
Collection Planning System -...
15
Collection Planning System A Multi-Source Satellite Imagery Collection Optimization Application Software Capabilities Overview JANUARY 3, 2003 For Additional Information : Space Imaging/Thomas Lewis 303-254-2074 phone [email protected]
Transcript of Collection Planning System -...
Collection Planning System A Multi-Source Satellite Imagery Collection Optimization Application
Software Capabilities Overview
JANUARY 3, 2003
For Additional Information: Space Imaging/Thomas Lewis
303-254-2074 phone [email protected]

CPS White Paper, 1/3/2003
Table of Contents Table of Contents................................................................................................................ 2 Collection Planning System................................................................................................ 3
1.1 Resource Management........................................................................................ 3 1.2 Order Management ............................................................................................. 4 1.3 Access Determination ......................................................................................... 6 1.4 Planning & Scheduling ....................................................................................... 6
1.4.1 Opportunity Statistics.................................................................................. 6 1.4.2 Pass Deconfliction & Optimization ............................................................ 7 1.4.3 Detailed Collection Planning ...................................................................... 7 1.4.4 Pass Analysis .............................................................................................. 8 1.4.4 Plan File Management ................................................................................ 8
1.5 Optwise Scheduling Engine................................................................................ 9 1.5.1 Scheduling Algorithms ............................................................................... 9 1.5.2 Figure of Merit.......................................................................................... 11
1.6 Plan Status, Process Flow, and Distribution ..................................................... 12 1.6.1 Process Flow ............................................................................................. 13 1.6.2 Hardware Specification & Software Performance.................................... 14
1.7 Satellite Toolkit................................................................................................. 14 1.8 Custom Options ................................................................................................ 15
2

CPS White Paper, 1/3/2003
Collection Planning System
The CPS is a multi-satellite imagery collection planning system developed by Space Imaging and Orbit Logic. It is capable of optimizing an imagery collection schedule to maximize the value-weighted data return from limited space-based and ground-based system elements. The CPS ingests image collection orders, maps orders to candidate satellite sensors based on order parameters and defined satellite sensor capabilities, calculates constrained collection opportunity windows for each order, and determines an optimal collection schedule that takes into account user-defined and weighted scheduling factors including cost, order priority and resource preferences. The CPS provides the mission planner with table, Gantt, and 3D animated windows to view and edit their schedules and order sets. The CPS can be utilized on a frequent basis to re-plan for new orders, missed collections, or collections based on un-satisfactory images. The prime purpose of the CPS is to de-conflict and optimize the use of the available sensors and ground resources.
The CPS provides the following major functions. Details are provided in the following sections.
• Resource Management • Order Management • Access Determination • Planning and Scheduling • Plan Status, Process Flow, and Distribution
1.1 Resource Management
The CPS provides the capability for the mission planner to define and manage resources used for image collection including satellites and aircraft (and related onboard instruments) and ground stations. New satellites, aircraft, instruments and image types, and ground stations can be added by the user through a graphical user interface or existing resources can be modified, disabled for the current planning run, have blackout periods defined, or be deleted from the system. No software changes are necessary to add or modify resources used for imagery collection planning; CPS can evolve as new resource become available and existing resources fail or become obsolete. The following GUI forms are provided for resource definition and editing within the CPS system:
3
CPS White Paper, 1/3/2003
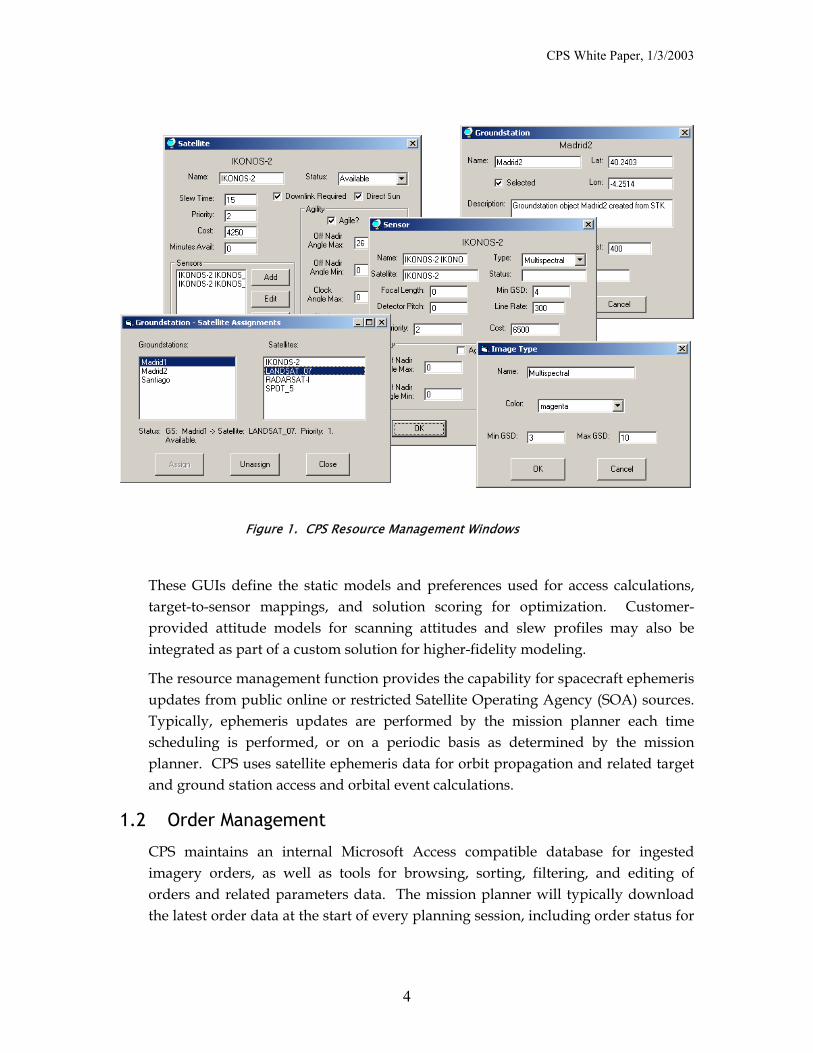
Figure 1. CPS Resource Mana ement Windows
hese GUIs define the static models and preferences used for access calculations,
craft ephemeris
1.2
icrosoft Access compatible database for ingested
g
Ttarget-to-sensor mappings, and solution scoring for optimization. Customer-provided attitude models for scanning attitudes and slew profiles may also be integrated as part of a custom solution for higher-fidelity modeling.
The resource management function provides the capability for spaceupdates from public online or restricted Satellite Operating Agency (SOA) sources. Typically, ephemeris updates are performed by the mission planner each time scheduling is performed, or on a periodic basis as determined by the mission planner. CPS uses satellite ephemeris data for orbit propagation and related target and ground station access and orbital event calculations.
Order Management
CPS maintains an internal Mimagery orders, as well as tools for browsing, sorting, filtering, and editing of orders and related parameters data. The mission planner will typically download the latest order data at the start of every planning session, including order status for
4

CPS White Paper, 1/3/2003
orders in process. The CPS window screenshots below are the main CPS window
Figure 2. CPS Main Win
view that includes the order table and the individual order details window.
dow
to include in each planning cycle.
tion to map orders with instrument ter requirements including image type
Figure 3. CPS Order Details Window
The mission planner may select which orders
CPS performs a resource assignment funcresources capable of meeting order parame
5

CPS White Paper, 1/3/2003
and resolution (GSD). Use of this function instead of manually specifying the
1.3
de daylight (for Panchromatic and Multispectral image orders), sensor field-of-view
is presented to the mission planner on the Order Details page for each order. Accesses are calculated for the full planning period (as specified by
h the access calculation process are the raw material for the scheduling function (see section 4.4.4, Planning
tion opportunity is given a desirability score based
1.4
llection schedules. See section 4.4.5 (Optwise Scheduling Engine) for a detailed description of the scheduling algorithm
PS. CPS order collection schedules may be exported
1.4.
satellite or aircraft to use for each order allows CPS to optimize the use of resources. Manual resource selection is also available as an override.
Access Determination
CPS is integrated with Satellite Toolkit (STK) to calculate satellite and aircraft sensor constrained access times to orders (ground area targets). Access times are order collection opportunity windows. CPS access calculations cover all orders included in the planning run and will determine access opportunities to each candidate sensor resource for each order. Constraints applied to access calculations inclu
(FOV), spacecraft and/or sensor off-nadir agility, and order resolution (ground sample distance (GSD)). Access times for each order are then further constrained by CPS for the requirement for simultaneous ground station access (if applicabale).
Computed access data
the mission planner on the CPS main window GUI). See the bottom portion of the Order Details GUI in section 4.4.2, Order Management, for an example of order access window data.
The order collection opportunities determined throug
& Scheduling). Each order collecon time and resource preference and cost. These desirability scores are used by the scheduling algorithms to optimize the schedule solution.
Planning & Scheduling
CPS provides the capability for image collection planning and optimization over any user-defined period of time, as well as file management to allow for the generation of multiple plan options. CPS applies Optwise scheduling algorithms for the generation of optimized order co
software incorporated into Cfrom CPS as schedule files for processing by 3rd party software to generate order requests for each satellite operating agency.
1 Opportunity Statistics CPS provides a tool to generate opportunity statistics by predicting available access opportunities for the entire specified target set. Each selected order in the target set will be processed to build the CPS planning target database and assign candidate
6

CPS White Paper, 1/3/2003
satellites for collection. Access statistics are determined (total number of passes expected, total access time, revisit time, etc.) for each candidate satellite and aggregate for all candidate satellites. Access calculations will include applicable target and spacecraft constraints. Collected access data will be processed and
analyze both individual target collection
1.4.g scenarios the planner has a limited number of
of satellite sensors during each pass window. Resource priority and cost for satellites, sensors, and ground antennas are also taken
lue of each pass for schedule optimization. The
1.4.
ss/flyover. Access
ies have been determined, CPS has a set of targets and a set
he scheduling engine returns a deconflicted schedule for collecting as many orders as possible within resource constraints and following
presented to the operator to help him opportunities and total expected collection resource loading. Resource loading is based on cost and resource preferences.
2 Pass Deconfliction & Optimization In many multi-satellite planninground station antennas (perhaps only one) that must be used to support multiple satellite imaging assets. If the satellite orbits are such that ground station contacts never conflict with each other then the planning process is simplified. In the real world this may not be the case.
CPS automatically deconflicts and optimizes the ground station support schedule as the first step of the scheduling process. Ground station pass times are calculated for all imaging assets. Pass supports are deconflicted for a prioritized set of ground antennas by weighting each pass based on the number and priority of imaging targets within the field of view
into account when weighting the vaground station support schedule is an output of the planning process along with the detailed sensor imaging schedule.
3 Detailed Collection Planning Detailed collection planning gets down to the business of assigning each order to a specific sensor on a specific satellite or aircraft on a specific paopportunities for the target set are determined by STK for each target to each candidate satellite/aircraft sensor using the latest ephemeris data and flight plans. All spacecraft and target constraints are applied to these access determinations. See section 1.3 for additional information on access determinations.
After access opportunitof windows of opportunity for the collection of each target. CPS then applies a desirability number to each collection opportunity for each target based on specific target collection time and resource costs and preferences. Each target also has an user-defined priority.
All of this information is then sent into the scheduling engine to come up with a collection plan for the week. T
7

CPS White Paper, 1/3/2003
the mission planner-defined priorities and weightings. See section 4.4.5, Optwise
1.4.CPS provides the tools to perform a detailed analysis of a specific pass; to view all
ure 4. CPS 3D Pass Animation
Through map graphics interaction the mission planner may bring up Order Details for any target displayed on the map simply by clicking on it.
1.4.
For this reason, the CPS will be designed to support the generation and management of multiple plans for identical
r et sets. Each plan is saved under separate
Scheduling Engine for more information about the optimization and scheduling algorithms available in CPS.
4 Pass Analysis
targets assigned to that pass along with a detailed high-fidelity three-dimensional animation including scanning and slew attitude profiles (see Figure 61, below). The system will also allow for the display of supplementary targets that have a status of
CONFLICT and/or NO ACCESS.
Fig
4 Plan File Management It is expected that the mission planners and their management will want to assess various scheduling options and preferences.
o overlapping time periods and targfilename. Planning files contain all pertinent information about a schedule so that it may be opened by CPS for analysis and editing.
8

CPS White Paper, 1/3/2003
1.5
on file to be passed to the DS from the CPS, for CPS to control the various DS preferences and
r the DS optimized solution to be passed back and
1.5.orithms are available for use by the mission planner; each is described
below. Different algorithms work better for different problem types, and certain thers. The algorithm that works best for one customer’s
1.5.
early as possible are important. Decisions made early in the task list cannot be un-done to improve later
is very predictable and for problems in which there
1.5.
ased on Optwise past experience is used to generate the possible task and time order lists. Each pass is graded based on a figure of merit (FOM) and the best solution is returned. The figure of merit will be discussed later. This algorithm will require more time than the One Pass algorithm since it has to run through the
Optwise Scheduling Engine
The Deconfliction Scheduler (DS) software from Optwise provides the most advanced scheduling algorithms available on the market, including the only neural network algorithm available in a COTS product.
The internal CPS interface to the Optwise DS will be through a DS API developed by Orbit Logic. This API allows a complete schedule problem definiti
scheduling algorithms, and foparsed by the CPS. Schedule problem definition files include required activities (imaging targets), resource (satellite and ground station) availability and usage, and scheduling preferences and constraints defined by the mission planner.
1 Scheduling Algorithms Multiple alg
algorithms run faster than oproblem set may not be the best for another. Mission planners will learn through experience the best algorithms to use for their specific imagery collection scheduling.
1.1 One Pass The One Pass algorithm makes one pass through the task queue assigning task start time to the earliest possible time within a task time slot. The order in which tasks and task slots are considered is dependant on the task priority and secondarily on the slot desirability. One Pass is the fastest of the algorithms but implicitly assumes that task priority, slot desirability and scheduling tasks as
performance. This algorithmand many interchangeable resources or little interaction between resources will perform as well as any of the other algorithms. Many problems, including the multi-satellite image collection problem, fit this description.
1.2 Multi Pass The Multi Pass algorithm makes multiple passes using the One Pass algorithm but modifies the task order and the time slot order prior to each pass. A set of expert system rules b
9

CPS White Paper, 1/3/2003
One Pass algorithm N number of times (N is set by the software based on problem
1.5.
between resources because it uses the constraint information as feedback during the schedule optimization problem.
exam ts and/or some resources
1.5.
rithm performs that task and then checks if any unscheduled tasks can be scheduled in the freed
. Th lobal Scheduling Algorithm followed by the R1
1.5.
l when a very unusual FOM (user generated) is being used to grade the performance. While constraints are obeyed they are not used to
ution. This algorithm is also useful when the primary goal is
complexity).
1.3 Global Scheduler The Global Scheduler algorithm simultaneously competes all possible task to time slot assignments using a neural network derived algorithm. Imagine a trading floor where a limited number of buyer/seller assignments must be made subject to the constraints (rules) of the trading floor. All the possibilities start out equal but the interaction of the competition quickly limits all but the best combinations. In this algorithm the order of the task and task slots are unimportant, but task priority and slot desirability affect the probability that a particular assignment will be chosen. Constraints between the tasks and resources limit the combinations of assignments. Multiple runs can generate a family of solutions. While internally this algorithm maximizes the total task duration time, the external FOM is used to choose the best solution. The Global Scheduler algorithm takes longer than the One Pass algorithm but generates globally optimized solutions. This algorithm is well suited to problems in which there are complex constraints
For ple, tasks using resources in differing amouncannot be used while another resource is in use.
1.4 Global Scheduler with Repair (Neural Net) The global scheduler algorithm does not explicitly schedule tasks as early as possible during the optimization process. The repair one (R1) algo
time e CPS demo runs the Galgorithm when the “Neural Net” scheduling algorithm is selected.
1.5 Random with Repair Another algorithm to search for solutions in an un-biased manner is to seed a random solution (and available options) and use the R1 algorithm to repair it. While the initial random solution will probably be invalid (in violation of constraints and having tasks with duration far less than desired) the repaired schedule will be valid. This algorithm’s strength is that it is unbiased and can find solutions that cannot be predicted by rules. It is usefu
help find the best solto load-level resource usage.
10

CPS White Paper, 1/3/2003
1.5.
t the optimal solution. What defines
rough the use of task dependant priorities, user definable constants to control how much weight each term in the FOM receives. A provision has also been made to allow the user to define an external function that can be added to the calculation.
2 Figure of Merit Possible schedule solutions are scored against each other in the Multi Pass, Global, and Random algorithms in order to selec“optimum” is determined by the figure of merit (FOM). The FOM formula is fixed, but the weighting of FOM components can be adjusted by the mission planner based on the goals of the planning session.
The figure of Merit (FOM) calculation used in conjunction with the de-confliction algorithms has been designed to give the user control of the FOM calculation th
( ) ( )( ) ( )
∑=
+++
++
=
itaskiiDuriearly
tidesireiduri
iassign
i
UserMaxBonusKEarlyBonusK
desireKdurationKationDesiredDur
durationKweightFOM p
m
ax
iorityTaskioritysmallestiorityestlweight
ii Pr
1PrPrarg +−=
where
and
talTa ststStartTaskEarlietStartTaskLastes
Actu StartStartskLa esEarlyBonusi −−
=
The constants Kassign , Kdur , Kdesire, Kearly, Kmax Dur, and User are user definable values that allow the FOM to be customized for each input problem. Kassign rewards the simple assignment of a task regardless of the duration. Kdur rewards tasks with longer duration over shorter duration. Kdesire rewards assignments that have higher slot desirability (where each feasible task slot possibility is listed in the input file and given a desirability). Kearly rewards the early assignment of tasks. Kmaxdur
rewards tasks that received resource assignment in excess of the minimum assignment time and less than the maximum assignment time. User allows a FOM
piled as a dynamic link library function compatible with a published interface (the current default function always returns zero).
contribution from an external function; this must be com
11
CPS White Paper, 1/3/2003
1.6
on planner with an exceptional awareness of the
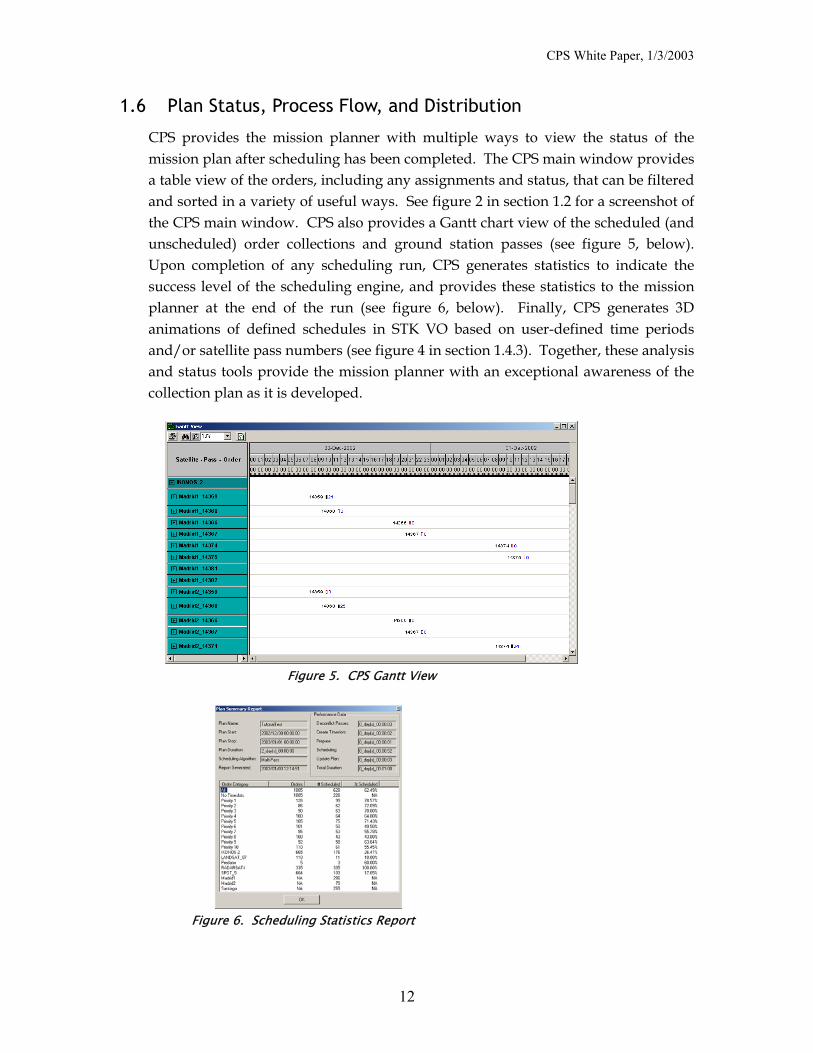
Figure 6. Scheduling Statistics Report
Plan Status, Process Flow, and Distribution
CPS provides the mission planner with multiple ways to view the status of the mission plan after scheduling has been completed. The CPS main window provides a table view of the orders, including any assignments and status, that can be filtered and sorted in a variety of useful ways. See figure 2 in section 1.2 for a screenshot of the CPS main window. CPS also provides a Gantt chart view of the scheduled (and unscheduled) order collections and ground station passes (see figure 5, below). Upon completion of any scheduling run, CPS generates statistics to indicate the success level of the scheduling engine, and provides these statistics to the mission planner at the end of the run (see figure 6, below). Finally, CPS generates 3D animations of defined schedules in STK VO based on user-defined time periods and/or satellite pass numbers (see figure 4 in section 1.4.3). Together, these analysis and status tools provide the missicollection plan as it is developed.
Figure 5. CPS Gantt View
12

CPS White Paper, 1/3/2003
1.6.1 Process Flow The CPS process described in this document for generating collection plans is a semi-automated flow controlled by the mission planner. The diagram below is a summary view of the CPS planning process.
Ingest Data
PrefilterOrders
Solve Schedule
GenerateMission Plan
CalculateAccesses
GenerateScheduler Input
Product orders, spacecraft ephemeredes,resource status, and order collection status
Determine satellite sensors that can meet basic requirements for each product order
Determine access opportunities for each order for each candidatesatellite sensor within order constraints (GSD, etc.)
ASCII file input for scheduling engine defines activities (ordercollections), resource availability, weighting factors, scheduling period
Scheduling engine generates optimized schedule solution to collect orders within defined access options and resource constraints
Collection schedule converted to schedule report format(s)
STK
OptimizePasses
Deconflict and optimize ground station pass support for multiple satellite and ground station resources
Figure 7. CPS Process Flow
The end product of a planning session by the mission planner is ground station support schedule and a schedule of collections assigned to various satellites and aircraft sensors at specific times. These schedules are output in an ASCII file format for an external function to generate imaging requests for the Satellite Operating Agencies (SOAs). The SOAs may accept, modify, or reject any of these orders. CPS ingests the SOA order status information along with any new orders at the start of each planning session through the file ingest mechanism. Modified or rejected orders are replanned by the mission planner and the CPS system. Orders continue to be included in the planning process until they are completed or deleted.
13

CPS White Paper, 1/3/2003
1.6.2 Hardware Specification & Software Performance CPS is delivered as a complete solution, configured with software pre-installed and tested on the latest Windows workstation platform from Dell. The following performance data was generated using a Dell 340 workstation with a single 2GHz Intel Pentium 4 processor and 1GB RAM running the Windows 2000 operating system. The performance runs listed below are intended to provide a glimpse into the power of the scheduling algorithms to rapidly solve and optimize large collection problems. The software is so fast that multiple options may be defined and optimized by one operator in the time it would normally take several schedulers to find a single non-optimized solution for a much smaller target set.
Period Satellites Targets Timeslots Access Solve Total
1 Day 3 1760 2500 00:01:21 00:00:13 00:01:44
1 Day 6 1760 6240 00:02:44 00:00:30 00:03:27
7 Days 3 12100 155,400 00:59:51 00:16:37 01:20:21
7 Days 6 12100 310,800 02:05:03 00:30:02 02:43:50
Satellites is the number of satellite resources available. Targets are the individual imaging areas. Timeslots indicates the total collection opportunities (combined) for all targets. Access is the time to perform access calculations. Solve is the time required for the scheduling algorithms to optimize the scheduling solution (Multi-Pass algorithm).
1.7 Satellite Toolkit
Satellite Toolkit (STK) from Analytical Graphics is the industry leading flight dynamics computation and visualization software package and is integrated with the CPS system to provide the following functions:
• Satellite to ground station access determination • Instrument to target access determination • Target mapping and selected constraint application • GSD (resolution) and Image Quality calculations • Spacecraft attitude constraint computations • 3D analysis graphics
STK is a COTS product with a wide user base and years of industry validation. The purchase of CPS comes with required STK software, including licenses for STK PRO, AVO, and Connect modules. For additional information about STK, go the product web site at www.stk.com.
14

CPS White Paper, 1/3/2003
15
1.8 Custom Options
While the off-the-shelf Collection Planning System is a very powerful, configurable, and flexible standalone application, some customers may require customized solutions that integrate the software with legacy systems or with customer-provided dynamic satellite models for higher-fidelity planning than static models can support. Space Imaging and Orbit Logic are ready to work with customers to meet these specialized needs. Contact Tom Lewis at Space Imaging for additional information ([email protected]).









![Integrating tech in the classroom [Billups]](https://static.fdocuments.net/doc/165x107/55a5d08f1a28abda298b47fa/integrating-tech-in-the-classroom-billups.jpg)







