
Contribution à l'étude d'alternateurs automobiles : caractérisation ...

1
Contribution à l’étude et à la réalisation
de systèmes piézoélectriques d’actionnement à base de PZT

2
« Et Haüy explicite la différence entre le
charlatan et le physicien : le premier cache le mécanisme du tour pour se dire possesseur d'un art magique, tandis que le second dévoile et explique ce mécanisme. »
Extrait de « Haüy et l’électricité » par C. Blondel

3
Structure du document Il n’existe pas de format unique pour les habilitations à diriger les recherches. Différentes
formules sont possibles. En ce qui concerne ce manuscrit, j’ai choisi de réaliser un document de synthèse qui présente mes activités de recherche mais surtout les place dans le contexte de notre connaissance de la piézoélectricité. Il s’agit donc d’un document à vocation pédagogique sur la piézoélectricité qui énonce mes travaux de recherche sans entrer dans leur détail. Pour avoir des informations plus précises sur les travaux évoqués dans ce document, les thèses des doctorants que j’ai encadrés et les articles rédigés seront des sources plus pertinentes.
Il convient néanmoins de distinguer ce qui est original et constitue mon apport. Pour cela, j’ai
mis en gras les parties du manuscrit qui présentent cette particularité dans les sections où ce n’est pas forcément évident. Pour les parties qui décrivent des travaux spécifiques cela n’a pas été nécessaire.
Ce document décrit les activités de recherche que j’ai menées depuis dix ans. Il est divisé en trois
parties : • La première partie (pp. Erreur ! Signet non défini. à 5) est exhaustive. Elle est constituée de
mon curriculum vitae résumant mon parcours et mes activités de recherche et d’enseignement. • La deuxième partie (pp. 5 à Erreur ! Signet non défini.) correspond à la synthèse de mes
activités de recherche concernant l’utilisation de la piézoélectricité dans un but d’actionnement, à l’exclusion de tout le reste. La première section en présente le thème général : la piézoélectricité. Elle est suivie de trois sections orientées autour des trois axes de recherche qui ont été suivis :
- Lois de comportement liées aux grandeurs mécaniques ; - Etude de dispositifs élémentaires à base de matériaux piézoélectriques ; - Conception de systèmes utilisant la propriété de piézoélectricité.
Une conclusion puis les perspectives de recherche terminent cette partie. • La troisième partie du document (p. Erreur ! Signet non défini.) est une annexe contenant une
sélection de publications significatives. Il peut s’agir d’articles référencés dans la partie 2 ou d’articles utilisant une démarche analogue à celle employée pour traiter les problématiques liées à l’utilisation de la piézoélectricité.

4
Sommaire
1. TRAVAUX DE RECHERCHE ................................................................................................................................... 5
1.1. THEME DE RECHERCHE ........................................................................................................................................... 6 1.1.1. Contexte ....................................................................................................................................................... 7 1.1.2. Historique .................................................................................................................................................. 13 1.1.3. Orientation de l’activité de recherche........................................................................................................ 16 1.1.4. Références et renvois copyrights ................................................................................................................ 21
1.2. MODELISATION DE LOIS DE COMPORTEMENT FERROELECTRIQUE ......................................................................... 23 1.2.1. Introduction ................................................................................................................................................ 24 1.2.2. Modélisation de la polarisation des ferroélectriques en fonction du champ électrique ............................. 34 1.2.3. Modélisation de la déformation des ferroélectriques en fonction de la polarisation. ................................ 39 1.2.4. Comportement piézoélectrique sous contrainte ......................................................................................... 40 1.2.5. Perspectives ............................................................................................................................................... 42 1.2.6. Références .................................................................................................................................................. 42
1.3. ETUDE DE DISPOSITIFS PIEZOELECTRIQUES ELEMENTAIRES .................................................................................. 45 1.3.1. Introduction ................................................................................................................................................ 50 1.3.2. Multicouches .............................................................................................................................................. 53 1.3.3. Bilames ....................................................................................................................................................... 57 1.3.4. Langevins ................................................................................................................................................... 61 1.3.5. Buzzers ....................................................................................................................................................... 65 1.3.6. Perspectives ............................................................................................................................................... 65 1.3.7. Références .................................................................................................................................................. 66
1.4. CONCEPTION DE SYSTEMES PIEZOELECTRIQUES ................................................................................................... 68 1.4.1. Introduction ................................................................................................................................................ 68 1.4.2. Inchworm ................................................................................................................................................... 75 1.4.3. micropompe ................................................................................................................................................ 79 1.4.4. Mobiles ....................................................................................................................................................... 83 1.4.5. Stick slip ..................................................................................................................................................... 85 1.4.6. Perspectives ............................................................................................................................................... 87 1.4.7. Références .................................................................................................................................................. 87
1.5. CONCLUSION ........................................................................................................................................................ 89 1.6. PERSPECTIVES DE RECHERCHE ............................................................................................................................. 90

5
1. Travaux de recherche
Cette deuxième partie du document n’aborde que les aspects de mon activité de recherche liés à la piézoélectricité. Elle est composée de six sections. La première présente le contexte de mon travail et l’orientation de mon activité de recherche dans ce domaine. Les trois suivantes exposent les travaux effectués selon trois axes de recherche :
- Lois de comportement ferroélectrique ; - Etude de dispositifs piézoélectriques élémentaires ; - Conception de systèmes piézoélectriques.
En cela, ce document suit l’approche qui a été jugée originale et a conduit à la rédaction en 2008 de [Safari 08]. Les deux dernières sections portent respectivement sur une conclusion concernant les travaux effectués et sur les perspectives de recherche. Cette partie du document a pour vocation à énoncer mes travaux de recherche concernant la piézoélectricité, à les situer dans leur contexte et à en dégager des perspectives. Un deuxième objectif recherché est de servir de base de connaissance et de bibliographie à mes futurs doctorants. Les références des publications personnelles citées dans la description des travaux correspondent à la liste des publications du Curriculum Vitae. Elles utilisent donc la nomenclature des pages Erreur ! Signet non défini. à Erreur ! Signet non défini.. Les autres références bibliographiques sont quant à elles regroupées en fin de présentation de chaque axe. Un recueil de publications significatives suit dans la troisième partie du document (p. Erreur ! Signet non défini.).

6
1.1. Thème de recherche Le projet de recherche que j’ai présenté lors de mon recrutement portait sur le développement
de modèles et de lois de commande des micro capteurs et micro actionneurs en vue de la conception de systèmes autonomes. Ce projet avait été initié par la volonté d’établir au LGEP un groupe de travail sur le contrôle des systèmes de petites tailles. Il se trouve qu’à cette époque, peu de micro systèmes étaient suffisamment maîtrisés pour nécessiter de mettre en place une commande permettant leur utilisation optimale. Parallèlement, les membres de ce groupe de travail ont eu l’opportunité d’accéder à d’autres fonctions.
Le contexte m’a donc amené à réorienter progressivement mon projet de recherche. Je me
suis alors intéressé à l’étude, la conception et la réalisation de dispositifs piézoélectriques (qui intègrent, par nature, les fonctions d’actionneur et de capteur).
Aujourd’hui, dans mes activités de recherche, seules les fonctions d’actionneur ont été mises
en œuvre. L’aspect capteur, permettant de laisser entrevoir un système complet et intelligent, fait partie de mes perspectives.
Les dispositifs que j’ai réalisés jusqu’à aujourd’hui, le sont dans des dimensions
centimétriques pour des raisons de facilité. Cependant, ils sont conçus avec le souci de pouvoir, par la suite, être miniaturisés. Pour cela, les éléments piézoélectriques ont des formes simples, les liaisons mécaniques sont élémentaires [Lobontiu 05].
Il n’en reste pas moins que la miniaturisation de ces dispositifs est un défi qui nécessite du travail et des compétences qui nécessiteront des collaborations. Cela fait aussi partie des perspectives à long terme.
1) Qu’est ce que la piézoélectricité ? La piézoélectricité est la propriété qu’ont certains matériaux cristallins à convertir une énergie
mécanique en énergie électrique, c’est l’effet direct. Réciproquement, ces matériaux peuvent aussi générer le processus inverse (nommé effet inverse). Plus précisément, soumis à une contrainte mécanique σ, le matériau peut être le siège d’une induction électrique D, inversement soumis à un champ électrique E, le matériau peut alors se déformer (déformation S). Ces différentes grandeurs sont liées par des coefficients de couplage électromécaniques.
jkijki dD σ=
kkijij EdS = Nous serons amenés à donner plus de détails sur cette conversion par la suite. Mais on peut
dés maintenant se représenter pourquoi j’avançais que les systèmes piézoélectriques intègrent par nature la fonction de capteur.
2) Contenu de la partie : Thème de recherche Je chercherai dans un premier temps à montrer que la piézoélectricité est déjà très utilisée
dans notre quotidien, cela sera une manière d’évoquer le contexte de ces travaux. Je montrerai, par la suite que les recherches sur le sujet sont universelles et actives (doit on parler de concurrence ?) et on cherchera des raisons à cela. Pour essayer d’en comprendre les raisons, je ferai un historique de la piézoélectricité. Enfin, j’énoncerai la stratégie que j’ai choisie pour tenter d’apporter ma pierre

7
à l’édifice d’une utilisation optimale de la propriété de piézoélectricité, c'est-à-dire dans les cas où cela se justifie le plus.
1.1.1. Contexte
Les utilisations de la piézoélectricité sont présentes dans notre quotidien depuis longtemps, à
différents niveaux et avec des applications diverses. 1) Où est ce présent ?
Qu’y a-t-il de commun entre les objets des différentes figures1 ci-dessous ?
Figure 1. Casque. Figure 2. Imprimante jet d’encre.
Figure 3. Outil de chirurgie dentaire Figure 4. Appareil traitement cancer prostate.
Figure 5. Pince antitique Figure 6. Montre Seiko.
1 Afin de ne pas surcharger les légendes, les sites dont sont issues les images sont listés à la fin de l’introduction.
8
Figure 7. Objectif photo Figure 8. Voiture Clio3.
Figure 9. Allume gaz Figure 10. Appareil de diagnostic échographique.
Figure 11. Disque dur Figure 12. Chaussures à compteur.
Figure 13. Capteur d’empreintes digitales Figure 14. Interrupteur.

9
Figure 15. Lecteur de brail2 Figure 16. Alcootest.
Figure 17. Blackberry Figure 18. Sonde martienne de la Nasa.
Ces dispositifs ont tous en commun qu’ils font appel à la piézoélectricité. Bien entendu, la liste n’est pas exhaustive. Je complète par d’autres exemples classés suivant
la propriété qu’ils utilisent. Pour les dispositifs utilisant l’effet direct, il n’a pas été fait mention des microphones, des
briquets, des hydrophones, des boutons poussoirs, des systèmes de récupération d’énergie, des systèmes d’amortissement (dans les raquettes et les skis chez HEAD et K2 par exemple), des différents capteurs (de choc, accéléromètres, pression, contraintes, gyroscopes),…
Pour les dispositifs utilisant l’effet inverse, il faut évoquer les vibreurs, les agrafeuses, les
systèmes de nettoyage par ultrasons, les machines à coudre industrielles, les hauts parleurs, les buzzers, les sonars, les nébuliseurs, les moteurs ultrasonores, les relais, les dispositifs de micro positionnement et d’ajustement laser, les pompes et bistouris piézoélectriques, les atomiseurs, les nébulisateurs, …
Enfin, pour les dispositifs faisant appel aux deux effets, je listerai les sondes échographiques,
les sonars, les dispositifs de contrôle non destructif par ultrasons, les systèmes de mesure de distances ou débits, les filtres fréquentiels (ondes volumiques SAW), les lignes à retard, les transformateurs piézoélectriques, les absorbeurs de vibrations,…
Je voulais aussi mentionner qu’il existe des applications particulièrement originales que
certains bricoleurs proposent. Un allume gaz piézoélectrique démonté et muni d’une pointe permet d’ioniser des surfaces et ainsi de réaliser un dépoussiéreur efficace3.
2 Le lecteur de brail de cette figure a remporté le concours Lépine en 2010. 3 http://forum.nikonpassion.com/index.php?topic=21099.0

10
Ainsi comme on le voit, la piézoélectricité est exploitée dans notre quotidien, parfois dans des dispositifs fabriqués en grande série. On remarque aussi que les applications ne sont pas toutes apparues à la même époque (il existait par exemple des lecteurs de disques vinyles équipés d’une tête piézoélectrique).
Nous allons maintenant jeter un regard sur les ressources humaines (et particulièrement
académiques) qui contribuent à ces avancées aujourd’hui. 2) Qui est aujourd’hui acteur dans le développement et des dispositifs piézoélectriques ? Les pays réellement impliqués dans le développement de la solution piézoélectrique sont les
états unis et le japon. L’union soviétique a aussi largement contribué à l’émergence de cette technologie. Cependant, des acteurs du développement se trouvent répartis sur le globe. Si on se réfère uniquement aux auteurs de chapitres des livres cités dans ce manuscrit, on obtient la répartition suivante.
Figure 19. Situation des auteurs de chapitres référencés dans ce manuscrit.
En Europe, l’Allemagne se positionne très bien sur ce domaine. La France n’est pas en reste,
on y dénombre sans difficulté une vingtaine de laboratoires investis dans ce type de recherche.
Figure 20. Situation des centres de recherche sur la piézoélectricité en France.
Il est à noter que ces différents laboratoires s’appuient sur des domaines d’expertise variés.
Même si j’ai volontairement exclu la plupart des laboratoires faisant de la synthèse de matériaux (laboratoire de chimie) pour favoriser ceux qui exploitent la propriété de piézoélectricité, on observe que les équipes de recherche peuvent exploiter des connaissances en génie électrique, en thermodynamique ou en mécanique.
Les intervenants que j’ai listés jusqu’à maintenant sont académiques. Les industriels se
situent sur plusieurs créneaux.

11
Certains utilisent une technologie piézoélectrique, ils sont nombreux et plutôt que de les lister, on reviendra dans la section 1.1.3 sur leurs domaines d’application.
Certains fournissent du matériau ou des systèmes « sur étagère », on pense dans cette
catégorie à des entreprises comme PI (D), Noliac (DK), Ferroperm (DK), piezo systems (USA), Saint gobain quartz (FR), Morgan matroc (UK), Hoechst Ceramtec (D), Philips Composants (NL), Trielda (D), NTK Technical ceramics (J), Tokin (J), Murata (J), Sensor technology limited BM Hi-tech Division (Canada), American Piezo ceramics Inc. (USA), Amroh (D)…
Enfin, la dernière catégorie propose d’offrir une solution piézoélectrique à la demande
particulière d’un client, c’est le cas de Telemac, Cedrat, Nanomotion, new scale technologies, piezo motor, PI, Faulhaber, attocube systems, pcbmotor, elliptec, …
Bien sûr, les objectifs de chacun de ces acteurs sont différents. Pourtant, parfois, on constate
l’existence de réseaux amenant les uns et les autres à travailler ensemble, c’est le cas notamment du piezo institute, de l’institut de recherche Femto-ST, du programme de coopération extérieure Petra, de projets européens comme « Multifunctional & Integrated piezoelectric Devices », « Composite Composites and Adaptive Structure: Simulation, Experimentation and Modelling », « aeronews »…
Afin d’affiner le contexte, il est intéressant de regarder l’évolution des communications
autour de la piézoélectricité au cours du temps. 3) Quelle est l’évolution ? Si on utilise comme source de données la base de « isi web of knowledge », on observe
l’évolution présentée en Figure 21 du nombre de publications ayant pour mot clé : piezoelectric.
0
500
1000
1500
2000
2500
3000
3500
4000
1961 1966 1971 1976 1981 1986 1991 1996 2001 2006
année
nom
bre
d'ar
ticle
s
Figure 21. Evolution du nombre annuel d’articles de revues sur la piézoélectricité depuis
1961.

12
Sur ce graphique, on constate que l’augmentation du nombre d’articles par an qui traite de la piézoélectricité est incontestable. On peut cependant s’interroger sur son interprétation. N’est il pas un simple reflet de la tendance consistant à évaluer quantitativement la qualité d’une recherche sur le nombre d’articles qu’elle suscite ?
En s’écartant de la base de données de « isi web of knowledge », je précise que les revues dans lesquelles sont, le plus fréquemment, publiés les articles sur la piézoélectricité sont :
Journal of sound and vibration, Journal of intelligent and robotic systems, Journal of applied physics, Journal of mechanical Science and technology, Journal of mecatronic, Journal of electroceramics, Journal of American ceramic society, Physical review, Applied physic letter, IEEE transaction on ultrasonics, Ferroelectrics, and frequency control, Integrated ferroelectrics, Smart material and structures, Sensors and actuators, Smart material systems, Ferroelectrics, Ceramics international, EDN Europe, Power in motion, …
Les conférences qui reviennent le plus souvent dans les citations de ces articles sont : Actuator, International Conference on adaptive structures, Mecatronics, CESA, International
symposium on applications of ferroelectrics ISAF, piezo, Ultrasonic international, … Afin de s’affranchir de l’évolution des critères d’évaluation de la recherche, on s’est intéressé
à la tendance du nombre de brevets annuels apparaissant dans la base « espacenet » et faisant appel à la piézoélectricité. Cette évolution est montrée sur la Figure 22.
0
500
1000
1500
2000
2500
1961 1966 1971 1976 1981 1986 1991 1996 2001 2006
année
nom
bre
de b
reve
ts
Figure 22. Evolution du nombre annuel de brevets sur la piézoélectricité depuis 1961.
On constate la même tendance qu’en termes de publications. Il semblerait donc qu’il y ait des
conclusions à en tirer notamment au niveau des perspectives, va-t-on vers un essoufflement ? Inversement, on peut chercher à comprendre cette évolution à partir de l’histoire de la piézoélectricité. C’est ce qui justifie la section suivante.

13
1.1.2. Historique
Cette section va permettre de positionner l’actualité de la piézoélectricité dans l’histoire de
cette « discipline ». Une découverte récente n’induit pas les mêmes répercussions qu’une découverte ancienne.
La propriété existe à l’état naturel dans certaines matières, c’est le cas du quartz qui est le
plus connu, mais aussi de la blende, de la tourmaline, de la topaze, du chlorate de soude, de la calamine, de l’acide tartrique droit, du sucre de cane, …
Figure 23. Jolis cristaux de quartz.
En inde, on avait remarqué depuis longtemps que la tourmaline (qui est un groupe de minéraux de la famille des silicates) avait des propriétés étranges. En effet, plongée dans des cendres chaudes, sur une face elle attirait les cendres, sur l’autre elle les repoussait (effet pyroélectrique). Après un certain temps, ces effets s’inversaient.
Cette propriété est aussi présente dans des matériaux de synthèse qui ont été utilisés avant
même sa découverte. Au milieu du 17eme siècle, à La Rochelle, le premier matériau ferroélectrique a été synthétisé (tartrate double de sodium et potassium hydraté) par un pharmacien (P. Seignette) qui lui attribuait des vertus curatives. Depuis, ce matériau s’appelle le sel de Seignette ou sel de Rochelle.
La tourmaline fut importée en Europe au début du 18eme siècle où C. V. Linne, en 1747, la
dénomma « crystal lapis electricus ». Des chercheurs (A. H. Becquerel, Lord Kevin) émirent l’hypothèse que la variation électrique de la tourmaline était induite par la variation de ses dimensions due à la dilatation thermique.
Figure 24. Jolis chercheurs (A.H. Becquerel, L. Kevin).
En 1817, l’abbé Haüy mène des expériences et observe qualitativement « l’électricité de
pression ». Ces expériences seront décriées par la suite et on fera la distinction entre ce qu’à observé Haüy et la piézoélectricité [Blondel 97]. Le spath d’Islande étudié par Haüy n’est pas piézoélectrique.

14
1) De la découverte à la première utilisation Pourtant, il faut attendre 1880 pour que la propriété de piézoélectricité soit officiellement
« découverte » par les frères P. et J. Curie. Ils s’aperçurent que l’effet direct créait l’apparition de charges de surface sur un cristal de tourmaline dans une quantité proportionnelle à la déformation mécanique appliquée au cristal. « Quelle que soit la cause déterminante, toutes les fois qu’un cristal hémièdre à faces inclinées, non conducteur, se contracte, il y a formation de pôles électriques dans un certain sens ; toutes les fois que ce cristal se dilate, le dégagement d’électricité a lieu en sens contraire. » [Curie 81a].
Figure 25.Famille Curie.
En 1881, l’effet inverse est prédit théoriquement par LIPPMANN sur la base du principe de
conservation de l’électricité. Pour en démontrer les intérêts, il l’applique à « un phénomène récemment découvert par MM. P. et J. Cuire ». Il énonce alors « donc si l’on électrise une tourmaline en chargeant positivement sa base Ʌ, le cristal s’allonge. » [Lippmann 81].
La même année, P. et J. Curie effectuent une vérification expérimentale de l’effet inverse.
« Nos expériences actuelles viennent prouver que, réciproquement, lorsqu’on charge d’électricités contraires les deux extrémités de l’axe d’un cristal hémièdre, il éprouve, suivant cet axe, soit une contraction, soit une dilatation, selon le sens dans lequel la tension électrique lui est appliquée » [Curie 81b]. Pour cela, ils avaient inventé le précurseur des transformateurs piézoélectriques en se servant de l’effet direct pour mettre en évidence l’effet inverse.
Il est amusant d’apprendre que malgré ces premiers pas en France, c’est W.G. Hankel, en
1881, qui proposa la dénomination « piézoélectricité » dont « piezo » vient de la langue grecque et signifie « presser ».
C’est dans les dix années qui suivent que des chercheurs comme F. Pockels, P. Duhem
effectuent les premières mesures quantitatives. Cela permet d’établir une identification et une classification des cristaux piézoélectriques.
En 1898, P. Curie arrête ses recherches sur la piézoélectricité pour travailler avec sa femme Marie.
C’est ensuite vers 1910 que l’on voit les premiers développements mathématiques utilisant la théorie de l’élasticité des matériaux. W. Voigt définit alors les constantes piézoélectriques qui sont depuis utilisées dans les récents standards IEEE.
2) De Paul LANGEVIN à la deuxième guerre mondiale Certains auteurs attribuent au naufrage du RMS Titanic la suite de cet historique. En effet, vers 1915, on doit la première utilisation qui est faite de la propriété de
piézoélectricité à P. Langevin (élève et ami de P. Curie, il lui succède à l’école de physique et de chimie). Il s’agit d’un générateur d’ondes ultrasonores pour la mesure et la détection sous marine. C’est le précurseur du sonar et de toutes les techniques échographiques.

15
En 1918, une autre application répandue est apparue grâce à W. G. Cady. Il s’agit du premier oscillateur électronique stabilisé qui permettra « la montre à quartz ». W.G. Cady a laissé son nom à un prix qui récompense les meilleures recherches sur la piézoélectricité.
En 1921, J. Valasek publie la première mesure de cycles d’hystérésis reliant la polarisation au
champ électrique, les mesures ont été effectuées sur du sel de Seignette, le phénomène mesuré qui s’appelait alors la Seignette-électricité prend le nom de ferroélectricité.
L’année 1922 voit la création, en France de la société Saint Gobain Quartz S.A.S. qui laisse
pressentir un marché en plein essor. En effet, c’est entre 1920 et 1940 qu’apparaissent la plupart des applications commerciales que l’on connaît aujourd’hui de la piézoélectricité. Cependant, à l’époque l’essor est limité par les faibles performances en termes de conversion électro mécaniques des matériaux.
C’est au cours de la Seconde Guerre mondiale que nait réellement l'industrie de la piézo-
électricité. Cinquante millions de résonateurs sont fabriqués aux États-Unis. Deux livres paraissent alors, traitant de la piézoélectricité dans son ensemble. Le premier est de W. G. Cady, le second d’E. Palmans [Palmans 47].
Parallèlement, les premières céramiques font leur apparition. Il s’agit dans un premier temps
du Titanate de Baryum qui présente un bien meilleur coefficient de couplage que les matériaux utilisés avant. Le brevet correspondant est déposé en 1946 [Brevet 46a]. Un autre brevet protège de nombreuses céramiques [Brevet 46b]. Le Titanate de Baryum est utilisé commercialement pour la première fois dans les phonographes. Ce matériau est ferroélectrique, dés lors utilisation de la piézoélectricité et ferroélectricité resteront associées.
3) Des PZT aux multicouches Apparaissent alors un grand nombre de développements théoriques autour de la
ferroélectricité, ce sont les travaux de L. Landau, A.F. Devonshire [Lines 77]. Autour des années 1950, ce sont les PZT qui sont synthétisés, on atteint ce qui se fait de
mieux (encore aujourd’hui) en matière de céramiques pour la conversion d’énergie. Suite à cette découverte, de nouveau, une compagnie importante et toujours en activité va
voir le jour, il s’agit de Ferroperm en 1952. Les excellentes propriétés piézoélectriques des PZT sont mises en évidence en 1954 par Jaffe,
Roth, Mazullo [Jaffe 54]. Les années 70 voient deux approches différentes se mesurer. Aux Etats unis, les recherches
sont secrètes et protégées par des dépôts de brevets. Au japon, les recherches sont moins confidentielles alliant les forces industrielles et académiques [Niezrecki 01].
C’est à la fin des années 80, qu’apparaissent sur le marché les actionneurs multicouches
permettant d’utiliser l’effet inverse sans recourir à des tensions élevées. 4) De nos jours Il n’y a pas de date exacte et de nombreux travaux sur les modes de synthèse, la composition,
le dopage des PZT sont encore en cours mais l’on peut considérer que la maturité des PZT est atteinte.

16
Ainsi, les années 80 ont vu apparaître les moteurs à onde progressive qui sont ce que l’on peut considérer comme le sommet (en termes d’utilisation ciblée de la piézoélectricité pour l’actionnement) des applications des PZT [Ueha 93].
En 1987, ces moteurs dits ultrasoniques ont équipé les objectifs d’appareils photographiques
utilisant ainsi, de manière pertinente, leur structure annulaire, leur fonctionnement silencieux, leur faible consommation électrique et leur précision de positionnement.
C’est en 1993 qu’on a réussi à allier le PZT et les technologies Silicium, cela a conduit à
l’émergence des mémoires ferroélectriques. Enfin, à mon sens, 2006, année de l’entrée de la piézoélectricité dans le domaine de
l’automobile, a constitué un tournant majeur. C’est l’année de production de l’injecteur piézoélectrique de Siemens.
1.1.3. Orientation de l’activité de recherche
On a vu que les applications de la piézoélectricité étaient nombreuses, que l’activité de
recherche et développement autour de ce « cadeau de la nature » était intense et que l’histoire de ces activités est relativement récente. Il semble intéressant à ce niveau d’énoncer les raisons pour lesquelles il y a un intérêt particulier à développer des dispositifs piézoélectriques dans un objectif d’actionnement.
Garder cet intérêt à l’esprit permettra de ne pas s’égarer en proposant ce type de solutions, là où des solutions plus conventionnelles auraient parfaitement convenu. En effet, on verra par la suite qu’adopter une solution piézoélectrique à un coût, dans le sens le plus large du terme.
1) Quel est l’intérêt des dispositifs piézoélectriques ? Les caractéristiques communes aux dispositifs piézoélectriques sont listées dans ce
paragraphe. Tout d’abord, les temps de réponse sont faibles. Les matériaux pourront donc être exploités à
des fréquences élevées. C’est la propriété qui est par exemple exploitée dans le cas de l’injection de combustible dans l’automobile. Il en résulte aussi qu’une large gamme de vitesses pourra être exploitée.
Les niveaux de contrainte que peuvent supporter les matériaux sont élevés. Cela permet
notamment de générer des forces ou des couples élevés dans les systèmes complets intégrant des matériaux piézoélectriques.
La conversion électromécanique est intrinsèque et il est simple de générer le champ électrique
nécessaire à la conversion, cela conduit à des dispositifs compacts et légers, de structures simples. L’affirmation précédente associée aux vitesses et niveaux de contraintes exploitables laisse
entrevoir des dispositifs à puissance massique élevée. L’exploitation qui est faite de ces matériaux, par exemple dans les moteurs à onde progressive
conduit à des actionneurs à faibles vitesses de rotation. Cette propriété permet de s’affranchir de l’utilisation de réducteurs pour des applications à fort couple et basse vitesse.

17
Les faibles déplacements engendrés (sous des niveaux de tension élevés) conduisent à une bonne contrôlabilité des actionneurs et à une résolution élevée.
La transformation électromécanique se fait silencieusement et en générant un champ
magnétique négligeable (devant les solutions conventionnelles). C’est cette propriété qui est exploitée, par exemple, dans [Ghio 04].
Un fonctionnement à des températures cryogéniques est possible même si les performances
des actionneurs sont moindres aux basses températures. Figure 26. Comportement en température d’actionneurs piézoélectriques (trois échantillons
testés) (extrait de notes de cours NOLIAC). Enfin, une utilisation sous vide ou en salle blanche est permise de par la composition des
matériaux utilisés. 2) Quels sont les domaines d’application ? Les domaines d’applications sont variés comme on l’a montré précédemment, ils découlent
naturellement des intérêts mentionnés précédemment. Il reste à préciser certains domaines cibles. Le domaine médical est concerné en raison de l’absence de champ magnétique produit. Le
faible temps de réponse est aussi utilisé dans la génération d’ultrasons pour la chirurgie et l’échographie.
Dans le domaine du transport et dans la conversion d’énergie embarquée en général, c’est la puissance massique qui suscite l’intérêt majeur, même si le faible temps de réponse est aussi utilisé. Ici on peut faire référence aux applications dans l’aéronautique [Rouchon 05].
Dans le domaine de l’ingénierie de précision, c’est, bien entendu, la précision qui est
exploitée dans le positionnement d’outils, de miroirs ou de masques, ou les amortissements de vibrations.
Ce paragraphe ne fait apparaître que des grands domaines d’application, la liste complète
aurait été trop longue puisqu’on utilise des systèmes piézoélectriques à peu près partout. Par
Displacement vs Temperature(All Data is for an Input Voltage of 500 V)
0.00
0.50
1.00
1.50
2.00
2.50
3.00
3.50
4.00
4.50
5.00
0 50 100 150 200 250 300 350
Temperature (K)
Disp
lace
men
t (um
)
PZT-5H #4 - ShimPZT-5H #5 - ShimPZT-5H #6 - Shim
Stack AStack BStack C

18
exemple, dans le domaine du textile, on utilise des bilames piézoélectriques pour les machines à coudre industrielles, et des vannes piézoélectriques pour le contrôle des teintures. Il faut cependant noter que pour nombre de ces applications, des solutions existaient avant l’apparition des technologies piézoélectriques. On peut donc regarder pourquoi, ces solutions ont été supplantées par les dispositifs piézoélectriques.
3) Comment se positionnent les solutions piézoélectriques dans l’ensemble des solutions possibles ? Dans l’énoncé des intérêts qui précède, on était resté sur un plan théorique. Si on regarde maintenant un certain nombre de réalisations, c'est-à-dire des dispositifs d’actionnement qui sont développés industriellement, on peut comparer les solutions d’actionnement piézoélectrique aux autres techniques d’actionnement.
C’est ce qui est fait dans le graphe de la Figure 27.
Figure 27. Comparaison des actionnements électroactifs face aux autres techniques
[Rouchon 05].
En outre, on observe (Figure 28) que le rendement de telles structures est supérieur à celui
des actionneurs électromagnétiques pour des puissances inférieures à la dizaine de watts.
Figure 28. Comparaison des rendements des dispositifs piézoélectriques face aux dispositifs
électromagnétiques [Uchino 04].

19
On en conclut qu’il existe effectivement une niche pour ces dispositifs dans laquelle ils présentent suffisamment d’intérêts pour que l’on soit prêt à supporter leurs inconvénients.
4) Quels sont les inconvénients des solutions piézoélectriques ?
C’est dans le cas où l’application le justifie réellement que la solution piézoélectrique doit être adoptée. En effet, il y a un prix à payer aux avantages qu’elle offre.
Comme toute technologie dont la maturité n’est pas très avancée, le coût de mise en œuvre est
élevé (développement, coût des matériaux, nouvelles technologies de production). En outre, le nombre de fournisseurs de matériaux piézoélectriques est encore faible et le fabricant du dispositif doit accepter de dépendre d’un fournisseur.
Le peu de recul dont on dispose sur la plupart des matériaux amène à considérer que les
durées de vie des dispositifs sont relativement faibles (de l’ordre du millier d’heures d’utilisation) particulièrement lorsque le mouvement créé par le piézoélectrique a été transmis à la structure par le biais d’une friction. Ce dernier point a en outre des répercussions sur le rendement de la conversion globale qui est souvent plus faible que celui d’une solution conventionnelle (quand celle-ci est réalisable).
L’alimentation électrique des dispositifs piézoélectriques pose aussi parfois quelques
difficultés. Souvent des niveaux de tension relativement élevés sont nécessaires et pour exploiter l’intérêt du temps de réponse court, il faut solliciter les systèmes à des fréquences élevées.
Le dernier point qu’il est important de mentionner est la présence de plomb dans les céramiques piézoélectriques les plus couramment utilisées (PZT). Même si les normes actuelles tolèrent encore l’utilisation de céramiques contenant du plomb, il y a fort à parier que cette dérogation ne sera pas éternelle.
5) Que faut-il faire pour les utiliser intelligemment ?
A mon sens, utiliser intelligemment la solution piézoélectrique nécessite de prendre un certain nombre de précautions.
En premier lieu, le matériau est au centre du fonctionnement des dispositifs, il faut donc avoir
conscience de ses limites et envisager des stratégies permettant de ne pas l’exploiter de manière abusive.
Dans un deuxième temps, la technologie n’est pas assez mature (synthèse des matériaux,
durée de fonctionnement, modes d’alimentation requis) pour que les dispositifs piézoélectriques concurrencent systématiquement avantageusement les solutions électromagnétiques. Il faut donc s’assurer que l’emploi de la piézoélectricité est bien justifié par l’application.
Pour ces deux points, ce sont les chimistes qui pourront faire évoluer la situation. Enfin, et en complétant le dernier point, afin d’exploiter au mieux la bonne puissance
massique des dispositifs piézoélectriques, ceux-ci doivent être conçus et dimensionnés au plus près de l’application.

20
6) Pourquoi le LGEP avait les armes pour se lancer dans la course ?
L’expertise du laboratoire en modélisation de lois de comportement des matériaux permettait de se positionner vis-à-vis du premier point évoqué précédemment.
L’expérience reconnue en modélisation des structures, surtout par la méthode des éléments
finis, permet d’évaluer les contraintes électriques et mécaniques qu’aura à supporter le matériau, et, grâce aux lois de comportement, la manière dont il va réagir.
En ce qui concerne l’alimentation et le contrôle des structures piézoélectriques, l’expertise en
commande acquise sur les systèmes conventionnels est relativement transposable à ces nouveaux systèmes, par exemple, en matière de prise en compte de l’hystérésis.
7) Quelle est notre approche ? L’approche suivie dans ce manuscrit est l’approche qui a été utilisée dans mon activité de
recherche. Elle reprend les points énoncés précédemment et aborde la piézoélectricité sous trois angles complémentaires.
La modélisation des lois de comportement ferroélectrique consiste à prédire le comportement
du matériau. L’étude de dispositifs piézoélectriques élémentaires permet de formaliser ce que l’on peut
attendre comme source d’énergie mécanique d’un matériau piézoélectrique mis en forme, prêt à être utilisé.
La conception de systèmes piézoélectriques montre des réalisations complètes. Certaines
répondent à un cahier des charges, d’autres doivent être regardées comme des démonstrateurs permettant d’acquérir de l’expérience et ont constitué un premier pas dans une technique d’entrainement particulière utilisant la propriété de piézoélectricité.
J’espère que la complémentarité entre ces trois axes paraîtra une évidence à la lecture de ce
manuscrit.

21
1.1.4. Références et renvois copyrights
[Safari 08] A. SAFARI, E. KORAY AKDOGAN, Piezoelectric and acoustic materials
for transducer applications, Springer, 2008. [Lobontiu 05] N. LOBONTIU, E. GARCIA, Mechanics of micromechanical systems,
Springer, 2005. [Blondel 97] C. BLONDEL, Haüy et l'électricité : De la démonstration-spectacle à la
diffusion d'une science newtonienne, Revue d'histoire des sciences, Tome 50 n°3. pp. 265-282, 1997.
[Curie 81a] P. CURIE, J. CURIE, Développement par pression de l’électricité polaire
dans les cristaux hémièdres à faces inclinées, Comptes rendus des séances de l’Académie des Sciences, Paris 92, 1881.
[Lippmann 81] G. LIPPMANN, principe de la conservation de l’électricité, Annales de
chimie et de physique, cinquième série, tome 24, pp.145-178, Paris, 1881 [Curie 81b] P. CURIE, J. CURIE, Contractions et dilatations produites par des tensions
électriques dans les cristaux, Comptes rendus des séances de l’Académie des Sciences, Paris 92, 1881.
[Palmans 47] E. PALMANS, Théorie et pratique de la piézoélectricité, Eyrolles, Paris,
1947. [Brevet 46a] brevet N. 2486560 [Brevet 46b] brevet N. 2424111 [Lines 77] M.E. LINES, A.M. GLASS, Principles and applications of ferroelectrics and
related materials, oxford classic texts, 1977. [Jaffe 54] B. JAFFE, R.S. ROTH, S. MAZULLO, Piezoelectric properties of lead
zirconate lead titanate solid solution ceramics, J. Applied physics, 1954, Vol. 25, pp. 809-810)
[Niezrecki 01] C. NIEZRECKI, D. BREI, S. BALAKRISHNAN, A. MOSKALIK,
Piezoelectric actuation: state of art, The Shock and Vibration Digest 33, 269–80, 2001
[Ueha 93] S. UEHA, Y. TOMIKAWA, Ultrasonic motors theory and applications,
Oxford, 1993. [Ghio 04] A. GHIO, B. TESTON, C. FRENCK-MESTRE, C. ASTESANO, D.
SCHON, B. NAZARIAN, M. ROTH, J-L. ANTON, Perception de la parole et IRM : réalisation, évaluation et validation d'un système permettant une stimulation sonore de qualité en cours de séquence IRM, Proceedings de la Journée d'Etudes sur la Parole, pp. 241-244, 2004.

22
[Rouchon 05] J.F. ROUCHON, Enjeu des actionneurs piézoélectriques face aux applications aéronautiques, J3eA, Journal sur l’enseignement des sciences et technologies de l’information et des systèmes, Volume 4, Hors-Série 1, 6 (2005).
[Uchino 04] K. UCHINO, Piezoelectric actuators 2004 materials, design, drive/control,
modelling and applications, ACTUATOR 2004, Bremen, pages 38-47, Germany (Juin 2004).
Figure 1 : http://www.hpfriedrichs.com/rr-pzphone.htm Figure 2 : http://cmlaser.en.ecplaza.net/17.asp Figure 3 : http://www.hellopro.fr/generateur-piezoelectrique-d-ultrasons-p5-newtron-2000493-250361-produit.html Figure 4 : http://www.utc.fr/~farges/master_mts/2005_2006/projets/ablatherm/ablatherm.html Figure 5 : http://www.parapharmagelor.com/pince-a-tiques,fr,4,4628422.cfm Figure 6 : http://seikokinetic.net/Tag/Seiko-Premier-Kinetic-Perpetual/ Figure 7 : http://www.naturepixel.com/canon_ef_135mm_f2,0_l_essai_photo_5d_mark2.htm Figure 8 : http://www.techniques-management.fr/actu/dec2006/67 Figure 9 : http://www.bhv.fr/boutique/produits/cuisson-et-ustensiles/accessoires-pratiques/allume-gaz-piezo-2084718.html Figure 10 : http://web-japan.org/nipponia/nipponia32/fr/feature/feature15.html Figure 11 : http://www.ldlc.com/fiche/PB00099276.html Figure 12 : http://www.wothings.com/tag/capteur Figure 13 : http://fingerchip.pagesperso-orange.fr/biometrics/types/fingerprint_sensors_physics.htm Figure 14 : http://www.apem.fr/2-26797-Interrupteurs.php?prid=3&gclid=CK_u3dW6_KMCFY1k4wodYEfwIA#1 Figure 15 : http://lorelinerobbe.canalblog.com/archives/2010/05/10/17849254.html Figure 16 : http://www.draeger-medical.com/FR/fr/products/alcohol_drug_detection/screening/cdi_alcotest_7510.jsp Figure 17 : http://www.mobiletechworld.com/tag/piezoelectric/ Figure 18 : http://science.branchez-vous.com/upload/2008/09/rover.jpg

23
1.2. Modélisation de lois de comportement ferroélectrique
Un système piézoélectrique est un dispositif dont la fonction est principalement remplie grâce à une conversion d’énergie générée par un matériau piézoélectrique. Cette partie du document ne s’intéresse qu’au matériau sans tenir compte de la manière dont est fournie l’énergie électrique, ni de l’utilisation qui est faite du matériau. On cherche à observer et modéliser, dans l’absolu, le comportement du matériau.
Aujourd’hui si l’on considère que la majorité des systèmes piézoélectriques est réalisée à
partir de Titanate Zirconate de Plomb (PZT)4, et que ces matériaux sont ferroélectriques, il apparaît évident qu’il faut s’intéresser à l’hystérésis que présente l’évolution de leur polarisation en fonction du champ électrique.
La variation de polarisation peut induire des changements de dimension [Sachse 58]. Cependant, ces changements de dimension, n’auront lieu que si l’environnement de l’échantillon le permet. Le comportement mécanique a donc une influence sur le comportement électrique [Lynch 96].
Même si de nombreuses affirmations qui vont suivre sont généralisables à l’ensemble des
matériaux ferroélectriques, il faut garder à l’esprit que les exemples choisis traitent des PZT. 1) Définition des lois de comportement Les lois de comportement sont les relations qui permettent de connaître la réaction d’un
matériau à une sollicitation extérieure. Elles lient les grandeurs caractéristiques (les variables d’état) du matériau entre elles et sont suffisamment génériques pour ne pas faire intervenir l’environnement exact du matériau (elles régissent le comportement d’un volume élémentaire).
Comme dans le cas du ferromagnétisme, les matériaux ferroélectriques présentent un
comportement hystérétique lié à l’existence d’une structure en domaines de la matière [Le Bihan 74].
Figure 29. Domaines ferroélectriques dans PZT image AFAM (Atomic Force Acoustic
Microscopy) (extrait de notes de cours NOLIAC).
4 On trouve aussi dans la littérature, les dénominations suivantes : zirco titanate de plomb, zircono titanate de plomb, on utilisera donc le sigle PZT dans la suite du document.

24
2) Objectif La prise en compte de lois de comportement des matériaux les plus proches de la réalité dans
la modélisation des systèmes est devenue possible récemment, depuis que les techniques numériques de résolution des équations permettent des niveaux de précision élevés. On cherche alors à développer des modèles les plus exacts possibles dans le sens où ils reflètent au mieux les lois de comportement des matériaux. Ces lois de comportement peuvent avoir des utilités multiples. Dans notre cas, on cherchera à modéliser le lien existant entre les sollicitations électriques du matériau et sa réponse mécanique.
La difficulté et l’originalité de cet objectif résident dans le fait que les chercheurs qui s’intéressent à la ferroélectricité ne sont que rarement concernés par l’actionnement. Inversement, les chercheurs qui s’intéressent à l’utilisation des matériaux à des fins d’actionnement utilisent souvent des approximations de réversibilité dans leur modèle (section 2.3.). Il est extrêmement difficile de trouver de la littérature sur le lien entre le champ électrique et le comportement mécanique des céramiques piézoélectriques utilisées en actionnement. C’est ce que nous essayons de faire ici.
Ma thèse de doctorat portait sur la modélisation de l’hystérésis magnétique, j’ai donc
naturellement essayé de transposer les résultats obtenus dans ma thèse [th.] à la ferroélectricité. Ces activités ont été menées au sein de l’équipe ICHAMS (Interaction CHAmps Matériaux Structure) du LGEP.
1.2.1. Introduction
1) Quelle utilité de modéliser les lois de comportement ? La modélisation du comportement hystérétique des ferroélectriques présente un intérêt hors
du contexte de la piézoélectricité [Godefroy 96]. Ces matériaux sont utilisés dans les condensateurs en vertu de leur permittivité élevée. L’effet mémoire est mis en application dans les FeRAM (Ferroelectric Random Access Memory) et les diodes optiques [Godefroy 96].
Figure 30. Mémoires ferroélectriques extrait de
http://www.eetasia.com/ART_8800301437_480600_NP_9ed78a30.HTM.
Dans une approche d’utilisation des matériaux piézoélectriques, en général, on utilise une relation linéaire permettant de déduire la déformation à partir du champ électrique appliqué (section 2.3). Pourtant cette relation n’est valable que dans une zone très réduite de la plage d’utilisation. Cette approximation est raisonnable lorsque l’on cherche à pré-dimensionner un actionneur piézoélectrique. Cependant, il existe de nombreux cas où cette première approche ne suffit pas.
Les recommandations des constructeurs permettent de s’apercevoir que la gamme conseillée
d’utilisation des PZT est une faible partie de celle que les matériaux peuvent supporter. En particulier, occasionnellement et pour des durées courtes, le champ électrique peut être le double de celui préconisé par défaut.

25
Displacement vs Temperature(All Data is for an Input Voltage of 500 V)
0.00
0.50
1.00
1.50
2.00
2.50
3.00
3.50
4.00
4.50
5.00
0 50 100 150 200 250 300 350
Temperature (K)
Dis
plac
emen
t (um
)
PZT-5H #4 - ShimPZT-5H #5 - ShimPZT-5H #6 - Shim
Stack AStack BStack C
Figure 31. Recommandations d’utilisation des actionneurs Noliac en fonction du matériau (extrait de notes de cours NOLIAC).
Cette restriction repose sur le risque de dépolariser le matériau (section 1.2.3). Le risque est
maîtrisé si l’on connaît le comportement réel du matériau au travers de sa loi de comportement. En ce qui concerne l’utilisation des PZT en terme d’actionnement, la non linéarité, et, à plus
forte raison, la non réversibilité du déplacement en fonction de la tension électrique appliquée, est une difficulté dans le contrôle en boucle ouverte de ces actionneurs. Elle induit aussi des instabilités dans le contrôle en boucle fermée [Moheimani 06 chap. 1], [Jalili 08 chap. 7]. Une possibilité de réponse à cette difficulté réside dans l’intégration d’un modèle inverse de l’hystérésis du matériau dans les lois de commande [Moheimani 06]. On voit que pour cela aussi la modélisation de l’hystérésis s’impose.
Enfin le cycle de polarisation en fonction du champ électrique est une image des pertes au sein du matériau [Jalili 08 chap.7]. Il peut être important, dans le dimensionnement d’un actionneur sensible à la température, d’avoir une évaluation de la quantité de chaleur à dissiper [Loyau 09].
Figure 32. Comportement d’actionneurs PZT en fonction de la température (extrait de notes
de cours NOLIAC).
Strain vs. Electrical Field Strength
0,00
0,05
0,10
0,15
0,20
0,25
0,30
0,35
0,40
0,45
0,0 1,0 2,0 3,0 4,0 5,0 6,0 7,0 8,0 9,0
Electrical Field Strength
Stra
in (%
) S1S2H1E1
Max. Recommanded Electrical FieldStrength For Short Term application
Max. Recommanded ElectricalField Strength

26
2) Qu’est ce que la polarisation, lien avec la piézoélectricité ? Les matériaux diélectriques réagissent à un champ électrique appliqué en adoptant une
répartition particulière de leurs charges électriques. La polarisation est la grandeur électrique qui reflète la distribution des charges électriques dans le matériau. En l’absence de champ électrique extérieur appliqué au matériau, les particules élémentaires de celui-ci peuvent être polarisées ou non. Cela s’observe par exemple dans le cas de la molécule d’eau.
Figure 33. Moment dipolaire de la molécule d’eau (extrait de http://ww2.ac-
poitiers.fr/sc_phys/spip.php?article233&debut_autres_a=20). Cette molécule présente un moment dipolaire pr défini comme la demi-différence δ des
charges, multipliée par le vecteur qr allant du barycentre des charges négatives à celui des charges positives.
qp rr δ= (1.) Sur un volume V présentant un ensemble de moments dipolaires, on définit la polarisation P
r
comme l’intégrale sur ce volume des moments dipolaires présents.
∫∫∫=V
dVpP rr (2.)
On observe bien à partir de ces équations qu’il sera possible au sein d’un matériau d’obtenir des configurations telles que, avec un moment dipolaire, par exemple moléculaire, le volume présente, ou pas, une polarisation.
Avec ces notions, on peut observer le comportement du quartz, dont la maille élémentaire simplifiée est formée d’ions Si chargés positivement et d’ions O chargés négativement.
Figure 34. Maille élémentaire simplifiée du quartz sous l’action d’une force (extrait de
[Arnau 08]).

27
La force, exercée dans une direction particulière, déforme la maille et fait apparaître une
polarisation là où il n’y en avait pas initialement. On voit que pour que cette réaction électrique (la polarisation) à une grandeur mécanique (la
force) puisse avoir lieu, il faut que la maille ne présente pas de centre de symétrie. De fait, sur les 32 classes cristallines, 21 sont non centrosymétriques dans lesquelles 20 sont
piézoélectriques. Pour que la transformation d’énergie mécanique en énergie électrique soit complète, il faut
que la polarisation (ou plus exactement la variation de polarisation) agisse sur l’extérieur. Pour montrer quel en est le processus, on fait appel à des transformations mathématiques.
La valeur du potentiel électrique créé en tout point de l’espace par une distribution volumique
de polarisation vaut :
∫∫∫ ∇=V
dVr
pr )1()(rrrϕ (3.)
Cette expression peut s’écrire :
∫∫∫ ∇+∇−=V
dVrpp
rr ))(1()(
rrrϕ (4.)
Si la polarisation est constante, sa divergence est nulle et avec le théorème de Gauss, on obtient :
dSr
PnrS∫∫=)(rϕ (5.)
Dans cette expression, la surface S est la surface extérieure du volume V et Pn est la composante normale de la polarisation. La polarisation uniforme du matériau a donc le même effet qu’une répartition surfacique de charges σ=Pn [kittel 07]. Ces charges fictives sont celles du matériau diélectrique, elles ne sont pas libres et ne peuvent donc contribuer à l’énergie électrique. En revanche, elles agissent sur les électrodes qui peuvent à leur tour fournir des charges libres.
3) Pourquoi y a-t-il parfois hystérésis : cas d’un monocristal ? Il existe des matériaux dans lesquels les mailles élémentaires possèdent un moment dipolaire,
même en l’absence de contrainte mécanique. C’est le cas des céramiques cristallines de type pérovskite et du PZT en particulier.
La maille : Pour simplifier la présentation, nous ne traiterons dans cette partie que de la maille
tétragonale.

28
Figure 35. Structure tétragonale de la maille PZT au dessus (1) et en dessous (2) de la
température de Curie Tc avec O en bleu, Pb en gris, Ti ou Zr en noir (extrait de tutorial PI). Il apparaît qu’en dessous de la température de Curie Tc, la maille élémentaire du PZT
présente une polarisation spontanée. Chaque position de l’ion Ti ou Zr d’égale énergie est à priori équiprobable et il en résulte que la direction de la polarisation de la maille peut pointer vers n’importe laquelle de ces directions.
Le domaine : Cependant, lors de la synthèse du matériau, une minimisation énergétique a lieu. Les sites ne
sont alors plus équiprobables. La répartition des ions dans les différents sites résulte d’un compromis. Tout d’abord, le champ créé par la polarisation des mailles voisines tant à anti-aligner les polarisations. Ensuite, deux aspects sont à prendre en considération. Tout d’abord, lors du refroidissement (la synthèse du matériau se fait à une température au-delà de la température de curie), d’un point de vue mécanique, les configurations ne correspondant pas toutes aux mêmes dimensions, le cristal doit « gérer » l’occupation du volume. Ensuite, d’un point de vue électrique, pour diminuer le champ dépolarisant, il est moins couteux énergétiquement que dans un même cristal la répartition des polarisations se fasse par domaines [Heywang 08]. Certains auteurs parlent aussi d’une minimisation de l’énergie de la paroi par le biais de domaines à 90° [Safari 08]. On observe des régions du matériau dans lesquelles la polarisation est uniforme (les domaines) séparés par des parois [Fousek 69].
Figure 36. Paroi entre deux domaines à 90° (extrait de [Safari 08]).
Le monocristal : Il en résulte qu’après une opération de polarisation (orientation des domaines dans la
direction la plus proche du champ appliqué), puis de dépolarisation (retour à une polarisation nulle,

29
en moyenne), les situations de départ et d’arrivée n’ont qu’une faible probabilité d’être identiques. On est typiquement face à une situation de comportement hystérétique [Ballas 08].
Figure 37. Configuration en domaines a) initiale, b) sous champ, c) après dépolarisation.
La maîtrise de la structure en domaines permettrait de contrôler les propriétés du matériau.
C’est un défi et de nombreux chercheurs travaillent à le relever [Safari 08]. La structure en domaine est influencée par la taille des cristaux [Stevenson 99].
La céramique : Une céramique, comme les PZT utilisés en actionnement, est un agrégat de cristaux orientés
aléatoirement. Chaque cristal est un grain de la céramique. Au moment de la synthèse de la céramique, on agit sur les propriétés du matériau en
modifiant la proportion de ziconium et de titane (rapport Zr/Ti), en contrôlant le dopage, ou en agissant sur le procédé de fabrication [Pennanéach 02]. On peut aussi influencer le comportement du matériau en l’intégrant dans un ensemble [Erba 00, Million 03].
Finalement, on obtient, comme dans le cas du ferromagnétisme, des matériaux durs et des
doux dont les utilisations seront différentes [Heywang 08], [Safari 08 chap. 4]. Les différences sur leurs applications sont données dans [Cugat 02] et sur les principales caractéristiques sont données dans [Safari 08 chap.4].
Figure 38. Photo de grains PZT doux et dur (extrait de [Walter 01]).
Modèle de la maille et du cristal monodomaine : Le comportement de la maille des PZT peut être décrit par la théorie de Landau [Godefroy
96]. La fonction A représente l’énergie libre d’Helmotz de la maille, elle est liée à l’énergie
interne U, l’entropie S et la température T. STUA −= (6.)
En négligeant l’énergie électromécanique, sa dérivée s’écrit : ij
ijk
k dsSdTdPEdA σ++= (7.)

30
Où E est le champ électrique, P la polarisation, σ la contrainte et s la déformation. L’hypothèse de Landau permet de développer l’énergie libre au voisinage de la température
T0 en fonction paires de la polarisation P (on se limite à une composante de P et les états +P et –P ont même énergie). On obtient alors l’expression de l’énergie libre suivante pour un développement au sixième degré (transitions du premier ordre) :
62400 64)(
2PcPbPTTaAA ++−+= (8.)
a, b, c font en sorte que les phases paraélectrique et ferroélectrique soient stables. On obtient alors la Figure 39.
Figure 39. (a)Variation de l’énergie libre en fonction de la polarisation et de la température,
(b) variation de la polarisation spontanée en fonction de la température. On en déduit alors le champ électrique comme étant la dérivée de l’énergie libre par rapport à
la polarisation.
dPdAE = (9.)
On obtient une relation polynomiale entre champ électrique et polarisation. 53 PPPE γβα ++= (10.)
C’est la relation qui est représentée sur la Figure 40.
Figure 40. Polarisation en fonction du champ électrique (extrait de [Safari 08]).
La relation obtenue dans l'équation 10 est la courbe A, B, C, D. Les états compris entre B et C
étant instables, la polarisation commute directement de C à C’ et de B à B’ sans prendre de valeur intermédiaire. On observe alors un cycle d’hystérésis.

31
Le champ coercitif obtenu est deux à trois fois plus grand que celui mesuré, le modèle ne tient pas compte des interactions entre domaines. Pour en tenir compte, il faut s’intéresser à leur couplage mécanique [Fousek 69].
Modèle du cristal : Dans [Heywang 08], une fois ces interactions prises en compte, on obtient la Figure 47.
Figure 41. Niveau d’énergie dans une paroi (extrait de [Heywang 08]).
4) Comment intervient le couplage électromécanique ?
Les matériaux dans lesquels on observe cet arrangement en domaines sont les matériaux
ferroélectriques, ils ont la propriété de piézoélectricité. Les 5 classes cristallines ferroélectriques sont incluses dans les 20 classes piézoélectriques.
Dans le cas de la maille de PZT, qui nous servira d’exemple, dans la phase ferroélectrique (en
dessous de la température de Curie), la maille élémentaire n’a pas les mêmes dimensions dans toutes les directions de l’espace. La dimension dans la direction portant la polarisation est plus grande que les autres [Detalle 08] quelle que soit la forme de la maille, c’est ce qu’on appelle la déformation spontanée.
L’existence de ces différentes phases et leur dépendance à la température étaient connue en
1950. Le diagramme en est donné, par exemple dans [Sachse 58].

32
Figure 42. Formes de la maille Perovskite a) cubique P=0, b) quadratique, c)
orthorhombique, d) rhomboédrique (extrait de [Safari 08]). Dans chaque domaine, la modification de la polarisation entraîne une variation des
dimensions du domaine (sauf si la polarisation est renversée à 180°). A l’échelle du grain contenant plusieurs domaines, les mailles sont ordonnées de la même
façon. On est dans le cas d’un monocristal. Les modifications des dimensions sont régies par les déplacements de parois.
Les céramiques, sont obtenues par agrégation de grains.
Figure 43. Illustration des grains, domaines, parois (extrait de notes de cours NOLIAC).
Bien sur, tout cela est une vision d’ensemble, on trouvera des informations plus complètes
notamment dans [Heywang 08]. Modèle de la maille et du cristal monodomaine : Dans le système quadratique, qui sera pris comme exemple, on note x3 la déformation de la
maille dans la direction de polarisation et x1 la déformation transverse, elles sont proportionnelles à la polarisation spontanée Ps par l’intermédiaire des coefficients d’électrostriction Q.
Strain caused by the field

33
2121 sPQx = 2
113 sPQx = (11.) Pour mettre en évidence le couplage, on fait appel à la grandeur G qui représente l’enthalpie
libre, c’est la différence entre l’énergie libre et les énergies mécanique, couplée et électrique stockée.
)():()( PAPAAAG Δ−Δ−Δ−Δ=Δ σσ (12.)
)(21(
61
41
21 2
322
2111
642 σσσγβα ++−++=Δ sPPPG
))(21)( 2
625
244432312112 σσσσσσσσσ ++++++ ss
EPPQPQ ss −++− ))(( 32
11212
12 σσσ (13.)
Avec
32
2
χ=∂∂
=∂Δ∂
PE
PG (14.)
On obtient :
3
3113033 E
sPQd s == χε (15.) [Safari 08]
On a fait apparaître le couplage entre déformation et champ électrique, le coefficient est lié à
la polarisation spontanée. La piézoélectricité est un phénomène d’électrostriction autour d’un point de polarisation.
On a traité ici le cas de la maille quadratique, pour les PZT, c’est le cas des matériaux à faible pourcentage de Zr, si le pourcentage est élevé, la maille sera rhomboédrique [Heywang 08].
Modèle du cristal et donc du grain : On peut écrire les coefficients piézoélectriques dans un système de coordonnées arbitraire à
partir des coefficients définis dans le système du cristal par le biais d’une matrice de transformation M.
lmnknjmilijk dMMMd =* (16.)
Le coefficient *33d mesuré dans une direction faisant un angle θ avec l’axe polaire de la maille
quadratique vaut alors : )cos)((sincos 33
23115
2*33 dddd θθθ ++= (17.)
Ce coefficient est représenté en Figure 44.
Figure 44. Coefficient piézoélectrique équivalent dans le cas d’un cristal en fonction de la
direction de mesure : cas du BaTiO3 (extrait de [Heywang 08]).

34
Modèle de la céramique : Dans la céramique, on considère un nouveau coefficient de couplage équivalent eqd33 qui tient
compte de la répartition des grains entre eux et applique des techniques d’homogénéisation pour obtenir un « milieu effectif approximé ». Des calculs menés dans le cas du PZT montrent que la polarisation rémanente est 0,7 fois la polarisation spontanée [Heywang 08].
Dans le cas de films minces, on obtient :
311211
133333
2 dss
sdd EE
Eeq
−−= (18.)
1.2.2. Modélisation de la polarisation des ferroélectriques en fonction du champ électrique
Dans cette partie, on montrera et situera la méthode développée et testée pour modéliser le
comportement de la polarisation électrique du matériau en fonction du champ électrique qui lui est appliqué.
C’est la volonté de s’intéresser aux matériaux piézoélectriques et une collaboration avec le
LGEF qui nous ont permis de confronter l’approche de modélisation de l’hystérésis par Preisach aux cycles de ferroélectricité. Nous avons donc modélisé les cycles de ferroélectricité (polarisation en fonction du champ électrique) fournis par le LGEF grâce au modèle de Preisach. Encore une fois, la précision de ce modèle a pu être montrée [AI.8].
1) Les différents modèles de la polarisation en fonction du champ Ici on prend réellement conscience des milieux d’origine des différents intervenants du
monde de la piézoélectricité. En effet, les modèles de représentation de l’hystérésis ferroélectrique s’appuient sur des représentations issues de la mécanique, de la thermodynamique, du génie électrique, …
Commençons par une décomposition en deux grandes familles. On distingue les modèles
s’appuyant sur des considérations physiques, on les appellera modèles physiques. Ils utilisent les lois physiques entraînant la relation de comportement. Les autres modèles, que l’on appellera empiriques, ont pour seul but de refléter le comportement au travers de représentations, par exemple mathématiques.
Pour chacune de ces catégories, il existe de nombreux modèles. Nous ne les citerons pas tous. A mon sens, il faut garder à l’esprit que les modèles empiriques ont l’intérêt d’être précis
mais nécessitent de connaître à l’avance une partie de la loi de comportement pour pouvoir identifier les paramètres du modèle. On peut alors observer comment le modèle restitue les données qui ont servi à son identification. Si le niveau de précision est suffisant, on peut valider la prédictibilité du modèle en l’utilisant pour simuler des comportements qui n’ont pas servi à l’identification. Un modèle empirique peut donc être prédictif.
En ce qui concerne les modèles physiques, ils sont en général moins précis que les modèles
phénoménologiques (ils dépendent souvent de moins de paramètres). Cependant, ils peuvent servir à comprendre les mécanismes physiques à l’origine du comportement. Ils peuvent parfois aussi permettre d’établir la composition du matériau qui conduira à une propriété particulière.

35
Les modèles physiques appliqués à la ferroélectricité : Ici, on rencontre principalement les modèles de type multi échelle. Le premier est dit thermodynamique, il repose sur la théorie de Ginzburg-Landau et a été
appliqué au BaTiO3 par Devonshire. Ce modèle, bien que de nature physique ne permet pas de comprendre les principes microscopiques en jeu. Il considère la matière comme un milieu continu et les variables sont parfois internes au modèle. Une description et analyse en sont faites dans [Heywang 08]. C’est le modèle dont certaines équations ont été données plus haut.
Le modèle microscopique vient compléter le modèle de Landau d’un point de vu des
interactions entre atomes [Godefroy 96]. Connaissant la structure cristallographique et les charges des ions, on peut calculer les interactions électriques. Ce modèle permet de tenir compte de la dynamique alors que le précédent était statique. Un exemple d’application de ce modèle permet de comprendre les trois conditions nécessaires à l’apparition de ferroélectricité.
a) L’existence d’un champ électrique local non nul au niveau de chaque ion polarisable.
0εγPEE appliquélocal
rrr
+= (19.)
b) Une polarisabilité α qui décroit avec la température, N est la densité de mailles. localETNPrr
)(0 αε= (20.) c) Une polarisation qui sature lorsque toutes les mailles sont polarisées, μ est le moment
dipolaire. μr
rNPsaturée = (21.)
Le dernier, plus récent, est dit du premier principe. Celui là reprend effectivement chacune des considérations physiques qui sont à l’origine de la ferroélectricité. Pour calculer l’énergie des atomes dans les différentes configurations, on résout un faisceau d’équation de Schrödinger. Ce modèle a permis d’expliquer les répercussions de la constitution du matériau sur ses propriétés. Une description et analyse en sont faites dans [Heywang 08 chap.21] à ma connaissance ce modèle ne tient pas compte des effets hystérétiques.
Les modèles empiriques appliqués à la ferroélectricité : La transition entre les modèles physiques et phénoménologiques est progressive. Afin de tenir
compte des non réversibilités de l’hystérésis, E. Boucher introduit dans un modèle thermodynamique de Devonshire, un terme dissipatif [Boucher 02]. Il en propose une représentation par schéma électrique.
La résolution du modèle de Landau montré dans l’équation 10, le conduit à l’expression :
)1(2
332
2
−=r
cr P
PEPPE (22.)
L’introduction du terme dissipatif donne :
)1(2
332
2
−+∂∂
=r
cr P
PEPP
tPE τ (23.)
Il reste à identifier τ à partir de mesures. Dans cette même thèse, un deuxième terme dissipatif de type frottement sec est ajouté. Globalement, le modèle permet de refléter le comportement des céramiques en fréquence et sous contrainte.
Comme exemple de modèle phénoménologique reposant sur un modèle thermodynamique,
on peut renvoyer à celui utilisé par O. Guillon dans [Guillon 03].

36
Comme exemple de modèle phénoménologique reposant sur un modèle mécanique, on peut
citer celui de G. Sebald [Sebald 04] ou celui de [Sashida 93]. Comme exemple de modèle phénoménologique reposant sur un modèle électrique, on peut
citer celui de [Sashida 93]. Et cela nous amène aux modèles purement mathématiques. Le modèle de Preisach fait partie de ces modèles et semble le plus connu et le plus utilisé,
nous reviendrons sur ce modèle dans la partie suivante. N. Jalili, dans [Jalili 08 p.163], propose un modèle qui permet de tenir compte des effets
temporels pour palier ce manque du modèle de Preisach. Ce modèle est simple d’implémentation et s’inverse facilement. Il s’agit du modèle de Prandtl-Ishlinskii. Il s’appuie sur la décomposition d’un cycle d’hystérésis en une somme de cycles élémentaires dont les paramètres sont définis Figure 45.
Figure 45. a) Opérateur de Prandtl-Ishlinskii et fonction de pondération W, b) cycle obtenu
(extrait de [Jalili 08]).
Dans le même chapitre de [Jalili 08], d’autres modèles sont évoqués, en particulier un utilisant une représentation par schéma électrique.
Choix d’un modèle : Quoi qu’il en soit, les modèles physiques, multi échelle en particulier me semblent être les
plus prometteurs. Ils permettent de comprendre les phénomènes physiques à l’origine des lois de comportement et laissent entrevoir la possibilité de déterminer numériquement la composition et structure d’un matériau dont on attend des propriétés données. Cependant, en l’état actuel des connaissances sur la piézoélectricité, ces modèles doivent encore faire l’objet de recherche afin d’être aussi prédictifs que les modèles phénoménologiques. D’autre part, pour des applications telles que l’inversion de la loi de comportement en vue du contrôle en boucle ouverte d’un actionneur piézoélectrique, ces modèles sont trop exigeants en temps de calcul.
C’est donc, encore une fois, l’application que l’on fait du modèle qui va mener vers la
catégorie phénoménologique ou la catégorie physique. En ce qui concerne les modèles phénoménologiques, je ne suis pas sûr qu’un soit plus précis
que les autres. Tout dépend du niveau de discrétisation que l’on choisit. Il est même probable que certains ne soient qu’une représentation différente des autres. L’utilisateur choisira donc la représentation avec laquelle il se sent le plus à l’aise.
L’intérêt majeur que je vois au modèle de Preisach est de mettre en place un formalisme qui
permet, sous réserve de restrictions somme toute mineures [th.], de modéliser la plupart des comportements hystérétiques. Ce modèle peut donc s’appliquer à la ferroélectricité comme au

37
ferromagnétisme ou aux autres domaines faisant apparaître de l’hystérésis symétrique (entre croissance et décroissance).
2) Présentation du modèle de Preisach Le modèle de Preisach appliqué aux matériaux ferroélectriques est clairement décrit dans
[Cima 02]. Un complément quant aux phénomènes que ce modèle permet de prendre en compte est donné dans [Setter 02 p.353]. Dans ces deux références, on peut lire que de nombreux utilisateurs ont adopté ce modèle.
Le modèle de Preisach repose sur la décomposition d’un cycle d’hystérésis en une somme de cycles élémentaires dont les paramètres sont définis Figure 46.
Figure 46. a) Opérateur de Preisach, b) Triangle de Preisach (extrait de [Jalili 08]).
La répartition des opérateurs nécessaires pour décrire un cycle d’hystérésis mesuré est faite
dans le plan (α,β) appelé triangle de Preisach, cette répartition s’appelle la fonction de distribution μ. La polarisation électrique est calculée en dénombrant le nombre d’opérateurs dans la position saturée à +1.
∫∫+
=S
ddaP βαβαμ ),( (24.)
C’est dans la manière de déterminer cette fonction de distribution μ(α,β) que l’on voit des
différences entre les utilisateurs. Les deux références proposent des manières différentes : On peut envisager d’écrire la fonction de distribution sous une forme analytique et d’y
intégrer autant de paramètres que nécessaire à la bonne restitution des mesures qui servent au calibrage. C’est l’approche utilisée dans [Setter 02 p.353].
On peut aussi effectuer des mesures et en déduire directement la valeur de la fonction de
distribution pour des couples de variables. C’est ce qui est fait dans [Cima 02] et [Jalili 08 p.165]. Dans ces deux cas, le protocole de mesure est le même et s’appuie sur les courbes de renversement.
3) Méthode des cycles centrés La méthode développée au cours de ma thèse pour la modélisation de l’hystérésis
magnétique est décrite dans [A.I.2]. Elle s’appuie sur l’hypothèse que les cycles sont symétriques. Elle ne nécessite de mesurer que le comportement de polarisation du ferroélectrique lorsque le champ électrique est triangulaire d’amplitude croissante.

38
Figure 47. Données nécessaires à l’identification de la fonction de distribution.
A partir de ces données, la fonction de distribution est déterminée. La validité des hypothèses peut être vérifiée dans la restitution des cycles ayant servi à l’apprentissage.
Figure 48. Restitution d’un cycle appris.
On peut aussi valider réellement le modèle en l’utilisant pour décrire des trajets particuliers du champ électrique.
-1500 -1000 -500 0 500 1000 1500 2000 2500
-40
-30
-20
-10
0
10
20
30
40
50
E(V/mm)
P(C
/mm
²)
Figure 49. Prédiction de cycles non appris.
On constate que le modèle et la démarche fonctionnent bien dans le cas du matériau testé ici. C’est ce qui est présenté dans [A.I.8].
Contrairement à ce qui a été évoqué par certains auteurs, le modèle de Preisach permet
de tenir compte d’effets temporels comme le vieillissement ou fréquentiels dans la variation du champ électrique. Il suffit de faire porter cette dépendance par la fonction de distribution. C’est ce qui a été présenté dans [A.I.3] et [A.I.6].
On peut aussi envisager d’intégrer l’effet de la température sur l’allure des cycles dans
la fonction de distribution.
En dernier lieu, hormis la symétrie des cycles, cette méthode ne fait aucune hypothèse sur la « silhouette » des cycles. Elle peut donc déterminer la fonction de distribution donnant le champ électrique en fonction de la polarisation. Cela évite d’avoir à inverser le modèle dans des applications comme le contrôle en boucle ouverte d’actionneurs.

39
Encore une fois, nous disposons donc d’un modèle performant de loi de comportement
même si celui-ci manque de prédictibilité vis-à-vis d’un matériau non encore synthétisé (les données nécessaires au modèle doivent être mesurées).
1.2.3. Modélisation de la déformation des ferroélectriques en fonction de la polarisation.
Dans les applications d’actionnement, c’est la déformation du matériau qu’il importe de
déterminer à partir du champ électrique appliqué. On a vu que la direction de la polarisation d’une maille indique ses dimensions, et que lorsque cette maille est incluse dans un réseau cristallin qui forme un grain qui est lui-même intégré dans une structure composée d’autres grains, des techniques d’homogénéisation sont appliquées.
Dans un premier temps, nous allons nous intéresser au grain, c'est-à-dire à un des
monocristaux qui constituent la céramique. De par la présence des domaines orientés aléatoirement, celui-ci n’est pas piézoélectrique pour de faibles sollicitations. En effet, les effets sur un domaine sont compensés par les effets sur ses voisins. Ce n’est qu’après l’opération dite de polarisation que le cristal devient piézoélectrique. C’est aussi ce que l’on a observé grâce au modèle thermodynamique. On a montré que la piézoélectricité est un cas particulier d’électrostriction autour d’une polarisation rémanente.
Pour obtenir les plus grands coefficients de couplage, à l’échelle de la céramique, avec
l’équation 15, il faut placer la céramique dans la polarisation rémanente la plus élevée possible.
Figure 50. Zone d’utilisation de la déformation d’un ferroélectrique (extrait de
[Heywang 08]).
Nous avons déjà évoqué l’approche thermodynamique puis par homogénéisation comme modélisation du comportement. Une approche plus détaillée est donnée dans [Heywang 08 Chap.4].
Dans [Safari 08 chap.4], on obtient les différents coefficients piézoélectriques à utiliser dans la relation polarisation/dimension.

40
Méthode proposée : Les modèles évoqués dans la modélisation de la polarisation sont des modèles
unidimensionnels. Ils moyennent les processus de variation de la polarisation à l’échelle de l’ensemble du matériau piézoélectrique. Il semble donc illusoire de mettre en place une relation reposant sur des considérations physiques entre la polarisation et le déplacement.
Dans [A.I.8], nous avons supposé que la déformation du matériau était proportionnelle
à la valeur absolue de la polarisation (et non au champ). Le modèle ainsi obtenu a permis de retrouver les courbes dites en ailes de papillon qui ont été comparées à celles mesurées.
Figure 51. Comparaison de déformations mesurées (à droite) et simulées (à gauche).
Cette approximation peut être utilisée dans une commande d’actionneur même si on voit qu’elle n’est pas parfaite.
D’autres relations de la déformation en fonction de la polarisation peuvent être employées, on en trouve de simples dans [Boucher 02 p.166] et [Cima 02].
Aujourd’hui, pour le contrôle des actionneurs on peut utiliser une alimentation en charges
électriques plutôt qu’en tension [Moheimani 06 chap. 11]. Cela linéarise (en première approximation) le système mais l’électronique d’alimentation de l’actionneur devient alors coûteuse, volumineuse et complexe. Ce n’est pas une solution d’avenir.
Pour cette application, le niveau de précision à atteindre n’est pas critique. L’approche que nous proposons devrait donc suffire.
1.2.4. Comportement piézoélectrique sous contrainte
Le dernier aspect à développer dans la modélisation des lois de comportement offre une perspective majeure. Jusqu’à maintenant, on a abordé la relation champ électrique/déformation d’un matériau libre de se déformer. In fine, le matériau sera contraint lors de son utilisation. On cherche donc dans cette partie à caractériser le comportement du matériau sous contrainte. Cet aspect est d’autant plus important que le matériau peut être dépolarisé par l’application d’une contrainte [Elhadrouz 05].
L’objectif d’une modélisation fine de ce comportement est l’obtention des informations mécaniques (contraintes, déplacements) par la simple mesure des informations électriques (courant, tension). Cela permettrait alors d’utiliser le matériau en même temps comme capteur et comme actionneur, l’intérêt est particulièrement marqué dans les micro systèmes [Cugat 02]. La faisabilité a été montrée dans [Ballas 04].
Encore une fois, l’approche thermodynamique permet d’intégrer la contrainte mécanique dans le comportement du matériau. C’est l’approche la plus couramment utilisée. Précisément c’est celle que nous utiliserons dans les sections suivantes et qui est adoptée dans les normes IEEE de la piézoélectricité.

41
Afin d’utiliser le matériau de manière optimale, nous suggérons une approche complémentaire. Celle-ci se décompose en deux étapes : une première de caractérisation fine (par la mesure), une seconde de modélisation par le modèle de Preisach.
1) Caractérisation de lois de comportement sous contrainte mécanique
Une plateforme de caractérisation des matériaux actifs a été réalisée au LGEP. Elle permet
entre autre de caractériser des échantillons sous contrainte mécanique imposée. Nous avons mis à profit l’expérience en actionneurs piézoélectriques en équipant une machine de traction d’un système d’asservissement de force (réalisé par un actionneur piézoélectrique) de manière à maintenir constante la contrainte subie par les matériaux à caractériser même lorsqu’il s’agit de matériaux actifs se déformant.
Ce dispositif permettra ainsi d’étudier le comportement des matériaux piézoélectriques sous contrainte mécanique.
Classiquement, le comportement sous contrainte mécanique est mesuré autour d’un point de polarisation, l’effet de la contrainte est intégré dans le coefficient de couplage [Guillon 03], [Walter 01b], [Boucher 02]. Pourtant la contrainte a aussi un effet sur les pertes et sur la largeur du cycle d’hystérésis [Mitrovic 01], [Lynch 96].
2) Modélisation de lois de comportement sous contrainte mécanique La plupart des auteurs qui s’intéressent aux caractérisations sous contrainte mécanique le font
dans le but d’utiliser par la suite le matériau en tant qu’actionneur. Ils cherchent donc à connaître la loi de comportement autour d’un point de fonctionnement et à en faire une approximation linéaire.
Les non linéarités induites par la contrainte sont prises en compte par le biais du coefficient
de proportionnalité.
Figure 52. Dépendance de d33 à la contrainte sur 5 matériaux extrait de [Safari 08].
Ce que notre approche de modélisation suggère est de faire porter la non linéarité sur la
fonction de distribution, nous avons montré que c’était possible dans le cas du magnétisme [AI. 6].
Cela permettra de modéliser le comportement global du matériau sous contrainte et pas
uniquement autour d’un point de polarisation.
42
1.2.5. Perspectives
Cette partie du document sur les lois de comportement des matériaux piézoélectriques ouvre
de nombreuses perspectives. La première perspective concerne le contrôle des actionneurs piézoélectriques. La volonté de
miniaturiser les dispositifs piézoélectriques conduit à tenter de s’affranchir d’un contrôle en boucle fermée nécessitant un capteur. Pour cela, il faut être en mesure de modéliser convenablement le matériau piézoélectrique. Cela passe par la modélisation de sa polarisation en fonction du champ électrique. On a montré que le modèle de Preisach était pertinent. Il faut ensuite inverser le modèle. On a montré que notre technique de détermination de la fonction de distribution permettait d’obtenir directement un modèle inverse. Il reste donc à tester l’efficacité expérimentalement.
Cet objectif fait appel à des compétences en commande. Certains des laboratoires qui proposent des travaux dans ce domaine sont en Allemagne (entreprise PI à Karlsruhe, entreprise motion-ctrl à Lemgo, Institut de la théorie du contrôle et des systèmes d’ingénierie à Dortmund) et en république tchèque (Faculté d’ingénierie électrique à Prague). Aucun n’utilise l’approche que nous suggérons dans ce document. Il sera ensuite intéressant de comparer les approches.
Il faut aussi être en mesure de faire le lien entre polarisation et déformation mécanique sous
contrainte. Pour cela, il semble qu’il sera possible de le faire en utilisant le modèle de Preisach dont la fonction de distribution devra être paramétrée en contrainte. Des mesures complémentaires devront être effectuées pour valider l’approche. Cela nécessitera un partenariat avec des laboratoires effectuant de la synthèse de matériau (par exemple l’EPFL en Suisse ou l’institut Nara des sciences et technologies). Ici la collaboration avec le LGEF devra être renforcée.
Le modèle de Preisach pourra ensuite tenir compte de la contrainte. Cependant, il faut être en mesure de distinguer les différents processus physiques mis en jeu afin d’interpréter les résultats. Pour cela, les modèles multi échelles comme ceux développés au LGEP peuvent être d’une grande utilité. Ces modèles devront être adaptés à la ferroélectricité. On entrera alors dans les domaines de l’institut de science des matériaux de l’université du Connecticut, de l’institut Carnegie à Washington, de l’institut de science des matériaux de Dresde mais avec une approche issue de la magnétostriction.
Le deuxième aspect concerne la possibilité de déterminer les conditions mécaniques dans
lesquelles agit le matériau piézoélectrique à partir de la mesure des grandeurs électriques. En effet, une bonne connaissance du comportement du matériau doit permettre à partir des valeurs de tension et courant fournies d’en déduire l’état mécanique du matériau (déformation, contrainte). Cela passe encore par une caractérisation fine des lois de comportement du matériau, tant d’un point de vu expérimental (utilisation du banc de mesure développé au LGEP) que d’un point de vue numérique (développement de modèles proches de la réalité). L’application est celle mise en œuvre à l’université des Saarlandes à Saarbrucken mais nous avons pour vocation à intégrer l’effet des conditions mécaniques.
1.2.6. Références
[Sachse 58] H. SACHSE, Les ferroélectriques, Dunod, Paris, 1958. [Lynch 96] C.S. LYNCH, The effect of uniaxial stress on the electro-mechanical
response of 8/65/35 PLZT, Acta mater., vol. 44, n. 10, 1996, pp.4137-4148.

43
[Le Bihan 74] R. LE BIHAN, M. MAUSSION, Observation des domaines ferroélectriques au microscope électronique à balayage, Revue de physique appliquée, tome 9, Mars 1974, pp.427-432.
[Godefroy 96] G. GODEFROY, Ferroélectricité, Techniques de l’ingénieur, Référence
1870, 10 sept. 1996 [Moheimani 06] S.O. REZA MOHEIMANI, A. J. FLEMING, Piezoelectric transducers for
vibration control and damping, Springer, 2006. [Jalili 08] N. JALILI, Piezoelectric-based vibration control, Springer, 2008. [Loyau 09] V. LOYAU, Y.P. LIU, F. COSTA, Analyses of the heat dissipated by losses
in a piezoelectric transformer, IEEE Transactions on Ultrasonics, ferroelectrics, and frequency control, Vol. 56, No. 8, pp. 1745-1752, 2009
[Arnau 08] A. ARNAU, Piezoelectric transducers and applications, Springer, 2008. [Kittel 07] C. KITTEL, Physique de l’état solide, Dunod, 2007. [Heywang 08] W. HEYWANG, K. LUBITZ, W. WERSING, Piezoelectricity evolution and
futur of a technology, Springer, 2008. [Safari 08] A. SAFARI, E. KORAY AKDOGAN, Piezoelectric and acoustic materials
for transducer applications, Springer, 2008. [Fousek 69] J. FOUSEK, V. JANOVEC, The orientation of domain walls in twinned
ferroelectric crystals, Journal of applied physics, Vol. 40, No. 1, 1969. [Ballas 08] R.G. BALLAS, Piezoelectric multilayer beam bending actuators, Springer,
2008. [Stevenson 99] P.J. STEVENSON, D.A. HALL, The effect of grain size on the high field
dielectric properties of hard PZT ceramics, Ferroelectrics, Vol. 223, pp. 309-318, 1999.
[Pennaneach 02] D. PENNANEAC’H PERSON, Elaboration de couches minces de PZT
Influence du procédé sur les propriétés physiques et structurales, Thèse de doctorat de l’ENS Cachan, soutenue le 12 Novembre 2002.
[Erba 00] F. ERBA, Contribution à l’étude du contrôle de forme d’une structure
adaptative : Elaboration et caractérisation de piézocomposites à connectivité 0-3, Thèse de doctorat de l’Université de Franche Comté, soutenue le 20 Décembre 2000.
[Millon 03] C. MILLON, Contribution à l’étude de procédés de réalisation de structures
métal/PZT/métal sur silicium pour microsystèmes piézoélectriques, Thèse de doctorat de l’INSA de Lyon, soutenue le 16 Juillet 2003.
[Cugat 02] O. CUGAT, Micro-actionneurs électro actifs, Hermes, 2002. [Walter 01] V. WALTER, P. DELOBELLE, P. LE MOAL, E. JOSEPH, M. COLLET, A
piezo-mechanical characterization of PZT thick films screen-printed on alumina substrate, Sensors et actuators A, 96, pp. 157-166, 2001.

44
[Detalle 08] M. DETALLE, Elaboration et caractérisation de films ferroelectriques
relaxeurs de PMN-PT : Integration sur Silicium et applications MEMS, Thèse de doctorat de l’Université des sciences et technologies de Lille, soutenue le 12 Juin 2008.
[Boucher 02] E. BOUCHER, Elaboration et caractérisation de céramiques PZT bi-
substituées et modélisation non linéaire de leur comportement en contrainte et en champ électrique, Thèse de doctorat de l’INSA de Lyon, soutenue le 13 Décembre 2002.
[Guillon 03] O. GUILLON, Caractérisation électromécanique et modélisation de
céramiques ferroélectriques de type PZT, Thèse de doctorat de l’Université de Franche Comté, soutenue le 16 Septembre 2003.
[Sebald 04] G. SEBALD, Nouveaux monocristaux à forte conversion piézoélectrique :
croissance, modélisation et caractérisation, Thèse de doctorat de l’INSA de Lyon, soutenue le 20 Septembre 2004.
[Sashida 93] T. SASHIDA, T. KENJO, An introduction to ultrasonic motors, Oxford
science publications, 1993. [Cima 02] L. CIMA, Caractérisation et modélisation des couches minces de céramiques
ferroélectriques, Thèse de doctorat de l’ENS Cachan, soutenue le 13 Décembre 2002.
[Setter 02] N. SETTER, Piezoelectric materials in devices, Setter, 2002. [Elhadrouz 05] M. ELHADROUZ, T. BEN ZINEB, E. PATOOR, Modélisation
phénoménologique du comportement de céramiques ferroélectriques et ferroélastiques, Mécanique et industries, Vol. 6, pp. 337-342, 2005.
[Ballas 04] R.G. BALLAS, H.F. SCHLAAK, A. KOLB, A. MOSSINGER, P.
MEISSNER, A.J. SCHMID, U. TOPFER, H. MURMANN, G. MUNZ, M. MAICHL, High accuracy sensor electronics for deflecting measurement of a piezoelectric bending beam multilayer actuator, ACTUATOR 2004, Bremen, pages 60-63, Germany (Juin 2004).
[Walter 01b] V. WALTER, Caractérisation et modélisation électromécanique de dépôts
de couches épaisses de PZT sérigraphiées sur substrat d’alumine, Thèse de l’université de Franche Comté, 2001.
[Mitrovic 01] M. MITROVIC, G.P. CARMAN, F.K. STRAUB, Response of piezoelectric
stack actuators under combined electro-mechanical loading, International journal of solids and structures, Vol. 38, pp. 4357-4374, 2001.

45
1.3. Etude de dispositifs piézoélectriques élémentaires Compte tenu des difficultés énoncées dans la partie 2.2 quand à la prise en compte de
l’hystérésis dans le calcul des déformations des PZT, nous utiliserons dans ce chapitre l’approche classique. Nous nous plaçons donc dans les hypothèses linéaires.
Dans ce cadre, les relations de la piézoélectricité sont : kkijij EdS = (25.)
jkijki TdD = (26.) Où S est la déformation, E le champ électrique, D l’induction électrique, T la contrainte
appliquée et d un coefficient piézoélectrique de couplage électromécanique. Comme les relations mécaniques et électriques se vérifient toujours, les relations linéaires pour ces matériaux s’écrivent :
klijklkkijij TsEdS += (27.)
jijjkijki ETdD ε+= (28.) Elles sont fixées par des normes IEEE [standard 88]. Avec les notations d’Einstein, les indices répétés sont sommés. La direction 3 est, par
convention, la direction ayant subi la polarisation initiale. Pratiquement, la souplesse s dépend des conditions électriques appliquées au matériau, de
même, la permittivité ε dépend des conditions mécaniques. On note sE la souplesse mesurée à champ électrique constant et εT la permittivité à contrainte constante.
klE
ijklkkijij TsEdS += (29.)
jT
ijjkijki ETdD ε+= (30.) Pour faciliter la lecture, on peut faire abstraction des indices. En choisissant un autre couple
de variables, on peut écrire : EeScT tE −= (31.) EeSD Sε+= (32.)
Finalement les deux autres possibilités liant une grandeur électrique et une mécanique sont : DhScT tD −= DhSE Sβ+−= (33.) DgTsS tD += DgTE Tβ+−= (34.)
Les existences et valeurs respectives des coefficients de chaque matrice dépendent de la
classe de symétrie cristalline du matériau. Pour les céramiques piézoélectriques, leur classe est celle de la symétrie 6mm, il s’en suit que :
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
0000000000000
333131
15
15
dddd
dd (35.)
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
33
11
11
000000
εε
εε (36.)
Avec le couple de variables choisi initialement, on obtient :
3313132121111 EdTsTsTsS EEE +++= (37.)
3313132112212 EdTsTsTsS EEE +++= (38.)
3333332131313 EdTsTsTsS EEE +++= (39.)

46
2154554 EdTsS E += (40.)
1155555 EdTsS E += (41.)
6666 TsS E= (42.)
1115511 ETdD Tε+= (43.)
2114512 ETdD Tε+= (44.)
3333332131133 ETdTdTdD Tε+++= (45.) Dans la section précédente, nous avons étudié le matériau qui permet une déformation par
piézoélectricité. Ce matériau, afin d’être utilisé par effet inverse doit être mis en forme (au moins avec un dépôt d’électrodes). Les propriétés sont alors celles présentées précédemment et le matériau peut être utilisé suivant l’un des trois modes suivants : longitudinal 33, transversal 31, cisaillement 15. On va donner quelques ordres de grandeur des déformations obtenues.
Si l’on considère des valeurs classiques des coefficients sus mentionnés (d33, d31 et d15 de l’ordre de 10-10 C/N), on obtient pour la déformation libre (sans contrainte appliquée) une valeur de l’ordre de 10-3 (en supposant un champ de 107 V/m). On obtient alors une contrainte maximum (échantillon bloqué mécaniquement) de l’ordre de 108 N/m² en prenant des valeurs de souplesse de 10-11 m²/N. Cet actionneur massif peut bien entendu couvrir toutes les valeurs inférieures à celles calculées si on diminue le champ électrique, c'est-à-dire la tension appliquée.
d33 mode
d31 mode
Figure 53. Illustration des modes 33 et 31 (extrait de notes de cours NOLIAC).
Cependant, le conditionnement du matériau ne s’arrêtera que très rarement à cette étape. En
effet, à moindre effort pour le constructeur, celui-ci peut proposer des produits présentant des caractéristiques bien plus intéressantes. Nous citerons, comme exemples, le revêtement d’une coque étanche, la mise en place d’une précontrainte, le conditionnement sous forme de multicouches, …
C’est majoritairement ces produits finis qui seront utilisés dans les systèmes piézoélectriques finaux. Il semble donc intéressant de connaître le potentiel offert par ces différentes structures. Pour cela, on cherchera dans cette partie à modéliser ces dispositifs.
1) Définition
Les systèmes piézoélectriques complets utilisés pour l’entrainement sont toujours constitués d’une structure mécanique et d’un matériau piézoélectrique inséré de manière à faciliter son utilisation (c’est ce qu’on désigne par dispositif élémentaire). On peut énumérer les multicouches qui peuvent être utilisés sous des tensions raisonnables, les bilames qui présentent des amplitudes de déplacements importantes, les transducteurs de Langevin qui permettent des actionnements à des fréquences élevées.
L’intérêt d’une bonne connaissance de ces éléments de base est multiple. Cela permet de répondre rapidement à une demande particulière, cela fut le cas pour l’asservissement en force de la machine de traction. Cela permet d’envisager toutes les applications possibles de ces matériaux. Cela permet enfin de réduire au strict minimum la structure mécanique accompagnant le dispositif élémentaire lors de la réalisation d’un actionneur.

47
2) Approche Dans le cas d’un échantillon constitué intégralement de matériau piézoélectrique, on peut
utiliser les équations 27 à 34 pour calculer les grandeurs mécaniques (effet inverse) ou électriques (effet direct). En revanche, si l’échantillon contient aussi une partie passive, il faut réussir à coupler les comportements de l’un et de l’autre. C’est ce qu’il faut faire quand on veut modéliser les dispositifs élémentaires. Différentes approches sont possibles.
Analytiques : Il y a en premier lieu les approches purement analytiques. La première s’appuie sur les équations linéaires de la piézoélectricité et sur l’expression
thermodynamique de l’énergie du système [Yang 05], [Yang 06]. La résolution de ces équations nécessite de préciser la forme de l’échantillon, ainsi que ses conditions aux limites.
Prenons, à titre d’exemple, le cas statique d’un barreau piézoélectrique sollicité dans son
mode 33. Sa longueur a (dans la direction 3) est supposée grande devant les dimensions de sa base (a1 et a2).
La variation d’énergie d’un élément de volume vaut : DESTU ∂+∂=∂ (46.)
Ce qui s’écrit dans le cas du matériau piézoélectrique : EETEdETdTTsU TE ∂+∂+∂+∂=∂ ε (47.)
Et en intégrant, on obtient : 22
21
21 EdTETsU TE ε++= (48.)
Chaque terme correspond à une forme d’énergie. UE est l’énergie élastique, UM celle de couplage et UD l’électrique. Le coefficient k est le rapport de l’énergie de couplage sur la racine du produit des énergies élastiques et électrique, il permet de déterminer le rendement η de la conversion.
2
2
1 kk+
=η (49.)
On suppose que notre barreau est libre sur les faces latérales (T1=T2=0) et qu’il est libre de se déformer dans toutes les directions. Le champ électrique est appliqué dans la direction 3 uniquement (E1=E2=0), l’induction électrique est nulle en dehors de la direction 3 (D1=D2=0).
On obtient alors les équations du barreau : 3313131 EdTsS E += (50.)
3313132 EdTsS E += (51.)
3333333 EdTsS E += (52.)
3333333 ETdD Tε+= (53.) On en déduit l’expression de la variation d’énergie :
)()( 33333333333333 ETdEEdTsTU TE ∂+∂+∂+∂=∂ ε (54.) Dont l’intégration donne
2333333333
23 2
121 EETdsTU TE ε++= (55.)
Qui vaut UE +2UM +UD. On en déduit que :
TEs
dk3333
3333
ε= (56.)

48
L’analyse systématique d’un grand nombre de formes et d’assemblages en tant que capteurs
et actionneurs, à basse fréquence ou à la résonnance est donc nécessaire. Cette approche ne peut pas couvrir l’ensemble des possibilités même si elle se défend dans le cas de l’étude d’un nombre fini de dispositifs élémentaires.
Pour mener à bien ces calculs, on utilise des hypothèses simplificatrices dont il convient de vérifier la validité. C’est par exemple ce qui est fait dans le cas de la décomposition des efforts suivant différents modes.
Avec une approche énergétique, il faut aussi tenir compte des répartitions énergétiques dans tout le système, cela peut être compliqué si le système l’est.
Approche par schéma électrique équivalent : Un autre type d’approche analytique consiste à représenter l’actionneur sous forme d’un
schéma électrique équivalent. Les paramètres du schéma peuvent être calculés à partir des données du matériau dans les cas simples, elles peuvent aussi être déterminées par la mesure de l’impédance de l’actionneur.
Reprenons le cas traité précédemment (cas du barreau de longueur a grande devant a1 et a2).
Les faces supérieures A en z=a/2 et inférieures B en z=-a/2 où sont situées les électrodes supportent des contraintes TA et TB. Le déplacement u3 suivant z d’une couche du barreau située à l’altitude z est dû à la superposition de 2 ondes :
tjezBzAu ωαα )cossin( 30303 += (57.) Où α3 est le nombre d’onde. On peut relier A0 et B0 à la vitesse ů de chaque face. Hormis T3, toutes les contraintes sont nulles, de même E et D ne sont non nulles que suivant
la direction 3. Le courant I arrivant sur l’électrode vaut :
)2
(321aDaaj
tDI ω=∂∂
= (58.)
On a alors :
3333333 DhScT D −= (59.)
3333333 DShE Sβ+−= (60.) Après des développements [Brissaud 07], avec Zt impédance mécanique du barreau, on
obtient les forces qui s’appliquent à chaque face.
Ijhu
ajZu
ajZF A
tB
tB ωαα
33
33 )sin()tan(++= && (61.)
Ijhu
ajZu
ajZF B
tA
tA ωαα
33
33 )sin()tan(++= && (62.)
En intégrant le champ électrique sur la longueur du barreau, on obtient la tension à ses bornes.
IaajauuhV
S
AB21
3333 )(
ωβ
−−= (63.)
Ce qui peut s’écrire
ICj
uujhV AB
0
33 1)(ωω
−+= && (64.)
Les équations 61, 62 et 64 permettent de représenter le barreau sous forme du schéma électrique équivalent suivant.

49
Figure 54. Schéma électrique équivalent du barreau en mode 33.
Cette approche permet d’avoir une vision très globale, du dispositif tant d’un point de vue
électrique que d’un point de vue mécanique. Ce type de représentation est très utilisé à haute fréquence et pour l’adaptation d’impédances acoustiques [David 02]. Il a été utilisé dés les premières applications de la piézoélectricité.
Numériques : Il y a ensuite les approches numériques.
La dernière approche que nous citerons est numérique. Il s’agit, par exemple, de la méthode des éléments finis dont un historique est présenté dans [Piefort 01]. Cette méthode consiste à résoudre les équations du système numériquement après avoir discrétisé le domaine d’étude. Le problème traité se ramène alors à une résolution matricielle [Safari 08 chap. 12]. Il est bien sur possible d’intégrer des approximations relatives à la structure afin de simplifier les équations à résoudre.
Approche par éléments finis : Un intérêt de cette approche réside dans le fait qu’elle permet de calculer les déformations des
structures contenant différents matériaux dans des géométries variées. La première étape consiste à choisir les équations mécaniques et électromécaniques des différents matériaux.
Pour le matériau piézoélectrique, on peut alors choisir : EeScT tE −= (65.) EeSD Sε+= (66.)
On écrit ensuite les différentes équations qui régissent les inconnues utilisées, par exemple, la
relation champ électrique-potentiel, la loi de Newton, le théorème de Gauss. Il faut aussi identifier les sources qui peuvent être électriques ou mécaniques.
Il reste alors à écrire le principe variationnel. Cela consiste à assurer la constance d’une
grandeur appelée la fonctionnelle. Pour les structures utilisées en dynamique, il s’agit souvent du Hamiltonien.
0)(2
1
=+∂∫t
t
dtWL (67.)
L est le lagrangien, c’est la différence entre l’énergie cinétique J et l’enthalpie H . W est le travail des forces électriques et mécaniques. Si u est le champ de déplacement, on a :
HJL −= (68.)
- FA FB
uA UB

50
dVuuJV
t &&∫= ρ21 (69.)
dVEDSTH tt
V
)(21
−= ∫ (70.)
∫ +=V
Vt QdVuFW φ (71.)
Où FV représente les forces appliquées, Q les charges sur les électrodes et Φ le potentiel électrique. On peut exprimer l’équation 67 sous la forme suivante :
0)( =∂+∂+∂+∂+∂+∂−∂−∫ QdVuFEEEeSSeESScuu VtTtttEt
V
t
t
φερ && (72.)
En choisissant un mode de représentation des inconnues (ici u ), bien adapté à la forme discrétisée spatialement du problème, on peut écrire cette équation sous forme matricielle. On obtient :
QKuKFKuKuM
iu
iuiuui
=+=++
φφ
φφφ
φ&& (73.)
Où i est l’indice correspondant à chaque nœud du problème discrétisé. Notre approche consiste à utiliser les avantages de chaque modélisation. On pourra, dés
lors utiliser une modélisation analytique, une modélisation par schéma équivalents ou une modélisation numérique (codes commerciaux ou codes développés en interne) en fonction du besoin. Un des besoins est la validation des hypothèses, on sera alors parfois amenés à comparer les résultats obtenus par deux méthodes ne faisant pas les mêmes hypothèses quand le juge de paix qu’est la mesure n’est pas disponible.
Ces activités sont à la frontière entre les équipes ICHAMS (Interaction CHAmps Matériaux
Structure) et COCODI (COnception, COmmande et DIagnostic) du LGEP.
1.3.1. Introduction
1) Définition Précédemment, nous avons évoqué les différents modes d’utilisation des actionneurs
massifs. La section suivante 2.4, abordera les systèmes piézoélectriques et les piézomoteurs en particulier. Il existe un niveau intermédiaire passant par une conversion mécanique-mécanique simple et intégrée à l’actionneur piézoélectrique. C’est ce que nous appelons les dispositifs élémentaires. Leur connaissance est une étape obligatoire en vue de la réalisation de systèmes complets utilisant la technique d’actionnement la mieux ciblée à l’application.
2) Ordres de grandeur Nous reviendrons, par la suite, sur certains de ces dispositifs élémentaires. Cependant, nous
allons d’abord en faire une brève description afin de donner les ordres de grandeurs de leurs performances.
Bilames : Les bilames sont des dispositifs dans lesquels un matériau piézoélectrique de forme plate est
collé à une structure (métallique ou autre matériau piézoélectrique) de manière à ce que l’ensemble de la structure soit sollicité en flexion.

51
Poling FieldSignal Field
Direction of Strain
+V
+V
-V
Signal Field
Direction of Strain
+V
-V
-V
Poling Field
Single Side Voltage Control
Figure 55. Exemple de bilame (extrait de notes de cours NOLIAC).
Multicouches : Les multi couches sont des échantillons piézoélectriques dans lesquels sont intercalées des
électrodes. Chaque couche de matériau est ainsi alimentée électriquement en parallèle avec les autres mais est couplée mécaniquement en série. Cela permet d’obtenir un champ électrique élevé dans le matériau sans avoir recours à des tensions trop importantes.
PZT ceramic Layer Passive ceramic Layer
External electrode
Buried internal electrode
d31 mode
d33 mode
Figure 56. Exemple de multicouche (extrait de notes de cours NOLIAC).
Flextensionnels : Les flextensionnels sont des dispositifs dans lesquels un élément piézoélectrique (massif ou
multicouche) est entouré d’une structure fermée déformable dont la silhouette (par exemple sphérique) amplifie le mouvement du piézoélectrique.
Figure 57. Exemple de Flextensionnel (extrait de notes de cours NOLIAC)
Actionneurs à levier : Les actionneurs à levier sont des flextensionnels dans lesquels la structure externe n’est pas
fermée.

52
PZT Stack
Hinge
Figure 58. Exemple d’actionneur à levier (extrait de notes de cours NOLIAC).
Tous ces dispositifs permettent d’amplifier la déformation, à niveau de tension constant,
afin d’obtenir des courses plus grandes que celles du matériau seul. Il en résulte qu’une plus grande partie du plan contrainte/déformation est accessible avec
des solutions piézoélectriques comme on le constate sur la Figure 59.
Figure 59. Performances des dispositifs élémentaires (extrait de [safari 08 chap. 12])
Pour certains de ces dispositifs, les notions de déformation et de contrainte sont un peu
ambigües, on montre sur la Figure 60, le diagramme force, déplacement qui a plus de sens et s’utilise plus facilement pour le dimensionnement de structures.

53
Figure 60. Performances des dispositifs élémentaires (extrait de www.piezoproducts.com) La dernière catégorie de dispositifs élémentaires à mentionner est constituée des dispositifs
résonnants. Transducteurs de Langevin : Les transducteurs de Langevin sont des dispositifs dans lesquels le matériau piézoélectrique
est contraint entre deux masses. On dimensionne l’ensemble en faisant en sorte d’orienter le déplacement vers une des extrémités de l’actionneur.
Buzzers : Enfin, les buzzers sont constitués d’une membrane piézoélectrique circulaire ceinturée par
un anneau non déformable. Pour se déformer, la membrane se bombe.
1.3.2. Multicouches
1) Définition Les multicouches sont les éléments de base des actionneurs piézoélectriques fonctionnant à
basse fréquence et dont le matériau est sollicité en mode axial (d33). Un multicouche est constitué de fines lamelles de matériau piézoélectrique séparées par des électrodes métalliques connectées entre elles de manière à créer un champ électrique dans chaque lamelle de matériau actif.
Ces dispositifs ne doivent absolument pas être soumis à de la traction. D’abord parce que
comme toutes les céramiques, le matériau les constituant y est particulièrement sensible, ensuite parce que, dans les multicouches, il y a un risque de séparer les couches.
C’est une des raisons pour lesquelles, ces dispositifs élémentaires ne doivent pas être utilisés
à la résonnance. Une autre raison, pratique, réside dans la valeur de leur capacité équivalente. La surface active des électrodes est grande (environ n fois celle d’un échantillon massif de mêmes dimensions si n est le nombre de couches) et l’épaisseur des couches est petite (n fois plus petite que pour l’échantillon massif de mêmes dimensions). La capacité d’un multicouche de n couches

54
est donc celle de l’échantillon massif de mêmes dimensions multipliée par n². Le courant nécessaire pour charger ce condensateur (pour créer le champ) devient donc rapidement très élevé.
A basse fréquence, en revanche, la tension à fournir pour obtenir un champ électrique donné
est n fois inférieure à celle de l’échantillon massif de mêmes dimensions. C’est la raison pour laquelle ces matériaux sont très utilisés pour les applications quasi-statiques.
2) Approche Afin de s’assurer de ne pas s’approcher de la résonnance dans nos applications des
multicouches, nous avons caractérisé expérimentalement le ML-02-09-C5 de chez Noliac. C’est un multicouche de forme carrée (5x5 mm). L’épaisseur de cet échantillon (2 mm) est constituée d’une alternance de couches piézoélectriques (PZT matériau S2) et d’électrodes (Pt). Ce composant est un élément de base pour cette entreprise. La fabrication d’autres multicouches se fait souvent par assemblages de ces éléments. Il a la particularité de fonctionner sous une tension nominale de 60 V, de générer sous cette tension une force bloquée de 1500 N ou un déplacement libre de 2,4 μm.
Nous en avons fait une simulation par éléments finis (codes commerciaux) afin de comprendre à quels modes correspondaient les fréquences de résonnance observées. Puis nous avons modélisé son fonctionnement par un schéma électrique équivalent [CN.7].
Le protocole permettant une connaissance satisfaisante de ce type d’éléments a été établi, en cas de besoin, nous pourrons l’appliquer à d’autres échantillons.
3) Apports Modélisation par schéma électrique équivalent et par éléments finis : Afin de pouvoir mettre en place une modélisation par le schéma de Mason [Brissaud 07
chap.6], nous avons fait une caractérisation du comportement électrique de l’échantillon par mesure de son admittance en fonction de la fréquence. Les conditions mécaniques de l’échantillon lors de la mesure sont libres aux extrémités.
Figure 61. Mesure d’admittance d’un multicouche.
Les mesures effectuées à l’aide d’un impédancemètre HP4191A (Figure 61) laissent bien apparaître le comportement attendu à basse fréquence. On identifie R0=21 kΩ et C0=1,38 μF (cette dernière valeur est conforme aux données constructeur : 1415 nF. On confirme que les 77 électrodes conduisent à une valeur de capacité élevée.
On observe aussi que la première fréquence de résonnance se situe autour de 250 kHz. Lorsque l’on s’approche de cette première résonance mécanique, on s’aperçoit que plusieurs
modes sont proches les uns des autres et qu’il n’est pas possible de clairement dissocier la première résonance de la suivante. De ce fait, si l’on cherche à modéliser globalement l’admittance de l’échantillon, la méthode classique de détermination des paramètres se trouve en défaut : d’abord parce qu’on ne peut pas trouver la fréquence de résonance, ensuite parce que le coefficient de

55
surtension englobe plusieurs résonances. Une méthode d’optimisation (moindres carrés) sur des points choisis de part et d’autre de la résonance sera alors à privilégier.
Figure 62. Zoom de l’admittance du ML-02-09-C5 autour de la première résonance.
En utilisant une seule branche motionnelle (Figure 63) pour modéliser le comportement
mécanique, on peut refléter le comportement électrique global de l’actionneur (Figure 64).
Figure 63. Schéma de Mason simplifié.
Figure 64. Comparaison des admittances mesurée (trait fin) et modélisée (trait épais) du
multicouche avec une branche motionnelle. Si on utilise un schéma de Mason comportant une deuxième branche motionnelle, on choisit
lors de l’identification des paramètres de distinguer les deux premiers modes de résonnance simulé ensemble du troisième. Les résultats sont présentés sur la Figure 65.
Ff F
u Fr
Fi
M
k
f R0 C0 Ve
N

56
Figure 65. Comparaison des admittances mesurée (trait fin) et modélisée (trait épais) du
multicouche avec deux branches motionnelles. On pourra bien sur augmenter le nombre de branches motionnelles à chaque fois que l’on
cherchera à modéliser une résonance. Cependant, le schéma pourra être le plus précis possible, il ne donnera jamais que le comportement quantitatif dynamique de l’échantillon autour de sa résonance, sans préciser de quelle résonance il s’agit. Pour avoir plus d’informations sur ces résonances, nous avons effectué une modélisation de cet échantillon par éléments finis.
L’étude par éléments finis a pour but d’identifier les modes de vibration qui ont été sollicités
lors de la mesure d’admittance. Le calcul effectué est un calcul découplé, l’effet piézoélectrique n’est pas pris en compte. Les caractéristiques élastiques du PZT sont fournies par le constructeur, celles du platine ont été obtenues par ailleurs. En raison des symétries du problème, seul 1/8 de l’élément est modélisé. Le calcul fait apparaître, conformément à ce qui était observé expérimentalement deux premières fréquences de résonance assez proches, au voisinage de 250 kHz.
Un troisième mode, un peu avant 300 kHz est également mis en évidence. Il correspond approximativement à la troisième résonance observée lors de la mesure d’admittance. Les résultats obtenus pour les valeurs des fréquences propres sont assez sensibles aux dimensions de l’échantillon. L’incertitude annoncée par le constructeur sur ces dimensions (0,2 mm pour une largeur de 5 mm) pourrait expliquer la dispersion assez importante obtenue sur les mesures d’admittance pour les différents échantillons testés. Des mesures d’admittance ont également été effectuées en imposant un déplacement orthogonal à la surface supérieure de l’échantillon (qui était libre précédemment), cette sollicitation a eu pour conséquence de diminuer l’amplitude de l’admittance et de faire disparaître le double pic à 250 kHz. La modélisation par élément finis montre quant à elle que l’application d’une telle sollicitation tend à écarter les deux premiers modes de résonance, dissipant cet effet de double pic en les écartant l’un de l’autre.
Utilisation en tant que capteur : Nous avons testé la possibilité d’utiliser ce composant en tant que capteur de force. Ses
faibles dimensions en font en effet un dispositif facile à intégrer dans une structure. Ces travaux étant légèrement décalés par rapport à l’objectif de ce mémoire, nous renverrons à la référence [Th.2].
Prenons le cas d’un barreau de longueur a et de section l1*l2. La face supérieure A en z=a subit une pression PA. Les conditions aux limites s’écrivent :
021 == TT APT −=3 (74.) 0)0(3 =u 0654 === SSS (75.)
33113111 )()0( EdPslSS AE +−== (76.)
33113222 )()0( EdPslSS AE +−== (77.)
3333311 )()0( EdPsaSS AE +−== (78.)

57
D’un point de vu électrique :
021 == DD (79.)
333333 )( EPdaD TA ε+−= (80.)
Le courant I vaut :
213 )(
lljIaDω
= (81.)
On en déduit que :
aVPd
lljIE ATT =+=
33
33
33213 εεω
(82.)
Le schéma équivalent est donc le suivant :
Remarque sur l’homogénéisation : Une particularité de ce type de matériaux, qui a été légèrement abordée lors de la description
de la modélisation par éléments finis, réside dans leur inhomogénéité. Un rapide calcul permet de s’apercevoir que les constantes élastiques du matériau actif ne sont pas celles qu’il faut utiliser pour l’échantillon. Le ML-02-09-C5 a des électrodes en platine de 2 à 3 µm d’épaisseur alors que les couches de PZT font 20 µm d’épaisseur. Les modules d’Young sont dans un rapport 3, environ. Il faut donc envisager des techniques d’homogénéisation pour les modéliser convenablement.
1.3.3. Bilames
1) Propriétés Les bilames sont des dispositifs qui peuvent être utilisés directement et génèrent des
déplacements importants (relativement à ceux du matériau piézoélectrique seul). D’un autre point de vue, leur constitution les rend proches de toute plaque métallique sur
laquelle est déposée une couche piézoélectrique. De ce fait, une bonne connaissance de ces composants permet d’étudier de nombreuses structures.
Une autre particularité de ces structures est de présenter des fréquences de résonnance basses
(comparativement à celles du matériau piézoélectrique seul). Elles sont donc parfois utilisées autour de leur premier mode de résonnance.
2) Approches et apports Nous avons été amenés à modéliser ces structures pour plusieurs raisons.
V0
C0 V
I
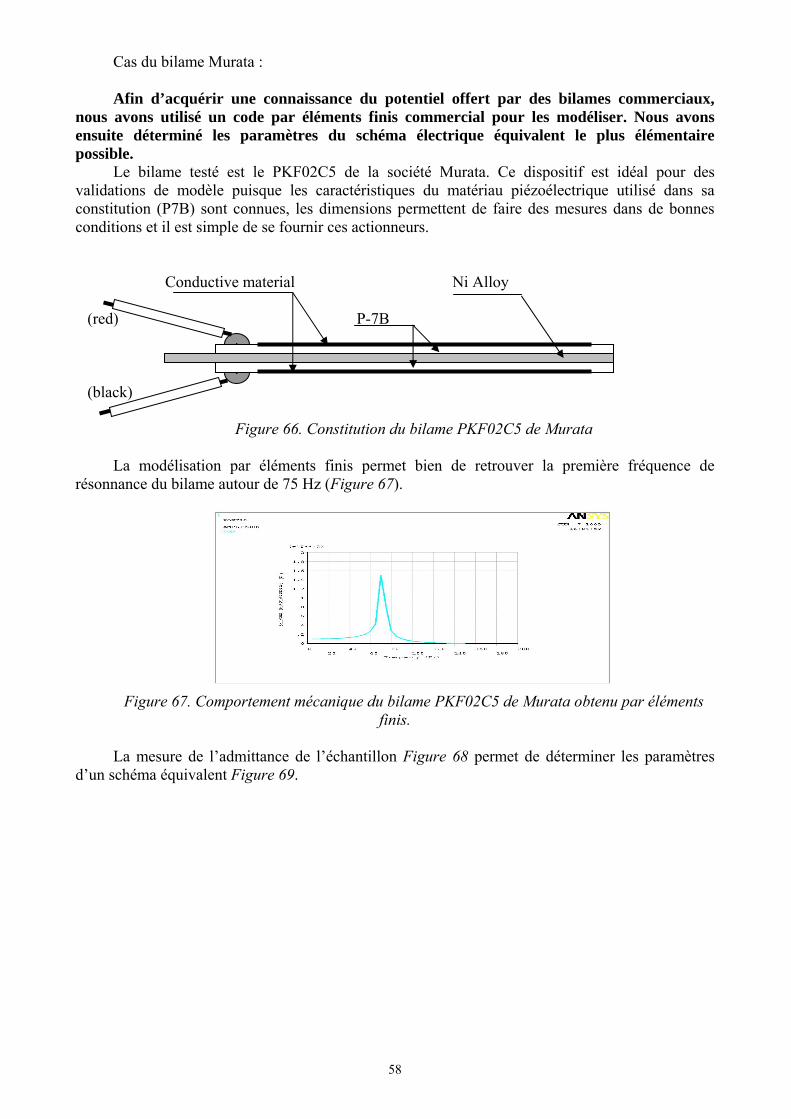
58
Cas du bilame Murata : Afin d’acquérir une connaissance du potentiel offert par des bilames commerciaux,
nous avons utilisé un code par éléments finis commercial pour les modéliser. Nous avons ensuite déterminé les paramètres du schéma électrique équivalent le plus élémentaire possible.
Le bilame testé est le PKF02C5 de la société Murata. Ce dispositif est idéal pour des validations de modèle puisque les caractéristiques du matériau piézoélectrique utilisé dans sa constitution (P7B) sont connues, les dimensions permettent de faire des mesures dans de bonnes conditions et il est simple de se fournir ces actionneurs.
Conductive material Ni Alloy (red) P-7B
(black)
Figure 66. Constitution du bilame PKF02C5 de Murata
La modélisation par éléments finis permet bien de retrouver la première fréquence de résonnance du bilame autour de 75 Hz (Figure 67).
Figure 67. Comportement mécanique du bilame PKF02C5 de Murata obtenu par éléments
finis. La mesure de l’admittance de l’échantillon Figure 68 permet de déterminer les paramètres
d’un schéma équivalent Figure 69.

59
Figure 68. Admittance mesurée du bilame PKF02C5 de Murata.
Figure 69. Schéma électrique équivalent du bilame PKF02C5 de Murata.
On peut dans un premier temps, valider la restitution du comportement électrique du bilame
en comparant les admittances du schéma équivalent et celle mesurée, cela permet de vérifier que les paramètres du schéma électrique sont corrects.
Sur la Figure 70, on représente, autour de la résonnance, la mesure d’admittance en trait plein
et le résultat du modèle en pointillé.
Figure 70. Comparaison des admittances mesurée et modélisée du bilame.
On s’aperçoit que le modèle par schéma électrique équivalent rend convenablement compte
de l’admittance. On peut alors utiliser le code éléments finis et le schéma électrique équivalent pour déterminer le comportement mécanique dynamique du bilame. On compare les méthodes à la mesure (en vert) sur la Figure 71 (éléments finis en rouge et schéma électrique en bleu).
Ff F
u Fr
Fi
M
k
f R0 C0 Ve
N
Admittance (S)
Fréquence (Hz)
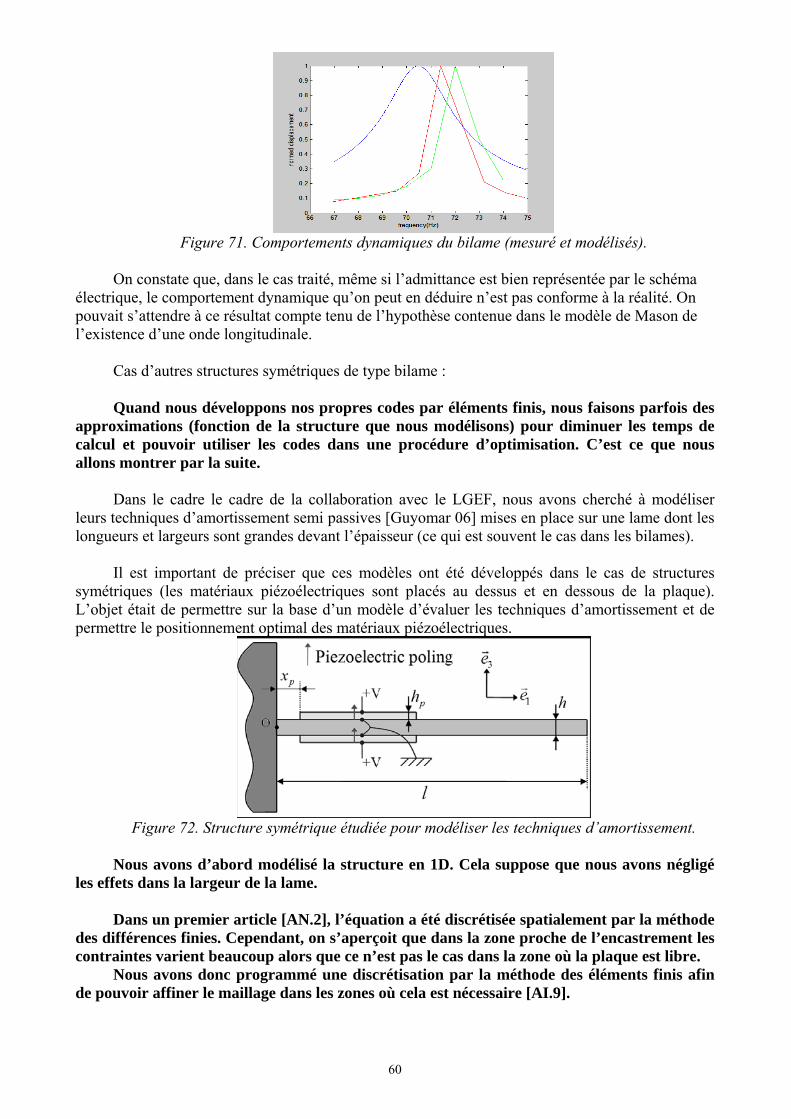
60
Figure 71. Comportements dynamiques du bilame (mesuré et modélisés).
On constate que, dans le cas traité, même si l’admittance est bien représentée par le schéma
électrique, le comportement dynamique qu’on peut en déduire n’est pas conforme à la réalité. On pouvait s’attendre à ce résultat compte tenu de l’hypothèse contenue dans le modèle de Mason de l’existence d’une onde longitudinale.
Cas d’autres structures symétriques de type bilame : Quand nous développons nos propres codes par éléments finis, nous faisons parfois des
approximations (fonction de la structure que nous modélisons) pour diminuer les temps de calcul et pouvoir utiliser les codes dans une procédure d’optimisation. C’est ce que nous allons montrer par la suite.
Dans le cadre le cadre de la collaboration avec le LGEF, nous avons cherché à modéliser
leurs techniques d’amortissement semi passives [Guyomar 06] mises en place sur une lame dont les longueurs et largeurs sont grandes devant l’épaisseur (ce qui est souvent le cas dans les bilames).
Il est important de préciser que ces modèles ont été développés dans le cas de structures
symétriques (les matériaux piézoélectriques sont placés au dessus et en dessous de la plaque). L’objet était de permettre sur la base d’un modèle d’évaluer les techniques d’amortissement et de permettre le positionnement optimal des matériaux piézoélectriques.
Figure 72. Structure symétrique étudiée pour modéliser les techniques d’amortissement.
Nous avons d’abord modélisé la structure en 1D. Cela suppose que nous avons négligé
les effets dans la largeur de la lame. Dans un premier article [AN.2], l’équation a été discrétisée spatialement par la méthode
des différences finies. Cependant, on s’aperçoit que dans la zone proche de l’encastrement les contraintes varient beaucoup alors que ce n’est pas le cas dans la zone où la plaque est libre.
Nous avons donc programmé une discrétisation par la méthode des éléments finis afin de pouvoir affiner le maillage dans les zones où cela est nécessaire [AI.9].

61
Enfin, afin de prendre en compte le fait que le matériau piézoélectrique n’occupe pas toute la largeur de la lame, nous avons mis en place une extension à 2 dimensions du modèle par éléments finis [AI.10].
Cas des structures non symétriques : Pour pouvoir traiter le cas de structures non symétriques, nous travaillons actuellement
à la réalisation d’un modèle permettant de s’affranchir de l’hypothèse de symétrie [Fernandes 02] et tenant intrinsèquement compte d’hypothèses simplificatrices liées à la structure.
3) Conclusion D’un point de vue de l’utilisation directe des bilames, nous avons développé une
caractérisation/modélisation à trois niveaux : expérimentale, par schéma électrique équivalent et par éléments finis (en utilisant des codes du commerce) [CI.8]. On a mis en évidence que même si le schéma simplifié de Mason permet de refléter le comportement électrique du bilame, il ne peut pas être utilisé d’un point de vue mécanique.
Du point de vue du bilame comme un matériau piézoélectrique déposé sur une structure métallique, une modélisation par éléments finis plus avancée a été réalisée. Elle permet en effet de tenir compte des équations du circuit électrique sur lequel sont connectées les électrodes du matériau piézoélectrique même si le circuit est fortement non linéaire [AI.9], [AI.10], [AN.2].
Les perspectives de ces travaux s’inscrivent dans l’exploitation de ces modèles. De manière
général cela passe par la possibilité de générer une onde mécanique dans une structure métallique. Cette onde peut être utilisée pour du diagnostic (contrôle), pour de l’actionnement direct (entrainement) ou pour créer une deuxième onde dans le milieu environnant (traitement par ultrasons).
1.3.4. Langevins
1) Définition Les actionneurs de Langevin, constitués d’un matériau piézoélectrique entouré de deux
masses métalliques, sont les composants élémentaires de nombreux dispositifs fonctionnant à des fréquences ultrasoniques. L’intérêt d’utiliser ces fréquences repose sur le facteur de qualité Q qui permet d’obtenir des déformations Q fois plus grandes à la résonance mécanique des structures qu’à basse fréquence.
Ces dispositifs élémentaires sont, bien sûr, utilisés dans la génération d’ondes ultrasoniques
[David 02]. Ils ont été abondamment étudiés et modélisés dans la littérature [Aurelle 96], [Gonnard 02].
2) Approche Nous nous sommes intéressés à ces dispositifs élémentaires dans le cadre de la
réalisation d’un actionneur à onde progressive [CN.12]. Encore une fois, c’est un modèle par schéma électrique équivalent qui a été choisi. Cependant dans cette modélisation, ce n’est plus seulement le matériau piézoélectrique qui est déterminant mais son environnement intervient largement par le biais des impédances acoustiques. Une comparaison entre le schéma simplifié de Mason et le schéma complet a été effectuée dans [th.4].

62
Nous avons développé des techniques d’obtention d’un dimensionnement optimal de ces actionneurs en vue de remplir un cahier des charges (fréquence d’utilisation, amplitude de déplacement). Cela passe par un choix judicieux du matériau qui est rendu possible par la connaissance des matériaux.
3) Apports L’élément sur lequel nous avons mené nos investigations, fabriqué par l’entreprise Sunnytech
et portant la référence STC 8HS-3528, est commercialisé pour des applications de nettoyage par ultrasons. Encore une fois, les données techniques de ce dispositif élémentaire sont connues. Il est composé d’une masse d’une masse de tête en acier et d’une masse de queue en aluminium cf.Figure 73. Sa première fréquence de résonnance est à 28 kHz.
Figure 73. Photo du STC 8HS-3528.
La première approche a consisté à valider le schéma de Mason simplifié. Les paramètres
peuvent être mesurés ou déterminés à partir des grandeurs géométriques et physiques du transducteur [CN.14].
Figure 74. Comparaison des admittances mesurée (en rouge) et modélisée (en bleu) du
Langevin avec le schéma simplifié de Mason. Des mesures de déplacements ont été effectuées sur le transducteur à l'aide d'un vibromètre
laser. Les résultats sont montrés dans la Figure 75 sur une échelle logarithmique.

63
Figure 75. Comportement dynamique du Langevin (mesuré et modélisé).
On observe que contrairement à ce que l’on avait pu constater dans le cas du bilame, la
restitution par le schéma de Mason simplifié du comportement mécanique peut être relativement exacte, particulièrement autour de la résonance.
Cependant ce modèle simplifié se révèle parfois insuffisant. Le modèle complet de Mason
permet de tenir compte de la composition réelle du transducteur et des conditions aux limites mécaniques de ses deux faces. Chaque partie composant le dispositif élémentaire est alors représentée par un circuit électrique équivalent. Celui de chaque céramique est indiqué en Figure 76.
Figure 76. Schéma de Mason complet d’une céramique.
Pour représenter le transducteur de Langevin en entier, on obtient le schéma de la Figure 77.
Cette approche a été validée dans [th.4].
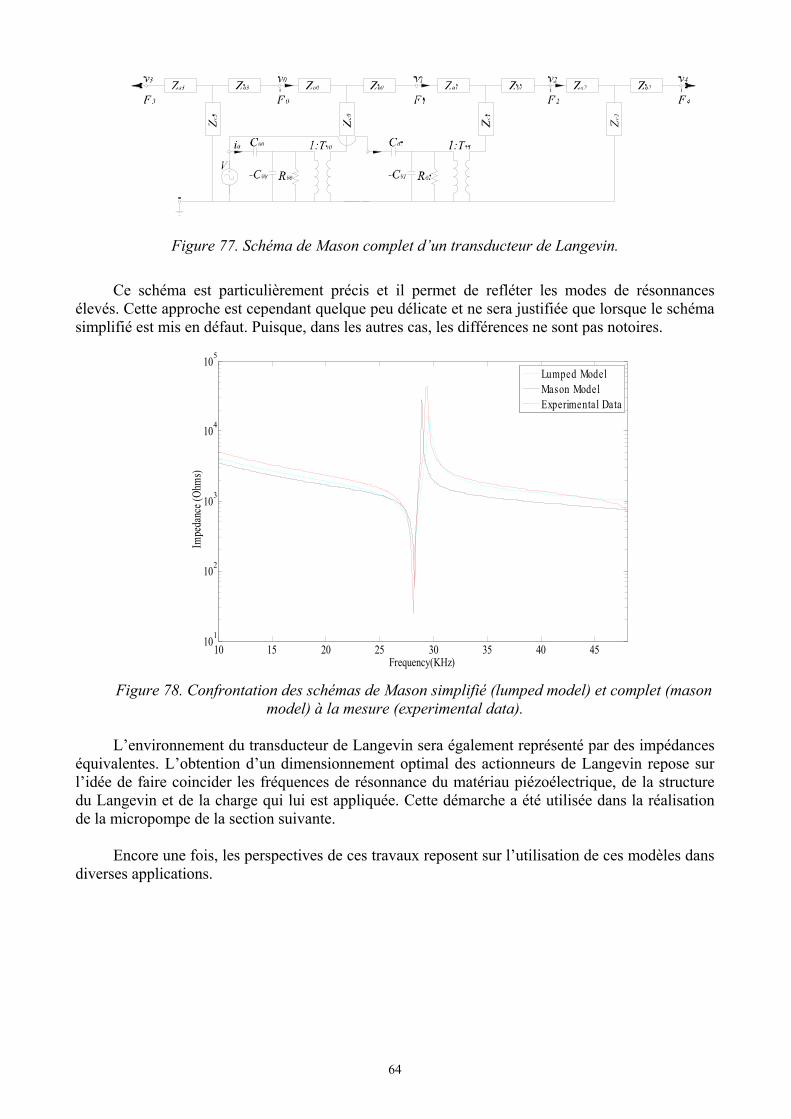
64
Figure 77. Schéma de Mason complet d’un transducteur de Langevin.
Ce schéma est particulièrement précis et il permet de refléter les modes de résonnances
élevés. Cette approche est cependant quelque peu délicate et ne sera justifiée que lorsque le schéma simplifié est mis en défaut. Puisque, dans les autres cas, les différences ne sont pas notoires.
10 15 20 25 30 35 40 45101
102
103
104
105
Frequency(KHz)
Impe
danc
e (Oh
ms)
Lumped ModelMason ModelExperimental Data
Figure 78. Confrontation des schémas de Mason simplifié (lumped model) et complet (mason
model) à la mesure (experimental data). L’environnement du transducteur de Langevin sera également représenté par des impédances
équivalentes. L’obtention d’un dimensionnement optimal des actionneurs de Langevin repose sur l’idée de faire coincider les fréquences de résonnance du matériau piézoélectrique, de la structure du Langevin et de la charge qui lui est appliquée. Cette démarche a été utilisée dans la réalisation de la micropompe de la section suivante.
Encore une fois, les perspectives de ces travaux reposent sur l’utilisation de ces modèles dans
diverses applications.

65
1.3.5. Buzzers
1) Définition Les buzzers sont des dispositifs élémentaires dont le nom traduit la fonction. Leur rôle est en
effet d’émettre un « buz ». Ce sont donc des structures à vocation dynamique. Elles sont constituées d’un disque piézoélectrique entouré d’une structure plastique empêchant le disque de se dilater radialement. Celui-ci pour se dilater doit donc se bomber. L’oscillation entre les positions haute et basse crée une onde de pression. Les fréquences utilisées sont dans le domaine audible.
2) Approche Ce dispositif élémentaire a été utilisé dans un but pédagogique [CN.11]. Le premier avantage
est son coût. C’est un produit très répandu dans les composants électroniques, il est donc très bon marché. Nous avons pu illustrer de nombreux concepts grâce à ce composant.
L’échantillon utilisé comme démonstrateur est un buzzer de la société Murata commercialisé
sous la dénomination Ceramitone®. Il se trouve facilement et son coût est inférieur à 5 euros. Il est constitué d’une armature en résine qui contient une pastille de céramique piézoélectrique utilisée en flexion.
Figure 79. Photo du Ceramitone.
Ce composant a été modélisé dans ses caractéristiques d’effet inverse en statique et en
dynamique par schéma électrique équivalent. Cela permet d’illustrer les analogies électrique/mécanique auprès des étudiants.
Il a aussi été modélisé en effet direct. Cela permet de mettre en œuvre les autres équations de la piézoélectricité.
3) Apports Un petit démonstrateur de récupération d’énergie a été réalisé [CN.11].
1.3.6. Perspectives
Les perspectives concernant les dispositifs élémentaires répondent à deux besoins : la création
d’une base de données des performances que l’on peut attendre de ces dispositifs, ainsi qu’une modélisation suivant différents niveaux de complexité en fonction du besoin quand on intègre ces dispositifs dans des systèmes complets.

66
En ce qui concerne la création d’une base de donnée, il faut tout d’abord la compléter avec
d’autres structures et notamment les dispositifs flextensionnels qui sont très utilisés [Vaughan 01], [Vloebergh 10]. L’expertise sur ces dispositifs se trouve notamment chez Cedrat et à l’Onera en France. Il faut aussi compléter les données concernant les dispositifs étudiés pour réellement mettre en avant leurs performances en fonction de leurs dimensions. Pour cela, il faudra s’appuyer sur les différentes modélisations que nous avons utilisées jusqu’à maintenant mais aussi en développer de nouvelles comme des modélisations purement analytiques en s’appuyant sur les travaux de l’université du Nebraska-Lincoln. On pourra aussi faire appel à des lois d’homogénéisation, on a montré que dans le cas des multicouches, les caractéristiques mécaniques du dispositif étaient influencées de manière non négligeable par la présence des électrodes.
En ce qui concerne la modélisation à différents niveaux de complexité, il faudra s’appuyer sur
les travaux menés en modélisation des lois de comportement pour être au plus près du comportement réel du matériau. Cette partie a été abordée dans la section précédente. On pourrait alors intégrer ces lois de comportement dans la modélisation numérique des dispositifs. Ce qui compléterait les approches numériques existantes et permettrait une meilleure estimation des pertes. Il faudra aussi développer des modèles de type schéma électrique équivalent pour les bilames car cette approche est utile pour les adaptations d’impédances acoustiques (Institut de recherche en physique Kobayashi). Enfin, des modèles analytiques sont utiles lorsqu’il s’agit d’optimiser une structure [Monturet 02]. Car une des perspectives reste l’utilisation de ces dispositifs élémentaires dans des structures complètes.
1.3.7. Références
[standard 88] IEEE standard on piezoelectricity, ANSI/IEEE Standard 176, 1987. [Yang 05] J. YANG, Analysis of piezoelectric devices, World Scientific, 2005. [Yang 06] J. YANG, The Mechanics of piezoelectric Structures, World Scientific, 2006. [Brissaud 07] M. BRISSAUD, Matériaux piézoelectriques Caractérisation, modélisation et
vibration, Collection des sciences appliquées de l’INSA de Lyon, 2007. [David 02] J. DAVID, N. CHEEKE, Fundamentals and applications of ultrasonic
waves, CRC Press, 2002. [Piefort 01] V. PIEFORT, Finite element modelling of piezoelectric active structures,
Thèse de doctorat de l’Université Libre de Bruxelles, soutenue en 2001. [Safari 08] A. SAFARI, E. KORAY AKDOGAN, Piezoelectric and acoustic materials
for transducer applications, Springer, 2008. [Guyomar 06] D. GUYOMAR, A. BADEL, Nonlinear semi-passive multi-modal vibration
damping : An efficient probabilistic approach, Journal of sound and vibration, Volume 294, Issue 1-2, p. 249-268, June 2006.
[Fernandes 02] A. FERNANDES, J. POUGET, An accurate modelling of piezoelectric
multi-layer plates, European journal of mechanics A, Vol. 21, pp. 629-651, 2002.

67
[Aurelle 96] N. AURELLE, Non linéarités dans les céramiques piézoélectriques avec application aux transducteurs acoustiques de puissance, Thèse de l’INSA de Lyon, 1996.
[Gonnard 02] P. GONNARD, Transducteurs ultrasonores, Notes de cours INSA Lyon,
edition 2002-2004. [Vaughan 01] M. E. VAUGHAN, The design, fabrication and modelling of a piezoelectric
linear motor, Master of science, Faculty of the Virginia polytechnic institute, Blacksburg, 2001.
[Vloebergh 10] C. VLOEBERGH, Modélisation et optimisation d’actionneurs
piézoélectriques linéaires à onde progressive, Thèse de l’université catholique de Louvain, 2010.
[Monturet 02] V. MONTURET, B. NOGAREDE, Optimal dimensioning of a piezoelectric
bimorph actuator, Eur. Phys. J. AP, Vol. 17, pp. 107-118, 2002.

68
1.4. Conception de systèmes piézoélectriques L’aboutissement de ce qui a été présenté précédemment est, bien entendu, la réalisation de
systèmes remplissant des fonctions définies par un cahier des charges. Ce sont alors différentes étapes, faisant appel à des compétences spécifiques qui se succèdent : pré-étude (étude de faisabilité d’une solution), modélisation de la solution retenue et validation du modèle sur un prototype, utilisation du modèle obtenu afin de faire évoluer le prototype vers une solution que l’on veut optimale.
La difficulté de ce processus complet réside dans sa pluridisciplinarité en intégrant, par exemple, la réalisation des alimentations de ces systèmes d’entrainement piézoélectrique.
Nous avons appliqué cette démarche à la réalisation d’un entraineur piézoélectrique linéaire
qui en cumulant des pas élémentaires qui peuvent être infimes permet une course macroscopique. Nous avons aussi réalisé un système de pompage de fluide permettant des débits
micrométriques et dont la structure peut être réalisée dans des dimensions sub centimétriques. De manière plus anecdotique, nous avons testé une structure d’entraineur Stick Slip (le
principe sera présenté par la suite). Enfin, une thèse est en cours sur la réalisation des mobiles piézoélectriques. Dans chacun de ces travaux, au delà de la conversion électromécanique effectuée par le
matériau piézoélectrique, une conversion mécanique-mécanique est effectuée de manière à rendre exploitable le mouvement. Une bonne connaissance des techniques de conversion est nécessaire pour proposer des solutions adaptées. Nous en ferons une description en introduction.
Je précise que pour la plupart des structures listées par la suite, les méthodes de calcul du
champ électrique appliqué au matériau sont très simples, on a remarqué dans [AI.4] que le champ électrique de fuite n’a pas une influence majeure sur le comportement mécanique des structures.
1.4.1. Introduction
Dans la première partie, nous avons étudié la déformation des matériaux piézoélectriques
soumis à un champ électrique. Cette déformation est due à leur structure cristalline. Dans la deuxième partie, nous avons listé des dispositifs élémentaires permettant d’exploiter
convenablement l’effet inverse de la propriété de piézoélectricité. Ces dispositifs permettent de réaliser un actionnement.
Notre préoccupation dans cette dernière partie du manuscrit est de créer un mouvement de corps rigide sur un objet mobile.
On observe que les dispositifs élémentaires, utilisés sans autre forme de conversion d’énergie
que celle qu’ils mettent en jeu intrinsèquement ne peuvent mouvoir l’objet mobile que dans la limite de leur propre déplacement. Si on accepte que le dispositif élémentaire ayant la course la plus importante est le bilame, et que celle-ci dépasse rarement le centimètre, on se rend bien compte de la nécessité d’avoir recours à une autre conversion d’énergie pour augmenter la course de l’objet mobile.
Cette nouvelle conversion d’énergie est mécanique-mécanique, elle utilise l’actionnement du matériau piézoélectrique pour entrainer le mouvement de corps d’un objet mobile.

69
Avant de faire un inventaire des techniques d’entrainement que nous avons mises en œuvre, nous allons faire une revue de certaines de ces techniques. Les systèmes piézoélectriques obtenus après ces conversions sont parfois appelés piézomoteurs.
1) Revue des techniques d’entrainement Pour obtenir un mouvement de corps rigide, la déformation alternative des dispositifs
élémentaires doit être convertie en mouvement uniforme. Les faibles amplitudes de ces déformations ne permettent pas l’utilisation des systèmes mécaniques classiques (ceux utilisés dans les moteurs conventionnels).
Dans la suite de cette partie, on appellera stator la partie du système qui contient le ou les matériaux actifs et rotor l’objet animé d’un mouvement de corps rigide.
Dans le cas des moteurs piézoélectriques, la conversion mécanique-mécanique peut prendre
plusieurs aspects. Il est difficile d’en structurer l’inventaire, et de nombreuses techniques ont été employées.
Il n’est pas pertinent de distinguer les entrainements linéaires des entraînements rotatifs
puisque certaines techniques s’appliquent aussi bien aux uns qu’aux autres. Certains auteurs [Rouchon 05] proposent de faire une distinction indiquant si la structure est sollicitée suivant un (ou plusieurs) mode(s) de résonnance ou pas. Cependant, certaines techniques d’actionnement peuvent fonctionner à la résonnance ou en dehors. D’autres auteurs [Spanner 10] classifient les stratégies selon trois principes mais l’appartenance de certaines stratégies à l’un ou l’autre des principes me parait discutable. Une autre classification repose sur la nature du mouvement rigide (continu ou intermittent) [Hemsel 00]. Cependant, cette classification simple ne permet pas de distinguer un grand nombre de cas. Enfin [Uhea 93] propose plusieurs techniques de classification. Deux manières sont originales : selon la forme du stator dans un premier temps et suivant la possibilité de déplacer le « stator » sur un substrat dans un deuxième temps. Cette approche présente un intérêt pour des utilisateurs potentiels.
Je choisis de distinguer les techniques d’actionnement en fonction de la trajectoire du point
du stator qui à un instant donné a transmis du mouvement au rotor (on l’appelle par la suite point d’entrainement). L’inventaire de ces trajectoires a été effectué dans [Nogarede 96]. Cette classification permet d’établir des généralités sur les performances des piézomoteurs par catégorie. Cela a été fait pour les trajectoires elliptiques dans [Minotti 96] puis repris dans [Szlabowicz 06].
Par définition, tout point du stator possède une vitesse moyenne nulle sur une période. Sa
position de départ et d’arrivée sont identiques, la trajectoire est périodique. Certains de ces points transmettent du mouvement au rotor. On s’intéresse aux différentes trajectoires que peut avoir un point du stator qui, à un instant donné, a entrainé le rotor.
On décompose une période de la trajectoire du point en deux demi-périodes séparées par
l’inversion de vitesse. On appelle l’aller la phase durant laquelle le mouvement du point est dans la direction qu’il va induire au rotor, retour la phase inverse.
Dans un premier cas, le chemin peut être le même à l’aller et au retour, c’est une trajectoire
réversible. Dans le deuxième cas, le chemin est différent, la trajectoire présente une hystérésis. Dans le premier cas, pour que le rotor ait un mouvement non nul en moyenne, il faut qu’il y
ait une différence d’un point de vue de l’effet du stator sur le rotor entre l’aller et le retour. Dans le deuxième cas, il est clair la trajectoire se compose de trois parties. Pendant la
première, le stator est venu en contact, pendant la deuxième le stator a entrainé le rotor, pendant la

70
troisième le stator n’était plus en contact, la durée du contact est plus ou moins longue suivant la technique utilisée.
Chacune de ces catégorie est décomposée en sous catégories. Ces sous catégories s’appuient
sur la proportion de la trajectoire durant laquelle le stator et le rotor sont en contact. Sachant que l’on cherche toujours à exploiter le maximum de l’actionnement dans un but d’entrainement.
Entrainement à trajectoire réversible On décompose cette catégorie en fonction de la durée relative pendant laquelle la trajectoire
du point d’entrainement et celle du rotor sont confondues. Il faut, dans tous les cas, que la nature du contact entre le stator et le rotor dépende de la
direction du point d’entrainement. Contact permanent : Une technique est d’agir sur la vitesse de déplacement. C’est ce qui est réalisé dans le cas des
actionneurs Stick Slip dont l’inertiel est un cas particulier.
Figure 80. Illustration du principe Stick Slip extrait de United States Patent 7301257.
Les moteurs Stick Slip utilisent le fait que les forces de frottement dépendent de la vitesse.
Un déplacement rapide et un déplacement lent, de même amplitude n’entraineront pas le rotor de la même façon. On crée de cette manière la dissymétrie aller/retour.
Contact intermittent : Cette possibilité est utilisée dans les moteurs à cliquet dont l’arbre possède des cames.
Figure 81. Illustration du principe à cliquet extrait de United States Patent 7119478.

71
L’actionneur piézoélectrique prend appuie sur des cames. On est ici dans une structure qui semble difficilement miniaturisable.
Les actionneurs à impact constituent une variante à la fois du Stick Slip et du cliquet.
Figure 82. Illustration du principe Impact drive extrait de United States Patent 20050127789. Dans ces entraineurs, on profite de l’inertie fournie au rotor par l’impact et de l’angle
d’attaque pour dissymétriser les frottements. Cette deuxième dissymétrie est souvent utilisée [Galiano 99]. Elle est aussi mise en œuvre
dans les moteurs à ailettes.
Figure 83. Illustration du principe du Moteur à lamelles extrait de United States Patent
4959580. On profite ici de la dissymétrie créée par l’angle entre les ailettes et le rotor. Mis à part le Stick Slip qui est bidirectionnel, cette catégorie de techniques d’entrainement ne
génère que des moteurs à priori unidirectionnels. Entrainement à hystérésis On rappelle que dans ce cas, la trajectoire se compose de trois parties. Entre la phase
d’approche et celle de retrait, il y a la phase d’entrainement. Si la phase d’entrainement est longue, la trajectoire est alors dans la direction du mouvement du rotor. On décompose cette catégorie en fonction de la forme du cycle décrit par la trajectoire.

72
Trajectoires dont une partie de la phase d’entrainement est linéaire : On observe ces trajectoires dans le cas des actionneurs Inchworm et des marcheurs.
Figure 84. Illustration du principe Inchworm extrait de United States Patent 3902084.
Ce sont les faces des pinces qui participent par contact à l’entrainement. Si on observe ces
points, leur trajectoire est rectangulaire. C’est aussi le cas dans le marcheur qui est décrit ci-dessous.
Figure 85. Illustration du principe Marcheur extrait de United States Patent US6977461.
On peut cependant noter que dans ces deux exemples, d’autres formes de trajectoires étaient
envisageable. Elles pouvaient être triangulaires ou trapézoïdales par exemple. Trajectoire à tendance elliptique : Il existe de nombreuses techniques permettant de générer une trajectoire elliptique du point
d’entrainement [Sashida 93]. Elles peuvent avoir lieu dans des dispositifs cylindriques ou planaires.
Parmi ces méthodes, nous évoquerons les plus utilisées.
Superposition de modes à la résonance : Ces moteurs utilisent au moins deux actionneurs piézoélectriques qui excitent chacun un
mode de la structure.

73
Figure 86. Illustration du principe Superposition de modes 1 extrait de United States Patent
4613782.
Figure 87. Illustration du principe Superposition de modes 2 extrait de United States Patent
6765335. Les déformations induites par chaque actionneur sont déphasées temporellement et
spatialement les unes par rapport aux autres. Elles créent un mouvement elliptique. Dans les cas que nous avons représentés, le contact rotor stator est intermittent.
Conversion de mode : Il est possible de créer un mouvement elliptique avec un seul actionneur piézoélectrique par
conversion de mode. Il faut pour cela que la vibration créée par l’actionneur sollicite un autre mode de la structure.
Figure 88. Illustration du principe conversion de modes 2 extrait de United States Patent
4548090. Ici aussi, le contact stator rotor sera intermittent. Il est cependant possible d’exploiter
l’entrainement par trajectoire elliptique en assurant un contact permanent entre stator et rotor. C’est ce qui est réalisé dans les moteurs à onde progressive.

74
Onde progressive :
Figure 89. Illustration du principe Onde progressive extrait de United States Patent 4495432. La propagation d’une onde progressive le long de l’axe neutre d’un milieu d’épaisseur non
nulle crée une trajectoire elliptique des points positionnés en surface de ce milieu. Le contact entre le rotor et le stator est permanent.
Le moteur Shinsei exploite ce principe [Ghouti 00]. Une des manières de générer ce type d’onde est la rotation de mode. Dans le cas de la rotation de mode, un mode de déformation est sollicité. Il est ensuite mis en
rotation.
Figure 90. Illustration du principe Rotation de mode extrait de United States Patent 6940209.
Figure 91. Illustration du principe Rotation de mode extrait de United States Patent 2005026.

75
Toutes ces techniques ont été mises en œuvre dans de nombreuses réalisations et pour de multiples applications. Je n’ai cherché à illustrer que les principes. Les actionneurs à onde stationnaire, par exemple [He 98], ne sont pas apparus dans cet inventaire puisqu’ils peuvent notamment faire partie de la classe de conversion de modes ou superposition de modes. On trouvera des exemples de réalisations dans [Bouchilloux 01] et [Frayssignes 01].
1.4.2. Inchworm
Cette partie du document est majoritairement le fruit du travail de thèse de Sunyoto [th.2]. Nous avons réalisé un actionneur en réponse à la demande d’un laboratoire d’orthopédie dont un des sujets de recherche porte sur la régénérescence osseuse. Le dispositif voulu par ce laboratoire devait réaliser le déplacement d’une partie osseuse par rapport à une autre suivant des contraintes bien définies.
Figure 92. Principe de la régénérescence osseuse.
Un état de l’art des techniques d’actionnement osseux a été réalisé de manière à obtenir des
précisions sur le cahier des charges. L’actionneur devait être bloqué au repos (lorsque l’actionneur n’est pas alimenté, il doit
maintenir une distance constante entre les parties osseuses), permettre de faibles déplacements (le déplacement total cumulé sur une journée est de l’ordre du millimètre), disposer d’une course relativement longue en regard des déplacements élémentaires (sur une durée de plusieurs mois le déplacement total peut être de plusieurs centimètres), générer une force suffisante pour s’opposer à la raideur des matières organiques (tendons, peau), ne pas créer de champ magnétique afin de conserver la possibilité d’utilisation sous IRM.
L’actionneur répondant à ce cahier des charges est piézoélectrique. Nous avons adapté la technologie Inchworm™ (brevetée en 1975 patent US3902084) aux besoins particuliers de cette application médicale.
Un état de l’art de systèmes inchworm a été réalisé, aucun ne cumulait toutes les propriétés
attendues. 1) Définition du problème Nous avons donc défini une nouvelle structure permettant de réaliser l’actionnement
Inchworm. Cette structure a été dénommée Wistiti par la suite puisqu’elle en rappelle le mouvement.
L’actionneur réalisé schématisé en Figure 93 est constitué de deux éléments : la partie mobile (noyau), en gris, est une barre de section rectangulaire dont la longueur fixe la course de l’actionneur ; la partie fixe (stator), en noir, est une pièce métallique usinée, dans laquelle sont insérés trois éléments piézoélectriques. Les éléments piézoélectriques permettent de pincer ou
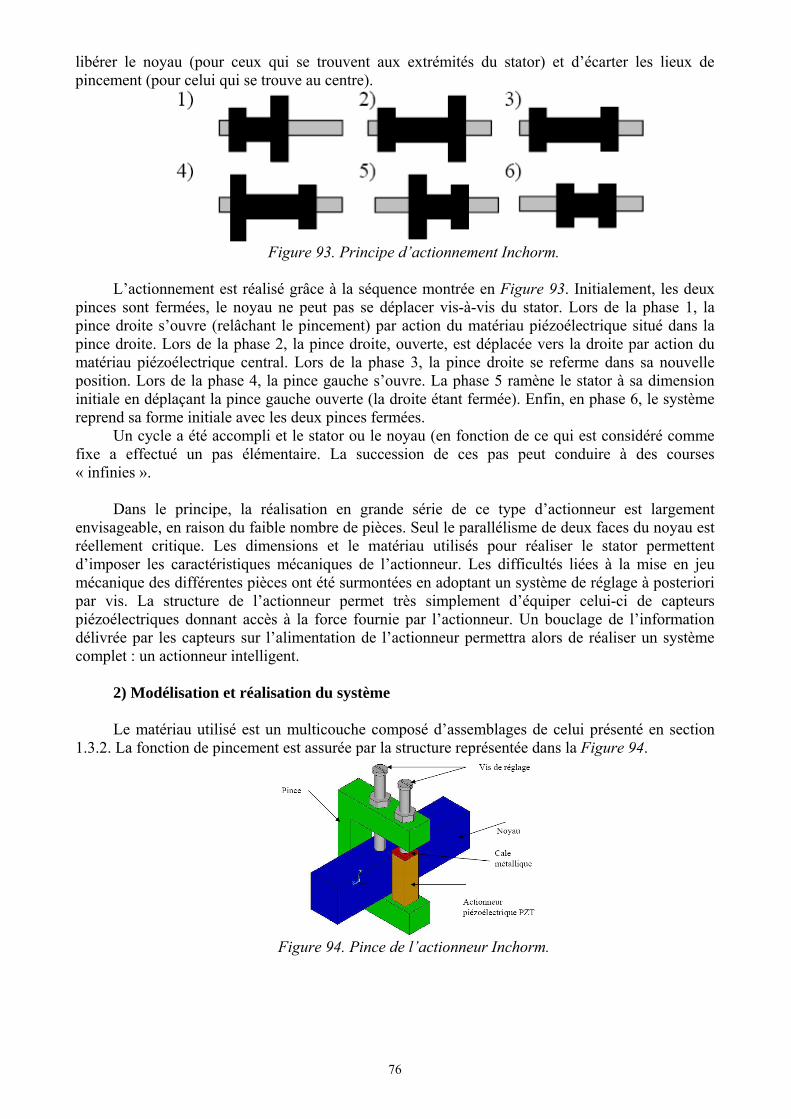
76
libérer le noyau (pour ceux qui se trouvent aux extrémités du stator) et d’écarter les lieux de pincement (pour celui qui se trouve au centre).
Figure 93. Principe d’actionnement Inchorm.
L’actionnement est réalisé grâce à la séquence montrée en Figure 93. Initialement, les deux
pinces sont fermées, le noyau ne peut pas se déplacer vis-à-vis du stator. Lors de la phase 1, la pince droite s’ouvre (relâchant le pincement) par action du matériau piézoélectrique situé dans la pince droite. Lors de la phase 2, la pince droite, ouverte, est déplacée vers la droite par action du matériau piézoélectrique central. Lors de la phase 3, la pince droite se referme dans sa nouvelle position. Lors de la phase 4, la pince gauche s’ouvre. La phase 5 ramène le stator à sa dimension initiale en déplaçant la pince gauche ouverte (la droite étant fermée). Enfin, en phase 6, le système reprend sa forme initiale avec les deux pinces fermées.
Un cycle a été accompli et le stator ou le noyau (en fonction de ce qui est considéré comme fixe a effectué un pas élémentaire. La succession de ces pas peut conduire à des courses « infinies ».
Dans le principe, la réalisation en grande série de ce type d’actionneur est largement
envisageable, en raison du faible nombre de pièces. Seul le parallélisme de deux faces du noyau est réellement critique. Les dimensions et le matériau utilisés pour réaliser le stator permettent d’imposer les caractéristiques mécaniques de l’actionneur. Les difficultés liées à la mise en jeu mécanique des différentes pièces ont été surmontées en adoptant un système de réglage à posteriori par vis. La structure de l’actionneur permet très simplement d’équiper celui-ci de capteurs piézoélectriques donnant accès à la force fournie par l’actionneur. Un bouclage de l’information délivrée par les capteurs sur l’alimentation de l’actionneur permettra alors de réaliser un système complet : un actionneur intelligent.
2) Modélisation et réalisation du système Le matériau utilisé est un multicouche composé d’assemblages de celui présenté en section
1.3.2. La fonction de pincement est assurée par la structure représentée dans la Figure 94.
Figure 94. Pince de l’actionneur Inchorm.

77
La fonction d’écartement est assurée par la structure représentée dans la Figure 95.
Figure 95. Ecarteur de l’actionneur Inchorm.
Les cales métalliques servent à répartir la pression exercée par la vis sur l’ensemble du multicouche. La structure complète est représentée en Figure 96.
Figure 96. Structure complète de l’actionneur Inchworm.
Chaque élément (pince et écarteur) a été modélisé indépendamment [CN.8]. Son action sur la
structure a été déduite des résultats du modèle. Pour chacun de ces éléments, on a mis en place un modèle analytique à partir des lois de
résistance des matériaux sur des structures de type poutre. Supposons une poutre de section bd, subissant une force orthogonale à b, dont la longueur est
orientée suivant x. Le déplacement des points de l’axe neutre de la poutre s’effectue suivant y suivant la relation :
YIM
xy Fz−=
∂∂
2
2
(83.)
Ou MFz est le moment de flexion, Y le module d’Young du matériau et I le moment quadratique de la poutre tel que I=bd3/12.
Les hypothèses contenues dans ces approches qui n’étaient pas triviales dans notre cas (petits déplacements, hypothèse de Nevier Bernouilli) ont pu être vérifiées par modélisation éléments finis (codes commerciaux). De la même façon, ce code nous a permis de déterminer les fréquences de résonnance des premiers modes de la structure afin de nous permettre de ne pas trop nous en approcher expérimentalement.
La réalisation d’un entrainement a été vérifiée expérimentalement [AI.7].

78
Figure 97. Mesure du déplacement de l’actionneur Inchorm.
On observe sur la Figure 97, une vitesse générée, dans les conditions de mesure de 1,5 μm
par seconde environ. Sur la base des modèles analytiques, une procédure d’optimisation de la structure a ensuite
été réalisée. La sensibilité des performances vis-à-vis de chaque paramètre a été étudiée. Le grand nombre de paramètres ainsi que leur inter corrélation dans les performances nous a amené à choisir un algorithme génétique afin d’obtenir les caractéristiques (physique et géométrique) de la structure répondant le mieux à un cahier des charges [CI.13].
3) Apports Le premier apport à notifier est l’apport expérimental. Chaque réalisation permet de se
confronter à la réalité et enrichi l’expérimentateur. Un prototype fonctionnel a été réalisé, il sert de démonstrateur des activités autour de la
piézoélectricité. L’actionneur Wistiti a fait l’objet d’une demande de dépôt de brevet auprès de la Cellule
Stratégique de la DPI(CESPI) du CNRS qui a donné un avis favorable. Cependant, FIST SA – France Innovation Scientifique et Transfert, l’organe de valorisation du CNRS n’a pas estimé pertinent de poursuivre la demande de brevet arguant que la découverte avait fait l’objet de trop nombreuses publications. Nous avons fait un recours face à cette décision. La situation en est là actuellement.
Une bonne manière de faire aboutir ce projet serait de pouvoir l’utiliser dans le cadre de la fonction pour laquelle il a été fabriqué. Il faudrait pour cela que d’autres orthopédistes soient informés de ce travail puisque ceux qui nous avaient contactés initialement ne font plus de recherches sur le sujet.
Cela permettrait de réellement valoriser ce travail qui a permis à Sunyoto d’obtenir le prix Mahar Schutzenberger du chercheur indonésien à la fin de sa thèse en 2006.

79
1.4.3. micropompe
Cette partie du document est majoritairement le fruit du travail de thèse de Camilo Hernandez [th.4]. Après avoir observé les techniques d’actionnement linéaire, l’idée d’utiliser une onde progressive pour générer du pompage a été testée. Un contact avec un laboratoire de micro fluidique nous a confirmé l’intérêt de cette technique.
Contrairement à une confusion courante, une micro pompe n’est pas une pompe de petite taille mais un dispositif permettant de générer de débits infimes.
Nous avons réalisé un état de l’art des techniques de micro pompage [CI.19] afin de cerner ce
qu’il était pertinent de mettre en œuvre. Nous avons ensuite établi une liste et proposé une classification des techniques de pompage utilisant la piézoélectricité [AI.11].
Figure 98. Classification des pompes piézoélectriques.
1) Définition du problème L’objectif était de pouvoir mettre en mouvement un fluide au plus près de l’endroit où le
mouvement est nécessaire (dispositif de taille raisonnable), de pouvoir créer un flux dans les deux sens et de contrôler sa valeur, d’avoir une structure de pompage simple permettant à terme sa miniaturisation. Ce dispositif devait, en outre, pouvoir actionner tout type de fluide.
La solution à cette problématique est une pompe péristaltique (mouvement des contractions
musculaires de l’intestin) dont la déformation du canal est induite par contact avec une lame vibrante siège d’une onde progressive.
L’approche consiste à générer une onde progressive dans une lame de longueur finie. Les
caractéristiques de cette onde (amplitude, fréquence, nombre d’onde) devront avoir été pré établies de manière à créer du pompage dans les canaux qui la subiront.
Figure 99. Structure de micropompe proposée.

80
2) Démarche de conception La déformation du canal et le flux induit en fonction des dimensions géométriques et des
caractéristiques physiques ont été simulés par éléments finis. Pour cela, un code de calcul par éléments finis commercial a été utilisé. L’équation de la lame, orientée de la même façon que dans la page 77, est résolue en
connaissant la masse volumique ρ et les sources Qf.
fQtybd
xyYI =
∂∂
+∂∂
2
2
4
4
ρ (84.)
La solution sert de source aux équations de Navier Stokes régissant le fluide. Notamment l’équation du bilan d’énergie.
FvvvvPtv t
rrrrrr
=∇+∇∇−∇+∇+∂∂ )])((.[).( μρρ (85.)
Où vr représente le champ de vecteurs vitesses des particules de fluide, P la pression, μ la viscosité et F les forces appliquées globalement au fluide.
Nous en avons déterminé une fonction analytique permettant de refléter les résultats. Cela
nous a permis de savoir quelle onde nous devions générer dans la lame vibrante. Il restait alors à mettre en place des techniques de génération d’une onde progressive dans une
lame et à dimensionner au mieux l’ensemble du système créant cette onde. 3) Solution proposée La solution qui nous a permis de tester le bon fonctionnement de la pompe n’est pas la
solution optimale en termes de miniaturisation. Elle a été mise en œuvre uniquement pour faciliter les mesures et valider l’approche. Cette solution comporte deux transducteurs de Langevin du type de celui qui a été décrit en section 1.3.4. L’utilisation des transducteurs de Langevin se justifie ici par la fréquence que l’on va utiliser pour faire vibrer la lame et par le fait que l’on veut orienter les vibrations vers la lame. Afin d’amplifier les déplacements, des cônes amplificateurs de mouvement sont insérés entre les actionneurs et la lame. Le système mécanique complet (sans les canaux) est représenté sur la Figure 100.
Figure 100. Structure mécanique utilisée pour le prototype de test.

81
Figure 101. Photo du prototype de test.
Il existe deux moyens de créer une onde progressive dans un milieu de longueur finie. Le
premier consiste à générer la vibration d’un côté et de l’absorber de l’autre [Sashida 93], le deuxième consiste à actionner les deux côtés par des vibrations à une fréquence intermédiaire entre deux modes de résonnance et déphasées de π/2 [Loh 00].
Les deux techniques ont été mises en œuvre. Dans le premier cas (vibreur-absorbeur), le système doit être optimisé en termes de transfert
d’énergie. Pour cela, on utilise une représentation par schéma électrique équivalent de l’ensemble du système.
Figure 102. Schéma électrique équivalent de l’actionneur linéaire.
On peut alors, à partir de cette représentation adapter d’un point de vue énergétique
l’ensemble de la structure (transducteurs de Langevin ou autres actionneurs, cône, lame, charge électrique).
Dans le deuxième cas (vibreur-vibreur), afin d’obtenir l’onde la plus progressive possible, on
doit agir sur la fréquence d’excitation et la position des actionneurs vis-à-vis des extrémités de la lame. Pour cela, un modèle analytique de la vibration créée par deux actionneurs a été développé.
4) Réalisation du système Finalement, l’ensemble de la pompe a été fabriqué et caractérisé. Une comparaison a été faite
avec les résultats attendus par modélisation sur le débit de la pompe et sur sa contre pression.
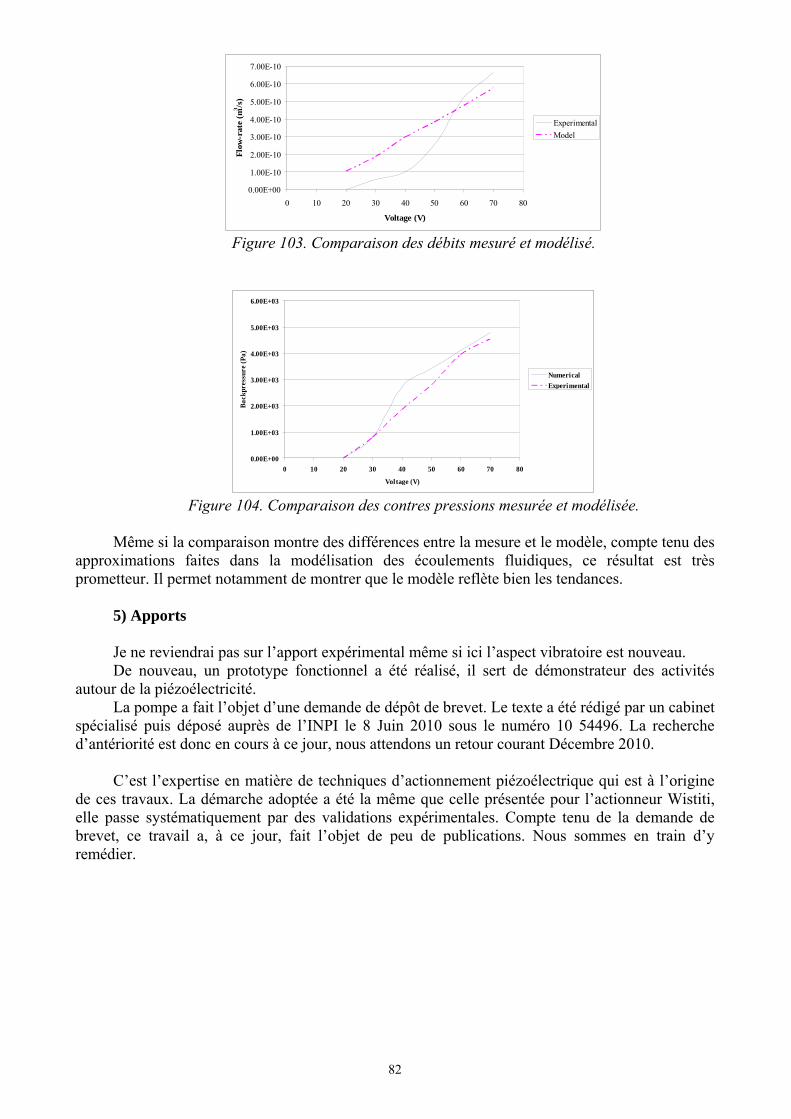
82
Figure 103. Comparaison des débits mesuré et modélisé.
Figure 104. Comparaison des contres pressions mesurée et modélisée.
Même si la comparaison montre des différences entre la mesure et le modèle, compte tenu des
approximations faites dans la modélisation des écoulements fluidiques, ce résultat est très prometteur. Il permet notamment de montrer que le modèle reflète bien les tendances.
5) Apports Je ne reviendrai pas sur l’apport expérimental même si ici l’aspect vibratoire est nouveau. De nouveau, un prototype fonctionnel a été réalisé, il sert de démonstrateur des activités
autour de la piézoélectricité. La pompe a fait l’objet d’une demande de dépôt de brevet. Le texte a été rédigé par un cabinet
spécialisé puis déposé auprès de l’INPI le 8 Juin 2010 sous le numéro 10 54496. La recherche d’antériorité est donc en cours à ce jour, nous attendons un retour courant Décembre 2010.
C’est l’expertise en matière de techniques d’actionnement piézoélectrique qui est à l’origine
de ces travaux. La démarche adoptée a été la même que celle présentée pour l’actionneur Wistiti, elle passe systématiquement par des validations expérimentales. Compte tenu de la demande de brevet, ce travail a, à ce jour, fait l’objet de peu de publications. Nous sommes en train d’y remédier.
0.00E+00
1.00E-10
2.00E-10
3.00E-10
4.00E-10
5.00E-10
6.00E-10
7.00E-10
0 10 20 30 40 50 60 70 80
Voltage (V)
Flow
-rat
e (m
3 /s)
ExperimentalModel
0.00E+00
1.00E+03
2.00E+03
3.00E+03
4.00E+03
5.00E+03
6.00E+03
0 10 20 30 40 50 60 70 80
Voltage (V)
Back
pres
sure
(Pa)
NumericalExperimental

83
1.4.4. Mobiles
Cette partie du document présente l’objet du travail de thèse d’Hassan Hariri. Après
avoir obtenu des résultats encourageants dans la création et l’utilisation d’une onde progressive dans un support linéaire et de dimension finie, nous avons voulu appliquer ce principe à la propulsion.
Après un état de l’art des techniques de propulsion dans différents milieux [CI.23], nous
avons mesuré le potentiel offert par un mode de propulsion reposant sur la création d’ondes progressives dans une plaque. En effet, de nombreux être vivants, dans différents milieux (terrestre, aquatique, aérien) recréent des mouvements ondulatoires progressifs (reptation pour le milieu terrestre, ondulation pour le milieu aquatique ou torsions des ailes pour le milieu aérien).
Des pastilles piézoélectriques collées sur un support induiront des oscillations qui devront
générer des ondes progressives. On se trouve ici confrontés à une problématique de type bilame comme elle a été définie dans la section 1.3.3.
1) Définition du problème
Figure 105. Structure étudiée pour les mobiles.
Dans un premier temps, en choisissant des dimensions du support (la plaque) qui permettront
d’instrumenter convenablement le dispositif, nous avons cherché à déterminer les dimensions et emplacements des patches piézoélectriques qui induisent les déformations maximales de la plaque.
2) Solution proposée La solution a constitué à développer un code éléments finis permettant de modéliser des
structures non symétriques. Ce code permet d’obtenir les solutions en régime temporel (pour tester les cas où la sollicitation ne sera pas périodique) et en régime harmonique.
Ce modèle a été utilisé pour étudier l’épaisseur du patch piézoélectrique conduisant à la déformation optimale de la plaque à la résonnance. On remarque sur la Figure 106 que les déformations induites par un patch d’épaisseur donnée dépendent abondamment du matériau de la plaque.

84
Figure 106. Influence de l’épaisseur du patch sur la déformation de la plaque (pour
différents matériaux) à la fréquence de résonnance. En outre, l’épaisseur conduisant à la déformation maximale n’est pas la même en fonction du
matériau constituant la plaque. Ces simulations ont été effectuées à matériau piézoélectrique fixé puisque nous avons choisi
le matériau sur d’autres critères. En revanche, des études similaires ont été conduites sur la largeur et la longueur du patch.
3) Réalisation du système A partir de ces informations, nous avons pu déterminer les dimensions de l’échantillon à
utiliser.
Figure 107. Photo du patch à utiliser.
Ces composants ont été achetés, les manipulations vont pouvoir commencer. Parallèlement, il
reste à compléter le code éléments finis de manière à pouvoir aussi utiliser les matériaux piézoélectriques sous effet directe afin de faire jouer à certains le rôle d’amortisseurs.

85
1.4.5. Stick slip
Cette partie du document présente l’objet du travail de stage de Tian Yi. Nous voulions
tester une forme particulière de Stick Slip et par la même occasion, réaliser un démonstrateur de ce type d’actionnement. Pour cela, nous avons utilisé des actionneurs multicouches.
Après un état de l’art des différents dispositifs Stick Slip utilisant des matériaux
piézoélectriques, nous nous sommes rendu compte qu’il n’existait pas (à notre connaissance) d’article sur la forme la plus élémentaire qui soit.
Celle-ci serait composée de deux masses en contact avec le support, reliées entre elles par un
actionneur piézoélectrique. Nous l’appellerons l’otarie par la suite pour sa ressemblance de principe de locomotion.
1) Définition du problème
Figure 108. Structure Stick Slip étudiée.
Nous nous sommes fixés comme données du problème l’échantillon piézoélectrique
(multicouche utilisé dans th. 2) et les matériaux du support et des masses. Il restait à déterminer les masses M1 et M2 ainsi que l’allure de la tension en dents de scie permettant d’atteindre des caractéristiques prédéfinies de l’actionneur piézoélectrique.
2) Solution proposée Le modèle mis en place est analytique. Il applique le principal fondamental de la dynamique
en effectuant un bilan des forces sur l’actionneur. Il permet de déterminer la vitesse et la force de l’otarie en fonction des paramètres physiques et géométriques du système ainsi que de la source de tension.
Soient x1 et x2 les déplacements des masses en direction du multicouche. Soient f1 et f2 les forces extérieures appliquées aux masses dans la direction opposée à x1 et x2 (forces de frottement ou force d’entrainement). Soient V la tension appliquée au multicouche, S sa surface, tp l’épaisseur d’une couche et n le nombre de couches, on obtient :
Extension rapide
Contraction lente

86
2
2
22
21
22
1
1
12
11
11
Mf
MVKx
MKx
MKx
Mf
MVKx
MKx
MKx
vee
vee
−+−−=
−+−−=
&&
&&
(86.)
Avec Ke=S/(nS33tp) et Kv=nKed33. 3) Réalisation du système Nous avons choisi le rapport des masses donnant la vitesse maximale sous tension donnée. Le
prototype a alors pu être réalisé.
Figure 109. Photo de l’otarie avec échelle.
Des tests de validation du modèle ont été effectués à vide. On peut par exemple comparer les
vitesses mesurée et obtenue par le modèle.
Figure 110. Déplacement expérimental et modélisé en fonction du temps.
Sur la Figure 110, on observe que le modèle donne des résultats satisfaisants concernant la
vitesse. On peut aussi déterminer avec le modèle la fréquence optimale de travail. Il existe en effet une fréquence pour laquelle la vitesse est maximale.

87
4) Apports Un prototype fonctionnel a été réalisé, il sert de démonstrateur des activités autour de la
piézoélectricité. Si j’ai voulu revenir sur cet exemple très simple, c’est parce qu’il illustre totalement
l’approche que je cherche à suivre pour la réalisation des systèmes piézoélectriques.
1.4.6. Perspectives
Des exemples de réalisations de systèmes d’entrainement ont été montrés. Une perspective
consiste à rentabiliser ce qui a été fait en trouvant des débouchés. Il faudra alors redimensionner les systèmes en fonction de l’application et les outils de cette étape ont déjà été développés. En revanche, en ce qui concerne l’optimisation, il serait intéressant d’avoir une démarche un peu plus systématique en s’appuyant sur des logiciels développés dans ce but (Prodesign) et sur l’expérience de laboratoires comme le Laplace à Toulouse et le Laboratoire de Mécanique Appliquée à Besançon.
A propos des systèmes piézoélectriques d’entraînement, de nombreuses stratégies sont
possibles, il me semble nécessaire de les mettre toutes en œuvre afin d’en mesurer les champs d’application. Souvent les centres de recherche sont spécialisés dans un type d’entraînement.
La réalisation de systèmes donne de nombreuses idées de nouvelles réalisations. Celles qui m’attirent particulièrement couplent différents domaines de la physique : fluidique [Mehlfeldt 08] comme à l’université de Siegen, aérodynamique [Ooi 04] comme à l’école de mécanique et de production énergétique à Singapoure, thermique, … Dans cette partie, on a surtout abordé les systèmes d’entraînement mais les applications d’ondes ultrasoniques sont nombreuses et ne se limitent pas à la création d’un déplacement [David 02]. C’est par exemple le domaine de l’université François Rabelais à Tours ou de la Nasa en Californie.
En ce qui concerne le domaine d’application, le médical me semble particulièrement honorable. Avec ce qui a été dit avant, le procédé « Ultrasonic hyperthermia » de traitement contre le cancer est un sujet qui me fait envie [Arnau 08 chap.18]. Il faudra alors contacter le département d’énergie électrique du centre d’investigation et d’études avancées du Mexique.
1.4.7. Références
[Rouchon 05] J.F. ROUCHON, Enjeu des actionneurs piézoélectriques face aux applications aéronautiques, J3eA, Journal sur l’enseignement des sciences et technologies de l’information et des systèmes, Volume 4, Hors-Série 1, 6 (2005).
[Spanner 10] K. SPANNER, An Overview of Piezoelectric Motors, ACTUATOR 2010,
Bremen, pages 167-176, Germany (Juin 2010). [Hemsel 00] T. HEMSEL, Piezoelectric linear Motors, ACTUATOR 2000, Bremen,
pages 250-253, Germany (Juin 2000). [Ueha 93] S. UEHA, Y. TOMIKAWA, Ultrasonic motors theory and applications,
Oxford, 1993. [Nogarede 96] B. NOGAREDE, Moteurs piézoélectriques, Techniques de l’ingénieur,
Référence D3765, 1996.

88
[Minotti 96] P. MINOTTI, P. LE MOAL, L. BUCHAILLOT, A. FERREIRA, Moteurs
piézoélectriques à onde progressive : Modélisation de la conversion d’énergie mécanique à l’interface stator/rotor, Journal de physique 3, Vol. 6, pp.1315-1337, 1996.
[Szlabowicz 06] W. SZLABOWICZ, Contribution au dimensionnement et à la réalisation
d'actionneur piézoélectrique à rotation de mode fort couple pour applications aéronautiques, thèse de l’institut polytechnique de Toulouse, 2006.
[Galiano 99] F. GALIANO, B. NOGAREDE, Un nouveau concept d’actionneur
piézoélectrique plan monophasé à onde stationnaire, Revue internationale de génie électrique, Vol. 2, No. 4, pp. 419-437, 1999.
[Sashida 93] T. SASHIDA, T. KENJO, An introduction to ultrasonic motors, Oxford
science publications, 1993. [Ghouti 00] N. EL GHOUTI, Hybrid modelling of a travelling wave piezoelectric motor,
DHP Thesis, Aalborg university, 2000. [He 98] S. HE, W. CHEN, X. TAO, Z. CHEN, Standing wave bi-directional linearly
moving ultrasonic motor, IEEE Transactions on ultrasonics, ferroelectrics, and frequency control, Vol. 45, No. 5, pp. 1133-1138, 1998.
[Bouchilloux 01] P. BOUCILLOUX, Modelling and testing of ultrasonic motors, PHD Thesis,
Rensselaer polytechnic institute, Troy, New york, 2001. [Frayssignes 01] H. FRAYSSIGNES, Etude des effets non linéaires et des pertes dans les
moteurs ultrasonores, Thèse de l’INSA de Lyon, 2001. [Loh 00] B.G. LOH, P.I. RO, An Object Transport System Using Flexural Ultrasonic
Progressive Waves Generated by Two-Mode Excitation, IEEE Transactions on ultrasonics, ferroelectrics, and frequency control, Vol. 47, No. 4, pp. 994-999, 2000
[Mehlfeldt 08] D. MEHLFELDT, H. WECKENMANN, G. STHOR, Modeling of
piezoelectrically actuated fuel injectors, Mechatronics, Vol. 18, pp. 264-272, 2008.
[Ooi 04] K. T. OOI, Simulation of a piezo-compressor, Applied thermal engineering, Vol. 24, pp. 549-562, 2004.
[David 02] J. DAVID, N. CHEEKE, Fundamentals and applications of ultrasonic
waves, CRC Press, 2002. [Arnau 08] A. ARNAU, Piezoelectric transducers and applications, Springer, 2008.

89
1.5. Conclusion J’ai fait le choix, dans cette partie du manuscrit, de passer sous silence de nombreux aspects
de mon activité de recherche passée. J’ai jugé qu’il était plus intéressant de n’aborder que ce qui doit être poursuivi. Je n’ai, par exemple, pas abordé ce que nous avions fait autour du moteur à onde progressive Shinsei. C’est pourtant le moteur ultrasonique le plus connu. Nous avons obtenu une expertise en commande de ce moteur en en développant un modèle simplifié qui a permis de créer des lois de commande en fonctionnement inhabituel (température, charge mécanique importante, …). Il se trouve que cette thèse relevait du domaine de la commande et que je n’en étais pas le maître d’œuvre.
Mon activité de recherche porte sur les trois aspects développés dans ce manuscrit et fait donc
le lien entre le matériau piézoélectrique et son utilisation dans un système complet. A mon sens, utiliser intelligemment la solution piézoélectrique nécessite de prendre un certain
nombre de précautions. En premier lieu, le matériau est au centre du fonctionnement des dispositifs, il faut donc avoir
conscience de ses limites et envisager des stratégies permettant de ne pas l’exploiter de manière abusive. Pour cela, nous avons développé une technique de modélisation du comportement électrique et mécanique du matériau. Elle s’appuie sur un modèle de Preisach pour lequel la fonction de distribution est déduite de mesures simples et ne faisant pas d’hypothèse sur la forme des cycles d’hystérésis. Nous avons montré la validité de ce modèle.
Dans un deuxième temps, la technologie piézoélectrique n’est pas assez mature (synthèse des
matériaux, durée de fonctionnement, modes d’alimentation requis) pour que les dispositifs piézoélectriques concurrencent avantageusement les solutions électromagnétiques. Il faut donc s’assurer que l’emploi de la piézoélectricité soit bien justifié par l’application. Pour cela, nous avons développé des modèles des dispositifs élémentaires qui permettront à terme d’établir les performances des actionneurs. Nous nous sommes appuyés sur des représentations par schémas électriques équivalent et des modélisations par éléments finis commerciaux ou développés par nos soins quand les codes commerciaux étaient en défaut.
Enfin, nous avons réalisé des systèmes d’entrainement qui nous ont permis de nous rendre
compte de la démarche de conception de systèmes piézoélectriques. Ce type de systèmes fait appel à différents domaines de la physique (électronique de puissance pour l’alimentation, électrostatique pour les calculs de champ, mécanique pour les déformations de structure, acoustique pour la propagation des vibrations, …). Cela permet de mieux se préparer à la réalisation d’autres systèmes pour d’autres applications.
Afin de compléter le dernier point, pour exploiter au mieux la bonne puissance massique des
dispositifs piézoélectriques, ceux-ci doivent être conçus et dimensionnés au plus près de l’application.
L’approche développée dans ce manuscrit est multi domaines, multi physique (par le
couplage), multi niveau, c’est l’approche adoptée par l’équipe CoCoDi. En outre, elle cherche à regrouper les aspects commande, actionneur et fonction, c’est ce qui est visé dans le thème actionnement de cette équipe.

90
1.6. Perspectives de recherche Le contexte scientifique de mon projet de recherche est directement celui des dispositifs à
base de matériaux piézoélectriques. Le chiffre d’affaire induit par la production de ces matériaux représente plus de la moitié de celui des « smart materials ». Aujourd’hui ce sont donc ces matériaux sur lesquels reposent la plupart des applications des matériaux actifs. Après 30 ans d’essor des matériaux piézoélectriques (on comptait au Japon autant de brevets déposés entre 1972 et 1984 qu’entre 1988 et 1990), le dynamisme ne s’essouffle pas.
Les domaines d’application sont nombreux allant des capteurs ou récupérateurs d’énergie (par exemple au Satie à l’ENS Cachan) et amortisseurs (par exemple au LGEF à l’INSA de Lyon) aux actionneurs. Les échelles d’application aussi sont variées, allant des microsystèmes (par exemple à l’EPFL) aux systèmes de puissance (par exemple au Laplace à Toulouse). Aujourd’hui, on ne peut plus dire que les piézoélectriques ne trouvent leur justification que dans des niches, ils offrent des opportunités technologiques applicables à tout projet technique.
Certaines perspectives ont été énoncées en fin de chaque partie du document, ici je complète
globalement. Mes perspectives de recherche à court terme s’inscrivent dans la continuité de mon activité de
recherche des dix dernières années. Je pense qu’il est important de continuer à étudier en parallèle les différents niveaux qui peuvent exister dans l’étude de la piézoélectricité (matériaux, échantillons, dispositifs élémentaires, systèmes). C’est ce qui structure l’institut de technologie de Tokyo. Mon objectif principal reste de concevoir des dispositifs piézoélectriques de taille centimétrique répondant à des besoins clairement définis (conception système au plus près de l’application). Dans le monde, cette thématique de recherche est fortement représentée (Etats-Unis, Japon, Allemagne) mais en France ce n’est pas le cas. Une bonne connaissance du comportement du matériau permettra de réaliser des actionneurs intégrant les fonctions de capteur (comme l’a montré le LGEF dans une collaboration avec l’université de Tohoku et l’entreprise Honda), d’utiliser au mieux les matériaux et donc de minimiser la quantité de matériau nécessaire, de s’intéresser à des modes de fonctionnement particuliers des actionneurs (fonctionnement dans des gammes de température, pression, rayonnement inhabituelles, fonctionnement en mode dégradé) pour lesquels je ne connais pas de travaux antérieurs.
Pour la mise en œuvre de ce projet, une approche suivant trois axes me semble nécessaire. Du point de vue des matériaux, il me semble que les modèles phénoménologiques sont
suffisamment développés et que l’on a montré qu’on pouvait obtenir une loi de comportement numérique la plus proche possible de celle mesurée expérimentalement. Ce travail permet de tenir compte dans les codes de calcul du comportement non linéaire, non réversible des matériaux et devra être mis à profit dans la commande des actionneurs piézoélectriques. Avec ce constat, je pense qu’il faut maintenant s’intéresser à des modèles prédictifs du point de vue des propriétés physiques compte tenu de la composition et de la structure des substances. Cette approche est possible avec les modèles multi échelles par exemple développés à l’EPFL. Cela permettra de mieux comprendre les paramètres déterminants des matériaux qui engendrent les propriétés et, à terme, pouvoir concevoir un matériau en vue d’obtenir une propriété prédéfinie. D’autre part, une caractérisation fine du comportement électrique du matériau permettra d’avoir accès à partir de mesures électriques aux conditions mécaniques subies par le matériau. Pour cela, des caractérisations électriques sous contraintes mécaniques sont nécessaires.
Les actionneurs piézoélectriques sont toujours constitués d’une structure mécanique et d’un
matériau piézoélectrique inséré de manière à faciliter son utilisation (c’est ce qu’on désigne par dispositif élémentaire). Pour certains de ces dispositifs élémentaires (bilames, multicouches, Langevins), nous avons déjà construit une expertise. Je pense nécessaire de maintenir une veille

91
technologique et d’intégrer de nouvelles structures à notre « base de données numérique ». Je pense notamment aux structures flextensionnelles (moonie ou cymbal) qui sont de plus en plus utilisées. Parallèlement, il me semble intéressant de développer des codes numériques de dimensionnement des dispositifs élémentaires afin, en les intégrant à des structures plus complexes, de s’assurer de leurs caractéristiques. C’est l’approche développée à l’Institut Jean le Rond d'Alembert de l’université Paris6.
Du point de vue des systèmes, je trouve que l’offre en technologie piézoélectrique reste
marginale compte tenu du potentiel offert par cette voie. Il me semble donc qu’il existe encore de nombreux domaines dans lesquels les dispositifs piézoélectriques ont beaucoup à apporter. Une méconnaissance de cette technologie pousse à croire qu’elle nécessite des tensions élevées et que les déformations sont trop faibles pour être exploitables. En réalité, c’est la durée de vie qui peut éventuellement poser problème. Il faut travailler sur cet aspect en développant par exemple des modes d’entraînement engendrant moins d’usure. De manière générale, le recul que l’on a sur les actionneurs piézoélectriques est moins grand que celui sur les actionneurs électromagnétiques. Il faudra donc du temps pour offrir des produits intégrant des lois de commande aussi pertinentes et assurant, par exemple, un fonctionnement, fut il limité, en cas de défaillance de l’actionneur.
A plus long terme, grâce aux puissances volumiques élevées des actionneurs piézoélectriques,
c’est dans le domaine des microsystèmes que les dispositifs piézoélectriques s’imposeront totalement. Cela me conforte dans l’idée que même si les démonstrateurs peuvent être réalisés dans des dimensions centimétriques, il faut n’utiliser que des formes et des liaisons mécaniques miniaturisables. Je pense aussi que dans la phase de miniaturisation des dispositifs, il faudra des gens ayant une connaissance pratique de la piézoélectricité. Je veux en faire partie et compléter à mon niveau les travaux de l’IMS à Bordeaux, du TIMA et du G2ELab à Grenoble, du LMA à Besançon ou de l’IEMN.
En ce qui concerne les moyens à disposition et le déroulement prévu pour ce projet, il faut
préciser que l’activité autour des matériaux piézoélectriques dans mon équipe de recherche s’est mise en place progressivement au cours des dix dernières années. Une bonne partie du matériel nécessaire est donc disponible et ce projet s’inscrit dans la continuité des activités actuelles. En outre, les relations nationales (publiques et privées) qui se sont tissées durant cette période permettent aujourd’hui de faire des demandes budgétaires auprès des organismes de financement de la recherche.
Pour le volet applicatif de mes activités de recherche, deux projets sont à l’étude avec des industriels (un actionneur pour l’automobile ainsi qu’une vanne piézoélectrique).
Pour le volet plus amont, le LGEP est un cadre propice à ce que j’ai décrit dans mon projet de recherche (équipe ICHAMS pour les matériaux, département MOCOSEM pour les dispositifs élémentaires, équipe COCODI pour les systèmes).
En conclusion, j’évoquerai les points qui dépeignent l’analyse m’ayant conduit à présenter ce
projet. Tout d’abord, à un niveau applicatif, je pense que c’est aux personnes capables d’offrir une
solution piézoélectrique d’aller chercher les applications dans lesquelles il serait porteur d’intégrer ce type de matériaux. Les futurs utilisateurs n’ayant pas encore le réflexe de s’orienter vers cette technologie.
D’un point de vue augmentation de la connaissance, je pense qu’il faut mener en parallèle les activités de conception avec des activités permettant une bonne connaissance des propriétés des matériaux. Je pense aussi qu’il faut utiliser l’expertise développée en commande autour des actionneurs électromagnétiques afin de l’appliquer aux actionneurs piézoélectriques.
Ces perspectives sont ambitieuses mais l’actualité me laisse penser que j’aurai du temps de
travail à occuper avant de pouvoir faire valoir mes droits à la retraite.


















