
Cam Bien Do Dich Do Vi Tri Dich Chuyen
21
Wednesday, March 16, 202 2 1 2.4.5. Cảm biến quang điện Cấu tạo cảm biến quang đo vị trí dịch chuyển Bộ phát sáng: • Thường dùng LED: LED đỏ, LED hồng ngoại, LED lazer, … • Ánh sáng được phát ra theo xung Bộ thu sáng: • Thường dùng Phototransistor • Cảm nhận ánh ánh sáng và chuyển đổi thành tín hiệu điện tỉ lệ Mạch tín hiệu ra: • Chuyển tín hiệu tỉ lệ từ bộ thu sáng thành tín hiệu ON/OFF được khuếch đại
-
Upload
thu-nguyen -
Category
Documents
-
view
228 -
download
7
description
mo phong
Transcript of Cam Bien Do Dich Do Vi Tri Dich Chuyen

Tuesday, April 18, 2023 1
2.4.5. Cảm biến quang điện
Cấu tạo cảm biến quang đo vị trí dịch chuyểnBộ phát sáng:
• Thường dùng LED: LED đỏ, LED hồng ngoại, LED lazer, …
• Ánh sáng được phát ra theo xung
Bộ thu sáng:
• Thường dùng Phototransistor
• Cảm nhận ánh ánh sáng và chuyển đổi thành tín hiệu điện tỉ lệ
Mạch tín hiệu ra:
• Chuyển tín hiệu tỉ lệ từ bộ thu sáng thành tín hiệu ON/OFF được khuếch đại

Tuesday, April 18, 2023 2
Cảm biến quang điện
Một số hình ảnh thực tế

Tuesday, April 18, 2023 3
Cảm biến quang điện
Hoạt độngThu phát:
• Bộ thu và phát tách riêng biệt nhau• Nếu có vật chắn ngang nguồn sáng sẽ có tín hiệu ra
• Ưu điểm: khoảng cách phát hiện xa (có thể đến 30 m), độ tin cậy và độ chính xác vị trí cao, phát hiện được mọi vật thể (trừ trong suốt).
• Nhược điểm: mất nhiều thời gian cho việc lắp đặt, giá thành cao.

Tuesday, April 18, 2023 4
2.4 Cảm biến quang điện
Hoạt độngPhản xạ gương:
• Nguồn sáng phát ra tới gương và phản xạ lại bộ thu
• Nếu có vật chắn ngang nguồn sáng sẽ có tín hiệu ra
• Ưu điểm: giá thành thấp hơn loại thu phát, dễ lắp đặt và hiệu chỉnh, tin cậy.
• Nhược điểm: khoảng cách phát hiện ngắn, vẫn cần 2 điểm lắp đặt cảm biến và gương

Tuesday, April 18, 2023 5
Cảm biến quang điện
Hoạt độngPhản xạ khuếch tán:
• Bộ phát sáng phát nguồn sáng tới đối tượng• Đối tượng này sẽ phản xạ một phần ánh sáng (phản xạ
khuếch tán) ngược lại bộ thu sáng, kích hoạt tín hiệu ra
• Ưu điểm: giá thành thấp, dễ lắp đặt (chỉ cần 1 điểm lắp đặt duy nhất)
• Nhược điểm: khoảng cách phát hiện ngắn và phụ thuộc vào kích thước, bề mặt và hình dáng của đối tượng.

Tuesday, April 18, 2023 6
Cảm biến quang điện
Ưu điểmPhát hiện được mọi vật liệu
Ổn định và tốc độ cao
Độ phân giải tốt
Giá thấp
Nhược điểmẢnh hưởng bởi nhiệt độ và độ ẩm
Khó thiết kế
Độ tuyến tính không cao
Không chính xác bằng cảm biến loại cảm ứng

Tuesday, April 18, 2023 7
Cảm biến quang điện
Một số ứng dụng

Tuesday, April 18, 2023 8
Cảm biến quang điện
Một số ứng dụng

Tuesday, April 18, 2023 9
2.4.5 Cảm biến siêu âm
Nguyên lý và cấu tạo cảm biến siêu âmSiêu âm là sóng cơ học có tần số lớn hơn tần số âm Siêu âm là sóng cơ học có tần số lớn hơn tần số âm thanh thanh nghe thấy (trên 20kHz). Thính giác của con nghe thấy (trên 20kHz). Thính giác của con người rất nhạy cảm với dải tần số từ âm trầm (vài người rất nhạy cảm với dải tần số từ âm trầm (vài chục Hz) đến các âm thanh rất cao (gần 20kHz). chục Hz) đến các âm thanh rất cao (gần 20kHz).
Cảm biến siêu âm sử dụng nguyên lý phản xạ sóng Cảm biến siêu âm sử dụng nguyên lý phản xạ sóng siêu âm.siêu âm.
Cảm biến gồm 2 phần:Cảm biến gồm 2 phần: phần phát ra sóng siêu âm và phần phát ra sóng siêu âm và phần thu sóng siêu âm phản xạ vềphần thu sóng siêu âm phản xạ về

Tuesday, April 18, 2023 10
2.2 Cảm biến siêu âm
Nguyên lý và cấu tạoCảm biến sẽ phát ra 1 sóng siêu âm. Nếu có chướng Cảm biến sẽ phát ra 1 sóng siêu âm. Nếu có chướng ngại vật trên đường đi, sóng siêu âm sẽ phản xạ lại và ngại vật trên đường đi, sóng siêu âm sẽ phản xạ lại và tác động lên module nhận sóng. tác động lên module nhận sóng.
Đo thời gian từ lúc phát và nhận sóng ta sẽ tính được Đo thời gian từ lúc phát và nhận sóng ta sẽ tính được khoảng cách từ cảm biến đến chướng ngại vật khoảng cách từ cảm biến đến chướng ngại vật
V: vận tóc sóng siêu âm (343 m/s trong không khí)
t: thời gian từ lúc phát đến lúc thu

Tuesday, April 18, 2023 11
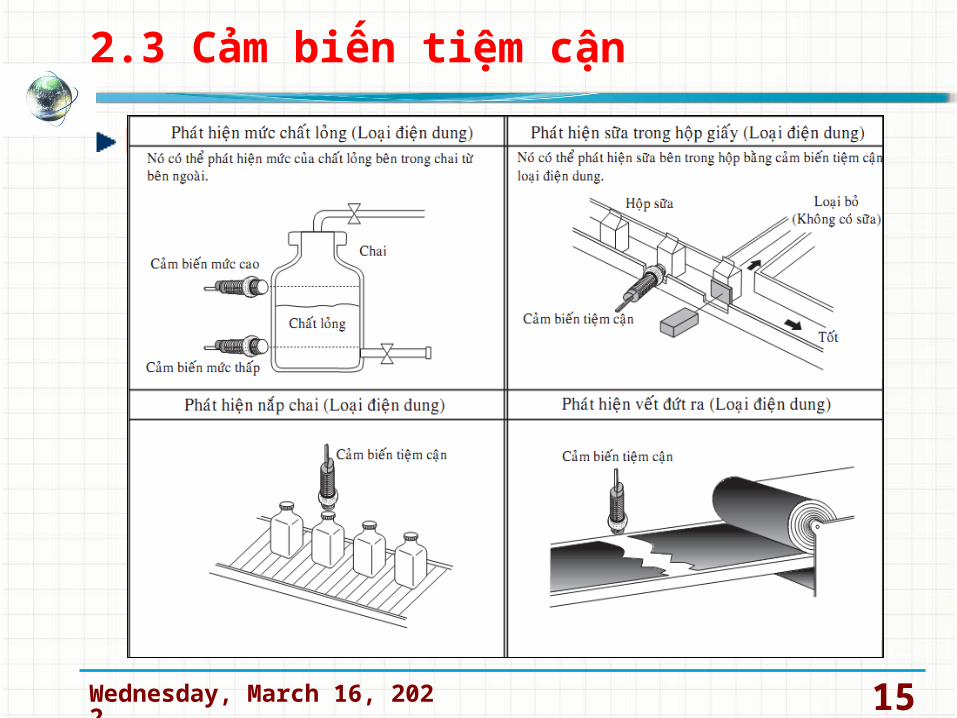
2.4.6 Cảm biến tiệm cận
Cấu tạo và nguyên lý cảm biến tiệm cậnCảm biến tiệm cận sử dụng dao động tần số cao để phát hiện vật khi gần cảm biến
Có 2 loại cảm biến tiệm cận:
• Loại cảm ứng: phát hiện kim loại từ tính và không từ tính bằng cách tạo ra trường điện từ.
• Loại điện dung: phát hiện vật kim loại và không kim loại bằng tạo ra điện trường tĩnh.

Tuesday, April 18, 2023 12
Cảm biến tiệm cận
Một số hình ảnh thực tế

Tuesday, April 18, 2023 13
2.3.1 Cảm biến tiệm cận loại cảm ứng
Cấu tạo: Gồm có 4 thành phần:
• Cuộn dây: tạo ra từ trường
• Bộ dao động: tạo dao động tần số cao
• Mạch kích: Giám sát biên độ của bộ dao động
• Ngõ ra: Mở / tắt

Tuesday, April 18, 2023 14
2.3.1 Cảm biến tiệm cận loại cảm ứng
Hoạt động: Khi đối tượng vi chuyển đến gần cảm biến - đi vào vùng từ trường, xuất hiện dòng điện xoáy trên bề mặt đối tượng, làm giảm biên độ của bộ dao động.
Mạch kích giám sát biên độ của bộ giao động và kích thích cho ngõ ra của cảm biến mở (tắt)
Tuesday, April 18, 2023 15
2.3 Cảm biến tiệm cận
Một số ứng dụng

Tuesday, April 18, 2023 16
2.3 Cảm biến tiệm cận
Một số ứng dụng

2. Cảm biến điện trở kim loại2. Cảm biến điện trở kim loại
2.1. Cấu tạo cảm biến đo biến dạng
Dây điện trở tiết diện tròn d20m hoặc chữ nhật.
Số nhánh n = 10 20 nhánh.
Đế cách điện: giấy (~ 0,1 mm), chất dẻo (~ 0,03 mm).
a) Dạng lưới dây b) Dạng lưới màng
Đế cách điện
Dây điện trở
Đế cách điện
Màng điện trở

2. Cảm biến điện trở kim loại2. Cảm biến điện trở kim loại
Điện trở của cảm biến:
S
lR
.
S
S
l
l
R
R
l
l
S
S
2 ;Với
l
lC
V
VC
)21( (C: hằng số Bridman)
l
lK
l
lC
R
R
.2121
Với 22121 CK Hệ số đầu đo

2. Cảm biến điện trở kim loại2. Cảm biến điện trở kim loại
2.2. Đặc điểm: Vật liệu chế tạo điện trở cần có đủ lớn. Hệ số đầu đo nhỏ: thông thường K = 2 3. Trong giới
hạn đàn hồi K=const, Ngoài giới hạn đàn hồi (khi l/l > 0,5% - 20% tùy vật liệu) K 2.
Ảnh hưởng của T: trong khoảng - 100oC 300oC:
(K0 ứng với T = 25oC, constantan K = +0,01%/oC, isoelastic khá lớn).
Ảnh hưởng của biến dạng ngang sai số (không đáng kể có thể bỏ qua).
00 1 TTKTK K

2. Cảm biến điện trở kim loại2. Cảm biến điện trở kim loại

1. Cảm biến đo vận tốc1. Cảm biến đo vận tốc
c) Đo vận tốc gốc
Tốc độ kế xungQuang
1) Nguồn sáng 2) Thấu kính hội tụ 3) Đĩa quay 4) Đầu thu quang
- Nguồn sáng là một diot phát quang
- Đĩa quay: đặt giữa nguồn sáng và đầu thu, có các lỗ bố trí cách đều trên một vòng tròn.
- Đầu thu là một photodiode hoặc phototranzitor.
Hoạt động
- Khi đĩa quay, đầu thu chỉ chuyển mạch khi nguồn sáng, lỗ, nguồn phát sáng thẳng hàng.
- Đầu thu quang nhận được một thông lượng ánh sáng thay đổi và phát tín hiệu có tần số tỉ lệ với tốc độ quay nhưng biên độ không phụ thuộc tốc độ quay.









![Do an Chuyen Nganh Hoa Phan Tich (COD)[1]](https://static.fdocuments.net/doc/165x107/557201eb4979599169a29f57/do-an-chuyen-nganh-hoa-phan-tich-cod1.jpg)







