Biomechanics - Dynamic
23
Disciplina de BIOMECÂNICA DO MOVIMENTO Mestrado Integrado em ENGENHARIA BIOMÉDICA 4º Ano, 1º Semestre, 2011 1 AS AERPROJECTO DE BIOMECÂNICA DE MOVIMENTO PARTE II: ANÁLISE DINÂMICA DA MARCHA HUMANA Diana Santos*, Joana Paulo**, Marta Ornelas*** e Rui Pinto **** * Mestrado Integrado em Engenharia Biomédica Instituto Superior Técnico-Departamento de Bioengenharia Av. Rovisco Pais, 1049-001 Lisboa email: [email protected] ** Mestrado Integrado em Engenharia Biomédica Instituto Superior Técnico-Departamento de Bioengenharia Av. Rovisco Pais, 1049-001 Lisboa email: [email protected] ***Mestrado Integrado em Engenharia Biomédica Instituto Superior Técnico-Departamento de Bioengenharia Av. Rovisco Pais, 1049-001 Lisboa email: [email protected] **** Mestrado Integrado em Engenharia Biomédica Instituto Superior Técnico-Departamento de Bioengenharia Av. Rovisco Pais, 1049-001 Lisboa email: [email protected] Palavras-chave: Biomecânica, Modelo Antropométrico Marcha, Dinâmica, Electromiografia, MATLAB ® , Vetor dos Multiplicadores de Lagrange, Estabilização de Baumgarte. Resumo. Nesta segunda parte da análise do movimento humano teve-se por objectivo o estudo da dinâmica do modelo de corpos múltiplos. Foram recolhidos os dados cinemáticos, dinâmicos e eletromiográficos do modelo em estudo, num laboratório de Marcha, através de câmaras infravermelho (IV) e plataformas de força. Estes foram posteriormente tratados e submetidos a simulação computacional através do algoritmo criado na primeira fase do projecto. A análise dinâmica direta consiste na adição de informação sobre as características inerciais de cada segmento ao modelo, tal como as forças de reação no chão, o que permitiu, por meio do vector dos multiplicadores de Lagrange, obtido obter as forças de reação e momentos articulares, bem como as já habituais posições, velocidades e acelerações.
-
Upload
joana-paulo -
Category
Documents
-
view
467 -
download
0
description
Evaluation of Dynamic human Movements
Transcript of Biomechanics - Dynamic

Disciplina de BIOMECÂNICA DO MOVIMENTO
Mestrado Integrado em ENGENHARIA BIOMÉDICA
4º Ano, 1º Semestre, 2011
1
AS AERPROJECTO DE BIOMECÂNICA DE MOVIMENTO
PARTE II: ANÁLISE DINÂMICA DA MARCHA HUMANA
Diana Santos*, Joana Paulo**, Marta Ornelas*** e Rui Pinto ****
* Mestrado Integrado em Engenharia Biomédica
Instituto Superior Técnico-Departamento de Bioengenharia
Av. Rovisco Pais, 1049-001 Lisboa
email: [email protected]
** Mestrado Integrado em Engenharia Biomédica
Instituto Superior Técnico-Departamento de Bioengenharia
Av. Rovisco Pais, 1049-001 Lisboa
email: [email protected]
***Mestrado Integrado em Engenharia Biomédica
Instituto Superior Técnico-Departamento de Bioengenharia
Av. Rovisco Pais, 1049-001 Lisboa
email: [email protected]
**** Mestrado Integrado em Engenharia Biomédica
Instituto Superior Técnico-Departamento de Bioengenharia
Av. Rovisco Pais, 1049-001 Lisboa
email: [email protected]
Palavras-chave: Biomecânica, Modelo Antropométrico Marcha, Dinâmica, Electromiografia,
MATLAB®
, Vetor dos Multiplicadores de Lagrange, Estabilização de Baumgarte.
Resumo. Nesta segunda parte da análise do movimento humano teve-se por objectivo o
estudo da dinâmica do modelo de corpos múltiplos. Foram recolhidos os dados cinemáticos,
dinâmicos e eletromiográficos do modelo em estudo, num laboratório de Marcha, através de
câmaras infravermelho (IV) e plataformas de força. Estes foram posteriormente tratados e
submetidos a simulação computacional através do algoritmo criado na primeira fase do
projecto. A análise dinâmica direta consiste na adição de informação sobre as características
inerciais de cada segmento ao modelo, tal como as forças de reação no chão, o que permitiu,
por meio do vector dos multiplicadores de Lagrange, obtido obter as forças de reação e
momentos articulares, bem como as já habituais posições, velocidades e acelerações.

Santos, D. Paulo, J. Ornelas, M. e Pinto, R.
2
1. INTRODUÇÃO
1.1. Perspectiva Histórica
A antiguidade grega destaca-se pela crescente curiosidade pelo o corpo e o movimento
humano. É desta época que remontam os primeiros estudos da mecânica de sistemas vivos,
sendo que os principais contribuidores para o avanço no conhecimento sobre esta temática
foram Hipócrates, Aristóteles, Herófilos e Galeno. Já na época do renascimento, Da Vinci e
Vesalius deixaram um vasto legado de apontamentos para a biomecânica.
No século XVII inicia-se a revolução científica e com ela o contributo de Galileu (por
muitos considerado como o pai da biomecânica), Descartes e ainda Borelli (elo entre as
ciências físicas e a fisiologia). No final do renascimento surge Newton que enunciou as
conhecidas e extremamente importantes leis fundamentais da mecânica, resultando na síntese
de tudo o que se tinha descoberto até à data na área da mecânica. Estas leis são cruciais para a
análise cinemática e dinâmica de qualquer sistema biomecânico. No século XVIII, no
iluminismo, os grandes matemáticos Euler, Alembert e Lagrange preencheram algumas
lacunas que ficaram da revolução científica, sendo as suas metodologias ainda hoje utilizadas.
No século XX, mais propriamente em 1978, Hay descreve a Biomecânica como sendo a
ciência que estuda as forças internas e externas que actuam no corpo humano e os efeitos
produzidos por essas forças. Ou seja, esta definição mais não será que uma adaptação da
definição de mecânica mas, desta feita, aplicada a sistemas biológicos, neste caso o corpo
humano.
Segundo Amadio (1989; 1996), a Biomecânica interna preocupa-se com a determinação
das forças internas e as consequências resultantes dessas forças. Já a Biomecânica externa
representa os parâmetros de determinação quantitativa ou qualitativa referentes às mudanças
de lugar e de posição do corpo, ou seja, refere-se às características observáveis exteriormente
na estrutura do movimento.
Embora o andar seja um movimento inconsciente e quase automático, é altamente
complexo, pois exige a perfeita harmonia do corpo, contrapondo as forças externas que estão
em constante acção sobre nossos segmentos. Para a análise biomecânica são necessários a
descrição e o cálculo das forças que produzem o movimento. A parte da mecânica que
descreve os movimentos da marcha são os dados temporais, espaciais e cinemáticos. As
variáveis cinemáticas incluem aceleração, velocidade e deslocamento angular. O
deslocamento angular descreve as amplitudes dos movimentos articulares durante a marcha.
O estudo das forças que agem no nosso corpo é denominado dinâmica. As variáveis
cinéticas incluem as forças de reacção do solo, os momentos de força, potência e trabalho das
articulações durante o movimento. O momento de força caracteriza o somatório das forças
dos músculos, tendões, ligamentos e ossos que agem internamente para opor as forças
externas que agem sobre o nosso corpo.

Santos, D. Paulo, J. Ornelas, M. e Pinto, R.
3
1.2. Plataformas de Força, Tapetes de Pressão e Aquisição de Movimento
A análise dinâmica do movimento humano é efectuada através de aquisições de cinemática
e cinética do movimento, de electromiografia muscular e de antropometria individual. Para
tal, é necessário realizar a análise num laboratório de biomecânica devidamente equipado com
antropómetros, câmaras ópticas, plataformas de forças, electromiógrafos e centro de
processamento.
A captura de movimentos pode ser realizada por sistemas ópticos ou não ópticos. Como
sistemas não ópticos, têm-se os sistemas de inércia, mecânicos e magnéticos. Quanto aos
sistemas ópticos, utilizam-se geralmente marcadores especiais, que permitem que um
conjunto de câmaras de captura de imagem em tempo real identifique várias posições
específicas, e acompanhe a sua evolução temporal. É efectuada, uma triangulação do sinal das
várias câmaras para se obter a imagem tridimensional. Isto já pode, no entanto, ser feito sem
recurso a marcadores, mas sim com software próprio que identifica várias regiões específicas
do corpo humano e procura acompanhar o seu movimento.
Os marcadores utilizados para este fim também podem apresentar diferentes
características, considerando-se marcadores activos, passivos, activos modulados no tempo e
imperceptíveis semi-passivos. Os marcadores passivos utilizam material reflector, que reflecte
a luz emitida pelo flash de uma câmara. Por sua vez, os marcadores activos funcionam por
emissão de luz por LED’s, cada um com uma frequência própria. Estes podem ser melhorados
se com a amplitude do sinal emitido for modulado no tempo, dando assim uma identidade
própria a cada marcador.
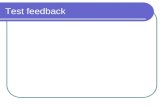
Para se fazer a determinação das reacções exercidas pelo chão recorre-se a plataformas de
força. As plataformas de força mais simples utilizam apenas uma placa de força ligada a um
transdutor. Na figura 1 é possível visualizar um tipo de plataforma de força, bem como o
género de marcadores reflectores utilizados.
Figura 1. Plataforma de força (à esquerda centro) e marcadores reflectores (à
direita)

Santos, D. Paulo, J. Ornelas, M. e Pinto, R.
4
1.3. Antropometria
No contexto da biomecânica, a história da antropometria remonta à necessidade em
determinar o centro de massa ou de gravidade do corpo ou de um segmento e o momento
principal de inércia. Os principais colaboradores são apresentados na figura 2.
Com Borelli surgiu a necessidade de descobrir o centro de centro de gravidade do corpo e
desde então a evolução histórica da antropometria está associada à evolução de seus métodos
de investigação para a determinação das características e propriedades da massa corporal
humana. A figura 3 apresenta a medição de determinados segmentos, sendo elementos
fulcrais para a Biomecânica.
Figura 2. Evolução Histórica da Antropometria
Figura 3. Medição de pontos antropométricos.

Santos, D. Paulo, J. Ornelas, M. e Pinto, R.
5
Do ponto de vista teórico, a antropometria é importante no estudo de posturas e
movimentos do corpo humano, agrupando indivíduos, não só pelas características físicas,
como altura e peso, mas também por características demográficas, como sexo, idade ou raça,
sendo os dados fornecidos por modelos deste tipo extremamente úteis para análises
biomecânicas do movimento humano, como a que se pretende realizar neste trabalho.
2. METODOLOGIA
2.1. Métodos Teóricos
Para a realização deste trabalho, foram utilizados alguns conceitos teóricos de modo a
utilizar os dados obtidos no laboratório da marcha de modo a alcançar os objectivos desta 2º
parte do projecto.
2.1.1. Princípio das Potências Virtuais
O primeiro conceito a reter, é o do Princípio das Potências Virtuais que descreve o
movimento de um modelo biomecânico constituído por vários corpos rígidos ligados por
juntas cinemáticas e onde actuam forças exteriores, através da equação,
(1)
Onde o vector f é a resultante da aplicação de todas as forças exteriores, incluindo as de
inércia dependentes da velocidade, tal como se pode verificar pela equação,
(2)
Em que M é a Matriz de massas globais do sistema, o vector de acelerações naturais e g
o vector das forças exteriores.
Por outro lado, é um vector de velocidades virtuais, isto é, um conjunto de velocidades
fictícias num dado instante de tempo estacionário e que pertencem ao espaço nulo da matriz
Jacobiana (Φq), tal como ilustra a equação (3),
(3)
No entanto, num sistema multicorpo, a Potência Virtual é nula, resultando na equação (4),
no entanto esta expressão não abrange as forças internas associadas aos constrangimentos
cinemáticos dado que estas por serem um pares acção-reacção não produzem potência virtual.
Dado que é necessário introduzir estas forças nas equações do movimento do sistema,
utiliza-se o Método dos Multiplicadores de Lagrange.
(4)
Este método consiste num modelo matemático que estabelece uma expressão analítica para
o cálculo das forças internas associadas aos constrangimentos cinemáticos do sistema.
No modelo utilizado, as forças internas são calculadas com a direcção das violações de
constrangimento (dada pelas linhas da matriz Jacobiana) e magnitude λ, que tem um valor

Santos, D. Paulo, J. Ornelas, M. e Pinto, R.
6
desconhecido.
(5)
Onde o vector λ designa-se por vector de multiplicadores de Lagrange e agrupa todas as
magnitudes que se pretende determinar os valores.
Analisando as equações (3), (4), e (5) confirma-se que as forças internas associadas aos
constrangimentos cinemáticos não produzem potência virtual realçando o significado físico de
λ. Tendo em conta este facto, é possível então inserir (5) em (4), para que se possa considerar
as forças internas na Potência Virtual de um sistema multicorpo, sem alterar o resultado,
obtendo:
(6)
Para que a potência virtual seja nula, tem de se verificar a condição:
(7)
É através da equação (7) que se determina o vector λ, e para tal é necessário conhecer
previamente os valores de M (matriz de massas globais do sistema), (vector das acelerações
generalizadas), g (vectores das forças externas generalizadas e (matriz jacobiana dos
constrangimentos).
2.1.2. Equações do Movimento do Sistema (Resolução e Estabilização)
A equação (7) apresenta nc equações e nc+nh incógnitas, pelo que para que seja possível
resolver o problema, é necessário determinar nh equações, provêm da análise cinemática:
(8)
Com as equações (7) e (8), é definido um sistema de equações diferenciais algébricas, que
se verifica ser um sistema de difícil resolução, razão pela qual o termo algébrico é
frequentemente substituído pelas equações de cinemática de aceleração:
(9)
Esta substituição resulta num sistema na forma matricial e que se designa por Equações
Diferenciais Ordinárias, que podem ser resolvidas numericamente utilizando um integrador
numérico apropriado.
(10)
Para a resolução deste sistema, utiliza-se o Problema de Valor Inicial, tendo em
consideração o Método da Integração Directa.
Tendo em conta a velocidade inicial, , tem-se

Santos, D. Paulo, J. Ornelas, M. e Pinto, R.
7
(11)
Recorrendo então ao método de integração directa é possível obter a velocidade e posição
do instante pretendido.
(12)
Após esta sequência de passos, é então possível obter o sistema para o instante de tempo
pretendido, recorrendo ao seguinte vector:
(13)
A parte algébrica das equações do movimento tem a forma:
(14)
Isto faz com que o sistema de equações diferenciais seja instável, fazendo com que o
método de integração directa comece a divergir e que o objectivo de integrar estas equações
comece a falhar.
Para resolver este problema, basta fazer uma substituição da equação instável (14) por uma
equação estável (15).
(15)
Em que α e β são constantes reais de valor arbitrário, usualmente entre 10 e 50.
Este método denomina-se Estabilização de Baumgarte e baseia-se na teoria de
Realimentação.
Desta substituição, resulta um novo vector gama modificado, denominado , e que é obtido
a partir de:
(16)
Com isto, obtém-se então a forma final das equações de movimento de um sistema
multicorpo na forma estável:
(17)
2.1.3. Matriz de Massa do Sistema
O cálculo da matriz de massa do sistema, ao contrário do apresentado até agora, depende

Santos, D. Paulo, J. Ornelas, M. e Pinto, R.
8
do tipo de coordenadas adoptado para a realização da análise.
Sabe-se que a potência virtual gerada pelas forças de inércia de um corpo rígido tem a
expressão:
(18)
Onde r é o vector de posição, que deve ser reescrito de forma a ter em conta o sistema de
coordenadas. Posto isto, r é reescrito então em função de q:
, (19)
onde:
(20)
em que rip’ é o vector de coordenadas locais de rip no referencial do corpo rígido.
Posto isto, e voltando ao Teorema das Potênciais Virtuais, é possível obter (21), a matriz
de massa global, limitando-se a desenvolver (20).
(21)
onde Ii é o momento polar de inércia calculado relativamente ao ponto i, x’G e y’G as
coordenadas locais do centro de massa, m é a massa e Lij o comprimento entre os pontos i e j.
É ainda de referir que esta matriz é constante e simétrica, e que esta matriz representa apenas
um corpo rígido, pelo que não é a mesma matriz referida na equação (17), que representa a
matriz de massa de todo o sistema.
2.1.4. Forças Externas
As forças externas concentradas são, em geral, aplicadas em pontos P, que não os pontos i
e j anteriormente referidos. Desta forma, torna-se necessário transformar essa força f aplicada
em P num conjunto equivalente de forças generalizadas g aplicadas sobre as coordenadas
naturais do elemento. Recorrendo novamente ao Princípio dos Trabalhos virtuais, obtém-se:
(22)

Santos, D. Paulo, J. Ornelas, M. e Pinto, R.
9
2.1.5.Forças Internas
A partir do sistema de equações (17), é possível observar que as forças internas obtidas a
partir de λ, são calculadas de acordo com o tipo de constrangimento em estudo.
Para este trabalho, destaca-se o cálculo dos constrangimentos de junta explícita através de
(23) e os momentos de constrangimentos de guiamento angular, quer do tipo produto interno
(24) quer do produto externo (25).
(23)
(24)
(25)
2.2. Aquisição de Dados
Nesta subsecção apresenta-se a metodologia de aquisição dos dados cinéticos e cinemáticos
necessários à análise de dinâmica directa e o tratamento de manipulação dos dados para posterior
utilização.
2.2.1. Recolha de dados
Como já foi referido, no laboratório de Biomecânica, foram recolhidos dados cinemáticos,
de electromiografia e de pressão.
Para tal, foram colocado 17 marcadores passivos em locais específicos ao longo de todo o
corpo – extremidade superior da cabeça, ombro esquerdo e direito, zona lateral de cada
cotovelo, pulsos, extremidades esquerda e direita da anca, zona lateral de ambos os joelhos,
calcanhares, tornozelos e metatarsos. Aquando da colocação dos reflectores, teve-se o cuidado
de os posicionar de modo a que, ao fazer o movimento da marcha, estes se mantivessem
estáticos tanto quanto possível.
Além disso, foram colocados eléctrodos sobre a pele, alinhados com a direcção das estrias
musculares e em zonas onde o músculo era mais acessível. Utilizando um aparelho de
electromiografia Delsys, com uma frequência de amostragem de 1000 Hz, foi possível estudar
a actividade dos músculos que se consideraram ter maior relevância para a marcha ou seja, o
Tibialis Anterior e o Gastrocnemius Lateralis.
As medições antropométricas (comprimentos segmentares) foram realizadas
posteriormente, utilizando como referências (pontos finais e iniciais dos segmentos) os
marcadores colados no corpo do modelo.
O movimento foi filmado com recurso a 11 câmaras de vídeo digitais Qualisys-
ProREFLEX, com uma frequência de amostragem de 100 Hz, possibilitando a aquisição da
trajectória dos marcadores passivos colocados no corpo do sujeito.
Através de plataformas de pressão AMTI, com uma amostragem de 150 Hz, foram também
adquiridas as curvas do centro de pressão e as curvas das forças de reacção no chão para cada
pé, de forma independente, indispensáveis para a posterior construção do vector de forças

Santos, D. Paulo, J. Ornelas, M. e Pinto, R.
10
global. Para tal, foi pedido ao elemento do grupo que caminhasse, da forma mais natural
possível, sobre as plataformas de força. É de referir que a marcha foi iniciada ainda fora das
plataformas, de modo a que se recolhessem dados correspondentes a um ciclo de marcha.
2.2.2. Tratamento de dados
Uma vez recolhidos os dados das trajectórias dos pontos de interesse, seguiu-se o
tratamento dos mesmos e sua manipulação de modo a poderem ser inseridos no programa de
análise dinâmica construído em Matlab®.
Antes de mais, utilizou-se um Filtro Butterworth, ferramenta em Excel fornecida pelo
professor, com as seguintes características: frequência de corte de 8 Hz 4 e frequência de
amostragem de 100Hz. A frequência de corte foi escolhida de modo a obter-se uma boa razão
sinal ruído, isto é, não tão alta que deixe passar muito ruído mas não tão baixa que elimine
parte do sinal pretendido. Assim são eliminadas as componentes de alta frequência
introduzidas aquando da digitalização dos dados, o que tornam mais fiáveis os valores das
velocidades e acelerações posteriormente calculados.
Procedemos também à eliminação de uma das coordenadas dos dados adquiridos. De facto,
no laboratório foi adquirido movimento segundo os 3 eixos, isto é, segundo o eixo dos xx
correspondente à direcção da realização do movimento, eixo dos yy correspondente à
perpendicular ao plano em que se descreveu o movimento (sagital) e o eixo dos zz
correspondente à vertical. No entanto, dado que o objectivo era uma análise 2D, eliminou-se a
componente segundo o eixo dos yy.
Tal como os dados das trajectórias dos pontos de interesse, os dados provenientes da
plataforma de pressões tiveram também que ser manipulados para posterior utilização nas
equações do movimento. Assim foi fundamental saber a que instante de tempo correspondiam
as forças que tinham sido registadas.
Para posterior cálculo das matrizes de massa utilizaram-se a massa do indivíduo e as
coordenadas dos pontos recolhidos no laboratório. Com esses dados e com os parâmetros
consultados em [6] foram calculadas as características físicas dos segmentos do corpo
humano, como comprimentos, massa, raio de giração e momentos polares de inércia, sendo
todos os dados calculados a partir da extremidade proximal do elemento. Tendo as equações
26 e 27, foi calculado o momento de inércia para cada um dos segmentos, cujos resultados são
apresentados na tabela 1.
sendo que LiG é a distância do ponto proximal (i) ao centro de massa (G). No entanto,
como os dados tabelados em termos de raio de giração são referentes ao ponto i, então o
cálculo a executar é representado pela seguinte equação:

Santos, D. Paulo, J. Ornelas, M. e Pinto, R.
11
Tabela 1 – Dados antropométricos dos segmentos corporais
Segmento Corporal Comprimento
(m) Massa (Kg)
Centro de
Massa (x/m)
Centro de
Massa (y/m)
Raio de
Giração (m)
Momento de
Inércia (Kg.m2)
Cabeça+Pescoço 0,327350735 4,9621 0,195624799 0 0,118500966 0,069680185
Braço direito 0,315402906 1,93765 0,182050557 0 0,089889828 0,015656563
Antebraço direito 0,262215338 1,1583 0,001199373 0 0,070011495 0,005677534
Braço esquerdo 0,264017989 1,93765 0,00164831 0 0,08138746 0,012834836
Antebraço esquerdo 0,285570034 1,1583 0,001306197 0 0,076247199 0,006733934
Tronco 0,488842223 31,0739 0,219294621 0 0,174516674 0,946388855
Coxa direita 0,445679999 10,1244 0,00182506 0 0,14662872 0,217674412
Perna direita 0,424074843 3,09595 0,00189095 0 0,108139085 0,03620423
Coxa esquerda 0,454554483 10,1244 0,001861401 0 0,149548425 0,226429487
Perna esquerda 0,393091854 3,09595 0,001752797 0 0,100238423 0,031107305
Calcanhar-
Metatarso direito 0,146252908 0,97955 0,064570659 0,032820831 0,027547808 0,000743363
Calcanhar-
Metatarso esquerdo 0,139552657 0,97955 0,061612498 0,032690477 0,026305119 0,000677809
3. MODELO UTILIZADO
O modelo utilizado nesta segunda parte de dinâmica, em nada difere do utilizado na
primeira parte, tal como ilustra a figura 4. As tabelas 1 e 2 apresentam as características do
sistema multicorpo e os parâmetros antropométricos respectivamente.

Santos, D. Paulo, J. Ornelas, M. e Pinto, R.
12
Tabela 2. Características do Sistema Multicorpo
Coordenadas Naturais 42 Constrangimentos de Corpo Rígido 16
Corpos Rígidos 12 Constrangimentos de Juntas
Explicitas
12
Segmentos 16 Constrangimentos de Guiamento 14
Juntas de Revolução 12 Número de Constrangimentos 42
Parte do Corpo Comprimento
Médio (cm)
Comprimento
medido (cm) Parte do Corpo Comprimento
Médio (cm)
Comprimento
medido (cm)
Cabeça+Pescoço 32.7 31 Perna direita 42,4 42,4
Braço esquerdo 28.6 30,3 Perna esquerda 39,3 42,5
Braço direito 31.5 29,6 Tornozelo – Calcanhar
direito 6,6 7,9
Antebraço esquerdo 26.4 26,7 Tornozelo – Calcanhar
esquerdo 6,5 7,9
Antebraço direito 26.2 26,8 Tornozelo – Metatarso
direito 11,2 12,3
Tronco 48.9 51 Tornozelo – Metatarso
esquerdo 10,2 13
Coxa direita 43.7 42,9 Calcanhar – Metatarso
(D) 15,3 18,5
Coxa esquerda 45.5 41,5 Calcanhar – Metatarso
esquerdo 13,9 18,2

Santos, D. Paulo, J. Ornelas, M. e Pinto, R.
13
4.IMPLEMENTAÇÃO COMPUTACIONAL
Para que o programa corra devidamente, devem estar presentes na pasta os seguintes
ficheiros:
avaliaCL.m
avaliafuncoes.m
avaliaguiamentos.m
avaliaJunta.m
avaliaPE.m
avaliaPI.m
avaliaTrajectoria.m
BM.jpg
calcula_reaccoes_momentos.m
cria_g.m
cria_gpeso.m
cria_M.m
dados_antropometricos.txt
dinamica.m
Fim.fig
Fim.m
forcas_exteriores.txt
gifplayer.m
graficos.m
graficos_momentos_reaccoes.m
GUI.fig
GUI.m
guiamentoangulos.txt
guiamentotrajectoriaanca.txt
Logo_IST.jpg
mmspder.m
modelo.jpg
plot_movimento.m
posicoes_pontos.txt
resolve_equacoes_movimento.m
splines_forcas.m
splines_guiamento.m
tabmapeamento.m
Figura 4. Representação do Modelo Biomecânico Utilizado

Santos, D. Paulo, J. Ornelas, M. e Pinto, R.
14
4.1.Interface com o utilizador
O programa dever correr-se executando o script GUI.m. Abre-se uma janela dando as boas
vindas ao utilizador. Clicando no botão “Iniciar Análise Cinemática e Dinâmica”, é
perguntado ao utilizador se pretende guardar um ficheiro de vídeo da animação. Se a resposta
for positiva deve inserir-se um nome para o ficheiro avi no qual ficará guardado o vídeo da
animação do modelo ao longo do tempo da simulação. Este ficheiro fica guardado na pasta do
programa. Abre-se outra janela com a hipótese de se visualizar os vectores das forças de
reacção no chão, durante a simulação. De seguida, abre-se uma janela com o modelo, que é
actualizado instante após instante até se chegar ao final da simulação.
O utilizador pode agora visualizar os resultados de forma gráfica, seleccionando se
pretende analisar dos dados de cinemática ou dinâmica. No caso da análise cinemática, deve
seleccionar-se um ponto do modelo, para depois se visualizarem os gráficos de posição,
velocidade e aceleração. No caso da dinâmica, apenas são analisadas as reacções e momentos
nas ancas, joelhos e tornozelos.
Quando todos os gráficos e informações de interesse tiverem sido guardados, selecciona-se
“Sair do Programa”. Todas as janelas abertas se fecham e aparece uma mensagem de
despedida.
4.2.Funcionamento interno do utilizador
Após o utilizador escolher as suas preferências de visualização, como descrito na secção
anterior, o programa define os instantes de tempo inicial e final, o passo de tempo e cria os
splines cúbicos de guiamento angular e de trajectória, recorrendo ao script
splines_guiamento.m, que por sua vez vai carregar os dados experimentais a partir dos
ficheiros guiamentoangulos.txt e guiamentotrajectoriaanca.txt. Ficam assim definidos os
splines interpoladores dos dados experimentais provenientes do laboratório da marcha, assim
como a primeira e segunda derivadas.
De seguida, é criada a tabela de mapeamento, a partir do script tabmapeamento.m, e é
definido o número de coordenadas e de constrangimentos do problema. Cria-se uma matriz
(modelo) com outros dados antropométricos do modelo multicorpo, tais como a massa e o
momento de inércia de cada segmento. De seguida, cria-se a matriz de massa global a partir
de cada matriz de massa local de cada segmento, utilizando o script cria_M.m.
Com o script cria_gpeso.m, constrói-se o vector gpeso, que contém a contribuição da força
gravítica sobre cada segmento para o vector de força global. Faz-se os splines das forças de
reação do chão nos pés e pontos de aplicação, recorrendo ao splines_forcas.m. De seguida,
calculam-se as posições e velocidades iniciais em cada ponto, recorrendo ao ficheiro
posições_pontos.txt, que contém as coordenadas de todos os pontos do modelo ao longo do
tempo. Estas condições iniciais vão ser utilizadas na primeira iteração do ODE45 (resolução
de um problema de valor inicial).
É inicializada a animação do modelo e cria-se o ficheiro avi, caso o utilizador tenha
escolhido gravar o vídeo da animação. Definem-se os parâmetros da estabilização de
Baumgarte e inicia-se um ciclo for, que vai ser repetido tantas vezes quanto os intervalos de

Santos, D. Paulo, J. Ornelas, M. e Pinto, R.
15
tempo da simulação pretendida, 101, neste caso, correspondentes ao intervalo de tempo [0,1]s,
com um passo de 0.01s.
Em primeiro lugar, a tabela de mapeamento é actualizada com os constrangimentos de
guiamento para aquele instante de tempo, são definidos os valores iniciais e é executada a
função ODE45, que utiliza a função resolve_equacoes_movimento.m para devolver as
expressões a integrar. Dentro desta última função, é calculada a matriz ϕ (a partir da tabela de
mapeamento) e a respetiva jacobiana, os vectores μ, γ e é criado o vector das forças externas
generalizadas (somando a contribuição do pesos dos segmentos do corpo às forças de reação
aplicadas nos pés). É construído o vetor γ modificado com a estabilização de Baumgarte, e
são resolvidas as equações do movimento, obtendo-se as acelerações nos diversos pontos, o
vector λ (a ser utilizado no cálculo das reacções e momentos articulares), e é devolvido o
vector com os valores de velocidade e aceleração para a função ODE45 integrar no tempo. A
partir dos resultados devolvidos pela função ODE45, guarda-se o vector das coordenadas
generalizadas, tal como o das velocidades e acelerações. De seguida, calculam-se as reacções
e momentos articulares, executando a função calcula_reaccoes_momentos.m, que calcula,
com base no vector λ, as reacções e momentos articulares na anca, joelhos e tornozelos.
Finalmente, com os dados de posição acabados de calcular, actualiza-se a representação
gráfica do modelo biomecânico. E repete-se o ciclo descrito neste parágrafo até ao instante
final.
Após a execução completa da simulação, o utilizador pode visualizar graficamente os
resultados armazenados durante a mesma. Se seleccionar a análise cinemática, é executada a
função gráficos.m, que recebe um ponto e representa os gráficos de posição, velocidade e
aceleração para esse ponto do modelo. Se for seleccionada a análise dinâmica, é executada a
função gráficos_momentos_reaccoes.m, que representa as reacções e momentos nos pontos de
maior interesse para a análise da marcha humana (anca, joelhos, tornozelos).
5.RESULTADOS E DISCUSSÃO DE RESULTADOS
5.1.Reacções
5.1.1.Apoios

Santos, D. Paulo, J. Ornelas, M. e Pinto, R.
16
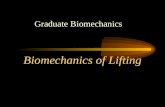
A figura 5 mostra os resultados relativos às forças de reacção nos apoios (nas placas de
forças). Analisando os resultados e comparando-os com as referências bibliográficas pode
constatar-se que são bastante similares. Conclui-se assim que existem forcas de reacção em
cada pé durante cerca de 60% da passada. A reacção horizontal apresenta uma fase positiva
durante a primeira parte da passada (devida a desaceleração de todo o corpo em x) e outra
negativa na última parte da passada (aceleração do corpo). As duas ondas características na
reacção vertical representam o aumento da aceleração do centro de massa em y e a sua
posterior diminuição. Na figura 6 são representadas as reacções (em módulo, direcção e ponto
de aplicação) no decorrer da simulação laboratorial.
Figura 5. Reacções nos apoios (resultados experimentais/teoricamente esperados)

Santos, D. Paulo, J. Ornelas, M. e Pinto, R.
17
Tal como a figura XXX mostra o movimento é iniciado pelo pé direito, pelo que os valores de
reacções articulares (tornozelos, joelhos e ancas) devem ser inicialmente positivos nessas
articulações dos membros direitos e nulas nos membros esquerdos.
Confirmando o que seria de esperar as figuras 7,8 e 9 demonstram que as reacções verticais
para o tornozelo direito, joelho direito e anca direita atingem valores iniciais elevados e mantêm-
se positivas durante o tempo em que o pé direito permanece no chão, sendo nulas depois disso.
Por sua vez as reacções verticais nas articulações dos membros esquerdos são nulas enquanto o pé
esquerdo não está no chão, aumentando depois para valores positivos dadas as reacções exercidas
aquando da passada efectuada pelo pé esquerdo.
Relativamente à análise das reacções horizontais pode verificar-se nas articulações dos
membros direitos um aumento e uma posterior diminuição nos valores das reacções dada a
aceleração do centro de massa, para a progressão horizontal do corpo e posterior desaceleração.
Figura 6. Representação das reacções no modelo biomecânico

Santos, D. Paulo, J. Ornelas, M. e Pinto, R.
18
5.1.2.Tornozelos
5.1.3.Joelhos
5.1.4.Anca
Figura 7. Reacções horizontais e verticais nos tornozelos
Figura 8. Reacções horizontais e verticais nos joelhos
Figura 9. Reacções horizontais e verticais na anca

Santos, D. Paulo, J. Ornelas, M. e Pinto, R.
19
5.2.Momentos
5.2.1.Tornozelos
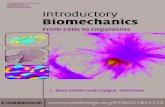
A figura 10 permite concluir que apesar do módulo dos momentos ser diferente entre os
resultados obtidos e os resultados teoricamente esperados, ambos apresentam um
comportamento muito semelhante em função da marcha.
Analisando esta figura verifica-se que o período inicial em que os momentos têm valor
negativo, corresponde ao tempo (cerca de 18% da marcha) em que o pé direito está em
dorsiflexão e portanto em que o calcanhar está apoiado no chão. Posteriormente a planta do pé
vai contactar com o chão totalmente, pelo que o pé estará em flexão plantar, apresentando o
tornozelo valores positivos de momento articular. Quando o pé se levanta do solo esse
momento será nulo e por sua vez o pé esquerdo irá neste instante iniciar todo o ciclo descrito
para o pé direito.
5.2.2.Joelhos
Figura 10. Momento articular do tornozelo direito (experimental/bibliografia)
Figura 11. Momento articular do joelho direito (experimental/bibliografia)

Santos, D. Paulo, J. Ornelas, M. e Pinto, R.
20
Uma vez mais se pode verificar, tendo em conta o comportamento do joelho ao longo da
marcha, que os resultados obtidos são semelhantes aos resultados teoricamente esperados,
embora inversamente (por se tratar de membros de membros diferentes).
A figura 11 permite-nos inferir que o joelho direito se encontra inicialmente em extensão
(pois os valores do momento articular são negativos), sendo a extensão máxima quando o
calcanhar está apoiado não chão. Posteriormente o joelho vai apresentar flexão muscular o
que provoca valores positivos para os momentos articulares, atingindo o seu máximo quando
o metatarso direito está apoiado no chão. Devido ao comportamento simétrico do corpo, tal
como anteriormente, a flexão máxima do joelho direito corresponde à extensão máxima do
joelho esquerdo, em que tempos simultaneamente apoiados no chão o metatarso direito e o
calcanhar esquerdo.
5.2.3.Anca
A figura 12 mostra claramente como os valores dos momentos na anca diminuem desde
que o calcanhar direito está assente no chão até que até à fase de balanceio da perna esquerda,
tempo este em que os momentos articulares da anca começam a tomar valores positivos.
Contrariamente ao que acontecia antes com as outras articulações, a anca apresenta este
comportamento tanto para o lado esquerdo como direito.
5.3.Electromiografia
O EMG é a melhor representação do controlo neurológico (activação) músculo-
esquelético. Cada unidade motora, quando activado, produz um potencial eléctrico que é a
característica dessa mesma unidade motora e da posição em que os eléctrodos foram
colocados. Durante qualquer movimento voluntário, como, por exemplo, a marcha, o sinal do
EMG é simplesmente uma soma algébrica de vários potenciais eléctricos de várias unidades
motoras envolvidas no movimento.
Figura 12. Momento articular da anca (experimental/bibliografia)

Santos, D. Paulo, J. Ornelas, M. e Pinto, R.
21
Na aquisição de dados no laboratório foi adquirido a EMG de dois músculos (um extensor
e outro fletor), tal como ilustram as figuras seguintes:
Figura 13. Potencial eléctrico detectado no músculo Tibialis Anterior em função do tempo
Figura 14. Potencial eléctrico detectado no músculo Gastrocnemius Lateralis em função do tempo

Santos, D. Paulo, J. Ornelas, M. e Pinto, R.
22
Com os dados obtidos a partir do EMG, é possível verificar que, tal como seria de esperar,
a extensão e flexão (desde caso, do pé) são movimentos com padrões complementares, já que
o pé efectua um movimento flector ou extensor.
Numa abordagem mais teórica, é esperado que quando há movimento de extensão do pé, a
força de reacção no pé aumente, já que este movimento corresponde à propulsão da perna
para que o pé deixe de contactar com o chão. No que diz respeito ao movimento de flexão
espera-se que corresponda sensivelmente aos momentos antes do pé tocar no chão.
O alinhamento do EMG com os restantes dados não é possível já que o EMG apresentado
tem um intervalo de tempo que está compreendido entre os 0 e 10s, o que corresponde a todo
o movimento e não há nenhuma referência temporal ao ciclo avaliado no resto dos dados.
6.CONCLUSÕES
Com este trabalho foi possível verificar que a utilização deste tipo de análise é muito útil,
dado que através dela é possível apurar de forma não invasiva as forças de reação articulares e
os momentos associados às articulações, já que não é possível medir de forma eficiente e
directa estes dados.
É desta forma possível, tal como na cinemática, obter as posições, velocidades e
acelerações. Todos os resultados obtidos, tal como foi discutido anteriormente foram
aceitáveis, apesar de termos encontrado alguns problemas no decorrer deste trabalho,
nomeadamente com as reacções que não apresentavam resultados tão satisfatórios.
A razão pela qual acredita-se que inicialmente estes resultados não eram satisfatórios
prende-se com alguns factores, desde um possível erro no código, uma má estruturação do
modelo biomecânico, ou até mesmo uma filtragem ineficiente dos dados. Esta é de resto, a
justificação que também encontrámos para um eventual desvio dos resultados obtidos.
Desta forma, e para que os resultados obtidos fossem os melhores possíveis, procedeu-se a
um estudo árduo destes possíveis problemas, com maior ênfase nos problemas inerentes ao
MATLAB, tendo estes sido encontrados e resolvidos com sucesso, levando aos resultados
finais apresentados.
Conclui-se desta forma que todos os objectivos desta análise foram atingidos, dado que o
modelo biomecânico bidimensional foi implementado com sucesso, bem como os resultados
inerentes a esta implementação, que consideramos ser satisfatórios.
É ainda de referir que a partir deste tipo de estudo, é possível detectar e tratar algumas
patologias relacionadas com a marcha, já que permite uma identificar de forma clara o tipo de
problema, o que leva a que seja possível desenvolver estratégias eficientes para o seu
tratamento.
REFERÊNCIAS
[1] M. Silva, Apontamentos da Disciplina de Biomecânica do Movimento, DEM, IST, 2011.
[2] M. Silva e J. Ambrósio, “Solution of the Redundant Muscle Forces in Human
Locomotion with Multibody Dynamics and Optimization Tools”, Int. Journal of
Mechanics Based Design of Structures and Machines, Vol 31 (3), 381-411, 2003

Santos, D. Paulo, J. Ornelas, M. e Pinto, R.
23
[3] Ortega, D; Farley, T; "Minimizing Center of mass during walking increases metabolic
cost in walking", Journal of Applied Physiology, 99, 2099-2107, 2005
[4] Nigg, B. M. & Herzog, W. (1995). Biomechanics of the musculo-skeletal system. New
York: John Wiley & Sons, Inc.
[5] Winter David, “The Biomechanics and Motor Control of Human Gait: Normal, Elderly
and Pathological”, University of Waterloo press, Second Edition.
[6] Leva, P. (1996). "Adjustments to Zatsiorsky-Seluyanov's segment inertia parameters."
Journal of biomechanics 29(9): 1223-1230.