
Cellphone Controlled Robot
35
Submitted By: Akansha Jaiswal Avni Rajpal Harshita Jain
-
Upload
avni-rajpal -
Category
Documents
-
view
221 -
download
0
Transcript of Cellphone Controlled Robot
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 1/35
Submitted By:Akansha JaiswalAvni Rajpal
Harshita Jain
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 2/35
Autonomous mobile robotics - a fascinatingresearch topic :
Sense physical properties of the environmentthrough its sensors into an intelligent agent
Able to identify features, detect patterns andregularities,
Learn from experience
Build maps to navigate and
Find the simultaneous application of many researchdisciplines
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 3/35
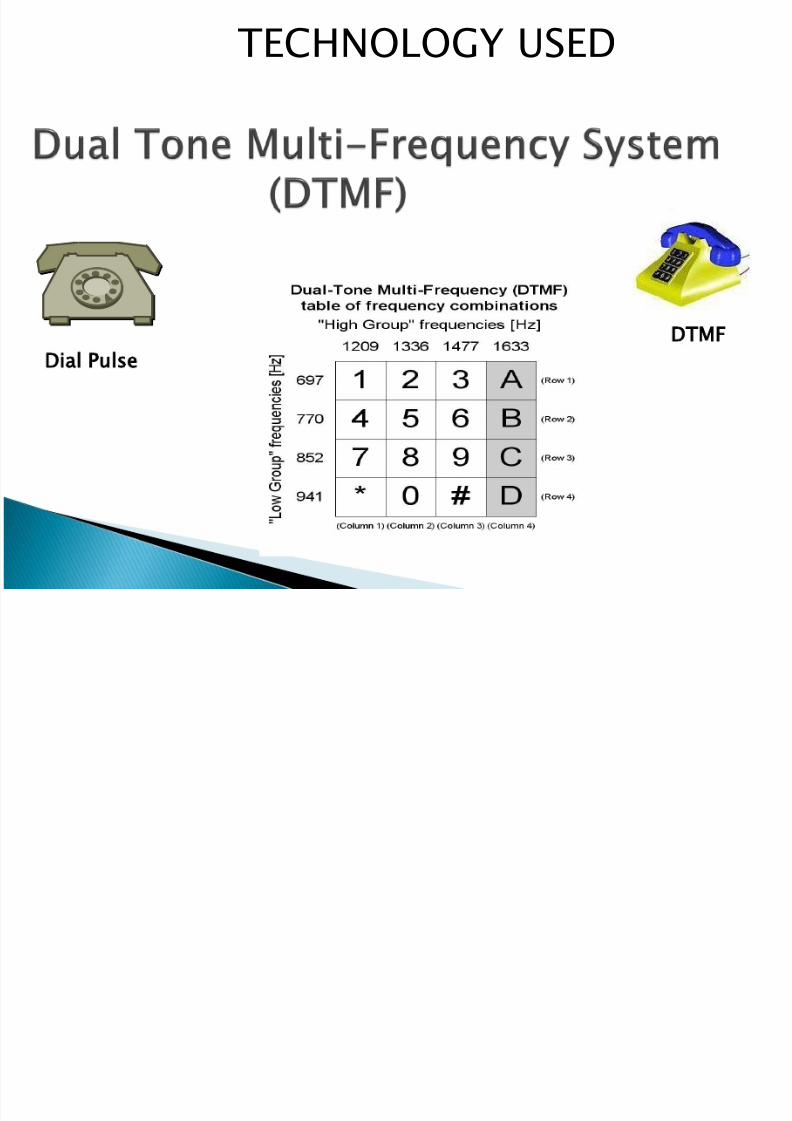
Dial Pulse
DTMF
TECHNOLOGY USED
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 4/35
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 5/35
d
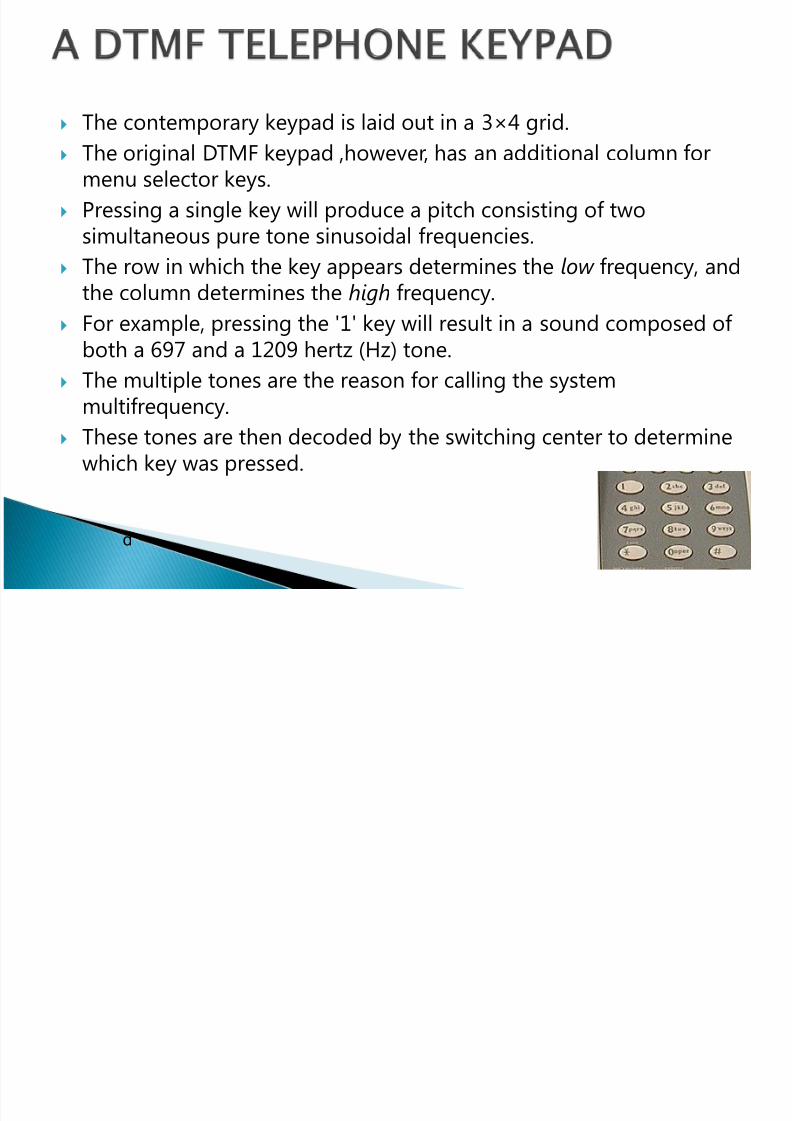
The contemporary keypad is laid out in a 3×4 grid.
The original DTMF keypad ,however, has an additional column formenu selector keys.
Pressing a single key will produce a pitch consisting of twosimultaneous pure tone sinusoidal frequencies.
The row in which the key appears determines the low frequency, andthe column determines the high frequency.
For example, pressing the '1' key will result in a sound composed of both a 697 and a 1209 hertz (Hz) tone.
The multiple tones are the reason for calling the system
multifrequency. These tones are then decoded by the switching center to determine
which key was pressed.
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 6/35
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 7/35
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 8/35
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 9/35
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 10/35
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 11/35
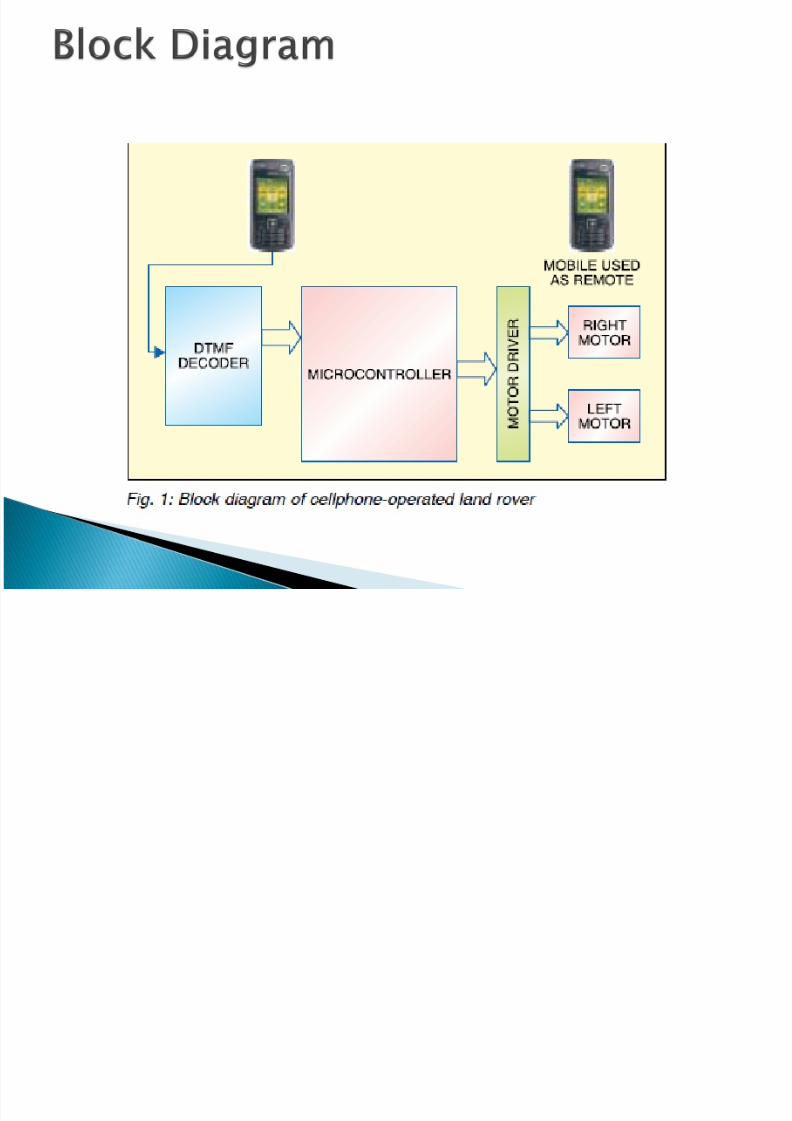
Robot, is controlled by a mobile phone that makes call to the mobile
phone attached to the robot. In the course of the call, if any button is pressed, control
corresponding to the button pressed is heard at the other end of the call.
This tone is called dual tone multi frequency (DTMF). Robot receives
this DTMF tone with the help of phone stacked in the robot,The received tone is processed by the microcontroller with the helpof DTMF decoder . The decoder decodes the DTMF tone in to itsequivalent binary digit and this binary number is sent to themicrocontroller,
The microcontroller is preprogrammed to take a decision for anygive input and outputs its decision to motor drivers in order to drivethe motors for forward or backward motion or a turn.The construction of receiver and transmitter units are not required.

7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 12/35
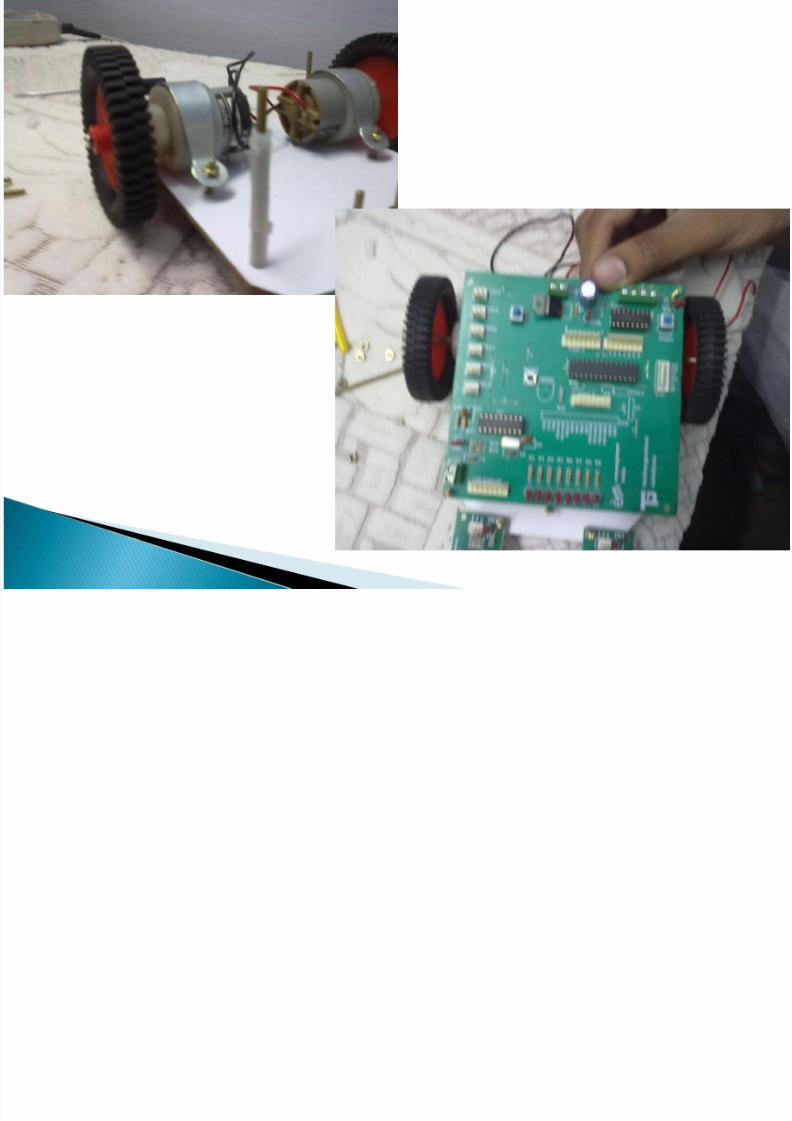
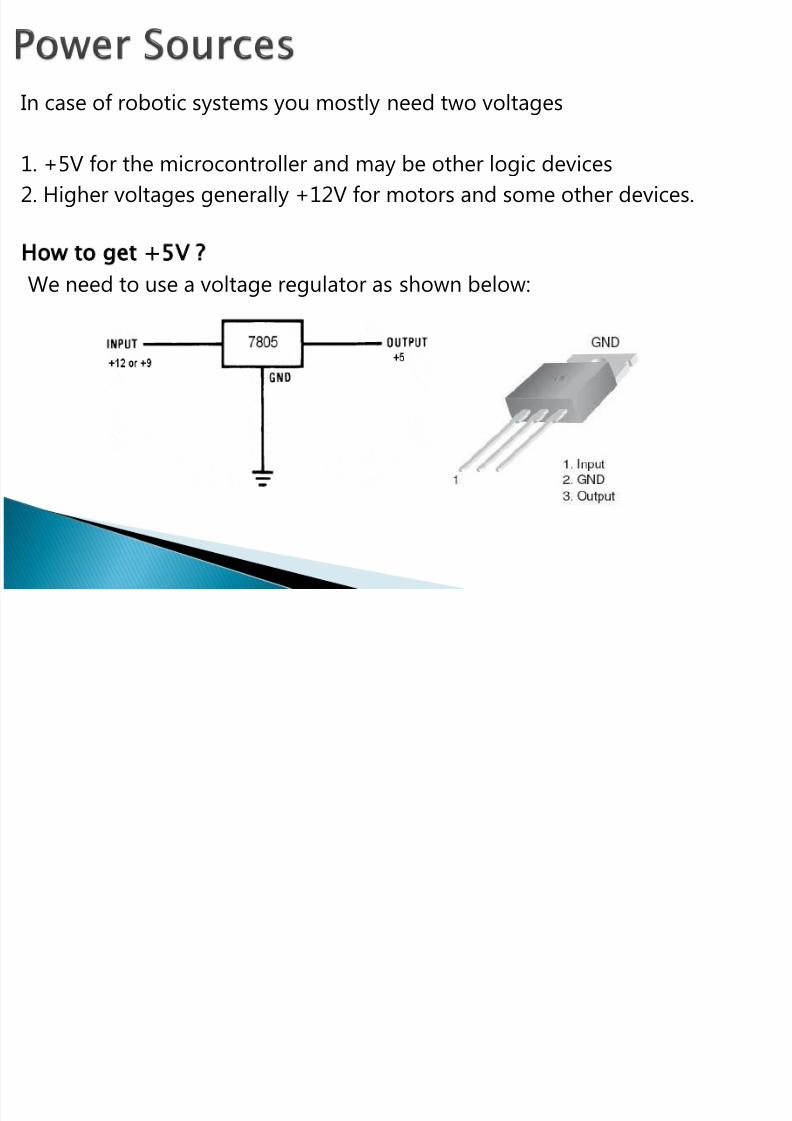
1. The controller board (Brain)
Built around the popular Atmel AVRmicrocontroller Atmega 8 4 channels of motor controller Board,capable of driving 2 dc motorOn board power regulator ICOn board power supply socket
LEDs(Light Emitting Diodes) fordisplay Atmega 8 Microcontroller
2) Programmer:
USB PoweredSupports almost all AVR seriesmicrocontrollersUSB cableISP Connector
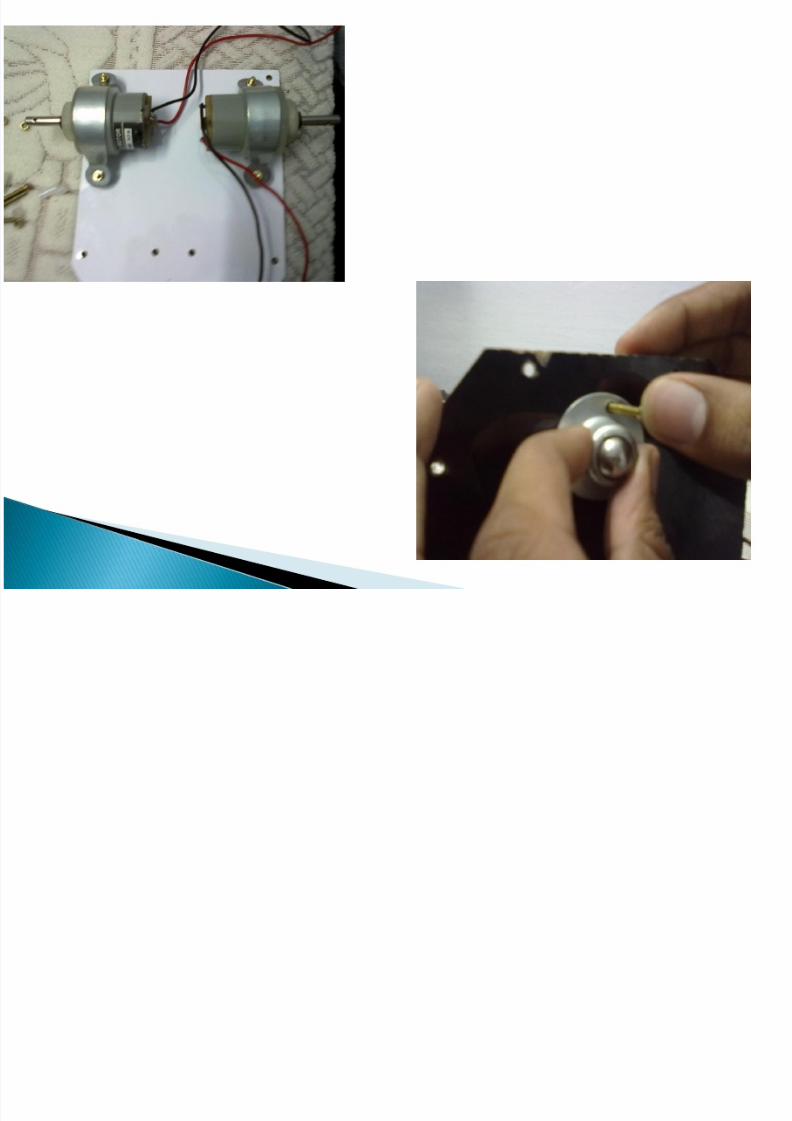
3.Motors:
2 dc geared motors with metal gears
1 castor wheel2 Wheels with rubber grip
4) Sensors:
2 IR sensors
5)Power Supply:
Two 9V Radio Battery

7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 13/35
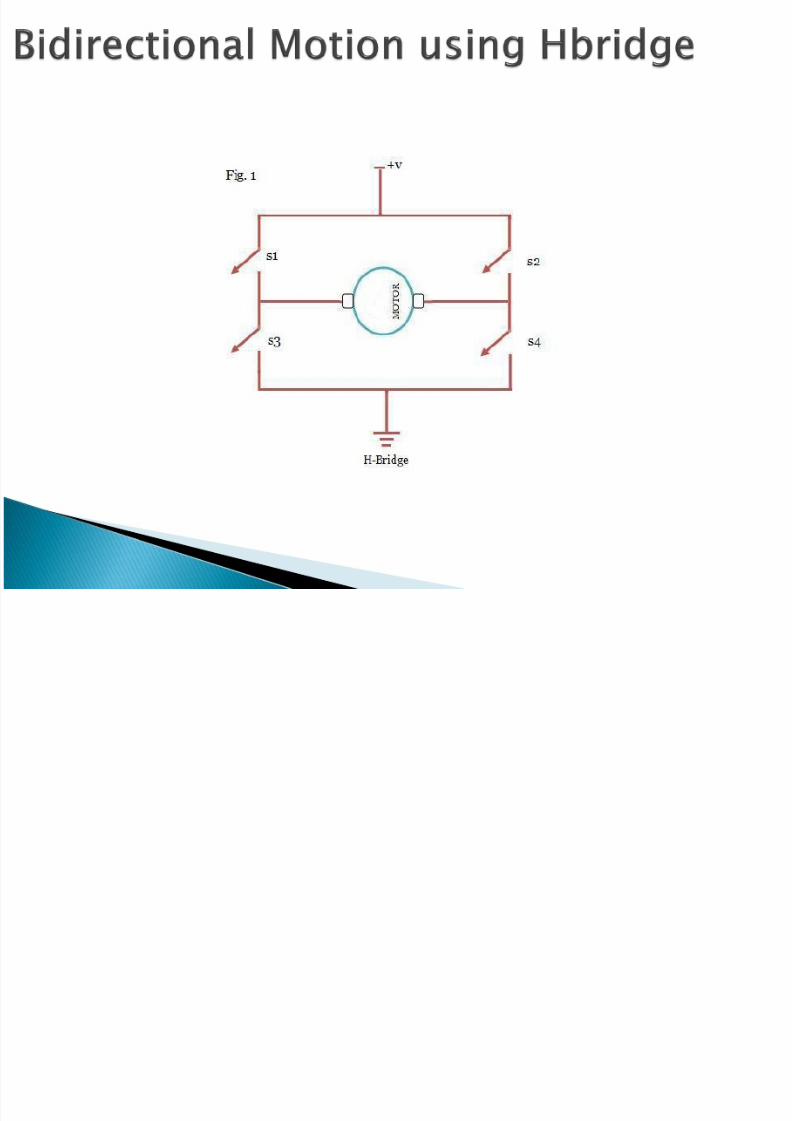
Motors are the output devices that are used to provide motion to the robot.
In our project we are using dc geared motor.
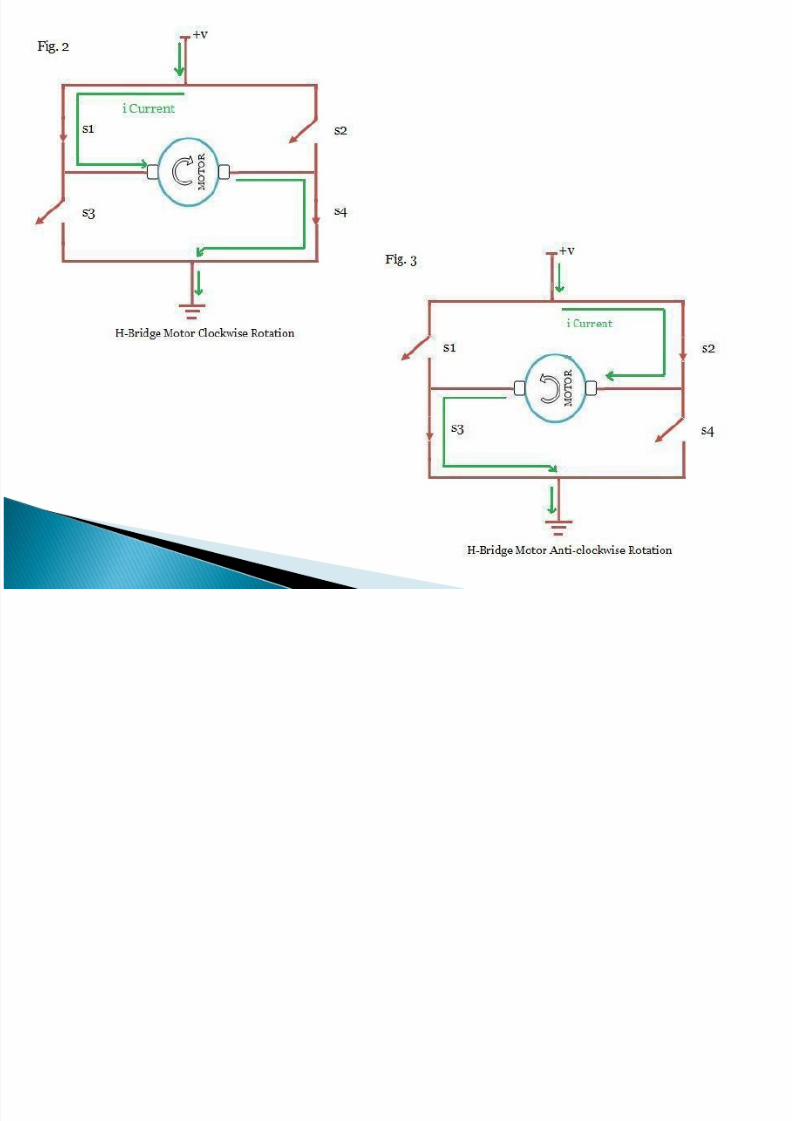
When we apply Vs(+ve voltage) to terminal1 and ground to terminal2 themotor rotates in one directions
and if we apply ground to terminal1 and Vs to terminal2 it rotates inopposite direction.
The function of gears is to increase the torque and reduce the speed.
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 14/35
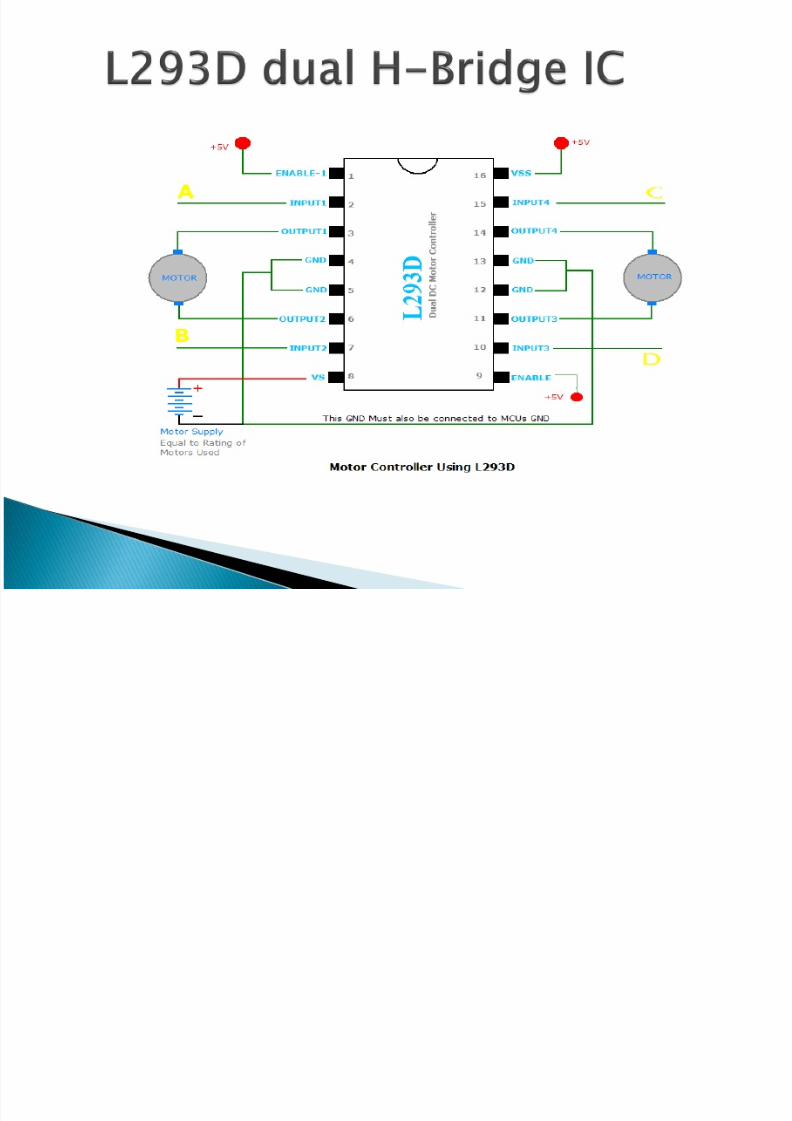
A DC geared motor usually draws current more than themaximum value per pin of the Microcontrollers.
Thus if we connect it directly to the microcontroller ,itwill be damaged.
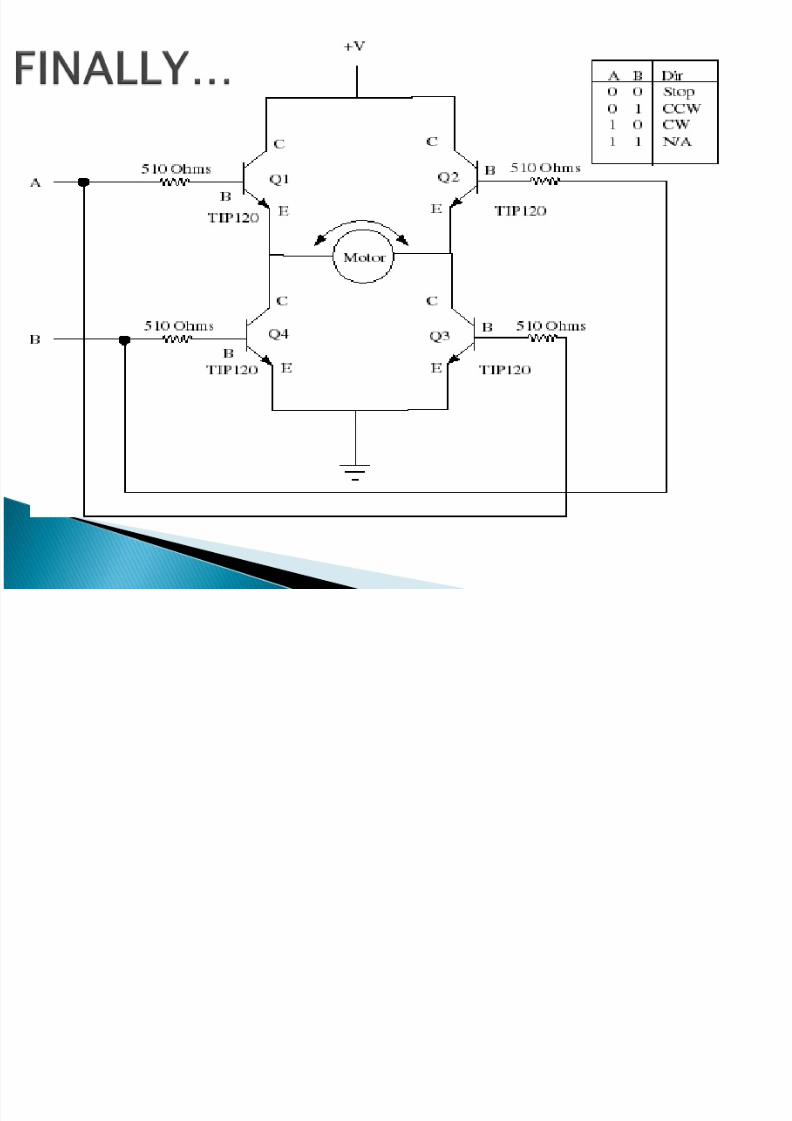
So some kind of driver is needed in between. The driver to be used depends on whether we want
unidirectional motion or bidirectional motion.
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 15/35
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 16/35
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 17/35
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 18/35
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 19/35

7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 20/35

7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 21/35
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 22/35
AVR stands for Advanced Virtual RISC. RISC meansreduced instruction set computer.
Another is a CISC architecture which stands for complex
instruction set computer. In RISC there are small number of simple instructions
only that can be executed within a single clock cyclewhereas
In CISC there are large number of complex instructionsthat generally take more than one clock cycle.
Microcontroller in this family may be 8bit or 16 bit
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 23/35
It is a microcontroller of AVR family with
• 8 KB of flash memory
The flash memory is used to store the program that provides theintelligence to the system.
• 512 bytes EEPROMEEPROM is used to store the data values that may need to be changed
by the program written by us but we want that to be storedpermanently.
• 1 KB of internal SRAMInternal SRAM is used to store the values of various variables that are
not required to be stored
permanently.
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 24/35
• Two 8 bit timer/counters • One 16 bit timer/counter
• 6 built in ADC’s
• Internal calibrated crystal oscillator(1,2,4 and 8 MHz)
• Programmable serial USART etc.
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 25/35
#define F_CPU 8000000UL
#include <avr/io.h>
int main() {
int DTMF;
DDRB=0b11111111;
DDRC=0b0000000; while(1)
{
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 26/35
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 27/35
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 28/35
1) Scientific
Remote control vehicles have various scientific uses including
hazardous environments, working in the deep ocean , and space
exploration. The majority of the probes to the other planets in
our solar system have been remote control vehicles, although
some of the more recent ones were partially autonomous. The
sophistication of these devices has fueled greater debate on the
need for manned spaceflight and exploration.
2)Military and Law Enforcement Military usage of remotely controlled military vehicles dates back
to the first half of 20th century. Soviet Red Army used remotely
controlled Teletanks during 1930s in the Winter War and early
stage of World War II.

7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 29/35
3) Search and Rescue
UAVs will likely play an increased role in search and rescue in
the United States. This was demonstrated by the successful use
of UAVs during the 2008 hurricanes that struck Louisiana andTexas.
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 30/35
4)Recreation and Hobby
Small scale remote control vehicles have long been
popular among hobbyists. These remote controlledvehicles span a wide range in terms of price andsophistication. There are many types of radiocontrolled vehicles. These include on-road cars, off-road trucks, boats, airplanes, and even helicopters.
The "robots" now popular in television shows such asRobot Wars, are a recent extension of this hobby(these vehicles do not meet the classical definition of arobot; they are remotely controlled by a human).
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 31/35
Wireless control
Surveillance System.
Vehicle Navigation with use of 3G technology.
Takes in use of the mobile technology whichis almost available everywhere.
This wireless device has no boundation of
range and can be controlled as far as networkof cell phone
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 32/35
Cost of project if Cell phone cost included.
Not flexible with all cell phones as only a
particular ,cell phone whose earpiece is attachedcan only be used.
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 33/35
1. IR Sensors:IR sensors can be used to automatically detect & avoid
obstacles if the robot goes beyond line of sight. This avoidsdamage to the vehicle if we are maneuvering it from adistant place.
2. Password Protection:Project can be modified in order to password protect the
robot so that it can be operated only if correct password is
entered. Either cell phone should be password protectedor necessary modification should be made in the assemblylanguage code. This introduces conditioned access &increases security to a great extent.
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 34/35
3. Alarm Phone Dialer:
By replacing DTMF Decoder IC CM8870 by a 'DTMF
Transceiver IC’ CM8880, DTMF tones can be generated from
the robot. So, a project called 'Alarm Phone Dialer' can be built
which will generate necessary alarms for something that is
desired to be monitored (usually by triggering a relay). For
example, a high water alarm, low temperature alarm, opening
of back window, garage door, etc.
When the system is activated it will call a number of
programmed numbers to let the user know the alarm has been
activated. This would be great to get alerts of alarm conditions
from home when user is at work.
4. Adding a Camera:
If the current project is interfaced with a camera (e.g. a
Webcam) robot can be driven beyond line-of-sight & range
becomes practically unlimited as GSM networks have a very
large range.
7/28/2019 Cellphone Controlled Robot
http://slidepdf.com/reader/full/cellphone-controlled-robot 35/35
1. Wikipedia - The free encyclopedia
2. http://www.8051projects.info/
3. http://www.instructables.com/
4. Schenker, L (1960), "Pushbutton Calling with a Two-Group Voice-Frequency
Code", The Bell system technical journal 39 (1): 235–255, ISSN 0005-8580
5. “DTMF Tester” , ‘Electronics For You’ Magazine , Edition (June 2003)
6. http://www.alldatasheet.com/
7. http://www.datasheet4u.com/35
8. http://www.datasheetcatalog.com/


















