Alexander Litvinenko, Quanti cation Center, KAUST · PDF fileFast and cheap approximation of...
54
Fast and cheap approximation of large covariance matrices by the hierarchical matrix technique Alexander Litvinenko, Extreme Computing Research Center and Uncertainty Quantification Center, KAUST (joint work with M. Genton, Y. Sun and D. Keyes) Center for Uncertainty Quantification http://sri-uq.kaust.edu.sa/
-
Upload
doannguyet -
Category
Documents
-
view
221 -
download
1
Transcript of Alexander Litvinenko, Quanti cation Center, KAUST · PDF fileFast and cheap approximation of...
Fast and cheap approximation of large covariancematrices by the hierarchical matrix technique
Alexander Litvinenko,Extreme Computing Research Center and Uncertainty
Quantification Center, KAUST(joint work with M. Genton, Y. Sun and D. Keyes)
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
http://sri-uq.kaust.edu.sa/

4*
The structure of the talk
1. Hierarchical matrices [Hackbusch 1999]: Low-rank matrices,cluster tree, block cluster tree and admissibility condition, costand storage, (www.hlib.org)
2. Matern covariance function
3. Uncertain parameters of the covariance function:
3.1 Uncertain covariance length3.2 Uncertain smoothness parameter
4. Identification of these parameters via maximizing thelog-likelihood.
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
2 / 54
4*
Motivation for H-matrices
Ax = b
Iterative methods: Jacobi, Gauss- Seidel, SOR, ...Complexity O(#iters · n) or O(#iters · n2), number of iteration isproportional to
√cond(A).
Direct solvers: Gaussian elimination, domain decompositions, LU,...Cost of A−1 is O(n3)
If A is structured (diagonal, Toeplitz, circulant) then can apply e.g.FFT with O(nlogn), but if not ?What if you need not only x = A−1b, but f (A)(e.g. A−1, expA, sinA, signA, ...)?
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
3 / 54
4*
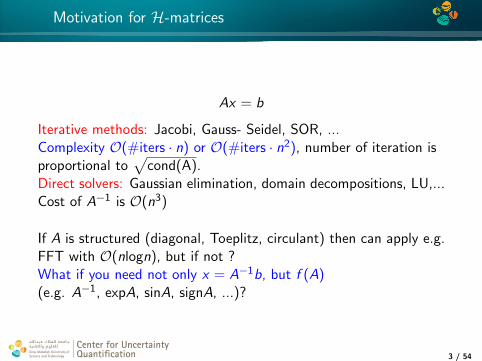
Storage and complexity (p-proc. on shared mem.)
Operation Sequential Compl. Parallel Complexity(R.Kriemann 2005)
building(M) N = O(nlogn) Np +O(|V (T )\L(T )|)
storage(M) N = O(knlogn) N
Mx N = O(knlogn) Np + n√
p
αM ′ ⊕ βM ′′ N = O(k2nlogn) Np
αM ′ M ′′ ⊕ βM N = O(k2nlog2n) Np +O(Csp(T )|V (T )|)
M−1 N = O(k2nlog2n) Np +O(nn2
min)
LU N = O(k2nlog2n) N
H-LU N = O(k2nlog2n) Np +O(k
2nlog2n
n1/d )
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
4 / 54

4*
Matern function for different parameters
[Whittle’63, D. Simpson, Finn Lindgren, Havard Rue, D. Bolin,...]
−2 −1.5 −1 −0.5 0 0.5 1 1.5 20
0.05
0.1
0.15
0.2
0.25
Matern covariance (nu=1)
σ=0.5, l=0.5
σ=0.5, l=0.3
σ=0.5, l=0.2
σ=0.5, l=0.1
−2 −1.5 −1 −0.5 0 0.5 1 1.5 20
0.05
0.1
0.15
0.2
0.25
nu=0.15
nu=0.3
nu=0.5
nu=1
nu=2
nu=30
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
5 / 54
4*
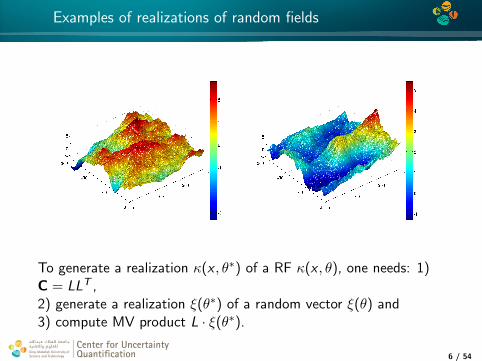
Examples of realizations of random fields
To generate a realization κ(x , θ∗) of a RF κ(x , θ), one needs: 1)C = LLT ,2) generate a realization ξ(θ∗) of a random vector ξ(θ) and3) compute MV product L · ξ(θ∗).
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
6 / 54
4*
Hierarchical (H)-matrices
Introduction into Hierarchical (H)-matrix technique
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
7 / 54
4*
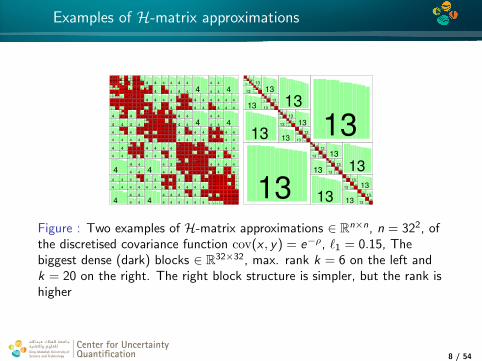
Examples of H-matrix approximations
25 20
20 20
20 16
20 16
20 20
16 16
20 16
16 16
4 4
20 4 32
4 4
16 4 32
4 20
4 4
4 16
4 4
32 32
20 20
20 20 32
32 32
4 3
4 4 32
20 4
16 4 32
32 4
32 32
4 32
32 32
32 4
32 32
4 4
4 4
20 16
4 4
32 32
4 32
32 32
32 32
4 32
32 32
4 32
20 20
20 20 32
32 32
32 32
32 32
32 32
32 32
32 32
32 32
4 44 4
20 4 32
32 32 4
4 4
32 4
32 32 4
4 4
32 32
4 32 4
4 4
32 32
32 32 4
4
4 20
4 4 32
32 32
4 4
432 4
32 32
4 4
432 32
4 32
4 4
432 32
32 32
4 4
20 20
20 20 32
32 32
4 4
20 4 32
32 32
4 20
4 4 32
32 32
20 20
20 20 32
32 32
32 4
32 32
32 4
32 32
32 4
32 32
32 4
32 32
32 32
4 32
32 32
4 32
32 32
4 32
32 32
4 32
32 32
32 32
32 32
32 32
32 32
32 32
32 32
32 32
4 4
4 4 44 4
20 4 32
32 32
32 4
32 32
4 32
32 32
32 4
32 32
4 4
4 4
4 4
4 4 4
4 4
32 4
32 32 4
4 4
4 4
4 4
4 4 4
432 4
32 32
4 4
4 4
4 4
4 4
4 4 432 4
32 32
32 4
32 32
32 4
32 32
32 4
32 32
4 4
4 4
4 4
4 4
4 20
4 4 32
32 32
4 32
32 32
32 32
4 32
32 32
4 32
44 4
4 4
4 4
4 4
4 4
32 32
4 32 4
44 3
4 4
4 4
4 4
432 32
4 32
4 4
44 4
4 4
4 4
4 4
32 32
4 32
32 32
4 32
32 32
4 32
32 32
4 32
44 4
4 4
20 20
20 20 32
32 32
32 32
32 32
32 32
32 32
32 32
32 32
4 4
20 4 32
32 32
32 4
32 32
4 32
32 32
32 4
32 32
4 20
4 4 32
32 32
4 32
32 32
32 32
4 32
32 32
4 32
20 20
20 20 32
32 32
32 32
32 32
32 32
32 32
32 32
32 32
4 4
32 32
32 32 4
4 4
32 4
32 32 4
4 4
32 32
4 32 4
4 4
32 32
32 32 4
432 32
32 32
4 4
432 4
32 32
4 4
432 32
4 32
4 4
432 32
32 32
4 4
32 32
32 32
32 32
32 32
32 32
32 32
32 32
32 32
32 4
32 32
32 4
32 4
32 4
32 32
32 4
32 4
32 32
4 32
32 32
4 32
32 32
4 4
32 32
4 4
32 32
32 32
32 32
32 32
32 32
32 32
32 32
32 32
25 11
11 20 12
1320 11
9 1613
13
20 11
11 20 13
13 3213
13
20 8
10 20 13
13 32 13
1332 13
13 32
13
13
20 11
11 20 13
13 32 13
13
20 10
10 20 12
12 3213
13
32 13
13 32 13
1332 13
13 32
13
13
20 11
11 20 13
13 32 13
1332 13
13 3213
13
20 9
9 20 13
13 32 13
1332 13
13 32
13
13
32 13
13 32 13
1332 13
13 3213
13
32 13
13 32 13
1332 13
13 32
Figure : Two examples of H-matrix approximations ∈ Rn×n, n = 322, ofthe discretised covariance function cov(x , y) = e−ρ, `1 = 0.15, Thebiggest dense (dark) blocks ∈ R32×32, max. rank k = 6 on the left andk = 20 on the right. The right block structure is simpler, but the rank ishigher
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
8 / 54
4*
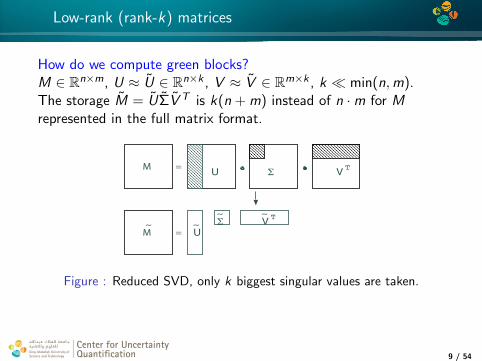
Low-rank (rank-k) matrices
How do we compute green blocks?M ∈ Rn×m, U ≈ U ∈ Rn×k , V ≈ V ∈ Rm×k , k min(n,m).The storage M = UΣV T is k(n + m) instead of n ·m for Mrepresented in the full matrix format.
VU ΣT=M
UVΣ∼
∼ ∼ T
=M∼
Figure : Reduced SVD, only k biggest singular values are taken.
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
9 / 54
4*
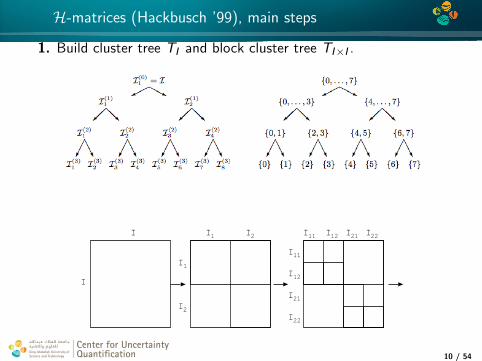
H-matrices (Hackbusch ’99), main steps
1. Build cluster tree TI and block cluster tree TI×I .
I
I
I I
I
I
I I I I1
1
2
2
11 12 21 22
I11
I12
I21
I22
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
10 / 54
4*
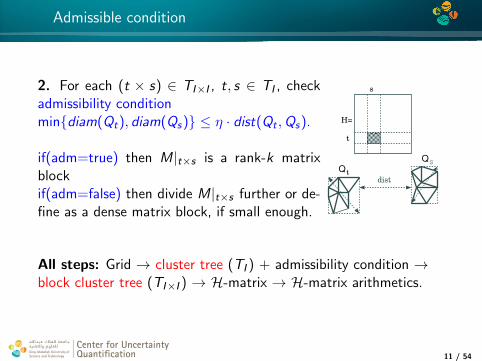
Admissible condition
2. For each (t × s) ∈ TI×I , t, s ∈ TI , checkadmissibility conditionmindiam(Qt), diam(Qs) ≤ η · dist(Qt ,Qs).
if(adm=true) then M|t×s is a rank-k matrixblockif(adm=false) then divide M|t×s further or de-fine as a dense matrix block, if small enough.
Q
Qt
S
dist
H=
t
s
All steps: Grid → cluster tree (TI ) + admissibility condition →block cluster tree (TI×I ) → H-matrix → H-matrix arithmetics.
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
11 / 54
4*
H-Matrix Approximation of BEM Matrix
Consider the following 1D integral equation (www.hlib.org)∫ 1
0log|x − y |U(y)dy = F (x), x ∈ (0, 1).
After discretisation by Galerkin’s method,Vn := spanφ0, ..., φn−1, Un :=
∑n−1j=0 ujφj .
Gu = f , Gij :=
∫ 1
0
∫ 1
0φi (x)log|x − y |φj(y)dydx , fi :=
∫ 1
0φi (x)F (x)dx .
(1)
log|x − y | ≈ g(x , y) =k−1∑ν=0
gν(x)hν(y). (2)
Gij :=
∫ 1
0
∫ 1
0φi (x)
k−1∑ν=0
gν(x)hν(y)φj(y)dydx .
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
12 / 54
4*
H-matrix for BEM
Gij :=k−1∑ν=0
(
∫ 1
0φi (x)gν(x)dx)(
∫ 1
0hν(y)φj(y)dy).
Now, all admissible blocks G |(t,s) can be represented in the form
G |(t,s) = ABT , A ∈ R|t|×k , B ∈ R|s|×k ,
where the entries of the factors A and B are
Aiν :=
∫ 1
0φi (x)gν(x)dx , Bjν :=
∫ 1
0φj(y)hν(y)dy .
We use the fact that the basis functions are local and obtain for allinadmissible blocks:
Gij :=
∫ (i+1)/n
i/n
∫ (j+1)/n
j/nlog|x − y |dydx .
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
13 / 54
4*
Numerical experiments with H-matrices
Computing time, storage of an H-matrixapproximation of a covariance matrix
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
14 / 54
4*
H - Matrices, storage and computing time
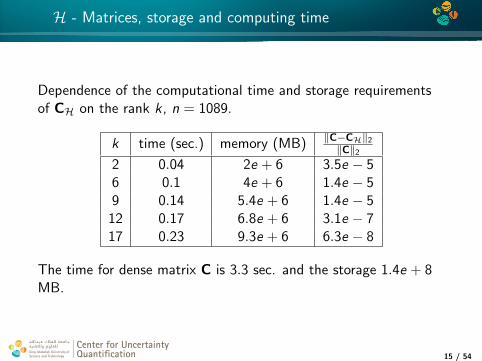
Dependence of the computational time and storage requirementsof CH on the rank k , n = 1089.
k time (sec.) memory (MB) ‖C−CH‖2
‖C‖2
2 0.04 2e + 6 3.5e − 56 0.1 4e + 6 1.4e − 59 0.14 5.4e + 6 1.4e − 5
12 0.17 6.8e + 6 3.1e − 717 0.23 9.3e + 6 6.3e − 8
The time for dense matrix C is 3.3 sec. and the storage 1.4e + 8MB.
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
15 / 54
4*
H - Matrices, dependence on cov. lengths
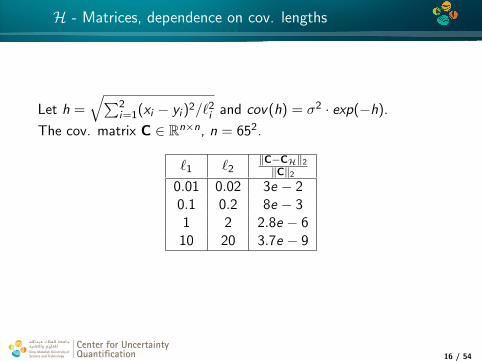
Let h =√∑2
i=1(xi − yi )2/`2i and cov(h) = σ2 · exp(−h).
The cov. matrix C ∈ Rn×n, n = 652.
`1 `2‖C−CH‖2
‖C‖2
0.01 0.02 3e − 20.1 0.2 8e − 31 2 2.8e − 6
10 20 3.7e − 9
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
16 / 54
4*
Memory and computational times
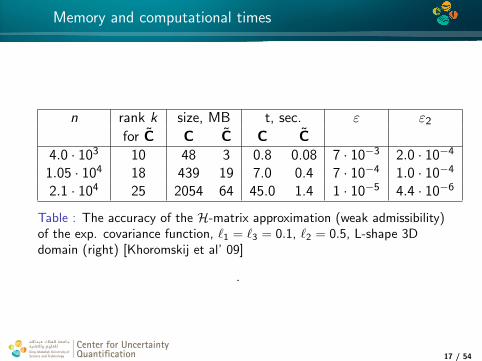
n rank k size, MB t, sec. ε ε2
for C C C C C4.0 · 103 10 48 3 0.8 0.08 7 · 10−3 2.0 · 10−4
1.05 · 104 18 439 19 7.0 0.4 7 · 10−4 1.0 · 10−4
2.1 · 104 25 2054 64 45.0 1.4 1 · 10−5 4.4 · 10−6
Table : The accuracy of the H-matrix approximation (weak admissibility)of the exp. covariance function, `1 = `3 = 0.1, `2 = 0.5, L-shape 3Ddomain (right) [Khoromskij et al’ 09]
.
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
17 / 54
4*
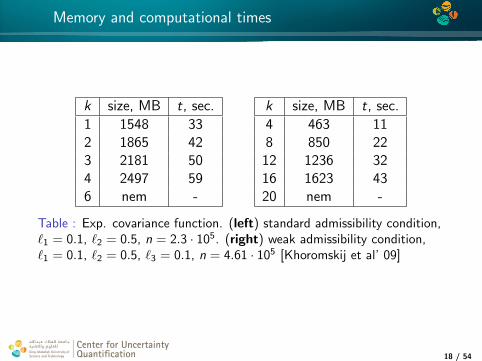
Memory and computational times
k size, MB t, sec.
1 1548 332 1865 423 2181 504 2497 596 nem -
k size, MB t, sec.
4 463 118 850 22
12 1236 3216 1623 4320 nem -
Table : Exp. covariance function. (left) standard admissibility condition,`1 = 0.1, `2 = 0.5, n = 2.3 · 105. (right) weak admissibility condition,`1 = 0.1, `2 = 0.5, `3 = 0.1, n = 4.61 · 105 [Khoromskij et al’ 09]
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
18 / 54

4*
Time and storage cost on the problem size n
time (sec.) memory (MB)
n C C C C ε
332 0.14 0.01 9.5 0.7 4.3 · 10−3
652 2.6 0.05 1.4 · 102 3.5 3.7 · 10−3
1292 −− 0.24 nem 16 −−2572 −− 1 nem 64 −−
Table : Dependence of the computational time and storage cost on theproblem size n, rank k = 5, cov(x , y) = e−ρ, `1 = `2 = 1, domainG = [0, 1]2.
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
19 / 54
4*
Identifying uncertain parameters
It was an additional materialLet us come to the main topic:Identifying uncertain parameters
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
20 / 54
4*
Identifying uncertain parameters
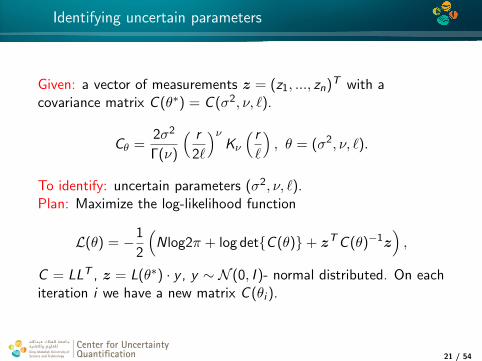
Given: a vector of measurements z = (z1, ..., zn)T with acovariance matrix C (θ∗) = C (σ2, ν, `).
Cθ =2σ2
Γ(ν)
( r
2`
)νKν
( r
`
), θ = (σ2, ν, `).
To identify: uncertain parameters (σ2, ν, `).Plan: Maximize the log-likelihood function
L(θ) = −1
2
(N log2π + log detC (θ)+ zTC (θ)−1z
),
C = LLT , z = L(θ∗) · y , y ∼ N (0, I )- normal distributed. On eachiteration i we have a new matrix C (θi ).
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
21 / 54
4*
Other works
1. S. AMBIKASARAN, et al., Fast direct methods for gaussian processes and the analysis of NASA Keplermission, arXiv:1403.6015, (2014).
2. S. AMBIKASARAN, J. Y. LI, P. K. KITANIDIS, AND E. DARVE, Large-scale stochastic linear inversionusing hierarchical matrices, Computational Geosciences, (2013)
3. J. BALLANI AND D. KRESSNER, Sparse inverse covariance estimation with hierarchical matrices, (2015).
4. M. BEBENDORF, Why approximate LU decompositions of finite element discretizations of ellipticoperators can be computed with almost linear complexity, (2007).
5. S. BOERM AND J. GARCKE, Approximating gaussian processes with H2-matrices, 2007.
6. J. E. CASTRILLON, M. G. GENTON, AND R. YOKOTA, Multi-Level Restricted Maximum LikelihoodCovariance Estimation and Kriging for Large Non-Gridded Spatial Datasets, (2015).
7. J. DOELZ, H. HARBRECHT, AND C. SCHWAB, Covariance regularity and H-matrix approximation forrough random fields, ETH-Zuerich, 2014.
8. H. HARBRECHT et al, Efficient approximation of random fields for numerical applications, NumericalLinear Algebra with Applications, (2015).
9. C.-J. HSIEH, et al, Big QUIC: Sparse inverse covariance estimation for a million variables, 2013
10. J. QUINONERO-CANDELA, et al, A unifying view of sparse approximate gaussian process regression,(2005).
11. A. SAIBABA, S. AMBIKASARAN, J. YUE LI, P. KITANIDIS, AND E. DARVE, Application of hierarchicalmatrices to linear inverse problems in geostatistics, Oil & Gas Science (2012).
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
22 / 54
4*
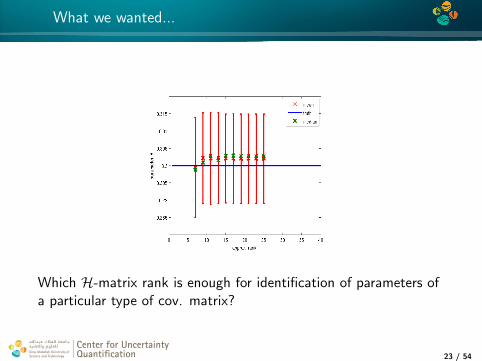
What we wanted...
Which H-matrix rank is enough for identification of parameters ofa particular type of cov. matrix?
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
23 / 54
4*
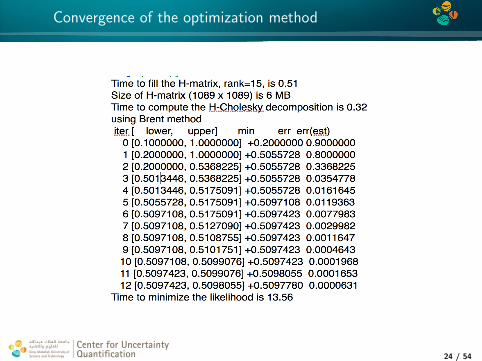
Convergence of the optimization method
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
24 / 54
4*
Details of the identification
To maximize the log-likelihood function we use the Brent’s method[Brent’73] (combining bisection method, secant method andinverse quadratic interpolation).
1. C (θ) ≈ CH(θ, k).
2. H-Cholesky: CH(θ, k) = LLT
3. zTC−1z = zT (LLT )−1z = vT · v , where v is a solution ofL(θ, k)v(θ) := z(θ∗).
4. Let λi be diagonal elements of H-Cholesky factor L, then
log detC = log detLLT = log detn∏
i=1
λ2i = 2
n∑i=1
logλi ,
L(θ, k) = −N
2log(2π)−
N∑i=1
logLii (θ, k) − 1
2(v(θ)T · v(θ)). (3)
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
25 / 54
0 10 20 30 40−4000
−3000
−2000
−1000
0
1000
2000
parameter θ, truth θ*=12
Log−
likelih
ood(θ
)
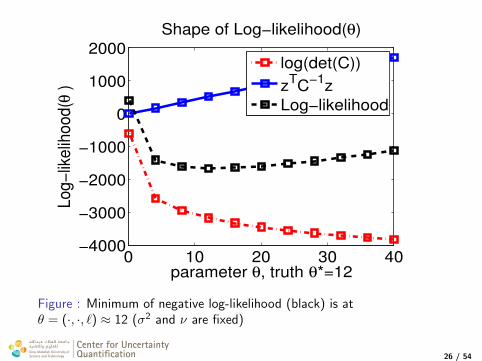
Shape of Log−likelihood(θ)
log(det(C))
zTC
−1z
Log−likelihood
Figure : Minimum of negative log-likelihood (black) is atθ = (·, ·, `) ≈ 12 (σ2 and ν are fixed)
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
26 / 54
4*
What will change?
Approximate C by CH
1. How the eigenvalues of C and CH differ ?
2. How det(C ) differs from det(CH) ?
3. How L differs from LH ?
4. How C−1 differs from (CH)−1 ?
5. How L(θ, k) differs from L(θ)?
6. What is optimal H-matrix rank?
7. How θH differs from θ?
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
27 / 54
4*
Remark
For a small H-matrix rank k the H-matrix Cholesky of CH can benot so stable when eigenvalues of C come very close to zero. Aremedy is to increase the rank k .In our example for n = 652 we increased k from 7 to 9.
To avoid this instability, we can modify CHm = CH + δ2I . Assumeλi are eigenvalues of CH. Then eigenvalues of CHm will be λi + δ2.
log det(CHm ) = logn∏
i=1
(λi + δ2) =n∑
i=1
log(λi + δ2). (4)
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
28 / 54
4*
Error analysis
Theorem (Existence of H-matrix inverse in [Bebendorf’11,Ballani, Kressner’14)
Under certain conditions an H-matrix inverse exist
‖C−1H − C−1‖ ≤ ε‖C−1‖, (5)
theoretical estimations for rank kinv of C−1H are given.
Theorem (Error in log det)
Let E := X − XH, (XH)−1E := (XH)−1X − I and for the spectralradius
ρ((XH)−1E ) = ρ((XH)−1X − I) ≤ ε < ε. (6)
Then|log det(X )− log det(XH)| ≤ −plog(1− ε). (7)
Proof: See [Ballani, Kressner 14], [Ipsen’05].Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
29 / 54
4*
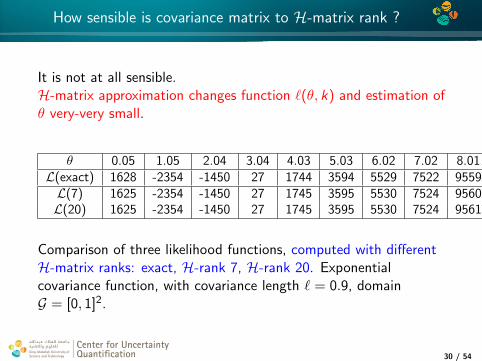
How sensible is covariance matrix to H-matrix rank ?
It is not at all sensible.H-matrix approximation changes function `(θ, k) and estimation ofθ very-very small.
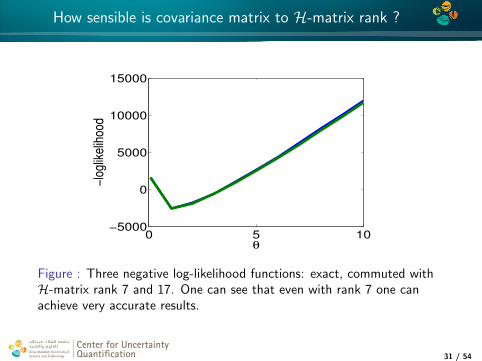
θ 0.05 1.05 2.04 3.04 4.03 5.03 6.02 7.02 8.01 9 10L(exact) 1628 -2354 -1450 27 1744 3594 5529 7522 9559 11628 13727L(7) 1625 -2354 -1450 27 1745 3595 5530 7524 9560 11630 13726L(20) 1625 -2354 -1450 27 1745 3595 5530 7524 9561 11630 13725
Comparison of three likelihood functions, computed with differentH-matrix ranks: exact, H-rank 7, H-rank 20. Exponentialcovariance function, with covariance length ` = 0.9, domainG = [0, 1]2.
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
30 / 54
4*
How sensible is covariance matrix to H-matrix rank ?
0 5 10−5000
0
5000
10000
15000
θ
−lo
glik
elih
ood
Figure : Three negative log-likelihood functions: exact, commuted withH-matrix rank 7 and 17. One can see that even with rank 7 one canachieve very accurate results.
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
31 / 54
4*
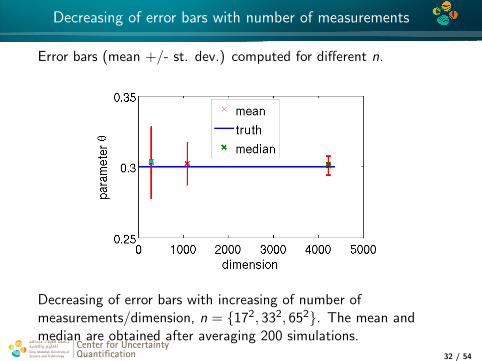
Decreasing of error bars with number of measurements
Error bars (mean +/- st. dev.) computed for different n.
Decreasing of error bars with increasing of number ofmeasurements/dimension, n = 172, 332, 652. The mean andmedian are obtained after averaging 200 simulations.
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
32 / 54

4*
Difference between two distributions, computed with C and CH
Kullback-Leibler divergence (KLD) DKL(P‖Q) is a measure of theinformation lost when distribution Q is used to approximate P:
DKL(P‖Q) =∑i
P(i) lnP(i)
Q(i), DKL(P‖Q) =
∫ ∞−∞
p(x) lnp(x)
q(x)dx ,
where p, q densities of P and Q. For multi-variate normaldistributions (µ0,Σ0) and (µ1,Σ1)
2DKL(N0‖N1) = tr(Σ−11 Σ0)+(µ1−µ0)TΣ−1
1 (µ1−µ0)−k− ln
(det Σ0
det Σ1
)
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
33 / 54
4*
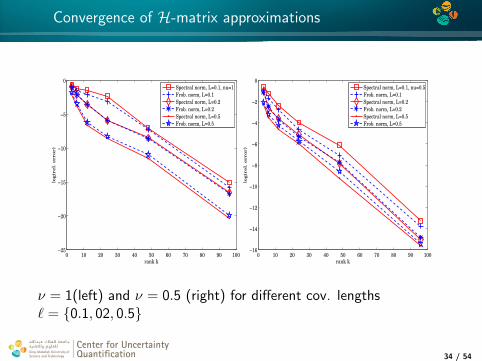
Convergence of H-matrix approximations
0 10 20 30 40 50 60 70 80 90 100−25
−20
−15
−10
−5
0
rank k
log(r
el.
error)
Spectral norm, L=0.1, nu=1
Frob. norm, L=0.1
Spectral norm, L=0.2
Frob. norm, L=0.2
Spectral norm, L=0.5
Frob. norm, L=0.5
0 10 20 30 40 50 60 70 80 90 100−16
−14
−12
−10
−8
−6
−4
−2
0
rank k
log(r
el.
error)
Spectral norm, L=0.1, nu=0.5
Frob. norm, L=0.1
Spectral norm, L=0.2
Frob. norm, L=0.2
Spectral norm, L=0.5
Frob. norm, L=0.5
ν = 1(left) and ν = 0.5 (right) for different cov. lengths` = 0.1, 02, 0.5
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
34 / 54
4*
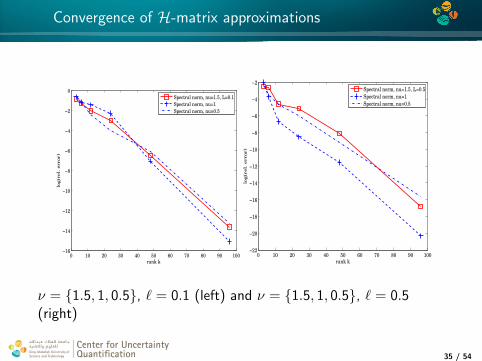
Convergence of H-matrix approximations
0 10 20 30 40 50 60 70 80 90 100−16
−14
−12
−10
−8
−6
−4
−2
0
rank k
log(r
el.
error)
Spectral norm, nu=1.5, L=0.1
Spectral norm, nu=1
Spectral norm, nu=0.5
0 10 20 30 40 50 60 70 80 90 100−22
−20
−18
−16
−14
−12
−10
−8
−6
−4
−2
rank k
log(r
el.
error)
Spectral norm, nu=1.5, L=0.5
Spectral norm, nu=1
Spectral norm, nu=0.5
ν = 1.5, 1, 0.5, ` = 0.1 (left) and ν = 1.5, 1, 0.5, ` = 0.5(right)
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
35 / 54
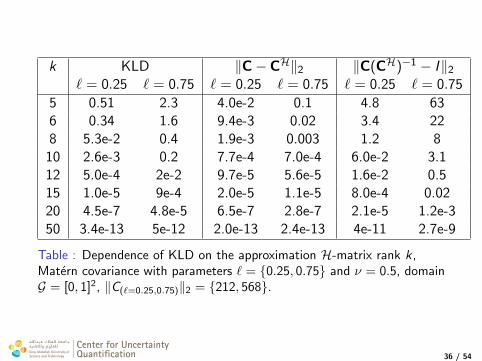
k KLD ‖C− CH‖2 ‖C(CH)−1 − I‖2
` = 0.25 ` = 0.75 ` = 0.25 ` = 0.75 ` = 0.25 ` = 0.75
5 0.51 2.3 4.0e-2 0.1 4.8 636 0.34 1.6 9.4e-3 0.02 3.4 228 5.3e-2 0.4 1.9e-3 0.003 1.2 8
10 2.6e-3 0.2 7.7e-4 7.0e-4 6.0e-2 3.112 5.0e-4 2e-2 9.7e-5 5.6e-5 1.6e-2 0.515 1.0e-5 9e-4 2.0e-5 1.1e-5 8.0e-4 0.0220 4.5e-7 4.8e-5 6.5e-7 2.8e-7 2.1e-5 1.2e-350 3.4e-13 5e-12 2.0e-13 2.4e-13 4e-11 2.7e-9
Table : Dependence of KLD on the approximation H-matrix rank k,Matern covariance with parameters ` = 0.25, 0.75 and ν = 0.5, domainG = [0, 1]2, ‖C(`=0.25,0.75)‖2 = 212, 568.
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
36 / 54
4*
Conclusion
I Covariance matrices can be approximated in H-matrix format.
I Influence of H-matrix approximation error on the estimatedparameters is small.
I With application of H-matricesI we extend the class of covariance functions to work with,I allows non-regular discretization of the covariance function on
large spatial grids.
I With the maximizing algorithm we are able to identify bothparameters: covariance lengths ` and the smoothness ν
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
37 / 54
4*
Future plans
I ECRC, center of D. Keyes: Parallel H-Cholesky on differentarchitectures → very large covariance matrices on complicategrids
I Apply H-matrices for
1. Kriging estimate s := CsyC−1yy y
2. Estimation of variance σ, is the diagonal of conditional cov.matrix Css|y = diag
(Css − CsyC−1
yy Cys
),
3. Gestatistical optimal design ϕA := n−1traceCss|y ,
ϕC := cT(Css − CsyC−1
yy Cys
)c ,
I Identify all three parameters (σ2, `, ν) simultaneously
I Compare with the Bayesian Update (H. Matthies, H. Najm,K. Law, A. Stuart et al)
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
38 / 54
4*
Literature
1. PCE of random coefficients and the solution of stochastic partialdifferential equations in the Tensor Train format, S. Dolgov, B. N.Khoromskij, A. Litvinenko, H. G. Matthies, 2015/3/11, arXiv:1503.032102. Efficient analysis of high dimensional data in tensor formats, M. Espig,W. Hackbusch, A. Litvinenko, H.G. Matthies, E. Zander Sparse Grids andApplications, 31-56, 40, 20133. Application of hierarchical matrices for computing the Karhunen-Loeveexpansion, B.N. Khoromskij, A. Litvinenko, H.G. Matthies, Computing84 (1-2), 49-67, 31, 20094. Efficient low-rank approximation of the stochastic Galerkin matrix intensor formats, M. Espig, W. Hackbusch, A. Litvinenko, H.G. Matthies,P. Waehnert, Comp. & Math. with Appl. 67 (4), 818-829, 2012
5. Numerical Methods for Uncertainty Quantification and Bayesian
Update in Aerodynamics, A. Litvinenko, H. G. Matthies, Book
”Management and Minimisation of Uncertainties and Errors in Numerical
Aerodynamics” pp 265-282, 2013
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
39 / 54
4*
Acknowledgement
1. Lars Grasedyck (RWTH Aachen) and Steffen Boerm (UniKiel) for HLIB (www.hlib.org)
2. KAUST Research Computing group, KAUST SupercomputingLab (KSL)
3. Stochastic Galerkin library (sglib from E. Zander). Type inyour terminalgit clone git://github.com/ezander/sglib.git
To initialize all variables, run startup.m You will find:generalised PCE, sparse grids, (Q)MC, stochastic Galerkin, linearsolvers, KLE, covariance matrices, statistics, quadratures(multivariate Chebyshev, Laguerre, Lagrange, Hermite ) etc
There are: many examples, many test, rich demos
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
40 / 54
4*
Additional information
Additional information
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
41 / 54
4*
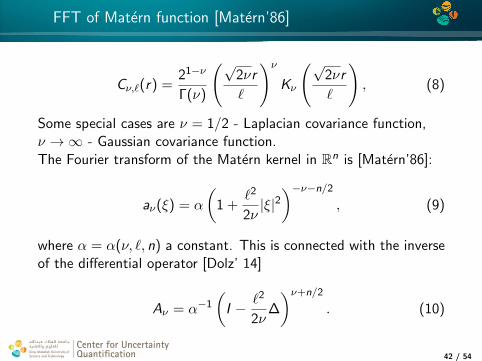
FFT of Matern function [Matern’86]
Cν,`(r) =21−ν
Γ(ν)
(√2νr
`
)νKν
(√2νr
`
), (8)
Some special cases are ν = 1/2 - Laplacian covariance function,ν →∞ - Gaussian covariance function.The Fourier transform of the Matern kernel in Rn is [Matern’86]:
aν(ξ) = α
(1 +
`2
2ν|ξ|2)−ν−n/2
, (9)
where α = α(ν, `, n) a constant. This is connected with the inverseof the differential operator [Dolz’ 14]
Aν = α−1
(I − `2
2ν∆
)ν+n/2
. (10)
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
42 / 54
4*
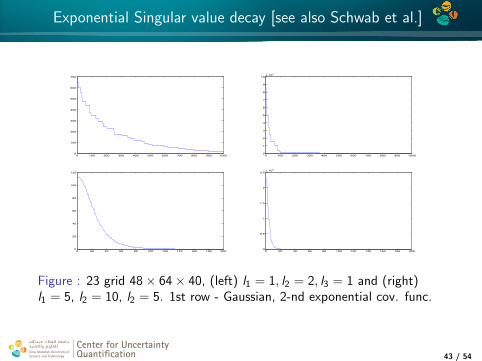
Exponential Singular value decay [see also Schwab et al.]
0 100 200 300 400 500 600 700 800 900 10000
100
200
300
400
500
600
700
0 100 200 300 400 500 600 700 800 900 10000
1
2
3
4
5
6
7
8
9
10x 10
4
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
100
120
0 20 40 60 80 100 120 140 160 180 2000
0.5
1
1.5
2
2.5x 10
4
Figure : 23 grid 48× 64× 40, (left) l1 = 1, l2 = 2, l3 = 1 and (right)l1 = 5, l2 = 10, l2 = 5. 1st row - Gaussian, 2-nd exponential cov. func.
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
43 / 54
4*
Where does the admissibility condition come from?
Let B1, B2 ⊂ Rd are compacts, and χ(x , y) is defined for(x , y) ∈ B1 × B2 with x 6= y .Let K be an integral operator with an asymptotic smooth kernel χin the domain B1 × B2:
(Kv)(x) =
∫B2
χ(x , y)v(y)dy (x ∈ B1).
Suppose that χ(k)(x , y) is an approximation of χ in B1 × B2 of theseparate form:
χ(k)(x , y) =k∑ν=1
ϕ(k)ν (x)ψ(k)
ν (y),
where k is the rank of separation.
Then ‖χ− χ(k)‖∞,B1×B2 ≤ c1
[c2 mindiam(B1),diam(B2)
dist(B1,B2)
]k.
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
44 / 54
4*
Other Applications
1. Matrix exponential allows us to solve ODEs
x(t) = Ax(t), x(0) = x0, → x(t) = exp(tA)x0
2. Other matrix function: use representation by the Cauchyintegral
f (A) =1
2πi
∮Γ
f (t)(A− tI )−1dt
and exponentially convergent quadrature rule [Hackbusch, TR
4/2005, MPI]
f (A) ≈k∑
j=1
wj f (tj)(A− tj I )−1
to obtain an approximation.
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
45 / 54
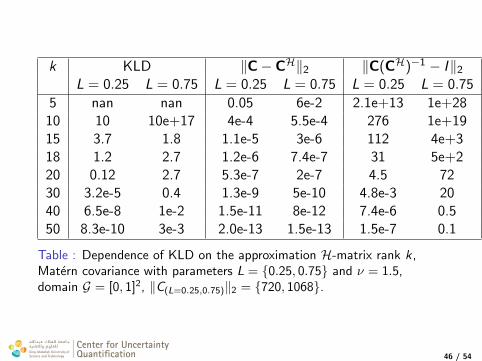
k KLD ‖C− CH‖2 ‖C(CH)−1 − I‖2
L = 0.25 L = 0.75 L = 0.25 L = 0.75 L = 0.25 L = 0.75
5 nan nan 0.05 6e-2 2.1e+13 1e+2810 10 10e+17 4e-4 5.5e-4 276 1e+1915 3.7 1.8 1.1e-5 3e-6 112 4e+318 1.2 2.7 1.2e-6 7.4e-7 31 5e+220 0.12 2.7 5.3e-7 2e-7 4.5 7230 3.2e-5 0.4 1.3e-9 5e-10 4.8e-3 2040 6.5e-8 1e-2 1.5e-11 8e-12 7.4e-6 0.550 8.3e-10 3e-3 2.0e-13 1.5e-13 1.5e-7 0.1
Table : Dependence of KLD on the approximation H-matrix rank k,Matern covariance with parameters L = 0.25, 0.75 and ν = 1.5,domain G = [0, 1]2, ‖C(L=0.25,0.75)‖2 = 720, 1068.
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
46 / 54
4*
Convergence of eigenvalues
Theorem (Harbrecht’ 15)
Let RF a ∈ Hp(D)⊗ L2(Ω). Then, the eigenvalue of thecovariance operator C : H−p(D)→ Hp(D) decay like
λm ≤ m−2p/d for m→∞. (11)
Proof: see in [Harbrecht’ 15].
LemmaThe eigenvalues of the Matern kernel decay like
λm ≤ Cm−(1+ 2νd
) for some C > 0. (12)
Proof: See [Graham’15] and [Harbrecht’15].
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
47 / 54
Another truncation estimation for the Matern kernel restricted tothe unit sphere (d = 2) from [Graham’ 15] is√√√√ ∞∑
m=M
λm ≤
√∫ ∞M
Cx−1−νdx =√νCM−ν . (13)
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
48 / 54
4*
Matern Fields (Whittle, 63)
Taken from D. Simpson (see also Finn Lindgren, Havard Rue,David Bolin,...)
TheoremThe covariance function of a Matern field
c(x , y) =1
Γ(ν + d/2)(4π)d/2κ2ν2ν−1(κ‖x − y‖)νKν(κ‖x − y‖)
(14)is the Green’s function of the differential operator
L2ν =
(κ2 −∆
)ν+d/2. (15)
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
49 / 54
4*
Gaussian Field and Green Function
A Gaussian field x(u) ∈ Rd with the Matern covariance is asolution to the linear fractional SPDE
(κ2 −∆)ν+d/2x(u) = W (u), κ > 0, ν > 0. (16)
W (u) - is spatial Gaussian white noise with unit variance.For all x , y ∈ Ω the Green function G (x , y) is the solution ofLG (·, y) = δy with b.c. G (·, y)|Γ = 0, where δy is the Diracdistribution at y ∈ Ω. The Green function is the kernel of theinverse L−1, i.e.,
u(x) =
∫Ω
G (x , y)f (y)dy . (17)
For L = −∆, G (x , y) is analytic in Ω.
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
50 / 54
4*
Bridge between numerical methods for PDEs and covariance
How we can use this bridge between numerical methods for PDEsand covariance ?See, e.g. [Bebendorf, Hackbusch 02,] Existence of H-matrixapproximation of the inverse FE-matrix of elliptic operators withL∞-coefficients. The Green functions of uniformly elliptic operatorcan be approximated by degenerate functions giving rise to theexistence of blockwise low-rank approximants of FEM inverses.
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
51 / 54
4*
The eigenvalue problem
∆u = λu in Ω = (0, 1)3
u = 0 on ∂Ω.(18)
The eigenvalues in Eq. 18 are
λ = λα+β+γ := π2(α2 + β2 + γ2), where α, βγ ∈ N. (19)
To solve Eq. 18 numerically (for testing purposes) one usually, first
discretize it by, e.g., using a piecewise linear basis(φ
(N)i
),
i = 1..N, in a subspace VN ∈ H10 (Ω) and then apply any classical
method, e.g. H-AMLS [Grasedyck & Gerds 15].
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
52 / 54
The discretized problem is
find (λ(N), xN) ∈ R× RN with
KxN = λNMx (N),(20)
where K ∈ NN×N is the stiffness matrix
Ki ,j := a(φ(N)j , φ
(N)i )
and M ∈ NN×N the mass matrix
Mi ,j :=(φ
(N)j , φ
(N)i
), i , j = 1..N.
Here the discretization step h := 1n+1 , N = n3. The eigenvalues of
the discrete problem Eq. 20 are approximating the eigenvalues ofthe continuous problem Eq. 18. See an approximation analysis in[Grasedyck & Gerds 15].
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
53 / 54
4*
Eigenvalues of((κ2 −∆)ν+d/2
)−1
TheoremLet ∆3 and ∆1 be the Laplace operators in 3D and 1D, I theidentity matrix. Then
∆3 = ∆1 ⊗ I ⊗ I + I ⊗∆1 ⊗ I + I ⊗ I ⊗∆1.
The eigenvalues of the shifted Laplace (κ2 −∆)ν+d/2 in the powerν + d/2 will be
κ2 + λ(α+β+γ)ν+d/2 =(κ2 + π2(λα + λβ + λγ)
)ν+d/2(21)
1L = 1
(κ2+π2(λα+λβ+λγ))ν+d/2 .
This is well-known Hilbert tensor 1α2+β2+γ2 , a low-rank tensor
decomposition of which is well known (see, e.g. B. Khoromskij).
Center for UncertaintyQuantification
Center for UncertaintyQuantification
Center for Uncertainty Quantification Logo Lock-up
54 / 54