)n−1 (N+n−1)!
(N−n−1)!(n!)2, n 6= N
(−1)n−1 , n = N
where bn are the binomial expansion coefficients. The inflow dynamics are derived by
assuming that the shed vortices remain in the plane of the airfoil and travel downstream
with the same velocity as the flow. λn are the solutions to the differential equation:
Aλ =−Ubλ+ c
[h+ U θ + (
b
2− d)θ
](4.1)
where λ = col{λn} and the components of the coefficient matrices are defined as
A = D + dbT
+ cdT
+ 12cb
T
Dnm =
12n
, n = m+ 1
− 12n
, n = m− 1
0 , n 6= m± 1
, cn =2
n, dn =
{12, n = 1
0 , n 6= 1
The terms ci=1...6 are functions of the airfoil camber [20]. Generally the deflection deriva-
tive terms containing δu and δu are much smaller compared to the control surface de-
flection and are assumed to be zero here. Therefore only the coefficients c1 and c4 are

Chapter 4. External Loads 27
required and they are calculated as:
c1 = (g1 + 2g2 + 3g3 + 4g4 + . . .)
c4 = 12g0
where gi are geometric expansion coefficients related to the airfoil camber g(x) as expan-
sions in the Glauert variable, x = b cos(φ) where −b ≤ x ≤ b, 0 ≤ φ ≤ π [21]. Defining
nδu as the number of semichords that the control surface hinge lies behind the midchord
and φm = cos−1(nδu),
g0 =b
π
(sin(φm)− φm cos(φm)
)g1 =
b
π
(φm − sin(φm) cos(φm)
)gi≥2 =
b
π
(1
i+ 1sin((i+ 1)φm
)+
1
i− 1sin((i− 1)φm
)− 2
icos(φm) sin(iφm)
)The drag per unit length is calculated using [20, 22]:
D = CD0ρbU2 + CLαρb(h+ Uθ − dθ − λ0)(h+ Uθ + ( b
2− d)θ − λ0)
+ CLδuρbδu
(−c1Uh+ (dc1 + bg2)Uθ + c1Uλ0 − 1
2bg2h+ (1
2bdg2 − 1
4b2g3)θ
)where CD0 is the parasitic drag coefficient. The Meirovitch aircraft model provides the
aerodynamic coefficients for lifting surfaces on the wing, horizontal and vertical tail
and forward fuselage. The lifting surfaces are divided into a number of panels and
the aerodynamic coefficients are given for each section. Since the forces and moment
expressions depend on the local motion of the airfoil section and this will vary along the
span, a different case of the inflow differential equation in Eq. 4.1 is applied to each
panel, which are solved along with the equations of motion. In the undeformed state,
the aerodynamic strips are arranged such that they are parallel to the x-axis of F−→b. A
local aerodynamic frame F−→i,ais defined for each component of the body such that it is
oriented with the x-axis along the elastic axis, y-axis towards the nose of the aircraft and
the z-axis completing the right-handed coordinate system. Let Cabi
denote the rotation
matrix from F−→bto F−→i,a
and C321(ψφi,αa
qα) the rotation matrix accounting for the elastic

Chapter 4. External Loads 28
rotation. The aerodynamic force vector expressed in F−→bis
f i,a = CaTbi
C321(ψφi,αa
qα)T
0
Li sinαi −Di cosαi
−Li cosαi −Di sinαi
where αi is the effective angle of attack that depends on the pitch rate, plunge velocity
and induced flow:
α = θ +h
U+θ
U
(b
2− d)− λ0U
The moment due to the aerodynamic forces about the origin of the body frame is
gi,a = CaTbi
C321(ψφi,αa
qα)T
−Mi
0
0
+ (ria +ψui,αa
qα)×f i,a
4.2 Gravity and Thrust
The gravity forces are calculated by summing the contributions from each of the mass
bays. Using g ≈ 9.806m/s2, the gravitational force and moment are
f i,g = CbI
[0 0 g
]Tmi
gi,g =
ri +
ψui,α +
0 −rz −ry−rz 0 0
ry 0 0
ψφi,α
qα
×
f i,g
The thrust is delivered via two engines attached to the aft portion of the fuselage. The
force from each engine is
f i,e = C321(ψφi,αeqα)TCb
e
[FE 0 0
]Twhere FE is a scalar representing the thrust generated by the engine, Cb
e is the rotation
between the thrust vector and the body frame, and the e subscript indicates it is relative

Chapter 4. External Loads 29
to the engine location. The associated moment is
gi,e = (ri,e +ψi,αeqα)×f i,e
The generalized force for any of the loads is calculated using
fα =∑i
(ψuTi,αf i +ψφT
i,αgi)

Chapter 5
Simulation and Results
5.1 Model Implementation
The model simulation is implemented in Matlab using a numerical time marching method.
The equations of motion in Eq. 2.4 are a set of second order ODEs of the form Mx+Cx+
Kx = F. The solution is found by isolating the x term and inverting M so that the state
vector can be integrated for the next time step. Since the second derivative of the local
motion variables appear in the expressions for the aerodynamic forces and inflow states,
an implicit ODE function is used to solve the equations. Eq. 2.4 are integrated along
with the inflow state equations Eq. 4.1 for each panel and the quasicoordinates-velocity
relationships:
ρ = CbTI v θ = E−1ω
The integral terms c, J, pα, Γα, Παβ, hα, ναβ, Mαβ, and K0 are all constant and are
evaluated prior to integration. The higher order terms that have an elastic dependence,
including K1 and K2, vary as the generalized coordinates qα changes with time and have
to be recalculated at each time step. The aircraft is trimmed to a steady, level flight
condition by determining the engine thrust, aircraft pitch angle, elevator deflection and
steady-state structural deformation required for the aircraft to fly with zero net forces
and moments. For steady level flight at a specified airspeed V , the roll and yaw angles
30

Chapter 5. Simulation and Results 31
are zero so the body velocity is
v = CbI
V
0
0
=
V cos θ
0
V sin θ
As well, the angular velocity and elastic deformation rates qα are assumed to be zero.
The initial velocity is V = 127m/s at an altitude of 7620m. The average induced flow λ0
in Eq. 4.1 is approximated with N = 5 inflow states.
5.2 Longitudinal Elevator Input Response
In this section, the response of the exact model is compared to the approximate models
for a longitudinal elevator input. A 2-3-1-1 elevator input, shown in Fig. 5.1 is used to
perturb the aircraft from the trim condition in order to excite a dynamic response. The
step inputs are low-pass filtered using the transfer function 10.05s+1
to make the elevator
deflections more representative of a realistic pilot input. The eight lowest symmetric
modes of the aircraft are included for this simulation.
0 5 10 15−0.05
0
0.05
δ e (ra
d)
time (s)
Figure 5.1: Elevator Input Deflection
5.2.1 Nominal Stiffness
The response of the aircraft to the elevator input is shown in Figures 5.2 to 5.7. Since
the input is symmetric, only the longitudinal variables are included. The behaviour
predicted by all three approximate cases are very similar to the exact model and only
small effects are seen relative to the rigid model. This is expected since the aircraft
structure is relatively rigid for the nominal stiffness and small elastic deformations would

Chapter 5. Simulation and Results 32
give nonlinearities that are small. In the trim condition, the magnitude of the wing tip
deflection is only 0.58m for the 24.86m wing span.
0 5 10 15125
125.5
126
126.5
127
Time (s)
Vx (
m/s
)
ECLIRLRigid
Figure 5.2: Elevator Input Response, Nominal Stiffness, xb component Velocity
0 5 10 1516
17
18
19
Time (s)
Vz (
m/s
)
ECLIRLRigid
Figure 5.3: Elevator Input Response, Nominal Stiffness, zb component Velocity
0 5 10 15−0.02
−0.01
0
0.01
0.02
Time (s)
ωy (
rad/
s)
ECLIRLRigid
Figure 5.4: Elevator Input Response, Nominal Stiffness, yb component Angular Velocity

Chapter 5. Simulation and Results 33
0 5 10 150.12
0.13
0.14
0.15
0.16
0.17
Time (s)
θ (r
ad)
ECLIRLRigid
Figure 5.5: Elevator Input Response, Nominal Stiffness, Pitch Angle
0 5 10 15−0.4
−0.2
0
0.2
0.4
a x (m
/s2 )
Time (s)
ECLIRLRigid
Figure 5.6: Elevator Input Response, Nominal Stiffness, xb component Acceleration
0 5 10 15−3
−2
−1
0
1
2
a z (m
/s2 )
Time (s)
ECLIRLRigid
Figure 5.7: Elevator Input Response, Nominal Stiffness, zb component Acceleration

Chapter 5. Simulation and Results 34
5.2.2 Reduced Stiffness
The aircraft stiffness is reduced in order to obtain a structural model that would have
larger deformations. This is implemented by dividing the material properties of the beam
elements by a factor of 10. The wing and horizontal tail tip deflections predicted by each
model in the trim condition are tabulated in Table 5.1. The trimmed aircraft has less
deformation in the exact case, when the nonlinear strain-displacement is used. This is
expected since the nonlinear stiffness terms should increase the stiffness of the aircraft
by taking into account the geometric stiffening effect. The response of the aircraft is
shown in Figures 5.8 to 5.13. There are more noticeable differences between the exact
and approximate models in this case. Since the aircraft is mostly undergoing rigid body
motion with little structural oscillation, the shapes of the plots are very similar. However,
there is an offset between the plots since the initial trim conditions are different between
the models.
Figures 5.14 to 5.19 show the response with a greater initial velocity at V = 203 m/s.
As the velocity is increased, the bending and twisting of the wings begin to interact with
the aerodynamic forces and larger structural oscillations occur as the aircraft approaches
its flutter condition. More significant differences are observed between the exact and ap-
proximate models. Figure 5.20 shows the time history of the vertical wing tip deflection.
Again the exact model has smaller deformations due to the additional stiffening from the
second-order geometric nonlinearities. The exact model has higher damping in the re-
sponse whereas all three approximate models predict larger oscillations in the structure.
As observed in Figure 5.16, the exact model oscillatory response that occurs in ωy after
the input (at around 6s) damps out more quickly than the other models. Similar results
are seen in the other state variables as well. This indicates that the second order stiffness
terms are critical in the dynamic equations for very flexible aircraft undergoing significant
structural vibrations. There is little to distinguish the results between the approximate
models though, suggesting that the elastic deformations do not cause a large change to
the mass matrix and the inertial forcing terms are small.

Chapter 5. Simulation and Results 35
Table 5.1: Wing and Tail Tip Deflections Under Trim Conditions - Reduced StiffnessModel Wing Tip (m) Horizontal Tail Tip (m)
E 2.84 0.26CL 4.93 0.26I 4.93 0.26
RL 4.95 0.14
0 5 10 15125
125.5
126
126.5
127
Time (s)
Vx (
m/s
)
ECLIRLRigid
Figure 5.8: Elevator Input Response, 127m/s, Tenth Stiffness, xb component Velocity
0 5 10 1512
14
16
18
20
Time (s)
Vz (
m/s
)
ECLIRLRigid
Figure 5.9: Elevator Input Response, 127m/s, Tenth Stiffness, zb component Velocity
0 5 10 15−0.04
−0.02
0
0.02
0.04
Time (s)
ωy (
rad/
s)
ECLIRLRigid
Figure 5.10: Elevator Input Response, 127m/s, Tenth Stiffness, yb component AngularVelocity

Chapter 5. Simulation and Results 36
0 5 10 150.1
0.12
0.14
0.16
Time (s)
θ (r
ad)
ECLIRLRigid
Figure 5.11: Elevator Input Response, 127m/s, Tenth Stiffness, Pitch Angle
0 5 10 15−0.5
0
0.5
a x (m
/s2 )
Time (s)
ECLIRLRigid
Figure 5.12: Elevator Input Response, 127m/s, Tenth Stiffness, xb component Accelera-tion
0 5 10 15−4
−2
0
2
4
a z (m
/s2 )
Time (s)
ECLIRLRigid
Figure 5.13: Elevator Input Response, 127m/s, Tenth Stiffness, zb component Accelera-tion
0 5 10 15176.5
177
177.5
178
178.5
179
Time (s)
Vx (
m/s
)
ECLIRLRigid
Figure 5.14: Elevator Input Response, 203m/s, Tenth Stiffness, xb component Velocity

Chapter 5. Simulation and Results 37
0 5 10 150
5
10
15
20
Time (s)
Vz (
m/s
)
ECLIRLRigid
Figure 5.15: Elevator Input Response, 203m/s, Tenth Stiffness, zb component Velocity
0 5 10 15−0.15
−0.1
−0.05
0
0.05
0.1
Time (s)
ωy (
rad/
s)
ECLIRLRigid
Figure 5.16: Elevator Input Response, 203m/s, Tenth Stiffness, yb component AngularVelocity
0 5 10 150
0.02
0.04
0.06
0.08
0.1
Time (s)
θ (r
ad)
ECLIRLRigid
Figure 5.17: Elevator Input Response, 203m/s, Tenth Stiffness, Pitch Angle
0 5 10 15−1
−0.5
0
0.5
1
a x (m
/s2 )
Time (s)
ECLIRLRigid
Figure 5.18: Elevator Input Response, 203m/s, Tenth Stiffness, xb component Accelera-tion

Chapter 5. Simulation and Results 38
0 5 10 15−20
−10
0
10
20
a z (m
/s2 )
Time (s)
ECLIRLRigid
Figure 5.19: Elevator Input Response, 203m/s, Tenth Stiffness, zb component Accelera-tion
0 5 10 152
4
6
8
Def
lect
ion
(m)
Time (s)
ECLIRL
Figure 5.20: Elevator Input Response, 203m/s, Tenth Stiffness, Wing Tip Deflection
5.3 Unsteady vs Steady Aerodynamics
The effect of including an unsteady aerodynamic model is examined by comparing the
results using steady aerodynamics, which corresponds to the case where the number of
inflow states is set to N = 0. The results are computed for the reduced aircraft stiffness
with the same elevator input for the exact model. As seen in Figures 5.21 to 5.26, the
unsteady and steady aerodynamics actually produce very similar motions. The differences
between the unsteady and steady aerodynamics are more prominent when looking at the
consistently linearized model, shown in Figures 5.27 to 5.32. This is expected since the
unsteady effects become more important when the airfoil is moving rapidly relative to
the airflow and in the approximate case there are larger oscillations than the exact model
which has more damping.

Chapter 5. Simulation and Results 39
0 5 10 15176.8
177
177.2
177.4
177.6
177.8
Time (s)
Vx (
m/s
)
unsteadysteady
Figure 5.21: Elevator Input, Tenth Stiffness, xb component Velocity - Unsteady vs SteadyAerodynamics E
0 5 10 156
8
10
12
14
16
Time (s)
v z (m
/s)
unsteadysteady
Figure 5.22: Elevator Input, Tenth Stiffness, zb component Velocity - Unsteady vs SteadyAerodynamics E
0 5 10 15−0.1
−0.05
0
0.05
0.1
Time (s)
ωy (
rad/
s)
unsteadysteady
Figure 5.23: Elevator Input, Tenth Stiffness, yb component Angular Velocity - Unsteadyvs Steady Aerodynamics E
0 5 10 150.02
0.04
0.06
0.08
0.1
Time (s)
θ (r
ad)
unsteadysteady
Figure 5.24: Elevator Input, Tenth Stiffness, Pitch Angle - Unsteady vs Steady Aerody-namics E

Chapter 5. Simulation and Results 40
0 5 10 15−1
−0.5
0
0.5
1
a x (m
/s2 )
Time (s)
unsteadysteady
Figure 5.25: Elevator Input, Tenth Stiffness, xb component Acceleration - Unsteady vsSteady Aerodynamics E
0 5 10 15−15
−10
−5
0
5
10
a z (m
/s2 )
Time (s)
unsteadysteady
Figure 5.26: Elevator Input, Tenth Stiffness, zb component Acceleration - Unsteady vsSteady Aerodynamics E
0 5 10 15177
177.5
178
178.5
Time (s)
Vx (
m/s
)
unsteadysteady
Figure 5.27: Elevator Input, Tenth Stiffness, xb component Velocity - Unsteady vs SteadyAerodynamics CL
0 5 10 150
5
10
15
Time (s)
v z (m
/s)
unsteadysteady
Figure 5.28: Elevator Input, Tenth Stiffness, zb component Velocity - Unsteady vs SteadyAerodynamics CL

Chapter 5. Simulation and Results 41
0 5 10 15−0.15
−0.1
−0.05
0
0.05
0.1
Time (s)
ωy (
rad/
s)
unsteadysteady
Figure 5.29: Elevator Input, Tenth Stiffness, yb component Angular Velocity - Unsteadyvs Steady Aerodynamics CL
0 5 10 150
0.02
0.04
0.06
0.08
0.1
Time (s)
θ (r
ad)
unsteadysteady
Figure 5.30: Elevator Input, Tenth Stiffness, Pitch Angle - Unsteady vs Steady Aerody-namics CL
0 5 10 15−1
−0.5
0
0.5
1
a x (m
/s2 )
Time (s)
unsteadysteady
Figure 5.31: Elevator Input, Tenth Stiffness, xb component Acceleration - Unsteady vsSteady Aerodynamics CL
0 5 10 15−20
−10
0
10
20
a z (m
/s2 )
Time (s)
unsteadysteady
Figure 5.32: Elevator Input, Tenth Stiffness, zb component Acceleration - Unsteady vsSteady Aerodynamics CL

Chapter 5. Simulation and Results 42
5.4 Lateral Rudder Input Response
The aircraft response is also compared for a lateral input through the rudder. The input
rudder input deflection is shown in Fig. 5.33. The 12 lowest modes of the aircraft are
included for this simulation. Results are obtained for the reduced stiffness aircraft at the
two velocities. Figures 5.34 to 5.45 show the response at V = 127m/s and Figures 5.46
to 5.57 at V = 203m/s. The results are again very similar at the lower speed. In Figures
5.34, 5.36 and 5.41, the plots of the approximate cases are offset from the exact model due
to the different initial trim conditions but the shapes of the plots are very similar. Small
differences occur during the transient period where the rudder is deflected, as observed
in Figures 5.37 and 5.45, but in general there is good agreement between the models. At
the higher speed the structural oscillations become more significant. Increased damping
is observed with the exact model and the response differs greatly from the other models.
0 5 10 15−0.05
0
0.05
δ r (ra
d)
time (s)
Figure 5.33: Elevator Input Deflection
0 5 10 15125.7
125.8
125.9
126
126.1
126.2
Time (s)
Vx (
m/s
)
ECLIRLRigid
Figure 5.34: Rudder Input Response, 127m/s, Tenth Stiffness, xb component Velocity

Chapter 5. Simulation and Results 43
0 5 10 15−4
−2
0
2
4
Time (s)
Vy (
m/s
)
ECLIRLRigid
Figure 5.35: Rudder Input Response, 127m/s, Tenth Stiffness, yb component Velocity
0 5 10 1515
16
17
18
Time (s)
Vz (
m/s
)
ECLIRLRigid
Figure 5.36: Rudder Input Response, 127m/s, Tenth Stiffness, zb component Velocity
0 5 10 15−0.1
−0.05
0
0.05
0.1
Time (s)
ωx (
rad/
s)
ECLIRLRigid
Figure 5.37: Rudder Input Response, 127m/s, Tenth Stiffness, xb component AngularVelocity
0 5 10 15−1
0
1
2
3x 10−3
Time (s)
ωy (
rad/
s)
ECLIRLRigid
Figure 5.38: Rudder Input Response, 127m/s, Tenth Stiffness, yb component AngularVelocity

Chapter 5. Simulation and Results 44
0 5 10 15−0.04
−0.02
0
0.02
0.04
Time (s)
ωz (
rad/
s)
ECLIRLRigid
Figure 5.39: Rudder Input Response, 127m/s, Tenth Stiffness, zb component AngularVelocity
0 5 10 15−0.02
0
0.02
0.04
Time (s)
φ (r
ad)
ECLIRLRigid
Figure 5.40: Rudder Input Response, 127m/s, Tenth Stiffness, Roll Angle
0 5 10 150.12
0.125
0.13
0.135
0.14
0.145
Time (s)
θ (r
ad)
ECLIRLRigid
Figure 5.41: Rudder Input Response, 127m/s, Tenth Stiffness, Pitch Angle
0 5 10 15−0.02
−0.01
0
0.01
0.02
0.03
Time (s)
ψ (
rad)
ECLIRLRigid
Figure 5.42: Rudder Input Response, 127m/s, Tenth Stiffness, Yaw Angle

Chapter 5. Simulation and Results 45
0 5 10 15−0.1
−0.05
0
0.05
0.1
a x (m
/s2 )
Time (s)
ECLIRLRigid
Figure 5.43: Rudder Input Response, 127m/s, Tenth Stiffness, xb component Acceleration
0 5 10 15−6
−4
−2
0
2
4
a y (m
/s2 )
Time (s)
ECLIRLRigid
Figure 5.44: Rudder Input Response, 127m/s, Tenth Stiffness, yb component Acceleration
0 5 10 15−0.2
0
0.2
0.4
0.6
a z (m
/s2 )
Time (s)
ECLIRLRigid
Figure 5.45: Rudder Input Response, 127m/s, Tenth Stiffness, zb component Acceleration
0 5 10 15168
170
172
174
176
178
Time (s)
Vx (
m/s
)
ECLIRLRigid
Figure 5.46: Rudder Input Response, 203m/s, Tenth Stiffness, xb component Velocity

Chapter 5. Simulation and Results 46
0 5 10 15−10
−5
0
5
10
15
Time (s)
Vy (
m/s
)
ECLIRLRigid
Figure 5.47: Rudder Input Response, 203m/s, Tenth Stiffness, yb component Velocity
0 5 10 158
10
12
14
16
18
Time (s)
Vz (
m/s
)
ECLIRLRigid
Figure 5.48: Rudder Input Response, 203m/s, Tenth Stiffness, zb component Velocity
0 5 10 15−0.3
−0.2
−0.1
0
0.1
0.2
Time (s)
ωx (
rad/
s)
ECLIRLRigid
Figure 5.49: Rudder Input Response, 203m/s, Tenth Stiffness, xb component AngularVelocity

Chapter 5. Simulation and Results 47
0 5 10 15−0.04
−0.02
0
0.02
0.04
0.06
Time (s)
ωy (
rad/
s)
ECLIRLRigid
Figure 5.50: Rudder Input Response, 203m/s, Tenth Stiffness, yb component AngularVelocity
0 5 10 15−0.2
−0.1
0
0.1
0.2
Time (s)
ωz (
rad/
s)
ECLIRLRigid
Figure 5.51: Rudder Input Response, 203m/s, Tenth Stiffness, zb component AngularVelocity
0 5 10 15−0.1
−0.05
0
0.05
0.1
Time (s)
φ (r
ad)
ECLIRLRigid
Figure 5.52: Rudder Input Response, 203m/s, Tenth Stiffness, Roll Angle
0 5 10 150
0.05
0.1
0.15
0.2
Time (s)
θ (r
ad)
ECLIRLRigid
Figure 5.53: Rudder Input Response, 203m/s, Tenth Stiffness, Pitch Angle

Chapter 5. Simulation and Results 48
0 5 10 15−0.1
−0.05
0
0.05
0.1
Time (s)
ψ (
rad)
ECLIRLRigid
Figure 5.54: Rudder Input Response, 203m/s, Tenth Stiffness, Yaw Angle
0 5 10 15−1.5
−1
−0.5
0
0.5
a x (m
/s2 )
Time (s)
ECLIRLRigid
Figure 5.55: Rudder Input Response, 203m/s, Tenth Stiffness, xb component Acceleration
0 5 10 15−40
−20
0
20
40
a y (m
/s2 )
Time (s)
ECLIRLRigid
Figure 5.56: Rudder Input Response, 203m/s, Tenth Stiffness, yb component Acceleration
0 5 10 15−10
−5
0
5
10
a z (m
/s2 )
Time (s)
ECLIRLRigid
Figure 5.57: Rudder Input Response, 203m/s, Tenth Stiffness, zb component Acceleration

Chapter 6
Conclusions
The objective of this thesis was to determine the importance of the inertial and geometric
nonlinearities that appear in the equations governing the dynamics of a flexible aircraft.
The exact equations of motion were developed using nonlinear strain-displacement and
kinematic relationships. An unsteady finite state aerodynamic model was used to com-
pute the aerodynamic forces. Three approximate models were obtained from the exact
formulation by excluding certain combinations of the inertial and geometric nonlinear-
ities. The comparisons between the exact and approximate models performed for a
longitudinal elevator input and lateral rudder input suggested that the linearized equa-
tions of motion are sufficient for relatively stiff aircraft but the nonlinearities become
more important with increased flexibility. In particular, the geometric nonlinearities are
needed to account for the geometric stiffening effect as well as increased damping in the
dynamic behaviour.
The exclusion of the inertial nonlinearities, specifically the mass matrix correction
terms in the consistently linearized and ruthlessly linearized models, did not have a
significant effect on the aircraft dynamics, as the linearized models generally predicted
similar aircraft responses. This suggests that the constant inertia matrix assumption
used in formulations by Waszak and Schmidt [3] and other authors is valid as the elastic
deformations only cause a very small change to the mass moments of inertia. However,
in this study the flexibility of the aircraft model was increased by uniformly reducing the
stiffness of the structure from the Meirovitch data. It would be useful to perform the
simulation using structural data based on an actual flexible aircraft.
In this study, the exact case was used as a baseline for comparison with the three ap-
49

Chapter 6. Conclusions 50
proximate cases. While all the terms derived from the nonlinear elasticity and kinematic
expressions were retained in the exact model, it still relies on several assumptions. For
instance, the displacements in the body away from the elastic axis are calculated using
an assumed linear displacement field and the aircraft mass distribution is evaluated in
discrete, lumped form. In order to better evaluate the accuracy of the models, the dy-
namic responses predicted by the formulation need to be compared to actual flight test
data.

Bibliography
[1] Bisplinghoff, R.L., and Ashley, H., Principles of Aeroelasticity, Wiley, New York,
1962, Chapter 9.
[2] Milne, R.D., “Dynamics of the Deformable Airplane Part 1,” Aeronautical Research
Council Reports and Memoranda, No. 3345, September 1964
[3] Waszak, M., and Schmidt, D., “Flight Dynamics of Aeroelastic Vehicles,” Journal
of Aircraft, Vol. 25, No. 6, June 1988, pp. 563-571.
[4] Schmidt, D.K., and Raney, D.L., “Modeling and Simulation of Flexible Flight Vehi-
cles,” Journal of Guidance, Control and Dynamics, Vol. 24, No. 3, May-June 2001,
pp. 539-546.
[5] Raney, D.L., Jackson, E.B., and Buttrill, C.S., “Simulation Study of Impact of
Aeroelastic Characteristics on Flying Qualities of a High Speed Civil Transport,”
NASA-TP 2002-211943, NASA Langley Research Center, Virginia, 2002.
[6] Meirovitch, L., and Tuzcu, I., “The Lure of Mean Axes,” Journal of Applied Me-
chanics, Vol. 74, May 2007, pp. 497-504.
[7] Meirovitch, L., and Tuzcu, I., “Integrated Approach to the Dynamics and Control
of Maneuvering Flexible Aircraft,” NASA-CR 211748, June 2003.
[8] Meirovitch, L., “Hybrid State Equations of Motion for Flexible Bodies in Terms of
Quasi-Coordinates,” Journal of Guidance, Control, and Dynamics, Vol. 14, No. 5,
September 1991, pp. 1008-1013.
[9] Meirovitch, L., “Unified Theory for the Dynamics and Control of Maneuvering Flex-
ible Aircraft,” AIAA Journal, Vol. 42, No. 4, April 2004, pp. 714-727.
51

Bibliography 52
[10] Shearer, C., and Cesnik, C., “Nonlinear Flight Dynamics of Very Flexible Aircraft,”
Journal of Aircraft, Vol. 44, No. 5, October 2007, pp. 1528-1545.
[11] Sincarsin, G.B., and Hughes, P.C., “Dynamics of Elastic Multibody Chains: Part
B-Global Dynamics,” Dynamics and Stability of Systems, Vol. 4, No. 3-4, 1989, pp.
227-243.
[12] D’Eleuterio, G.M.T., “Dynamics of Elastic Multibody chains: Part C-Recursive
Dynamics,” Dynamics and Stability of Systems, Vol. 7, No. 2, 1992, pp. 215-224.
[13] Kane, T.R., Ryan, R.R., and Banerjee, A.K., “ Dynamics of a Cantilever Beam
Attached to a Moving Base,” Journal of Guidance, Control, and Dynamics, Vol. 10,
No. 2, 1987, 139-151.
[14] Hanagud, S., and Sarkar, S., “ Problem of the Dynamics of a Cantilever Beam
Attached to a Moving Base,” Journal of Guidance, Control, and Dynamics, Vol. 12,
No. 3, 1989, pp. 438-441.
[15] Sharf, I., “ Geometric Stiffening in Multibody Dynamics Formulations,” Journal of
Guidance, Control, and Dynamics, Vol. 18, No. 4, August 1995, pp. 882-890.
[16] Damaren, C., and Sharf, I., “Simulation of Flexible-Link Manipulators With Inertial
Geometric Nonlinearities,” Journal of Dynamic Systems Measurement and Control,
Transaction of American Society of Mechanical Engineers, March 1995, Vol. 117,
pp. 74-87.
[17] D’Eleuterio, G., and Barfoot, T., “A Discrete Quasi-Coordinate Formulation for the
Dynamics of Elastic Bodies,” Journal of Applied Mechanics, American Society of
Mechanical Engineers, March 2007, Vol. 74, pp. 231-239.
[18] Rajasekaran, S., and Murray, D., “Incremental Finite Element Matrices,” Journal
of the Structural Division, Vol. 99, No. 12, December 1973, pp. 2423-2438.
[19] Peters, D., Karunamoorthy, S., and Cao, W., “Finite State Induced Flow Models,
Part 1: Two-Dimensional Thin Airfoil,” Journal of Aircraft, Vol. 32, No. 2, April
1995, pp. 313-322.
[20] Brown, E., “Integrated Strain Actuation in Aircraft with Highly Flexible Composite
Wings,” Ph.D. Dissertation, Massachusetts Institute of Technology, 2003.

Bibliography 53
[21] Peters, D., and Johnson, M., “Finite-State Airloads for Deformable Airfoils on Fixed
and Rotating Wings,” Proceedings of Aeroelasticity and Fluid/Structure Interaction,
American Society of Mechanical Engineers, November 1994, pp. 1-28.
[22] Peters, D.A., Barwey, D., and Su, A., “An Integrated Airloads-Inflow Model for
Use in Rotor Aeroelasticity and Control Analysis,” Mathematical and Computer
Modelling, Vol. 19, No. 3/4, 1994, pp. 109-123.
[23] Li, N., “Modelling of Flexible Aircraft for 3D Motion-Based Flight Simulators,”
M.A.Sc. thesis, University of Toronto, 2010.