Chapter 3 : Simple Process Dynamics and Transfer Function Professor Shi-Shang Jang Department of...
57
Chapter 3 : Chapter 3 : Simple Process Simple Process Dynamics and Dynamics and Transfer Function Transfer Function Professor Shi-Shang Jang Department of Chemical Engineering National Tsing-Hua University Hsinchu, Taiwan March, 2013
-
Upload
nathan-sparks -
Category
Documents
-
view
235 -
download
1
Transcript of Chapter 3 : Simple Process Dynamics and Transfer Function Professor Shi-Shang Jang Department of...

Chapter 3 : Chapter 3 : Simple Process Simple Process Dynamics and Dynamics and Transfer FunctionTransfer Function
Professor Shi-Shang JangDepartment of Chemical EngineeringNational Tsing-Hua UniversityHsinchu, TaiwanMarch, 2013

Motive of Developing First Motive of Developing First Principle ModelsPrinciple Models
Improve understanding of the process
Train plant operating personnelDevelop a control strategy for a new
processOptimize process operating
conditions

3-1 Introduction3-1 Introduction
Theoretical (First Principle) models are developed using the principles of chemistry , physics, and biology.
Theoretical models offer process insight into process behavior, and they are applicable over wide ranges of conditions
They trend to be expensive and time-consuming to develop

TT23
TC23
Stack gases
Fuel
Air
Air
FY23
QY23
FT24
Set point
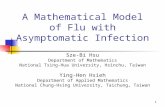
Example - Industrial Example - Industrial FurnaceFurnace
CV: temperature of the furnaceMV: fuel flow rate to the furnace
Figure 1-1

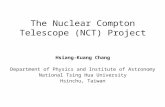
Temperature Profile of Temperature Profile of TT23TT23
0 5 10 15 20 25 30 35 40 45 50219
219.5
220
220.5
221
221.5
222
222.5
223
Time (min)

Plant Plant DynamicsDynamics
PlantMV CV
DV
time
tem
pe
ratu
re
0 1 2 3 4 5 6 7 8 9 10
80
80.2
80.4
80.6
80.8
81
81.2
81.4
time
tem
pe
ratu
re
0 10 20 30 40 50 60 70 80 90 100500
502
504
506
508
510
512
514
516
518
520
time
Flo
w
rate
0 10 20 30 40 50 60 70 80 90 10079.5
80
80.5
81
81.5
82
82.5
83
time
Flo
w
rate
0 1 2 3 4 5 6 7 8 9 1020
20.5
21
21.5
22
22.5
23
23.5
24
24.5
25

The Concept of Deviation The Concept of Deviation VariablesVariables
PlantMV CV
DV
time
tem
pe
ratu
re
time
tem
pe
ratu
re
time
Flo
w
rate
time
Flo
w
rate
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
0 1 2 3 4 5 6 7 8 9 10-0.2
0
0.2
0.4
0.6
0.8
1
1.2
0 10 20 30 40 50 60 70 80 90 100-0.5
0
0.5
1
1.5
2
2.5
3
0 10 20 30 40 50 60 70 80 90 1000
2
4
6
8
10
12
14
16
18
20
yd=y - ys

Simple SystemsSimple Systems

The Essence of Process The Essence of Process Dynamics - Dynamics - ContinuedContinuedThe feedback process control needs to
understand the relationships between CV and MV, on the other hand, feedforward process control needs to understand the relationships between DV and CV. The relationships are called process models.
For the ease of mathematical analyses, the process modeling only implements a linear model and Laplace transform instead of direct use of time domain process model. Implementation of deviation variables is needed as indicated below.

3-1 Introduction- 3-1 Introduction- ContinuedContinuedEmpirical models are obtained by fitting
experimental data.Empirical models typically do not
extrapolate well, and their range is typically small.
Empirical models are frequently used in the industrial environment since a theoretical model is basically not precisely available.

3-1 Introduction- Continued3-1 Introduction- ContinuedSemi-empirical models are a combination
of the models of theoretical and empirical models; the numerical values of the parameters in a theoretical model are calculated from experimental data.
Semi-empirical models can (i) incorporate theoretical knowledge, (ii) extrapolate wider range than empirical range, (iii) require less effort than theoretical models.

3-2 General Modeling 3-2 General Modeling Principles Principles
comsumedenergy
mass/ of ratenet
producedenergy
mass/ of ratenet
outenergy
mass/ of rate
in
mass/ of rate
y mass/energ of
onaccumulati of rate

3-2 General Modeling 3-2 General Modeling Principles:Principles:
Constitution Equations
Heat Transfer : Reaction Rate :Flow Rate : Equation of State :
Phase Equilibrium:
ThAQ
ARTE
A Cekr /0
2/1/ PCF v
nRTPV
ii Kxy

3-3 Transfer Functions - 3-3 Transfer Functions - ConventionsConventions
- on the top of a variable= steady state of a variable, example:
Capital = deviation variable, example:
Capital with (s)= Laplace transform of a variable to the deviation variable, example:
( ) ( )X t x t x
: nominal state of ( )x x t
( ) ( )X s X tL

3-3. Transfer Function3-3. Transfer Function
( )( )
( )
Y sG s
X s
• Transfer function is a mathematical representation of the relation between the input and output of a system.
• It is the Laplace transform of the output variable, y(t), divided by Laplace Transform of the input variable, x(t), with all initial conditions equal to zero.
• The term is often used exclusively to refer to linear, time-invariant systems (LTI), and non-linear, real-system are linearize to obtain their Transfer Function.
• So, Transfer Function G(s) for a system with input x(t) and output y(t) would be-

• As for previous equation, it could be said that if transfer function for the system and input to the system is known, we can obtain the output characteristics of the system.
• Transfer Function for the system could be easily obtained by dynamic study of the system and making balances for quantities like energy, mass etc.
• We take inverse Laplace Transform to obtain time-varying output characteristics of Y(s). In block diagram:
More over Transfer More over Transfer FunctionFunction
( ) ( ) ( )G s X s Y s
G (s)X(s) Y(s)

3-3 Transfer Functions –3-3 Transfer Functions – Example: Thermal Example: Thermal ProcessProcess
Rate of Energy Input- Rate of Energy Output=Accumulation
i i i
vi p i i p
d V u tf h t f h t
dt
d V C T tf C T t f C T t
dt
Inputs: f(t), Ti(t),Ts(t)Output: T(t)
Ts

3-3 Transfer Functions 3-3 Transfer Functions – – Cont.Cont.
Let f be a constant V= constant, Cv=Cp

3-3 Transfer Functions 3-3 Transfer Functions – – Cont.Cont.
(1)
0 (2)
(1)-(2)
set deviation variables ,
p i p v
p i p
p i i p v
i i i
v
p
dT tf C T t f C T t V C
dtf C T f C T
d T t Tf C T t T f C T t T V C
dtt T t T t T t T
d tV Ct
f C dt
i
i
t
d tt t
dt
Let f be a constant V= constant, Cpi=Cp
=time constant

3-3 Transfer Functions 3-3 Transfer Functions – – Cont.Cont.
Taking Laplace Transform
Consider the process input to be the inlet temperature, and the
output to be tank temperature
s 1
1
i
pi
s s s s
G ss s
where, Gp(s) is call the transfer function of the process, in block diagram:
Gp(s)i(s) (s)

Step Response of a First Step Response of a First Order SystemOrder System
632.0)1()(Notbly
1limlim
1lim)(lim
111
1
;s
0;Input Step
1
1
0
/
//11
eKA
KAss
KAsss
KAeKAt
eKAKAeKAs
KA
s
KA
ss
KAt
s
K
s
As
s
A
tAt
s
K
s
s
ts
t
tt
tt
i
i
i
LL

Process IdentificationProcess Identification
tt
et
et
yt
tyt
edt
td
ee
A
t
AK
eKAet
tt
tt
t
t
tt
ln
1
;at hence
:0at line slop The
1)(
632.011
lim
11
//
0/
0
1/
//
plotlogarithm The:3 Fit
Slope Intial of Method:2 Fit
63.2% of Method:1 Fit

Example: Mercury Example: Mercury thermometer thermometer
A mercury thermometer is registering a temperature of 75F. Suddenly it is placed in a 400F oil bath. The following data are obtained.
Time (sec)
0 1 2.5 5 8 10 15 30
Temp. (F)
75 107 140 205 244 282 328 385
Estimate the time constant of the temperature using (1)Initial slope method(2)63% response method(3)From a plot of log(400-T) versus time

Solution Solution
0 5 10 15 20 25 3050
100
150
200
250
300
350
400
time
tem
pera
ture
((1) =9sec)

ComparisonsComparisons
0 5 10 15 20 25 3050
100
150
200
250
300
350
400
Fit 1
Fit 2
Fit 3

3-3 Transfer Functions 3-3 Transfer Functions – – Cont.Cont.
By including the effect of surrounding temperature:
( )
( ) (1)
steady state
0 (2)
(1) (2)
p i p v
p i s p v
p i s p
p i i
dT tf C T t q t f C T t V C
dtdT t
f C T t UA T t T t f C T t V Cdt
f C T UA T T f C T
f C T t T
( )
( )
( )
s s p v
p i s p v
pvi s
p p p
d T t TUA T t T T t T f C T t T V C
dtd t
f C t UA t t f C t V Cdt
fCd tV C UAt t t
f C UA dt f C UA f C UA

3-3 Transfer Functions 3-3 Transfer Functions – – Cont.Cont.
1 2
1 21 2
( )
1 1
i s
i s p i p s
d tt K t K t
dtLaplacing
K Ks s s G s s G s s
s s
Gp1(s)
Gp2(s)
+
+
i(s)
s(s) (s)Σ

Numerical DataNumerical Data
3
3
3
1
10 / min; 80 ; 60 ; 25
1 /
1000 /
1000
0
10 1000 1 80 605714 / min
60 25
1000 1000 163.6min
10 1000 1 5714
i s
p v
p i s p
p i
s
v
p
p
f m T C T C T C
C Kcal Kg C C
Kg m
V m
f C T UA T T f C T
f C T TUA Kcal C
T T
V C
f C UA
fCK
2
10 1000 10.6364
10 1000 1 5714
57140.3636
10 1000 1 5714
p
p
f C UA
UAK
f C UA

Examples (1) Thermal Process- Examples (1) Thermal Process- ContinuedContinued
Deviation Variables
1 2
i i i
s s s
i s
t T t T
t T t T
t T t T
dK K
dt

3-3 Transfer Functions-An 3-3 Transfer Functions-An ExampleExample
3
3 1/ 2
( )
( ) flow through valve, /
valve coefficient, /
pressure drop across valve
specific gravity of liquid
( ) ( ) '
f
f
f
P tf t C
G
f t m s
C m s kPa
P t
G
gh tP t gh t f t C C h t k h t
G
f0
Cross-sectional=A2
h2V2
f1
f2
h1V1
Cross-sectional=A1

3-3 Example Non-3-3 Example Non-Interactive TanksInteractive Tanks
1 1 11 1 0 1 1 0 1
2 2 22 2 1 2 2 1 2 1 2
d h h dHA A f k h F aH
dt dt
d h h dHA A f k h F bH aH bH
dt dt
01 1 11 1 1 0 1 1 1 0
2 2 21 2 2 2 1 2 2 2 1
1
1
FA dH dHH K F H s H s KF s
a dt a dtA dH dHa
H H K H H s H s KH sb dt b dt

3-3 Example Non-3-3 Example Non-Interactive Tanks Interactive Tanks – Cont.– Cont.
12
2
sK
11
1
sK
F0(s)
H1(s)
H2(s)
F0(s) H2(s) 11 21
21
ss
KK

3-4 Dead Time3-4 Dead Time

3-4 Dead Time – 3-4 Dead Time – Cont.Cont.Time delay:
0
0
0
3
2
distance
velocity /
flow rate (m /s)
cross-sectional area of pipe, m
length of pipe, m
, if 1/ 11
p
t st t
i
Lt
f A
f
Ap
L
s es s t e
s s

3-4 Dead Time – 3-4 Dead Time – Cont.Cont.

3-4 Causes of Dead 3-4 Causes of Dead Time - Time - Cont.Cont.
Transportation lag (long pipelines)Sampling downstream of the processSlow measuring device: GCLarge number of first-order time
constants in series (e.g. distillation column)
Sampling delays introduced by computer control

3-4 Effects of Dead-3-4 Effects of Dead-Time - Cont.Time - Cont.
Process with large dead time (relative to the time constant of the process) are difficult to control by pure feedback alone:
Effect of disturbances is not seen by controller for a while
Effect of control action is not seen at the output for a while. This causes controller to take additional compensation unnecessary
This results in a loop that has inherently built in limitations to control

3-5 Transfer Functions 3-5 Transfer Functions and Block Diagramsand Block Diagrams
Consider a general transfer function for an input X(s) and an output Y(s):
Note that the above case is always true , although many mathematical manipulating is needed as shown below:
011 1
11 1
1
1
t sm mm m
n nn n
K a s a s a s eY sG s n m
X s b s b s b s

3-5 Transfer Functions and 3-5 Transfer Functions and Block Diagrams Block Diagrams – Cont.– Cont.

3-5 Transfer Functions and 3-5 Transfer Functions and Block Diagrams Block Diagrams – Cont.– Cont.

3-5 Transfer Functions and 3-5 Transfer Functions and Block Diagrams Block Diagrams – Cont. – Cont. (Example 3-5.2)(Example 3-5.2)

3-5 Transfer Functions and 3-5 Transfer Functions and Block Diagrams Block Diagrams – Cont. – Cont. (Example 3-5.3)(Example 3-5.3)

3-5 Transfer Functions and 3-5 Transfer Functions and Block Diagrams Block Diagrams – Cont. – Cont. (Example 3-5.3)(Example 3-5.3)

3-6 Gas Process 3-6 Gas Process ExampleExample
1
1
( ) 0.16 ( )
( ) 0.00506 ( ) ( ) ( ) ( )
8 ; 40 ; 1 ; 50%
i i
o o
i o i o
f t m t
f t m t p t p t p t
f f scfm p psia p atm m m

3-6 Gas Process 3-6 Gas Process Example – Example – Cont.Cont.
1 11
1 2
; 0.00263 /
(1)
0 (2)
(1) (2) yields
i o
i o
i o
o o oo o ss o o ss ss
o
i o
dnf t f t lbmole scf
dtpV nRT
V dpf t f t
RT dt
f t f t
f f ff t f m t m p t p p t p
m p p
V dPaM t C M t C
RT dt
3 1
31 211 1 1i o
P t C P t
KK KP s M s M s P s
s s s

3-6 Gas Process 3-6 Gas Process Example – Example – Cont.Cont.
Σ
s+1
K1
s+1
K2
s+1
K3
+-
-
Mi(s)
Mo(s)
P1(s)
P(s)

3-6 Gas Process 3-6 Gas Process Example – Example – Cont.Cont.
1 1
1/ 2
2 1 1
1/ 2
1/ 2
3 1 11
0.00506 0.00506 40(40 14.7) 0.1610
C 0.00506 1/ 2 2
0.00506 50 1/ 2 40(40 14.7) 2 40 14.7 0.2597
0.00506
0.00506 50 1/ 2 40(40 14.7)
oss
o
oss o
oss o
fC p p p
m
fm p p p p p
p
fC m p p p p
p
1/ 2
1 2
2 1 2
3 3 2
2
40 -0.16
0.16 / 0.6162
/ 0.6199
/ -0.6126
20= 5.2481min
10.73 (60 460) 0.00263 0.2597
K C
K C C
K C C
V
RT C

3-7 Chemical Reactor3-7 Chemical Reactor
2
0
( 1) AAi A A
A A
Ad A
dcf t c t f t c t r t V V
dt
r kc
c t c t t

3-7 Chemical Reactor – 3-7 Chemical Reactor – Cont.Cont.
2 2
Ai Ai Ai Ai Ai Ai Ai Ai
A A A A A A A A
A A A A A A A
f t c t fc f c c c f t f fc fC c F t
f t c t fc f c c c f t f fc fC c F t
r t r kc c c r kC
( 1) 2 (1)
( 1) 0 (2)
(1)-(2)
2
AAi Ai Ai A A A A A
Ai A A
AAi Ai A
dcfc fC t c F t fc fC c F t r kC V V
dt
fc fc r t V
dCV fC t c c F t f
dt
2 2 2
A
Ai AAA Ai
kV C
c cdCV fC C t F t
f kV dt f kV f kV

3-7 Chemical Reactor – 3-7 Chemical Reactor – Cont.Cont.
01 2 ;1 1
stA Ai Ad A
K KC s F s C s C s e C s
s s

3-8 Effects of Process 3-8 Effects of Process NonlinearityNonlinearity
Real processes are mostly nonlinearThe approximate linear models are only
valid in local about the nearby of the operating point
In some cases, process nonliearity may be detrimental to the control quality (e.g. high purity column)
Process nonliearity plays important role to control quality in control systems

3-8 Effects of Process 3-8 Effects of Process Nonlinearity – Nonlinearity – Cont.Cont.

3-9 Additional 3-9 Additional CommentsComments
Reading assignmentP96-98

HomeworkHomework
Page 993-1, 3-2, 3-3, 3-4, 3-9, 3-10 (April
17th), 3-13, 3-14(SIMULINK) 3-20, 3-21 (April 24th)

Process-Supplemental Process-Supplemental MaterialMaterial
Inputs: f(t), Ti(t),Ts(t)Output: T(t)
Ts
vpispp
ipi
p
pi
p
v
spipiipipv
sssiii
vssppipiiipi
vspipi
CCtUACf
UAtF
UACf
TTCt
UACf
Cft
dt
td
UACf
CV
tUAtFTCTCtCftUACfdt
tdCV
TtTtftftFTtTtTtTt
dt
tdTCVTtTUATCftfTtTUACfTCftfTtTCf
dt
tdTCVtTtTUAtTCf(t)tTCf(t)
; Assume
)(
;;;
)(
onAccumulatiOutputEnergy of Rate-InputEnergy of Rate

3-3 Transfer Functions 3-3 Transfer Functions – – Cont.Cont.
Gp1(s)
Gp2(s)
+
+
i(s)
s(s) (s)Σ
sFGsGssGsFs
Ks
s
Ks
s
Ks
Laplacing
tFKtKtKtdt
td
pspipsi
si
321321
321
)(111
Gp3(s)F(s)

Thermal Process-Thermal Process-Supplemental MaterialSupplemental Material
2714.1
57141100010
608011000
3636.0;6364.0
min6.63
1000;/1000
/1
50min;/10
3
21
33
3
UACf
TTCK
UACf
UAK
UACf
CfK
UACf
CV
mVmKg
CKgKcalCC
CTTmf
p
ip
pp
p
p
v
vp
i