
Analisi preliminare per il posizionamento cinematico ... · Le operazioni descritte in questa tesi...
45
Dipartimento di Ingegneria Civile, Edile e Ambientale Corso di Laurea Triennale in Ingegneria per l’Ambiente e il Territorio Analisi preliminare per il posizionamento cinematico tramite dati GPS acquisiti nel progetto Roma Ocean World Relatore Chiar.mo Prof. MATTIA CRESPI Candidata CHIARA FRANCESCA TAGLIACOZZI matricola 1478787 Correlatori MARA BRANZANTI AUGUSTO MAZZONI Anno Accademico 2013-2014 Roma, 6 novembre 2014
Transcript of Analisi preliminare per il posizionamento cinematico ... · Le operazioni descritte in questa tesi...

Dipartimento di Ingegneria Civile, Edile e Ambientale
Corso di Laurea Triennale in Ingegneria per l’Ambiente e il Territorio
Analisi preliminare per il posizionamento cinematico
tramite dati GPS acquisiti nel progetto
Roma Ocean World
Relatore
Chiar.mo Prof.
MATTIA CRESPI
Candidata
CHIARA FRANCESCA
TAGLIACOZZI
matricola 1478787Correlatori
MARA BRANZANTI
AUGUSTO MAZZONI
Anno Accademico 2013-2014
Roma, 6 novembre 2014

Indice
Introduzione vi
1 Progetto Roma Ocean World 1
1.1 Il giro del mondo e l’Eco40 . . . . . . . . . . . . . . . . . . . . 2
1.2 Le attivita di ricerca . . . . . . . . . . . . . . . . . . . . . . . 5
1.3 Collaborazioni . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3.1 Contributo della geomatica al progetto . . . . . . . . . 6
2 Test di acquisizione e qualita dei dati 7
2.1 Problematiche relative alla collocazione ottimale . . . . . . . . 7
2.2 Quality check . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.3 Installazione dei GPS . . . . . . . . . . . . . . . . . . . . . . . 12
3 Elaborazione cinematica VADASE 14
3.1 Pre-elaborazione dei file . . . . . . . . . . . . . . . . . . . . . 14
3.2 Elaborazione tramite Kin-VADASE . . . . . . . . . . . . . . . 16
3.2.1 Kin-VADASE . . . . . . . . . . . . . . . . . . . . . . 16
3.2.2 File navigazionali e di configurazione . . . . . . . . . . 18
3.2.3 Elaborazione VADASE . . . . . . . . . . . . . . . . . . 20
3.3 Elaborazione sulle distanze tra i ricevitori nel tempo . . . . . . 21
3.3.1 Sincronizzazione delle epoche . . . . . . . . . . . . . . 22
3.3.2 Tracciamento dei grafici della distanza dei ricevitori . . 22
i

INDICE ii
4 Confronto elaborazione VADASE ed LGO 25
4.1 Elaborazione LGO . . . . . . . . . . . . . . . . . . . . . . . . 25
4.2 Precisione del Kin-VADASE . . . . . . . . . . . . . . . . . . . 27
4.2.1 Differenza Kin-VADASE-LGO in coordinate cartesiane
geocentriche . . . . . . . . . . . . . . . . . . . . . . . . 28
4.2.2 Differenza tra Kin-VADASE e LGO in coordinate car-
tesiane locali . . . . . . . . . . . . . . . . . . . . . . . 29
5 Conclusioni 32
Elenco delle figure
1.1 Imbarcazione Eco40 . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Percorso del giro del mondo . . . . . . . . . . . . . . . . . . . 3
1.3 Pannelli fotovoltaici e generatoli eolici installati sull’imbarca-
zione Eco40 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.4 Orto interno alla barca . . . . . . . . . . . . . . . . . . . . . . 4
2.1 Collocamento delle antenne GPS . . . . . . . . . . . . . . . . 10
2.2 Antenne GPS installate sulla tuga e in poppa alla barca . . . . 11
2.3 Collegamento interno ai tubolari tra le antenne e i ricevitori
GPS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.4 Ricevitori posizionati all’interno dell’imbarcazione . . . . . . . 13
3.1 Esempio di header di un file in formato RINEX . . . . . . . . 15
3.2 Esempio di osservazioni contenute in un’epoca di un file in
formato RINEX . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.3 Traiettoria dell’imbarcazione Eco40 effettuata durante il test
di navigazione . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.4 Distanze tra le antenne GPS installate sulla barca . . . . . . . 21
3.5 Andamento delle distanze tra le antenne GPS installate sulla
barca e dei valori del numero di satelliti . . . . . . . . . . . . . 23
3.6 Andamento delle distanze tra le antenne GPS installate sulla
barca e dei valori del PDOP . . . . . . . . . . . . . . . . . . . 24
4.1 Base GPS stimata con il metodo delle doppie differenze . . . . 26
iii

ELENCO DELLE FIGURE iv
4.2 Andamento differenza elaborazione Kin-VADASE e LGO nel
tempo in coordinate cartesiane geocentriche XYZ . . . . . . . 29
4.3 Andamento della differenza tra elaborazione Kin-VADASE e
LGO nel tempo in coordinate cartesiane locali . . . . . . . . . 30
Elenco delle tabelle
2.1 Parametri calcolati con il Quality Check . . . . . . . . . . . . 9
2.2 Parametri calcolati con il Quality Check . . . . . . . . . . . . 9
4.1 Indici di completezza per le elaborazioni VADASE e LGO dei
tre ricevitori . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.2 Parametri statistici delle differenze tra elaborazione Kin-VADASE
e LGO in coordinate cartesiane geocentriche . . . . . . . . . . 28
4.3 Parametri statistici delle differenze tra elaborazione VADASE
e LGO in coordinate cartesiane locali . . . . . . . . . . . . . . 31
v

Introduzione
La seguente trattazione si propone di descrivere le operazioni di analisi ed
elaborazione dei dati GPS acquisiti nella fase preliminare del progetto Roma
Ocean World.
Il Roma Ocean World e un’iniziativa sportiva, culturale e scientifica in-
quadrata nel contesto dei progetti ambientali ed ecosostenibili: il primo giro
del mondo in barca a vela effettuato in solitario, in autonomia energetica ed
alimentare, realizzato con un Class40 dallo skipper Matteo Miceli.
Durante la navigazione saranno effettuate misure sperimentali di parametri
ambientali, quali condizioni meteo-oceanografiche, vento, pressione atmosfe-
rica, temperatura dell’acqua marina e dell’aria, e correnti superficiali. Saran-
no studiati anche parametri cinematici per determinare sia la posizione che
l’assetto dell’imbarcazione stessa, al fine di descriverne i movimenti durante
la navigazione.
Questi dati verranno acquisiti in parte con strumentazione elettronica
presente sulla barca e in parte con apparecchiature appositamente installate
a bordo da ditte specializzate che hanno collaborato con il Dipartimento di
Ingegneria Civile, Edile e Ambientale (DICEA) dell’Universita La Sapienza.
Fanno parte di questi dispositivi tre ricevitori GPS ad alta precisione, for-
niti dalla societa Leica Geosystems AG in collaborazione con l’Universita La
Sapienza di Roma. Il responsabile tecnico scientifico del progetto e il Prof.
Paolo De Girolamo del DICEA dell’Universita La Sapienza.
Le misure eseguite con questi dispositivi saranno in seguito analizzate per
ottenere i parametri cinematici, studiando, in particolare, la variazione del-
vi

INTRODUZIONE vii
l’assetto dell’imbarcazione nel tempo rispetto ad un sistema di riferimento
interno. Si potranno cosı ricostruire le onde del vento e quelle oceaniche
incontrate in navigazione. I tre GPS sono stati posizionati in modo tale da
poter ricostruire, mediante le coordinate di ogni singolo ricevitore, sia la tra-
iettoria precisa della barca che l’assetto di quest’ultima, in modo da poter
determinare gli ondeggiamenti dell’imbarcazione.
Le operazioni descritte in questa tesi si collocano nella fase di verifica e al-
lestimento precedente l’inizio del progetto Roma Ocean World, e riguardano
l’analisi dati GPS acquisiti nei mesi precedenti la partenza.
Con lo scopo di ricercare un’innovativa metodologia di analisi dei dati
GPS semplice e precisa, le elaborazioni esposte nella trattazione sviluppano
l’analisi dei dati GPS dal momento dell’installazione sino alla traccia della
traiettoria (durante una fase preliminare di test) ed al calcolo della precisione
delle coordinate elaborate.
Il fine e quello di ricercare un procedura che elabori le informazioni com-
plessive registrate durante la navigazione vera e propria restituendo i dati
sperimentali richiesti.
Durante la traversata, i ricevitori GPS registreranno i dati acquisiti in ap-
posite schede di memoria. Queste informazioni, una volta terminata la na-
vigazione, saranno sottoposte ad elaborazione e analisi da parte dell’Area di
Geodesia e Geomatica del DICEA dell’Universita La Sapienza di Roma.
Tramite metodologie innovative, seguendo l’iter di procedimento descritto
in questa trattazione, si otterra un resoconto complessivo ed accurato delle
posizioni occupate dall’imbarcazione durante i cinque mesi di navigazione.
L’algoritmo Kin-VADASE, utilizzato per elaborare i dati GPS acquisiti, e
un’estensione realizzata nel settembre 2014 del software VADASE sviluppato
dall’Area di Geodesia e Geomatica del DICEA e brevettato dall’Universita
La Sapienza di Roma.
Il VADASE, originariamente pensato per applicazioni statiche, stima le velo-
cita (quindi tramite integrazione anche gli spostamenti) di un ricevitore stand
alone posizionato in qualsiasi punto della superficie terrestre. In questa oc-

INTRODUZIONE viii
casione, e grazie alla suddetta estensione, tale algoritmo e stato impiegato
per la prima volta per il posizionamento cinematico.
Saranno illustrati i passaggi necessari per trasformare le osservazioni acquisite
dai ricevitori GPS in coordinate ad elevata precisione, al fine di dimostrare la
riuscita dell’applicazione di tale metodologia in questo particolare contesto.
Capitolo 1
Progetto Roma Ocean World
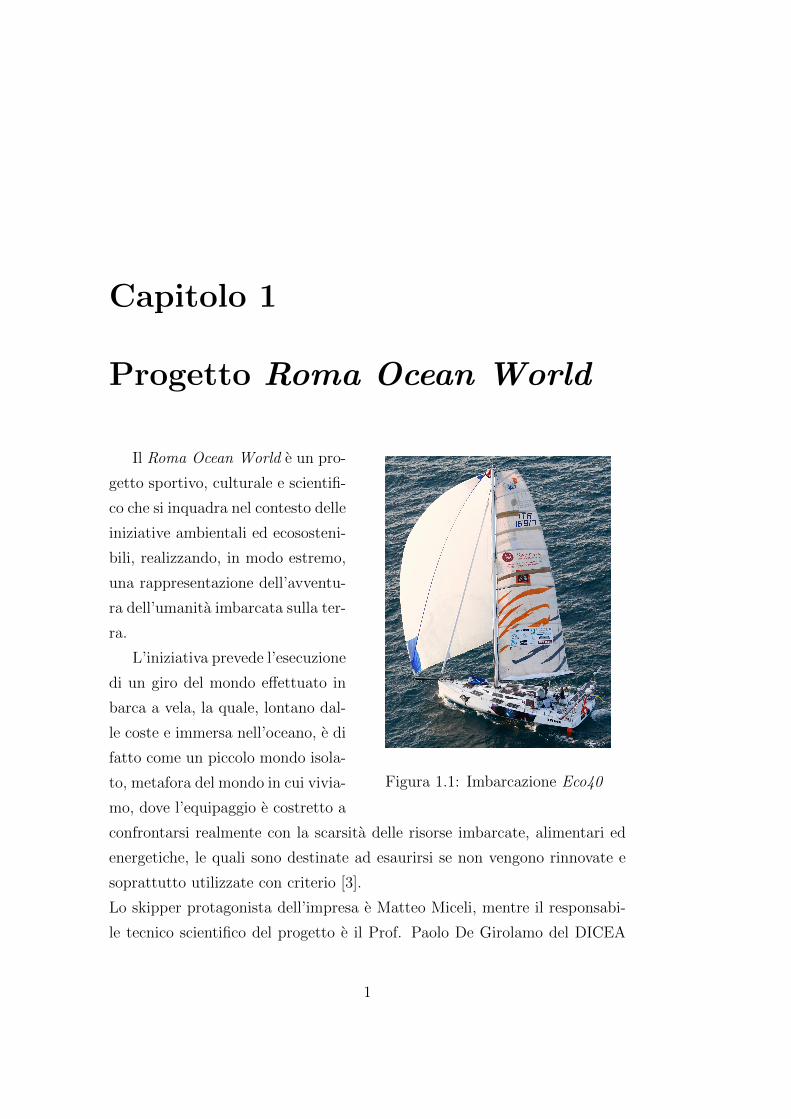
Il Roma Ocean World e un pro-
Figura 1.1: Imbarcazione Eco40
getto sportivo, culturale e scientifi-
co che si inquadra nel contesto delle
iniziative ambientali ed ecososteni-
bili, realizzando, in modo estremo,
una rappresentazione dell’avventu-
ra dell’umanita imbarcata sulla ter-
ra.
L’iniziativa prevede l’esecuzione
di un giro del mondo effettuato in
barca a vela, la quale, lontano dal-
le coste e immersa nell’oceano, e di
fatto come un piccolo mondo isola-
to, metafora del mondo in cui vivia-
mo, dove l’equipaggio e costretto a
confrontarsi realmente con la scarsita delle risorse imbarcate, alimentari ed
energetiche, le quali sono destinate ad esaurirsi se non vengono rinnovate e
soprattutto utilizzate con criterio [3].
Lo skipper protagonista dell’impresa e Matteo Miceli, mentre il responsabi-
le tecnico scientifico del progetto e il Prof. Paolo De Girolamo del DICEA
1

1.1 Il giro del mondo e l’Eco40 2
dell’Universita La Sapienza di Roma.
Concretamente, il progetto si propone di raggiungere quattro eco-obiettivi
principali:
• Mostrare i cambiamenti visibili, in atto nelle terre e nei mari toccati in
questo periodo.
• Contribuire all’indagine scientifica, sia oceanografica biologica che fisica
con campionamenti, misure e prelievi.
• Dimostrare la possibilita di una navigazione effettuata solamente con
fonti energetiche rinnovabili, attraverso odierne tecnologie e un atteg-
giamento responsabile;
• Effettuare una sperimentazione reale dell’effettiva efficacia e affidabilita
delle innovative soluzioni tecnologiche per la mobilita sostenibile [3].
1.1 Il giro del mondo e l’Eco40
Il progetto, patrocinato dall’Universita La Sapienza e dalla Regione La-
zio, punta a battere tre record: compiere il primo giro del mondo in solitario
senza combustibili fossili a bordo e quindi in autonomia energetica, il pri-
mo giro del mondo in solitario in autonomia alimentare e il primo giro del
mondo in solitario dall’Europa con un Class40. La rotta di ECO40 prevede
di doppiare i “Tre Capi”, quello di Buona Speranza, Capo Lewinn e Capo
Horn, circumnavigando quindi l’Antartico.
La finalita ultima dell’impresa e la realizzazione di un giro del mondo su
un’imbarcazione ecosostenibile a bordo dell’unita prototipica sviluppata Eco40.
L’imbarcazione, la Class40 che il velista Matteo Miceli condurra in so-
litario attorno al globo per circa 27.000 miglia nautiche, senza assistenza
e senza scalo, viaggia in completa autonomia energetica, idrica e alimenta-
re. La Class40, realizzata con la tecnica dell’infusione sottovuoto di resina
epossidica e con albero e bompresso in carbonio, e alimentata da pannelli fo-

1.1 Il giro del mondo e l’Eco40 3
Figura 1.2: Percorso del giro del mondo
tovoltaici calpestabili, due generatori eolici e due idroturbine a immersione,
che trasformano in energia elettrica il movimento dello scafo.
L’energia prodotta a bordo e accumulata mediante batterie al litio e l’il-
luminazione e interamente costituita da led ecologici; a bordo e presente un
motore elettrico da 7 KW, necessario per le manovre nei porti.
Figura 1.3: Pannelli fotovoltaici e generatoli eolici installati sull’imbarcazione
Eco40

1.1 Il giro del mondo e l’Eco40 4
Il sistema di acquisizione dati di bordo e il software di controllo sono stati
progettati e realizzati dagli ingegneri dell’Universita La Sapienza, che si sono
occupati anche dell’integrazione delle varie fonti energetiche. Il nutrimento
del suo comandante e invece assicurato da un orto biologico, illuminato ar-
tificialmente, irrigato con acqua di mare desalinizzata e fertilizzato con un
compost marino a base di alghe e residui alimentari e fisici prodotti dal pilota.
Per le proteine necessarie alla sopravvivenza, ad integrazione di quelle
fornite dalla pesca, ci saranno due compagne di viaggio speciali: le galline
LaBionda e LaMora che hanno gia affrontato il mare aperto in numerose
occasioni.
Figura 1.4: Orto interno alla barca
Questa spartana imbarcazione, che tuttavia nella sua semplicita e un
”patrimonio” sia economico che culturale, ha preso il largo salpando dal porto
di Riva di Traiano il 19 ottobre 2014. La navigazione e prevista della durata
di circa cinque mesi, in completa autosufficienza energetica ed alimentare.

1.2 Le attivita di ricerca 5
1.2 Le attivita di ricerca
I parametri oggetto di misura riguardano sia le condizione meteo-ocea-
nografiche incontrate dall’imbarcazione durante la navigazione, sia la po-
sizione e l’assetto dell’imbarcazione stessa nel tempo. I parametri meteo-
oceanografici che verranno misurati riguardano il vento, la pressione atmo-
sferica, la temperatura dell’acqua marina e dell’aria e le correnti superficiali,
mentre i parametri cinematici di posizione e assetto (e loro variazioni) del-
l’imbarcazione consentiranno di descrivere i movimenti della barca nel tempo.
Dai movimenti della barca verranno dedotte le altezze delle onde che l’imbar-
cazione incontrera durante la navigazione. Inoltre, l’analisi dei movimenti e
delle accelerazioni consentira di definire le azioni a cui l’imbarcazione e sog-
getta, con lo scopo di migliorare i relativi parametri di progetto.
Questi parametri verranno acquisiti in parte con strumentazione elettroni-
ca facente parte dell’equipaggiamento della barca e in parte con quella che
e stata appositamente installata a bordo da ditte specializzate che hanno
collaborato con il DICEA dell’Universita La Sapienza. L’analisi dei dati mi-
surati a bordo verra eseguita da ricercatori, dottorandi di ricerca e assegnisti
di ricerca afferenti al DICEA, coordinati dai docenti Paolo De Girolamo e
Mattia Crespi.
1.3 Collaborazioni
Al progetto hanno partecipato, a titolo gratuito o in qualita di sponsor
tecnici, alcuni ricercatori italiani, ad esempio afferenti del CNR e della facolta
di Agraria dell’Universita Federico II di Napoli, insieme a numerose societa
specializzate nella realizzazione delle attrezzature utilizzate in barca o nella
fornitura di servizi.

1.3 Collaborazioni 6
1.3.1 Contributo della geomatica al progetto
La societa svizzera Leica Geosystems AG, leader mondiale della strumen-
tazione GPS, si fara carico del traffico dati via satellite di Eco40 e ha inoltre
fornito tre ricevitori GPS ad alta precisione installati a bordo. Le misure
eseguite con questi dispositivi saranno analizzate per ottenere i parametri ci-
nematici al fine di studiare le onde del vento attraverso la ricostruzioni degli
spostamenti e delle inclinazioni della barca nel tempo rispetto ad un sistema
di riferimento interno.
Durante la navigazione i GPS acquisiranno dati che saranno post-processati
a fine traversata.
In questa trattazione ci occuperemo di descrivere le analisi preliminari ef-
fettuate prima della partenza dell’imbarcazione, dall’installazione di GPS alla
verifica dei metodi di elaborazione che saranno usati in seguito per elaborare
dati acquisiti durante la traversata.

Capitolo 2
Test di acquisizione e qualita
dei dati
2.1 Problematiche relative alla collocazione
ottimale
La prima operazione e stata quella di studiare e testare i GPS sull’imbar-
cazione, al fine di installarli nei punti migliori, sia rispetto alla ricezione del
segnale, sia rispetto alla collocazione ottimale dal punto di vista pratico.
Per esaminare la risposta dei GPS alle diverse situazioni di utilizzo a
cui andranno incontro, i ricevitori sono stati testati in differenti condizioni
di umidita, ponendo al di sopra dell’antenna vari strati di tessuto spugnoso
imbevuto di acqua salata. Il risultato, come ci si poteva aspettare, e stato
quello di veder diminuire la qualita del segnale con l’aumentare degli strati
bagnati, fino ad arrivare a quattro strati, che impedivano completamente la
ricezione del segnale.
La ricezione e ostacolata anche dalla transizione di flussi d’acqua sopra
l’antenna: per questo motivo e stata eseguita una prova ponendo l’antenna
all’interno della barca, a contatto con lo strato di resina che costituisce il
pavimento della coperta, in cui e stata fatta scorrere dell’acqua. Per piccoli
flussi il segnale era ancora presente, mentre per portate piu grandi (corrispon-
7

2.2 Quality check 8
denti circa a 20 l d’acqua riversata sul pavimento in pochi secondi) scompare
definitivamente.
In base a questi test si e pertanto deciso di posizionare i ricevitori in un
luogo in cui assolutamente non ristagni l’acqua, e che sia protetto dai flussi
che in navigazione attraversano la coperta della barca.
E’ stata studiata inoltre la geometria della barca, al fine di individuar,e
per il posizionamento dei GPS, luoghi saldi e protetti che non siano di
ostacolo alla navigazione.
Inoltre, per rappresentare e descrivere con piu accuratezza e precisio-
ne il piano della barca, le antenne dovrebbero rispettare una disposizione
simmetrica ed essere tra loro il piu distanziate possibile.
Durante questo prima fase di verifica, i ricevitori sono stati testati ac-
quisendo dati per brevi intervalli di tempo (circa dieci minuti ogni test) in
diversi punti e in differenti condizioni della barca.
I dati raccolti sono stati quindi registrati e analizzati, per confrontarli e
controllare ulteriormente la loro qualita.
2.2 Quality check
I dati acquisiti durante il primo sopralluogo, effettuato il 19 luglio 2014,
sono stati sottoposti ad un Quality check , ovvero una verifica della qualita
di ricezione, al fine di confermare le scelte di posizionamento operate durante
il sopralluogo.
I GPS registrano i dati salvandoli in formato proprietario (binario), i
quali, per essere analizzati, devono essere convertiti in formato standard
RINEX.
Questa operazione viene effettuata per mezzo del software Teqc, svilup-
pato dall’UNAVCO. Una volta creati i file RINEX, e possibile effettuare il
Quality Check semplicemente usando uno specifico comando in grado di crea-
re file di testo contenenti parametri e tabelle che riassumono la qualita dei
dati e del segnale.

2.2 Quality check 9
first last hrs dt expt have expt/ mp1 mp2 o/
epoch epoch have slps
10:30 11:03 .5531 1 13937 13395 96 0.28 0.27 197
Tabella 2.1: Parametri calcolati con il Quality Check
La tabella 2.1 raccoglie i parametri confrontati e analizzati a partire dal
file di testo prodotto dall’elaborazione del Quality Check. Sono indicati i
tempi di ricezione, informazioni sui satelliti e sulle osservazioni disponibili
ed effettuate, e parametri indicativi sul disturbo della ricezione, ovvero il
multipath.
S/N L1 summary S/N L2 summary
elev tot SN1 sig mean elev tot SN2 sig mean
85 - 90 0 0.000 0.000 85 - 90 0 0.000 0.000
80 - 85 0 0.000 0.000 80 - 85 0 0.000 0.000
75 - 80 0 0.000 0.000 75 - 80 0 0.000 0.000
70 - 75 0 0.000 0.000 70 - 75 0 0.000 0.000
65 - 70 912 1.761 39.926 65 - 70 912 2.238 34.514
60 - 65 1982 1.537 42.237 60 - 65 1982 2.277 34.381
55 - 60 982 1.776 41.881 55 - 60 982 4.182 30.485
50 - 55 588 2.184 39.612 50 - 55 586 4.052 29.682
45 - 50 657 1.975 40.170 45 - 50 991 3.493 32.241
35 - 40 3278 2.021 38.902 35 - 40 3253 5.053 29.544
30 - 35 1878 2.632 37.78 30 - 35 1828 5.326 29.055
25 - 30 341 2.992 38.023 25 - 30 340 4.758 30.230
20 - 25 1956 1.812 35.064 20 - 25 1864 5.707 29.539
15 - 20 0 0.000 0.000 15 - 20 0 0.000 0.000
Tabella 2.2: Parametri calcolati con il Quality Check

2.2 Quality check 10
A partire dai parametri sopraelencati, rappresentativi della qualita dei dati,
sono state tratte delle conclusioni riportando in tabelle riassuntive i dati piu
caratteristici delle diverse situazioni di acquisizione, calcolandone parametri
statistici come media e varianza. Nelle tabelle compaiono la percentuale di
osservazioni effettuate rispetto alle osservazioni disponibili, il multipath, e il
rapporto tra il numero di osservazioni e il disturbo.
Nell’analisi dei file del Quality Check creati a partire dalle diverse acquisizio-
ni, e stata concentrata l’attenzione sul parametro o/slps, indice del disturbo
con la quale sono state acquisite le osservazioni. Tale parametro e calcola-
to mediante rapporto tra le osservazioni effettuate e il numero di cycle-slip,
ovvero le interruzioni del segnale. Maggiore e il rapporto o/slpl, minori so-
no le interruzioni dell’acquisizione a causa dei cycle-slip, quindi migliore e il
segnale ricevuto.
Una ricezione ottimale richiede quindi una alta percentuale di osservazio-
ni effettuata, un basso multipath ed infine un elevato rapporto o/spls.
Queste tabelle hanno aiutato ad operare un confronto tra le diverse acqui-
sizioni, effettuate in luoghi e contesti diversi, scegliendo come luoghi ottimali
i punti in rosso indicati nella figura:
Figura 2.1: Collocamento delle antenne GPS
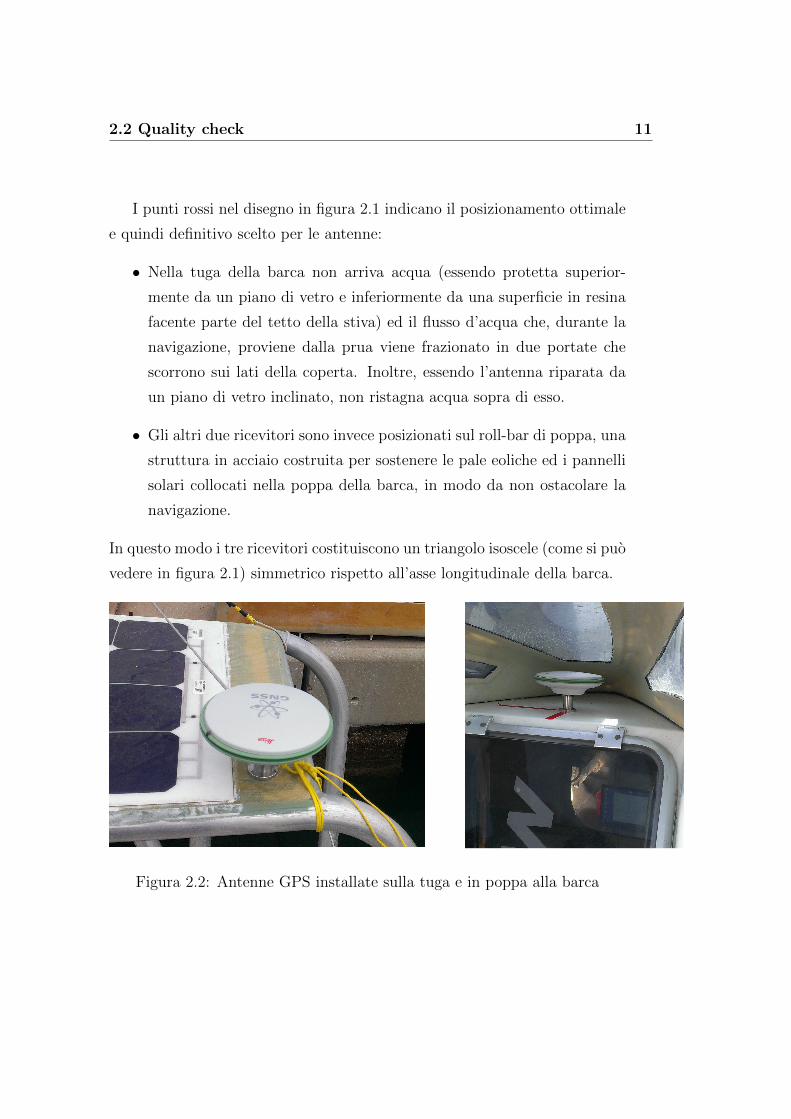
2.2 Quality check 11
I punti rossi nel disegno in figura 2.1 indicano il posizionamento ottimale
e quindi definitivo scelto per le antenne:
• Nella tuga della barca non arriva acqua (essendo protetta superior-
mente da un piano di vetro e inferiormente da una superficie in resina
facente parte del tetto della stiva) ed il flusso d’acqua che, durante la
navigazione, proviene dalla prua viene frazionato in due portate che
scorrono sui lati della coperta. Inoltre, essendo l’antenna riparata da
un piano di vetro inclinato, non ristagna acqua sopra di esso.
• Gli altri due ricevitori sono invece posizionati sul roll-bar di poppa, una
struttura in acciaio costruita per sostenere le pale eoliche ed i pannelli
solari collocati nella poppa della barca, in modo da non ostacolare la
navigazione.
In questo modo i tre ricevitori costituiscono un triangolo isoscele (come si puo
vedere in figura 2.1) simmetrico rispetto all’asse longitudinale della barca.
Figura 2.2: Antenne GPS installate sulla tuga e in poppa alla barca

2.3 Installazione dei GPS 12
2.3 Installazione dei GPS
Le due antenne di poppa sono state installate sul roll-bar, quindi collegate
ai ricevitori interni alla barca facendo passare i cavi antenna nei tubolari che
sostengono la struttura.
Figura 2.3: Collegamento interno ai tubolari tra le antenne e i ricevitori GPS
Tale soluzione, oltre a proteggere i cavi (seppur impermeabili) dall’ambiente
esterno, e anche ottima dal punto di vista pratico poiche, in questo modo, la
navigazione non e ostacolata da cavi che attraversano la coperta costituendo
cosı un impedimento agli spostamenti e alla gestione delle cime.
La terza antenna, ubicata nella tuga della barca, e stata montata sul
piano di resina che costituisce la copertura dell’ingresso nella stiva, e quindi
collegata (forando la resina) con i ricevitori situati, naturalmente, all’interno
della cabina.

2.3 Installazione dei GPS 13
Collegate tutte le antenne ai ricevitori, questi ultimi sono stati connessi
uno alla volta con un pc, tramite il quale sono stati attivati. Sono state cosı
fornite le impostazioni base per il salvataggio dei dati, che saranno registrati
in schede di memoria da 8 Gb, per un totale di 72 Gb, interne ai ricevitori.
Tra le impostazioni, ricordiamo:
• Intervallo di acquisizione di 2 Hz ( una acquisizione ogni 0.5 secondi)
• Lunghezza dei file delle osservazioni di un’ora.
• Denominazione dei file archiviati.
Figura 2.4: Ricevitori posizionati all’interno dell’imbarcazione

Capitolo 3
Elaborazione cinematica
VADASE
Per testare la ricezione del segnale durante la navigazione, simulando il
contesto nel quale i ricevitori acquisiranno i dati, e stata eseguita una prova
di navigazione nei dintorni del porto di Traiano, della durata di circa due ore.
In questo intervallo di tempo i GPS hanno acquisito le osservazioni a 2 Hz,
le quali, una volta estratte dalle schede di memoria ed elaborate, consentono
di rappresentare la traiettoria effettuata dall’imbarcazione (oltre ad altre
elaborazioni finalizzate all’analisi dell’assetto della barca non descritte in
questa trattazione).
Sono esposte in seguito le operazioni eseguite per trasformare i file creati
dai ricevitori in effettive coordinate, con le quali si possono descrivere gli
spostamenti e gli altri parametri cinematici dell’imbarcazione.
3.1 Pre-elaborazione dei file
Come gia descritto nel Capitolo 2 e stato necessario convertire i file in
formato standard RINEX (Capitolo 2).
I dati salvati dai GPS sono tuttavia frazionati in file di preimpostati
intervalli di tempo, nel nostro caso di un’ora. Otterremo quindi tanti file
14

3.1 Pre-elaborazione dei file 15
RINEX quante sono le ore contenute nel tempo di ricezione.
Per elaborarli in modo completo e necessario unirli, pero ogni ricevitore in
un unico file RINEX, all’interno del quale e possibile trovare le osservazioni
totali effettuate da ciascun ricevitore in uno specifico intervallo che si intende
analizzare.
Figura 3.1: Esempio di header di un file in formato RINEX
La figura 3.1 riporta le prime righe di un file di tipo RINEX contenente
le osservazioni effettuate dai ricevitori GPS. Il file RINEX inizia con una
parte di intestazione in cui vengono indicate alcune importanti informazioni:
il tipo di file (in questo caso sono osservazioni), il nome del file, la marca
e il modello dell’antenna e del ricevitore GPS, le coordinate approssimate
iniziali del ricevitore, la durata di ogni epoca di acquisizione, la prima e
l’ultima epoca di ricezione.
La figura 2.2 e un esempio dei valori osservati contenuti in un’epoca di
osservazione di in un file RINEX. La prima riga sta ad indicare l’epoca di
acquisizione, specificando anno, mese, giorno, ora, secondi e millesimi di
secondo, (utili nel caso di acquisizioni con frequenza maggiore di 1 Hz). I
valori che scorrono a seguire sono i veri e propri dati che acquisisce il GPS
a partire dai segnali ricevuti dai satelliti. Questi valori sono quelli che i

3.2 Elaborazione tramite Kin-VADASE 16
Figura 3.2: Esempio di osservazioni contenute in un’epoca di un file in
formato RINEX
software di decifrare ed elaborare al fine ricostruire le coordinate dei GPS ad
ogni istante di acquisizione.
3.2 Elaborazione tramite Kin-VADASE
3.2.1 Kin-VADASE
Il processamento dei dati e stato realizzato mediante il software Kin-
VADASE, sviluppato nell’ Area di Geodesia e Geomatica del Dipartimento
di Ingegneria Civile, Edile e Ambientale e brevettato dall’Universita La Sa-
pienza. L’estensione cinematica del software VADASE e stata applicata per
la prima volta su dati reali nell’ambito di questo progetto, al fine di valuta-
re gli spostamenti e le velocita dell’imbarcazione. E stato necessario infatti
modificare ed estendere l’algoritmo alla modalita cinematica implementando
il Kin-Vadase.
Tale modalita consente di ricavare tra due epoche successive la variazione di
posizione del ricevitore e dunque la velocita.
Mediante integrazione numerica delle soluzioni si ottengono gli spostamenti,
mediante differenziazione le accelerazioni.

3.2 Elaborazione tramite Kin-VADASE 17
L’algoritmo di elaborazione del VADASE parte da una soluzione inizia-
le, alla quale epoca per epoca, somma lo spostamento calcolato mediante
l’integrazione delle velocita stimate. Questa metodologia permette la stima
delle coordinate di ricevitori stand alone posizionati in qualsiasi punto della
superficie terrestre, indipendentemente dall’ausilio di stazioni di riferimento
permanenti.
Attualmente, l’elaborazione dati GPS con finalita cinematiche avviene
prevalentemente facendo ricorso al posizionamento differenziale. Questo ap-
proccio, sia in tempo reale che in post processing, consente di determinare la
posizione di un ricevitore mobile incognito rispetto ad uno o piu ricevitori di
riferimento, ovvero stazioni permanenti le cui posizioni sono note a propri,
generalmente gestite da un centro di controllo. In particolare, nel posiziona-
mento in tempo reale vengono sfruttate particolari informazioni inviate dal
centro di controllo delle stazioni di riferimento al ricevitore di cui si vuole
studiare il moto. Per tale ragione, e sempre necessaria una connessione dati
tra i ricevitori in questione.
Sarebbe alquanto proibitivo applicare questa metodologia nel progetto in
questione, sia per ragioni economiche, sia perche la navigazione potrebbe
risultare molto lontana dalle stazioni di riferimento.
Il vantaggio principale del Kinematic VADASE risiede quindi nella possi-
bilita di garantire la continuita delle soluzioni anche durante un’interruzione
momentanea della connessione alla rete. L’approccio variometrico infatti ri-
chiede esclusivamente messaggio navigazionale ed osservazioni collezionati da
un unico ricevitore stand-alone.
Il VADASE in modalita statica (cosı come sino ad ora e stato utilizato)
consente di determinare unicamente spostamenti del ricevitore di tipo oscilla-
torio, ovvero che si manifestano attorno ad una posizione media di equilibrio.
L’algoritmo in questo caso stima lo spostamento del ricevitore tra due epoche
successive a partire da un valore di posizione iniziale invariata la quale e nota
grazie alla lettura del file RINEX (input del software). Allo stato attuale di
sviluppo, il VADASE in modalita statica e in grado di lavorare solo quando

3.2 Elaborazione tramite Kin-VADASE 18
il movimento avviene in un’area prossima alla suddetta posizione iniziale. In
queste condizioni i risultati sono caratterizzati da una precisione dell’ordine
del centimetro in planimetria e di alcuni centimetri in quota. E’ per questa
ragione che ad oggi il VADASE ha trovato grande riscontro nel campo della
sismologia [2].
Per consentire lo studio con il VADASE di movimenti molto piu ampi, e
invece necessario aggiornare in maniera iterativa il valore di posizione iniziale
nel tempo, una volta determinato lo spostamento tra due epoche consecutive.
Pertanto, a partire da una posizione iniziale corrispondente alla prima
epoca di osservazione, l’approccio variometrico stima la variazione di posi-
zione del ricevitore tra due epoche consecutive, quindi la velocita.
Il VADASE richiede in input i seguenti file:
1. RINEX delle osservazioni
2. File navigazionali broadcast
3. File di configurazione
3.2.2 File navigazionali e di configurazione
I file navigazionali racchiudono le informazioni riguardanti il posiziona-
mento dei satelliti durante il tempo di ricezione dei dati GPS. I parametri
che permettono di ricostruire l’orbita del satelliti, chiamate efemeridi, sono
state prese dal portale online dalla NASA [5] , che fornisce quotidianamente
le efemeridi, sia broadcast che a lungo termine, di tutti i satelliti in orbita
sulla terra.
Nel nostro caso sono state usate le efemeridi broadcast disponibili in tem-
po reale, le quali vengono stimate mediante una previsione statistica sulla
base di dati registrati precedentemente al giorno dell’anno a cui si riferisco-
no. Questi parametri sono meno precisi di quelli a lungo termine, che sono
processati nelle settimane successive. Tuttavia essi sono state usati poiche
rappresentano meglio la condizione di utilizzo di dispositivi applicati su mez-
zi di trasporto per i quali, come nel nostro caso, vi e la necessita di calcolare
3.2 Elaborazione tramite Kin-VADASE 19
la traiettoria percorsa in tempo reale.
**** VADASE CONFIGURATION FILE ****
COMBINATION
L3
CONSTELLATION(S)
G
OBSERVATION(S)
L1W+L2W
PROCESSING SETTINGS
1
MINIMUM NUMBER OF SATELLITES
4
SATELLITE(S) TO BE EXCLUDED
NULL
TROPOSPHERE MODEL
4
IONOSPHERE MODEL
1
FILTER DATA IN DIFF VAR
0
SAGNAC EFFECT
1
COMPUTE RCV CLK OFFSET
1
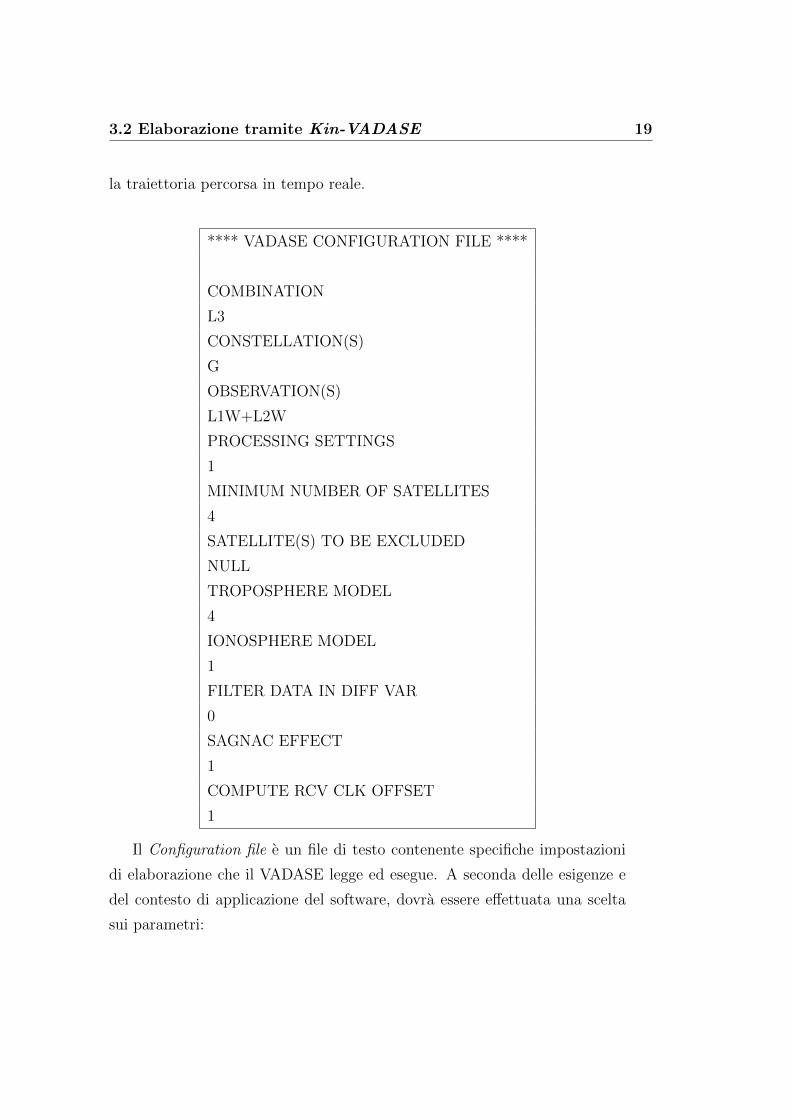
Il Configuration file e un file di testo contenente specifiche impostazioni
di elaborazione che il VADASE legge ed esegue. A seconda delle esigenze e
del contesto di applicazione del software, dovra essere effettuata una scelta
sui parametri:
3.2 Elaborazione tramite Kin-VADASE 20
• Combination: tipo di combinazione lineare tra le portanti, in questo
caso L3 sta per una combinazione lineare (ionospheric free).
• Constellation: costellazione di satelliti utilizzata, G = GPS, R =
GLONASS, E = GALILEO.
• Observation: tipo di osservazioni utilizzate.
• Processing setting: scelta di processamento statico o cinematico.
• Minimum number of satellites: numero minimo di satelliti neces-
sari per l’elaborazione.
• Troposphere model: scelta sulla modellizzazione della troposfera.
• Ionosphere model: scelta sulla modellizzazione della ionosfera.
3.2.3 Elaborazione VADASE
Il VADASE restituisce in output una serie di file, tra i quali un file di
testo contenente i parametri cinematici stimati epoca per epoca.
A partire da questi risultati e stato possibile quindi graficare una prima
traiettoria approssimata della barca. Studiando il funzionamento del soft-
ware VADASE appare chiara l’importanza della precisione delle coordinate
di partenza, in quanto le coordinate delle epoche successive sono ottenute
integrando le velocita stimate.
In un’elaborazione preliminare sono state usate come coordinate del punto
di partenza quelle approssimate fornite dagli stessi ricevitori GPS. Tuttavia
utilizzando i dati registrati prima della partenza, e possibile ricavare coordi-
nate piu precise delle posizioni iniziali dei tre ricevitori. Questa operazione
e stata effettuate tramite un server online () che consente, con approccio
Precise Point Positioning (PPP) in modalita statica, di stimare le coordinate
dei ricevitori sulla base delle osservazioni acquisite in fase di ormeggio.

3.3 Elaborazione sulle distanze tra i ricevitori nel tempo 21
Figura 3.3: Traiettoria dell’imbarcazione Eco40 effettuata durante il test di
navigazione
3.3 Elaborazione sulle distanze tra i ricevito-
ri nel tempo
Al fine di avere una stima qualitativa della precisione del kin-VADASE,
e stato eseguito un calcolo delle reciproche distanze tra i tre ricevitori e
dell’andamento di queste ultime nel tempo. Come termine di confronto, la
distanza fisica misurata a mano tra le due antenne di poppa e di 3.175 metri,
mentre tra quelle di poppa e quella ubicata nella tuga e di 4.175 metri.
Figura 3.4: Distanze tra le antenne GPS installate sulla barca
3.3 Elaborazione sulle distanze tra i ricevitori nel tempo 22
3.3.1 Sincronizzazione delle epoche
Per poter operare un confronto tra i dati registrati dai singoli ricevitori e
stata effettuata una sincronizzazione delle epoche e delle coordinate tramite
Excel. In particolare sono state condotte due operazioni:
• Sincronozzazione epoche iniziali e finali: sono stati fatti partire
tutti e tre i file di osservazione dalla stessa epoca, corrispondente all’i-
stante in cui e stato acceso l’ultimo ricevitore, e fatti finire nel medesimo
tempo, istante in cui e stato spento il primo ricevitore. In questo modo,
i file di osservazione dei tre GPS hanno tutti la stessa epoca di inizio
e di fine. Quindi, a meno di momenti di interruzione del segnale, il
numero di epoche totali del file dovrebbe risultare coincidente.
• Eliminazione epoche di non ricezione: le epoche di non ricezione
sono gli istanti in cui i GPS non ricevono il segnale, generando un’in-
terruzione nel file delle osservazioni, o, piu esattamente un salto tra le
epoche. Identificate tali interruzioni, per le epoche corrispondenti so-
no state cancellate anche le coordinate elaborate dai GPS che avevano
ricevuto bene il segnale.
Il passaggio descritto sopra ha portato alla creazione di un foglio di lavoro
Excel in cui ad ogni singola epoca corrispondono le diverse coordinate rilevate
dai tre GPS.
3.3.2 Tracciamento dei grafici della distanza dei rice-
vitori
Come indicatori della precisione del software di elaborazione, sono stati
tracciati dei grafici che riportano l’andamento delle reciproche distanze tra
i ricevitori nel tempo. In aggiunta sono stati graficati anche il PDOP e
il numero di satelliti visibili, al fine di spiegare eventuali discontinuita o
imprevisti nell’andamento delle curve di distanza.

3.3 Elaborazione sulle distanze tra i ricevitori nel tempo 23
Figura 3.5: Andamento delle distanze tra le antenne GPS installate sulla
barca e dei valori del numero di satelliti
Dai grafici e possibile notare che le distanze stimate tra i ricevitori, seb-
bene siano fisicamente costanti nel tempo, variano in funzione del numero
di satelliti visibili, dei disturbi atmosferici e delle condizioni di navigazione
dell’imbarcazione.
In particolare sono evidenti salti e discontinuita considerevoli, dell’ordine an-
che di qualche metro, negli istanti riconducibili a virate o a variazioni dell’
andamento della barca. In tali momenti i ricevitori hanno osservato un basso
numero di satelliti in condizioni di alto PDOP di disturbo (quindi disturbo
elevato). E possibile notare infatti tre grandi salti nel valore delle distanze,
collocati approssimativamente nelle stesse epoche per tutti e tre i ricevitori.
Essendo l’approccio del VADASE variamotrico (ovvero si necessitano os-
servazioni per epoche consecutive), e fisiologico che nei momenti di inter-
ruzione nel segnale esistano discontinuita. Tuttavia questa analisi e stata

3.3 Elaborazione sulle distanze tra i ricevitori nel tempo 24
Figura 3.6: Andamento delle distanze tra le antenne GPS installate sulla
barca e dei valori del PDOP
eseguita per avere una prima stima della qualita della ricezione nelle diverse
situazioni di acquisizione.
Capitolo 4
Confronto elaborazione
VADASE ed LGO
Il Kin-VADASE e uno software di recente realizzazione, e per questo e
stato posto il problema di determinare la sua precisione.
A tal scopo sono state confrontate le soluzioni del Kin-VADASE con quelle
elaborate attraverso il software Laica Geomatic Office (LGO), considerate
soluzioni di riferimento. E stata calcolata la differenza tra i risultati delle
due elaborazioni, quindi alcuni caratteristici parametri statistici quali media,
deviazione standard ed RMS.
4.1 Elaborazione LGO
Il software LGO stima, con precisione variabile da pochi centimetri al
decimetro, le coordinate dei ricevitori GPS attraverso le differenze doppie,
e quindi con l’ausilio di dati registrati da una stazione di riferimento. Nel
nostro caso e stata presa in considerazione la stazione permanente di Civi-
tavecchia, distante pochi chilometri dal porto di Traiano in cui e ormeggiata
l’imbarcazione. Quindi sono stati forniti al software i dati registrati dalla
suddetta stazione, insieme alle coordinate di quest’ultima.
25

4.1 Elaborazione LGO 26
La base teorica di elaborazione del software LGO e il concetto delle
doppie differenze. Senza dilungarsi troppo sull’equazione analitica che re-
gola questo calcolo, si vuole dare solo una breve spiegazione del metodo di
elaborazione attraverso il quale si stimano le coordinate di un punto mediante
l’ausilio di una stazione permanente.
Attraverso questo approccio non vengono stimate direttamente le coor-
dinate di un punto, bensı la base, o vettore, tra tale punto e un altro punto
dello spazio. Questo vettore ha percio bisogno di un punto di riferimen-
to di coordinate note (materializzato dalla stazione permanente) per essere
esattamente collocato all’interno di un sistema di riferimento [1].
Figura 4.1: Base GPS stimata con il metodo delle doppie differenze

4.2 Precisione del Kin-VADASE 27
4.2 Precisione del Kin-VADASE
Il seguente paragrafo riporta le operazoni effettuate per ricavare, a partire
dalle elaborazioni Kin-VADASE e LGO dei dati GPS, parametri statistici in
grado di quantificare la precisione del Kin-VADASE.
A tal scopo e stato utilizzato un foglio di calcolo Excel al fine di ripor-
tare in tabelle i dati elaborati dai diversi strumenti. Per ogni epoca e stata
calcolata la differenza tra le due soluzioni dopo averle sincronizzate. In par-
ticolare e stato studiato l’andamento delle differenze nel punto medio dei
tre ricevitori, considerato come punto rappresentativo della posizione della
barca.
Tuttavia nel calcolo delle coordinate del suddetto punto e emersa un’a-
nomalia nell’elaborazione LGO dei dati acquisiti dal GPS di prua, collocato
nella tuga. Infatti, mentre le elaborazioni LGO dei due ricevitori di poppa
hanno rilevato una sola interruzione di qualche secondo, il ricevitore interno
alla tuga, situato in una posizione piu coperta e quindi disturbata, ha cumu-
lato salti di elaborazione di circa dieci minuti.
Gli Indici di completezza (definiti come il rapporto tra in numero di so-
luzioni reali e quelle ipotetiche) riportati nella tabella 4.1 mostrano la man-
canza di circa il 5% delle soluzioni nell’elaborazione LGO del GPS collocato
in prua. Questo risultato ci porta ad affermare che in condizioni di segnale
POPPA DX POPPA SN PRUA
VADASE 1.000 1.000 1.000
LGO 0.999 1.000 0.952
Tabella 4.1: Indici di completezza per le elaborazioni VADASE e LGO dei
tre ricevitori
disturbato, e quindi ricezione non ottimale, il software VADASE riesce ad
elaborare i dati restituendo le posizioni dei ricevitori, mentre l’elaborazione
LGO risulta frammentata.

4.2 Precisione del Kin-VADASE 28
Pertanto, nella stima del punto medio tra i ricevitori, sia per quanto
riguarda l’elaborazione Kin-VADASE che LGO, non sono stati considerati
i dati acquisiti dal ricevitore di prua, bensı soltanto da quelli acquisiti dai
ricevitori di poppa.
4.2.1 Differenza Kin-VADASE-LGO in coordinate car-
tesiane geocentriche
Il confronto e stato eseguito calcolando la differenza (in metri) epoca
per epoca delle soluzioni fornite dai due software, dapprima in coordinate
cartesiane geocentriche XYZ, e successivamente riferite ad un sistema di ri-
ferimento locale (Est, Nord, Up) originato nel punto medio tra i ricevitori di
poppa. La figura 4.2 mostra l’andamento della differenza tra l’elaborazione
Kin-VADASE ed LGO nelle tre componenti XYZ.
Come si puo facilmente notare, il confronto ha portato ad un risultato
significativamente positivo per quanto riguarda la precisione dell’approccio
variometrico VADASE: dal confronto le soluzioni restituite dal Kin-VADASE
risultano comprese in un intorno di 1.5 metri delle soluzioni di riferimento.
Nella tabella 4.2 sono riportati i parametri statistici del confronto in
coordinate cartesiane geocentriche.
X [m] Y [m] Z [m]
Media 0.118 0.008 -0.405
Dev. standard 0.234 0.272 0.435
RMS 0.362 0.272 0.594
Tabella 4.2: Parametri statistici delle differenze tra elaborazione
Kin-VADASE e LGO in coordinate cartesiane geocentriche
L’RMS sulle tre componenti da un indicazione dell’accuratezza delle so-
luzioni ottenute con il Kin-VADASE, risultante dell’ordine di grandezza di

4.2 Precisione del Kin-VADASE 29
Figura 4.2: Andamento differenza elaborazione Kin-VADASE e LGO nel
tempo in coordinate cartesiane geocentriche XYZ
circa mezzo metro.
In particolare dalla 4.2 emerge che vale circa 36 cm per la componente X, 27
cm per la componente Y, e 59 cm per la componente Z.
4.2.2 Differenza tra Kin-VADASE e LGO in coordina-
te cartesiane locali
Il confronto tra le elaborazioni Kin-VADASE e LGO, per poter meglio
evidenziare il comportamento in planimetria ed in quota, e stato successi-
vamente riferito ad un sistema cartesiano locale Est, Nord e Up. Ricordiamo
che il sistema di riferimento locale ha l’asse z (componente Up) diretto come

4.2 Precisione del Kin-VADASE 30
la normale all’ellossoide passante per il punto, e assi x e y diretti lungo le
direzioni Nord ed Est.
Per la trasformazione tra i due sistemi di coordinate e stato necessario il cal-
colo della direzione della normale nel punto di applicazione, e la longitudine
e la latitudine di tale punto (λ e φ).
A partire da questi dati, attraverso la matrice di rotazione tra sistemi di
riferimento, calcoliamo la differenza dell’elaborazione cinematica VADASE
dalla traiettoria di riferimento in coordinate locali Est, Nord e Up.
Figura 4.3: Andamento della differenza tra elaborazione Kin-VADASE e
LGO nel tempo in coordinate cartesiane locali
Dal grafico in figura 4.3 vediamo che gli andamenti nel tempo delle compo-
nenti del vettore differenza nel sistema locale sono differenti rispetto a quelli
in coordinate geocentriche (4.2). Tuttavia, come ci potevamo aspettare visto
che l’operazione effettuata e stata soltanto una rotazione, il Kin-VADASE

4.2 Precisione del Kin-VADASE 31
restituisce risultati che si posizionano in un intorno di circa un metro dell’e-
laborazione standard.
Sono state quindi calcolate media, deviazione standard ed RMS delle diffe-
renze nel sistema di riferimento locale, riportate nella tabella 4.3:
Est [m] Nord [m] Up [m]
Media -0.016 .0.379 -0.185
Dev. standard 0.333 0.292 0.429
Rms 0.334 0.478 0.467
Tabella 4.3: Parametri statistici delle differenze tra elaborazione VADASE e
LGO in coordinate cartesiane locali
I valori numerici dell’rms sono di circa 33 cm per la componente Est, 46
cm per la componente Nord, e 46 cm per la componente UP.
Sempre dal grafico in figura 4.3 notiamo che la componente con il valore
di differenza maggiore e la componente Up. Questo risultato e una dimo-
strazione di quanto gia noto riguardo la precisione delle elaborazioni dei dati
GPS: la precisione in quota e minore che in planimetria.
La media e l’RMS delle differenze nelle tre direzioni sono dell’ordine di al-
cuni decimetri, risultato significativo essendo il Kin-VADASE uno strumento
variometrico che restituisce soluzioni senza l’ausilio di una stazione di rife-
rimento permanente. Ad avvalorare il risultato ottenuto si consideri il fatto
che i ricevitori GPS comunemente installati a bordo di veicoli (terrestri, aerei
e marittimi) restituiscono le posizioni con una precisione di alcuni metri.

Capitolo 5
Conclusioni
Il lavoro di tesi e stato condotto all’interno del progetto Roma Ocean
World, un’iniziativa che prevede l’esecuzione di un giro del mondo effettuato
in barca a vela, in solitario e in completa autonomia energetica ad alimentare,
realizzato con un Class40 dallo skipper Matteo Miceli.
Della strumentazione installata sull’imbarcazione fanno parte tre ricevitori
GPS ad alta precisione: il fine a lungo termine del progetto e quello di
studiare, mediante la ricostruzione dell’inclinazione e della posizione della
barca nel tempo, le onde di vento e quelle oceaniche incontrate durante la
navigazione.
Questa trattazione si colloca nella fase preliminare del progetto Roma
Ocean World, durante la quale sono state condotte prove e analisi al fine
di ricercare una strategia innovativa con la quale elaborare i dati GPS che
saranno acquisiti nel corso di tutta la traversata.
La ricerca e stata effettuate tenendo conto delle particolare condizioni di ac-
quisizione dei dati. I ricevitori GPS infatti acquisiranno dati lontano dalle
coste e quindi dalle stazioni di riferimento, situazione in condizioni in cui i
software di elaborazione differenziali sarebbero erronei e poco appropriati.
L’algoritmo utilizzato in questa trattazione per l’elaborazione dei dati
GPS, il Kin-VADASE, e un’estensione realizzata nel settembre 2014 del soft-
32

33
ware VADASE sviluppato dall’ Area di Geodesia e Geomatica del DICEA
e brevettato dall’Universita La Sapienza di Roma. Impiegato per la prima
volta nel posizionamento cinematico, il VADASE e un software in grado di
stimare le coordinate di un ricevitore stand alone in qualsiasi punto della
superficie terrestre.
In questa trattazione, tramite il Kin-VADASE, sono stati elaborati i dati
acquisiti dai tre ricevitori GPS durante i mesi precedenti la partenza della
barca.
E stata sviluppata una metodologia preliminare che, partendo dall’estra-
zione dei dati dalle schede di memoria, consente l’analisi dei dati GPS fino alla
stima delle coordinate dei ricevitori. Tale procedura di pre-trattazione dei
dati verra in seguito applicata a fine navigazione, quando saranno disponibili
le osservazioni effettuate nei cinque mesi di acquisizione vera e propria.
I dati registrati dai ricevitori sono stati quindi elaborati dal Kin-VADASE,
e, per valutarne la precisione, e stato effettuato un confronto con una soluzio-
ne di riferimento. Questa e stata ottenuta attraverso un approccio differen-
ziale implementato nel software Leica Geomatic Office, al quale e stata fornita
come stazione di riferimento quella permanente di Civitavecchia. Precisiamo
che la metodologia di elaborazione del software LGO, seppure efficiente, non
potra essere quella definitiva, da applicarsi per la navigazione in giro per il
mondo, dal momento che non si avranno a disposizione stazioni di riferimento
permanenti rispetto alle quali elaborare i dati.
Il confronto e stato condotto sui dati acquisiti durante una navigazione
della durata di circa 2 ore, effettuata nei pressi del porto di Traiano nel set-
tembre 2014.
Un primo risultato dell’analisi e stato il seguente: relativamente al ricevi-
tore di prua (ubicato nella tuga della barca) l’elaborazione LGO ha un basso
indice di completezza, dal momento che risente in maniera significativa della
presenza di cycle slip (interruzione del segnale) e di epoche con un basso
numero di satelliti visibili. Al contrario questo problema non va ad impatta-

34
re significativamente le soluzioni del VADASE, in quanto, anche per epoche
disturbate, l’algoritmo variometrico restituisce soluzioni accettabili.
Il confronto tra l’elaborazione VADASE e LGO e stato eseguito sulla po-
sizione del punto medio dei ricevitori di poppa, stimando un valore RMS (in-
dicazione dell’accuratezza delle soluzioni ottenute) delle differenze tra le due
soluzioni in un sistema di riferimento geocentrico. La precisione e risultata
di qualche decimetro, variabile nelle tre componenti X, Y e Z.
Per poter meglio evidenziare il comportamento in planimetria ed in quota,
il confronto e stato successivamente riferito ad un sistema cartesiano locale
Est, Nord e Up. I valori ottenuti di RMS anche in questo caso sono variabili
in un intorno di circa 40 cm. Inoltre, dal grafico riportante l’andamento delle
differenze Est, Nord e Up nel tempo, emerge che la componente con il valore
di differenza maggiore e la componente Up. Questo risultato e una dimo-
strazione di quanto gia noto riguardo la precisione delle elaborazioni dei dati
GPS, ovvero che la precisione in quota e minore di quella in planimetria.
La media e l’RMS delle differenze nelle tre direzioni sono dell’ordine di alcu-
ni decimetri, risultato significativo essendo il Kin-VADASE uno strumento
variometrico che restituisce soluzioni senza l’ausilio di una stazione di rife-
rimento permanente. Ad avvalorare il risultato ottenuto si consideri il fatto
che i ricevitori GPS comunemente installati a bordo di veicoli (terrestri, aerei
e marittimi) restituiscono le posizioni con una precisione di alcuni metri.
I significativi risultati ottenuti hanno portato all’effettiva individuazio-
ne di una metodologia di analisi dei dati GPS: attraverso l’elaborazione
variometrica VADASE e stato stabilito un iter di procedimento, che a se-
guito del completamento della traversata effettuata dall’imbarcazione Eco
40 e dell’acquisizione complessiva dei dati, portera ad ottenere le coordinate
dell’imbarcazione, con precisione al decimetro, in ogni istante di navigazione.

Bibliografia
35

Bibliografia
[1] Biagi, Ludovico (2009), I fondamenti del GPS, Geomatics Workbooks.
[2] M. Branzanti, G. Colosimo, M. Crespi, A. Mazzoni (2012), GPS
Near Real Time Coseismic Displacements for the Great Tohoku oki
Earthquake, IEEE Geoscience and Remote Sensing Letter.
[3] Sito ufficiale di Matteo Miceli, www.matteomiceli.com.
[4] Tracking Eco40, www.sgstracking.com/live/romaoceanworld2014.php.
[5] NASA.gov, ftp://cddis.gsfc.nasa.gov/gnss/data/daily/2014/brdc/.
36


















