Coupler Design Issues from the Modular Ocean Data Assimilation Project Dr. Richard Loft...
30
Coupler Design Issues from the Modular Ocean Data Assimilation Project Dr. Richard Loft Computational Science Section Scientific Computing Division National Center for Atmospheric Research Boulder, CO USA
-
Upload
johnathan-ray -
Category
Documents
-
view
217 -
download
0
Transcript of Coupler Design Issues from the Modular Ocean Data Assimilation Project Dr. Richard Loft...
Coupler Design Issues from the Modular Ocean
Data Assimilation Project
Dr. Richard Loft
Computational Science Section
Scientific Computing Division
National Center for Atmospheric Research
Boulder, CO USA
Outline
Project Introduction– goals / pariticipants / scope– http//:iom.asu.edu
IOM: weak variational data assimilation– Inputs/outputs– Data components– Functional components
IOM Coupling design – Strategy– Details – Role of Domain Specific Languages (DSL)
Modular Ocean Data Assimilation
NSF ITR/APFocus on the OSU Inverse Ocean Model (IOM) system for ocean data assimilation. – Variational data assimilation system– Weak assimilation– Iterative algorithm for solving nonlinear
assimilation problems– Suite of diagnostics (posterior error
statistics)– 20 years in development by Bennett, et al.
Objectives of MODA Project
Enhance the IOM System with modern information technology.– Modular software design– Hybrid parallel implementation– Coupled model strategy– Automated code generation
Distribute it to the ocean modeling community.– 5 ocean modeling partners
Facilitate application of the system to coastal oceans, ocean basins and the global ocean.
NSF ITR MODA Collaboration
Arizona State U. Muccino U. Colorado MooreNCAR LoftNCSA BakerU. North Carolina LeuttichOregon State U Bennett, Egbert,
ErwigRutgers U. Arango, HaidvogelUCSD ( Scripps) Cornuelle, Miller
Institution Researcher
IOM Team Members
IOM-PEZ Parallelism– PI: Rich Loft, NCAR– Component: parallel super and Infra-structure (hybrid F90 module framework)
Domain Specific Languages– PIs: Martin Erwig & Zhu Fu, OSU– Component: automated code generator
(Haskell)
Visualization– Pis: Polly Baker, NCSA/IU– Component: VisBenchTool Visualization
Software
Participating Model Teams
PEZ (Primitive Eq. Z-coordinate) model– Description: 3D, free-surface, z-
coordinate• Bryan-Cox
– Grid: spherical polar, “B” grid– Language: F90– Parallelism: SPMD, MPI
ROMS (Regional Ocean Model System)– Description: 3D, free-surface, S-
coordinate– Grid: Horizontal orthogonal curvilinear
coordinate, “C” grid– Language: F90– Parallelism: SPMD, OpenMP, MPI, SMS
Participating Model TeamsSEOM (Spectral Element Ocean Model) – PI: Dale Haidvogel, Rutgers– Description: 3D, free-surface, S-coordinate– Grid: h-p finite element, quadrilateral
element– Language: F90– Parallelism: SPMD, MPI
ADCIRC (Advanced Circulation) model– PIs: Julia Muccino, ASU; Rich Luettich, UNC– Description: 3D, free-surface, sigma-
coordinate– Grid: finite element, linear triangular
element Language: F90– Parallelism: SPMD, MPI
Participating Model TeamsOTIS (Internal Tides)– PI: Gary Egbert, OSU– Description: Laplace tidal equations plus
10 years of TOPEX/Poseidon– Description: Solid Earth mageto-tellurics
(magnetic field of earth’s crust)
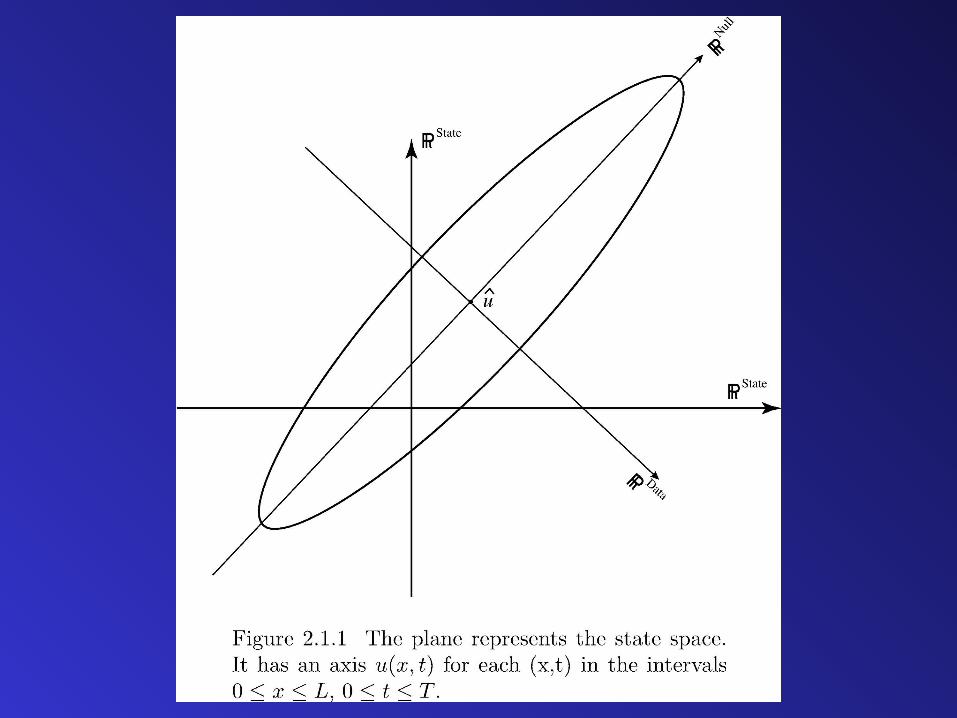
observing system– e.g. measured sea surface temperatures, isotherm
depths and surface windsdynamics – e.g. the hydrostatic primitive equations
hypothesis concerning the error– covariances of errors in the
• initial conditions• boundary conditions• and forcing
estimator – space-time integrated weighted sum of squared
errorsoptimization algorithm– iterative indirect representer algorithm
Data Assimilation Checklist: Inputs
state estimate – hindcast over the period in the data
collection– space-time fields for state variables
data residuals, dynamic residuals– Space-time minimum residuals
posterior error statistics – space-time covariances
test statistics– chi square internal consistency tests
model improvements – e.g. suggested from the distribution of errors
observing system assessment
Data Assimilation Checklist: Outputs
Inverse system data components…
Vector of data to be assimilatedTrajectories – multi-variate physical space-time fields– generated by tangent linear/adjoint
model– user prescribed
Parameters – covariance matrices – user prescribed
Inverse system functional components…
Pure data space components– iterative solver
Physical space components– tangent linear/ adjoint models
Components that map between the two spaces. – measurement operator– impulse operator
Looks like a coupled system
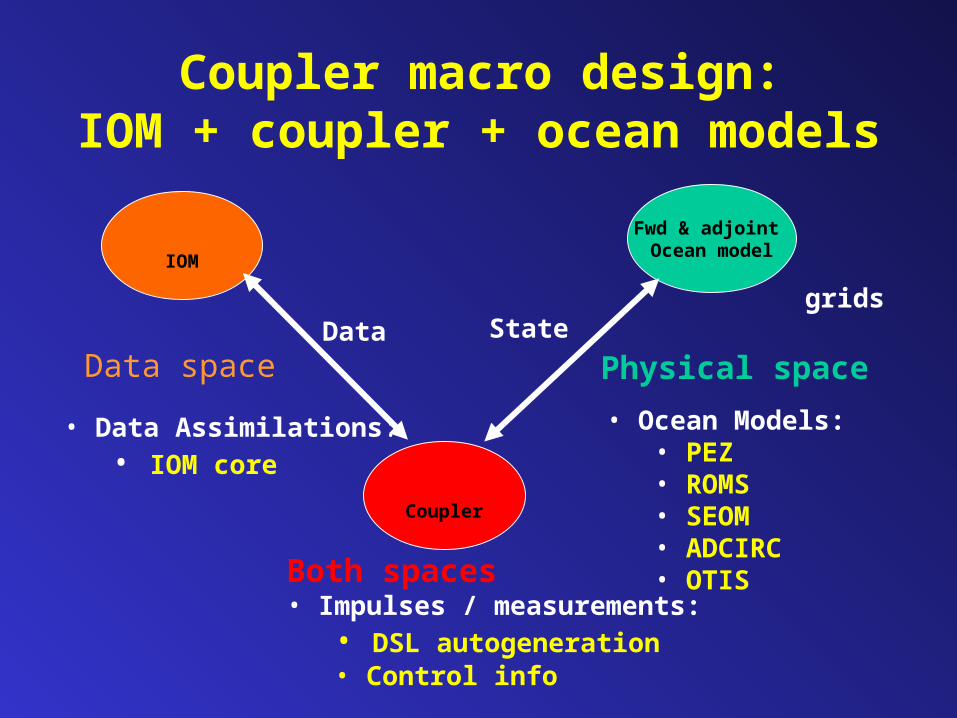
Coupler macro design: IOM + coupler + ocean models
Fwd & adjoint Ocean model
IOM
• Ocean Models:• PEZ • ROMS• SEOM • ADCIRC • OTIS
Physical spaceData space
• Data Assimilations:• IOM core
Data
Coupler
State
Both spaces• Impulses / measurements:
• DSL autogeneration• Control info
grids
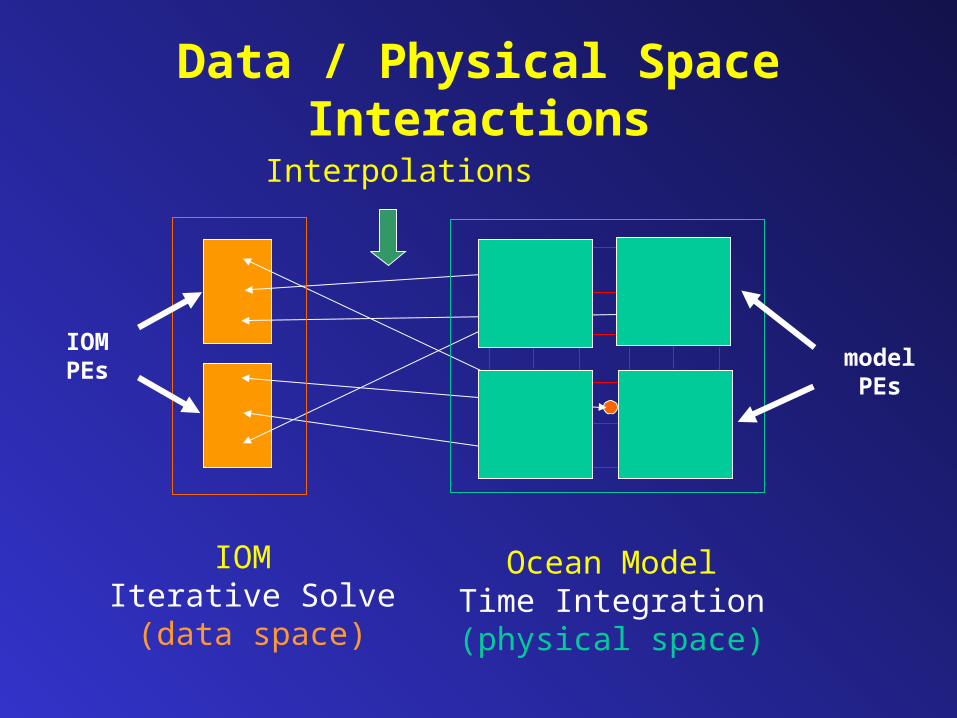
Data / Physical Space Interactions
Ocean ModelTime Integration(physical space)
IOM Iterative Solve(data space)
modelPEs
IOMPEs
Interpolations
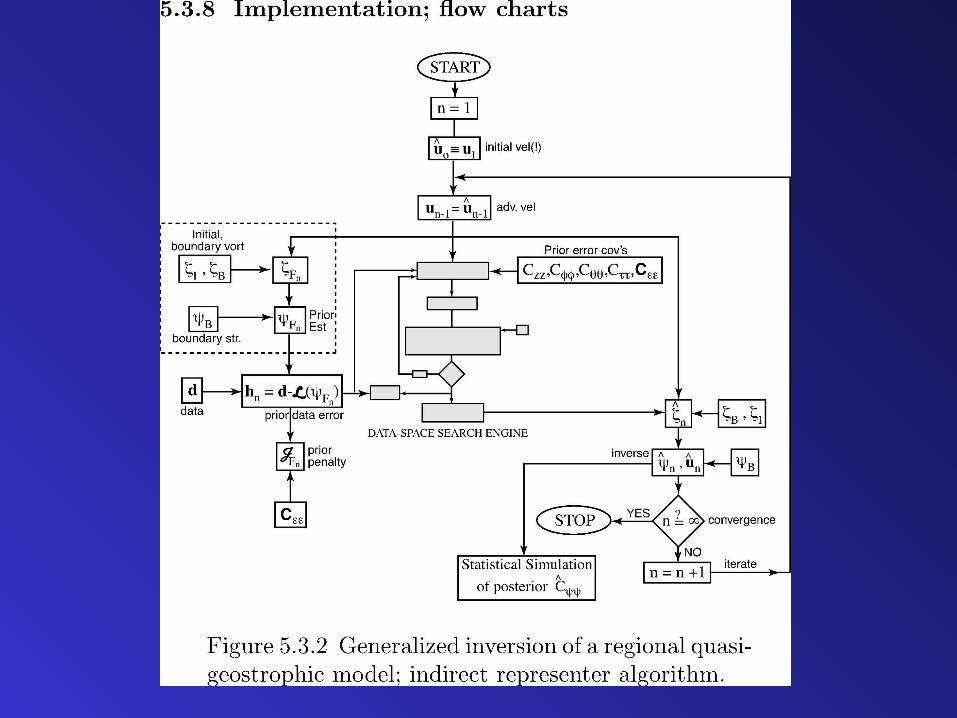
IOM System Pseudo-code
IOM(){ read d
first( ; uF) h = d - uF solve(h ; ) final( ; ) }
d = datauF = meas. first guessh = misfit = representer coefficients
Key:
Physical Space / user supplied
Both / Auto-generated
Data Space/IOM supplied
Subroutine Notation: foo( in ; out )
Pure Data Space…
^
^
^

IOM First Guess Code
first(;uF){ read F tanlin( F(x,t) ; UF(x,t) )
measure(UF(x,t) ; uF) }
F(x,t) = Initial / boundary / interior forcing
UF(x,t) = response to FuF = measured first guess
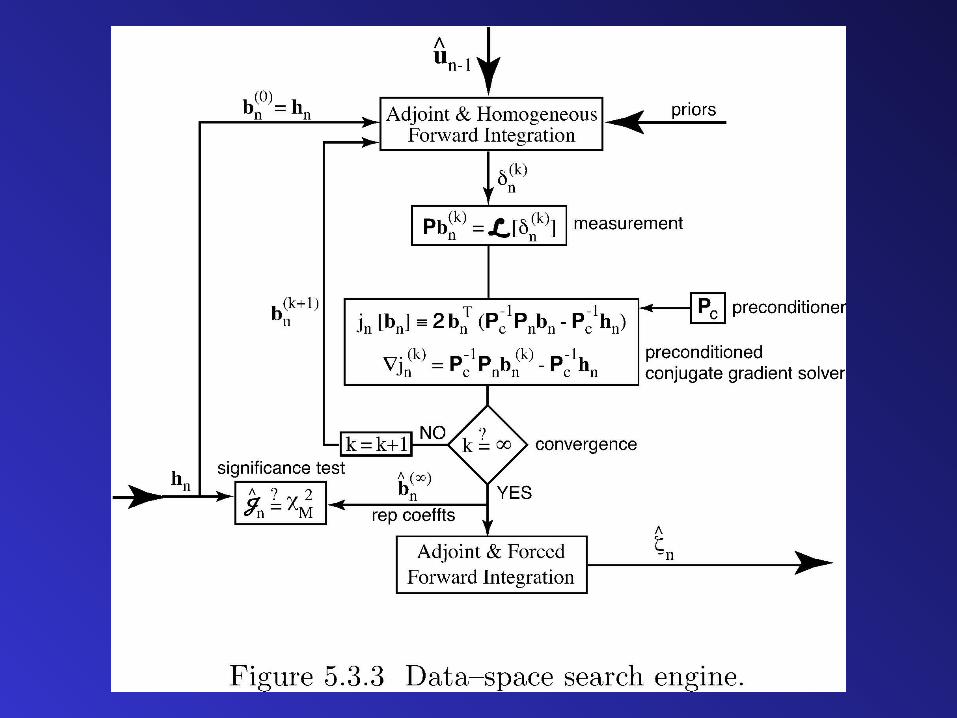
IOM Inner Solver Code
solve(h ; ){ = h
while ( ≠ ){ comb( ; D(x,t) )
adjoint( D(x,t) ; (x,t) ) convolve( (x,t) ; (x,t) )
tanlin( (x,t) ; (x,t) ) measure( (x,t) ; )
stabilize( , ; ) call precongrad( ; ) } = }
(x,t) = adjoint(x,t) = forwardD(x,t) = Dirac comb = representer coefs = measured = scratch = scratch
^
^
^
IOM Final Sweep
final( ; ){ comb( ; D(x,t) ) adjoint( D(x,t) ; (x,t) )
convolve( (x,t) ; (x,t) ) tanlin((x,t) + F(x,t); U(x,t) ) write U(x,t) }
D(x,t) = Dirac combU(x,t) = optimal estimate (x,t) = optimal adjoint
^
^
^
^
^
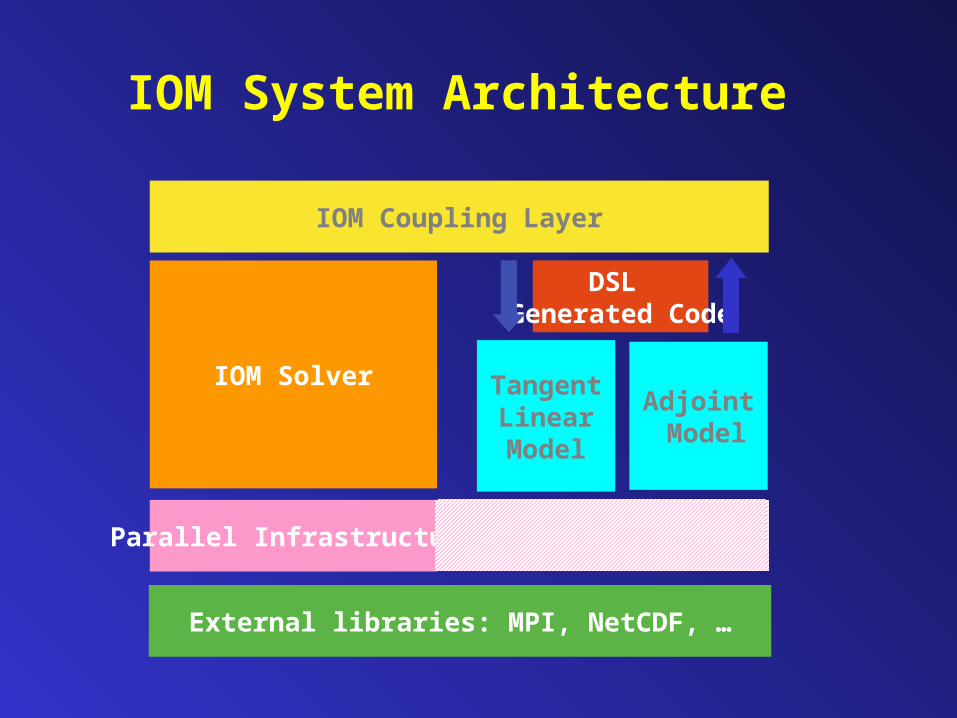
IOM System Architecture
Parallel Infrastructure
IOM Solver
IOM Coupling Layer
TangentLinearModel
DSL Generated Code
External libraries: MPI, NetCDF, …
Adjoint Model

IOM Parallel Module Support
parallel
F90 Module Heirarchy:
process thread virtualtopology
PEZ9pt stencil
IOMbroadcast
stencils
buffers
Solverglobal sums
IOM Coupling Design Details
Key object: the observation – Simplest case: a point observation– is a distribution: (-', -', t-t' ) – In general smeared out over space-
time.The observation (self describing)– F90 derived type– type of observation– units
Associated methods must be supplied for mapping observations onto gridded state variables.
IOM Coupling Design Details
Fortran/Unix specific (applications / code generator)Preferred mode: separate executables.– IOM + coupler + ocean models (constant functions)– IOM-PEZ components currently merged into one executable
IOM supports parallel components (MPI/OMP/hybrid)Fixed number of processors – MPI_SPAWN and MPI_SPAWN_MULTIPLE not supported on many
major platforms (e.g. IBM) ).
Coupled component execution does not overlap.– Strategy adopted to enable easy interfacing with diverse
ocean codes, with different internal forms of parallelism.
Solver checkpoint/restarts IOM system, no internal state saved on TLM/adjoint model side.
Automatic Generation of Model-Specific IOM Tools
Martin Erwin and Zhe FuOregon State University
Idea:
Ocean modelers: • select simulation tools• provide parameters for their models• obtain a customized variational system
• Specify ocean modeling tools once• Identify model-dependent parameters• Generate Fortran programs from specification and values for parameters
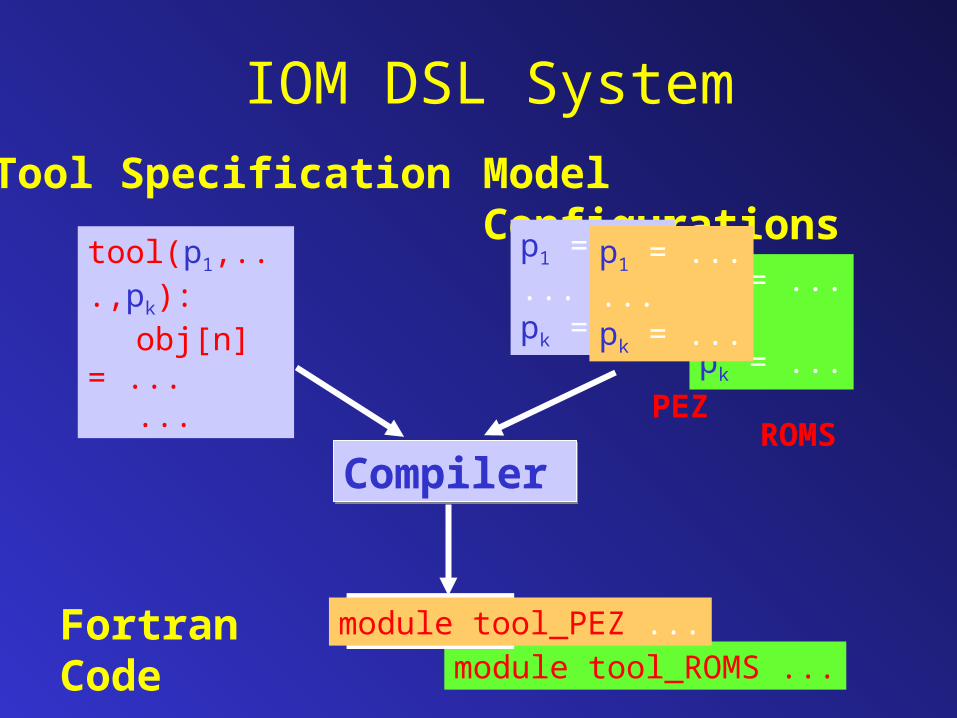
IOM DSL System
tool(p1,...,pk):obj[n] = ......
Tool Specification Model Configurations
p1 = ......pk = ...
Compiler Compiler
Fortran Code
p1 = ......pk = ...
module tool_ROMS ...
PEZROMS
p1 = ......pk = ...
module tool_PEZ ...
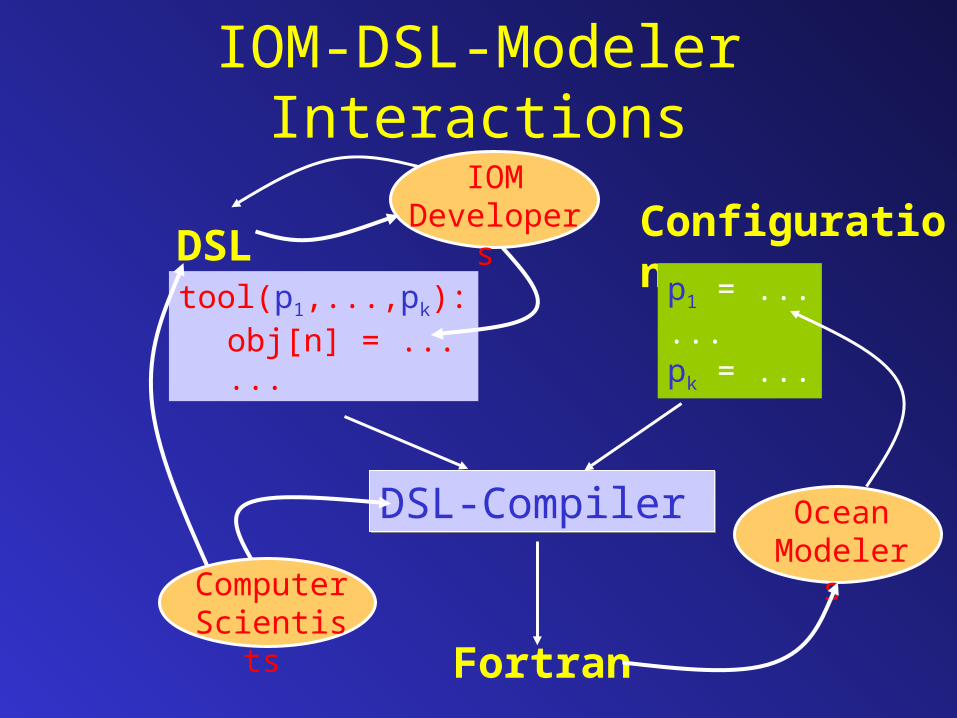
IOM-DSL-Modeler Interactions
tool(p1,...,pk):obj[n] = ......
DSL Configuration
p1 = ......pk = ...
DSL-Compiler DSL-Compiler
Fortran
ComputerScientists
OceanModelers
IOMDevelopers
Questions?