Circuit Network Analysis - [Chapter4] Laplace Transform
61
Network Analysis Chapter 4 Laplace Transform and Circuit Analysis Chien-Jung Li Department of Electronic Engineering National Taipei University of Technology
-
Upload
simenli -
Category
Engineering
-
view
91 -
download
3
Transcript of Circuit Network Analysis - [Chapter4] Laplace Transform
![Page 1: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/1.jpg)
Network Analysis
Chapter 4
Laplace Transform and Circuit Analysis
Chien-Jung Li
Department of Electronic Engineering
National Taipei University of Technology
![Page 2: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/2.jpg)
Derivative
2y x=
• Derivative
Isaac Newton (牛頓, 1643-1727)
Method of fluxions
流量: fluent
流數: fluxion
2y x x=i i
2y
xx
=i
iy對應x的導數(變化率)即兩個流數的比
代表對時間的微分
G. Wilhelm Leibniz (萊布尼茲, 1646-1716)dydx
yx
∆ = ∆
J-Louis Lagrange (拉格朗日, 1736-1813)
( )y f x= ( ) dyy f x
dx′ ′= =
2y x= 2y x′ =
( )2
2
d dy d yy f x
dx dx dx ′′ ′′= = =
2/61 Department of Electronic Engineering, NTUT
![Page 3: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/3.jpg)
• Operators do particular mathematical manipulations, such as
Operators
+ − × ÷
( ) ( )dy dy f x y
dx dx′ ′= = = 2 2 32
dx x x
dx=
( ) ( )2 2
2 2
d dy d y dy f x y
dx dx dx dx ′′ ′′= = = =
dD
dx≜
2 2 32x Dx x=
• Louis Arbogast (1759-1803) conceived the calculus as operational
symbols. The formal algebraic manipulation of series investigated by
Lagrange and Laplace.
2 5 320D x x=
• The derivative
nn
n
dD
dx≜
Differential operator
3/61 Department of Electronic Engineering, NTUT
![Page 4: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/4.jpg)
Differential Equations
xy e= x x xdy e De e
dx′ = = = Dy y=
Hence, we can know the solution of the equation should be of the formxy e= xy Ce=
• Oliver Heaviside (1850-1925)
Heaviside was a self-taught English electrical engineer, mathematician, and
physicist who adapted complex numbers to the study of electrical circuits,
invented mathematical techniques to the solution of differential equations
(later found to be equivalent to Laplace transforms. He changed the face of
mathematics and science for years to come.
or
C is a constant
Dy y=
kxy e= kx kx xdy e De ke
dx′ = = = Dy ky=
Similarly, we can know the solution of the equation should be of the
form
Dy ky=kxy Ce=
4/61 Department of Electronic Engineering, NTUT
![Page 5: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/5.jpg)
Solutions of the Differential Equation
• Consider the differential equation: ( )7 8 0y y y′′ ′+ − =2
2 7 8 0d d
y y ydx dx
+ − =
2 7 8 0D y Dy y+ − =
(將D視為代數)
( )2 7 8 0D D y+ − =
( ) ( ) ( )2 7 8 1 8 0D D D D+ − = − + =
Use the differential operator D:
Take this as an algebraic equation:
The solutions:
0y = or 1D = 8D = −
Dy y= 8Dy y= − xy Ae= 6xy Be−=
androots
6x xy Ae Be−= +General Solution:
put y backand
solutionsand(/or)
5/61 Department of Electronic Engineering, NTUT
![Page 6: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/6.jpg)
Fourier Transform
( ) ( ) ω∞ −
−∞= ∫
j tX f x t e dt
The usefulness of the Fourier transform is limited by a series drawback:
if we try to evaluate the Fourier integral, we find that the integral does not
converge for most signals x(t), i.e.,
( ) 0sinx t tω=
( ) 00sin j tX f t e dtωω
∞ −= ⋅∫
( ) 0 0 00 2 20
0 0
sin cossin
j t j tj t j e t e t
X t e dtω ω
ω ω ω ω ωω ωω ω
∞− −∞ − − −= ⋅ =
−∫
( ) 0 02 20
sin cosj jj e eX
ω ω ωωω ω
− ∞ − ∞− ∞ − ∞ +=
−
But what are andsin∞ cos ?∞
• The Fourier Transform
6/61 Department of Electronic Engineering, NTUT
![Page 7: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/7.jpg)
Circumvent the Problem
The evaluation of the Fourier integral would be simpler if the function x(t)
would approach zero for every large values of t. The solution of the Fourier
integral becomes possible if x(t) is multiplied by a damping function ,
where σ is a positive real number.
( ) ( )0
, t j tX f x t e e dtσ ωσ∞ − −′ = ⋅ ∫
( ) 00, sin t j tX f t e e dtσ ωσ ω
∞ − −′ = ⋅ ⋅ ∫
( ) ( ) ( ) ( )
( )0 0 0
220 0
sin cos,
j t j tj e t e tX
j
σ ω σ ωσ ω ω ω ωω σ
ω σ ω
∞− + − +− + −
′ =+ +
• The Laplace transform offers a way to circumvent this problem.
te σ−
( ) ( ) ( ) ( )
( )( )
( )
0 00 02 22 2
0 0
sin cos sin0 cos0,
j jj e e j e eX
j j
σ ω σ ωσ ω ω σ ω ωω σ
ω σ ω ω σ ω
− + ∞ − + ∞− + ∞ − ∞ − + −′ = −
+ + + +
( )( )
022
0
,Xj
ωω σω σ ω
′ =+ +
For ( ) 0sinx t tω=
( ) ( ) 0j t j
te eσ ω σ ω− + − + ∞
=∞= →
7/61 Department of Electronic Engineering, NTUT
![Page 8: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/8.jpg)
The Fourier Transform of the Sinusoid
( )( )
022
0
,Xj
ωω σω σ ω
′ =+ +
• The Fourier integral X(f) is now obtained by letting
( ) 02 20
Xωω
ω ω=
−
Thus the Fourier transform of any function x(t) is obtained by first introducing
a damping function evaluating the integral for and finally
letting .
( )- 00 1te eσσ → =≃
- te σ 0σ >0σ →
• The Fourier integral is obtained with x(t) multiplied by a damping
function:
( ),X ω σ′
8/61 Department of Electronic Engineering, NTUT
![Page 9: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/9.jpg)
Definition of the Laplace Transform
( ) ( )0
, t j tX f x t e e dtσ ωσ∞ − −′ = ⋅ ∫
( ) ( ) ( )0
, j tX f x t e dtσ ωσ∞ − +′ = ⋅∫
• Define s jσ ω= + , where s is called the complex frequency
( ) ( ) ( ),X f X j X sσ σ ω′ = + =
( ) ( )0
stX s x t e dt∞ −= ⋅∫
This is the definition of
the Laplace transform
• As we said, the evaluation of the Fourier integral would be simpler if
the function x(t) is multiplied by a damping function , where σ is a
positive real number.
te σ−
• The Fourier transform can be obtained by letting , i.e.
( ) ( )s j
X X sω
ω=
=
0σ → s jω=
9/61 Department of Electronic Engineering, NTUT
![Page 10: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/10.jpg)
Historical Points of View (I)
Watt 1736-1819Coulomb 1736-1806
Ampere 1775-1836Volta 1745-1827
Ohm 1789-1854
Kirchhoff 1824-1887
1600 19001700
Joule 1818-1889
1609
顯微鏡1752
避雷針1710
溫度計1769
蒸汽機1791
輪船1800
電池
1804
鐵路機車
1807
蒸汽船
1821
電動機
1826
內燃機
1831
發電機
1824
都卜勒效應
1836
縫紉機
1843
冰淇淋
1801
紡織機
1870
汽油引擎
1877
留聲機麥克風
1889
汽車
1893
無線電
Department of Electronic Engineering, NTUT10/61
Lagrange 1736-1813
Newton 1643-1727Leibniz 1646-1716
Fourier 1768-1830Laplace 1749-1827
Arbogast 1759-1803Heaviside 1850-1925
1800
1657
擺鐘1679
壓力鍋1643
晴雨表
1609
克卜勒行星運動定律
1610
伽利略提出太陽自轉
1621
斯耐爾折射定律
1687
牛頓自然哲學的數學原理
(萬有引力, 三大運動定律)
1690
惠更斯以太說
1652
富蘭克林論電與電氣相同
1685
庫侖定律
![Page 11: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/11.jpg)
Historical Points of View (II)
1774-1783
美國獨立戰爭
1774
大陸會議
1776
傑佛遜獨立宣言,
美國成立
1789
美國憲法生效華盛頓第一任總統
1861
南北戰爭爆發
1865
林肯遇刺身亡
1662-1722 康熙 1795-1908 嘉慶, 道光, 咸豐,同治, 光緒1722-35-95 雍正, 乾隆
1754 吳敬梓歿
1763 曹雪芹歿
1796-1804
白蓮教起義1840-42 第一次
鴉片戰爭
1851 洪秀全成立太平天國
1852 曾國藩成立湘軍
1856-60 第二次鴉片戰爭, 英法
聯軍
1861 慈禧垂簾聽政
1865 李鴻章成立江南製造局
1866左宗棠成立福州造船廠
1885劉銘傳任台灣巡撫
1894中日甲午戰爭
1898譚嗣同,
康有為戌戊變法
1900義和團起義
1784 鹿港開港
1863 雞籠開港
1864 打狗開港
1874 牡丹社事件
1884 中法戰爭, 砲轟基隆
1885 台灣脫離福建省, 為台灣省
1887 台灣鐵路
1760 英國工業革命開始
1789-1794 法國大革命
1795 法王路易十六上斷頭台
1799-1814 拿破崙王朝
1871 德意志帝國成立 1889 巴黎艾菲爾鐵塔
1895馬關條約
Department of Electronic Engineering, NTUT11/61
1600 19001700 1800
-1644明朝末
1644
吳三桂降清
1644-62南明
1650
鄭成功居廈門與金門抗清
1661
鄭成功攻台灣逐荷蘭人
1636 大清國皇太極稱帝
1683
施琅攻台鄭克塽降清
1600
英國東印度公司
1600~
英法殖民者於北美拓殖
1624 荷蘭占台
![Page 12: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/12.jpg)
Definition of The Laplace Transform
Department of Electronic Engineering, NTUT
( ) ( )f t F s = L
( ) ( ) -1 F s f t = L
( ) ( )0
stF s f t e dt∞
−= ∫
• The mathematical definition of the Laplace transform is
One-sided or Unilateral Laplace transform
• The process of transformation is indicated symbolically as
• The process of inverse transformation is indicated symbolically as
12/61
![Page 13: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/13.jpg)
Basic Theorems of Linearity
( ) ( ) ( )Kf t K f t KF s = = L L
( ) ( ) ( ) ( ) ( ) ( )1 2 1 2 1 2f t f t f t f t F s F s + = + = + L L L
( ) ( ) ( ) ( )1 2 1 2f t f t F s F s ⋅ ≠ ⋅ L
• Consider the Laplace transform of a function f(t) is
( ) ( )f t F s = L
Let K represent an arbitrary constant, we have
Let f1(t) and f2(t) represent any arbitrary functions, we have
• It is mentioned here that
Department of Electronic Engineering, NTUT13/61
![Page 14: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/14.jpg)
Step Function
( ) 0 for 0u t t= <1 for 0t= >
( ) ( )U s u t = L
• The unit step function u(t) can be used to describe the process of
“turning on” a DC level at t=0.
1t
( )u t
( ) ( ) 0 for 0u t Ku t t′ = = < for 0K t= >
K
t
( )u t′
( ) ( )U s u t′ ′ = L
0
1ste dts
∞ −= =∫ 0
st KKe dt
s
∞ −= =∫
Department of Electronic Engineering, NTUT14/61
![Page 15: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/15.jpg)
Exponential Function
( )0
t t stX s e e e dtα α∞− − − = = ∫L
• The Laplace transform of the exponential function .
for 0α >1
t
( ) tx t e α−=
for 0α <1
t
( ) tx t e α−=
( )0
1s te dts
α
α∞ − += =
+∫
te α−
Department of Electronic Engineering, NTUT15/61
![Page 16: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/16.jpg)
Sine and Cosine Functions
• The Laplace transform of the sinusoid .0cos tω
( )0 0
0 00
0 0 0 0
1sin
2 2
j t j tj t j tst st st ste e
F s te dt e dt e e dt e e dtj j
ω ωω ωω
∞ ∞ ∞ ∞−−− − − − −= = = −
∫ ∫ ∫ ∫
( ) ( )
( )( )
( )( )0 0 0 0
0 00 0 0 0
1 1 1 12 2
s j t s j t s j t s j te dt e dt e ej j s j s j
ω ω ω ω
ω ω
∞ ∞∞ ∞− − − + − − − +
= − = − − − − +
∫ ∫
( ) ( )( )0 0 0
2 2 2 20 0 0 0
1 1 1 12 2
s j s j
j s j s j j s s
ω ω ωω ω ω ω
+ − −= − = = − + + +
( )0 0
0 00
0 0 0 0
1cos
2 2
j t j tj t j tst st st ste e
F s te dt e dt e e dt e e dtω ω
ω ωω∞ ∞ ∞ ∞−
−− − − − += = = +
∫ ∫ ∫ ∫
( ) ( )
( )( )
( )( )0 0 0 0
0 00 0 0 0
1 1 1 12 2
s j t s j t s j t s j te dt e dt e es j s j
ω ω ω ω
ω ω
∞ ∞∞ ∞− − − + − − − +
= + = + − − − +
∫ ∫
( ) ( )( )0 0
2 2 2 20 0 0 0
1 1 1 12 2
s j s j ss j s j s s
ω ωω ω ω ω
+ + −= + = = − + + +
• The Laplace transform of the sinusoid .0sin tω
Department of Electronic Engineering, NTUT16/61
![Page 17: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/17.jpg)
Damped Sinusoidal Functions
( ) ( )
0 0
s tt stF s e e dt e dtαα∞ ∞
− +− −= =∫ ∫
( )( )
( )0
1 1s tes s
α
α α∞− += =
− + +
1
( )0cos where 0te tα ω α− >
te α−
( ) ( )
( )0 0 2 20 0 0
cos cos s tt st sF s te e dt te dt
s
αα αω ωα ω
∞ ∞− +− − += = =
+ +∫ ∫
( ) ( )
( )0
0 0 2 20 0 0
sin sin s tt stF s te e dt te dts
αα ωω ωα ω
∞ ∞− +− −= = =
+ +∫ ∫
• The Laplace transform of the damped function .te α−
• The Laplace transform of the damped sine function .0sinte tα ω−
• The Laplace transform of the damped cosine function .0coste tα ω−
Department of Electronic Engineering, NTUT17/61
![Page 18: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/18.jpg)
Transformation Pairs Encountered in Circuit Analysis
1 ( )u t1s
te α− 1s α+
0sin tω
0cos tω
0sinte tα ω−
( )2 20
s
s
αα ω
++ +
2
1s
t
1
!n
ns +
nt
t ne tα−
( ) 1
!n
n
s α ++
( )tδ 1
( )f t ( ) ( )F s f t = L
or
02 2
0sω
ω+
2 20
ss ω+
( )02 2
0s
ωα ω+ +
0coste tα ω−
( )f t ( ) ( )F s f t = L
Department of Electronic Engineering, NTUT18/61
![Page 19: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/19.jpg)
Transform Example
( ) 4 210 5 12sin3 4 cos5t tf t e t e t− −= + + +
( ) ( )( )22 2 2
4 210 5 12 34 3 2 5
sF s
s s s s
+⋅= + + ++ + + +
( )2 2
4 210 5 364 9 4 29
s
s s s s s
+= + + +
+ + + +
• Find the Laplace transform of f(t):
<Sol.>
( ) 4 210 5 12sin3 4 cos5t tf t e t e t− −= + + +
constant damped sinusoid damped cosine
Department of Electronic Engineering, NTUT19/61
![Page 20: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/20.jpg)
OperationOperationOperationOperation f(t)f(t)f(t)f(t) F(s)F(s)F(s)F(s)
Laplace Transform Operations
( )f t′ ( ) ( )0sF s f−
( )0
tf t dt∫
( )F s
s
( )te f tα− ( )F s α+
( ) ( )f t T u t T− − ( )sTe F s−
( )0f ( )lims
sF s→∞
( )limt
f t→∞
( )0
lims
sF s→
poles of sF(s) must be in left-hand
half-plane. (stable)
Differentiation
Integration
Multiplication byte α−
Time shifting
(Frequency shifting)
Initial value theorem
(初值定理)
Final value theorem
(終值定理)
Department of Electronic Engineering, NTUT20/61
![Page 21: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/21.jpg)
Differentiate Operation
( ) ( )0
stF s f t e dt∞
−= ∫
• If the Laplace transform of f(t) is F(s), prove that Laplace transform of
f’(t) is sF(s)-f(0).
( ) ( )0 0
st stdf tf t e dt e dt
dt
∞ ∞− −′ =∫ ∫
Let ,stu e−= and( )df t
dt dvdt
= ( )v f t=
( ) ( ) ( ) ( ) ( ) ( )0 00
0
st st st st stdf te dt f t e f t de f t e s f t e dt
dt
∞ ∞ ∞∞− − − − − = − = − − ⋅ ∫ ∫ ∫
( ) ( ) ( ) ( ) ( )0
00 0s s stf e f e s f t e dt sF s f
∞− ⋅∞ − ⋅ − = ∞ − + = − ∫
Department of Electronic Engineering, NTUT21/61
![Page 22: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/22.jpg)
Use Differential Operation to Find the Transform of Sinusoid
( ) 02 2
0
F ss
ωω
=+
( ) 0sinf t tω=
( ) 0 0cosf t tω ω′ =
( ) ( ) ( ) 02 2
0
0 0s
f t sF s fs
ωω
′ = − = − +L
[ ] [ ] 00 0 0 0 2 2
0
cos coss
t ts
ωω ω ω ωω
= =+
L L
[ ] 2 2coss
ts
ωω
=+
L
• Let and its Laplace transform is know as .
Find the Laplace transform of by using the differential
operation.0cos tω
( ) 0sinf t tω=
Department of Electronic Engineering, NTUT22/61
![Page 23: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/23.jpg)
Use Integral Operation to Find the Transform of Ramp Function
( ) 1f t = ( ) 1F s
s=
( ) ( )0 0
1t t
x t f t dt dt t= = =∫ ∫
( ) ( ) ( )20
1 1 1t F sx t f t dt
s s s s = = = =
∫L L
( ) ( ) [ ] 2
1X s x t t
s = = = L L
( ) 1f t =• Let and its Laplace transform is know as .
Find the Laplace transform of the ramp function by using the
integral operation.
( )x t t=
( ) 1F s
s=
Department of Electronic Engineering, NTUT23/61
![Page 24: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/24.jpg)
Degree or Order
( ) ( )( )
N sF s
D s=
( ) 11 0
n nn nN s a s a s a−
−= + + +⋯
( ) 11 0
m mm mD s b s b s b−
−= + + +⋯
( ) ( ) ( ) ( )5 4 3 2
2 2
19 160 1086 3896 8919 10440
4 9 4 29
s s s s sF s
s s s s s
+ + + + +=+ + + +
order = m (means m roots)
order = n (means n roots)
• Most transforms of interest in circuit analysis turn out to be expressed
as ratios of polynomials in the Laplace variables s. Define the
transform function F(s) as
Numerator polynomial
Denominator polynomial
Department of Electronic Engineering, NTUT24/61
![Page 25: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/25.jpg)
Zeros and Poles
( ) 0zN s = ( ) 0zF s =
( ) 0pD s = ( )pF s = ∞
( ) ( )( )
N sF s
D s=• For
ZerosZerosZerosZeros of F(s): roots of the numerator polynomial N(s)
PolesPolesPolesPoles of F(s): roots of the denominator polynomial D(s)
( ) 11 0
m mm mD s b s b s b−
−= + + +⋯ Denominator polynomial
can also be completely specified by its roots except for a constant
multiplier mb in factored form as
( ) ( ) ( ) ( )1 2m mD s b s s s s s s= − − −⋯
Department of Electronic Engineering, NTUT25/61
![Page 26: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/26.jpg)
Classification of Poles
• The poles can be classified as either real, imaginary, or complex.
• An imaginary or complex pole is always accompanied by its complex
conjugate, i.e., jy is accompanied (-jy) and (x+jy) is with (x-jy).
x jy x+jy
• The poles can also be classified according to their order, which is the
number of times a roots is repeated in the denominator polynomial
(重根).
• The first-order (or simple-order) root is which the root appears only
once. Higher-order roots are referred to as multiple-order roots.
• The roots of second-order equations may be either real or complex. For
third- and higher-degree equations, numerical methods must often be
used.
Department of Electronic Engineering, NTUT26/61
![Page 27: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/27.jpg)
Example – Inverse Laplace Transform
( ) 2
10 15 203
F ss s s
= + ++
( ) 310 15 20 tf t t e−= + +
( ) 2
8 3025
sF s
s+=+
( ) 2 2 2 2
58 6
5 5s
F ss s
= ++ +
( ) 8cos5 6sin5f t t t= +
( ) ( )( )
( )( ) ( )2 2 22 2 2
2 3 20 32 26 52 4
6 34 3 25 3 5 3 5
s ssF s
s s s s s
+ + ++= = = ++ + + + + + + +
( ) 3 32 cos5 4 sin5t tf t e t e t− −= +
• Find the inverse Laplace transform of F(s):
<Sol.>
• Find the inverse Laplace transform of F(s):
<Sol.>
• Find the inverse Laplace transform of F(s):
<Sol.>
( ) 2
2 266 34
sF s
s s+=
+ +
Department of Electronic Engineering, NTUT27/61
![Page 28: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/28.jpg)
Example – Classify the Poles
( ) ( )( ) ( ) ( ) ( )2 2 2 23 2 16 6 34 8 16
N sF s
s s s s s s s s=
+ + + + + + +
9 poles 1 2 9, , ,s s s⋯
1 0s = 2
3 9 81
2s
− + −= = − 3
3 9 82
2s
− − −= = −
4 4s j= + 5 4s j= −
6
6 36 1363 5
2s j
− + −= = − − 7 3 5s j= − +
8
8 64 644
2s
− + −= = − 9
8 64 644
2s
− − −= = −
Real, 1st order (3 poles): s1, s2, s3
Imaginary, 1st order (2 poles): s4, s5
Complex, 1st order (2 poles): s6, s7
Real, 2nd order (2 poles): s8, s9
• Given F(s):
and where N(s) is not specified but known that no roots coincide with
those of D(s). Classify the poles.
<Sol.>
Department of Electronic Engineering, NTUT28/61
![Page 29: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/29.jpg)
Inverse Laplace Transform Step 1
• For the purpose of inverse transformation, poles will be classified in 4
categories
1. First-order real poles
2. First-order complex poles
3. Multiple-order real poles
4. Multiple-order complex poles
(purely imaginary poles will be considered as a special case of complex poles with zero real part)
• Step 1: Check Poles
( ) ( ) ( )2 2
50 75
3 2 4 20
sF s
s s s s
+=+ + + +
( ) ( ) ( )2
50 75
1 2 4 20
s
s s s s
+=+ + + +
real real complex conjugate
Department of Electronic Engineering, NTUT29/61
![Page 30: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/30.jpg)
Inverse Laplace Transform Step 2 (I)
• Step 2: Partial Fraction Expansion
( ) ( ) ( ) ( )2
50 75
1 2 4 20
sF s
s s s s
+=+ + + +
( ) ( ) ( )1 2 1 2
21 2 4 20
A A B s Bs s s s
+= + ++ + + +
A1,A2,B1,B2 are constants to be determined.
• Note that the single-pole denominator terms require only a constant in the
numerator, but the quadratic term requires a constant plus a term
proportional to s.
• Various procedures exist for determining the constants, but the results can
always be checked by combining back over a common denominator of
necessary to see if the original function is obtained.
Department of Electronic Engineering, NTUT30/61
![Page 31: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/31.jpg)
Inverse Laplace Transform Step 2 (II)
( ) ( ) ( ) ( )1 2 1 2
21 2 4 20
A A B s BF s
s s s s
+= + ++ + + +
( ) ( )2 21 2 sin 4t t tf t Ae A e Be t θ− − −= + + +
B and are determined form B1 and B2.
• A first-order real pole corresponds to an exponential time response
term.
• A quadratic factor with complex poles corresponds to a damped
sinusoidal time response term. Said differently, a pair of complex
conjugate poles corresponds to a damped sinusoidal time response
term.
• The inverse transform of :
θ
Department of Electronic Engineering, NTUT31/61
![Page 32: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/32.jpg)
General Algorithm – Find Coefficients
( ) ( )( ) ( ) ( ) ( ) ( )1
2 2 21 2 1 1 2 2r r rk R R
AF s
s s s s a s b s a s b s a s bα α α=
+ + + + + + + + +⋯ ⋯
1 2, , ,r r rkα α α− − −⋯ ( ) ( ) ( )1 1 2 2, , , R Rj j jα ω α ω α ω− ± − ± − ±⋯
( ) ( ) ( ) ( ) ( ) ( ) ( )1 2 1 2e e ek s s sRf t f t f t f t f t f t f t= + + + + + + +⋯ ⋯
( ) ktek kf t A e α−=
( ) ( )k
k k sA s F s
αα
=−= +
( ) ( )sinRtsR R R Rf t B e tα ω θ−= +
( ) ( )21R
R R
jR R R R rR
R s j
B e B s a s b F sθ
α ω
θω
=− +
= ∠ = + +
• Give F(s) in the factored form:
• The corresponding inverse transform:
coeff. coeff.
Department of Electronic Engineering, NTUT32/61
![Page 33: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/33.jpg)
Example
( ) 2
6 427 10
sF s
s s+=
+ +
( ) ( )( ) ( )
6 7
2 5
sF s
s s
+=
+ +
( ) ( ) ( ) 2 51 2 1 2
t te ef t f t f t Ae A e− −= + = +
( ) ( ) ( )( )
( )( )1 2
2
6 7 6 2 72 10
5 2 5ss
sA s F s
s=−=−
+ − += + = = =
+ − +
( ) ( ) ( )( )
( )( )2 5
5
6 7 6 5 75 4
2 5 2ss
sA s F s
s=−=−
+ − += + = = = −
+ − +
( ) 2 510 4t tf t e e− −= −
• Find the inverse Laplace transform of F(s):
<Sol.>
Department of Electronic Engineering, NTUT33/61
![Page 34: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/34.jpg)
Example
( )2
3 2
10 42 244 3
s sF s
s s s+ +=
+ +
( ) ( ) ( )210 42 24
1 3s s
F ss s s
+ +=+ +
( ) 31 2 3
t tf t A A e A e− −= + +
( ) ( )2
1
0
10 42 24 248
1 3 1 3s
s sA
s s=
+ += = =+ + ⋅
( )2
2
1
10 42 24 10 42 244
3 1 2s
s sA
s s=−
+ + − += = =+ − ⋅
( ) ( )2
3
3
10 42 24 90 126 242
1 3 2s
s sA
s s=−
+ + − += = = −+ − ⋅ −
( ) 38 4 2t tf t e e− −= + −
• Find the inverse Laplace transform of F(s):
<Sol.>
Department of Electronic Engineering, NTUT34/61
![Page 35: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/35.jpg)
Example
( ) ( )( ) ( )2
20 2
1 2 5
sF s
s s s s
+=
+ + +
( ) ( ) ( ) ( ) ( )1 2 1 2 sin 2t te e sf t f t f t f t A A e Be t θ− −= + + = + + +
( )( )( )1 2
0
20 2 20 28
1 51 2 5s
sA
s s s=
+ ⋅= = =⋅+ + +
( )( )2 2
1
20 2 20 15
1 42 5s
sA
s s s=−
+ ⋅= = = −− ⋅+ +
( ) ( ) ( )( )
( )( ) ( )
2
1 2 1 2
20 2 10 1 21 12 5
2 2 1 1 2 2s j s j
s jB s s F s
s s j jθ
=− + =− +
+ +∠ = + + = =
+ − +
( )( ) ( )
10 2.2361 63.4355 143.13
2.2361 116.565 2 90
⋅ ∠= = ∠ −
∠ ∠
( ) ( )8 5 5 sin 2 143.13t tsf t e e t− −= − + −
• Find the inverse Laplace transform of F(s):
<Sol.>
Department of Electronic Engineering, NTUT35/61
![Page 36: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/36.jpg)
Example
( ) ( ) ( )2 2
100
4 2 10
sF s
s s s=
+ + +
( ) ( ) ( )1 2s sf t f t f t= +
( ) ( )01 1 1sin 2t
sf t B e t θ−= + ( )1 1sin 2B t θ= +
( ) ( )2 2 2sin 3tsf t B e t θ−= +
( ) ( ) ( )( )
21 1 2
2 2
50 21 1 1004
2 2 2 10 4 10 4s j s j
jsB s F s
s s jθ
= =
∠ = + = =+ + − + +
( ) ( ) ( )( )
22 2 22
1 3 1 3
33.33 1 31 1 1002 10 14.6176 127.875
3 3 4 1 3 4s j s j
jsB s s F s
s jθ
=− + =− +
− +∠ = + + = = = ∠ −
+ − + +
• Find the inverse Laplace transform of F(s):
<Sol.>
100 9013.8675 56.3099
7.2111 33.6901∠= = ∠
∠
( ) ( ) ( )13.8675sin 2 56.3099 14.6176 sin 3 127.875tsf t t e t−= + + −
Department of Electronic Engineering, NTUT36/61
![Page 37: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/37.jpg)
Inverse Transform of Multiple-order Poles (I)
• Algorithm for Multiple-order Real Poles
( ) ( )( )i
Q sF s
s α=
+( ) ( ) ( )i
Q s s F sα= +
roots@i s α= −
The time function due to the pole of order i with a value will be
the form:
α−
( ) ( ) ( ) ( )1 2
1 2
1 ! 2 ! !
i i i ktk
m i
C t C t C tf t C e
i i i kα
− − −−
= + + + + + − − − ⋯ ⋯
A give coefficient Ck can be determined from the expression:
( ) ( )1
1
11 !
k
k ks
dC Q s
k ds α
−
−=−
=−
Department of Electronic Engineering, NTUT37/61
![Page 38: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/38.jpg)
Inverse Transform of Multiple-order Poles (II)
• For a first-order real pole:
( )0 1
110!
t tm
C tf t e C eα α
−− −= =
( ) ( ) ( )1
10! s s
C Q s s F sα α
α=− =−
= = +
• For second-order real poles:
( ) ( ) ( )2Q s s F sα= +
( ) ( )1 2t
mf t C t C e α−= +
( )1 sC Q s
α=−=
( )2
s
dQ sC
dsα=−
=
Department of Electronic Engineering, NTUT
For complex poles, find the complex coefficients Ck with s jα ω= − ±
38/61
![Page 39: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/39.jpg)
s-domain Circuit Analysis
Time domain circuit for which a general solution is desired
Convert circuit to s-domain form
Solve for desired response in s-domain
Determine inverse transform of desired response
Desired time domain response
Department of Electronic Engineering, NTUT39/61
![Page 40: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/40.jpg)
Transform Impedances (I)
Passive
RLC Circuit
( )i t
( )v t Z(s)
( )I s
( )V ss-domain
( ) ( )I s i t = L
( ) ( )V s v t = L
( ) ( )( )
V sZ s
I s=
( ) ( )( )( )
1 I sY s
Z s V s= =
Transform impedance Z(s)
Transform admittance Y(s)
Department of Electronic Engineering, NTUT40/61
![Page 41: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/41.jpg)
Transform Impedances (II)
( )i t
( )v t R
( )i t
( )v t
( )i t
( )v t
C
L
( )V s
( )I s
R
1sC
( )V s
( )I s
sL( )V s
( )I s
R
C
L
( )V ω
( )I ω
R
ω1
j C( )V ω
( )I ω
ωj L( )V ω
( )I ω
0σ →
0σ →
0σ →
Department of Electronic Engineering, NTUT41/61
![Page 42: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/42.jpg)
Example – Transform Impedance
1 kR = Ω
0.5 FC µ=
30 mHL =
1 kΩR =
( )6
6
1 1 2 10
0.5 10sC ss −
⋅= =⋅
( )330 10 0.03sL s s−= ⋅ =
Department of Electronic Engineering, NTUT42/61
![Page 43: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/43.jpg)
Models for Initially Charged Capacitor
0VC+
− 0Vs
1sC
+−
0CV1sC
0 60 VV =0.2 FC µ=+
−60s
650 10s⋅
+−
612 10−⋅650 10
s⋅
Thevenin’s equivalent circuit Norton’s equivalent circuitInitially charged capacitor
Example:
Department of Electronic Engineering, NTUT43/61
![Page 44: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/44.jpg)
Models for Initially Fluxed Inductor
0IL0LI
sL
+−
0Is
sL
0 0.4 AI =50 mHL =0.02
0.05s
+−
0.4s0.05s
Thevenin’s equivalent circuit Norton’s equivalent circuitInitially fluxed inductor
Department of Electronic Engineering, NTUT44/61
![Page 45: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/45.jpg)
Complete Circuit Models
1. Transform the complete circuit from the time-domain to the s-domain
( ) ( )v t V s→ ( ) ( )i t I s→
L sL→1
CsC
→
00
VV
s→ 0
0
II
s→
2. Solve for the desired voltages currents using the s-domain model.
3. Using inverse Laplace transform to determine the corresponding time-
domain forms for the voltages or currents of interest.
Department of Electronic Engineering, NTUT45/61
![Page 46: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/46.jpg)
Example (I)
20 V+−10cos3t +
−
0t =
2 H1
F4 3 Ω 4 Ω 5 H
+
−8 V
1 F
6( )1i t ( )2i t
20s
+−2
109
ss +
+−
2s4s 3 4 5s
8s
6s( )1I s ( )2I s+
−
Transform from time-domain to s-domain
Department of Electronic Engineering, NTUT46/61
![Page 47: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/47.jpg)
Example (II)
20s
+−2
109
ss +
+−
2s4s 3 4 5s
8s
6s( )1I s ( )2I s+
−
( ) ( ) ( ) ( ) ( )1 1 1 1 22
10 4 6 82 3 0
9s
sI s I s I s I s I ss s s s−
+ + + + − + = +
( ) ( ) ( ) ( )2 1 2 2
8 6 204 5 10 0I s I s I s sI s
s s s−
+ − + + + + =
Mesh 1:
Mesh 2:
Solve for I1(s) and I2(s)
Apply the circuit laws:
Department of Electronic Engineering, NTUT47/61
![Page 48: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/48.jpg)
General Forms for Solutions (I)
( ) ( ) ( )n fy t y t y t= +
• Natural and Forced Responses
Let represent some arbitrary general circuit response (either a voltage
or current). When the circuit is excited by one or more sources, a general
response may be represented by the sum of two responses as follows:
( )y t
( )y t
Natural response Forced response
• Natural Response
The form of the natural response is determined by the circuit parameter,
i.e., if the circuit has a time constant of 2 seconds, corresponding to an
exponential , such a term will appear in the response when the circuit
is excited by any type of source.
2te−
• Force Response
The form of the forced response is determined by the excitation source(s),
i.e., if a circuit is excited by a sinusoid having a frequency of 5 kHz, the
general response will always contain a sinusoid with a frequency of 5 kHz.
Department of Electronic Engineering, NTUT48/61
![Page 49: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/49.jpg)
General Forms for Solutions (II)
( ) 10sin1000sv t t=
( ) ( )22 3 4sin 1000 30t ti t e e t− −= − + +
( ) ( ) ( )4sin 1000 30ss fi t i t t= = + ( ) ( ) 22 3t tt ni t i t e e− −= = −
( ) ( ) ( )t ssy t y t y t= +
• Transient and Steady-state Responses
Transient response Steady-state response
Frequently, transient response and natural response are considered to be
equivalent, and steady-state response and forced response are considered
to be equivalent. The terms transient and steady-state relate to the
common case where the natural response is transient in nature and
eventually vanishes, whereas the forced response continuous as a steady-
state condition indefinitely.
Example:
Department of Electronic Engineering, NTUT49/61
![Page 50: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/50.jpg)
First-Order Circuits
• First-order Circuit with Arbitrary Input
( ) t tny t Ke Keτ α− −= =
For first-order circuits, the natural response will always be an exponential
term of the form:
( )ny t
K is a constant
is the time constantτis the damping factor1α τ=
Since the exponential term approaches zero as time increases, it is proper to
designate the natural response as a transient response whenever the forced
response continuous indefinitely.
Department of Electronic Engineering, NTUT50/61
![Page 51: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/51.jpg)
Example of a First-Order Circuit (I)
40sin4t +−
0t =
4 Ω
( )i t1
F12
+
−( )cv t
2
16016s +
+−
4 Ω
( )I s12s
+
−( )cV s
( ) ( )2
160 124 0
16I s I s
s s− + + =
+
( ) ( ) ( )2
40
3 16
sI s
s s=
+ +
( ) ( )34.8 8sin 4 36.87ti t e t−= − + +
( ) ( ) ( ) ( )2
12 480
3 16CV s I ss s s
= =+ +
( ) ( )319.2 24sin 4 53.13tCv t e t−= + −
• Use Laplace transform techniques, determine the current and
voltage for .( )i t
( )Cv t 0t >
Transform from time-domain to s-domain
Apply KVL:
Transient response Steady-state response
Transient response Steady-state response
Time constant = 1/3 = RC
Damping factor = 3
Department of Electronic Engineering, NTUT51/61
![Page 52: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/52.jpg)
Example of a First-Order Circuit (II)
( ) ( )306 3 0
1I s s I s
s− + + ⋅ =
+
( ) ( ) ( )10
1 2I s
s s=
+ +
( ) 210 10t ti t e e− −= −
• Use Laplace transform techniques, determine the for .( )i t 0t >
Transform from time-domain to s-domain
Apply KVL:
Forced response Natural response
Time constant = 1/2 = L/R
Damping factor = 2
30 te− +−
0t =
6 Ω
( )i t 3 H
301s +
+−
6
( )I s 3 s
Department of Electronic Engineering, NTUT52/61
![Page 53: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/53.jpg)
Second-Order Circuits
( ) ( ) ( )10iV
sLI s RI s I ss sC
− + + + =
( )2 1
iVLI sR
s sL LC
=+ +
( ) ( )2
11
i
C
VLCV s I s
RsC s s sL LC
= = + +
• Second-order circuits are of special interest because they are capable
of displaying, on a simple scales, the types of responses that appear
in circuits of arbitrary order. In fact, second-order circuits and systems
occur frequently in practical applications, so their behavior is subject
of considerable interest.
• Series RLC Circuit
iV +−
0t =
R
( )i t
+
−( )cv t
L
C
iVs
+−
R
( )I s
+
−( )CV s
sL
1sC
Department of Electronic Engineering, NTUT53/61
![Page 54: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/54.jpg)
3 Possible Forms of the Roots
21
22
12 4
s R Rs L L LC
= − ± −
• The roots of the second-order circuit
• Three possibilities for the roots s1 and s2
Overdamped Case (the roots are real and different) :2
2
14RL LC
>
Critically Damped Case (the roots are real and equal) :2
2
14RL LC
=
Underdamped Case (the roots are complex) :2
2
14RL LC
<
Department of Electronic Engineering, NTUT54/61
![Page 55: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/55.jpg)
Overdamped Case (Series RLC)
( ) ( )( )1 2
iVLI s
s sα α=
+ +
( ) ( ) ( )1 2
i
C
VLCV s
s s sα α=
+ +
( ) 1 20 0
t ti t A e A eα α− −= −
( ) 1 21 2
t tC iv t V Ae A eα α− −= + +
• In the overdamped case, the two poles are real and different. Assume
that the poles are and , the forms for I(s) and VC(s)
can be expressed as1 1s α= − 2 2s α= −
• The inverse transforms are of the forms
The natural response consists of two exponential
terms, each having a different damping factor or
time constant. The forced response for the current
is zero and for the capacitor voltage is the
constant final voltage across the capacitor.
Department of Electronic Engineering, NTUT55/61
![Page 56: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/56.jpg)
Critically Damped Case (Series RLC)
( )( )2
iVLI s
s α=
+
( )( )2
i
C
VLCV s
s s α=
+
( ) 20
t Rt LiVti t C te e
Lα− −= =
( ) ( ) 21 2
Rt LC iv t V C t C e−= + +
• In the critically damped case, the two poles are real and equal.
Assume that the poles are , the forms for I(s) and VC(s)
can be expressed as1 2s s α= = −
The damping factor:2RL
α =
• The inverse transforms are of the forms
0 iC V L=
The most significant aspect of the natural
response function for the critically damped case is
the form. Although the t factor increases
with increasing t, the decreases at a faster
rate, so the product eventually approaches zero.
tte α−
tte α−
Department of Electronic Engineering, NTUT56/61
![Page 57: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/57.jpg)
Underdamped Case (Series RLC)
1 ds jα ω= − + 1 ds jα ω= − −
2RL
α =2
12d
RLC L
ω = −
( )( )2 2
i
d
VLI s
s α ω=
+ +( )
2 1
i
C
VLCV s
Rs s s
L LC
= + +
( ) sintid
d
Vi t e t
Lα ω
ω−=
( ) ( )sintC i dv t V Be tα ω θ−= + +
• In this case, the two poles are complex and denoted as
• The forms for I(s) and VC(s) can be expressed as
and
where and
is called the damped
natural oscillation frequencydω
and
• The inverse transforms are of the forms
The natural response is oscillatory. Depending on
the value of , this response may damp out very
quickly, or it may continue for a reasonable period
of time.
α
Department of Electronic Engineering, NTUT57/61
![Page 58: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/58.jpg)
Comparison of Response Forms (I)
Overdamped Case :
Critically Damped Case :
Underdamped Case :
( ) 1 20 0
t ti t A e A eα α− −= −
( ) 20
t Rt LiVti t C te e
Lα− −= =
( ) sintid
d
Vi t e t
Lα ω
ω−=
Department of Electronic Engineering, NTUT58/61
( )i t
t
Underdamped
Critically damped
Overdamped
![Page 59: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/59.jpg)
Comparison of Response Forms (II)
Overdamped Case :
Critically Damped Case :
Underdamped Case :
( ) 1 21 2
t tC iv t V Ae A eα α− −= + +
( ) ( ) 21 2
Rt LC iv t V C t C e−= + +
( ) ( )sintC i dv t V Be tα ω θ−= + +
Department of Electronic Engineering, NTUT59/61
overshoot
Underdamped
Critically damped
Overdamped
Final level= iV
( )Cv t
t
![Page 60: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/60.jpg)
Example (I)
40 ViV = +−
0t =
400 Ω
( )i t
+
−( )Cv t
2 H
0.5 Fµ
• Use Laplace transform techniques, determine the current and
voltage for .( )i t
0t >( )Cv t
40s
+−
400
( )I s
+
−( )CV s
2s
62 10s
⋅
( )6 2 62 10 2 400 2 10
2 400s s
Z s ss s
⋅ + + ⋅= + + =
( ) ( )( ) 2 6
40
2 400 2 10
V s sI ss sZ s
s
= =+ + ⋅
( )22 6 2
20 20200 10 100 994.987s s s
= =+ + + +
( ) ( )1000.0201008 sin 994.987ti t e t−= ⋅
( ) ( ) ( ) ( )6
2 6
40 10
200 10V s I s Z s
s s s
⋅= =+ +
( )( )
−= +
× −
10040 40.2015
sin 994.987 95.7392
tCv t e
t
Department of Electronic Engineering, NTUT60/61
![Page 61: Circuit Network Analysis - [Chapter4] Laplace Transform](https://reader030.fdocuments.net/reader030/viewer/2022012321/55ca3f16bb61eb15518b4621/html5/thumbnails/61.jpg)
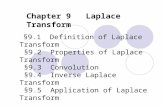
Example (II)
( ) ( )−= + ⋅ − 10040 40.2015 sin 994.987 95.7392
tCv t e t
( ) ( )1000.0201008 sin 994.987ti t e t−= ⋅
Department of Electronic Engineering, NTUT61/61
( ), mAi t( ), VCv t
20
10
, mst10
20
30
60
40
20
0
−20
Final voltage = 40 V
( )i t
( )Cv t