
AUTOMATIC RECTIFICATION OF LANDSAT IMAGES USING …
85
AUTOMATIC RECTIFICATION OF LANDSAT IMAGES USING FEATURES DERIVED FROM DIGITAL TERRAIN MODELS by JAMES J . LITTLE A.B. HARVARD UNIVERSITY 1972 A THESIS SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF SCIENCE in THE FACULTY OF GRADUATE STUDIES (Department of Computer Science) We accept this thesis as conforming to the required standard. THE UNIVERSITY OF BRITISH COLUMBIA July, 1980 (c) James J . Little, 1980
Transcript of AUTOMATIC RECTIFICATION OF LANDSAT IMAGES USING …

AUTOMATIC RECTIFICATION OF LANDSAT IMAGES USING FEATURES DERIVED FROM DIGITAL TERRAIN MODELS
by
JAMES J . LITTLE
A.B. HARVARD UNIVERSITY 1972
A THESIS SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF
MASTER OF SCIENCE
i n
THE FACULTY OF GRADUATE STUDIES
(Department of Computer Science)
We accept t h i s thesis as conforming to the required standard.
THE UNIVERSITY OF BRITISH COLUMBIA
July , 1980
(c) James J . L i t t l e , 1980

I n p r e s e n t i n g t h i s t h e s i s i n p a r t i a l f u l f i l m e n t o f t h e r e q u i r e m e n t s f o r
a n a d v a n c e d d e g r e e a t t h e U n i v e r s i t y o f B r i t i s h C o l u m b i a , I a g r e e t h a t
t h e L i b r a r y s h a l l make i t f r e e l y a v a i l a b l e f o r r e f e r e n c e a n d s t u d y .
I f u r t h e r a g r e e t h a t p e r m i s s i o n f o r e x t e n s i v e c o p y i n g o f t h i s t h e s i s
f o r s c h o l a r l y p u r p o s e s may be g r a n t e d by t h e Head o f my D e p a r t m e n t o r
by h i s r e p r e s e n t a t i v e s . I t i s u n d e r s t o o d t h a t c o p y i n g o r p u b l i c a t i o n
o f t h i s t h e s i s f o r f i n a n c i a l g a i n s h a l l n o t be a l l o w e d w i t h o u t my
w r i t t e n p e r m i s s i o n .
D e p a r t m e n t o f .
The U n i v e r s i t y o f B r i t i s h C o l u m b i a 2075 W e s b r o o k P l a c e V a n c o u v e r , C a n a d a V6T 1W5
D E - 6 B P 7 5 - 5 1 1 E

i i <
/ABSTRACT
Before two images of the same object can be compared, they must be brought into correspondence with some reference datum. This process i s termed r e g i s t r a t i o n . The reference can be one of the images, a synthetic image, a map or other symbolic representation of the area imaged. A novel method i s presented for automatically determining the transformation to ali g n a Landsat image to a d i g i t a l t e r r a i n model, a structure which represents the topography of an area. Parameters of an affi n e transformation are computed from the correspondence between features of t e r r a i n derived from the d i g i t a l t e r r a i n model, and brightness d i s c o n t i n u i t i e s extracted from the Landsat image.

i i i
Table of Contents
1. Introduction 1 2. Previous Work 9
2.1 Registration and Rectification 9 2.2 Digital Terrain Models 12 2.3 Synthetic Images 14 2.3.1 Reflectance Functions 14 2.3.2 Sun Position 18 2.4 Feature Selection 18 2.5 Matching 20 2.5.1 Symbolic Matching 21 2.5.2 Geometrically Constrained Matching 23
3. The Registration Method 28 3.1 The F i r s t Stage: Feature Extraction 28 3.1.1 Extracting Features from Digital Terrain Models 28 3.1.2 Extracting Features from the Landsat Image 29 3.1.3 Selecting Feature Points 31 3.1.4 Line Growing 35 3.1.5 Approximations to Lines 36 3.2 The Second Stage: Matching 44 3.3 The Affine Transformation 46 3.4 Construction of a Pairing 49 3. 5 Support for a Pairing 53 3.6 Consistency of the Transform 56 3.7 Verification 56
4. Implementation and Testing 59 4.1 The Input 59 4.2 Programming Languages 60 4.3 Data Structures 60 4.4 Estimating the Affine Transform 62 4.5 Examples of Registration and Results 63
5. Discussion and Conclusions 74 5.1 Discussion 74 5.2 Further Work 76 5.3 Conclusions 76
Bibliography 77

L i s t of Figures
Figure 1 Subsection of a Land sat image 3 Figure 2 Contour p l o t (100 meter interval) of the d i g i t a l t e r r a i n model .. 4 Figure 3 Landsat features 5 Figure 4 DTM features 6 Figure 5 Registered Landsat image 8 Figure 6 Triangulated Irregular Network 13 Figure 7 The geometry of l i g h t r e f l e c t i o n 16 Figure 8 Synthetic image 17 Figure 9 Sun position i n terms of azimuth and elevation 19 Figure 10 Self-shadowed facets 30 Figure 11 Subsection of a Landsat image 32 Figure 12 Output of the edge detection step 33 Figure 13 Edge detector output after echo suppression 34 Figure 14 Lines before merging 37 Figure 15 Compatibility of segment directions i n l i n e merging 38 Figure 16 Lines after merging 39 Figure 17 Line generalization 40 Figure 18 Varying the d e t a i l l e v e l i n generalization 42 Figure 19 The band of a curve 43 Figure 20 Landsat features 45 Figure 21 Structured and simple ridges 47 Figure 22 Close f i t i n a p a i r i n g 51 Figure 23 Loose f i t i n a pairing 52 Figure 24 Mismatches and support 54 Figure 25 Self-consistency of a transform 57 Figure 26 Synthetic image for September 14 1976 64 Figure 27 DTM features with matched points 65 Figure 28 Landsat features with matched points 67 Figure 29 Subsection of Landsat image 68 Figure 30 Synthetic image for January 8 1979 70 Figure 31 DTM features with matched points 71 Figure 32 Landsat features with matched points 72 Figure 33 Registered Landsat image for January 8 1979 73

V
Acknowledgement
I sincerely thank my supervisor Robert J . Woodham for his help. His perceptive c r i t i c i s m of my work i n progress has not only improved t h i s thesis but also has been very b e n e f i c i a l to my education. I also wish to thank Alan K. Mackworth for encouraging me o r i g i n a l l y bo pursue t h i s thesis topic.

1
1. Introduction
There are many image analysis tasks where the objects i n the scene are
known beforehand. Often i n d u s t r i a l inspection and manipulation tasks
involve determining the position and orientation of a known part within a
given image (Hsieh and Fu,1979; Agin,1980; Myers, 1980). S i m i l a r l y ,
biomedical applications, such as chest X-ray interpretation (Ballard et a l . ,
1979), often deal with images whose general content i s known. The
interpretation of images acquired v i a s a t e l l i t e or a e r i a l photography i s
f a c i l i t a t e d by knowledge of the scene given i n form of maps and other
geographic data. Once the position and orientation of objects i n a scene i s
determined, image analysis s i m p l i f i e s . Thus, registering the image to the
scene model i s an important f i r s t step i n automatic image interpretation.
In remote sensing, the s p a t i a l relations between the objects i n the scene
are precisely known, and the geometric r e l a t i o n between image and scene
model can be characterized by a fixed mathematical transformation of known
form but unknown parameters. In contrast, the number of r i b s i n a chest
x-ray, for example, i s given, as we l l as t h e i r general s p a t i a l
relationships, but the i r precise size and position are not precisely known.
The importance of re g i s t r a t i o n has been demonstrated i n the domain of
Landsat images. When a new image has been brought into correspondence with
surface data, the interpretation of ground cover i s improved. For example,
the e f f e c t of shading due bo variations i n surface topography and shadows
can be estimated (Woodham, 1980). Thus f a r , r e g i s t r a t i o n has eluded
complete automation. The object of t h i s thesis i s to present a method for
automated r e g i s t r a t i o n of Landsat images.
A Landsat MSS image measures scene radiance i n each of four spectral

2
bands, at a nominal ground resolution of 79 x 79 meters. The position and
attitude of the Landsat MSS platform i s known with li m i t e d precision. After
systematic corrections based on the estimated platform position and
attitude, the ground location of an image point may d i f f e r from i t s true
position by as much as 10 kilometers. Since each picture element (pixel) of
a Landsat MSS image has a nominal ground spacing of 56 meters i n the across
track d i r e c t i o n and 79 meters i n the along track d i r e c t i o n , t h i s represents
an error of up to 179 p i x e l s . Further processing i s thus required to relate
the image coordinate system to other coordinate systems.
A d i g i t a l t e r r a i n model (DTM) represents surface elevation as a
function of ground coordinates. A DTM can be accurately located i n a
geographic coordinate system. A Landsat image registered to a d i g i t a l
t e r r a i n model can be d i r e c t l y compared with other sources of geographic
information, and other images.
An automatic method for registering Landsat images to d i g i t a l t e r r a i n
models i s developed. As an example, figure 1 shows a 100 x 100 section of a
Landsat image. Figure 2 shows a contour p l o t at 100 meter int e r v a l s of the
d i g i t a l t e r r a i n model. In the method presented here, a set of c u r v i l i n e a r
features i s determined from both the Landsat image and the DTM. Features
from the Landsat image are shown i n figure 3 while those selected from the
DTM are depicted i n figure 4 . A correspondence between the elements of the
two sets of c u r v i l i n e a r features i s established which s a t i s f i e s both
geometric (shape) constraints and topological (adjacency) constraints. The
matching between elements determines point pairs input to a least-squares
estimator for the parameters of an affine transform. The image re g i s t r a t i o n
problem i s transformed into the problem of matching sets of curves i n the
plane. The points on the features used for calculating the transform are

Figure 1 100 x 100 pixe l subsection of Landsat image (band 7) from September 14,1976, frame ID 11514-17153. Photographed from screen of COMTAL Vision 1.

4

5

6
Figure 4 Features derived from DTM using the sun's position at the time of image acquisition on September 14, 1976.

7
labelled 1-6 i n figures 3 and 4. The registered Landsat image i s shown i n
figure 5 . The derived a f f i n e transform i s :
x' = a x + b y + c y 1 = d x + e y + f
where (x,y) are Landsat image coordinates, (x',y') are DIM coordinates, and
where
a = 0.555292 b = 0.131612 c = 1.944259 d = -0.143495 e = 0.7736 12 f = 2.197464
Chapter 2 reviews previous work i n r e g i s t r a t i o n , feature detection,
d i g i t a l t e r r a i n models and matching methods.
Chapter 3 develops the method for registering images to d i g i t a l t e r r a i n
models. Knowledge of sun position i s used to select features for
re g i s t r a t i o n . Geometric constraints are used to guide the re g i s t r a t i o n
process.
Chapter 4 presents the pa r t i c u l a r implementation used to r e a l i z e the
method.
Chapter 5 discusses the results and t h e i r relevance to other image
understanding tasks.

8
Figure 5 Registered Landsat image for September 14, 1976. The white square o u t l i n e s the 10 kilometer area covered by the DTM. Photographed from the screen of the COMTAL Vi s i o n 1.

9
2. Previous Work
2.1 Registration and R e c t i f i c a t i o n
Image reg i s t r a t i o n i s the process of determining the correspondence
between elements of two or more images and applying a transformation to one
image to a l i g n i t with the other. Two s a t e l l i t e images would f i r s t be
registered i n order bo proceed with change detection. However, i t i s often
necessary to register images not just to each other but also to absolute
ground coordinates. Registering an image to absolute ground coordinates i s
ca l l e d image r e c t i f i c a t i o n . Often the term re g i s t r a t i o n i s used for both
image-to-image r e g i s t r a t i o n and image-bo-ground r e g i s t r a t i o n ( i . e . ,
r e c t i f i c a t i o n ) .
Commonly, two images are registered by manually selecting ground
control points (GCP's) from each image (Bernstein, 1976). A ground control
point i s a d i s t i n c t i v e ground feature detectable i n an image. Typical GCP's
are a i r p o r t s , land-water boundaries, f i e l d patterns and highway
intersections. Parameters of an appropriate transformation are calculated
from a subset of the selected GCP's. For each GCP i n one of the images, the
corresponding GCP must be located i n the second. Manual selection of GCP's
i s time-consuming. Several techniques have been developed to automate
p a r t i a l l y the selection of ground control points.
As an i n i t i a l improvement to the manual method, correla t i o n techniques
can be used to improve the estimates of the GCP locations. For each GCP i n
the reference image, a small m x n subsection of image surrounding the GCP
i s used as a template. The best matched position of the template determines

10
the location of the corresponding GCP. The best position is that at which
the correlation of the template with the image is maximized. The
correlation between an m x n template SI and a subsection of an image S2 at
(x,y) is:
YL Z_Sl(i,j) • S2(x+i,yfj)
High output of this operation may result i f one of the subsections has a
high average gray level. For this and other reasons, i t is convenient to
normalize the correlation, resulting in the following formulation: Vw. y\
/ / (Sl(i,j) - Si) • (S2(x+i,y+j) - S2)
<r~~ 2 I— (Sl(i,j) - Si) 7 / (S2(x+i,y+j) - S2)
where r-*'*-
sT=l/(m-n)£ L Sl(i,j) and
S2 = l/(m.n)^_ y 1 "s2(x+i,y+j)
Then a perfect correlation corresponds to a value of 1. Sequential
similarity detection algorithms (SSDA's) can be used to speed up template
matching (Barnea and Silverman,1972). This correlation process is repeated
for each GCP. The refined GCP locations are used to determine the
parameters of the registration transformation. This refinement technique
can be embodied in a fully automatic registration procedure i f a library of
GCP templates is maintained for use in the registration of subsequent images
of the same area.
The GCP method can be further automated by introducing automatic
selection of the GCP's. As a first step toward this, the reference image
can be regularly subdivided into overlapping subimages, each of which is

11
used as a template i n the correlation technique. This automatic method has
d i f f i c u l t i e s . There i s no guarantee, for example, that the GCP templates
can be located by correlation i n other images. The GCP's produced by-
regular subdivision are random with respect to the content of the image.
Davis and Kenue(1977) describe a method for automatically selecting ground
control points i n a reference image. Ground control points are selected
where there i s a strong connected set of brightness d i s c o n t i n u i t i e s . The
algorithm thresholds the gradient of the image and finds connected sets of
pix e l s i n the thresholded gradient image. GCP's are selected from the
resulting set so as to be as evenly scattered about the image as possible.
This method improves upon regular subdivision of the reference image into
templates, but i t also suffers two major shortcomings:
1) Since the GCP's are chosen on the basis of image features, the GCP's have no necessary r e l a t i o n bo ground features whose appearance can be expected bo remain constant i n other images. 2) In p a r t i c u l a r , no attempt i s made to take account of possible changes i n illumination between the images, which w i l l systematically a f f e c t the appearance of the templates.
In the absence of a scene model, not much more can be done. However,
d i g i t a l t e r r a i n models, when available, can be used to select and v e r i f y
GCP's for r e g i s t r a t i o n .
Horn and Bachman (1978) use synthetic images generated from d i g i t a l
t e r r a i n models to register Landsat images. The synthetic image represents
the appearance of the t e r r a i n under the illumination conditions
corresponding to the sun position at the time of image acquisition. Their
published work assumes that the transformation between the synthetic image
and the Landsat image can be described i n terms of rotation, translation and
scale change. A correlation of the r e a l and synthetic images i s used as
measure of goodness of f i t to guide the adjustment of rotation, translation
and scaling. The correlation of the entire image i s ultimately used. This

12
i s computationally expensive. The authors avoid some of t h i s expense by
f i r s t using low resolution images to produce rough estimates of the
transformation parameters. The f u l l resolution of the data i s used to
compute the f i n a l refinements to the transformation parameters.
The method presented i n t h i s thesis follows the s p i r i t of the work of
Horn and Bachman. The known position of the sun i s used to predict the
t e r r a i n features which w i l l appear as d i s t i n c t image features. The symbolic
features themselves are used to determine the transformation parameters.
2.2 D i g i t a l Terrain Models
A d i g i t a l t e r r a i n model (DTM) represents the surface of the earth i n a
p a r t i c u l a r region. This i s usually taken to mean that the DTM can be used
to determine the elevation of the surface at any point i n the region.
Besides providing height information, a d i g i t a l t e r r a i n model also
represents the surface orientation since slope and aspect can be derived.
Slope information i s c r u c i a l for accurate calculation of the synthetic
image. Because the DTM i s defined i n a ground coordinate system, an image
registered to a DTM can be d i r e c t l y compared to other sources of geographic
information.
A common representation of t e r r a i n i s as a discrete g r i d of t e r r a i n
elevations. Slope i s determined i n a g r i d representation by l o c a l
differencing. A l t e r n a t i v e l y , t e r r a i n can be modelled as a set of contiguous
non-overlapping triangular facets (figure 6), i n a Triangulated Irregular
Network (TIN) (Peucker et a l . , 1978). In the TIN, slope information i s
d i r e c t l y computed from the surface facets. E f f i c i e n t procedures e x i s t for
converting the g r i d to a TIN and vice-versa (Peucker et a l . , 1978; Fowler

Figure 6 A Triangulated Irregular Network (TIN)

14
and L i t t l e , 1979). The d i g i t a l t e r r a i n model used for the work described
herein was constructed i n the TIN format.
The structure of t e r r a i n can be modelled by the network of ridges and
channels (divides and streams). The ridges are convex l i n e a r surface
features which, t h e o r e t i c a l l y , connect passes (saddle points) bo peaks
(relative maxima). In practice the set of ridges on a surface also includes
convex line a r features which connect to the main ridges that do j o i n passes
to peaks. Channels are concave line a r features connecting passes to p i t s
(relative minima). In addition, the surface behavior of the t e r r a i n between
ridges and channels i s modelled. This surface behavior includes l i n e s along
which the surface changes slope. These are termed breaks of slope. Actual
production of a DTM, whether a g r i d or a TIN, often involves recording the
t e r r a i n structure of ridges and channels.
Several methods e x i s t for deriving the the location of ridges and
channels from the g r i d representation (Peucker and Douglas, 1975; Toriwaki
and Fukumaru,1978). The TIN model i s advantageous for feature selection
since ridges, channels and breaks of slope are e x p l i c i t l y represented as the
boundaries of triangular facets.
2.3 Synthetic Images
2.3.1 Reflectance Functions
Image irradiance at a given point depends on the object material imaged
at that point and i t s orientation i n space with respect to the l i g h t
source (s) and viewer. Following Horn and Bachman, one model of image

15
formation uses a surface reflectance function:
PHI(I,E,G) = P * CDS(I)
where I, E, and G are the incident angle(I), emittance angle(E), and the
phase angle (G) (figure 7). In the above equation, P i s an albedo factor
depending on the surface composition, which, without additional a p r i o r i
knowledge, i s assumed to be constant. This reflectance function models a
lambertian surface which, as a perfect d i f f u s e r , appears equally bright from
a l l viewing directions. The incident angle(I) i s the angle between the
surface normal and the illumination d i r e c t i o n . In the case of Landsat
imagery, the p r i n c i p a l l i g h t source i s the distant sun, so that the
illumination d i r e c t i o n i s e f f e c t i v e l y constant for a l l surface points.
Diffuse illumination from the atmosphere and possibly from other scene
elements i s ignored i n the synthetic image.
The DTM provides accurate estimates of the surface orientation for the
test area. A synthetic image i s produced under the assumption of an
orthographic projection and a single l i g h t source at the known sun position.
The brightness i n the synthetic image at each picture element (pixel) i s a
function of the surface orientation at the appropriate point i n the DTM.
Figure 8 shows a synthetic image produced from a d i g i t a l t e r r a i n model,
using the simple reflectance function described above, with the sun from the
northwest at 45 degrees elevation, as i n standard cartographic convention.

16
Figure 7 The geometry of l i g h t r e f l e c t i o n from a surface element i s governed' by the incident angle, I, the emittance angle, E, and the phase angle, G. (after Horn and Bachman, 1978)

17
Figure 8 Synthetic image of the DTM. The ligh t source i s positioned in the northwest at 4 5 degree elevation, as in cartographic convention. Photographed from the screen of the OOMTAL Vision !.

18
2.3.2 Sun Position
In order to produce a synthetic image corresponding to an actual
imaging s i t u a t i o n , i t i s necessary to determine the sun's pos i t i o n at the
precise time of image acquisition. Fortunately, the time of acquisition of
each Landsat scan l i n e i s accurately determined and recorded as part of the
image annotation data. Standard tables or formulae can be employed to
determine the position of the sun at a given date, time, l a t i t u d e and
longitude. Sun position i s described i n terms of azimuth, the angle of
rotation about the v e r t i c a l axis, i n degrees clockwise from north, and
elevation, the angle of rotation above the horizontal (figure 9) . In t h i s
description, standard cartographic convention situates the l i g h t source at
azimuth 315 degrees, elevation 45 degrees.
2.4 Feature Selection
The l i t e r a t u r e i n image analysis abounds with techniques for
determining the po s i t i o n and orientation of brightness d i s c o n t i n u i t i e s i n
images (Davis, 1975). /An operator which performs t h i s task i s c a l l e d an
"edge detector". Generally, edge detectors perform w e l l i n locating sharp
boundaries where the r e l a t i v e brightness difference i s large and the
boundary i s l o c a l l y l i n e a r . For the purpose of the method presented i n t h i s
thesis, the features to be found i n Landsat images are r e s t r i c t e d to
d i s c o n t i n u i t i e s between r e l a t i v e l y bright and dark regions. The i n t e n s i t y
differences between regions are known to be large and the tra n s i t i o n s
between the regions sharp. The focus of the research i s not on the design

19
Figure 9 Definition of the position of the sun in terras of azimuth 0 , and elevation (j> .

20
of an optimal f i l t e r for detecting such features. Rather i t i s assumed that
most edge-detecting operators w i l l be robust enough to detect the required
boundaries.
S i m i l a r l y , the choice of method for joining p i x e l s which display edge
a c t i v i t y into l i n e s i s not c r i t i c a l . Portions of the image features sought
w i l l be r e l a t i v e l y straight, and connecting these into curves i s
straightforward, toy rule for connection which prefers extending e x i s t i n g
l i n e s along the general l i n e tendency i s acceptable. I t i s presumed when
the features are used that there w i l l be gaps i n the curves, so the degree
to which a line-growing method i s able bo bridge these gaps i s not c r i t i c a l .
In sum, feature selection techniques were chosen from e x i s t i n g methods i n
the l i t e r a t u r e .
Feature selection i n the domain of the d i g i t a l t e r r a i n model derives
from an investigation of the production of synthetic images (discussed i n
section 2.3). The method for DTM feature selection w i l l be elaborated i n
section 3.1.1.
2.5 Matching
In the automatic r e g i s t r a t i o n method presented i n the thesis, a
one-to-one correspondence i s derived between symbolic features of an image
and a d i g i t a l t e r r a i n model. This correspondence between features can be
modelled as a matching of the features, depending upon the s i m i l a r i t y of
their descriptions. I f the matching between features based on thei r
symbolic descriptions i s r e l i a b l e , then matching methods can be used for
automatic r e g i s t r a t i o n . Other researchers have considered the problem of
matching an image to a model of the scene. Research on matching
21
descriptions of an image to models of the scene can be divided into those
which handle symbolic descriptions only, and those which also manipulate
geometric relat i o n s . The topics of interest i n t h i s work are both
representations of object and image relations and the control structures
used i n matching.
2.5.1 Symbolic Matching
Barrow and Popplestone (1971) describe the adjacency r e l a t i o n of
picture regions by a region adjacency graph (RAG). This graph i s
necessarily planar. A description of a model scene i s also represented i n
terms of a RAG. Recognition of elements i n the picture i s performed by
matching a region with a model oomponent. Both region adjacency graphs are
augmented by edges indicating relations between regions such as r e l a t i v e
s i z e , position (above-below, l e f t - r i g h t ) , shape and convexity. The match i s
incrementally increased, one region at a time. The search space can be
represented as a tree; nodes represent matchings and descendants of a node
represent developments of the matching at the node by adding another region.
The search space i s probed for a solution using b e s t - f i r s t search.
Barrow and B u r s t a l l (1976) use maximal matching of graphs for matching
r e l a t i o n a l structures, such as image and scene descriptions represented as
graphs. A graph i s defined as a set N of nodes, and a r e l a t i o n R, a subset
of NxN. A matching from GI to G2 i s a subset S of NlxN2 which preserves the
relations i n each graph; for a l l pairs (a,A) and (b,B) i n S, a i s connected
to b i n GI i f and only i f A i s connected to B i n G2. A matching i s maximal
when no other matching has higher c a r d i n a l i t y . Under t h i s d e f i n i t i o n , a
node i n GI may be matched to more than one node i n G2 and vice versa. Two

22
pairs are 'compatible' i f the pairs are in S. A graph is derived, as
follows: the elements of the graph (the set X) are elements of S and the
relation (H) between elements of the graph i s that of compatibility between
pairs. Given a graph so constructed, a maximal matching of the original
graphs can be obtained by finding a maximal clique(complete subgraph) of
(X,H). It is clear that in such a clique a l l pairs are compatible, by
definition, and that i t s order is maximal. If the restriction that a = b
i f f A = B i s added to the definition of compatibility, the correspondence
generated by the maximal matching i s one-to-one. To our dismay, however,
this merely reduces a d i f f i c u l t problem to an NP-complete problem. However,
the best clique-finding algorithms seem to perform e f f i c i e n t l y in most
cases.
Tanimoto (1976) offers an excellent discussion of the motivation for
using graph matching and develops an algorithm for enumerating a l l maximal
matchings of two graphs. A matching assigns labels to regions in the
segmentation of an image. The labels form one set of nodes in a bipartite
graph, and the regions the other set. Edges represent the compatibility of
descriptions of a region with a label and hence restricted to a yes-no
decision. A maximal matching of the bipartite graph so formed i s the
maximal set of edges from one set of nodes to the other, where a node occurs
at most in one edge. Tanimoto notes that methods for constructing such
bipartite graphs are 'neither usually obvious nor necessarily possible'.
One approach i s to allow edges which satisfy many constraints such as degree
restrictions. Usually these are determined by local constraints, that i s ,
those which only require examining the neighbors of a node. A maximal
matching can be generated in 0{e * sqrt(n)) time, where e is the number of
edges in the graph, and n the number of nodes. An algorithm i s presented by

23
Tanimoto which can l i s t the set of maximal matchings of the graph. A note
of caution: the number of maximal matchings i s p o t e n t i a l l y exponential i n n.
A recent paper by I t a i , Rodeh and Tanimoto (1978) also characterizes the
cases when matching problems with r e s t r i c t i o n s are NP-complete (Aho et
al.,1974), and provides a discussion of the a p p l i c a b i l i t y of graph-matching
v i s - a - v i s constraint propagation.
Maximal matching techniques are appealing because once the
compatibility r e l a t i o n i s constructed, generation of matchings i s e f f i c i e n t .
However, the effectiveness of maximal matching methods depends upon the
extent to which the compatibility r e l a t i o n can constrain matchings to
appropriate ones. I f the compatibility r e l a t i o n i s too general, many
matchings w i l l be generated which are incorrect. Computing compatibility
becomes expensive when the i n t e r r e l a t i o n of features extends more than just
to l o c a l features. In the re g i s t r a t i o n problem, i n p a r t i c u l a r , the solution
must s a t i s f y global constraints, while compatibility testing must be rather
l o c a l to allow maximal matching to be a successful alternative method. In
addition, i t i s not clear that the relations among features can e a s i l y be
characterized by descriptions such as ' l e f t - r i g h t ' or 'near-far'. Rather,
metric relations such as angle and distance are appropriate i n t h i s domain,
especially as they are precisely known for the DTM. Using metric relations
becomes more important when matchings between i n t r i n s i c aspects of features,
such as shape, length or position, are less r e l i a b l e .
2.5.2 Geometrically Constrained Matching
Fischler and Eschlanger (1973) d e t a i l a method for matching a reference
image i n raster format to a reference image which i s described by a graph

24
composed of components (coherent pieces of the model). For each of these
components, a l o c a l evaluation array (LEA) i s computed. The LEA measures
the goodness of f i t of each component of the model at each point i n the
image, rather l i k e the goodness of f i t of a template at a l l points i n the
image. The model components are assumed to be joined together by springs.
The cost of a matching i s the amount of tension i n the springs j o i n i n g the
"components. This method i s compatible with a 'rubber-sheeting*
transformation of the image, i n which d i r e c t i o n i s not g l o b a l l y preserved
and scaling can vary across the image.
Dynamic programming i s used to solve the matching problem. Using the
LEA, the cost of orienting the constituent component subassemblies can be
computed, recorded i n tabular form, and used to f i n d a global minimum cost
matching. The cost of t h i s method increases exponentially as the degree of
interconnection of the components r i s e s . As an alternative, the authors
suggested an incremental method, very similar to Barrow and Popplestone's
technique. The work i s of note i n two respects: f i r s t , i t constructs a f u l l
transformation from one image to the other, and second, i t uses geometric
constraints as w e l l as semantic constraints i n the matching. The
re g i s t r a t i o n method presented i n t h i s thesis uses an incremental method.
Bajcsy and Chance (1975) studied the problem of establishing the
correspondence between images of brain s l i c e s before and after chemical or
physical operations i n which there i s appreciable shape d i s t o r t i o n of the
brain. The images are processed to extract the veins i n the images. The
nodes (vein junctions) are ordered by degree. A matching i s generated by
comparing the degree of junctions from the two images. Because i t i s l i k e l y
that an edge i n one graph w i l l show up i n another, t h i s seems an appropriate
strategy. The graphs are not t o t a l l y matched i n t h i s process; rather, the

25
i n i t i a l matching i s used as a 'seed' to a r e g i s t r a t i o n procedure which
perturbs the i n i t i a l mapping s l i g h t l y i n order to reach an optimal match.
The authors state that without such an i n i t i a l match, the h i l l - c l i m b i n g
method of the r e g i s t r a t i o n i s not s u f f i c i e n t l y constrained and might 'walk
o f f the edge of the image'.
Work at SRI (Bolles et a l . , 1979) models the transformation from the
test image to the reference as a function of camera parameters, such as
f o c a l length, position, yaw, pitch and r o l l . The reference i s a 'database'
of highways and features of highways. An essential part of the SRI method
i s that there i s a good 'a p r i o r i ' estimate of the camera parameters and of
the errors i n these parameters. These estimates are used to predict the
location and extent of the region i n the image which i s to be searched for
an element from the reference image. The predicted search region for an 0
element i s termed i t s 'uncertainty region'. "Once an element i s located
within i t s search region, the search regions for other elements are
constrained i n location and siz e . The pairing of reference element and
image element provides new information which i s used to improve the camera
parameters and reduce the errors. Both line a r and point features are
hand-selected from the reference image for r e g i s t r a t i o n . Because highway
structures, such as the boundaries of lanes, are l o c a l l y very s i m i l a r , i t i s
possible to mistake a feature for one o f f s e t from the proper match. To
prevent t h i s s i t u a t i o n , the system i d e n t i f i e s features nearby which can be
used to v e r i f y a match, and searches for them i n the image. For example,
highways are composed of several p a r a l l e l lanes; i n detection of a highway
the system searches for l o c a l l y o f f s e t lanes to confirm the matching of
others. This notion i s termed ' l o c a l support' for a feature match. The
matching of elements provides information for the correspondence refinement

26
process which solves the nonlinear camera parameter estimation problem.
Bolles (1979) describes a further use of the maximal clique method for
matching features i n an image with a model. Nodes i n the feature graph
represent l a b e l l i n g s of nodes. /Arcs represent compatibility relations
between the l a b e l l i n g s of features. These relations are based on distance
and orientation measures computed i n the image and compared with model
descriptions. A maximal clique i n t h i s graph represents a maximal match of
the features of the image with the labels i n the model. As with a l l maximal
matching methods, there are d i f f i c u l t i e s with the combinatorial behavior of
the problem and the inordinate size of the graphs; generating graphs for
reasonable problems i n i t s e l f i s time-consuming. Bolles (p. 144) suggests
several ways of improving the method:
1) R e s t r i c t the model to key features
2) Use geometric l i m i t s with respect bo some feature to exclude
unnecessary features.
3) I t e r a t i v e l y apply the maximal clique method to refine the
assignment.
With respect bo the l a s t point, Bolles further states "the benefit of t h i s
approach i s derived from the fact that the st r u c t u r a l constraints are
applied sequentially instead of a l l at once" (p.145).
In general, methods for maximal matching suffer from the d i f f i c u l t i e s
encountered i n Bolles*s method. E x p l i c i t construction of the relations
which may hold between elements of the model and the features of the image
i s i t s e l f an expensive task. The re g i s t r a t i o n method presented here follows
the s p i r i t of Bolles's work. The method depends upon an analysis of the

27
model to f i n d promising features of the model. These are found i n the
image. Nearby features of the model are used to confirm the i n i t i a l
matching. Then additional features are selected for matching, from the
r e s t r i c t e d set constrained by the previous matches. Local support for a
feature acts as a breadth-first look-ahead to select promising matches,
following which a depth-first search i s conducted for further matches. In
addition, once an estimate for the matching has been constructed, i t i s
l o c a l l y adjusted to improve the r e g i s t r a t i o n .
These facets of the method anticipate the suggestions of Bolles. The
illumination conditions at the time of image acquisition are used to
determine the features. Key features are selected based on the s t r u c t u r a l
complexity of t h e i r components. The geometric constraints of the transform
derivation guide i t s development. Lastly, the inspection and rejection of
choices at early stages of the search deliver the benefits of sequential
exploration of the p o s s i b i l i t i e s .

3. The Registration Method
The r e g i s t r a t i o n method proceeds i n several stages. The data consist
of the raw Landsat image and a d i g i t a l t e r r a i n model (DIM) for the area
imaged. The time at which the image was acquired i s known. In the f i r s t
stage, features of the d i g i t a l t e r r a i n model and the Landsat image are
derived. The second stage considers matchings of three features from both
the DTM and the image. Each match determines the parameters of an a f f i n e
transformation. When one of the derived transforms predicts other
ridge-to-Landsat feature pairings, with a s u f f i c i e n t l y small t o t a l residual
error, the transformation i s accepted. Otherwise, r e g i s t r a t i o n f a i l s .
3.1 The F i r s t Stage; Feature Extraction
3.1.1 Extracting Features from D i g i t a l Terrain Models
Since the sun's position corresponding to the Landsat image i s known,
i t i s possible bo determine the location of convex breaks of slope which
w i l l appear i n the image with strong brightness d i s c o n t i n u i t i e s , as follows:
The slope of each surface facet i s derived and the brightness of the facet
determined using the reflectance function. For every location i n the TIN
where surface slope changes (represented by the junction of facets), the
brightness of the surface facets adjoining i s computed. The difference
between these values indicates the r e l a t i v e magnitude of the brightness
discontinuity to be expected at that position. In testing the method, only
those edges are selected which are bounded, on one side, by a self-shadowed

29
facet (one which receives no d i r e c t illumination), and, on the other side,
by a facet whose predicted brightness i s r e l a t i v e l y high (figure 10) . This
r e s t r i c t s the features to a small subset of a l l edges which w i l l generate
brightness d i s c o n t i n u i t i e s . Many ridges w i l l not be self-shadowed on one
side, but w i l l nevertheless appear as sharp d i s c o n t i n u i t i e s i n the image.
However, areas i n self-shadow, i f present, w i l l be very dark i n the image,
and t h e i r appearance w i l l be less sensitive to ground cover v a r i a t i o n .
Self-shadowed ridges tend to l i e perpendicular to the azimuthal d i r e c t i o n of
the sun. This leads to strong constraint along the d i r e c t i o n p a r a l l e l to
the azimuthal d i r e c t i o n of the sun, but l i t t l e constraint i n the orthogonal
di r e c t i o n . Pairings of features at junctions or endpoints of features
provide the needed constraint i n the orthogonal d i r e c t i o n . Edges s a t i s f y i n g
t h i s c r i t e r i o n are merged into curves when their endpoints are adjacent and
merging them does not cause the resulting curve to loop back upon i t s e l f .
Only those curves are output which represent a strong brightness
discontinuity. These curves w i l l be termed "ridges" i n the following
discussion of the re g i s t r a t i o n method, while noting that the curves can be
generated both by t e r r a i n ridges as w e l l as other convex breaks of slope.
The features extracted from the DTM are shown i n figure 4.
3.1.2 Extracting Features from the Landsat Image
In the Landsat image, some surface slope breaks appear as boundaries at
transitions between bright and dark regions. Desirable boundaries are those
formed by convex breaks of slope oriented perpendicular to the azimuthal
di r e c t i o n of the sun's illumination. Shadow boundaries also appear as
transitions between bright and dark regions, but, since the d i r e c t i o n of the

30
Figure 10 Self-shadowed sur faces.

31
incident illumination i s known, they can be distinguished from the
t r a n s i t i o n features formed by ridges. Shadows are dark on the side o f the
edge nearer the l i g h t source. Figure 11 shows the Landsat image subsection
used for the r e g i s t r a t i o n tests.
3.1.3 Selecting Feature Points
The Landsat image i s correlated with an edge detector composed of two
orthogonal components. The 5x5 Sobel operator (Iannino and Shapiro, 1979)
was used because i t had been reported to y i e l d acceptable re s u l t s , i n the
l i t e r a t u r e . The r a t i o of the outputs of the components of the operator
provides an estimate of the dir e c t i o n of the boundary element passing
through the p i x e l s tested.
The edge detector gives high values not only at d i s c o n t i n u i t i e s , but
also at p i x e l s o f f s e t from the d i s c o n t i n u i t i e s . This produces secondary
l i n e s , c a l l e d echos, l y i n g p a r a l l e l to the o r i g i n a l (figure 12). In order
to eliminate these as early as possible a scheme of Nevatia and Babu (1979)
i s used, to edge element i s judged to e x i s t at a p i x e l i f :
a) the magnitude of the f i l t e r output i s above a threshold b) i t s magnitude i s higher than that of i t s two neighbors i n the d i r e c t i o n normal to the estimated edge d i r e c t i o n , and c) the edge directions of these neighboring p i x e l s are within 45 degrees of the d i r e c t i o n at the central p i x e l .
I f any of these conditions do not hold then no edge element i s judged to
e x i s t . The e f f e c t of t h i s process i s to suppress the echo elements at an
ea r l y stage, eliminating the need for l a t e r curve thinning procedures
(figure 13).

32

33
******* ****
* ***** ** ******** ** ************ ******************* ********************* ********************* ******** ** ********** ** ******** *** ** *************** ***************** ****
*** **** ***
*** ***
*** ***** ****** ***** **** * *** **
** *** **** ****** ***** ******** ***** ************ * ************ ****** ** ******** ****** ***** ****** ***** ************** ************ ***************** *********** ***** ********* *** *** *
********* **** ******* ** ******* **** ***** ****** *** *****
* * * * * * *
* * * * * * * * * * *
* * * f * *
*** ***** ***************** *************** ************
** **** ***
*** * * ** **** ****** ****** ****** ******** ********* ************ ************ ********** ******** ********
*** ***** ****** ******* ****** *** ***** ******** ************** ****************
***** ********* **** ** ***** ****** ********* *********** ************ ****** *** ****** ******* ******** ********* ********* ******* ******
********************************* ******************************** ************ ********************** * ******* ******************** *** ****** *************************** ***** ********************** ******** ********* ******** ************* ****** ******* ********** ****** ********** ******** *** *********
************ ************** * ****************************** ***** ********* ****************** **** ** ******** ********************** **** ********** **************** ****** **** . ******** *********************** ** * ******* ** ******** ***********
** **** * * *** *** ******* **** ******* *** ****** * ****** *** *** ********** * ***** ***** * ***** **** * ***** ** "**** **** ****
* ******** *** ** ******* ******* **** * ***** ******* * **************** ********************* ******************** ********************* ********************** ******************** ************ ******** ************* ****** ************** ******* ** *********************** ******************************* ****************************** **************************** * **************************** ***************************** *************************** ***************************** ********** ******************* ****************************** **** ************* ** ******* *** ******* ******* ******
**** ****** ****** ****** ******* ****** ****** ****** • ******* ******* ******* ******* ***** *** ***
*** **
*** ***
*** *****
***** ******** **** ************ ******, * *****
****** ***** ** **
********** *********** *********
*****
*** *** *** ****
**** *****
******** ***********
****** ***** *
***** * ***** *
****** * ******** **.
********* *** *********
*********** ************
**************** **************** * **************** **** *********** **** *** *
*********** *** ******* * ********************** ***** ***** ************************ ****************** **** ******** ****************** ****** **** * ********* ** ****** ******* ****** ****** ********** ***** ** *************** * ********* *******
*******
** ********************* * ***************** *******. ******************* ** ********************** *** ***************** **** ***** ************ ****** **** ****** *********** ********* ******** ****** *********** ********** ****************** ***** ******************* *****. ******************** *** ***** *********** ** ***** ***
******* ******
**** ' ***** *******
********** *******
****** *******
** *** ****** *** ** ********* ** *** *********** **** ************ ***** * *********** **************** ** ** **
************ ********** ************* *********** ****************** ****************** ******** **** * ********** ** ** ************ * ***************** ** ***************************** ************ *************** ******************* ************ *************** ******************** ***************** ** ***************** *** ************** ************************ **
*********** *********** ******** ****** * **** ***********
******** ********* ********* ********** *********** *** ************** * **** ************
* ********** ******************* **** ******************** ***** ************************ **************************************
** ************** *** *********** ****************** *** **** *********
************' *** ****
**** ****
***+ *********** *** **** **** * **** +** *****
** . ********** ************* * ****************************** ******************************
*********************** ********* ********** ******* **** **** *** * *** ***** * ****** ***** ****** *********** ******* ******** ******* ******** **** *********
****** *** *** ** ********** • *** ** ********
***
****** ******* *** **** ******* ******* -********* ************ . ***************
** ***
***
********** • *** ** *** *********** ***
*** **** *************** ************** ************** ************** ***************** **** ************************************ ******** ************************** ********* ******* ******************** *************** •
****************** ****** ********************* ***************** *****************^ ************ ******************
J.*i*J.J.J.XJ.J.J.J.J.iJ.J.J.J.J.̂ ********** **** ************* ******** ** *******************
***** ******* *******
************************************* *** ************* ******************
********** ********** *** ********* ******** ******** ********* ********* **** ************ * . : . - • -. * * * * * * * * * * *
********* * ******* ***** ** **** **
Figure 12 i
Result of applying the edge detector. **s represent edge elements whose o r i e n t a t i o n i s consistent with the sun's posi t i o n .

34
***** ********* **
*** ***
**** ***
*** ***
*** *** *** ** ****
** **
**** ****
** ******
** *** ** *** * ** **
*** *** ** *** *** ******* ***
***
** ** * *
*** ** * * ** ** **
* ** **
**** ***
** ****** *** * ****
* ** ** ****
* ** ***********
*** * **
** ** * *** * * *
***** *** ***** * ****
** * ** ****** *** *
*** **
*** ** *** **
*** .***
*** *** .** ** * * *
** ** . ** ** ** *** *** ***** . *
*** **
************ ******** ***** * ***** *
* ****** **
*** ********** ***** * ** **** * * *** ** **
** ** '** **
* * * * ** *
** .
* *** ***
Figure 13 Edge detector output after echo suppression.
35
3.1.4 Line Growing
The output of the Sobel operator i s used to construct the line a r
features, following the method of (Bajcsy and Tavakoli, 1976). The process
i s divided into two steps. F i r s t , p i x e l s are connected into curves
represented as sets of p i x e l s . Next, a piecewise l i n e a r approximation i s
derived for these curves, and curves are merged when possible. In the
discussion which follows, the terms " l i n e " and "curve" w i l l be used
interchangeably to refer to a s t r i n g of points connected by st r a i g h t l i n e
segments.
In the f i r s t stage, a histogram of the values of the f i l t e r output i s
derived. This density histogram i s used to d i r e c t the process so that l i n e s
are 'grown1 from those points which had the highest output from the
f i l t e r i n g step. A cumulative d i s t r i b u t i o n function i s derived from the
density histogram. At each step i n the l i n e growing process, the threshold
i s relaxed so that f i v e percent more p i x e l s are above i t . I n i t i a l l y the
threshold i s set at the 95 percent l e v e l .
At each stage i n the l i n e construction process, the threshold i s set at
the proper l e v e l and a l l points i n the image above the threshold and not
already i n a l i n e are processed. The threshold i s then lowered a l e v e l , and
the process repeated, u n t i l the minimum l e v e l i s reached. Lines are
constructed incrementally i n t h i s f i r s t stage; at f i r s t a l i n e consists of a
single point. When an adjacent point l i e s above the current threshold, and
cannot be joined to any e x i s t i n g l i n e , i t i s joined to the single point and
forms a two-point l i n e . To ensure that the l i n e s found have less than a
certain maximum curvature, points are added to an e x i s t i n g l i n e only i f they
are adjacent to the endpoints of the l i n e and the segment connecting the new

36
point to the endpoint l i e s within 45 degrees of the d i r e c t i o n of the nearest
segment i n the l i n e .
The r e s u l t of the f i r s t stage i s a set of l i n e s each consisting of a
set of connected p i x e l s . Figure 14 shows these l i n e s ; at each p i x e l the
l a s t d i g i t of the curve to which that p i x e l belongs i s printed. In the next
stage, these l i n e s are merged into larger connected l i n e s when two
conditions hold: f i r s t , the l i n e s are adjacent at t h e i r endpoints, and,
second, the segment directions are compatible, that i s , j o i n i n g the two
l i n e s at the i r endpoints does not cause the resulting curve to loop back
upon i t s e l f . The segments are compatible i n d i r e c t i o n i f the dot product o f
the segments, considered as vectors or i g i n a t i n g at the common endpoint, i s
less than or equal to zero (figure 15). Figure 16 shows the curves after
merging. To aid i n curve merging, a piecewise line a r approximation i s
derived for each of the curves.
3.1.5 Approximations to Lines
A piecewise l i n e a r approximation to a d i g i t a l l i n e (Ranter, 1972;
P a v l i d i s , 1977) approximates a l i n e to a given precision by a set of l i n e a r
segments connecting points on the l i n e . In i t s construction, the f i r s t and
l a s t points i n the l i n e are connected by a straight l i n e segment. The
extreme points l y i n g farthest i n perpendicular distance from the l i n e
segment are determined, B and D i n the example shown i n figure 17 . The
extreme points are included i n the approximation i f t h e i r distances from the
segment are above the specified threshold, which w i l l be termed the " d e t a i l
l e v e l " of the l i n e . The l i n e i s then subdivided into the three sets of
points to the l e f t , between and rig h t of the selected points. The three

37
o 05
60 1 1 1 6
7 166 I , 71 J 2 11
,3 8 2 918 9 „ 1 8 990 8 1 9 8 49
5 0 1 9 449 5 1 6
7222 22
223 24
524 252
25 825
222 9 7777 20
73 888 3
184 3 J
6 3 3
9
0 0
90 75 19 75 666
„i9 7 5 666 J 9 75 2 09 75
0 77 7
7 17 7.
72 37 7
88 89
89 8
84
8884
884 0 988
11111 015
28 28
2 24 4
11
98 98
66661"" 777 go 8
8888 57 2 91 39
8 81 8 8
15 3 44 8 6657 15 93 8 1 666 69 8
„?, 2 8
09 7 8 0 8
01 01
701 3 00
5 8 22 56 77 3 88
56 435 8 9 0000 4
555 04
29 29
220 324
55555
11
9
5 1 9 3
i 2
F i g u r e 1 4
L i n e s b e f o r e m e r g i n g . T h e d i g i t a t e a c h p i x e l i s t h e l a s t d i g i t o f t h e n u m b e r o f t h e l i n e t o w h i c h t h e p i x e l b e l o n g s .

38
compatible segments
incompatible segments
Figure 15 Two l i n e s can be merged i f the dot product of the segments at the j o i n point i s negative.

39
o 05 6
10 f>
666 8 76 8 2 66
1 8 2 668 1 8 668 1 8 660
0 1 9 8 66 5 0 1 9 666 5 1 6
7666 -66
663 64
664 6 266 6 26
8 2 6 2 2 2 9
8888 20 9 8 3
888 3 184 3 8 35 8 1
0 °
l8° il" 222 10 75 222
0 0 75 2 3
0°° T 7 7 5
} 7 5555 7 2 e5,5
37 59 7 59
7 5 7 54 7 554
955 0 95
11111 9 5 015 9 5
11111 777 „ 55 1111 57 2 5 1
11 35 H r t 5 1 55
11 5 5 0 1 554
11 55555 15 8 44 8 5557
15 88 8 1 6 6 6 68 8
8 28 88 7 8
8 8 8 1
8 1 7 8 1 3
88 8 4
5 8 22 56 77 2 88 9
5 6 225 8 9 2 2 2 2 2
555 22 8 8 1 „
8 11 8 • • " • : . • • • . . . . • „ • . - • :
9 2 9
2 2 3 2 2 . 3
2 4 2 ,
3 2 4
F i g u r e 1 6
L i n e s a f t e r m e r g i n g . T h e d i g i t a t e a c h p i x e l i s t h e l a s t d i g i t o f t h e n u m b e r o f t h e l i n e t o w h i c h t h e p i x e l b e l o n g s .

40
F i g u r e 1 7
A c u r v e a n d t h e t r e e r e p r e s e n t a t i o n o f i t s g e n e r a l i z e d f o r m .

41
subsets of the l i n e are processed recursively i n a similar fashion. In
figure 17, these subsets are TAB, BCD and DEF. I f the point farthest from
the segment i n a p a r t i c u l a r subset i s within the threshold distance, then
processing of that subset of the l i n e i s stopped, and only the endpoints of
the l i n e segment retained. The process of finding such an approximation i s
termed 'generalization'. The t r e e - l i k e structure derived i n t h i s fashion i s
useful i n cartographic computations (Ballard,1979). A tree for a
generalized form of a curve i s also shown i n figure 17.
By varying the d e t a i l l e v e l used i n computing the curve approximation,
a family of approximations i s generated (figure 18) . A l t e r n a t i v e l y , the
perpendicular distance of a point i n the curve from the next highest l e v e l
segment can be recorded i n the approximation. The distance so found i s a
measure of the significance of that point i n the approximation of the curve.
By constructing two l i n e s , p a r a l l e l to and o f f s e t from a given segment
of a curve, and at a given perpendicular distance, a region i n the plane i s
described which i s c a l l e d the 'band' of that segment of the curve. When the
segment connects the endpoints of the curve, the region i s the band of the
curve (figure 19). The d e t a i l at which the curve i s examined can be varied
by a l t e r i n g the perpendicular distance at which the band i s constructed.
The band of a curve w i l l be used to determine whether a curve overlaps
another, i n curve comparison and i n testing of the r e g i s t r a t i o n .
Since most of the l i n e s i n the Landsat image contain many colinear
points, the l i n e approximations contain s i g n i f i c a n t l y fewer points than the .
the o r i g i n a l l i n e s represented as connected sets of p i x e l s . Using the
approximations, d i r e c t i o n a l decisions involving the orientation of l i n e
segments are less affected by perturbations at the end of curves caused by
quantization. The output of the feature-detector i s the set of l i n e s i n

42
F i g u r e 1 8
V a r y i n g t h e d e t a i l l e v e l i n g e n e r a l i z a t i o n . T h e d o t t e d l i n e s r e p r e s e n t t h e g e n e r a l i z e d f o r m o f t h e c u r v e a t e a c h l e v e l .

Figure 19 The band of a curve.

44
generalized form, which are longer than a specified minimum length (figure
20). These cu r v i l i n e a r features derived from a Landsat image w i l l be termed
"l-edges".
Since the ridges are derived from the TIN representation, they are
represented as a s t r i n g of contiguous l i n e segments. I t i s natural to
convert t h i s form to the piecewise lin e a r approximations used for curves
found i n the Landsat image. I f a DTM feature i s represented by a single
straight l i n e segment, then i t i s 'simple'. Any curve whose representation
includes i n t e r i o r points i s said to be 'structured*. The ridges and l-edges
are input to the second stage.
3.2 The Second Stage; Matching
The basic approach i n the second stage i s to locate the known features,
the ridges, i n the image. Features are located sequentially, and the
location of a feature i n an image w i l l constrain search for other features.
Ridges w i l l be located by s t r u c t u r a l l y matching ridges with l-edges. A
ridge matched to an 1-edge i s a "pairing". A pairing locates a ridge i n the
image and provides a pair of matched points which are used as ground control
points (section 3.4). Because of the sequential nature of the algorithm, i t
i s useful to introduce an ordering.
The ridges are considered i n the order of thei r s t r u c t u r a l complexity.
This i s because i t i s assumed that the more strongly an element d i f f e r s from
a straight l i n e the less l i k e l y i t i s to be matched incorrectly. The goal
of the matching process i s to pair a s u f f i c i e n t number of ridges and l-edges
to compute transform parameters. Features i n the DTM are ordered as
follows:

45
F i g u r e 2 0
L a n d s a t i m a g e f e a t u r e s f o r s u b s e c t i o n i n f i g u r e s 1 1 - 1 6 .

46
1. M l structured ridges are considered before simple ridges (figure 21). 2. The strength of a ridge i s the product of i t s length and the estimated brightness discontinuity across i t . Structured ridges and simple ridges are each ordered according to the ridge strength.
The r e l a t i o n of structured feature to structured feature i s p o t e n t i a l l y
a many-to-many r e l a t i o n . A portion of a ridge may be represented by two or
more l i n e segments while the corresponding 1-edge i s represented as a single
l i n e segment, or vice versa. To consider a l l possible relations between two
structured curves means examining the relations between a l l powersets of
both. Representing and manipulating such relations s i g n i f i c a n t l y
complicates curve matching. Consequently, a l l structured features i n the
landsat image are broken down into simple elements, represented by single
l i n e segments.
3.3 The Affine Transformation
Horn and Woodham (1979) demonstrate that, i f small, second-order
ef f e c t s are ignored, an aff i n e transformation i s s u f f i c i e n t to register
small subsections of a Landsat image to a plane tangent to the earth's
surface. The parameters of t h i s transformation can be expressed i n terms of
the parameters of the s a t e l l i t e ' s o r b i t and other fixed quantities. An
aff i n e transform has 6 degrees of freedom and can be written as:
x' = a x + b y + c
y ' = d x + e y + f
where x,y are image coordinates and x',y' are DTM coordinates. A subset of

47
F i g u r e 21
S t r u c t u r e d ( A ) a n d s i m p l e ( B ) r i d g e s .

48
a f f i n e transformations can be expressed as a composition of rotation,
translation and scaling of the coordinate axes. However, the f u l l y general
affine transform does not admit t h i s simple decomposition.
Finding the tranformation parameters requires at least three matched
points. These can be determined manually by ide n t i f y i n g ground control
points i n both the DTM and the image. Let the coordinates of the image
points be ( X j , y t ) , (x^,y 2) and (x^y^) and the DTM coordinates be (x ,y ( ),
( x 2 ,y ) and ( x } , y 3 ) . Then
x, y, 1 a d x . y i x l Y i 1 • b e — x 3 y 3 l c f
so -1 a d b e c f
x, y» 1 x i Y t 1
/ /
X V
I f more than three GCP's are supplied, a least-squares estimate of the
transform can be computed. I f
M
x» y, i x z y z l
V n 1
Then the least-squares estimate with equal weighting to a l l points for the
transform parameters i s :
a d b e c f
T - « T (M-M) • M
x,» y.i y*
X.
Once three feature pairings have been established, the affi n e transform
can be estimated. A set of three pairings w i l l be termed a 'matching' and a
set of more than three pairings an 'extended matching'. Exhaustive

49
examination of a l l matchings i s too expensive. The number of t r i p l e s grows
as n . Hence the number of matchings grows as n , where each of the feature
sets i s of c a r d i n a l i t y n. Knowledge of the constraints imposed on the
problem i s used bo l i m i t the search space. An estimate of the a f f i n e
transform i s derived (following Horn and Woodham, 1979) from o r b i t a l
parameters included i n the image annotation, and other fixed parameters of
the scanner. Section 4.4 presents the analytic expressions for the
parameters of the a f f i n e transform and describes the parameters of the
s a t e l l i t e o r b i t . Because t h i s estimate of the transform i s available, i t
can be used bo eliminate the generation of some incorrect matchings.
3.4 Construction of a Pairing
I n i t i a l l y , the location of an image feature i n the DTM i s known only to
within 10 kilometers. This delimits a search region for a feature. The
system begins by selecting a ridge and finding the l-edges i n i t s search
region. Each 1-edge i s transformed according to the 'a p r i o r i ' transform
estimate, and compared with the candidate ridge. The basis of the
comparison i s the representation of a curve as a piecewise l i n e a r curve.
The construction of t h i s representation, as described i n section 3.1.5,
involves determination of the d i r e c t i o n of the curve, which i s the d i r e c t i o n
of the vector connecting i t s endpoints. The band about the curve i s a
region i n the plane bounded by two l i n e s p a r a l l e l bo the d i r e c t i o n vector
and o f f s e t from i t by a fixed amount. The width of the band i s the distance
between the p a r a l l e l l i n e s . Assessment of a pairing of features proceeds as
follows:

50
a) I f the ridge i s simple, the transformed 1-edge i s translated so that one of i t s endpoints coincides with an endpoint of the ridge segment. The perpendicular distance D from the ridge to the other endpoint of the 1-edge i s computed. There are three cases:
1) D i s less than or equal to the band width. The positions at which the 1-edge can be matched include a l l points i n the ridge segment. In practice, three positions are used (figure 22): at either endpoint, or at the centerpoints, the averages of the endpoints of the segments. 2) D i s less than twice the band width. The 1-edge i s constrained to match i t s centerpoint to the centerpoint of the ridge (figure 23). 3) Otherwise, the pairing i s rejected.
In cases 1 and 2, the measure of goodness of the match i s the cosine of the angle between the two curves. In case 3, the measure of the match i s a r b i t r a r i l y set to 0. The translation vector for the pairing i s constructed from the difference of the matched points.
b) I f the ridge feature i s structured, then the 1-edge i s compared with each of the l i n e segments i n the ridge as above. The r e s u l t of the comparison i s a l i s t of matchings of the 1-edge with each of the segments i n the ridge.
I f structured l-edges were used i n pairing development, endpoint matches
could be confirmed on the basis of the r e l a t i v e orientation of the segments
meeting at that endpoint. Local context i s provided by the adjacency of
segments. In the present system, l o c a l support for a pairing serves t h i s
purpose.
The r e s u l t of a match determines a point-to-point correspondence which
i s used i n estimating the a f f i n e transform. The l i s t of pairings of ridge
and l-edges, sorted by value, i s associated with the ridge. Pairings whose
value i s too small are not allowed to enter into the construction of a
matching. This acts to eliminate pairings which can only arise from
combinations of rotation, scaling and skewing inconsistent with the known
imaging geometry.

51
Figure 22 Close f i t i n a p a i r i n g , with the three matching p o s i t i o n s .

52

53
3.5 Support for a Pairing
A p a i r i n g s p e c i f i e s a translation vector. The residual error i n
position of an image feature after transformation can be modeled as a
translation. Hence the translation needed bo bring a transformed 1-edge
inbo correspondence with a ridge i s used to guide the development of
matchings. Each subsequent pai r i n g must be consistent with the previous
pairings, that i s , the translation required to construct the pairing must be
similar to those previous. S i m i l a r i t y between translation vectors i s
measured by treating each translation as a point i n the plane and finding
the distance between the points. I f the distance i s too large, the
translations are incompatible. Otherwise, the translations are considered
consistent. Testing translation consistency eliminates the generation of
many incorrect matchings.
Experimentation with the feature sets has shown that translation alone
i s not a s u f f i c i e n t constraint. For example, the location and orientation
of ridges i s often controlled by the underlying geological structure of the
region. Ridges are often p a r a l l e l or nearly so, and the spacing between
ridges can be very regular. Hence, a pairing of a ridge to an image feature
may be correct i n orientation, but o f f s e t by the inter-ridge spacing.
Consider the following example: The problem i s to register the image
resembling the numeral 4 represented i n figure 24 to a model of the numeral.
Image segments are referred to by t h e i r endpoints, ABCDEF, and the model
segments by the same l e t t e r s , with quotes, A'B'C'D'E'F'. In t h i s example,
i f segment A-C i s compared with B-D, the match w i l l be high i n value,
assuming an i d e n t i t y a p r i o r i transformation. Orientation and length of the
segment do l i t t l e bo distinguish A-C and B-D. To eliminate incorrect

B
0 — E
F
a)
A. Bi A iB
/ i
D! E C
i /
Figure 24 An image (1), i t s model (2), and a mis-match demonstrate support for a matching.

55
matchings cause by t h i s phenomenon, the l o c a l s p a t i a l structure of both the
ridges and the 1-edges must be used to guide the matching. In terms of the
example, note that when A-C i s registered to B'-D', C-D overlaps D*-E',
p a r t i a l l y confirming the match with B'-D'. But when A-C i s paired with
A'-C1, a l l segments i n the image w i l l p a r t i c i p a t e i n a pairing consistent
with that involving A-C.
When an i n i t i a l p a i r i n g of features i s made, nearby ridges are examined
and a t a l l y i s kept of the number of nearby ridges which can be paired with
1-edges i n a matching consistent with that under construction. Consistency
here i s again measured by comparing the translations necessary to bring a
feature into alignment, under the a p r i o r i transform, with a given 1-edge.
I f a structured ridge i s being considered, the t a l l y i s formed by counting
the number of segments i n the ridge which can be paired with 1-edges under
mutually compatible translations. Developing a pa i r i n g o f the elements of a
structured ridge with several simple 1-edges compensates somewhat for the
decomposition of structured 1-edges into separate simple features. The
simple 1-edges can be paired with the elements of a structured ridge as they
would have been had they s t i l l been joined i n a structured 1-edge. The
pairings of ridge and 1-edges are ordered by the number of supporting
pairings, ( i . e . , by the extent to which they can be l o c a l l y extended). This
strategy can be understood as a generalization of the scheme of determining
l o c a l support for lin e a r features employed i n the SRI system (Bolles et a l . ,
1979).
At t h i s point, a feature (whole or part) i s matched to a 1-edge, and a
set of compatible pairings has been generated. Each of the elements i n t h i s
set i s i n turn selected as the second pairing for the matching. By
selecting other ridges with translation-compatible pairings as the t h i r d

56
part of the match, the matching i s extended to include three mutually
translation-consistent pairings of features. With the s i x values from the
matching, an affi n e transform can be determined. Each pairing of a ridge
and an 1-edge provides a point-to-point match for the parameter
determination.
3.6 Consistency o f the Transform
When an affi n e transform i s determined for a set of three point
pairings, the resulting transform w i l l predict the points with no error.
Hence i t i s necessary also to test how the transform predicts the segments
passing through the matched points. This f i r s t estimate of the transform
computed from the three pairings i s tested for self-consistency. The
transform i s self-consistent i f , using the new transform, the transformed
1-edges and th e i r matching ridges overlap (figure 25). Many matchings y i e l d
inconsistent transforms, which are rejected. This avoids the r e l a t i v e l y
expensive procedure of predicting and v e r i f y i n g feature locations.
3.7 V e r i f i c a t i o n
I f the transform i s self-consistent, i t i s then used to predict the the
location of the remaining 1-edges i n the t e r r a i n model. When a 1-edge i s
compared to a ridge, i t i s examined at the positions for matching as
described above (3.4). I f the 1-edge l i e s within a narrow band of the
appropriate segment on the ridge, the points corresponding to that match are
entered as the match points, and the features are matched. The number of
1-edges which overlap e x i s t i n g ridges i s used as the measure of the q u a l i t y

57
(1)
(2)
• _ Figure 25 •. In a self-consistent transform (2), the bands of the ridges overlap the transformed l-edges (dotted l i n e s ) . When the transform i s not self-consistent (1), the l-edges extend outside the bands. A-C are the matched points.

58
of the matching. Also the average and root-mean-square of the differences
between points i n the DTM and t h e i r matched 1-edge points are calculated.
I f enough features can be matched i n t h i s way, the set of pairings i s used
to form an extended matching, from which a least-squares estimate o f the
affi n e transform parameters i s computed. In t h i s extended matching, any
point pairs whose associated error i s larger than the average error are
rejected. In a good matching most of the point pairs produce errors less
than the average. Removing pairs with large errors and re-computing the
transformation i s a h e u r i s t i c for improving the r e g i s t r a t i o n . The new
transform i s computed from the remaining pa i r s . This transform, i n turn, i s
used to predict the location of the l-edges i n the DTM. I f the matching
improves, a new least-squares estimate of the transform i s computed. This
i t e r a t i v e process terminates when error terms are s u f f i c i e n t l y small and the
number of features predicted i s s u f f i c i e n t l y high. Indeed, i f the average
and RMS errors are less than a p i x e l , searching stops and success i s
indicated.

59
4. Implementation and Testing
4.1 The Input
To test the method, a 100x100 p i x e l subsection of a Landsat image
(figure 1) i s registered to a d i g i t a l t e r r a i n model. Band 7 of the Landsat
image was used because the effects of t e r r a i n r e l i e f are most apparent i n
that band. The Landsat image was acquired on September 14,1976 (frame ID
11514-17153). The d i g i t a l t e r r a i n model was d i g i t i z e d from the 1:50,000
series contour map, Canadian National Topographic System (NTS) sheet 82 F/9,
(St. Mary Lake), covering an area from l a t i t u d e 49 degrees, 30 minutes to
lat i t u d e 49 degrees, 45 minutes and i n longitude from 116 degrees to 116
degrees, 30 minutes. This area i s northwest of Cranbrook, B r i t i s h Columbia.
/An area, 30 kilometers by 23 kilometers, i s represented i n the TIN d i g i t a l
t e r r a i n model by approximately 5500 points. This t e r r a i n model was u t i l i z e d
i n other research on modeling image formation i n remote sensing
(Woodham,1980).
The DTM was prepared manually by the author. The ridges and channels
of the area were d i g i t i z e d . Additional points were included to shape the
te r r a i n surface between the ridges and channels. The complete set of points
was triangulated, and automatically edited to include the edges joi n i n g
points along the ridges and channels. When a TIN format DTM i s not
available, there exist'automatic procedures for converting a DTM i n g r i d
format to a TIN (Fowler and L i t t l e , 1979).

60
4.2 Programming Languages
Implementation of the various parts of the system has been accomplished
i n several d i f f e r e n t programming languages. The procedures to extract
features from a DTM and brightness d i s c o n t i n u i t i e s from a Landsat image were
both written i n PASCAL-UBC ( J o l l i f e and Pollack, 1979). Brightness
d i s c o n t i n u i t i e s are not derived on demand during r e g i s t r a t i o n , but are
determined i n a preprocessing step. The DTM and the image are not available
during r e g i s t r a t i o n matching. Registration matching uses ridge features and
Landsat features written to a n c i l l a r y f i l e s during the preprocessing steps.
The r e g i s t r a t i o n system i s written i n LISP-MTS (Wilcox and Hafner, 1976) and
reads the f i l e s from the Pascal procedures. LISP was chosen for the major
component of the implementation because of the ease of experimentation with
control structures and the s i m p l i c i t y of dynamic storage a l l o c a t i o n .
4.3 Data Structures
The c u r v i l i n e a r features of the DTM and the Landsat image are
represented i n the piecewise lin e a r approximation described i n section
3.1.5. They are structured as l i s t s when written to the feature f i l e s . A
curve i s represented as a 3 element l i s t , as follows:

61
( f i r s t - p o i n t l a st-point internal-structure )
where in t e r n a l structure i s a 5 element l i s t defined recursively as:
( l e f t - p o i n t right-point internal-structure between f i r s t - p o i n t and l e f t - p o i n t internal-structure between l e f t - p o i n t and right-point internal-structure between right-point and last-point )
or NIL when the perpendicular distance of a l l points between
• f i r s t - p o i n t and last-point i s l e s s than the d e t a i l l e v e l .
Points are represented as a l i s t of the two coordinates. At lower l e v e l s i n
the structure, internal-structure i s expanded using the endpoints of the
enclosing segment as the f i r s t - and last-point. For example the l i n e A-F i n
figure 17 i s represented i n the l i s t structure for a generalized curve as:
( A F ( B D NIL (C NIL NIL NIL NIL) (E NIL NIL NIL NIL)))
The dotted l i n e s i n figure 17 show the approximating segments for various
portions of the curve. Figure 17 also shows a tree representation of the
generalized curve. This representation can e a s i l y be converted into the
o r i g i n a l l i n e structure, a l i s t of points, by a pre-order traversal of the
tree.
Because i t i s necessary to search the area around a feature, a data
structure was added to the system which would succinctly represent s p a t i a l
r e l a t i o n s . A coarse mesh i s placed over the region i n the plane containing
the features. Each c e l l defined by t h i s mesh i s termed a bucket. On input,
the features are compared with t h i s mesh and the names of a l l features
passing through a given bucket are added to the l i s t of features i n the
bucket. When i t i s necessary to find a l l features within a certain distance
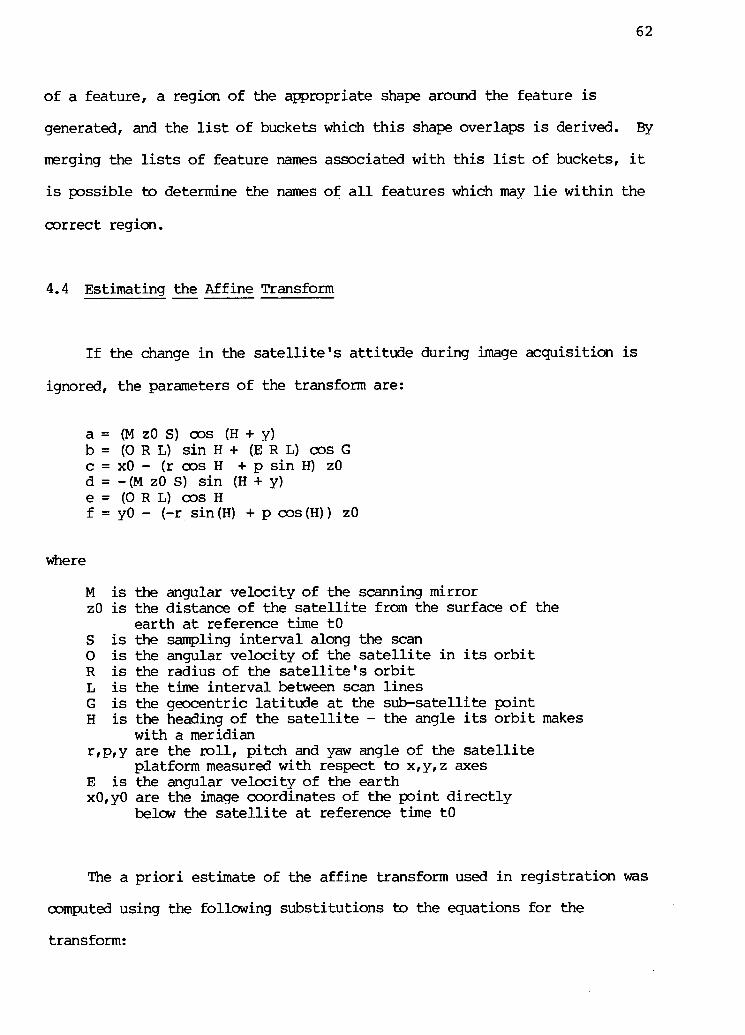
62
of a feature, a region of the appropriate shape around the feature is
generated, and the l i s t of buckets which this shape overlaps is derived. By
merging the li s t s of feature names associated with this l i s t of buckets, i t
is possible to determine the names of a l l features which may li e within the
correct region.
4.4 Estimating the Affine Transform
If the change in the satellite's attitude during image acquisition is
ignored, the parameters of the transform are:
a = (M zO S) oos (H + y) b = (0 R L) sin H + (E R L) cos G c = xO - (r cos H + p sin H) zO d = -(M zO S) sin (H + y) e = (0 R L) cos H f = yO - (-r sin(H) + p cos(H)) zO
where
M is the angular velocity of the scanning mirror zO is the distance of the satellite from the surface of the
earth at reference time tO S is the sampling interval along the scan 0 is the angular velocity of the satellite in its orbit R is the radius of the satellite's orbit L is the time interval between scan lines G is the geocentric latitude at the sub-satellite point H is the heading of the satellite - the angle its orbit makes
with a meridian r,p,y are the ro l l , pitch and yaw angle of the satellite
platform measured with respect to x,y, z axes E is the angular velocity of the earth xO,yO are the image coordinates of the point directly
below the satellite at reference time tO
The a priori estimate of the affine transform used in registration was
computed using the following substitutions to the equations for the
transform:

63
M =6.21 rad/sec zO = 900 kilometers (a more accurate altitude is contained in
the image annotation) S = 9.958e-6 sec 0 = 1.014e-3 rad/sec R =6370 kilometers L = 12.237e-3 sec G = 49 deg 35 min H = 0.246 rad rfp,y = 0,0,0 rad E = 72.722e-6 rad/sec x0,y0 =0,0
Using these parameters, the resulting affine transform is:
a = 0.539797 b = 0.236592 c = 0.0 d = -0.13550 e = 0.766666 f = 0.0
4.5 Examples of Registration and Results
The position of the sun for the September 14, 1976 image was determined
using a version of the method of (Horn, 1977) implemented by R.J. Woodham.
The sun's position so determined was azimuth 134.5 degrees, elevation 34.4
degrees. Figure 26 shows a synthetic image generated using the calculated
position of the sun. The DTM features selected using t h i s sun position are
depicted i n figure 27 . A l l of these ridge l i n e s are longer than 250
meters. The curves are generalized using a d e t a i l l e v e l of 80 meters.
For the Landsat image, the same length and generalization parameters
were used. The top 20 percent of the feature c e l l s were used i n the
construction of the 1-edges. The position of the sun was input as we l l , so
that shadow edges could be rejected.

64
Figure 26 Svnthetic imaqe for September 14, 1976. Sun fs position i s Izimuth 134.59degreeSl elevation 34.4 degrees. The white tox outlines theWlon of the M i n feature selection. Photographed from the screen of the CCMTAL Vision 1.


66
In the test case, the location of the Landsat image i n the DTM was
estimated by hand to within 0.75 kilometers, or approximately 10 p i x e l s .
This reduced the search region size so as to reduce the expense i n
developing the system. The a f f i n e transform for t h i s image was determined
to be:
a = 0.555292 b = 0.131612 c = 1.944259 d =-0.143495 e = 0.7736 12 f = 2.197464
The errors associated with a transformation are determined by comparing the
positions of transformed Landsat points with the positions of the
corresponding DTM points. The point pairs are derived from the features
which overlap using the transformation being evaluated. The r e g i s t r a t i o n
determined from the matching found by the system resulted i n the following
errors:
Average error = 30.9 meters or 0.3862 pi x e l s Root mean square error = 53.5 meters or 0.66875 p i x e l s
Figures 27 and 28 show the DTM and Landsat features with the matched points.
There are 33 ridges and 18 l-edges i n t h i s example. Twenty-five matchings
(three pairings each) were examined before a matching was accepted. Of
these matchings, 14 produced transforms which were self-consistent. The
remaining were rejected on the grounds of the inconsistency of the
transform. Two of the s i x pairings i n t h i s matching are at junctions
between features i n the DTM.
A second image of the same region (figure 29) obtained January 8, 1979,
(frame ID 30309-17575), was registered. The a p r i o r i estimate of the a f f i n e
transform used for t h i s case was the same as that used for the f i r s t image.
The position of the sun for t h i s image was calculated as above to be azimuth

67
\
Figure 28 Features from Landsat image, September 14, 1976, with matched points (1-6).

68
Figure 29 100 x 100 pixel subsection of Landsat imaqe (band 7) from January 8r 1979, frame ID 30309-17575. Photographed from the screen of the COMTAL Vision 1.
69
153.1 degrees, elevation 13.8 degrees. Many of the ridges selected from the
DTM using surface orientation alone were i n shadow. The portion of the
t e r r a i n i n shadow can be detected by using a standard 'hidden-surface'
algorithm (Woodham, 1980) i n which the viewing point i s located at the
position of the l i g h t source. The portion of the surface which i s i n v i s i b l e
to an observer thus situated i s i n shadow. Any part of a ridge which i s i n
shadow i s 'clipped' to the boundaries of the shadow. Shadow calculation was
not implemented for feature selection. Instead, the program of R.J. Woodham
for producing synthetic images (figure 30) was used to determine the
locations of regions i n shadow. Features l y i n g i n those regions were
removed manually.
The affine transform for the January 8, 1979 image was determined to
be:
a = 0.537147 b = 0.150337 c = 1.620489 d =-0.132218 e = 0.694722 f = 2.330885
The error terms were:
Average error = 38.5 meters or 0.48125 p i x e l s Root mean square error = 56.9 meters or 0.71125 p i x e l s
Figures 31 and 32 show the DTM and Landsat features with the matched points
indicated. There are 15 ridges and 22 l-edges. In t h i s example, the f i r s t
matching developed yielded t h i s good set of matches with an acceptable
error. Four of the seven pairings i n t h i s matching occur at ridge
junctions. Figure 33 shows the registered Landsat image.

Figure 30 Synthetic image f o r January 8t 1979. Sun's position i s azimuth 153.1 degrees, elevation 13.8 degrees. The white box o u t l i n e s the portion of the DTM used i n feature s e l e c t i o n . Photographed from the screen of the COMT7AL V i s i o n 1.

71

72

Figure 33 Registered Landsat image section for January 8, 1979. The white square outlines the 10 kilometer area' covered by the DTM. Pnotographed from the screen of the COMTAL Vision 1.

74
5. Discussion and Conclusions
5.1 Discussion
The results of the tests indicate that feature matching can be an
eff e c t i v e procedure for registering images. Registration errors for the
examples are we l l within accepted standards. The automatic re g i s t r a t i o n
procedure presented r e l i e s upon the existence of a detailed t e r r a i n model
for i t s use. Currently, such DTM's are not generally available. However,
i n Canada, the Department of Energy, Mines and Resources i s committed to
production of such DTM's for most of Canada. I t has been shown (Woodham,
1980) that r e g i s t r a t i o n of an image to a d i g i t a l t e r r a i n model i s help f u l i n
determining shading effects which af f e c t image analysis. Benefits such as
t h i s can sometimes j u s t i f y manual generation of a DTM for a p a r t i c u l a r study
area.
Insofar as the method i s based upon determining t e r r a i n features which
w i l l appear d i s t i n c t l y i n an image, the method i s r e s t r i c t e d to application
i n areas of mountainous t e r r a i n . There i s l i t t l e p o s s i b i l i t y that the
method as i t stands would be useful i n registering images of p r a i r i e land.
The benefits of registering an image to a DTM i n such a situ a t i o n are
minimal also. Nevertheless, the p r i n c i p l e of using known illumination
conditions and a scene model can find a p p l i c a b i l i t y elsewhere. The features
selected can be water-land boundaries, roads and other d i s t i n c t i v e scene
elements. The application to DTM's and Landsat images i s p a r t i c u l a r l y
appealing since the imaging geometry i s simple. There i s no need to solve
hidden surface problems. Funt (1980) has proposed using synthetic images i n

75
interpreting indoor scenes. Features extracted from any scene model
containing information on surface orientation and position can be used with
the method presented.
The representation of curves by generalization s i m p l i f i e s the process
of analysing the relations between curves. By matching portions of curves
to each other i n varying positions, d i s t i n c t i v e matchings are determined.
Although the notion of representing a curve by i t s band has existed for some
time, i t s use i n curve matching i s new i n t h i s application. By permitting
looser matching between curves and segments of curves, the band
representation f a c i l i t a t e s curve matching.
Determining l o c a l support for a match appears to disambiguate f a l s e
matches readily. In images of mountainous t e r r a i n , i t i s u n l i k e l y that
l o c a l support w i l l be i n s u f f i c i e n t for detecting correct matches. However,
i n scenes of urban landscapes, or i n i n d u s t r i a l applications, r e g u l a r i t y i s
i n t r i n s i c . Local support w i l l be very necessary i n distinguishing f a l s e and
true matches. In addition, these situations w i l l require more careful
selection of d i s t i n c t subsets of matching features. The representations for
curves advanced i n t h i s thesis i s advantageous for such feature selection.
D i f f i c u l t i e s with the method w i l l occur i n areas of low r e l i e f or
strongly regular t e r r a i n , what geomorphologists c a l l "strongly controlled"
t e r r a i n . Clouds, depending upon the sun's position, can be problematic.
The boundaries of shadows of clouds w i l l appear i n images as strong
brightness di s c o n t u i t i e s and w i l l not be discriminated from the images of
ridges. Clouds themselves w i l l generate brightness d i s c o n t i n u i t i e s . The
method may prove i t s e l f robust enough to meet t h i s challenge.

76
5.2 Further Work
The handling of curve matching where both curves are structured was
eliminated i n t h i s implementation of the regi s t r a t i o n method. By
subdividing l-edges into simple segments, some of the power of the
representation i s l o s t . The junctions at which the 1-edge segments meet are
then unavailable. However, the implementation i s s i m p l i f i e d . By including
a f a c i l i t y for manipulating and assessing structured-to-structured feature
matching a s i g n i f i c a n t improvement oould be made. Davis (1979) has
developed one such method.
The control of matching development i s very simple. All
translation-consistent t r i p l e s are examined for self-consistency. I f a
matching i s self-consistent with respect to i t s derived transformation, the
transform i s used to predict the location of image features i n the DTM. The
re s u l t of t h i s test of the transform i s binary: either accept or f a i l . When
a set of predicted 1-edge to ridge overlaps i s generated, the s t r u c t u r a l
relations between the overlapping l-edges and ridges could be used to guide
further adjustment of the parent matching. This upward flow of information
i s very important i n image analysis i n general.
5.3 Conclusions
This work demonstrates the effectiveness of matching features derived
from d i g i t a l t e r r a i n models with image features for solving the r e g i s t r a t i o n
problem. I t i s hoped that the techniques presented here and the p r i n c i p l e s
underlying them can find application elsewhere.

77
Bibliography
Agin, G.J., "Computer Vision Systems for I n d u s t r i a l Inspection and Assembly", Computer 13, 5(May, 1980), 11-20.
Aho, A.V., Hopcroft, J.E. and J.D. Ullman,The Design and Analysis of Computer Algorithms, Addison-Wesley, Reading, Ma., 1974.
Ambler, A.P. and R.S. Popplestone, "Inferring the positions of bodies from specified s p a t i a l relationships", A r t i f i c i a l Intelligence, 6, 2 (1795), 157-174.
Bajcsy, R. and P. Chance, "Picture recognition applications i n biochemistry", Technical Report, University of Pennsylvania, Moore
'• School of E l e c t r i c a l Engineering, (May, 1975).
Bajcsy, R., and M. Tavakoli, "Computer recognition of roads from s a t e l l i t e pictures", International Joint Conference for Pattern Recognition, (1976).
Ballard, D.H., CM. Brown and J.A. Feldman, "An Approach to Knowledge-Directed Image Analysis", International J o i n t Conference on A r t i f i c i a l Intelligence, (1979).
Ballard, D.H. " S t r i p Trees: A Hierarchical Representation for Map Features", Proceedings of IEEE Computer Society Conference on Pattern Recognition and Image Processing, Chicago, I l l i n o i s , August 1979, 278-285.
Barnea, D.T. and H. Silverman,"A Class of Algorithms for Fast D i g i t a l Image Registration", IEEE Transactions on Computers, C-21, 179, (1972).
Barrow, H.G. and R.M. B u r s t a l l , "Subgraph Isomorphism, Matching Relational Structures and Maximal Cliques", Information Processing Letters, 4, 4, (Jan. 1976), 83-84.
Barrow, H.G. and R.S. Popplestone, "Relational descriptions i n picture processing", i n Machine Intelligence 6, Meltzer, B., Michie, D. (Eds.), 377-396.
Barrow, H.G., Tenenbaum, J.M., Bolles, R.C. and H.C. Wolf, "Parametric Correspondence and Chamfer Matching: Two New Techniques for Image Matching", Technical Note 153, SRI International, Menlo Park, C a l i f o r n i a .
Bernstein, R. " D i g i t a l Image Processing of Earth Observation Sensor Data", IBM Journal of Research and Development, (Jan. 1976), 40-57.
Bolles, R.C, "Robust feature matching through maximal cliques", Proceedings of Society of Photo-optical Instrumentation Engineers, 182 Imaging Applications for Automated In d u s t r i a l Inspection and Assembly, (1979), 140-149.
78
Bolles, R.C. et a l . , "Automatic Determination of Image-to-Database Correspondences", International J o i n t Conference on A r t i f i c i a l Intelligence, (1979).
Davis, L.S. "Shape Matching Using Relaxation Techniques". IEEE Transactions on Pattern Analysis and Machine Intelligence, 1,1 (Jan. 1979), 60-72.
Davis, L.S. "A Survey of Edge Detection Techniques", Computer Graphics and Image Processing 14, 3 (1975), 248-270.
Davis, W.A. and S.K. Kenue, "On the Detection of Changes i n D i g i t a l Images", Computer Science Technical Report, University of Alberta, Edmonton, (Sept. 1977).
Fi s c h l e r , M.A. and R.A. Elschlager, "The Representation and Matching of P i c t o r i a l Structures", IEEE Transactions on Computers, C-22, 1, (Jan. 1973), 67-92.
Fowler, R.J. and J . J . L i t t l e , "Automatic Extraction of Irregular Network D i g i t a l Terrain Models", Proceedings of SIGGRAPH-79, Chicago, I l l i n o i s , (Aug. 1979), 199-207.
Funt, B.V. "Towards Synthetic Images i n Scene Analysis", Proceedings of the CSCSI/SCEIO Conference, V i c t o r i a , B.C., (1980), 158-165.
Horn, B.K.P., "The Position of the Sun", MIT A l Lab Working Paper 162.
Horn, B.K.P. and B.L. Bachman, "Using Synthetic Images to Register Real Images with Surface Models", Comm. ACM 21, 11 (Nov. 1978), 914-924.
Horn, B.K.P. and R.J. Woodham, "Landsat MSS Coordinate Transformations", Proceedings of the F i f t h Annual Symposium on Machine Processing of Remotely Sensed Data, Purdue University, 1979.
Hsieh, Y.Y. and K.S. Fu, "A Method for Automatic IC Chip Alignment and Wire Bonding", Proceedings of the IEEE Computer Society Conference on Pattern Recognition and Image Processing, Chicago, I l l i n o i s , (August 1979), 101-108.
Iannino, A. and S. Shapiro, "An Iterat i v e Generalization of the Sobel Edge Detection Operator", Proceedings of the IEEE Computer Society Conference on Pattern Recognition and Image Processing, Chicago, I l l i n o i s , (August, 1979), 130-137.
I t a i , A., Rodeh, M. and S.L. Tanimoto, "Some matching problems for b i p a r t i t e graphs", Journal of the Association for Computing Machinery 25, 4 (Oct. 1978), 517-525.
J o l l i f e , B. and B.W. Pollack, "UBC PASCAL, PASCAL/CJBC Programmer's Guide",Computer Center, University of B r i t i s h Columbia, (Sept. 1979).
Kaneko, T., "Evaluation of LANDSAT Image Registration Accuracy", Photogrammetric Engineering and Remote Sensing XLIII, 1976, 1285-1299.

79
Myers, W., "Industry Begins to Use V i s u a l Pattern Recognition", Computer 13, 5 (May, 1980), 21-31.
Nevatia, R. and K.R. Babu, "Linear Feature Extraction and Description", International J o i n t Conference on A r t i f i c i a l Intelligence, (August,1979).
P a v l i d i s , T.,Structural Pattern Recognition, Springer-Verlag, New York, 1977.
Peucker, T.K. and D.H. Douglas, "Detection of surface-specific points by l o c a l p a r a l l e l processig of discrete t e r r a i n elevation data", Computer Graphic and Image Processing 4, (1975), 375-387.
Peucker, T.K., R.J. Fowler, J . J . L i t t l e , and D.M. Mark, "The Triangulated Irregular Network", Proc. of the D i g i t a l Terrain Models Symposium, May 9-11, 1978.
Ramer, U. "An i t e r a t i v e procedure for the polygonal approximation of planar curves". Computer Graphics and Image Processing 1,3 (1972).
Sutherland, I.E., Sproull, R.F. and R.A. Schumaker, "A Characterization of Ten Hidden-Surface Algorithms", Computing Surveys 6, 1 (March 1974), 1-55.
Tanimoto, S.L. "Analysis of biomedical images using maximal matching", Proceedings of 1976 IEEE Conference on Decision and Control Adaptive Processes, Clearwater Beach, F l a . , (Dec. 1976), 171-176.
Toriwaki, J . and T. Fukumaru, "Extraction of Structural Information from Grey Pictures", Computer Graphics and Image Processing 7, (1978), 30-51.
Wilcox, B. and C. Hafner,"LISP/MTS User's Guide", Department of Computer Science, University of B r i t i s h Columbia, (July, 1976).
Woodham, R.J. "Using D i g i t a l Terrain Data to Model Image Formation i n Remote Sensing", Proc. Soc. Photo-Optical Instrumentation Engineers, Vol. 238, Bellingham, Wa., (July, 1980).

















