
BME 6938 Neurodynamics
38
BME 6938 Neurodynamics Instructor: Dr Sachin S Talathi
-
Upload
deirdre-breslin -
Category
Documents
-
view
72 -
download
0
description
BME 6938 Neurodynamics. Instructor: Dr Sachin S Talathi. Recap. One Dimensional Flow: Bifurcations, Normal form, Stability One dimensional neuron model: Inward activation Inward Inactivation Outward Activation Outward Inactivation XPPAUTO for neuron modeling Auto - PowerPoint PPT Presentation
Transcript of BME 6938 Neurodynamics

BME 6938Neurodynamics
Instructor: Dr Sachin S Talathi

Recap One Dimensional Flow: Bifurcations, Normal
form, Stability One dimensional neuron model:
Inward activation Inward Inactivation Outward Activation Outward Inactivation
XPPAUTO for neuron modeling Auto Bifurcation diagram, bistability, hysterisis

Two Dimensional Dynamical Systems Also called planar systems f and g describe the evolution of two-
dimensional state variables: x(t), y(t) f and g are vector fields that describe how the
trajectory will evolve

Two dimensional vector fields:

Nullclines Nullclines are curves along which the vector
fields are completely horizontal or completely vertical
The set of points where the vector field changes its horizontal direction defines the x-nullcline
x-nullcline partitions the phase space into two parts where either x increases or x decreases
x-nullcline is defined through
Similarly y-nullcline is defined through

Example Consider the following two dimensional ODE
Draw the nullclines for the dynamical system. Infer the stability of the fixed point from the phase plot by looking at the evolution of the vector field

XPPAUTO to see Nullclines/Direction Fields of a Neuron Model
V-Nullcline
n-Nullcline
Setting up XppAuto for TwoD-Neuron Model (Ex3.ode) The ODE file: Copy the ode file from course website
(Ex3.ode) Neglect the comment in the ode file on type-1 and
type-II dynamics for now. We will look into it later in the class.
For time being select the parameters for type-1 dynamics
In the nUmerics menu select Dt=0.1; Total Time=100; Bounds=1000
Go to main menu and press (W)(W) to set X-axis:[0 100] and y-axis [-80 120]
Click (H)(C) to open a new plot window. Click (v)(2d) to set the axes: x-axis -80:100 y-axis:-.5:1
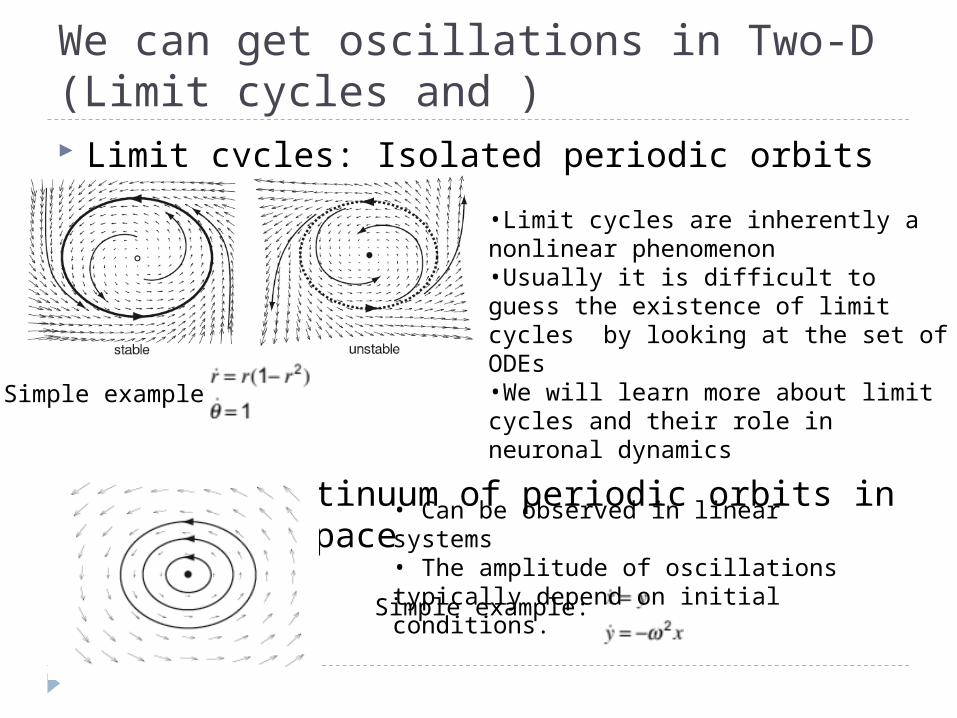
We can get oscillations in Two-D (Limit cycles and ) Limit cycles: Isolated periodic orbits in the
phase space
Center: Continuum of periodic orbits in the phase space
•Limit cycles are inherently a nonlinear phenomenon•Usually it is difficult to guess the existence of limit cycles by looking at the set of ODEs •We will learn more about limit cycles and their role in neuronal dynamics
• Can be observed in linear systems• The amplitude of oscillations typically depend on initial conditions.
Simple example
Simple example:

Relaxation oscillators: Intuitive way of thinking about the origin of spikes by neurons
•Relaxation oscillators are special because of huge separation of time scales •Neurons also exhibit fast and slow time scales•Neurons are not relaxation oscillators, because mu is not small enough;•There is finite rise time for membrane potential •Time permitting we will consider relaxation oscillators in details when we study bursting neuron models

Recap Two Dimensional Flow Direction Field; Nullclines Mentioned limit cycles in passing (closed
trajectories in phase space) XPPAUTO to draw nullclines and direction
fields.

Phase portrait for two dimensional system: General Features
AB
CD
Fixed points A, B and C satisfy
D represents a closed trajectory; solution for which
Two Dimensional Phase PortraitAdditonal Properties Trajectories in phase portrait do not cross
each other (Consequence of existence and uniqueness
property of solution for initial value problem in dynamical systems)
Fate of a trajectory enclosed in a close in a closed orbit Poincare-Bendixon Theorem: If a trajectory is
enclosed by a closed orbit and there is no fixed point inside the trajectory, then the trajectory will eventually approach the closed orbit
Also tells us that a closed orbit encloses a fixed-point (Another theorem, btw)

Two Dimensional Linear systems
With initial conditions
General solution is
A is constant matrix

Simple example
Uncoupled two-d system
where
Solution:

Phase portrait-Bifurcation
Trajectory approaches the stable fixed point in direction tangent to the slower axis

General Case: Some Linear Algebra
Diagonalize A: where
OR
=2x2 diagonal matrix

What choice for P will diagonalize A?
Select P to be the eigen-vector of A that satisfies the following linear equation
Eigen value of A
Eigen vector of A
Find eigen vectors and eigen values by solving the characteristics equation

3 possibilities
OR

Choice of for three cases considered
Case I.
We have:

Example
Eigen values are:
Eigen vectors are:
For a general invertible 2x2 matrix
Easy to show
The solution to

Complex conjugate eigen-values Case II Claim: There exists P such that
Let z be a complex eigenvector of A such that
Let

Example
Eigen values are:
Eigen vectors corresponding to is The solution to
&
Verify and show
Degenerate eigenvalues Case III. Trivial case: for
any choice of e1 and e2
Nontrivial case: There exists matrix P=[v1 v2] such that
Note:If we are willing to work with complex eigen vectors then it is possible to diagonalize any matrix A with distinct eigen values

Example
Eigen values are:
&
Verify and show
Lets choose
Note:

Intuitive way to think of degenerate case The trajectories are almost trying to spiral into
the fixed point (if stable) but do not quite make it
It represents a border line case between a node and spiral

Classification Scheme for fixed points We saw how to get explicit solution to any 2-
dimensional linear ODE. However if we are interested in global
properties of the trajectories: explicit solutions are unnecessary
The eigen values of A give us all the information about the stability properties of the fixed points of the system and we can devise classification scheme based on the eigenvalues for the system

Classification Scheme for fixed points
•Case I: saddle node•Case II:
•(a) either stable or unstable node•(b) either stable or unstable spiral•(c) border line between nodes and spirals
•Case III: one of the eigenvalues is zero; no isolated fixed point but a series of fixed points (centers)

Summary of the classification scheme
centers
Degenerate nodes
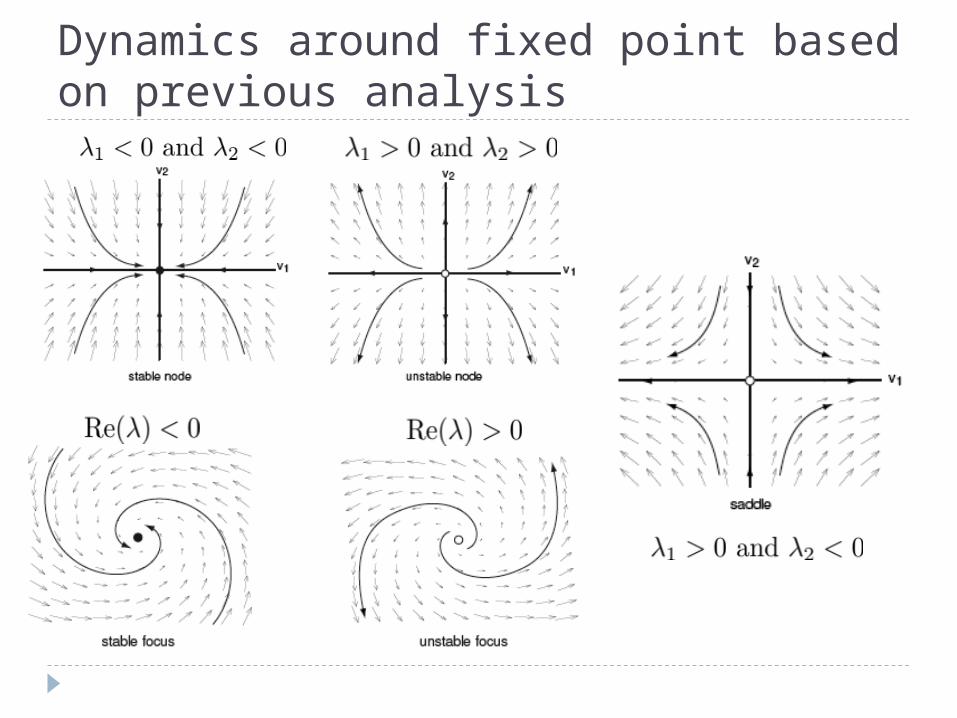
Dynamics around fixed point based on previous analysis
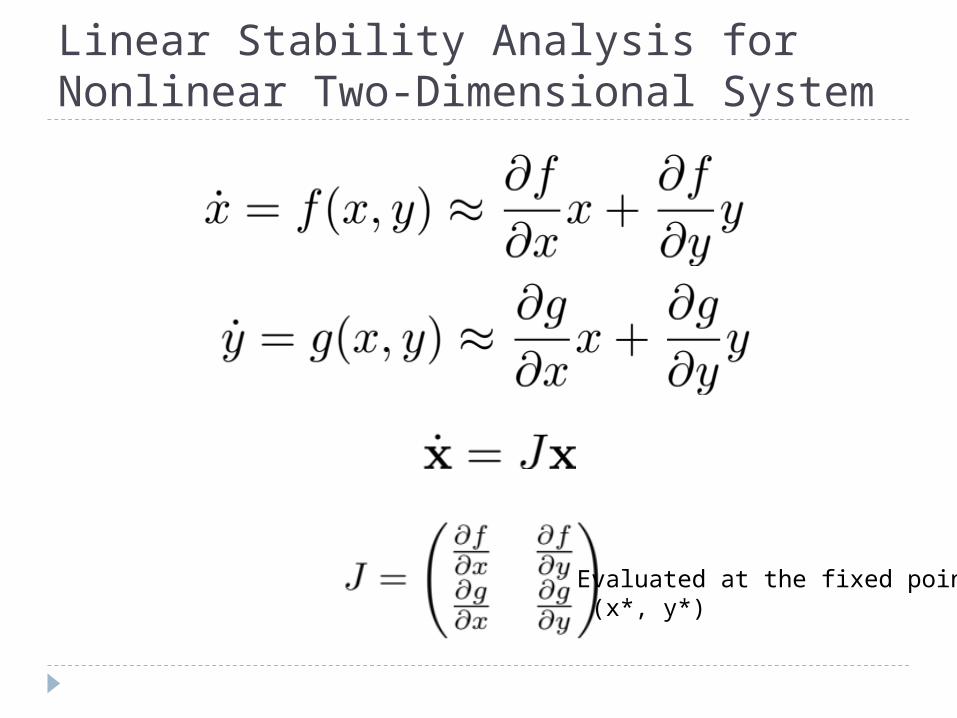
Linear Stability Analysis for Nonlinear Two-Dimensional System
Evaluated at the fixed point (x*, y*)

Few comments The Linearized system does represent the
dynamics of the nonlinear system locally around the fixed point correctly (Stable manifold theorem or the Hartman-Grobman Theorem) when the real part of eigenvalues are non-zero.
Fixed point in these case are referred to as the hyperbolic fixed points. The contribution from nonlinear higher order terms is negligible locally around hyperbolic fixed points.
Nonhyperbolic fixed points are those for which the real part of eigenvalue is zero. They are more sensitive to higher order nonlinear terms eg: Center’s Bifurcation points etc..

Invariant Manifolds The eigenvectors of A corresponding to the cases
with non-degenerate eigenvalues considered earlier represent invariant manifolds for the dynamical system.
Eg. Lets say the phase space is 2 dimensional made up of dynamical variables x and y. If initial condition is on x-axis and the flow as the system evolves remains on x-axis then x-axis is the invariant manifold of the dynamical system.
In other words, orbits that start on the manifold remain in it.

Examples of Invariant Manifold Invariant manifolds of saddle (1-Dimensional
manifolds) Spirals (II-Dimensional manifolds)

Stable and Unstable Manifolds of Saddle
Unstable manifold: v1
Stable manifold: v2
Stable manifold of saddle is also referred to as the seperatrix; since it separatesthe phase plane into different regions of long term behavior

Revisit a simple example
We saw the phase space for this system earlier in our class. Lets Revisit and now Identify the stable and unstable manifolds of the saddle node (This time using XPPAUTO)
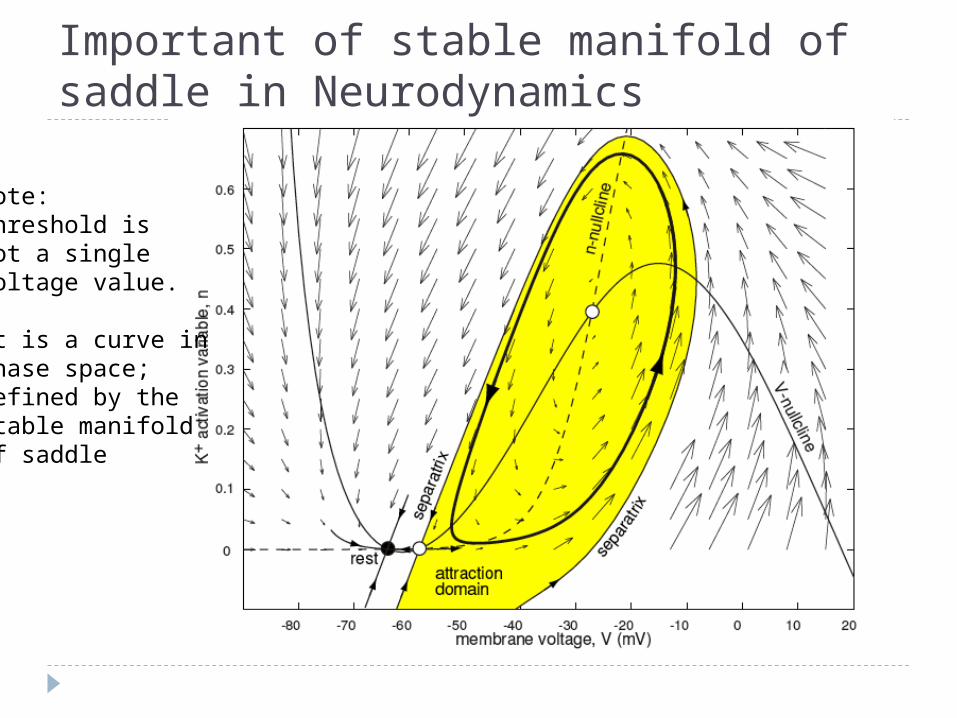
Important of stable manifold of saddle in Neurodynamics
Note:Threshold is not a singlevoltage value.
It is a curve inPhase space;defined by the Stable manifold Of saddle

Homoclinic and Heteroclinic Trajectories
A trajectory is homoclinic if it originates from and terminates at the same equilibrium point
A trajectory is heteroclinic if it originates at one equilibrium and terminates at a different equilibrium point




![An Effective Routing Algorithm with Chaotic Neurodynamics ...otic neurodynamics [14-20]. Chaotic neurodynamics ex- hibits a high ability to solve the various combinatorial optimization](https://static.fdocuments.net/doc/165x107/5f7460be25a1e07dee1d0a22/an-effective-routing-algorithm-with-chaotic-neurodynamics-otic-neurodynamics.jpg)













