BMI 1 sazetak

of 15
-
Upload
dimitrije-gladovic -
Category
Documents
-
view
226 -
download
0
Transcript of BMI 1 sazetak
-
8/17/2019 BMI 1 sazetak
1/15
MAŠINSKO INŽENJERSTVO U PRAKSI - MODUL ZA BIOMEDICINSKO INŽENJERSTVO
Handout, 2014-15
1
BIOMEDICINSKO INŽENJERSTVO
1. Uvod
Biomedicinsko inţenjerstvo je jedna od najmlaĎih grana mašinskog inţenjerstva i često se pogrešno smatrada je nastala tek u 21-om veku, ali mnogi medicinski aparati i ureĎaji (npr. rendgen) koje su napravili
inţenjeri nalaze se u upotrebi još od početka 20.og veka.
Biomedicinsko inţenjerstvo se moţe definisati kao primena inţenjerskih principa, metoda i tehnika za
rešavanje problema u biološkim i medicinskim naukama. To je vrlo sofisticirana grana inţenjerstva koja predstavl ja integraciju inţenjerstva i medicine u cilju poboljšanja kvaliteta ljudskog ţivota.
Osnovni problemi kojima se bave biomedicinski inţenjeri se mogu podeliti u dve grupe. Prva grupa
problema se svodi na proučavanje kompleksnih ţivih sistema eksperimentalnim i analitičkim tehnikama saciljem boljeg razumevanja kako ţivi organizam funkcioniše u stanjima zdravlja i bolesti, a druga grupa problema se svodi na razvoj ureĎaja, metoda i algoritama koji vode napretku i efikasnijoj medicini, kao inapretku drugih grana inţenjerstva jer se ţivi organizam moţe shvatiti kao jedan visoko sofisticirani,kompleksni sistem i principi njegovog funkcionisanja mogu posluţiti kao inspiracija za razvoj i rešavanje problema u drugim granama inţenjerstva (primeri: veštačka inteligencija, računarska vizija, fazi sistemiisl.).
2. Potraţnja za biomedicinskim inţenjerima
Biomedicinsko inţenjerstvo je jedna od disciplina sa najbrţim razvojem u poslednjih 10 godina. Za područje Sjedinjenih Američkih Drţava na primer, prema podacima n jihovog Biroa za statistiku rada, brojotvorenih radnih mesta za biomedicinske inţenjere je porastao za 72% u prošloj deceniji, dok su poreĎenjaradi avio industrija, naftna industrija ili nuklearna energetika imale porast potraţnje tek 18%. Ovakav trend porasta diktiran je prvenstveno potrebom za jeftinijim zdravstvenim uslugama, pri čemu se očekuje da
biomedicinsko inţenjerstvo ispuni tri osnovna zahteva: brţe, bolje i jeftinije. Razlog povećanoj potraţnji biomedicinskih inţenjera je takoĎe i trend povećanja starosti svetske populacije, povećanje broja obolelih
Slika 1. Razvoj ureĎaja, metoda i algoritama koji vode napretku i efikasnijoj medicini jedan je od ključnih zadataka biomedicinkihinţenjera
-
8/17/2019 BMI 1 sazetak
2/15
MAŠINSKO INŽENJERSTVO U PRAKSI - MODUL ZA BIOMEDICINSKO INŽENJERSTVO
Handout, 2014-15
2
od gojaznosti i dijabetesa, kancera itd, kao i povećani zahtevi za ubrzanim razvojem ekonomski zaostalihzemalja sveta. Za narednu deceniju, odnosno do 2018 očekuje se još brţi razvoj.
Prema podacima istog izvora raspon mogućih primanja na godišnjem nivou za biomedicinske inţenjere uSAD je od 77.4-122 hiljade dolara, dok je iynos prosečna plate generalno na godišnjem nivou oko 50hiljada dolara.
3. Profesionalna specijalizacija na polju Biomedicinskog inţenjerstva
Biomedicinsko inţenjerstvo je izrazito multidisciplinarna oblast i usled toga nudi različite vrste
profesionalne specijalizacije.
1. Bioinstrumentacija - uključuje primenu inţenjerskih principa i metoda, uključujući i kompjutere u
razvoju ureĎaja za dijagnozu i terapiju bolesti
2. Biomehanika - primenjuje principe mehanike za proučavanje, razumevanje i simulaciju
medicinskih problema i sistema koji uključuju kretanje ili transport telesnih fluida. Prostetičkior gani kao što su veštačko srce, bubrezi ili zglobovi su primeri ureĎaja koje su konstruisali biomedicinski inţenjeri specijalizovani za biomehaniku. Biomaterijali - ova oblast podrazumeva razvoj veštačkih materijala, ali i razvoj i stimulacijurazvoja prirodnih tkiva. Izbor materijala koji poseduje odreĎene karakteristike je od ključnogznačaja za razvoj bilo kakvih implantata ili veštačkih organa, i uključuje različite vrste legura,keramike, polimera i kompozita.
3. Imidţing metode u medicini - kombinuju obradu podataka (slike ili signala), analizu i prikazivanje
medicinskih podataka koji mogu pomoći u identifikaciji i karakterizaciji medicinskih problema kaošto su tumori, prelomi kostiju, moţdani talasi i tome slično. Magnetna rezonanca, ultrazvuk,kompjuter ska tomografija i slične tehnike su neke od onih koje se najčešće koriste.
4. Rehabilitaciono inţenjerstvo - fokusira se na ostvarivanje nezavisnosti, povećanje sposobnosti igeneralno poboljšanje kvaliteta individua sa telesnim oštećenjima. Ova specijalizacija moţe,izmeĎu ostalog uključivati i razvoj kohlearnih implantata, bioničkog oka, egzoskeleta kojiomogućuje kretanje osobama koje imaju paralizu donjih ekstremiteta i tome slično.
5. Sistemska fiziologija - fokus ove specijalizacije je obezbeĎivanje metoda i analiza koje mogu da
pomognu razumevanju kako ţivi sistemi funkcionišu i to na mikroskopskom, pa
submikroskopskim nivoima. Proučavanje dejstva leka na organizam ili razvoj nekih bolesti koje za
sada nisu objašnjene, zatim regeneracija koţe ili auditorna fiziologija samo su neke od oblasti proučavanja sistemske fiziologije.
Slika 2.Uredjaj za merenje glukoze u krvi-neinvazivni (levo); Hirurški robotski sistem Da Vinči (sredina); Neinvazivnisenzor za merenje koncentracije glukoze u krvi (desno)
-
8/17/2019 BMI 1 sazetak
3/15
MAŠINSKO INŽENJERSTVO U PRAKSI - MODUL ZA BIOMEDICINSKO INŽENJERSTVO
Handout, 2014-15
3
6. Mikro/Nanotehnologije - su oblast koja je od naročitog interesa za biomedicinske inţenjere i kakose smatra jedna su od glavnih pravaca razvoja u budućnosti. Fokus ove specijalizacije je primena
inţenjerskih metoda i tehnika za dizajn, projektovanje i razvoj sićušnih medicinskih ureĎaja kojimogu da sluţe kao minijaturni nosači lekova, dijagnostički ureĎaji, biorazgradive mreţice koje potpomaţu regeneraciju tkiva, ili pak da omogućuju odvijanje operacija na
ćelijskom/molekularnom nivou sa minimumom oštećenja zdravog okolnog tkiva.
4. Modul za Biomedicinsko inţenjerstvo
Medicinsko mašinstvo na Mašinskom fakultetu je započeto još 80-ih godina prošlog veka, a do prekidaškolovanja studenata iz ove oblasti došlo je devedesetih godina. Ponovna reafirmacija je usledila 2006.
godine, kada je započeo i proces Bolonjske reforme i ustanovljen je Modul za Biomedicinsko inţenjerstvo(BMI) u okviru Katedre za Automatsko upravljanje, a pod vodstvom prof. dr Đura Koruge.
Program obrazovanja na Modulu BMI obuhvata osnovne akademske i master studije, a predmeti su
organizovani u nekoliko grupa k oje pripadaju različitim oblastima biomedicinskog inţenjerstva. Nastava seizvodi u vidu predavanja, auditornih i laboratorijskih veţbi, kao i u vidu samostalnih seminarskih i projektnih zadataka. Metode učenja i primene najviših standarda u obrazovanju mladih su slične onimakoje se primenjuju u vodećim obrazovnim institucijama u svetu. Jedna od aktivnosti unapreĎenja nastave je
organizacija zajedničkih progama sa evropskim školama kroz Tempus projekat.
Modul za Biomedicinsko inţenjerstvo raspolaţe jednom savremeno opremljenom učionicom za odrţavanje
nastave, kao i dvema laboratorijama- Nanolab i Laboratorija za Biomedicinsko inţenjerstvo koje suopremljene sledećom opremom: FTIR imidţing sistem (mikroskop i spektrometar), UV/VIS/NIRspektrofotometar, VIS-NIR portabilni mini-spektrometri, Nanoprobe JSPM-5200, Keyence optičkimikroskop, Vak umski naparivač, Opto-magnetna imidţing spektroskopija, JR-6 dual speed magnetometer i
mnogi drugi.
Modul za BMI saraĎuje sa brojnim inostranim obrazovnim institucijama: Kobe Univerzitetom i Tokijskim
Institutom za Tehnologiju u Japanu, Masačusetskim Institutom za Tehnologiju (MIT) i Univerzitetom
Vašington u Sijetlu iz SAD-a. Od 2014 godine uspostavljena je saradnja sa Northeastern Univerzitetom u
Bostonu iz USA i Notingem Trent Univeryitetom iz Notingema iz Velike Britanije. Saradnja sa
Northeastern Univerziteta u Bostona iz USA donela je zajedničku organizaciju treće internacionalne
konferencije ITNANO2015 u Miločeru, u polju nanomedicine. Sa druge strane, saradnja započeta sa
Notingem Trent Univerztetom iz Velike Britanije u polju rane dijagnostike karcinoma obećava dalji razvoj
> jgl
‘ : ' ^ j.
A
HKHi B
Slika 3. Biomedicinsko inţenjerstvo u budućnosti: A) Nanoroboti kao veštačke ćelije
mogu cirkulisati ljudskim telom i vršiti identifikaciju i odstranjivanje potencijalnih
patogena, B) Zlatne nanočestice - sredstvo za operacije na molekularnom nivou moţe
omogućiti uklanjanje ćelija tumora bez ikakvih posledica na okolne zdrave ćelije
-
8/17/2019 BMI 1 sazetak
4/15
MAŠINSKO INŽENJERSTVO U PRAKSI - MODUL ZA BIOMEDICINSKO INŽENJERSTVO
Handout, 2014-15
4
i usavršavanje metode Opto-magnetne imidţing spektroskopije u cilju njenog uvodjenja u medicinsku
praksu.
Pomenuti Tempus projekat pod pokroviteljstvom Evropske Unije doneo je sarsadnju sa Univerzitetom Pjeri Marija Kiri, Sorbona u Francuskoj, Tampere Univerzitetom iz Finske, Univerzitetom Maribor iz
Slovenije, Univerzitetom Birmingem iz Velike Britanije, kao i mnogim drugima. A od domaćih obrazovnih
institucija, modul BMI saraĎuje sa Vojnomedicinskom akademijom, Stomatološkim fakultetom i
Medicinskim fakultetom.
5. Biomehanika
Sa stanovišta mehanike svaki ţivi organizam (njegovo telo) se posmatra kao i bilo koje drugomaterijalno telo koje podleţe zakonima mehanike. Potreba da se ispita kretanje ţivih organizama poduticajem drugih tela dovela je do nastanka biomehanike. Biomehanika nauka koja se bavi pručavanjem
kretanja zivih bića pri čemu se analiza kretanja vrši pomoću zakona i principa koji su definisani u klasičnojmehanici. Pošto se klasična mehanika deli na: statiku, kinematiku i dinamiku, na iste ove celine moguće je podeliti biomehaniku. Statika u okviru biomehanike bavise se opterećenjima (silama i momentima) koja
deluju na čovekovo telo u stanju mirovanja (npr. koje je opterećenje u zglobu kuka kada je čovekuspravljen a koje je opterećenje kada čovek sedi). U oblasti kinematike proučavaju se pokreti ekstremitetačoveka (poliţaji, brzine i ubrzanja). Na osnovu analize formiraju se odgovarajući kinematski modeli. Udinamici čovekovog tela dodatno se uključuju teţine svih delova tela i momenti sile u zglobovima koji se javljaju usled dejstva sile u mišićima.
Čovek odnosno njegovo telo sa mehaničke tačke gledišta poseduje aktivni i pasivni deo. Pod pasivnim delom podrazumevaju se kosti i zglobovi do u aktivni deo spadaju, mišići koji omogućavaju kretanje.
Da bi se mogle uspostaviti biomehaničke zakonitosti potrebno je čoveka posmatrati u odnosnu naodgovarajući koordinatni sistem. U odnosu na taj koordinatni sistem definišu se vektori poloţaja, brzina iubrzanja ljudskih ekstremiteta. Najčešće se koristi prirodni koordinatni sistem (dekartov koordinatni sistemkoji je smešten u teţište čovekovog tela (slika 4.). U zavisnosni na koji način ravni dekartovogkoordinatnig sistema seku čovekovo telo, nose odreĎena imena. Ravan koja je prikazana pod A (slika ispodlevo) naziva se sagitalna ravan (S), pod B je frontalna ravan (F) i C je horizontalna ravan (H) (dodatno se
ova ravan naziva i transferzalna). Za mehaničku analizu veoma je značajan raspored masa. najveći deo
Slika 4. Levo - ravni koordinatnog sistema u odnosu na koji se posmatra čovekov ogranizam. Desno - princip poluga kodekstremiteta čovekovog tela.
-
8/17/2019 BMI 1 sazetak
5/15
MAŠINSKO INŽENJERSTVO U PRAKSI - MODUL ZA BIOMEDICINSKO INŽENJERSTVO
Handout, 2014-15
5
mase čovekovog tela (oko 43%) otpada na trup, glava učestvuje sa 7%, donji ekstremiteti oko 13% i donjiekstremiteti 37%. U ljudskom telu postoje 206 različitih kostiju čija je glavna uloga da daje potporu celom
telu i da omogućavaju pokrete ekstremiteta. Oko 700 mišića vezano je za skelet, na njih otpada 40% teţinetela. Mišići preko tetiva deluju na kosti, i zajednički formiraju sisteme poluga (slika ispod desno), kojeomogućavaju da se izvrše zadata kretanja ekstremiteta (ruku ili nogu) ili/i da se podigne teret.
Biomehanički model ljudske ruke
Biomehanički model ljudske ruke uključuje nadlakticu, podlakticu i šaku koji su spojeni sa mišića. Celaruka (rame, lakat, ručni zglob i zglobovi prstiju) poseduje preko 27 stepeni slobode. Za uprosteni
biomehanički model ruke ne uključujući šaku moţe se aproksimirati sa tri 7 stepeni slobode, rame 3stepena slobode, lakat - 2 stepena slobode, ručni 2 stepena slobode.
Biomehanički model ljudske noge
Nogu je moguće prestaviti uproštenim mehaničkim modelom od 5 stepeni slobode. Pri čemu se kuk prestavlja sa dva, koleno sa jednim i na kraju članak sa dva stepena slobode. MeĎutim ovaj model sedodatno uprošćuje jer za opštu analizu kretanja tela dovoljno je posmatrati ravanski model sa 3 stepenaslobode.
6. Biomehatronika
Potreba za biomehatronskim ureĎajima
Pri razvoju svakog ureĎaja postavlja se ceo niz pitanja. Neka od tih pitanja su: Da li postoji potrebaza takvim ureĎajem? Da li takav ureĎaj moţe doneti poboljšanja u oblasti u kojoj se primenjuje i koja su to poboljšanja? Kakva je ekonomska opravdanost takvog ureĎaja odnosno da li je ekonomski isplativ?Dodatna pitanja se nameću u oblasti biomedicinskog inţenjerstva: Da li ureĎaj doprinosi kvalitetumeicinske nege? Da li je takvo lečenje bolje od procesa lečenja koje izvode lekari i terapeuti? I mnogadruga pitanja...
PoĎimo od toga da je svakog lekara/terapeuta koji leči pacijenata potrebno obučiti. Ta obuka trajeviše godina. Cena takve obuke je velika! Lekar ne moţe da obezbedi terapiju jednakog kvaliteta za svakog pacijenta (psihofizičko stanje lekara utiče na kvalitet terapije). Dodatno različiti terapeuti poseduju različitoznanje (neki manje neki veće) tako da kvalitet zdravstvene nege zavisi i od obučenosti i znanja lekara.Znanje kvalitetnog terepeuta se teško prenosi izvan ustanove odnosno vezano je za ustanovu u kojoj radi,
pa su neki pacijenti primorani da prelaze velike distance u potrazi za kvalitetnijom zdravstvenom negom.
Sa druge strane primenom biomehatronskog uredjaja, smanjuju se troškovi obučavanja terapeuta(jednom projektovano mehatr oničko rešenje omogućuje jednostavno kopiranje ureĎaj sa istim nivoomkvaliteta). Cena terapije se moţe drastično smanjiti ako se ureĎaj masovno koristi, sa druge strane resursikoje ureĎaj koristi značajno su manji nego resursi koji su potrebni lekaru. Primenom ureĎaja omogućava seuniformna (jednolična) terapija svakom pacijentu i na kvalitet terapije neće uticati psihofizičko stanjelekara (isključuje se ljudski faktor). Svaka ustanova koja poseduje takav ureĎaj ima jednak kvalitet terapijei nepotrebno je ići u druge ustanove. Zahvaljujući internet tehnologijama lako je unapreĎivati postojećeureĎaje (promenom programa moguće je poboljšati kvalitet terapije), sa druge strane moguća je razmena podataka o terapijama izmeĎu ustanova kako bi se lakše i brţe analizirali prikupljeni podaci, koji bi doveli
do poboljšanja terapija.
-
8/17/2019 BMI 1 sazetak
6/15
MAŠINSKO INŽENJERSTVO U PRAKSI - MODUL ZA BIOMEDICINSKO INŽENJERSTVO
Handout, 2014-15
6
Mehatronika
Termin mehatronika 1969. godine izmislio je japanski inţenjer Tetsuro Mori iz elektronske
kompanije Yasakawa, kao kombinaciju reči „mehanika“ i „elektronika“. MeĎutim danas reč „mehatronika“ima zančajno šire značenje, koje pored mehanike i elektronike obuhvata i upotrebu računara i modernih
sistema automatskog upravljanja (slika ispod). Mehatroniku ne treba shvatiti kao jednostavno udruţivanje
navedenih podoblasti već kao njihovu kompletnu integraciju i kombinaciju. Za takvo razmišljanje, kao
primer se mogu uzeti moderni sistemi upravljanja koji su ne mogu zamisliti bez upotrebe računara, sa
druge strane ne postoji ni jedan moderan mehanički sistem koji za svoje funkcionisanje koristi čistu
mehaniku, već je uvek mehaničko kretanje takvog sistema podrţano od strane elektronike i računara (npr.
automobil).
Elementi mehatronskih sistema
1. Modeli mehaničkih (fizičkih) sistema 2. Senzori (enkoderi, akcelerometri, davači sile, protoka, osvetljenosti ...)
3. Aktuatori (DC i step motori, servo motori, hidraulika i pneumatika)
4. Elementi za akviziciju i obradu signala (A/D - D/A konvertori, pojačavači, filtri...) 5. Digitalni upravljački elementi (procesori, mikrokontroleri, PLC) 6. Monitori (LEDs, LCD, digitalni displeji...)
7. Upravljački sistemi.
Biomehatronika
Biomehatronski sistemi (Slika ispod) se mogu posmatrati kao i bilo koji drugi mehatronski sistemi
čiji je jedan od elemenata ljudsko biće. Čovek nije samo najkompleskiniji i najmanje shvaćen sistem u
inţenjerskom pogledu već je sistem sa kojim je najteţe uspostaviti interfejs (veza izmeĎu čoveka i mašine).Reakcije ljudskog organizma nisu determinističke, već su stohastičke, jer postoji mogućnost da doĎerazličitih odgovora na isti nadraţaj (npr. dejstvo sile ili električne struje) ako se stimulacija ponavalja više puta (npr. profesionalni sportista moţe da ostavari relativno ponovljive rezultate, ali fine promene početnihuslova izvan (temperatura i vlaţnost vazduha) ili unutar (da li je upravo jeo ili da li je dobro naspavan )njegovog tela mogu da dovedu do varijacije u rezultatima). Napomenimo da se ovakve promene u
odgovorima čoveka (čovekovog organizma) na spoljašnje ili unutrašnje uticaje postoje kod svi ţivih bića(npr. promene broja otkucaja srca dok se čovek odmara).
Slika 5. Šema mehatromke
-
8/17/2019 BMI 1 sazetak
7/15
MAŠINSKO INŽENJERSTVO U PRAKSI - MODUL ZA BIOMEDICINSKO INŽENJERSTVO
Handout, 2014-15
7
Matematički model čoveka ne postoji pa je proučavanje organizma uglavnom empirijsko i većinainformacija koje posedujemo o procesima unutar organizma su empirijske (iskustva lekara u radu sa
pacijentima). MeĎutim postoje parcijalni modeli odreĎenih delova ljudkog organizma koji su i pored toga
veoma sloţeni koji dodatno oteţavaju njihovu analizu (modeli ruke, noge, kičme ...). Nepostojanje modela
ili njihova kompleksnost dodatno oteţava projektovanje biomehatronskih sistema, jer ne postoje u napred
definisani parametri koje je potrebno uzeti u obzir, dodatne probleme pravi i činjenica da čovek nijelinearan (nelinearan) ni stacionaran (nestacionaran) sistem.
Zbog postojanja čoveka u samom sistemu svi ostali elementi se moraju prilagoditi na takav načinda budu kompatibilni sa čovekom. Za razliku od standardnih mehantronskih sistema kod kojih ponašanjeuglavnom predvidivo za sve sisteme iste klase sistema kod čoveka je jedinstveno za svaku jedinku i stalnose menja. Ovakvo ponašanje ljudskih bića i ţivih bića u opšte, dodatno oteţava projektvanje i primenutakvog sistema na veliki broj jedinki.
Da bi biomehatronski „efikasan“ u pogledu resursa (primena jedinstvenog rešenja na većem broju
ljudi) potrebno ga je projektovati tako da bude „robustan“. Pod pojmom robusnosti podrazumeva se da dati
sistem moţe odgovoriti na širok spektar zahteva (jednim ureĎajem moguće je lečiti veliki broj ljudi).
Elementi biomehatronike
Elementi biomehatronike su potpuno isti kao i elementi mehantronike, jedina je razlika u tome štose moraju prilagoditi ljudskom organizmu. Kod pneumatskih i hidrauličkih akutatora moguće je da doĎe do„zagaĎenja“ okoline u kojoj radi (šištanje vazduha iz pneumatske instalacije ili ispuštanje ulja izhidrauličkih instalacija) što je nedopustivo u medicinskoj primeni sa druge strane za funkcionisanje takvi h
sistema potrebno izvšiti prirpemu medijuma odnosno komprimovati vazduh i ulje do odgovarajućeg radnog pritiska. Zbog navedenih razloga ugalvnom se koriste električni akutatori (elektro-motori, linearni
električni aktuatori...). Senzori koji se koriste za očitavanja biosignala i ljudskih pokreta trebaju da budu
daleko kvalitetniji od senzora koji se koriste u mehatronici (primena kvalitetnih materijala od kojih seizgraĎuju koji nisu toksični za čoveka). Kod sistema upravljanja javlja se posebna grupa problema koja uosnovi ima nelinearnost, nestacionarnost i stohastičko biomehatronskih sistema. Teorija automatskogupravljanja je veoma dobro razvijena upravljanja linearnim sistemima, kod nelinarnih i/ili nestacionarnih
sistema poznata je teorija samo za odr eĎene klase sistema što dodatno oteţava sintezu sistema automatskogupravljanja.
I pored svih poteškoća biomahatronika je pronašla primenu u svakoj oblasti medicine: 1. Veštački udovi i zglobovi 2. Implantati (veštačka srca) 3. Biointerfejsi za dijagnostiku (EKG, EEG, EMG...)
4. Biosenzori (ultrazvučni radar za slepe sa audio- povratnom spregom, slušni aparati...) 5. Obrada biosignala
Slika 6. Primer biomehantronskog sistema.
-
8/17/2019 BMI 1 sazetak
8/15
MAŠINSKO INŽENJERSTVO U PRAKSI - MODUL ZA BIOMEDICINSKO INŽENJERSTVO
Handout, 2014-15
8
6. Neuronske stimulacije
7. Robotska hirurgij a (davinči robot, mikrohirurgij a...)
8. Odrţavanje ţivota (ureĎaji za dijalizu, pejsmejker...) 9. Medicinska slika (CT, MRI, PET skeneri, Endoskopi...)
10. UreĎaji za kretanje (električna kolica, egzoskeletoni)
11. Rehabilitacioni sistemi (fizioterapija, terapija nakon šloga...) 12. Buduće primene (veštačko oko, nano i mikro roboti, moţdane proteze...)
7. Praktična nastava modula za Biomedicinsko Inţenjerstvo - mašinstvo u praksi
7a. U saradnji sa Vojno-medicinskom akademijom (VMA) razvijen je prototip ureĎaja za korekcijudeformiteta kičmenog stuba sa akcentom na tretiranje skolioze. Potreba za razvijanjem ovakvog ureĎaja javila se usled sve većeg broja dece koja imaju pomenuti deformitet i manjka ureĎaja na trţištu koja bi
pomogla da im pomognu. Klasične terapeutske metode nisu se pokazale kao najbolje rešenje, a samim timse povećava i neophodan broj hirurških intervencija.
Skolioza je deformacija kičme koja se javlja u sve tri ravni (frontalnoj, sagitalnoj i horizontalnoj) iklasifikuje se prema stepenu krivine, smeru, lokaciji apeksa i etiologiji. Skolioza označava krivinukičmenog stuba u frontalnoj ravni, koja se karakteriše postraničnim iskrivljenjem jednog dela ili cele kičmesa ili bez rotacije. Ako je prisutna rotacija ršljenova ona se odvija tako što tela pršljenova idu na stranukoneksiteta, a spinalni nastavci na stranu konkaviteta.
SKOLIOKOREKT predstavlja novi terapijski program usmeren na pasivnu i aktivnu trodimenzionalnu
korekciju spinalnih deformiteta.
Pasivna korekcija se zasniva na korišćenju aparature za biomehaničku korekciju spinalnih deformiteta kojučini jedinica za doziranu korekciju deformiteta u horizontalnoj prostornoj ravni. Tretman je individualan,
izvodi se u kontrolisanoj, sigurnoj okolini uz pomoć dva fizioterapeuta i prema posebno kreiranom protokolu za potrebe ovog programa. Terapija se aplikuje tako što se pacijent postavlja u pronirani poloţaj,u fiksnom delu sprave za doziranu korekciju deformiteta u horizontalnoj prostornoj ravni. Nakon toga,
postojeće dve ''papučice'' tačnije jastučeta, aparata se postavljaju na paravertebralnu muskulaturunajprominentnijeg dela krivine deformiteta, levo i desno, koje deluju u suprotnim smerovima.
Mehaničkim horizontalnim pomeranjem ruke i stepenom kompresije ''papučica'', ostvarenim direktnimdejstvom fizioterapeuta, deformitet kičmenog stuba se potiskuje prema aksijalnoj osovini kičme i na tajnačin smanjuje Kobov (Cobb) ugao skolioze. Mehaničko horizontalno pomeranje ''papučica'' se vizuelnokontroliše od strane fizioterapeuta, a stepen kompresije se odreĎuje vizuelnom analognom skalom. Podostignutom ţeljenom stepenu kompresije nosač papučice se fiksira.
Slika 7. Šematski prikaz normalne anatomije kičmenog stuba i kičme sa degenerativnom promenom (skoliozom).
-
8/17/2019 BMI 1 sazetak
9/15
MAŠINSKO INŽENJERSTVO U PRAKSI - MODUL ZA BIOMEDICINSKO INŽENJERSTVO
Handout, 2014-15
9
Prag tolerancije na pritisak, takozvani “prag bola”, koji se ne prelazi u tretmanu, je ocena 6. Korigovani poloţaj se odrţava u trajanju od 10 do 45 minuta za obe jedinice. U osnovi ove biomehaničke korekcijedeformiteta jeste delovanje na komponente pasivne sta bilizacije kičmenog stuba, što je preduslov za
predstojeću mišićnu aktivnost. Projektni zahtevi
Sva dejstva, kako je već napomenuto, izraţavaju se subjektivnim osećajem. Kao takva ne mogu se uzeti
kao relevantni pokazatelji i ne predstavljaju čvrst oslonac u sprovedenim istraţivanja. U skladu sa tim
nametnula se potreba za definisanjem pomenutih veličina na prihvatljiv način odnosno uspostavljanje veze
izmeĎu subjektivnih osećaja i prisutnih fizičkih veličina.
32.vreteno za ugaono
pozicioniranje papučice čime se postiţe fino doziranje aplikovane
sile,
34. čaura-navrtka,
36.klizač kojim se dejstvo sa vretena
prenosi na ugaoni pomeraj papučice,
38.jastuče,
40.nosač jastučeta
Slika 9. Nosač papučice sa papučicom(konstrukcija sa VMA)
slika 8. Skica aparature za biomehaničku korekciju spinalnihdeformiteta (konstrukcija sa VMA)
l.noseća konstrukcija aparature,
2.i 3. klizači za poprečno
pozicionir anje nosača papučice,
8.i 9. klizači za uzduţno
pozicioniranje nosača papučice,
10.i 11. veze nosača papučica sa klizačima za uzduţno pozicioniranje,
12.i 13. nosači papučica,
14.poprečni nosač fiksatora za kukove,
15.poprečni nosač fiksatora za ramena,
20.i 21. fiksatori kukova,
22.i 23. fiksatori ramena,
24.potpora za kolena,25.potpora za torzo,
27.i 28. fiksatori nosača papučica,
30.i 31. točkići za fino doziranje
opterećenja, odnosno ugaono zakretanje ose papučice
-
8/17/2019 BMI 1 sazetak
10/15
MAŠINSKO INŽENJERSTVO U PRAKSI - MODUL ZA BIOMEDICINSKO INŽENJERSTVO
Handout, 2014-15
10
Dobijeni projektni zahtevi ogledaju se u sledećem:
1. aksijalnim pomeranjem nosača papučice, papučica se postavlja, pozicionira na ţeljeno mesto. Njom sevrši odreĎeni, inicijalni pritisak na telo. Potrebno je obezbediti merenje intenziteta sile kojom se vrši pritisak i njegovo doziranje.
2. pošto se papučica fiksira na ţeljeno mesto, terapeut vrši fino doziranje okretanjem točkića. Usled toga papučica se pomera u horizontalnoj prostornoj ravni u smeru ka kičmenom stubu ili od njega, vršeći pritisak na tretiranu regiju. Potrebno je omogućiti merenje intenziteta sile pritiska kojom se deluje na
tretiranu regiju i omogućiti njeno precizno doziranje.
Na osnovu analize projektnih zahteva definisani su sledeći zadaci:
1. odabir davača sile,
2. izrada elektronskog sklopa za pripremu signala sa davača sile,
3. dizajn digitalnog elektronskog ureĎaja za merenja, akviziciju, numerički i grafički prikazmerenih vrednosti,
4. programiranje digitalnog elektronskog ureĎaja za merenja, akviziciju, numerički i grafički
prikaz merenih vrednosti,
5. usvaj anj e tehničkih re šenj a
◦ kućišta,
◦ veza elemenata sistema,
◦ montaţe senzora na papučicama,
6. testiranje
◦ rezultati testiranja sa primećenim nedostacima,
◦ mere za otklanjanje evidentiranih nedostataka.
Analiza i odabir tehničkog rešenja davača sile zasnovani su na sledećim parametrima: • senzori/davači pritiska i sile raspoloţivi na trţištu, • dizajn aparature za biomehaničku korekciju spinalnih deformiteta,
Na osnovu sprovedene analize i projektnih parametara doneta je odluka da se za realizaciju projekta koriste
FlexiForce senzori sile, proizvoĎača Tekscan, USA.
Slika 10. Odabrani senzor, FlexiForce, Tekscan, USA
-Fizičke karakteristike odabranog senzora: a) Debljina 0.208 mm; b) Ukupna duţina 56.8 mm; Širina 31.8 mm;c) Osetljiva površina je kruţnog oblika prečnika 25.4 mm; d) Konektor je dvopolni, muški, sa razmakom od 2.54 mm.
-
8/17/2019 BMI 1 sazetak
11/15
MAŠINSKO INŽENJERSTVO U PRAKSI - MODUL ZA BIOMEDICINSKO INŽENJERSTVO
Handout, 2014-15
11
Odabrani senzor je rezistivnog karaktera odnosno pod dejstvom sile dolazi do promene otpora senzora tako
što se otpor smanjuje što je intenzitet sile veći. Mogu se koristiti za merenje kako statičkih tako i dinamičkih
opterećenja velikog raspona, i do 450 kilograma.Dizajn digitalnog ureĎaja za akviziciju izvršenih merenja, njihov vizuelni prikaz i skladištenje informacija za
dalju analizu se sastoji iz više faza:
1. odabir digitalnog elektronskog ureĎaja za obradu izmerenih signala koji se ujedno moţe iskoristiti iza vizuelnu prezentaciju merenih vrednosti. Vizuelni nadzor je od suštinskog značaja za kontrolu iosiguranje da se terapija sprovodi po tačno propisanoj proceduri,
2. dizajn grafičkog korisničkog okruţenja, interface-a (GUI),3. programiranje,
Slika 11. Fizički izgled kompleta za akviziciju, obradu, numerički i grafički prikaz merenih vrednosti Opcije
elektronskog ureĎaja za merenja, akviziciju, numerički i grafički prikaz merenih vrednosti, od značaja za
realizaciju rešenja;
• TFT displej osetljiv na dodir, 256K boja, dijagonale ekrana 4.3“ ,
rezolucije 480x272 piksela,• USB komunikacija,• microSD card.
Po uključenju ureĎaja aktivira se glavni ekran koji se dalje koristi za navigaciju kroz realizovane module.
Lista modula je prestavljena u vidu tastera. Aktiviranje odreĎenog modula vrši se pritiskom na poljedefinisano samim tasterom. Redosled tastera u listi odgovara proceduri koju treba proći pri svakom odmerenja.
Parametri sistema koji se mogu podesiti pomoću ovog modula su:
• vreme uzorkovanj a ts [sec],
• traj anj e ciklusa tc [min],
• sila praga bola Fpb[N],
Parametri koji su podešeni interno, programom, i čije vrednosti operater moţe samo videti ali ne i promeniti su:
• sila zasićenja Fsat[ADC],
• broj ač merenj a BM.
-
8/17/2019 BMI 1 sazetak
12/15
MAŠINSKO INŽENJERSTVO U PRAKSI - MODUL ZA BIOMEDICINSKO INŽENJERSTVO
Handout, 2014-15
12
Sledeći po redu je modul kalibracije. Ovaj modul je potrebno aktivirati pre svakog merenja kako bi se
odradilo anuliranje sila na papučicama, u cilju obezbeĎivanja što tačnijih merenja.
Slika 12. Primer izgleda glavnog ekrana za navigaciju kroz program, modula za podešavanje, modula za kalibraciju i modula
za merenje
Poništavanje sila na papučici, kada iste nisu u radnom reţimu već u nultom poloţaju, vrši se:
• odabirom opcije ”nulovanje”, • aktivacijom opcije “očitaj”,
• aktivacijom opcije “kalibriši”,
Hepravilno odraĎeno “nulovanje” i definicija prenosnih karakteristika papučica, u modulu za kalibraciju,
direktno utiče na tačnost merenih veličina.
Kao jedna od kontrolnih tačaka da je kalibracija odraĎena zadovoljavajuće je brojna vrednost sila koja se prikazuje u modula za merenje kada su papučice u nultom, neaktivnom, poloţaju. Ta vrednost treba da jenula, u pomenutim uslovima.
Po aktiviranju modula za merenje odmah se vrši očitavanje vrednosti sila na papučicama i brojčano se prikazuju na vrhu ekrana. Inicijalno grafički prikaz nije aktivan kao ni odbrojavanje vremena trajanjaciklusa.Aktiviranjem opcije “start” :
• aktivira se ciklus, počinje odbrojavanje vremena trajanja ciklusa, što se i vizuelno prikazuje
zelenom linijom u vrhu ekrana. Širina ekrana u tom slučaju predstavlja vreme trajanja ciklusa takoda se vizuelno moţe imati pregled koliko od ciklusa je prošlo i koliko još ostaje. Ova opcija je
ubačena jer ciklusi mogu trajati i do 45 minuta.
• aktivira se grafički prikaz promene sila, usvojeno je da se izmerena sila na levoj papučici prikazujeu levoj polovini ekrana plavom bojom a izmerena sila na desnoj papučici u desnoj polovini ekrana
ţutom bojom. • aktivira se snimanje izmerenih vrednosti.
• CSV datoteka pretstavlja tekstualni fajl ali formatiran na način koji je prepoznatljiv programima za
tabelarna preračunavanja, tako da se lako isti moţe otvoriti u cilju dalje obrade.
-
8/17/2019 BMI 1 sazetak
13/15
MAŠINSKO INŽENJERSTVO U PRAKSI - MODUL ZA BIOMEDICINSKO INŽENJERSTVO
Handout, 2014-15
13
• Usvojena šema datoteke je sledeća: prva dva reda predstavljaju zaglavlje, u prvom redu je naziv
polja iz zaglavlja a u drugom njihove vrednosti. U zaglavlje su uneti parametri ciklusa definisani
modulom podešavanj a.
Nakon zaglavlja ubačena su dva prazna reda, radi estetike. Odmah za tim, u tri kolone unose se merenja
tako što se u prvu kolonu unosi vreme kada je uzeta vrednost dok se u drugoj i trećoj koloni upisuju očitane
vrednosti za sile u levoj i desnoj papučici, respektivno.
7b. OPTO-MAGNETNA IMIDŢING SPEKTROSKOPIJA (OMIS)
Pod pokroviteljstvom Ministarstva prosvete, nauke i tehničko-tehnološkog razvoja startovao je nacionalni
projekat pod nazivom „Razvoj novih metoda i tehnika za ranu dijagnostiku kancera grlića materice,
debelog creva, usne duplje i melanoma na bazi digitalne slike i ekscitaciono – emisionih spektara u
vidljivom i infracrvenom domenu“. Cilj datog projekta je razvoj nove neinvazivne metode za ranu
dijagnostiku karcinoma koja bi dostigla pouzdanost oko 95 % u odnosu na histopatološku analizu.
Novonastala metoda pod nazivom Opto-magnetna imidţing spektroskopija moţe biti iskorišćena za
poboljšanje skrininga, a kasnije za monitoring i dijagnostikovanje u cilju smanjenja incidence obolelih od
karcinoma.
Opto-magnetna imidţing spektroskopija (OMIS) je metoda bazirana na interakciji elektromagnetnog
zračenja sa valentnim elektronima materije. Metoda koristi svetlost kao mernu sondu kojom se ispituju
osobine tkiva, iz razloga što je foton veoma pogodan senzorski entitet sa kojim se moţe ostvariti dovoljna
osetljivost i neinvazivnost pri interakciji svetlosti sa materijom. Koristi se bela difuzna svetost talasne
duţine u rasponu od 400-700nm (vidljivi domen), što omogućava dobijanje informacija o višim nivoima
organizacije bioloških makomolekula. OMIS metoda je zasnovana na razlici difuzno reflektovane belesvetlosti i polarizovano reflektovane bele svetlosti. Polarizovano reflektovana svetlost nastaje kada upadni
fotoni dodju do uzorka pod Brusterovim uglom, interaguju sa uzorkom i reflektuju se od njega. Razlika
odziva bele i reflektovane polarizovane svetlosti daje magnetnu komponentu, jer dolazi do oduzimanja
električnog od elektromagnetnog dejsta (slika 13.).
Slika 13. Izgled CSV, datoteke
Slika 13. Šematski princip rada metode opto-magnetne imidţing spektroskopije
-
8/17/2019 BMI 1 sazetak
14/15
MAŠINSKO INŽENJERSTVO U PRAKSI - MODUL ZA BIOMEDICINSKO INŽENJERSTVO
Handout, 2014-15
14
Metoda koristi sistem boja koji odgovara vizuelnoj percepciji ljudskog oka i sastoji se iz crvene (R), zelene
(G) i plave (B) boje. Algoritam obrade slike i dobijanje hromatske informacije zasnovan je na dijagramu
hromatičnosti (Maksvelov trougao) pri operaciji spektralne konvolucije u odnosu na plavi (B) i crveni (R )
kanal u oznaci
(R -B)&(W-P).
Oznaka predstavlja operaciju konvolucije difuzne bele (W) i difuzne reflektovane polarizovane (P)
svetlosti plavih (B) i crvenih (R ) kanala čime se formira konvolucioni spektar nakon čega se iz razlike
konvolucionih spektara reflektovane bele i polarizovane svetlosti dobijaju optomagnetni konvolucioni
spektri.
Uredjaj (slika 14) upotrebljen za realizaciju metode sastoji se iz standardnog digitalnog foto-aparata marke
CANON (model IXUS 105, 12.1MP) i svetlosnog izvora smeštenog u specijalno dizajniranom dodatku gde
je smešten i objektiv. Dodatak sadrţi šest dioda za osvetljavanje uzorka koje je obezbedjeno korišćenjem
bele svetosti. Vidno polje za snimanje uzoraka je kruţnog oblika, prečnika 25mm.
Slika 14. Uredjaji izradjeni za potrebe snimanja u in vitro (NanoLab, MF Beograd)
Postupak snimanja se sastoji iz: 1- osvetljavanja uzorka belom difuznom svetlošću; 2- akvizicije prvog
digitalnog snimka; 3- osvetljavanja uzorka belom difuznom svetlošću pid Brusterovim uglom i 4-
akvizicije drugog digitalnog snimka. Nakon snimanja sledi postupak spektralne obrade slike u tri faze:
1- u prvoj fazi iz snimaka se izdvaja (crop) regija od interesa u Adobe Photoshop softveru, na kojoj se
sprovode dalje operacije;
2- u drugoj fazi vrši se konvolucija spektara, obrada podataka u NL-algoritmu za programski paketMATLAB;
3- u trećoj fazi se izlazna informacija generiše iz histograma i vrši analiza spektara klasifikacijom
podataka po intenzitetima i talasnim duţinama.
Metodom se dobija paramagnetno/dijamagnetno stanje tkiva, koje je odredjeno dinamikom sparivanja i
rasparivanja valentnih elektrona, jon-jon interakcijama, vodoničnim vezama i nastajanjem/raskidanjem
permanentnih i indukovanih dipola, tj. dobijaju se informacije o konformacionim promenama površine i
slojeva snimanog uzorka.
Studija se sprovedi u saradnji sa Medicinskim fakultetom Univerziteta u Beogradu, a dobijeni rezultati na
osnovu trenutnog rada ukazuju da je OMIS metodom moguće k lasifikovati zdravo i tkivo zahvaćeno
malignom promenom (slika 15,16). Posmatrajući date dijagrame uočava se značajna razlika u aktivnostizdravog i tkiva sa malignom promenom u paramagnetnoj i dijamagnetnoj oblasti.
-
8/17/2019 BMI 1 sazetak
15/15
MAŠINSKO INŽENJERSTVO U PRAKSI - MODUL ZA BIOMEDICINSKO INŽENJERSTVO
Handout, 2014-15
15
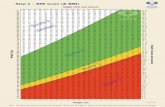
Slika 15,16. Grafički prikaz dijagrama sa kojih se očitavaju rezultati (levo – razlika zdravog i tkiva zahvaćenog tumorom, desno –
razlika izmeĎu grupa za dijagnostikovanje karcinoma grlića materice).






![BM1弾 カードチェックリスト · 2020-06-17 · 1.89 d bmi-scp4[cp1 c] bmi-scp8[cp] bmi-hcpi bmi-scps[cpi a bmi cl bmi-scpi c] bmi-scp5[cp] c] bmi-cpi [cpi 12 bmi-cp2tcp]](https://static.fdocuments.net/doc/165x107/5f0d11867e708231d43885ac/bm1-fffffff-2020-06-17-189-d-bmi-scp4cp1-c-bmi-scp8cp.jpg)