Coupled Rotor Housing Dynamics Component Mode Synthesis · • Natural frequencies compared between...
20
© 2011 ANSYS, Inc. September 8, 2011 1 Coupled Rotor‐Housing Dynamics Using Component Mode Synthesis Presented by Stephen James Engineer, Rotating Machinery Dynamics Group Southwest Research Institute San Antonio, Texas
Transcript of Coupled Rotor Housing Dynamics Component Mode Synthesis · • Natural frequencies compared between...

© 2011 ANSYS, Inc. September 8, 20111
Coupled Rotor‐Housing Dynamics Using Component Mode Synthesis
Presented by Stephen JamesEngineer, Rotating Machinery Dynamics GroupSouthwest Research InstituteSan Antonio, Texas

© 2011 ANSYS, Inc. September 8, 20112
Objective• Use the Component Mode Synthesis (CMS) reduction technique available inANSYS® to aid in the analysis of rotordynamic systems
• Most rotordynamic analysis codes use 2D models to analyze the rotor and casing– Rotors can be analyzed using beam elements– Casing structures can be simplified into beam or shell models
• What happens when the casing cannot be simplified?
• Casing structures require 3D solid elements• Overall model results in large number of elements and associated nodes
Introduction
X
Y
Z
Image Courtesy:Turbo Exchange & Performance TEP Turbocharger (http:// www.tepturbos.com)
© 2011 ANSYS, Inc. September 8, 20113
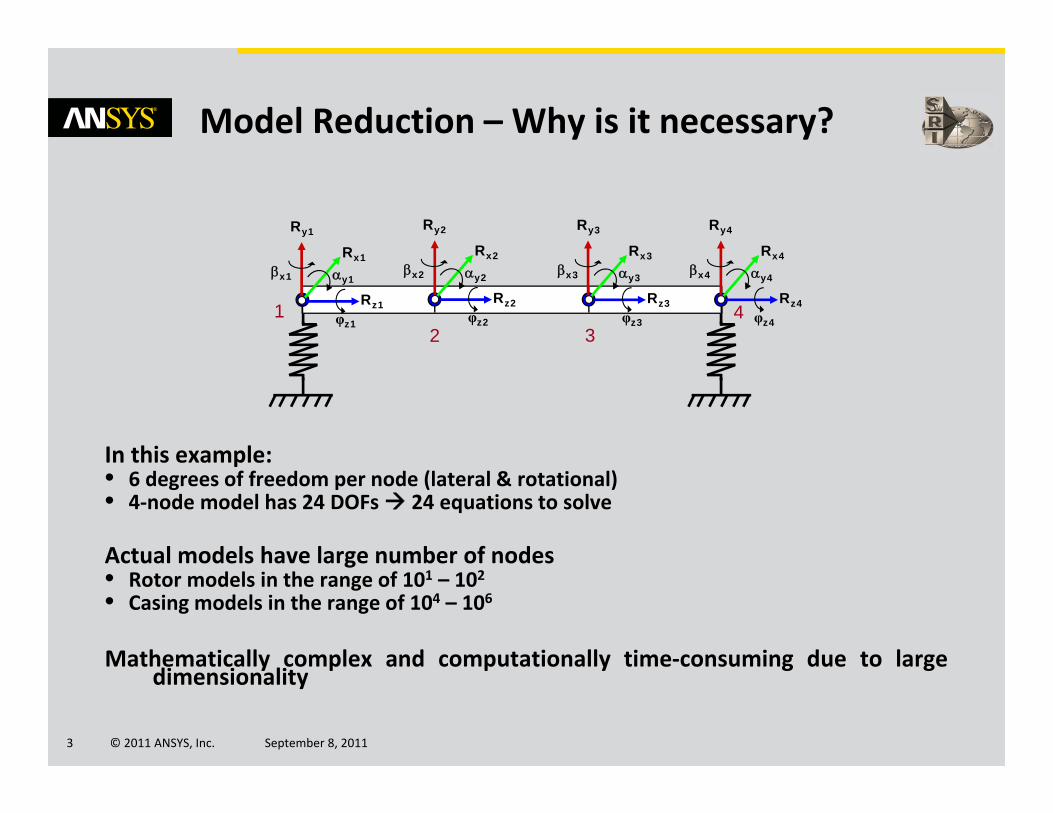
In this example:• 6 degrees of freedom per node (lateral & rotational)• 4‐node model has 24 DOFs 24 equations to solve
Actual models have large number of nodes• Rotor models in the range of 101 – 102• Casing models in the range of 104 – 106
Mathematically complex and computationally time‐consuming due to largedimensionality
Model Reduction – Why is it necessary?
1Rz1
x1
Rx1
Ry1
y1
φz12 3
4Rz2
x2
Rx2
Ry2
y2
φz2
Rz3
x3
Rx3
Ry3
y3
φz3
Rz4
x4
Rx4
Ry4
y4
φz4

© 2011 ANSYS, Inc. September 8, 20114
Guyan Reduction Technique• Rewrite equations of motion with a reduced number of degrees of freedom• Build a detailed model and then use only dynamic portion
• Reduces dimensionality by directly eliminating physical coordinates• Defines a set of interior coordinates in terms of boundary (exterior) coordinates
Reduction Techniques – 1
12 3
4
f1(t) f2(t)
M x C x K x F
ExteriorCoordinates
InteriorCoordinates
“Exterior”“Master”“Retained”
“Interior”“Slave”
“Discarded”

© 2011 ANSYS, Inc. September 8, 20115
Guyan Reduction Technique• Rearranging equations
• Retain master DOFs and eliminate slave DOFs
Reduction Techniques – 1 (continued)
12 3
4
f1(t) f2(t)Exterior
Coordinates
InteriorCoordinates
11 12 13 141 1 1 1
21 22 23 242 2 2
31 32 33 343 3 3
41 42 43 444 4 4 4
0 0 00 0 0 00 0 0 00 0 0
k k k km x x fk k k km x xk k k km x xk k k km x x f
11 12 13 14 1 1
21 22 23 24 2
31 32 33 34 3
41 42 43 44 4 4
00
k k k k x fk k k k xk k k k xk k k k x f
11 14 12 13 1 1
41 44 42 43 4 4
21 24 22 23 2
31 34 32 33 3
00
k k k k x fk k k k x fk k k k xk k k k x
mm ms m m
sm ss s s
k k x Fk k x F
0
mm m ms s m
sm m ss s
k x k x F
k x k x
1
s ss sm mx k k x
mm m
s
Ixx B x
Bx
For details on Guyan Reduction see ANSYS Help§17.6 Substructuring Analysis (17.6.3 Statics)

© 2011 ANSYS, Inc. September 8, 20116
Guyan Reduction Technique• Based on the assumption that the dynamic content of the system can be definedby the retained coordinates
• The reduced stiffness matrix is exact, whereas the reduced mass and dampingmatrices are approximate.
• Need to have a good understanding of the system before selecting thosecoordinates to be retained. Reduced mass matrix (and hence the accuracy of thesolution) depends on the number and location of masters.
Reduction Techniques – 1 (continued)

© 2011 ANSYS, Inc. September 8, 20117
Component Mode Synthesis (CMS)• More accurate than a Guyan reduction• Coordinates are separated into boundary and interior coordinates• Advantage of CMS is that interior coordinates get absorbed into modalcoordinates therefore retaining all dynamic content of the system
• Define static constraint modes– producing a unit displacement of each boundary coordinate in turn, with allother boundary coordinates fixed and all interior coordinates unconstrainedand unloaded
• Define constraint normal modes– set boundary coordinates to zero– solve free vibration problem forthe interior coordinates
Reduction Techniques – 2
12 3
4
1 i bx B x
2 0i i ij ijm k a

© 2011 ANSYS, Inc. September 8, 20118
Component Mode Synthesis (CMS)• Coordinate transformation used to express the interior coordinates as thesuperposition of two types of displacement modes:– Constraint modes: displacement produced by displacing boundary coordinates– Constrained normal modes – displacement relative to the fixed componentboundaries
• Truncating the number of constrained normal modes determines the number ofdegrees of freedom to be retained for the entire system
• CMS allows significant reduction in model size while retaining essential dynamiccharacteristics
Reduction Techniques – 2 (continued)
i b jx b x a q
0 b
j
Ix
xq
B a

© 2011 ANSYS, Inc. September 8, 20119
Casing built with solid element models – SOLID185, SOLID186, SOLID187
Superelement – MATRIX50
Structural supports built with spring‐damper elements – COMBIN14
Rotor built with beam elements – BEAM4 (legacy), BEAM188
Interconnecting bearings and seals – COMBI214
Analysis Components
c1c2 c3
c4
r1 r2 r3 r4 r5 r6 r7
cs1 cs2ks1 ks2kb1 kb2
kb3 kb4

© 2011 ANSYS, Inc. September 8, 201110
Casing Model• Axisymmetric and Non‐Axisymmetric models built
Analysis Methodology

© 2011 ANSYS, Inc. September 8, 201111
Casing Model (continued)• Models imported into ANSYS Classic
Analysis Methodology
© 2011 ANSYS, Inc. September 8, 201112
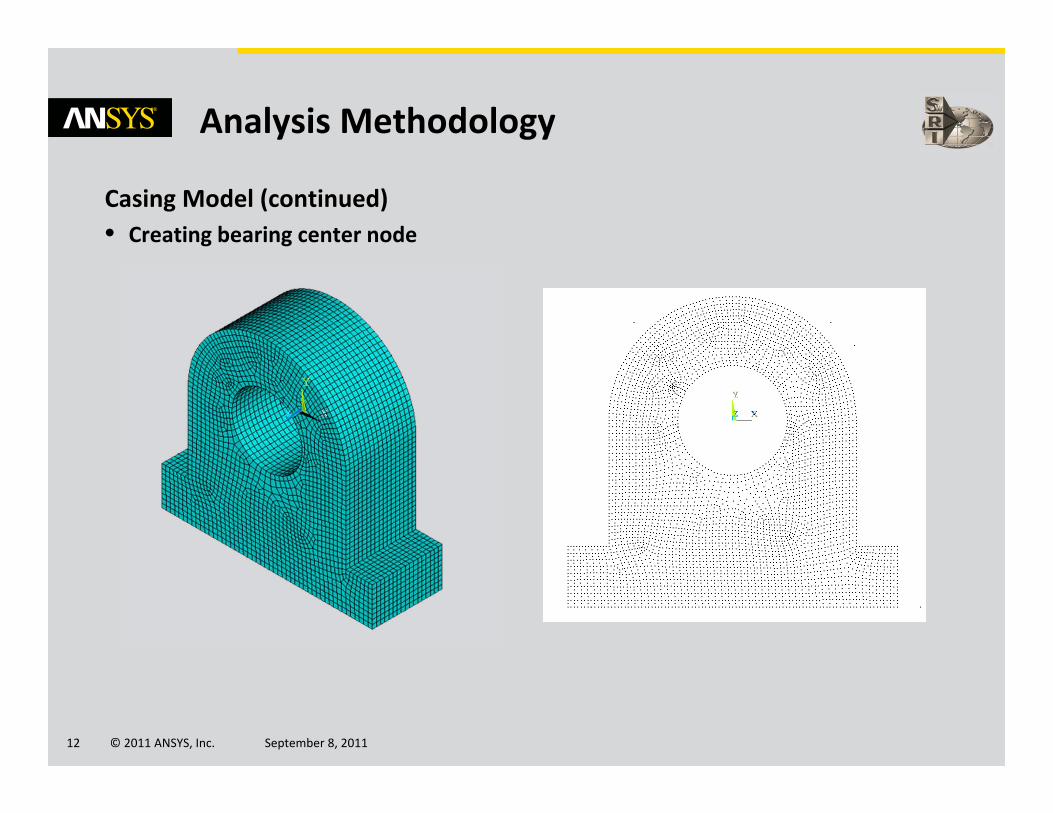
Casing Model (continued)• Creating bearing center node
Analysis Methodology

© 2011 ANSYS, Inc. September 8, 201113
Casing Model (continued)• Creating bearing center node
Analysis Methodology

© 2011 ANSYS, Inc. September 8, 201114
Casing Model (continued)• Creating bearing center node
Analysis Methodology

© 2011 ANSYS, Inc. September 8, 201115
Rotor Model• Rotor model built and validated withXLTRC2 ™ beam‐element based 2Drotordynamic modeling tool. (XLTRC2 ™ is developed by Texas A&M University)
• VB‐script developed to read XLTRC2model and convert it into ANSYS APDL script
Analysis Methodology
Sub GenerateFilesBeam188()Dim fsoAPDLDim objFileAPDL As ObjectstrLineToWrite = strSeperator & vbCrLf & "! BEAM188 APDL DEFINITION FILE" & _"ET, 1188, BEAM188" & vbCrLf & _
"KEYOPT, 1188, 1, 0" & vbCrLf & _"N, " & N1 & ", " & ((ShftStart + x) * XModifier) + XOffset& ", " & ((ShftStart + y) * YModifier) + YOffset & ", " _
objFileAPDL.WriteLine (strLineToWrite)
…
FINISH ! ** HEADER INFORMATION **/CLEAR,START/input,start110,ans,'C:\Program Files\AnsysInc\v130\ANSYS\apdl\',,,,,,,,,,,,,,,,1 /TITLE, COUPLED AXISYMM ROTOR‐CASING MODAL ANALYSIS
! ** RESUME ROTOR MODEL **RESUME,rotor,DB
! Define rotor component CM, ROTOR, ELEM
/FILNAME,symm_rc_modal,1

© 2011 ANSYS, Inc. September 8, 201116
Combined rotor‐casing model with bearings and seals
Analysis Methodology

© 2011 ANSYS, Inc. September 8, 201117
• Natural frequencies compared between coupled rotor‐axisymmetric casing model,coupled rotor‐non‐axisymmetric casing model, and rotor‐only model
Results – Natural Frequency Comparison
Mode Coupled rotor–axisymmetric casing model
Coupled rotor–non‐axisymmetric casing model Rotor‐only model
1 1804.3 1785.7 2430.52 2139.1 2100.8 2508.33 3429.7 3368.1 3774.1
Damped Eigenvalue 3-D Mode Shape Plot
Rotor Model with seal - Mode Shape 1
f=2430.5 cpmd=1.6469 logd
Running Speed =3600 rpm
forwardbackward
Damped Eigenvalue 3-D Mode Shape Plot
Rotor Model with seal - Mode Shape 2
f=2508.3 cpmd=3.2852 logd
Running Speed =3600 rpm
forwardbackward
Damped Eigenvalue 3-D Mode Shape Plot
Rotor Model with seal - Mode Shape 3
f=3774.1 cpmd=1.2889 logd
Running Speed =3600 rpm
forwardbackward

© 2011 ANSYS, Inc. September 8, 201118
• Unbalance response show different trends between the various cases
Results ‐ Unbalance Response Comparison
Rotor relative to Casing Horizontal Unbalance Response at midspan
0.00
0.04
0.08
0.12
0.16
0 2000 4000 6000 8000Rotor Speed, rpm
Res
po
nse
, m
m p
k-p
k
Symmmodel
Non-Symmmodel
3600rpm
Rotor relative to Casing Vertical Unbalance Response at midspan
0.00
0.04
0.08
0.12
0.16
0 2000 4000 6000 8000Rotor Speed, rpm
Res
po
nse
, m
m p
k-p
k
Symmmodel
Non-Symmmodel
3600rpm
Horizontal Unbalance Response at Rotor midspan
0.00
0.04
0.08
0.12
0.16
0 2000 4000 6000 8000Rotor Speed, rpm
Res
po
nse
, m
m p
k-p
k
Symmmodel
Non-SymmmodelXLTRC2rotor-onlymodel3600 rpm
Vertical Unbalance Response at Rotor midspan
0.00
0.04
0.08
0.12
0.16
0 2000 4000 6000 8000Rotor Speed, rpm
Res
po
nse
, m
m p
k-p
k
Symmmodel
Non-SymmmodelXLTRC2rotor-onlymodel3600 rpm

© 2011 ANSYS, Inc. September 8, 201119
Component Mode Synthesis used as a reduction method• Model size is much smaller (290 MB db 4.5 MB db)• Computation time is significantly reduced (by at least 10 times)
APDL script‐generator developed• User need not know how to write APDL script• Can be used to convert a rotor model into equivalent APDL script• Bearing and seal models are also automatically built from tabular inputs• Multiple cases can be analyzed more quickly
Results point to the obvious• A valid model is one that is as close as possible to the actual machine/structure• The impact of the non‐axisymmetric casing is evident• Using axisymmetric models may be sufficient for some cases but not all
What ANSYS® technology does this bring to the table?• Using Component Mode Synthesis to analyze complex coupled rotor‐non‐axisymmetric rotordynamic systems
Summary and Conclusions

© 2011 ANSYS, Inc. September 8, 201120
QUESTIONS?
Stephen JamesEngineer, Rotating Machinery Dynamics GroupSouthwest Research InstituteSan Antonio, Texas