
APPLICAZIONI LINEARI dell’AMPLIFICATORE … · matiche dei logaritmi, i circuiti moltiplicatori e...
45
1 APPLICAZIONI LINEARI dell’AMPLIFICATORE OPERAZIONALE di Antonio Palladino
Transcript of APPLICAZIONI LINEARI dell’AMPLIFICATORE … · matiche dei logaritmi, i circuiti moltiplicatori e...

1
APPLICAZIONI LINEARI dell’AMPLIFICATORE
OPERAZIONALE
di
Antonio Palladino

2
Sommario Generale
• Amplificatore Operazionale Ideale pag. 1 • Configurazione Invertente pag. 4 • Configurazione Non Invertente pag. 6 • Inseguitore di Tensione pag. 8 • Sommatore Invertente pag. 9 • Sottrattore pag. 11 • Derivatore Invertente Ideale pag. 14 • Derivatore Invertente Attivo pag. 18 • Integratore Invertente Ideale pag. 21 • Integratore Invertente Attivo pag. 24 • Amplificatore Logaritmico e Antilogaritmico pag. 27 • Circuito Moltiplicatore pag. 29 • Circuito Divisore pag. 30 • Codifica PCM pag. 31 • Campionamento pag. 32 • Circuito Sample & Hold pag. 33 • Trasformata di Laplace pag. 35 • Risoluzione di un’equazione differenziale pag. 37 • Logaritmi pag. 39 • Programmi Matlab pag. 41 • Bibliografia pag. 42

1
Premessa
Nel seguente lavoro vengono presentate le principali applica-
zioni dell’Amplificatore Operazionale; dopo un’introduzione ri-
guardante le caratteristiche dell’Amplificatore operazionale i-
deale, sono illustrati i circuiti statici (senza condensatori): la
configurazione invertente, la configurazione non invertente, il
sommatore ed il sottrattore. Successivamente sono stati ana-
lizzati i circuiti dinamici (con i condensatori): il derivatore idea-
le ed attivo, l’integratore ideale ed attivo. Nella trattazione di
questi 4 circuiti si è fatto riferimento ai diagrammi di Bode, alla
trasformazione di Laplace, alla risoluzione dell’equazioni diffe-
renziali.
In seguito sono stati analizzati l’amplificatore logaritmico e an-
tilogaritmico, e, facendo riferimento alle note proprietà mate-
matiche dei logaritmi, i circuiti moltiplicatori e divisori.
L’ultimo argomento affrontato è stato il circuito Sample & Hold;
la trattazione è stata inserita nella tematica più vasta della co-
difica PCM e del campionamento.

1
AMPLIFICATORE OPERAZIONALE IDEALE
L’Amplificatore operazionale è uno dei componenti più usati dell’elettronica
attuale, sia nel campo lineare che in quello non lineare.
È reperibile in commercio come circuito integrato monolitico (cioè è un in-
sieme di componenti elettronici lineari e non, realizzati su di un unico chip di
silicio), di costo molto basso. In questo paragrafo si esamina l’amplificatore
operazionale ideale ( le cui caratteristiche non si discostano molto da quelle
del componente reale, reperibile in commercio), in quanto, per comprendere
il funzionamento della quasi totalità delle amplificazioni, risulta sufficiente
l’immagine teorica del componente.
Le caratteristiche dell’amplificatore operazionale ideale sono:
• Resistenza d’ingresso infinita
• Guadagno in catena aperto infinito
• Resistenza d’uscita nulla
• Banda passante infinita
• Tensione d’uscita nulla con tensione d’ingresso nulla.
In figura A è indicato il simbolo dell’amplificatore operazionale, in figura B
appaiono i collegamenti con alimentazione e riferimento di massa e in figura
C è riportato il circuito dinamico.
fig. A
Simbolo dell’amplificatore operazio-
nale
fig. B
Sistema di doppia alimentazione per un amplificatore
operazionale

2
Negli schemi che seguiranno, per semplicità grafica, si ometteranno i termi-
nali di alimentazione, simmetrici rispetto al riferimento di massa.
fig. C
Circuito equivalente semplificato di un amplificatore operazionale.
Ri = resistenza d’ingresso; Rout =resistenza d’uscita; A * Vi = generatore ideale di tensione.
Nelle figure A, B e C sono indicati gli ingressi di segnale e il segno che vi ap-
pare indica rispettivamente l’ingresso invertente (segno -) e quello non in-
vertente (segno +).
Il significato di tale distinzione è il seguente:
• Se si applica un segnale all’ingresso invertente, mentre quello non inver-
tente è collegato a massa, l’uscita amplificata avrà fase opposta a quella
del segnale d’ingresso.
• Se si applica un segnale all’ingresso non invertente, mentre quello inver-
tente è collegato a massa, l’uscita amplificata avrà fase uguale a quella
del segnale d’ingresso.
Le enunciazioni precedenti consentono di trarre alcune importanti conse-
guenze:
• Se ai due ingressi vengono simultaneamente applicati segnali uguali, in
fase di uscita si ottiene un segnale nullo (Ampl. Op. ideale).
• Più in generale, si deduce che il dispositivo amplifica la differenza tra i
due segnali d’ingresso.
È interessante osservare che questa proprietà rende possibile l’eliminazione,
nel dispositivo, degli eventuali disturbi di rete presenti nel sistema di alimen-

3
tazione, perché appaiono simultaneamente ed in fase ai due ingressi, ed
hanno, quindi, effetto nullo sull’uscita.

4
CONFIGURAZIONE INVERTENTE
Per calcolare il guadagno, applichiamo il 1° Principio di Kirchhoff al nodo A e
si ha:
fes iii +=
ma poiché l’amplificatore operazionale assorbe correnti piccolissime, ie si può
trascurare, quindi
fs ii = .
Applicando il 2° Principio di Kirchhoff alla maglia d’ingresso in senso orario,
si ha:
0=+⋅− isss ViRV
Applicando lo stesso principio alla maglia di uscita in senso antiorario, si ha:
0=+⋅+ iffo ViRV
Poiché Vi è circa uguale a 0, si ottengono le due espressioni:
0=⋅− sss iRV
0=⋅+ ffo iRV
Da queste si ha:
SiS iRV ⋅=
VS

5
ffO iRV ⋅−=
Dividendo membro a membro si ottiene il guadagno:
ss
ff
s
ovf iR
iR
V
VA
⋅⋅−
==
Essendo uguali is e if, si ha che:
s
fvf R
RA −=
La RESISTENZA D’INGRESSO è uguale alla rapporto tra tensione ingresso e
corrente d’ingresso:
ss
ss
s
sif R
i
iR
i
vR =⋅==
Si può dimostrare che la RESISTENZA DI USCITA tende a 0:
Rof —> 0.
La resistenza Ro di uscita dell’amplificatore operazionale ad anello aperto
tende a zero (nella realtà è poche decine di Ohm). Applicando la retroazione
con Rf, la resistenza d’uscita si riduce ancora di più e quindi a maggior ra-
gione Rof —> 0.
NOTA. Si è detto che vi = 0; ma vi = VB – VA;
quindi si ha VB – VA = 0 => VA = VB .
I due nodi A e B hanno lo stesso potenziale. Ora B è a massa, quindi VB = 0.
Sarà allora anche VA = VB = 0. Il morsetto A, pur non essendo fisicamente
collegato a massa, è come se lo fosse, avendo potenziale nullo. Si dice che A
è a Massa Virtuale.
6
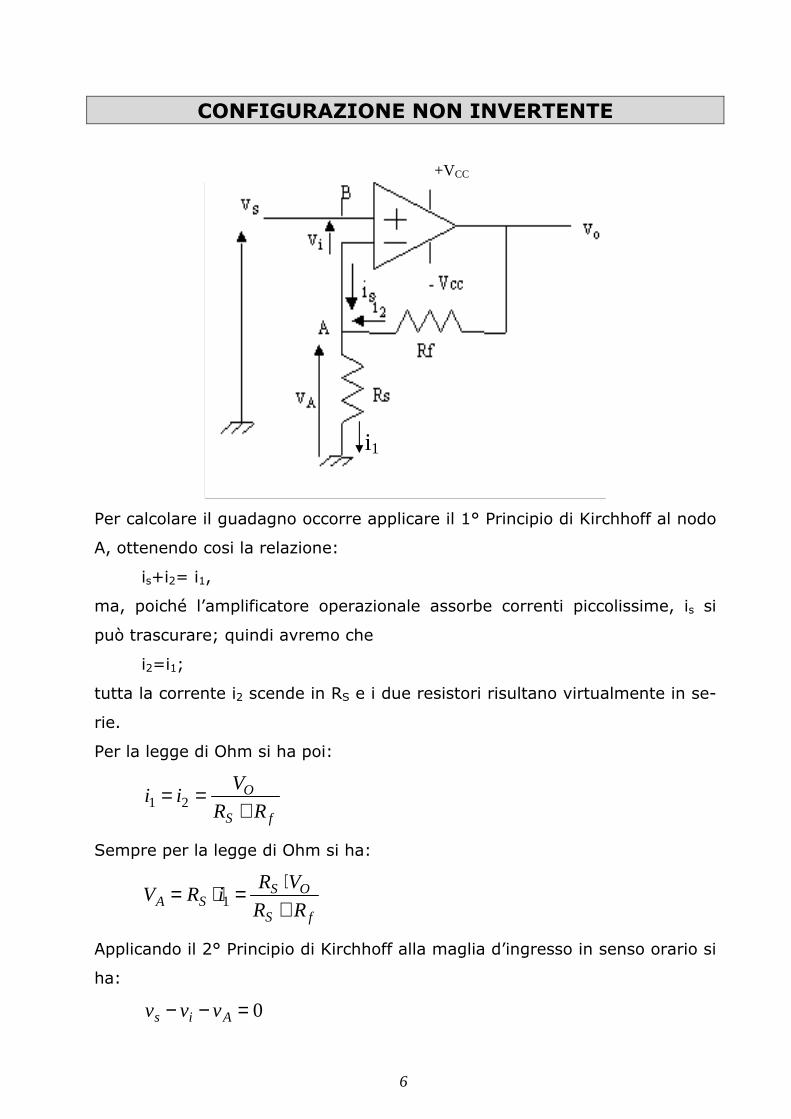
CONFIGURAZIONE NON INVERTENTE
Per calcolare il guadagno occorre applicare il 1° Principio di Kirchhoff al nodo
A, ottenendo cosi la relazione:
is+i2= i1,
ma, poiché l’amplificatore operazionale assorbe correnti piccolissime, is si
può trascurare; quindi avremo che
i2=i1;
tutta la corrente i2 scende in RS e i due resistori risultano virtualmente in se-
rie.
Per la legge di Ohm si ha poi:
fS
O
RR
Vii
+== 21
Sempre per la legge di Ohm si ha:
fS
OSSA RR
VRiRV
+⋅=⋅= 1
Applicando il 2° Principio di Kirchhoff alla maglia d’ingresso in senso orario si
ha:
0=−− Ais vvv
+VCC
i1

7
e poiché per un amplificatore operazionale lineare risulta Vi circa uguale a 0,
si ha
0=− As vv
da cui:
As vv =
Il guadagno Avf sarà uguale a:
s
f
s
fs
fs
so
fs
s
o
A
o
s
Ovf R
R
R
RR
RR
RV
RR
RV
V
V
V
VA +=
+=
+
=⋅
+
=== 11
Come si può facilmente osservare, il guadagno risulta sempre positivo e
maggiore o al limite, uguale ad uno.
Si può dimostrare che la RESISTENZA D’INGRESSO tende ad infinito. La re-
sistenza d’ingresso Ri dell’amplificatore operazionale ad anello aperto tende
all’infinito. Si dimostra poi che, a causa della retroazione negativa, con la
configurazione non invertente il valore Rif diviene ancora più elevato.
Rif > Ri .
Si può, inoltre, dimostrare che la RESISTENZA DI USCITA tende, invece, a
0;
Rof —> 0.
La resistenza Ro di uscita dall’amplificatore operazionale ad anello aperto
tende a 0 (nella realtà è poche decine di Ohm). Applicando la retroazione
negativa con Rf, la resistenza d’uscita si riduce ancora di più e quindi, a
maggior ragione, risulta Rof —> 0 .
NOTA. Nella configurazione non invertente non c’è la massa virtuale. È vero
che i due morsetti A e B hanno lo stesso potenziale, ma nessuno di essi è
collegato a massa.

8
INSEGUITORE DI TENSIONE
L’inseguitore di tensione è un circuito molto usato in Elettronica. Esso si può
ottenere come caso particolare della configurazione non invertente.
Se infatti nella configurazione non invertente consideriamo pari a zero il re-
sistore Rf di retroazione (sostituendolo con un corto circuito) e paria ad infi-
nito il resistore Rs che collega il morsetto positivo alla massa (sostituendolo
con un circuito aperto, cioè eliminandolo completamente), si otterrà proprio
il circuito sopra indicato.
Vediamo allora quale sarà il guadagno di tale circuito:
1010
11 =+=∞→
→+=+==
s
f
s
f
s
Ovf R
R
R
R
V
VA
Se il guadagno è unitario, vorrà dire che l’uscita sarà perfettamente uguale
all’ingresso, ovvero, l’uscita insegue l’ingresso.
Ricordiamo inoltre che, trattandosi di una configurazione non invertente, la
RESISTENZA D’INGRESSO tende ad infinito e la RESISTENZA DI USCITA
tende, invece, a 0; queste caratteristiche rendono questo circuito adatto in
tutte quelle situazioni nelle quali è necessario accoppiare elettricamente due
circuiti senza che si creino effetti di carico.
+VCC
-VCC
9
•
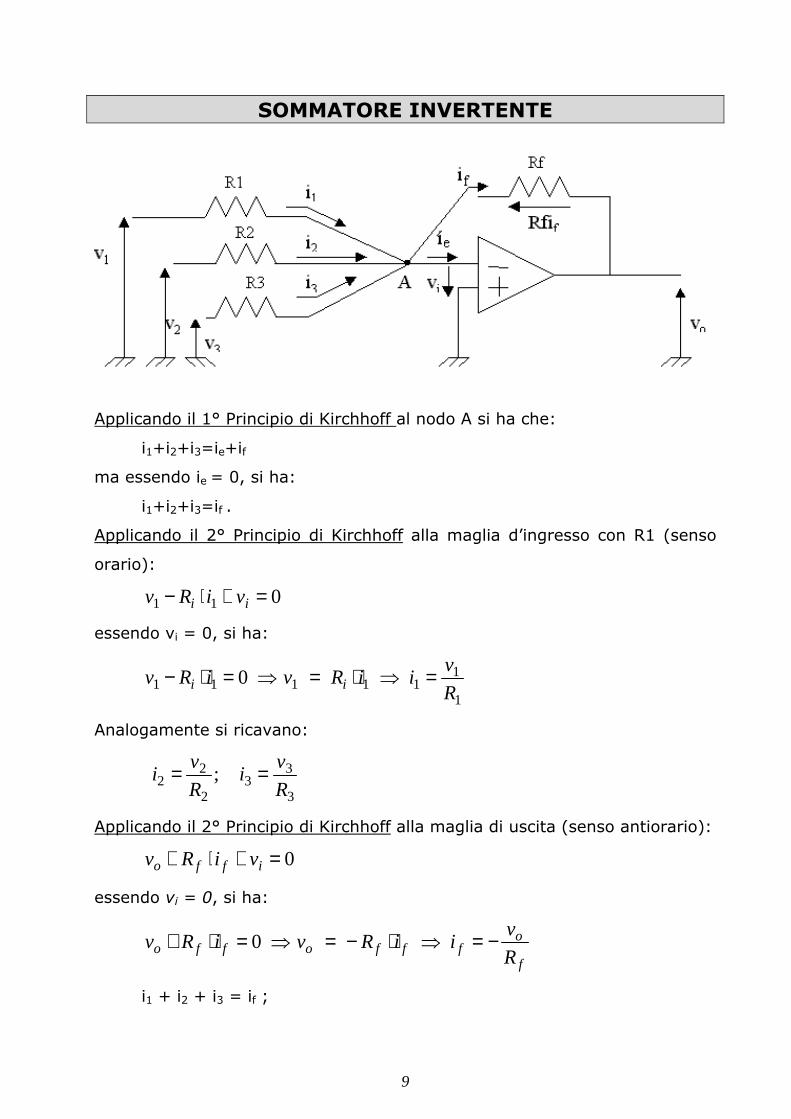
SOMMATORE INVERTENTE
Applicando il 1° Principio di Kirchhoff al nodo A si ha che:
i1+i2+i3=ie+if
ma essendo ie = 0, si ha:
i1+i2+i3=if .
Applicando il 2° Principio di Kirchhoff alla maglia d’ingresso con R1 (senso
orario):
011 =+⋅− ii viRv
essendo vi = 0, si ha:
1
111111 0
R
viiRviRv ii =⇒⋅=⇒=⋅−
Analogamente si ricavano:
3
33
2
22 ;
R
vi
R
vi ==
Applicando il 2° Principio di Kirchhoff alla maglia di uscita (senso antiorario):
0=+⋅+ iffo viRv
essendo vi = 0, si ha:
f
offfoffo R
viiRviRv −=⇒⋅−=⇒=⋅+ 0
i1 + i2 + i3 = if ;

10
Ora sostituendo nella relazione iniziale i1 + i2 + i3 = if le espressioni trovate ,
si ha:
⋅+⋅+⋅−=
++⋅−=
⇔−=++
33
22
113
3
2
2
1
1
3
3
2
2
1
1
vR
Rv
R
Rv
R
R
R
v
R
v
R
vRv
R
v
R
v
R
v
R
v
ffffo
f
o
Questo è il legame ingressi – uscita.
Per ognuno dei morsetti d’ingresso è definita una resistenza d’ingresso.
La resistenza d’ingresso del 1° morsetto è uguale al rapporto tra la tensione
d’ingresso del 1° morsetto e la corrente d’ingresso del 1° morsetto:
11
11
1
11 R
i
iR
i
vRif =⋅==
Analogamente Rif2 = R2 ; Rif3 = R3 .
È importante sottolineare che anche in questo caso, come nella configura-
zione invertente, il morsetto A è a massa virtuale.

11
SOTTRATTORE
Ricaviamo il legame ingresso-uscita (I/O). Poiché il circuito è lineare, ed ha
due ingressi, si può applicare il principio di sovrapposizione degli effetti.
1° ingresso: v1 presente, v2 assente (v1‡0 ; v2=0)
Dobbiamo trovare vo' in funzione di v1'. Come si vede, tra vo' e v1' c’è una
configurazione non invertente:
13
4
3
4
1
11 vR
Rv
R
RA
v
vovf
o ′⋅
+=′⇒+==
′′
ora occorre ricavare il legame tra v1 e v1' :
l’Amplificatore Operazionale (A.O.) non assorbe corrente, pertanto la corren-
te i, da R1 scende tutta in R2.
Per la legge di Ohm si ha:

12
21
1
RR
vi
+=
sempre per la legge di Ohm si ha
21
1121 RR
vRiRv
+⋅=⋅=′
(tale relazione si può anche ricavare mediante il partitore di tensione).
Infine:
121
2
3
41
3
4 11 vRR
R
R
Rv
R
Rvo ⋅
+⋅
+=′⋅
+=′
2° ingresso: v1 assente; v2 presente (v1=0 ; v2‡0).
schema 1 schema 2
Ora dobbiamo trovare vo" in funzione di v2. Come si può notare, abbiamo
capovolto lo schema 1 ed abbiamo ottenuto lo schema 2; sembra quasi una
configurazione invertente.
Osserviamo che l’A.O. non assorbe corrente, quindi all’interno di R1 e R2
non passa corrente. Basandoci sulla legge di Ohm:
( ) 0// 21 =⋅= iRRvA
Il morsetto A è a potenziale nullo, quindi è praticamente a massa. Possiamo
allora affermare di essere di fronte ad una configurazione invertente:

13
23
4
3
4
2
vR
Rv
R
RA
v
vovf
o ⋅−=′′⇒−==′′
La vo generale è data dalla somma delle due uscite:
ooo vvv ′′+′=
23
41
21
2
3
41 vR
Rv
RR
R
R
Rvo ⋅−⋅
+⋅
+=′

14
DERIVATORE INVERTENTE IDEALE
Analisi nel dominio del Tempo
Applicando il 1° Principio di Kirchhoff al nodo d’ingresso si ha:
is = if + ie ; ie= 0 => is = if .
Applicando il 2° Principio di Kirchhoff sulla maglia d’ingresso si ha:
vs – vc + vi = 0 ; vi= 0 => vs = vc .
Applicando il 2° Principio di Kirchhoff sulla maglia d’uscita avremo che:
vo + R2·if + vi = 0 ; vi= 0 => vo = -R2 • if
Per il condensatore vale la relazione costitutiva dt
dvCi c
s ⋅= 1 ;
essendo vs = vc si ha: dt
dvCi s
s ⋅= 1
la tensione d’uscita sarà quindi: dt
dvCRiRiRv s
sfo ⋅⋅−=⋅−=⋅−= 1222 ;
quindi la relazione ingresso–uscita è la seguente:
dt
dvCRv s
o ⋅−= 12
e come si può notare l’uscita è uguale alla derivata dell’ingresso moltiplicata
per una costante negativa.
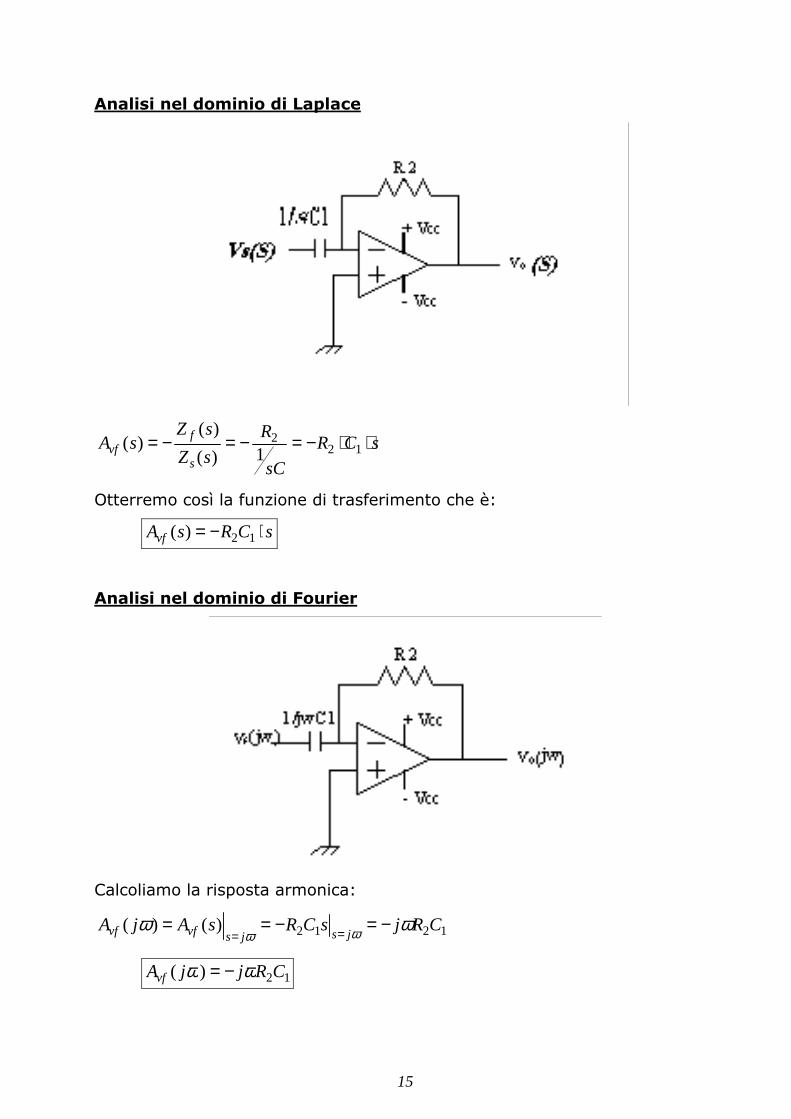
15
Analisi nel dominio di Laplace
sCR
sC
R
sZ
sZsA
s
fvf ⋅⋅−=−=−= 12
2
1)(
)()(
Otterremo così la funzione di trasferimento che è:
sCRsAvf ⋅−= 12)(
Analisi nel dominio di Fourier
Calcoliamo la risposta armonica:
1212)()( CRjsCRsAjAjsjsvfvf ωω ωω
−=−== ==
12)( CRjjAvf ωω −=

16
Diagrammi di Bode
La funzione di trasferimento presenta uno zero nell’origine.
Inconvenienti del derivatore invertente ideale
Il derivatore invertente ideale ha l’inconveniente di amplificare eccessiva-
mente i disturbi in alta frequenza che accompagnano ogni segnale elettrico.
Vediamo perché: un qualsiasi segnale è sempre accompagnato da disturbi in
bassa frequenza e in alta frequenza. Sia vs(t) il segnale totale che vogliamo
derivare: esso si può quindi scomporre nella somma del segnale utile vu(t)
AAF
AU
ABF

17
con il disturbo ad alta frequenza vDAF(t) e con il disturbo a bassa frequenza
vDBF(t) .Quando il segnale viene derivato, oltre alla parte utile vengono deri-
vati anche i disturbi. Ora il disturbo a bassa frequenza è derivato con
un’amplificazione ABF, inferiore a quella AU con cui viene derivato il segnale
utile, e ciò è vantaggioso. Invece, il disturbo in alta frequenza subisce
un’amplificazione AAF superiore a quella del segnale utile: AAF>AU. Quindi,
con questo tipo di derivatore, la quota di disturbo in alta frequenza rispetto
al segnale utile viene ad aumentare notevolmente nel passaggio
dall’ingresso all’uscita.

18
DERIVATORE INVERTENTE ATTIVO
Analisi nel dominio del tempo
Allo scopo di semplificare la trattazione, non eseguiremo direttamente
l’analisi del circuito nel dominio del tempo, ma ricaveremo il legame ingres-
so-uscita eseguendo la Antitrasformata di Laplace della funzione di trasferi-
mento.
Analisi nel dominio di Laplace
111)(
)()(
11
12
1
11
2
11
2
+−=+−=
+−=−=
CsR
CsR
sC
CsRR
sCR
R
sZ
sZsA
s
fvf
Moltiplicando e dividendo per R1, si ha:
111)(
)()(
11
11
1
2
11
12
1
1
+⋅−=
+⋅−=
+⋅−=−=
ττ
s
sA
CsR
CsR
R
R
CsR
CsR
R
R
sZ
sZsA
s
fvf
dove si è posto:
A pari al guadagno della configurazione invertente (-R2/R1);
ττττ pari alla costante di tempo R1C1 del circuito.
La funzione di trasferimento è quindi:
1)(
+⋅−=
ττ
s
sAsAvf

19
Analisi nel dominio del tempo
Sapendo che la f.d.t. è uguale al rapporto tra la trasformata di Laplace
dell’uscita e la trasformata di Laplace dell’ingresso, si ha:
soo
so
sso
s
ovf
sVAVsV
sVAVss
sVA
s
sVAV
s
sA
V
VA
⋅⋅−=+⋅⋅⋅−=⋅+
+⋅⋅−=
+⋅⋅−=
+⋅−==
ττττ
ττ
ττ
ττ
)1(11
1
dividendo tutto per la costante di tempo t si ha:
soo sVAVsV ⋅−=+τ1
eseguendo la Antitrasformata di Laplace si ha infine l’equazione differenziale
che descrive il circuito:
dt
dvAv
dt
dv so
o −=+τ1
Analisi nel dominio di Fourier
ωτωτ
ωωω
ωω j
jA
CRj
CRj
R
R
CsR
CsR
R
RsAjA
jsjsvfvf +
⋅−=+
⋅−=+
⋅−===
= 111)()(
11
11
1
2
11
12
1
1
Diagramma di Bode
La f.d.t. presenta uno zero nell’origine e un polo diverso da zero.

20
ftinf/10 ftinf ftinf ·10
Con ftinf indichiamo la frequenza di taglio inferiore: 11
inf 2
1
CRft π
=
Questo circuito risulta essere un derivatore invertente per frequenze di lavo-
ro comprese tra 0 e ftinf /10; per frequenze di lavoro superiori a f >10ftinf , ha
un guadagno costante ( Avf(s)= -R2/R1 ), e si comporta come una normale
configurazione invertente. Quindi, se lo si vede come un amplificatore inver-
tente, esso non amplifica ugualmente a tutte le frequenze, ma solo a partire
da ftinf * 10 in poi. È, cioè, un amplificatore delle alte frequenze (Passa–Alto).
Se invece lo si vede come un derivatore, bisogna precisare che esso deriva
solo segnali con frequenze comprese tra 0 e ftinf / 10; i segnali a frequenze
superiori non vengono derivati.
A differenza del derivatore ideale, i disturbi in alta frequenza subiscono
un’amplificazione limitata e non sussiste l’inconveniente di una eccessiva
amplificazione di tali disturbi; col derivatore ideale, invece, maggiore era la
frequenza del disturbo e più alta risultava la relativa amplificazione. In que-
sto caso, i disturbi in alta frequenza hanno sempre lo stesso guadagno.

21
INTEGRATORE INVERTENTE IDEALE
Analisi nel dominio del tempo
2°Principio Kirchhoff maglia d’ingresso:
vs-R1is+vi=0; vi= 0; vs=R1is
2°Principio Kirchhoff maglia d’uscita:
vo+vc+vi=0; vi= 0; vo= -vc
Per il condensatore vale la relazione costitutiva dt
dvCi C
f ⋅= 2 ;
.1
;
21
21
212111
so
os
oCfss
vCRdt
dvdt
dvCRv
dt
dvCR
dt
dvCRiRiRv
−=
−=
⋅−=⋅⋅=⋅=⋅=
Integrando entrambi i membri da 0 a t (integrale definito) si ha:
;1
)()(;1
2121∫∫∫ −=−−=t
o
soo
t
o
s
t
o
o dtvCR
ovtvdtvCR
dtdt
dv
;1
)()(21∫−=t
o
soo dtvCR
ovtv
L’uscita è uguale all’integrale dell’ingresso, moltiplicato per una costante ne-
gativa, più il valore vO(0), che rappresenta il valore dell’uscita stessa
all’istante 0 (carica iniziale sul condensatore).
22
Analisi nel dominio di Laplace
sCRsCRR
sC
sZ
sZsA
s
fvf
21211
2 111
)(
)()( −=
⋅⋅−=−=−=
Otterremo così la funzione di trasferimento che è:
sCRsAvf
21
1)( −=
Analisi nel dominio di Fourier
Calcoliamo la risposta armonica:
2121
11)()(
CRjsCRsAjA
jsjsvfvf ω
ωω
ω−=−==
==
21
1)(
CRjjAvf ωω −=
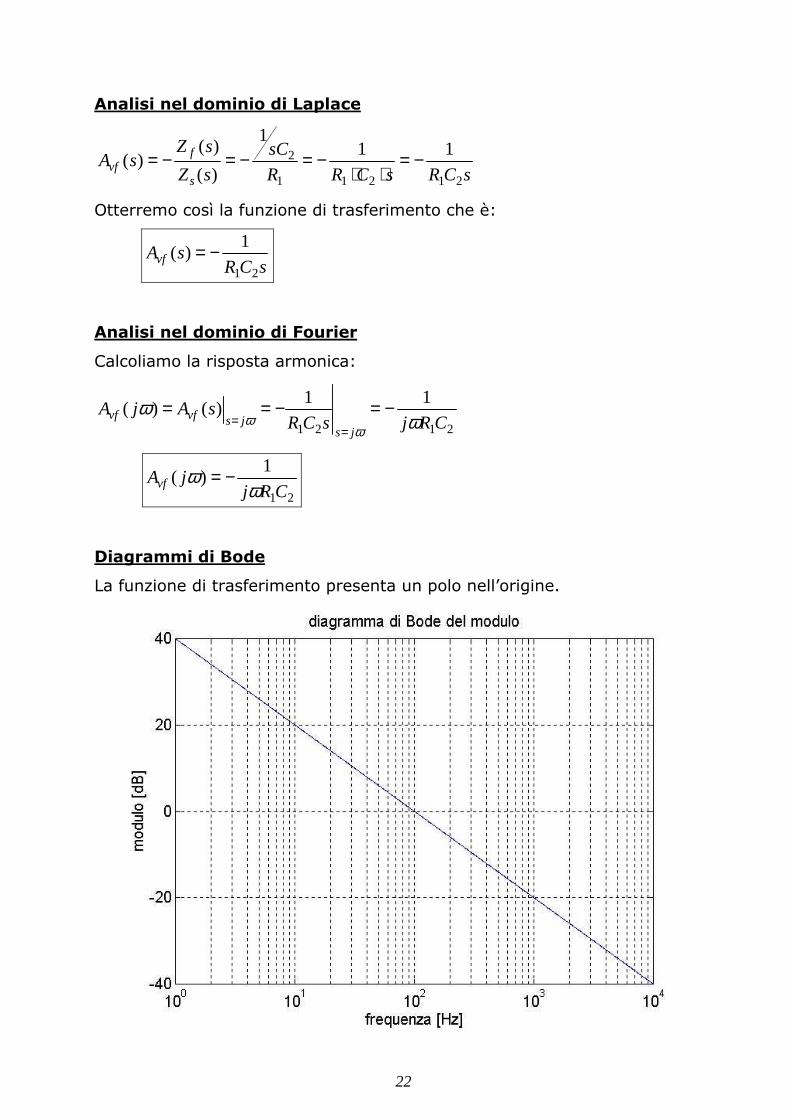
Diagrammi di Bode
La funzione di trasferimento presenta un polo nell’origine.

23
Inconvenienti integrale ideale
Segnale totale: vs(t)= vu(t)+ vdaf(t) + vdbf(t)
vs(t): è il segnale totale
vu(t): è il segnale utile
vdaf: Disturbi ad alta frequenza
vdbf: disturbi a basse frequenza
Quando un segnale viene integrato, vengono integrati anche i disturbi. Ora il
disturbo ad alta frequenza è integrato con un’amplificazione A3 inferiore a
quella A2 con cui viene integrato il segnale utile, e ciò è vantaggioso.Il di-
sturbo in bassa frequenza, invece, subisce un’amplificazione ben superiore a
quella del segnale utile: A1 > A3. Se, poi, il disturbo in bassa frequenza fosse
costituito da un segnale costante, seppure piccolissimo, esso subirebbe un
guadagno infinito.

24
INTEGRATORE INVERTENTE ATTIVO
Analisi nel dominio di Laplace
1
1
1
1)(
111
1
1//
)(
)()(
221
2
1
22
2
1
2
22
2
2
1
22
22
1
22
+⋅−=
+⋅−=
=+−=
+
−=+
⋅
−=−=−=
τsA
CsRR
RsA
R
CsR
R
R
sC
CsRsC
R
R
sCR
sCR
R
sCR
sZ
sZsA
vf
s
fvf
dove si è posto:
A pari al guadagno della configurazione invertente (-R2/R1);
ττττ pari alla costante di tempo R2C2 del circuito.
La funzione di trasferimento è quindi:
1
1)(
+⋅−=
τsAsAvf
Analisi nel dominio del tempo
Anche qui, come nel caso del derivatore attivo, non eseguiremo direttamen-
te l’analisi del circuito nel dominio del tempo, ma ricaveremo il legame in-
gresso-uscita eseguendo la Antitrasformata di Laplace della funzione di tra-
sferimento. Si ha allora:

25
soo
so
sso
s
ovf
VAVsV
VAVss
VA
sVAV
sA
V
VA
⋅−=+⋅⋅−=⋅+
+⋅−=
+⋅⋅−=
+⋅−==
ττ
ττ
τ
)1(11
1
1
1
dividendo tutto per la costante di tempo t si ha:
soo VA
VsVττ
−=+ 1
eseguendo la Antitrasformata di Laplace si ha infine l’equazione differenziale
che descrive il circuito:
soo v
Av
dt
dv ⋅−=⋅+ττ
1
Analisi nel dominio di Fourier
ωτωω
ωω j
ACRjR
R
CsR
CsR
R
RsAjA
jsjsvfvf +
⋅−=+
⋅−=+
⋅−===
= 1
1
1
1
1)()(
221
2
11
12
1
1
Diagramma di Bode
La f.d.t. presenta un polo diverso da zero.

26
ftinf/10 ftinf ftinf ·10
Con ftsup indichiamo la frequenza di taglio inferiore: 22
sup 2
1
CRft π
=
Questo circuito risulta essere un integratore invertente per frequenza di la-
voro f>ftsup*10; per frequenze di lavoro inferiore a ftsup / 10, ha un guadagno
costante(Avf =- R2 / R1), ed è come una normale configurazione invertente.
Quindi, se lo si vede come un amplificatore invertente, amplifica segnali con
frequenze che si trovano tra 0 e ftsup / 10. È, cioè, un amplificatore con fil-
traggio delle basse frequenze (Passa – Basso). Se, invece, lo si vede come
integratore, bisogna precisare che esso integra solo segnali con frequenze
superiori a ftsup·10; i segnali a frequenze inferiore non vengono integrati . A
differenza dell’integratore ideale, i disturbi in bassa frequenza, compresa la
componente continua, subiscono un’amplificazione limitata e non sussiste
più l’inconveniente di una eccessiva amplificazione di tali disturbi; con
l’integratore ideale, minore era la frequenza del disturbo, più alta risultava la
relativa amplificazione.

27
AMPLIFICATORE LOGARITMICO E ANTILOGARITMICO
Ricordiamo preventivamente la relazione costitutiva di un Diodo Raddrizzato-
re: I
i = I0 (eqv/ηkT -1) = I0 (ev/ηVT-1), ponendo V T= kT/q
V si ha i = I0 (ev/VT -1) ≈ I0 ev/hVT per polarizzazioni positive.
Invertendo la relazione i ≈ I0 ev/hVT si ha: v = VT·log(i / IO)
Amplificatore Logaritmico Invertente
Relazione Ingresso-Uscita:
v0 = -v; essendo v = VT · ln ( i / I0) abbiamo:
v0= - VT · ln( i / I0 ), ma poiché i = is e is= vs / Rs si ha quindi:
v0 = -VT · ln (vs /I0 Rs) (1)
La tensione d’uscita è, a meno di opportune costanti, pari al logaritmo della
tensione d’ingresso.
Nota: Si deve notare che la (1) vale finché il diodo è in conduzione diretta,
cioè finché la tensione d’ingresso vs>0.

28
Amplificatore Antilogaritmico Invertente
Relazione Ingresso – Uscita:
v0 = -Rf · if ;
essendo if =i e i = I0 · ev/VT si ha:
v0 = -Rf · I0 ev/Vt , ma si ha vs = v e quindi
v0 = -Rf I0 evs/Vt (2)
La tensione d’uscita è quindi, a meno di opportune costanti, pari
all’esponenziale della Tensione d’ingresso (Amplificatore Esponenziale o Anti-
logaritmico)
Nota: Anche la (2) vale finché il diodo è in condizione diretta, cioè finché
vs>0.
I due circuiti visti sopra sono a "Bassa dinamica", cioè presentano
l’inconveniente che le relazioni (1) e (2), valide per vs>0, sono rispettate in
un range limitato dei valori d’ingresso. Per estendere la gamma di validità
delle relazioni (3) e (4) in un più ampio range d’ingresso, spesso il diodo è
sostituito da un BJT.
N.B. L’Amplificatore logaritmico e antilogaritmico sono due dispositivi Non
Lineari, poiché le operazioni di logaritmo ed esponenziali non sono Lineari.
29
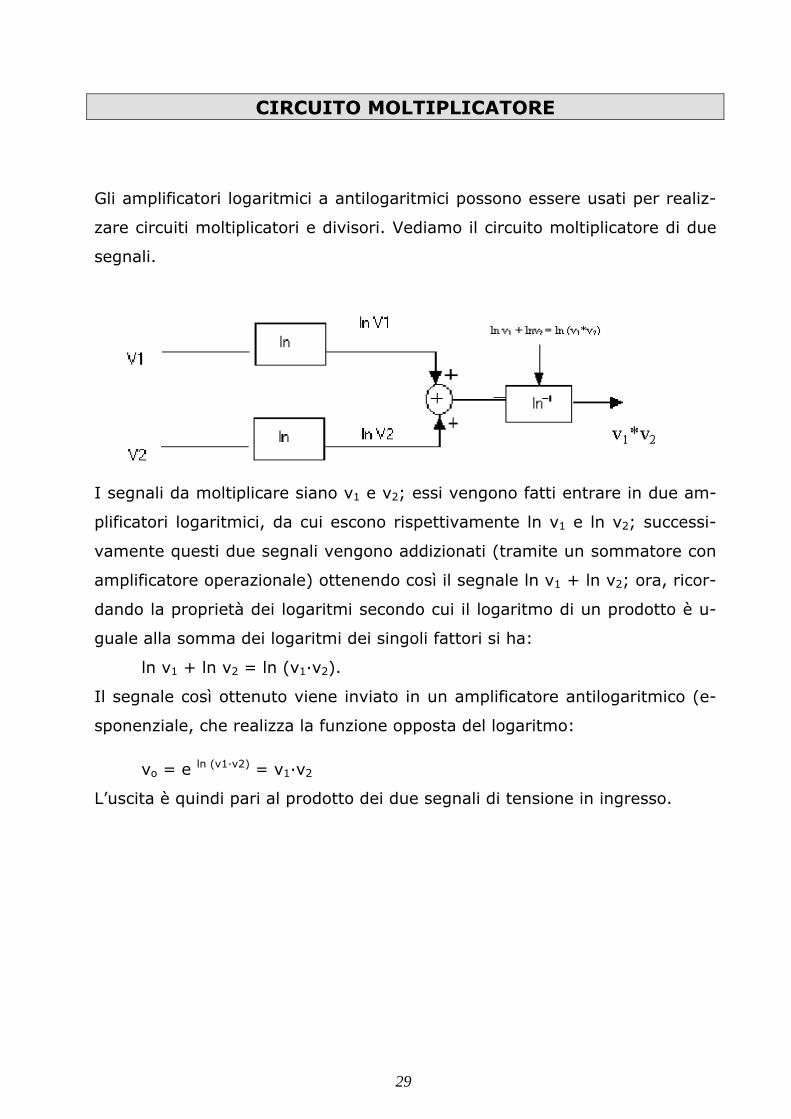
CIRCUITO MOLTIPLICATORE
Gli amplificatori logaritmici a antilogaritmici possono essere usati per realiz-
zare circuiti moltiplicatori e divisori. Vediamo il circuito moltiplicatore di due
segnali.
I segnali da moltiplicare siano v1 e v2; essi vengono fatti entrare in due am-
plificatori logaritmici, da cui escono rispettivamente ln v1 e ln v2; successi-
vamente questi due segnali vengono addizionati (tramite un sommatore con
amplificatore operazionale) ottenendo così il segnale ln v1 + ln v2; ora, ricor-
dando la proprietà dei logaritmi secondo cui il logaritmo di un prodotto è u-
guale alla somma dei logaritmi dei singoli fattori si ha:
ln v1 + ln v2 = ln (v1·v2).
Il segnale così ottenuto viene inviato in un amplificatore antilogaritmico (e-
sponenziale, che realizza la funzione opposta del logaritmo:
vo = e ln (v1·v2) = v1·v2
L’uscita è quindi pari al prodotto dei due segnali di tensione in ingresso.

30
CIRCUITO DIVISORE
Il circuito divisore differisce dal moltiplicatore per il solo fatto che il nodo
sommatore centrale è sostituito da un sottrattore (sempre realizzato con
A.O.).
Il questo modo in uscita al sottrattore è presente il segnale ln v1 - ln v2; la
proprietà dei logaritmi che applichiamo ora è quella secondo la quale il loga-
ritmo di un quoziente è uguale alla differenza fra il logaritmo del dividendo e
il logaritmo del divisore
ln v1 - ln v2 = ln (v1 / v2).
Il segnale così ottenuto viene inviato in un amplificatore antilogaritmico (e-
sponenziale, che realizza la funzione opposta del logaritmo e quindi si ha:
vo = e ln (v1/v2) = v1/v2
L’uscita è quindi pari al quoziente dei due segnali di tensione in ingresso.
Nota: Il moltiplicatore e il divisore sono due dispositivi non lineari, poiché la
moltiplicazione e la divisione sono operazioni non lineari.

31
CODIFICA PCM
La prima tecnica di codifica adottata nelle reti di telecomunicazione è stata la
tecnica PCM (pulse code modulation). I principi di tale tecnica sono stati de-
finiti già nel 1938 da Alec Reves anche se, per motivi di carattere tecnologi-
co, la sua prima applicazione in sistemi commerciali risale al 1962. Un codec
PCM dal lato della trasmissione effettua la codifica di un segnale analogico,
caratterizzato da una banda banda inferiore a 4 kHz, in un segnale digitale
PCM caratterizzato da una velocità di emissione (o bit rate) pari a 64 kbit/s,
mentre dal lato della ricezione effettua la decodifica, cioè a partire dal se-
gnale digitale PCM ricevuto riproduce un segnale analogico proporzionale a
quello originario.
Codifica PCM
Lato trasmissione, la codifica in digitale di un segnale analogico secondo la
tecnica PCM avviene concettualmente in due passi:
conversione analogico/digitale, che implica le operazioni di:
• campionamento del segnale analogico con frequenza pari a 8 kHz;
• codifica di ogni campione effettuata con almeno 12 bit/campione;
• compressione digitale del segnale; la dinamica del segnale viene com-
pressa in modo digitale per consentire la riduzione da 12 a 8 del nu-
mero di bit con cui si codifica ogni campione.
La velocità di emissione di un codificatore PCM risulta pari a 64 kbit/s.

32
Decodifica PCM
Lato ricezione vengono effettuate le operazioni inverse rispetto a quelle di
trasmissione cioè:
• espansione del segnale, in modo da riportare da 8 a 12 i bit / campio-
ne;
• conversione digitale/analogico (D/A), che implica le operazioni di:
1. decodifica; permette di trasformare ogni gruppo di 12 bit in un
campione avente una data ampiezza;
2. quantizzazione; è dovuta al fatto che un campione viene codificato
con un numero finito di bit (12), per cui le ampiezze dei campioni
che si possono ricostruire sono anch’esse in numero finito e pari a
4096. La quantizzazione introdotta dai soli processi di conversione
A/D e D/A viene definita quantizzazione uniforme (o lineare). Con
il processo di compressione si passa, poi, a una quantizzazione non
uniforme (o non lineare);
3. ricostruzione del segnale analogico a partire dai campioni decodifi-
cati. Tramite un filtraggio è possibile riottenere un segnale analogi-
co sostanzialmente proporzionale a quello di partenza.
Campionamento e ricostruzione del segnale analogico
Il campionamento è quell’operazione che consiste nel prelevare a intervalli di
tempo regolari, definiti da un clock di campionamento che ne determina la
frequenza, dei valori di ampiezza assunti dal segnale analogico in ingresso.
I valori prelevati vengono denominati campioni. Lo scopo del campionamen-
to è quello di generare un segnale, detto segnale campionato, che sia codifi-
cabile senza ambiguità. Infatti un generico circuito di conversione A/D, a n
bit, trasforma un singolo valore di ampiezza, cioè un campione, in una se-
quenza di n bit. Poiché il circuito impiega un certo tempo per effettuare la
codifica, risulta evidente che il valore di ampiezza non deve cambiare
nell’intervallo di tempo di codifica. Ne derivano due conseguenze:
1. la frequenza di campionamento è strettamente correlata alla frequenza
massima del segnale in ingresso, come indicato dal teorema del cam-

33
pionamento; è quindi necessario filtrare preventivamente il segnale
per definire con precisione la frequenza massima del segnale analogi-
co;
2. il campionamento deve prelevare un singolo valore da presentare al
codificatore. L’operazione di campionamento dovrebbe essere presso-
ché istantanea.
Ci si può chiedere se il campionamento causi o meno una distorsione del se-
gnale. La risposta a questa domanda è stata data da Claude E. Shannon
tramite l’enunciazione e la dimostrazione del teorema del campionamento (o
di Shannon), che afferma quanto segue.
Dato un segnale analogico a banda limitata, avente cioè una frequenza mas-
sima a nota, è possibile campionare tale segnale e ricostruire da esso il se-
gnale di partenza, senza alcuna distorsione, purché siano soddisfatte due
condizioni:
1. la durata di ogni campione sia infinitesima (in pratica molto minore
dell’intervallo di campionamento), in modo tale da prelevare senza
ambiguità un solo valore alla volta del segnale in ingresso;
2. la frequenza di campionamento sia almeno doppia rispetto alla fre-
quenza massima del segnale analogico.
fc > 2·fmax
Sample & Hold
Un circuito di campionamento è così composto da due parti:
1. un interruttore elettronico che, pilotato dal clock di campionamento, si
chiude ciclicamente per un brevissimo intervallo di tempo, in modo da
far passare solamente un valore alla volta del segnale analogico;
l’interruttore realizza così il campionamento o sampling;
2. un circuito di memoria, realizzato usualmente con un condensatore, il
quale mantiene il valore del campione a livello costante per tutto il
tempo necessario alla conversione A/D.
34
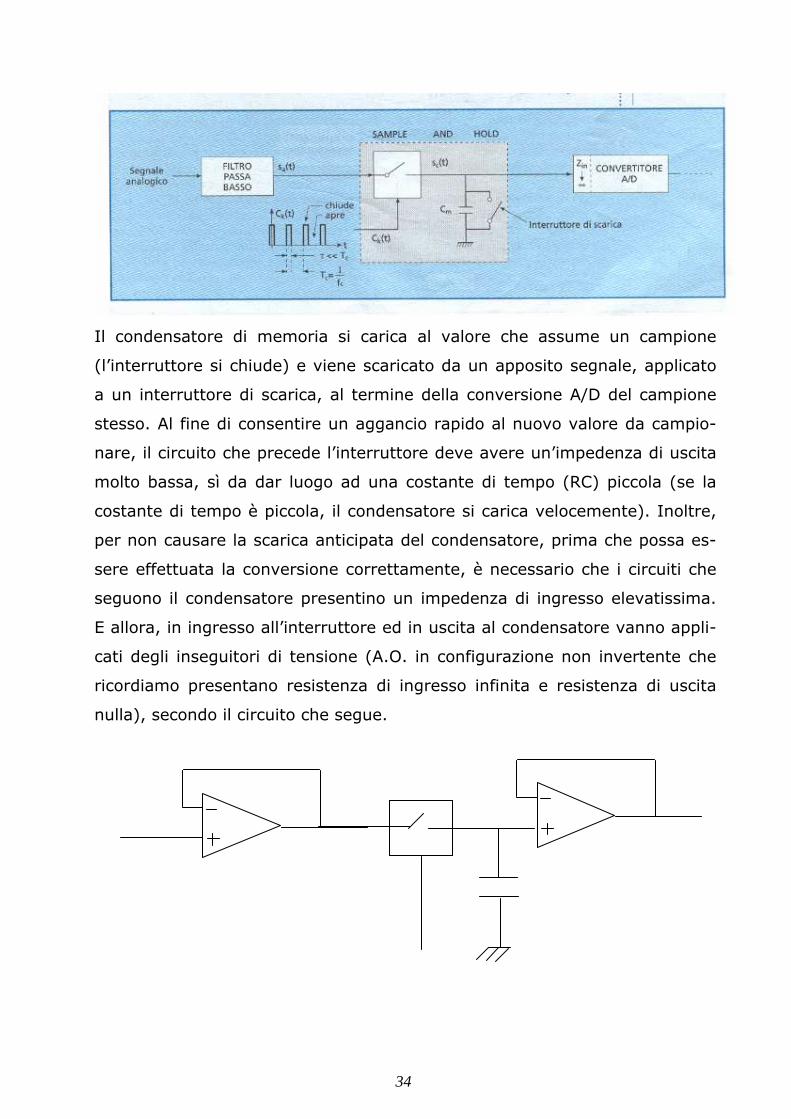
Il condensatore di memoria si carica al valore che assume un campione
(l’interruttore si chiude) e viene scaricato da un apposito segnale, applicato
a un interruttore di scarica, al termine della conversione A/D del campione
stesso. Al fine di consentire un aggancio rapido al nuovo valore da campio-
nare, il circuito che precede l’interruttore deve avere un’impedenza di uscita
molto bassa, sì da dar luogo ad una costante di tempo (RC) piccola (se la
costante di tempo è piccola, il condensatore si carica velocemente). Inoltre,
per non causare la scarica anticipata del condensatore, prima che possa es-
sere effettuata la conversione correttamente, è necessario che i circuiti che
seguono il condensatore presentino un impedenza di ingresso elevatissima.
E allora, in ingresso all’interruttore ed in uscita al condensatore vanno appli-
cati degli inseguitori di tensione (A.O. in configurazione non invertente che
ricordiamo presentano resistenza di ingresso infinita e resistenza di uscita
nulla), secondo il circuito che segue.

35
TRASFORMATA DI LAPLACE
In molti casi l’analisi dei sistemi lineari (tra essi rientrano i tipici circuiti
dell’Elettrotecnica costituiti da Resistori, Induttori e Condensatori) si sempli-
fica notevolmente se si ricorre ai metodi basati sulla trasformata di Laplace.
La trasformata di Laplace di una funzione reale di variabile reale f(t) (in una
funzione reale di variabile reale sia la variabile indipendente, sia la variabile
dipendente sono reali), definita per t ≥ 0, è una funzione complessa di va-
riabile complessa F(s) (in una funzione complessa di variabile complessa sia
la variabile indipendente, sia la variabile dipendente sono complesse) così
definita:
( ) [ ] dttfetfLsF st )()(0∫∞ −==
La trasformata di Laplace è definita quindi attraverso il calcolo di un integra-
le definito.
È possibile inoltre definire una trasformazione inversa, detta antitrasformata
di Laplace,che consente di effettuare la trasformazione opposta alla prece-
dente e cioè di passare da una funzione complessa di variabile complessa
F(s) ad una funzione reale di variabile reale f(t).
( ) [ ] dssFei
sFLtfia
ia
st )(2
1)(1
∫∞+
∞−
− ==π
In questo caso, l’integrale è da calcolare nel piano complesso, lungo una ret-
ta verticale con ascissa costante pari ad a.
Principali proprietà della trasformata di Laplace.
1. [ ] [ ] [ ] )()()()()()( 212121 sFsFtfLtfLtftfL +=+=+
La trasformata di Laplace della somma di due funzioni è uguale alla somma
delle singole trasformate.
36
2. [ ] [ ])()( tfLktfkL ⋅=⋅
La trasformata di Laplace del prodotto di una costante per una funzione è
uguale al prodotto della costante per la trasformata della funzione.
Queste due proprietà si possono riassumere dicendo che la trasformata di
Laplace è un’operatore lineare.
3. )()()( +−⋅=
ofsFstf
dt
dL
Questa proprietà evidenzia che se si trasforma la derivata di una funzione si
otterrà il prodotto di s (variabile complessa) per la trasformata della funzio-
ne non derivata. Vediamo così come alla derivazione nel dominio del tempo
corrisponde una semplice moltiplicazione per s nel dominio di Laplace.
4. )(
1)(
0sF
sdfL
t⋅=
∫ ττ
Questa proprietà dice che se si trasforma l’integrale di una funzione si otter-
rà il quoziente tra la trasformata della funzione non derivata e s. Vediamo
così come alla integrazione nel dominio del tempo corrisponde una semplice
divisione per s nel dominio di Laplace.

37
RISOLUZIONE DI UN’EQUAZIONE DIFFERENZIALE
Riprendiamo l’equazione differenziale che descrive il comportamento ingres-
so-uscita del circuito integratore attivo:
soo v
Av
dt
dv ⋅−=⋅+ττ
1
Si tratta chiaramente di un’equazione differenziale lineare (lineare vuol dire
che la vo e le sue derivate compaiono sempre e solo con esponente 1) del 1°
ordine (l’ordine di un’equazione differenziale è il massimo ordine di deriva-
zione presente nell’equazione) a coefficienti costanti (il fattore che moltiplica
la vo, 1/τ, è costante).
Il secondo membro è uguale ad una costante negativa moltiplicata per la
funzione del tempo vs(t), che rappresenta l’ingresso. Supponiamo che la
vs(t) sia una rampa lineare:
ttvs =)(
l’equazione differenziale si caratterizza così:
tA
vdt
dvo
o ⋅−=⋅+ττ
1
Consideriamo l’equazione omogenea associata e risolviamola:
tctct
oo
o
o
o
o
o
oo
o
oo
keeeevctv
dtv
dvdt
v
dvdt
v
dvv
dt
dv
vdt
dv
⋅−⋅−+⋅−=⋅==+⋅−=
−=⋅−=⋅−=⋅−=
=⋅+
∫ ∫∫ ∫
ττττ
ττττ
τ
111
;1
)ln(
;1
;1
;1
;1
01
t
omogo kev⋅−
= τ1
. (1)
Adesso dobbiamo ricercare una soluzione dell’equazione completa; essendo
il secondo membro una funzione polinomiale della t, ipotizziamo che vo sia
anch’essa un polinomio, del 1° ordine:
;btavo +⋅=

38
adt
dvo =
Sostituendo nell’equazione completa si ha:
tAb
ata
tAb
ta
atA
btaa
tA
vdt
dvo
o
⋅−=++⋅⋅−=+⋅+⋅−=+⋅⋅+
⋅−=⋅+
ττττττττ
ττ
;;)(1
;1
dal confronto tra 1° e 2° membro si ha:
=+
−=
0τ
ττb
a
Aa
da cui si ricavano a e b:
=⋅−=−=
ττ Aab
Aa
e quindi la soluzione di tentativo vale:
τ⋅+⋅−=+⋅= AtAbtav eparticolaro (2)
La soluzione completa dell’equazione differenziale vale allora:
ττ ⋅+⋅−=⋅−
AtAkevt
o
1
(3)
Vogliamo infine calcolare quella particolare soluzione che soddisfa la seguen-
te condizione iniziale:
0)0( =ov
sostituendo nella (3) si ottiene:
τττττ AkAkAkeAAkevo −=⇒=+=⋅+=⋅+⋅−=⋅−
00)0( 001
L'equazione diviene così:
τττ ττ AtAeAAtAkevtt
o +⋅−−=⋅+⋅−=⋅−⋅− 11
ed infine:
])1([1
teAvt
o −−⋅=⋅−
ττ

39
LOGARITMI
L’equazione a x = N ammette sempre soluzione, sotto la sola condizione che
a e n siano numeri positivi ed a diverso dall’unità. Il numero x che soddisfa
l’equazione esponenziale si dice logaritmo del numero N a base a e si denota
con
log a N
Le due equazioni a x = N e x = log a N sono quindi equivalenti fra loro, e
concluderemo col dire che il logaritmo di un numero (positivo), in una data
base (positiva, diversa da 1), è l’esponente che bisogna dare alla base per
ottenere il numero dato.
Proprietà dei logaritmi.
Qualunque sia la base, i logaritmi godono di importanti proprietà che ora di-
mostreremo.
Teorema: Il logaritmo di un prodotto è uguale alla somma dei logaritmi dei
singoli fattori.
Si deve dimostrare che se m ed n sono numeri reali positivi
log a (m · n) = log a m + log a n.
Se poniamo
log a m = x e log a n = y
Per definizione di logaritmo si ha
m = a x , n = a y
Moltiplicando membro a membro si ottiene
m · n = a x · a y = a x + y
E perciò, sempre per definizione di logaritmo e per le posizioni fatte,
log a (m · n) = x + y = log a m + log a n.
Teorema: Il logaritmo di un quoziente è uguale alla differenza fra il logarit-
mo del dividendo e il logaritmo del divisore, cioè
log a (m / n) = log a m - log a n.
Poniamo nuovamente

40
log a m = x e log a n = y
e quindi
m = a x , n = a y
Dividendo membro a membro, viene
m / n = a x / a y = a x - y
Perciò
log a (m / n) = x - y = log a m - log a n.
Teorema. Il logaritmo della potenza di un numero è uguale al prodotto
dell’esponente per il logaritmo del numero, cioè
log a b m = m · log a b
Infatti, poniamo
log a b = x e quindi b = a x
Elevando ambedue i membri di questa eguaglianza alla m-esima potenza,si
ha
b m = (a x ) m = a m · x
Da cui, per definizione di logaritmo e per la posizione fatta,
log a b m = m x = m · log a b.

41
LISTATO DEI PROGRAMMI MATLAB PER LA REALIZZAZIONE DEI DIAGRAMMI DI BODE DEI MODULI
DIAGRAMMA BODE DERIVATORE IDEALE
R2=10e3; C1=159e-9; num=[-R2*C1 0];\ den=[1]; f=logspace(0,4,1000); ome=2*pi*f; [mod,fase]=bode(num,den,ome); G=20*log10(mod); % % GRAFICO MODULO clg; semilogx(f,G); axis([1 10000 -40 40]); grid; title('diagramma di Bode del modulo'); xlabel('frequenza [Hz]'); ylabel('modulo [dB]'); DIAGRAMMA BODE DERIVATORE ATTIVO
R1=10e3; R2=100e3; C1=159e-9; A=-R2/R1; tau=R1*C1; num=A*[tau 0]; den=[tau 1]; f=logspace(0,4,1000); ome=2*pi*f; [mod,fase]=bode(num,den,ome); G=20*log10(mod); % % GRAFICO MODULO clg; semilogx(f,G); axis([1 10000 -20 30]); grid; title('diagramma di Bode del modulo'); xlabel('frequenza [Hz]'); ylabel('modulo [dB]'); %
DIAGRAMMA BODE INTEGRATORE IDEALE
R1=10e3; C2=159e-9; num=[1]; den=[-R1*C2 0]; f=logspace(0,4,1000); ome=2*pi*f; [mod,fase]=bode(num,den,ome); G=20*log10(mod); % % GRAFICO MODULO clg; semilogx(f,G); axis([1 10000 -40 40]); grid; title('diagramma di Bode del modulo'); xlabel('frequenza [Hz]'); ylabel('modulo [dB]'); DIAGRAMMA BODE INTEGRATORE ATTIVO
R1=10e3; R2=10e4; C2=15.9e-9; A=R2/R1; num=-A*[1]; den=[R2*C2 1]; f=logspace(0,4,1000); ome=2*pi*f; [mod,fase]=bode(num,den,ome); G=20*log10(mod); % % GRAFICO MODULO clg; semilogx(f,G); axis([1 10000 -20 30]); grid; title('diagramma di Bode del modulo'); xlabel('frequenza [Hz]'); ylabel('modulo [dB]');

42
BIBLIOGRAFIA
• Pulitanò - Mete Matematiche Vol. 1 – Mc Graw Hill
• Pulitanò - Mete Matematiche Vol. 3 – Mc Graw Hill
• Ambrosiani – Componenti e circuiti analogici e di potenza – Tramonta-
na
• Ambrosini Perlasca – Sistemi di conversione e interfacciamento –
Tramontana


















