Collision Behaviour of a Small Spherical Particle on a ... · PDF fileballotini particle ......
10
Collision Behaviour of a Small Spherical Particle on a Large Stationary Droplet Subhasish Mitra 1 , Elham Doroodchi 1 , Vishnu Pareek 2 , Jyeshtharaj B.Joshi 3 , Geoffrey M. Evans 1 1 School of Engineering, University of Newcastle, Callaghan, 2308, NSW, Australia 2 Department of Chemical Engineering, Curtin University, WA 6845, Australia 3 Homi Bhabha National Institute, Mumbai 400094, India E-mail: [email protected] Abstract— In the present work, collision behaviour of a solid particle on an unconfined gas-liquid interface e.g. droplet was studied at low Weber number range. A glass ballotini particle (1.17 mm) was impacted on a stationary water droplet (3.15 mm) at the Weber number range of 0.2 to 3.6 and the collision process was captured by high speed imaging technique. It was observed, at lower to intermediate impact velocity range, that the particle was partially submerged into the droplet and slide along the convex interface whilst at higher impact velocity, the complete penetration was observed. Based on the forces acting on the particle at the interface, a simple model is proposed providing a satisfactory agreement with the experimental observations. Of all the forces involved, surface tension force was found to dominate the collision process in all the cases investigated. A 3D CFD model has also been developed incorporating the dynamic meshing technique with multiphase Volume of Fluid method which qualitatively agrees observed interface penetration behaviour. Keywords-droplet-particle collision; modelling; image processing; CFD; VOF; dynamic mesh I. INTRODUCTION The interaction of particles with a gas-liquid interface is an important element in a number of industrial processes. Of many process industry applications, fluidized catalytic cracking [7], bitumen upgrading by fluid coking, spouted bed coating and film flotation [4]are some of the significant processes where the interaction of the particle with gas-liquid interface e.g. droplet is critical for the process performance. Based on the size ratio of the droplet and particle, two distinct collision mechanisms can be identified - a smaller droplet impinging on a larger particle and a smaller particle penetrating through a larger droplet. While numerous studies are reported on the former mechanism ([1],[7],[9]), the latter one has not been paid much attention. Generally, a number of studies reported previously ([2-6], [8]), focused on the penetration dynamics of a planar gas-liquid interface by a particle; however the interaction behaviour of a particle on a curved interface i.e. droplet [13] remained less explored. When a particle impacts on a gas-liquid interface much larger than its own size, the particle may either be retained at the interface; or penetrate into the liquid. Often the falling particle impacts with the liquid free surface and forms a cavity. The particle continues its downward motion against opposing upward forces including surface tension, drag and buoyancy. If these forces are sufficiently strong, the impacting particle after collision with the interface will decelerate and eventually the velocity will become zero, before being carried upward by the restoring forces of the free surface. Depending on the fluid (surface tension, density, viscosity) and particle characteristics (shape, contact angle), the particle, in this case, may either bounce off or remain at the interface. Conversely, when particle impacts the interface at a higher velocity-the downward inertial and weight forces of the particle are greater than the upward interfacial, drag and buoyancy forces which result in the complete particle penetration through the gas-liquid interface. In the feed vaporization zone of the fluidized catalytic cracking process, firstly, the hot catalyst particle will stick to the feed oil droplet until complete evaporation of the droplet and secondly, the particle will penetrate the droplet indicating a brief contact period leading to partial evaporation of the droplet. In a similar fashion, in film flotation process, for these two cases the particle either gets collected in the overflow or appears in the underflow stream respectively. For both particle-droplet collision and film flotation it is apparent that for a given system the impact velocity of the particle is the prime factor that governs whether or not a particle will be captured or penetrates through the interface. Experimentally, it has been found that there exists a critical impact velocity beyond which the particle cannot be retained at the gas-liquid interface. Based on force and/or energy balances of the system, some studies ([11], [12]) have investigated the critical conditions when the particle has a nonzero velocity when it comes into contact with the liquid. Engh et al., [11] obtained theoretically the critical conditions for horizontal penetration of a particle, without consideration of the effect of the cavity formation caused by the particle impact. Ozawa and Mori [12] studied the critical conditions for a hydrophobic particle with density lower than the liquid. The effect of the cavity formation in their model was taken into consideration
Transcript of Collision Behaviour of a Small Spherical Particle on a ... · PDF fileballotini particle ......

Collision Behaviour of a Small Spherical Particle on a Large Stationary Droplet
Subhasish Mitra1, Elham Doroodchi1, Vishnu Pareek2, Jyeshtharaj B.Joshi3, Geoffrey M. Evans1
1School of Engineering, University of Newcastle, Callaghan, 2308, NSW, Australia 2Department of Chemical Engineering, Curtin University, WA 6845, Australia
3Homi Bhabha National Institute, Mumbai 400094, India
E-mail: [email protected]
Abstract— In the present work, collision behaviour of a solid particle on an unconfined gas-liquid interface e.g. droplet was studied at low Weber number range. A glass ballotini particle (1.17 mm) was impacted on a stationary water droplet (3.15 mm) at the Weber number range of 0.2 to 3.6 and the collision process was captured by high speed imaging technique. It was observed, at lower to intermediate impact velocity range, that the particle was partially submerged into the droplet and slide along the convex interface whilst at higher impact velocity, the complete penetration was observed. Based on the forces acting on the particle at the interface, a simple model is proposed providing a satisfactory agreement with the experimental observations. Of all the forces involved, surface tension force was found to dominate the collision process in all the cases investigated. A 3D CFD model has also been developed incorporating the dynamic meshing technique with multiphase Volume of Fluid method which qualitatively agrees observed interface penetration behaviour.
Keywords-droplet-particle collision; modelling; image processing; CFD; VOF; dynamic mesh
I. INTRODUCTION
The interaction of particles with a gas-liquid interface is an important element in a number of industrial processes. Of many process industry applications, fluidized catalytic cracking [7], bitumen upgrading by fluid coking, spouted bed coating and film flotation [4]are some of the significant processes where the interaction of the particle with gas-liquid interface e.g. droplet is critical for the process performance. Based on the size ratio of the droplet and particle, two distinct collision mechanisms can be identified - a smaller droplet impinging on a larger particle and a smaller particle penetrating through a larger droplet. While numerous studies are reported on the former mechanism ([1],[7],[9]), the latter one has not been paid much attention. Generally, a number of studies reported previously ([2-6], [8]), focused on the penetration dynamics of a planar gas-liquid interface by a particle; however the interaction behaviour of a particle on a curved interface i.e. droplet [13] remained less explored.
When a particle impacts on a gas-liquid interface much larger than its own size, the particle may either be retained at the interface; or penetrate into the liquid. Often the falling particle impacts with the liquid free surface and forms a cavity. The particle continues its downward motion against opposing upward forces including surface tension, drag and buoyancy. If these forces are sufficiently strong, the impacting particle after collision with the interface will decelerate and eventually the velocity will become zero, before being carried upward by the restoring forces of the free surface. Depending on the fluid (surface tension, density, viscosity) and particle characteristics (shape, contact angle), the particle, in this case, may either bounce off or remain at the interface.
Conversely, when particle impacts the interface at a higher velocity-the downward inertial and weight forces of the particle are greater than the upward interfacial, drag and buoyancy forces which result in the complete particle penetration through the gas-liquid interface. In the feed vaporization zone of the fluidized catalytic cracking process, firstly, the hot catalyst particle will stick to the feed oil droplet until complete evaporation of the droplet and secondly, the particle will penetrate the droplet indicating a brief contact period leading to partial evaporation of the droplet. In a similar fashion, in film flotation process, for these two cases the particle either gets collected in the overflow or appears in the underflow stream respectively.
For both particle-droplet collision and film flotation it is apparent that for a given system the impact velocity of the particle is the prime factor that governs whether or not a particle will be captured or penetrates through the interface. Experimentally, it has been found that there exists a critical impact velocity beyond which the particle cannot be retained at the gas-liquid interface. Based on force and/or energy balances of the system, some studies ([11], [12]) have investigated the critical conditions when the particle has a nonzero velocity when it comes into contact with the liquid. Engh et al., [11] obtained theoretically the critical conditions for horizontal penetration of a particle, without consideration of the effect of the cavity formation caused by the particle impact. Ozawa and Mori [12] studied the critical conditions for a hydrophobic particle with density lower than the liquid. The effect of the cavity formation in their model was taken into consideration

only as an empirical factor. The simplification increased the inaccuracy of their model because the interface depression has an important effect on the penetration process. Lee and Kim [5] investigated the critical conditions for highly-hydrophobic particle penetration without varying the contact angle. In their study, they observed various oscillation and bouncing phenomena which reduced in occurrence as hydrophobicity was reduced. Based on scaling analysis-considering the contribution of surface tension and inertia-they developed a criterion for sinking and rebounding. In a later study, Lee and Kim [6] studied sinking behaviour of a tiny sphere at low Reynolds number in a viscous liquid and extended the previously developed criterion for sinking by incorporating the effect of drag. Their model predicted the sinking behaviour well with the experimental observation before snapping of the meniscus.
In the present work, emphasis is given on understanding the interface penetration behaviour when a small particle impacts onto a larger droplet. For simplicity of the experiment, a stationary droplet has been used. Impetus of the study has been to develop a mathematical model based on the understanding of forces on the particle at an unconfined gas-liquid interface (droplet) which is unlike other studies where a confined interface has often been used. Moreover, 3D CFD model has been developed using dynamic meshing technique coupled with the Volume of Fluid (VOF) multiphase method to simulate the interface deformation process.
II. EXPERIMENTAL
A. Scope of experimental investigation
In the feed vaporization zone of FCC reactor where the atomized feed droplets and hot catalyst particles undergo intense collision, out of many different collision mechanisms, it is possible that a bigger particle collides with a smaller droplet which further collides with a smaller particle. Keeping this in view, experiments were carried out to investigate collision behaviour of an impinging droplet onto a stationary water droplet supported on a larger spherical surface. Specifically, the droplet particle interaction characteristics were studied at different droplet impact velocities at room temperature operating conditions. A water droplet of diameter 3.15mm was gently deposited onto a spherical hydrophobic polypropylene surface to obtain a spherical cap shape. Glass ballotini particles, with average diameter of 1.17 mm, were used in the experiment. The impact velocity of the particle was changed in the experiment by varying the height of fall of the particle. A high speed digital camera was used to capture the droplet-particle collision phenomenon.
B. Experimental setup
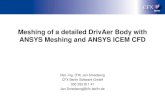
An experimental setup (Fig.1) with arrangement for depositing droplets on a hydrophobic surface and a particle release mechanism was used. The particle release mechanism consisted of a nozzle made of Swagelok 1/16” male connector fitted with 1/16” OD tube, connected to a vacuum pump with a solenoid valve in between. The nozzle position varying mechanism (k) consisting of adjustable roller having millimetric precision was used which could be moved both horizontally and vertically. This mechanism attributed to the
suitable positioning of the nozzle and different particle velocity by varying the nozzle (h) height vertically. A digitally flow controlled precision syringe pump (Adelab Scientific) fitted to a 1 ml syringe and a fixed needle size of 21G (ID: 0.51 mm) was used to produce the droplets. The needle was connected to the syringe pump by a soft silicone rubber tube and placed on a holder duly positioned on an X-Y optical traverse capable of producing micrometric precision movement in an X-Y horizontal plate. The particle position during the experiment was held constant at one end of the tube under vacuum, and released when required by turning off the solenoid valve hence breaking the vacuum allowing the particle to fall under gravity. For high contrast imaging, a high speed digital camera (Phantom v311, Vision Research) was deployed with a diffuser screen being placed between the test section and the light source.
Fig.1: Experimental setup-a) syringe pump with flow controller b) needle holding stand c) droplet deposition surface d) computer e) high speed CCD camera f) diffuser screen g) light source h) particle release nozzle i) solenoid valve j) vacuum pump k) particle release nozzle position varying mechanism l) X-Y optical traverse with height elevation jack.
C. Experimental methodology
The positioning of the droplet injection needle and the particle releasing mechanism was carefully conducted ensuring their proper alignment. A droplet was gently deposited on a polypropylene surface by operating the syringe pump at 0.3 ml/min flow rate set point. The particle release mechanism was activated by switching on the solenoid valve and the vacuum pump respectively. Initially, the particle was held carefully with a pair of tweezers and positioned at the tube end. To ensure the particle fall was consistent, a separate experiment was carried out by dropping the particle several times from the same position. Each time the particle fall was captured by the camera and images were analysed by an in-house MATLAB code. Fig. 2 presents the normal distribution of the lateral displacement (non-dimensionalised with respect to the image width) of the particle in flight having standard deviation of +/-0.0054 which ensured consistency of the particle release process. The impact process between the particle and the droplet was captured by the high speed
f
i
b g
d
j
e
h
a
k c
l

imaging technique and later analysed by an in-house MATLAB code.
Fig. 2 Uncertainty analysis of lateral displacement of the particle from a sample size of 10 follows a normal distribution pattern with average mean of 0.587 and average standard deviation of +/- 0.0054.
III. 1D PENETRATION MODEL FROM FORCE BALANCE
When a solid particle impacts into a gas-liquid interface,
different forces act on the particle eventually influencing its trajectory. Using scaling analysis, these forces [5-6] can be approximated as gravity (~ρsgrp
3), buoyancy (~ρfgrp2p), added
inertia (~ρfrp3d2p/dt2), form drag (~ρfrp
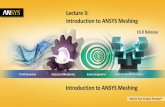
2(dp/dt)2), viscous effect (~μrpdp/dt) and surface tension (~σrp) where rp is particle radius, ρs is particle density and ρf, μ and σ are liquid density, viscosity and surface tension respectively. While sinking, except gravity and added-mass force, the particle motion is decelerated by action of all other forces. Fig.3 presents three different possibilities (floating, partial penetration and complete penetration) of particle impact at a gas-liquid interface.
Fig.3: Droplet interface penetration behaviour of a particle.
For hydrophobic particle surface, at lower particle impact Reynolds number, the particle demonstrates oscillating floating behaviour while at higher particle Reynolds number, the particle rebounds from the interface. In case of hydrophilic particle, the impact in general shows sinking behaviour
however at very low impact kinetic energy, the particle may float on the interface. Contact angle θ also varies as three phase contact line moves over the particle surface. Consideration of forces acting on the particle reveals that gravitational force on the sphere is always constant whilst all other opposing forces change as the particle gradually submerges into the interface.
Fig.4: Forces acting on the particle during interface penetration.
Fig.4 presents a general schematic of these forces acting on the impacting particle. The particle impacts on the droplet with a downward velocity Up. Initial distance between the droplet-particle centres xd and xp is expressed by d=rp+r d. φ is the penetration angle which varies from 0 to 2π indicating zero to complete penetration and can be expressed as
� � ������1 2� , (1)
where p represents the transient interface penetration distance and ranges from 0 to 1.
Hence the following force balance expressions can be written where sign in the brackets denotes the direction of the acting force with respect to the coordinate system specified in Fig.4.
Gravity:
�� � � �
����
���� (2)
Buoyancy:
�� � �� �
�����3�� � ��� (3)
Submerged height h in terms of penetration parameter p is expressed as h = 2prp. The buoyancy force remains active as long as the particle remains in contact with the droplet.
Surface tension:
�� � �� 2���� sin�� sin�� � $ (4)
When the particle passes through the interface, the surface tension force acts on the wetted particle perimeter to hinder its motion. The surface tension force is only active when the particle is partially submerged and disappears at complete penetration which is evident from the magnitude of penetration angle φ. Unlike many other models ([4], [8]) which predict non-zero surface tension force even at complete penetration,
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0.57 0.58 0.59 0.60
Nor
mal
dis
trib
utio
n fu
nctio
n f(
x,µ
,σ)
Lateral displacement of particle centroid (dimensionless)

the currently used model ([5], [8]) does not encounter that flaw. Depending on the position of the particle at interface, the surface tension force may have components in all three directions however for the sake of simplicity only the vertical component is considered in the present work. Although the contact angle changes as the particle passes through the interface, for sake of simplicity, a static contact angle θ is used in the modelling.
Drag:
Drag force acts in the opposite direction of particle motion. In other studies ([3], [6]) of depositing a particle at low particle Re at the gas-liquid interface, the contribution of viscous drag force was accounted for by assuming Stokes flow around the sinking particle. This approach however is valid only when particle Re<<1. In the present experimental studies, the particle Re number varies in the range of 8.4-37.3 which essentially excludes use of this approach. Consequently, contribution of viscous drag was accounted for by using the Schiller-Naumann [10] drag model as follows:
�� � �� %�&��
��v� (5)
For Re < 1000: drag coefficient Cd is given by
%� ���
()�1 + 0.15-./.012
For Re > 1000: drag coefficient Cd is expressed as
Cd = 0.44.
The projected area Ap = π(2rph – h2) is zero at the time of contact and eventually reaches the maximum value of πrp
2 at complete penetration. The drag force remains active as long as the particle stays in contact with the droplet from partial penetration to complete penetration regime.
Hydrostatic pressure:
�3 = (+ ��ℎ(2���ℎ (6)
The hydrostatic pressure on the submerged particle surface acts over the entire period of contact. At complete penetration, the opposing horizontal components cancel out each other and only the net vertical component over the submerged height of particle diameter remains active.
Added mass:
�45 = (− %6�� ������
�78�97 (7)
Although the gravity force always remains constant, the added/virtual mass force acting on the particle changes with the penetration depth p. The contribution of this force is accounted for by the virtual mass coefficient Cv which is zero when the particle is just in contact with the interface and increases to the half of the particle mass at complete penetration [12]. A linear form of this variation over the penetration depth is considered here.
Complete force balance:
Finally, applying Newton’s second law of motion, the complete force balance on the particle at interface could be presented as follows:
: �78�97 = �45 + �� + �� + �� + �� + �3 (8)
The above equation of motion was solved using the variable order ode113 solver routine of MATLAB using initial conditions of droplet-particle distance and particle velocity. Particle velocity in air/gas prior to impact on the interface could be determined by solving the following equation of motion considering the effect of gravity, buoyancy, drag and added mass force yielding,
:��;<�= = :�� >1 − ?@
?<A − �
1 �B�� � %�C�� − ��� �B�� � �;<
�= . (9)
IV. CFD MODELLING
A two-phase CFD model using interface tracking volume of fluid (VOF) approach was adopted in the finite volume method based on the commercial solver ANSYS Fluent (version: 14). A 3D model in Cartesian coordinates comprising of continuity, momentum and volume fraction equations were solved as follows,
D?D= + E. (�FG = 0 , (10)
D(?6HG D= + E. (�FGFG = −EI + E. [μ(EFG + (EFG LM + ��G + ��HHHG.(11)
The mixture density ρmix and viscosity µmix were calculated based on the individual phase fractions α where,
�5N9 = �OPO + ��(1 − PO , (12)
μ5N9 = μOPO + μ�(1 − PO . (13)
The volume fraction of each dispersed phase was solved by the following advection equation:
D?QRQD= + FG. E�OPO = 0 , (14)
while the phase fraction of the continuous phase was calculated using the following conservation equation,
∑ PTUNV� = 1 . (15) The momentum equation, in addition to pressure, gravity and viscous stress, included a surface force Fs where
�� = � ?WXYZ[RQ/.\(?Q] ?^ . (16)
The curvature of the interface (κ) used in (16) was expressed in terms of surface normal i.e.
_ = �
|U| ab U|U| . Ec |d| − (E. d e . (17)
The surface normal in the VOF approach is expressed as a gradient of phase volume fraction at the interface and can be written as
d = EPO . (18)
Wall adhesion is significant for fluids with non-zero contact angle on the surface. This effect was incorporated in the model expressing unit normal at the wall boundary in terms of unit

vectors nfg for fluid and t̂g for wall and the contact angle (θw) i.e.
df = dfj ���($j + k̂j �ld($j . (19)
A 5x5x5 mm unstructured grid containing 250,525 tetrahedral cells was used for the simulation using the GAMBIT meshing tool. Domain dimensions of the mesh were determined based on the field of view of the experimental images. A static contact angle (θw = 55o for water on glass surface) for wall adhesion and no-slip boundary conditions were applied on the particle surface. Pressure outlet boundary condition was applied on all the surrounding faces. A second-order upwind scheme was used for discretization of the momentum equation while the volume fraction parameter and pressure were discretized using Geo-Reconstruct and Presto scheme, respectively. Pressure-velocity coupling was obtained by Coupled scheme. A residual of 10-4 was set for convergence of continuity, momentum and volume fraction equations. All simulations were performed using a time step of 10-6 s with 40 iterations per time step. A first order implicit time stepping was used in all the simulations.
To model the solid particle motion, a dynamic meshing technique was used involving smoothing and remeshing scheme on the adjacent cells of the particle boundary. The smoothing scheme involved stretching of cells adjacent to the moving surface using a spring constant based on Hooke’s law. A spring constant of 0.5 was used in the present model. When cell motion is large, cells around the moving wall deform heavily and become highly skewed. To avoid simulation failure-these cells required remeshing. For computational efficiency, only the cells which exceeded a specified skewness of 0.7 or a range of cell size (min. to max.) were remeshed using a sizing function. The particle was considered to be a rigid body and motion was obtained by implementing a user defined function based on the six degree of freedom solver. The rotational motion of the particle was not simulated in the present work.
V. RESULTS AND DISCUSSIONS
Collision behaviour of an impacting particle on a stationary droplet was studied in the particle Weber number (We: ρfU
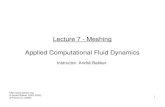
2dp/σ) range of 0.2 – 3.6. Height of fall of the particle was varied in the experiment to obtain the different particle We number based on the impact velocity prior to contact with the droplet. Fig.5a-c presents the experimental images of this collision behaviour. At low We numbers (Fig.5a), the particle shows a very low penetration of the interface and remains afloat. Due to the little off-centre position of the droplet on the spherical surface, and also slight asymmetric deposition of the particle, under the influence of both horizontal component of surface tension force and gravity force, the particle slides along the interface. At low We, the surface tension force remains dominant over the inertia of the particle and hence prevents interface penetration. When We was increased to 2.1 (Fig.5b), the particle inertia overcomes the opposing effect of the surface tension force slightly and a partial penetration is observed. Due to the off-centric deposition effect, the particle slides along the interface but relatively quicker compared to Fig.5a which could be attributed to more inertia associated with the particle and so greater surface tension force due to relatively larger penetration
hence more wetted perimeter. Complete penetration through the interface occurred when the particle We number is further increased (Fig.5c). Particle inertia completely overcomes the surface tension force in this case. The contribution of viscous effect over the surface tension effect on particle sinking phenomenon remains relatively insignificant as the Capillary number (Ca : Uµ/σ) in all the operating cases vary in the range of 0.0015 – 0.0066.
It is noteworthy that the impact kinetic energy of the particle is dissipated in the droplet which as a consequence imparts a radial flow in the droplet leading to an oscillatory motion. The droplet repeatedly spreads and contracts on the surface until the surface tension energy is balanced by the viscous dissipation. Due to the lager spreading of the droplet at higher particle We numbers (Fig.5c), the sinking height of the droplet reduces and the particle eventually strikes against the surface and then rebounds to the interface. In all the cases, images were taken to for sufficiently long time. For case (a) and (b), within this time, the particle slid along the interface from the top to the base of the droplet. For case (c), the particle touched the solid surface directly during impact, then rebounded and gradually settled at the base of the droplet. The times for all these three cases were smaller (~ 50 ms) by at least one order of magnitude than the oscillatory motion time (~ 1000 ms) of the droplet due to dissipation of the kinetic energy of the particle. So, evidently the oscillatory flow had not completely dampened out by the time particle impingement dynamics was over.
Fig.5: Collision behaviour of glass ballotini particle on water droplet a) floating at We- 0.2 b) partial sinking at We- 2.1 c) complete sinking at We- 3.6 at time instances: 0ms, 3.1ms, 9.2ms and 15.4ms (1953 frame/s).
A. Sinking time
It is of interest to predict the sinking time of the particle into the droplet in applications such as (1) film floatation of minerals where preferential collection of a particular size material is desired from a large size distribution (2) FCC feed vaporization section where intimate contact of droplet-particle is desired for fast heat transfer. The characteristic sinking time can be predicted from the characteristic length and time scales
(a)
(b)
(c)

of the system. At the time of impact at the interface, particle inertia Ip can be scaled as:
Ip ~ ρprp3ap , (20)
where ap is the particle acceleration. The surface tension force can be scaled as:
Fs~ σrp . (21)
Considering dominant effect of surface tension over viscous force as evident from above reported Ca numbers, (20) and (21) can be equated to obtain the scale of deceleration as:
ap ~ σ/(ρsrp2) . (22)
If length-scale of the particle sinking process is considered to be approximated by the capillary length, then:
lc = √σ/(ρlg) . (23)
The time needed for capillary gravity wave to travel this capillary length distance is equal to,
ts ~ √ lc/g = [σ/(ρlg3)] 1/4 . (24)
After the impact at interface, if the particle sinks, the particle velocity gradually reduces. This reduction in velocity over the sinking time ts can be scaled as:
Us~apts . (25)
Substituting values of ap and ts from (22) and (24), and after some algebraic manipulations rearranging the variables in the dimensionless forms, one can obtain [5]:
WeBo3/2 ~ 1/ρ2 (26)
where Bo is Bond number (ρf gdp2/σ) and ρ is particle-droplet
density ratio (ρs/ρf). The above expression actually gives a criterion for particle sinking process. Using the operating conditions of the experiment, the criterion is evaluated against the experimental observations and listed in Table-1.
TABLE I: Particle sinking criterion
Op. cases (h - mm)
WeBo3/2 1/ρ2 Criterion Exp. observation
0.59 0.014 0.159 no sinking
Partial sinking (very little
submergence)
6.59 0.161 0.159 sinking partial sinking (~half of the particle is
submerged)
11.59 0.283 0.159 sinking complete sinking
The comparison indicates that the scaling analysis criterion quantitatively describes the sinking phenomenon which agrees well with the experimental observations. With increase in height of fall, the particle We number increases however the Bo number remains constant. This eventually increases the contribution of particle inertia over surface tension force and initiates the sinking process. Equation (24) gives an
approximate sinking time of 16.67 ms which over-predicts the average sinking time of 4.61 ms (standard deviation : 0.36ms) obtained from the experiment (Fig. 5c). This could be attributed to the approximation used in defining the characteristics length scale which includes the contributions of only surface tension and particle inertia and ignores the contributions of other forces. Considering effect of drag in addition to surface tension, Lee and Kim ([6] proposed
the following dimensionless sinking velocity,
Ca = (2/9)ρBo – (1/3)sin2(θ/2), (27)
where Ca number is given by Usµ/σ. The factor (1/3)sin2(θ/2) was used to account for the partially immersed particle at the interface. Eq. 27 provides some important physical insights indicating that higher density ratio and particle size favour the sinking phenomenon while increase in surface tension and contact angle oppose the process. Considering the sinking height ~ dp, charactersitic sinking time could be evaluated as ts ~ dp/Us. This approach however predicts a sinking time of 0.52 ms much lower than the experimentally observed sinking time which could be attributed to the scaling of sinking velocity Us higher by an order of magnitude than the experimentally observed one.
The model developed in (8) was used to predict the particle motion inside the droplet. Fig.6 and Fig.7 present the transient particle trajectory and velocity respectively simulated by the model in all three cases investigated. The droplet-particle center distance is indicated by h where the particle is positioned with a point contact at the interfac. A negative sign of h indicates that the particle has crossed the droplet centre which is considered as the origin of the coordinate system used in the modelling while a negative sign of the velocity indicates reverse motion of the particle. At lowest We number case (We-0.2), a very small penetration is observed which is in well agreement with the experiemental observation (Fig.5a). The model however indicates a small rebound due to the dominant surface tension force (Fig.8a-c). When We number is increased to 2.1, the model indicates complete penetration of the particle with a quick return to the interface which agees to experimental observation partly (Fig.5b). At We-3.6, the model prediction supports the experimental finding of complete penetration (Fig.5c).
Fig.6: Particle trajectory in different We number cases predicted by the model.
-1.0E-03
-5.0E-04
0.0E+00
5.0E-04
1.0E-03
1.5E-03
2.0E-03
2.5E-03
3.0E-03
0 0.005 0.01 0.015 0.02 0.025
h (m
)
Time (s)
We-0.2We-2.1We-3.6

In all cases, the model indicates particle does not penetrate through the other end of the droplet. This however experimentally could not be verified because of a spherical cap type sessile droplet resting on a solid surface was used in the experiment.
Fig.7: Velocity profile of the particle in different We number cases predicted by the model.
Transient changes of the forces are presented in Fig.8a-c. Gravity force remains constant in all cases while effect of buoyancy force on the overall dynamics remains insignificant. It is apparent that in all the cases, the surface tension force remains couple of magnitude higher over other forces particularly in the very low We case (Fig.8a). The sign change of the surface tension force can be attributed to the increase in penetration angle (φ) in larger penetration cases (Fig.8b-c). At very low We number (We-0.2), as mentioned earlier, the model predicts a small rebound from the droplet interface which is reflected in Fig.10a indicating all the forces diminish except gravity. At We-2.1, the particle submerges into the droplet and returns to interface ~ 17ms against the experimentally observed 9ms time particle remains at the interface in partially submerged state (Fig.5b). At higher We number (We-3.6), the model prediction indicates early submergence of the particle (~ 3.5ms) compared to 9.2ms sinking time observed in the experiment (Fig.5c). The drag force increases with increasing We number however the contribution of drag force remains comparatively less significant which is also evident from the aforesaid low Capillary number range used in the experiment. The drag force gradually diminishes as the particle velocity reduces due to deceleration caused by the opposing forces however it increases again gradually when particle motion reverses. At higher We number cases, hydrostatic force is found to have a significant effect which increases with an increase in penetration depth of the particle and remain constant as long as the particle remains inside the droplet. Fig.9 presents the 3D visualizations of the model outcomes at different We number cases. It is noteworthy to mention that interface deformation forming the air cavity is a well recognized complex process where movement of three phase
Fig.8: Forces acting on the particle a) We-0.2 b) We-2.1 c) We-3.6.
-1.0E-04
3.0E-18
1.0E-04
2.0E-04
3.0E-04
4.0E-04
5.0E-04
6.0E-04
0 0.005 0.01 0.015 0.02 0.025
For
ce (N
)
Time (s)
Gravity forceBuoyancy forceSurface tension forceDrag forceHydrostatic force
(a)
-2.0E-04
-1.0E-04
0.0E+00
1.0E-04
2.0E-04
3.0E-04
4.0E-04
5.0E-04
6.0E-04
0 0.005 0.01 0.015 0.02 0.025
For
ce (N
)
Time (s)
Gravity forceBuoyancy forceSurface tension forceDrag forceHydrostatic force
(b)
-2.0E-04
-1.0E-04
0.0E+00
1.0E-04
2.0E-04
3.0E-04
4.0E-04
5.0E-04
6.0E-04
0 0.005 0.01 0.015 0.02 0.025
For
ce (N
)
Time (s)
Gravity forceBuoyancy forceSurface tensionDrag forceHydrostatic force
(c)
-0.20
-0.10
0.00
0.10
0.20
0.30
0.40
0.50
0.60
0 0.005 0.01 0.015 0.02 0.025
Vel
ocity
(m/s
)
Time (s)
We-0.2We-2.1We-3.6

Fig.9: 3D visualizations of model prediction of droplet-particle collision at a) We-0.2 b) We-2.1 c) We- 3.6 (droplet – red colour, particle – blue colour).
Fig.10: CFD simulation of droplet-particle collision behaviour (We - 0.2) -isosurfaces coloured by the volume fraction of water.
contact line plays a pivotal role [4] which changes the contact angle during the penetration process. In the present model, for simplicity, a constant static contact angle has been used which presumably affects the model outcomes and associated
variations in the magnitude of surface tension force. To model this interface deformation behaviour, a 3D CFD –VOF model with dynamic meshing for the particle motion has been developed. The transient dynamics (3D isosurface above and x-
t = 3.0 ms t = 0 ms t = 9.0 ms t = 15 ms
(a)
(b)
(c)
t = 3.0 ms t = 0 ms t = 9.0 ms t = 15 ms

y cut-planes below) are presented in Fig. 10 for the We-0.2 case. The droplet shape deformation with time is quite apparent as the particle slowly penetrates through the interface. The gas-cavity formation becomes visible at later stage (t: 15 ms). In the experiment, this cavity however was not visible due to lower height of the droplet compared to the particle diameter. In contrast with the experimental observation (Fig.5a), where the particle stays at the interface with almost constant penetration depth, CFD simulation indicates continual slow penetration of the interface (Fig. 11) with significant change in the particle velocity profile at the interface (Fig.12).
Fig.11: CFD simulation of the particle trajectory profile at We-0.2.
Fig.12: CFD simulation of the particle velocity profile at We-0.2.
During penetration of interface, an internal motion is induced in the droplet around the particle. The total force exerted on
the particle due to this fluid motion could be accounted by the hydrodynamic pressure force and the viscous force. Hydrodynamic pressure force is obtained by integrating the pressure over wetted area of the particle while viscous force is obtained by integrating the shear force over wetted surface.
Fig.13: Transient evolution of pressure and viscous force components on the particle obtained from CFD simulation (We-0.2).
These two forces obtained from the CFD simulation are presented in Fig.13. The pressure force which combines the effect of the hydrodynamic pressure force and buoyancy force is an order of magnitude higher than the viscous force and evidently the dominating one in all three directions. The CFD simulation also confirms the relatively less influence of the viscous force on the droplet-particle collision dynamics in the low Weber number regime.
CONCLUSIONS
Interactions of glass ballotini particle with a stationary water droplet were studied in low Weber number regime. Depending on the impact Weber number of the particle, three different cases – straddling at the interface, partial sinking and complete sinking of the particle were observed. Based on the forces acting on the particle, a model was proposed which was in qualitatively good agreement with the experimental findings. It was noted that effect of surface tension force was dominant among other forces. While the contribution of drag force remained insignificant in all the cases investigated, hydrostatic force was found to contribute to the dynamics significantly. This was also supported by the CFD simulations which indicated dominance of pressure force over the viscous force. Although, due to lesser penetration depth available in the spherical cap droplet compared to the particle diameter, the interface deformation process forming the gas cavity could not be captured in the experiment, the CFD model could qualitatively predict it. As future scope of the work, the models
-9.0E-04
-8.0E-04
-7.0E-04
-6.0E-04
-5.0E-04
-4.0E-04
-3.0E-04
-2.0E-04
-1.0E-04
0.0E+000.0E+00 5.0E-03 1.0E-02 1.5E-02
h (m
)
Time (s)
-1.0E-01
-9.0E-02
-8.0E-02
-7.0E-02
-6.0E-02
-5.0E-02
-4.0E-02
-3.0E-02
-2.0E-02
-1.0E-02
0.0E+000.0E+00 5.0E-03 1.0E-02 1.5E-02
Vel
ocity
(m/s
)
Time (s)
Interface penetration begins
-1.5E-04
-1.0E-04
-5.0E-05
0.0E+00
5.0E-05
1.0E-04
1.5E-04
2.0E-04
2.5E-04
0 0.005 0.01 0.015 0.02 0.025
For
ce (N
)
Time (s)
Pr.force-xPr.force-yPr.force-zVis.force-xvis.force-yvis.force-z

developed in the present study would further be extended to simulate the applications involving droplet-particle collision coupled with heat transfer such as feed vaporization zone of the FCC process.
ACKNOWLEDGMENT
The authors gratefully acknowledge the financial support from Australian Research Council (ARC) and British Petroleum (BP), Kwinana, Western Australia to carry out this research work.
REFERENCES
[1] S. Chandra, C.T. Avedisian, “On the collision of droplet with solid surface,” Proceedings of Royal Society London A (432), pp.13-41,1991.
[2] D. Vella, D-G. Lee, and H-Y. Kim, “Sinking of a horizontal cylinder,” Langmuir, vol. 22, pp. 2972–2974, 2006.
[3] D. Vella, D-G. Lee, and H-Y. Kim, “Load supported by small floating objects,” Langmuir, vol. 22, pp. 5979–5981, 2006.
[4] D.Liu, “Film floatation of airborne particles impacting on a gas liquid interface,” Ph.D. Thesis, School of Engineering, University of Newcastle, Australia, 2012.
[5] D-G. Lee, and H-Y. Kim, “Impact of superhydrophobic sphere onto water,” Langmuir, vol. 24, pp. 142–145, 2008.
[6] D-G. Lee, and H-Y. Kim, “Sinking of small sphere at low Reynolds number through intreface,” Phys. Fluids, vol. 23, 072104, pp. 1-9, 2011.
[7] Y. Ge, L-S. Fan, “Droplet-particle collision dynamics with film boiling evaporation,” Journal of Fluid Mechanics 573, pp.311-337, 2007.
[8] M.J.van der Hoeven, “Particle-droplet collisions in spray drying,” Ph.D. Thesis, School of Engineering, University of Queensland, Australia, 2008.
[9] M. Pasandideh-Fard, “Capillary effects during droplet impact on a solid surface,” Phys. Fluids 8 (3), pp.650-659,1996.
[10] L. Schiller and A. Naumann, VDI Zeits, 77, pp. 318, 1933.
[11] T.A.Engh, H.Sandberg, A. Hulkvist and L.G.Norberg,”Si deoxidation of steel by injection of slags with low SiO2 activity,” Scandinavian J. of Metallurgy, vol. 1, pp.103-114,1972.
[12] Y. Ozawa and K. Mori, “Critical condition for penetration of solid particle into liquid metal,” Trans. ISIJ, Vol. 23, pp.769-774, 1983. 101st ISIJ Meeting, S221, Tokyo, April 1981.
[13] V.V. Dubrovsky, A.M. Podvysotsky and A.A. Shraiber,“Particle interaction in three phase polydisperse flows,” Int. J. Multiphase Flow, vol. 18, no. 3, pp. 337-352, 1992.