DC-DCコンバータの 制御設計...R. W. Ericson and D. Maksimovic, “Fundamentals of Power...
40
DC-DCコンバータの 制御設計 松田順一 1 2015年2月23日 群馬大学
Transcript of DC-DCコンバータの 制御設計...R. W. Ericson and D. Maksimovic, “Fundamentals of Power...

DC-DCコンバータの 制御設計
松田順一
1
2015年2月23日
群馬大学

概要
• はじめに(フィードバック・システム全体図)
• 伝達関数におけるネガティブ・フィードバックの効果
• クローズド・ループ伝達関数と出力インピーダンス
• 安定性 • 位相余裕 • ループ利得位相余裕とクローズド・ループ・ピーキング・ファクタとの関係 • ステップ過渡現象とピーキング・ファクタ
• レギュレータ設計 • 進み(PD)補償 • 遅れ(PI)補償 • 進みと遅れを組合わせた(PID)補償
• 降圧コンバータを用いた設計事例
• ループ利得の測定
注)本内容は、以下の文献を参考に作成
R. W. Ericson and D. Maksimovic, “Fundamentals of Power Electronics 2’nd Edition,”
2

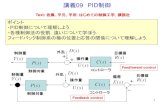
降圧コンバータのフィードバック・ループ制御
3
refv
L )(siload
C outvinv
MV1 )(sGc
outHv
)(sH
evcv
Sensor gain
PWM Compensator
Error signal
Reference input
Transistor gate driver
Switching converter
Power input
Load

フィードバック・システムの機能ブロック図
4
refv
)(tiload
) , ,(
)(
divf
tv
loadin
out
)(tvin
cv )(td
Sensor gain
PWM Compensator
Error signal
Reference input
Input voltage
Output voltage
Load current
)(tvout
)(tve
Disturbances
Control input
Switching converter

小信号コンバータ・モデル
)(:1 DM eL
)(~
si loadC)(
)(
~
~
sv
sv
out
C
R)(~
svin )(~
sdj 0)(
0)(
~
~
,
~
~
)(
)()(
si
sv
out
dout
load
insd
svsG
0)(
0)(
~
~
,
~
~
)(
)()(
si
sdin
out
inout
load
sv
svsG
0)(
0)(
~
~
~
~
)(
)()(
sv
sdload
out
out
in
si
svsZ
)(~
sde制御~出力伝達関数
入力~出力伝達関数
出力インピーダンス Converter M(D) Le e(s) j(s)
Buck
Boost
Buck-boost
D
22 '1
D
sDL
D
VC
L
'
1
D
'D
D
2'D
L
2'D
L
RD
sLVC 2'
1
2D
V
R
V
RD
V2'
RD
V2'
)()()()()()()(~~
,
~
,
~
sisZSvsGSdsGsv loadoutininoutdoutout
5

制御ブロック図を付加した小信号コンバータ・モデル
6
)(~
svref
)(:1 DM eL
)(~
si loadC )(~
svout R)(~
svin )(~
sdj
)(~
sde
MV1)(sGc
)()(~
svsH out
)(sH
)(~
sve )(~
svc
)(~
sd
Sensor gain
PWM Compensator
Error signal
Reference input
)(~
svVv refrefref
)(~
svVv eee etc.

完全ブロック図で表した小信号コンバータ・モデル
7
)(~
svref
)(~
si load
)(~
svout
)(~
svin
MV1)(sGc
)()(~
svsH out
)(sH
)(~
sve )(~
svc )(~
sd
Sensor gain
PWM Compensator
Error signal
Reference input
AC line variation
Output voltage variation
Load current variation )(sZout
)(, sG inout
)(, sG dout
Mdoutc
outload
Mdoutc
inoutin
Mdoutc
Mdoutcrefout
VGGH
Zi
VGGH
Gv
VGGH
VGGvv
,
~
,
,~
,
,~~
111
)(~
svVv refrefref
)(~
svVv eee etc.
T
Zi
T
Gv
T
T
Hvv out
loadinout
inrefout
111
1 ~,
~~~
ループ利得 :)()()()( , Mdoutc VsGsGsHsT
Converter power stage

フィードバックがある場合の伝達関数と出力インピーダンス
8
)(1
)(
)(
)( ,
0)(
0)(
~
~
~
~ sT
sG
sv
sv inout
si
svin
out
load
ref
フィードバックがある場合の入力~出力伝達関数(クローズド・ループ)
関数オープン・ループ伝達 :)(, sG inout
フィードバックがある場合の出力インピーダンス(クローズド・ループ)
)(1
)(
)(
)(
0)(
0)(
~
~
~
~ sT
sZ
si
sv out
sv
svload
out
in
ref
)(1
1
sTオープン・ループ伝達関数が だけ低減
出力インピーダンスが だけ低減 )(1
1
sT
インピーダンスオープン・ループ出力 :)(sZout

フィードバックがある場合の参照電圧~出力伝達関数
9
フィードバックがある場合の参照電圧~出力伝達関数(クローズド・ループ)
)(1
)(
)(
1
)(
)(
0)(
0)(
~
~
~
~ sT
sT
sHsv
sv
si
svref
out
load
in
の場合、≫ 1)(sT
)(
1
)(
)(
0)(
0)(
~
~
~
~ sHsv
sv
si
svref
out
load
in
)0(
1
)0(1
)0(
)0(
1
HT
T
HV
V
ref
out
DCで
gainsensor DC:)0(H
参照電圧 DC :refV
出力電圧 DC :outV
めにはに正確に追従させるたを refout VV
大正確、 :)0(: ),0( TVH ref
の場合、≫ 1)0(T
の影響を無視できる
)( , ),( , sGVsG doutMc

ループ利得例
10
1
2
11
0
11
1
)(
ppp
z
ss
Q
s
s
TsT
1pf
zf
cf2pf
dBQdB0T
dB/dec 20dB/dec 40
dB/dec 40Crossover
frequency
frequency)Crossover ( 1at : Tffc
Hz 120
kHz 14
Hz 32
2
1
z
p
p
f
f
f
10
5000
Q
T

クローズド・ループ参照電圧~出力伝達関数近似
11
T
T
T
1
1pf
zf
cf2pf
dB/dec 20
dB/dec 40
cc f fTf fT for 1 ,for 1
(高周波)≪
(低周波)≫
1for
1for 1
1 TT
T
T
T
)(
1
)(1
)(
)(
1
)(
)(
0)(
0)(
~
~
~
~ sHsT
sT
sHsv
sv
si
svref
out
load
in
⇒フィードバック・ループが良好に寄与
低周波
高周波
M
doutc
si
svref
out
V
sGsG
sH
sT
sT
sT
sHsv
sv
load
in
)()(
)(
)(
)(1
)(
)(
1
)(
)( ,
0)(
0)(
~
~
~
~
⇒フィードバック・ループが寄与していない

クローズド・ループ入力~出力伝達関数と出力インピーダンス近似
12
cc f fTf fT for 1 ,for 1
(高周波)≪
(低周波)≫
1for 1
1for T
1
1
1
T
T
T
c
inoutinout
si
svin
outff
sT
sG
sT
sG
sv
sv
load
ref
for )(
)(
)(1
)(
)(
)( ,,
0)(
0)(
~
~
~
~
coutout
sv
svload
outff
sT
sZ
sT
sZ
si
sv
in
ref
for )(
)(
)(1
)(
)(
)(
0)(
0)(
~
~
~
~
クローズド・ループ入力~出力伝達関数
クローズド・ループ出力インピーダンス
T1
1
1pf
zf
cf2pf
dBQdB0T
dB/dec 20dB/dec 40
dB/dec 40
dBQdB0T
dB/dec 20dB/dec 40
T
⇒1/ǁT(s)ǁ倍になる
⇒1/ǁT(s)ǁ倍になる
cinout
inout
si
svin
outffsG
sT
sG
sv
sv
load
ref
for )()(1
)(
)(
)(,
,
0)(
0)(
~
~
~
~
coutout
sv
svload
outffsZ
sT
sZ
si
sv
in
ref
for )()(1
)(
)(
)(
0)(
0)(
~
~
~
~
⇒オープン・ループと変わらない
⇒オープン・ループと変わらない

安定性
13
T
Zi
T
Gv
T
T
Hvv out
loadinout
inrefout
111
1 ~,
~~~
フィードバックがシステムを不安定にする場合
下記小信号成分の分母 1+T(s) ⇒ RHPに根を持つ
は多項式で表されると有理関数とすると )()( :)(
)()( :)( sDsN
sD
sNsTsT
)()(
)(
)(
)(1
)(
)(
)(1
)(
sDsN
sN
sD
sN
sD
sN
sT
sT
)()(
)(
)(
)(1
1
)(1
1
sDsN
sD
sD
sNsT
2式で同じポールを持つ(∵分母が同じ多項式 N(s)+D(s) )
N(s)+D(s) ⇒ RHPにある根の数は T(s) から決定(Nyquist安定性定理)
⇒ T(s) の位相余裕を調べることで安定性が分かる

安定性(位相余裕テスト)
14
1pf
zf cf
T
T
m
1dB 12 cfjT
)2(180 : cmm fjT 位相余裕 ポールなし一個、 RHP: )(: s Tfc
ポールなし(安定)
) (但し、と
RHP
0 111
mTTT
83m
1pf2pf
cf
T
T
m
60m
安定 0 m
不安定 0 m

f0 近傍でよく近似されるループ利得の位相余裕と大きさ
15
20
1
1)(
sssT
210 f
102f
0f
dB/dec 20
dB/dec 40
T
T
m20
2
0
1
1
)(
11
1
)(1
)(
ss
sT
sT
sT
2
1
1
cc
s
Q
s
90 2 mf
0 02 mf
2f
90
cc f 220
2
00
c
Q
⇒クロスオーバー周波数 f0 近傍で良い近似
クローズド・ループ伝達関数
ループ利得
⇒ 2次のポール

クローズド・ループ伝達関数(T/(1+T))の大きさの漸近線
16
低Q近似 高Q近似 20 ff ≪
0 cQ 2
Q
c
T
T
1
0f
dB/dec 20
dB/dec 40
T
2f
20 fffc
cffQ 0
T
T
1
0f
dB/dec 20
dB/dec 40
T
2f
20 fffc
cffQ 0
20 ff

ループ利得位相余裕 φm とクローズド・ループ・ピーキング・ファクタ Q との関係
17
m
mQ
sin
cos
4
4
1
2
411tan
Q
Qm
dB 6 5.0 Q
dB 0 1 Q 52m
76m
76 5.0 mQ )実数のポール(
20
1
1)(
sssT
lc
lcm jT
21tan)180()(
1at Tlc
1
2
0
22
20
2
lclc
180tan 21
T
20 1 QTTクローズド・ループ:
)( : sTループ利得 52 1 mQ

ステップ応答過渡現象
18
14tan2
14sin
14
21)( 21
2
2
2~
QtQ
Q
Q
Qetv c
Qtc
tteetv 21
21
1
12
2~
1)(
2
21 4112
c
5.0Q
5.0Q
5.0Q
3.0Q
1.0Q05.0Q
01.0Q
2Q
4Q
10Q
1Q
sTT 1 1 へのステップ入力伝達関数
76 5.0 mTQ の位相余裕
オーバーシュートを起こさない

レギュレータ設計概要
19
・負荷電流の変化による出力電圧の変化を許容内にする )(1
)(
)(
)(
0)(
0)(
~
~
~
~ sT
sZ
si
sv out
sv
svload
out
in
ref
⇒クローズド・ループ出力インピーダンスの最大値を決定する
・入力電圧の変化による出力電圧の変化を許容内にする
)(1
)(
)(
)( ,
0)(
0)(
~
~
~
~ sT
sG
sv
sv inout
si
svin
out
load
ref
⇒クローズド・ループ入力電圧~出力電圧伝達関数の最大値を決定する
(ループ利得 T により低減)
(ループ利得 T により低減)
・過渡応答時間を許容内にする (過渡応答時間:急な負荷電流または入力電圧の変化に対する出力電圧の許容を超える変化が、許容された出力電圧に戻るまでの時間)
⇒フィードバック・ループのクロスオーバー周波数を増大する
・オーバーシュート・リンギングを許容内にする
⇒ループ利得の位相余裕を十分大きくする

進み補償(PD: proportional plus derivative)概要
20
進み補償:ループ利得にゼロを追加 cz ff ≪
・ゼロが高周波で誤差信号を微分する
・位相余裕を維持して、フィードバック・ループのバンド幅が延びる
・利得が+20dB/decで増加する
・伝達関数 Gc(s) は高周波ポールを持たなければならない
・実効的な増幅器は高周波でゼロに向かわなければならない
・スイッチング周波数 fs より低い領域にポールを設定する
(スイッチングノイズを抑える必要あり)
sc ff 1.0

進み補償(PD)伝達関数 Gc の大きさと位相
21
p
zcc s
s
GsG
1
1
)( 0pf
zf
pz fff max
cG
cG
pz fff max
/dec54 /dec54
0cG
10pf
10zf
zf10
0
位相余裕の最大の改善 cff max
ーバー周波数ループ利得のクロスオ:cf

進み補償(PD)の最大の位相進み θ と周波数比 fp/fz
22
2tan 1
max
p
z
z
p
cf
f
f
ffG
max fGc
sin1
sin1
z
p
f
f
sin1
sin1
cp ff
sin1
sin1
cz ff
の位相余裕での cGf max
クロスオーバー周波数 fc を変えたくない場合 ⇒ 進み補償の大きさを fc で 1 にする p
zc
f
fG 0
⇒フィードバック・ループDC利得低下
クロスオーバー周波数 fc を変えたい場合 ⇒ Gc0 の増大により、fc は増大する

2ポールのループ利得進み補償
23
2
00
0
1
)(
s
Q
s
TsT
p
z
c
c
ss
Q
s
sGT
sGsT
11
1
)()(2
00
00
p
zc
f
fG 0
T
cTG
0T
00 cGT
cTG
T
m
2ポールのループ利得伝達関数
2ポールのループ利得進み補償伝達関数
0f
zf cf
pf
zf1.0
0
漸近

遅れ補償(PI: proportional plus integral)概要
24
低周波でのループ利得を増大させる
⇒出力はDC及び十分低いループ・クロスオーバー周波数 fc 領域で良く調整される
sGsG L
cc
1)(
cG
cG
Lf10Lf
cL ff ≪
Lf1.0
90
cG
0
dec/45
dec/dB 20
・ǁGcǁ がDCで大 → DCループ利得 T(0) 大
⇒ 誤差信号のDC成分 → 0
( 定常状態の出力電圧が完全に調整される)
クローズド・ループ入力~出力伝達関数(DC)
クローズド・ループ出力インピーダンス(DC) → 0
この遅れ補償は、従来型のOPアンプを使って簡単に得られる
・ → 位相余裕は変わらない

1ポールを持つループ利得の遅れ補償
25
sGsG L
cc
1)(
0
0
1)(
s
TsT u
u
0
0
ff
GTGTT cu
cu
00 fGTf cuc 00 fT
fG
u
cc
uT
uT
0uc TG
m
0f
Lfcf
1ポールのループ利得 遅れ補償
T
T Lf10
Lf1.0 010 f
01.0 f
0f
0uT 0uc TG
0f
Lf cf
T
0f
T1
1
Lf 01 uc TG
cL ff ≪
遅れ補償有りループ利得(高周波領域)
DC: 1/(1+T) → 0
クローズド・ループ入力~出力伝達関数(DC)
クローズド・ループ出力インピーダンス(DC) → 0

PID補償
26
低周波領域(fL寄与)
PI Compensator ⇒誤差信号を積分
⇒大きな低周波ループ利得
⇒出力電圧の低周波成分を正確に調整
高周波領域(fz寄与)
PD Compensator ⇒ループ利得の位相を進める
⇒バンド幅増大
⇒位相余裕増大
(定常状態の誤差 → ゼロ)
21
11
11
)(
pp
z
L
cmc
ss
s
sGsG
1pfLf
cf
cG
zf
PID補償
cG
Lf10Lf1.0
zf1.0
zf10
2pf
110 pfdec/90 dec/90
11.0 pf
dec/45
dec/45
21.0 pf
cmG
(クロスオーバー周波数 fc 近傍)
fp1, fp2 : 利得低減に必要
(スイッチング・リップル等の高周波ノイズ低減)
21,, ppczL fffff

降圧コンバータのPID補償例
27
V 5refv
loadi
)(sGc
)(sH
3R
evcv
Compensator
Transistor gate driver
Sensor gain
3
1
15
5)(
V
VsH
ref
PWM V 4MV
V 15
)(
tvoutμF 500C
outHv
V 28
)(
tvin
μH 50L
kHz 100sf
Error signal
refout vHv 0ev
536.028
15
in
out
V
VD
14.2 Mc DVVMV
1
定常状態での関係
誤差信号

降圧コンバータPID補償の小信号モデル
28
0~
refv
)(~
si load
)(sGc)(sT
R
)(~
svc
Compensator V 4MV
)(~
svoutC
)()(~
svsH out
)(~
svin
L
MV
1
)(sH
)(~
sve
Error signal
D:1
~
2d
D
Vout
~
dR
Vout
3
1H
)(~
sd

降圧コンバータのオープン・ループ伝達関数と出力インピーダンス
29
LCsR
Ls
D
VsG out
dout2
,
1
1)(
2
000
0,
1
1)(
s
Q
sGsG ddout
dBV 29 V 280 D
VG out
d
kHz 12
1
2
00
LCf
dBV 5.19 5.90 L
CRQ
dBV 5.190 QdoutG ,
doutG ,
kHz .1 110 0
21 0 fQ
Hz 90010 0
21 0
fQ
オープン・ループ制御~出力伝達関数 オープン・ループ入力~出力伝達関数
オープン・ループ出力インピーダンス
LCsR
Ls
DsG inout2
,
1
1)(
2
000
0,
1
1)(
s
Q
sGsG ininout DGin 0
LCsR
Ls
sLsL
sCRsZout
21
//1
//)(
これらの伝達関数と出力インピーダンスは 同じポールを持つ
dBV 290 dG

降圧コンバータ小信号システム・ブロック図
30
0)(~
svref
)(~
si load
)(~
svout
)(~
svin
MV1)(sGc
)()(~
svsH out
)(sH
)(~
sve )(~
svc )(~
sd
Sensor gain
PWM Compensator
Error signal
Reference input
AC line variation
Load current variation )(sZout
)(, sG inout
)(, sG dout
Converter power stage
)(sT
3
1)( sH
)()(1
)()( , sHsGV
sGsT dout
M
c
LCsR
Ls
D
V
V
sHsGsT out
M
c
21
1)()()(
ループ利得

ループ利得に進み補償(PD)追加
31
dB 5.190 QuT
uT
kHz .1 110 0
21 0 fQ
Hz 90010 0
21 0
fQ
LCsR
Ls
TsT uu2
0
1
1)(
補償されていないループ利得 1)( sGc
dB 4.7 33.20 M
outu
DV
HVT
dB 4.70 uT
kHz 10 f
kHz 5 kHz 8.1 cc ff クロスオーバー周波数
位相余裕 )1( 52 5 Qmm クローズド・ループ
kHz 100sf
kHz 7.1)52sin(1
)52sin(1)kHz 5(
zf
kHz 5.14)52sin(1
)52sin(1)kHz 5(
pf
kHz 5at dB 0 dB -20.6 0.093
2
00u
c
c
u ff
fTT
kHz 5at dB 3.11 3.7 1
2
00
0
c
p
zc
u
c ff
f
f
f
TG
kHz 8.1cf
kHz 5
増加)確保(で① dB 6.20 0dB 5kHz)( cf
を確保を変えずに② )1( 52 kHz) 5( Qf mc ① ②
pz
cc
ssGsG
11)( 0
進み補償

進み補償(PD)を含むループ利得
32
p
z
cc
s
s
GsG
1
1
)( 0
LCsR
Ls
s
s
GTsT
p
z
cu
2
00
11
1
)(
0 zf1.0
cG
zfcf
pf
pf1.0zf10
0cG
cG
z
p
cf
fG 0
0 zf1.0
T
zf
cf
pf
52m
dB 18.7 6.8 T
T
0f
zf10
kHz .1 1
Hz 900
pf1.0
進み補償 進み補償を含むループ利得
dB 5.190 Q

進み補償(PD)に関する ǁ1/(1+T)ǁ の形成
33
)(1
)(
)(
)( ,
0)(
0)(
~
~
~
~ sT
sG
sv
sv inout
si
svin
out
load
ref
クローズド・ループ入力~出力伝達関数
T
zf
cf
pf
dB 18.7 6.8 T
0f
dB 5.190 Q
T1
10Q
dB 18.7- 12.0/1 T
減衰追加 8.6 dB 18.7
フィードバック無しの場合(オープン・ループ)
kHz 1 for dB 18.7 11/ fT 減衰
LCsR
Ls
DsG inout2
,
1
1)(
536.0in
out
V
VD
フィードバック有りの場合(クローズド・ループ)
V 0.536 V 1~
out
~
in vv
(オープン・ループ伝達関数:降圧コンバータ)
V 0.0626.8
0.536 V 1
~
out
~
in vv
フィードバック有無の減推量比較(at f=100 kHz)

PID補償の伝達関数と、 ǁTǁ及び ǁ1/(1+T)ǁ の形成
34
T
zfcf
pf
0f
dB 5.190 Q
T1
10Q
90
Lf
cG
zfcf
pf
pf1.0 zf10
cmG
cG
zf1.0
Lf1.0Lf10
p
L
z
cmc
s
s
s
GsG
1
11
)(
LCsR
Ls
s
s
s
GTsT
p
L
z
cu
2
00
11
11
)(
PID補償 PID補償を含むループ利得 0ccm GG
Lf
Hz 500Lf
)増大(ループ利得 LL ffT zero Inverted
(出力電圧の低周波レギュレーション良好)
Hz 100at f 51500100 Lff
V 0.012 V 1~
out
~
in vv
dB 7.32 )1/(1 T

オープン・ループとクローズド・ループ入力~出力伝達関数の比較
35
2
000
0,
1
1)(
s
Q
sGsG ininout DGin 0
cout,in
out,in ffsGsT
sG
for )(
)(1
)(
c
out,inout,in ffsT
sG
sT
sG
for
)(
)(
)(1
)(
オープン・ループ伝達関数
クローズド・ループ伝達関数
0f
dB 5.190 Q
T
G inout
1
,
zf
cfLf
inoutG ,
Open loop
Closed loop
cmu GT
D
0
dB/dec 20
dB/dec 40
DG inout )0(,
cz
Lcmu
out,in
ss
s
GT
D
sT
sG
111
1
)(1
)(
0
クローズド・ループ伝達関数の近似

ループ利得の測定
36
)(~
svref
)(~
sv x)()(~
1 svsG e
)(1 sZ
)(sH
)(~
sve
A
)(sT
)(2 sZ
)()()(~~
2 svsvsG outx
)()()()(
)()()( 2
21
21 sHsG
sZsZ
sZsGsT
ブロック1 ブロック2

ループ利得の測定1
37
0)(~
svref
)(~
sv x)()(~
1 svsG e
)(1 sZ
)(sH
)(~
sve
bias DC
)(sTm
)(2 sZ
)()()(~~
2 svsvsG outx
ブロック1 ブロック2
)(~
sv y )(~
sv z
ccV
0
0
~
~
~
~
)(
)()(
in
ref
v
vx
y
m
sv
svsT )()()()( 21 sHsGsGsTm
)(
)(1)()(
2
1
sZ
sZsTsTm 12for )()( ZZsTsTm ≫
バイアス設定の問題あり:DCループ利得大⇒ バイアスの大きな変化の微小変化 DC)( svx

ループ利得の測定2(電圧注入)
38
0)(~
svref
)(~
sv x)()(~
1 svsG e
)(1 sZ
)(sH
)(~
sve
)(sTv
)(2 sZ
)()()(~~
2 svsvsG outx
ブロック1 ブロック2
)(~
sv y
)(~
sv z
)(sZ s
0
0
~
~
~
~
)(
)()(
in
ref
v
vx
y
v
sv
svsT
)(
)(
)(
)(1)()(
2
1
2
1
sZ
sZ
sZ
sZsTsTv
)(
)()( and for )()(
2
112
sZ
sZsTZZsTsTv ≫≫
)()()()(~
2
~
svsGsHsv xe )()()()()( 1
~
1
~
sZsisvsGsv ey
)(~
si
)(
)()(
2
~~
sZ
svsi
x
)(
)(1)()()()(
2
121
sZ
sZsTsHsGsG

ループ利得の測定3(電流注入)
39
0)(~
svref
)()(~
1 svsG e
)(1 sZ
)(sH
)(~
sve
)(sTi
)(2 sZ
)()()(~~
2 svsvsG outx
ブロック1 ブロック2
)(sZ s
)()()()(~
2
~
svsGsHsv xe )()()()()( 1
~
1
~
sZsisvsGsv yey
)(~
si x
)(
)()(
2
~~
sZ
svsi
xx
)(~
si y
)(~
si z
0
0
~
~
~
~
)(
)()(
in
ref
v
vx
y
i
si
sisT
)(
)(
)(
)(1)()(
1
2
1
2
sZ
sZ
sZ
sZsTsTi
)(
)()( and for )()(
1
212
sZ
sZsTZZsTsTi ≫≪
)(~
sv x
)(~
sv y
)(
)(1)()()()(
2
121
sZ
sZsTsHsGsG
)()(~~
svsv yx
)(~
sv z
sR
bC
)(~
si x)(~
si y
)(~
si z
)(sZ s
を電流源に変換 )(~
sv z

不安定なシステムでの測定
40
0)(~
svref
)()(~
1 svsG e
)(1 sZ
)(sH
)(~
sve
)(sTv
)(2 sZ)()()(
~~
2 svsvsG outx
)(sZ s
)(~
sv x)(~
sv y
extL
extR
)(~
sv z
Rextの追加 ⇒ ループ利得低下→クロスオーバー周波数低下→位相余裕増加(安定)
不具合点を見つけるための測定
システムを安定させて測定
Lextの追加⇒ Rextをバイパスすることにより、 RextによるDCバイアスへの影響を避ける
ブロック1 ブロック2


















