DYNAMICS CONTROL AND DH PARAMETRIZATION OF · PDF fileDenavit-Hartenberg notation (Fig.1) is...
13
ELK ASIA PACIFIC JOURNAL OF MECHANICAL ENGINEERING RRESEARCH ISSN 2394-9368 (Online); EAPJMER/issn. 2394-9368/2016; Volume 2 Issue 2 (2016) www.elkjournals.com ……………………………………………………………………………………………… DYNAMICS CONTROL AND DH PARAMETRIZATION OF ARISTO XT 6-AXIS ROBOT USING ROBOANALYZER Saurabh Chandra Dept. of Mechanical Engineering SRMSCET Bareilly, India [email protected] Mohd Mujahid Khan Jamia Milia Islamia New Delhi Vijay Kumar Dept. of Mechanical Engineering, SRMSCET Bareilly, India ABSTRACT Robotic Manipulators are the heart of modern industries and to be seen externally as well in our daily usage. Robotics is the interdisciplinary advent of all engineering technologies .In this paper; there is a method that will find the end- effectors DH parameter table as per the need of work envelope. For this purpose, we are using Robo Analyzer (Software developed by Prof. S. K. Saha, IIT Delhi). There are such other software’s that can control the movement of a robotic manipulators but Robo Analyzer is a gem for robotic simulation. In Robo Analyzer, the end-effector DH table can be easily generated. This DH table gives the values that are analytically derived as per the principles of DH Parametrization. Further, this paper will describe the real time working space simulation of robotic manipulators. The chief advantage of using this software is that simulation task can be performed under exact conditions as they are in real time. In this type of Robot simulation, point to point control of robot takes place. Keywords— DH Parameters, Forward and Inverse Kinematics, Serial Multi-body Dynamics, Robot Enclosed Motion, Workspace Simulation. INTRODUCTION Denavit-Hartenberg notation (Fig.1) is widely used in the transformation of coordinate systems of linkages and robot mechanisms [1] . It can be used to represent the transformation matrix between links as shown in the Figure Figure 1:- Denavit Hartenberg Notation
Transcript of DYNAMICS CONTROL AND DH PARAMETRIZATION OF · PDF fileDenavit-Hartenberg notation (Fig.1) is...
![Page 1: DYNAMICS CONTROL AND DH PARAMETRIZATION OF · PDF fileDenavit-Hartenberg notation (Fig.1) is widely used in the transformation of coordinate systems of linkages and robot mechanisms[1].](https://reader040.fdocuments.net/reader040/viewer/2022030407/5a8794817f8b9a882e8dbf44/html5/page/1.jpg)
ELK ASIA PACIFIC JOURNAL OF MECHANICAL ENGINEERING RRESEARCH
ISSN 2394-9368 (Online); EAPJMER/issn. 2394-9368/2016; Volume 2 Issue 2 (2016)
www.elkjournals.com
………………………………………………………………………………………………
DYNAMICS CONTROL AND DH PARAMETRIZATION OF ARISTO XT 6-AXIS
ROBOT USING ROBOANALYZER
Saurabh Chandra
Dept. of Mechanical Engineering
SRMSCET Bareilly, India
Mohd Mujahid Khan
Jamia Milia Islamia
New Delhi
Vijay Kumar
Dept. of Mechanical Engineering,
SRMSCET Bareilly, India
ABSTRACT
Robotic Manipulators are the heart of modern industries and to be seen externally as well in our daily usage. Robotics
is the interdisciplinary advent of all engineering technologies .In this paper; there is a method that will find the end-
effectors DH parameter table as per the need of work envelope. For this purpose, we are using Robo Analyzer
(Software developed by Prof. S. K. Saha, IIT Delhi). There are such other software’s that can control the movement
of a robotic manipulators but Robo Analyzer is a gem for robotic simulation. In Robo Analyzer, the end-effector DH
table can be easily generated. This DH table gives the values that are analytically derived as per the principles of DH
Parametrization. Further, this paper will describe the real time working space simulation of robotic manipulators.
The chief advantage of using this software is that simulation task can be performed under exact conditions as they are
in real time. In this type of Robot simulation, point to point control of robot takes place.
Keywords— DH Parameters, Forward and Inverse Kinematics, Serial Multi-body Dynamics, Robot Enclosed Motion,
Workspace Simulation.
INTRODUCTION
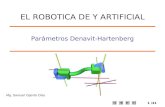
Denavit-Hartenberg notation (Fig.1) is
widely used in the transformation of
coordinate systems of linkages and robot
mechanisms [1]. It can be used to represent the
transformation matrix between links as shown
in the Figure
Figure 1:- Denavit Hartenberg Notation
![Page 2: DYNAMICS CONTROL AND DH PARAMETRIZATION OF · PDF fileDenavit-Hartenberg notation (Fig.1) is widely used in the transformation of coordinate systems of linkages and robot mechanisms[1].](https://reader040.fdocuments.net/reader040/viewer/2022030407/5a8794817f8b9a882e8dbf44/html5/page/2.jpg)
ELK ASIA PACIFIC JOURNAL OF MECHANICAL ENGINEERING RRESEARCH
ISSN 2394-9368 (Online); EAPJMER/issn. 2394-9368/2016; Volume 2 Issue 2 (2016)
………………………………………………………………………………………………
IN PREVIOUS FIGURE,
zi-1 and zi are the axes of two revolute
pairs;
θi is the included angle of axes xi-1 and xi;
di is the distance between the origin of the
coordinate system xi-1yi-1zi-1 and the foot
of the common perpendicular;
ai is the distance between two feet of the
common perpendicular;
αi is the included angle of axes zi-1 and zi;
The transformation matrix (Fig.2) will be
𝐻𝑖−0𝑖 ,𝐻𝑖−0
𝑖 =
[
𝑐𝜃𝑖 − 𝑠𝜃𝑖 0 𝑎𝑖−1
𝑠𝜃𝑐𝛼𝑖−1 𝑐𝜃𝑐𝛼𝑖−1 − 𝑠𝛼𝑖−1 − 𝑠𝛼𝑖−1𝑑𝑖
𝑐𝜃𝑠𝛼𝑖−1 𝑐𝜃𝑠𝛼𝑖−1 𝑐𝛼𝑖−1 𝑐𝛼𝑖−1𝑑𝑖
0 0 0 1
]
Figure 2:- Link Transformation Matrix
The above transformation matrix can be
denoted as 𝐻𝑖−0𝑖 (ai,αi,θi, di) for convenience.
DH (Denavit and Hartenberg) parameters [19]
are basically the horoscopic detail of any
motion of robotic manipulators. Jacques
Denavit and Richard Hartenberg proffered
these parameters in 1955[1].These are
basically used to describe the position of a
joint with respect to the base frame but in a
matrix format. When motion of the robotic
manipulator is being taken as a step of cycle
then all these DH tables [20] are multiplied
according to the standard matrix
multiplication method and the final DH table
gives the DH values of end-effector.
As per the properties and orientation of the
links with respect to base frame the following
DH table is to be designed (Fig.3).
Figure 3:- DH Parameter Table
Operation of robot will be under two work
cycle 1- Loading Cycle 2- Unloading Cycle.
Our objective is to find out DH matrix of end-
effector for both the loading cycle and
unloading cycle as well as the respected data
has also been checked for joint value, velocity
and acceleration.
A BRIEF LITERATURE REVIEW
A very short but effective literature review of
Kinematic Analysis of a robot and Robotic
Simulators is being presented here:-
Grasp dexterity is defined as the ability of a
grasp to achieve one or more useful secondary
objectives while satisfying kinematic
relationship (between joint and Cartesian
spaces) as the primary objective. This
definition is based on the fact that grasp is a
kinematically redundant system. To achieve
dexterous manipulation, many studies of
multi fingered hands have been carried out.
Salisbury has described some of the basic
Join
t i
Link
Lengt
h
(ai-1)
Link
Twis
t
(αi-1)
Link
Offse
t
(di)
Link
Rotatio
n
(θi)
1 0 0 0 θ1
2 L1 0 0 θ2
3 L2 0 0 θ3
4 L3 0 0 θ4
5 L4 0 0 θ5
6 L5 0 0 0
![Page 3: DYNAMICS CONTROL AND DH PARAMETRIZATION OF · PDF fileDenavit-Hartenberg notation (Fig.1) is widely used in the transformation of coordinate systems of linkages and robot mechanisms[1].](https://reader040.fdocuments.net/reader040/viewer/2022030407/5a8794817f8b9a882e8dbf44/html5/page/3.jpg)
ELK ASIA PACIFIC JOURNAL OF MECHANICAL ENGINEERING RRESEARCH
ISSN 2394-9368 (Online); EAPJMER/issn. 2394-9368/2016; Volume 2 Issue 2 (2016)
………………………………………………………………………………………………
issues of interest [2], Kerr and Roth [3],
Yoshikava Et. Al and other have proposed
schemes to solve for internal grasping forces
suspect to friction and other constants [4],
Nakamura gives a good overview of
mathematical tools for redundant
manipulation [5], Yoshikawa et al. have
developed control strategies for dexterous
hands [6]. Jamaludin jalani worked on to
develop a new method to capture the
parameters from robot fingers by using Robo
Realm tool. [7].
Studies by khurshid, Ghafoor and Malik
worked on enhancing robotic grasping and
fine manipulation using soft fingertip. The
ability to create stable, encompassing grasps
with subsets of fingers is greatly increased by
using soft fingertips that deform during
contact and apply a larger space of frictional
forces and moments than their rigid
counterparts [8].
Currently many researchers are actively
working on this type of task which can offer
universal gripping system with dexterous
approach in the operations. The design
concepts discussed while developing Gifu
Hand, [9] narrates towards biomimetic
approach. Issues related to the use of tendon /
cables for gripping actions are discussed in
this study. Also remedy is provided by using
the linkages for mechanical grasping.
Another similar effort by making provision of
multimodal sensors placed on / in a soft
surface of the tip of the gripper finger. [9] They
have proposed a design for tactile sensing to
embed as many receptors as possible
randomly in soft material so as to provide
different kinds of sensing modalities. In a
study by J. L. Bank, [10] feedback about the
content of its surroundings is suggested in
order to exhibit flexibility for embedding
adaptability in the system.
A paper by G. S. Gupta Et. Al. provides the
information on the design and development of
a low-cost control rig to intuitively
manipulate an anthropomorphic robotic arm
using a bilateral master–slave control
methodology. [11]. Further patterns of hand
motion during grasping and the influence of
sensory guidance is experimented by M.
Santello Et. Al. [12] this widens the scope of
biomimetic action analysis by experimenting
for grasping with the conditions such as, the
memory guided movements, virtual
imagination and physical object handling,
with the help of 15 DOF hand.
Biorobotics is another term which also
reflects the similar logic for total robotic
action with robot gripper as a subset.
Associated parameters like Hand kinematics,
Finger joint actuators, Drive chain
components, Number and location of sensors
are discussed with biomechanical design
strategies by J N Marcincin ET. al. [13] For
initial and final conditions of grasping, human
unconsciously changes the grasp strategy
![Page 4: DYNAMICS CONTROL AND DH PARAMETRIZATION OF · PDF fileDenavit-Hartenberg notation (Fig.1) is widely used in the transformation of coordinate systems of linkages and robot mechanisms[1].](https://reader040.fdocuments.net/reader040/viewer/2022030407/5a8794817f8b9a882e8dbf44/html5/page/4.jpg)
ELK ASIA PACIFIC JOURNAL OF MECHANICAL ENGINEERING RRESEARCH
ISSN 2394-9368 (Online); EAPJMER/issn. 2394-9368/2016; Volume 2 Issue 2 (2016)
………………………………………………………………………………………………
according to the size of object even if they
possess same geometry. It is termed as the
grasp planning for the scale dependent grasp.
The grasp patterns thus observed in human
grasping are applied with couple of grasp
procedures to multi-fingered robot hands by
T. Shirai et. al. [14]
A concept for integrating the control system
of an anthropomorphic robot hand into the
control system of an entire humanoid robot
was presented by D. Osswald [15]. Grasp
taxonomy was developed on the basis of the
objects and actions in the intended
environment that can be used to describe the
grasp patterns.
Ohol and Kajale have also worked on the
biometric approach to design a multi-fingered
Robotic Gripper [16].
A robotics simulator is used to create
embedded applications for a robot without
depending physically on the actual machine,
thus saving cost and time. In some case, these
applications can be transferred on the real
robot (or rebuilt) without modifications. The
term robotics simulator can refer to several
different robotics simulation applications. For
example, in mobile robotics applications,
behavior-based robotics simulators allow
users to create simple worlds of rigid objects
and light sources and to program robots to
interact with these worlds. Behavior-based
simulation allows for actions that are more
biological in nature when compared to
simulators that are more binary, or
computational. In addition, behavior-based
simulators may "learn" from mistakes and are
capable of demonstrating the
anthropomorphic quality of tenacity. [17]
Sensor-based robot actions are much more
difficult to simulate and/or to program off-
line, since the robot motion depends on the
instantaneous sensor readings in the real
world. [17]
Modern simulators tend to provide the
following features:
Fast robot prototyping Using the own
simulator as creation tool (Virtual Robot
Experimentation Platform, Webots, R-
Station, Marilou).Using external tools.
Physics engines for realistic movements.
Most simulators use ODE (Gazebo, LPZ
Robots, Marilou, Webots) or PhysX
(Microsoft Robotics Studio).
Realistic 3d rendering. Standard 3d
modeling tools or third party tools can be
used to build the environments.
Dynamic Robot bodies with scripting. C,
C++, Perl, Python, Java, URBI, MATLAB
languages used by Webots, Python used by
Gazebo.
![Page 5: DYNAMICS CONTROL AND DH PARAMETRIZATION OF · PDF fileDenavit-Hartenberg notation (Fig.1) is widely used in the transformation of coordinate systems of linkages and robot mechanisms[1].](https://reader040.fdocuments.net/reader040/viewer/2022030407/5a8794817f8b9a882e8dbf44/html5/page/5.jpg)
ELK ASIA PACIFIC JOURNAL OF MECHANICAL ENGINEERING RRESEARCH
ISSN 2394-9368 (Online); EAPJMER/issn. 2394-9368/2016; Volume 2 Issue 2 (2016)
………………………………………………………………………………………………
WORKSPACE SIMULATION
The general use of robots is to give a complex
operation in a 3 D environment. The design of
the links as well as the actuation mechanism
[25] must be so perfect so that they are capable
of doing the exact work what we need within
their work envelope.
Figure 4:- Robotic Workspace Simulation
Workspace simulation (Fig. 4) also gives
some virtual experiences of problems that can
occur in real time while working with the
industrial robots. There are so many advance
simulator softwares like Roboanalyzer in the
market that are capable of recording the link
properties as well as simulating them along
with.
ACTUAL WORKING STEPS AND
THEIR CALCULATIONS
The complete operation of robot is basically
combination of 2 major operations: - 1-
Loading Raw Material in the XLMILL
Machine 2- Unloading Finished work piece
from the vice of XLMILL Machine.
In both these steps there are several other sub
steps which needs to be performed and which
are the heart of both the steps :-
A. Load Raw Material in the XLMILL
Machine
Movement of robot’s end effector along
with other links to reach till pallet (Fig. 5)
position from its home position.
Figure 5:- Loading Step 1
Grasping the raw material billet from the
pallet [21] (Gripper Close) and picking it up
(Fig. 6).
Figure 6:- Gripping the raw workpiece smoothly in
pallete
Carrying out this billet till the vice of the
XLMILL Machine (Fig. 7).
Figure 7:- Loading Step 2
Placing the piece in the Vice smoothly.
![Page 6: DYNAMICS CONTROL AND DH PARAMETRIZATION OF · PDF fileDenavit-Hartenberg notation (Fig.1) is widely used in the transformation of coordinate systems of linkages and robot mechanisms[1].](https://reader040.fdocuments.net/reader040/viewer/2022030407/5a8794817f8b9a882e8dbf44/html5/page/6.jpg)
ELK ASIA PACIFIC JOURNAL OF MECHANICAL ENGINEERING RRESEARCH
ISSN 2394-9368 (Online); EAPJMER/issn. 2394-9368/2016; Volume 2 Issue 2 (2016)
………………………………………………………………………………………………
Again reaching till pallet position (Not to
interrupt the XLMILL Machine)
Operations.
B. Unloading Finished work piece form
the XLMILL Machine
Reaching end-effector of robot till
machine vice.
Grasping of the finished work piece
(Gripper Close) and picking it up.
Again reaching end-effector till the pallet
position.
Gripper Open and placing of the finished
work piece in the Palette smoothly.
Reaching back to its home position from
pallet position.
Calculation is made to find out the end-
effector DH matrix of the robot after both
these two steps and for this work
Roboanalyzer proved so helpful software.
These are the DH Tables (Table 1 and Table
2) of both the Loading steps:-
Table 1:- Home Position to Pallet Position
Table 2:- Pallet Position to Vice
POSITION
When we are taking about the unload cycle
then these value of Initial Value and Final
Value will be Interchanged when it need to go
in a reverse direction of movement. If we are
talking about the grasping and relieving
action, picking up and placing object in the
pallet and vice smoothly of robot gripper[18]
then it will take at least 5 seconds of overall
operation. When an Industrial robot is under
the operation of very important industrial
work then even a second of time lag matters.
So this 5 second time lag must be associated
and managed along with the operation in a
manner so that it can’t affect the whole work
time.
There is an error in the software that the joint
offset is taken as 0.322m in it, but it is exactly
the 0.375m of Joint 1. This will affect the end-
effector DH parameter Matrix slightly if we
find out the DH table as per the exact
dimensions of the robot.
![Page 7: DYNAMICS CONTROL AND DH PARAMETRIZATION OF · PDF fileDenavit-Hartenberg notation (Fig.1) is widely used in the transformation of coordinate systems of linkages and robot mechanisms[1].](https://reader040.fdocuments.net/reader040/viewer/2022030407/5a8794817f8b9a882e8dbf44/html5/page/7.jpg)
ELK ASIA PACIFIC JOURNAL OF MECHANICAL ENGINEERING RRESEARCH
ISSN 2394-9368 (Online); EAPJMER/issn. 2394-9368/2016; Volume 2 Issue 2 (2016)
………………………………………………………………………………………………
FINAL DH MATRIX FOR END-
EFFECTOR
When the end-effector will reach till the pallet
position in the loading step then there will be
some variation in the DH values of joint
placed at end-effector with the base frame of
the robot. The DH values (DH Matrix) (Fig.8)
that is obtained after this step (reaching the
robot end effector from its home position to
the pallet position) will be as:-
Figure 8:- DH Matrix of End-Effector after loading
Step 1
And after reaching the end-effector till the
machine vice to place the work piece [23] , the
DH matrix (Fig.9) of end-effector will be
Figure 9:- DH Matrix of End-Effector after loading
Step 2
When the end effector will be in home
position then its end-effector’s DH matrix
(Fig. 10) will be,
Figure 10:- DH Matrix of End-Effector in Home
Position
Parameters of DH value will be considered
only with respect to the base frame only; it
doesn’t matter wherever the robot end-
effector is.
JOINT VALUE, VELOCITY AND
ACCELARATION CHARACTERISTICS
Each joint angles and position at the end of
both these two steps will depend upon the
final position of end-effector after each step,
their velocity and acceleration [22] property
will depend upon the time taken to complete
the operation and number of steps taken.
1000
400242.0051813.00998657.0
602411.0997129.0055299.0051734.0
033364.0055224.099847.0002865.0
1000
628509.0065229.0099787.0
248266.0450446.0892318.0029445.0
49076.0890418.0451407.0058205.0
1000
559.0100
0010
375.0001
![Page 8: DYNAMICS CONTROL AND DH PARAMETRIZATION OF · PDF fileDenavit-Hartenberg notation (Fig.1) is widely used in the transformation of coordinate systems of linkages and robot mechanisms[1].](https://reader040.fdocuments.net/reader040/viewer/2022030407/5a8794817f8b9a882e8dbf44/html5/page/8.jpg)
ELK ASIA PACIFIC JOURNAL OF MECHANICAL ENGINEERING RRESEARCH
ISSN 2394-9368 (Online); EAPJMER/issn. 2394-9368/2016; Volume 2 Issue 2 (2016)
………………………………………………………………………………………………
There are several properties of the
manipulators that can be seen easily by
analyzing these graphs,
Graph 1:- Loading Step 1
![Page 9: DYNAMICS CONTROL AND DH PARAMETRIZATION OF · PDF fileDenavit-Hartenberg notation (Fig.1) is widely used in the transformation of coordinate systems of linkages and robot mechanisms[1].](https://reader040.fdocuments.net/reader040/viewer/2022030407/5a8794817f8b9a882e8dbf44/html5/page/9.jpg)
ELK ASIA PACIFIC JOURNAL OF MECHANICAL ENGINEERING RRESEARCH
ISSN 2394-9368 (Online); EAPJMER/issn. 2394-9368/2016; Volume 2 Issue 2 (2016)
………………………………………………………………………………………………
Graph 2:- Unloading Step 2
Graph 3:- Loading Step 2
![Page 10: DYNAMICS CONTROL AND DH PARAMETRIZATION OF · PDF fileDenavit-Hartenberg notation (Fig.1) is widely used in the transformation of coordinate systems of linkages and robot mechanisms[1].](https://reader040.fdocuments.net/reader040/viewer/2022030407/5a8794817f8b9a882e8dbf44/html5/page/10.jpg)
ELK ASIA PACIFIC JOURNAL OF MECHANICAL ENGINEERING RRESEARCH
ISSN 2394-9368 (Online); EAPJMER/issn. 2394-9368/2016; Volume 2 Issue 2 (2016)
………………………………………………………………………………………………
Graph 4:- Unloading Step 1
RESULTS AND DISCUSSION
The objective was to check whether the work
dimension in which we are working is under
the work envelope of the manipulator and if so
then it is taking how much of the work space to
easily complete the operation. The DH matrix
of maximum work envelope dimension
(Fig.11) will be
Figure 11:- Maximum Work Dimension DH Matrix
By calculating the percent of use of work
envelope (Table 3) space according to the
displacement ( when the robot is operating
under the operation) per the maximum reach of
robot arm we find :-
JOINT # METHOD TO
CALCULATE
PERCENT
AGE
Joint1 (86.83/340)*100 25.00%
Joint 2 (40.58/45)*100 90.17%
Joint 3 (17.61/25)*100 70.44%
Joint4 (0/340)*100 0%
Joint5 (110/180)*100 61.11%
Joint 6 (0/340)*100 0%
Table 3 :- Percentage of use of Work Space
Accuracy of the trajectory planning depends
upon the smooth operation of the robot and this
smooth operation [24] depends upon the number
1000
346674.0939693.0034202.0
185707.0116978.0939693.0321394.0
510224.0321394.034202.0883022.0
![Page 11: DYNAMICS CONTROL AND DH PARAMETRIZATION OF · PDF fileDenavit-Hartenberg notation (Fig.1) is widely used in the transformation of coordinate systems of linkages and robot mechanisms[1].](https://reader040.fdocuments.net/reader040/viewer/2022030407/5a8794817f8b9a882e8dbf44/html5/page/11.jpg)
ELK ASIA PACIFIC JOURNAL OF MECHANICAL ENGINEERING RRESEARCH
ISSN 2394-9368 (Online); EAPJMER/issn. 2394-9368/2016; Volume 2 Issue 2 (2016)
………………………………………………………………………………………………
of steps taken in a certain time to reach till the
end-effector position. This will also help in
controlling the overall motion of the robotic
manipulator by varying these parameters.
By reading the given joint characteristics we
got the following details:-
LOADING SUB STEP 1 VS UNLOADING
SUB STEP 2
All the characteristics of the Joint 1 and
Joint 3 in loading sub step 1 will be
identically opposite to the unloading sub
step 2 because in loading step Joint 1 will
move in forward direction but in the
unloading step it will move in reverse
direction.
There is no movement in the Joint 4, Joint 6
so no fluctuation will be seen in the plots of
both these steps.
Same analysis is being taken into
consideration for the loading Sub step 2 vs
Unloading sub step 1.
CONCLUSION
We Conclude that during the whole cycle
operation we got that approx. 41.11% of the
overall work space is utilizing. There is also a
wide space availability in the work envelope so
that there can be some more operation added
with the loading and unloading. When the work
is under the repetitive manufacturing then the
configuration that is explained under this paper
is best for operation but some change in the
operational procedure will take place.
This is the best method to mathematically
verify and check how much of the work space
a manipulator is utilizing and if there exist any
problem in the overall operation, rectify that
and use the best of it. Method of finding the DH
matrix for orientation of the end-effectors is
novel for the industrial robotics.
REFERENCES
A Denavit, J. and Hartenberg, R. S., (1955).
A Kinematic Notation for Lower-Pair
Mechanisms Based on Matrices, ASME
Journal of Applied Mechanisms, pp. 215-
221, Salisbury, J. K., (1985)
Kinematic and force analysis of articulated
hands”, In Mason, M. T., and Salisbury, J.
K. (eds.): Robot Hand and Mechanics of
Manipulation. Cambridge, MA: MIT Press,
J. Kerr and R. Roth, (1986)
Analysis of multifingered hands”, Int. J.
Robotics Research, 4, No.4, pp 3-17,.
Yoshikawa, T., Nagai, K., (1987)
Manipulating and Grasping Forces in
Manipulation by Multifingered Hands,
Proceedings of the IEEE International
Conference on Robotic and Automation,
pp. 1998-2004,. Nakamura, Y., (1991)
Advanced Robotics: Redundancy and
Optimization, Addison-Wesley,
Yoshikawa, T., Zheng, X., (1993)
![Page 12: DYNAMICS CONTROL AND DH PARAMETRIZATION OF · PDF fileDenavit-Hartenberg notation (Fig.1) is widely used in the transformation of coordinate systems of linkages and robot mechanisms[1].](https://reader040.fdocuments.net/reader040/viewer/2022030407/5a8794817f8b9a882e8dbf44/html5/page/12.jpg)
ELK ASIA PACIFIC JOURNAL OF MECHANICAL ENGINEERING RRESEARCH
ISSN 2394-9368 (Online); EAPJMER/issn. 2394-9368/2016; Volume 2 Issue 2 (2016)
………………………………………………………………………………………………
Coordinated Dynamic Hybrid
Position/Force Control for Multiple Robot
Manipulation Handling One Constrained
Object, International Journal of Robotics
Research, Vol.12, No., pp. 219-
230.Jamaludin Jalani, (2011)
Development of the Forward Kinematic for
Robot Fingers By using
Roborealm,.Khurshid, A Ghafoor, M. A.
Malik, (2010)
Robotic Grasping and Fine Manipulation
Using Soft Fingertip,.
Groover, M.P., Weiss, M., Nagel, N. R.,
Odrey, N. G., (1986)
Industrial robotics, McGraw Hill, Siciliano,
B., Sciavicco, L., Villani, L., Oriolo, G.,
(2008)
Robotics; Modeling, Planning and Control,
Springer-Verlag London Limited,
Glasgow,.
Kaftanoğlu, B., Cengiz, M. C., Doğan, B.,
(2007).
Design and Development of an Industrial
Robot, The 13th International Conference
on Machine Design and Production,
İstanbul,
Hesse, S., Steinmann, R., Schunk, H.,
Monkman, G. J., (2007)
Robot Grippers, WILEY VCH Verlag
GmbH & Co. KGAA, Weinheim,
Lundstrom, G., (1976).
A New Method of Designing Grippers, 6th
International Symposium of Industrial
Robots, Nottingham, pp F3 25-36,
Kauffmann, J., L’Hote, F., (1983)
Robot Technology, Vol. 4: Robot
Components and Systems, Prentice-Hall,
Englewood, Monkmann G. J., (1992).
Robot Grippers in Packaging, 23rd
International Symposium on Industrial
Robots, Barcelona, pp579-583 Ohol and
Kajale, (2011).
Biometric approach for Design of Multi
fingered Robotic Gripper (MRG) & Its
Analysis or effective Dexterous Grasping",
James Kramer, Matthias Scheutz, (2007)
Development environments for
autonomous mobile robots: A survey,
Auton Robot, Springer, Mason M T and
Salisbury J., (1985)
Robot Hands and the Mechanics of
Manipulation”, The MIT Press,S.K. Saha,
(2008)
Introduction to Robotics, Chap: 5, Tata
McGraw-Hill, New Delhi,. Mittal R.K.,
Nagrath I.J., (2007) Robotics and Control,
Tata McGraw-Hill, New Delhi,.
Anjum Riaz Faztoo, M.Tech. Dissertation
(2012)
“Solid Modeling and Analysis of Four
Fingered Robotic Gripper”, Jamia Millia
Islamia, New Delhi,. Doru Talab˘, (January
2014)
Mechanical Models and the mobility of
robots and mechanisms, Transilvania
University of Brasov, 29, Eroilor, 500036
![Page 13: DYNAMICS CONTROL AND DH PARAMETRIZATION OF · PDF fileDenavit-Hartenberg notation (Fig.1) is widely used in the transformation of coordinate systems of linkages and robot mechanisms[1].](https://reader040.fdocuments.net/reader040/viewer/2022030407/5a8794817f8b9a882e8dbf44/html5/page/13.jpg)
ELK ASIA PACIFIC JOURNAL OF MECHANICAL ENGINEERING RRESEARCH
ISSN 2394-9368 (Online); EAPJMER/issn. 2394-9368/2016; Volume 2 Issue 2 (2016)
………………………………………………………………………………………………
Brasov, Romania, Robotica: Cambridge
University Press 2014, page 1 of 13,.Pilli,
S.C., (July 2003)
Kinematic analysis of whole arm
manipulators, IISc Bangalore,.
RoboAnalyzer User Manual,
http://www.roboanalyzer.com.
David H. Myszka, (2012) Machines and
Mechanisms, ed: 4th, Prentice Hall
Publication,.