Autonomous Ground Vehicles The Darpa Grand Challenge
17
Autonomous Ground Vehicles: the DARPA Grand Challenge MAE593 Class Presentation Xiaobo Zhou Tomasz Lewczyk
Transcript of Autonomous Ground Vehicles The Darpa Grand Challenge

Autonomous Ground Vehicles:
the DARPA Grand Challenge
MAE593 Class PresentationXiaobo Zhou Tomasz Lewczyk

Outline
• General overview of the competition• The challenges• The solutions
– Take a look into the winner
• The future…

Overview of DARPA Grand Challenge
• A prize competition for driverless cars, sponsored by the Defense Advanced Research Projects Agency (DARPA)
• Create the first fully autonomous ground vehicles capable of completing a substantial off-road course within a limited time

What the challenges are:
• Rough terrain• Sensor fusion• Localization• Mapping• Obstacle avoidance• Path planning• Vehicle control• …

They made it•All but one of the 23 finalists in the 2005 race surpassed the 11.78 km (7.36 mile) distance completed by the best vehicle in the 2004 race.•Vehicles in the 2005 race passed through three narrow tunnels, included more than 100 sharp turns. The race concluded through Beer Bottle Pass, a winding mountain pass with sheer drop-offs on both sides.

2005 Champion Stanley details
• A a shock-mounted rack carries an array of six Pentium M computers, a Gigabit Ethernet switch, and other various devices like custom-made power system with backup batteries , and a switch box
• Volkswagen Touareg R5 • four wheel drive• variable height air
suspension, • automatic, electronic
locking differentials
• 5 SICK laser range finders• two 24 GHz radar sensors • GPS and radio antennas
•A DC motor provides electronic steering control •A linear actuator shifts the gears•Vehicle data communicated to the computer system through a CAN bus interface.
Resources From Stanford Racing Team
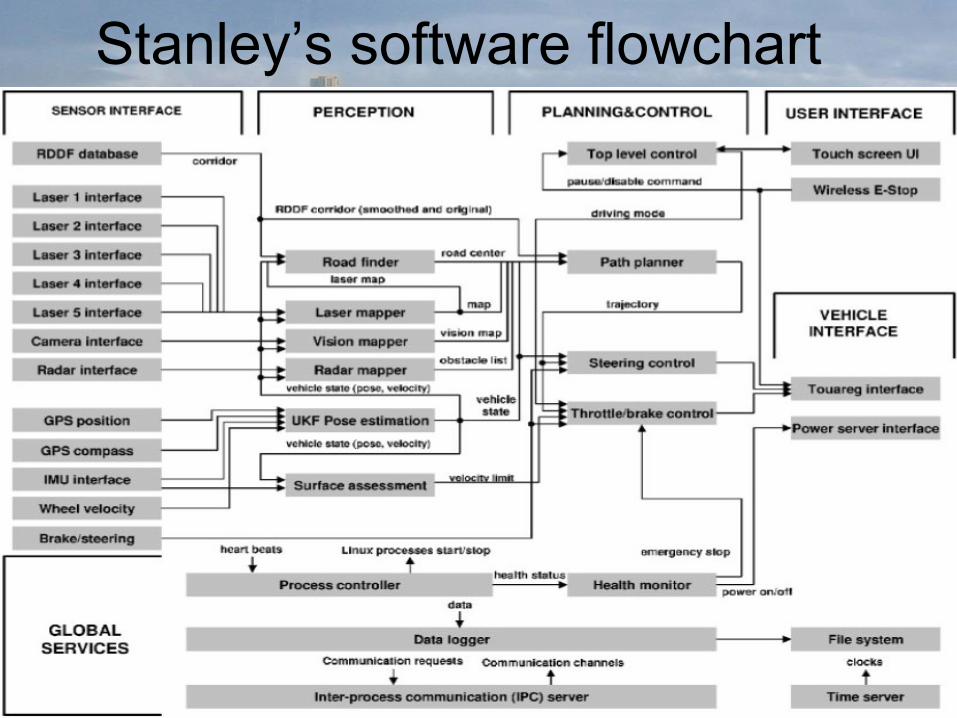
Stanley’s software flowchart
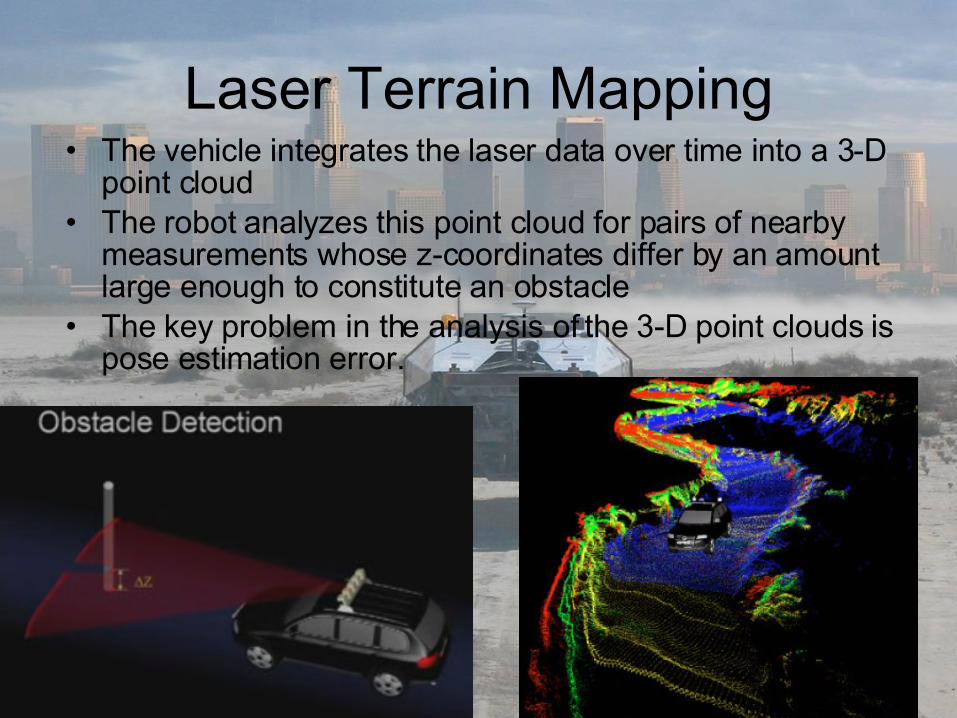
Laser Terrain Mapping• The vehicle integrates the laser data over time into a 3-D
point cloud• The robot analyzes this point cloud for pairs of nearby
measurements whose z-coordinates differ by an amount large enough to constitute an obstacle
• The key problem in the analysis of the 3-D point clouds is pose estimation error.

A single line scanner, 3-D point cloud, Small errors in pose estimation and Terrain labeling for parameter tuning

Cont.• The solution to this problem is found in probabilistic
analysis. The robot uses a Markov model to model the development of UKF noise over time.
• The state of this Markov chain is the noise in the vehicle state estimates x, y, and z, and the three Euler angles.
• The Markov chain makes it possible to evaluate pairs of witnesses probabilistically.
• Probabilistic analysis of the data has the potential to reduce the number of false positives, it comes with its own problems.
• I.e. the Markov chain is characterized by a number of parameters which are the result of complex interactions of sensors, weather, and proprietary software of the sensor manufacturers.
• To solve this problem, we employed a discriminative machine learning algorithm.

Other challenges• Dynamic State Estimation - the vehicle
state is comprised of two groups of variables: parameters characterizing the dynamic state of the vehicle and parameters pertaining to the health of the vehicle.
• Vision Mapping - employed to overcome the limited range of laser perception.
• Path Planning and Steering Control - which determines the desired path of the vehicle, and is continuously communicated to a steering controller, which is responsible for the motor commands to the steering column.
• Velocity Control - Intelligent velocity control is essential to avoid fishtailing and to protect the vehicle from the effects of ruts and uneven terrain.

Adaptive Vision
This figure illustrates the processing stages of the computer vision system: (a) a raw image; (b) the processed image with the laser quadrilateral and a pixel classification; (c) the pixel classification before thresholding; and (d) horizon detection for sky removal.

Adaptive Vision
These images illustrate the rapid adaptation of Stanley’s computer vision routines. When the laser predominately screens the paved surface, the grass is not classified as drivable. As Stanley moves into the grass area, the classification changes.

Path planning• With RDDF, just local obstacle avoidance• But, limited waypoints• Smooth the path and curve
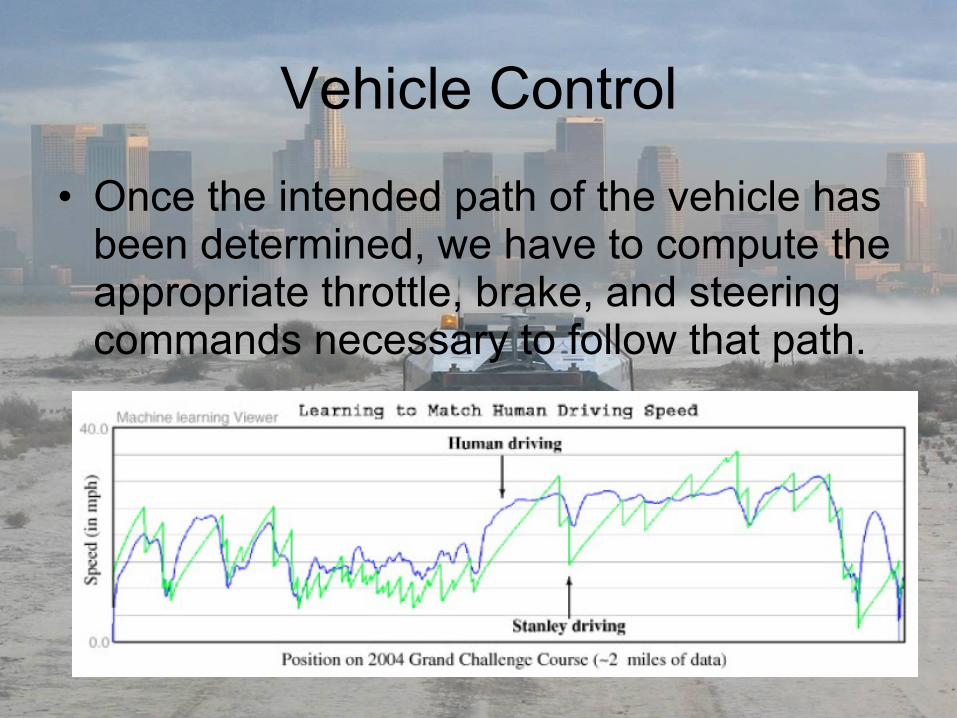
Vehicle Control
• Once the intended path of the vehicle has been determined, we have to compute the appropriate throttle, brake, and steering commands necessary to follow that path.

The Future…
• 2007
• Problems still exist
• Sudden Situations…human
• Civilian usage– Safer faster traffic…
References
• http://en.wikipedia.org/wiki/DARPA_Grand_Challenge • http://www.youtube.com/• http://www.darpa.mil/GRANDCHALLENGE/• http://cs.stanford.edu/group/roadrunner/• http://www.redteamracing.org/• Stanford Racing Team’s Entry In The 2005 DARPA Grand Challenge• M. Montemerlo, S. Thrun, H. Dahlkamp, D. Stavens, and S. Strohband,
"Winning the DARPA Grand Challenge with an AI Robot", in Proc. AAAI, 2006.
• Thrun, S., M. Montemerlo, et al. (2006). "Stanley: The robot that won the DARPA Grand Challenge: Research Articles." J. Robot. Syst. 23(9): 661-692.





![Autonomous Driving in Dynamic Environmentsstachnis/pdf/kolski06irosws.pdf · the driver [2]. In 2005, 23 autonomous vehicles started a race across the Nevada desert in the DARPA Grand](https://static.fdocuments.net/doc/165x107/5f08df737e708231d424228d/autonomous-driving-in-dynamic-stachnispdfkolski06iroswspdf-the-driver-2.jpg)