Di erencia legyenletek es dinamikai rendszerek
188
Differenci´ alegyenletek ´ es dinamikai rendszerek Simon L. P´ eter E¨ otv¨ os Lor´ and Tudom´ anyegyetem Matematikai Int´ ezet Alkalmazott Anal´ ızis ´ es Sz´ am´ ıt´ asmatematikai Tansz´ ek 2012
Transcript of Di erencia legyenletek es dinamikai rendszerek

Differencialegyenletek es dinamikai rendszerek
Simon L. Peter
Eotvos Lorand Tudomanyegyetem
Matematikai Intezet
Alkalmazott Analızis es Szamıtasmatematikai Tanszek
2012

Tartalomjegyzek
1. Bevezetes 41.1. Differencialegyenletek kvalitatıv elmelete es a dinamikai rendszerek . . . 61.2. A jegyzetben targyalt temakorok . . . . . . . . . . . . . . . . . . . . . . 7
2. Dinamikai rendszerek topologikus osztalyozasa 112.1. Dinamikai rendszerek ekvivalenciai . . . . . . . . . . . . . . . . . . . . . 11
2.1.1. Diszkret ideju dinamikai rendszerek . . . . . . . . . . . . . . . . . 132.1.2. Folytonos ideju dinamikai rendszerek . . . . . . . . . . . . . . . . 15
2.2. Linearis rendszerek Ck-osztalyozasa . . . . . . . . . . . . . . . . . . . . . 172.3. Linearis rendszerek C0-osztalyozasa . . . . . . . . . . . . . . . . . . . . . 19
2.3.1. Folytonos ideju eset n = 1 dimenzioban . . . . . . . . . . . . . . . 192.3.2. Diszkret ideju eset n = 1 dimenzioban . . . . . . . . . . . . . . . 202.3.3. Folytonos ideju eset n-dimenzioban . . . . . . . . . . . . . . . . . 212.3.4. Diszkret ideju eset n-dimenzioban . . . . . . . . . . . . . . . . . . 28
2.4. Feladatok . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3. Lokalis osztalyozas, normalformaelmelet es a Hartman–Grobman-tetel 343.1. Hartman–Grobman-tetel . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.1.1. A bizonyıtas 1. lepese . . . . . . . . . . . . . . . . . . . . . . . . 383.1.2. A bizonyıtas 2. lepese . . . . . . . . . . . . . . . . . . . . . . . . 393.1.3. A bizonyıtas 3. lepese . . . . . . . . . . . . . . . . . . . . . . . . 403.1.4. A bizonyıtas 4. lepese . . . . . . . . . . . . . . . . . . . . . . . . 41
3.2. Normalformak . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 453.3. Feladatok . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4. Stabil, instabil es centralis sokasag tetel 524.1. Stabil es instabil sokasag tetel . . . . . . . . . . . . . . . . . . . . . . . . 52
4.1.1. Altalanos eset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 534.1.2. Globalis sokasagok . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.2. Centralis sokasag tetel . . . . . . . . . . . . . . . . . . . . . . . . . . . . 594.2.1. Altalanos megkozelıtes . . . . . . . . . . . . . . . . . . . . . . . . 60
1

4.2.2. A centralis sokasag approximacioja . . . . . . . . . . . . . . . . . 624.3. Feladatok . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5. Globalis vizsgalat, periodikus megoldasok, vektormezo indexe 695.1. A globalis faziskep vizsgalata a lokalis faziskepek segıtsegevel . . . . . . . 69
5.1.1. Globalis faziskep 1 dimenzioban . . . . . . . . . . . . . . . . . . . 705.1.2. Globalis faziskep 2 dimenzioban . . . . . . . . . . . . . . . . . . . 73
5.2. Periodikus megoldasok . . . . . . . . . . . . . . . . . . . . . . . . . . . . 875.2.1. Periodikus megoldasok letezese . . . . . . . . . . . . . . . . . . . 875.2.2. Lokalis vizsgalat periodikus megoldasok korul . . . . . . . . . . . 91
5.3. Indexelmelet alkalmazasa ketdimenzios rendszerekre . . . . . . . . . . . . 975.4. Vegtelenbeli viselkedes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1025.5. Feladatok . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
6. A bifurkacioelmelet alapjai es strukturalis stabilitas 1086.1. Elemi bifurkaciok normalformaja . . . . . . . . . . . . . . . . . . . . . . 1096.2. Bifurkacio megjelenesenek szukseges feltetelei . . . . . . . . . . . . . . . 1216.3. Strukturalis stabilitas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
6.3.1. Egydimenzios rendszerek strukturalis stabilitasa . . . . . . . . . . 1276.3.2. Strukturalis stabilitas tobb dimenzios rendszerekben . . . . . . . . 130
7. Egy kodimenzios bifurkaciok, a nyereg-csomo es az Andronov–Hopf-bifurkacio 1327.1. Nyereg-csomo bifurkacio . . . . . . . . . . . . . . . . . . . . . . . . . . . 1327.2. Andronov–Hopf-bifurkacio . . . . . . . . . . . . . . . . . . . . . . . . . . 135
7.2.1. A Ljapunov-fuggveny eloallıtasa . . . . . . . . . . . . . . . . . . . 1377.2.2. Andronov–Hopf-bifurkacio linearis parameterfugges eseten . . . . 1417.2.3. Andronov–Hopf-bifurkacio altalanos parameterfugges eseten Jordan-
normalalaku linearis resszel . . . . . . . . . . . . . . . . . . . . . 1437.2.4. Andronov–Hopf-bifurkacio tetszoleges parameterfugges eseten . . 1457.2.5. Pelda az Andronov–Hopf-bifurkacio meghatarozasara . . . . . . . 147
7.3. Egy kodimenzios bifurkacios gorbek meghatarozasa ketparameteres rend-szerekben a parametrikus reprezentacio modszerevel . . . . . . . . . . . . 1507.3.1. A parametrikus reprezentacio modszere . . . . . . . . . . . . . . . 1507.3.2. Bifurkacios gorbek ketparameteres rendszerekben . . . . . . . . . 156
8. Diszkret dinamikai rendszerek, szimbolikus dinamika, kaotikus viselke-des 1608.1. Diszkret dinamikai rendszerek . . . . . . . . . . . . . . . . . . . . . . . . 160
8.1.1. A logisztikus lekepezes . . . . . . . . . . . . . . . . . . . . . . . . 1628.1.2. Kaotikus sorozatok . . . . . . . . . . . . . . . . . . . . . . . . . . 164
2

8.1.3. Szimbolikus dinamika . . . . . . . . . . . . . . . . . . . . . . . . . 167
9. Reakcio-diffuzio egyenletek 1709.1. Reakcio-diffuzio egyenletek stacionarius megoldasai . . . . . . . . . . . . 1719.2. Reakcio-diffuzio egyenletek utazo hullam megoldasai . . . . . . . . . . . . 173
9.2.1. Utazo hullamok letezese . . . . . . . . . . . . . . . . . . . . . . . 1749.2.2. Utazo hullamok stabilitasa . . . . . . . . . . . . . . . . . . . . . . 175
Hivatkozasok 186
3

1. fejezet
Bevezetes
Eloszo
A jelen jegyzet nagyreszt azokon az eloadasokon alapul, amelyeket a szerzo az Eotvos Lo-rand Tudomanyegyetemen tartott felsobb eves matematikus es alkalmazott matematikushallgatok szamara a bevezeto differencialegyenlet eloadast kovetoen, differencialegyenle-tek kvalitatıv elmeleterol es dinamikai (dinamikus) rendszerekrol. Ennek megfeleloenelsosorban ezen alkalmazott matematikus es matematikus hallgatokat celoztuk meg vele,de nagyon remeljuk, hogy mas egyetemek matematikus es differencialegyenleteket alkal-mazo nem matematikus hallgatoi is haszonnal olvassak majd.
A jegyzet olvasasahoz tehat elofeltetel a differencialegyenletek alapveto ismerete, el-sosorban nehany egyszeru egyenlet megoldasanak modszere, a linearis rendszerek elme-letenek alapjai es egyszeru ketdimenzios faziskepek meghatarozasa. Nem targyaljuk ajegyzetben az alapveto egzisztencia es unicitas teteleket sem, (hiszen ezek az ELTE-n azalapkurzusban sorra kerulnek), de ezek ismerete nelkul is erthetok a jegyzetben targyalttemak. A bevezetesben alabb tomoren osszefoglaljuk a bevezeto differencialegyenlet kur-zusban targyalt fontosabb fogalmakat es teteleket, az erdeklodo olvasonak ajanljuk a[26] konyvet, a http://www.cs.elte.hu/ simonp/kozdiff.pdf oldalon elerheto elektronikusjegyzetet, vagy mas bevezeto jellegu differencialegyenlet jegyzetet.
Koszonetnyilvanıtas
A szerzo koszonetet mond az Eotvos Lorand Tudomanyegyetem Matematikai Intezetebenaz Alkalmazott Analızis es Szamıtasmatematikai Tanszeken dolgozo kollegainak, akiktamogattak a dinamikai rendszerek es differencialegyenletek kurzus megindıtasat es ajegyzet megırasat.
Koszonet illeti a jegyzet lektorat Nagy Balint tanszekvezeto foiskolai docenst, akimindenre kiterjedo figyelemmel igyekezett javıtani a hibakat, es elosegıteni az erthetose-
4

get, es a konzisztenciat.A jegyzet a TAMOP-4.1.2.A/1-11/1 palyazat, Interdiszciplinaris es komp-
lex megkozelıtesu digitalis tananyagfejlesztes a termeszettudomanyi kepzesiterulet mesterszakjaihoz cımu projektjenek kereteben keszult.
5
1.1. Differencialegyenletek kvalitatıv elmelete es a
dinamikai rendszerek
A differencialegyenletek elmelete a matematikanak tobb mint 300 eves terulete, melyetmindig az alkalmazasok felol erkezo kihıvasok termekenyıtettek meg, es amely ezt tovabb-adva a matematika tobb teruletenek letrejottet motivalta. Nem celunk errol a hatalmasteruletrol atfogo kepet adni, azonban a dinamikai rendszerek elmeletevel valo kapcsola-tara szeretnenk ravilagıtani. A szerzo felfogasaban a differencialegyenletek vizsgalatavalkapcsolatos matematikai eredmenyek az alabbi harom szempont szerint csoportosıthatok.
• A megoldasok eloallıtasa keplettel, vagy numerikus kozelıtessel.
• A megoldas letezesenek es egyertelmusegenek bizonyıtasa.
• A megoldas tulajdonsagainak jellemzese a megoldas kepletenek ismerete nelkul.
Az elso terulet iranyaban nyilvanvalo igeny jelentkezik az alkalmazasok felol. Erdemesmegjegyezni, hogy az utobbi 50 evben a hangsuly a numerikus kozelıtesen van, ebbol ku-lon tudomanyterulet nott ki, a differencialegyenletek numerikus modszereinek vizsgalata.A masodik kerdes a kozonseges differencialegyenletekre vonatkozo kezdeti ertek felada-tokra vonatkozoan nagyon szepen megvalaszolhato (motivalva normalt terbeli lekepeze-sek fixpont teteleinek kifejleszteset), ezert a mai kutatasok ezzel kapcsolatos egyik nagyterulete a nemlinearis egyenletekre vonatkozo peremertek-feladatok megoldasai pontosszamanak vizsgalata. Megjegyezzuk, hogy parcialis differencialegyenletekre vonatkozoanaz egzisztencia es unicitas kerdese messze nem tisztazhato ilyen egyszeruen, ezert ez mais nagyon aktıv kutatasi terulet. A fenti harmadik temakor vizsgalatanak kezdetei aXIX. szazad vegeig nyulnak vissza, amikor igeny mutatkozott nemlinearis kozonsegesdifferencialegyenletek vizsgalatara, es vilagossa valt, hogy ezek keplettel valo megoldasa,csak nagyon specialis esetben varhato. Talan Poincare nevehez kothetok az ugynevezettkvalitatıv elmelet kezdetei, amikor azt kezdtek vizsgalni, hogy a megoldas kepletenekismerete nelkul, hogyan hatarozhatok meg megis a megoldas bizonyos tulajdonsagai. Aparadigmavaltast egyszeruen szemleltethetjuk az x = x, y = −y rendszer peldajan. Arendszer megoldasa termeszetesen egyszeruen eloallıthato keplettel, a hagyomanyos meg-kozelıtes szerint ezen rendszert latva a matematikus valasza: x(t) = etx0, y(t) = e−ty0.Ehhez kepest a kvalitatıv vizsgalat ehhez a rendszerhez az 1.1. abran lathato faziskepetadja valaszkent, amely ugyan a megoldasok idofuggeset nem adja meg, viszont szamosfontos tulajdonsaga leolvashato rola. A rendszerre tehat elsosorban mint dinamikai rend-szere gondolunk, melynek a palyait szeretnenk jellemezni, foleg geometriai szempontbol.Ezzel a differencialegyenletek kvalitatıv elmelete es a dinamikai, vagy mas szoval dina-mikus rendszerek elmelete szoros kapcsolatba kerult, melyet az is jelez, hogy a moderntankonyvek cımeben a differencialegyenletek szo mellett legtobbszor a dinamikai rendszerkifejezes is szerepel. A kvalitatıv vizsgalat fejlodesehez jelentos mertekben hozzajarult
6

1.1. abra. Az x = x, y = −y rendszer faziskepe, az ugynevezett nyereg.
az 1960-as evektol kezdodoen a kaotikus viselkedest mutato rendszerek felfedezese es afaziskepek szamıtogeppel torteno numerikus eloallıtasanak lehetosege. Mara a kvalita-tıv vizsgalat alapveto eszkozeinek hasznalata rutinna valt, nemcsak a fizikus es mernok,hanem a vegyesz, biologus es kozgazdasz hallgatok is mar egyetemi tanulmanyaik soranmegismerkednek ezekkel. Ez is magyarazza, hogy az elmult ket evtizedben tobb bevezetojellegu monografia szuletett, amely nemcsak a matematikus kepzettsegu, hanem a kellomatematikai hatterrel rendelkezo nem matematikus olvasokat is bevezeti a kvalitatıvvizsgalat rejtelmeibe. Peldakent emlıthetjuk a kaoszelmeletbe bevezeto [1] monografiat,Guckenheimer es Holmes klasszikusnak mondhato konyvet [11], Hale es Kocak nagyonszemleletesen megırt munkajat [12], Hubbard es West pedagogikusan megszerkesztett[16], valamint Perko [19] szeles spektrumot atolelo konyvet, illetve Seydel bifurkaciokrolırott munkajat [22]. A kicsivel tobb matematikai bizonyıtast igenylo olvasok is szamosangol nyelvu monografiabol tajekozodhatnak, Arnold [2, 3], Chow es Hale [8], Chicone[7], Hirsch, Smale es Devaney [15], valamint Robinson [20] es Wiggins [27] konyvei csaknehany a szeles palettarol. Lathato, hogy a kvalitatıv elmeletet reszletesen targyalo,egyetemi hallgatoknak szolo, magyar nyelvu tankonyv nem szerepel ezek kozott, aminagyban motivalta ezen jegyzet megırasat.
1.2. A jegyzetben targyalt temakorok
Az alabbiakban bemutatjuk azt a matematikai strukturat, amelyben vizsgalodasainkatfolytatjuk, illetve roviden ismertetjuk a fobb temakat, amelyeket reszletesen targyalnifogunk. Vizsgalatunk fo objektuma az
x(t) = f(x(t))
autonom, kozonseges differencialegyenlet-rendszer, melyben x : R → Rn az ismeret-len fuggveny es f : Rn → Rn adott folytonosan differencialhato fuggveny, melyet jobb-
7

oldalnak nevezunk. Ebbe a kategoriaba a legtobb fontos kozonseges differencialegyenlet-rendszer belefer, es lehetetlen lenne felsorolni mindazokat a mernoki, fizikai, kemiai, bio-logiai, kozgazdasagi alkalmazasokat, amelyekben ilyen rendszerek vizsgalata megjelenik.Az egyenlet x(0) = p kezdeti feltetelbol indulo megoldasat ϕ(t, p)-vel jelolve igazolhato,hogy a ϕ fuggveny teljesıti a (folytonos ideju) dinamikai (vagy dinamikus) rendszer alabbidefinıciojaban szereplo felteteleket.
Definıcio 1.1.. A ϕ : R × Rn → Rn folytonosan differencialhato fuggvenyt folytonosideju dinamikai rendszernek nevezzuk, ha teljesıti az alabbi ket feltetelt.
• Minden p ∈ Rn eseten ϕ(0, p) = p ,
• Minden p ∈ Rn es t, s ∈ R eseten ϕ(t, ϕ(s, p)) = ϕ(t+ s, p).
A dinamikai rendszer egy determinisztikus folyamat modelljenek foghato fel, melybenϕ(t, p) azt az allapotot jeloli, ahova a rendszer a p allapotbol indulva t ido alatt jut.Egyszeruen igazolhato, hogy a fenti kozonseges differencialegyenlet-rendszer megoldasalenyegeben egy dinamikai rendszert hataroz meg. (Elofordulhat, hogy a megoldasok nemertelmezettek az egesz szamegyenesen, amit viszont a dinamikai rendszertol elvarunk,azonban ez a palyakon nem lathato.) Illetve egy dinamikai rendszerhez mindig meg-adhato egy differencialegyenlet, aminek ez a megoldasa. Ezert az autonom kozonsegesdifferencialegyenlet-rendszert es a dinamikai rendszert egyutt szoktak vizsgalni, mi isparhuzamosan hasznaljuk a jegyzetben a ket fogalmat.
A dinamikai rendszer fenti definıcioja tobb iranyban kiterjesztheto. Egyik fontosalternatıva az, amelyben az ido szerepet az R helyett a Z halmaz veszi at, ekkor jutunka diszkret ideju dinamikai rendszer fogalmahoz.
Definıcio 1.2.. A ϕ : Z × Rn → Rn folytonos fuggvenyt diszkret ideju dinamikai rend-szernek nevezzuk, ha teljesıti az alabbi ket feltetelt.
• Minden p ∈ Rn eseten ϕ(0, p) = p ,
• Minden p ∈ Rn es k,m ∈ Z eseten ϕ(k, ϕ(m, p)) = ϕ(k +m, p).
Ahogyan a folytonos ideju dinamikai rendszert az autonom differencialegyenletbol szar-maztattuk, ugy a diszkret ideju dinamikai rendszert egy lekepezesbol lehet szarmaztatni.Legyen ugyanis g : Rn → Rn adott folytonos fuggveny, es tekintsuk az
xk+1 = g(xk)
x0 = p rekurzioval definialt sorozatot (nevezhetjuk differenciaegyenletnek is). A ϕ(k, p) =xk keplettel definialt fuggveny teljesıti a diszkret ideju dinamikai rendszer definıciojabanszereplo felteteleket. Tehat egy differenciaegyenlet meghataroz egy diszkret ideju di-namikai rendszert. Fordıtva pedig, ha ϕ egy diszkret ideju dinamikai rendszer, akkor
8

legyen g(p) = ϕ(1, p). Egyszeruen ellenorizheto, hogy ezzel xk = ϕ(k, p) a fenti rekurziomegoldasa, melyet roviden a ϕ(k, p) = gk(p) keplettel fejeznek ki, ahol k nem kitevot,hanem a g fuggveny k-szori alkalmazasat jelenti (negatıv k eseten az inverz fuggvenyalkalmazasat).
A ketfele dinamikai rendszer sok esetben egyutt targyalhato, ekkor az ido valtozot aT halmazbol vesszuk, amely az R vagy Z szamhalmazt jeloli. Folytonos ideju esetbengyakran hasznaljak a folyam (flow) kifejezest, diszkret esetben pedig a lekepezes (map)kifejezest.
A dinamikai rendszerek vizsgalatanak fo targya a palyak geometriai jellemzese. Egyp pont palyaja a
ϕ(t, p) : t ∈ T
halmaz, amely folytonos esetben egy gorbe, diszkret esetben pedig egy pontsorozat afazisterben.
Az alapveto matematikai struktura ismertetese utan terjunk ra most a jegyzetbentargyalt temakorok attekintesere.
A kovetkezo fejezetben azt vizsgaljuk, hogy amennyiben a palyak pontos meghata-rozasa nelkul szeretnenk a palyak osszessege altal meghatarozott faziskepet vizsgalni,akkor milyen geometriai definıcio segıtsegevel lehet kulonbozo rendszerek faziskepeinekhasonlosagat egzakt modon megfogni. Ehhez bevezetjuk a topologikus ekvivalencia fo-galmat, amely egy ekvivalencia relacio a dinamikai rendszerek halmazan. Az ekvivalenciabevezetese utan azt vizsgaljuk, hogy milyen osztalyokat hoz ez letre, illetve, probalunk azosztalyokbol egy-egy konnyen vizsgalhato reprezentanst kivalasztani. Ezenkıvul foglal-kozunk azzal az alapveto kerdessel, hogy ha a dinamikai rendszert differencialegyenletteladjuk meg, akkor a jobboldalak alapjan hogyan dontheto el ket rendszer ekvivalenci-aja. Ezt a programot csak a linearis rendszerek osztalyozasa eseteben lehet teljesseggelveghezvinni.
A nemlinearis rendszereket a 3. Fejezetben osztalyozzuk, azonban ekkor csak azegyensulyi pontok koruli lokalis faziskepek osztalyozasa hajthato vegre. Ennek egyikeszkoze a linearizalas, amelynek lehetoseget a Hartman–Grobman-tetel teremti meg.Amennyiben a linearis rendszer nem hatarozza meg a faziskepet, akkor a faziskep szem-pontjabol meghatarozo tagok a normalformak elmeletenek segıtsegevel valaszthatok ki.
Az egyensulyi pontok koruli lokalis faziskepek vizsgalataban segıt a stabil, instabil escentralis sokasag tetel, melyeket a 4. Fejezetben targyalunk. Ezek a sokasagok a linearisrendszerek eseteben bevezetett a stabil, instabil es centralis alterek altalanosıtasai. Ezensokasagok invariansak, azaz a trajektoriak nem hagyjak el azokat. A stabil sokasag azontrajektoriakat tartalmazza, amelyek t→ +∞ eseten az egyensulyi ponthoz tartanak, azinstabil sokasag pedig azokat, amelyek t→ −∞ eseten tartanak az egyensulyi ponthoz.A centralis sokasag a fazister dimenziojanak redukalasat teszi lehetove, azaz magasabbdimenzios rendszerekben el lehet kulonıteni a fazisternek azt az alacsonyabb dimenziosreszet, amelyben a nehezen vizsgalhato trajektoriak futnak.
9

A faziskep globalis vizsgalatanak eszkozeire az 5. Fejezetben kerul sor. Ebben elo-szor attekintjuk a ketdimenzios faziskepek meghatarozasanak elemi modszereit. Ezutanreszletesen vizsgaljuk a periodikus megoldasokat. Ezek letezesere es nem-letezesere vo-natkozo ketdimenzios fazisterben alkalmazhato teteleket foglaljuk ossze eloszor, majdraterunk a periodikus megoldasok stabilitasvizsgalatara tetszoleges dimenzios fazister-ben. A fejezet vegen visszaterunk a ketdimenzios esetre, es ket fontos globalis eszkozt, avektormezo indexet es a Poincare-gombre valo vetıtessel torteno kompaktifikaciot ismer-tetjuk.
Azt ezt koveto ket fejezetben a parameterektol is fuggo rendszerek faziskepenek alaku-lasat vizsgaljuk a parameterek erteketol fuggoen. Modszereket mutatunk azon rendszerekvizsgalatara, melyeknel a parameterek valtoztatasakor minosegi valtozas kovetkezik bea faziskepben, ezeket a minosegi valtozasokat nevezzuk bifurkacionak. Reszletesen tar-gyaljuk a ket legfontosabb, ugynevezett egy-kodimenzios bifurkaciot, a nyereg-csomo esaz Andronov–Hopf-bifurkaciot.
Dinamikai rendszerek vizsgalatanak egyik fontos fejezete a kaosz definialasa es a ka-otikus rendszerek vizsgalata. Ennek eszkozeit elsosorban diszkret ideju rendszerekrefejlesztettek ki, ezert a 8. Fejezetben ezeket kulon vizsgaljuk. Bemutatjuk a fixpont esperiodikus palya lokalis vizsgalatanak alapveto eszkozeit. Bevezetunk egy kaosz definı-ciot, majd megmutatjuk, hogy bizonyos lekepezeseknek vannak kaotikus palyaik. Ehhezismertetjuk a szimbolikus dinamika fogalmat es alkalmazasanak modszeret.
Az utolso fejezet a dinamikai rendszer elmelet egy olyan iranyu kiterjeszteserol szol,amikor a fazister nem veges dimenzios. Ez peldaul parcialis differencialegyenletek esete-ben fordul elo. Ebben a fejezetben szemilinearis parabolikus parcialis differencialegyen-leteket vizsgalunk, melyeket a gyakorlatban sokszor reakcio-diffuzio egyenletnek hıvnak.Foglalkozunk a stacionarius megoldasok (melyek az egyensulyi pontnak felelnek meg)letezesenek es stabilitasanak vizsgalataval, illetve egy masik, gyakorlat szempontjabolfontos megoldas tıpussal az utazo hullamokkal. Ezek eseteben is a letezesuket es a sta-bilitasukat vizsgaljuk.
10

2. fejezet
Dinamikai rendszerek topologikusosztalyozasa
A differencialegyenletek elmeletenek fejlodese soran eloszor a differencialegyenletek meg-oldasaval foglalkoztak, igen sokfele modszert kifejlesztettek, amelyekkel specialis tıpusudifferencialegyenletek megoldasa keplettel eloallıthato. Azonban kiderult, hogy differen-cialegyenlet-rendszerek megoldasa altalaban keplettel nem adhato meg (szinte kizarolagcsak a linearis esetben), vagy ha megadhato, akkor is nehezsegekbe utkozhet, hogy amegoldas bizonyos fontos tulajdonsagait a keplet alapjan meghatarozzuk. Ketdimenziosnemlinearis rendszerek megoldasait peldaul celszeru ugy vizsgalni, hogy a trajektoriakat(palyakat) abrazoljuk a fazissıkon. Ez nem azt jelenti, hogy a megoldasgorbeket pontosanfelrajzoljuk, hanem az analızisbeli fuggvenyvizsgalathoz hasonloan jarunk el, amikor csaka fuggvenygrafikon legfontosabb alaki tulajdonsagait (monotonitas, konvexitas) vesszukfigyelembe. A ketdimenzios rendszerek megoldasainak abrazolasa soran tehat lenyegebenegy a vizsgalt rendszerrel valamilyen ertelemben ekvivalens rendszer palyait abrazoltuk(megpedig annak, amelynek palyai ’ugy neznek ki’, mint a vizsgalando rendszer palyai).Most szeretnenk ezen ekvivalencia fogalmat pontosan meghatarozni, azaz definialni azt,hogy mit ertunk azon, hogy ket rendszer faziskepe ugyanugy nez ki.
A tovabbiakban tehat a ϕ : R×M →M dinamikai rendszerek halmazan meg fogunkadni egy ekvivalenciarelaciot. Azutan az a cel, hogy meghatarozzuk a lehetseges oszta-lyokat, keressunk minden osztalybol egy konnyen vizsgalhato reprezentanst, es egyszerumodszert adjunk annak eldontesere, hogy egy adott rendszer melyik osztalyba tartozik.
2.1. Dinamikai rendszerek ekvivalenciai
Ket dinamikai rendszert ekvivalensnek fogunk nevezni, ha palyaik egy megfelelo leke-pezessel egymasba vihetok. Eloszor ezen lekepezes tıpusokat definialjuk. A diszkret esfolytonos ideju dinamikai rendszerekre egyszerre fogalmazzuk meg ezeket a definıciokat,
11

ezert a tovabbiakban jelolje T az R vagy Z szamhalmazt.
Definıcio 2.1.. Legyenek M,N ⊂ Rn halmazok. Egy h : M → N lekepezest homeo-morfizmusnak (esetenkent C0-diffeomorfizmusnak) nevezunk, ha folytonos, bijekcio es azinverze is folytonos. A lekepezest Ck-diffeomorfizmusnak nevezzuk, ha k-szor folytonosandifferencialhato, bijekcio es inverze is k-szor folytonosan differencialhato.
Definıcio 2.2.. Legyenek M,N ⊂ Rn tartomanyok, azaz osszefuggo, nyılt halmazok.Azt mondjuk, hogy a ϕ : T ×M → M es ψ : T × N → N dinamikai rendszerek Ck-ekvivalensek, (k = 0 eseten topologikusan ekvivalensek), ha van olyan h : M → N Ck-diffeomorfizmus (k = 0 eseten homeomorfizmus), mely a palyakat egymasba viszi az idoiranyıtasanak megtartasaval. Ezt a 2.1. abra szemlelteti. Reszletesebben megfogalmazva,ha letezik olyan a : T ×M → T folytonos fuggveny, melyre t 7→ a(t, p) szigoruan novobijekcio, es minden t ∈ T, valamint p ∈M eseten
h(ϕ(t, p)
)= ψ
(a(t, p), h(p)
).
2.1. abra. Topologikusan ekvivalens rendszerek palyait homeomorfizmussal egymasbalehet vinni.
A fenti definıcioban az a, illetve h fuggveny specialis valasztasaval kulonfele ekviva-lencia fogalmakat kaphatunk. A fenti altalanos ekvivalenciat fogjuk a tovabbiakban 1.tıpusunak nevezni, az alabbi fontos specialis eseteket pedig 2, 3 es 4. tıpusunak.
12

Definıcio 2.3.. Azt mondjuk, hogy a ϕ es ψ dinamikai rendszerek Ck folyam ekviva-lensek (2. tıpusu ekvivalencia), ha a fenti definıcioban a nem fugg p valasztasatol, azazletezik olyan szigoruan novo b : T → T bijekcio, melyre a(t, p) = b(t) minden p ∈ Meseten. Ekkor tehat az idoatparameterezes minden palyan ugyanaz.
Definıcio 2.4.. Azt mondjuk, hogy a ϕ es ψ dinamikai rendszerek Ck–konjugaltak (3.tıpusu ekvivalencia), ha a fenti definıcioban a(t, p) = t minden t ∈ T es p ∈ M eseten.Ekkor tehat a palyakon nincs idoatparameterezes. Ez esetben a feltetel ıgy ırhato
h(ϕ(t, p)
)= ψ
(t, h(p)
).
Definıcio 2.5.. Azt mondjuk, hogy a ϕ es ψ dinamikai rendszerek orbitalisan ekvivalen-sek (4. tıpusu ekvivalencia), ha a fenti definıcioban M = N es h = id, azaz a palyakugyanazok, csak az ido mas a ket rendszerben a palyakon.
A definıciokbol nyilvanvalo, hogy az ekvivalencia fogalmak kozott az alabbi kapcsolatall fenn.
Allıtas 2.1. 1. Ha a ϕ es ψ dinamikai rendszerek Ck–konjugaltak, akkor Ck folyamekvivalensek.
2. Ha a ϕ es ψ dinamikai rendszerek Ck folyam ekvivalensek, akkor Ck-ekvivalensek.
3. Ha a ϕ es ψ dinamikai rendszerek orbitalisan ekvivalensek, akkor Ck-ekvivalensek.Osszefoglalva, az ekvivalencia tıpusok kozott a kovetkezo osszefugges all fenn
3⇒ 2⇒ 1, 4⇒ 1.
2.1.1. Diszkret ideju dinamikai rendszerek
Diszkret ideju dinamikai rendszerek eseteben valojaban csak egyfele ekvivalencia van, eztfogalmazzuk meg a kovetkezo allıtasban. Legyenek ϕ : Z×M → M es ψ : Z×N → Ndiszkret ideju dinamikai rendszerek. Legyen f(p) = ϕ(1, p) es g(p) = ψ(1, p). Ekkor adinamikai rendszer csoporttulajdonsaga alapjan egyszeruen igazolhato, hogy ϕ(n, p) =fn(p) es ψ(n, p) = gn(p), ahol fn es gn a fuggvenyek n-szeri alkalmazasat jeloli.
Allıtas 2.2. Az alabbi allıtasok ekvivalensek.
1. A ϕ es ψ dinamikai rendszerek Ck-konjugaltak.
2. A ϕ es ψ dinamikai rendszerek Ck folyam ekvivalensek.
13

3. A ϕ es ψ dinamikai rendszerek Ck-ekvivalensek.
4. Letezik olyan h : M → N Ck-diffeomorfizmus, melyre h f = g h.
Bizonyıtas. Az elozo allıtas szerint az elso harom allıtas fentrol lefele kovetkezik egymas-bol. Eloszor igazoljuk, hogy a negyedik allıtasbol kovetkezik az elso, majd azt, hogy aharmadikbol kovetkezik a negyedik. A h f = g h egyenloseget felhasznalva
h f 2 = h f f =︸︷︷︸hf=gh
g h f =︸︷︷︸hf=gh
g g h = g2 h.
Ehhez hasonloan az h fn−1 = gn−1 h feltetelbol kovetkezik h(fn(p)
)= gn
(h(p)
),
azaz h(ϕ(n, p)
)= ψ
(n, h(p)
)minden n es p eseten, amely eppen a ϕ es ψ dinamikai
rendszerek Ck-konjugaltsagat jelenti.Tegyuk fel most, hogy a ϕ es ψ dinamikai rendszerek Ck-ekvivalensek. Vegyuk eszre
eloszor, hogy, ha r : Z → Z szigoruan novo bijekcio, akkor van olyan k ∈ Z, mellyelr(n) = n+k minden n ∈ Z eseten. Ugyanis a szigoru monotonitas miatt r(n+1) > r(n),viszont mivel r bijekcio, azert r(n + 1) es r(n) kozott nem lehet egesz szam, tehatr(n + 1) = r(n) + 1. Igy bevezetve a k = r(0) szamot, indukcioval az r(n) = n + kosszefuggeshez jutunk. Tehat a Ck-ekvivalencia definıciojaban szereplo a fuggvenyrefennall, hogy minden p ∈ M ponthoz van olyan kp ∈ Z egesz szam, mellyel a(n, p) =n+ kp. Tehat ϕ es ψ Ck-ekvivalenciaja azt jelenti, hogy minden n ∈ Z es minden p ∈Meseten
h(ϕ(n, p)
)= ψ
(n+ kp, h(p)
),
azazh(fn(p)
)= gn+kp
(h(p)
).
Alkalmazzuk ezt az osszefuggest eloszor n = 0 eseten. Ekkor h(p) = gkp(h(p)). Ezutann = 1 eseten
h(f(p)
)= g1+kp
(h(p)
)= g(gkp(h(p)
))= g(h(p)
),
ami eppen a kıvant allıtast adja.
Allıtas 2.3. A ϕ es ψ dinamikai rendszerek pontosan akkor orbitalisan ekvivalensek, haegyenlok.
Bizonyıtas. Ha a ket dinamikai rendszer egyenlo, akkor nyilvan orbitalisan ekvivalensek.Fordıtva, amennyiben orbitalisan ekvivalensek, akkor Ck-ekvivalensek is, ıgy az elobbiallıtas szerint h f = g h, viszont h = id miatt f = g, tehat ϕ(n, p) = ψ(n, p) barmelyn ∈ Z eseten, azaz a ket dinamikai rendszer azonos.
Definıcio 2.6.. Diszkret ideju esetben, azaz T = Z eseten, az f es g lekepezest, illetvea megfelelo diszkret dinamikai rendszereket Ck-konjugaltaknak nevezzuk, ha van olyan hCk- diffeomorfizmus, melyre h f = g h.
14

Megjegyzes 2.1. Ebben az esetben az f es g fuggveny csak koordinata-transzformacio-ban kulonbozik egymastol.
Allıtas 2.4. Ha k > 1 eseten f es g Ck-konjugaltak, valamint p ∈ M fixpontja az flekepezesnek (ekkor nyilvan h(p) fixpontja g-nek), akkor az f ′(p) es g′(h(p)) matrixokhasonloak.
Bizonyıtas. Derivaljuk a h f = g h egyenloseget a p pontban, es hasznaljuk fel, hogyf(p) = p, valamint g(h(p))=h(p). Ekkor h′(p)f ′(p) = g′(h(p))h′(p), melyet megszoroz-hatunk a h′(p) matrix inverzevel (amely azert letezik, mert h Ck- diffeomorfizmus). Igyaz f ′(p) es g′(h(p)) matrixok valoban hasonloak.
Megjegyzes 2.2. A fenti allıtas miatt a Ck-konjugaltsag tul finom osztalyozast ad k ≥1-re, hiszen peldaul az f(x) = 2x es g(x) = 3x fuggvenyek az allıtas szerint nem Ck-konjugaltak (az egyik matrix sajaterteke 2, a masike 3), viszont az altaluk meghatarozottxn+1 = 2xn es xn+1 = 3xn dinamikai rendszerek palyainak viselkedese kozott nem szeret-nenk kulonbseget tenni. Latni fogjuk, azonban, hogy a ket fuggveny C0-konjugalt, azazk = 0-ra nem igaz az allıtas.
2.1.2. Folytonos ideju dinamikai rendszerek
Terjunk ra most a folytonos ideju dinamikai rendszerek ekvivalenciainak vizsgalatara,legyen tehat most T = R, es legyenek ϕ : R×M →M valamint ψ : R×N → N folytonosideju dinamikai rendszerek. Ekkor megadhatok olyan f : M → Rn es g : N → Rn
fuggvenyek, melyekre x = f(x) megoldasa a ϕ, es y = g(y) megoldasa a ψ dinamikairendszer.
Allıtas 2.5. 1. Legyen k ≥ 1. Ekkor a ϕ es ψ dinamikai rendszerek pontosan akkorCk-konjugaltak, ha letezik olyan h : M → N Ck-diffeomorfizmus, mellyel h′ · f =g h.
2. Tegyuk fel, hogy a t 7→ a(t, p) fuggveny differencialhato. Ekkor a ϕ es ψ dinamikairendszerek pontosan akkor orbitalisan ekvivalensek, ha letezik olyan v : M → R+,mellyel g = f · v.
3. A 2.1. Allıtasban a kovetkeztetesek nem fordıthatok meg.
Bizonyıtas. 1. Tegyuk fel eloszor, hogy a ϕ es ψ dinamikai rendszerek Ck-konjugaltak.Ekkor letezik olyan h : M → N Ck-diffeomorfizmus, mellyel h(ϕ(t, p)) = ψ(t, h(p)).Derivaljuk ezt az egyenletet t szerint, ekkor h′(ϕ(t, p)) · ϕ(t, p) = ψ(t, h(p)). Mivel x =f(x) megoldasa a ϕ, es y = g(y) megoldasa a ψ, azert
h′(ϕ(t, p)) · f(ϕ(t, p)) = g(ψ(t, h(p))).
15

Alkalmazzuk ezt t = 0 eseten, ekkor
h′(ϕ(0, p)) · f(ϕ(0, p)) = g(ψ(0, h(p))),
azaz h′(p)·f(p) = g(h(p)). Ezzel az allıtas egyik iranyat igazoltuk. Tegyuk fel most, hogyletezik olyan h : M → N Ck-diffeomorfizmus, mellyel h′ · f = g h. Legyen ψ∗(t, q) :=h(ϕ(t, h−1(q))), igazoljuk, hogy ez megoldasa y = g(y) differencialegyenletnek, ıgy azegyertelmuseg miatt ψ∗ = ψ, melybol a kıvant allıtas kovetkezik, hiszen ψ∗ definıciojabana q = h(p) helyettesıtest elvegezve ϕ es ψ Ck-konjugaltagat kapjuk. Egyreszt ψ∗(0, q) :=h(ϕ(0, h−1(q))) = q, masreszt
ψ∗(t, q) = h′(ϕ(t, h−1(q))) · ϕ(t, h−1(q))
= h′(h−1(ψ∗(t, q))) · f(h−1(ψ∗(t, q))) = g(ψ∗(t, q)),
mellyel a kıvant allıtast igazoltuk.2. Tegyuk fel eloszor, hogy a ϕ es ψ dinamikai rendszerek orbitalisan ekvivalensek.
Ekkor ϕ(t, p) = ψ(a(t, p), p), melyet t szerint derivalva a ϕ(t, p) = ψ(a(t, p), p) · a(t, p)egyenlethez jutunk. Mivel x = f(x) megoldasa a ϕ, es y = g(y) megoldasa a ψ, azertf(ϕ(t, p)) = g(ψ(a(t, p)), p)). Alkalmazzuk ezt t = 0 eseten, ekkor f(p) = g(p) · a(0, p),melybol a bizonyıtando allıtast kapjuk a v(p) = a(0, p) fuggveny bevezetesevel. Tegyukfel most, hogy letezik olyan v : M → R+, mellyel g = f · v. Legyen p ∈ Rn, es rovidsegkedveert vezessuk be az x(t) = ϕ(t, p) jelolest. Legyen
b(t) =
∫ t
0
1
v(x(s))ds,
ekkor b(t) = 1/v(x(t)) > 0, ıgy a b fuggvenynek van inverze, legyen ez a = b−1. (Ezfugg a p valasztasatol is, ezert hasznalhatjuk az a(t, p) = b−1(t) jelolest is.) Legyeny(t) = x(a(t, p)), ekkor
y(t) = x(a(t, p))a(t, p) = f(x(a(t, p)))1
b(a(t, p))= f(y(t))v(y(t)) = g(y(t)).
Igy y megoldasa az y(t) = g(y(t)) differencialegyenletnek, es teljesıti az y(0) = p kezdetifeltetelt, ezert y(t) = ψ(t, p). Ezzel az y(t) = x(a(t, p)) definialo egyenloseg alapjan akıvant ψ(t, p) = ϕ(a(t, p), p) osszefuggeshez jutunk.
3. Ezen allıtas bizonyıtasahoz ellenpeldakat adunk meg.
(i) Legyen A =
(0 1−1 0
)es B =
(0 2−2 0
). Ekkor az x = Ax es y = By differencial-
egyenletek faziskepe azonos, mindketto centrum, azonban a megoldasok periodusaa ket rendszerben kulonbozo. Igy amennyiben a palyakat egymasba kepezzuk,akkor az idoatparameterezese szukseges, azaz a ket rendszer nem Ck–konjugalt,viszont Ck folyam-ekvivalens.
16

(ii) Ha a ϕ es ψ dinamikai rendszerben van ket-ket periodikus palya, melyeken a peri-odusok aranya kulonbozo, akkor a ket rendszer nem Ck-folyam-ekvivalens, viszontlehetnek Ck-ekvivalensek.
(iii) Legyen A =
(1 00 −1
)es B =
(1 00 −2
). Ekkor az x = Ax es y = By differen-
cialegyenletek faziskepe nyeregpont, azaz C0-ekvivalensek, viszont a palyak nemazonosak, ezert nem orbitalisan ekvivalensek.
2.2. Linearis rendszerek Ck-osztalyozasa
Ebben a szakaszban az x = Ax alaku linearis egyenleteket, illetve az xn+1 = Axn li-nearis diszkret ideju rendszereket fogjuk osztalyozni az elobbi szakaszban ismertetettekvivalenciak szerint. Vezessuk be az
L(Rn) = A : Rn → Rn linearis lekepezes
es aGL(Rn) = A ∈ L(Rn) : detA 6= 0
tereket. Ha A ∈ L(Rn), akkor az A matrixot az x = Ax linearis differencialegyenletjobboldalanak tekintjuk, ha pedig A ∈ GL(Rn), akkor az A matrixot az xn+1 = Axndiszkret rendszert meghatarozo lekepezeskent kezeljuk. Igy L(Rn) a folytonos, GL(Rn)pedig a diszkret ideju linearis rendszereket reprezentalja. A linearis rendszerek esete-ben a matrix altal meghatarozott dinamikai rendszer explicit modon megadhato. HaA ∈ L(Rn), akkor az altala meghatarozott dinamikai rendszer, (azaz az x = Ax differen-cialegyenlet megoldasa) ϕ(t, p) = eAtp. Ha A ∈ GL(Rn), akkor az altala meghatarozottdinamikai rendszer, (azaz az xn+1 = Axn rekurzio explicit megoldasa) ψ(n, p) = Anp. Atovabbiakban ket matrix valamely tıpusu ekvivalenciajan az altaluk meghatarozott dina-mikai rendszerek ekvivalenciajat ertjuk. Hasznalni fogjuk meg a kovetkezo ekvivalenciafogalmat.
Definıcio 2.7.. Az A es B matrixok linearisan ekvivalensek, ha letezik olyan α > 0 esP invertalhato matrix, mellyel A = αPBP−1
Allıtas 2.6. Legyen T = R es k ≥ 1.
1. Az A,B ∈ L(Rn) matrixok pontosan akkor Ck-konjugaltak, ha hasonlok.
2. Az A,B ∈ L(Rn) matrixok pontosan akkor Ck-ekvivalensek, ha linearisan ekviva-lensek.
17

Bizonyıtas. 1. Tegyuk fel, hogy az A es B matrixok Ck-konjugaltak, azaz letezik olyanh : Rn → Rn Ck-diffeomorfizmus, mellyel h(ϕ(t, p)) = ψ(t, h(p)), azaz h(eAtp) = eBth(p).Derivaljuk ezt p szerint, ekkor h′(eAtp) · eAt = eBth′(p), majd helyettesıtsunk p helyerenullat h′(0)eAt = eBt · h′(0). Derivaljunk most t szerint, ekkor a h′(0)eAt · A = eBt ·B · h′(0) egyenlethez jutunk, melybol a t = 0 helyettesıtessel a h′(0)A = B · h′(0)osszefuggest kapjuk. Mivel h diffeomorfizmus, azert a h′(0) matrixnak van inverze, ezzelmegszorozva az egyenletet A = h′(0)−1Bh′(0), azaz az A es B matrixok hasonlok. Tegyukfel most, hogy azA esB matrixok hasonlok, azaz van olyan P invertalhato matrix, mellyelA = P−1BP . Ekkor a h(p) = Pp linearis fuggveny olyan Ck-diffeomorfizmus, amely apalyakat egymasba kepezi az iranyıtas megtartasaval, ugyanis PeAtp = PeP
−1BPtp =eBtPp.
2. Tegyuk fel, hogy az A es B matrixok Ck-ekvivalensek, azaz letezik olyan h :Rn → Rn Ck-diffeomorfizmus, es a : R × Rn → R differencialhato fuggveny, melyekkelh(ϕ(t, p)) = ψ(a(t, p), h(p)), azaz h(eAtp) = eBa(t,p)h(p). Derivaljuk ezt p szerint, majdhelyettesıtsunk p helyere nullat, ekkor h′(0)eAt = eBa(t,0) · h′(0). Derivaljunk most tszerint, ekkor a h′(0)eAt ·A = eBa(t,0) ·Ba(t, 0) ·h′(0) egyenlethez jutunk, melybol a t = 0helyettesıtessel a h′(0)A = Ba(0, 0) · h′(0) osszefuggest kapjuk. Mivel h diffeomorfizmus,azert a h′(0) matrixnak van inverze, ezzel megszorozva az egyenletet, es bevezetve azα = a(0, 0) jelolest, A = αh′(0)−1Bh′(0), azaz azA esB matrixok linearisan ekvivalensek.Tegyuk fel most, hogy az A es B matrixok linearisan ekvivalensek, azaz van olyan Pinvertalhato matrix es α > 0, melyekkel A = αP−1BP . Ekkor a h(p) = Pp linearisfuggveny olyan Ck-diffeomorfizmus, amely a palyakat egymasba kepezi az a(t, p) = αtidoatparameterezessel, ugyanis PeAtp = PeαP
−1BPtp = eBαtPp.
Megjegyzes 2.3. A fenti allıtas miatt a Ck-konjugaltsag es ekvivalencia tul finom osz-
talyozast ad k ≥ 1-re. Hiszen peldaul az A =
(−1 00 −1
)es B =
(−1 00 −2
)matrixok az
allıtas szerint nem Ck-konjugaltak, es nem is Ck-ekvivalensek, viszont mindketto stabilcsomot hataroz meg, ıgy a dinamikai rendszerek palyainak viselkedese kozott nem sze-retnenk kulonbseget tenni. Latni fogjuk azonban, hogy a ket matrix C0-konjugalt, azazk = 0-ra nem igaz az allıtas.
Allıtas 2.7. Legyen T = Z es k ≥ 1. Az A,B ∈ GL(Rn) matrixok pontosan akkorCk-konjugaltak, ha hasonlok.
Bizonyıtas: Tegyuk fel, hogy az A es B matrixok Ck-konjugaltak, azaz a 2.2. Allıtasszerint letezik olyan h : Rn → Rn Ck-diffeomorfizmus, mellyel h(Ap) = Bh(p). Deri-valjuk ezt p szerint, ekkor h′(Ap)A = Bh′(p), majd helyettesıtsunk p helyere nullat, ıgyh′(0)A = Bh′(0). Mivel h diffeomorfizmus, azert a h′(0) matrixnak van inverze, ezzelmegszorozva az egyenletet A = h′(0)−1Bh′(0), azaz az A es B matrixok hasonlok. Te-gyuk fel most, hogy az A es B matrixok hasonlok, azaz van olyan P invertalhato matrix,
18

mellyel A = P−1BP . Ekkor a h(p) = Pp linearis fuggveny olyan Ck-diffeomorfizmus,amely a palyakat egymasba kepezi az iranyıtas megtartasaval, ugyanis PAp = BPp.
2.3. Linearis rendszerek C0-osztalyozasa
Ebben a szakaszban a kovetkezo kerdeseket vizsgaljuk.
1. Adott A,B ∈ L(Rn) matrixokrol hogy lehet eldonteni, hogy C0–ekvivalensek, vagyC0–konjugaltak?
2. Adott A,B ∈ GL(Rn) matrixokrol hogy lehet eldonteni, hogy C0–konjugaltak?
Vizsgaljuk a kerdest eloszor az n = 1 dimenzios esetben.
2.3.1. Folytonos ideju eset n = 1 dimenzioban
Tekintsuk az x = ax differencialegyenletet. Ha a < 0, akkor az origo globalisan aszimp-totikusan stabilis, azaz minden megoldas az origohoz tart. Ha a > 0, akkor az origoinstabilis, a megoldasok vegtelenhez tartanak. Ha a = 0, akkor minden pont egyensu-lyi pont. A 2.2. abran lathato a haromfele faziskep pozitıv, negatıv es nulla a ertekekeseten. Tehat az x = ax es y = by rendszerek, melyekben a, b ∈ R pontosan akkorC0-ekvivalensek, ha sgn a = sgn b. (A homeomorfizmus ez esetben lehet az identitas.)
2.2. abra. Egyvaltozos, folytonos ideju linearis rendszerek harom osztalya.
19

2.3.2. Diszkret ideju eset n = 1 dimenzioban
Tekintsuk az xn+1 = axn rekurzioval definialt diszkret ideju dinamikai rendszert kulon-bozo a ∈ R \ 0 ertekek eseten. Megjegyezzuk, hogy a GL(R) halmaz azonosıthato azR\0 halmazzal. Mivel a rekurzio mertani sorozatot definial, azert a palyak viselkedeseegyszeruen megallapıthato. Az alabbi hat osztalyt kapjuk a C0-ekvivalencia szerint.
1. Ha a > 1, akkor pozitıv x0 eseten szigoruan novo a sorozat, a 0 instabil fixpont.
2. Ha a = 1, akkor minden pont fixpont.
3. Ha 0 < a < 1, akkor a 0 stabil fixpont, minden megoldas 0-hoz tart monotoncsokkenoen.
4. Ha −1 < a < 0, akkor a 0 stabil fixpont, minden megoldas 0-hoz tart, azonbanelojelvalto modon, ezert ez nem ekvivalens az elozovel, mert a homeomorfizmusszakaszt szakaszba visz.
5. Ha a = −1, akkor a megoldas oszcillal.
6. Ha a < −1, akkor 0 instabil fixpont, azonban a sorozat elojelvalto, ıgy ez nemekvivalens az a > 1 esettel.
Az osztalyozas formalis igazolasahoz megadjuk a homeomorfizmust, amely a C0-ekvivalenciat adja. Adott a, b ∈ R \ 0 eseten keresunk olyan h : R→ R homeomorfiz-must, melyre h(ax) = bh(x) teljesul minden x eseten. Keressuk a h homeomorfizmust akovetkezo alakban:
h(x) =
xα ha x > 0−(−x)α ha x < 0
Ha a, b > 0 es x > 0, akkor a h(ax) = bh(x) egyenletbol aαxα = bxα, ıgy aα = b,azaz α = ln b
ln a. A h fuggveny homeomorfizmus, ha α > 0, ez pedig akkor teljesul, ha a
es b az 1 ugyanazon oldalon helyezkedik el. Tehat, ha a, b > 1, akkor a ket rendszerC0-konjugalt, illetve, ha a, b ∈ (0, 1), akkor is C0-konjugaltak. (Egyszeruen lathato,hogy negatıv x ertekek eseten is fennall a h(ax) = bh(x) egyenloseg.) Hasonlo modonlathato, hogy ha a, b < −1, akkor a ket rendszer C0-konjugalt, illetve, ha a, b ∈ (−1, 0),akkor is C0-konjugaltak. A fenti h(x) = |x|αsgn(x) homeomorfizmus segıtsegevel tehatigazolhatjuk, hogy a C0-konjugaltsag szerint a GL(R) halmaz legfeljebb hat osztalyrabonthato. Egyszeruen igazolhato, hogy valoban hat osztaly van, tehat a fenti kulonbozoosztalyok elemei egymassal valoban nem C0-konjugaltak, azaz nem adhato meg mashomeomorfizmus, amely egymasba vinne a palyaikat.
20

2.3.3. Folytonos ideju eset n-dimenzioban
Tekintsuk az x = Ax linearis differencialegyenlet-rendszert, ahol A n × n meretu mat-rix. A C0-osztalyozast a stabil, instabil es centralis alterek segıtsegevel lehet jellemezni,ezek definıciojat es legfontosabb tulajdonsagait foglaljuk ossze eloszor. Jelolje a matrixsajatertekeit multiplicitassal λ1, λ2, . . . , λn. Jelolje u1, u2, . . . , un azt a bazist Rn-ben,amely a matrix valos Jordan-normalformajat adja. Ezen bazis altalanos meghatarozasahosszabb elokeszıtest igenyel, azonban a leggyakoribb es a tovabbiakban elofordulo ese-tekben a bazis az alabbi modon egyszeruen meghatarozhato. Ha a sajatertekek valosakes kulonbozok, akkor a baziselemek eppen a megfelelo sajatvektorok. Ha vannak komp-lex konjugalt sajatertek parok, akkor az ezeknek megfelelo komplex sajatvektor valos eskepzetes resze van a bazisban. Tobbszoros sajatertekek eseten az altalanosıtott sajatvek-torok kerulnek a bazisba, ha a sajatalter dimenzioja kisebb, mint a sajatertek algebraimultiplicitasa. Ha peldaul λ ketszeres sajatertek, de csak egydimenzios sajatalter tarto-zik hozza, akkor az altalanosıtott v sajatvektort az Av = λv+u egyenlet hatarozza meg,ahol u az egydimenzios sajatalteret kifeszıto sajatvektor. Megjegyezzuk, hogy ekkor volyan u-tol fuggetlen vektor, melyre (A−λI)2v = 0, ugyanis (A−λI)2v = (A−λI)u = 0.Ezen bazis segıtsegevel az alabbi modon definialhato linearis rendszerek stabil, instabiles centralis altere.
Definıcio 2.8.. Legyen egy az A valos normalalakjat meghatarozo bazis u1, . . . , un ⊂Rn. Jelolje λk azt a sajaterteket, amelyhez az uk bazisvektor tartozik (uk nem feltetlenulsajatvektor). Az
Es(A) = 〈uk : Reλk < 0〉, Eu(A) = 〈uk : Reλk > 0〉,
Ec(A) = 〈uk : Reλk = 0〉
altereket rendre az x = Ax linearis differencialegyenlet-rendszer stabilis, instabilis, cent-ralis alterenek nevezzuk. (〈·〉 a zarojelben levo vektorok altal kifeszıtett alteret jeloli.)
Ezek legfontosabb tulajdonsagai az alabbi tetelben foglalhatok ossze.
Tetel 2.9.. Az Es(A), Eu(A), Ec(A) alterek rendelkeznek az alabbi tulajdonsagokkal:
1. Es(A)⊕ Eu(A)⊕ Ec(A) = Rn
2. Invariansak A-ra (azaz A(Ei(A)) ⊂ Ei(A), i = s, u, c), es eAt-re.
3. Minden p ∈ Es(A) eseten eAtp → 0, ha t → +∞, sot van olyan K,α > 0, hogy|eAtp| ≤ Ke−αt|p|, ha t ≥ 0.
4. Minden p ∈ Eu(A) eseten eAtp → 0, ha t → −∞, sot van olyan L, β > 0, hogy|eAtp| ≤ Leβt|p|, ha t ≤ 0.
21

Az invarians altereket egyszeruen szemleltethetjuk az A =
(1 00 −1
)matrix altal
meghatarozott nyeregpont eseteben. Ekkor a matrix sajatertekei 1 es −1, az ezekheztartozo sajatvektorok pedig (1, 0)T es (0, 1)T . Igy a stabilis alter a fuggoleges, az instabilisalter pedig a vızszintes koordinata tengely, amint a 2.3. abra mutatja.
2.3. abra. Nyeregpont eseten a stabilis es instabilis alter egydimenzios.
A C0-osztalyozasban az invarians alterek dimenzioja fog alapveto szerepet jatszani,erre vezetunk be jeloleseket az alabbi definıcioban.
Definıcio 2.10.. Az A matrix stabil alterenek dimenziojat jelolje s(A) = dim(Es(A)),instabil alterenek dimenziojat u(A) = dim(Eu(A)), illetve centralis alterenek dimenziojatc(A) = dim(Ec(A)).
Egy A matrix spektrumat, azaz sajatertekeinek halmazat σ(A) fogja jelolni. Fontosszerepet fognak jatszani az alabbi rendszerek.
EL(Rn) = A ∈ L(Rn) : Reλ 6= 0, ∀λ ∈ σ(A),
melynek elemeit hiperbolikus matrixoknak fogjuk nevezni a folytonos ideju esetben.Eloszor a hiperbolikus rendszerek C0-osztalyozasat fogjuk elvegezni, ehhez szukse-
gunk lesz az alabbi lemmara.
Lemma 2.11.. 1. Ha s(A) = n, akkor az A es −I matrixok C0-konjugaltak.
2. Ha u(A) = n, akkor az A es I matrixok C0-konjugaltak.
22

Bizonyıtas. Csak az elso allıtast igazoljuk, a masodik kovetkezik ebbol, ha azt a −Amatrixra alkalmazzuk. Negy lepesben bizonyıtunk.a. Az x = Ax differencialegyenlet p pontbol indulo megoldasa x(t) = eAtp, az y = −y
megoldasa y(t) = e−tp. A kvadratikus Ljapunov-fuggvenyekrol szolo tetel szerint letezikolyan B ∈ Rn×n pozitıv definit szimmetrikus matrix, hogy a QB(p) = 〈Bp, p〉 kvadratikusalakra LAQB negatıv definit. Jelolje S := p ∈ Rn : QB(p) = 1, az ezen kvadratikusalak altal meghatarozott ellipszoidot.b. Az x = Ax differencialegyenlet barmely nem nulla megoldasa pontosan egyszer
metszi az S halmazt, azaz minden p ∈ Rn \ 0 ponthoz letezik egyetlen τ(p) ∈ R, hogyeAτ(p)p ∈ S. Ugyanis a V ∗(t) = QB(eAtp) fuggveny minden p ∈ Rn \0 eseten szigoruanmonoton fogyo, es lim+∞V
∗ = 0, lim−∞V∗ = +∞. Nyilvan τ : Rn \ 0 → R folytonos
fuggveny, valamint τ(eAtp) = τ(p)− t.c. A ket rendszer palyait egymasba kepezo homeomorfizmus legyen
h(p) := e(A+I)τ(p)p, ha p 6= 0, es h(0) = 0.
Ennek hatasa a kovetkezokeppen szemleltetheto. A lekepezes a p pontot elviszi az Shalmazra az x = Ax palyajan, majd ezt a pontot ugyanannyi ideig (τ(p) ideig) visszavisziaz y = −y palyajan, lasd a 2.4. abran.d. Igazoljuk, hogy h homeomorfizmus, es a palyakat egymasba kepezi. Az utobbi azt
jelenti, hogy h(eAtp) = e−th(p). Ez p = 0 eseten nyilvanvalo, p 6= 0 eseten pedig
h(eAtp) = e(A+I)τ(eAtp)eAtp = e(A+I)(τ(p)−t)eAtp = e(A+I)τ(p)e−tp = e−th(p).
Mivel L−IQB = Q−2B negatıv definit, azaz y = −y palyai az S halmazt csak egyszermetszik, azert h bijekcio (az inverze is hasonloan felırhato). A τ fuggveny folytonossagamiatt h es h−1 is folytonos a 0 ponton kıvul. Tehat mar csak a 0-beli folytonossagot kelligazolni. Ehhez megmutatjuk, hogy
limp→0
eτ(p)eAτ(p)p = 0.
Mivel eAτ(p)p ∈ S es S korlatos, azert eleg igazolni, hogy limp→0 τ(p) = −∞, azaz barmelyT pozitıv szamhoz letezik olyan δ > 0, hogy legalabb T ido kell amıg egy megoldas azS halmazrol a Bδ(0) gombbe eljut. Ehhez megmutatjuk, hogy letezik olyan γ < 0, hogyminden p ∈ S pontra eγt ≤ QB(eAtp), azaz a megoldasok nullahoz tartasa alulrol iskorlatozott. (Nyilvan ekkor |eAtp| is alulrol becsulheto.) Legyen C az a negatıv definitmatrix melyre LAQB = QC . A C matrix negatıv, es a B matrix pozitıv definitasamiatt letezik olyan α < 0 es β > 0, hogy QC(p) ≥ α|p|2 es QB(p) ≥ β|p|2 mindenp ∈ Rn eseten. Vezessuk be a V ∗(t) := QB(eAtp) (p ∈ S tetszoleges) fuggvenyt. EkkorV ∗(t) = QC(eAtp), tehat V ∗(t)QB(eAtp) = V ∗(t)QC(eAtp), melybol βV ∗(t) ≥ αV ∗(t).Legyen γ := α
β. Ekkor a Gronwall-lemma legegyszerubb valtozata szerint V ∗(t) ≥ eγt,
amit igazolni akartunk.
23

2.4. abra. A h lekepezes, amely az x = Ax rendszer palyait az y = −y rendszer palyairakepezi le.
Ezen lemma felhasznalasaval egyszeruen igazolhato a hiperbolikus rendszerek oszta-lyozasarol szolo alabbi tetel.
Tetel 2.12.. Az A,B ∈ EL(Rn) hiperbolikus matrixok pontosan akkor C0-konjugaltakes egyben C0-ekvivalensek, ha s(A) = s(B). (Ekkor termeszetesen u(A) = u(B) is igaz,mivel a centralis alterek nulla dimenziosak.)
A nem hiperbolikus rendszerek C0-osztalyozasa az alabbi mely tetelen alapszik, eztbizonyıtas nelkul kozoljuk, a bizonyıtas meghaladja ezen jegyzet kereteit.
Tetel 2.13. (Kuiper). Legyenek A,B ∈ L(Rn) olyan matrixok, melyekre c(A) = c(B) =n. Ezek pontosan akkor C0-ekvivalensek, ha linearisan ekvivalensek.
A fenti ket tetelbol kovetkezik az alabbi teljes osztalyozas.
Tetel 2.14.. Az A,B ∈ L(Rn) matrixok pontosan akkor C0-ekvivalensek, ha s(A) =s(B), u(A) = u(B) es a centralis alterukre megszorıtva linearisan ekvivalensek (azazA|Ec es B|Ec linearisan ekvivalensek).
Pelda 2.1. Megmutatjuk, hogy a ketvaltozos linearis differencialegyenlet-rendszerek tere,azaz L(R2) nyolc osztalyra bonthato C0-ekvivalencia szerint. Az osztalyokat a centralisalter dimenzioja szerint soroljuk fel.
24

1. Ha c(A) = 0, akkor a stabil alter dimenzioja 0, 1 vagy 2 lehet ıgy harom osztalyvan. Ezek egy-egy egyszeru reprezentansa
A =
(1 00 1
), A =
(1 00 −1
), A =
(−1 00 −1
),
melyek rendre megfelelnek az instabil csomonak, vagy fokusznak, a nyeregnek, il-letve a stabil csomonak, vagy fokusznak. (A fokusz es a csomo egymassal C0-konjugaltak.) A faziskepeket a 2.5., 2.6., 2.7. abrakon lathatjuk.
2.5. abra. Instabil csomo.
2.6. abra. Nyeregpont.
25

2.7. abra. Stabil csomo.
2. Ha c(A) = 1, akkor a stabil alter dimenzioja 0 vagy 1 lehet, ıgy ket osztaly van.Ezek egy-egy egyszeru reprezentansa
A =
(1 00 0
), A =
(−1 00 0
).
A faziskepeket a 2.8. es 2.9. abrakon lathatjuk.
2.8. abra. Vegtelen sok instabil egyensulyi pont.
3. Ha c(A) = 2, akkor a linearis ekvivalencia szerinti osztalyokat kell meghatarozni.Ha a nulla ketszeres sajatertek, akkor ket osztalyt kapunk, a tiszta kepzetes sajat-
26

2.9. abra. Vegtelen sok stabil egyensulyi pont.
ertekekkel rendelkezo matrixok pedig linearisan ekvivalensek egymassal. Igy haromosztalyt kapunk, ezek egy-egy egyszeru reprezentansa
A =
(0 00 0
), A =
(0 10 0
), A =
(0 −11 0
).
A legutolso megfelel a centrum pontnak, a masik ketto nem kapott kulon elnevezest.A faziskepeket a 2.10., 2.11., 2.12. abrakon lathatjuk.
2.10. abra. Minden pont egyensulyi pont.
A fentihez hasonloan igazolhato, hogy a haromvaltozos linearis differencialegyenlet-rendszerek tere, azaz L(R3) 17 osztalyra bonthato C0-ekvivalencia szerint.
27

2.11. abra. Egy egyenesen elhelyezkedo elfajult egyensulyi pontok.
2.12. abra. Centrumpont.
Az L(R4) halmazt vegtelen sok osztalyra bontja a C0-ekvivalencia, azaz vegtelen sokkulonbozo negy dimenzios linearis faziskep van.
2.3.4. Diszkret ideju eset n-dimenzioban
Tekintsuk az xk+1 = Axk rekurzioval definialt diszkret ideju linearis rendszert, ahol An× n meretu matrix. A C0-osztalyozast most is a stabil, instabil es centralis alterek se-gıtsegevel lehet jellemezni, ezek definıciojat es legfontosabb tulajdonsagait foglaljuk osszeeloszor. Jelolje a matrix sajatertekeit multiplicitassal λ1, λ2, . . . , λn. Jelolje u1, u2, . . . , un
28

azt a bazist Rn-ben, amely a matrix valos Jordan-normalformajat adja. Ezen bazis se-gıtsegevel az alabbi modon definialhato linearis rendszerek stabil, instabil es centralisaltere.
Definıcio 2.15.. Legyen egy az A valos normalalakjat meghatarozo bazis u1, . . . , un ⊂Rn. Jelolje λk azt a sajaterteket, amelyhez az uk bazisvektor tartozik (uk nem feltetlenulsajatvektor). Az
Es(A) = 〈uk : |λk| < 1〉, Eu(A) = 〈uk : |λk| > 1〉,
Ec(A) = 〈uk : |λk| = 1〉
altereket rendre az A ∈ GL(Rn) lekepezes stabilis, instabilis es centralis alterenek nevez-zuk. (〈·〉 a zarojelben levo vektorok altal kifeszıtett alteret jeloli.)
Ezek legfontosabb tulajdonsagai az alabbi tetelben foglalhatok ossze.
Tetel 2.16.. Az Es(A), Eu(A), Ec(A) alterek rendelkeznek az alabbi tulajdonsagokkal:
1. Es(A)⊕ Eu(A)⊕ Ec(A) = Rn
2. Invariansak A-ra (azaz A(Ei(A)) ⊂ Ei(A), i = s, u, c).
3. Minden p ∈ Es(A) eseten Anp→ 0, ha n→ +∞.
4. Minden p ∈ Eu(A) eseten A−np→ 0, ha n→ +∞.
A C0-osztalyozasban az invarians alterek dimenzioja fog alapveto szerepet jatszani,erre vezetunk be jeloleseket az alabbi definıcioban.
Definıcio 2.17.. Az A matrix stabil alterenek dimenziojat jelolje s(A) = dim(Es(A)),instabil alterenek dimenziojat u(A) = dim(Eu(A)), illetve centralis alterenek dimenziojatc(A) = dim(Ec(A)).
Fontos szerepet fognak jatszani az alabbi rendszerek.
HL(R) = A ∈ GL(Rn) : |λ| 6= 1∀λ ∈ σ(A),
melynek elemeit szinten hiperbolikus matrixoknak fogjuk nevezni, de a diszkret idejuesetben.
A hiperbolikus rendszerek C0-osztalyozasahoz fel fogjuk hasznalni az alabbi lemmat.
Lemma 2.18.. Legyenek az A,B ∈ HL(Rn) matrixok C0-konjugaltak, azaz letezik olyanh : Rn → Rn homeomorfizmus, melyre h(Ax) = Bh(x) minden x ∈ Rn eseten. Ekkor
1. h(0) = 0,
29

2. h(Es(A)
)= Es(B), azaz a h stabil alteret stabil alterbe visz; h
(Eu(A)
)= Eu(B),
azaz h instabil alteret instabil alterbe visz,
3. s(A) = s(B), u(A) = u(B).
Bizonyıtas. 1. A h(Ax) = Bh(x) egyenletbol az x = 0 helyettesıtessel a h(0) = Bh(0)osszefuggest kapjuk, melybol h(0) = 0, ugyanis a B matrix hiperbolikus, tehat az 1 nemsajaterteke.
2. Legyen x ∈ Es(A), ekkor An → 0, amint n → ∞, ıgy h(Anx) = Bnh(x) miattBnh(x) is nullahoz tart. Ebbol az kovetkezik, hogy h(x) a B stabil altereben van, tehatazt kaptuk, hogy h
(Es(A)
)⊂ Es(B). Hasonlo ervelest alkalmazva a h−1 fuggvenyre, azt
kapjuk, hogy h−1(Es(A)
)⊂ Es(B), melybol Es(B) ⊂ h
(Es(A)
). Mivel mindket iranyu
tartalmazas fennall, azert a ket halmaz azonos: h(Es(A)
)= Es(B).
3. Mivel Es(A) homeomorfizmussal atviheto az Es(B) alterbe, azert dimenziojukegyenlo, azaz s(A) = s(B), melybol u(A) = u(B) is kovetkezik, hiszen a centralis altereknulla dimenziosak.
Folytonos ideju dinamikai rendszerek eseteben azt lattuk, hogy s(A) = s(B) nemcsakszukseges, hanem elegseges feltetele is ket hiperbolikus rendszer C0-konjugaltsaganak.Vizsgaljuk meg egy egydimenzios es egy ketdimenzios peldan, hogy diszkret ideju esetbenis elegseges-e ez a feltetel.
Pelda 2.2. Tekintsuk az A = 12
es B = −12
szamok (1 × 1-es matrixok) altal megha-tarozott linearis rendszereket. Mindkettonek egydimenzios a stabil altere, azaz s(A) =s(B) = 1, hiszen mindkettonek nullahoz tarto mertani sorozatok adjak a palyait. Azon-ban, amint a 2.3.2. szakasz elejen lattuk, a ket rendszer egymassal nem C0-konjugalt. Ottmegmutattuk, hogy a GL(R) halmazt C0-konjugaltsag szerint hat osztalyra lehet bontani.
Ez a pelda tehat azt mutatja, hogy s(A) = s(B) nem elegseges feltetele a C0-konjugaltsaganak. Ennek ellenere erdemes megvizsgalni a ketdimenzios esetet is, mertebbol intuıciot nyerhetunk a hiperbolikus rendszerek osztalyozasahoz.
Pelda 2.3. Tekintsuk az A = 12I es B = −1
2I matrixokat, ahol I a 2× 2-es egysegmat-
rix. Mindkettonek ketdimenzios a stabil altere, azaz s(A) = s(B) = 2, hiszen mindketto-nek nullahoz tarto sorozatok adjak a palyait. Megmutatjuk, hogy ezek a rendszerek C0-konjugaltak. Olyan h : R2 → R2 homeomorfizmust kell megadni, melyre h(1
2x) = −1
2h(x)
fennall minden x ∈ R2 eseten. A homeomorfizmust ugy adjuk meg, hogy az origo ko-zepu koroket onmagukba vigye, es a sugaruktol fuggo mertekben forgassa el. Induljunkki az egyseg sugaru korbol, es definialjuk ezen h-t onkenyes modon, megpedig ezen korpontjait hagyja helyben a h lekepezes. Ekkor a h(1
2x) = −1
2h(x) egyenlet miatt az 1/2
sugaru koron h hatasa mar meghatarozott, nevezetesen ezt a kort 180-kal kell elforgat-nia. A ket kor kozotti gyuruben ismet onkenyesen lehet definialni a h fuggvenyt. Ezutan
30

az 1/4 es 1/2 sugaru korok kozotti gyuruben a fuggvenyt mar a h(12x) = −1
2h(x) egyen-
let definialja. Ezt kovetoen az 1/4 es 1/2 sugaru korok kozotti gyuruben felvett ertekeka h(1
2x) = −1
2h(x) egyenlet segıtsegevel meghatarozzak h erteket az 1/8 es 1/4 sugaru
korok kozotti gyuruben. Hasonlokeppen az 1/2 es 1 sugaru korok kozotti gyuruben felvettertekek a h(1
2x) = −1
2h(x) egyenlet segıtsegevel meghatarozzak h erteket az 1 es 2 sugaru
korok kozotti gyuruben. Konnyen lathatjuk, hogy a 2k sugaru koron a forgatas szoge−kπ. Legyen tehat az r sugaru koron a forgatas szoge −π log2(r), ezzel a forgatas szogea sugar folytonos fuggvenye lesz, es r = 2k eseten a −kπ szogu forgatast kapjuk. Ezzeltehat a h lekepezest a teljes sıkon definialhatjuk a fenti eljarassal. A fuggvenyt keplettelis meg lehet adni a kovetkezokeppen
h(x) = R(−π log2(|x|))x, ahol R(α) =
(cosα sinα− sinα cosα
)A lekepezes nyilvanvaloan bijekcio, folytonossaga csak az origoban szorul bizonyıtasra,ezt az Olvasora bızzuk.
Megjegyezzuk, hogy 3 dimenzioban az A = 12I es B = −1
2I matrixok, ahol I a
3 × 3-as egysegmatrix, nem C0-konjugaltak. Azt lattuk tehat, hogy s(A) = s(B) nemelegseges feltetele a C0-konjugaltsaganak. Az elegseges feltetelt a kovetkezo lemmabanfogalmazzuk meg.
Lemma 2.19.. Tegyuk fel, hogy s(A) = s(B) = n (vagy u(A) = u(B) = n). Ebben azesetben A es B pontosan akkor C0-konjugaltak, ha sgn detA = sgn detB.
Ennek segıtsegevel megadhato a pontos feltetel hiperbolikus rendszerek C0-konjugalt-sagara.
Tetel 2.20.. Az A,B ∈ HL(Rn) hiperbolikus lekepezesek pontosan akkor C0-konjugal-tak, ha
• s(A) = s(B)
• sgn detA|Es(A) = sgn detB|Es(B)
• sgn detA|Eu(A) = sgn detB|Eu(B)
Pelda 2.4. A tetel szerint az A = 12I es B = −1
2I matrixok, ahol I az n× n-es egyseg-
matrix, pontosan akkor C0-konjugaltak, ha n paros. Ugyanis ekkor a −I matrixnak ispozitıv a determinansa, mıg paratlan n eseten negatıv. Amint tehat fent mar megmutat-tuk az
A =
(12
00 1
2
)es B =
(−1
20
0 −12
)matrixok C0-konjugaltak.
31

Pelda 2.5. A tetel alapjan egyszeruen megmutathato, hogy a hiperbolikus matrixok HL(R2)teret a C0-konjugaltsag nyolc osztalyra bontja. Ennek igazolasat, valamint az egyes osz-talyokbol egy-egy reprezentans megkereseset az Olvasora bızzuk.
2.4. Feladatok
1. Az alabbi L(R2) matrixok kozul melyik C1-konjugalt a
(1 00 −1
)matrixszal?
A =
(12
00 1
2
), B =
(−1
20
0 −12
), C =
(−1
20
0 12
)Valasz: egyik sem.
2. Az alabbi L(R2) matrixok kozul melyik C0-konjugalt a
(1 00 −1
)matrixszal?
A =
(12
00 1
2
), B =
(−1
20
0 −12
), C =
(−1
20
0 12
)Valasz: C.
3. Az alabbi L(R2) matrixok kozul melyik C0-ekvivalens a
(1 00 −1
)matrixszal?
A =
(12
00 1
2
), B =
(−1
20
0 −12
), C =
(−1
20
0 12
)Valasz: C.
4. Az alabbi L(R3) matrixok kozul melyik C0-ekvivalens a
1 0 00 −1 01 1 1
matrixszal?
A =
12
0 00 1
20
1 1 1
, B =
12
0 00 1
20
1 1 −1
, C =
−12
0 00 1
20
1 1 −1
Valasz: B.
5. Az alabbi GL(R2) matrixok kozul melyik C1-konjugalt a
(2 00 −2
)matrixszal?
A =
(12
00 1
2
), B =
(3 00 4
), C =
(−3 00 4
)Valasz: egyik sem.
32

6. Az alabbi GL(R2) matrixok kozul melyik C0-konjugalt a
(2 00 −2
)matrixszal?
A =
(12
00 1
2
), B =
(3 00 4
), C =
(−3 00 4
)Valasz: C.
7. Az alabbi L(R2) matrixok kozul melyik hiperbolikus, azaz melyik van benne azEL(R2) halmazban?
A =
(0 2−1 0
), B =
(1 −12 3
), C =
(3 26 4
)Valasz: B.
8. Az alabbi GL(R2) matrixok kozul melyik hiperbolikus, azaz melyik van benne aHL(R2) halmazban?
A =
(1 −12 3
), B =
(0 1
2
−2 0
), C =
(4 26 5
)Valasz: A.
9. Az alabbi rendszerek kozul melyik orbitalisan ekvivalens az
(1 00 −1
)matrix altal
meghatarozott linearis differencialegyenlettel?
x =
(2 00 −2
)x,
(y1
y2
)=
(y3
1 + y1y22
−y21y2 − y3
2
)Valasz: Az elso.
33

3. fejezet
Lokalis osztalyozas,normalformaelmelet es aHartman–Grobman-tetel
Tekintsuk azx(t) = f(x(t)) (3.1)
n-dimenzios autonom rendszert. Ez altalaban keplettel nem oldhato meg, ıgy a legtobbinformaciot a megoldasokrol a faziskep szolgaltatja. Az x(t) ≡ p konstans megoldasokataz f(p) = 0 algebrai egyenletrendszer megoldasaval nyerhetjuk. Ezen p pontokat nevez-zuk egyensulyi, vagy stacionarius pontoknak. A trajektoriak viselkedese az egyensulyipontok kis kornyezeteben linearizalassal hatarozhato meg. Ez szemleletesen a kovetke-zokeppen magyarazhato. Az y(t) = x(t)− p fuggvenyre a differencialegyenlet
y(t) = x(t) = f(x(t)) = f(p) + f ′(p)y(t) + r(y(t)) = f ′(p)y(t) + r(y(t))
ahol r a maradektagot jeloli. Mivel kis y eseten ez kisebb nagysagrendu, mint a linearistag (ha az nem tul kicsi, pl. nem zerus), azert varhato, hogy a p egyensulyi pont egykornyezeteben a faziskepet az
y(t) = f ′(p)y(t) (3.2)
un. linearizalt egyenlet, melynek matrixat Jacobi-matrixnak nevezzuk, meghatarozza.Itt ket dolgot kell pontosıtani, egyreszt, hogy mi a nem tul kicsi linearis tag, masreszt,hogy milyen ertelemben hatarozza meg a faziskepet.
Erre vonatkozoan a bevezeto Differencialegyenlet kurzusban az egyensulyi pont sta-bilitasat vizsgaltuk. Roviden osszefoglaljuk az ezzel kapcsolatos eredmenyeket. Jeloljea (3.1) rendszer x(0) = p kezdeti feltetelt kielegıto megoldasat t 7→ ϕ(t, p), ennek ertel-mezesi tartomanyat I(p).
34

Definıcio 3.1.. A (3.1) rendszer p ∈ Rn egyensulyi pontjat stabilisnak nevezzuk, haminden ε > 0 szamhoz letezik olyan δ > 0 szam, hogy
q ∈ Rn, |q − p| < δ, t ≥ 0 eseten |ϕ(t, q)− p| < ε.
Az egyensulyi pontot aszimptotikusan stabilisnak nevezzuk, ha stabilis es q fenti valasz-tasa mellett t → +∞ eseten |ϕ(t, q) − p| → 0, lasd 3.1. abra. Az egyensulyi pontotinstabilisnak nevezzuk, ha nem stabilis.
3.1. abra. Aszimptotikusan stabilis egyensulyi pont.
Linearizalas segıtsegevel a stabilitas kovetkezokeppen dontheto el.
Tetel 3.2..
1. Ha az f ′(p) matrix minden sajatertekenek negatıv a valos resze, akkor p aszimpto-tikusan stabilis egyensulyi pontja a (3.1) rendszernek.
2. Ha az f ′(p) matrixnak van pozitıv valosreszu sajaterteke, akkor p instabilis egyen-sulyi pontja a (3.1) rendszernek.
A fenti tetel azon esetekre vonatkozik, amikor a stabil alter n-dimenzios, illetve azinstabil alter legalabb egy dimenzios. Ennel altalanosabb allıtas is megfogalmazhato,mely szerint a stabil, instabil es centralis alterrel azonos dimenzios invarians sokasa-gok leteznek a nemlinearis rendszerben. Ezeket az allıtasokat nevezik stabil, instabil escentralis sokasag tetelnek, melyeket a kovetkezo szakaszban targyalunk. Ebben a sza-kaszban azt vizsgaljuk, hogy egy adott rendszer egy pontjahoz hogyan adhato meg egynala egyszerubb rendszer, melynek faziskepe topologikusan ekvivalens a vizsgalt rend-szer faziskepevel az adott pont egy kornyezeteben. Ennek pontos megfogalmazasahozbevezetjuk a lokalis ekvivalencia fogalmat.
35

Definıcio 3.3.. Legyenek (M,ϕ), (N,ψ) dinamikai rendszerek, p ∈ M , q ∈ N. A ϕdinamikai rendszer a p pontban lokalisan Ck-ekvivalens (konjugalt) a ψ dinamikai rend-szerrel a q pontban, ha van p-nek olyan U kornyezete, es q-nak olyan V kornyezete, esh : U → V Ck-diffeomorfizmus, amely a palyakat egymasba kepezi (az ido megtartasaval),es h(p) = q.
A lokalis vizsgalat alapgondolata az, hogy az f fuggveny p pont koruli f(x) =f(p) + f ′(p) · (x − p) + . . . sorfejtesenek tagjai meghatarozzak a lokalis faziskepet. Je-len szakaszban az ezzel kapcsolatos teteleket targyaljuk, melyeket vazlatosan az alabbimodon foglalhatunk ossze.
• Kiegyenesıtesi tetel: A nem nulla konstans tag meghatarozza a faziskepet.
• Hartman–Grobman-tetel: A hiperbolikus linearis tag meghatarozza a faziskepet.
• Normalformak: A rezonans magasabb foku tagok meghatarozzak a faziskepet.
A Kiegyenesıtesi tetelt itt fogalmazzuk meg, ez tehat a nem egyensulyi pont korulilokalis viselkedesre vonatkozik. A tetel szerint egy nem egyensulyi pontban a rendszerlokalisan Ck-konjugalt azzal a rendszerrel, melynek palyai parhuzamos egyenesek. AHartman–Grobman-tetelt es a normalformakat az alabb kovetkezo ket szakaszban tar-gyaljuk.
Tetel 3.4. (Kiegyenesıtesi tetel). Ha f(p) 6= 0, akkor x = f(x) egyenlet a p pontbanes az y = f(p) egyenlet az origoban lokalisan Ck-konjugaltak (amennyiben f ∈ Ck). Azaz,ha f(p) 6= 0, vagyis p nem egyensulyi pont, akkor a sorfejtes konstans tagja meghatarozzaa faziskepet.
3.1. Hartman–Grobman-tetel
Legyen D ⊂ Rn egy osszefuggo nyılt halmaz, f : D → Rn egy C1 (folytonosan differen-cialhato ) fuggveny, p∗ ∈ D olyan pont melyre f(p∗) = 0. Jelolje az
x(t) = f(x(t)) (3.3)
differencialegyenlet x(0) = p kezdeti feltetelt kielegıto megoldasat x(t) = ϕ(t, p). Hasz-nalni fogjuk a ϕt(p) = ϕ(t, p) jelolest, ezzel ϕt : Rn → Rn. A differencialegyenletnekp∗ egyensulyi pontja. A Hartman–Grobman-tetel lenyege, hogy az egyensulyi pontbana (3.3) rendszer faziskepe lokalisan topologikusan konjugalt a linearizalt rendszer fazis-kepevel. Legyen A = f ′(p∗) a p∗ pontban a Jacobi-matrix, ekkor a linearizalt rendszer
y(t) = Ay(t) (3.4)
36

3.2. abra. Kiegyenesıtesi tetel.
Tetel 3.5. (Hartman-Grobman). Legyenek D, f , p∗ olyanok, mint fent, valamint te-gyuk fel, hogy az A matrix hiperbolikus, azaz semelyik sajaterteke nem nulla valosreszu.Ekkor a (3.3) rendszer a p∗ pontban es a (3.4) rendszer az origoban lokalisan topologiku-san konjugaltak. Azaz letezik a p∗ pontnak olyan U ⊂ Rn kornyezete, az origonak olyanV ⊂ Rn kornyezete es olyan h : U → V homeomorfizmus, melyre
h(ϕ(t, p) = eAth(p) (3.5)
minden p ∈ U es minden olyan t ∈ R eseten, melyre ϕ(t, p) ∈ U . Roviden hϕt = eAth.
A tetel bizonyıtasa a kovetkezo lepesekbol all.
1. Megmutatjuk, hogy felteheto p∗ = 0.
2. Kiterjesztjuk az f fuggvenyt az egesz Rn terre ugy, hogy egy adott gombon kı-vul megegyezzen a sajat linearis reszevel. Megmutatjuk, hogy eleg a kiterjesztettrendszer es a linearizalt rendszer globalis topologikus konjugaltsagat igazolni. Eztnevezik a Hartman–Grobman-tetel globalis valtozatanak.
3. A globalis valtozatot visszavezetjuk a lekepezesekre vonatkozo (globalis) Hartman–Grobman-tetelre.
4. Bebizonyıtjuk a lekepezesekre vonatkozo (globalis) Hartman–Grobman-tetelt.
37

Hasznalni fogjuk az alabbi jeloleseket:
Br = p ∈ Rn : |p| < rC0(Rn,Rn) = g : Rn → Rn : g folytonosC1(Rn,Rn) = g : Rn → Rn : g folytonosan differencialhato C0b (Rn,Rn) = g : Rn → Rn : g folytonos es korlatos
a ∈ C0(Rn,Rn), illetve b ∈ C1(Rn,Rn) eseten
‖a‖0 = supRn
|a| ‖b‖1 = ‖b‖0 + ‖b′‖0
Mielott a bizonyıtas lepeseire raternenk, megfogalmazzuk az Hartman–Grobman-tetelfent emlıtett valtozatait.
Tetel 3.6. (globalis Hartman-Grobman-tetel). Legyen A ∈ L(Rn) hiperbolikus, a ∈C1(Rn,Rn), valamint f = A + a. Jelolje most is a (3.3) rendszer megoldasat ϕ(·, p). Arendszernek az origo az egyensulyi pontja. Ekkor letezik olyan ν > 0 szam, hogy ha az akompakt tartoju es teljesul ra ‖a‖1 < ν, akkor letezik olyan h : Rn → Rn homeomorfiz-mus, melyre
h(ϕ(t, p) = eAth(p) (3.6)
minden p ∈ Rn es minden t ∈ R eseten.
Tetel 3.7. (Hartman–Grobman-tetel lekepezesekre). Legyen L ∈ GL(Rn) hiper-bolikus, azaz L olyan matrix, melynek nincs 0 es 1 abszoluterteku sajaterteke. Ekkorletezik olyan µ > 0 szam, hogy minden olyan F ∈ C1(Rn,Rn) fuggvenyhez, melyre‖F‖1 < µ, letezik egyetlen g ∈ C0
b (Rn,Rn), melyre H = id + g homeomorfizmus, es
H (L+ F ) = L H. (3.7)
3.1.1. A bizonyıtas 1. lepese
Allıtas 3.1. Tegyuk fel, hogy p∗ = 0 eseten igaz a Hartman–Grobman-tetel. Ekkortetszoleges p∗ eseten igaz.
Bizonyıtas. Legyen l : Rn → Rn a kovetkezo eltolas l(p) = p − p∗. Legyen y : R → Rn,y(t) = x(t)− p∗. Ekkor y(t) = x(t) = f(x(t)) = f(y(t) + p∗), azaz y megoldasa az
y(t) = g(y(t)) (3.8)
38

differencialegyenletnek, ahol g = fl−1. Ennek az egyenletnek az origo egyensulyi pontja.Jelolje a differencialegyenlet y(0) = q kezdeti feltetelt kielegıto megoldasat ψ(·, q). Egy-szeruen lathato, hogy ψ(t, q) = ϕ(t, q + p∗)− p∗, azaz
l ϕt = ψt l. (3.9)
Mivel a (3.8) egyenletre a felteves szerint igaz a Hartman–Grobman-tetel, azert van olyanh1 homeomorfizmus, melyre
h1 ψt = eAt h1, (3.10)
ahol A = g′(0) = f ′(p∗). Komponaljuk a (3.10) egyenletet jobbrol l-lel, ekkor h1 ψt l =eAt h1 l. Alkalmazva a (3.9) osszefuggest h1 l ϕt = eAt h1 l. Bevezetve a h = h1 ljelolest a kıvant allıtast kapjuk, mivel h, ket homeomorfizmus kompozıciojakent, magais homeomorfizmus.
3.1.2. A bizonyıtas 2. lepese
Az alabbi kiterjesztesi lemma segıtsegevel bebizonyıtjuk, hogy a Hartman–Grobman-tetel globalis valtozatabol (3.6.. Tetel) kovetkezik a lokalis (3.5.. Tetel). A lemmat nembizonyıtjuk.
Lemma 3.8.. Legyen f ∈ C1(BR,Rn), es legyen A = f ′(0). Minden ν > 0 szamhozletezik olyan r > 0 es a ∈ C1(Rn,Rn), melyekre
1. minden |p| < r eseten a(p) = f(p)− Ap,
2. minden |p| > 2r eseten a(p) = 0,
3. ‖a‖1 < ν.
3.5. Tetel bizonyıtasa. A 3.1. Allıtas szerint elegendo a tetelt p∗ = 0 eseten igazolni.Legyen ν > 0 a 3.6.. Tetelben adott ertek (ez csak az A matrixtol fugg). Ehhez a kiter-jesztesi lemma szerint valasszuk meg az r > 0 szamot es az a ∈ C1(Rn,Rn) fuggvenyt.Legyen f = A + a, es jelolje az x(t) = f(x(t)) differencialegyenlet megoldasat ϕ(·, p).Ekkor a Br gombon az f es f fuggvenyek megegyeznek, ıgy p ∈ Br es ϕ(t, p) ∈ Br esetenϕ(t, p) = ϕ(t, p). Mivel az a fuggvenyre teljesulnek a 3.6.. Tetel feltetelei, azert e tetelszerint letezik olyan h : Rn → Rn homeomorfizmus, melyre h ϕt = eAt h. EkkorU = Br, h = h|U es V = h(Br) valasztassal teljesul a bizonyıtando allıtas.
39

3.1.3. A bizonyıtas 3. lepese
Ebben a szakaszban megmutatjuk, hogy a lekepezesekre vonatkozo Hartman–Grobman-tetelbol (3.7.. Tetel) kovetkezik a globalis Hartman–Grobman-tetel (3.6.. Tetel).
3.6. Tetel bizonyıtasa. A konstans variacios formula szerint az x(t) = Ax(t) + a(x(t))differencialegyenlet x(0) = p kezdeti feltetelt kielegıto megoldasara fennall
ϕ(t, p) = eAtp+
t∫0
eA(t−s)a(ϕ(s, p))ds .
Ezt a t = 1 esetre alkalmazva
ϕ(1, p) = eAp+
1∫0
eA(1−s)a(ϕ(s, p))ds . (3.11)
Legyen
L = eA es F (p) =
1∫0
eA(1−s)a(ϕ(s, p))ds .
Valasszuk meg a µ > 0 szamot az L matrixhoz a 3.7. Tetel szerint. Egyszeruen megmu-tathato, hogy van olyan ν > 0 szam, melyre ‖a‖1 < ν eseten ‖F‖1 < µ.
Mivel az A matrix sajatertekei nem nulla valosreszuek, azert az L matrix sajatertekeinem egy abszolutertekuek. Igy teljesulnek a 3.7. Tetel feltetelei, tehat letezik egyetlenolyan g ∈ C0
b (Rn,Rn), melyre fennall
(id + g) (L+ F ) = L (id + g) . (3.12)
Megmutatjuk, hogy a h = id+g valasztassal teljesul a bizonyıtando allıtas, azaz hϕt =eAt h. Ehhez elegendo megmutatni, hogy az
α(p) = e−Ath(ϕ(t, p))
keplettel definialt fuggveny megegyezik a h fuggvennyel. Ez viszont fennall, ha megmu-tatjuk, hogy az α− id fuggveny is teljesıti (3.12)-t, es igaz α− id ∈ C0
b (Rn,Rn), ugyanisa g fuggveny egyertelmu volt. Ezt a ket allıtast fogjuk most igazolni.
A (3.12) egyenlet szerinth(ϕ(1, p)) = eAh(p)
minden p ∈ Rn eseten. Igy
[α (L+ F )](p) = α(ϕ(1, p)) = e−Ath(ϕ(t, ϕ(1, p))) = e−Ath(ϕ(t+ 1, p)) =
e−Ath(ϕ(1, ϕ(t, p))) = e−AteAh(ϕ(t, p)) = eAe−Ath(ϕ(t, p)) = (L α)(p),
40

tehat az α− id fuggveny is teljesıti (3.12)-t. Masreszt
(α− id)(p) = e−Ath(ϕ(t, p))− p = e−At(h(ϕ(t, p))− ϕ(t, p)) + e−Atϕ(t, p)− p .
A jobboldal elso tagja azert korlatos (p-ben), mert h− id korlatos Rn-en, a masodik tagpedig azert korlatos, mert nagy |p| eseten a(p) = 0, ıgy az egyenlet linearis, tehat ϕ(t, p) =eAtp. Ezzel tehat belattuk, hogy α− id ∈ C0
b (Rn,Rn), amibol a tetel kovetkezik.
3.1.4. A bizonyıtas 4. lepese
3.7. Tetel bizonyıtasa. A bizonyıtast ot lepesben vegezzuk el.1. Legyen az L matrix valos Jordan normalformajat eloallıto bazis e1, e2, . . . en, az
ezekhez tartozo sajatertekek legyenek λ1, λ2, . . . λn. Legyenek
Es = spanek : |λk| < 1, Eu = spanek : |λk| > 1
az L matrixhoz tartozo stabil es instabil alterek. Ezek nyilvan invariansak L-re (azazL(Es) ⊂ Es es L(Eu) ⊂ Eu), valamint Es
⊕Eu = Rn. Legyenek
Ls = L|Es , Lu = L|Eu .
Megmutathato (most ennek igazolasat mellozzuk), hogy az e1, e2, . . . en bazis megfelelovalasztasaval fennall ‖Ls‖ < 1 es ‖L−1
u ‖ < 1. Legyen
r = max‖Ls‖, ‖L−1u ‖ < 1 .
2. Ebben a pontban megmutatjuk, hogy letezik olyan µ > 0 szam, melyre ‖F‖1 < µeseten az L + F fuggveny invertalhato. A globalis inverzfuggveny tetel alabbi alakjatalkalmazzuk.Globalis inverzfuggveny tetel Legyen φ ∈ C1(Rn,Rn), melyre minden p ∈ Rn eseten
letezik φ′(p)−1, es letezik olyan K > 0, hogy ‖φ′(p)−1‖ ≤ K. Ekkor φ homeomorfizmus.Legyen most φ = L+F , ekkor φ′ = L+F ′. Ezert van olyan µ > 0, melyre ‖F‖1 < µ
eseten teljesulnek a globalis inverzfuggveny tetel feltetelei (ezeket itt reszletesen nemellenorizzuk), ıgy L+ F homeomorfizmus.3. Most a (3.7) egyenletet olyan alakra hozzuk, hogy g meghatarozasara a Banach-fele
fixponttetel alkalmazhato legyen.Egyszeruen lathato, hogy a (3.7) egyenlet ekvivalens az alabbival
F + g (L+ F ) = L g . (3.13)
Komponaljuk ezt az egyenletet eloszor jobbrol az (L+F )−1 fuggvennyel, majd balrol azL−1 fuggvennyel. Ekkor a kovetkezo egyenleteket kapjuk
g = −F (L+ F )−1 + L g (L+ F )−1 , (3.14)
41

L−1 F + L−1 g (L+ F ) = g , (3.15)
Mivel Es⊕
Eu = Rn, azert mind az F , mind a g fuggveny eseteben bevezethetjuk azFs, gs : Rn → Es, es az Fu, gu : Rn → Eu fuggvenyeket olyan modon, hogy fennalljon
g = gs + gu es F = Fs + Fu .
Nyilvanvaloan g ∈ C0b (Rn,Rn) eseten igaz gs, gu ∈ C0
b (Rn,Rn) is. Definialjuk a T opera-tort g ∈ C0
b (Rn,Rn) eseten a kovetkezokeppen.
T (g) = L gs (L+ F )−1 − Fs (L+ F )−1 + L−1 gu (L+ F ) + L−1 Fu . (3.16)
Megmutatjuk, hogy ha g fixpontja a T operatornak, akkor H = id + g megoldasa a (3.7)egyenletnek. Ugyanis tetszoleges p ∈ Rn eseten
(Lgs(L+F )−1−Fs(L+F )−1)(p) ∈ Es es (L−1gu(L+F )+L−1Fu)(p) ∈ Eu .
Igy g = gs + gu miatt a T (g) = g egyenlet csak ugy allhat fenn, ha az alabbi ket egyenletteljesul
L gs (L+ F )−1 − Fs (L+ F )−1 = gs es L−1 gu (L+ F ) + L−1 Fu = gu .
EzekbolL gs = gs (L+ F ) + Fs es L gu = gu (L+ F ) + Fu .
Osszeadva a ket egyenletet es felhasznalva L linearitasat, a (3.13) egyenletet kapjuk,amely ekvivalens a (3.7) egyenlettel.4. Ebben a pontban megmutatjuk, hogy megfelelo normat valasztva a C0
b (Rn,Rn)teren a T operator a teret onmagaba kepezo kontrakcio, ıgy a g fuggveny letezese esegyertelmusege a Banach-fele fixponttetelbol kovetkezik.
Nyilvanvalo, hogy T ertelmezve van az egesz C0b (Rn,Rn) teren, es barmely g ∈
C0b (Rn,Rn) eseten a T (g) fuggveny az egesz Rn halmazon ertelmezett folytonos fugg-
veny. Eloszor megmutatjuk, hogy T (g) korlatos is, azaz a T operator a C0b (Rn,Rn) teret
onmagaba kepezi. Ugyanis a (3.16) jobboldalan allo minden tag egy korlatos fuggvenytdefinial. Peldaul az utolso tag eseteben
|(L−1 Fu)(p)| = |L−1Fu(p)| ≤ ‖L−1‖‖F‖0
fennall minden p ∈ Rn pontra. Hasonloan a tobbi tagra is.Vegul belatjuk, hogy T kontrakcio. Legyen g ∈ C0
b (Rn,Rn) eseten
‖g‖∗ = ‖gs‖0 + ‖gu‖0 .
Konnyen igazolhato, hogy a C0b (Rn,Rn) ter ezzel a normaval Banach ter. Megmutatjuk,
hogy ekkor T kontrakcio. Ehhez felhasznaljuk, hogy
(T (g))s = L gs (L+ F )−1 − Fs (L+ F )−1 ,
(T (g))u = L−1 gu (L+ F ) + L−1 Fu ,
42

valamint, hogy g, g ∈ C0b (Rn,Rn) eseten (g + g)s = gs + gs, es (g + g)u = gu + gu.
Tetszoleges g, g ∈ C0b (Rn,Rn) eseten
‖T (g)− T (g)‖∗ = ‖(T (g)− T (g))s‖0 + ‖(T (g)− T (g))u‖0 =
‖L gs (L+F )−1−L gs (L+F )−1‖0 +‖L−1 gu (L+F )−L−1 gu (L+F )‖0 =
supp∈Rn
|Lsgs((L+ F )−1(p))− Lsgs((L+ F )−1(p))|+
supp∈Rn
|L−1u gu((L+ F )(p))− L−1
u gu((L+ F )(p))| ≤
‖Ls‖‖gs − gs‖0 + ‖L−1u ‖‖gu − gu‖0 ≤ r(‖(g − g)s‖0 + ‖(g − g)u‖0) ≤ r(‖g − g‖∗ .
Tehat r < 1 miatt T kontrakcio, ıgy letezik egyetlen g ∈ C0b (Rn,Rn) fixpontja.
5. Ebben a pontban megmutatjuk, hogy a H = id+g fuggveny homeomorfizmus. Ehhezazt hasznaljuk fel, hogy a H fuggveny inverzere a (3.7) egyenlethez hasonlo egyenletırhato fel, melynek szinten egyertelmu a megoldasa. Ugyanis a 3. es 4. pontbelihezhasonloan igazolhato, hogy letezik egyetlen olyan g∗ ∈ C0
b (Rn,Rn) fuggveny, melyre
(L+ F ) (id + g∗) = (id + g∗) L . (3.17)
Masreszt a (3.7) egyenletet az F ≡ 0 esetre alkalmazva azt kapjuk, hogy az
L (id + g) = (id + g) L . (3.18)
egyenletnek csak a g ≡ 0 fuggveny a megoldasa.Megmutatjuk, hogy ha g ∈ C0
b (Rn,Rn) a (3.7) egyenlet megoldasa, akkor a H = id+gfuggveny inverze a H∗ = id + g∗ fuggveny. Az (3.7) es (3.17) egyenletbol
L H H∗ = H (L+ F ) H∗ = H H∗ L .
Legyen g = H H∗ − id. Ezzel tehat g a (3.18) egyenlet megoldasa. Ha megmutatjuk,hogy g ∈ C0
b (Rn,Rn), akkor g ≡ 0, azaz id = H H∗. Ez pedig kovetkezik az alabbibol:
g = H H∗ − id = (id + g) (id + g∗)− id = g∗ + g (id + g∗) ,
mivel a jobboldalon allo fuggveny nyilvan folytonos es korlatos. Hasonloan igazolhato,hogy id = H∗ H, ıgy H folytonos bijekcio, amibol kovetkezik, hogy homeomorfizmus.
Az alabbi peldakkal azt mutatjuk meg, hogy, ha a linearis resz nem hiperbolikus,akkor elofordulhat, hogy a linearizalt rendszer lokalis faziskepe kulonbozik a nemlinearisrendszer lokalis faziskepetol.
43

Pelda 3.1. Tekintsuk az alabbi ketvaltozos rendszert.
x = −y − xy2 − x3 (3.19)
y = x− y3 − x2y (3.20)
Ennek linearis resze az origoban, mint egyensulyi pontban az A =
(0 −11 0
)matrix,
amely centrum pontot hataroz meg, azaz a linearis resz nem hiperbolikus. Az origo eb-ben a rendszerben stabilis fokusz, amit polarkoordinatakra valo transzformalassal egy-szeruen igazolhatunk. Vezessuk be az r es φ fuggvenyeket az x(t) = r(t) cos(φ(t)),y(t) = r(t) sin(φ(t)) transzformacios kepletekkel. Ezekbol
x = r cos(φ)− rφ sin(φ), y = r sin(φ) + rφ cos(φ).
Az elso egyenletet cos(φ)-vel, a masodikat sin(φ)-vel szorozva, majd a ket egyenletet ossze-adva es felhasznalva a differencialegyenleteket, az r = −r3 differencialegyenletet kapjuk.Hasonlokeppen az elso egyenletet sin(φ)-vel, a masodikat cos(φ)-vel szorozva, majd a ketegyenletet kivonva es felhasznalva a differencialegyenleteket, a φ = 1 egyenlethez jutunk.Igy az r fuggveny szigoruan monoton fogyo modon nullahoz, a φ fuggveny pedig szigoruannovekedoen vegtelenhez tart, ezert az origo stabil fokusz, amint a 3.1.4. abran lathato.
A (3.19)-(3.20) rendszer faziskepe.
Pelda 3.2. Tekintsuk az alabbi ketvaltozos rendszert.
x = −y + xy2 + x3 (3.21)
y = x+ y3 + x2y (3.22)
44

Ennek linearis resze az origoban, mint egyensulyi pontban az A =
(0 −11 0
)matrix,
amely centrum pontot hataroz meg, azaz a linearis resz nem hiperbolikus. Az origo ebbena rendszerben instabil fokusz, amit polarkoordinatakra valo transzformalassal egyszeruenigazolhatunk. Vezessuk be ismet az r es φ fuggvenyeket az x(t) = r(t) cos(φ(t)), y(t) =r(t) sin(φ(t)) transzformacios kepletekkel. Ezekbol
x = r cos(φ)− rφ sin(φ), y = r sin(φ) + rφ cos(φ).
Az elso egyenletet cos(φ)-vel, a masodikat sin(φ)-vel szorozva, majd a ket egyenletet ossze-adva es felhasznalva a differencialegyenleteket r = r3. Hasonlokeppen az elso egyenletetsin(φ)-vel, a masodikat cos(φ)-vel szorozva, majd a ket egyenletet kivonva es felhasznalvaa differencialegyenleteket φ = 1. Igy az r es φ fuggveny is szigoruan monoton novekedoenvegtelenhez tart, ezert az origo instabil fokusz, amint a 3.1.4. abran lathato.
A (3.21)-(3.22) rendszer faziskepe.
3.2. Normalformak
Legyen f : Rn → Rn k-szor folytonosan differencialhato fuggveny, melyet roviden f ∈ Ck
fog jelolni. Sokszor feltesszuk, hogy f akarhanyszor differencialhato, ezt f ∈ C∞ fogjajelolni, ha pedig f analitikus is, azaz sorba fejtheto, tehat sorfejtesenek van osszege, esaz eloallıtja f -et, akkor az f ∈ Cω jelolest hasznaljuk.
A normalformak levezetesenek alapgondolata a kovetkezo. Az x(t) = f(x(t)) diffe-rencialegyenlet egyszerusıtese celjabol vezessuk be az y(t) fuggvenyt az x = h(y) ossze-fuggessel, ahol h diffeomorfizmus. Ekkor az y fuggvenyre a differencialegyenlet az alabbi
45

modon kaphato meg. Az x(t) = h(y(t)) osszefuggest derivalva x = h′(y) · y, masresztx = f(x) = f
(h(y)
)miatt h′(y) · y = f
(h(y)
), azaz az y fuggvenyre az y(t) = g(y(t))
differencialegyenletet kapjuk, ahol az f es g kozott fennall
h′ · g = f h. (3.23)
Ez tehat a 2.5. Allıtas szerint azt jelenti, hogy az x(t) = f(x(t)) es y(t) = g(y(t))dinamikai rendszerek Ck-konjugaltak, amennyiben h ∈ Ck. A cel olyan h fuggveny va-lasztasa, hogy a g sorfejteseben minel kevesebb tag legyen (ekkor varhatoan egyszerubbmeghatarozni az y-ra vonatkozo faziskepet). A h transzformacio segıtsegevel tehat lenye-geben eltuntetjuk a jobboldal sorfejtesenek azon tagjait, amelyek nem jatszanak szerepeta faziskep meghatarozasaban.
A lokalis faziskepet egy p egyensulyi pont korul fogjuk vizsgalni. Elokeszıto lepeskenttoljuk el az egyensulyi pontot az origoba, es hozzuk a linearis reszt Jordan-normalalakra.Azaz vezessuk be az y = x − p uj fuggvenyt, erre a differencialegyenlet y = g(y), aholg(y) = f(y + p). A linearis resz Jordan-normalalakra hozasahoz legyen P ∈ Rn×n inver-talhato matrix, es vezessuk be az uj y fuggvenyt az x = Py linearis transzformacioval.Ekkor P y = f
(P (y)
), azaz y = g(y), ahol g(y) = P−1 · f(Py). Ekkor az y = g(y)
rendszer origobeli Jacobi-matrixa g′(0) = P−1 · f ′(0) · P az eredeti f ′(0) Jacobi-matrixJordan-normalalakjanak valaszthato, ha a P matrixot alkalmasan valasztjuk. A tovab-biakban tehat feltesszuk, hogy az x(t) = f(x(t)) rendszer egyensulyi pontja az origo, esa linearizalassal kapott f ′(0) Jacobi-matrix Jordan-normalalaku.
A tovabbiakban celunk a magasabb foku tagok kitranszformalasa, melyet eloszor azegydimenzios esetben mutatunk be. Legyen tehat f(x) = Ax+ar ·xr + o(xr), ahol r ≥ 2es o(xr) egy olyan fuggvenyt jelol, amely csak r-nel magasabb foku tagokat tartalmaz,azaz xr-nel osztva nullahoz tart, amint x→ 0. Keressuk a h fuggvenyt h(x) = x+hr ·xrpolinom alakban. Nezzuk meg, hogy a (3.23) osszefugges alapjan elerheto-e, hogy a gfuggveny g(x) = Ax+o(xr) alaku legyen. Mivel h′(x) = 1+r ·hr ·xr−1, azert feltetelezve,hogy g(x) = Ax+ o(xr), a (3.23) bal oldala
h′(x)g(x) = Ax+ Arhrxr + o(xr),
masreszt a (3.23) jobb oldala
f(h(x)
)= Ax+ Ahrx
r + arxr + o(xr).
Igy a ket oldalon szereplo r-ed foku tagok egyutthatoit egyenlove teve az Arhr = Ahr+arosszefuggest kapjuk, melybol a h fuggveny ismeretlen hr egyutthatoja meghatarozhato,ha A 6= 0
hr =ar
A(r − 1).
Ezzel azt kaptuk, hogy az egydimenzios esetben, ha a linearis resz nem nulla, akkorminden magasabb foku tag kitranszformalhato. Pontosabban megfogalmazva a tagok
46

eltuntetese a kovetkezokeppen tortenik. Eloszor egy H2(x) = x + h2 · x2 fuggvenytvalasztunk, melyben h2 = a2/A. Ekkor a G2 fuggveny G2(x) = Ax + o(x2) alaku esteljesıti a (3.23) egyenletet, azaz H ′2 ·G2 = f H2. Ezutan a G2(x) = Ax+ b3x
3 + o(x3)fuggvenyhez keresunk egy H3(x) = x + h3 · x3 fuggvenyt. Ebben h3 = b3/2A, ekkorG3(x) = Ax+ o(x3) alaku es teljesıti a (3.23) egyenletet, azaz H ′3 ·G3 = G2 H3. Legyenmost h = H2 H3, ekkor h′ = (H ′2 H3) ·H ′3, ıgy
f h = f H2 H3 = (H ′2 ·G2) H3 = (H ′2 H3) · (G2 H3)) =
(H ′2 H3) ·H ′3 ·G3 = h′ ·G3.
Tehat f h = h′ · G3, ami azt jelenti, hogy a H2 es H3 lekepezesek egymas utanialkalmazasaval kapott h transzformacio mind a masodfoku es a harmadfoku tagokatkitranszformalja az f sorfejtesebol. Az eljarast folytatva, ha a Gk−1 fuggvenyt, melybencsak k−1-ed es magasabb foku tagok vannak, mar meghataroztuk, akkor a Hk fuggvenyhk egyutthatojanak megfelelo valasztasaval elerheto, hogy a
H ′k ·Gk = Gk−1 Hk
egyenlet altal meghatarozott Gk fuggveny sorfejteseben ne legyenek k-nal kisebb fokutagok. Igy vegul a h = H2H3. . . vegtelen kompozıcio segıtsegevel az osszes nemlinearistag kitranszformalhato, azaz fennall a (3.23) egyenlet a g(x) = Ax linearis fuggvennyel.Itt termeszetesen kerdes a vegtelen kompozıcio konvergenciaja, melyrol a szakasz vegenmegfogalmazunk egy tetelt. A tovabbiakban a fenti eljarast kiterjesztjuk az n-dimenziosesetre.
Tekintsuk tehat az x(t) = f(x(t)) rendszert, melynek egyensulyi pontja az origo, esa linearizalassal kapott A = f ′(0) Jacobi-matrixrol tegyuk fel, hogy diagonalis. Legyentehat
f(x) = Ax+ a(x) + o(xr),
ahol
A =
λ1 0. . .
0 λn
diagonalis es a(x) csak r-ed foku tagokat tartalmaz, azaz a(x)
ei · xm11 · xm2
2 · · · · · xmnn , m1 +m2 + · · ·+mn = r
alaku tagok linearis kombinacioja, ahol ei ∈ Rn az i-edik egysegvektor (i-edik koordi-nataja 1, a tobbi koordinataja 0). Peldaul n = 2, r = 2 eseten a(x) az alabbi ternekeleme:
V2 = span
(x2
1
0
),
(x1x2
0
),
(x2
2
0
),
(0
x21
),
(0
x1x2
),
(0
x22
).
47

Tehat az x(t) = f(x(t)) rendszer az alabbi alakba ırhato
x1 = λ1x1 + a20x21 + a11x1x2 + a02x
22 + o(x3)
x2 = λ2x2 + b20x21 + b11x1x2 + b02x
22 + o(x3)
Tetszoleges n es r eseten a(x) a hasonloan definialt
Vr = spanei · xm11 · xm2
2 · · · · · xmnn : m1 +m2 + · · ·+mn = r, i = 1, 2, . . . , n
ternek eleme. Keressuk a h homeomorfizmust h(x) = x+H(x) alakban, ahol H(x) ∈ Vris r-ed foku tagok linearis kombinacioja. Celunk a H olyan valasztasa, hogy a (3.23)egyenlet altal meghatarozott g fuggvenyre g(x) = Ax+o(xr) teljesuljon. Irjuk fel a (3.23)egyenlet bal es jobb oldalat.
(f h)(x) = Ax+ AH(x) + a(x+H(x)) + o(xr) = Ax+ AH(x) + a(x) + o(xr)
mivel a(x+H(x)) = a(x) + o(xr), az a sorfejtesenek felhasznalasaval. Masreszt
h′(x) · g(x) = (I +H ′(x)) · (Ax+ o(xr)) = Ax+H ′(x) · Ax+ o(xr).
A jobb es bal oldal r-ed foku tagjainak egyutthatoit egyenlove teve kapjuk aH fuggvenyrevonatkozo, ugynevezett homologikus egyenletet
H ′(x)Ax− AH(x) = a(x).
Vezessuk be az LA : Vr → Vr linearis lekepezest, amely egy H fuggvenyhez a homologikusegyenlet bal oldalat rendeli hozza, azaz
(LAH)(x) = H ′(x)Ax− AH(x).
A homologikus egyenletnek tehat pontosan akkor van minden a ∈ Vr eseten egyertelmumegoldasa, ha LA bijekcio, azaz fennall a kovetkezo allıtas.
Allıtas 3.2. Ha 0 nem sajaterteke az LA lekepezesnek, akkor az r-ed foku tagok kitransz-formalhatok.
Nezzuk meg, hogy hogyan hat az LA lekepezes a Vr fenti megadasaban szereplo bazisele-mekre. Ehhez vezessuk be az xm = xm1
1 · xm22 · · · · · xmn
n jelolest.
Lemma 3.9..
LA(eixm) = eix
m
( n∑k=1
mkλk − λi),
ahol az mk szamok az m koordinatai, λ1, λ2, . . . , λn az A matrix diagonalisaban allosajatertekek.
48

Bizonyıtas. Most tehat
H(x) = eixm =
0...0
xm11 xm2
2 . . . xmnn
0...0
,
ıgy
AH(x) = eixm =
0...0
λixm11 xm2
2 . . . xmnn
0...0
= λieix
m.
Masreszt
H ′(x) =
0...0
m1xm
x1m2
xm
x2. . . mn
xm
xn
0...0
es
Ax =
λ1x1
λ2x2...
λnxn
,
melyekbol
H ′(x)Ax =
0...0
xm∑n
k=1 mkλk0...0
= eix
m
n∑k=1
mkλk.
49

A fentiekbol
H ′(x)Ax− AH(x) = eixm
( n∑k=1
mkλk − λi),
amit bizonyıtani akartunk.
A lemma szerint tehat az LA lekepezes sajatertekei a∑n
k=1mkλk−λi szamok, a sajat-vektorai pedig az eix
m alaku fuggvenyek. Mivel ezek a fuggvenyek feszıtik ki a Vr teret,azert pontosan annyi sajaterteket talaltunk meg, amennyi a Vr ter dimenzioja. Igy azosszes sajatertek
∑nk=1mkλk−λi alakban eloallıthato, ami azt jelenti, hogy amennyiben
ezek nem nullak, akkor az LA lekepezes bijekcio. Vezessuk be ezen sajatertekek alapjana kovetkezo fogalmat.
Definıcio 3.10.. Az A matrix sajatertekeit rezonansaknak nevezzuk, ha van olyan i ∈1, 2, . . . , n, es vannak olyan m1,m2, . . . ,mn nem negatıv egeszek, melyekre m1 +m2 +. . .+mn ≥ 2 es λi =
∑nk=1 mkλk. Amennyiben ez fennall, akkor az eix
m tagot rezonanstagnak hıvjak.
Ha tehat az A matrix sajatertekeit nem rezonansak, akkor az LA lekepezes bijekcio. Ezpedig azt jelenti, hogy megadhato diffeomorfizmusok olyan sorozata, melyek kompozı-ciojaval az eredeti rendszer a sajat linearis reszevel Ck-konjugalt, sot C∞-konjugalt. Avegtelen kompozıcio konvergenciaja megfelelo feltetelek mellett igazolhato, ezt fogalmaz-zuk meg az alabbi tetelben.
Tetel 3.11. (Poincare tetele). 1. Ha A sajatertekei nem rezonansak, akkor az x =f(x) egyenletbol minden tag kitranszformalhato, azaz formalisan megadhato olyantranszformacio, mellyel a rendszer ekvivalens az y = Ay linearis rendszerrel, aholA = f ′(0).
2. Ha A sajatertekei nem rezonansak es a sajatertekek halmazanak konvex burka nemtartalmazza 0-t C-ben, akkor x = f(x) es y = Ay az origoban lokalisan C∞-konjugalt.
Pelda 3.3. Ha a rendszer n = 2 dimenzios, akkor masodfoku rezonans tagok a kovetke-zokeppen fordulhatnak elo.
m = (0, 2), 0 · λ1 + 2 · λ2 = λ1 v. λ2
m = (1, 1), 1 · λ1 + 1 · λ2 = λ1 v. λ2
m = (2, 0), 2 · λ1 + 0 · λ2 = λ1 v. λ2
Ha peldaul λ1 = 0 vagy λ2 = 0, akkor az m = (1, 1) valasztassal rezonanciat kapunk,azaz az x1x2 tagot nem lehet kitranszformalni.
50

3.3. Feladatok
1. Ha a rendszer n = 2 dimenzios, es az A matrix sajatertekei ±i, akkor az alabbitagok kozul melyek rezonansak?
(A) x1x2, (B) x21, (C) x1x
22
Valasz: (C).
2. Ha a rendszer n = 2 dimenzios, es az A matrix sajatertekei ±1, akkor az alabbitagok kozul melyek rezonansak?
(A) x1x2, (B) x21, (C) x1x
22
Valasz: (C).
51

4. fejezet
Stabil, instabil es centralis sokasagtetel
Linearis rendszerek eseteben bevezettuk a stabil, instabil es centralis altereket a 2.8..Definıcioban. Ezen alterek invariansak, azaz a trajektoriak nem hagyjak el azokat. Ebbena szakaszban megmutatjuk, hogy nemlinearis rendszerek eseteben ezen alterek szerepet astabil, instabil es centralis sokasag veszi at. A stabil es instabil sokasag tetel bizonyıtasatechnikailag egyszerubb, az elso szakaszban ezekkel fogunk foglakozni, a centralis sokasagtetelt kulon szakaszban targyaljuk.
4.1. Stabil es instabil sokasag tetel
A tetel szemleletes megertesehez eloszor vizsgaljuk meg az alabbi ket egyszeru rendszert.
Pelda 4.1. Tekintsuk a nyeregpontot meghatarozo
x1 = −x1
x2 = x2
linearis rendszert. Ebben a stabil alter, Es, a vızszintes koordinata tengely, az instabilalter, Eu, pedig a fuggoleges tengely, amint a 4.1. abran lathatjuk. Vegyuk eszre, hogyaz Es es Eu altereken kıvul nincs mas olyan egydimenzios alter, azaz origon athaladoegyenes, amelyet a palyak nem hagynak el, azaz invarians lenne.
A stabil es instabil alterek a 4.1 peldaban.Az alabbi pelda azt mutatja, hogy a fenti linearis rendszer kis nemlinearis perturba-
cioja hogyan valtoztatja meg az invarians altereket.
52

Pelda 4.2. Tekintsuk az
x1 = −x1
x2 = x2 + x21
nemlinearis rendszert. Az elso egyenlet fuggetlen a masodiktol, megoldasa x1(t) = e−tc1.Ezt behelyettesıtve a masodik egyenletbe, inhomogen linearis egyenletet kapunk, melyet
meg lehet oldani: x2(t) = et ·c2 +c213
(et−e−2t). Ezek a megoldasok teljesıtik az x1(0) = c1,
x2(0) = c2 kezdeti feltetelt. Vegyuk eszre, hogy amennyiben a kezdeti feltetelre c2 +c213
= 0
fennall, akkor minden t idopontban igaz x2(t) +x21(t)
3= 0. Azaz a
Ws = (c1, c2) ∈ R2 : c2 +c2
1
3= 0
halmaz invarians, a palyak nem hagyjak el. Az ezen halmazbol indulo trajektoriak azorigohoz tartanak, ezt fogjuk stabil sokasagnak hıvni, hiszen ez vette at a stabil alterszerepet. Az instabil sokasagot egyszerubb meghatarozni, hiszen a fuggoleges koordinata-tengely invarians, es ezen a trajektoriak vegtelenhez tartanak, tehat az invarians sokasagez esetben a Wu = (0, c2) ∈ R2 : c2 ∈ R alter. Az invarians sokasagokat a 4.1. abramutatja.
A stabil es instabil sokasagok a 4.2 peldaban.
4.1.1. Altalanos eset
A fenti motivalo peldak utan terjunk ra most az altalanos eset targyalasara. A soka-sag fogalmanak technikai reszleteit szeretnenk elkerulni, ezert a sokasagokat fuggveny
53

grafikonnal fogjuk helyettesıteni. Megjegyezzuk, hogy a sokasag a gorbe es a felulet fo-galmat altalanosıtja, ıgy az absztrakt fogalom helyett gondolhatunk ezekre, az erdeklodoOlvasonak ajanljuk Perko konyvenek [19] 2.7. fejezetet.
Legyen f : Rn → Rn folytonosan differencialhato fuggveny, melyre f(0) = 0. Azx = f(x) differencialegyenlet-rendszernek tehat az origo egyensulyi pontja, egy p pont-bol indulo megoldast szokott modon jeloljon ϕ(t, p). Tegyuk fel, hogy az f ′(0) Jacobi-matrixnak nincs nulla valosreszu sajaterteke, az Es es Eu stabil es instabil alterei pedigk, illetve n− k dimenziosak.
Tetel 4.1. (Stabil es instabil sokasag tetel). Megadhato az origonak egy U kornye-zete, valamint vannak olyan Ψ : Es ∩ U → Eu es Φ : Eu ∩ U → Es folytonosan differen-cialhato fuggvenyek, melyekkel a
W locs = (q,Ψ(q)) ∈ Rn : q ∈ Es ∩ U es W loc
u = (r,Φ(r)) ∈ Rn : r ∈ Eu ∩ U
k-dimenzios lokalis stabil sokasag es n−k dimenzios lokalis instabil sokasag rendelkezik azalabbi tulajdonsagokkal. (Megjegyezzuk, hogy a fenti q es Φ(r) vektornak k koordinataja,az r es Ψ(q) vektornak pedig n− k koordinataja van.)
1. W locs pozitıvan invarians, W loc
u negatıvan invarians.
2. Az origoban W locs erinti az Es alteret, W loc
u pedig az Eu alteret.
3. Ha p ∈ W locs , akkor lim
t→∞ϕ(t, p) = 0.
4. Ha p ∈ W locu , akkor lim
t→−∞ϕ(t, p) = 0.
54

Bizonyıtas. Elegendo a stabil sokasagra vonatkozo allıtasokat igazolni, ugyanis az x =−f(x) egyenlet stabil sokasaga megegyezik az x = f(x) egyenlet instabil sokasagaval. Atetel stabil sokasagra vonatkozo reszet harom lepesben bizonyıtjuk.1. Lepes
Eloszor a linearis reszt Jordan-normalalakra transzformaljuk. Az f ′(0) matrix Jordan-normalalakja:
J =
(B 00 C
),
ahol B ∈ Rk×k minden sajaterteke negatıv valosreszu, es C ∈ Rn−k×n−k minden sajat-erteke pozitıv valosreszu. Jelolje P azt a matrixot, amely az f ′(0) matrixot Jordan-normalalakra hozza, azaz Pf ′(0)P−1 = J . Vezessuk be az x = Px uj valtozot. Ekkor
˙x = Px = Pf(x) = Pf ′(0)x+ P(f(x)− f ′(0)x
)=
= Pf ′(0)P−1x+ P(f(P−1x)− f ′(0)P−1x
)azaz
˙x = Jx+ a(x), (4.1)
ahol a(0) = 0 ∈ Rn es a′(0) = 0 ∈ Rn×n. A tovabbiakban tekintsuk az x fuggvenyrevonatkozo egyenletet. Erre az egyenletre vonatkozoan
Es = p ∈ Rn : pk+1 = pk+2 = . . . pn = 0, Eu = p ∈ Rn : p1 = p2 = . . . pk = 0.
Tehat a (4.1) egyenletre vonatkozoan az Rn teret felbonthatjuk egy k dimenzios alter esegy n − k dimenzios alter direkt osszegere. A stabil sokasaghoz meg fogunk adni olyank valtozos ψk+1, ψk+2, . . . , ψn : Es ∩ U → R folytonosan differencialhato fuggvenyeket,hogy a
W locs =
(p1, p2, . . . , pk, ψk+1(p1, . . . , pk), . . . , ψn(p1, . . . , pk)
):
(p1, . . . , pk, 0, . . . , 0) ∈ Es ∩ U
halmaz pozitıvan invarians legyen, es a belole indulo trajektoriak az origohoz tartsanak.A 4.1. abran az n = 3, k = 2 esetben a ψ3 fuggvenyt lathatjuk, melynek grafikonja a ketdimenzios stabil sokasagot adja meg.
Mivel az uj es regi valtozot az x = Px osszefugges koti ossze, azert a (4.1) egyenletheztartozo W loc
s lokalis stabil sokasagbol a P−1W locs = W loc
s linearis transzformacioval kapjukaz eredeti egyenlet lokalis stabil sokasagat. Tehat elegendo a Jordan-normalalaku linearisresszel rendelkezo (4.1) egyenlet eseteben igazolni a tetelt. A tovabbiakban ezert ezt azegyenletet tekintjuk, es W loc
s helyett a W locs jelolest hasznaljuk.
2. Lepes
55

4.1. abra. A stabil sokasagot n = 3 es k = 2 eseten a ψ3 fuggveny grafikonja hatarozzameg.
Mivel a (4.1) rendszer direkt osszeg alaku, azert celszeru az alabbi jelolesek bevezetese.Tetszoleges v ∈ Rn vektor eseten legyen v = vs + vu, ahol
vs =
v1...vk0...0
, vu =
0...0
vk+1...vn
.
Legyen tovabba
Js =
(B 00 0
), Ju =
(0 00 C
).
Ha x megoldasa a (4.1) rendszernek es a = as+au, akkor az xs es xu fuggvenyekre fennall
xs = Jsxs + as(x) (4.2)
xu = Juxu + au(x). (4.3)
Alkalmazzuk a konstans variacios formulat a (4.1) egyenletre, ekkor
x(t) = eJtp+
∫ t
0
eJ(t−τ)a(x(τ))dτ,
56

melyben
eJt =
(eBt 00 eCt
).
A konstans variacios formulat alkalmazhatjuk a (4.2) es (4.3) egyenletre is.
xs(t) = eJstps +
∫ t
0
eJs(t−τ)a(x(τ))dτ (4.4)
xu(t) = eJutpu +
∫ t
0
eJu(t−τ)a(x(τ))dτ, (4.5)
ahol
eJst =
(eBt 00 0
)es eJut =
(0 00 eCt
),
ezert eJstau = 0, azaz eJstas = eJsta, es hasonlo modon eJutas = 0 miatt eJutau = eJuta.A stabil sokasag egy p = ps + pu pontjaban ps = (p1, p2, . . . , pk, 0, . . . , 0)T ,
pu = (0, . . . , 0, ψk+1(p1, . . . , pk), . . . , ψn(p1, . . . , pk))T ,
es ez utobbiakat ugy kell megvalasztani a p1, p2, . . . , pk szamokhoz, hogy a p pontbolindulo megoldas az origohoz tartson t→∞ eseten, azaz fennalljon lim
t→∞xu(t) = 0. A (4.5)
keplet alapjan ez akkor allhat fenn, ha pu+∫∞
0e−Juτa(x(τ))dτ = 0, mivel a Ju matrixban
szereplo C matrix sajatertekei pozitıv valosreszuek, ıgy eJut normaja vegtelenhez tart. Apu vektor ilyen valasztasa mellett
xu(t) = −eJut∫ ∞t
e−Juτa(x(τ))dτ.
Helyettesıtsuk ezt be az x = xs + xu osszefuggesbe, ekkor
x(t) = eJstps +
∫ t
0
eJs(t−τ)a(x(τ))dτ −∫ ∞t
eJu(t−τ)a(x(τ))dτ. (4.6)
A 3. Lepesben megmutatjuk, hogy az origo egy alkalmas U kornyezetet valasztva, min-den ps ∈ Es ∩ U pont eseten a fenti egyenletnek van x megoldasa. Ezutan legyenψj(p1, p2, . . . , pk) := xj(0), j = k + 1, . . . , n. Az ezen fuggvenyek segıtsegevel definialtW locs stabil alterre pedig teljesulnek a tetelben megfogalmazott allıtasok, ugyanis egy
szinten a 3. Lepesben igazolando becsles alapjan, ha p ∈ W locs , akkor a (4.6) megolda-
sakent kapott x fuggvenyre limt→∞
x(t) = 0, azaz limt→∞
ϕ(t, p) = 0. Masreszt a (4.6) fenti
levezetesebol lathato, hogy p /∈ W locs eseten lim
t→∞ϕ(t, p) = 0 nem teljesulhet, ezert W loc
s
pozitıvan invarians. Ugyanis, ha egy p ∈ W locs pontbol indulo megoldas elhagyna a W loc
s
halmazt, akkor nem tarthatna nullahoz t→∞ eseten.
57

3. LepesIgazoljuk, hogy ha a ps ∈ Es pont eleg kozel van az origohoz, akkor van olyan x
fuggveny, amelyre fennall a (4.6) egyenlet, es erre a fuggvenyre limt→∞
x(t) = 0. Az x
fuggveny letezeset szukcesszıv approximacioval bizonyıtjuk. Vezessuk be a folytonos,korlatos fuggvenyek X = Cb([0,+∞),Rn) teret, es azon az ‖x‖ = sup[0,+∞) |x| normat.A (4.6) egyenlet jobb oldalan szereplo kifejezes alapjan vezessuk be a T : X → X(
T (x))(t) = eJstps +
∫ t
0
eJs(t−τ)a(x(τ))dτ −∫ ∞t
eJu(t−τ)a(x(τ))dτ
operatort. Nyilvanvalo, hogy T az egesz X teren ertelmezve van, es egyszeruen igazol-hato, hogy az X terbe kepez. Azt kell igazolnunk, hogy a T lekepezesnek van fixpontja,amely tehat megoldasa a (4.6) egyenletnek. Legyen x0 ∈ X, x0 ≡ 0, es kepezzuk azxn+1 = T (xn) rekurzioval az (xn) ⊂ X fuggvenysorozatot. Teljes indukcioval igazolhato,hogy
|xn+1(t)− xn(t)| ≤ K|ps|e−αt
2n,
ahol K > 0 es α > 0 olyan szamok, melyekkel minden t ≥ 0 eseten fennallnak az
‖eJst‖ ≤ Ke−(α+σ)t, ‖e−Jut‖ ≤ Ke−σt
becslesek, melyekben σ > 0. Ebbol kovetkezik, hogy (xn) ⊂ X Cauchy-sorozat, ıgymivel X teljes metrikus ter, azert konvergal egy x ∈ X fuggvenyhez. Igazolhato, hogy Tfolytonos, ezert az xn+1 = T (xn) rekurziobol n→∞ eseten azt kapjuk, hogy x = T (x),azaz megkaptuk a kıvant fixpontot. Ezenkıvul belathato, hogy ‖xn(t)‖ ≤ Ce−αt mindent ≥ 0 eseten, ıgy ugyanez teljesul az x fuggvenyre is, ami a nullahoz tartasat igazolja.
4.1.2. Globalis sokasagok
A W locs es W loc
u sokasag segıtsegevel definialhatjuk a globalis sokasagokat. Ezek rend-szerint mar nem adhatok meg fuggvenygrafikonkent, ezert a tovabbiakban sokasagkenthivatkozunk rajuk. A stabil sokasagot ugy definialjuk, hogy a belole indulo trajektoriakaz origohoz tartsanak. Mivel az origohoz tarto palyak az origo kozeleben a lokalis sta-bil sokasagban haladnak, azert a globalis stabil sokasagot celszeru a kovetkezokeppendefinialni.
Ws :=⋃t≤0
ϕ(t,W locs ).
Az instabil sokasagot ugy hatarozzuk meg, hogy a belole indulo palyak t → −∞ ese-ten tartanak az origohoz. Mivel az ilyen palyak az origo kozeleben a lokalis instabilsokasagban haladnak, azert az instabil sokasagok a kovetkezokeppen definialjuk.
Wu :=⋃t≥0
ϕ(t,W locu ).
58

A globalis stabil es instabil sokasagnak kozos resze is lehet, egy ilyen peldat mutat a 4.2abra. Az ezen bemutatott rendszernek homoklinikus palyaja van, amely mind a stabil,mind az instabil sokasagnak resze.
4.2. abra. Homoklinikus palya, amely a stabil es instabil sokasag kozos resze.
4.2. Centralis sokasag tetel
A centralis sokasag tetel megfogalmazasa elott vizsgaljuk meg a kovetkezo peldat.
Pelda 4.3. Tekintsuk az
x = xy + x3
y = −y − 2x2
rendszert, es vizsgaljuk a lokalis faziskepet a (0, 0) pont kornyezeteben. A linearizalassal
kapott Jacobi-matrix
(0 00 −1
), ennek sajatertekei 0 es −1. Az origo tehat nem hiper-
bolikus egyensulyi pont, ıgy a lokalis faziskep linearizalassal nem hatarozhato meg. Mivelvan egy negatıv sajatertek, azert a stabil sokasag tetel szerint az origoban a rendszernekvan egy egydimenzios stabil sokasaga, amelyben a palyak az origohoz tartanak. A fejezetvegen meg fogjuk mutatni, hogy a 0 sajatertekhez tartozo sajatalteret erinti egy invari-ans centralis sokasag, amelyben a palyak viselkedese egy egyszeru egyvaltozos rendszervizsgalataval eldontheto.
59

4.2.1. Altalanos megkozelıtes
Tekintsunk ismet egy x = f(x) alaku altalanos autonom rendszert, melyrol feltesszuk,
hogy az origo egyensulyi pontja, azaz f(0) = 0, f ′(0) =
(B 00 C
), ahol B sajatertekei
0 valosreszuek, C sajatertekei pedig nem 0 valosreszuek. A rendszer tehat az x =
(yz
)jelolessel az alabbi alakba ırhato.
y = By + g(y, z) (4.7)
z = Cz + h(y, z), (4.8)
ahol feltetelezzuk, hogy g es h derivaltja az origoban zerus.
Tetel 4.2. (Centralis sokasag tetel). Letezik az origonak egy olyan U kornyezete esletezik olyan ψ : Ec ∩ U → Es ⊕ Eu differencialhato lekepezes, melyre fennallnak azalabbiak.
1. ψ(0) = 0, ψ′(0) = 0.
2. A W locc = (pc, ψ(pc)) : pc ∈ Ec ∩ U lokalis centralis sokasag lokalisan invarians,
azaz ha p ∈ W locc es ϕ(t, p) ∈ U , akkor ϕ(t, p) ∈ W loc
c .
Bizonyıtas. A tetel bizonyıtasa a technikai nehezsegek miatt meglehetosen hosszu, ittcsak az alapgondolatat ismertetjuk vazlatosan Chow es Hale konyve [8] alapjan. Te-
kintsunk egy (pc, ψ(pc)) pontbol indulo
(y(t)z(t)
)megoldast. Erre az invariancia miatt
fennall
y = By + g(y, ψ(y)) (4.9)
z = Cz + h(y, ψ(y)). (4.10)
A masodik egyenletre alkalmazzuk a konstans variacios formulat a t = τ kezdopontotvalasztva.
z(t) = eC(t−τ) · z(τ) +
∫ t
τ
eC(t−s)h
(y(s), ϕ
(y(s)
))ds
Legyen τ < 0 es helyettesıtsunk t = 0 erteket a kepletbe.
ψ(pc) = z(0) = e−Cτ · z(τ) +
∫ 0
τ
e−Csh
(y(s), ψ
(y(s)
))ds (4.11)
60

Tekintsuk azt az esetet, amikor C sajatertekei negatıv valosreszuek. (Az altalanoseset hasonlo modon targyalhato.) Mivel a centralis sokasagban halado megoldasokraidoben visszafele haladva z(t) erteke nem tarthat vegtelenhez, azert
limτ→−∞
e−Cτz(τ) = 0,
ıgy a (4.11) egyenletbol
ψ(pc) =
∫ 0
−∞e−Csh(y(s), ψ(y(s)))ds.
Adott ψ fuggveny eseten tehat kepezzuk a (4.9) differencialegyenlet megoldasat az y(0) =pc kezdeti feltetellel, majd ennek segıtsegevel definialjuk az alabbi operatort.
(T (ψ))(pc) =
∫ 0
−∞e−Csh(y(s), ψ(y(s)))ds.
Errol igazolhato, hogy egy megfeleloen valasztott Banach-teren kontrakcio, ıgy a Banach-fele fixponttetel szerint van fixpontja, amely a kıvant ψ fuggvenyt adja.
A centralis sokasag tetel az alabbi kovetkezmenye, a redukcios tetel, segıtsegevelalkalmazhato a lokalis faziskep meghatarozasara. A tetel bizonyıtasa Carr [5] konyvebentalalhato meg.
Tetel 4.3. (Redukcios tetel). Tekintsuk a (4.7)-(4.8) rendszert, amely teljesıti a fentmegadott felteteleket. Legyen ψ az origoban a centralis sokasagot meghatarozo fuggveny.Vezessuk be az un. centralis sokasag redukcioval az alabbi rendszert.
u = Bu+ g(u, ψ(u) (4.12)
v = Cv, (4.13)
ahol tehat a hiperbolikus reszben a linearis reszt hasznaljuk. Ekkor a (4.7)-(4.8) rendszeres a (4.12)-(4.13) rendszer lokalisan topologikusan ekvivalens az origoban.
Megjegyzes 4.1. Ez a tetel a Hartman–Grobman-tetel altalanosıtasa olyan esetre, amely-nel a linearis resz nem hiperbolikus. A tetel dimenziocsokkentest tesz lehetove, hiszen azu fuggvenyre vonatkozo, alacsonyabb dimenzios rendszer faziskepenek meghatarozasavala teljes rendszer faziskepe meghatarozhato, mivel a v fuggvenyre vonatkozo hiperbolikuslinearis rendszer faziskepe egyszeruen vizsgalhato.
A tovabbiakban azt mutatjuk meg, hogy a redukcios tetel praktikusan hogyan alkal-mazhato a lokalis faziskep vizsgalatara.
61

4.2.2. A centralis sokasag approximacioja
A redukcios tetel alkalmazasahoz ismerni kell a centralis sokasagot megado ψ fuggvenyt,amelyet explicit modon kiveteles esetektol eltekintve nem tudunk kiszamıtani. Ebbena szakaszban megmutatjuk, hogy a centralis sokasag kozelıto kiszamıtasa is elegendo afaziskep jellemzesehez.
Valasszunk egy centralis sokasagon halado x(t) =
(y(t)z(t)
)megoldast. Erre az invari-
ancia miatt fennall z(t) = ψ(y(t)), melyet differencialva z = ψ′(y) · y. Igy
z = Cy + h(y, ψ(y)) = ψ′(y) · (By + g(y, ψ(y))) (4.14)
egy ujabb egyenlet a ψ fuggvenyre. Bar a Banach-fele fixponttetel alkalmazasara eznem ad lehetoseget, arra alkalmas, hogy a ψ sorfejtesenek tagjait ennek segıtsegevelmeghatarozzuk. Az alabbi approximacios tetel szerint, ha a fenti egyenlet valamilyenr-ed rendu tagig fennall egy ψ fuggvenyre, akkor ez a fuggveny r-ed rendben kozelıti aψ fuggvenyt.
Tetel 4.4. (Centralis sokasag approximacioja). Legyen ψ : Ec∩U → Es⊕Eu olyanfuggveny, melyre
1. ψ(0) = 0, ψ′(0) = 0.
2. (4.14) teljesul r-ed rendben.
Ekkor |ψ(y)− ψ(y)| = O(|y|r), azaz ψ es ψ sorfejtese r-ed rendben megegyezik.
Az eddigi eredmenyek alkalmazasakent tekintsuk ismet a szakasz elejen bemutatottpeldat.
Pelda 4.4.
x = xy + x3 (4.15)
y = −y − 2x2. (4.16)
Ekkor f ′(0, 0) =
(0 00 −1
), az Es stabil alteret a (0, 1), az Ec centralis alteret pedig az
(1, 0) vektor adja meg. Keressuk a centralis sokasagot meghatarozo ψ fuggveny kozelıtesetaz alabbi alakban: ψ(x) = a2x
2 + a3x3 + . . .. Itt tehat felhasznaltuk, hogy a centralis
sokasag a centralis alteret erinti az origoban, azaz ψ megadhato x fuggvenyekent. Ekkoraz invariancia miatt y(t) = ψ(x(t)), melyet derivalva y(t) = ψ′(x(t))·x(t). Helyettesıtsukbe ebbe az egyenletbe az x es y derivaltjat a differencialegyenletbol. Ekkor a −ψ(x) −2x2 = ψ′(x)(x · ψ(x) + x3) egyenletet kapjuk a ψ fuggvenyre. Fejezzuk ki ebben a ψ-ta sorfejtesenek tagjaival, majd tegyuk egyenlove az egyenlet ket oldalan szereplo azonos
62

hatvanyhoz tartozo tagokat. Ekkor x2 egyutthatoibol a −a2 − 2 = 0 osszefuggest kapjuk,melybol a2 = −2. Igy a centralis sokasagot megado fuggvenyre ψ(x) = −2x2 + O(x3),azaz centralis sokasag masodrendu approximacioja ψ(x) = −2x2. Helyettesıtsuk most aredukalt rendszer elso egyenletebe a ψ(x) = −2x2 +O(x3) fuggvenyt. Ekkor
x = x(−2x2 + a3x3 + . . .) + x3 = −x3 +O(x4)
Ezen egyenlet origo koruli faziskepe nem fugg az O(x4) tagoktol, hiszen azok a palyakiranyat az origo kozeleben nem befolyasoljak. Tehat ebben a rendszerben a palyak azorigo kozeleben az origohoz tartanak, azaz a centralis sokasagon az origohoz kozeledneka megoldasok. Mivel a rendszer nem nulla sajaterteke negatıv, azert lokalisan mindenmegoldas az origohoz tart, azaz a redukcios tetel segıtsegevel igazoltuk, hogy az origoaszimptotikusan stabilis. A faziskepet a 4.4 abra mutatja.
A (4.15)-(4.16) rendszer faziskepe.
4.3. Feladatok
1. Hatarozzuk meg az egyensulyi pontokat es azok tıpusat az alabbi ketdimenziosrendszerekben:
(a) x = y, y = − sinx− 3y
Megoldas: Az egyensulyi pontok (kπ, 0) minden k ∈ Z eseten. A rendszerJacobi matrixa
J =
(0 1
− cosx −3
).
63

A matrix nyoma Tr(J) = −3, determinansa Det(J) = cos x. Ezek elojelealapjan eldontheto a sajatertekek valosreszenek elojele, ıgy paros k eseten azegyensulyi pont stabil csomo, paratlan k eseten pedig nyereg.
(b) x = y2 − 1, y = x2 + y2 − 2
Megoldas: Az elso egyenlet alapjan az egyensulyi pontok masodik koordi-nataja ±1, majd a masodik egyenletbol az elso koordinata is ±1 az elsotolfuggetlenul. Igy az egyensulyi pontok: (1, 1), (1,−1), (−1, 1), (−1,−1). Arendszer Jacobi matrixa
J =
(0 2y
2x 2y
)ezert Tr(J) = 2y, Det(J) = −4xy, Tr2(J)− 4Det(J) = 4y(y+ 4x). Az (1, 1)es (−1,−1) pontban Det(J) < 0, ıgy ezek nyeregpontok. Az (1,−1) pontbanTr(J) < 0, Det(J) > 0 es Tr2(J)−4Det(J) < 0, ezert ez stabil fokusz. Vegula (−1, 1) pontban Tr(J) > 0, Det(J) > 0 es Tr2(J)− 4Det(J) < 0, ezert ezinstabil fokusz.
(c) x = x2 + y2 − 25, y = xy − 12
Megoldas: Az masodik egyenletbol y = 12/x. Ezt behelyettesıtve az elsoegyenletbe x4 − 25x2 + 122 = 0, melybol x = ±3 vagy x = ±43. A megfeleloy erteket az y = 12/x keplet adja. Igy az egyensulyi pontok: (3, 4), (−3,−4),(4, 3), (−4,−3). A rendszer Jacobi matrixa
J =
(2x 2yy x
),
ezert Tr(J) = 3x, Det(J) = 2(x2 − y2), Tr2(J) − 4Det(J) = x2 + 8y2 > 0.A (3, 4) es (−3,−4) pontban Det(J) < 0, ıgy ezek nyeregpontok. A (4, 3)pontban Tr(J) > 0, Det(J) > 0 es Tr2(J) − 4Det(J) > 0, ezert ez instabilcsomo. Vegul a (−4,−3) pontban Tr(J) < 0, Det(J) > 0 es Tr2(J) −4Det(J) > 0, ezert ez stabil csomo.
(d) x = −y, y = x3 − x+ xy
Megoldas: Az elso egyenletbol y = 0, majd a masodikbol x = 0, x = 1 vagyx = −1. Igy az egyensulyi pontok: (0, 0), (1, 0), (−1, 0). A rendszer Jacobimatrixa
J =
(0 −1
3x2 − 1 + y x
),
ezert Tr(J) = x, Det(J) = 3x2− 1 + y, Tr2(J)− 4Det(J) = 4− 11x2− 4y. A(0, 0) pontban Det(J) < 0, ıgy ez nyeregpont. Az (1, 0) pontban Tr(J) > 0,Det(J) > 0 es Tr2(J)−4Det(J) < 0, ezert ez instabil fokusz. Vegul a (−1, 0)pontban Tr(J) < 0, Det(J) > 0 es Tr2(J) − 4Det(J) < 0, ezert ez stabilfokusz.
64

(e) x = y − x2 − x, y = 3x− x2 − yMegoldas: Az egyensulyi pontokra vonatkozo ket egyenletet kivonva egymas-bol 2y− 4x = 0, azaz y = 2x. Ezt az elso egyenletbe helyettesıtve x− x2 = 0,melybol x = 0 vagy x = 1. Igy az egyensulyi pontok: (0, 0) es (1, 2). Arendszer Jacobi matrixa
J =
(−2x− 1 13− 2x −1
),
melyre a (0, 0) pontban Tr(J(0, 0)) = −2, Det(J(0, 0)) = −2, ıgy a (0, 0) pontnyereg. Az (1, 2) pontban Tr(J(1, 2)) = −4, Det(J(1, 2)) = 2, Tr2(J(1, 2))−4Det(J(1, 2)) > 0, ıgy az (1, 2) pont stabil csomo.
2. Hatarozzuk meg az egyensulyi pontokat, es azokban a linearizalt rendszer stabil,instabil es centralis alterenek dimenziojat az alabbi harom dimenzios rendszerek-ben.
(a) x = y, y = z, z = x2 − yz − 1
Megoldas: Az elso ket egyenletbol y = 0 es z = 0, majd a harmadikbol x = 1vagy x = −1. Igy az egyensulyi pontok: (1, 0, 0) es (−1, 0, 0). A rendszerJacobi matrixa
J =
0 1 00 0 1
2x −z −y
,
melynek karakterisztikus egyenlete a (±1, 0, 0) pontokban λ3 = ±2. Az(1, 0, 0) pontban tehat a linearizalt rendszer sajatertekei (azaz a λ3 = 2 egyen-let gyokei) λ1 = 3
√2, λ2,3 = 3
√2(cos(2π/3)± i sin(2π/3)). Igy dim(Es) = 2 es
dim(Eu) = 1. A (−1, 0, 0) pontban a linearizalt rendszer sajatertekei (azaz aλ3 = −2 egyenlet gyokei) λ1 = − 3
√2, λ2,3 = − 3
√2(cos(2π/3) ± i sin(2π/3)).
Igy dim(Es) = 1 es dim(Eu) = 2.
(b) x = y + z, y = x2 − 2y, z = x+ y
Megoldas: Az utolso egyenletbol y = −x, majd a masodikbol x2 + 2x = 0,azaz x = 0, vagy x = −2. Ebbol y = 0, illetve y = 2, valamint az elso egyenletalapjan z = 0 es z = −2. Igy az egyensulyi pontok: (0, 0, 0) es (−2, 2,−2). Arendszer Jacobi matrixa
J =
0 1 12x −2 01 1 0
.
Ennek karakterisztikus egyenlete λ3 +2λ2−λ(1+2x)−2(1+x) = 0. A (0, 0, 0)pontban a karakterisztikus egyenlet λ3 + 2λ2− λ− 2 = 0. Vegyuk eszre, hogy
65

ennek egyik gyoke λ1 = 1, ıgy λ3 + 2λ2 − λ − 2 = (λ − 1)(λ2 + 3λ + 2). Amasodfoku tag gyokei λ2 = 1, λ3 = 2. Igy a (0, 0, 0) pontban a dim(Eu) = 3.A (−2, 2,−2) pontban a karakterisztikus egyenlet λ3 + 2λ2 + 3λ + 2 = 0.Vegyuk eszre, hogy ennek egyik gyoke λ1 = −1, ıgy λ3 + 2λ2 + 3λ + 2 =(λ + 1)(λ2 + λ + 2). A masodfoku tag gyokei negatıv valosreszuek, ıgy a(−2, 2,−2) pontban a dim(Es) = 3.
3. Hatarozzuk meg az x = σ(y−x), y = ρx−y−xz, z = −βz+xy Lorenz rendszerbena σ, ρ, β > 0 parameterek fuggvenyeben az origoban mint egyensulyi pontban alinearizalt rendszer stabil, instabil es centralis alterenek dimenziojat.
Megoldas: A rendszer Jacobi matrixa az origoban
J =
−σ σ 0ρ −1 00 0 −β
.
Ennek karakterisztikus egyenlete λ3 +λ2(β+σ+1)+λ(β(σ+1)+σ(1−ρ))+βσ(1−ρ) = 0. Ennek egyik gyoke β (ezt a matrix blokk diagonalis alakjabol lathatjuk),ıgy a masik ket gyok a masodfoku egyenlet megoldokepletenek segıtsegevel
λ1,2 =1
2(−1− σ ±
√(1 + σ)2 − 4σ(1− ρ))
Konnyen lathato, hogy ρ < 1 eseten mindharom gyok negatıv, azaz a stabil alterharom dimenzios. Ha ρ = 1, akkor az egyik sajatertek nulla, a masik ketto pedignegatıv, ezert a stabil alter ketdimenzios, a centralis alter pedig egydimenzios. Haρ > 1, akkor λ1 > 0, λ2, λ3 < 0, azaz az instabil alter egydimenzios, a stabil alterpedig ketdimenzios.
4. Hatarozzuk meg az x = σ(y−x), y = ρx−y−xz, z = −βz+xy Lorenz rendszerben aσ, ρ, β > 0 parameterek fuggvenyeben az egyensulyi pontokat, es azok stabilitasat.
Megoldas: Az elso egyenletbol y = x, majd az utolsobol z = x2/β. Ezeket amasodik egyenletbe helyettesıtve x(ρ − 1)β = x3. Ennek x1 = 0 megoldasa aparameterek barmely ertekere, es ρ > 1 eseten x2,3 = ±
√(ρ− 1)β is megoldasok.
Tehat ρ ≤ 1 eseten az egyetlen egyensulyi pont (0, 0, 0), mıg ρ > 1 eseten ezenkıvul(x2, x2, ρ− 1) es (x3, x3, ρ− 1) is egyensulyi pontok. A rendszer Jacobi matrixa
J =
−σ σ 0ρ− z −1 −xy x −β
.
Az origoban felırt Jacobi-matrix karakterisztikus egyenlete λ3 + λ2(β + σ + 1) +λ(β(σ+1)+σ(1−ρ))+βσ(1−ρ) = 0. Az origo stabilitasanak eldontesehez tudnunk
66

kell, hogy az egyenlet minden megoldasa negatıv valos reszu. Ennek eldonteserealkalmazzuk most a Routh–Hurwitz feltetelt (bar, mivel az egyenletnek az egyikgyoke β, ıgy a masik ket gyok is keplettel egyszeruen megadhato). Az egyenlet baloldalan allo polinom egyutthatoibol keszıtsuk el a Routh-Hurwitz matrixot. β + σ + 1 1 0
βσ(1− ρ) β(σ + 1) + σ(1− ρ) β + σ + 10 0 βσ(1− ρ)
A matrix pontosan akkor pozitıv definit, ha a ∆1, ∆2, ∆3 fominorok pozitıvak.Mivel ∆1 = β+σ+ 1 > 0, es ∆3 = ∆2βσ(1− ρ), azert a stabilitas ∆2 > 0 es ρ < 1eseten allhat fenn. A ∆2 determinans
∆2 = (β + σ + 1)(β(σ + 1) + σ(1− ρ))− βσ(1− ρ)
= (β2 + β(σ + 1) + σ(1− ρ))(σ + 1)
pozitıv, ha ρ < 1. Igy a Lorenz-rendszerben az origo aszimptotikus stabilis ρ < 1eseten, es instabilis ρ > 1 eseten. Az (x2, x2, ρ− 1) pontban felırt Jacobi-matrix −σ σ 0
1 −1 −√β(ρ− 1)√
β(ρ− 1)√β(ρ− 1) −β
.
Ennek karakterisztikus egyenlete
λ3 + λ2(β + σ + 1) + λβ(σ + ρ) + 2βσ(ρ− 1) = 0.
Az (x2, x2, ρ − 1) pont stabilitasahoz igazolnunk kell, hogy az egyenlet mindenmegoldasa negatıv valos reszu. Ennek eldontesere alkalmazzuk a Routh-Hurwitzfeltetelt. Az egyenlet bal oldalan allo polinom egyutthatoibol keszıtsuk el a Routh-Hurwitz matrixot. β + σ + 1 1 0
2βσ(ρ− 1) β(σ + ρ) β + σ + 10 0 2βσ(ρ− 1)
A matrix pontosan akkor pozitıv definit, ha a ∆1, ∆2, ∆3 fominorok pozitıvak.Mivel ∆1 = β + σ + 1 > 0, es ∆3 = 2βσ(ρ − 1)∆2, azert a stabilitas ∆2 > 0 esρ > 1 eseten all fenn. A ∆2 determinans
∆2 = β(β + σ + 1)(σ + ρ) + 2βσ(1− ρ)
= β(σ(β + σ + 3)− ρ(σ − β − 1))
67

pozitıv, barmely ρ > 1 eseten, ha σ − β − 1 < 0, illetve 1 < ρ < ρH := σ σ+β+3σ−β−1
eseten, ha σ − β − 1 > 0. Ekkor tehat az (x2, x2, ρ − 1) pont aszimptotikusanstabilis. Megjegyezzuk, hogy igazolhato, hogy ∆2 < 0 eseten a Jacobi matrixnakket pozitıv valosreszu komplex sajaterteke van. A rendszer szimmetriaja miatt az(x3, x3, ρ − 1) egyensulyi pont stabilitasara ugyanazt a feltetelt kapjuk, mint az(x2, x2, ρ− 1) pont eseteben.
68
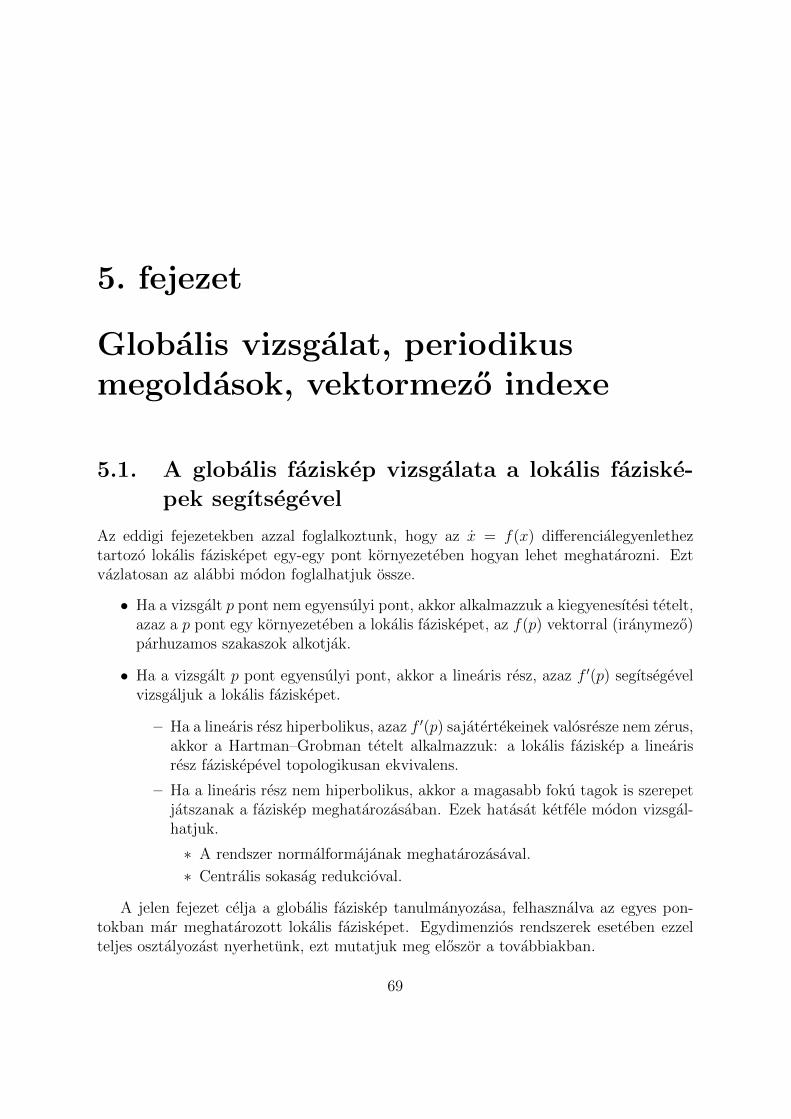
5. fejezet
Globalis vizsgalat, periodikusmegoldasok, vektormezo indexe
5.1. A globalis faziskep vizsgalata a lokalis faziske-
pek segıtsegevel
Az eddigi fejezetekben azzal foglalkoztunk, hogy az x = f(x) differencialegyenletheztartozo lokalis faziskepet egy-egy pont kornyezeteben hogyan lehet meghatarozni. Eztvazlatosan az alabbi modon foglalhatjuk ossze.
• Ha a vizsgalt p pont nem egyensulyi pont, akkor alkalmazzuk a kiegyenesıtesi tetelt,azaz a p pont egy kornyezeteben a lokalis faziskepet, az f(p) vektorral (iranymezo)parhuzamos szakaszok alkotjak.
• Ha a vizsgalt p pont egyensulyi pont, akkor a linearis resz, azaz f ′(p) segıtsegevelvizsgaljuk a lokalis faziskepet.
– Ha a linearis resz hiperbolikus, azaz f ′(p) sajatertekeinek valosresze nem zerus,akkor a Hartman–Grobman tetelt alkalmazzuk: a lokalis faziskep a linearisresz faziskepevel topologikusan ekvivalens.
– Ha a linearis resz nem hiperbolikus, akkor a magasabb foku tagok is szerepetjatszanak a faziskep meghatarozasaban. Ezek hatasat ketfele modon vizsgal-hatjuk.
∗ A rendszer normalformajanak meghatarozasaval.
∗ Centralis sokasag redukcioval.
A jelen fejezet celja a globalis faziskep tanulmanyozasa, felhasznalva az egyes pon-tokban mar meghatarozott lokalis faziskepet. Egydimenzios rendszerek eseteben ezzelteljes osztalyozast nyerhetunk, ezt mutatjuk meg eloszor a tovabbiakban.
69

5.1.1. Globalis faziskep 1 dimenzioban
Az egydimenzios rendszerek faziskepenek meghatarozasa lenyegeben a jobboldal elojele-nek meghatarozasara redukalhato. Nezzuk meg ezt eloszor egy egyszeru peldan.
Pelda 5.1. Tekintsuk az x = x − x3 differencialegyenletet. Az f(x) = x − x3 fugg-veny gyokei a −1, 0, es az 1 szamok, a fuggveny elojelet pedig ezek kozott egyszeruenmegallapıthatjuk, a (−∞,−1) es (0, 1) intervallumokon pozitıv, a (−1, 0) es (1,+∞) in-tervallumokon pedig negatıv. A fuggveny grafikonjat az 5.1. abran lathatjuk. Tehat azegyenletnek harom egyensulyi pontja van, a −1, 0, es az 1 pontok, ezen kıvul ket pozi-tıv iranyıtasu palyaja a (−∞,−1) es (0, 1) intervallum, valamint ket negatıv iranyıtasupalyaja a (−1, 0) es (1,+∞) intervallum. Igy a fuggveny elojelenek megallapıtasavalegyszeruen megkapjuk az 5.1. abran lathato globalis faziskepet.
5.1. abra. Az x = x− x3 differencialegyenlet faziskepe.
Terjunk ra most az x = f(x) alaku egyenlet faziskepeinek osztalyozasara, ahol f :R → R egyszeruseg kedveert folytonosan differencialhato fuggveny. Az osztalyozast azf gyokeinek szama szerint vegezzuk a fenti pelda tanulsaga alapjan.
• Ha az f fuggvenynek nincs gyoke, akkor az egyenletnek nincs egyensulyi pontja.Ekkor a faziskep az x = 1 egyenlet faziskepevel ekvivalens, melyet az 5.2. abramutat. (Megjegyezzuk, hogy ha f negatıv, akkor is ezzel ekvivalens a faziskep.)
70

• Ha az f fuggvenynek egy gyoke van, akkor az egyenletnek egy egyensulyi pontjavan. Ekkor a faziskep az alabbi harom kozul valamelyikkel ekvivalens, melyeketaz 5.3. abran lathatunk.
x = −x x = x
x = x2
• Ha az f fuggvenynek ket gyoke van, akkor az egyenletnek ket egyensulyi pontjavan. Ezek lehetnek stabil, instabil es neutralis (egyik oldalrol stabil, masik oldalrolinstabil) tıpusuak. Igy negy eset lehetseges a faziskep szempontjabol: 1. egy stabiles egy instabil egyensulyi pont van, 2. egy stabil es egy neutralis egyensulyi pontvan, 3. egy instabil es egy neutralis egyensulyi pont van, 4. ket neutralis egyensulyipont van. Ezen eseteknek megfelelo faziskepeket az 5.4. abran lathatjuk.
Hasonlo modon osztalyozhatjuk az n gyokhellyel rendelkezo fuggvenyeket. Megje-gyezzuk, hogy elofordulhat vegtelen sok egyensulyi pont, peldaul az f(x) = sin x fugg-veny eseteben, sot, az egyensulyi pontok torlodhatnak is, peldaul az f(x) = x2 · sin 1
x
fuggveny eseteben, azonban ezekkel itt nem foglalkozunk.
5.2. abra. Az x = f(x) differencialegyenlet faziskepe, ha az f fuggvenynek nincs gyoke.
71

5.3. abra. Az x = f(x) differencialegyenlet harom lehetseges faziskepe, ha az f fugg-venynek egy gyoke van.
5.4. abra. Az x = f(x) differencialegyenlet negy lehetseges faziskepe, ha az f fuggvenynekket gyoke van.
72

5.1.2. Globalis faziskep 2 dimenzioban
Tekintsuk az
x = P (x, y),
y = Q(x, y)
ketvaltozos rendszert, melyben P,Q : R2 → R folytonosan differencialhato fuggvenyek.Celunk a teljes faziskep jellemzese, melyhez a kovetkezo modszereket lehet hasznalni.
• Az iranymezo es a nullavonalak megrajzolasa.
• Transzformacio polar koordinatakba, vagy komplex valtozora.
• Elso integral es Ljapunov-fuggveny keresese.
• A (P,Q) vektormezo szimmetriajanak felhasznalasa.
Ezen modszerek alkalmazasan tul termeszetesen a differencialegyenletek (megfelelokezdeti feltetelekbol indıtott) numerikus megoldasanak abrazolasa segıt meghatarozni afaziskepet. Az alabbiakban ismertetjuk ezen modszereket, es peldakon szemleltetjuk azalkalmazasukat.
Iranymezo es nullavonalak
Az iranymezo nem mas, mint a (P,Q) : R2 → R2 fuggveny, amely a fazissık mindenpontjahoz olyan ketdimenzios vektort rendel, amely eppen a ponton athalado trajektoriaerintoje. A faziskep elkeszıtesehez sokszor eleg annyit tudni, hogy az iranymezo az egyespontokban fel vagy le, illetve balra vagy jobbra mutat. Ennek eldonteseben segıtenek az
N1 := p ∈ R2 : P (p) = 0 N2 := p ∈ R2 : Q(p) = 0
nullavonalak. Az N1 nullavonal ket (nem feltetlenul osszefuggo) reszre osztja a fazissıkot.Az egyikben, melyben P > 0, a trajektoriak jobbra, a masikban, melyben P < 0,a trajektoriak balra haladnak. Hasonlokeppen az N2 nullavonal ket (nem feltetlenulosszefuggo) reszre osztja a fazissıkot. Az egyikben, melyben Q > 0, a trajektoriak felfele,a masikban, melyben Q < 0, a trajektoriak lefele haladnak. Igy az N1 es N2 nullavonalnegy reszre bontja a fazissıkot, amelyek mindegyikeben egyszeruen eldontheto, hogy atrajektoria fel vagy le, illetve balra vagy jobbra mozog. (A trajektoria mozgasa kifejezesthasznaljuk, valojaban t novekedtevel a ϕ(t, p) pont mozog a trajektoria menten.)
A nullavonalak metszespontjai az egyensulyi pontok, ezekben P es Q erteke is zerus.Az egyensulyi pontok kornyezeteben linearizalassal hatarozhatjuk meg a faziskep szerke-zetet. A globalis faziskephez a nyeregpontok szeparatrixainak (a nyeregpontba befuto,illetve onnan kiindulo ket-ket palya) elhelyezkedeset kell meghatarozni. Ebben is sokszorsegıt az iranymezo. A faziskep iranymezovel torteno jellemzeset egy peldan szemleltetjuk.
73

Pelda 5.2. Tekintsuk azx = x− xy, y = x2 − y
rendszert. Az N1 nullavonal egyenlete x(1− y) = 0. Azaz ez a nullavonal ket egyenesbol,az (x, y) ∈ R2;x = 0 es az (x, y) ∈ R2; y = 1 egyenesbol all. Ezek negy tartomanyraosztjak a fazissıkot. A jobb felso es bal also tartomanyban balra, a masik kettoben jobbramozognak a trajektoriak. Mivel az x = 0 egyenes is a nullavonal resze, azert ez invariansegyenes, hiszen x = 0 eseten x = 0. Az N2 nullavonal egyenlete y = x2, ez tehat egyparabola. A parabola feletti reszen y < 0, tehat lefele mozognak a trajektoriak, a parabolaalatt pedig y > 0, tehat felfele mozognak a trajektoriak. A ket nullavonal egyutt nyolcreszre osztja a fazissıkot. Az 5.2. abran mindegyik reszben egy-egy nyıl mutatja a trajek-toria erintovektoranak iranyat. A rendszer egyensulyi pontjait es azok tıpusat a szokottmodon hatarozhatjuk meg. A (0, 0) pont nyereg, az (1, 1) es (−1, 1) pont pedig stabilfokusz. A nyeregpontba befuto szeparatrix az x = 0 invarians egyenes, a nyeregpontbolkiindulo palyakrol pedig az iranymezo alapjan azt mondhatjuk, hogy a stabilis fokuszokbafutnak bele (ez egyebkent bizonyıtasra szorul, ugyanis az iranymezo alapjan az is elkep-zelheto lenne, hogy ezek a palyak vegtelenbe tartanak). Hasonloan igazolhato, hogy a jobbfelsıkbol indulo megoldasok mind az (1, 1) stabilis fokuszpontba futnak be (t → +∞ ese-ten, a bal felsıkbol indulo megoldasok pedig a (−1, 1) stabilis fokuszpontba jutnak). Ezzelmegkaptuk az abran lathato faziskepet.
Az 5.2. Peldaban szereplo differencialegyenlet-rendszer faziskepenek meghatarozasaaz iranymezo segıtsegevel.
74

Pelda 5.3. Tekintsuk az
x = 2x+ y2 − 1, y = 6x− y2 + 1
rendszert. Hatarozzuk meg eloszor az egyensulyi pontokat. A ket egyenletet osszeadva8x = 0, majd az elsobol y = ±1. Igy az egyensulyi pontok (0, 1) es (0,−1). A rendszerJacobi-matrixa
J =
(2 2y6 −2y
).
A (0, 1) egyensulyi pontban J(0, 1) =
(2 26 −2
), melyre Tr(J(0, 1)) = 0, Det(J(0, 1)) =
−16, ıgy (0, 1) nyereg. A (0,−1) egyensulyi pontban J(0,−1) =
(2 −26 2
), melyre
Tr(J(0,−1)) = 4, Det(J(0,−1)) = 16, Tr2(J(0,−1)) − 4Det(J(1, 2)) < 0, ıgy (0,−1)instabilis fokusz. Az N1 nullavonal egyenlete x = (1 − y2)/2, azaz ez a nullavonal egyfekvo, balfele nyitott parabola, mely ket tartomanyra osztja a fazissıkot. A jobboldalitartomanyban jobbra, a baloldaliban balra mozognak a trajektoriak. Az N2 nullavonalegyenlete x = (y2 − 1)/6, ez tehat egy fekvo, jobbfele nyitott parabola, mely ket tarto-manyra osztja a fazissıkot. A baloldali reszen y < 0, tehat lefele mozognak a trajektoriak,a jobboldalin pedig y > 0, tehat felfele mozognak a trajektoriak. A ket nullavonal egyuttot reszre osztja a fazissıkot. A nyeregpontbol kiindulo palyak ∞-hez tartanak. A nyereg-pontba befuto egyik szeparatrix az instabil fokuszbol, a masik vegtelenbol jon (az abranezek pirossal vannak jelolve). Nehany pontbol indulo palyat numerikusan kiszamıtva,az 5.3. abran lathato faziskepet kapjuk.
Az 5.3. Peldaban szereplo differencialegyenlet-rendszer faziskepenek meghatarozasaaz iranymezo segıtsegevel.
Pelda 5.4. Tekintsuk az
x = xy − 4, y = (x− 4)(y − x)
rendszert. Hatarozzuk meg eloszor az egyensulyi pontokat. A masodik egyenletbol x = 4vagy y = x, majd ezeknek megfeleloen az elsobol y = 1, illetve x = ±2. Igy az egyensulyipontok (4, 1), (2, 2) es (−2,−2). A rendszer Jacobi-matrixa
J =
(y x
y − 2x+ 4 x− 4
).
A (4, 1) egyensulyi pontban J(4, 1) =
(1 4−3 0
), melyre Tr(J(4, 1)) = 1, Det(J(4, 1)) =
9, Tr2(J(4, 1))− 4Det(J(4, 1)) < 0, ıgy (4, 1) instabilis fokusz. A (2, 2) egyensulyi pont-
ban J(2, 2) =
(2 22 −2
), melyre Tr(J(2, 2)) = 0, Det(J(2, 2)) = −8, ıgy (2, 2) nyereg.
75

A (−2,−2) egyensulyi pontban J(−2,−2) =
(−2 −26 −6
), melyre Tr(J(−2,−2)) = −8,
Det(J(−2,−2)) = 24, Tr2(J(−2,−2)) − 4Det(J(−2,−2)) < 0, ıgy (−2,−2) stabilisfokusz. Az N1 nullavonal egyenlete y = 4/x, azaz ez a nullavonal hiperbola, mely ha-rom tartomanyra osztja a fazissıkot. A kozepso (ket hiperbolaag kozotti) tartomanybanbalra, a ket szelso tartomanyban pedig jobbra mozognak a trajektoriak. Az N2 nullavonalaz x = 4 es x = y egyenesekbol all, melyek negy tartomanyra osztjak a fazissıkot. Abaloldali felso es jobboldali also reszen y < 0, tehat lefele mozognak a trajektoriak, ajobboldali felso es baloldali also reszen pedig y > 0, tehat felfele mozognak a trajektoriak.A ket nullavonal egyutt 9 reszre osztja a fazissıkot. A nyeregpontbol kiindulo palyak astabil fokuszba futnak be. A nyeregpontba befuto szeparatrixok kozul az egyik az instabilfokuszbol jon, a masik pedig vegtelenbol. Ezen palyakon kıvul minden mas palya a stabilfokuszba fut be. Nehany pontbol indulo palyat numerikusan kiszamıtva, az 5.4. abranlathato faziskepet kapjuk.
Az 5.4. Peldaban szereplo differencialegyenlet-rendszer faziskepenek meghatarozasaaz iranymezo segıtsegevel.
Transzformacio polar koordinatakba, vagy komplex valtozora
Az x = P (x, y), y = Q(x, y) rendszerhez vezessuk be az r es φ fuggvenyeket az x(t) =r(t) cos(φ(t)), y(t) = r(t) sin(φ(t)) transzformacios kepletekkel. Ezekbol
x = r cos(φ)− rφ sin(φ), y = r sin(φ) + rφ cos(φ).
76

Az elso egyenletet cos(φ)-vel, a masodikat sin(φ)-vel szorozva, majd a ket egyenletetosszeadva es felhasznalva a differencialegyenleteket
r = P (r cos(φ), r sin(φ)) cos(φ) +Q(r cos(φ), r sin(φ)) sin(φ).
Hasonlokeppen az elso egyenletet sin(φ)-vel, a masodikat cos(φ)-vel szorozva, majd a ketegyenletet kivonva egymasbol es felhasznalva a differencialegyenleteket
φ = Q(r cos(φ), r sin(φ)) cos(φ)− P (r cos(φ), r sin(φ)) sin(φ).
Bizonyos esetekben az r es φ fuggvenyekre felırt egyenletek egyszeru alakuak es lehetoveteszik a faziskep meghatarozasat. A legegyszerubb pelda a centrum esete, amikor azegyenletek x = −y es y = x. Ebbol egyszeruen kapjuk, hogy r = 0 es φ = 1, melyekmutatjak, hogy a palyak origo kozepu korok.
Komplex valtozo bevezetese is celravezeto lehet szamos esetben. Vezessuk be a z(t) =x(t) + iy(t) fuggvenyt. Erre a differencialegyenlet
z = x+ iy = P (Re(z), Im(z)) + iQ(Re(z), Im(z)).
A transzformacio akkor celravezeto, ha a jobboldal kozvetlenul z fuggvenyekent fejezhetoki, a valos es kepzetes resz hasznalata nelkul. A legegyszerubb pelda ekkor is a centrumesete, amikor az egyenletek x = −y es y = x. Ebbol z = iz, melynek megoldasaz(t) = exp(it), ebbol pedig megkaphatjuk az x es y fuggvenyek kepletet. Valamintkonnyen lathato, hogy |z(t)| allando, azaz a palyak korok.
77

Pelda 5.5. Tekintsuk az
x = x(1− x2 − y2)− y, y = y(1− x2 − y2) + x
rendszert. A fent ismertetett modszert kovetve vezessuk be az r es φ fuggvenyeket azx(t) = r(t) cos(φ(t)), y(t) = r(t) sin(φ(t)) transzformacios kepletekkel. Ekkor a fentikepleteket felhasznalva az uj ismeretlen fuggvenyekre az r = r(1 − r2), φ = 1 differenci-alegyenleteket kapjuk. Mivel r = 1 eseten r = 0, azert az r = 1 korvonal invarians, esφ = 1 miatt pozitıv iranyban haladnak rajta a megoldasok. Ha r < 1, akkor r > 0, azaza kor belsejeben a sugar novekszik, a palyak az r = 1 korvonalhoz kozelednek. Ha r > 1,akkor r < 0, azaz a koron kıvul a sugar csokken, a palyak szinten az r = 1 korvonalhozkozelednek. A faziskep tehat az origobol, mint instabil fokuszbol, az r = 1 korvonalbol,mint stabil hatarciklusbol, es ezen hatarciklusra (belulrol es kıvulrol) racsavarodo palyak-bol all, amint az 5.5. abran lathatjuk.
Az 5.5. Peldaban szereplo differencialegyenlet-rendszer faziskepenek meghatarozasapolarkoordinatakra valo transzformacioval.
Komplex valtozo bevezetesenek alkalmazasara nezzuk a kovetkezo peldat.
Pelda 5.6. Tekintsuk azx = x2 − y2, y = 2xy
rendszert. Vezessuk be a z(t) = x(t) + iy(t) fuggvenyt. Erre a differencialegyenletz = x+ iy = P (Re(z), Im(z))+ iQ(Re(z), Im(z)), azaz z = z2. Ez szetvalaszthato valto-zoju differencialegyenlet, osszuk el z2-tel, majd integraljuk. Ekkor az egyenlet megoldasa
78

z(t) = 1c−t , ahol c ∈ C tetszoleges komplex konstans. Hatarozzuk meg a fuggoleges ten-
gelyrol indulo megoldasokat. Ezekre z(0) = Ki, tehat c = 1/Ki, ahol K ∈ R tetszolegesvalos konstans. Azaz z(t) = Ki
1−tKi = Ki−tK2
1+t2K2 . Igy, mivel x es y a z valos es kepzetes resze,
azert x(t) = −tK2
1+t2K2 es y(t) = K1+t2K2 . E ket egyenletbol a t valtozot eliminalhatjuk (az y
segıtsegevel kifejezzuk t-t, majd ezt az x kepletebe helyettesıtjuk), ezzel az x2 = (K − y)yosszefuggest kapjuk. Ez az x2 + (y − K)2 = K2 egyenlettel egyenerteku, ami egy olyankor egyenlete, amelynek kozeppontja a fuggoleges koordinatatengelyen van es athalad azorigon (kozeppontja a (0, K) pont, sugara K). Tehat a rendszernek az origo az egyen-sulyi pontja, az x tengely invarians, rajta jobbra haladnak a megoldasok, a tobbi palyakpedig olyan korok (valojaban homoklinikus palyak), amelyeknek kozeppontja a fuggolegeskoordinatatengelyen van es athaladnak az origon. A felso felsıkban ezen korokon pozitıviranyban haladnak a megoldasok, az also felsıkban pedig negatıv iranyban. A faziskepetaz 5.6. Abran lathatjuk. Megjegyezzuk, hogy amennyiben az x2 +(y−K)2−K2 = 0 kepletmar ismert, akkor derivalassal azt kapjuk, hogy ennek derivaltja 2x(x2 + (y−K)2−K2),tehat ha x2 + (y − K)2 − K2 = 0 fennall a trajektoria kezdopontjaban, akkor mindenpontjaban fennall, azaz ezen keplettel megadott korvonal invarians gorbe.
Az 5.6. Peldaban szereplo differencialegyenlet-rendszer faziskepenek meghatarozasakomplex valtozora valo transzformacioval.
Elso integral es Ljapunov-fuggveny keresese
A V : R2 → R fuggveny elso integralja az x = P (x, y), y = Q(x, y) rendszernek, haP∂1V +Q∂2V = 0. Az elso integral segıtsegevel egyszeruen megkaphatjuk a faziskepet,
79

hiszen annak szintvonalain fekszenek a rendszer palyai. Tekintsuk peldakent a Lotka–Volterra-rendszert:
x = x− xy, y = xy − y.
A ket egyenletet elosztva egymassal, es feltetelezve, hogy y megadhato x fuggvenye-kent (legalabbis bizonyos tartomanyokban), a kovetkezo differencialegyenletet kapjuk az
x 7→ y(x) fuggvenyre: dydx
= y(x−1)x(1−y)
. Ez szetvalaszthato valtozoju egyenlet, ezert konnyen
megoldhato. Az y-t tartalmazo tenyezoket a bal oldalra atvihetjuk: 1−yy
dydx
= x−1x
. In-
tegralas utan ln(|y|) − y = x − ln(|x|) + K, ahol K tetszoleges konstans. Tehat aV (x, y) = ln(|x|)−x+ln(|y|)−y fuggveny elso integral, melyrol most mar derivalassal ismeggyozodhetunk (ha esetleg az elobbi formalis levezetest nem tartjuk megbızhatonak).Ugyanis LfV (x, y) = (1/x− 1)x(1− y) + (1/y− 1)y(x− 1) = 0. Megjegyezzuk, hogy azelso integralt V (x, y) = F (x) +G(y) alakban keresve is eljuthatunk a fenti fuggvenyhez.Igazolhato, hogy az elso integral szintvonalai az elso sıknegyedben zart gorbek, ezert apozitıv koordinataju megoldasok periodikusak, amint az 5.5. abran lathato.
5.5. abra. A Lotka–Volterra-rendszer faziskepe.
Az elso integral kepletenek meghatarozasara nincs altalanos szabaly, azonban egyfontos specialis esetben, nevezetesen, amikor a rendszer Hamilton-tıpusu, az elso integralmegadhato.
Az x = P (x, y), y = Q(x, y) ketvaltozos rendszer Hamilton-rendszer, ha van olyanH : R2 → R differencialhato fuggveny, melyre P = ∂2H es Q = −∂1H. A primitıvfuggveny letezesere vonatkozo szukseges feltetel szerint H letezesenek szukseges feltetele
80

∂1P = −∂2Q, azaz ∂1P + ∂2Q = 0, vagyis a rendszer divergenciaja nulla. A rendszerJacobi matrixa
J =
(∂12H ∂22H−∂11H −∂21H.
)Ennek nyoma Tr(J) = 0, ıgy a linearizalas alapjan az egyensulyi pontok vagy nyereg,vagy centrum tıpusuak. Mivel Det(J) = Det(H ′′(x, y)), azert ha az egyensulyi pontbanDet(H ′′(x, y)) < 0, azaz H ′′(x, y) indefinit, akkor az nyereg. Ha az egyensulyi pontbanDet(H ′′(x, y)) > 0, azaz (x, y) szelsoerteke H-nak, akkor az a pont centrum, mivel aszelsoertek egy kornyezeteben a szintvonalak zart gorbek.
Pelda 5.7. Tekintsuk azx = 1− x2 − y2, y = 2xy
egyenletet. Mivel ∂1P (x, y) + ∂2Q(x, y) = −2x + 2x = 0, azert a rendszer Hamilton-tıpusu. A P fuggvenyt y szerint integralva a Hamilton-fuggveny H(x, y) = y − x2y −y3/3 +C(x) alaku, ahol C tetszoleges differencialhato fuggveny. A H fuggvenyt x szerintderivalva, a Q = −∂1H egyenlosegbol a C ′(x) = 0 osszefuggest kapjuk, tehat a C fuggvenyvalaszthato peldaul a konstans nulla fuggvenynek. Igy a Hamilton-fuggveny H(x, y) =y − x2y − y3/3. A szintvonalak abrazolasa elott celszeru meghatarozni az egyensulyipontokat, illetve megrajzolni a nullklınakat es nehany pontban az iranymezot. A masodikegyenletbol az egyensulyi pontokra x = 0 vagy y = 0. Ezeket behelyettesıtve az elsoegyenletbe y = ±1 vagy x = ±1. Igy az egyensulyi pontok (0, 1), (0,−1), (1, 0) es(−1, 0). Az egyensulyi pontok tıpusat Det(H ′′(x, y)) elojele hatarozza meg. EsetunkbenDet(H ′′(x, y)) = −4x2 + 4y2. Igy (1, 0) es (−1, 0) nyeregpontok, (0, 1) es (0,−1) pedigcentrum pontok. A H = 0 szinthalmaz ket reszbol all, egyreszt tartalmazza az x tengelyt,masreszt a ket nyeregpontot az also es felso felsıkban osszekoto 1 = x2 + y2/3 egyenletuellipszist. A negatıv H ertekekhez tartozo szintvonalak a ket centrum pontot az alsoes felso felsıkban megkerulo, az ellipszis belsejeben fekvo gorbek. A pozitıv H ertekekheztartozo szintvonalak az also es felso felsıkban fekvo, az ellipszist megkerulo, es vegtelenbenaz x tengelyhez hozzasimulo ket gorbebol allnak. A trajektoriak iranyat az iranymezobol,a masodik egyenlet alapjan kaphatjuk meg. Az elso es harmadik sıknegyedben, y > 0 miatta trajektoriak felfele mennek, mıg a masodik es negyedik negyedben y < 0 miatt lefele.Nehany pontbol indulo palyat numerikusan kiszamıtva, az 5.7. abran lathato faziskepetkapjuk.
Az 5.7. Peldaban szereplo Hamilton-fele differencialegyenlet-rendszer faziskepe.
A Hamilton-rendszerek fontos specialis esete az x + U ′(x) = 0 alaku, egy szabad-sagi foku mechanikai rendszer. A megfelelo elsorendu rendszer x = y, y = −U ′(x). Ezenrendszer elso integralja a V (x, y) = y2/2+U(x) fuggveny, ugyanis ennek rendszer szerintiderivaltja LfV (x, y) = −yU ′(x) + yU ′(x) = 0. Igy rendszer trajektoriai a V fuggvenyszintvonalain fekszenek. Tehat a faziskep elkeszıtesehez csak a V szintvonalait kell meg-hatarozni, majd ezeken x es y elojele alapjan a trajektoria iranyat kell megjelolni. A
81

V szintvonalainak felrajzolasahoz celszeru eloszor az U fuggveny grafikonjat megrajzolniaz (x, U) sıkban. Majd erre a sıkra merolegesen felveve az y tengelyt az (y, U) sıkkalparhuzamosan mozgatva egy y2/2 tıpusu parabolat, olyan modon, hogy csucsa az U(x)fuggveny grafikonjat fussa be, a V fuggveny feluletet kapjuk meg. Ezutan a szintvo-nalakat egyszeruen megkaphatjuk a feluletet vızszintes sıkokkal metszve. A rendszerJacobi-matrixa
J =
(0 1
−U ′′(x) 0.
)Ennek nyoma Tr(J) = 0, ıgy a linearizalas alapjan az egyensulyi pontok vagy nyereg,vagy centrum tıpusuak. Mivel Det(J) = U ′′(x), azert ha az egyensulyi pontban U ′′(x) <0, akkor az nyereg. Ha az egyensulyi pontban U ′′(x) > 0, akkor a pont minimuma a Velso integralnak, ıgy az centrum.
Pelda 5.8. Tekintsuk azx = y, y = x− x2
egyenletet. A rendszer egyensulyi pontjai (0, 0) es (1, 0). Az U fuggveny U(x) = x3/3−x2/2, ıgy a rendszer elso integralja V (x, y) = y2/2 + x3/3 − x2/2. Az U fuggvenynekmaximuma van a 0 pontban es minimuma az 1 pontban, ezert (0, 0) nyeregpont es (1, 0)centrum. Keszıtsuk el ezutan az U fuggveny grafikonjat, majd a fent leırt modszer alapjana V szintvonalait. A V = 0-hoz tartozo szintvonal tartalmazza az origot, es a jobbfelsıkban hurkot ır le. A hurok belsejeben talalhatok a negatıv V ertekekhez tartozo zartgorbek, az (1, 0) pont a V lokalis minimuma. Szinten negatıv V ertekekhez tartoznak a balfelsıkban fekvo, hiperbola agra emlekezteto gorbek. Tehat a V negatıv szintjeihez tartozo
82

szinthalmazok ket kulonallo gorbebol allnak. A pozitıv ertekekhez tartozo szintvonalakviszont osszefuggoek, ezek a hurkot megkerulo gorbek. A trajektoriak iranyat az elsodifferencialegyenletbol kaphatjuk meg legegyszerubben, ugyanis a felso felsıkban, ahol y >0 a trajektoriak jobbra mennek, hiszen ott x > 0, mıg az also felsıkban x < 0, ezert ott atrajektoriak balra mennek. A faziskepet az 5.8. abran lathatjuk.
Az 5.8. Peldaban szereplo differencialegyenlet-rendszer faziskepe.
Pelda 5.9. Tekintsuk azx = y, y = x− x2 + cy
egyenletet. A rendszer egyensulyi pontjai (0, 0) es (1, 0). Vegyuk eszre, hogy az egyenletaz 5.8. Peldaban szereplo differencialegyenlet-rendszer perturbaciojanak tekintheto, ezertszamıtsuk ki azon rendszer elso integraljanak Lie-derivaltjat ezen rendszer szerint. Egy-szeru szamolassal azt kapjuk, hogy V (x, y) = y2/2 +x3/3−x2/2 eseten LfV (x, y) = cy2,
melynek elojele megegyezik c elojelevel. Igy c < 0 eseten a V fuggveny erteke a meg-oldasok menten csokken. Igy a (0, 0) nyeregpontbol kiindulo egyik palya az (1, 0) stabilfokuszhoz tart. A faziskepet az 5.9. Abran lathatjuk. Ha c > 0, akkor a V fuggvenyerteke a megoldasok menten no. Igy a (0, 0) nyeregpontba befuto egyik palya az (1, 0)instabil fokuszbol indul ki. A faziskepet az 5.9. abran lathatjuk.
Az 5.9. Peldaban szereplo differencialegyenlet-rendszer faziskepe c < 0 eseten.Az 5.9. Peldaban szereplo differencialegyenlet-rendszer faziskepe c > 0 eseten.
83

A vektormezo szimmetriajanak felhasznalasa
A vektormezo szimmetriaja sok esetben segıtheti az iranymezobol kapott informacio fel-hasznalasat. Leggyakoribb pelda a nemlinearis centrum esete, melynek letezeset sem alinearizalasbol sem az iranymezobol nem lehet megallapıtani (hiszen csak annyit latunk,hogy a palyak az egyensulyi pont korul korbejarnak). Ilyen esetben elofordulhat, hogya palyak tengelyesen szimmetrikusak egy, az egyensulyi ponton athalado tengelyre. Ezt
84

a tenyt a megoldasok ismerete nelkul magukbol a differencialegyenletekbol be lehet bi-zonyıtani. Tekintsunk ehhez egy altalanos x(t) = f(x(t)) rendszert (nem kell feltetlenulketdimenziosnak lennie). Legyen T : Rn → Rn az a transzformacio, amely a palyakatonmagukba kepezi. Ha egy p ∈ Rn pontbol indulo palya pozitıv t ertekekhez tartozoreszet a T lekepezes a T (p) pontbol indulo palya negatıv t ertekekhez tartozo reszrekepezi, akkor fennall a
ϕ(−t, T (p)) = T (ϕ(t, p))
azonossag minden t eseten. Ezt t szerint derivalva −ϕ(−t, T (p)) = T ′(ϕ(t, p))ϕ(t, p), ezta t = 0 esetben alkalmazva
−f(T (p)) = T ′(p)f(p).
Ez utobbi ellenorzesehez pedig nem kell a megoldasok ismerete.Nezzuk meg a fenti keplet jelenteset ket fontos specialis, ketdimenzios esetben. Ne-
vezetesen, hogy hogyan allapıthato meg a differencialegyenletekbol, hogy a megoldasokvalamelyik koordinatatengelyre szimmetrikusak. A fuggoleges tengelyre valo tukrozes a
T (x, y) = (−x, y) lekepezes, melynek derivaltmatrixa T ′ =
(−1 00 1
). Igy a fenti keplet
alapjan, az x = P (x, y), y = Q(x, y) rendszer palyai a fuggoleges tengelyre szimmetriku-sak, ha −(P (−x, y), Q(−x, y)) = T ′(P (x, y), Q(x, y)), azaz
P (−x, y) = P (x, y), −Q(−x, y) = Q(x, y).
A vızszintes tengelyre valo tukrozes a T (x, y) = (x,−y) lekepezes, melynek derivaltmat-
rixa T ′ =
(1 00 −1
). Igy a fenti keplet alapjan, az x = P (x, y), y = Q(x, y) rendszer pa-
lyai a vızszintes tengelyre szimmetrikusak, ha−(P (x,−y), Q(x,−y)) = T ′(P (x, y), Q(x, y)),azaz
−P (x,−y) = P (x, y), Q(x,−y) = Q(x, y).
Pelda 5.10. Tekintsuk az
x = 1− x2 − y2, y = 2x
egyenletet. Hatarozzuk meg eloszor az egyensulyi pontokat. A masodik egyenletbol x = 0,majd az elsobol y = ±1. Igy az egyensulyi pontok (0, 1) es (0,−1). A rendszer Jacobi-matrixa
J =
(−2x −2y
2 0
).
A (0, 1) egyensulyi pontban J(0, 1) =
(0 −22 0
), melyre Tr(J(0, 1)) = 0, Det(J(0, 1)) =
4, Tr2(J(0, 1)) − 4Det(J(0, 1)) < 0, ıgy (0, 1) tıpusa a linearizalasbol nem dontheto el
(a sajatertekek tiszta kepzetesek). Az (0,−1) egyensulyi pontban J(0,−1) =
(0 22 0
),
85

melyre Tr(J(0,−1)) = 0, Det(J(0,−1)) = −4, ıgy (0,−1) nyereg. Az N1 nullavonalegyenlete x2 +y2 = 1, azaz ez a nullavonal origo kozepu kor, mely ket tartomanyra osztjaa fazissıkot. A kulso tartomanyban balra, a belsoben jobbra mozognak a trajektoriak. AzN2 nullavonal a fuggoleges koordinata tengely, mely ket tartomanyra osztja a fazissıkot.A baloldali reszen y < 0, tehat lefele mozognak a trajektoriak, a jobboldali reszen pedigy > 0, tehat felfele mozognak a trajektoriak. A ket nullavonal egyutt negy reszre osztjaa fazissıkot. Az abran mindegyikben egy-egy nyıl mutatja a trajektoria erintovektoranakiranyat. A nyeregpontbol kiindulo palyak kozul az egyik megkeruli a (0, 1) egyensulyipontot, a masik −∞-hez tart. A nyeregpontba befuto szeparatrixok kozul az egyik a (0, 1)pontot megkerulve erkezik a nyeregpontba, a masik −∞ felol jon. A palyak viselkedesenekpontos megallapıtasahoz vegyuk eszre, hogy a faziskep a fuggoleges tengelyre szimmetrikus,azaz a tengelyrol idoben elore es hatra indıtott megoldasok szimmetrikusan haladnak. Eztaz bizonyıtja, hogy P (−x, y) = P (x, y) es −Q(−x, y) = Q(x, y) fennall. Eszerint a(0, 1) egyensulyi pontot zart palyak veszik korul, tehat ez centrum, es a nyeregbol felfelekimeno es bejovo palya egybeesik, egy homoklinikus palyat formalva. A homoklinikuspalyat megkerulo palyak is a fuggoleges tengelyre szimmetrikusak. Nehany pontbol indulopalyat numerikusan kiszamıtva, az 5.10. abran lathato faziskepet kapjuk.
Az 5.10. Peldaban szereplo differencialegyenlet-rendszer faziskepe.
A fenti peldak alapjan lathatjuk, hogy ketdimenzios rendszerek eseteben az egyespontok koruli lokalis faziskep ismereteben nem feltetlenul hatarozhato meg a globalis fa-ziskep, ugyanis lehetnek globalis alakzatok, melyeket a lokalis faziskepek nem hataroznakmeg. Ket dimenzioban a lehetseges globalis alakzatok a kovetkezok:
86

• periodikus palya
• homoklinikus palya
• heteroklinikus palya.
A kovetkezo szakaszban ezek kozul a periodikus palyakkal foglalkozunk.
5.2. Periodikus megoldasok
Tekintsuk azx(t) = f(x(t))
differencialegyenlet-rendszert, melyben f : Rn → Rn folytonosan differencialhato fugg-veny. Jelolje a p pontbol indulo megoldast ϕ(t, p).
Definıcio 5.1.. A p nem egyensulyi pontot periodikus pontnak nevezzuk, ha letezik T >0, melyre ϕ(T, p) = p. A p pont palyajat periodikus palyanak nevezzuk, a legkisebb ilyenT erteket a palya periodusanak hıvjuk.
A periodikus palyakkal kapcsolatban az alabbi ket alapveto kerdessel fogunk foglal-kozni.
1. Hogyan lehet igazolni a periodikus palya letezeset vagy nem letezeset?
2. Milyen a faziskep a periodikus palya egy kornyezeteben?
Megjegyezzuk, hogy egyensulyi pontokkal kapcsolatban ezeket a kerdeseket mar vizs-galtuk. Az elso kerdes megvalaszolasahoz az f(p) = 0 algebrai egyenletrendszert kellmegoldani, illetve a megoldas letezeset vizsgalni. A masodik kerdest pedig az egyensulyipontban felırt derivalt matrix segıtsegevel lehet eldonteni. A periodikus megoldasokravonatkozo analog problema a kerdes globalis volta miatt joval nehezebb, az ismert alap-veto eredmenyeket az alabbi ket szakaszban mutatjuk be, valamint fontos megoldatlanproblemakat is emlıtunk.
5.2.1. Periodikus megoldasok letezese
Periodikus megoldasok letezeset ketdimenzios rendszerekben a Poincare–Bendixson-tetelsegıtsegevel lehet igazolni. A tetel megfogalmazasa elott az alapveto otletet egy motivalopeldaval illusztraljuk.
87

Pelda 5.11. Tekintsuk az
x = x− y − x3
y = x+ y − y3
rendszert. Az y = x − x3 es x = y3 − y nullavonalakat abrazolva lathato, hogy az origokorul korbejarnak a palyak, azonban azt nem lehet egyszeruen eldonteni, hogy az origohozkozelednek, vagy tavolodnak tole, lasd az 5.11. abrat.
Az 5.11. Peldaban szereplo differencialegyenlet-rendszer nullavonalai es az irany-mezo.
Ennek vizsgalatara vezessuk be a V (x, y) := x2 + y2 Ljapunov-fuggvenyt. Egy tet-szoleges (x(t), y(t)) megoldast valasztva, legyen V ∗(t) = x2(t) + y2(t). Ekkor az x esy fuggvenyre vonatkozo differencialegyenleteket felhasznalva V ∗(t) = 2(x2(t) + y2(t) −x4(t) − y4(t)). Ezen kifejezes elojelet kell meghataroznunk a palyak viselkedesenek meg-hatarozasahoz. Az alabbi allıtasok egyszeruen igazolhatok. Ha x2 + y2 < 1, akkorx2+y2−x4−y4 > 0, ha pedig x2+y2 > 2, akkor x2+y2−x4−y4 < 0. Ez azt jelenti, hogy azegyseg sugaru korben a palyak tavolodnak az origotol, a
√2 sugaru koron kıvul viszont ko-
zelednek hozza. Az 1 es√
2 sugaru korok altal meghatarozott gyuru alaku tartomany tehatpozitıvan invarians, azaz nem hagyhatjak el a palyak. Tekintsuk a vızszintes koordinata-tengely 1 es
√2 kozotti szakaszat, es ertelmezzuk ezen a P : [1,
√2]→ [1,
√2] Poincare-
lekepezest a kovetkezokeppen. Egy tetszoleges q ∈ [1,√
2] eseten legyen P (q) ∈ [1,√
2] aza pont, ahova a q pontbol indulo palya eloszor visszaerkezik, lasd a sematikus 5.6. abrat.
Igazolhato, hogy a Poincare-lekepezes folytonos, tehat a lekepezes az [1,√
2] inter-vallumot onmagaba kepezi folytonosan, ezert van fixpontja, azaz van olyan p ∈ [1,
√2],
88

5.6. abra. A Poincare-lekepezes es egy p pontbol indulo periodikus palya.
melyre P (p) = p. Ez a pont tehat periodikus pontja a rendszernek, hiszen a belole indulopalya onmagaba ter vissza.
A peldaban alkalmazott modszer altalanosıtasaval igazolhato az alabbi tetel.
Tetel 5.2. (Poincare–Bendixson-tetel gyenge alakja). Legyen f : R2 → R2 foly-tonosan differencialhato fuggveny, es tekintsuk az x(t) = f(x(t)) ketdimenzios rendszert.Ha K ⊂ R2 pozitıvan invarians, kompakt halmaz, melyben nincs egyensulyi pont, akkorK-ban van a rendszernek periodikus palyaja. A fenti tulajdonsagu K halmazt Bendixson-fele zsaknak nevezik.
A tetel bizonyıtasat itt nem kozoljuk, megtalalhato a [26] konyv 8.3.3. szakaszaban.Megjegyezzuk, hogy a fenti peldaban az 1 es
√2 sugaru korok altal meghatarozott gyuru
alaku tartomany a Bendixson-fele zsak.A Poincare–Bendixson-tetel elegseges feltetelt ad ketdimenzios rendszerekben perio-
dikus megoldas letezesere. A tetel alkalmazhatosaga a Bendixson-fele zsak megkonstru-alhatosagan alapszik, azonban ez sok esetben tul nagy kihıvasnak tunik. Ezert fontos az,hogy a periodikus palya nem letezesere is legyen feltetelunk, hiszen onmagaban az, hogynem sikerult Bendixson-fele zsakot talalni, nem jelenti azt, hogy nincs is periodikus pa-lya. Periodikus palya nem letezesere vonatkozo feltetelek a Bendixson-kriterium, illetvea Bendixson–Dulac-kriterium. Ezeket fogjuk a tovabbiakban ismertetni.
Mindket kriterium a Stokes-tetel alabbi ketdimenzios valtozatanak segıtsegevel iga-zolhato.
89

Lemma 5.3.. Legyen D ⊂ R2 egyszeresen osszefuggo nyılt halmaz, es G : D → R2
differencialhato fuggveny. Ekkor∫D
(∂1G1 + ∂2G2) =
∫∂D
(−G2, G1).
Ezen lemma segıtsegevel igazoljuk eloszor a Bendixson-kriteriumot.
Tetel 5.4. (Bendixson-kriterium). Ha H ⊂ R2 olyan egyszeresen osszefuggo nyılthalmaz, amelyen a divf = ∂1f1 + ∂2f2 fuggveny allando elojelu, es legfeljebb egy gorbepontjaiban tunik el, akkor az x(t) = f(x(t)) ketdimenzios rendszernek nincs teljesen a Hhalmazban halado periodikus palyaja.
Bizonyıtas. Tegyuk fel, hogy van teljesen a H halmazban halado periodikus megoldas,legyen egy ilyen Γ. Jelolje ennek belsejet D. Felırva a Stokes-tetelt az f fuggvenyre esa D tartomanyra, ellentmondast kapunk, mivel a baloldal adott elojelu (a divergenciaelojelenek megfeleloen), viszont a jobboldal nulla, hiszen a (−f2, f1) vektor a periodikusmegoldas pontjaiban meroleges a ∂D gorbe, azaz a periodikus megoldas erintojere. Aperiodikus megoldast γ(t)-vel jelolve, formalisan a jobboldali kifejezes∫
Γ
(−f2, f1) =
∫ T
0
(− f2(γ(t)) · γ1(t) + f1(γ(t)) · γ2(t)
)dt
=
∫ T
0
(− γ2γ1 + γ1γ2
)dt = 0.
Ezt a tetelt altalanosıtja a Bendixson–Dulac-kriterium.
Tetel 5.5. (Bendixson–Dulac-kriterium). Legyen H ⊂ R2 egyszeresen osszefuggonyılt halmaz, es legyen B : H → R olyan differencialhato fuggveny, melyre a div(Bf)fuggveny allando elojelu, es legfeljebb egy gorbe pontjaiban tunik el. Ekkor az x(t) =f(x(t)) rendszernek nincs teljesen a H halmazban halado periodikus palyaja.
Bizonyıtas. Az elozo bizonyıtas menetet kovetjuk, azonban most az f fuggveny helyetta Bf fuggvenyre alkalmazzuk a gondolatmenetet.
A nemletezesi tetelek alkalmazasara mutatunk nehany peldat.
Pelda 5.12. Tekintsuk az
x = x− xy2 + y3
y = 3y − x2y + x3
rendszert. Ekkor ∂1f1(x, y) + ∂2f2(x, y) = 1 − y2 + 3 − x2 = 4 − (x2 + y2), amelya 2 sugaru koron belul szigoruan pozitıv, ıgy ebben a korben nem lehet a rendszernekperiodikus palyaja.
90

Pelda 5.13. Azx = x+ y2 + x3 y = −x+ y + x2y
rendszernek a Bendixson-kriterium szerint nincs periodikus megoldasa. Ugyanis divf(x, y) =2 + 4x2 > 0 a sık minden pontjaban.
Az eddigi tetelek es peldak ketdimenzios rendszerekre vonatkoztak, topologiai okokboltobb dimenzios esetben ilyen altalanos tetelek nincsenek, az ezzel kapcsolatos eredmenyektargyalasa meghaladja ezen jegyzet kereteit. A kerdes melyseget es nehezseget illusztraljaaz is, hogy Hilbert ezzel kapcsolatos, ugynevezett 16. problemaja tobb mint 100 evemegoldatlan.Hilbert 16. problemaja
Legyenek P es Q n-edfoku polinomok. Legfeljebb hany hatarciklus lehet az
x = P (x, y)
y = Q(x, y)
rendszerben?Nyilvanvalo, hogy n = 1 eseten, amikor a rendszer linearis, nem lehet hatarciklus
(periodikus megoldasok lehetnek, peldaul, amikor a rendszer egyensulyi pontja centrum).Az n = 2 esetben a hatarciklusok maximalis szamara a sejtes 4, erre Shi, Chen es Wangadtak peldat 1979-ben, azonban eddig nem sikerult igazolni, hogy tobb hatarciklus nemlehet. Az eredmenyekrol szamos attekinto cikk mellett Perko konyveben [19] olvashatoosszefoglalas.
5.2.2. Lokalis vizsgalat periodikus megoldasok korul
Ebben a szakaszban azt vizsgaljuk, hogy periodikus palyak korul hogyan jellemezhetoa lokalis faziskep. Tanulmanyozni fogjuk periodikus megoldasok stablitasat, illetve sta-bil, instabil es centralis altereit. A vizsgalat legfontosabb eszkoze a Poincare-lekepezes,amellyel a kerdest diszkret dinamikai rendszerek fixpontjanak lokalis vizsgalatara lehetvisszavezetni.
Legyen M ⊂ Rn egy tartomany es legyen ϕ : R×M →M dinamikai rendszer. Legyenp ∈M periodikus pont T periodussal, azaz ϕ(T, p) = p. Vezessuk be a γ(t) := ϕ(t, p) esΓ := γ(t) : t ∈ [0, T ] jeloleseket.
Definıcio 5.6.. Legyen L ⊂ Rn egy n − 1 dimenzios hipersık ν normalvektorral. EgyΣ ⊂ L osszefuggo halmazt transzverzalis metszetnek nevezunk, ha 〈ν, ∂tϕ(0, q)〉 6= 0minden q ∈ Σ pontra.
Legyen Σ egy p pontot belsejeben tartalmazo transzverzalis metszet. Az implicit-fuggveny tetel egyszeru alkalmazasaval igazolhato az alabbi.
91

Allıtas 5.1. (Poincare-lekepezes letezese) A p pontnak van olyan U ⊂ Σ kornyezete,es letezik olyan Θ : U → R folytonosan differencialhato fuggveny, melyre Θ(p) = T esϕ(Θ(q), q) ∈ Σ, minden q ∈ U pontra.
Definıcio 5.7.. A P : U → Σ, P (q) = ϕ(Θ(q), q) fuggvenyt a (Σ transzverzalis metszet-hez tartozo) Poincare-lekepezesnek nevezik.
A Poincare-lekepezes fugg a p pont es a Σ transzverzalis metszet valasztasatol. Akovetkezo allıtas szerint a kulonbozo Poincare-lekepezesek koordinata-transzformaciovalegymasba vihetok.
Allıtas 5.2. Legyenek p1, p2 ∈ Γ, Σ1,Σ2 ezeket tartalmazo transzverzalis metszetek, Ui ⊂Σi (i = 1, 2) nyılt halmazok, melyeken ertelmezve vannak a Pi : Ui → Σi (i = 1, 2)Poincare-lekepezesek. Ekkor van a p1 pontnak olyan V ⊂ U1 kornyezete, es S : V → U2
differencialhato fuggveny, melyre P2(S(p)) = S((P1(p)) minden p ∈ V eseten.
Kovetkezmeny 5.8.. A P ′1(p1) es P ′2(p2) matrixok sajatertekei megegyeznek.
Ha P (U) ⊂ U , akkor a P Poincare-lekepezes az U halmazon egy ψ : N × U → Udiszkret dinamikai rendszert (pontosabban un. szemidinamikai rendszert) hataroz meg akovetkezokeppen: ψ(n, q) = P n(q), ahol P n = P P . . .P az n tagu kompozıciot jeloli.(Azert nevezik szemidinamikai rendszernek, mert negatıv n ertekekre nincs ertelmezve.)Mivel P (p) = p, azert a p pont a ψ dinamikai rendszernek egyensulyi pontja. Latnifogjuk, hogy ennek stabilitasa hatarozza meg a Γ palya stabilitasat, ezert eloszor emle-keztetunk diszkret dinamikai rendszerek fixpontjanak stabilitasaval kapcsolatos alapvetofogalmakra es a linearizalassal kapcsolatos eredmenyekre. (Ezeket a 8. fejezetben reszle-tesen targyalni fogjuk.)
Legyen G ⊂ Rk nyılt halmaz, g : G → G diffeomorfizmus (olyan differencialhatofuggveny, melynek letezik inverze, es az is differencialhato). Ez a fuggveny a G halma-zon meghataroz egy ψ : Z × G → G diszkret dinamikai rendszert a kovetkezokeppen:ψ(n, q) = gn(q), ahol gn = g g . . .g az n tagu kompozıciot jeloli, ha n ∈ N. Ha n < 0,akkor legyen gn = g−1 g−1 . . . g−1 −n tagu kompozıcio. Konnyen lathato, hogy ψegy dinamikai rendszer. A rovidseg kedveert helyette a gn jelolest fogjuk hasznalni.
Definıcio 5.9.. A p ∈ G pontot a ψ dinamikai rendszer egyensulyi pontjanak, vagyfixpontjanak nevezzuk, ha g(p) = p (azaz ψ(n, p) = p, minden n ∈ Z eseten).
Definıcio 5.10.. A p fixpontot stabilisnak nevezzuk, ha minden ε > 0 szamhoz van olyanδ > 0, hogy |q − p| < δ es n ∈ N eseten |gn(q) − p| < ε. A p fixpontot instabilisnaknevezzuk, ha nem stabilis.
A p fixpontot aszimptotikusan stabilisnak nevezzuk, ha stabilis, es |q − p| < δ esetenlimn→∞ g
n(q) = p.
92

A fixpont stabilitasa a folytonos dinamikai rendszerhez hasonloan linearizalassal dont-heto el.
Tetel 5.11.. (Fixpont stabilitasa) Ha a g′(p) matrix minden λ sajatertekere |λ| < 1,akkor a p fixpont aszimptotikusan stabilis.
Terjunk most vissza a P : U → Σ Poincare-lekepezes vizsgalatara. Megmutatjuk,hogy a Poincare-lekepezes fixpontjanak stabilitasa hogyan hatarozza meg a Γ palya sta-bilitasat. Konnyen lathato, hogy egy periodikus megoldas nem lehet aszimptotikusanstabilis, megis mint halmazhoz tarthatnak hozza egy kornyezetebol a megoldasok (lehetω-hatarhalmaz, vagy attraktor). Ezert a periodikus megoldas stabilitasanak leırasarabevezetjuk az orbitalis stabilitas fogalmat. Hasznalni fogjuk a pontok Γ palyatol valotavolsagara az alabbi jelolest:
d(q,Γ) = inf|q − γ(t)| : t ∈ [0, T ].
Definıcio 5.12.. A γ periodikus megoldas orbitalisan stabilis, ha minden ε > 0 szamhozvan olyan δ > 0, melyre d(q,Γ) < δ es t ≥ 0 eseten d(ϕ(t, q),Γ) < ε.
A γ periodikus megoldas orbitalisan aszimptotikusan stabilis, ha orbitalisan stabilises
limt→∞
d(ϕ(t, q),Γ) = 0.
A Γ palya hatarciklus, ha van olyan q /∈ Γ pont, melyre Γ ⊂ ω(q), vagy Γ ⊂ α(q).A Γ palya stabil hatarciklus, ha γ orbitalisan aszimptotikusan stabilis.
Legyen Σ egy p pontot tartalmazo transzverzalis metszet, U ⊂ Σ a p pont kornyezete,P : U → Σ a Poincare-lekepezes.
Tetel 5.13.. Ha p (aszimptotikusan) stabilis fixpontja a P Poincare-lekepezesnek, akkorγ orbitalisan (aszimptotikusan) stabilis.
A tetel bizonyıtasanak alapgondolata megtalalhato [26] konyvben. A periodikus palyastabilitasat tehat a Poincare-lekepezes derivaltjanak sajatertekei hatarozzak meg.
Definıcio 5.14.. A P ′(p) ((n−1)× (n−1)-es) matrix sajatertekeit a Γ periodikus palyakarakterisztikus multiplikatorainak nevezik.
Az 5.8.. Kovetkezmeny szerint a karakterisztikus multiplikatorok nem fuggenek aPoincare-lekepezes valasztasatol. A 5.11. Tetel szerint pedig jellemzik a fixpont stabili-tasat. Ezzel tehat a kovetkezo tetelt kapjuk.
Tetel 5.15. (Andronov-Witt). Ha a Γ periodikus palya karakterisztikus multiplikato-rainak abszoluterteke 1-nel kisebb, akkor a Γ palya stabil hatarciklus.
93

Ketdimenzios rendszerek eseteben az egyetlen karakterisztikus multiplikator P ′(p).Igazolhato (lasd Perko konyveben [19] a 3.4. Fejezetben a 2. Tetelt), hogy ez a kovetke-zokeppen adhato meg
P ′(p) = exp
(∫ T
0
divf(γ(t))
),
ahol divf = ∂1f1 + ∂2f2 az f divergenciajat jeloli. Tehat, ha a divergencia a periodikuspalya menten vegig negatıv, akkor a periodikus palya stabil hatarciklus, ha pedig adivergencia a palya menten vegig pozitıv, akkor igazolhato, hogy a periodikus palyainstabil hatarciklus.
Ketdimenzios rendszerek eseteben egy karakterisztikus multiplikatora van a periodi-kus palyanak, ıgy a palyahoz csak egy invarians alter tartozik. Magasabb dimenziobanmegtortenhet, hogy a periodikus palya egy iranybol vonz, mas iranybol pedig taszıt,tehat nyereg jellegu. Ilyen esetekben a periodikus palya koruli lokalis viselkedest a sta-bil, instabil es centralis sokasag dimenziojaval lehet jellemezni. Az invarians sokasagokbevezeteset az alabbi peldaval szemleltetjuk.
Pelda 5.14. Tekintsuk az alabbi haromvaltozos rendszert.
x = −y + x(1− x2 − y2)
y = x+ y(1− x2 − y2)
z = z
Konnyen lathato, hogy az (x, y) vızszintes sık, illetve a z tengely invarians, azaz ezeketnem hagyjak el a palyak. A vızszintes sıkban fekvo, origo kozepu egyseg sugaru kor egyperiodikus megoldas palyaja. A vızszintes sıkban fekvo palyak ehhez a hatarciklushoz ko-zelıtenek. A hatarciklust tartalmazo fuggoleges hengerfelulet szinten invarians, az ebbenhalado palyak viszont tavolodnak a hatarciklustol, hiszen pozitıv z eseten z erteke novek-szik, a negatıv oldalon pedig csokken. A hatarciklus stabil sokasaga tehat a vızszintes sık,instabil sokasaga pedig a fuggoleges hengerfelulet, ezt az 5.14 abran szemleltetjuk.
Invarians sokasagok az 5.14. Peldaban szereplo differencialegyenlet-rendszerben.
Terjunk ra ezutan a periodikus palya stabil, instabil es centralis sokasaganak defini-alasara.
Legyen tehat M ⊂ Rn egy tartomany es legyen ϕ : R×M →M dinamikai rendszer.Legyen p ∈ M periodikus pont T periodussal, azaz ϕ(T, p) = p. Hasznaljuk ismet aγ(t) := ϕ(t, p) es Γ := γ(t) : t ∈ [0, T ] jeloleseket. Legyenek a Γ periodikus palyakarakterisztikus multiplikatorai µ1, µ2, . . . , µn−1.
Tetel 5.16. (Stabil es instabil sokasag tetel). Tegyuk fel, hogy a Γ periodikus palyakarakterisztikus multiplikatorai kozul k olyan van, melynek abszoluterteke 1-nel kisebb,es n− 1− k olyan, melynek abszoluterteke 1-nel nagyobb. Ekkor valamely δ > 0 esetenlegyen W loc
s (Γ) azon q ∈ Rn pontok halmaza melyekre
94

1. d(ϕ(t, q),Γ)→ 0, amint t→∞,
2. d(ϕ(t, q),Γ) < δ, ha t ≥ 0.
Valamint legyen W locu (Γ) azon q ∈ Rn pontok halmaza melyekre
1. d(ϕ(t, q),Γ)→ 0, amint t→ −∞,
2. d(ϕ(t, q),Γ) < δ, ha t ≤ 0.
Ekkor letezik olyan δ > 0, melyre W locs (Γ) egy k + 1 dimenzios pozitıvan invarians diffe-
rencialhato sokasag, es W locu (Γ) egy n−k dimenzios negatıvan invarians differencialhato
sokasag, melyeket a Γ periodikus palya lokalis stabil, illetve instabil sokasagoknak neve-zunk. Ezek a Γ gorbe pontjaiban transzverzalisan metszik egymast.
A globalis stabil es instabil sokasagokat az egyensulyi pont esetehez hasonloan aW locs (Γ) es W loc
u (Γ) lokalis sokasagok segıtsegevel definialhatjuk. A stabil sokasagot ugydefinialjuk, hogy a belole indulo trajektoriak az origohoz tartsanak. Mivel az origohoztarto palyak az origo kozeleben a lokalis stabil sokasagban haladnak, azert a globalisstabil sokasagot celszeru a kovetkezokeppen definialni.
Ws(Γ) :=⋃t≤0
ϕ(t,W locs (Γ)).
Az instabil sokasagot ugy hatarozzuk meg, hogy a belole indulo palyak t → −∞ ese-ten tartanak az origohoz. Mivel az ilyen palyak az origo kozeleben a lokalis instabil
95

sokasagban haladnak, azert az instabil sokasagok a kovetkezokeppen definialjuk.
Wu(Γ) :=⋃t≥0
ϕ(t,W locu (Γ)).
Ezen sokasagok mellett, ha vannak 1 abszoluterteku karakterisztikus multiplikatorok,akkor letezik a Γ palyanak centralis sokasaga is, melyet Wc(Γ) jelol. Ennek dimenziojamegegyezik az 1 abszoluterteku karakterisztikus multiplikatorokok szamaval.
Pelda 5.15. Tekintsuk az alabbi haromvaltozos rendszert.
x = −yy = x
z = −z
Konnyen lathato, hogy az (x, y) vızszintes sık, illetve a z tengely invarians, azaz ezeketnem hagyjak el a palyak. A vızszintes sıkban fekvo, origo kozepu korok periodikus meg-oldasok palyai. Tekintsuk az egyseg sugaru kort, mint periodikus palyat. Ennek centralissokasaga a vızszintes sık. A kort tartalmazo fuggoleges hengerfelulet szinten invarians, azebben halado palyak viszont kozelednek ehhez a palyahoz, hiszen pozitıv z eseten z ertekecsokken, a negatıv oldalon pedig novekszik. Az egyseg sugaru kor centralis sokasaga tehata vızszintes sık, stabil sokasaga pedig a fuggoleges hengerfelulet, melyet az 5.15. abramutat.
Invarians sokasagok az 5.15. Peldaban szereplo differencialegyenlet-rendszerben.
96

5.3. Indexelmelet alkalmazasa ketdimenzios rendsze-
rekre
Ketdimenzios rendszerek globalis vizsgalatanak egyik fontos eszkoze a vektormezo indexe.Az index topologiai fogalom, amely magasabb dimenzios rendszerekre is ertelmezheto,mi itt azonban csak a ketdimenzios esettel foglalkozunk. Tekintsuk az
x = P (x, y)
y = Q(x, y)
rendszert, es vegyunk egy γ : [a, b] → R2 folytonos, egyszeru zart gorbet. A γ gorbeindexe, ind(γ), azt adja meg, hogy a (P (γ(s)), Q(γ(s))) vektor hanyszor fordul korbe,mialatt az s befutja az [a, b] intervallumot. Igy termeszetesen ind(γ) mindig egesz szam.Egyszeruen lathato, hogy peldaul egy (stabil vagy instabil) csomopontot megkerulo gorbeeseteben ind(γ) = 1, mıg egy nyeregpontot megkerulo gorbe eseteben ind(γ) = −1.Ezeket formalisan is hamarosan levezetjuk, melyhez szukseg van az index keplettel valodefinialasara.
Jelolje Θ(x, y) az (x, y) pontban a (P (x, y), Q(x, y)) vektor szoget, valamint egy adottγ : [a, b]→ R2 gorbe eseten legyen Θ∗(s) = Θ(γ(s)) minden s ∈ [a, b] eseten. Ekkor
tgΘ∗(s) =Q(γ(s))
P (γ(s)).
Derivaljuk ezt s szerint, ekkor
1
cos2 Θ∗(s)· Θ∗(s) =
(∂1Q(γ(s)) · γ1(s) + ∂2Q(γ(s)) · γ2(s)
)P (γ(s))
P 2(γ(s))−
−
(∂1P (γ(s)) · γ1(s) + ∂2P (γ(s)) · γ2(s)
)Q(γ(s))
P 2(γ(s))
Felhasznalva, hogy
1
cos2 Θ∗= tg2Θ∗ + 1 =
Q2
P 2+ 1 =
Q2 + P 2
P 2
kifejezhetjuk a Θ∗ derivaltat.
Θ∗(s) =P (∂1Qγ1 + ∂2Qγ2)−Q(∂1P γ1 + ∂2P γ2)
P 2 +Q2
97

A (P (γ(s)), Q(γ(s))) vektor elfordulasanak nagysagat az
1
2π
∫ b
a
Θ∗(s)ds
integral adja, ezert a gorbe indexet a kovetkezokeppen definialjuk.
Definıcio 5.17.. Legyen γ : [a, b]→ R2 folytonos, egyszeru zart gorbe, amely nem haladat egyensulyi ponton. Ekkor a γ gorbe indexe az x = P (x, y) y = Q(x, y) rendszerrevonatkozoan
ind(γ) =1
2π
∫ b
a
P (∂1Qγ1 + ∂2Qγ2)−Q(∂1P γ1 + ∂2P γ2)
P 2 +Q2.
Pelda 5.16. Szamıtsuk ki egy instabil csomopontot megkerulo gorbe indexet. Az
x = x
y = y
rendszernek az origo csomo tıpusu egyensulyi pontja. Legyen γ(t) = (cos t, sin t), t ∈[0, 2π] az origo kozepu egyseg sugaru kor. Ekkor a gorbe pontjaiban a vektormezo sugar-iranyban kifele mutat, amint azt a http: // www. cs. elte. hu/ ~simonp/ DinRJegyz
honlap 4.20-as animacioja mutatja. Igy a vektor 2π szoget fordul, mialatt a gorben kor-bemegyunk, azaz a gorbe indexe 1. Szamıtsuk ki ezt a formalis definıcio alapjan is. Ebbenaz esetben
P (x, y) = x∂1P = 1∂2P = 0
Q(x, y) = y∂1Q = 0∂2Q = 1
valamint γ1 = − sin t, γ2 = cos t. Igy a definıcio szerint
ind(γ) =1
2π
∫ 2π
0
cos t(cos t)− sin t(− sin t)
cos2 t+ sin2 tdt = 1.
Pelda 5.17. Szamıtsuk ki egy stabil csomopontot megkerulo gorbe indexet. Az
x = −xy = −y
rendszernek az origo csomo tıpusu egyensulyi pontja. Legyen γ(t) = (cos t, sin t), t ∈[0, 2π] az origo kozepu egyseg sugaru kor. Ekkor a gorbe pontjaiban a vektormezo su-gariranyban befele mutat, amint amint azt a http: // www. cs. elte. hu/ ~simonp/
98

DinRJegyz honlap 4.21-es animacioja mutatja. Igy a vektor 2π szoget fordul, mialatta gorben korbemegyunk, azaz a gorbe indexe 1. Szamıtsuk ki ezt a formalis definıcioalapjan is. Ebben az esetben
P (x, y) = −x∂1P = −1∂2P = 0
Q(x, y) = −y∂1Q = 0∂2Q = −1
valamint γ1 = − sin t, γ2 = cos t. Igy a definıcio szerint
ind(γ) =1
2π
∫ 2π
0
− cos t(− cos t) + sin t(sin t)
cos2 t+ sin2 tdt = 1.
Pelda 5.18. Szamıtsuk ki egy nyeregpontot megkerulo gorbe indexet. Az
x = x
y = −y
rendszernek az origo nyereg tıpusu egyensulyi pontja. Legyen γ(t) = (cos t, sin t), t ∈[0, 2π] az origo kozepu egyseg sugaru kor. Ekkor a gorbe pontjaiban a vektormezo iranyata http: // www. cs. elte. hu/ ~simonp/ DinRJegyz honlap 4.22-es animacioja mutatja.Igy a vektor −2π szoget fordul, mialatt a gorben korbemegyunk, azaz a gorbe indexe -1.Szamıtsuk ki ezt a formalis definıcio alapjan is. Ebben az esetben
P (x, y) = x∂1P = 1∂2P = 0
Q(x, y) = −y∂1Q = 0∂2Q = −1
valamint γ1 = − sin t, γ2 = cos t. Igy a definıcio szerint
ind(γ) =1
2π
∫ 2π
0
cos t(− cos t) + sin t(− sin t)
cos2 t+ sin2 tdt = −1.
Az index kiszamıtasanak, illetve alkalmazasanak szempontjabol egyarant fontos azalabbi allıtas, melyet formalisan nem igazolunk, szemleletesen azonban vilagos a definıcioalapjan.
Allıtas 5.3. Barmely γ gorbe es (P,Q) vektormezo eseten fennallnak az alabbiak.
1. A gorbe indexe ind(γ) folytonosan fugg a γ gorbetol, amıg az nem megy at egyen-sulyi ponton.
2. A gorbe indexe ind(γ) folytonosan fugg a P es Q fuggvenytol, felteve, hogy a gorbenem megy at egyensulyi ponton.
Mivel az index egesz szam, azert a folytonos fuggesbol kovetkezik az alabbi.
99

Kovetkezmeny 5.18.. Barmely γ gorbe es (P,Q) vektormezo eseten ind(γ) allando, haa γ gorbet, vagy a P es Q fuggvenyt ugy valtoztatjuk, hogy kozben a gorbe nem megy ategyensulyi ponton.
Ezen kovetkezmenyt felhasznalva igazolhato nehany globalis jellegu allıtas a faziskep-pel kapcsolatban.
Allıtas 5.4. Ha a γ gorbe belsejeben nincs egyensulyi pont, akkor ind(γ) = 0.
Bizonyıtas. Ha a γ gorbe belsejeben nincs egyensulyi pont, akkor a gorbe folytonosanosszehuzhato egy pontra, ugy, hogy kozben a gorbe nem megy at egyensulyi ponton.Az 5.7. Abra alapjan egyszeruen lathato, hogy, amikor γ mar elegendoen kicsire vanosszehuzva, akkor vegighaladva rajta a vektormezo korbefordulasa 0, azaz a gorbe indexe0. Mivel az index az osszehuzas soran nem valtozik, azert az eredeti γ gorbe indexe is 0.
5.7. abra. A gorbe indexe nulla, ha belsejeben nem tartalmaz egyensulyi pontot.
A fenti kovetkezmeny lehetove teszi az egyensulyi pont indexenek definialasat.
Definıcio 5.19.. Legyen (x0, y0) izolalt egyensulyi pontja az x = P (x, y) y = Q(x, y)rendszernek. Ekkor barmely az egyensulyi pontot korulvevo, de mas egyensulyi pontotnem tartalmazo gorbe indexe ugyanannyi. Az egyensulyi pont indexe ind(x0, y0), legyenegy ilyen gorbe indexe.
A fenti peldak alapjan az egyensulyi pontok indexere az alabbit kapjuk.
100

Allıtas 5.5. A nyeregpont indexe −1, a csomo es fokusz indexe 1.
Szinten a γ gorbe folytonos valtoztatasaval igazolhato az alabbi.
Allıtas 5.6. Legyenek a γ gorbe belsejeben levo egyensulyi pontok (xi, yi), i = 1, 2, . . . k.Ekkor a gorbe indexe egyenlo a belsejeben fekvo egyensulyi pontok indexeinek osszegevel,azaz
ind(γ) =k∑i=1
ind(xi, yi).
Az 5.8. Abra alapjan lathatjuk, hogy amennyiben γ egy periodikus megoldas palyaja,akkor rajta vegighaladva a vektor egyet fordul korbe, azaz fennall az alabbi.
5.8. abra. Periodikus palya indexenek kiszamıtasa.
Allıtas 5.7. Ha γ egy periodikus megoldas palyaja, akkor ind(γ) = 1.
Ebbol es a megelozo allıtasbol azonnal kovetkezik az alabbi.
Kovetkezmeny 5.20.. Ha γ periodikus megoldas, akkor a belsejeben van egyensulyipont. Sot a benne fekvo egyensulyi pontok indexenek osszege 1.
Megjegyezzuk, hogy az index fogalma nemcsak sıkban, hanem mas ketdimenzios so-kasagokon, peldaul gombon, vagy toruszon hasonlokeppen definialhato. A Poincare-fele
101

indextetel szerint egy ketdimenzios sokasagon megadott vektormezo egyensulyi pontjaiindexenek osszege megegyezik a felulet Euler-karakterisztikajaval. Ennek erteke gombreχ(S2) = 2, toruszra χ(T 2) = 0, a projektıv sık eseten pedig χ(RP 2) = 1. Igy peldaulegy gomb felszınen megadott differencialegyenlet egyensulyi pontjai indexenek osszegemindig 2.
5.4. Vegtelenbeli viselkedes
Ketdimenzios faziskepek globalis osztalyozasanak egyik nehezsege abban rejlik, hogy afazissık nem kompakt es a vegtelenbeli viselkedest nehez megragadni. Ezen problemakezelesere kulonbozo projekciokat alkalmaznak, melyek a sıkot kompakt halmazra vetı-tik. Ezek kozul itt a Poincare-fele centralis vetıtest mutatjuk be, amely a fazissıkot egyfelgombre vetıti, a vegtelenbeli pontokat pedig a felgombot hatarolo korre (a megfelelogomb egyenlıtojere) viszi. Ezzel a vegtelenbeli viselkedes strukturaja reszletesen vizs-galhatova valik (jobban, mint az egypontu kompaktifikacio eseteben). Tekintsunk tehategy egyseg sugaru, origo kozepu gombot es egy sıkot, amely a gombot a (0, 0, 1) pontban(eszaki sark) erinti. Ezen sık origoja legyen az erintesi pont, es a sıkon a koordinata-kat jelolje (x, y). A terbeli koordinatak jelolesere az X, Y, Z betuket hasznaljuk. A sıkpontjait olyan modon vetıtjuk a felso felgombre, hogy egy (x, y) pontot osszekotunk azorigoval (a gomb kozeppontjaval), majd a sıkbeli pontnak megfeleltetjuk azt a pontota felgombon, amelynel a sugar felgombot metszi. Az 5.9. Abran lathato derekszoguharomszogek hasonlosaga miatt a koordinatakat osszekapcsolo formula x = X/Z.
A sıkbeli (x, y) koordinatak segıtsegevel tehat vezessuk be az alabbi X, Y, Z koordi-natakat a terben
X = xZ
Y = yZ
Z =1√
x2 + y2 + 1.
Nezzuk meg, hogy ez a koordinata-transzformacio hogyan hat a sıkban megadott
x = P (x, y) (5.1)
y = Q(x, y) (5.2)
differencialegyenlet faziskepere. Differencialjuk a transzformaciot definialo azonossago-kat. Ekkor az
X = xZ + xZ
Y = yZ + yZ
Z = −Z3(xx+ yy)
102

5.9. abra. A sıkot a gomb felszınere kepezo transzformacio.
differencialegyenlet-rendszerhez jutunk. Helyettesıtsuk be ebbe az (5.1)-az (5.2) differen-cialegyenletbol a derivaltakat, valamint alkalmazzuk a transzformacio kepleteit. Ekkoraz X koordinatara vonatkozo differencialegyenlet
X = Z · P(XZ,Y
Z
)− Z ·X ·
(XP
(XZ,Y
Z
)+ Y Q
(XZ,Y
Z
)).
Hasonloan kapjuk a differencialegyenleteket az Y es Z valtozora is. A rovidseg ked-
veert P(XZ, YZ
)helyett ırjunk P -t, es hasonloan jarunk el Q eseteben is. Ekkor az uj
koordinatarendszerben a differencialegyenlet-rendszer
X = ZP − ZX(XP + Y Q) (5.3)
Y = ZQ− ZY (XP + Y Q) (5.4)
Z == −Z3(XP + Y Q). (5.5)
Egyszeruen lathato, hogy ennek a rendszernek az egyseggomb invarians felulete. Azezen feluleten letrejott faziskep felel meg az eredeti sıkbeli faziskepnek, a trajektoriakvegtelenbeli viselkedese pedig a gomb egyenlıtojen, azaz a Z = 0 sıkkal valo metszetenlathato.
Nezzuk meg nehany egyszeru linearis rendszer peldajan, hogy a jol ismert sıkbelifaziskep milyen vegtelenbeli viselkedest mutat.
103

Pelda 5.19. Tekintsuk a nyeregponttal rendelkezo
x = x
y = −y
linearis rendszert. Ekkor P (x, y) = x, Q(x, y) = −y, ıgy ZP = X, ZQ = −Y esZ(XP + Y Q) = X2 − Y 2. Helyettesıtsuk ezeket az (5.3)-(5.5) rendszerbe, ezzel az
X = X(1−X2 + Y 2)
Y = Y (−1−X2 + Y 2)
Z = −Z(X2 − Y 2)
rendszert kapjuk az uj valtozokra. Vizsgaljuk ennek faziskepet az egysegsugaru gombfelszınen. A vegesben levo egyensulyi pontok (0, 0, 1) es (0, 0,−1) nyeregpontok, mivelaz origo az eredeti rendszernek nyeregpontja volt, es ezek a pontok az origo vetıtesevelkeletkeztek a gomb feluleten. Vizsgaljuk most a vegtelenbeli egyensulyi pontokat. Ezekharmadik koordinataja Z = 0, ıgy az X2 + Y 2 = 1 egyenlet hatarozza meg azokat. EbbolX = 0 es Y = ±1 vagy X = ±1 es Y = 0. Igy a vegtelenben negy egyensulyi pont van:(1, 0, 0), (−1, 0, 0), (0, 1, 0), (0,−1, 0). Hatarozzuk meg ezek tıpusat. Az (1, 0, 0) pontbanvetıtsuk az egyenletet az X = 1 sıkra. Ekkor az
Y = Y (−2 + Y 2)
Z = −Z(1− Y 2)
ketvaltozos rendszert kapjuk. Ennek egyensulyi pontja a (0, 0) pont (ez felel meg az(1, 0, 0) pontnak). A rendszer Jacobi-matrixa a (0, 0)-ban(
−2 00 −1
),
tehat (0, 0) stabil csomo, azaz az (1, 0, 0) pont stabil csomo. Hasonloan vizsgalhato a ma-sik harom egyensulyi pont. A (−1, 0, 0) pont szinten stabil csomo, a (0, 1, 0) es (0,−1, 0)pontok pedig instabil csomopontok. Ezzel tehat a felso felgombon az 5.10. Abran lathatofaziskepet kapjuk. (A faziskepet a felso felgombrol fuggoleges vetıtessel az egyenlıto sık-jara vetıtjuk, az abran ez lathato.) Erdemes megjegyezni, hogy az egesz gombfeluletenosszesen hat egyensulyi pont van, ket nyeregpont es negy csomopont. Ezek indexeinekosszege 2(−1)+4 = 2 = χ(S2), amely a gomb Euler-karakterisztikajat adja. A Poincare-fele indextetel szerint egy ketdimenzios sokasagon megadott vektormezo egyensulyi pontjaiindexenek osszege megegyezik a felulet Euler-karakterisztikajaval.
104

5.10. abra. Nyeregponttal rendelkezo linearis rendszer vegtelenbeli viselkedese.
Pelda 5.20. Tekintsuk az instabil fokuszponttal rendelkezo
x = x− yy = x+ y
linearis rendszert. Ekkor P (x, y) = x−y, Q(x, y) = x+y, ıgy ZP = X−Y , ZQ = X+Yes Z(XP + Y Q) = X2 + Y 2. Helyettesıtsuk ezeket az (5.3)-(5.5) rendszerbe, ezzel az
X = X − Y −X(X2 + Y 2)
Y = X + Y − Y (X2 + Y 2)
Z = −Z2(X2 + Y 2)
rendszert kapjuk az uj valtozokra. Vizsgaljuk ennek faziskepet az egysegsugaru gomb fel-szınen. A vegesben levo egyensulyi pontok (0, 0, 1) es (0, 0,−1) instabil fokuszpontok,mivel az origo az eredeti rendszernek instabil fokuszpontja, es ezek a pontok az origo ve-tıtesevel keletkeztek a gomb feluleten. Vizsgaljuk most a vegtelenbeli egyensulyi pontokat.Ezek harmadik koordinataja Z = 0, ıgy az X2 + Y 2 = 1 egyenlet hatarozza meg azo-kat. Ha ezt a kifejezest az elso ket egyenletbe helyettesıtjuk, akkor lathatjuk, hogy ennekeleget tevo egyensulyi pontja nincs a rendszernek, azaz nincsenek vegtelenbeli egyensulyipontok. Ezzel tehat a felso felgombon az 5.11. Abran lathato faziskepet kapjuk. (A fa-ziskepet a felso felgombrol fuggoleges vetıtessel az egyenlıto sıkjara vetıtjuk, az abran ezlathato.) Erdemes megjegyezni, hogy az egesz gombfeluleten osszesen ket egyensulyi pont
105

5.11. abra. Instabil fokuszponttal rendelkezo linearis rendszer vegtelenbeli viselkedese.
van, mindketto instabil fokusz. Ezek indexe 1, ezert indexeik osszege 2 = χ(S2), amely agomb Euler-karakterisztikajat adja.
5.5. Feladatok
1. Legyen f : R → R differencialhato fuggveny. Az x = f(x) egyenletek topologi-kus ekvivalencia szerint hany osztalyba sorolhatok, ha az f fuggvenynek haromzerushelye van?
(A) 10, (B) 9, (C) 8
Valasz: (A).
2. Legyen f : R → R differencialhato fuggveny. Az x = f(x) egyenletek topolo-gikus ekvivalencia szerint hany osztalyba sorolhatok, ha az f fuggvenynek negyzerushelye van?
(A) 15, (B) 16, (C) 17
Valasz: (B).
3. Hany egyensulyi pontja van a vegtelenben a centrumponttal rendelkezo
x = −yy = x
106

rendszernek?(A) 2, (B) 3, (C) 0
Valasz: (C).
4. Hany egyensulyi pontja van a vegtelenben a csomoponttal rendelkezo
x = x
y = y
rendszernek?(A) 4, (B) 3, (C) 0
Valasz: (A).
107

6. fejezet
A bifurkacioelmelet alapjai esstrukturalis stabilitas
Az eddigi fejezetekben szamos modszert lathattunk differencialegyenlet-rendszerek fa-ziskepenek vizsgalatara. A kulonbozo alkalmazasokban megjeleno egyenletek altalabanparametereket is tartalmaznak, ıgy termeszetes kerdes, hogy a faziskep hogyan fugga parameterektol. Egy parameter erteket valtoztatva a differencialegyenlet megoldasamegvaltozik, azonban minosegi valtozas csak bizonyos specialis parameter ertekeknel ko-vetkezik be. Gondoljunk peldaul az x = ax differencialegyenletre, melyben a ∈ R aparameter. Ennek megoldasa, x(t) = eatx(0) nyilvan fugg az a parameter erteketol, deha a erteket peldaul a = 1-rol a = 1.01-re valtoztatjuk, akkor a megoldas minosegilegnem valtozik meg. Ezzel szemben az a = 0 korul minosegi valtozas kovetkezik be, hiszena = 0 eseten a megoldasok konstans fuggvenyek, viszont barmilyen kis pozitıv a ertekreszigoruan novok, negatıv a eseten pedig szigoruan fogyok. Azon parameterertekeket, me-lyeknel minosegi valtozas kovetkezik be, azaz a faziskep nem topologikusan ekvivalensa kozeli parameterertekekhez tartozo rendszerek faziskepevel, bifurkacios parameterer-tekeknek nevezzuk, a bekovetkezo minosegi valtozast pedig bifurkacionak hıvjuk. Eztfogalmazzuk meg altalanosan a kovetkezo definıcioban.
Tekintsuk az x(t) = f(x(t), λ) egyenletet, melyben f : Rn × Rk → Rn folytonosandifferencialhato fuggveny, a λ ∈ Rk vektor (gyakran csak egyetlen szam) a parameter.
Definıcio 6.1.. A λ0 ∈ Rk parameterertek regularis, ha letezik olyan δ > 0, hogy |λ −λ0| < δ eseten az f(·, λ) rendszer topologikusan ekvivalens a f(·, λ0) rendszerrel. Aλ0 ∈ Rk bifurkacios parameter, ha nem regularis.
Az elso szakaszban szamos peldan szemleltetjuk a definıcio jelenteset. Ezek kozott szere-pelni fognak a legfontosabb bifurkaciok is, melyek kozul nehanyat a kovetkezo fejezetbenaltalanosabban es reszletesebben is targyalni fogunk. A masodik szakaszban elegsegesfeltetelt adunk bifurkaciok megjelenesere, a harmadik szakaszban pedig a strukturalisstabilitassal foglalkozunk.
108

6.1. Elemi bifurkaciok normalformaja
Ebben a szakaszban bemutatjuk a leggyakrabban vizsgalt bifurkaciok normalformajat,azaz azokat a legegyszerubb egyenleteket, amelyekben ezek a bifurkaciok megjelennek.
Pelda 6.1. Vizsgaljuk meg az x = λ − x egyenletet, melyben λ ∈ R parameter. Azegyensulyi pont barmely λ eseten az x = λ pont. Ez a pont minden λ ertekre globalisanaszimptotikusan stabilis, azaz ehhez tartanak a palyak. A faziskepet kulonbozo λ erte-kekre ugy szoktak abrazolni, hogy a vızszintes tengelyen valtozik λ erteke, es egy adottλ ertekhez tartozo faziskepet az ott felvett fuggoleges egyenesen abrazoljak, amint a 6.1.abra mutatja. Az abran lathatjuk, hogy minden λ eseten ugyanaz a faziskep, nincs bi-furkacio, azaz minden λ ertek regularis. A kulonbozo λ ertekekhez tartozo faziskepektopologikus ekvivalenciaja formalisan is igazolhato a palyakat egymasba vivo homeomor-fizmusok megadasaval. Peldaul a λ = 0 ertekekhez tartozo faziskep palyait a h(p) = p−1eltolas a λ = 1 ertekekhez tartozo faziskep palyaira kepezi.
A 6.1. Peldaban szereplo differencialegyenlet faziskepe kulonbozo λ parameterertekekeseten.
Az alabbi animacioban a 6.1. Peldaban szereplo differencialegyenlet faziskepe lathato,amint a λ parameter −1 es 1 kozott valtozik.
Nezzunk most olyan egyenleteket, melyekben a bifurkacio megjelenik. Ezek kozul alegfontosabb es legegyszerubb a nyereg-csomo, vagy mas neven fold-bifurkacio.
Pelda 6.2 (Nyereg-csomo, vagy fold bifurkacio). Tekintsuk az x = λ − x2 egyen-letet, melyben λ ∈ R parameter. Az egyensulyi pont letezese ebben az esetben fugg λ
109

erteketol. Ha λ < 0, akkor nincs egyensulyi pont, ha λ = 0, akkor egy egyensulyipont van, az x = 0 pont, ha pedig λ > 0, akkor ket egyensulyi pont van x = ±
√λ.
A faziskepet kulonbozo λ ertekekre az elobbi peldahoz hasonloan abrazolhatjuk, aminta 6.1. abra mutatja. Az abran lathatjuk, hogy λ = 0 bifurkacios ertek, hiszen a bales jobb oldalan kulonbozo a faziskep. A λ 6= 0 ertekek viszont regularisak, hiszen ne-gatıv es pozitıv λ ertekek korul (λ erteket elegendoen kicsit valtoztatva), nem valtozik afaziskep. A kulonbozo λ 6= 0 ertekekhez tartozo faziskepek topologikus ekvivalenciaja for-malisan is igazolhato a palyakat egymasba vivo homeomorfizmusok megadasaval. Peldaula λ < 0 ertekekhez tartozo faziskepeket a h(p) = p identitas egymasba kepezi. A pozi-tıv λ ertekekhez tartozo faziskepeket szakaszonkent linearis h fuggvennyel lehet egymasbakepezni, ennek konkret megadasat az Olvasora bızzuk. Ebben a peldaban λ = 0 esetenbekovetkezo bifurkaciot nyereg-csomo, vagy fold-bifurkacionak nevezik. A nyereg-csomoelnevezes az x = λ − x2, y = −y ketdimenzios rendszerben bekovetkezo valtozasra utal,melyet a http: // www. cs. elte. hu/ ~simonp/ DinRJegyz honlap 5.3-as animaciojanlathatunk.
6.1. abra. Nyereg-csomo, vagy masneven fold-bifurkacio az x = λ− x2 differencialegyen-letben λ = 0 eseten.
Az alabbi animacioban az x = λ − x2 differencialegyenlet faziskepe lathato, amint aλ parameter −1 es 1 kozott valtozik.
Nyereg-csomo bifurkacio az x = λ − x2, y = −y ketdimenzios rendszerben λ = 0eseten.
Az egyenlethez kapcsolodo tovabbi animaciok a http: // www. cs. elte. hu/ ~simonp/
DinRJegyz/ cımen talalhatok.
110

Pelda 6.3 (Transzkritikus bifurkacio). Tekintsuk az x = λx − x2 egyenletet, mely-ben ismet λ ∈ R a parameter. Az x = 0 pont most barmely λ eseten egyensulyi pont.Ezen kıvul x = λ is egyensulyi pont, tehat λ 6= 0 eseten ket egyensulyi pont van, λ = 0eseten viszont csak egy. Tehat a λ = 0 erteknel bifurkacio van. A faziskepet kulonbozo λertekekre a 6.1. Peldahoz hasonloan abrazolhatjuk, amint a 6.2. abra mutatja. Az abranlathatjuk, hogy λ = 0 bifurkacios ertek, hiszen λ 6= 0 eseten mas a faziskep, mint λ = 0eseten. A λ 6= 0 ertekek viszont regularisak, hiszen negatıv es pozitıv λ ertekek korul (λerteket elegendoen kicsit valtoztatva), nem valtozik a faziskep. Negatıv λ eseten az x = 0egyensulyi pont stabil, es az x = λ egyensulyi pont instabil. Pozitıv λ eseten az x = λegyensulyi pont veszi at a stabilitast. Ezt a bifurkaciot a stabilitasvaltas miatt transzkri-tikus bifurkacionak nevezik. A kulonbozo λ 6= 0 ertekekhez tartozo faziskepek topologikusekvivalenciaja formalisan itt is igazolhato a palyakat egymasba vivo homeomorfizmusokmegadasaval, melyet ismet az Olvasora bızunk.
6.2. abra. Transzkritikus-bifurkacio az x = λx−x2 differencialegyenletben λ = 0 eseten.
Az alabbi animacioban az x = λx− x2 differencialegyenlet faziskepe lathato, amint aλ parameter −1 es 1 kozott valtozik.
Pelda 6.4 (Vasvilla-bifurkacio). Vizsgaljuk az x = λx−x3 egyenletet, melyben ismetλ ∈ R a parameter. Az x = 0 pont most is barmely λ eseten egyensulyi pont. Ezen kıvulx = ±
√λ is egyensulyi pont, ha λ > 0. Tehat λ < 0 eseten egy egyensulyi pont van,
λ > 0 eseten pedig harom, ıgy a λ = 0 erteknel bifurkacio van. A faziskepet kulonbozo λertekekre a 6.1. Peldahoz hasonloan abrazolhatjuk, amint a 6.3. abra mutatja. Az abran
111

lathatjuk, hogy λ = 0 bifurkacios ertek, hiszen a bal es jobb oldalan kulonbozo a faziskep.A λ 6= 0 ertekek viszont regularisak, hiszen negatıv, illetve pozitıv λ ertekek korul (λerteket elegendoen kicsit valtoztatva), nem valtozik a faziskep. Negatıv λ eseten az x = 0egyensulyi pont globalisan stabil. Pozitıv λ eseten az x = ±
√λ egyensulyi pontok veszik
at a stabilitast. Ezt a bifurkaciot a bifurkacios gorbe alakja miatt vasvilla-bifurkacionaknevezik. A kulonbozo λ < 0, illetve λ > 0 ertekekhez tartozo faziskepek topologikusekvivalenciaja formalisan itt is igazolhato a palyakat egymasba vivo homeomorfizmusokmegadasaval, melyet ismet az Olvasora bızunk.
6.3. abra. Vasvilla-bifurkacio az x = λx− x3 differencialegyenletben λ = 0 eseten.
Az alabbi animacioban az x = λx− x3 differencialegyenlet faziskepe lathato, amint aλ parameter −1 es 1 kozott valtozik.
Erdemes megvizsgalni, hogy egy uj parameter hozzavetele hogyan valtoztatja meg abifurkacios diagramot.
Pelda 6.5. Vizsgaljuk az x = λx − x3 + ε egyenletet, melyben λ ∈ R es ε ∈ R ketparameter. Eloszor rogzıtsuk λ erteket, es vizsgaljuk, hogy ε erteket valtoztatva ho-gyan alakul a faziskep. Az egyensulyi pontok az ε = x3 − λx gorben helyezkednek el,melynek ketfele alakja lehet λ elojeletol fuggoen. Ha λ < 0, akkor szigoruan mono-ton, ha pedig λ > 0, akkor egy maximuma es egy minimuma van. A 6.4. abran aλ = −1 es λ = 1 esetet abrazoltuk. Lathatjuk, hogy λ = −1 eseten minden ε er-tek regularis, hiszen a faziskep nem valtozik, minden ε ertekre egyetlen globalisan vonzo
112

egyensulyi pontja van a rendszernek. Viszont λ = 1 eseten az ε1 es ε2 ertekeknel fold-bifurkacio kovetkezik be, hiszen ezeknel ket egyensulyi pont szuletik, illetve tunik el. Te-hat a λ erteket valtoztatva az ε szerinti bifurkacios gorbe alakjaban is minosegi valtozaskovetkezik be, amint λ athalad a nullan. A bifurkacios gorbe alakulasat folyamatabana http: // www. cs. elte. hu/ ~simonp/ DinRJegyz honlap 5.7-es animacioja mutatja,statikusan pedig a haromdimenzios a 6.5. Abran lathatjuk.
A haromdimenzios abra felhasznalasaval megkaphatjuk, hogy rogzıtett ε eseten milyena λ szerinti bifurkacios diagram, melyet a λ = x2− ε/x gorbe ad meg. Rogzıtsuk eloszoraz ε = 0 erteket, es vegyuk a 6.5. abran levo felulet metszetet az ε = 0 sıkkal. Ekkora vasvilla-bifurkacional latott gorbet kapjuk, melyet a 6.3. Abran lathatunk. Rogzıtsunkezutan egy negatıv ε erteket, legyen ε = −1. Vegyuk a 6.5. Abran levo felulet metszetetaz ε = −1 sıkkal, ekkor a λ = x2 + 1/x gorbet kapjuk, melyet a 6.6. Abra bal oldalanlathatunk. Rogzıtsunk most egy pozitıv ε erteket, legyen ε = 1. Vegyuk a 6.5. Abran levofelulet metszetet az ε = 1 sıkkal, ekkor a λ = x2 − 1/x gorbet kapjuk, melyet a 6.6. abrajobb oldalan lathatunk. Ez az abra azt is mutatja, hogy a vasvilla-bifurkaciot megadoegyenletet egy tetszolegesen kis ε ertekkel perturbalva, eltunik a vasvilla-bifurkacio, eshelyette fold-bifurkacio jelenik meg. Ezt altalanosan ugy fogalmazzak meg, hogy a vasvilla-bifurkacio egy-parameteres rendszerekben nem tipikus, mert egy ket-kodimenzios elfajulasttartalmaz, amelyet tipikusan ketparameteres rendszerben lehet megfigyelni.
6.4. abra. Az x = λx−x3 +ε differencialegyenlet ε szerinti bifurkacios diagramja λ = −1es λ = 1 eseten.
Az alabbi animacioban az x = λx − x3 + ε differencialegyenlet ε szerinti bifurkaciosdiagramjanak alakulasa lathato, amint λ erteke −1 es 1 kozott valtozik.
113

Az egyenlethez kapcsolodo tovabbi animaciok a http: // www. cs. elte. hu/ ~simonp/
DinRJegyz/ cımen talalhatok.
6.5. abra. Az x = λx − x3 + ε differencialegyenlet ε es λ szerinti egyuttes bifurkaciosdiagramja.
Az alabbi animacioban az x = λx− x3 + ε differencialegyenlet λ szerinti bifurkaciosdiagramjalathato, amint a ε parameter −1 es 1 kozott valtozik.
Terjunk ra most olyan bifurkacios jelensegek vizsgalatara, melyeket egydimenziosfazisterben nem lehet megfigyelni.
Pelda 6.6 (Andronov–Hopf-bifurkacio). Vizsgaljuk a polar koordinatakban megadottr = λr + σr3, φ = 1 ketdimenzios rendszert, melyben λ ∈ R es σ ∈ R a parameterek.Rogzıtsuk eloszor a σ = −1 erteket (barmely σ < 0 eseten ugyanilyen jelenseget tapasz-talnank), es vizsgaljuk a faziskep alakulasat, amint λ erteke valtozik. Az origo barmelyλ eseten egyensulyi pont, stabilitasa az r fuggvenyre vonatkozo differencialegyenlet segıt-segevel egyszeruen eldontheto. Ha ugyanis λ < 0, akkor r = λr− r3 < 0, ıgy r szigoruanfogyo fuggveny, tehat minden megoldas az origohoz tart. Ha viszont λ > 0, es r <
√λ,
akkor r = r(λr − r2) > 0, ıgy r szigoruan novo fuggveny, tehat az origo instabil. Ezen-kıvul r =
√λ eseten r = 0, azaz a
√λ sugaru kor a rendszer periodikus palyaja, amely
orbitalisan aszimptotikusan stabilis, mivel r <√λ eseten r > 0, es r >
√λ eseten r < 0.
A most leırt jelenseget a 6.7. abra szemlelteti. Ezen r viselkedese lathato λ fuggvenyeben,a 6.1. Peldahoz hasonlo abrazolasban. A bifurkacio tehat a λ = 0 erteknel kovetkezikbe, a λ 6= 0 ertekek pedig regularisak. A ketdimenzios fazisterben a bifurkaciot a 6.8.
114

6.6. abra. Az x = λx−x3 +ε differencialegyenlet λ szerinti bifurkacios diagramja ε = −1es ε = 1 eseten.
abran lathatjuk. Ha λ < 0, akkor az origo globalisan aszimptotikusan stabilis, ha pedigλ > 0, akkor az origo instabilis, es a vonzast a stabil hatarciklus veszi at, melynek meretea λ ertekevel novekszik. Ezt a bifurkaciot szuperkritikus Andronov–Hopf-bifurkacionaknevezik.
Az alabbi animacioban az r = λr − r3 differencialegyenlet faziskepe lathato, amint aλ parameter −0, 1 es 0, 1 kozott valtozik.
Terjunk vissza az r = λr+σr3, φ = 1 rendszerhez, azonban most rogzıtsuk egy pozitıvσ erteket, legyen σ = 1. Az origo most is egyensulyi pont, es stabilitasa a λ valtoztatasavalugyanugy alakul, mint az iment, viszont periodikus megoldas most λ < 0 eseten van arendszerben, es ez orbitalisan instabilis. Az r viselkedese λ fuggvenyeben a 6.9. abranlathato. Az origo ilyen tıpusu stabilitasveszteset kemenynek nevezik (az elozo tıpus ehhezkepest lagy stabilitasvesztes), ugyanis most pozitıv λ eseten nem veszi at a stabilitasta hatarciklus, hanem a megoldasok vegtelenhez tartanak. A ketdimenzios fazisterben abifurkaciot a 6.10. abran lathatjuk. Ha λ < 0, akkor az origo aszimptotikusan stabilis,de vonzasi tartomanya csak az instabil periodikus megoldason beluli tartomany. Ha λ >0, akkor az origo instabilis, es a megoldasok vegtelenhez tartanak. Ezt a bifurkaciotszubkritikus Andronov–Hopf-bifurkacionak nevezik.
Az alabbi animacioban az r = λr + r3 differencialegyenlet faziskepe lathato, amint aλ parameter −0, 1 es 0, 1 kozott valtozik.
115

6.7. abra. Bifurkacio az r = λr − r3 differencialegyenletben λ = 0 eseten.
6.8. abra. Szuperkritikus Andronov–Hopf-bifurkacio, az origo elveszıti stabilitasat, esegy stabil hatarciklus szuletik.
Az eddigi peldakban a bifurkacio soran a faziskep egy egyensulyi pont kornyezetebenvaltozott meg. Az ilyen tıpusu valtozasokat lokalis bifurkacionak nevezik. Most olyan
116

6.9. abra. Bifurkacio az r = λr + r3 differencialegyenletben λ = 0 eseten.
6.10. abra. Szubkritikus Andronov–Hopf-bifurkacio, az origo elveszıti stabilitasat, esezzel parhuzamosan eltunik az instabil hatarciklus.
peldakat fogunk mutatni, melyeknel a valtozas nem egy egyensulyi pontban, hanemvalamilyen globalis alakzaton tortenik. Az alabbi peldakban ezek a globalis alakzatok a
117

kovetkezok lesznek: periodikus palya, homoklinikus palya es heteroklinikus palya.
Pelda 6.7 (Periodikus palya fold bifurkacioja). Vizsgaljuk a polar koordinatakbanmegadott r = r(λ− (r− 1)2), φ = 1 ketdimenzios rendszert, melyben λ ∈ R a parameter.Az elozo peldahoz hasonloan vizsgaljuk eloszor r viselkedeset λ fuggvenyeben. A bifur-kacios diagramot a 6.11. abran lathatjuk. Ha λ < 0, akkor r = r(λ − (r − 1)2) < 0,ıgy r szigoruan fogyo fuggveny, tehat minden megoldas az origohoz tart. Ha λ pozitıv,de nullahoz kozel van (λ < 1), akkor λ = (r − 1)2 eseten r = 0, azaz az origo kozepu1 ±√λ sugaru korok periodikus palyak. A belso kor instabil, a kulso pedig stabil hatar-
ciklus. A bifurkacio tehat λ = 0 eseten kovetkezik be. (Megjegyezzuk, hogy λ = 1 eseteneltunik a kisebbik periodikus palya, de ezzel a bifurkacioval most nem foglalkozunk.) Aketdimenzios fazisterben a bifurkaciot a 6.12. abran lathatjuk. Ha λ < 0, akkor az origoglobalisan aszimptotikusan stabilis, a λ = 0 bifurkacios erteknel ket hatarciklus szuletikaz origo korul, melyek sugara kozel van 1-hez. Fontos megjegyezni, hogy az Andronov–Hopf-bifurkacio eseteben a szuleto periodikus palya sugara nulla. Ha 0 < λ < 1, akkor azorigo korul ket periodikus palya van, a belso kor instabil, a kulso pedig stabil hatarciklus.A jelenseg a fold-bifurkaciohoz hasonlo, csak ebben az esetben nem egy stabil es egy in-stabil egyensulyi pont szuletik a ’semmibol’, hanem egy stabil es egy instabil hatarciklus.Ezert a bifurkaciot periodikus palyakra vonatkozo fold bifurkacionak nevezik.
6.11. abra. Bifurkacio az r = r(λ− (r − 1)2) differencialegyenletben λ = 0 eseten.
Az alabbi animacioban az r = r(λ − (r − 1)2) differencialegyenlet faziskepe lathato,amint a λ parameter −0, 1 es 0, 1 kozott valtozik.
118

6.12. abra. Periodikus palyakra vonatkozo fold-bifurkacio. A λ = 0 bifurkacios erteknelegy stabil es egy instabil hatarciklus szuletik az origo korul a ’semmibol’. Ezek sugara a’szuletes pillanataban’ kozel van 1-hez.
Pelda 6.8 (Homoklinikus palya bifurkacioja). Vizsgaljuk az
x = y, y = x− x2 + λy
ketdimenzios rendszert, melyben λ ∈ R a parameter. Ismert, hogy λ = 0 eseten aH(x, y) = x3
3− x2
2+ y2
2elso integral. Legyen ugyanis H∗(t) = H(x(t), y(t)), ekkor
H∗(t) = x2(t) · x(t)− x(t) · x(t) + y(t) · y(t) = λy2.
Tehat λ = 0 eseten a H fuggveny valoban konstans a palyak menten. Ezen felul a Hfuggveny Ljapunov-fuggvenykent is alkalmazhato, hiszen ha λ > 0, akkor a megoldasokmenten novekszik, ha pedig λ < 0, akkor a megoldasok menten csokken. Hatarozzuk mega faziskepet eloszor λ = 0 eseten. Ekkor egyszeruen a H szintvonalait kell meghatarozni,mert a palyak ezeken fekszenek. Igy kapjuk a 6.13. abran lathato faziskepet. Nezzukmost a λ < 0 esetet. Az egyensulyi pontok ekkor is a (0, 0) es az (1, 0) pontok, minta λ = 0 esetben. Az origo ekkor is nyeregpont, az (1, 0) pont viszont stabil fokusz.Felhasznalva, hogy a H fuggveny erteke most csokken a megoldasok menten, azt kapjuk,hogy a nyeregpontbol az elso sıknegyedbe kimeno palya az (1, 0) pontba fut be. Igy aziranymezot is megrajzolva a 6.14. abran lathato faziskepet kapjuk. A λ > 0 esetbenhasonloan jarhatunk el. Az egyensulyi pontok ekkor is a (0, 0) es az (1, 0) pontok, es azorigo tovabbra is nyeregpont, az (1, 0) pont viszont instabil fokusz. Felhasznalva, hogy a
119

H fuggveny erteke most novekszik a megoldasok menten, azt kapjuk, hogy a nyeregpontbaaz (1, 0) instabil fokuszbol kiindulo palya fut be. Igy az iranymezot is megrajzolva a 6.14.abran lathato faziskepet kapjuk. Tehat a bifurkacio a λ = 0 ertek eseten kovetkezik be.Ekkor a nyeregpont stabil es instabil sokasaganak van kozos resze, amely egy homoklinikuspalyat hoz letre.
6.13. abra. Az x = y, y = x− x2 + λy rendszer faziskepe λ = 0 eseten.
Az alabbi animacioban az x = y, y = x− x2 + λy rendszer faziskepe lathato, amint aλ parameter −0, 3 es 0, 3 kozott valtozik.
Az egyenlethez kapcsolodo tovabbi animaciok a http: // www. cs. elte. hu/ ~simonp/
DinRJegyz/ cımen talalhatok.
Pelda 6.9 (Heteroklinikus palya bifurkacioja). Vizsgaljuk az
x = 1− x2 − λxy, y = xy + λ(1− x2)
ketdimenzios rendszert, melyben λ ∈ R a parameter. Az egyensulyi pontok meghataro-zasahoz szorozzuk meg a masodik egyenletet λ-val, majd adjuk hozza az elso egyenlethez.Ekkor (1−x2)(1 +λ2) = 0, tehat az egyensulyi pontok elso koordinataja x = ±1, melybola masodik egyenlet alapjan y = 0. Tehat az egyensulyi pontok (±1, 0). Abrazoljuk eloszora faziskepet λ = 0 eseten. Ekkor az iranymezot megrajzolva a 6.15. abran lathato fa-ziskepet kapjuk. Az x-tengely −1 es 1 kozotti szakasza a rendszer heteroklinikus palyaja,amely osszekoti a ket nyeregpontot. Nezzuk meg, hogy mi tortenik ezzel a heteroklinikus
120

6.14. abra. Az x = y, y = x − x2 + λy rendszer faziskepe λ < 0 (bal) es λ > 0 (jobb)eseten.
palyaval, ha λ erteket megvaltoztatjuk. Egyszeruen ellenorizheto, hogy a (±1, 0) egyen-sulyi pontok tovabbra is nyeregpontok maradnak. Ha λ < 0, akkor y = 0 es x ∈ (−1, 1)eseten x > 0 es y = λ(1− x2) < 0, ezert ezen a szakaszon jobbra, lefele metszik a palyakaz x-tengelyt. A (−1, 0) nyeregpontbol jobbra kimeno palya tehat az also felsıkban haladaz x = 1 egyenes menten lefele, amint a 6.16. abran lathatjuk. Tehat λ < 0 eseten nincsheteroklinikus palya, amely osszekoti a nyeregpontokat. Hasonlo a helyzet λ > 0 eseten.Ekkor azonban y = 0 es x ∈ (−1, 1) eseten x > 0 es y = λ(1 − x2) > 0, ezert ezen aszakaszon jobbra, felfele metszik a palyak az x-tengelyt. A (−1, 0) nyeregpontbol jobbrakimeno palya tehat a felso felsıkban halad az x = 1 egyenes menten felfele, amint a 6.16.abran lathatjuk. A λ erteket valtoztatva tehat λ = 0 eseten heteroklinikus palya jelenikmeg, ezert a bifurkaciot heteroklinikus bifurkacionak nevezik.
Az alabbi animacioban az x = 1 − x2 − λxy, y = xy + λ(1 − x2) rendszer faziskepelathato, amint a λ parameter −0, 5 es 0, 5 kozott valtozik.
Az egyenlethez kapcsolodo tovabbi animaciok a http: // www. cs. elte. hu/ ~simonp/
DinRJegyz/ cımen talalhatok.
6.2. Bifurkacio megjelenesenek szukseges feltetelei
Az elozo szakaszban bemutatott peldak alapjan lathatjuk, hogy lokalis bifurkacio csaknemhiperbolikus egyensulyi pontban tortenhet. Ezt az allıtast fogjuk igazolni altalanosan
121
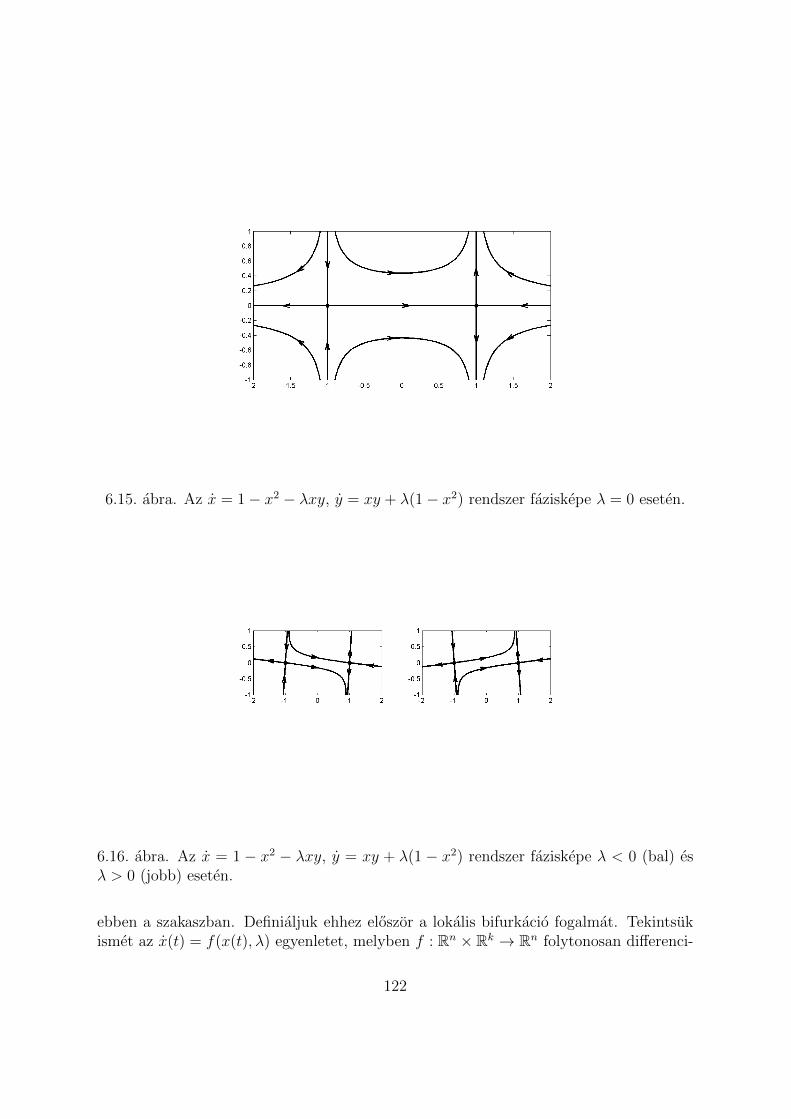
6.15. abra. Az x = 1− x2 − λxy, y = xy + λ(1− x2) rendszer faziskepe λ = 0 eseten.
6.16. abra. Az x = 1 − x2 − λxy, y = xy + λ(1 − x2) rendszer faziskepe λ < 0 (bal) esλ > 0 (jobb) eseten.
ebben a szakaszban. Definialjuk ehhez eloszor a lokalis bifurkacio fogalmat. Tekintsukismet az x(t) = f(x(t), λ) egyenletet, melyben f : Rn × Rk → Rn folytonosan differenci-
122

alhato fuggveny, a λ ∈ Rk vektor a parameter.
Definıcio 6.2.. Az (x0, λ0) par lokalisan regularis, ha letezik az x0 pontnak olyan U ⊂Rn kornyezete es δ > 0, hogy |λ − λ0| < δ eseten f |U(·, λ0) es f |U(·, λ) topologikusanekvivalensek (azaz x0 egy U kornyezeteben a faziskepek ekvivalensek). Az (x0, λ0) pontbanlokalis bifurkacio van, ha (x0, λ0) nem lokalisan regularis.
Eloszor igazoljuk, hogy lokalis bifurkacio csak egyensulyi pontban kovetkezhet be.
Allıtas 6.1. Ha f(x0, λ0) 6= 0, akkor (x0, λ0) lokalisan regularis.
Bizonyıtas. Egyszeruseg kedveert a bizonyıtast az n = 1 dimenzios esetben vegezzukel. Tegyuk fel, hogy f(x0, λ0) > 0. Ekkor mivel f folytonos, azert van az x0 pontnakolyan U kornyezete es van olyan δ > 0, hogy az U × [λ0 − δ, λ0 + δ] halmazban f ertekepozitıv. Igy ebben a halmazban a palyak felfele iranyıtott szakaszok, amint a 6.17.Abran lathatjuk. Igy az U kornyezetben nyilvan topologikusan ekvivalensek a faziskepekminden λ ∈ (λ0 − δ, λ0 + δ) eseten (a palyakat egymasba kepezo homeomorfizmus azidentitas). Megjegyezzuk, hogy n > 1 eseten a bizonyıtas hasonloan vegezheto el aKiegyenesıtesi tetel alkalmazasaval.
6.17. abra. A rendszer palyai egy nem-egyensulyi pont egy U kornyezeteben kulonbozoλ parameterertekekre ugyanolyanok.
Most megmutatjuk, hogy hiperbolikus egyensulyi pontban nem kovetkezhet be lokalisbifurkacio.
123

Allıtas 6.2. Ha f(x0, λ0) = 0 es ∂xf(x0, λ0) hiperbolikus, akkor (x0, λ0) lokalisan regu-laris. (Itt ∂xf(x0, λ0) az f Jacobi-matrixat jeloli.)
Bizonyıtas. Egyszeruseg kedveert a bizonyıtast most is csak az n = 1 dimenzios esetbenmutatjuk meg. Tegyuk fel, hogy ∂xf(x0, λ0) < 0. Ekkor az implicit fuggveny tetel szerintvan olyan δ > 0 es g : (λ0− δ, λ0 + δ)→ R fuggveny, melyre g(λ0) = x0 es f(g(λ), λ) ≡ 0minden λ ∈ (λ0−δ, λ0 +δ) eseten, ezenkıvul az x0 pontnak van olyan U kornyezete, hogyaz U × (λ0 − δ, λ0 + δ) halmazban az f mas pontokban nem tunik el. Mivel f folytono-san differencialhato, azert δ valaszthato olyan kicsire, hogy ∂xf(g(λ), λ) < 0 fennalljonminden λ ∈ (λ0− δ, λ0 + δ) eseten. Igy ezen λ ertekekre az U halmazban az egyenletnekpontosan egy stabilis egyensulyi pontja van, a palyak ebbe futnak be, amint a 6.18. Ab-ran lathatjuk. Igy az U kornyezetben nyilvan topologikusan ekvivalensek a faziskepekminden λ ∈ (λ0 − δ, λ0 + δ) eseten (a palyakat egymasba kepezo homeomorfizmus olyaneltolas, ami az egyensulyi pontokat egymasba viszi). Megjegyezzuk, hogy n > 1 eseten abizonyıtas hasonloan vegezheto el a Hartman-Grobman-tetel alkalmazasaval.
6.18. abra. A rendszer palyai egy hiperbolikus egyensulyi pont egy U kornyezetebenkulonbozo λ parameterertekekre ugyanolyanok.
6.3. Strukturalis stabilitas
A bifurkaciok vizsgalata soran egy x(t) = f(x(t)) differencialegyenletet ugy tekintunk,mint egy k parameteres x(t) = f(x(t), λ) differencialegyenlet csalad egy tagjat es azt
124

vizsgaljuk, hogy a k-dimenzios λ parametert valtoztatva, hogyan valtozik a faziskep.Most a kerdest valamivel altalanosabban kozelıtjuk meg, es az x(t) = f(x(t)) differen-cialegyenlettel egyutt az osszes C1 perturbaciojat tekintjuk, azaz az f jobboldalt egyfuggvenyter egy elemekent vizsgaljuk. A bifurkaciok vizsgalata soran egy parameterer-teket akkor neveztunk regularisnak, ha a kozeleben levokkel topologikusan ekvivalensfaziskep tartozott hozza. Ennek altalanosıtasa a strukturalisan stabil rendszer, amely ahozza C1 terben kozeli osszes rendszerrel topologikusan ekvivalens.
A definıcio absztrakt megfogalmazasahoz legyen X topologikus ter es ∼⊂ X × Xekvivalenciarelacio. (A topologikus ter fogalmat nem ismero Olvaso gondolhat metrikusvagy normalt terre.) Szamunkra a topologikus ter valamilyen fuggvenyter lesz a C1
topologiaval, az ekvivalenciarelacio pedig a topologikus ekvivalencia.
Definıcio 6.3.. Azt mondjuk, hogy x ∈ X strukturalisan stabil, ha az x pontnak vanolyan U ⊂ X kornyezete, hogy minden y ∈ U eseten x ∼ y.
Azt mondjuk, hogy x ∈ X bifurkacios pont, ha nem strukturalisan stabil.
Szemleletesen ugy is fogalmazhatunk, hogy x ∈ X akkor strukturalisan stabil, ha egyekvivalenciaosztalynak belso pontja, es akkor bifurkacios pont, ha osztalyok hataran he-lyezkedik el. Ez a szemlelet segıt a bifurkacio kodimenziojanak fogalmat is megvilagıtani.Egy adott bifurkacios pont kodimenziojan annak a hatarfeluletnek a kodimenziojat ert-juk, amely az adott pontot tartalmazza. A 6.19. Abran az A pont strukturalisan stabil,a B pont egy kodimenzios bifurkacios pont, a C pont pedig ket kodimenzios bifurkaciospont. Ez ugy is megfogalmazhato, hogy a B ponton keresztul megadhato olyan gorbe,amely a B-vel hataros osztalyok mindegyikebe belemegy, mıg a C ponton keresztul ilyengorbe nem adhato meg. A C koruli osztalyokat csak egy ket parameteres csalad tagjaitudjak elerni. Ezt fogalmazzuk meg altalanosan a kovetkezo definıcioban.
Definıcio 6.4.. Egy x ∈ X bifurkacios pont k kodimenzios, ha megadhato olyan g :Rk → X folytonos fuggveny, melyre g(0) = x, es az x pontnak olyan U kornyezete esannak egy V nyılt es suru resze, hogy minden y ∈ V ponthoz talalhato olyan α ∈ Rk,hogy g(α) ∼ y, es k a legkisebb ilyen dimenzio.
A tovabbiakban az absztrakt szinten megfogalmazott definıciokat differencialegyen-letekre fogjuk alkalmazni.
Az ekvivalenciarelacio, mint fent mar megfogalmaztuk, a topologikus ekvivalencialesz, hiszen ket differencialegyenletet akkor szeretnenk azonos osztalyba tartozonak te-kinteni, ha ugyanolyan a faziskepuk. Nezzuk most, hogy milyen teret valasszunk az Xtopologikus ter szerepere. Tekintsuk az x(t) = f(x(t)) differencialegyenletet, melybenf : Rn → Rn folytonosan differencialhato fuggveny. Az X ter termeszetes valasztasatehat a folytonosan differencialhato fuggvenyek tere. A teren valamilyen topologiat ismeg kell adni a strukturalis stabilitas definialasahoz. Induljunk ki a C0, vagy masnevenszupremum normabol, melyet ‖f‖0 fog jelolni, ez tehat az |f | szupremuma. (Kesobb
125

6.19. abra. Strukturalisan stabil (A), egy kodimenzios (B), es ket kodimenzios (C)bifurkacios pontok egy X topologikus terben.
visszaterunk arra, hogy ennek vegessege hogyan biztosıthato.) Egy egyszeru egydimen-zios pelda megmutatja, hogy ez a topologia nem szerencses valasztas. Tekintsuk ugyanisaz f(x) = x identitas fuggveny altal meghatarozott x = x differencialegyenletet. Az ffuggvenyhez a C0-normaban tetszolegesen kozel megadhato olyan g fuggveny, melyneknem csak egy gyoke van, ıgy az y = g(y) egyenlet faziskepe nem topologikusan ekvi-valens az x = x faziskepevel. A pelda tanulsaga az, hogy amennyiben az X teren aC0-normat valasztjuk, akkor csak olyan rendszerek lehetnek strukturalisan stabilisak,melyeknek nincs egyensulyi pontjuk, ami a strukturalis stabilitas tulsagosan szuk definı-cioja lenne, hiszen a legtobb ekvivalenciaosztalynak nem lenne egyaltalan belso pontja.A strukturalis stabilitas fogalmat jelentosen szelesıti a C1-norma valasztasa, melyet az‖f‖1 = ‖f‖0 + ‖f ′‖0 keplet ad meg. Tekintsuk ugyanis ismet az f(x) = x identitasfuggveny altal meghatarozott x = x differencialegyenletet. Az f fuggvenyhez a C1-normaban kelloen kozeli g fuggvenynek ugyanugy egy gyoke van, mint az f fuggveny-nek, ıgy az y = g(y) egyenlet faziskepe topologikusan ekvivalens az x = x faziskepevel.Igy az egyensulyi ponttal rendelkezo x = x egyenlet is strukturalisan stabil lehet, haa teren a C1-normat valasztjuk. A folytonosan differencialhato fuggvenyek C1-normajatermeszetesen nem veges, ha a fuggvenyeket nem kompakt halmazon ertelmezzuk. Ezertszoktak a strukturalis stabilitast kompakt halmazon ertelmezett egyenletek eseteben ta-nulmanyozni. Egyvaltozos egyenletek eseteben tehat celszeru a korvonalon ertelmezettdifferencialegyenletek strukturalis stabilitasat vizsgalni.
126

6.3.1. Egydimenzios rendszerek strukturalis stabilitasa
Vezessuk be az X = C1(S1,R) teret, amely olyan f : R→ R folytonosan differencialhatofuggvenyekbol all, melyek periodikusak es periodusuk 1, azaz f(x + 1) = f(x) mindenx ∈ R eseten. Legyen ezen a teren a norma
‖f‖1 = max[0,1]|f |+ max
[0,1]|f ′|.
Az alabbiakban megmutatjuk, hogy pontosan azok a differencialegyenletek strukturalisanstabilak, melyeknek csak hiperbolikus egyensulyi pontjuk van. Vezessuk be ezekre azalabbi jelolest.
G = f ∈ X : f(x) = 0⇒ f ′(x) 6= 0
A tetel bizonyıtasahoz szuksegunk lesz az alabbi fogalomra es fontos allıtasra.
Definıcio 6.5.. Legyen f : R → R C1 fuggveny. Azt mondjuk, hogy y regularis ertekeaz f fuggvenynek, ha f(x) = y eseten f ′(x) 6= 0. Tobbvaltozos esetben az y regulariserteke az f : Rn → Rn fuggvenynek, ha f(x) = y eseten det f ′(x) 6= 0. Azt mondjuk,hogy y kritikus ertek, ha y nem regularis ertek.
Lemma 6.6. (Sard). Egy f : Rn → Rn C1 fuggveny kritikus ertekeinek halmaza 0-merteku.
Ezt a lemmat nem bizonyıtjuk, mivel meghaladja e jegyzet kereteit. A lemma fel-hasznalasaval igazoljuk a kovetkezo allıtast.
Allıtas 6.3. A hiperbolikus egyensulyi ponttal rendelkezo rendszerek fenti G halmazasuru az X = C1(S1,R) terben.
Bizonyıtas. Egy fuggveny pontosan akkor van benne a G halmazban, ha 0 regulariserteke. Legyen f ∈ X es ε > 0 tetszoleges. Meg kell mutatni, hogy van olyan g ∈ G,melyre ‖f − g‖1 < ε. Ha 0 regularis erteke az f fuggvenynek, akkor g = f megfelelo,hiszen ekkor f ∈ G. Ha 0 nem regularis ertek, akkor valasszunk egy pozitıv, c <ε regularis erteket. Ilyen a Sard-lemma miatt letezik. Legyen ekkor g = f − c, ıgy‖f − g‖1 = c < ε, es g(x) = 0 eseten f(x) = c, ezert c regularitasa miatt f ′(x) 6= 0,amelybol g′(x) 6= 0 azonnal kovetkezik. Tehat a g fuggvenynek 0 regularis erteke, azazg ∈ G.
A tetel bizonyıtasa soran felhasznaljuk a kovetkezo allıtast is, mely szerint, ha egyfuggvenynek elfajult zerushelye van, akkor kis C1 perturbacioval a zerushely egy kornye-zeteben azonosan nullava teheto. Az allıtas szemleletesen nyilvanvalo, alabb a formalisbizonyıtast mutatjuk meg.
127

Allıtas 6.4. Legyen f ∈ X es tegyuk fel, hogy valamely x ∈ (0, 1) pontban f(x) = 0 =f ′(x). Ekkor barmely ε > 0 es α > 0 eseten van olyan g ∈ X fuggveny melyre fennallnakaz alabbiak:
1. f(y) = g(y) minden y /∈ (x− α, x+ α) eseten,
2. g azonosan 0 az x egy kornyezeteben,
3. ‖f − g‖1 < ε.
Bizonyıtas. Legyen η : R → [0, 1] olyan legalabb C1 fuggveny (a fuggveny akar C∞
simasagunak is valaszthato), mely a [−1, 1] intervallumon kıvul nulla, es a (−1/2, 1/2)intervallumban konstans egy. A fuggveny derivaltjanak maximumat jelolje M . Az ffuggvenyre tett feltetel miatt van olyan β < α pozitıv szam, hogy
|f(y)| < ε
4M|y − x| (6.1)
fennall minden y ∈ (x− β, x+ β) eseten. Legyen δ < β olyan pozitıv szam, melyre
max[x−δ,x+δ]
|f | < ε
2es max
[x−δ,x+δ]|f ′| < ε
4. (6.2)
Legyen ekkor g ∈ X a kovetkezo keplettel megadott fuggveny:
g(y) = f(y)
(1− η
(y − xδ
)).
Ellenorizzuk, hogy g teljesıti a kıvant felteteleket. Ha |y − x| ≥ α, akkor |y − x| > δ,melybol η
(y−xδ
)= 0, ıgy teljesul az 1. feltetel g(y) = f(y). Ha |y − x| < δ/2, akkor
η(y−xδ
)= 1, ıgy teljesul a 2. feltetel, g azonosan 0 az x egy kornyezeteben. A 3. feltetel
ellenorzesehez felhasznaljuk, hogy
f(y)− g(y) = f(y)η
(y − xδ
). (6.3)
Ennek alapjan az f − g fuggveny az [x− δ, x+ δ] intervallumon kıvul azonosan nulla, ıgyelegendo azt igazolni, hogy minden y ∈ [x− δ, x+ δ] eseten
|f(y)− g(y)| < ε
2es |f ′(y)− g′(y)| < ε
2. (6.4)
Mindket egyenlotlenseg igazolasahoz a (6.3) egyenletet hasznaljuk. Ebbol y ∈ [x− δ, x+δ] eseten |f(y) − g(y)| < |f(y)| < ε
2, ahol felhasznaltuk a (6.2) elso egyenlotlenseget.
Derivaljuk a (6.3) egyenloseget, ekkor
f ′(y)− g′(y) = f ′(y)η
(y − xδ
)+ f(y)η′
(y − xδ
)1
δ.
128

Hasznaljuk fel a (6.2) masodik egyenlotlenseget, a (6.1) egyenlotlenseget, valamint, hogyη derivaltjanak maximuma M . Ezekbol
|f ′(y)− g′(y)| < ε
4+
ε
4M|y − x|M
δ.
Mivel y ∈ [x− δ, x+ δ], azert |y − x| ≤ δ, ıgy az elobbi becsles ıgy folytathato:
|f ′(y)− g′(y)| < ε
4+
ε
4MδM
δ=ε
2.
Ezzel a kıvant, (6.4) kepletben szereplo becsleseket igazoltuk.
A kovetkezo allıtas elemien igazolhato.
Allıtas 6.5. Ha az x = f(x) egyenlet minden egyensulyi pontja hiperbolikus, akkor csakveges sok egyensulyi pontja lehet a [0, 1] intervallumban.
Bizonyıtas. Tegyuk fel, hogy vegtelen sok egyensulyi pont van a [0, 1] intervallumban.Ekkor ezekbol kivalaszthato egy konvergens sorozat, amely egy x ∈ [0, 1] ponthoz tart.Ekkor mivel f folytonosan differencialhato, azert f(x) = 0 es f ′(x) = 0, tehat x nem-hiperbolikus egyensulyi pont lenne, ami ellentmond a feltetelnek.
Most raterhetunk az egydimenzios strukturalisan stabil rendszerek jellemzesere.
Tetel 6.7.. Az f ∈ X fuggveny altal meghatarozott dinamikai rendszer pontosan akkorstrukturalisan stabil, ha f minden egyensulyi pontja hiperbolikus, azaz ha f ∈ G. (Ebbebeleertjuk azt az esetet is, amikor nincs egyaltalan egyensulyi pontja a rendszernek.)Ezenkıvul a strukturalisan stabil rendszerek halmaza G nyılt es suru az X terben.
Bizonyıtas. Tegyuk fel eloszor, hogy f strukturalisan stabil, es igazoljuk, hogy f ∈ G.Mivel f ekvivalens egy kornyezeteben levo rendszerekkel, es G suru, azert van olyang ∈ G, amely benne van az f ezen kornyezeteben, tehat ekvivalens az f fuggvennyel.Mivel a g fuggveny minden gyoke hiperbolikus, azert veges sok gyoke van, ıgy f es gekvivalenciaja miatt az f fuggvenynek is veges sok gyoke van. Megmutatjuk, hogy ezekmind hiperbolikusak. Mivel a gyokok izolaltak, azert ha valamelyik nem hiperbolikuslenne, akkor a 6.4. Allıtas szerint tetszolegesen kis C1 perturbacioval a zerushely egykornyezeteben azonosan nullava teheto lenne a fuggveny, azaz lenne az f fuggvenyheztetszolegesen kozel olyan fuggveny, amely egy szakaszon konstans nulla. Ez viszont nemlehet ekvivalens az f fuggvennyel, ami ellentmond annak, hogy f strukturalisan stabil.Ezzel az egyik iranyu allıtast igazoltuk.
Tegyuk most fel, hogy f ∈ G, es igazoljuk, hogy f strukturalisan stabil. A 6.5. Allıtasmiatt az f fuggvenynek csak veges sok gyoke lehet. Ha az f fuggvenynek nincs gyoke,akkor a hozza C1-normaban kozel levo fuggvenyeknek sincs gyoke, ıgy az f fuggvennyelekvivalensek. Ha az f fuggvenynek vannak zerushelyei, akkor egyszeruen lathato, hogya hozza C1-normaban kozel levo fuggvenyeknek is ugyanannyi zerushelye van, es azokkozott az elojeluk ugyanugy valtozik, mint az f elojele. Ebbol pedig kovetkezik, hogy azf altal meghatarozott faziskeppel ekvivalens faziskepet adnak.
129

6.3.2. Strukturalis stabilitas tobb dimenzios rendszerekben
Egydimenzios esetben a faziskep csak egy nem-hiperbolikus egyensulyi pont kornyeze-teben valtozhat meg. Ketdimenzios rendszerek eseteben lattunk olyan bifurkaciokat,amelyek nem egy egyensulyi ponthoz kotodtek, nevezetesen: periodikus palya fold bifur-kacioja, homoklinikus palya bifurkacioja, illetve heteroklinikus palya bifurkacioja. Le-egyszerusıtve azt lehet mondani, hogy az olyan ketdimenzios rendszerek strukturalisanstabilak, amelyekben ilyenek nincsenek, azaz akkor strukturalisan stabil a rendszer, haaz egyensulyi pontok es periodikus palyak hiperbolikusak, es nincsenek nyeregponto-kat osszekoto palyak. Ezt eloszor Andronov es Pontrjagin igazoltak 1937-ben olyansıkbeli rendszerekre, melyeket csak egy pozitıvan invarians korlatos tartomanyon tekin-tunk. Ennek pontos megfogalmazasat megtalalhatjuk Kuznyecov konyveben [17] a 2.5.Tetelben. A kompakt ketdimenzios sokasagokra vonatkozo analog allıtast Peixoto bi-zonyıtotta 1962-ben. Ez utobbi tetelt fogalmazzuk meg az alabbiakban. Jelolje S2 aketdimenzios gombfeluletet, es vezessuk be az X = C1(S2,R2) teret, a gombfeluletenertelmezett vektormezok halmazat. Egy ilyen vektormezo, mint a differencialegyenletjobboldala meghataroz egy faziskepet az S2 gombfeluleten. Ezekre a fenti modon ertel-mezzuk a topologikus ekvivalenciat, ıgy a 6.3.. Definıcio segıtsegevel ertelmezhetjuk azX terben a strukturalisan stabil egyenleteket. Ezeket jellemzi Peixoto alabbi tetele.
Tetel 6.8. (Peixoto). Az f ∈ X fuggveny altal meghatarozott dinamikai rendszer pon-tosan akkor strukturalisan stabil, ha
• veges sok egyensulyi pont van, es mindegyik hiperbolikus,
• veges sok periodikus palya van, es mindegyik hiperbolikus,
• nincs nyeregpontokat osszekoto (heteroklinikus, vagy homoklinikus) palya.
Ezenkıvul a strukturalisan stabil rendszerek halmaza nyılt es suru az X terben.
Megjegyezzuk, hogy Peixoto a tetelt altalanosabban, tetszoleges kompakt sokasagra iga-zolta. Mar a toruszon megadhato olyan egyszeru, nem strukturalisan stabil differencial-egyenlet, amely a fenti tetel egyik feltetelet sem serti, tehat mas is szukseges a strukturalisstabilitashoz. Tetszoleges kompakt sokasag eseten tovabbi feltetel, hogy a nem-vandorlopontok csak egyensulyi pontok, vagy periodikus pontok lehetnek. A tetel ilyen altalanosmegfogalmazasa megtalalhato Perko [19] es Wiggins [27] konyveben.
Az egy- es ketdimenzios esetek alapjan sejtest fogalmazhatunk meg a strukturalisstabilitas feltetelere tetszoleges dimenzioban. Ennek alapjan fogalmazzuk meg a Morse–Smale-rendszerek alabbi definıciojat.
Definıcio 6.9.. Egy dinamikai rendszert Morse–Smale-rendszernek nevezunk, ha
• veges sok egyensulyi pontja van, es mindegyik hiperbolikus,
130

• veges sok periodikus palyaja van, es mindegyik hiperbolikus,
• ezek stabil es instabil sokasagai transzverzalisan metszik egymast,
• a nem-vandorlo pontok csak egyensulyi pontok, vagy periodikus pontok lehetnek.
Igazolhato, hogy a Morse–Smale-rendszerek strukturalisan stabilak, azonban a meg-fordıtas harom, vagy magasabb dimenzioban nem igaz, amit Smale igazolt 1966-ban.Vannak olyan strukturalisan stabil rendszerek legalabb haromdimenzios fazister eseten,amelyeknel a nemvandorlo pontok halmazaban ugynevezett kulonos attraktorok vannak,amelyeken a palyak viselkedese kaotikus. Ezenkıvul igazolhato az is, hogy legalabb ha-romdimenzios fazister eseten vannak a C1 rendszerek halmazaban olyan nyılt halmazok,melyekben kizarolag nem strukturalisan stabil rendszerek vannak. Azaz a strukturalisanstabil rendszerek nem alkotnak nyılt es suru halmazt, sot meg ilyenek metszetekent semallıthatok elo, amit ugy szoktak megfogalmazni, hogy a strukturalis stabilitas legalabbharomdimenzios fazister eseten nem tipikus tulajdonsag. Ez azt is jelenti, hogy a to-pologikus ekvivalencia nem olyan szep modon bontja nyılt halmazokra a C1 rendszerekteret, amint azt a sematikus 6.19. Abra sugallja. Magasabb dimenzios fazisteru dinami-kai rendszerek strukturalis stabilitasanak vizsgalataban, es az iment emlıtett eredmenyekigazolasaban kulcsszerepet jatszik egy Smale altal bevezetett ketvaltozos lekepezes, ame-lyet rola, es a lekepezes vizualis megjelenıteserol Smale-patkonak neveznek. A lekepezestreszletesen vizsgalja tobbek kozott Guckenheimer es Holmes konyve [11], illetve Wigginsmonografiaja [27].
131

7. fejezet
Egy kodimenzios bifurkaciok, anyereg-csomo es azAndronov–Hopf-bifurkacio
A 6.2. Fejezetben megmutattuk, hogy lokalis bifurkacio csak nemhiperbolikus egyensu-lyi pontban kovetkezhet be. Ebben a fejezetben megmutatjuk, hogy ebben az esetbentipikusan ketfele bifurkacio lehet, nyereg-csomo vagy Andronov–Hopf-bifurkacio. Ennekeldonteseben pedig a jobboldal sorfejtesenek elsonel magasabb foku tagjai fognak szerepetjatszani. E ket bifurkacio reszletes ismertetesevel az is a celunk, hogy a bifurkacioelme-let alapveto megkozelıteset bemutassuk. Ez a kovetkezo lepesekbol all. Egy egyszerurendszerben megfigyelunk valamilyen valtozast a faziskepben, amint a parameter (vagyparameterek) erteke valtozik. Ezutan megfogalmazzuk geometriai modon ezen valtozaslenyeget (peldaul egy egyensulyi pont elveszıti stabilitasat es korulotte egy periodikuspalya jelenik meg). Vegul pedig meghatarozzuk a jobboldal derivaltjaira vonatkozo azonfelteteleket, amelyek teljesulese eseten az emlıtett valtozas bekovetkezik. Ezt a prog-ramot a nyereg-csomo es az Andronov–Hopf-bifurkacio eseteben hajtjuk vegre. Ezutanketparameteres rendszerekben bemutatjuk, hogy hogyan lehet ezen bifurkaciok gorbeitmeghatarozni az ugynevezett parametrikus reprezentacio modszerevel, illetve hogyan ad-hatok meg a Takens–Bogdanov-bifurkacios pontok a ket gorbe erintkezesi pontjaikent.
7.1. Nyereg-csomo bifurkacio
Eloszor emlekeztetunk arra, hogy a x = λ−x2 egyenletben a λ = 0 parameternel nyereg-csomo vagy mas neven fold bifurkacio kovetkezik be. Ezen azt ertjuk, hogy ha λ < 0,akkor nincs egyensulyi pont, ha λ = 0, akkor egy egyensulyi pont van, az x = 0 pont,ha pedig λ > 0, akkor ket egyensulyi pont van x = ±
√λ, az egyik stabil, a masik pedig
instabil. Ez az eszrevetel kepezi a fenti program elso pontjat, nevezetesen a bifurkacio
132

megfigyeleset egy adott differencialegyenletben.A program masodik pontjakent megfogalmazzuk, hogy mit fogunk erteni altalanosan
nyereg-csomo bifurkacio alatt. Tekintsuk az x(t) = f(x(t), λ) egyenletet, melyben f :R× R→ R folytonosan differencialhato fuggveny, a λ ∈ R szam a parameter.
Definıcio 7.1.. Az (x0, λ0) ∈ R2 pontban nyereg-csomo bifurkacio van, ha van az x0
pontnak olyan U ⊂ R kornyezete es van olyan δ > 0, hogy
• λ0 − δ < λ < λ0 eseten U-ban 0 (2) db egyensulyi pont van;
• λ = λ0 eseten U-ban 1 db egyensulyi pont van;
• λ0 < λ < λ0 + δ eseten U-ban 2 (0) db egyensulyi pont van.
Azaz λ elott nincs egyensulyi pont, utana pedig ketto van, illetve fordıtva. Lasd a 7.1.abran.
7.1. abra. Nyereg-csomo bifurkacio az (x0, λ0) ∈ R2 pontban.
Megjegyezzuk, hogy az f fuggvenyrol kello simasagot feltetelezve, a fenti feltevesekazt jelentik, hogy az (x, λ) ∈ R2 : f(x, λ) = 0 gorbe (λ0 − δ, λ0 + δ) × U teglalapbaeso resze a λ = λ0 egyenes egyik oldalan helyezkedik el, es a teglalapot ket reszre osztja,az egyikben f < 0, a masikban f > 0. Tehat ez is lehetne a nyereg-csomo bifurkaciodefinıcioja.
133

A 7.1. abra alapjan azt is lathatjuk, hogy a definıcio az alabbi absztraktabb formabanis megfogalmazhato. (Ezt a definıciot vezeti be Kuznyecov is konyveben [17].) Tekintsuka nyereg-csomo bifurkacio normalformajakent bevezetett x = λ−x2 egyenletet a (−1, 1)×(−1, 1) halmazban. (Most λ0 = 0 es x0 = 0.) Azt mondjuk, hogy az x(t) = f(x(t), λ)egyenletben az (x0, λ0) ∈ R2 pontban nyereg-csomo bifurkacio van, ha van az x0 pontnakolyan U ⊂ R kornyezete es van olyan δ > 0, amelyekre megadhato olyan p : (−1, 1) →(λ0−δ, λ0 +δ) homeomorfizmus, hogy az x = λ−x2 egyenlet λ ertekhez tartozo faziskepea (−1, 1) intervallumban topologikusan ekvivalens az x(t) = f(x(t), p(λ)) faziskepevel azU intervallumban. Tehat a p lekepezes felelteti meg egymasnak az azonos faziskepet adoparametereket.
Nezzunk meg egy egyszeru peldat, amelyben konnyen lathato, hogy nyereg-csomobifurkacio tortenik.
Pelda 7.1. Tekintsuk az x = λ− x2 + x3 differencialegyenletet. Az egyensulyi pontokata λ = x2 − x3 gorbe adja meg, amely nyilvan erinti a λ = 0 fuggoleges egyenest a (0, 0)pontban. Igy kelloen kis δ > 0 szamot es egy nullat tartalmazo megfelelo U intervallumotvalasztva teljesulnek a definıcioban leırt feltetelek, amint a 7.2. Abran lathatjuk.
7.2. abra. Nyereg-csomo bifurkacio a (0, 0) pontban az x = λ− x2 + x3 egyenletben.
Az alabbi tetelben elegseges feltetelt adunk az f fuggveny (x0, λ0) pontbeli derivalt-jainak segıtsegevel arra, hogy az x(t) = f(x(t), λ) egyenletben nyereg-csomo bifurkaciokovetkezzen be.
134

Tetel 7.2.. Legyen f : R × R → R ketszer folytonosan differencialhato fuggveny, estekintsuk az x(t) = f(x(t), λ) egyenletet. Tegyuk fel, hogy f(x0, λ0) = 0 es ∂xf(x0, λ0) =0. (Ezek a lokalis bifurkacio szukseges feltetelei.) Ha ezeken kıvul fennall
∂λf(x0, λ0) 6= 0 es ∂xxf(x0, λ0) 6= 0,
akkor az (x0, λ0) pontban nyereg-csomo bifurkacio van.
Bizonyıtas. Az implicit fuggveny tetelt alkalmazzuk olyan modon, hogy az f(x, λ) = 0egyenletbol kifejezzuk λ-t. Ez azert teheto meg, mert ∂λf(x0, λ0) 6= 0, azaz teljesul a tetelfeltetele. A tetel szerint letezik az x0 pontnak olyan U kornyezete, es olyan g : U → Rketszer folytonosan differencialhato fuggveny, melyre g(x0) = λ0 es f(x, g(x)) = 0 mindenx ∈ U eseten, valamint van olyan δ > 0, hogy a (λ0 − δ, λ0 + δ) × U teglalapban azf(x, λ) = 0 egyenletnek nincs mas megoldasa, azaz az egyenlet megoldasa λ = g(x). Adefinıcio utani megjegyzes szerint eleg igazolni, hogy a g fuggveny grafikonja a λ = λ0
egyenes egyik oldalan helyezkedik el lokalisan, amihez elegendo, hogy g′(x0) = 0 esg′′(x0) 6= 0. Ennek igazolasahoz derivaljuk az f(x, g(x)) = 0 egyenletet. Ekkor
∂1f(x, g(x)) + ∂2f(x, g(x))g′(x) = 0, (7.1)
melyet x = x0-ra alkalmazva es felhasznalva, hogy g(x0) = λ0, azt kapjuk hogy
∂1f(x0, λ0) + ∂2f(x0, λ0)g′(x0) = 0.
A tetel feltetelei szerint ∂1f(x0, λ0) = 0 es ∂2f(x0, λ0) 6= 0, ıgy g′(x0) = 0.Derivaljuk most a (7.1) egyenletet, es alkalmazzuk ismet x = x0-ra. Felhasznalva,
hogy g′(x0) = 0 az alabbi egyenlethez jutunk.
∂11f(x, g(x)) + ∂2f(x, g(x))g′′(x) = 0,
melybol a tetel feltetelei miatt g′′(x0) 6= 0 adodik.
Megjegyezzuk, hogy hasonlo, de technikailag bonyolultabb elegseges megfogalmaz-hato akkor is, ha a fazister magasabb dimenzios. A tetel n-dimenzios megfelelojet So-tomayor igazolta 1976-ban. Ezt a tetelt Perko konyveben a 4. fejezet 1. Tetelekenttalalhatja meg az erdeklodo Olvaso.
7.2. Andronov–Hopf-bifurkacio
Eloszor emlekeztetunk arra, hogy Andronov–Hopf-bifurkacio az r = λr + σr3, φ = 1ketdimenzios rendszerben kovetkezik be, amint λ athalad a nullan. A bifurkacionakketfele tıpusa van. A szuperkritikus esetben, amikor σ < 0, a kovetkezo tortenik. Ha
135

λ < 0, akkor az origo globalisan aszimptotikusan stabilis, ha pedig λ > 0, akkor azorigo instabilis, es a vonzast egy stabil hatarciklus veszi at, melynek merete a λ ertekevelnovekszik. A szubkritikus esetben, amikor σ > 0, a hatarciklus instabil, es λ < 0 esetenjelenik meg.
A polar-koordinatakban megadott egyenletet celszeru felırni Descartes-kordinatakbanis. Ekkor (a pozitıv forgasirany helyett az oramutato jarasa szerintire (φ = −1) attervekenyelmi okokbol) az
x1 = λx1 + x2 + σx1(x21 + x2
2), (7.2)
x2 = −x1 + λx2 + σx2(x21 + x2
2) (7.3)
rendszerhez jutunk.Ebben a szakaszban elegseges feltetelt adunk arra, hogy egy altalanos x(t) = f(x(t), λ)
rendszerben, melyben f : R2 × R → R2 kelloen sima fuggveny ilyen valtozas kovetkez-zen be valamilyen λ0 parametererteknel egy x0 egyensulyi pontban. Mivel x0 egyensulyipont, azert f(x0, λ0) = 0, es mivel a 6.2. Allıtas szerint nem lehet hiperbolikus, azerta ∂xf(x0, λ0) Jacobi-matrix sajatertekei nulla valosreszuek. Az elobbi szakaszban lat-tuk, hogy amennyiben ennek a matrixnak a 0 sajaterteke, akkor nyereg-csomo bifurkaciokovetkezhet be. A fenti peldaban pedig lathato, hogy a bifurkacio megjelenesekor aJacobi-matrixnak kepzetes sajatertekei vannak. Ezert olyan egyenleteket vizsgalunk,melyekben a ∂xf(x0, λ0) Jacobi-matrix sajatertekei ±iω. Meg fogjuk mutatni, hogyamennyiben bizonyos transzverzalitasi feltetelek is teljesulnek, akkor az x0 pontban λ0
parametererteknel Andronov–Hopf- bifurkacio kovetkezik be. A bifurkaciot ismet geo-metriai jellemzoinek segıtsegevel definialjuk.
Definıcio 7.3.. A λ0 parametererteknel az x0 pontban szuperkritikus Andronov–Hopf-bifurkacio van, ha letezik δ > 0 es letezik x0-nak olyan U kornyezete, hogy
• λ0 − δ < λ ≤ λ0 (vagy λ0 ≤ λ < λ0 + δ) eseten U-ban egy stabil egyensulyi pontvan es nincs hatarciklus;
• λ0 < λ < λ0 + δ (vagy λ0 − δ < λ < λ0) eseten U-ban egy instabil egyensulyi pontvan es egy stabil hatarciklus.
Definıcio 7.4.. A λ0 parametererteknel az x0 pontban szubkritikus Andronov–Hopf-bifurkaciovan, ha letezik δ > 0 es letezik x0-nak olyan U kornyezete, hogy
• λ0 − δ < λ ≤ λ0 (vagy λ0 ≤ λ < λ0 + δ) eseten U-ban egy stabil egyensulyi pont esegy instabil hatarciklus van;
• λ0 < λ < λ0 + δ (vagy λ0 − δ < λ < λ0) eseten U-ban egy instabil egyensulyi pontvan es nincs hatarciklus.
136

Megjegyezzuk, hogy ez a definıcio is megfogalmazhato a Kuznyecov konyveben [17]is bemutatott absztraktabb formaban. Tekintsuk az Andronov–Hopf-bifurkacio nor-malformajakent bevezetett a (7.2)-(7.3) rendszert a egyenletet a B(0, 1) × (−1, 1) hal-mazban, ahol B(0, 1) az origo kozepu 1 sugaru kor a fazissıkon. (Most λ0 = 0 esx0 = 0.) Az altalanosabb definıcio szerinte akkor mondjuk, hogy az x(t) = f(x(t), λ)egyenletben az (x0, λ0) ∈ R2 pontban Andronov–Hopf-bifurkacio van, ha van az x0
pontnak olyan U ⊂ R2 kornyezete es van olyan δ > 0, amelyekre megadhato olyanp : (−1, 1) → (λ0 − δ, λ0 + δ) homeomorfizmus, hogy a (7.2)-(7.3) rendszer λ ertek-hez tartozo faziskepe a B(0, 1) korben topologikusan ekvivalens az x(t) = f(x(t), p(λ))faziskepevel az U halmazban. Tehat a p lekepezes felelteti meg egymasnak az azonosfaziskepet ado parametereket.
A polar-koordinata transzformacio utan egyszeruen lathato, hogy a (7.2)-(7.3) rend-szerben a fenti definıciok ertelmeben Andronov–Hopf-bifurkacio kovetkezik be. A to-vabbiakban az a celunk, hogy bonyolultabb rendszerek eseteben (amikor a megjelenoperiodikus palya mar nem kor, ıgy a polar-koordinatak nem segıtenek) is elegseges fel-tetelt adjunk a bifurkacio megjelenesere. Az elegseges feltetelt nem a legaltalanosabbesetben mutatjuk meg azonnal, hanem fokozatosan vezetunk be egyre altalanosabb ese-teket, hogy a bizonyıtas egyes reszleteinek ertelmere jobban ra tudjunk vilagıtani.
A tetel bizonyıtasanak alapvetoen ketfele modja jelenik meg az irodalomban. Az egyikmodszer a Poincare-lekepezes alkalmazasan alapul, ennek segıtsegevel igazoljak a peri-odikus megoldas letezeset. A masik modszer Ljapunov-fuggveny segıtsegevel konstrualBendixson-zsakot. A ket modszer kapcsolatarol Chicone konyveben [7] olvashatunk. Mia tovabbiakban a masodik modszert alkalmazzuk. Ehhez eloszor a Ljapunov-fuggvenytkonstrualjuk meg a bifurkacios parameterertekhez tartozo rendszerhez. Ugyanezt aLjapunov-fuggvenyt lehet majd a parameter valtoztatasa eseten a Bendixson-zsak meg-adasahoz hasznalni.
7.2.1. A Ljapunov-fuggveny eloallıtasa
A tovabbiakban szuksegunk lesz az alabbi jelolesekre. Jelolje Hk a
P (x1, x2) = p0xk1 + p1x
k−11 x2 + p2x
k−21 x2
2 + . . .+ pkxk2
alaku homogen ketvaltozos polinomok teret. Ezen polinomok becslesere alkalmazni fog-juk az alabbi egyszeruen igazolhato allıtasokat.
Allıtas 7.1. Legyen P ∈ H2, ekkor a K = |p0|+ |p1|+ |p2| jelolessel
|P (x1, x2)| ≤ K(x21 + x2
2).
Allıtas 7.2. Legyen P ∈ H3, ekkor van olyan r : R2 → R folytonos fuggveny, melyrer(0, 0) = 0 es
|P (x1, x2)| ≤ r(x1, x2)(x21 + x2
2).
137

A masodik allıtas egyszeruen kovetkezik az elsobol, az elso igazolasahoz pedig mindosszeaz elemi 2x2
1x22 ≤ (x2
1 + x22)2 egyenloseget kell alkalmazni.
A Ljapunov-fuggvenyt az
x1 = x2 + A2(x1, x2) + A3(x1, x2) + A4(x1, x2), (7.4)
x2 = −x1 +B2(x1, x2) +B3(x1, x2) +B4(x1, x2) (7.5)
rendszerhez fogjuk megadni, melyben A2, B2 ∈ H2 homogen masodfoku polinomok,A3, B3 ∈ H3 homogen harmadfoku polinomok, es az A4, B4 fuggvenyek tartalmazzaka magasabb foku tagokat, amin azt ertjuk, hogy megadhatok olyan c1, c2 ∈ R szamok,melyekkel
|A4(x1, x2)| ≤ c1(x21 + x2
2)2, |B4(x1, x2)| ≤ c2(x21 + x2
2)2. (7.6)
Keressuk a Ljapunov-fuggvenyt
V (x1, x2) =1
2(x2
1 + x22) + P3(x1, x2) + P4(x1, x2)
alakban, ahol P3 ∈ H3 homogen harmadfoku polinom es P4 ∈ H4 homogen negyedfokupolinom. Ekkor a V fuggveny Lie-derivaltja, vagy rendszer szerinti derivaltja
LfV = ∂1V f1 + ∂2V f2
= (x1 + ∂1P3 + ∂1P4)(x2 + A2 + A3 + A4)
+ (x2 + ∂2P3 + ∂2P4)(−x1 +B2 +B3 +B4)
= Q3 +Q4 +Q5,
ahol a rovidseg kedveert a fuggvenyek argumentumat nem ırtuk ki, es
Q3 = x1A2 + x2B2 + x2∂1P3 − x1∂2P3,
Q4 = x1A3 + x2B3 + A2∂1P3 +B2∂2P3 + x2∂1P4 − x1∂2P4,
a Q5 tag pedig a legalabb otodfoku tagokat tartalmazza, azaz letezik olyan r : R2 → Rfolytonos fuggveny, melyre r(0, 0) = 0 es
|Q5(x1, x2)| ≤ r(x1, x2)(x21 + x2
2)2. (7.7)
A Ljapunov-fuggveny eloallıtasahoz a kovetkezoket fogjuk igazolni.
1. A P3 polinom valaszthato ugy, hogy Q3 = 0 legyen.
2. A P4 polinom valaszthato ugy, hogy Q4 definit legyen. (Bizonyos transzverzalitasifeltetel eseten.)
3. A Q5 tag becsulheto olyan modon, hogy Q4 + Q5 is definit az origo egy kornyeze-teben.
138

A bizonyıtas soran fontos szerepet jatszik a Tk : Hk → Hk
Tk(P ) = x2∂1P − x1∂2P
linearis lekepezes. Ennek segıtsegevel a fenti kepletek ıgy ırhatok.
Q3 = x1A2 + x2B2 + T3(P3),
Q4 = x1A3 + x2B3 + A2∂1P3 +B2∂2P3 + T4(P4).
Mivel a Hk ter azonosıthato az Rk+1 terrel, azert a Tk lekepezesnek egy (k + 1) × (k +1) meretu matrix felel meg, melyet az xk1, xk−1
1 x2, . . . , xk2 bazisban celszeru megadni.
Ekkor k = 3 es k = 4 eseten
T3 =
0 −1 0 03 0 −2 00 2 0 −10 0 1 0
, T4 =
0 −1 0 0 04 0 −2 0 00 3 0 −3 00 0 2 0 −40 0 0 1 0
.
Egyszeru szamolas mutatja, hogy detT3 6= 0, ıgy T3 izomorfizmus, tehat van olyanP3 ∈ H3, mellyel
T3(P3) = −x1A2 − x2B2, (7.8)
ezert Q3 = 0, mellyel a fenti 1. allıtast igazoltuk.A 2. allıtas igazolasahoz vezessuk be a c0, c1, . . . , c4 szamokat ugy, hogy
c0x41 + c1x
31x2 + c2x
21x
22 + c3x1x
32 + c4x
42 = x1A3 + x2B3 + A2∂1P3 +B2∂2P3 (7.9)
fennalljon. Megmutatjuk, hogy P4 megvalaszthato ugy, hogy
Q4(x1, x2) = K(x21 + x2
2)2
legyen, valamilyen K konstanssal. Ehhez eleg azt igazolni, hogy
K(1, 0, 2, 0, 1)T − (c0, c1, c2, c3, c4) ∈ ImT4.
A T4 lekepezes keptere azon vektorokbol all, melyek ortogonalisak a transzponalt mag-terere. A T4 matrixabol egyszeruen lathato, hogy magteret a (3, 0, 1, 0, 3)T vektor feszıtiki, ezert a fenti vektor akkor van benne a T4 keptereben, ha
0 = 3(K − c0) + 2K − c2 + 3(K − c4) = 8K − (3c0 + c2 + 3c4),
azaz K = 3c0+c2+3c48
.
139

A ci egyutthatok kiszamıtasahoz meg kell hatarozni a P3 polinom egyutthatoit. Ke-ressuk a polinomot
P3(x1, x2) = q0x31 + q1x
21x2 + q2x1x
22 + q3x
32
alakban. Valamint az A2 es B2 polinomok egyutthatoira vezessuk be az
A2(x1, x2) = a20x21 + a11x1x2 + a02x
22, B2(x1, x2) = b20x
21 + b11x1x2 + b02x
22 (7.10)
jeloleseket. Ekkor a P3 polinomot meghatarozo (7.8) egyenlet az ismeretlen qi egyuttha-tokra az alabbi egyenletet adja.
0 −1 0 03 0 −2 00 2 0 −10 0 1 0
q0
q1
q2
q3
=
a20
a11
a02
0
−
0b20
b11
b02
Ennek megoldasa
q0 = −1
3(2b02 + a11 + b20), q1 = a20
q1 = −b02, q3 =1
3(2a20 + b11 + a02).
Az A3 es B3 polinomok egyutthatoira vezessuk be az
A3(x1, x2) = a30x31 + a21x
21x2 + a12x1x
22 + a03x
32, (7.11)
B3(x1, x2) = b30x31 + b21x
21x2 + b12x1x
22 + b03x
32 (7.12)
jeloleseket. Ekkor a ci egyutthatokat meghatarozo (7.9) egyenletbol
c0 = 3q0a20 + q1b20 + a30,
c4 = 3q3b02 + q2a02 + b03,
c2 = 3q0a02 + 3q3b20 + 2q1a11 + 2q2b11 + q2a20 + q1b02 + a12 + b21.
Helyettesıtsuk be ezekbe az egyenletekbe a qi egyutthatok iment levezetett kepletet,ekkor egyszeru szamolas utan a 3c0 + c2 + 3c4 = L egyenlethez jutunk, ahol
L = 3a30 + 3b03 + a12 + b21 + 2a20b20 − 2a02b02 − a11(a20 + a02) + b11(b20 + b02) (7.13)
az ugynevezett Ljapunov-egyutthato. Ezzel tehat a 2. allıtast igazoltuk, ugyanisQ4(x1, x2) =L8(x2
1 + x22)2 definit, ha L 6= 0.
Terjunk ra most L 6= 0 eseten a 3. allıtas igazolasara. Ehhez a (7.7) egyenlotlensegetfogjuk alkalmazni. Valasszunk olyan ε > 0 szamot, mellyel |x| < ε eseten teljesul
140

|r(x)| < |L|16
. A bizonyıtast az L > 0 esetre mutatjuk meg, az L < 0 eset teljesen hasonlo.Ekkor tehat |x| < ε, x 6= 0 eseten
LfV (x) = Q4(x) +Q5(x) ≥ L
8(x2
1 + x22)2 − L
16(x2
1 + x22)2 =
L
16(x2
1 + x22)2 > 0.
Az eddigieket osszefoglalva az alabbi tetelt igazoltuk.
Tetel 7.5.. Tekintsuk a (7.4)-(7.5) rendszert, melyben az A2, B2 fuggvenyeket a (7.10)keplet, az A3, B3 fuggvenyeket a (7.11) es (7.12) keplet adja meg, az A4, B4 fuggvenyekrepedig fennall a (7.6) becsles. Legyen L a (7.13) egyenlettel megadott Ljapunov-egyutthato.Ekkor ha L < 0, akkor az origo aszimptotikusan stabilis, ha pedig L > 0, akkor az origoinstabilis.
A tetel bizonyıtasa most mar egyszeruen Ljapunov stabilitasi es instabilitasi tetelenekalkalmazasa a fent bevezetett Ljapunov-fuggvennyel.
Megjegyezzuk, hogy L = 0 eseten magasabb foku tagok segıtsegevel tovabbi Ljapunov-egyutthatok vezethetok be, es az origo stabilitasa ezek segıtsegevel dontheto el. SotLjapunov azt is igazolta, hogy amennyiben az osszes egyutthato nulla egy analitikusjobboldalu rendszerben, akkor az origo centrum, ezt nevezik Ljapunov centrum tetele-nek, lasd peldaul Chicone konyveben [7].
7.2.2. Andronov–Hopf-bifurkacio linearis parameterfugges ese-ten
Egeszıtsuk ki most a (7.4)-(7.5) rendszert a legegyszerubb parameterfuggessel, amely abifurkacio normalformajaban a (7.2)-(7.3) rendszerben szerepel, azaz tekintsuk az
x1 = λx1 + x2 + A2(x1, x2) + A3(x1, x2) + A4(x1, x2), (7.14)
x2 = −x1 + λx2 +B2(x1, x2) +B3(x1, x2) +B4(x1, x2) (7.15)
rendszert, melyben azA2, B2 fuggvenyeket a (7.10) keplet, azA3, B3 fuggvenyeket a (7.11)es (7.12) keplet adja meg, az A4, B4 fuggvenyekre pedig fennall a (7.6) becsles. Alkal-mazzuk a fent bevezetett
V (x1, x2) =1
2(x2
1 + x22) + P3(x1, x2) + P4(x1, x2)
Ljapunov-fuggvenyt. Ekkor a V fuggveny Lie-derivaltja, vagy rendszer szerinti derivaltja
LfV = ∂1V f1 + ∂2V f2
= (x1 + ∂1P3 + ∂1P4)(λx1 + x2 + A2 + A3 + A4)
+ (x2 + ∂2P3 + ∂2P4)(−x1 + λx2 +B2 +B3 +B4)
= λD +Q4 +Q5,
141

ahol a Q3 tagot azert nem ırtuk ki, mert a P3 polinomot ugy valasztottuk, mint az elobb,azert, hogy Q3 = 0 legyen, es
D(x1, x2) = x21 + x2
2 + x1(∂1P3 + ∂1P4) + x2(∂2P3 + ∂2P4).
Mivel a D masodfoku tagjai egy pozitıv definit kvadratikus alakot alkotnak, azert vanolyan ε > 0 szam, mellyel |x| < 2ε eseten D(x1, x2) > 0. Tegyuk fel, hogy ε erteket olyankicsire valasztottuk, hogy Q4 + Q5 is definit legyen az |x| < 2ε gombben. Tekintsuk azL < 0 esetet. Ekkor az |x| < 2ε gombben Q4(x) + Q5(x) < 0. Igy, ha λ < 0, akkor az|x| < 2ε gombben
LfV (x) = λD(x) +Q4(x) +Q5(x) < 0,
ezert az origo aszimptotikusan stabilis. Ha λ > 0, akkor a linearis resz miatt az origoinstabilis. Megmutatjuk, hogy megadhato olyan λ0 > 0, hogy minden λ ∈ (0, λ0) esetenaz origo korul van periodikus palya. Legyen
M = max|x|≤ε
D(x) > 0, es m = max|x|=ε
Q4(x) +Q5(x) < 0,
es legyen λ0 = −mM
. Ekkor |x| = ε es λ ∈ (0, λ0) eseten LfV (x) < λM + m < 0. Igyaz |x| = ε gombbol nem johetnek ki a palyak, es a belsejeben az egyetlen egyensulyipont az origo, ami instabil. Igy ez egy Bendixson-zsak, amely azt igazolja, hogy vanbenne egy stabil hatarciklus. Tehat azt igazoltuk, hogy λ = 0 eseten szuperkritikusAndronov–Hopf-bifurkacio kovetkezik be. Teljesen hasonloan igazolhato, hogy L > 0eseten a bifurkacio szubkritikus. Osszefoglalva, tehat az alabbi tetelt bizonyıtottuk.
Tetel 7.6.. Tekintsuk a (7.14)-(7.15) rendszert, melyben az A2, B2 fuggvenyeket a (7.10)keplet, az A3, B3 fuggvenyeket a (7.11) es (7.12) keplet adja meg, az A4, B4 fuggvenyekrepedig fennall a (7.6) becsles. Legyen L a (7.13) egyenlettel megadott Ljapunov-egyutthato.Ekkor ha L < 0, akkor λ = 0 eseten az origoban szuperkritikus Andronov–Hopf-bifurkaciokovetkezik be, ha pedig L > 0, akkor szubkritikus.
A tetel alkalmazasat a kovetkezo peldan szemleltetjuk.
Pelda 7.2. Vizsgaljuk meg, hogy az
x1 = λx1 + x2 + x21, (7.16)
x2 = −x1 + λx2 − x21 (7.17)
rendszerben bekovetkezik-e Andronov–Hopf-bifurkacio, es ha igen, akkor milyen tıpusu.A tetel szerint a kerdes megvalaszolasahoz az L Ljapunov-egyutthato erteket kell meg-hatarozni a (7.13) kepletbol. Esetunkben A2(x1, x2) = B2(x1, x2) = x2
1, A3(x1, x2) =B3(x1, x2) = 0 es A4(x1, x2) = B4(x1, x2) = 0. Ezert a (7.10) keplet szerint a20 =b20 = 1, valamint a (7.11) es (7.12) keplet szerint a tobbi egyutthato erteke nulla. Igy
142

L = 2a20b20 = −2, tehat a λ = 0 erteknel szuperkritikus Andronov–Hopf-bifurkacio ko-vetkezik be, azaz λ < 0 eseten az origo aszimptotikusan stabilis, λ > 0 eseten pediginstabilis es egy stabil hatarciklus van korulotte, amint a 7.2. Abran lathatjuk.
Andronov–Hopf-bifurkacio a 7.2. Peldaban szereplo rendszerben a λ = 0 erteknel. Abaloldali abra λ < 0, a jobboldali pedig λ > 0 eseten mutatja a faziskepet.
7.2.3. Andronov–Hopf-bifurkacio altalanos parameterfugges ese-ten Jordan-normalalaku linearis resszel
Altalanosıtsuk most a (7.14)-(7.15) rendszert olyan modon, hogy a linearis resz Jordan-normalalaku legyen, de az egyutthatok altalanosan fuggjenek a λ parametertol, azaztekintsuk az
x1 = α(λ)x1 + β(λ)x2 + A2(x1, x2) + A3(x1, x2) + A4(x1, x2), (7.18)
x2 = −β(λ)x1 + α(λ)x2 +B2(x1, x2) +B3(x1, x2) +B4(x1, x2) (7.19)
rendszert, melyben tovabbra is az A2, B2 fuggvenyeket a (7.10) keplet, az A3, B3 fugg-venyeket a (7.11) es (7.12) keplet adja meg, az A4, B4 fuggvenyekre pedig fennall a (7.6)becsles. Ahhoz, hogy a λ = 0 erteknel Andronov-Hopf-bifurkacio kovetkezzen be, alinearis reszben szereplo parameterfuggesrol az alabbiakat tesszuk fel.
α(0) = 0, α′(0) 6= 0, β(0) 6= 0. (7.20)
Ugyanis a linearis resz sajatertekei α(λ) + iβ(λ), ıgy amint λ erteke athalad a nullan,a sajatertekpar athalad a kepzetes tengelyen. Tehat ha peldaul α′(0) > 0, akkor λ < 0
143

eseten az origo aszimptotikusan stabilis, λ > 0 eseten pedig instabilis. A fent maralkalmazott Ljapunov-fuggveny segıtsegevel igazolni fogjuk, hogy az L elojeletol fuggoenvagy pozitıv, vagy negatıv λ eseten letezik az origo korul periodikus palya.
Alkalmazzuk tehat ismet a fent bevezetett
V (x1, x2) =1
2(x2
1 + x22) + P3(x1, x2) + P4(x1, x2)
Ljapunov-fuggvenyt. Ekkor a V fuggveny Lie-derivaltja, vagy rendszer szerinti derivaltja
LfV = ∂1V f1 + ∂2V f2
= (x1 + ∂1P3 + ∂1P4)(α(λ)x1 + β(λ)x2 + A2 + A3 + A4)
+ (x2 + ∂2P3 + ∂2P4)(−β(λ)x1 + α(λ)x2 +B2 +B3 +B4)
= α(λ)D +Q3 +Q4 +Q5,
ahol
D(x1, x2) = x21 + x2
2 + x1(∂1P3 + ∂1P4) + x2(∂2P3 + ∂2P4),
Q3 = x1A2 + x2B2 + β(λ)T3(P3),
Q4 = x1A3 + x2B3 + A2∂1P3 +B2∂2P3 + β(λ)T4(P4),
Q5 pedig a magasabb foku tagokat tartalmazza, es teljesıti a (7.7) egyenlotlenseget. Mivela D masodfoku tagjai egy pozitıv definit kvadratikus alakot alkotnak, azert van olyanε > 0 szam, mellyel |x| < 2ε eseten D(x1, x2) > 0. Feltehetjuk, hogy az ε > 0 szamot
olyan kicsire valasztottuk, hogy |x| < 2ε eseten teljesul |r(x)| < |L|16
, ıgy
|Q5(x1, x2)| ≤ L
16(x2
1 + x22)2. (7.21)
Mivel most β(λ) erteke valtozik a λ valtoztatasaval, azert nem erheto el, hogy Q3 = 0legyen barmely λ eseten. Viszont P3 valaszthato ugy, hogy β(0)T3(P3) = −(x1A2 +x2B2)igaz legyen. Ekkor
Q3 = (β(λ)− β(0))T3(P3). (7.22)
Hasonlo modon valasszuk ugy a P4 polinomot, hogy
x1A3 + x2B3 + A2∂1P3 +B2∂2P3 + β(0)T4(P4) =L
8(x2
1 + x22)2
fennalljon. Ekkor
Q4 = (β(λ)− β(0))T4(P4) +L
8(x2
1 + x22)2. (7.23)
Igazolni fogjuk, hogy az L < 0, α′(0) > 0 esetben megadhato olyan λ0 > 0, hogy mindenλ ∈ (0, λ0) eseten az origo korul van periodikus palya. Legyen
M = max|x|≤ε
D(x) > 0, es m = max|x|=ε|T3(P3)(x) + T4(P4)(x)|.
144

Ekkor a (7.22) es (7.23) kepletek alapjan |x| = ε es λ > 0 eseten
LfV (x) = α(λ)D(x) +Q3(x) +Q4(x) +Q5(x)
= α(λ)D(x) + (β(λ)− β(0))(T3(P3)(x) + T4(P4)(x)) +L
8(x2
1 + x22)2 +Q5(x)
≤ α(λ)M + |β(λ)− β(0)|m+L
16(x2
1 + x22)2,
ahol az utolso lepesben felhasznaltuk a (7.21) egyenlotlenseget. Az α es β fuggvenyekfolytonossaga miatt megadhato olyan λ0, hogy minden λ ∈ (0, λ0) eseten
α(λ)M + |β(λ)− β(0)|m <L
32ε4.
Igy |x| = ε es λ ∈ (0, λ0) eseten
LfV (x) <L
32ε4 < 0.
Igy az |x| = ε gombbol nem johetnek ki a palyak, es a belsejeben az egyetlen egyensulyipont az origo, ami instabil. Igy ez egy Bendixson-zsak, amely azt igazolja, hogy vanbenne egy stabil hatarciklus. Tehat azt igazoltuk, hogy λ = 0 eseten szuperkritikusAndronov–Hopf-bifurkacio kovetkezik be. Teljesen hasonloan igazolhato, hogy L > 0eseten a bifurkacio szubkritikus. Osszefoglalva tehat az alabbi tetelt bizonyıtottuk.
Tetel 7.7.. Tekintsuk a (7.18)-(7.19) rendszert, melyben az A2, B2 fuggvenyeket a (7.10)keplet, az A3, B3 fuggvenyeket a (7.11) es (7.12) keplet adja meg, az A4, B4 fuggvenyekrepedig fennall a (7.6) becsles. Tegyuk fel, hogy az α fuggveny differencialhato, a β fuggvenypedig folytonos es teljesulnek a (7.20) feltetelek. Legyen L a (7.13) egyenlettel megadottLjapunov-egyutthato. Ekkor ha L < 0, akkor λ = 0 eseten az origoban szuperkritikusAndronov–Hopf-bifurkacio kovetkezik be, ha pedig L > 0, akkor szubkritikus.
Megjegyzes 7.1. Megjegyezzuk, hogy a tetel altalanosıthato arra az esetre is, amikoraz Ai es Bi fuggvenyek folytonosan fuggenek a λ parametertol is. Ugyanis a Ljapunov-fuggvenyt a λ = 0 ertekhez konstrualjuk meg, es a folytonos fugges miatt LfV elojele kisλ eseten ugyanolyan, mint a λ = 0 ertekre.
7.2.4. Andronov–Hopf-bifurkacio tetszoleges parameterfuggeseseten
Tekintsunk most egy altalanos x = f(x, λ) ketdimenzios rendszert, melyben λ ∈ R aparameter es x(t) ∈ R2. Tegyuk fel, hogy egy λ0 parametererteknel az x0 egyensulyi pont,es ott a Jacobi-matrix sajatertekei tiszta kepzetesek, azaz f(x0, λ0) = 0 es ∂xf(x0, λ0)
145

sajatertekei ±iω. Ekkor az implicit fuggveny tetel szerint letezik δ > 0 es g : (λ0 −δ, λ0 + δ) → R2 differencialhato fuggveny, melyre g(λ0) = x0 es f(g(λ), λ) = 0 minden
λ ∈ (λ0 − δ, λ0 + δ) eseten. Vezessuk be az x = x − g(λ) uj valtozot, a λ = λ − λ0 uj
parametert es az f(x, λ) = f(x+ g(λ), λ+ λ0) uj jobboldalt. Ekkor
˙x = x = f(x, λ) = f(x, λ)
es∂xf(x0, λ0) = ∂xf(0, 0)
valamint f(0, λ) = 0 minden |λ| < δ ertekre.Egyszeruen lathato, hogy az eredeti x = f(x, λ) rendszerben a λ parametererteknel
pontosan akkor kovetkezik be Andronov–Hopf-bifurkacio a g(λ) pontban, ha a transzfor-
malt ˙x = f(x, λ) rendszerben Andronov–Hopf-bifurkacio van a λ = 0 parametererteknelaz origoban. Ezert elegendo csak olyan rendszereket vizsgalni, melyeknel a parame-tert valtoztatva az egyensulyi pont helye mindig az origo marad, valamint a bifurkaciosparameterertek nulla. Azaz felteheto, hogy f(0, λ)=0 minden λ eseten, es ∂xf(0, 0) sa-jatertekei tiszta kepzetesek. Tehat elegendo az
x = B(λ)x+ h(x, λ) (7.24)
alaku rendszerben vizsgalni a bifurkacio bekovetkezeset, melyben h(0) = 0 es h′(0) = 0.Ez a rendszer tovabb egyszerusıtheto a linearis resz Jordan-normalalakra transz-
formalasaval. Legyenek a B(λ) sajatertekei α(λ) ± iβ(λ), sajatvektorai pedig s(λ) =r(λ)± iq(λ). Vezessuk be a P = (r(λ), k(λ)) ∈ R2×2 matrixot, es legyen X = P−1 · x azuj ismeretlen fuggveny. Erre a differencialegyenlet
X = P−1 · x = P−1 · f(x, λ) = P−1 · f(PX, λ).
EkkorP−1 · f(PX, λ) = P−1B(λ)PX + P−1h(PX, λ).
LegyenA(λ) = P−1B(λ)P, es F (X,λ) = P−1h(PX, λ),
ahol P definıcioja miatt
A(λ) =
(α(λ) β(λ)−β(λ) α(λ)
)valamint F : R2 × R → R folytonosan differencialhato, es F (0, λ) = 0, ∂xF (0, λ) = 0 ∈R2×2. Ekkor a X fuggvenyre vonatkozo differencialegyenlet
X = A(λ)X + F (X,λ),
146

Tehat a X fuggveny koordinatai eppen a (7.18)-(7.19) rendszer megoldasai, megengedve,hogy az Ai es Bi fuggvenyek a λ parametertol is fuggjenek. Mivel ezt a rendszert a (7.24)rendszerbol linearis transzformacioval kaptuk, azert az utobbiban pontosan akkor ko-vetkezik be Andronov–Hopf-bifurkacio, amikor az elobbiben, amelyre vonatkozoan marmegadtuk az elegseges feltetelt a 7.7.. Tetelben. Az ott definialt Ljapunov-egyutthatotaz F fuggveny koordinatainak segıtsegevel is ki lehet fejezni, hiszen F1 = A2 + A3 + A4
es F2 = B2 +B3 +B4. Ekkor a Ljapunov-egyutthato
L =∂31F1 + ∂1∂
22F1 + ∂2
1∂2F2 + ∂32F2
+ ∂12F1 · (∂21F1 + +∂2
2F1)− ∂12F2 · (∂21F2 + ∂2
2F2)− ∂21F1 · ∂2
1F2 + ∂22F1 · ∂2
2F2,
ahol a parcialis derivaltakat a λ = 0 pontban es az origoban vesszuk, azaz peldaul∂3
1F1 a ∂31F1(0, 0) helyett all rovidseg kedveert. Igy a 7.7.. Tetel felhasznalasaval a fenti
levezetes elegseges feltetelt ad arra, hogy a (7.24) rendszerben Andronov–Hopf-bifurkaciokovetkezzen be.
Tetel 7.8.. Tekintsuk a (7.24) rendszert, melyben a B(λ) matrix sajatertekeit jeloljeα(λ) ± iβ(λ), sajatvektorait pedig s(λ) = r(λ) ± iq(λ). Tegyuk fel, hogy az α fuggvenydifferencialhato, a β fuggveny pedig folytonos es teljesulnek a (7.20) feltetelek. Jelolje Pazt a matrixot, melynek oszlopai az r(λ) es q(λ) vektorok, es vezessuk be az F (X,λ) =P−1h(PX, λ) fuggvenyt, valamint ennek (0, 0) pontban kiszamıtott parcialis derivaltjainaksegıtsegevel a fenti L Ljapunov-egyutthatot. Ekkor ha L < 0, akkor λ = 0 eseten azorigoban szuperkritikus Andronov–Hopf-bifurkacio kovetkezik be a (7.24) rendszerben, hapedig L > 0, akkor szubkritikus bifurkacio tortenik.
E tetel segıtsegevel, tehat egy altalanos ketdimenzios fazisteru rendszerben megha-tarozhato az Andronov–Hopf-bifurkacio. A tetel tetszoleges dimenzioju fazister esetenigazolhato a centralis sokasag redukcio alkalmazasaval. Ez az altalanos megfogalmazasmegtalalhato peldaul Kuznyecov konyveben [17].
7.2.5. Pelda az Andronov–Hopf-bifurkacio meghatarozasara
Az elobbi szakaszban lattuk, hogy az Andronov–Hopf-bifurkacio meghatarozasahoz arendszer tobbszori transzformacioja szukseges, es a bifurkacio tıpusat meghatarozo Lja-punov-egyutthatot csak a transzformalt rendszer segıtsegevel lehet kiszamıtani. Ebbena szakaszban a teljes levezetest bemutatjuk egy pelda segıtsegevel.
Tekintsuk a kovetkezo differencialegyenlet-rendszert:
x = x(x− x2 − y), (7.25)
y = y(x− a), (7.26)
147

melyben a ∈ R pozitıv parameter. Megjegyezzuk, hogy ez az egyenlet egy specialis kemiaireakciot (az ugynevezett Lotka–Volterra-autokatalator reakciot) leıro differencialegyenlet-rendszer. Az egyensulyi pontok: (0, 0), (1, 0) es (a, a− a2). Mivel a rendszer egy kemiaireakciot ır le, azert a faziskepet csak a pozitıv sıknegyedben vizsgaljuk, ıgy az utolsoegyensulyi pont csak a < 1 eseten relevans. A rendszer Jacobi-matrixa:(
2x− 3x2 − y −xy x− a
).
A (0, 0) elfajult egyensulyi pont, az (1, 0) pedig nyereg, ha a > 1 es stabil csomo, haa < 1. A tovabbiakban az (a, a − a2) egyensulyi pont korul vizsgaljuk a rendszert.Ebben a pontban a Jacobi-matrix (
a− 2a2 −aa− a2 0
).
Ha 12< a < 1, akkor ez a pont stabil; ha pedig 0 < a < 1
2, akkor instabil, ezert
a = 12
eseten lehet Andronov–Hopf-bifurkacio. Az alabbiakban azt igazoljuk, hogy ekkorszuperkritikus Andronov–Hopf-bifurkacio kovetkezik be.
Eloszor az egyensulyi pontot koordinata-transzformacioval az origoba, a bifurkaciosparametert pedig 0-ba toljuk. Azaz legyen ξ = x−a, η = y−L+L2 es λ = 1
2−a. Ekkor
x = ξ + L, y = η + L− L2 es a = 12− λ. A differencialegyenletekbol
x = ξ = ξ · λ(1− 2λ)− η(1
2− λ)− ξ · η + ξ2 · (3λ− 1
2)− ξ3
es
y = η = ξ(η +1
4− λ2).
Ezzel a rendszert a (7.24) kepletben adott alakra hoztuk, a (0, 0) pont egyensulyi pontminden λ eseten, es a linearis reszt megado matrix
B(λ) =
(λ(1− 2λ) λ− 1
214− λ2 0
).
A matrix nyoma Tr = λ(1− 2λ), ez λ = 0 eseten valt elojelet, ıgy ekkor varhato a bifur-kacio megjelenese. A 7.8.. Tetel alkalmazasahoz szuksegunk van a matrix sajatertekeirees sajatvektoraira. A sajatertekekre vonatkozo karakterisztikus egyenlet
µ(µ− λ(1− 2λ)) + (−λ+1
2)(
1
4− λ2) = 0,
Igy ezek
µ1,2 =λ(1− 2λ)±
√λ2(1− 2λ)2 − 4(1
2− λ)(1
4− λ2)
2.
148

A sajatertekek valos resze α(λ) = λ(12− λ), ıgy fennall α(0) = 0 es α′(0) = 1
26= 0. A
sajatertekek kepzetes resze
β(λ) =
√λ2(1− 2λ)2 − 4(1
2− λ)(1
4− λ2)
2,
ezert β(0) = 12√
26= 0. Tehat teljesulnek a (7.20) feltetelek. A λ = 0 ertekhez tartozo
matrix (0 −1
214
0
),
ennek sajatertekei ± 12√
2, sajatvektorai(
1−i 1√
2
)=
(10
)+ i
(0− 1√
2
).
Vezessuk be az u, v uj koordinatakat a(ξη
)(1 00 −1√
2
)(uv
)transzformacioval. Ekkor a λ = 0 ertekhez tartozo rendszer az eredeti koordinatakban
ξ = −1
2η − ξη − 1
2η2 − ξ3,
η =1
4ξ + ξη,
Az uj, u, v koordinatakban pedig
u =1√8v +
1√2uv − 1
2u2 − u3,
v =− 1√8u+ uv.
Ebben a linearis resz mar Jordan-normalalaku, a nemlinearis resz pedig az F fuggveny,azaz
F (u, v) =
( 1√2uv − 1
2u2 − u3
uv
)A Ljapunov-egyutthato kiszamıtasahoz szuksegunk lesz az alabbi parcialis derival-
takra.
∂1F1 =1√2v − u− 3u2, ∂2
1F1 = −1− 6u, ∂31F1 = −6,
149

∂2F1 =1√2, ∂2
2F1 = 0, ∂12F1 =1√2, ∂1F2 = v, ∂2F2 = u.
Ezeket az (u, v) = (0, 0) pontban veve, es ertekeiket behelyettesıtve az L kepletebe, azL = −1/4 erteket kapjuk, tehat szuperkritikus Andronov–Hopf-bifurkacio kovetkezik be.Az eredeti (7.25)-(7.26) rendszerben az a = 1/2 erteknel tortenik a bifurkacio. A 7.2.5.abran lathatjuk, hogy a > 1/2 eseten az (a, a − a2) egyensulyi pont stabilis, a < 1/2eseten pedig instabilis, es egy stabil hatarciklus van korulotte.
Andronov–Hopf-bifurkacio a (7.25)-(7.26) rendszerben az a = 1/2 erteknel. A balol-dali abra a < 1/2, a jobboldali pedig a > 1/2 eseten mutatja a faziskepet.
7.3. Egy kodimenzios bifurkacios gorbek meghataro-
zasa ketparameteres rendszerekben a paramet-
rikus reprezentacio modszerevel
7.3.1. A parametrikus reprezentacio modszere
Amikor ket parametert tartalmazo rendszerekben szeretnenk egy kodimenzios bifurka-ciok gorbeit meghatarozni, akkor gyakran kell megoldani
f(x, u1, u2) = 0
150

tıpusu egyenletet, melyben x a keresett ismeretlen, u1 es u2 pedig adott parameterek.Ebben a szakaszban megmutatjuk, hogy amennyiben a fuggveny a parameterektol line-arisan fugg, akkor a parametrikus reprezentacio modszere hatekony eszkoz a bifurkaciosgorbe meghatarozasara. Tegyuk fel tehat, hogy
f(x, u1, u2) = f0(x) + f1(x)u1 + f2(x)u2,
ahol fi : R→ R folytonosan differencialhato fuggvenyek.
Definıcio 7.9.. Adott u ∈ R2 eseten jelolje N(u) az f(x, u1, u2) = 0 egyenlet megolda-sainak szamat, amely lehet vegtelen is, azaz
N(u) := |x ∈ R : f(x, u) = 0|.
Egy parameterpart akkor nevezunk bifurkaciosnak, ha a kornyezeteben a megoldasokszama nem allando.
Definıcio 7.10.. Az u0 ∈ R2 parameter regularis, ha van olyan U ⊂ R2 kornyezete,hogy minden u ∈ U eseten N(u) = N(u0), azaz egy kornyezetben a megoldasok szamanem valtozik.
Az u0 ∈ R2 bifurkacios parameterertek, ha nem regularis.A bifurkacios parameterertekek halmazat bifurkacios halmaznak nevezzuk es B-vel
jeloljuk.
Az implicit fuggveny tetel miatt az f(x, u1, u2) = 0 egyenletbol kifejezheto x a para-meterek segıtsegevel olyan pontok kornyezeteben, ahol ∂xf nem nulla. Ezert a megolda-sok szama akkor valtozhat, ha f(x, u1, u2) = 0 mellett ∂xf(x, u1, u2) = 0 is fennall. Ezenfeltetelt teljesıto pontok alkotjak a szingularitasi halmazt.
Definıcio 7.11.. Az f(x, u1, u2) = 0 egyenlethez tartozo szingularitasi halmaz legyen
S := u ∈ R2 : ∃ x ∈ R : f(x, u) = 0 es ∂xf(x, u) = 0.
A tovabbiakban azt vizsgaljuk, hogy adott u ∈ R2 eseten hogyan lehet meghataroznia megoldasok szamat es erteket, illetve, hogy mi a bifurkacios B halmaz kapcsolata azS szingularitasi halmazzal.
Ha az f fuggveny linearisan fugg az u1 es u2 parameterektol, akkor a szingularitasihalmazt az
f0(x) + f1(x)u1 + f2(x)u2 = 0,
f ′0(x) + f ′1(x)u1 + f ′2(x)u2 = 0
egyenletrendszer hatarozza meg. A parametrikus reprezentacio lenyege abban all, hogyebben a rendszerben az x ismeretlent tekintjuk parameternek es az u1, u2 parametereket
151

fejezzuk ki, hiszen ez egy linearis rendszer megoldasaval elerheto. Az egyszeruseg kedve-ert a modszert egy fontos specialis esetben ismertetjuk, amelyben f1(x) = 1, f2(x) = x.Az f0 fuggvenyt ekkor g fogja jelolni. Ekkor a szingularitasi halmazt az
u1 + u2x+ g(x) = 0,
u2 + g′(x) = 0.
egyenletrendszer hatarozza meg. Fejezzuk ki ebbol az u1, u2 parametereket az x segıtse-gevel, ekkor
u1 = xg′(x)− g(x),
u2 = −g′(x).
Vezessuk be azt a D : R → R2 gorbet, amely egy x ertekhez hozzarendeli az (u1, u2)part, azaz
D1(x) = xg′(x)− g(x), D2(x) = −g′(x).
Ezt a gorbet, amely egyben a szingularitasi halmazt egy x valtozoval parameterezettgorbekent allıtja elo, diszkriminans gorbenek nevezik.
Szamunkra elsosorban az erdekes, hogy adott u1 es u2 eseten mi az egyenlet megoldasax-re. Vezessuk be ezert az
M(x) = (u1, u2) ∈ R2 : f0(x) + f1(x)u1 + f2(x)u2 = 0
halmazt, amely tehat azon parameterparokat tartalmazza, amelyek mellett az x megol-dasa az egyenletnek. A linearis parameterfugges miatt ez a halmaz egy egyenes a pa-rametersıkon. A parametrikus reprezentacio modszerenek egyik legfontosabb eredmenyeaz alabbi erinto tulajdonsag .
Allıtas 7.3 (Erinto tulajdonsag). Az M(x) egyenes erinti a diszkriminans gorbet azx parameteru D(x) pontban.
Bizonyıtas. Mivel az (u1, u2) = D(x) par megoldasa az f(x, u1, u2) = 0 egyenletnek,azert D(x) ∈ M(x), azaz a D(x) pont rajta van az M(x) egyenesen. Ezert mar csakazt kell megmutatni, hogy a D′(x) erintovektor meroleges az M(x) egyenes normalvek-torara, amely az (f1(x), f2(x)) vektor. Ezt egyszeruen igazolhatjuk tetszoleges fi fugg-venyek valasztasa mellett. Ugyanis az (u1, u2) = D(x) par megoldasa az f(x, u1, u2) = 0egyenletnek, azaz
f0(x) + f1(x)D1(x) + f2(x)D2(x) = 0
fennall minden x eseten. Ezert derivalhatjuk ezt az egyenletet, amellyel az
f ′0(x) + f ′1(x)D1(x) + f ′2(x)D2(x) + f1(x)D′1(x) + f2(x)D′2(x) = 0
152

egyenlethez jutunk. Ebben f ′0(x) + f ′1(x)D1(x) + f ′2(x)D2(x) = 0, hiszen az (u1, u2) =D(x) par megoldasa a ∂xf(x, u1, u2) = 0 egyenletnek is, ıgy
f1(x)D′1(x) + f2(x)D′2(x) = 0,
ami eppen a ket vektor merolegesseget bizonyıtja.
Megjegyzes 7.2. Megjegyezzuk, hogy az erinto tulajdonsag azt az altalanos tenyt fejeziki, mely szerint az f(x, u1, u2) = 0 egyenlet megoldasait kepezo M(x) halmazok burkolojaa szingularitasi halmaz.
Linearis parameterfugges eseten tehat az erinto tulajdonsag egyszeru geometriai mod-szert ad az f0(x) + f1(x)u1 + f2(x)u2 = 0 egyenlet x megoldasanak megkeresesere adottu1 es u2 eseten. Nevezetesen adott (u1, u2) eseten x pontosan akkor megoldasa azf0(x) + f1(x)u1 + f2(x)u2 = 0 egyenletnek, ha (u1, u2) rajta van a D gorbe x parameterupontjahoz huzott erintojen.
A modszer alkalmazasat nehany egyszeru peldan szemleltetjuk.
Pelda 7.3. Legyen f1(x) = 1, f2(x) = x, f0(x) = g(x) = x2, azaz tekintsuk az x2+u2x+u1 = 0 masodfoku egyenletet. Ekkor D1(x) = x2, D2(x) = −2x. Vegyuk eszre, hogy D1 =D2
2/4, ezert a D diszkriminans gorbe egy parabola az (u1, u2) parametersıkon, melynekegyenlete 4u1 = u2
2, amely eppen a vizsgalt masodfoku egyenlet diszkriminansa. Egytetszoleges (u1, u2) eseten x pontosan akkor megoldasa az x2 + u2x+ u1 = 0 egyenletnek,ha (u1, u2) rajta van a D gorbe x parameteru pontjahoz huzott erintojen. Ezt mutatjaa 7.3. abra, melyen a D gorbe parameterezesenek iranya is lathato. A D(0) pont aparabola csucspontja, a negatıv x ertekek a felso aghoz, a pozitıv x ertekek az also aghoztartoznak. Egyszeruen leolvashato az abrabol, hogy a parabola bal oldalan fekvo reszminden pontjabol ket erinto huzhato a gorbehez, a belso reszbol viszont nem huzhatoerinto, azaz 4u1 < u2
2 eseten ket megoldasa van az egyenletnek, 4u1 > u22 eseten viszont
nincs megoldasa. Az abran levo szamok az adott tartomanybol valasztott parameterpareseten az egyenlet megoldasainak szamat mutatjak. Ezenkıvul azt is leolvashatjuk peldaulaz abrabol, hogy a bal felsıkbol mindig ket erinto huzhato a gorbehez, egy a felso aghoz,egy pedig az also aghoz. Ez a geometriai teny algebrailag azt fejezi ki, hogy u1 < 0eseten az x2 + u2x+ u1 = 0 masodfoku egyenletnek egy pozitıv es egy negatıv gyoke van.Egy masik egyszeru geometriai teny, miszerint az u1, u2 > 0 pozitıv negyedbol csak afelso aghoz huzhato erinto, azt fejezi ki algebrai szempontbol, hogy u1, u2 > 0 eseten azx2 + u2x+ u1 = 0 egyenletnek csak negatıv gyokei lehetnek.
Pelda 7.4. Legyen f1(x) = 1, f2(x) = x, f0(x) = g(x) = x3, azaz tekintsuk az x3+u2x+u1 = 0 harmadfoku egyenletet. Ekkor D1(x) = 2x3, D2(x) = −3x2. Vegyuk eszre, hogy27D2
1 = −4D32, ezert a D diszkriminans gorbe az also felsıkban halad, erinti az origoban
a fuggoleges tengelyt, es ugynevezett csucsponttal (cusp) rendelkezik. Egyenlete 27u21 +
153

7.3. abra. Az (u1, u2) pontbol az x2 + u2x + u1 = 0 masodfoku egyenlet diszkriminansgorbejehez huzott ket erinto az x1 es x2 parameteru pontokban erinti a gorbet. Ezekadjak az egyenlet megoldasait.
4u32 = 0, amely eppen a vizsgalt harmadfoku egyenlet diszkriminansa. Egy tetszoleges
(u1, u2) eseten x pontosan akkor megoldasa az x3 + u2x+ u1 = 0 egyenletnek, ha (u1, u2)rajta van a D gorbe x parameteru pontjahoz huzott erintojen. Ezt mutatja a 7.4. abra,melyen a D gorbe parameterezesenek iranya is lathato. A D(0) pont a gorbe csucspontja,a negatıv x ertekek a baloldali aghoz, a pozitıv x ertekek a jobboldali aghoz tartoznak.Egyszeruen leolvashato az abrabol, hogy a ket ag kozotti resz minden pontjabol haromerinto huzhato a gorbehez, a kulso reszbol viszont csak egy erinto. Az abran levo szamokaz adott tartomanybol valasztott parameterpar eseten az egyenlet megoldasainak szamatmutatjak. Itt is megfigyelheto az az egyszeru geometriai teny, miszerint az u1, u2 >0 pozitıv negyedbol csak a baloldali aghoz huzhato erinto, amely azt fejezi ki algebraiszempontbol, hogy u1, u2 > 0 eseten az x3 +u2x+u1 = 0 egyenletnek csak egy valos gyokelehet, es az negatıv.
Megjegyezzuk, hogy igazolhato, hogy a diszkriminans gorbe konvex ıvekbol all, es egyilyenhez huzhato erintok szama egyszeruen meghatarozhato, amint a 7.5. Abra mutatja.Ezt a geometriai eredmenyt hasznaljuk fel a kovetkezo peldaban szereplo negyedfokuegyenlet eseteben a megoldasok szamanak meghatarozasara.
Pelda 7.5. Legyen f1(x) = 1, f2(x) = x, f0(x) = g(x) = −x2 + x4, azaz tekintsukaz u1 + u2x − x2 + x4 = 0 negyedfoku egyenletet. Ekkor D1(x) = 3x4 − x2, D2(x) =
154

7.4. abra. Az x3 + u2x+ u1 = 0 harmadfoku egyenletet diszkriminans gorbeje ket reszreosztja a parametersıkot a megoldasok szama szerint. A ket ag kozotti reszben levoparameterparok eseten harom megoldasa van az egyenletnek, a kulso reszben levo para-meterparok eseten viszont csak egy.
7.5. abra. Egy konvex ıvhez huzhato erintok szama a sık kulonbozo pontjaibol.
155

2x − 4x3. Ezeket a fuggvenyeket abrazolva egyszeruen vazolhatjuk a D gorbe menetetaz (u1, u2) parametersıkon. A gorbe ket csucsponttal (cusp) rendelkezik, amint a 7.6.abra mutatja. Egyszeruen leolvashato az abrabol, hogy az ugynevezett ”fecskefarok” belsoreszeben fekvo minden pontbol negy erinto huzhato a gorbehez, a kulso pontokbol keterinto, a tobbibol pedig nem huzhato erinto. Az abran levo szamok az adott tartomanybolvalasztott parameterpar eseten az egyenlet megoldasainak szamat (azaz az onnan huzhatoerintok szamat) mutatjak.
7.6. abra. Az x4−x2 +u2x+u1 = 0 negyedfoku egyenletet diszkriminans gorbeje haromreszre osztja a parametersıkot a megoldasok szama szerint. A szamok az adott tarto-manybol valasztott parameterpar eseten az egyenlet megoldasainak szamat mutatjak.
7.3.2. Bifurkacios gorbek ketparameteres rendszerekben
Ebben a szakaszban x(t) = f(x(t), u1, u2) alaku rendszerek nyereg-csomo es Andronov-Hopf-bifurkacios gorbeinek meghatarozasat mutatjuk be peldakon, melyekben a fazisterketdimenzios, azaz x(t) ∈ R2, valamint u1 es u2 valos parameterek. A vizsgalat celjaaz (u1, u2) parametersık felosztasa az egyensulyi pontok szama es tıpusa szerint. A bi-furkacios gorbek meghatarozasara alkalmazni fogjuk a parametrikus reprezentacio elozoszakaszban ismertetett modszeret. A ket bifurkacios gorbe abrazolasa soran latni fog-juk, hogy ahol erintik egymast, abban a pontban egy ket kodimenzios bifurkacio, azugynevezett Takens–Bogdanov-bifurkacio jelenik meg.
156

Tekintsuk eloszor a kovetkezo rendszert:
x = y, (7.27)
y = u1 + u2 · x+ x2 + x · y. (7.28)
Az egyensulyi pontokra fennallnak a
0 = y,
0 = u1 + u2x+ x2 + x · 0.
egyenletek. Az egyensulyi pontokat tehat egyetlen egyenlet, az f(x, u) := u1 +u2x+x2 =0 masodfoku egyenlet hatarozza meg. Ilyen tıpusu egyenletek megoldasanak szamat aparametrikus reprezentacioval vizsgaltuk. A szingularitasi halmazt az f(x, u) = 0 es∂xf(x, u) = 0, azaz az
u1 + u2x+ x2 = 0
u2 + 2x = 0
rendszer adja meg. Ebbol az u1, u2 parametereket kifejezve kapjuk a diszkriminans gor-bet, mely esetunkben egy parabola
u2 = D2(x) =− 2x,
u1 = D1(x) =x2,
amint a 7.3.2. abra mutatja.A nyereg-csomo es Andronov-Hopf-bifurkacios gorbe a (7.27)-(7.28) rendszerben.Adott (u1, u2) part valasztva az (u1, u2) pontbol a diszkriminans gorbehez huzott
erintok szama megegyezik az (u1, u2) parameterparhoz tartozo x megoldasok szamaval.Tehat a parabola bal oldalan fekvo parameterparok valasztasa eseten ket egyensulyipont van, a jobb oldali tartomanybol valasztott parameterparok eseten viszont nincsegyensulyi pont. A diszkriminans gorbe tehat a nyereg-csomo bifurkacio gorbeje, melyenathaladva kettovel valtozik az egyensulyi pontok szama.
Hatarozzuk meg most az Andronov-Hopf-bifurkacio gorbejet. A rendszer Jacobi-matrixa egy (x, y) pontban (
0 1u2 + 2x+ y x
).
Ennek nyoma Tr = x, determinansa Det = −(u2 + 2x + y). Legyen x ∈ R tetszoleges,ekkor a Jacobi-matrix nyoma az (x, 0) egyensulyi pontban Tr = x, determinansa pedigDet = −(u2 + 2x). Egyszeruen lathato, hogy az Andronov-Hopf-bifurkacio szuksegesfeltetele, hogy Tr = 0 es Det > 0 legyen, hiszen ekkor a Jacobi-matrixnak ket kepzetesgyoke van. Bar ez a feltetel nem elegseges, megis az ezek altal meghatarozott gorbet
157

nevezik az Andronov-Hopf-bifurkacio gorbejenek. (Megjegyezzuk, hogy ezen gorbe egyespontjaiban a Ljapunov-egyutthato erteke nulla lehet, de a tipikus pontokban nem zerus,ezert azokban valoban bekovetkezik a bifurkacio. Az elfajult pontok meghatarozasavalitt nem fogunk foglalkozni.) Az Andronov-Hopf-bifurkacio gorbeje tehat azon (u1, u2)parameterparokbol all, melyekhez van olyan (x, 0) egyensulyi pont, melyben Tr = x = 0es Det = −(u2 + 2x) > 0. Azaz a kovetkezoknek kell teljesulnie
u1 + u2x+ x2 = 0, x = 0, u2 + 2x < 0.
Ezekbol u1 = 0 es u2 < 0, tehat az Andronov-Hopf-bifurkacio gorbeje a fuggoleges koor-dinatatengely negatıv resze. Ez az origoban erinti a nyereg-csomo bifurkacio gorbejet, aparabolat, ez a pont a Takens–Bogdanov-bifurkacios pont.
A kovetkezo pelda a Takens–Bogdanov-bifurkacio (egyik) normalformaja.
x = y,
y = u1 + u2 · y + x2 + x · y.
Az egyensulyi pontokra fennallnak a
0 = y,
0 = u1 + x2.
egyenletek. Az egyensulyi pontokat tehat egyetlen egyenlet, az u1 + x2 = 0 masodfokuegyenlet hatarozza meg. A szingularitasi halmazt az f(x, u) = 0 es ∂xf(x, u) = 0, azaz
158

az
u1 + x2 = 0,
2x = 0.
rendszer adja meg. Lathato, hogy a parametrikus reprezentacio modszere nem alkalmaz-hato, hiszen a rendszerbol (u1, u2) nem fejezheto ki. Viszont az egyenletekbol a szingu-laritasi halmazra x = 0 miatt u1 = 0, ıgy a szingularitasi halmaz, azaz a nyereg-csomobifurkacio gorbeje az u1 = 0 tengely, azaz a fuggoleges tengely.
Hatarozzuk meg most az Andronov-Hopf-bifurkacio gorbejet. A rendszer Jacobi-matrixa egy (x, y) pontban (
0 12x+ y u2 + x
).
Ennek nyoma egy (x, 0) egyensulyi pontban, x2 = −u1 miatt, Tr = u2 +x = u2 +√−u1,
determinansa Det = −2x. Tehat az u2 +√−u1 = 0 parabola az Andronov-Hopf-
bifurkacio gorbeje. Ez az origoban erinti a fuggoleges egyenest, a nyereg-csomo bifurka-cio gorbejet, ıgy az origo a Takens–Bogdanov-bifurkacios pont. Megjegyezzuk, hogy aTakens–Bogdanov-bifurkacio fontos eleme egy homoklinikus bifurkacio soran megjelenoperiodikus palya, melyet egy megfelelo Ljapunov-fuggveny segıtsegevel lehet megtalalni.Ennek targyalasa meghaladja a jegyzet kereteit, az erdeklodo Olvasonak ajanljuk Perkokonyvenek [19] 4.13. fejezetet.Feladat
Vizsgaljuk meg, hogy az a ∈ R parametert valtoztatva az
x = x− y,y = u1 + u2 · y + a · x · y2.
rendszerben, hogyan valtozik az (u1, u2) parametersıkon a nyereg-csomo es Andronov–Hopf-bifurkacio gorbeje.
159

8. fejezet
Diszkret dinamikai rendszerek,szimbolikus dinamika, kaotikusviselkedes
8.1. Diszkret dinamikai rendszerek
Legyen M ⊂ Rk tartomany (azaz osszefuggo es nyılt halmaz), es legyen f : M → Mdiffeomorfizmus (azaz bijekcio, amely inverzevel egyutt differencialhato). Jelolje fn =f f . . . f az n tagu kompozıciot, azaz fn(p) = f(f(. . . f(p) . . .)). Ha n < 0, akkorlegyen fn = (f−1)−n, ahol a kompozıcioban f inverzet alkalmazzuk (−n)-szer. Ekkor aϕ(n, p) = fn(p), ϕ : Z×M → M fuggveny egy diszkret dinamikai rendszert definial. Adiszkret dinamikai rendszer megadasa tehat egyenerteku az f lekepezes megadasaval. Arendszert gyakran egy rekurzıv sorozatkent adjak meg az
xn+1 = f(xn), x0 = p
alakban. Ekkor ϕ(n, p) = xn. A rendszer p pontbol indulo palyaja a ϕ(n, p) : n ∈ Zdiszkret ponthalmaz, vagy mindket iranyban vegtelen sorozat.
Definıcio 8.1.. Egy p ∈ M pont fixpontja a dinamikai rendszernek, ha f(p) = p, azazϕ(n, p) = p minden n ∈ Z szamra, vagyis a p palyaja egy pontbol all.
A stabilitasi fogalmakat a folytonos rendszerekkel teljesen analog modon definialjuk.
Definıcio 8.2.. Egy p ∈M fixpont stabilis, ha minden ε > 0 szamhoz van olyan δ pozitıvszam, hogy |q − p| < δ eseten fennall |ϕ(n, q)− p| < ε minden n ∈ N szamra.
A p fixpont aszimptotikusan stabilis, ha stabilis es limn→∞
ϕ(n, p) = p.
A p pont instabilis, ha nem stabilis.
160

Ezen fogalmak szemleltetesere nezzunk nehany peldat egydimenzios fazister eseten.
Pelda 8.1. Adott a ∈ R eseten legyenf(x) = ax, x0 = p. Ha a = 2, azaz f(x) = 2x,akkor ϕ(n, p) = 2np, amely vegtelenhez tart n→∞ eseten. Igy a rendszer fixpontja, a 0pont instabilis.
Ha a = −1, azaz f(x) = −x, akkor ϕ(n, p) = (−1)np, ıgy minden pont palyaja 2pontbol all (mivel xn+2 = xn). Az ilyen palyakat 2-periodikus palyaknak fogjuk nevezni.Ekkor a rendszer fixpontja, a 0 pont stabilis, de nem aszimptotikusan stabilis.
Ha a = 1/2, azaz f(x) = x/2, akkor ϕ(n, p) = (1/2)np, azaz minden pont palyajanullahoz tart n → ∞ eseten. Ekkor a rendszer fixpontja, a 0 pont aszimptotikusanstabilis.
Altalanosan megfogalmazva, az f(x) = a · x lekepezessel definialt dinamikai rendszer-nek az x = 0 pont fixpontja. Ez aszimptotikusan stabil, ha |a| < 1, ugyanis ϕ(n, p) =an · p→ 0, ha |a| < 1. A nulla pont instabilis, ha |a| > 1, es stabilis, de nem aszimpto-tikusan stabilis, ha |a| = 1.
Szinten a folytonos ideju rendszerekhez hasonloan a fixpont stabilitasat linearizalassallehet eldonteni a hiperbolikus esetben. Ezt fogalmazzuk meg egydimenzios fazisterurendszerre az alabbi tetelben.
Tetel 8.3.. Legyen f : R → R differencialhato, es legyen az xn+1 = f(xn) rekurziovaldefinialt diszkret dinamikai rendszer fixpontja p, azaz f(p) = p. Ha |f ′(p)| < 1, akkor paszimptotikusan stabilis, ha pedig |f ′(p)| > 1, akkor p instabilis.
Bizonyıtas. Mivel limx→p
f(x)−f(p)x−p = f ′(p), azert van olyan ε > 0 es a < 1, hogy barmely
x ∈ (p−ε, p+ε) eseten |f(x)−f(p)x−p | < a, azaz |f(x)−f(p)| < a · |x−p|, vagyis |f(x)−p| <
a · |x − p|. Igy x ∈ (p − ε, p + ε) eseten f(x) ∈ (p − ε, p + ε), es |f 2(x) − f 2(p)| <a · |f(x)−f(p)| < a2 · |x−p|. A gondolatmenetet folytatva, indukcioval azt kapjuk, hogy
|fk(x)− fk(p)| < ak · |x− p| → 0,
ha k →∞. Ez pedig azt jelenti, hogy a fixpont kozelebol indulo megoldasok nem tavo-lodnak el tole, es a fixponthoz tartanak, ha k vegtelenhez tart, azaz a fixpont aszimpto-tikusan stabilis. Az instabilitas az |f ′(p)| > 1 esetben hasonloan igazolhato.
Definıcio 8.4.. Egy p ∈ M pontot periodikus pontnak nevezunk, ha van olyan k > 1,hogy fk(p) = p, es p nem fixpont. A legkisebb ilyen k > 1 a p pont periodusa. A p pontpalyaja a p, f(p), f 2(p), . . . , fk−1(p) ponthalmaz, ezt k-periodikus palyanak nevezzuk.
Vegyuk eszre, hogy fk(p) = p azt jelenti, hogy p fixpontja az fk lekepezesnek. Ezeneszrevetel alapjan definialjuk a periodikus palya stabilitasat.
161

Definıcio 8.5.. A p pontbol indulo k-periodikus palya (aszimptotikusan) stabilis, ha p(aszimptotikusan) stabilis fixpontja az fk lekepezesnek. Hasonloan definialjuk a periodi-kus palya instabilitasat.
A fenti tetel szerint a periodikus palya stabilitasvizsgalatahoz az (fk)′ lekepezes sa-jatertekeit kell meghataroznunk. Vegyuk eszre, hogy (f 2)′(p) = f ′(f(p))f ′(p) az ossze-tett fuggveny derivalasi szabalya szerint. Hasonloan kapjuk, hogy (f 3)′(p) = f ′(f 2(p)) ·f ′(f(p))·f ′(p). Egy k-periodikus palya pontjaira bevezetve a p1 = p, p2 = f(p1), . . . , pk =fk−1(p1) jelolest, indukcioval azt kapjuk, hogy
(fk)′(p) = f ′(pk) · f ′(pk−1) · . . . · f ′(p1).
Igy a fenti tetelbol az alabbi kovetkezik a periodikus palya stabilitasara.
Tetel 8.6.. Legyen f : R → R differencialhato, es legyen az xn+1 = f(xn) rekurzi-oval definialt diszkret dinamikai rendszer k-periodikus pontja p, azaz fk(p) = p. Ap1, p2, . . . , pk, k-periodikus palya aszimptotikusan stabilis, ha |f ′(p1) · . . . · f ′(pk)| < 1.
8.1.1. A logisztikus lekepezes
A fent bevezetett fogalmakat erdemes megvizsgalni a logisztikus lekepezes peldajan.Ezenkıvul ez a lekepezes a kaotikus palya fogalmahoz is elvezet majd bennunket.
A logisztikus lekepezes az f(x) = ax(1− x) fuggveny, amelyet a [0, 1] intervallumonfogunk vizsgalni. Ezert az a ∈ R parameterrol mindig feltesszuk, hogy 0 < a ≤ 4, akkorugyanis a lekepezes a [0, 1] intervallumot onmagaba kepezi.
A lekepezes fixpontjai, az ax(1− x) = x egyenlet megoldasai: 0 es 1− 1a. Ez utobbi
termeszetesen csak a > 1 eseten van a vizsgalt intervallumban.A tovabbiakban azt vizsgaljuk, hogy az a ∈ [0, 4] parametert valtoztatva, hogyan
valtozik a palyak viselkedese.Hatarozzuk meg ehhez eloszor a fixpontok stabilitasat. A lekepezes derivaltja f ′(x) =
a − 2ax, ıgy f ′(0) = a, es f ′( 1a) = 2 − a. A fixpont stabilitasat az |f ′(p)| < 1 feltetel
biztosıtja, ezert 0 < a < 1 eseten a 0 pont aszimptotikusan stabilis, es 1 < a < 3eseten az 1
apont aszimptotikusan stabilis. Igazolhato, hogy ezek ilyenkor globalisan is
aszimptotikusan stabilisak a [0, 1] intervallumra vonatkozoan.
Allıtas 8.1. 1. Ha 0 < a < 1, akkor barmely x0 ∈ [0, 1] kezdeti pontbol indulo palyaa 0 ponthoz tart, azaz az xn+1 = axn(1− xn) sorozatra xn → 0, amint n→∞.
2. Ha 1 < a < 3, akkor barmely x0 ∈ (0, 1) kezdeti pontbol indulo palya az 1 − 1a
ponthoz tart, azaz az xn+1 = axn(1− xn) sorozatra xn → 1− 1a, amint n→∞.
Termeszetes kerdes, hogy a erteket tovabb novelve, azaz a > 3 eseten hogyan alakula sorozat aszimptotikus viselkedese. Numerikus kıserletek azt mutatjak, hogy ekkor 2-periodikus palya jelenik meg, es ez veszi at a vonzast. Szamıtsuk ki a 2-periodikus palyat.
162

Ennek pontjait x0 es x1-gyel jelolve, fennallnak az x1 = ax0(1− x0) es x0 = ax1(1− x1)egyenletek, azaz
x0 = a2x0(1− x0)(1− ax0(1− x0)).
Egyszeruen lathato, hogy ezen negyedfoku egyenletnek megoldasa az x0 = 0 es x0 = 1a,
hiszen a fixpontok is 2-periodikusak. Ezen gyokokre vonatkozo gyoktenyezoket kiemelveegy masodfoku egyenlethez jutunk, melynek x1 es x2 megoldasai egyszeruen kiszamol-hatok. Azt kapjuk, hogy ezek pontosan akkor valosak, ha a > 3, azaz a 2-periodikusmegoldasok pontosan akkor szuletnek meg, amikor az x0 = 1
afixpont elveszıti a stabi-
litasat. Hatarozzuk meg a 2-periodikus palya stabilitasat. Ehhez az |f ′(x1)f ′(x2)| < 1feltetelnek kell teljesulnie, amelyrol elemi, de faradsagos szamolassal kiderul, hogy a3 < a < 1 +
√6 feltetellel ekvivalens. Ezzel tehat a kovetkezot igazoltuk.
Allıtas 8.2. 1. Ha a > 3, akkor letezik 2-periodikus palya, azaz leteznek olyan x0, x1 ∈[0, 1] szamok, amelyek teljesıtik az x1 = ax0(1−x0) es x0 = ax1(1−x1) egyenleteket.
2. Ha 3 < a < 1 +√
6, akkor a 2-periodikus palya aszimptotikusan stabilis.
Termeszetes kerdes, hogy a erteket tovabb novelve, azaz a > 1 +√
6 eseten hogyanalakul a sorozat aszimptotikus viselkedese. Numerikus kıserletek azt mutatjak, hogyekkor 4-periodikus palya jelenik meg, es ez veszi at a vonzast. Ez mar explicit modonnem szamıthato ki, de numerikus vizsgalat soran azt tapasztaljuk, hogy ez az a para-meternek csak egy szuk tartomanyaban stabilis, es amikor stabilitasat elveszıti, akkor8-periodikus palya jelenik meg, amely szinten hamar elveszıti a stabilitasat, es megjele-nik a 16-periodikus palya, es ıgy tovabb. Ezt a jelenseget nevezik perioduskettozodesnek.Ez tulajdonkeppen bifurkaciok sorozata, amelyet a 8.1. Abraval lehet szemleltetni. Ezena vızszintes tengely menten valtozik az a erteke, a fuggoleges tengelyen pedig az adott aertekhez tartozo aszimptotikus viselkedest abrazoljuk. Ez aszimptotikusan stabil fixponteseten egyetlen pont, aszimptotikusan stabilis periodikus palya eseten a periodikus pa-lya pontjaibol allo halmaz. Az abrat termeszetesen csak numerikusan lehet elkeszıteni,a rekurzio kelloen sokszori alkalmazasaval.
Jelolje an az a parameter azon erteket, amelynel eloszor jelenik meg a 2n-periodikuspalya. Tehat a1 = 3, a2 = 1+
√6, ... Ezek erteket explicit modon nem lehet kiszamıtani,
de a numerikus szamıtasok azt mutatjak, hogy az ak sorozatnak van hatarerteke, eslim ak ≈ 3.569946. Bar a sorozat hatarertekere nincs elmeleti keplet, a tagok relatıvvaltozasara Feigenbaum 1975-ben az alabbi szep osszefuggest kapta
limn→∞
an − an−1
an+1 − an= 4, 669201609 . . . .
Ez azert fontos, mert a perioduskettozodes mas lekepezeseknel, peldaul az f(x) = a−x2,vagy f(x) = a sinx fuggveny eseteben ugyanıgy jatszodik le, es az an sorozatot hasonlomodon bevezetve, a fenti hatarertek mindig ugyanaz a szam, melyet Feigenbaum-szamnakneveznek.
163

8.1. abra. Perioduskettozodes a logisztikus lekepezesnel. Az aszimptotikus viselkedesvaltozasa az a parameter fuggvenyeben.
8.1.2. Kaotikus sorozatok
A kaosz fogalmanak reszletes targya meghaladja ezen jegyzet kereteit, ugyanis szamoskulonbozo kaosz definıcio van, melyekben azonban kozos, hogy az alabbi ket fontos elemettartalmazzak.
• Erzekeny fugges a kezdeti felteteltol egy korlatos halmazban.
• Aperiodikussag.
Ebben a szakaszban bevezetunk egy kaotikussag definıciot diszkret ideju dinamikairendszerek palyaira, majd megmutatjuk, hogy vannak olyan lekepezesek, melyeknek vankaotikus palyaja, sot a palyaik nagyresze ilyen. A fogalmakat az egyszeruseg kedveertegydimenzios fazister eseteben fogalmazzuk meg, termeszetesen ezek n-dimenzios fazis-terben ugyanıgy definialhatok.
Legyen f : R→ R folytonosan differencialhato fuggveny es tekintsuk az
xn+1 = f(xn)
rekurzioval definialt diszkret ideju dinamikai rendszert. Definialjuk eloszor a kaosz egyikfontos jellemzojet, a kezdeti felteteltol valo erzekeny fugges fogalmat.
164

Definıcio 8.7.. Egy p ∈ R pontban a megoldas erzekenyen fugg a kezdeti felteteltol, havan olyan δ > 0 szam, hogy minden ε > 0 szamhoz talalhato olyan q ∈ (p − ε, p + ε) esk ∈ N, melyre |fk(q)− fk(p)| ≥ δ, azaz a q es p pontokbol indulo palyak legalabb ennyireeltavolodnak egymastol.
Megjegyezzuk, hogy erre trivialis pelda egy instabil linearis rendszer, hiszen az f(x) = 2xfuggveny eseteben fk(q) = 2kq, ıgy a palyak exponencialisan tavolodnak egymastol. Akezdeti felteteltol valo erzekeny fugges akkor igazan erdekes, ha a p palyaja korlatos.
A palyak eltavolodasanak merteket lokalisan egy pont kornyezeteben a fuggveny de-rivaltja meri, mivel
f(q)− f(p) = f ′(p)(q − p) + o(q − p).
Igy amennyiben |f ′(p)| < 1, akkor a p korul a lekepezes lokalisan kontraktıv (a palyakkozelednek egymashoz), ha pedig |f ′(p)| > 1, akkor a p korul a lekepezes lokalisan expan-zıv (a palyak tavolodnak egymastol). Egy p pont palyajat kovetve, az fk(p) pontban a kerteketol fuggoen a lekepezes lehet kontraktıv, vagy expanzıv. Egy palya menten ezt at-lagolva kapjuk meg, hogy a p pont kornyezeteben a palya erzekenyen fugg-e a kezdeti fel-teteltol. Ennek meresere szolgal a Ljapunov-szam (illetve a Ljapunov-exponens/kitevo).
Definıcio 8.8.. Legyen f : R → R folytonosan differencialhato fuggveny. Egy p ∈ Rponthoz tartozo Ljapunov-szam:
L(p) = limn→∞
(|f ′(p)| · |f ′(f(p))| · . . . · |f ′(fn−1(p))|)1n .
A p ponthoz tartozo Ljapunov-exponens pedig ennek logaritmusa h(p) = lnL(p), azaz
h(p) = limn→∞
1
n· [ln |f ′(p)|+ ln |f ′(f(p))|+ . . .+ ln |f ′(fn−1(p))|].
Ha L(p) > 1, vagy maskepp fogalmazva h(p) > 0, akkor a p pontban a megoldas erzeke-nyen fugg a kezdeti felteteltol.
Terjunk ra most a kaosz masik jellemzojenek, az aperiodikussagnak a meghataroza-sara.
Definıcio 8.9.. Egy p ∈ R pont aszimptotikusan periodikus, ha van olyan q periodikuspont, amelyre
limn→∞
|ϕ(n, p)− ϕ(n, q)| = 0
(azaz, ha a p pontbol indulo palya egy periodikus palyahoz tart.
Ezen fogalmak segıtsegevel definialhatjuk a kaotikus palya fogalmat.
Definıcio 8.10.. Legyen f : R → R folytonosan differencialhato. Egy p ∈ R pontpalyajat (valojaban csak a pozitıv fel-palyat) kaotikusnak nevezzuk, ha
165

1. korlatos,
2. nem aszimptotikusan periodikus,
3. h(p) > 0, azaz erzekeny a kezdeti feltetelekre.
Bar a kaotikussag fogalma egyszeruen megfogalmazhato, annak igazolasa, hogy egylekepezes valamely palyaja kaotikus, tavolrol sem ilyen egyszeru. A logisztikus lekepezespalyainak numerikus vizsgalata azt mutatta, hogy vannak kaotikus palyak az a parameter4-hez kozeli ertekeinel, azonban ennek kozvetlen bizonyıtasa nehezsegekbe utkozik. Atovabbiakban bevezetunk egy masik lekepezest, a satorlekepezest, amelyben bizonyospalyak kaotikussagat a szimbolikus dinamika segıtsegevel be tudjuk bizonyıtani, majdmegmutatjuk, hogy ez a lekepezes konjugalt a logisztikus lekepezessel a = 4 eseten, ıgyez utobbinak is vannak kaotikus palyai.
A T (x) = 1−|2x−1| lekepezest sator lekepezesnek nevezik. A fuggveny a [0, 1] inter-vallumot onmagaba kepezi, ezt tekintjuk fazisternek. Nezzuk meg, hogy teljesulhetnek-ea kaotikussag definıciojaban tett feltetelek. Mivel a T lekepezes nem vezet ki a [0, 1]intervallumbol, azert a palyak (pozitıv k eseten) korlatosak. A Ljapunov-exponens ki-szamıtasahoz a palyanak el kell kerulnie az 1/2 pontot, mivel ott a a fuggveny nemdifferencialhato. Ezert az olyan p pontoktol eltekintve, melyekbol a palya bejut az 1/2pontba, minden p eseten |T ′(p)| = 2, ıgy h(p) = ln 2 > 0. Tehat egy palya akkor kaoti-kus, ha nem aszimptotikusan periodikus. A kovetkezo szakaszban a szimbolikus dinamikasegıtsegevel igazolni fogjuk, hogy megszamlalhatoan sok pont kivetelevel a pontok nemaszimptotikusan periodikusak, amelybol kovetkezik az alabbi.
Allıtas 8.3. A T (x) = 1−|2x−1| satorlekepezesnek letezik vegtelen sok kaotikus palyaja.
A logisztikus lekepezes eseteben a Ljapunov-exponens kiszamıtasa nehezseget okozna,ezert celszeru inkabb a satorlekepezessel valo konjugaltsagot igazolni. Tekintsuk a H :[0, 1]→ [0, 1],
H(x) = sin2(πx
2
)homeomorfizmust. Megmutatjuk, hogy erre teljesul a H(T (x)) = f(H(x)) osszefugges,ahol f a logisztikus lekepezes. Ugyanis egyreszt
f(H(x)) = 4 sin2(πx
2
)(1− sin2
(πx2
))= 4 sin2
(πx2
)cos2
(πx2
)= sin2(πx),
masreszt x ∈ [0, 1/2) eseten T (x) = 2x, ıgy
H(T (x)) = sin2
(π2x
2
)= sin2(πx).
Ha pedig x ∈ (1/2, 1], akkor T (x) = 2 − 2x, es ez esetben is egyszeruen latszik, hogyH(T (x)) = sin2(πx).
166

A H homeomorfizmus tehat a satorlekepezes kaotikus palyait a logisztikus lekepezespalyaira kepezi, ez bizonyıtja az alabbit.
Allıtas 8.4. A logisztikus lekepezesnek letezik vegtelen sok kaotikus palyaja.
8.1.3. Szimbolikus dinamika
A szimbolikus dinamikat csak a satorlekepezes peldajan mutatjuk be, bar egy altalano-sabb lekepezes osztaly eseteben hasonloan definialhato. Legyen tehat T : [0, 1] → [0, 1],T (x) = 1− |2x− 1| a satorlekepezes. Legyen
Λ = x ∈ [0, 1] : T n(x) 6= 1
2,∀n ∈ N
azon pontok halmaza, amelyekbol indulo palya nem lep soha az 1/2 pontba. A tovab-biakban ezen a halmazon fogjuk tekinteni a T lekepezest. A [0, 1] intervallumot egybaloldali es jobboldali reszre osztjuk, jelolje ezeket IL = [0, 1
2), IR = (1
2, 1].
Legyen Σ az L es R elemekbol allo sorozatok halmaza Σ = a : N → L,R, azazha a ∈ Σ, akkor a = (a0a1a2 . . .), ahol ai = L vagy ai = R ∀ i eseten. Vezessuk be aΦ : Λ→ Σ
(Φ(x))n =
L ha fn(x) ∈ ILR ha fn(x) ∈ IR
lekepezest. Azaz a (Φ(x)) sorozat n-edik tagja L, ha az x pontbol indulo palya n lepesutan az intervallum bal felen van, es a (Φ(x)) sorozat n-edik tagja R, ha az x pontbolindulo palya n lepes utan az intervallum jobb felen van. A Φ lekepezes a Λ ⊂ [0, 1]halmaz pontjaihoz L,R sorozatokat rendel. A 0 ponthoz peldaul az L,L, L, . . . sorozattartozik, mert a 0 pont fixpont, azaz a belole indulo palya mindig az intervallum baloldalan van. Hasonlokeppen a 2/3 fixponthoz az R,R,R, . . . sorozat tartozik, mert azebbol indulo palya mindig az intervallum jobb oldalan van. Az 1 pontbol indulo palyaegy lepes utan a 0 fixpontba lep, ezert az 1 szamhoz tartozo sorozat R,L, L, L, . . .. AΦ lekepezes fontos tulajdonsaga, hogy bijekcio a Λ pontjai es az L,R sorozatok kozott.Ezt fogjuk most igazolni.
Allıtas 8.5. A Φ : Λ→ Σ lekepezes injektıv, azaz kulonbozo pontokhoz kulonbozo sorozattartozik.
Bizonyıtas. Legyen x, y ∈ Λ, x 6= y. Meg kell mutatnunk, hogy Φ(x) 6= Φ(y). Hax es y az intervallum ugyanazon oldalan van, akkor |f(x) − f(y)| = 2|x − y|, merta satorlekepezes meredeksege 2, vagy −2. Indirekt modon tegyuk fel, hogy Φ(x) =Φ(y). Ekkor fn(x) es fn(y) ugyanabban a komponensben vannak minden n ∈ N eseten.Igy |f 2(x) − f 2(y)| = 2|f(x) − f(y)| = 22|x − y|. Indukcioval megmutathato, hogy|fn(x) − fn(y)| = 2n|x − y|, ıgy |fn(x) − fn(y)| → ∞, ami ellentmond annak, hogy apalyak korlatosak.
167

Allıtas 8.6. A Φ : Λ→ Σ lekepezes szurjektıv, azaz barmely L,R sorozathoz megadhatoegy pont a Λ halmazban, amelyhez ez a sorozat tartozik.
Bizonyıtas. Vegyunk egy x ∈ Λ pontot es tekintsuk a hozzatartozo sorozat elso nehanytagjat, legyen ez peldaul L,R, L. Az elso L azt jelenti, hogy x ∈ [0, 1/2), a masodikbetu R, pedig azt mutatja, hogy ezen az intervallumon belul x ∈ (1/4, 1/2). Mivel aharmadik betu L, azert x ∈ (3/8, 1/2). A sorozat minden egyes tagja felere zsugorıtjaazt az intervallumot, ahol x elhelyezkedhet, ıgy a Cantor-fele kozospont tetel szerint vanegyetlen olyan pont, amelyhez a sorozat tartozik.
A fazisterunk pontjait megfeleltettuk tehat L,R sorozatoknak, most pedig a sorozatokhalmazan definialunk egy dinamikat, amely a satorlekepezessel konjugalt lesz.
Allıtas 8.7. Legyen σ : Σ→ Σ, a σ(a0a1a2 . . .) = (a1a2a3 . . .) keplettel definialt eltolas.Ekkor Φ T = σ Φ, azaz T es σ konjugaltak.
Bizonyıtas. Legyen Φ(x) = (a0a1a2 . . .), ekkor x ∈ Ia0 , T (x) ∈ Ia1 , T 2(x) ∈ Ia2 , . . .. Ezazt jelenti, hogy Φ(T (x)) = (a1a2 . . .), mert T (x) ∈ Ia1 , T 2(x) = T (T (x)) ∈ Ia2 , . . .. Igyσ(Φ(x)) = (a1a2 . . .) = Φ(T (x)), amit igazolni akartunk.
Kovetkezmeny 8.11.. Az a ∈ Σ pontosan akkor k-periodikus pontja a σ lekepezesnek,ha x = Φ−1(a) ∈ Λ k-periodikus pontja a T lekepezesnek.
Ez a kovetkezmeny azert nagyon fontos, mert a σ lekepezes periodikus pontjait na-gyon egyszeru meghatarozni, mıg a T lekepezesnel ez komoly nehezsegekbe utkozhet.Peldaul az L,R, L,R, L,R, . . . a σ lekepezes 2-periodikus pontja, hiszen ezt a sorozatoteggyel eltolva az R,L,R, L,R, . . . sorozatot kapjuk, amelyet meg eggyel eltolva visszakap-juk az eredeti sorozatot. Ha 3-periodikus pontot akarunk eloallıtani, akkor a kovetkezolehetosegeink vannak: ismetelni kell az alabbi harmasokat
LLR,LRL,RLL, illetve RRL,RLR,LRR.
Ezen peldak alapjan vilagos az alabbi allıtas.
Allıtas 8.8. Barmely k ∈ N eseten a σ lekepezesnek veges sok k-periodikus pontja van,es konjugaltsaguk miatt ugyanez mondhato el a T satorlekepezesrol is.
A kaotikussag igazolasahoz a T lekepezes aszimptotikusan periodikus pontjait kellvizsgalni. Ehhez vegyuk eszre, hogy a T lekepezes minden periodikus palyaja insta-bil, ugyanis a T derivaltjanak abszoluterteke mindig nagyobb egynel (|T ′| = 2). Ezertegy p pont csak ugy lehet aszimptotikusan periodikus, ha maga is periodikus, vagy abelole indulo palya veges sok lepesben rakerul egy periodikus palyara, azaz van olyan
168

n ∈ N, hogy fn(p) periodikus. Az ilyen pontokat vegul-periodikus pontoknak nevez-zuk. A konjugaltsag miatt egy x ∈ Λ pont pontosan akkor vegul-periodikus pontja a Tlekepezesnek, ha Φ(x) vegul-periodikus pontja a σ lekepezesnek. A σ lekepezes esete-ben a vegul-periodikus pontokat egyszeru generalni, hiszen a periodikus sorozat elejereel kell helyezni egy tetszoleges veges sorozatot. Peldaul az L,L, L, L,R, L,R, L,R, . . .sorozat vegul-2-periodikus, hiszen harom eltolas utan a periodikus L,R, L,R, L,R, . . .sorozatot kapjuk belole. A konstrukciobol nyilvanvalo, hogy vegul-k-periodikus sorozat-bol megszamlalhatoan sok lehet, ıgy vegul-periodikus sorozatbol is megszamlalhato sokvan. Ezzel tehat az alabbi allıtashoz jutottunk.
Allıtas 8.9. A satorlekepezesnek megszamlalhatoan sok aszimptotikusan periodikus pontjavan.
Ennek alapjan az elozo szakaszban leırtak szerint az alabbi all fenn.
Tetel 8.12.. A satorlekepezes, illetve az a = 4 parameterhez tartozo logisztikus lekepezeseseteben megszamlalhatoan sok pont kivetelevel barmely pontbol kiindulva kaotikus palyatkapunk.
169
9. fejezet
Reakcio-diffuzio egyenletek
A reakcio-diffuzio egyenletek matematikailag szemilinearis parabolikus parcialis differen-cialegyenletek, melyek altalanos alakja
∂tu = D∆u+ f(u), (9.1)
ahol u : R+ × Rn → Rm az ismeretlen fuggveny, f : Rm → Rm folytonosan differencial-hato fuggveny es D pozitıv elemu diagonalis matrix (az ido szerinti parcialis derivalast,illetve a ter szerinti Laplace-operatort koordinatankent alkalmazzuk az u fuggvenyre).Az egyenlethez kulonbozo peremfeltetelek tartozhatnak, utazo hullamok vizsgalata esetenpeldaul az egyenletet a teljes Rn teren tekintik, ekkor a peremfeltetelek u korlatossagaravagy vegtelenbeli hatarertekere vonatkoznak. Korlatos tartomany eseten mindharomtıpusu szokasos peremfeltetel elofordul a vizsgalatokban. A peremfeltetel mellett terme-szetesen az u(·, 0) kezdeti fuggveny megadasa is szukseges. Az egyenlet neve a kemiaialkalmazasbol szarmazik, ez esetben uk(t, x) a k-adik (k = 1, 2, . . . ,m) anyag koncent-raciojat jelenti a t idopontban es az x helyen, tovabba a jobboldal elso tagja fejezi kia diffuziot, a masodik pedig a kemiai reakciokat. Az egyenlet azonban szamos mas fi-zikai, biologiai, kozgazdasagi jelenseg modellje is lehet a jarvanyterjedestol az ingeruletvezetesen at a mintazat kepzodesig.
A reakcio-diffuzio egyenletek kutatasa az alkalmazasokon kıvul a dinamikai rendszerekelmeletebol nott ki, ugyanis az U(t) = u(·, t) fuggvenyt bevezetve a (9.1) egyenlet az
U(t) = AU(t) + F (U(t)) (9.2)
absztrakt Cauchy-feladatkent ırhato fel. Kezenfekvo tehat megvizsgalni, hogy az x(t) =f(x(t)) kozonseges differencialegyenlet-rendszerre vonatkozo eredmenyek menynyiben al-talanosıthatok a (9.2) vegtelen dimenzios feladatra. Ismert, hogy a kozonseges differen-cialegyenlet-rendszer megoldasai dinamikai rendszert hataroznak meg. A (9.2) egyenleteseteben ennek bizonyıtasa azert sokkal nehezebb feladat, mert a jobboldalon szereploA operator nem korlatos. Az otvenes evektol kezdodoen kifejlesztett operator felcsoport
170

elmelet segıtsegevel kidolgoztak a (9.2) Cauchy-feladatra vonatkozo egzisztencia elme-letet, melyrol peldaul Henry, Pazy illetve Cazenave es Haraux konyveben olvashatunk[6, 14, 18]. A dinamikai rendszer letezesenek bizonyıtasaval megkezdodhetett a kvalitatıvtulajdonsagok tanulmanyozasa. Ez magaban foglalja a stacionarius, periodikus, kaotikus,illetve utazo hullam megoldasok letezesenek, pontos szamanak, valamint stabilitasanakvizsgalatat. A specialis tıpusu megoldasokon kıvul fontos kerdes a megoldasok aszimp-totikus (hosszu ido utani) viselkedese, valamint az attraktorok letezesenek kerdese, esvonzasi tartomanyaik meghatarozasa, melyet altalanosan targyal Robinson konyve [21].
Reakcio-diffuzio egyenletekkel kapcsolatosan szamos eredmeny ismert, ezek onma-gukban is meghaladjak egy tankonyv kereteit, ebben a jegyzetben csak ızelıtot adunkket specialis temabol, az egydimenzios terbeli stacionarius es utazo hullam megoldasokvizsgalatabol.
9.1. Reakcio-diffuzio egyenletek stacionarius megol-
dasai
Ebben a fejezetben az egy reakcio-diffuzio egyenletre (m = 1) vonatkozo, stacionariusmegoldasok szamaval kapcsolatos elemi eredmenyeket ismertetjuk. Legyen Ω ⊂ Rn simahataru tartomany, szamunkra ez csak egy intervallum lesz, es tekintsuk a
∆u+ f(u) = 0
szemilinearis elliptikus egyenletet azonosan nulla Dirichlet peremfeltetel, azaz u|∂Ω = 0mellett. Vizsgalatunk targya a pozitıv megoldasok szama. A kerdesfelvetes ilyen forma-ban nagyon altalanos, az irodalomban tobb ezer publikacio talalhato ezzel kapcsolatosan,melyek kulonbozo tartomanyok es kulonbozo nemlinearitasok eseten targyaljak a kerdest.Mi csak azzal az esettel foglalkozunk, amikor Ω egy intervallum, amelyrol az egyenletautonom volta miatt az altalanossag megszorıtasa nelkul felteheto, hogy a nulla pontraszimmetrikus, tehat legyen Ω = (−R,R), valamely pozitıv R eseten. A tovabbiakbantehat az
u′′(x) + f(u(x)) =0 (9.3)
u(−R) = u(R) =0 (9.4)
peremertek-problemat vizsgaljuk. A pozitıv megoldasokrol egyszeruen igazolhato, hogyparos fuggvenyek (azaz u(−x) = u(x)), ezert a feladat az alabbi peremertek-feladatraredukalodik.
u′′(x) + f(u(x)) =0 (9.5)
u′(0) = 0, u(R) =0. (9.6)
171

Celunk tehat ezen feladat pozitıv megoldasainak pontos szamat meghatarozni.Ehhez az u.n. celbaloveses, vagy ”time-map” modszert fogjuk alkalmazni. A modszer
lenyege, hogy a (9.5) differencialegyenletet eloszor a (9.6) peremfeltetel helyett az
u(0) = c, u′(0) = 0 (9.7)
kezdeti feltetellel tekintjuk valamilyen c > 0 eseten. Az egzisztencia es unicitas tetel sze-rint a fenti kezdeti feltetel mellett letezik egyetlen u(·, c) megoldas barmely c > 0 eseten.Ezutan a peremertek-problema megoldasat az u.n. celbaloveses modszerrel keressuk (sho-oting), azaz a c erteket valtoztatjuk mindaddig, amıg olyan megoldast kapunk, amelynekelso gyoke a R pontban van. Ehhez definialjuk az alabbi lekepezest (time-map).
T (c) = minr > 0 : u(r, c) = 0 ; D(T ) = c > 0 : ∃r > 0 u(r, c) = 0. (9.8)
A (9.5)-(9.6) peremertek-problema pozitıv megoldasainak szama tehat egyenlo a T (c) =R egyenlet c-re kapott megoldasainak szamaval.
Vegyuk eszre, hogy ebben az egyszeru esetben a masodrendu egyenletnek megfeleloelsorendu rendszerhez konnyen megadhato egy elso integral, nevezetesen
H(x) := u′(x)2 + 2F (u(x)), (9.9)
ahol F (u) :=∫ u
0f . Derivalassal azonnal ellenorizheto, hogy H ′ = 0, azaz a H fuggveny
konstans. A (9.7) kezdeti feltetel szerint ez a konstans 2F (c), ıgy minden x ∈ [0, T (c)]eseten fennall az
u′(x)2 + 2F (u(x)) = 2F (c)
azonossag. Mivel pozitıv megoldast keresunk, amely az intervallum vegpontjaban nulla,azert egyszeruen lathato, hogy u′ < 0, ıgy a fenti egyenletbol
u′(x) = −√
2F (c)− 2F (u(x)).
Ebbol integralas utan az
T (c)∫0
u′(x)√2F (c)− 2F (u(x))
dx = −T (c)
egyenlethez jutunk. Hajtsuk vegre az integralban az s = u(x) helyettesıtest. Ekkor
T (c) =
c∫0
1√2F (c)− 2F (s)
ds,
172

majd a t = s/c uj integracios valtozot bevezetve
T (c) =
1∫0
c√2F (c)− 2F (ct)
dt. (9.10)
Ez a formula lehetoseget ad kulonbozo f fuggvenyek eseten a T (c) = R egyenlet megol-dasai szamanak meghatarozasara. Ezt az alabbi peldan fogjuk bemutatni.
Pelda 9.1. Hatarozzuk meg, hogy az
u′′(x) + u(x)(1− u(x)) =0 (9.11)
u(−R) = u(R) =0. (9.12)
peremertek-feladatnak hany pozitıv megoldasa van az R kulonbozo ertekeire. Amint azelobb lattuk, ehhez elegendo azt megmondani, hogy a T (c) = R egyenletnek hany megol-dasa van. Irjuk fel ehhez a T fuggvenyt a jelen esetre, azaz, amikor f(u) = u(1 − u).Ekkor F (u) = u2/2− u3/3, ıgy a (9.10) kepletbol (c-vel valo egyszerusıtes utan)
T (c) =
1∫0
1√1− t2 − 2c
3(1− t3)
dt.
Egyszeruen lathato, hogy T a [0, 1) intervallumon van ertelmezve, es azon szigoruan novo(hiszen a valtozo (c) a nevezoben negatıv elojellel szerepel), tovabba
T (0) =
1∫0
1√1− t2
dt =π
2.
Az integral elemi becslesebol azt is lathatjuk, hogy limc→1
T (c) =∞. Ezek alapjan T ertek-
keszlete a [π/2,∞) intervallum, es abban minden erteket pontosan egy helyen vesz fel.Tehat a T (c) = R egyenletnek, es ıgy ezzel egyutt a (9.11)-(9.12) peremertek-feladatnakegy pozitıv megoldasa van, ha R ≥ π/2, es nincs pozitıv megoldasa, ha R < π/2.
9.2. Reakcio-diffuzio egyenletek utazo hullam meg-
oldasai
Ebben a szakaszban a terbeli tartomany tovabbra is egydimenzios (n = 1), viszont nemkorlatos. Tekintsuk tehat a
∂tu = ∂xxu+ f(u), (9.13)
173

reakcio-diffuzio egyenletet, melyben u : R+×R→ R az ismeretlen fuggveny es f : R→ Rfolytonosan differencialhato fuggveny.
Az egyenlet u(t, x) = U(x − ct) alaku megoldasat, melyben U : R → R fuggveny, csebesseggel halado utazo hullam megoldasnak nevezik. Az U fuggveny teljesıti az alabbikozonseges differencialegyenlet:
U ′′(y) + cU ′(y) + f(U(y)) = 0, (y = x− ct). (9.14)
Ehhez a masodrendu egyenlethez termeszetes modon peremfeltetelek is tartoznak. AdottU−, U+ ∈ R eseten a
lim−∞
U = U−, lim+∞
U = U+
peremfeltetelhez tartozo utazo-hullamot frontnak nevezzuk, amennyiben U− 6= U+, va-lamint pulzusnak nevezzuk, ha U− = U+. Ha az U fuggveny periodikus, akkor a ”wavetrain” elnevezest hasznaljak.
9.2.1. Utazo hullamok letezese
Az utazo hullam letezesenek igazolasahoz meg kell mutatni, hogy van olyan c ∈ R sebes-seg, amelyhez a (9.14) egyenletnek van az eloırt peremfeltetelt kielegıto megoldasa. Azilyen tıpusu bizonyıtasok prototıpusat ismertetjuk roviden az alabbiakban. Tekintsuk az
U ′′(y) + cU ′(y) + f(U(y)) = 0 (9.15)
egyenletet alim−∞
U = 1, lim+∞
U = 0 (9.16)
peremfeltetellel. Az f(u) = u(1 − u) nemlinearitassal az egyenletet Kolmogorov, Pet-rovszkij es Piszkunov vizsgaltak eloszor, ebben az esetben gyakran KPP-egyenletkenthivatkoznak ra. Masik fontos nemlinearitas a FitzHugh-Nagumo (FHN) egyenletbolszarmazo f(u) = u(1− u)(u− a), valamely a ∈ (0, 1) eseten. Ezek reszletes ismertetesemegtalalhato Fife konyveben [10]. Az utazo hullam letezese szempontjabol a ket esetlenyegesen elter egymastol. Irjuk at ugyanis a (9.15) masodrendu egyenletet elsorendurendszerre:
U ′ = V (9.17)
V ′ = −f(U)− cV (9.18)
Ennek a rendszernek egyensulyi pontja a (0, 0) es az (1, 0) pont. A peremfeltetelekbolmegmutathato, hogy az U ′ fuggvenynek ±∞-ben 0 a hatarerteke, ezert az utazo hul-lamnak a (9.17)-(9.18) elsorendu rendszerben a (0, 0) es (1, 0) pontokat osszekoto heter-oklinikus palya felel meg. A KPP-egyenlet eseteben ha c > 0, akkor az egyik egyensulyi
174

pont stabil csomo, a masik pedig nyereg es a nyeregbol kiindulo palya (instabil sokasag) astabil csomoba fut be. Azaz barmely c > 0 eseten van utazo hullam megoldas. Konnyenigazolhato, hogy ez a megoldas c > 2 eseten pozitıv, kulonben elojelet valt. Igazolhato,hogy a vegtelen sok utazo hullam megoldas kozul csak a c = 2 sebesseghez tartozo stabi-lis. A FitzHugh-Nagumo tıpusu nemlinearitas eseteben mindket egyensulyi pont nyereg,az ezeket osszekoto palya nem tipikus. Valoban megmutathato, hogy csak egyetlen olyanc ertek letezik, amely mellett van a ket nyeregpontot osszekoto palya, azaz utazo hullammegoldas.
Adott f fuggveny eseteben viszonylag egyszeru fazissık analızissel kaphatunk felte-teleket utazo hullam letezesere. Fife az alabbi altalanos allıtast bizonyıtja ([10] 4.15.Tetel)
Tetel 9.1.. Legyen f ∈ C1(0, 1) fuggveny, melyre f(0) = f(1) = 0.
• Ha f > 0 a (0,1) intervallumban, akkor letezik olyan c∗, melyre c > c∗ esetenletezik a (9.15) egyenletnek a (9.16) peremfeltetelt kielegıto pozitıv utazo hullammegoldasa.
• Ha van olyan a ∈ (0, 1), melyre f < 0 a (0,a) intervallumban es f > 0 az (a,1)intervallumban, akkor letezik egyetlen olyan c ertek, melyre a (9.15) egyenletnekletezik a (9.16) peremfeltetelt kielegıto pozitıv utazo hullam megoldasa.
Tehat az allando elojelu, KPP-tıpusu nemlinearitas eseten vegtelen sok c ertek mel-let letezik utazo hullam megoldas, mıg az egy elojelvaltassal rendelkezo, FHN-tıpusunemlinearitas eseteben, csak egyetlen c erteknel van utazo hullam.
9.2.2. Utazo hullamok stabilitasa
Az utazo-hullamra vonatkozo (9.14) egyenlet autonom, ezert, ha U egy megoldas, akkorennek minden vızszintes eltoltja is az, azaz U∗(y) = U(y + y0) is megoldasa a (9.14)egyenletnek tetszoleges y0 ∈ R eseten. Ezert az utazo hullam stabilitasat palya sta-bilitaskent celszeru definialni (a periodikus palya stabilitasahoz hasonloan). Ebben azesetben a palyamenti aszimptotikus stabilitast szoktak stabilitasnak nevezni.
Definıcio 9.2.. Az U utazo hullam stabilis, ha a (9.13) rendszer u megoldasara, melyre|u(0, x)−U(x)| elegendoen kicsi minden x ∈ R eseten, van olyan x0 ∈ R, amellyel t→∞eseten
supx∈R|u(t, x)− U(x0 + x− ct)| → 0.
175

Esetunkben a (9.14) tıpusu szemilinearis parabolikus egyenletre a maximum elvbol le-vezetheto egy osszehasonlıtasi tetel, amelynek segıtsegevel stabilitasi tetelek igazolhatok[10]. Ebben az esetben nemcsak a fenti definıciobeli lokalis stabilitas igazolhato, hanemaz utazo hullam vonzasi tartomanyara is adhato becsles. A KPP-egyenletre vonatkozoanbebizonyıtottak [10], hogy ha az u(0, ·) kezdeti fuggveny ugro fuggveny, azaz negatıv xeseten 1, pozitıv x eseten 0 az erteke, akkor letezik olyan ψ fuggveny, amelyre t → ∞eseten
supx∈R|u(t, x)− U(ψ(t) + x− c∗t)| → 0 (9.19)
es ψ′(t) → 0, ahol c∗ a 9.1.. Tetelben adott minimalis sebesseg. Az FHN-tıpusu, elojel-valto nemlinearitas eseteben az alabbi, [10] konyvben talalhato tetel igaz.
Tetel 9.3.. Legyen f ∈ C1(0, 1) olyan fuggveny, melyre f(0) = f(1) = 0, es van olyana ∈ (0, 1), melyre f < 0 a (0,a) intervallumban es f > 0 az (a,1) intervallumban. Ekkoraz egyetlen utazo hullam stabilis.
Az utazo hullam lokalis stabilitasat linearizalassal lehet eldonteni. Ehhez helyettesıt-suk be a (9.13) egyenletbe az u(t, x) = U(x− ct) + v(t, x− ct) fuggvenyt. Az f(U + v)helyere beırva az f(U) + f ′(U)v linearis kozelıtest, valamint felhasznalva a U fuggvenyrevonatkozo (9.14) egyenletet a v fuggvenyre az alabbi linearis parabolikus egyenletet kap-juk.
∂tv = ∂yyv + c∂yv + f ′(U(y))v. (9.20)
Ekkor a kovetkezo ket kerdes merul fel.
• Milyen feltetelek mellet lesz a (9.20) egyenlet azonosan nulla megoldasa stabilis?
• Kovetkezik-e ebbol az utazo hullam stabilitasa?
Az elso kerdesre valaszt kaphatunk, ha a (9.20) linearis egyenlet megoldasat v(t, y) =exp(λt)V (y) alakban keressuk. Ekkor a V fuggvenyre a
V ′′(y) + cV ′(y) + f ′(U(y))V (y) = λV (y) (9.21)
egyenletet kapjuk. A fenti alaku v megoldasok Reλ < 0 eseten tartanak nullahoz t→ +∞mellett. Ezert varhato, hogy a (9.20) linearis egyenlet nulla megoldasanak stabilitasataz
(LV )(y) = V ′′(y) + cV ′(y) + f ′(U(y))V (y), (9.22)
BUC(R,C) ∩ C2(R,C) terben ertelmezett masodrendu differencialoperator spektrumahatarozza meg. Fontos eszrevennunk, hogy a 0 sajaterteke az operatornak az U ′ sajat-fuggvennyel. (Ez egyszeruen kovetkezik a (9.14) egyenlet differencialasabol.) Ez a tenyegyebkent osszhangban van azzal, hogy az utazo hullam megoldas minden vızszintes el-toltja szinten utazo hullam. Igy tehat, amint az utazo hullam a hagyomanyos ertelemben
176

nem lehet aszimptotikusan stabilis (csak palyamenti stabilitas varhato), ugy a lineariza-lassal kapott L operator spektruma sem lehet teljes egeszeben a komplex sık baloldalireszen, a 0 mindig sajatertek. A fent feltett kerdesekre vegulis az alabbi tetel ad valaszt([25] 25. Fejezet).
Tetel 9.4.. Ha 0 egyszeres sajaterteke az L operatornak, a tobbi sajatertekekre Reλ < 0,es van olyan β < 0, melyre Reλ < β minden λ ∈ σess(L) eseten, akkor az U utazo hullamstabilis.
Esetunkben a lenyeges spektrumot az alabbi ertelemben hasznaljuk
σess(L) := λ ∈ σ(L) | λ nem izolalt sajatertek veges multiplicitassal.
A linearizalassal kapott operator spektruma
Ebben a szakaszban a BUC(R,C) ∩ C2(R,C) teren ertelmezett
(LV )(y) = V ′′(y) + cV ′(y) +Q(y)V (y), (9.23)
operator spektrumat vizsgaljuk. Ezt az operatort az utazo hullam koruli linearizalassalkaptuk, akkor Q(y) = f ′(U(y)) volt. Most csak annyit teszunk fel a Q fuggvenyrol, hogyQ : R→ R folytonos, es a Q± = limy→±∞Q(y) hatarertekek leteznek.
Az operator spektrumat altalaban nem lehet explicit modon meghatarozni csak abbanaz esetben, amikor az operator allando egyutthatos, azaz Q konstans fuggveny. Az alabbipeldaban ezt kiszamıtjuk, ugyanis ez a specialis eset a kesobbi vizsgalatok szempontjabolhasznos lesz.
Pelda 9.2. Legyenek c, q ∈ R adott szamok es tekintsuk az alabbi allando egyutthatosoperatort
LV = V ′′ + cV ′ + qV.
A λ ∈ C szam regularis erteke az L operatornak, ha a
V ′′ + cV ′ + (q − λ)V = W (9.24)
egyenletnek letezik pontosan egy, W -tol folytonosan fuggo V ∈ BUC(R,C) megoldasabarmely W ∈ BUC(R,C) eseten. A homogen egyenlet (melyben W = 0) megoldasait a
V (y) = c1 exp(µ1y) + c2 exp(µ2y)
keplet adja, melyben µ1,2 a µ2 +cµ+q−λ = 0 egyenlet megoldasai. A fenti V fuggvenyreV ∈ BUC(R,C) pontosan akkor, ha Reµ1,2 = 0, ami akkor teljesul, ha
Reλ = q −(
Imλ
c
)2
.
177

Ezen egyenletet kielegıto λ komplex szamok tehat az L operator spektrumaban vannak. Azinhomogen egyenlet (W 6= 0) a konstans variacios formula segıtsegevel oldhato meg. Iga-zolhato, hogy a fenti egyenletet nem teljesıto λ szamokra a (9.24) egyenletnek letezik pon-tosan egy, W -tol folytonosan fuggo V ∈ BUC(R,C) megoldasa barmely W ∈ BUC(R,C)eseten, azaz ekkor λ regularis ertek. Tehat az L operator spektruma a
σ(L) = σess(L) = P := λ1 + iλ2 ∈ C | λ1 = q −(λ2
c
)2
.
parabola, amely a 9.1. abran lathato. Ha c = 0, akkor a spektrum a H = λ1 < qfelegyenes.
9.1. abra. Az LV = V ′′ + cV ′ + qV operator spektruma.
A spektrum jellemzese az invarians alterekkel
Terjunk vissza az altalanos (9.23) operator spektrumanak vizsgalatara. Celszeru beve-zetni az LV = λV masodrendu egyenlethez tartozo elsorendu rendszert. Legyen X1 = V ,X2 = V ′, ekkor az elsorendu rendszer
X ′(y) = AλX(y), (9.25)
ahol
Aλ(y) =
(0 I
λI −Q(y) −c
). (9.26)
Mivel a Q fuggvenynek van hatarerteke ±∞-ben, azert leteznek az
A±λ = limy→±∞
Aλ(y)
178

hatarertekek is. Az A±λ matrixok stabil, instabil es centralis alterenek dimenzioja fontosszerepet fog jatszani. Jelolje az A+
λ matrix pozitıv, negatıv, illetve nulla valosreszusajatertekeinek szamat (multiplicitassal szamıtva) n+
u (λ), n+s (λ) es n+
c (λ). Hasonloandefinialjuk az n−u (λ), n−s (λ), n−c (λ) szamokat az A−λ matrixra. Ezek a szamok tehat amegfelelo instabil, stabil es centralis alterek dimenzioi.
Az 9.2. Peldaban szereplo operator eseteben erdemes megvizsgalni, hogy milyenkapcsolatban vannak ezek a dimenziok az operator spektrumaval. Ekkor LV = V ′′ +cV ′ + qV , ıgy
A+λ = A−λ =
(0 1
λ− q −c
).
Ezen matrix karakterisztikus egyenlete µ2 + cµ + q − λ = 0. Konnyen igazolhato, hogyc > 0 eseten fennallnak az alabbiak.
• Ha Reλ < q −(
Imλc
)2
, akkor Reµ1 < 0, Reµ2 < 0, ezert n±s (λ) = 2, n±u (λ) = 0,
n±c (λ) = 0.
• Ha Reλ = q −(
Imλc
)2
, akkor Reµ1 = 0, Reµ2 < 0, ezert n±s (λ) = 1, n±u (λ) = 0,
n±c (λ) = 1.
• Ha Reλ > q −(
Imλc
)2
, akkor Reµ1 > 0, Reµ2 < 0, ezert n±s (λ) = 1, n±u (λ) = 1,
n±c (λ) = 0.
Az egyes invarians alterek dimenziojat a 9.2. abran osszegeztuk.A 9.2. Peldaban lattuk, hogy az operator spektruma a 9.2. abran lathato parabola,
tehat az allando egyutthatos esetben a spektrum azon λ szamokbol all, melyekre n±c (λ) >0. A kovetkezo tetel szerint ezek a szamok az altalanos (nem allando egyutthatos)esetben is a spektrumhoz tartoznak, azonban ekkor olyan λ szamok is benne lehetnek espektrumban, melyekre n±c (λ) = 0.
Tetel 9.5.. Tegyuk fel, hogy az alabbi feltetelek kozul legalabb az egyik teljesul:
(a) n+c (λ) > 0 es
∫ +∞0|Aλ(y)− A+
λ | <∞
(b) n−c (λ) > 0 es∫ 0
−∞ |Aλ(y)− A−λ | <∞.
Ekkor λ ∈ σ(L).
A tetelt a [23] cikkben igazoltuk, a bizonyıtas egy a nem-autonom linearis egyenletekaszimptotikus viselkedeset leıro tetelen alapul.
A tovabbiakban tehat eleg az n+c (λ) = 0 = n−c (λ) esettel foglalkozni. Ebben az
esetben exponencialis dichotomiak es perturbacios tetelek segıtsegevel az alabbi teteligazolhato, [9].
179

9.2. abra. Az allando egyutthatos LV = V ′′ + cV ′ + qV operatorhoz tartozo invariansalterek dimenzioja.
Tetel 9.6.. Tegyuk fel, hogy n+c (λ) = 0 = n−c (λ).
• Letezik olyan n+s (λ) dimenzios E+
s (λ) ⊂ C2 alter, amelybol indıtva a (9.25) rend-szer megoldasait, azok vegtelenben nullahoz tartanak.
• Letezik olyan n−u (λ) dimenzios E−u (λ) ⊂ C2 alter, amelybol indıtva a (9.25) rend-szer megoldasait, azok −∞-ben nullahoz tartanak.
Ha egy nem nulla kezdeti feltetel benne van az E+s (λ) es az E−u (λ) alterben is, akkor
az abbol indulo megoldas +∞-ben es −∞-ben is nullahoz tart, ıgy λ sajatertek, hadim(E+
s (λ) ∩ E−u (λ)) > 0. Exponencialis dichotomiak segıtsegevel az alabbi tetelt iga-zoltuk [23].
Tetel 9.7.. Tegyuk fel, hogy n+c (λ) = 0 = n−c (λ).
(i) A λ szam pontosan akkor sajaterteke az L operatornak, ha dim(E+s (λ)∩E−u (λ)) >
0.
(ii) A λ szam pontosan akkor regularis erteke az L operatornak, ha E+s (λ)⊕ E−u (λ) =
C2.
180

Felhasznalva, hogy E+s (λ)⊕E−u (λ) = C2 ekvivalens a dimE+
s (λ) + dimE−u (λ) = 2 esdim(E+
s (λ) ∩ E−u (λ)) = 0 feltetelekkel, egyszeruen adodik az alabbi kovetkezmeny.
Kovetkezmeny 9.8.. Tegyuk fel, hogy n+c (λ) = 0 = n−c (λ).
1. Ha dimE+s (λ) + dimE−u (λ) > 2, akkor λ sajaterteke az L operatornak.
2. Ha dimE+s (λ) + dimE−u (λ) < 2, akkor λ ∈ σ(L).
3. Ha dimE+s (λ) + dimE−u (λ) = 2 es dim(E+
s (λ) ∩ E−u (λ)) = 0, akkor λ regulariserteke az L operatornak.
4. Ha dimE+s (λ) + dimE−u (λ) = 2 es dim(E+
s (λ) ∩ E−u (λ)) > 0, akkor λ sajatertekeaz L operatornak.
Az utazo hullam stabilitasa
Tekintsuk ismet az U : R→ R fuggvenyre vonatkozo
U ′′ + cU ′ + f(U) =0 (9.27)
U(−∞) = U−, U(+∞) =U+, (9.28)
utazo hullam egyenletet, ahol f ∈ C1(R,R), U−, U+ ∈ R, es tegyuk fel hogy c ≥ 0 (ezU− es U+ felcserelesevel elerheto). Az U stabilitasat meghatarozo, linearizalassal kapottoperator
L(V ) = V ′′ + cV ′ + f ′(U)V. (9.29)
A q(y) = f ′(U(y)) fuggveny folytonos, es ±∞-ben van hatarerteke:
q+ = f ′(U+), q− = f ′(U−). (9.30)
Ha az U fuggveny ±∞-ben exponencialisan tart az U+ es U− hatarertekekhez, (amialtalaban teljesul), akkor a 9.5.. Tetelben szereplo integralok konvergensek. Az A±λ mat-rixok esetunkben 2× 2 meretuek, es a µ1,2 sajatertekuket meghatarozo karakterisztikusegyenletuk
µ2 + cµ+ q± − λ = 0. (9.31)
Az operator lenyeges spektrumanak meghatarozasahoz szukseg van azon λ ertekekre,melyekre n+
c (λ) ≥ 1 es n−c (λ) ≥ 1. Ha n+c (λ) ≥ 1, akkor µ = iω megoldasa a (9.31)
egyenletnek. Ezt behelyettesıtve a (9.31) egyenletbe kapjuk, hogy azon λ ertekek, me-lyekre n+
c (λ) ≥ 1, a
P+ = λ1 + iλ2 ∈ C | λ1 = q+ −(λ2
c
)2
(9.32)
181

parabolan helyezkednek el. Konnyen lathato, hogy a parabola bal oldalan dimE+s (λ) =
2, a jobb oldalan pedig dimE+s (λ) = 1, ezt tuntettuk fel a 9.2.2. abran. Hasonloan, azon
λ ertekek, melyekre n−c (λ) ≥ 1 a
P− = λ1 + iλ2 ∈ C | λ1 = q− −(λ2
c
)2
. (9.33)
parabolan helyezkednek el. Konnyen lathato, hogy a parabola bal oldalan dimE−u (λ) =0, a jobb oldalan pedig dimE−u (λ) = 1, szinten a 9.2.2. abra szerint.
A (9.29) fuggveny-egyutthatos operator spektruma. A P+ es P− parabolakat a (9.32),(9.33) kepletek hatarozzak meg. A felso szamok az E+
s (λ) alter dimenziojat, az alsoszamok pedig az E−u (λ) alter dimenziojat mutatjak.
A 9.5.. Tetelt, illetve a 9.8.. Kovetkezmenyt felhasznalva az L operator spektrumaraaz alabbi tetelt kapjuk.
Tetel 9.9.. • A P+ es P− parabolak, valamint a kozottuk levo tartomany alkotja azL operator lenyeges spektrumat. Ha q+ > q−, akkor a parabolak kozotti tartomanyminden pontja sajatertek (lasd 9.2.2a. abra), ha viszont q+ < q−, akkor egyik semaz (lasd 9.2.2b. abra).
• A parabolaktol balra fekvo tartomany minden pontja az L operator regularis erteke.
• A parabolaktol jobbra fekvo tartomany minden pontja az L operatornak vagy regu-laris erteke vagy izolalt sajaterteke.
182

Esetunkben azt is el lehet donteni analitikusan (numerikus kozelıtes nelkul), hogy ajobboldali komplex felsıkban vannak-e izolalt sajatertekek. (Az izolalt sajatertekeketazonban csak numerikusan lehet kiszamıtani.)
Legyen λ izolalt sajatertek a V sajatfuggvennyel. Ekkor igazolhato, hogy a w(x) =V (x) exp(cx/2) fuggvenyre w ∈ L2(R) es
lim±∞
w = lim±∞
w′ = 0. (9.34)
Differencialas utan pedig azt kapjuk, hogy
w′′ + (q(x)− c2
4)w = λw. (9.35)
Ezt az egyenletet megszorozva w konjugaltjaval, majd integralva −∞-tol +∞-ig a
+∞∫−∞
(q(x)− c2
4)|w(x)|2 − |w′(x)|2dx = λ
+∞∫−∞
|w(x)|2 (9.36)
egyenletet kapjuk. Ezek alapjan a kovetkezo Allıtasokat tudjuk igazolni.
Allıtas 9.1. Az L operator izolalt sajatertekei valosak, kisebbek a max |q|−c2/4 szamnal,es mindegyikhez egydimenzios sajatalter tartozik.
Bizonyıtas. A (9.36) egyenletben minden integral valos, ezert λ is valos. Felteheto, hogy∫ +∞−∞ |w(x)|2 = 1, ezert ismet a (9.36) egyenletbol λ < max |q| − c2/4. Legyenek V1 es V2
a λ sajatertekhez tartozo sajatfuggvenyek. Megmutatjuk, hogy ezek egymas konstans-szorosai. Legyenek wi(x) = Vi(x) exp(cx/2), i = 1, 2. Felhasznalva a w fuggvenyekrevonatkozo (9.35) egyenletet
(w′1w2 − w1w′2)′= w′′1w2 − w1w
′′2 = 0.
Ezert a w′1w2−w1w′2 fuggveny konstans. A (9.34) peremfeltetelek miatt w′1w2−w1w
′2 = 0,
ıgy egy olyan szakaszon, melyen w2 nem tunik el azt kapjuk, hogy (w1/w2)′ = 0, azazw1/w2 konstans fuggveny. A (9.35) egyenlet megoldasanak egyertelmusege miatt w1 esw2 egymas konstansszorosai, ıgy ez a V1 es V2 fuggvenyekre is igaz.
Allıtas 9.2. Legyenek λ1 es λ2 az L operator izolalt sajatertekei a V1 es V2 sajatfugg-vennyel.
• Legyenek y1 es y2 a V2 egymast koveto gyokei. Ha V1 nem nulla a zart [y1, y2]intervallumban, akkor λ1 > λ2.
• Ha sem V1 sem V2 nem valt elojelet (egesz R-ben), akkor λ1 = λ2 es a V1 es V2
fuggvenyek egymas konstansszorosai.
183

Bizonyıtas. Vezessuk be ismet a wi(x) = Vi(x) exp(cx/2), i = 1, 2 fuggvenyeket, amelyekkielegıtik a (9.35) egyenletet. Szorozzuk meg a w1 fuggvenyre vonatkozo egyenletet w2-vel, a a w2 fuggvenyre vonatkozo egyenletet w1-gyel, majd ezeket vonjuk ki egymasbol.Ekkor az alabbi egyenlethez jutunk
w′′1w2 − w1w′′2 = (λ1 − λ2)w1w2.
Integraljuk ezt az egyenletet y1-tol y2-ig. Parcialis integralas utan, felhasznalva, hogyw2(y1) = w2(y2) = 0 kapjuk a
w′2(y1)w1(y1)− w′2(y2)w1(y2) = (λ1 − λ2)
∫ y2
y1
w1w2 (9.37)
osszefuggest. Felteheto, hogy az (y1, y2) intervallumon a w1 es w2 fuggveny is pozitıv, azelobbirol azt is tudjuk, hogy az intervallum vegpontjaiban is pozitıv. Mivel a w2 fuggvenya ket gyok kozott pozitıv, azert w′2(y1) > 0 es w′2(y2) < 0. (A szigoru egyenlotlensega megoldas egyertelmusegebol kovetkezik, hiszen ha peldaul w′2(y1) = 0 lenne, akkorw2(y1) = 0 miatt a w2 a konstans nulla fuggveny lenne.) A (9.37) bal oldala tehatpozitıv. Mivel a jobb oldalon az integral pozitıv, azert λ1 − λ2 > 0, amit bizonyıtaniakartunk.
A masodik resz igazolasahoz is a (9.37) osszefuggest hasznaljuk, ezuttal y1 = −∞,y2 = +∞ a szereposztas. Ekkor (9.37) bal oldala nulla, ıgy mivel a jobb oldali integralnem nulla, azert λ1 − λ2 = 0. A 9.1. Allıtas szerint ezen λ1 sajatertekhez tartozosajatalter egydimenzios, tehat a V1 es V2 fuggvenyek egymas konstansszorosai.
Allıtas 9.3. Az L operator legnagyobb izolalt sajatertekehez tartozo sajatfuggvenyneknincs gyoke, azaz felteheto, hogy pozitıv.
Bizonyıtas. Vezessuk be az
I(w) =
+∞∫−∞
(q(x)− c2
4)w(x)2 − w′(x)2dx, w ∈ L2(R),
+∞∫−∞
|w(x)|2 = 1
funkcionalt. Igazolhato, hogy az L operator legnagyobb izolalt sajaterteke az I funkcionalmaximuma. Tegyuk fel, hogy a w fuggvenynek van gyoke. Ekkor legyen w egy olyanfuggveny, amely a gyok egy kornyezeten kıvul megegyezik a w fuggvennyel, egy szukebbkornyezetben viszont azonosan nulla. Igazolhato, hogy a kornyezetet elegendoen kicsirevalasztva I(w) > I(w). Ezert, ha w a legnagyobb izolalt sajatertekhez tartozik, akkorez adja I maximumat, ıgy nem lehet gyoke.
Emlekeztetunk arra, hogy a nulla az L operatornak sajaterteke az U ′ sajatfugvennyel,amint ez (9.27) derivalasbol azonnal kovetkezik. Ha U ′ elojelet valt, akkor a 9.3. Al-lıtas szerint nem 0 a maximalis sajatertek, azaz az L operatornak van pozitıv izolalt
184

sajaterteke. Ha viszont U ′ nem valt elojelet, akkor a 9.2. Allıtas szerint a 0 egyszeressajatertek, es a tole linearisan fuggetlen sajatfuggvenyek elojelet valtanak, ıgy az azok-hoz tartozo sajatertekek negatıvak. Ezzel tehat az L operator izolalt sajatertekeirol akovetkezo allıtast igazoltuk.
Tetel 9.10.. • Ha U ′ elojelet valt, akkor az L operatornak van pozitıv sajaterteke.
• Ha U ′ nem valt elojelet, akkor az L operatornak a 0 egyszeres sajaterteke, a tobbiizolalt sajatertek pedig negatıv.
Tehat linearizalas segıtsegevel a 9.4.., 9.9.. es 9.10.. Tetelek alapjan az utazo hullamstabilitasarol az alabbi tetelt kapjuk.
Tetel 9.11.. Ha az U fuggveny szigoruan monoton, es teljesul f ′(U−) < 0 valamintf ′(U+) < 0, akkor az utazo hullam stabilis. Ha az U fuggveny nem monoton, akkor azutazo hullam instabilis.
Bizonyıtas. Mivel az U fuggveny szigoruan monoton, azert U ′ nem valt elojelet, ıgya 9.10.. Tetel szerint az L operatornak a 0 egyszeres sajaterteke, a tobbi izolalt sa-jatertek pedig negatıv. A 9.9.. Tetelben szereplo, lenyeges spektrumot meghatarozoparabolak a negatıv felsıkban fekszenek f ′(U−) < 0 es f ′(U+) < 0 miatt (ezek a szamokadjak a parabolak valos tengellyel valo metszespontjait). Tehat teljesul az L operatorspektrumara a 9.4.. Tetelben szereplo feltetel, ıgy az utazo hullam stabilis.
Ha az U fuggveny nem monoton, akkor U ′ elojelet valt, ıgy a 9.10.. Tetel szerint azL operatornak van pozitıv sajaterteke.
Vegul vizsgaljuk meg mit ad stabilitasi tetelunk a KPP-tıpusu allando elojelu, es azFHN-tıpusu, azaz elojelvalto f eseteben.
Az FHN esetben (mint peldaul f(u) = u(1− u)(u− a)) lattuk, hogy az utazo hullama megfelelo elsorendu rendszerben ket nyeregpontot osszekoto palyahoz tartozik, es csakegyetlen c ertek eseteben letezik. A fazissık vizsgalataval egyszeruen belathato, hogyezen palya menten U ′ allando elojelu, azaz U szigoruan monoton. Esetunkben U− = 1es U+ = 0, ıgy teljesul az f ′(U−) < 0 es f ′(U+) < 0 feltetel. A 9.11.. Tetel szerint tehataz FHN esetben az egyetlen utazo hullam megoldas stabilis.
A KPP esetben, amikor f(u) = u(1 − u), lattuk, hogy az utazo hullam a megfeleloelsorendu rendszerben c > 0 eseten letezik, es ekkor egy nyeregpontbol egy stabil cso-mopontba, vagy fokuszpontba befuto palyahoz tartozik. Ha 0 < c < 2, akkor a palyastabil fokuszpontba fut be, ıgy a palya menten U nem monoton, tehat az utazo hullammegoldas instabilis. Ha c ≥ 2, akkor a palya stabil csomopontba fut be, es a palyamenten U ′ allando elojelu. Azonban ebben az esetben U− = 1 es U+ = 0, ıgy f ′(U−) < 0es f ′(U+) > 0, tehat a 9.11.. Tetel nem alkalmazhato a stabilitas vizsgalatara. Amintkiderul, lasd Fife konyveben [10] a 4.5 szakaszban, az utazo hullam a 9.2.. Definıcio ertel-meben nem stabilis, azonban a minimalis sebesseghez tartozo hullam a (9.19) egyenletbendefinialt ertelemben stabilis.
185

Irodalomjegyzek
[1] Alligood, K.T., Sauer, T.D., Yorke, J.A., Chaos, an introduction to dynamicalsystems, Springer-Verlag, New York, 1996.
[2] Arnold, V.I., Kozonseges differencialegyenletek, Muszaki Konyvkiado, Budapest,1987.
[3] Arnold, V.I., A differencialegyenletek elmeletenek geometriai fejezetei, MuszakiKonyvkiado, Budapest, 1988.
[4] Arnold, V.I., Afrajmovich, V.S., Il’yashenko, Yu. S., Shil’nikov, L.P., Bifurcationtheory and catastrophe theory, Springer, 1999.
[5] Carr, J., Applications of center manifold theory, Springer-Verlag, New York, 1981.
[6] Cazenave, T., Haraux, A., An introduction to semilinear evolution equations, Ox-ford UP, 1998.
[7] Chicone, C., Ordinary dfferential equations with applications, Springer, New York,2006.
[8] Chow, S-N., Hale, J.K., Methods of bifurcation theory, Springer, New York, 1982.
[9] Coppel, W.A., Dichotomies in stability theory, Lect. Notes Math. 629, Springer,1978.
[10] Fife, P.C., Lecture notes in biomathematics, Springer, 1979.
[11] Guckenheimer, J., Holmes, P., Nonlinear Oscillations, Dynamical Systems andBifurcations of Vector Fields, Springer-Verlag, New York, 1983.
[12] Hale, J., Kocak, H., Dynamics and Bifurcations, Springer-Verlag, New York, 1991.
[13] Hatvani, L., Krisztin, T., Makay, G., Dinamikus modellek a kozgazdasagtanban,Poligon, Szeged, 2001.
[14] Henry, D., Geometric theory of semilinear parabolic equations, Springer, 1981.
186

[15] Hirsch, M.W., Smale, S., Devaney, R.L., Differential equations, dynamical systems,and an introduction to chaos, Elsevier, Academic Press, San Diego, 2004.
[16] Hubbard, J.H., West, B.H., Differential Equations: A Dynamical Systems Appro-ach, Springer, New York, 1995.
[17] Kuznetsov, Y.A., Elements of applied bifurcation theory, Springer, New York, 1995.
[18] Pazy, A., Semigroups of linear operators and applications to partial differentialequations, Springer, New York, 1983.
[19] Perko, L., Differential Equations and Dynamical Systems, Springer, New York,2008.
[20] Robinson, C. , Dynamical Systems. Stability, Symbolic Dynamics, and Chaos, RCRPress, Boca Raton, 1999.
[21] Robinson, J.C., Infinite-dimensional dynamical systems. An introduction to dissi-pative parabolic PDEs and the theory of global attractors, Cambridge UP, 2001.
[22] Seydel, R. Practical bifurcation and stability analysis, From equilibrium to chaos,Springer, New York, 1994.
[23] Simon, P.L., On the structure of spectra of travelling waves, Electr.J. Qual. Theor.Diff. Eqns. 15 (2003), 1-19.
[24] Simon, P.L., Farkas, H., Wittmann, M., Constructing global bifurcation diagramsby the parametric representation method, J. Comp. Appl. Math 108, 157-176(1999).
[25] Smoller, J.A., Shock waves and reaction diffusion equations, Springer, 1994.
[26] Toth, J., Simon, P.L., Differencialegyenletek; Bevezetes az elmeletbe es az alkalma-zasokba, Typotex, Budapest, 2009.
[27] Wiggins, S., Introduction to applied nonlinear dynamical systems and chaos, Sprin-ger, New York, 1990.
187