Harmonic Domain Modelling of Transformer Core Nonlinearities ...

Research ArticleGust Load Alleviation including Geometric NonlinearitiesBased on Dynamic Linearization of Structural ROM
Chao An , Chao Yang, Changchuan Xie , and Yang Meng
School of Aeronautics Science and Engineering, Beihang University, Beijing 100080, China
Correspondence should be addressed to Changchuan Xie; [email protected]
Received 19 November 2018; Revised 20 February 2019; Accepted 17 March 2019; Published 12 May 2019
Academic Editor: Enrico Cestino
Copyright © 2019 Chao An et al. This is an open access article distributed under the Creative Commons Attribution License, whichpermits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This paper describes a framework for an active control technique applied to gust load alleviation (GLA) of a flexible wing, includinggeometric nonlinearities. Nonlinear structure reduced order model (ROM) and nonplanar double-lattice method (DLM) are usedfor structural and aerodynamic modeling. The structural modeling method presented herein describes stiffness nonlinearities inpolynomial formulation. Nonlinear stiffness can be derived by stepwise regression. Inertia terms are constant with linearapproximation. Boundary conditions and kernel functions in the nonplanar DLM are determined by structural deformation toreflect a nonlinear effect. However, the governing equation is still linear. A state-space equation is established in a dynamiclinearized system around the prescribed static equilibrium state after nonlinear static aeroelastic analysis. Gust response analysiscan be conducted subsequently. For GLA analysis, a classic proportional-integral-derivative (PID) controller treats a servo as anactuator and acceleration as the feedback signal. Moreover, a wind tunnel test has been completed and the effectiveness of thecontrol technology is validated. A remote-controlled (RC) model servo is chosen in the wind tunnel test. Numerical simulationresults of gust response analysis reach agreement with test results. Furthermore, the control system gives GLA efficacy of verticalacceleration and root bending moment with the reduction rate being over 20%. The method described in this paper is suitablefor gust response analysis and control strategy design for large flexible wings.
1. Introduction
With the development of high-altitude long-endurance(HALE) aircraft, the geometric nonlinear effects in aeroelas-tic analysis are becoming more and more significant, becausethey severely influence aerodynamic configuration and struc-tural dynamic characteristics. Light weight and large flexibil-ity have been necessary for the improvement of flightperformance which causes a large deformation of the struc-ture. The characteristics of both structural dynamics andaerodynamics need to be solved based on the deformed con-figuration as the geometric nonlinear aeroelasticity of a slen-der wing is analyzed. On the one hand, the lifting surface ofaerodynamics is a curved surface. The geometrical relation-ship and boundary conditions in aerodynamic calculationsare different from the linear method, which we call the non-planar effect. On the other hand, the stiffness of the structurevaries with a large deformation which is neglected in a linearcondition. According to Patil et al., the concept of geometric
nonlinear aeroelasticity was proposed in 1999 [1, 2]. Theaeroelastic behavior turns out to be very different after con-sidering nonlinear flexibility. Scores of research illustrate thatgeometric nonlinearities notably influence static aeroelasticconfiguration, flutter speed, and dynamic response. Patilet al. applied the exact intrinsic beam model in nonlinearaeroelastic analysis with linear state-space aerodynamics[3]. Tang and Dowell used the Hodge-Dowell equations inresponse to the problem of a high-aspect-ratio wing withthe ONERA model of dynamic stall [4]. Frulla et al. investi-gated the dynamic characteristics of a flexible wing with anonlinear beam model and an indicial function [5, 6]. Theprocedure took into account the large static deflection ofthe wing under aerodynamic loads. They point out thatchordwise stiffness and elastic axis eccentricity parametersplay an important role in nonlinear aeroelastic behavior.Abbas et al. performed the response analysis of HALE air-craft considering the imbalanced effects originating fromthe noncoincidence of the center of mass with the elastic axis
HindawiInternational Journal of Aerospace EngineeringVolume 2019, Article ID 3207912, 20 pageshttps://doi.org/10.1155/2019/3207912

[7]. Jian and Jinwu have studied the LCO, velocity, and drageffect with structural geometric nonlinearities on the staticand dynamic aeroelastic characteristics [8]. Xie and Yangused nonlinear finite element method (FEM) and strip theoryto simulate aeroelastic behavior of a metal wing under largedeformation [9].
For large flexible aircraft, more attention needs to be paidon gust load due to the variation of stiffness with large defor-mation. Su and Cesnik studied the dynamic response of ahighly flexible wing under a spatially-distributed discretegust model in the time domain [10]. Guo et al. studied thenonlinear gust response of free flexible aircraft using aCFD/CSD method [11]. Wang et al. used the exact intrinsicbeam model for discrete gust response simulation of veryflexible aircraft with unsteady vortex lattice method [12].Liu et al. established a theoretical geometrically nonlinearaeroelastic analysis framework and validated results withwind tunnel tests [13]. On the part of gust load alleviation(GLA), Dillsaver et al. performed linear-quadratic-Gaussian(LQG) GLA control of the rigid-elastic coupling in a flexibleaircraft by reducing wing deflection by 47% [14]. Cook et al.conducted robust GLA control and stability analysis of a flex-ible wing. A comparison of closed-loop responses with theopen-loop dynamics for both linearized and nonlinear sys-tems was made to discrete gust distributions [15]. Wanget al. employed static output feedback to reduce the wingtip deflection of a flexible unmanned aerial vehicle by 33%[16]. Ricci et al. summarized the GLAMOUR project, whichwas a project that worked on GLA techniques for advancedregional aircraft. The wind tunnel model design and controlstrategy were presented as well [17].
Because of aerodynamic configuration and structuralstiffness variation with deformation, large flexible structuremodeling is vital in geometric aeroelastic analysis. NonlinearFEM as a traditional modeling method has been taken widelyin geometric nonlinear analysis with an iterative process[3, 18–20]. The intrinsic beam model is an exact modelthat describes the beam dynamics evaluated by Hodges[21]. It can be coupled with the finite-state inflow theoryin a state-space form, which is convenient for the nonlin-ear analysis of dynamic behavior [22]. The multibodydynamic simulation is another tool for aeroelastic systemanalysis with arbitrary types of nonlinearities. Krugeret al. and Zhao and Ren researched the stability and con-trol of the HALE configuration aircraft [23, 24]. Theadvantage of multibody simulation is the convenience forconsidering the interactions of rigid body motion andaeroelastic deformation [25]. While beam modeling maynot be sufficient to capture complex structural details pres-ent in aircraft wings, nonlinear FEM may be very costlyfor dynamic simulations.
Modal analysis is the standard method in linear aeroelas-tic analysis. However, a large deformation brings the chang-ing of stiffness and the deformation cannot be representedby the linear modal approach, especially the foreshorteningeffect. Geometric nonlinearities cannot be captured like thelinear way. The reduced order model (ROM) based on themodal form was developed for resolving that problem.Mignolet and Soize showed that the nonlinear stiffness can
be described in an equation with the quadratic and cubicterms of the basis function [26]. Based on that formulation,McEwan et al. performed the modal/FE method (MFE) bystatic analysis with numbers of specified static load cases. Itis useful in the dynamic simulation of shells under intenseacoustic excitation [27]. Hollkmap and Gordon improvedthat method to recover the in-plane deformation with theouter one [28]. Harmin and Cooper implied it for modelingthe geometric nonlinearity of a large-aspect-ratio wing model[29]. Although the vertical deflection of the wing can besolved exactly, the foreshortening effect cannot be solved.Cestino et al. reduced the partial differential equations ofthe nonlinear beam model to a dimensionless form in termsof three ordinary differential equations with Galerkin’smethod. Nonlinear flutter analysis is presented based on anonlinear equilibrium condition [30]. Kim et al. used ProperOrthogonal Decomposition (POD) to capture the foreshor-tening effect. Spanwise deflection can be solved, but the fore-shortening effect cannot be reflected in a nonlinear stiffnessmatrix directly [31].
The purpose of the present paper is to give an analysisframework of gust response analysis and GLA based on thedynamic linearization of a structural ROM. Nonlinearstiffness coefficients are described in a specified modal for-mulation. Except for linear modes, additional orthogonalspanwise modes are used to describe the foreshorteningeffects of the wing. Displacements under the follower forcesas load cases are solved by nonlinear FEM. Unknown nonlin-ear stiffness coefficients are obtained from a curve-fittingprocedure, and useless terms are rejected by stepwise regres-sion. The method presented here achieves good agreementwith those from the nonlinear FEM.
After the structural ROM was obtained, the dynamic lin-earization of ROM was implemented for stiffness descriptionunder a static equilibrium state. The unsteady nonplanaraerodynamics of the linearized system is coupled with a line-arized ROM. A state-space model for a deformed wing hasbeen established for gust response and GLA analysis. Feed-back control is established for GLA, including the accelera-tion of wing tip and root bending moments. Significantly, awind tunnel test is conducted with a remote-controlled(RC) model servo. The wing model and the wind tunnel testhave also been introduced in a previous work [32]. Gustresponse results show that the method presented in thispaper is feasible and the GLA strategy is effective in a numer-ical simulation and in a wind tunnel test.
2. Formulation
2.1. Structure of ROM
2.1.1. Nonlinear Structure Equation. The development of thestructural ROM method is based on equations derived fromthe Galerkin approach to solve the geometric nonlineardynamics in a weak form [26]. The equation of motion of astructure may often be given in dynamic equations as follows:
∂ FijSjk∂Xk
+ ρ0b0i = ρ0ui, i, j, k = 1, 2, 3 , 1
2 International Journal of Aerospace Engineering

where the tensor S is the Second Piola-Kirchoff stress tensor.The tensor F is the deformation gradient tensor, ρ0 is themass density of the structure, and b0 is the volumetric force.X is the position vector of the structure in the reference con-figuration, and x is the deformed one so that the displace-ment vector is u = x − X. The deformed gradient tensor canbe defined as follows:
Fij =∂xi∂Xj
= δij +∂ui∂Xj
, 2
where δij is the Kronecker symbol.In order to approximate the solution with the Galerkin
approach, a set of basis functions that describes the displace-ment can be written as follows:
ui X = 〠n
j=1Φij X qj, 3
where Φij X satisfies all the boundary conditions and repre-sents the component i of the jth basis function, and qj are theassociated generalized coordinates.
Applying equation (3) to equation (1) which should beexpressed in a weak form and proceeding with the Galerkinapproach as shown byMignolet and Soize [26], a third degreepolynomial describes the nonlinear relationship of thedynamic equation corresponding to mode i in terms of thegeneralized coordinates:
Mijqj + E 1ij qj + E 2
ijl qjql + E 3ijlpqjqlqp = f i, 4
whereMij are the terms of the reduced mass matrix, f i is the
modal component of the external force, and E 1ij , E
2ijl , and
E 3ijlp are the components of tensors of reduced stiffness. The
Einstein summation convention is applied in formulation.The analytical expression of the mass matrix and stiffnessmatrix can be achieved being directly related to the basisfunctions and relations of materials. But it is not practical,especially the FEM model which is complex. It should benoted that the geometric nonlinear effects are assumed notto impact the structural inertia, and therefore, the reducedmass matrix.
When a truncated basis of the linear modes is chosen as
the basis function, Mij and E 1ij can be expressed as follows:
Mij =Mi, i = j,
Mij = 0, i ≠ j,
E 1ij = Ei, i = j,
E 1ij = 0, i ≠ j,
5
whereMi is the modal mass term of the ith basis function andEi is the modal stiffness term of the ith basis function. The
formulation of nonlinear dynamic equations correspondingto mode i can be
Miqi + Eiqi + E 2ijl qjql + E 3
ijlpqjqlqp = f i 6
The stiffness is related to the deformation of structure.The tangent stiffness equation for the incremental forcesand displacement can be written as follows:
Δf = KTΔq, 7
where f = f1, f2,… f nT is the vector of modal force and
q = q1, q2,… qnT is the vector of modal coordinates.
Considering equation (6), the terms KTij of tangent stiff-ness matrix KT under an equilibrium deformation q∗ canbe described as:
KTij =∂ Eiqi + E 2
imlqmql + E 3imlpqmqlqp
∂qjq=q∗
8
The mass matrix M is assembled as equation (6)including the modal mass term:
M = diag M1,M2,… ,Mn 9
It is generally a good approximation even for a verylarge structural deformation.
As a consequence, introducing the harmonic oscillatingassumption, the eigenvalue problem of a structure under astable deformation can be expressed as follows:
det KT − ω2M = 0, 10
where ω is the vibration circular frequency under the equilib-rium deformation. The eigenvectors, also called quasimodes,can also be solved. They are useful in the stability analysis ofgeometric nonlinear aeroelasticity.
2.1.2. Foreshortening Effect under Large Deformation. Fore-shortening effects under large deformations have a greatinfluence in geometric nonlinear problems, especially aero-elastic problems, because the shortening effect of the span-wise projection of a wing will change the aerodynamicdistribution. A truncated basis of the linear modes has beenchosen as the basis function in our ROM research. A few lin-ear modes that are truncated will not show the shorteningeffect of the wing in ROM analysis. Two orthogonal spanwisemodes are taken into the establishment of ROM to describethe foreshortening effects of the wing. The combination oftruncated linear modes and orthogonal spanwise modes isgenerated as a basis function in the nonlinear structure ofROM described in Section 2.1.1.
2.1.3. Regression Analysis for Solving the Nonlinear StiffnessCoefficient. As described before, the explicit calculation ofnonlinear stiffness is not practical. Regression analysis is used
3International Journal of Aerospace Engineering

to identify the nonlinear stiffness coefficients E 2ijl and E 3
ijlp.The static formulation of equation (6) is as follows:
E 2ijl qjql + E 3
ijlpqjqlqp = f i − Eiqi 11
Evidently, if there is a set of specified static loads and cor-responding structural deformations, the unknown nonlinearstiffness terms related to the applied loads and the structuraldisplacement resultant can be solved by using regressionanalysis. The set of specified loads and corresponding struc-tural deformations can be denoted as the static test load caseand calculated by a commercial FEM software package.
Consider that there areNTsets of static test load cases. Wecan get NT sets of corresponding displacement after com-pleting static FEM analysis of the NT sets of test loads onthe model in a commercial finite element software. Loadsand deformations are translated into modal space. For thesake of finding the unknown nonlinear modal stiffness terms,
the left side of equation (11) can be curve fitted in a regres-sion progress. A regression problem can be presented asfollows:
E 2ijl q
1j q
1l + E 3
ijlpq1j q
1l q
1p = f 1i − Eiq
1i ,
E 2ijl q
2j q
2l + E 3
ijlpq2j q
2l q
2p = f 2i − Eiq
2i ,
⋮
E 2ijl q
NTj qNTl + E 3
ijlpqNTj qNTl qNTp = f NTi − Eiq
NTi
12
The Einstein summation convention is applied in equa-tion (11) and equation (12). It should be noted that thesuperscripts without brackets denote the serial number ofthe test cases from 1 to NT instead of the power value. Sim-plify equation (12) and the regression problem can be pre-sented in matrix short notation as follows:
Here, q i is aNT × 1 vector containing themodal restor-ing forces corresponding tomode i in each of the test sets, andq i is aNT × 1 vector containing curve-fitted values ofmodalrestoring forces with the caret indicating the fitted rather thanthe exact values. ANL i is a vector including all unknownstiff-ness terms corresponding tomode i.Di is amatrix correspond-ing to mode i denoted as the design matrix in the regressionproblem.
In our research, two bending modes, two twist modes,one chordwise bending mode, and two spanwise modes areused to establish nonlinear ROM. The regression problemshould be solved seven times with those seven modes.
2.1.4. Strategy for Generating Test Load Cases. Through theabovementioned analysis, regression analysis is performedusing the commercial software package on the actual
q i ≈ q i =Di ANL i,
q i =
f 1i − Eiq1i
f 2i − Eiq2i
⋮
f NTi − EiqNTi
,
Di =
q11q11 q11q
12 ⋯ q11q
11q
11 q11q
11q
12 ⋯
q21q21 q21q
22 ⋯ q21q
21q
21 q21q
21q
22 ⋮
⋮ ⋮ ⋱ ⋮ ⋮ ⋮
qNT1 qNT1 qNT1 qNT2 ⋯ qNT1 qNT1 qNT1 qNT1 qNT1 qNT2 ⋯
,
ANL i =
E 2i11
E 2i12
⋮
E 3i111
E 3i112
⋮
13
4 International Journal of Aerospace Engineering

deformation and load testing after FEM analysis; thus, theaccuracy of the nonlinear stiffness coefficients directlydepends on the rationality of the selected test load case,which is related to the success of the recovery of the nonlin-ear structure equation. The selection of test load cases mustemphasize that the aerodynamic force on the wing shouldbe a follower force, which more closely resembles the actualcharacteristics of the aerodynamic force. That is, taking anoriented load as the load test case cannot satisfy therequirements. In this paper, the aerodynamic force underthe deformation-combined bending and torsion modes ischosen as the test load case. The formulation of the wingdeformation, which generates aerodynamic forces, shouldbe as follows:
f AIR u = f AIR 〠ai ϕi bend+〠aj ϕ j torsion14
Here, ϕi bend and ϕj torsionrepresent the investigated
bending and torsion modes, respectively, and ai,j repre-sents the scalar mode weight factors, through which theselected test cases contain the nonlinear characteristics ofthe structure investigated in our research.
2.1.5. Selection of Nonlinear Stiffness Coefficients. The selec-tion of nonlinear stiffness coefficients is the main problemin structural ROM establishment. In general, for the accuracyof ROM to be high, the nonlinear stiffness coefficients shouldhave enough flexibility to approximate the training points.However, if the number of coefficients is large, an overfittingproblemmay obviously occur. The number of nonlinear stiff-ness coefficients utilizing N modes NC is as follows:
NC = 2N + 3N
2+
N
3, N ≥ 3, 15
where
N
k=
Nk N − k
16
With 7 modes used in our research, the number of nonlinearstiffness coefficients is 112. The overfitting problem cannotbe neglected in the nonlinear structural ROM method.
The stepwise regression procedure is a statistical proce-dure to select variables in a regression space. It is computa-tionally efficient because it gives intermediate statisticalinformation at each stage of the calculation which is used toselect the most appropriate coefficients to be added into themodel. The procedure of stepwise regression can be summa-rized as follows:
(1) The regression analysis problem corresponding toequation (12) has the variables x = x1, x2,… , xj,… xNc
. At first, all variables are not introducedinto the regression equation
(2) Chose the term in unintroduced variables which hasthe maximum value of the partial regression qua-dratic sum as the introduced term for the regressionequation, and do the significance test. If it passesthe test, the term can be preserved in the equation.Otherwise, it will not be considered
(3) Choose the term in the regression equation which hasthe minimal value of the partial regression quadraticsum, and do the significance test. If it passes the test,the term can be preserved in the equation. Otherwise,it will be removed
(4) Repeat (2) and (3) above, until no terms can be intro-duced or removed
By the stepwise regression procedure, the best nonlinearROM model will be determined. The joint hypotheses test(F-test) is used for the specified criterion in the significancetest and is expressed as follows [33]:
F = ∑NTi=1 y∧i − y 2
∑NTi=1 y∧i − yi
2 NT − 2 ~F 1,NT − 2 , 17
where yi is the fitted value of the regression, yi is the observedvalue of the regression, and y =∑NT
i=1yi/NT is the mean valueof the observed values.
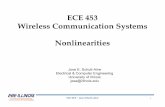
2.2. Unsteady Aerodynamics. In this paper, unsteadyaerodynamics in gust response analysis and GLA analysisare calculated by the nonplanar double-lattice method(DLM) [32, 34]. Aerodynamics mesh and double-latticeelement location should be determined on the deformed sur-face and updated with structure deflection as shown inFigure 1(a).
In traditional DLM, unsteady aerodynamic pressure atthe lattice element is as follows:
Δp =12ρV2D−1w, 18
where ρ is the density of airflow, V is the air speed, D is theaerodynamic coefficient matrix, and w is the boundary con-dition expressed as follows:
w = ϕH′ + ikbϕH q, 19
where ϕH is the mode shape matrix at the control points,ϕH′ is the mode shape slope along the inflow direction atthe control point, q is the general coordinate of modes, bis the reference chord length, and k = bω/V is the reducedfrequency.
Another critical problem of nonplanar DLM is theimplementation of exact geometric boundary conditions.The local normal wash velocity is shown in Figure 1(b).Due to large deformations, the lifting surface cannot betreated as oscillating about the xy-plane. The boundary
5International Journal of Aerospace Engineering

condition related to the local geometric nonlinearity canbe written based on modes as follows:
wn = f H′ + ikbf H q, 20
where wn is the nondimensional induced velocity in thenormal direction of the local lattice and f H is the modalvibration shape function of the structure in a local normaldirection and it should be different under various equilib-rium states. According to the deformed configuration, f His updated related to M and KT described in equations(7)–(9) before.
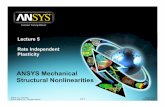
2.3. Gust Model. The discrete gust model is often used inaircraft design, flight quality assessment, and control sys-tem design. It is a simple and effective gust modelingform. The “1-cos” gust model is chosen as the gust modelin this paper. The indication of the “1-cos” gust model isshown in Figure 2. The gust section can be expressed asfollows:
Wg Xg =Wg0
21 − cos
2πXg
Lg, 0 ≤ Xg ≤ Lg, 21
where Wg0 is the gust amplitude, Xg is the location of air-craft, and Lg is the gust scale.
2.4. Synthesized Modeling. Unsteady aerodynamic forcesexcited by structure vibration, deflection of the control
surface, and gust in the frequency domain are calculated bynonplanar DLM, and we have
Fq + Fδ + Fg =12ρV2 QqTq +Qδδ +Qgwg , 22
where Fq are the vibration-induced equivalent nodal loads;Fδ are the nodal loads caused by control surfaces; Fg arethe gust-induced equivalent nodal loads; and QqT , Qδ, andQg are the aerodynamic influence coefficient matrices withrespect to the structure of the quasimodes of the static equi-librium configuration, control surface modes, and gustmodes, respectively, which are complex functions of reducedfrequency. q denote the modal coordinate vector, δ denotedeflection vector of control surface, and wg denote the gustvelocity vector.
In order to express the motion equation in a state-spaceform, the frequency domain unsteady aerodynamics shouldbe described in the time domain. The time domain aerody-namics can be obtained with Karpel’s minimum-state ratio-nal function approximation [32]:
Q s ≈ A0 + A1s + A2s2 +Ds Is − Rs
−1Ess, 23
where s = sb/V , s is the Laplace variable, and b is the ref-erence chord length. An n = 0, 1, 2 , Ds, and Es are thepolynomial fitting coefficient matrices solved by a leastsquare fitting, and Rs is a diagonal matrix with aerody-namic lag roots.
By combining quasimodes around the equilibrium statewith aerodynamic modeling and servo modeling, the aero-elastic equations of motion in generalized coordinates canbe expressed as follows:
Mqq Mqδ
q
δ+ CqT 0
q
δ+ KqT 0
q
δ
=12ρV2 QqT Qδ
q
δ+12ρV2Qgwg,
24
Lg
Xg
Wg0
V
Figure 2: “1-cos” gust.
O
z
y
x
(a) Nonplanar lattice on a deformed lifting surface
Double-lattice line
Normal wash
(b) Typical doublet-lattice line and its normal vector
Figure 1: Lattice of nonplanar DLM [32].
6 International Journal of Aerospace Engineering

where QqT , Qδ, and Qg are generalized unsteady aerody-namic influence coefficient matrices corresponding to thestatic equilibrium configuration modes, control surfaces,and gust in equation (20). Mqq is the mass matrix expressedwithM in equation (9),Mqδ is the mass matrix coupled withstructural modes and control surface modes, CqT is thedamping matrix, and KqT is the tangent stiffness matrixexpressed with KT in equation (7).
By applying the Laplace transformation to equation (22),the open-loop aeroelastic system with gust excitation can beexpressed in the following state-space form:
q
q
xa
0 I 0
M−1q KT M−1
q CT12ρV2M−1
q D
0 EqVbR
q
q
xa
+
0 0 012ρV2M−1
q Qδ012ρVbM−1
q Qδ112ρb2M−1
δ Qδ2
0 Eδ 0
δ
δ
δ
+
0 012ρVM−1
q Qg012ρbM−1
q Qg1
0Eg
V
wg
wg
,
25
where Mq =Mqq − 1/2 ρb2QqT2 , CT = 1/2 ρVbQqT1 − CqT ,
KT = 1/2 ρV2QqT0 − KqT , and Mδ = 1/2 ρb2Qδ2 −Mqδ . xais the aerodynamic lag state. To eliminate the coefficientassociated with the second-order derivative of the gust veloc-ity, we use
xa =VbRxa + Eqq + Eδδ + Eg
wg
V, 26
The output can be expressed as follows:
y = ΦM−1q KT ΦM−1
q CT12ρV2ΦM−1
q D
q
q
xa
+ 12ρV2ΦM−1
q Qδ012ρVbΦM−1
q Qδ112ρb2ΦM−1
δ Qδ2
+ 12ρVΦM−1
q Qg012ρbΦM−1
q Qg1
wg
wg
,
27
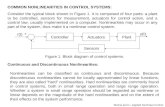
The procedure of synthesized modeling can be seen inFigure 3. Nonlinear static aeroelastic analysis is implemented
first. Then, the static equilibrium state would be obtainedusing the structural ROM and nonplanar vortex latticemethod (VLM) [35]. Under this deformed configuration,quasimodes around the equilibrium state are solved by thelinearization of the structural ROM. The state-space equationfor gust analysis can be generated by coupling with quasi-modes and unsteady aerodynamic influence coefficients.
2.5. Active Control Strategy. Based on the state-space modelestablished in Section 2.4, the control law to alleviate gustloads would be designed in the time domain. The diagramof the control system of the GLA of a flexible wing is shownin Figure 4.
An aileron with an RC model servo is settled. A servocan be activated by a pwm signal generated from a micro-control unit (MCU) through A/pwm translation from thecontrol computer. The vertical acceleration measured is fedback to the servo as a signal with a proportional-integral-derivative (PID) control algorithm. On the feedback route,the vertical acceleration passes through a first-order low-pass filter which improves the quality of the sensor signaland then is sent to a PID controller to obtain an external sig-nal used to alleviate gust response loads. One degree deflec-tion of the servo corresponds to one volt of control voltage.
The reduction rate is given as follows:
η =aopen − aclose
aopen× 100%, 28
where aopen is the open-loop response peak value and aclose isthe close-loop response peak value.
3. Wing Model and Wind Tunnel Test System
Wind tunnel tests are carried out to study the gustresponse of a flexible wing and to verify the active gustload alleviation techniques. All tests of the flexible wingmodel are performed in an FD-09 low-speed wind tunnelwhich is 12m long, 3m high, and 3m wide in a close testenvironment. Velocity from 10m/s to 100m/s can be per-formed in the wind tunnel, and the test velocity needed isfrom 25m/s to 45m/s. The maximum test velocity of45m/s corresponds to a Reynolds number per meters ofabout 3.1 million. The turbulence coefficient of the windtunnel is lower than 0.1%.
3.1. Wing Model. The flexible wing model designed in thewind tunnel test is shown in Figure 5 and Figure 6. Its designparameters are shown in Table 1.
A gradually varied cross section has been chosen forthe beam simulation of the wing. The beam is located atthe 40% chord line of the wing, and the dimensions ofthe cross section decreases from the root to the tip ofthe wing. The dimensions of the root section and tip sec-tion are given in Table 2. The density of the beam mate-rials is 2 71 × 103 kg/m3, and the module is 70Gpa. Thewing frame includes 11 light wood boxes and the gapbetween the boxes is about 2mm. The box is connectedto the main beam by a single point, and the skin of the
7International Journal of Aerospace Engineering

model is tissue paper just as a shape contour. As a result,the influence of the stiffness coming from the wing boxhas been reduced to the lowest.
The aileron prepared for the analysis and wind tunnel testis located 804.5mm from the root of the wing. The area of thecontrol surface is 16,800mm2, and theaverage chord is 40mm.
The main linear modes of the wing model before ROM ispresented in Table 3. It can be seen that the frequencies of thefirst two modes are low, which means that the flexibility ofthe model is high.
3.2. Design of Wind Tunnel Test Subsystem
3.2.1. Support System. The wing model is vertically fixed inthe wind tunnel with a lamped root. The angle of attack(AOA) which is related to the undeformed wing model canbe changed from 0deg to 5 deg. At the joint between the sup-port system and the wing model, a force balance measuresthe force and moments in six directions.
3.2.2. Gust Generator. A gust generator is applied to createthe expected gust disturbance during the tunnel test. Two
Aerodynamicmodeling
Initial structuremodel & aerodynamic
model
Nonlinear VLMcomputation
Nonlinearstructural ROM
Convergence
Deformedconfiguration
quasimodal analysis
Aerodynamic modelupdate
Unsteadyaerodynamic
influencecoefficient
Servomodeling
Servo modes
State-space equation
Yes
No
Dynamiclinearization
Figure 3: Procedure of synthesized modeling [32].
Flexible wing
Gust Gust load
Acceleration response
SensorControlsystemMicroservo
Figure 4: GLA control system diagram [32].
8 International Journal of Aerospace Engineering

rectangular blades deflect sinusoidally and synchronously.The span length of the blades is 2000mm and the chordlength of the blades is 300mm. The distance between twoblades is 600mm, and the distance from the model and thegenerator is 2000mm. The airfoil of the blades is NACA0015.The deflecting angle range of the blades is -7 deg to 7 deg, andthe deflecting frequency is 1-7Hz. The gust generator in thewind tunnel is shown in Figure 7.
When the blades are deflected sinusoidally at a certainfrequency, an approximately sinusoidal lateral gust can begenerated in the test field, and the gust velocity can be writtenas follows:
wg t = Agam sin 2πf t , 29
where am is the amplitude of the blade deflecting angle, andAg is the gust disturbance coefficient which is relevant tothe velocity V and the blade deflecting frequency f .
3.2.3. Measure-Control System. A measure-control systemis required to contain GLA in a wind tunnel test, asshown in Figure 8. During the test, the GLA control loop
X
Z
Y
(a) 3-D CATIA model (b) FEM model
Figure 5: Model of a very flexible wing [32].
Figure 6: Wind tunnel test model of a very flexible model [32].
Table 1: Design parameters of the wing model [32].
Item Value
Span (mm) 1542.0
Weight (kg) 2.82
Root chord (mm) 261.0
Tip chord (mm) 69.0
Airfoil Supercritical airfoil SC(2)-0712
Aspect ratio 9.3
Taper ratio 3.8
Torsion angle (deg) -2.0
Table 2: Dimensions of beam section [32].
Parameters Root section Tip section Dimension
w mm 21.0 7.4
w2
t 2
t1
H
t1 mm 5.5 3.1
H mm 21.0 6.9
t2 mm 5.9 3.4
Table 3: Modes of the wing model [32].
Mode Description Frequency (Hz) Modal stiffness
1 1st bending 5.32 1 1162E + 03
2 1st chordwise bending 8.01 2 5304E + 03
3 2nd bending 12.93 6 5935E + 03
4 2nd chordwise bending 22.26 1 9542E + 04
5 3rd bending 35.28 4 9088E + 04
6 1st torsion 51.51 1 0464E + 05
Figure 7: Gust generator in wind tunnel [32].
9International Journal of Aerospace Engineering

can be switched on and off in order to validate the effectof the GLA system. Due to the particularity of using theRC model servo, the MCU needs to translate the analogsignal and pwm signal. Figure 9 shows the parts of thehardware devices used in the wind tunnel test. The accel-erometer we chose is an ADXL345 located at about 33%of the span from the wing tip.
3.3. Frequency Sweep Test of Servo. Because the servo wechose cannot output its deflection directly, we use a laser ran-gefinder to measure the vertical displacement of a point on
Flexible wingSinusoidal gust
Acceleration
Accelerometer
Bending moment
Strain
Low-passfilter A/D
D/A
Controlsystem
Data acquisition (DAQ) Control computer
Strain gaugeMonitor computer
MCU
A/pwm
Servo
Figure 8: Measure-control system diagram in a wind tunnel test [32].
RC servomodel
Accelerometer
(a) Accelerometer and servo (b) MCU for servo
Figure 9: Parts of hardware devices in a wind tunnel test [32].
Laser rangefinder
Laser point
Figure 10: Frequency sweep test of servo [32]. 0 10 20 30 40 50
−15
−10
−5
0
5
10
15
20
25
Defl
ectio
n of
aile
ron
(deg
)
Time (s)Signal inputTest output
Figure 11: Frequency sweep time domain response result.
10 International Journal of Aerospace Engineering

the rudder, then we calculate the angle of deflection of theservo from that vertical displacement. Figure 10 shows thefrequency sweep test of the RC model servo [32].
The frequency range is 0-6Hz in a sweep test, and adeflection of 14.4 deg is given to the RC model servo witha pwm signal. The time domain result is given in Figure 11.The black curve is a deflection signal input, and the redcurve is a deflection signal output. It can be seen thatthe dynamic response characteristics of the RC modelservo became worse with the increase of frequency. Thereason is that the RC model servo is usually used for thestatic control of an RC model airplane. The frequency-domain result is given in Figure 12. The black curvedescribes the derivation of the deflection input and deflec-tion output in gain and phase. The red curve with a circleis the fit curve of the transfer function. It can be seen that
the lagging derivation of the phase can be nearly 150 degwhen the frequency is close to 6Hz.
The transfer function of the servo in an aileron is asfollows:
−0 4376s2 + 32 67s − 1790s2 + 76 03s + 2237
, 30
where s is the Laplace variable.
4. Theoretical Analysis and Wind TunnelTest Results
4.1. Validation of Nonlinear ROM. A nonlinear ROM hasbeen obtained by regression analysis from test load cases cho-sen before and from corresponding deformations. The vali-dation of the nonlinear ROM calculation from a structural
0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 5.5 6.0 6.5
0.55
0.60
0.65
0.70
0.75
0.80
0.85G
ain
Frequency (Hz)
Test dataDerived curve
(a) Gain
0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 5.5 6.0 6.5−160
−140
−120
−100
−80
−60
−40
Phas
e (de
g)
Frequency (Hz)
Test dataDerived curve
(b) Phase
Figure 12: Frequency sweep test result and fit curve.
Table 4: Regression procedure of the 1st bending mode equation.
Step Terms Status RMSE
1 q31 In 12.4268
2 q21 In 3.3776
3 q34 In 0.2557
4 q32 In 0.1256
5 q2q24 In 0.1148
6 q22q4 In 0.1095
7 q24q6 In 0.0970
8 q24q7 In 0.0694
9 q33 In 0.0620
10 q21 Out 0.0598
11 q24q7 Out 0.0596
Aerodynamic load
Transform in modalspace
Nonlinear ROM solution
Modal displacement
Transform in physicalspace
Nonlinear FEM solution
Displacement in physicalspace
Validate
Figure 13: Validation procedure.
11International Journal of Aerospace Engineering

equation must be established. Then, ROM can be applied tostatic and response analysis reasonably. The numbers of non-linear stiffness coefficients are less than 10 by stepwise regres-sion procedure. The regression procedure of the equationcorresponding to the 1st bending mode as an example is pre-sented in Table 4. Modal coordinates from q1 to q7 stand forthe 1st bending mode, 2nd bending mode, 1st chordwisebending mode, 1st torsion mode, 2nd torsion mode, 1st span-wise mode, and 2nd spanwise mode in that order. There are11 steps included in the operation, where 9 terms were intro-duced and 2 terms were removed with a decreasing rootmean squared error (RMSE). The final equation has 9 non-linear stiffness coefficients.
The validation procedure is illustrated in Figure 13. Thenonlinear FEM analysis is completed in MSC.NASTRAN.The module SOL 106 is used for static nonlinear FEM analy-sis, and the module SOL 400 is used for dynamic nonlinearFEM analysis. The FEM model has 339 CBEAM elements,and it is presented in Figure 5.
4.1.1. Static Validation with Nonlinear FEM. In static valida-tion of nonlinear ROM with the data from nonlinear FEM,we take 50 sets of a growing validation load as exampleswhich all have a distribution of the actual aerodynamic load.The displacement of a wing tip under these sets of validationloads is presented in Figure 14(a). The choice of validation
0 10 20 30 40 50−0.050
−0.025
0.000
0.025
0.050
0.075
0.100
0.125
0.150
0.175
0.200
0.225
0.250
Disp
lace
men
t of w
ing
tip (m
m)
Serial number of validation cases
Spanwise directionVertical direction
(a) Displacement of a wing tip
0 10 20 30 40 500.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
2.0
Rela
tive d
evia
tion
(%)
Serial number of validation cases
Spanwise direction Flapwise direction
(b) Relative deviation between FEM and ROM
Figure 14: Displacement of a wing tip under validation loads.
12 International Journal of Aerospace Engineering

loads makes the vertical displacement of a wing tip within therange of 10% to 25%, which is in the demand of nonlinearanalysis. Spanwise displacement of a wing tip is also consid-ered. It is important in geometric nonlinear aeroelastic anal-ysis, since it will change aerodynamic distribution.
The calculation results of those 50 cases are shown inFigure 14(b) along with a comparison of ROM solutionsand FEM solutions. Here, the black line with a circle repre-sents the relative deviation of a wing tip vertical displacementand the red line with a rectangle represents the relative devi-ation of a wing tip spanwise displacement. It can be seen thatthe relative deviation between ROM solutions and nonlinearFEM solutions under these validation loads are no greaterthan 1%. ROM solutions can reach good agreement withnonlinear FEM solutions.
4.1.2. Dynamic Response Validation with Nonlinear FEM.In the dynamic response verification of nonlinear ROMwith the data from nonlinear FEM, two load cases areset for comparison.
Case 1. A 0.5N follower force is applied at the tip of thebeam in the vertical direction as a step input at the initialtime.
Case 2. A set of follower forces has the distribution of anactual aerodynamic load as a step input at the initialtime; the load can make a vertical deflection nearly 20%the length of the span.
A comparison of the FEM solution results and the ROMsolution results is shown in Figure 15 and Figure 16. Nonlin-ear ROM solution results in both the vertical deflection andspanwise deflection under Case 1 and Case 2 coincide with
nonlinear FEM solution results. The structural ROM isreliable.
4.2. Static Deformation and Flutter Analysis. Before the gustresponse and GLA analysis, nonlinear aeroelastic stabledeformation and flutter speed are calculated. The nonlinearanalysis used nonplanar VLM and nonplanar DLM coupledwith structural ROM. As described before, the stiffness ofthe structure has a relationship with large deformationswhich will have a big influence on gust analysis. All themethods implemented are self-programmed.
Figure 17 shows the nonlinear static aeroelastic analysisresults of a wing model under 4 deg AOA. The vertical deflec-tion of a wing tip grows with the increase of velocity with anonlinear trend. The vertical deflection of a wing tip reaches615mm, nearly 40% of the wingspan, which is a large defor-mation. Meanwhile, the spanwise deflections are comparablewith the vertical deflections, which are not reflected in thelinear analysis.
The distributions of lift, drag, and side force under thestatic aeroelastic equilibrium state with 3 deg AOA and4deg AOA in 37m/s velocity are presented in Figure 18. Itis obvious that there are differences between consideringand not considering spanwise displacement. The total lifthas 10% and 7.5% overall errors for the 4 deg AOA conditionand the 3 deg AOA condition, respectively, which is com-puted as follows:
δ =Sspan − Snospan
Sspan, 31
where Sspan is the total lift of the condition with spanwise dis-placement and Snospan is the total lift of the condition withoutspanwise displacement. The lifting surfaces are shown in
−0.5 0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 5.5−20
020406080
100120140160180200220240260280300320
Ver
tical
defl
ectio
n (m
m)
Time (s)FEM solutionsROM solutions
(a) Vertical deflection
−0.5 0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 5.5−30−28−26−24−22−20−18−16−14−12−10−8−6−4−2
0246
Span
wise
defl
ectio
n (m
m)
Time (s)FEM solutionsROM solutions
(b) Spanwise deflection
Figure 15: Response of the wing model under Case 1.
13International Journal of Aerospace Engineering

Figure 19. The red one is the lifting surface with spanwise dis-placement and the blue one is the lifting surface withoutspanwise displacement.
Quasimode frequencies change a lot with growing defor-mation. Figure 20 shows the changing of the first six ordermode frequencies with velocity variations from 25m/s to43m/s under 2 deg AOA. It can be seen that the first fivemode frequencies decrease as the velocity increases; mean-while, the deformations of the wing also increase. The 2ndorder mode frequency decreases nearly 12%, which is the
1st chordwise bending mode in the linear analysis. In nonlin-ear aeroelastic analysis, the chordwise bending mode plays animportant role caused by the geometric nonlinear effect asshown by Frulla et al. [5, 6].
In linear flutter analysis of this wing model, it is a typicalbend twist coupling flutter with a flutter speed of 70.2m/s. Itis not interrelated with structure deformation. The nonlinearflutter speed has a correlation with the structure deformationdescribed above. The flutter speed is 57.5m/s in a nonlinearflutter analysis under 2 deg AOA in tune with the quasimode
700
600
500
400
300
200
Ver
tical
defl
ectio
n of
win
g tip
(mm
)
100
024 26 28 30 32 34
Velocity (m/s)36 38 40 42 44
2 deg3 deg4 deg
(a) Vertical deflection
Span
wise
defl
ectio
n of
win
g tip
(mm
)
−200
−150
−100
−50
0
24 26 28 30 32 34Velocity (m/s)
36 38 40 42 44
2 deg3 deg4 deg
(b) Spanwise deflection
Figure 17: Static aeroelastic deformation results.
−0.5 0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 5.5−25
0255075
100125150175200225250275300325350375400
Ver
tical
defl
ectio
n (m
m)
Time (s)FEM solutions ROM solutions
(a) Vertical deflection
−0.5 0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 5.5−45
−40
−35
−30
−25
−20
−15
−10
−5
0
5
10
Span
wise
defl
ectio
n (m
m)
Time (s)
FEM solutionsROM solutions
(b) Spanwise deflection
Figure 16: Response of the wing model under Case 2.
14 International Journal of Aerospace Engineering

frequency analysis condition. Coupling modes have changedto the bending mode and the chordwise bending mode. Thechordwise bending mode may be significant in nonlinearflutter analysis.
4.3. Gust Response Analysis and Test Results. Both the gustresponse analysis simulation results and the wind tunnel testresults are presented and compared to illustrate the consis-tency. Acceleration responses in the test were obtained froman ADXL345 accelerometer. Root bending moments in thetest were obtained from the force balance measures fixed onthe support system. Figure 21 and Figure 22 show the com-parison between the simulation and test results correspond-ing to the vertical acceleration and root bending moment.The results presented are peak values of frequency domain
0 200 400 600 800 1000 1200 1400 1600500
750
1000
1250
1500
1750
2000
2250
2500
2750
3000Li
� (m
N)
Wingspan (mm)4 deg without spanwisedisplacement4 deg with spanwisedisplacement
3 deg without spanwisedisplacement3 deg with spanwisedisplacement
(a) Lift
0 200 400 600 800 1000 1200 1400 1600−200
−180
−160
−140
−120
−100
−80
−60
−40
Dra
g (m
N)
Wingspan (mm)4 deg without spanwisedisplacement4 deg with spanwisedisplacement
3 deg without spanwisedisplacement3 deg with spanwisedisplacement
(b) Drag
0 200 400 600 800 1000 1200 1400 1600−1200−1100−1000−900−800−700−600−500−400−300−200−100
0100
Side
forc
e (m
N)
Wingspan (mm)
4 deg without spanwisedisplacement4 deg with spanwisedisplacement
3 deg without spanwisedisplacement3 deg with spanwisedisplacement
(c) Side force
Figure 18: Distribution of lift, drag, and side force.
z
y
x
Figure 19: Comparison of lifting surfaces.
15International Journal of Aerospace Engineering

analysis. Most of the test results reach agreement with thesimulation results. The instability of the sensors may bringout bad data in the wind tunnel test. However, the tendenciesof the simulation results are obvious. Because the frequenciesof the gusts in the test did not reach the first mode frequencyof the wing model, the acceleration and root bending
moment grew with the increase of velocity and frequency.It can be said that the theoretical method is valid.
4.4. Gust Load Alleviation Analysis and Test Results. Two setsof conditions have been given as examples to present GLAresults under 2 deg AOA with velocities of 28m/s and
−5 0 5 10 15 20 25 30 35 40 45 50
0.88
0.90
0.92
0.94
0.96
0.98
1.00
1.02
1.04
1.06
1.08
Qua
simod
e fre
quen
cy/li
near
mod
e fre
quen
cy
Velocity (m/s)Mode 1Mode 2Mode 3
Mode 4Mode 5Mode 6
Figure 20: Variation of the first six order quasimode frequencies.
28 30 32 34 36 38 40
10
20
30
40
50
60
Acc
eler
atio
n re
spon
se (m
/s2 )
Velocity (m/s)
2.8 Hz test results3.2 Hz test results3.6 Hz test results4.0 Hz test results4.4 Hz test results
2.8 Hz simulation results3.2 Hz simulation results3.6 Hz simulation results4.0 Hz simulation results4.4 Hz simulation results
Figure 21: Acceleration response in gust response analysis and wind tunnel test.
16 International Journal of Aerospace Engineering

31m/s. Figure 23 shows the simulation results in the fre-quency domain under velocity conditions of 28m/s and31m/s, including both open-loop and close-loop results. Itcan be seen that acceleration alleviation and root bendingmoment alleviation are valid under the low-frequency condi-tions with reduction rates of over 35%. As the frequencygrows, reduction rates evidently decrease. When the fre-quency reaches 4.4Hz, the control system is almost ineffec-tive. The main reason is that the RC model servo we used
has a large lagging of phase and decaying of amplitude. Thesame situation comes to the wind tunnel test results.Figure 24 shows the wind tunnel test results in the frequencydomain under the velocity conditions of 28m/s and 31m/s.The control system is valid when the frequency is kept underlow frequencies. But if the frequency increases, the effective-ness of control system is quickly lost. This will be more obvi-ous in test results. Moreover, the signal of the smallADXL345 accelerometer would have heavy noises in the
28 30 32 34 36 38 400.5
0.6
0.7
0.8
0.9
1.0
1.1
1.2
1.3
Bend
ing
mom
ent r
espo
nse (
kg·m
)
Velocity (m/s)
2.8 Hz test results3.2 Hz test results3.6 Hz test results4.0 Hz test results4.4 Hz test results
2.8 Hz simulation results3.2 Hz simulation results3.6 Hz simulation results4.0 Hz simulation results4.4 Hz simulation results
Figure 22: Bending moment response in gust response analysis and wind tunnel test.
2.6 2.8 3.0 3.2 3.4 3.6 3.8 4.0 4.2 4.4 4.60
5
10
15
20
25
30
35
40
Acc
eler
atio
n re
spon
se (m
/s2 )
Frequency (Hz)
28 m/s open loop28 m/s close loop
31 m/s open loop31 m/s close loop
(a) Acceleration response
28 m/s open loop28 m/s close loop
31 m/s open loop31 m/s close loop
2.6 2.8 3.0 3.2 3.4 3.6 3.8 4.0 4.2 4.4 4.6
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Bend
ing
mom
ent r
espo
nse (
kg·m
)
Frequency (Hz)
(b) Bending moment response
Figure 23: GLA results of simulation under 2 deg AOA with velocities of 28m/s and 31m/s.
17International Journal of Aerospace Engineering

2.8Hz test condition which leads to the small rate of reduc-tion. This situation would not occur in theoretical simulationcalculations. Table 5 presents the alleviation efficacy with thereduction rate.
5. Conclusions
In this paper, an effective method for gust response analysisand GLA analysis of a flexible wing including geometricnonlinearities was performed. A nonlinear structural ROMand nonplanar aerodynamic calculation with the linearizedsystem under a static equilibrium state is applied for gustresponse and alleviation solving.
The structural modeling method describes the geometricnonlinear stiffness coefficient in an equation with quadraticand cubic terms of a linear modal function. Two orthogonalspanwise modes are used to capture the foreshorteningeffects, and the spanwise deflection can be solved directly.
The influence of the foreshortening effects in an aerodynamiccalculation has been discussed. Stepwise regression ensuresthe accuracy of nonlinear stiffness identification, and fol-lower force effect is also considered.
The linearized formulation of structural ROM is given,and a framework of gust response analysis and GLA isderived based on linearized structural ROM and nonplanarDLM. A wing model for the validation of this method wasdesigned, and a wind tunnel test was carried out successfully.An acceleration feedback control strategy with PID control-lers is used to realize alleviation. We used an RC model servoin our first attempt in the wind tunnel test. This would serveas a guide for applications of this kind or those using a servoin a wind tunnel test or a flight test.
Gust response analysis shows that most of the test resultsreach agreement with the simulation results. The accelerationand root bending moment grew with the increase of veloci-ties and frequencies. The method described is valid. In GLAanalysis and in the wind tunnel test, the reduction rate ofvertical acceleration and root bending moment could bemore than 20% with lower frequencies. When the frequencyreaches a higher value, the alleviation efficacy will seriouslydecrease due to a defect of the dynamic response characteris-tics of the RC model servo. This is important to consider insimilar tests or flight tests. Using this actuator gives the con-trol and test foundation of our upcoming geometric nonlin-ear aeroelastic flight test with a lightweight airplane modelwhich cannot afford a fin actuator. A small ADXL345 accel-erometer is chosen for the same reason. The alleviation tech-nology described in this paper is validated.
Data Availability
The simulation results and wind tunnel test results data usedto support the findings of this study are available from thecorresponding author upon request.
2.6 2.8 3.0 3.2 3.4 3.6 3.8 4.0 4.2 4.4 4.65
10
15
20
25
30
35
40A
ccel
erat
ion
resp
onse
(m/s
2 )
Frequency (Hz)28 m/s open loop28 m/s close loop
31 m/s open loop31 m/s close loop
(a) Acceleration response
2.5 3.0 3.5 4.0 4.50.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
1.1
1.2
Bend
ing
mom
ent r
espo
nse (
kg·m
)
Frequency (Hz)28 m/s open loop28 m/s close loop
31 m/s open loop31 m/s close loop
(b) Bending moment response
Figure 24: GLA results of wind tunnel test under 2 deg AOA with velocities of 28m/s and 31m/s.
Table 5: Reduction rate of acceleration and bending moment [32].
Velocity(m/s)
Gustfrequency
(Hz)
Reduction rate ofacceleration
Reduction rate ofbending moment
28 2.8 16.9% 15.3%
28 3.2 37.5% 35.9%
28 3.6 37.2% 34.4%
28 4.0 17.4% 13.8%
28 4.4 -18.1% -24.9%
31 2.8 17.3% 15.2%
31 3.2 25.8% 23.3%
31 3.6 21.1% 17.7%
31 4.0 19.4% 16.1%
31 4.4 -9.4% -17.8%
18 International Journal of Aerospace Engineering

Conflicts of Interest
The authors declare that they have no conflicts of interest.
Acknowledgments
The study was supported by the National Key Research andDevelopment Program (2016YFB 0200703).
References
[1] M. J. Patil and D. H. Hodges, “On the importance of aerody-namics and structural geometrical nonlinearities in aeroelasticbehavior of high-aspect-ratio wings,” in 41st AIAA/ASME/AS-CE/AHS/ASC Structures, Structural Dynamics, and MaterialConference and Exhibit, Atlanta, GA, USA, April 2000.
[2] M. J. Patil, Nonlinear Aeroelastic Analysis, Flight Dynamics,and Control of a Complete Aircraft, Georgia Institute of Tech-nology, Atlanta, GA, USA, 1999.
[3] M. J. Patil, D. H. Hodges, and C. E. S. Cesnik, “Nonlinearaeroelasticity and flight dynamics of high-altitude long-endurance aircraft,” Journal of Aircraft, vol. 38, no. 1,pp. 88–94, 2001.
[4] D. M. Tang and E. H. Dowell, “Experimental and theoreticalstudy on aeroelastic response of high-aspect-ratio wings,”AIAA Journal, vol. 39, no. 8, pp. 1430–1441, 2001.
[5] G. Frulla, “Aeroelastic behaviour of a solar-powered high-altitude long endurance unmanned air vehicle (Hale-UAV)slender wing,” Proceedings of the Institution of MechanicalEngineers, Part G: Journal of Aerospace Engineering, vol. 218,no. 3, pp. 179–188, 2004.
[6] G. Frulla, E. Cestino, and P. Marzocca, “Critical behaviour ofslender wing configurations,” Proceedings of the Institution ofMechanical Engineers, Part G: Journal of Aerospace Engineer-ing, vol. 224, no. 5, pp. 587–600, 2009.
[7] L. K. Abbas, Q. Chen, P. Marzocca, and A. Milanese, “Non-lin-ear aeroelastic investigations of store(s)-induced limit cycleoscillations,” Proceedings of the Institution of Mechanical Engi-neers, Part G: Journal of Aerospace Engineering, vol. 222, no. 1,pp. 63–80, 2008.
[8] Z. Jian and X. Jinwu, “Nonlinear aeroelastic response of high-aspect-ratio flexible wings,” Chinese Journal of Aeronautics,vol. 22, no. 4, pp. 355–363, 2009.
[9] C. C. Xie and C. Yang, “Linearization method of nonlinearaeroelastic stability for complete aircraft with high-aspect-ratio wings,” Science China Technological Sciences, vol. 54,no. 2, pp. 403–411, 2011.
[10] W. Su and C. E. S. Cesnik, “Dynamic response of highlyflexible flying wings,” in 47th AIAA/ASME/ASCE/AHS/ASCStructures, Structural Dynamics, and Materials Conference,Structures, Structural Dynamics, and Materials and Co-located Conferences, pp. 412–435, Newport, Rhode Island,May 2006.
[11] D. Guo, M. Xu, and S. L. Chen, “Nonlinear gust response anal-ysis of free flexible aircraft,” International Journal of IntelligentSystems and Applications, vol. 5, no. 2, pp. 1–15, 2013.
[12] Z.Wang, P. Chen, D. Liu, and D.Mook, “Nonlinear aeroelasticanalysis for a HALE wing including effects of gust and flowseparation,” in 48th AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics, and Materials Conference, Honolulu,Hawaii, April 2007.
[13] Y. Liu, C. C. Xie, C. Yang, and J. L. Cheng, “Gust responseanalysis and wind tunnel test for a high-aspect ratio wing,”Chinese Journal of Aeronautics, vol. 29, no. 1, pp. 91–103,2016.
[14] M. J. Dillsaver, C. E. S. Cesnik, and I. V. Kolmanovsky, “Gustload alleviation control for very flexible aircraft,” in AIAAAtmospheric Flight Mechanics Conference, Guidance, Naviga-tion, and Control and Co-located Conferences, pp. 1–18,Portland, OR, USA, August 2011.
[15] R. G. Cook, R. Palacios, and P. Goulart, “Robust gust allevia-tion and stabilization of very flexible aircraft,” AIAA Journal,vol. 51, no. 2, pp. 330–340, 2013.
[16] R. Wang, X. P. Zhu, and Z. Zhou, “Design gust alleviationcontroller for highly flexible solar UAV,” in 2011 ThirdInternational Conference on Measuring Technology andMechatronics Automation, pp. 930–933, Shangshai, China,January 2011.
[17] S. Ricci, A. De Gaspari, L. Riccobene, and F. Fonte, “Designand wind tunnel test validation of gust load alleviation sys-tems,” in 58th AIAA/ASCE/AHS/ASC Structures, StructuralDynamics, and Materials Conference, Grapevine, TX, USA,January 2017.
[18] T. J. Allen, B. W. Sexton, and J. S. Matthew, “SUGAR trussbraced wing full scale aeroelastic analysis and dynamicallyscaled wind tunnel model development,” in 56th AIAA/AS-CE/AHS/ASC Structures, Structural Dynamics, and MaterialsConference, Kissimmee, FL, USA, January 2015.
[19] C. C. Xie, Y. Liu, and C. Yang, “Static aeroelastic analysis ofvery flexible wing based on the 3-d lifting-line theory,” in53rd AIAA/ASME/ASCE/AHS/ASC Structures, StructuralDynamics and Materials Conference, Honululu, Hawaii, April2012.
[20] W. Zhao, R. K. Kapania, J. A. Schetz, J. M. Coggin, T. J. Allen,and B. W. Sexton, “Nonlinear aeroelastic analysis of SUGARtruss-braced wing (TBW) wind-tunnel model (WTM) underin-plane loads,” in 56th AIAA/ASCE/AHS/ASC Strcutures,Structural Dynamics, and Materials Conference, Kissimmee,FL, USA, January 2015.
[21] D. H. Hodges, “A mixed variational formulation based onexact intrinsic equations for dynamics of moving beams,”International Journal of Solids and Structures, vol. 26, no. 11,pp. 1253–1273, 1990.
[22] R. Palacios and C. E. S. Cesnik, “Low-speed aeroelastic model-ing of very flexible slender wings with deformable airfoils,” in49th AIAA/ASME/ASCE/AHS/ASC Structures, StructuralDynamics, and Materials Conference, Schaumburg, IL, USA,April 2008.
[23] W. R. Kruger, “Multibody dynamics for the coupling of aero-elasticity and flight mechanics of highly flexible structures,”in International Forum on Aeroelasticity and StructuralDynamics, Stockholm, Sweden, June 2007.
[24] Z. Zhao and G. Ren, “Multibody dynamic approach of flightdynamics and nonlinear aeroelasticity of flexible aircraft,”AIAA Journal, vol. 49, no. 1, pp. 41–54, 2011.
[25] C. Howcroft, R. Cook, D. Calderon et al., “Aeroelastic model-ling of highly flexible wings,” in 15th Dynamics Specialist Con-ference, San Diego, CA, USA, January 2016.
[26] M. P. Mignolet and C. Soize, “Stochastic reduced order modelsfor uncertain geometrically nonlinear dynamical systems,”Computer Methods in Applied Mechanics and Engineering,vol. 197, no. 45-48, pp. 3951–3963, 2008.
19International Journal of Aerospace Engineering

[27] M. I. McEwan, J. R. Wright, J. E. Cooper, and A. Y. T. Leung,“A combined modal/finite element analysis technique for thedynamic response of a nonlinear beam to harmonic excita-tion,” Journal of Sound and Vibration, vol. 243, no. 4,pp. 601–624, 2001.
[28] J. J. Hollkamp and R. W. Gordon, “Reduced-order models fornonlinear response prediction: implicit condensation andexpansion,” Journal of Sound and Vibration, vol. 318, no. 4-5, pp. 1139–1153, 2008.
[29] M. Y. Harmin and J. E. Cooper, “Aeroelastic behaviour of awing including geometric nonlinearities,” The AeronauticalJournal, vol. 115, no. 1174, pp. 767–777, 2011.
[30] E. Cestino, G. Frulla, and P. Marzocca, “A reduced ordermodel for the aeroelastic analysis of flexible wings,” SAE Inter-national Journal of Aerospace, vol. 6, no. 2, pp. 447–458, 2013.
[31] K. Kim, V. Khanna, X. Q. Wang, andM. P. Mignolet, “Nonlin-ear reduced order modeling of flat cantilevered structure,” in50th AIAA/ASME/ASCE/AHS/ASC Structures, StructuralDynamics, and Materials Conference, Structures, StructuralDynamics, and Materials and Co-located Conferences, PalmSprings, CA, USA, May 2009.
[32] C. An, C. C. Xie, Y. Meng, and C. Yang, “Wind tunnel test andgust load alleviation of flexible wing including geometric non-linearities with servo control,” in 2018 AIAA/ASME/AS-CE/AHS/ASC Structures, Structural Dynamics, and MaterialsConference, Kissimmee, FL, USA, January 2018.
[33] P. T. Pope and J. T. Webster, “The use of an F-statistic in step-wise regression procedures,” Technometrics, vol. 14, no. 2,pp. 327–340, 1972.
[34] C. C. Xie, Y. Liu, C. Yang, and J. E. Cooper, “Geometricallynonlinear aeroelastic stability analysis and wind tunnel testvalidation of a very flexible wing,” Shock and Vibration,vol. 2016, Article ID 5090719, 17 pages, 2016.
[35] C. C. Xie, C. An, Y. Liu, and C. Yang, “Static aeroelasticanalysis including geometric nonlinearities based on reducedorder model,” Chinese Journal of Aeronautics, vol. 30, no. 2,pp. 638–650, 2017.
20 International Journal of Aerospace Engineering

International Journal of
AerospaceEngineeringHindawiwww.hindawi.com Volume 2018
RoboticsJournal of
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Shock and Vibration
Hindawiwww.hindawi.com Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwww.hindawi.com
Volume 2018
Hindawi Publishing Corporation http://www.hindawi.com Volume 2013Hindawiwww.hindawi.com
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwww.hindawi.com Volume 2018
International Journal of
RotatingMachinery
Hindawiwww.hindawi.com Volume 2018
Modelling &Simulationin EngineeringHindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Navigation and Observation
International Journal of
Hindawi
www.hindawi.com Volume 2018
Advances in
Multimedia
Submit your manuscripts atwww.hindawi.com