
Developable Surface Fitting to Point Clouds Martin Peternell Computer Aided Geometric Design...
57
Developable Surface Fitting to Point Clouds Martin Peternell Computer Aided Geometric Design 21(2004) 785-803 Reporter: Xingwang Zhang June 19, 2005
-
Upload
trever-whitcraft -
Category
Documents
-
view
215 -
download
1
Transcript of Developable Surface Fitting to Point Clouds Martin Peternell Computer Aided Geometric Design...

Developable Surface Fitting to Point Clouds
Martin Peternell Computer Aided Geometric
Design 21(2004) 785-803
Reporter: Xingwang ZhangJune 19, 2005

About Martin Peternell
Affiliation Institute of Discrete Mathematics and Geometry Vienna University of Technology
Web http://www.geometrie.tuwien.ac.at/peternell
People Helmut Pottmann Johannes Wallner etc.
Research Interests
Classical Geometry Computer Aided Geometric
Design Reconstruction of geometric
objects from dense 3D data Geometric Computing Industrial Geometry
Overview
Problem Developable surfaces Blaschke model Reconstruction of Developable
Surfaces Q&A
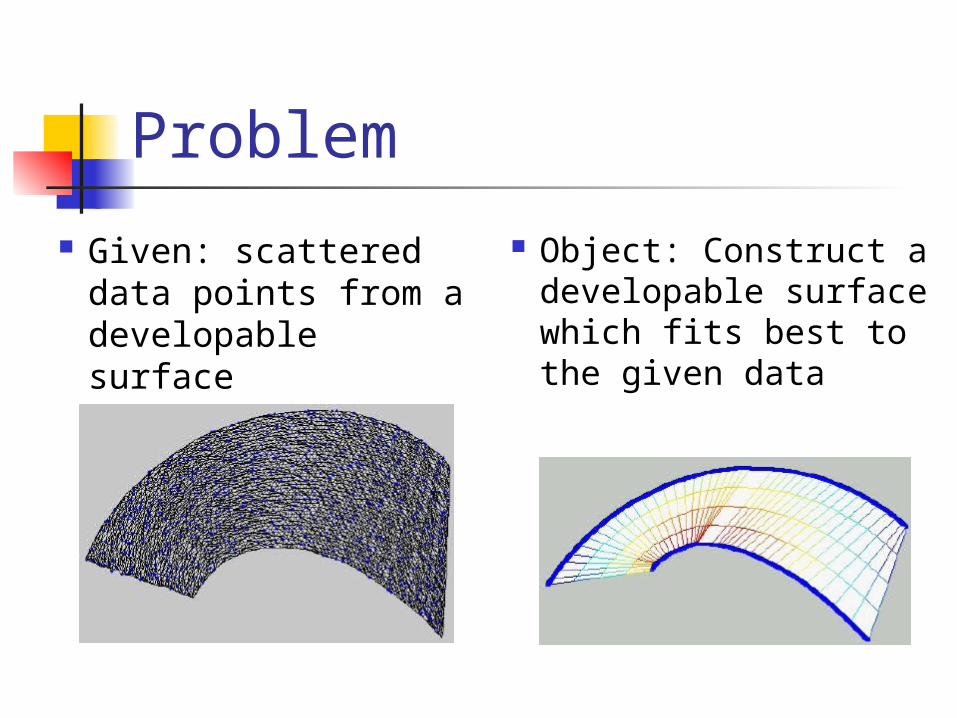
Problem
Given: scattered data points from a developable surface
Object: Construct a developable surface which fits best to the given data

Ruled Surface( , ) ( ) ( )u v u v u x c e
directrix curve ( ) :ue
( ) :uc
a
generator
A ruled surface
Normal vector
( , ) ( ) ( ) ( ) ( )u v u u v u u n c e e e

Developable Surface Each generator all points have the
same tangent plane. Vectors and are
linearly dependent Equivalent condition
c e e e
det( , , ) 0c e e
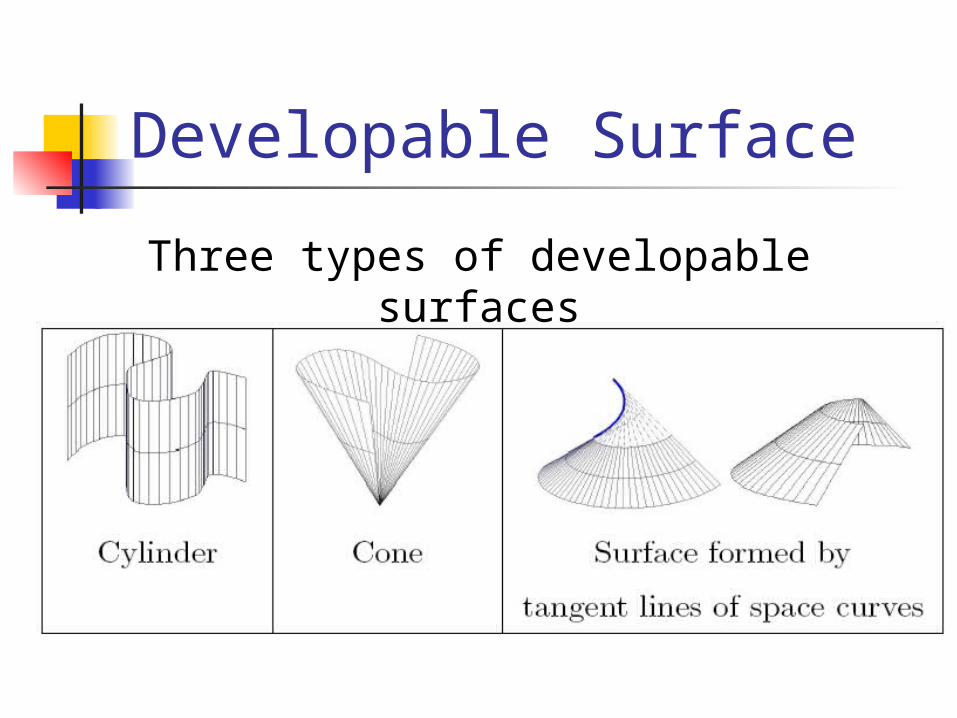
Developable Surface
Three types of developable surfaces

Geometric Properties of Developable Surface
Gaussian curvature is zero Envelope of a one-parameter
family of planes
Dual approach: is a curve in dual projective 3-space.
4 1 2 3( ) : ( ) ( ) ( ) ( ) 0u n u n u x n u y n u z T
( )uT

Singular Point A singular point doesn’t possess a
tangent plane. Singular curve is
determined by the parameter( ) ( , )su u vs x
2
( ) ( ).
( )sv
c e e e
e e
Three Different Classes
Cylinder: singular curve degenerates to a single point at infinity
Cone: singular curve degenerates to a single proper point, called vertex
Tangent surface: tangent lines of a regular space curve, called singular curve
Literature
[Bodduluri, Ravani, 1993] duality between points and planes in 3-D space
[Pottmann, Farin, 1995] projective algorithm, dual representation
[Chalfant, Maekawa, 1998] optimization techniques [Pottmann, Wallner, 1999] a curve of dual
projective 3-D space [Chu, Sequin, 2002] boundary curve, de Casteljau
algorithm, equations [Aumann, 2003] affine transformation, de Casteljau
algorithm
General Fitting Technique
Estimating parameter values Solving a linear problem in the
unknown control points
fitting unorganized data points
Find an developable B-spline surface
1n( , ) ( ) ( )i j iju v N u N vb b
kp
( , )i ju v
ijb

Two Difficult Problems Sorting scattered data
Estimation of data parameters Estimation of approximated direction
of the generating lines Guaranteeing resulting fitted
surface is developable Leading a highly non-linear side
condition in the control points
Contributions of this Paper Avoid the above two problems
Reconstruction of a 1-parameter family of planes close to the estimated tangent planes of the given data points
Applicable Nearly developable surfaces Better slightly distorted developable
surfaces

Blaschke Model
Blaschke Model
An oriented plane in Hesse normal form:
Defining Blaschke mapping:
Blaschke cylinder:
2 2 21 2 3 1 2 3: 0, 1E n x n y n z d n n n
1 2 3: ( ) ( , , , ) ( , )b E b E n n n d d n
2 2 21 2 3: 1B u u u
Incidence of Point and Plane
A fixed point , planes passing through this point
Image points lie in the three space
The intersection of is an ellipsoid.
1 2 3( , , )p p pp : 0E d n x
1 1 2 2 3 3 0p n p n p n d d p n
1 2 3( ) ( , , , )b E n n n d
1 1 2 2 3 3 4: 0H p u p u p u u
H B
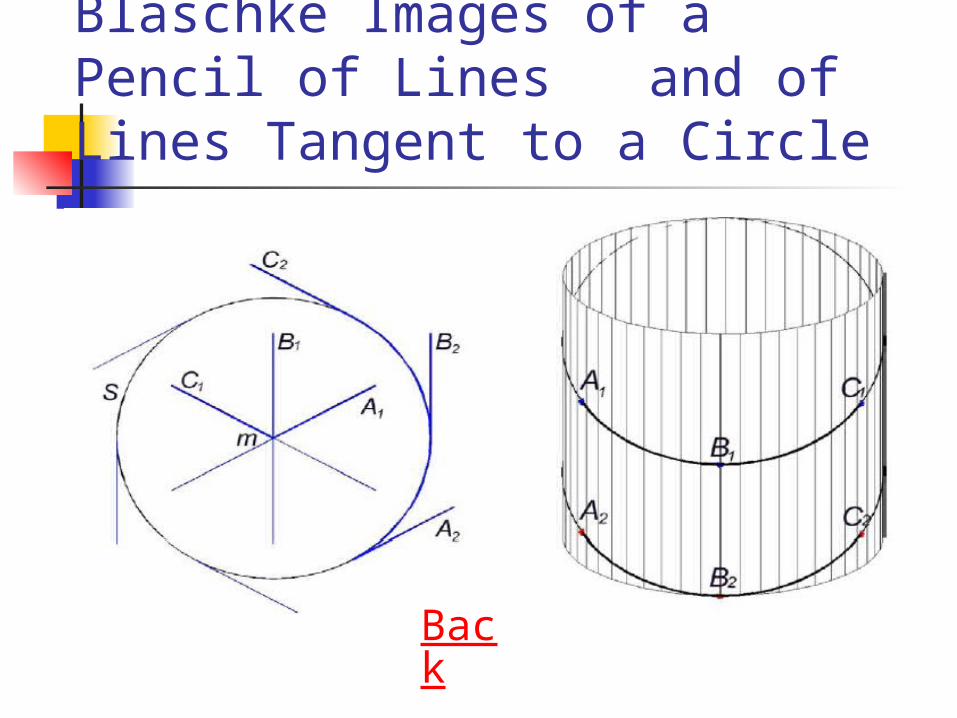
Blaschke Images of a Pencil of Lines and of Lines Tangent to a Circle
Back
Tangency of sphere and plane
oriented sphere with center and signed radius
Tangent planes:
Blaschke image of tangent planes:
S mr 2 2: ( ) 0r S x m
1 1 2 2 3 3: n m n m n m d d r ST n m
1 1 2 2 3 3 4: 0mu m u m u u r H
Offset operation Maps a surface (as set of
tangent planes) to its offset at distance
is the offset surface of at distance Appearing in the Blaschke image as
translation by the vector See Figure
3F
rF rS m r
B(0,0,0, )r

Laguerre Geometry satisfy :
inverse Blaschke image tangent to a sphere
form a constant angle with the direction vector
1 2 3 4( , , , )q q q q q B
0 1 1 2 2 3 3 4 4: 0a u a u a u a u a H
1( )bT = q
4 0.a
4 0.a
01 2 3
4 4
1( , , ),
aa a a r
a a m
T
T1 2 3( , , )a a aa =

The Tangent Planes of a Developable Surface
be a 1-parameter family of planes
Generating lines: Singular curve: Blaschke image is a curve
on the Blaschke cylinder
( )uT
4 1 2 3( ) : ( ) ( ) ( ) ( ) 0u n u n u x n u y n u z T
( ) ( ) ( ) ( )u u u u L T T T
( ) ( ) ( )u u u L T T
( ) ( )b u b DT
B
Classification
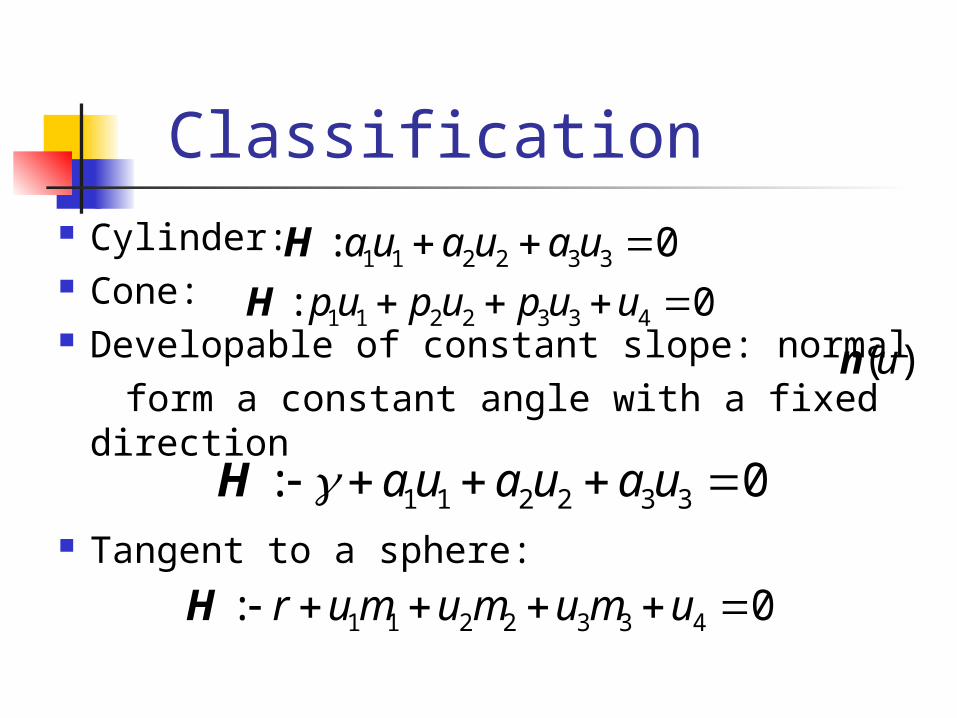
Classification Cylinder: Cone: Developable of constant slope: normal form a constant angle with a fixed
direction Tangent to a sphere:
1 1 2 2 3 3: 0a u a u a u H
1 1 2 2 3 3 4: 0p u p u p u u H
1 1 2 2 3 3: 0a u a u a u H
( )un
1 1 2 2 3 3 4: 0r u m u m u m u H
Recognition of Developable Surfaces from Point Clouds
Estimation of Tangent Planes
, triangles , adjacent points Estimating tangent plane at Best fitting data points , MIN Original surface with measurement
point developable, form a curve-like
region on
p jt kq
T p
kq ( , )kdist q T
ip( )ib T
B
A Euclidean Metric in the Set of Planes
Distance between and
Geometric meaning:
: intersection of with sphere
( , )dist E F E F1 2 3 4 1 2 3 4: 0, : 0e x e y e z e f x f y f z f E F
42 2
1( , ) ( )i ii
dist e f
E F
: 0x m F ( ) (1,0,0, )b m F ( , )dist rE F
( )b E
2 2 2 2 21 2 3 4( 1) ( )u u u u m r
B
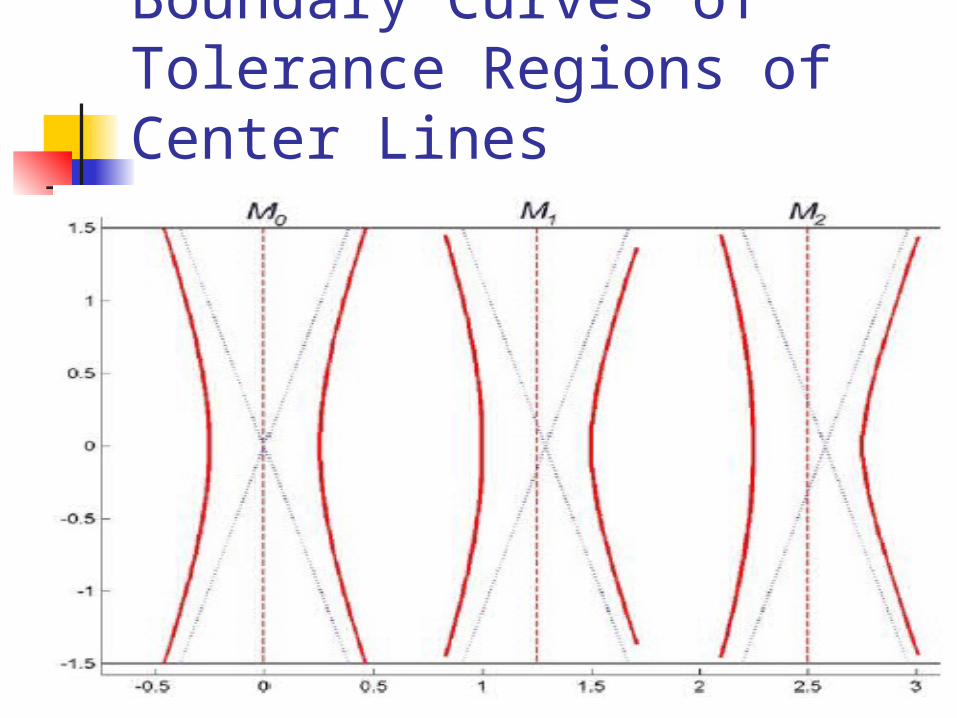
Boundary Curves of Tolerance Regions of Center Lines
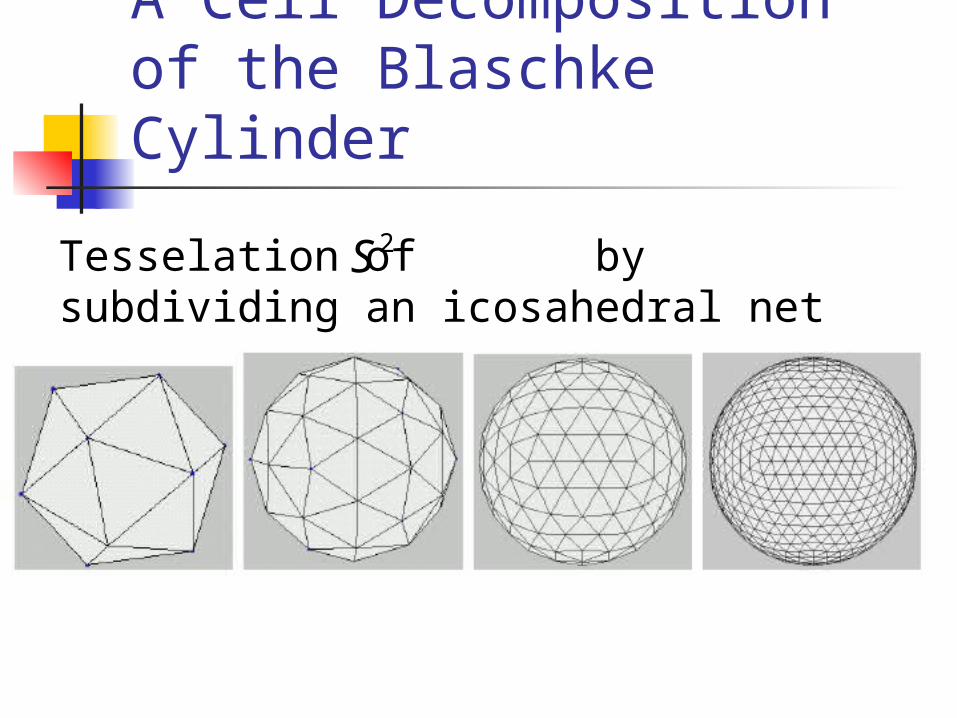
A Cell Decomposition of the Blaschke Cylinder
Tesselation of by subdividing an icosahedral net
2S

A Cell Decomposition of the Blaschke Cylinder (continued)
Cell structure on the Blaschke cylinder 20 triangles, 12 vertices, 2 intervals 80 triangles, 42 vertices, 4 intervals 320 triangles, 162 vertices, 8 intervals 1280 triangles, 642 vertices, 16 intervals
B
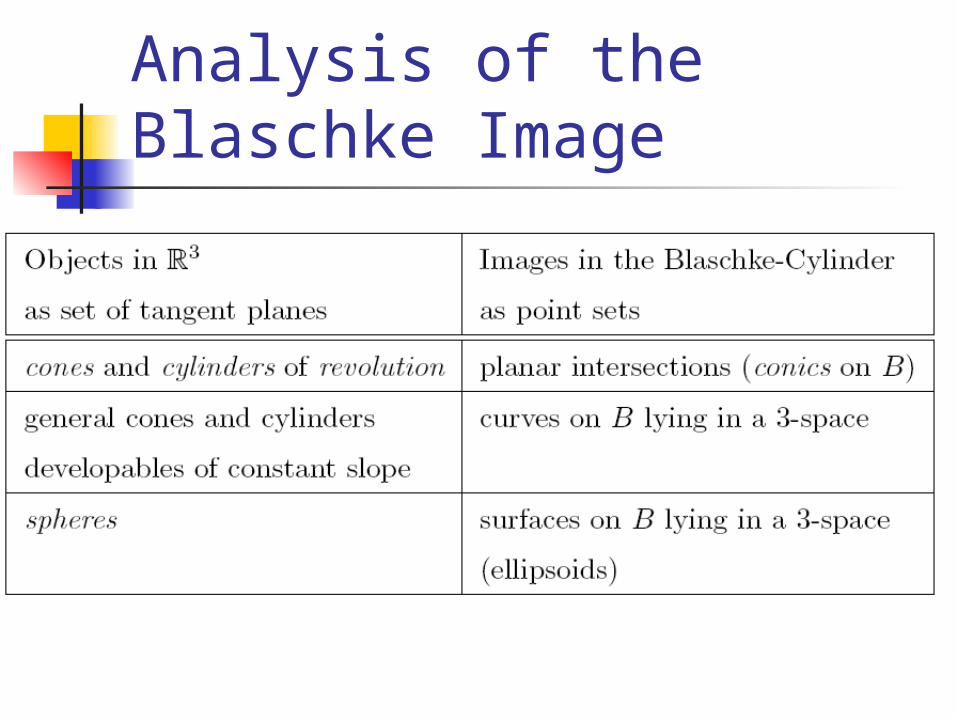
Analysis of the Blaschke Image
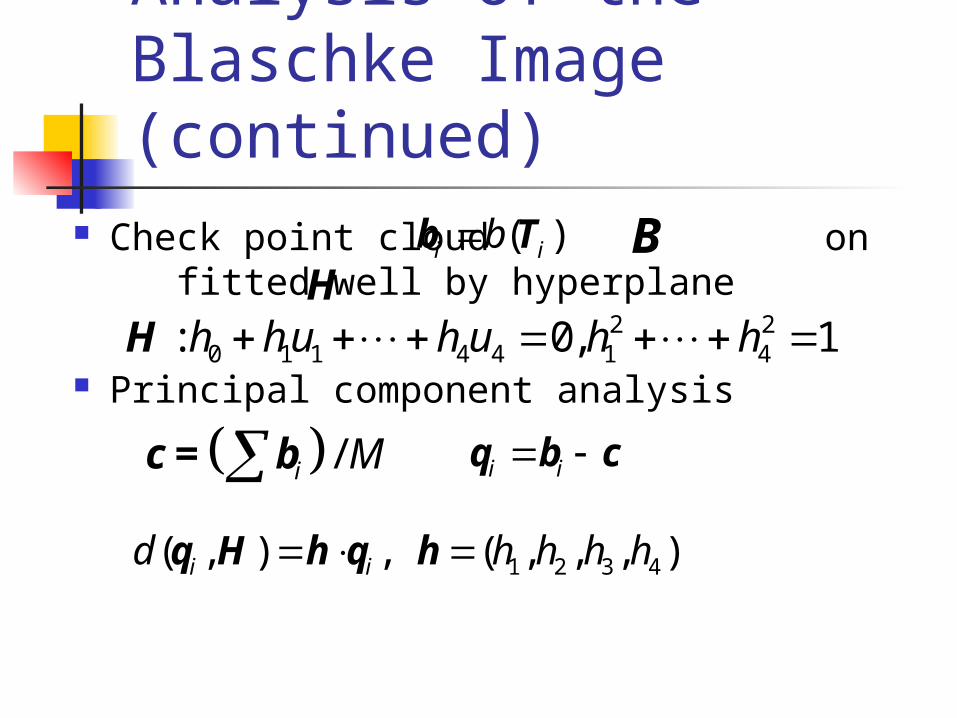
Analysis of the Blaschke Image (continued)
Check point cloud on fitted well by hyperplane
Principal component analysis
( )i ibb T BH
2 20 1 1 4 4 1 4: 0, 1h hu h u h h H
/i Mc = b i i q b c
1 2 3 4( , ) , ( , , , )i id h h h h q H h q h

Principal Component Analysis (continued)
Minimization
Eigenvalue problem
2 21 2 3 4
1 1
1 1( , , , ) ( , ) ( )
M M
i ii i
F h h h h dM M
q H h q
1
1( ) , :
MT T
i ii
F C CM
h h h q q
1 2 3 4Deviations: 1 2 3 4Eigenvalues:
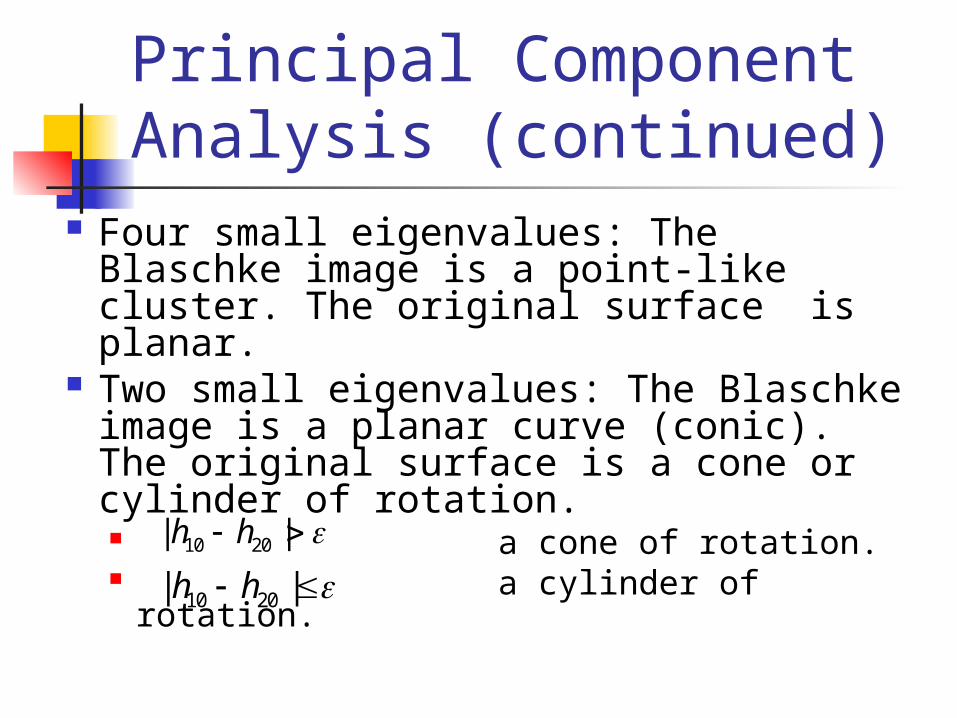
Principal Component Analysis (continued)
Four small eigenvalues: The Blaschke image is a point-like cluster. The original surface is planar.
Two small eigenvalues: The Blaschke image is a planar curve (conic). The original surface is a cone or cylinder of rotation. a cone of rotation. a cylinder of rotation.
10 20| |h h
10 20| |h h

Principal Component Analysis (continued)
One small eigenvalue and curve-like Blaschke image. The original surface is developable. a general cone a general cylinder a developable of constant slope.
One small eigenvalue and surface-like Blaschke-image: The original surface is a sphere.
10| |h
14| |h 10 14| | ,| |h h
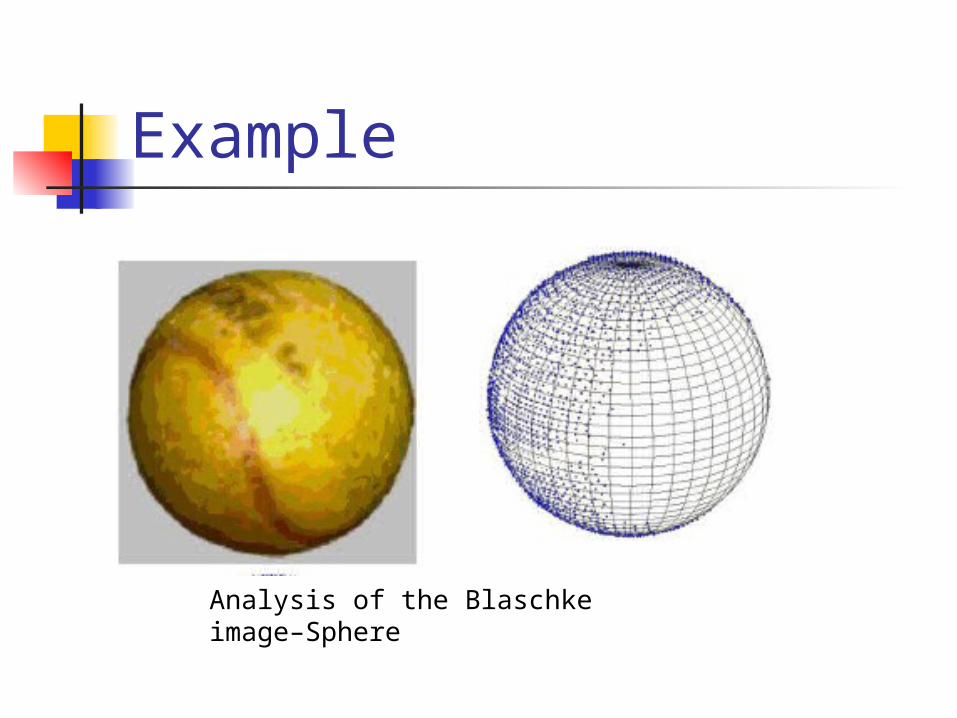
Example
Analysis of the Blaschke image–Sphere
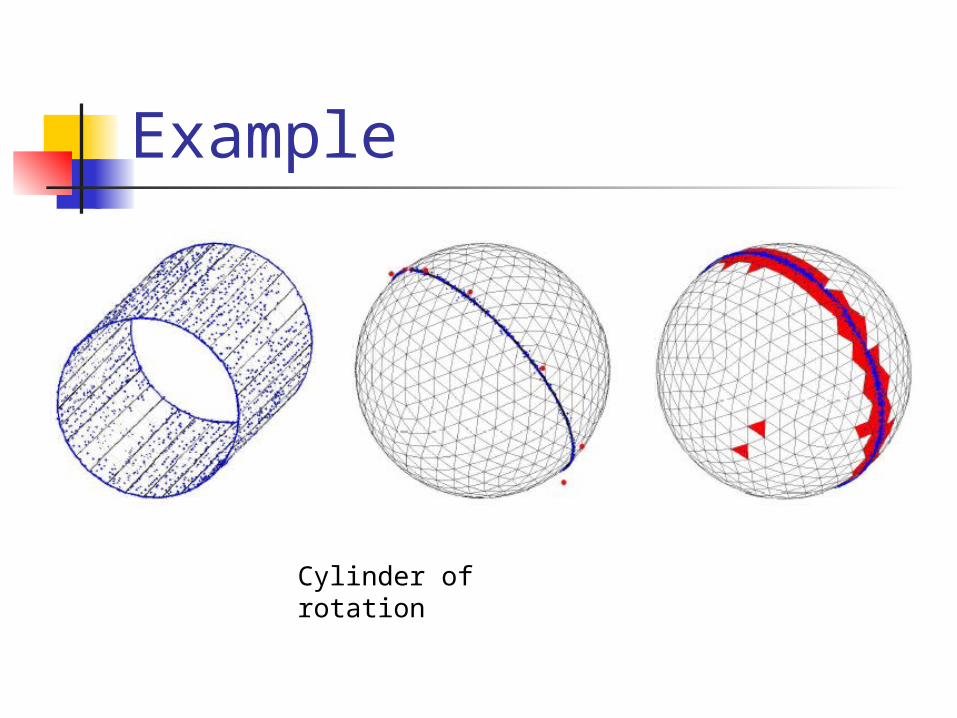
Example
Cylinder of rotation

Example
Approximation of a developable of constant slope

Example
General cylinder
Triangulated data points and approximation
Original Blaschke image

Example
Developable of constant slope
Triangulated data points and approximation
Spherical image of the approximation with control points.

Reconstruction of Developable Surfaces from Measurements

Reconstruction Find a curve fitting best the
tubular region defined by Determine 1-parameter family of
tangent planes determined by Compute a point-representation of the
corresponding developable approximation of the data points
( )ib T
D*
( )t c B
( )tc( )tE

Parametrizing a Tubular Region
Determine relevant cells of carrying points
Thinning of the tubular region: Find cells carrying only few points and delete these cells and points
Estimate parameter values for a reduced set of points (by moving least squares: marching through the tube)
Compute an approximating curve on w.r.t. points
( , , , )i i i i ia b c dC
B
kC
( )tc BkC
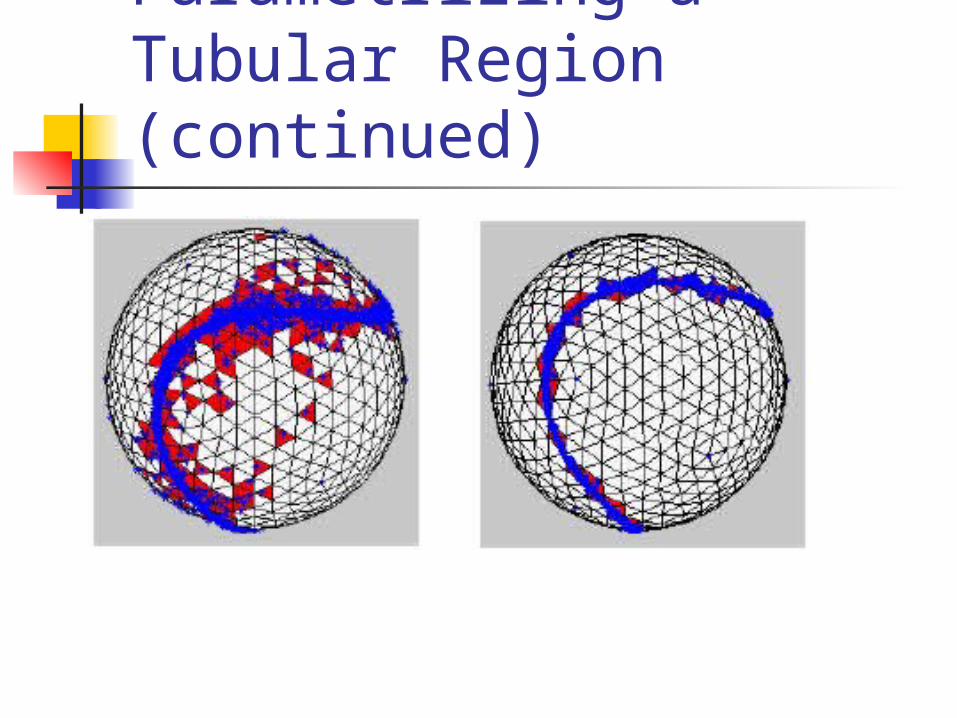
Parametrizing a Tubular Region (continued)
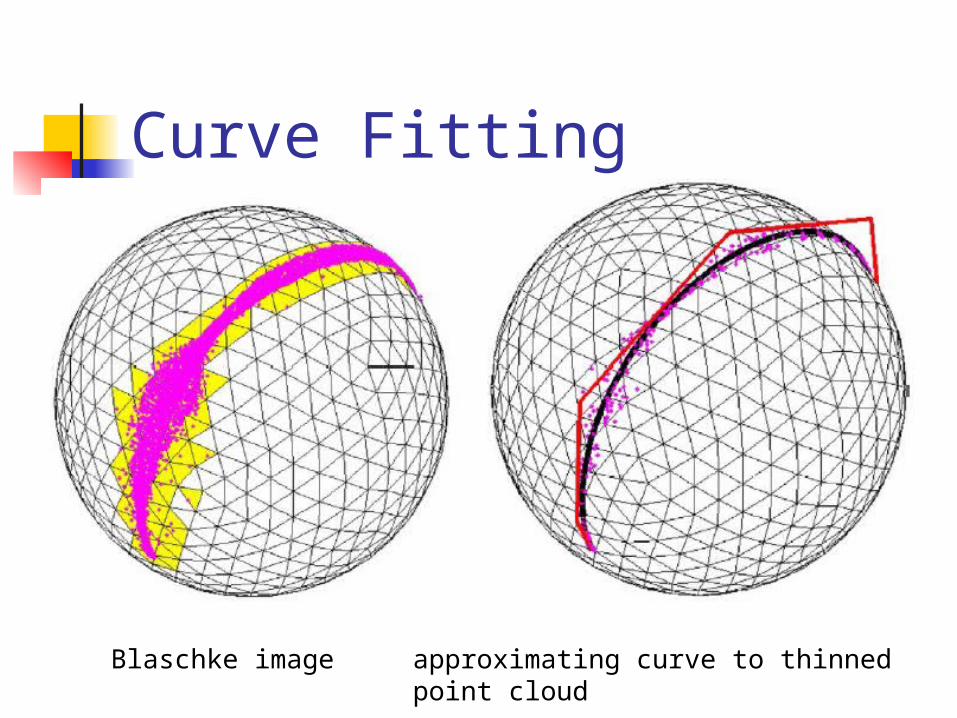
Curve Fitting
Blaschke image approximating curve to thinned point cloud

Curve Fitting (continued)
support function (fourth coordinate)
A Parameterization of the Developable Surface
Approximating curve on determines the planes
Compute planar boundary curves in planes (bounding box):
Point representation of :
( ) ( ) ( )i it t t k E E H
4 1 2 3( ) : ( ) ( ) ( ) ( ) 0t c t c t x c t y c t z E
1 2 3 4( ) ( , , , )( )t c c c c tc B
( )i tkiH
D
1 2( , ) (1 ) ( ) ( )t u u t u t x k k
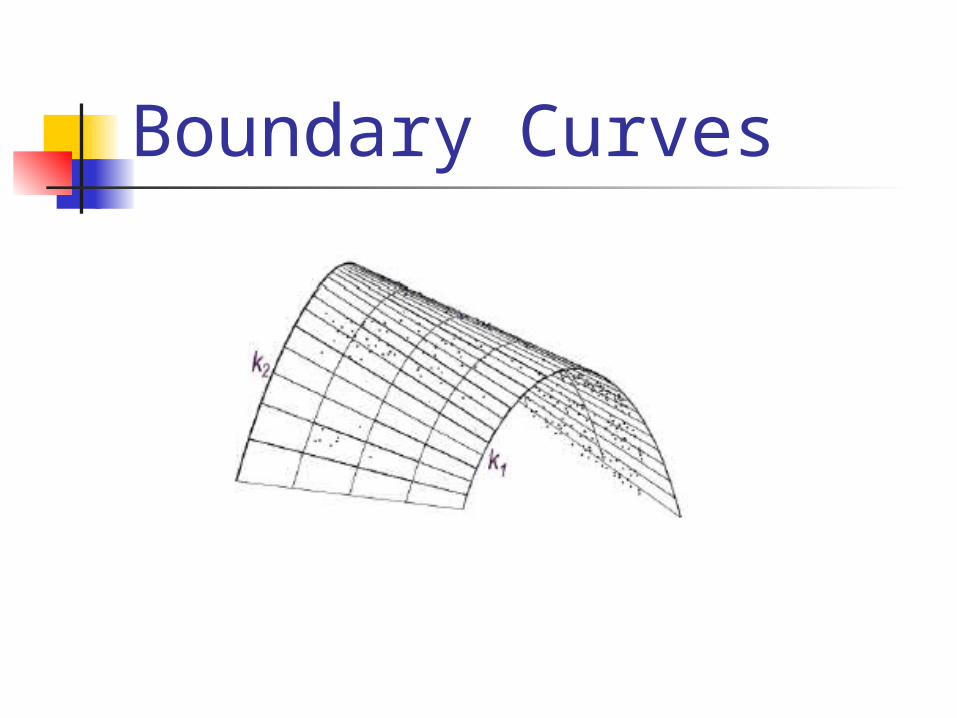
Boundary Curves
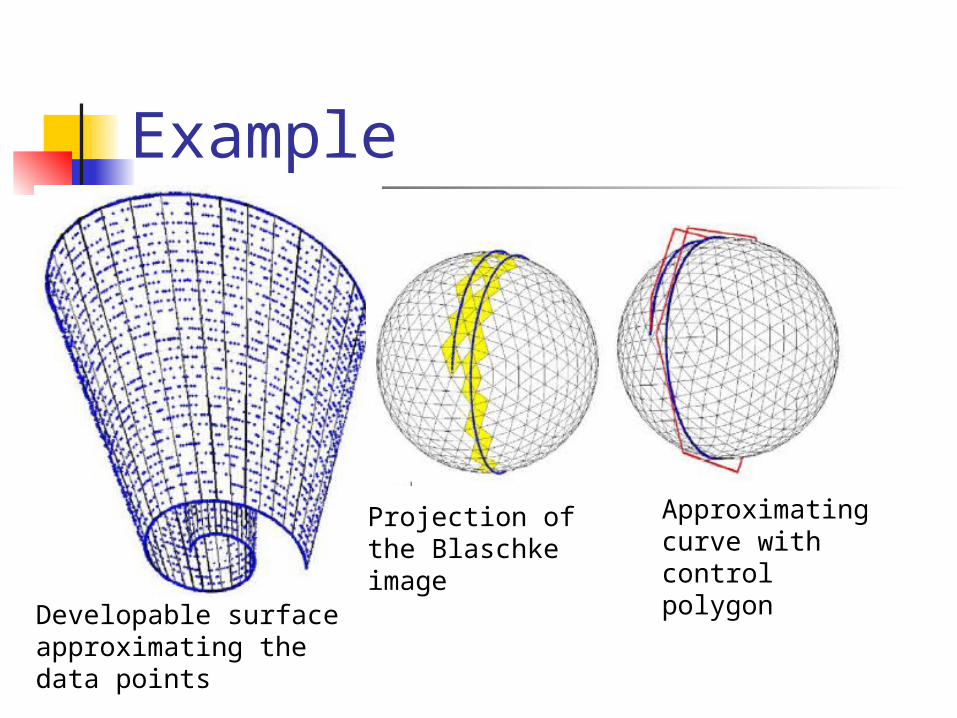
Example
Developable surface approximating the data points
Projection of the Blaschke image
Approximatingcurve with control polygon
Deviation Distance between estimated planes
and the approximation
Distance between measurements and the approximation
2 21( , *) dist ( , ( ))i i
i
d tN
D D p E
2 21( , *) dist ( , ( ))i i
i
d tN
D D T E
, 1, ,i i N T*D
ip
*D
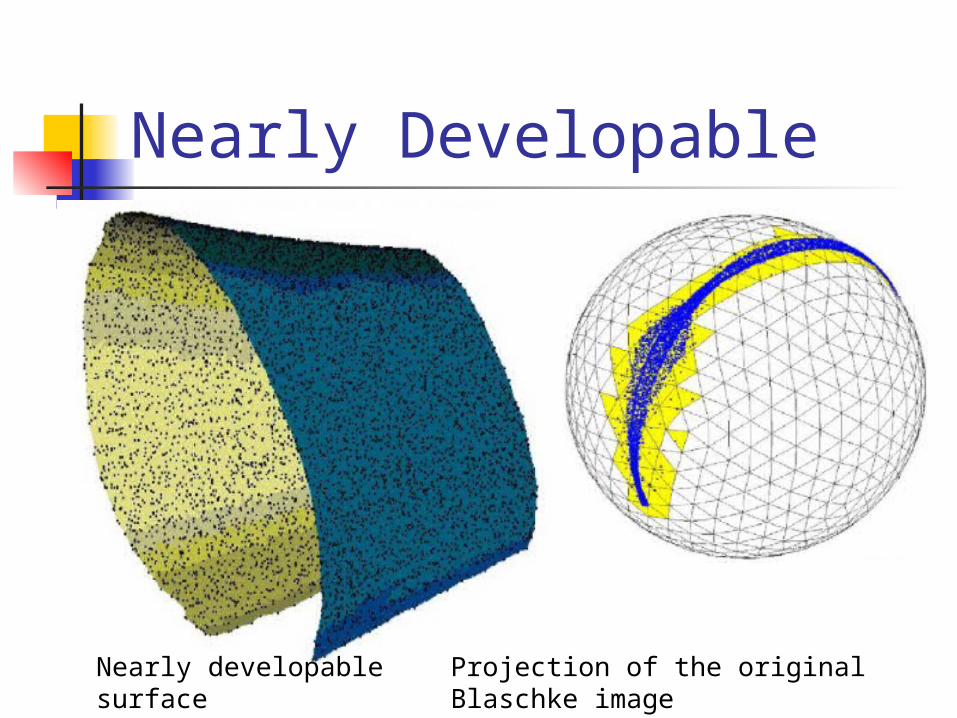
Nearly Developable
Nearly developable surface
Projection of the original Blaschke image
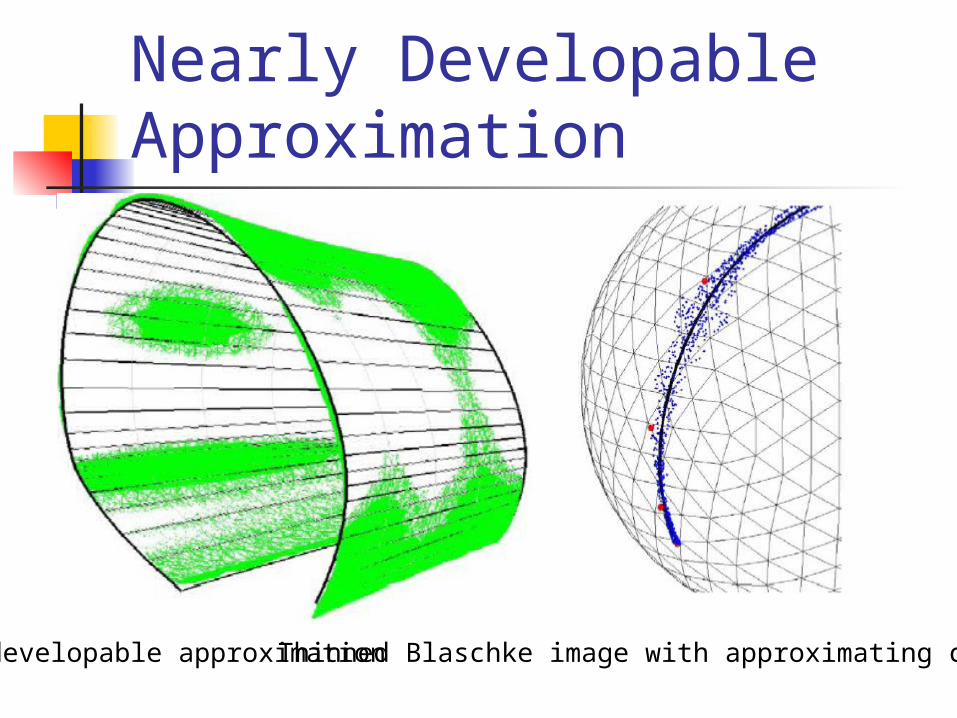
Nearly Developable Approximation
developable approximationThinned Blaschke image with approximating curve
Singular Points Singular points
Data Points satisfy Singular points have to satisfy Singular curve is in the outer
region of the bounding box.
( ) ( ) ( ) ( )t t t t s E E E
1 2 3 4 1 2 34
1( , , , ) ( ) ( ( ), ( ), ( ))
( )n n n n t n t n t n t
n t n c c c = s
ip 1i p( ) 1t s
( )ts
Conclusions Advantages
Avoiding estimation of parameter values Avoiding estimation of direction of
generators Guaranteeing approximation is
developable Improving avoidance of singular points etc.

Q&A
Questions?

Thanks all!Thanks all!Especial Especial
thanks to Dr thanks to Dr Liu’s helpLiu’s help
Thanks all!Thanks all!Especial Especial
thanks to Dr thanks to Dr Liu’s helpLiu’s help


















